REFERÊNCIA BIBLIOGRÁFICA
|
|
|
- Giuliana Olivares Neto
- 9 Há anos
- Visualizações:
Transcrição

1
2 Dados Internacionais de Catalogação-na-Publicação (CIP) Divisão Biblioteca Central do ITA/CTA Silva, Alex Sandro de Araújo Desenvolvimento Integrado CAD/CAM de Componentes para turbinas a Gás / Alex Sandro de Araújo. São José dos Campos, f. Tese de mestrado Curso de Pós-Graduação em Engenharia Aeronáutica e Mecânica, Área de Sistemas Aeroespaciais e Mecatrônica Instituto Tecnológico de Aeronáutica, Orientador: Dr. Eng. Mec. Jefferson de Oliveira Gomes. 1. CAD/CAM. 2. Fresamento 5-eixos. 3. Manufatura de Componentes de Turbinas a Gás. I. Centro Técnico Aeroespacial. Instituto Tecnológico de Aeronáutica. Divisão de Engenharia Mecânica-Aeronáutica. II. Desenvolvimento Integrado CAD/CAM de Componentes de turbinas a Gás / Alex Sandro de Araújo Silva REFERÊNCIA BIBLIOGRÁFICA SILVA, Alex Sandro de Araújo. Desenvolvimento Integrado CAD/CAM de Componentes para turbinas a Gás f. Tese de mestrado Instituto Tecnológico de Aeronáutica, São José dos Campos. CESSÃO DE DIREITOS NOME DO AUTOR: Alex Sandro de Araújo Silva TÍTULO DO TRABALHO: Desenvolvimento Integrado CAD/CAM de Componentes para Turbinas a Gás TIPO DO TRABALHO/ANO: Tese de Mestrado/ 2006 É concedida ao Instituto Tecnológico de Aeronáutica permissão para reproduzir cópias desta tese e para emprestar ou vender cópias somente para propósitos acadêmicos e científicos. O autor reserva outros direitos de publicação e nenhuma parte desta tese pode ser reproduzida sem a sua autorização (do autor). Alex Sandro de Araújo Silva Pr. Mal. Eduardo Gomes, 50. Vila das Acácias CTA-HTO Q.302 São José dos Campos - SP

3 DESENVOLVIMENTO INTEGRADO CAD/CAM DE COMPONENTES PARA TURBINAS A GÁS Alex Sandro de Araújo Silva Composição da Banca Examinadora: Prof. Dr. Luís Gonzaga Trabasso Prof. Dr. Jefferson de Oliveira Gomes Prof. Dr. Miguel Ângelo Menezes Prof. Dr. Cristiano Vasconcellos Ferreira Prof. Dr. Osiris Canciglieri Junior Presidente-ITA Orientador-ITA ITA CIMATEC-BA PUC-PR ITA

4 iii DEDICATÓRIA Dedico esse trabalho aos meus pais Vera Lucia de Araújo Silva e Raimundo Nonato da Silva, minha avô Tereza Machado da Silva e Francisco Ferreira de Araújo (Em Memória), Minhas Irmãs Izabel Cristina de Araújo Silva e Sônia Regina de Araújo Silva e especialmente a minha linda noiva Fernanda Cinthia Diniz Teixeira. Obrigado Deus por essa oportunidade! Alex Sandro de Araújo Silva Dezembro 2005.

5 iv AGRADECIMENTOS Em primeiro lugar, eu gostaria de agradecer ao meu orientador e amigo professor Jefferson de Oliveira Gomes, expert em tecnologia de usinagem e em sistemas produtivos, por sua ajuda e orientação na execução do trabalho aqui apresentado. As empresas membras da AIM em especial a UGS do Brasil, Siemens, Tecno-How e Sandvik por seu suporte técnico que tornaram possível o presente trabalho. Agradeço ao Everton por comandar uma máquina-ferramenta, como a Hermle C600 U, com extrema maestria em nossos ensaios, ao Wilson por suas idéias no desenvolvimento de dispositivos de fixação e habilidade para fabricá-los. E também a todos os amigos do laboratório Marcelo, Daniel, Oswaldo, Aluno PET (Gustavo) e Guilherme que contribuíram de uma forma ou de outra para o termino desse sonho ser mestre. FABRIC OF LIFE I want to say something to all of you Who have become a part Of the fabric of my life The color and texture Which you have brought into My being Have become a song And I want to sing it forever. There is a energy in us Which makes things happen When the paths of other persons Touch ours And we have to be there And let it happen When the time of our particular sunset comes Our things, our accomplishment Won t really matter A great deal. But the clarity and care With which we have loved others Will speak with vitality Of the great gift of life We have been for each other Anonymous

6 v RESUMO O trabalho aqui apresentado propõe um método para a utilização da cadeia CAD/CAM no fresamento 5-eixos de componentes de turbinas a gás. O método procura integrar as etapas CAD, CAM do processo de fabricação de componentes de turbinas a gás. O método aborda desde a modelagem dos componentes, evitando algumas características impróprias ao fresamento 5-eixos, passando pela simulação das trajetórias e pós-processamento e por fim fabricação dos componentes. A partir desse trabalho algumas informações importantes referentes à cadeia CAD/CAM puderam ser levantadas. De maneira geral, a abordagem da cadeia CAD/CAM para o fresamento 5-eixos deve considerar etapas anteriores ao da programação CAM, como a etapa CAD da cadeia, onde as geometrias são definidas, e posteriores, neste caso, simulação das trajetórias de ferramenta e pós-processamento do código CN. Ainda, foram feitas análises relacionadas aos tipos de interpolação que estão disponíveis para o fresamento de geometrias complexas. Essa análise é também apresentada no trabalho fazendo parte das contribuições que esse trabalho se propõe a dar. Os resultados são extremamente práticos e se propõem a serem utilizados de imediato na indústria. Eles vão desde restrições a modelagem de geometrias para o fresamento 5-eixos até informações referentes a uso de interpolações complexas no âmbito de fresamento de superfícies complexas. Procurou-se dar informações pertinentes ao fresamento 5-eixos em todas as etapas da cadeia CAD/CAM para esse processo de fabricação.

7 vi ABSTRACT This work proposes a method for the application of CAD/CAM chain in the 5-axes machining of gas turbine components. The method aims to integrate the CAD and CAM stages of the manufacturing process of gas turbine components. The method approaches the component modeling, the tool path simulation and pos-processing, and the component manufacture. Particularly, in the case of component modeling, it prevents the occurrence of improper features in the 5-axes machining. This work raised important information about CAD/CAM chain. Generally, in the case of 5-axes machining, the complete CAD/CAM chain must be considered. It includes stages previous to the CAM programming, such as the CAD stage of the chain, which defines the geometry of the components. It also includes activities posterior to the CAM programming, such as tool path simulation and NC code pos-processing. Analyses related to interpolation types had been performed and are among the important contributions of this work. Particularly, this work presents the results obtained for complex geometries machining. The results of this thesis are practical and can be directly applied to industry. They comprehend from the specification of geometry restrictions for 5-axes machining, to the proposal of guidelines for the application of complex interpolations in the context of free form surface machining. The thesis intended to approach and give contributions in all stages of CAD/CAM chain for the case of 5-axes machining.

8 vii SUMÁRIO 1 Introdução Histórico e motivação Escopo do trabalho Contribuições Estrutura do trabalho Revisão bibliográfica Sistemas CAD/CAM Histórico dos Sistemas CAD/CAM Modelagem de superfícies complexas Modelagem de sólidos Geração de trajetória de ferramenta Simulação e verificação de trajetórias Pós-processamento para fresamento 5-eixos Influências sob o fresamento 5-eixos Características de uma máquina ferramenta 5-eixos Fixação da peça Condições de contato da ferramenta Materiais e métodos Materiais de ensaio Máquina-ferramenta Ferramentas de corte Software CAD/CAM Equipamentos auxiliares Método utilizado nos ensaios Procedimento para análise de geometrias (IGES, PARASOLID) Procedimento para remodelagem para fresamento 5-eixos Procedimento programação CAM de componentes Procedimento para criação de simulador de máquina-ferramenta Procedimento para medição dos percursos da ferramenta de corte Pós-processamento dos programas Procedimento para fabricação dos componentes Procedimentos para medição de forma e acabamento da superfície usinada... 95

9 viii 4 Análise dos resultados Análise de geometrias importadas (IGES, PARASOLID) Análise da remodelagem de geometrias 3D para fresamento 5-eixos Análise das medições dos percursos da ferramenta de corte em tempo real Analise do simulador 3D da máquina-ferramenta Análise do processo de fabricação das superfícies Análise das medições das superfícies Usinadas Conclusões e sugestões para trabalhos futuros Conclusões Sugestões Referências bibliográficas

10 ix LISTA DE FIGURAS Figura 2.1: Computador Whirlwind sendo testado no MIT em Figura 2.2: Exemplo da linguagem APT Figura 2.3: Trecho de um arquivo CL (Cutter Location) Figura 2.5: Trecho de código ISSO (código G) de Figura 2.6: Sólido gerado a partir de operação de revolução Figura 2.7: Curva de Bézier e seus pontos de controle Figura 2.8: Polinômios de Bernstein com a ordem no intervalo de 0 a Figura 2.9: Exemplo de B-Spline pontos de controle e nós (knots) Figura 2.10: Cônica descrita por uma curva NURBS e seus pontos de controle Figura 2.11: Seções Cônicas (circulo, elipse, parábola, hipérbole) Figura 2.12: (a) NURBS descontínua, problemática para modelagem de superfícies (b) Gráfico de curvatura da NURBS mostrando sua descontinuidade Figura 2.13: Representação ambígua de um objeto em representação wireframe Figura 2.14: UG NX 3, exemplo de sólido e árvore booleana Figura 2.15: Geração de trajetória segundo o método isoparamétrico Figura 2.16: Pá de turbina Hidráulica fabricada por fresamento 5-eixos Figura 2.17: Eixos rotativos usados para posicionamento (desbaste em 3+2 eixos) Figura 2.18:Operação de desbaste do tipo Z-level Figura 2.19: Vetores normais são referencias para inclinação da ferramenta Figura 2.20: Verificação de trajetória com a retirada dinâmica de material Figura 2.21: Verificação de trajetória sem a retirada dinâmica de material Figura 2.22: Simulação de máquina-ferramenta Figura 2.23: Classificação de máquinas-ferramenta 5-eixos Figura 2.24: Influências sobre o fresamento 5-eixos Figura 2.25: a) Máquina-ferramenta 3-eixos XYZ b) Máquina-ferramenta 5-eixos XYZ no fuso e AC na mesa Figura 2.26: Volume gerado pelo movimento 5-eixos da ferramenta Figura 2.27: Aproximação 2D da trajetória 3D da ferramenta de corte Figura 2.28:Inclinação do cabeçote no fresamento de estampo Figura 2.29: Ferramenta de corte admitida como uma viga engastada Figura 2.30: Ferramenta de corte e seus modos de vibração... 64
... 31 Figura 2.")
11 x Figura 2.31: Rugosidade teórica (R th ) na direção transversal ao avanço Figura 2.32: Rugosidade teórica (R th ) na direção longitudinal ao avanço Figura 2.33: Comportamento da rugosidade real Figura 2.34: Características geométricas no fresamento 5-eixos Figura 3.1: Máquina-ferramenta utilizada nos ensaios Figura 3.2: Módulos do UG NX3, Modeling, Manufacturing, IS&V e PostBuilder.. 73 Figura 3.3: Rugosímetro utilizado nas medições de rugosidade das superfícies Figura 3.4: Equipamento utilizado para medição de peça Figura 3.5: Método aplicado aos ensaios Figura 3.6: Impelidor de turbina a gás escolhido para o estudo Figura 3.7: Modelo do impelidor escolhido para os testes Figura 3.8: Superfícies utilizadas para avaliação de geração de trajetória Figura 3.9: Inclinação da ferramenta de com relação a normal a superfície Figura 3.10: Analise Gaussiana (Curvatura Gaussiana) de superfícies Figura 3.11: Desbaste da geometria Figura 3.12: Estratégia para acabamento das superfícies Figura 3.13: Características geométricas da máquina-ferramenta Figura 3.14: Modelo CAD da maquina ferramenta simulada Figura 3.15: Sistema para aquisição de dados em tempo real do CNC Figura 3.16: Tolerância (intol/outol) para programação CAM Figura 3.17: Teste de interpolação de trajetória de ferramenta Figura 3.18: Dispositivo de fixação para a fabricação do componente Figura 3.19: Direção das medições de rugosidade realizadas na peça Figura 3.20: Montagem em bancada para medição de rugosidade Figura 3.21: Inspeção da geometria estudada no trabalho Figura 4.1: Procedimento de modelagem das pás de um compressor Figura 4.2: Parametrização original e superfície após operações booleana (trimming) Figura 4.3: Geração de trajetória de ferramenta na superfície Figura 4.4: Superfícies utilizadas para avaliação de geração de trajetória Figura 4.5: Trajetórias gerada para superfície com complexidade de borda Figura 4.6: Trajetória gerada para superfície com complexidade de borda 2 e β 15º Figura 4.7: Trajetória gerada para superfície com complexidade de borda 2 e β 45º Figura 4.8: Trajetória gerada para superfície com complexidade de borda 2 e α 15º

12 xi Figura 4.9: Trajetória gerada para superfície com complexidade de borda 2 e α 45º Figura 4.10: Trajetória gerada para superfície com complexidade de borda Figura 4.11: Analise Gaussiana após remodelagem Figura 4.12: Descontinuidade na superfície de proteção Figura 4.13: Velocidade para f z = 0,1 mm/z e tol.cam de 0,025 mm Figura 4.14: (a) Interpolação linear, (b) Interpolação Circular, (c) Interpolação Polinomial Figura 4.15: Tempo X Tolerância CAM para: (a) Linear (b) Circular e (c) Polinomial Figura 4.16: Velocidade para f z = 0,3mm/z para as interpolações: (a) Linear (b) Circular (c) Polinomial Figura 4.17: Simulação de processo de fresamento 5-eixos Figura 4.18: Perfis das pás submetidas a operações de acabamento Figura 4.19: Rugosidade da superfície de sucção para o maior R z Figura 4.20: Rugosidade da superfície de pressão para o maior R z Figura 4.21: Rugosidade da superfície de sucção para o menor R z Figura 4.22: Rugosidade da superfície de pressão para o menor R z Figura 4.23: Erro de forma encontrado nas medições feitas
 Linear (b) Circular (c) Polinomial... 111 Figura 4.17: Simulação de processo de fresamento 5-eixos... 113 Figura 4.")
13 xii LISTA DE TABELAS Tabela 2.1: Comparativo entre modelagem de superfícies e modelagem de sólidos Tabela 2.2: Características do corte discordante e concordante Tabela 3.1: Liga de alumínio classe 7000 propriedades mecânicas e composição química 70 Tabela 3.2: Ferramentas utilizadas na fabricação do componente Tabela 3.3: Parâmetros utilizados para geração das trajetórias Tabela 3.4: Parâmetros de corte utilizados na fabricação do componente Tabela 3.5: Matriz de teste para os ensaios de interpolações Tabela 3.6: parâmetros utilizados no rugosímetro... 97

14 xiii LISTA DE ABREVIATURAS E SÍMBOLOS β (Inclinação da ferramenta na direção paralela a direção de avanço) σ Desvio padrão α Inclinação da ferramenta na direção transversal a direção de avanço) a e Profundidade de corte radial a p Profundidade de corte axial APT Automatically Programmed Tools CAD Computer Aided Design CAM Computer Aided Machining CL Cutter Location CTA Comando Geral de Tecnologia Aeroespacial DIN Deutsches Institut für Normung f z Avanço por faca ou gume cortante GKS Graphical Kernel System GUI Graphic User Interface HSM High Speed Machining IGES Initial Graphics Exchange Specifications ISO International Organization for Standardization ITA Instituto Tecnológico de Aeronáutica KBM Knowledge Based Machining NC Numerical Control NURBS Nonunifome Rational B-Spline OpenGL Open Graphics Library PCs Personnel Computers PLM Product Life-Cycle Management

15 xiv R th Rugosidade teoria na direção transversal ao avanço da ferramenta R thf Rugosidade teórica na direção de avanço da ferramenta SGI Silicon v c Velocidade de corte WIMP Window Icon Menu Pointer

16 15 1 Introdução Neste capítulo é introduzido o assunto fresamento 5-eixos de componentes de turbinas a gás e são apresentados os elementos motivadores do presente trabalho. Em seguida, os objetivos gerais e específicos são delineados, bem como as contribuições que se pretende prover. 1.1 Histórico e motivação Projetos de turbinas a gás no CTA (Comando Geral de Tecnologia Aeroespacial) nasceram praticamente junto com o próprio CTA. Entretanto, desenvolvimentos nessa área somente tomaram proporções consideráveis na década de 70, com a criação de um programa de pesquisa dedicado a essa área. O CTA dava os seus primeiros passos para desenvolvimentos significativos [1]. O CTA conta com um moderno laboratório especialmente dedicado a turbinas a gás (Centro El Passo de referência em Turbinas a Gás), com uma bancada de testes para turbinas e uma câmara para testes de combustão. Estes laboratórios se dedicam ao projeto e desenvolvimento de pequenas turbinas a gás [2]. Com o advento da indústria aeroespacial, centenas de turbinas a gás foram importadas. No entanto, a indústria de manufatura local não foi impulsionada nesse mesmo compasso. Esse fato serve de motivação para o desenvolvimento dessa tese, bem como, a de fornecer opções a matriz energética nacional possibilitando a fabricação desses componentes no país a custos menores. Assim, pode-se deslumbrar o uso desses sistemas por uma parcela maior da sociedade possa desfrutar de mais essa opção de fornecimento de energia. Além dessas motivações, existe toda uma estrutura montada no Centro de Competência em Manufatura (CCM) que possibilita a fabricação dos componentes mais complexos de turbinas a gás.

17 Escopo do trabalho O objeto desta tese é o desenvolvimento de um método de utilização da tecnologia Five Axes Machining (fresamento 5-eixos) na fabricação de componentes de turbinas a gás. Procura-se com esse método assegurar um melhor uso desta tecnologia na fabricação deste tipo de componentes. Dentro desse contexto os objetivos desse trabalho foram delineados e são apresentados a seguir: 1. Definir um método integrado para modelagem em CAD (Computer Aided Design) e fabricação em CAM (Computer Aided Manufacturing) para geometrias complexas (free form surfaces) encontradas em componentes de turbinas a gás. Procurou se com isso integrar sistemas CAD/CAM através de boas práticas de modelagem e troca de informação entre sistemas das superfícies encontradas nesses componentes; 2. Definir e avaliar variáveis CAD/CAM para fresamento 5 eixos; 3. Avaliar a simulação cinemática da máquina ferramenta no processo de fresamento 5 eixos. Nesta etapa, objetivou-se definir um modelo cinemático para a máquina ferramenta do estudo, com a justificativa de prevenir colisões e avaliar o processo de pós processamento; 4. Avaliar diferentes interpolações de trajetória de ferramenta numa máquina ferramenta de construção conhecida. Nesta etapa, objetivou se obter informações a respeito dos movimentos dos eixos da máquina ferramenta, adquirindo informações a respeito do deslocamento e a velocidade dos eixos da máquina-ferramenta; 5. Avaliar os resultados da aplicação do método a partir da qualidade das superfícies de pressão e sucção de compressores utilizando diferentes parâmetros de corte, através de técnicas conhecidas para análise de superfícies de engenharia.
 e fabricação em CAM (Computer Aided Manufacturing) para geometrias complexas (free form surfaces) encontradas em componentes")
18 Contribuições A contribuição esperada deste trabalho atinge a indústria nacional. Foram Mostradas algumas nuances do fresamento 5-eixos que não são observadas e por vezes ignoradas quando se esta utilizando fresamento 3-eixos. Ainda como contribuição é apresentado um método para utilização das tecnologias CAD (Computer Aided Design), CAM (Computer Aided Manufacturing) e Five Axes Machining (fresamento 5-eixos) de forma condizente com os apelos produtivos que se vê na literatura. 1.4 Estrutura do trabalho O presente trabalho apresenta a seguinte estrutura: Capitulo 2: Será feita uma revisão bibliográfica a respeito do assunto CAD/CAM/CNC com a justificativa de contextualiza o trabalho numa realidade industrial existente. Capitulo 3: Neste Capitulo, são definidos os experimentos realizados no trabalho. Além disso, são descritos também os equipamentos, instrumentos e insumos utilizados durante os ensaios. Capitulo 4: Neste Capítulo, os resultados obtidos nos experimentos são analisados e discutidos. Capitulo 5: Neste Capítulo, são feitas a conclusões a cerca do trabalho e também são feitas sugestões para outros trabalhos que complementem a presente tese.

19 18 2 Revisão bibliográfica O presente capítulo destina se a descrever a fazer uma revisão bibliográfica, a respeito das variáveis envolvidas no processo de fabricação com sistemas CAD/CAM aplicadas ao fresamento 5 eixos. 2.1 Sistemas CAD/CAM Nas subseções seguintes procura-se, primeiramente dar ao leitor uma contextualização histórica (a longos das décadas) a cerca das tecnologias CAD e CAM. Por fim é feita uma revisão teórica a cerca do assunto que vai desde dos dois principais metodos de modelagem para obtenção de geometrias para a engenharia, modelagem de superficies complexas (free form modeling) e a modelagem de sólidos (solid modeling), passando pela geração de trajetorias de ferramentas e pós-processamento, até a verificaçao e simulação da trajetória criada Histórico dos Sistemas CAD/CAM A evolução da computação gráfica está diretamente relacionada à evolução dos computadores, tendo em vista que as técnicas utilizadas se aperfeiçoaram basicamente sustentadas pelo avanço do hardware e pelo conseqüente aumento da capacidade computacional. Nos anos 50, a Força Aérea Americana financiou um projeto no MIT (Massachusetts Institute of Technology) para o desenvolvimento do Computador Whirlwind. Como conseqüência desse projeto, outros desenvolvimentos no Laboratório de Servomecanismos do MIT foram financiados. Um desses projetos era o desenvolvimento de sistemas computacionais que hoje se conhece como Controle Numérico ou CN (Figura 2.1). Inicialmente, o controle numérico desenvolvido servia apenas para explorar e testar o computador Whirlwind. Essa pesquisa inicial levou a um projeto bem maior sobre o tema
 e a modelagem de sólidos (solid modeling), passando pela geração de trajetorias de ferramentas e pós-processamento, até a verificaçao e simulação da trajetória criada. 2.1.")
![19 controle numérico para fresamento 5 eixos de peças complexas, encontradas em aeronaves da época [3]. Em 1956 a empresa japonesa FANUC, hoje GE FANUC (junção da GENERAL ELETRIC com a FANUC Co.](/docs-images/17/98279/images/20-0.png "japonesa) foi a primeira empresa civil a desenvolver um controle numérico fora de pesquisas militares [4]. Figura 2.1: Computador Whirlwind sendo testado no MIT em 1951 [5].")
20 19 controle numérico para fresamento 5 eixos de peças complexas, encontradas em aeronaves da época [3]. Em 1956 a empresa japonesa FANUC, hoje GE FANUC (junção da GENERAL ELETRIC com a FANUC Co. japonesa) foi a primeira empresa civil a desenvolver um controle numérico fora de pesquisas militares [4]. Figura 2.1: Computador Whirlwind sendo testado no MIT em 1951 [5]. Nesta época, cada máquina ferramenta desenvolvida recebia uma solução diferente para a adaptação ao comando numérico, o que implicava no desenvolvimento de componentes e programação dedicada, ficando evidente a necessidade de uma padronização e da criação de uma linguagem que permitisse a troca de informações entre os diversos ramos da indústria [6]. A partir de 1958, através dos estudos realizados pela EIA (Electronic Industries Association), e das decisões tomadas neste fórum, houve a possibilidade da padronização do formato de entrada, conforme padrão RS 244 (Resolution Standard), regulamentado em 1961 e, mais tarde, em 1967, modificado pela RS 244a (DIN 66016). A instrução EIA RS 358 regulamenta a codificação adotada pela linguagem ISO [7].

21 Na década de 60, a computação gráfica avançou a partir de um programa de desenho, o Sketchpad, um sistema gráfico de comunicação homem máquina criado por Ivan Sutherland [8]. O Sketchpad propunha uma forma de interação muito semelhante à interface WIMP (Window Icon Menu Pointer). Usando uma caneta ótica, o Sketchpad permitiu que se obtivessem formas simples na tela do computador, podendo salva las e até reusá-las novamente. Ainda hoje, muitos padrões de interface gráfica têm o Sketchpad como base [5]. Também nessa época, começaram aparecer projetos de pesquisas e produtos comerciais para desenho auxiliado por computador CAD (Computer Aided Design), e de auxílio à fabricação de produtos da indústria automobilística e aeroespacial, CAM (Computer Aided Manufacturing) [5]. Nessa mesma década, os software CAM eram caracterizados pela programação manual. Nos sistemas prevalecia à utilização da linguagem APT (Automatically Programmed Tools) para a descrição simbólica das geometrias, ferramentas, e procedimentos para o corte, numa maneira independente da máquina-ferramenta (Figura 2.2) [3] PARTNO ELBOW FCGG 6 MULTAX CUTTER/0 15 TOLER/ CIR=CIRCLE/0,0,(S/2) 19 LI=LINE/(POINT/X,0), ATANGL, -(Y/(2*(Z-1))) 20 ST) P4(A)=POINT/CIR, ATANGL,ANG 21 P2(A)=POINT/INTOF, LI, (LINE/P4(A), ATANGL,90) 39 STC=TABCYL/NOZ, SPLINE, PT(1, THRU, 73) 40 INDIRP/PT(1) 41 GO/ON, STC 42 GORGT/STC, ON, (LL=LINE/P1(73), ATANGL, 90) 82 CALL/POC1, PT=.02, DT=.03, CT=.03, FNCUT=0 Figura 2.2: Exemplo da linguagem APT. [3]. 20
22 Outras linguagens como Prompt (Automatic Programming of Machine Tool), Adapt (Air Force Developed APT ou Adaptation of APT), Compact II, Action, entre outras, foram desenvolvidas a partir da idéia da simplificação dos comandos e das terminologias utilizadas na programação APT [9]. Numa fase posterior era gerado o posicionamento das ferramentas (CL Cutter Location file) para a especificação numérica da trajetória da ferramenta (tool path) e dados de controle da máquina ferramenta, ainda preservando a independência da máquina ferramenta (Figura 2.3) [3]. $$ PART PROGRAM CUTTER/0 SPINDLE/ON GOTO/3.145, , PPRINT PART IS FINISHED 21 Figura 2.3: Trecho de um arquivo CL (Cutter Location) [3]. Numa fase final acontece o pós processamento do código G (linguagem ISO), que especificava os eixos de movimentação de uma máquina ferramenta (Figura 2.4) [3]. G-CODE STATEMENT N010 G90 G92 X0 Y0 Z0 N020 S1000 M8 M3 N030 G0 X1.735 Y N040 G1 G91 Z-.5 F5.0 N050 G0 Z.5 N060 X0 Y0 M9 M5 Figura 2.4: Trecho de código ISO de 1970 (código G) [3]. Até próximo dos anos 70 o termo CAD nada mais era do que um aplicativo drafting que servia para criar desenhos 2D. Até que em 1972 foi desenvolvido por engenheiros da Renault, entre eles o francês Pierre Bézier o sistema CAD UNISURF [10].
23 22 Atualmente, o termo CAD é tido como uma forma de automação que ajuda projetistas a preparar modelos 3D e desenhos 2D, especificações, gerar listas de componentes, e outras tarefas relacionadas a atividades de projeto. A tecnologia CAD é utilizada para uma larga variedade de produtos de diversas áreas, tais como, arquitetura, eletrônica, aeroespacial, naval, e engenharia automotiva [11]. Similarmente, o termo CAM é uma forma de automação onde computadores comunicam instruções de trabalho diretamente a um sistema de manufatura. A tecnologia evoluiu das máquinas-ferramenta numericamente controladas dos anos 1950, que era feita a partir de um conjunto codificado instruções codificadas numa fita. Hoje um único computador pode controlar várias máquinas-ferramenta movendo o produto de maquina em maquina até os processos de manufatura está completo [11]. Os sistemas CAD/CAM foram desenvolvidos inicialmente, antes do UNISURF, por matemáticos que não estavam familiarizados com superfícies auxiliares de transição (raios de canto, chanfros, etc.), onde nos sistemas, essas superfícies eram esquecidas ou mesmo ignoradas. A forma final de um capô de carro era feita artesanalmente, na qual todos os cantos e chanfros eram acertados manualmente [10]. GOURAUD em 1971 desenvolveu um novo método de coloração de faces 3D (Gouraud Shading Method) [12]. No ano de 1972 foi criado um novo algoritmo de cálculo de visibilidade de superfícies 3D, usando técnicas de ordenação por NEWELL e SANCHA [13]. Este novo algoritmo se destacava por ser extremamente simples, conseqüentemente, ocupava pouca memória nos discos rígidos, além de ser rápido. Em 1973 foi desenvolvida na Xerox PARC (Palo Alto Research Center), a primeira matriz de pixels com 8 bits por pixel [14]. Foi ainda realizada a primeira conferência SIGGRAPH (Conferencia Internacional em Computação Gráfica e técnicas Interativas) [15].
24 23 No ano de 1974 foi desenvolvido por Catmull um novo método de visibilidade e coloração de faces (z-buffer) [16]. Em 1975, Phong desenvolveu um método de coloração de faces 3D capaz de reproduzir efeitos direcionais de iluminação (reflexões simples) [17]. No mesmo ano, Mandelbrot desenvolveu a teoria dos fractais [18]. No final da década de 70, em 1977, surgiu a primeira biblioteca gráfica de programação GKS (Graphical Kernel System) [19]. A biblioteca GKS é um padrão de visualização em 2D; nela não está incluída a modelagem de elementos 3D [20]. Nos anos 80, viu se a introdução de sistemas com interfaces gráficas, desaparecendo a caneta luminosa e as telas vetoriais, dando lugar aos mouses e as matrizes de pixels. Neste cenário, o hardware e o software eram comprados no mesmo pacote [3]. Em 1982, a SGI (Silicon Graphic Incorporated) foi criada, empresa especializada em equipamentos para computação gráfica, que liderou mais tarde a criação da biblioteca gráfica OpenGL. OpenGL é definida como "um programa de interface para hardware gráfico". Se Pode pensar o OpenGL como uma biblioteca de rotinas gráficas e de modelagem, bi (2D) e tridimensional (3D). Usando OpenGL é possível criar gráficos 3D com uma qualidade visual próxima da alcançada com o algoritmo ray tracer. Também no mesmo ano, a SUN, introduziu o conceito de estação gráfica em rede [5]. Entre 1983 e 1984, com a criação do Macintosh pela Apple, aconteceu a introdução da GUI (Graphic User Interface), assim tem-se o início de tudo que se conhece hoje em termos de interface com o usuário [5]. Iniciou-se o emprego de modelos digitais na concepção e manufatura de produtos. Ainda em 1984 foi desenvolvido um método de síntese de imagem baseado em teorias de transporte de calor, o qual foi chamado de radiosidade, método que é resolvido de forma progressiva através de técnicas interativas de resolução de sistemas de equações lineares. Em 1987 surgiu o primeiro sistema CAD/CAM integrado e chamado
25 24 EUCLID, software da empresa MATRA DATAVISION, de origem francesa. Ele foi a primeira plataforma CAD compatível a estações SUN SOLARIS [21]. Ao final dos anos 90, o barateamento do hardware envolvido com as soluções CAD/CAM fez com essa tecnologia pudesse ser adotada por empresas médias. As indústrias automobilística e aeroespacial deixaram de ser as que exclusivamente usavam essa tecnologia [22]. Os PCs baseados na plataforma INTEL tornaram-se o padrão para ambos os aplicativos CAD e CAM. A migração do 2D para o 3D acelerou bastante durante esse período. As geometrias 3D se tornaram muito comuns em todo o mundo tecnológico. O uso de sólidos tornou se difundido, e os software CAM aceitaram o uso dessa definição. Para os sistemas CAM, os anos 90 mostraram a introdução de re usinagem automáticas de regiões onde havia material deixado por uma operação anterior sem a necessidade de gerar a usinagem para toda peça [23]. Máquinas ferramenta HSC (High Speed Cutting) que suportavam rotações de rpm ou mais e comandos CN para atender essas máquinas foram desenvolvidos nos últimos anos. Consideráveis características foram introduzidas nessa época, tal como o uso de NURBS no código CN e a conseqüente suavização na transição entre blocos de programas CN. Essas mudanças nos sistemas CAD/CAM eram efetivamente necessárias para suportar as mudanças acontecidas em todo o hardware envolvido no processo [23]. Em fevereiro de 2004 a empresa americana de consultoria CIMdata referiu se aos anos 2000 como a era das Empresas Virtuais, que se baseiam em tecnologias digitais. Muitas corporações estão migrando para ambientes totalmente sem papel. Existe toda uma expectativa para que todo o desenvolvimento de um produto seja executado e acompanhado através de modelos digitais desses processos. A CIMdata considera manufatura digital ou virtual como sendo uma tecnologia emergente e o elemento chave do gerenciamento do ciclo de vida do produto. Muitas companhias estão estendendo suas soluções PLM (Product Life
26 25 Cycle Management) a abordar a engenharia de manufatura, incluindo funções de planejamento de processos e engenharia de produto e outros elementos do ciclo de vida do produto. Segundo CHRISTMAN a questão CAM está sendo tratada nos anos 2000 da seguinte forma [23]: Operabilidade e forte parceria entre produtos de empresas distintas de software, permitindo co existência numa solução integrada. O uso de funcionalidades orientadas graficamente, voltadas para todas as aplicações dos software CAM. Software específicos para determinadas aplicações têm sido criados, tentando alcançar determinados usuários (fresamento 5 eixos, softwares para programação na própria máquina ferramenta). Uso de modelos híbridos utilizando sólidos e superfícies para obter as vantagens que ambos podem oferecer. O ressurgimento do fresamento 5 eixos de posicionamento (fresamento 3+2) e o fresamento 5 eixos simultâneos como uma técnica de custo aceitável em consideração a sua produtividade. A introdução de software CAM com filosofia KBM (Knowledge Based Machining) ou softwares baseados no conhecimento do processo de usinagem, a partir de personalizações (custumizations) feitas no software pelo próprio usuário ou empresas especializadas Modelagem de superfícies complexas A modelagem de produtos com geometria complexa pode ser feita com várias técnicas. Estas podem ser divididas em dois grandes grupos, as que necessitam de dados de entradas como por exemplos dados de digitalização (fitting techniques) e as que não necessitam de nenhum conhecimento prévio do que se quer modelar (ab initio techniques) [20]. Para o

27 26 primeiro grupo podem-se citar as curvas e superfícies do tipo spline e para o segundo as curvas e superfícies de Bézier e B-splines. Mesmo com a variedade de técnicas existentes para a modelagem de geometrias complexas ainda se encontra casos onde os projetistas não às utilizam preferindo o uso de geometrias como retas e cônicas. Como conseqüência dessa prática, pode se obter modelos tridimensionais com suas superfícies descontinuas. Essas descontinuidades são prejudiciais a etapas posteriores do desenvolvimento do produto, tais como, analise através de elementos finitos e a própria fabricação das superfícies. A Figura 2.5 mostra descontinuidades numa das superfícies do sólido de revolução gerado a partir do perfil também mostrado na figura. A descontinuidade é ocasionada pelas curvas geratrizes do perfil serem elementos geométricos distintos (duas linhas e um arco). Figura 2.5: Sólido gerado a partir de operação de revolução. A geometria mostrada na Figura 2.5 é tipicamente encontrada em componentes de turbinas a gás, cubo (hub de um impelidor). Devido a exigências de fabricação do componente faz se necessário o uso de uma única e contínua superfície para a geometria mostrada em substituição ás três existentes no modelo (superfície funcional única). O que aconteceu com esse modelo é que a condição de continuidade foi imposta as curvas geratrizes essa condição não e satisfeita para a superfície de revolução gerada.
 é frequentemente utilizado para troca de informações entre vários sistemas CAD/CAM existentes [20].")
28 27 A troca de informação entre os vários sistemas CAD/CAM existentes é realizada, muitas vezes, no formato de superfícies 3D. Desde 1983, o formato IGES (Initial Graphics Exchange Standard) é frequentemente utilizado para troca de informações entre vários sistemas CAD/CAM existentes [20]. As curvas e superfícies B-Spline racionais são o padrão utilizado para representação de geometrias 2D e 3D. Isso explica, em parte, o uso de NURBS (Non- Uniform Rational B-Splines) para modelagem de formas complexas com o passar dos anos. Além disso, disso existem outras vantagens relacionadas ao o uso de NURBS na modelagem de superfícies complexas [24]: Oferece uma forma canônica para a representação de formas analíticas e complexas (free form); Fornece a flexibilidade para a modelagem de uma larga variedade de formas; Podem ser encontrados por algoritmos numericamente estáveis e precisos; Oferece boa interpretação geométrica e poderosas ferramentas geométricas; São generalizações das representações de curvas e superfícies B-Spline não racionais, Bézier racionais e Bézier não-racionais [25]. As curvas racionais de Bézier são definidas por polígonos de controle um exemplo pode ser visto na Figura 2.6. Figura 2.6: Curva de Bézier e seus pontos de controle [26].

29 28 Onde r é a ordem, B i, r () t C n i = B 0 i, r = n B i= 0 i, r ( t) () t w P i w i i Eq. 2.1 são os polinômios de Bernstein (Eq. 2.2). Na Figura 2.7 são mostrados os polinômios de Bernstein com a ordem do polinômio no intervalo de 0 a 2. Na Figura 2.6 são mostrados ainda os pontos de controle Pi, e pesos do ponto dos controle wi [26]. B t i! t r!( i r)! r ( i r) i, r ( ) = (1 ) t Eq. 2.2 Figura 2.7: Polinômios de Bernstein com a ordem do polinômio no intervalo de 0 a 2 [27]. Do ponto de vista matemático, uma curva gerada a partir dos vértices de um polígono de controle é dependente de algum método de interpolação ou aproximação para estabelecer a relação entre a curva e o polígono de controle. Esse método de interpolação é definido quando se escolhe a função base. No caso da curva de Bézier a função base utilizada são os polinômios de Bernstein. Uma curva B- Spline que é mostrada na Figura 2.8 é a generalização das curvas de Bézier [26]. Figura 2.8: Exemplo de B-Spline, pontos de controle e nós (knots).[26].
30 Considere que um vetor conhecido como vetor nodal (knot vetor) seja definido como segue: T = t, t,..., t } Eq. 2.3 { 1 2 m onde T é uma seqüência de números não decrescente com [ 0,1] de controle P P,...,. 0, 1 P n i 29 t e definem os pontos Define-se como grau p o seguinte argumento matemático: p = m n 1 Eq. 2.4 onde m é o numero de nós e n é numero de pontos de controle. Define-se a função base como: N N i,0 i,0 () t 1 se ti t < ti+ 1 e ti < ti = Caso Contrário 0 t t t t t t i, p 1 t t i () t = N () t + N () t i+ p i + 1 i+ 1, p 1 Eq. 2.5 A curva B Spline (Base Splines), portanto é da forma: C n () t = PN () t i= 0 i i, p Eq. 2.6 Entretanto, uma das falhas desse equacionamento matemático é a necessidade de informações extras para definição de formas relativamente simples [24]. Por exemplo, para se definir um circulo precisasse do centro do circulo e de seu raio ou diâmetro, entretanto, se uma B-Spline é utilizada para definir um circulo são utilizados 4 pontos de controle (Figura 2.9). Uma curva NURBS é definida por quatro entidades matemáticas: grau, pontos de controle, nós (knots), e uma regra de avaliação.

31 30 Figura 2.9: Cônica descrita por uma curva NURBS e seus pontos de controle. O grau ( p ) é um número inteiro positivo, que é usualmente 1, 2, 3 ou 5. Linhas e poli linhas tem usualmente grau 1, círculos NURBS têm grau 2, e a maioria das curvas de forma complexa tem grau 3 ou 5. Algumas vezes os termos linear, quadrática, cúbica, e quíntica são usados para descrever os graus dessas curvas. Linear significa grau 1, quadrática significa grau 2, cúbica significa grau 3, e quíntica significa grau 5. A ordem de uma curva NURBS é um numero positivo igual a (p+1). É possível aumentar o grau de uma curva NURBS e não mudar a sua forma, mas, o mesmo, não acontece quando se reduz o grau [20]. O número dos pontos de controle é pelo menos (p+1) pontos. Uma das formas mais fáceis de mudar a forma de uma curva NURBS é mover seus pontos de controle. Os pontos de controle têm um número associado a cada um deles chamado peso. Com poucas exceções, os pesos são números positivos. Quando os pontos de controle têm o mesmo peso (usualmente 1), a curva é chamada de não racional, de outra forma, a curva é chamada racional. Na prática, a maioria das curvas NURBS são não racionais. Poucas curvas NURBS são sempre racionais, por exemplo, seções cônicas (círculos, elipses, hipérbole e parábolas) (Figura 2.10) [29].
32 31 Parábola Hipérboles Elipse Círculo Figura 2.10: Seções Cônicas (circulo, elipse, parábola, hipérbole) [30]. O vetor nodal tem a mesma definição encontrada em curvas B Splines. Esse vetor deve satisfazer várias exigências. A forma padrão para assegurar que estas exigências sejam satisfeitas, é limitar o número de valores duplicados no vetor nodal a menor ou igual ao grau p da curva. O número de vezes que um componente do vetor nodal é duplicado é chamado multiplicidade. Um nó é dito ser de multiplicidade completa se ele é repetido n vezes e simples se o nó é repetido uma vez [29]. Por exemplo, se uma curva NURBS de grau 3 com 7 pontos de controle tem o vetor nodal na forma 0, 0, 0, 1, 2, 3, 4, 4, 4, o vetor nodal é uniforme. Já o vetor 0, 0, 0, 1, 2, 5, 5, 6, 6, 6 é não-uniforme. As letras N e U em NURBS significam Não-Uniforme (non-uniform) e indicam que o vetor nodal numa curva NURBS é permitido ser não-uniforme. Valores duplicados no meio desse vetor fazem com que uma curva NURBS seja menos suave. Um vetor nodal que tenha multiplicidade completa nos seus valores intermediários significa existir um ponto na curva que pode ter uma descontinuidade geométrica (corner). O que ocasiona problemas na geração de superfícies (Figura 2.11) [29].

33 32 Figura 2.11: (a) NURBS descontínua, problemática para modelagem de superfícies. (b) Gráfico de curvatura da NURBS evidenciando sua descontinuidade. Por essa razão alguns projetistas gostam de adicionar e remover nós e então ajustar os pontos de controle para criar curvas suaves. Uma vez que o numero de nós m é igual a (n+p- 1), onde n é o numero de pontos de controle, quando se adiciona nós também se adiciona pontos de controle e vice-versa. Nós (knots) podem ser adicionados sem mudar a forma da curva NURBS original. No entanto, quando se removem nós, se altera a forma original da curva [29]. A equação de uma curva recebe um número e atribui a um ponto. A equação de uma curva NURBS é uma equação, que envolve o grau, pontos de controle, e nós (Eq. 2.6). C () t n i= N 0 i, r = n N i= 0 i, r ( t) () t w P i w i i Eq. 2.7 onde r é a ordem da NURBS, são as funções base B-spline, P são os pontos de N i, r controle, e w é o peso do ponto de controle P [25]. De forma similar, para uma superfície B- i Spline não-uniforme de grau (r, q) tem-se: i i S ( u, v) m n i= j= N ( u) N j, q( v) wi ( u) N ( v) 0 0 i, r, j i, j = m n N w P i= 0 j= 0 i, r j, q i, j Eq. 2.8
34 onde e são as funções base B-spline, são os pontos de controle, e é o N i, r P i, j N i, q peso do ponto [31]. P i, j w i, j Modelagem de sólidos Desde sua introdução a mais de uma década, os sistemas CAD/CAM que usam modelagem sólida estão cada vez mais populares. No início essa tecnologia era encontrada apenas nas grandes corporações aeroespaciais e automobilísticas. Segundo FARIN, quando a modelagem sólida tornar-se totalmente aceita, ela será hábil a incorporar superfícies e curvas complexas (free-form curves and surfaces) [10]. Nota-se que FARIN estava correto principalmente, pelo que se pode presenciar atualmente nos sistemas CAD/CAM[10]. Como um campo de estudo, área do conhecimento, etc., pode-se dizer que a modelagem sólida é um ponto de convergência de varias outras áreas em desenvolvimento como por exemplo, sistemas para desenho 2D (drafting), sistemas para modelagem de superfícies complexas (free-form surfaces) [32]. Os primeiros esforços para automatizar os sistemas drafting resultaram em sistemas de modelagem wireframe. Eles são considerados a primeira contribuição para criação de sistemas com modelagem de sólido. Nesses sistemas (wireframes) somente as arestas, e vértices dos objetos são representados. Essa é de certa forma uma representação natural, assumindo se que o objetivo é gerar linhas de desenho de um projeto de engenharia, projetadas em certas direções (gerar vistas ortográficas de um objeto 3D). Infelizmente, podem existir ambigüidades na interpretação nessa forma de representação [32]. Um simples exemplo dessas ambigüidades é mostrado na Figura 2.12.
35 34 Representação de sólidos através de wireframe Representação de sólido através de rendering Figura 2.12: Representação ambígua de um objeto em representação wireframe. A Figura 2.12 mostra um bloco com um furo chanfrado que passa através do centro. Não é possível deduzir através de uma representação em wireframe qual a direção do furo, desde que ele aparentar ter as três direções principais. Por conta dessas ambigüidades, wireframe não é a representação preferida para objetos 3D. Por outro lado, os objetos representados ocupam pouco espaço de memória podendo ser acessados rapidamente. Wireframe constituem uma forma de visualização satisfatória em muitas situações, e pode fornecer rápidas informações ao projetista. Por essa razão, muitos sistemas ainda oferecem a possibilidade de gerar visualizações em wireframe [32]. Baseados na modelagem sólida, algorítmos podem ser desenvolvidos para algumas aplicações tais como, obtenção de massa e peso de componentes, centro de gravidade, momento de inércia, analises com o método dos elementos finitos, compilação de tecnologia de grupo e planejamento de processos [33].

36 35 A integração CAD/CAM está diretamente relacionada à cooperação e colaboração entre essas duas tecnologias presentes no ciclo de vida de um produto. Essa integração é extremamente beneficiada com o uso de modelagem sólida. Um modelo sólido pode ser carregado num ambiente CAM e rapidamente analisado através de algoritmos de reconhecimento de características (features) [33]. Há sistemas que mesmo depois de carregado, o modelo não perde sua ligação com o ambiente de origem (CAD). Essa tecnologia possibilita a rápida atualização de programas CN [34]. As duas formas mais usadas para representação de sólidos são CSG (Construtive Solid Geometry) e B-rep (Boundary Representation). Na representação CSG, o sólido é uma árvore booleana constituída de objetos primitivos (cilindros, cones, esferas e blocos) e operadores booleanos (Figura 2.13). Na representação B-rep, um sólido é modelado através das superfícies que o delimita. Desta maneira o sólido é matematicamente representado explicitamente [33]. Figura 2.13: UG NX 3, exemplo de sólido e árvore booleana.
37 36 As duas formulações podem ser utilizadas em ambientes CAM. Entretanto, um sólido em CSG é implicitamente definido; isto é, sua forma não é conhecida sem as operações booleanas associadas. Um sólido representado em B-Rep é explicitamente definido; suas geometrias primitivas, isto é, faces, arestas e vértices são interpretadas como informações de baixo nível (informações muito especificas) e não podem ser utilizadas no desenvolvimento de algumas aplicações, tais como planejamento de processos que utilizam algoritmos de reconhecimento de características (features) [33]. A modelagem B-rep possui algumas vantagens sobre a CGS, principalmente no tocante a versatilidade na geração de modelos complexos e na velocidade de verificação de relações topológicas. Isto acontece devido à maneira como o método registra as informações do modelo, armazenando os parâmetros das arestas e faces de forma explícita [35]. Os métodos de modelagem sólida CSG e B-rep são frequentemente combinados para gerar modelos 3D. Cada um desses métodos possui suas limitações, geometrias de difícil modelagem podem ser geradas mais facilmente usando a combinação de ambos os métodos. A maioria dos sistemas modeladores de sólido de grande porte utiliza tanto o método CSG quanto o B-rep [35]. Na literatura, uma característica (feature) é considerada como uma informação de alto nível apropriada para o desenvolvimento de planejamento automático de processos que pode ser diretamente ligada a um sistema CAD [36]. As Features podem ser pensadas como formas primitivas de engenharia com relevância a alguma tarefa de engenharia [35]. O significado técnico de uma feature pode envolver a função para qual ela foi criada, como ela pode ser produzida, que ações a sua presença deve desencadear, que formas de fabricá-las estão disponíveis, etc. A modelagem por features com os anos vem ganhando espaço principalmente no desenvolvimento de componentes mecânicos. O método permite criar entidades geométricas
38 37 simples tais como furos, chanfros, rasgos, etc. A modelagem por features é baseada na idéia de se modelar utilizando blocos de construção (building blocks) [37]. Ao invés de se usar formas analíticas como paralelepípedos, cilindros, esferas e cones como geometria primitiva, o usuário cria modelos do produto usando geometria primitiva de maior nível, portanto, mais relevantes para sua aplicação específica. Esta abordagem faz com que os sistemas de modelagem sólida fiquem mais fáceis de serem utilizados. Entretanto, o conjunto fixo de features oferecido pelos atuais modeladores ainda é limitado fazendo com que as possibilidades do projetista sejam escassas. Essa limitação mostra que as features devem ser adaptáveis aos usuários e que as bibliotecas de features devam ser extensíveis. Muitas pesquisas têm sido feitas na extração de características de usinagem (machining features) a partir dos contornos de um modelo ou a partir das características (features) de uma peça e a transformação das características de usinagem num processo de usinagem usando regras definidas em processo baseado no conhecimento. Entretanto, a integração baseada na associação ao nível de características (features)-operações não é eficiente como ao nível de peça-processo onde uma peça é diretamente associada com operações de usinagem, e a parâmetros de usinagem [37][38]. GAO (2004) propôs um método para extração de características (features) de usinagem[39]. Segundo ele uma feature é um meio de informação na integração CAD/CAPP/CAM. Existem diferentes pontos de vistas do que seja uma feature. A do projetista CAD que tem uma feature como uma característica de forma relacionada à função do componente, à intenção de projeto ou à metodologia para construção do modelo. A do programador CAM que considera uma feature uma forma geométrica associada a distintas operações de usinagem. A modelagem sólida paramétrica permite que se criem modelos de produtos com dimensões parametrizadas. As dimensões podem ser ligadas através de expressões
39 38 matemáticas. Ligações bidirecionais entre o modelo e o dimensionamento permitem a regeneração automática de modelos depois de mudanças dos parâmetros e atualização automática das dimensões relacionadas. Os sistemas CAD paramétricos que não provêem esta bi-direcionalidade, devido à complexidade envolvida penalizam o projetista. Este tem que pensar na estruturação das ligações dimensionais antecipadamente, sem o que, a alteração do modelo pode implicar em que ele seja refeito [35]. Nos últimos anos, o número de usuários de modelagem sólida vem aumentando e esses usuários vêm encontrando algumas dificuldades. Principalmente no que se refere às limitações em algumas áreas de geração de superfícies complexas. Essas dificuldades fazem com que os sistemas cada vez mais, estejam incorporando módulos para modelagem de superfícies complexas (Free Form Modeling) [40]. A Tabela 2.1 faz uma síntese das seguintes vantagens da modelagem de superfícies sobre a modelagem de sólidos e vice-versa [40]. Tabela 2.1: Comparativo entre modelagem de superfícies e modelagem de sólidos. Modelagem de superfícies Mais flexível na modelagem de geometrias complexas (manipulação dos pontos de controle) Capacidade de modelagem interativa Rápida criação e atualização de componentes complexos Excelente para criação estética e ergonômica de modelos complexos Modelagem de sólidos Fácil de Aprender/usar Parametrização e associabilidade dos modelos Rápida criação e atualização de montagens (assemblies) Excelente para criação de modelos funcionais Geração de trajetória de ferramenta O fresamento de componentes de turbinas á gás que envolve superfícies complexas necessita de fresamento em 5-eixos. Essa necessidade é justificada pelo aumento significativo
40 39 de eficiência do processo a partir dessa técnica com o uso de poucas, se não uma, fixação, e melhores condições de contato da ferramenta de corte e a peça. Entretanto, os sistemas CAM que possuem módulos para fresamento 5-eixos têm a sua geração de trajetória de ferramenta, ainda muito dependentes do nível de conhecimento e da interação do usuário. Uma das desafiadoras tarefas encontradas na literatura é a geração de trajetórias de ferramentas, livres de erros, sem a interferência e a experiência do programador CAM [41][42][43][44]. Para a geração de trajetória de ferramentas vários métodos têm sido desenvolvidos [45][46]. Os métodos comumente usados podem ser classificados como: Métodos iso-paramétricos [47][48][49]; Métodos iso-planares ou cartesianos [50][51][52]; Métodos com altura de cristas constante (iso-scallop) [53][54][55][56]. Devido à complexidade geométrica das superfícies dos componentes aqui tratados é difícil obter uma trajetória de ferramenta ótima. Os métodos tradicionais (iso-paramétricos, iso-planares e iso-scallop) iniciam a determinação da trajetória a partir das bordas da superfície. A trajetória adjacente à última é determinada baseada nesta e assim por diante (figura 2.14). Desta maneira, contanto que uma borda inicial seja selecionada, toda a trajetória da ferramenta é quase que totalmente determinada. Apesar de que os métodos tradicionais considerem a geometria da superfície localmente durante a geração da trajetória, essa consideração é limitada a uma verificação de invasão da superfície pela ferramenta [57][58][41].
41 40 Figura 2.14: Geração de trajetória segundo o método isoparamétrico. Dois critérios são geralmente usados para avaliar as estratégias de corte implementadas nos sistemas CAM. O primeiro preocupa-se com a validade da estratégia e o segundo com a eficiência [48]. [59] sugeriu que a trajetória ótima no fresamento 5-eixos são as que são paralelas às bordas mais longas de uma superfície. MARCINIAK e KRUTH analisaram as direções de corte conjuntamente as propriedades geométricas de superfícies [60][61]. Eles concluíram que a direção ótima de corte acompanha a maior profundidade radial de corte (a e ), quando a trajetória da ferramenta se alinha à curvatura principal de uma superfície. SARMA mostrou que trajetórias adjacentes não são paralelas umas as outras em superfícies complexas [62]. O passo lateral (a e ) entre duas trajetórias adjacentes não é necessariamente igual. O método isoparamétrico para a geração de trajetória leva a vantagem da representação paramétrica da superfície e é o método de geração mais frequentemente utilizado. Mantendo-
42 41 se um dos parâmetros constantes, as curvas isoparamétricas são formadas e empregadas para a geração da trajetória de ferramenta [49]. As trajetórias de ferramenta isoparamétricas são frequentemente mais densas em algumas regiões das superfícies do que outras devido à transformação não uniforme entre o espaço paramétrico 2D e Euclidiano [48]. Isso resulta numa distribuição de altura de crista não-uniforme na superfície usinada e tempo de usinagem não otimizado devido aos passes redundantes [63]. No processo CAD/CAM, um objeto sólido é freqüentemente representado por uma combinação de duas ou mais entidades geométricas genéricas. Desta forma, superfícies parametrizadas predefinidas, usualmente estão sujeitas as operações booleanas de trimagem (trimming) ou alargamento (extending). Usualmente, as curvas de intersecção que são resultado das operações booleanas mencionadas (trimming) não coincidem com as curvas isoparamétricas originais. Como resultado, as curvas iso paramétricas originais não estão mais adaptada às bordas. Consequentemente, quando as superfícies são submetidas a processos de geração de trajetória de ferramenta essa trajetória pode não ser satisfatória [64]. Portanto, a tarefa de reparametrizar superfícies trimadas (trimmed surfaces) é de fundamental importância se essas superfícies estão numa cadeia CAD/CAM. O método de interpolações algébricas ou interpolação bilinear (Coons method) [10][20] e o método de Laplace [64][65] são os dois principais métodos existentes, o primeiro por sua simplicidade e o segundo por resolver alguns problemas do primeiro. Em ambos os métodos, o domínio paramétrico 2D da superfície trimada é reparametrizado num novo domínio paramétrico 2D unitário. Depois trajetórias de ferramentas são geradas de acordo com o novo conjunto de parametrização. Em teoria, as estratégias principais para fresamento de superfícies complexas em 5-eixos podem ser classificadas em fresamento de topo (com a ponta da ferramenta) e fresamento
 no fresamento de grandes superfícies, como as pás de turbinas hidráulicas (Figura 2.15).")
43 42 periférico (com a periferia da ferramenta). Em geral, o primeiro utiliza ferramentas de topo toroidal (topo reto com raio) no fresamento de grandes superfícies, como as pás de turbinas hidráulicas (Figura 2.15). O segundo, usa ferramentas cilíndricas e utiliza a periferia da ferramenta para o corte. Esse tipo tem uma grande aplicação no fresamento de componentes médios e pequenos, entretanto mais complexos, tais como, componentes de turbinas a gás [66]. Figura 2.15: Pá de turbina Hidráulica fabricada por fresamento 5-eixos [67]. As operações de desbaste definem os processos que possuem as maiores taxas de remoção de material (Q) do bloco inicial no fresamento de impelidores, essas operações definem uma pré forma dos componentes. Um aumento nas taxas de remoção no desbaste aumenta consideravelmente a eficiência de fabricação componente em sua totalidade. Essas operações podem influenciar não só no tempo mais também na precisão do impelidor nas operações de acabamento. Para tanto, o material residual presente nas superfícies depois do desbaste afetarão o acabamento final das superfícies [68]. Além disso, as superfícies deixadas pelo desbaste influenciam na vida das ferramentas. Se for deixado sobremetal excessivamente nas superfícies, podem ser necessárias operações
![43 de semi acabamento para evitar danos às ferramentas no acabamento e deixar as superfícies com uma camada de sobremetal constate [68].](/docs-images/17/98279/images/44-0.jpg "Efetivamente, não se tem implementações de rotinas para fresamento de desbaste em 5- eixos simultâneos na maioria dos sistemas CAM [54].")
44 43 de semi acabamento para evitar danos às ferramentas no acabamento e deixar as superfícies com uma camada de sobremetal constate [68]. Efetivamente, não se tem implementações de rotinas para fresamento de desbaste em 5- eixos simultâneos na maioria dos sistemas CAM [54]. O usual é a utilização de fresamento de posicionamento (fresamento 3+2), neste caso, a ferramenta de corte permanece com a mesma orientação durante a operação, os eixos rotativos são usados somente para o posicionamento da ferramenta com relação a peça de forma a se ter o melhor acesso ao volume de material que vai ser retirado (Figura 2.16) [69]. Figura 2.16: Eixos rotativos usados para posicionamento (desbaste em 3+2 eixos) [69]. Existem muitas estratégias para fresamento de superfícies em 3-eixos, comuns a maioria dos sistemas CAM e que são usadas também no fresamento 3+2. Numa rápida observação dos sistemas CAM presentes no mercado pode-se ver que cada desenvolvedor fornece soluções semelhantes para fresamento em 3+2 eixos [70]. O fresamento por níveis (Z-level), bastante
 visto que a profundidade de corte para cada passe é constate fazendo com que a operação seja mais estável (sem sobrecarga na ferramenta de")

45 44 comum na maioria dos sistemas, consiste na geração dos contornos criados a partir da intersecção de planos com a superfície que será fabricada (Figura 2.17). Utiliza-se essa estratégia em operações de desbaste (3+2) visto que a profundidade de corte para cada passe é constate fazendo com que a operação seja mais estável (sem sobrecarga na ferramenta de corte). Para operações de acabamento essa estratégia é menos desejável porque a geometria dos degraus deixados pelos passes pode variar consideravelmente fazendo com que sejam necessárias operações de polimento. Figura 2.17:Operação de desbaste do tipo Z-level. A grande aplicação hoje para o fresamento 5-eixos simultâneos está nas operações de acabamento que são caracterizadas pela pequena quantidade de material retirada da peça e que necessitam de condições de contato entre a ferramenta e a superfície de trabalho constante. O método de Sturz ou da ferramenta inclinada é o método preferido dos desenvolvedores de aplicações para fresamento 5-eixos. Isso se deve a sua simplicidade computacional relativa aos demais métodos desenvolvidos até então. Nesse método a ferramenta é inclinada num ângulo arbitrário com respeito a normal superfície que está sendo usinada (Figura 2.18) [70]. A grande dificuldade encontrada no método de Sturz é no uso de ferramentas de topo reto e topo reto com raio ou toroidais. Se o ângulo de inclinação da ferramenta for pequeno,

46 45 invasões podem acontecer devido à curvatura da superfície. Entretanto, se o ângulo de inclinação for grande as cristas de fresamento se tornam maiores. Isto faz com que o método dependa bastante da experiência do programador. Para resolver esses problemas alguns métodos foram propostos na literatura. Em GRAY podem ser encontradas informações a respeito desses novos métodos para geração da trajetória da ferramenta em 5-eixos [70]. Como os métodos multipontos, eixo principal e eixo principal modificado. Entretanto, esses métodos têm limitações em sua implementação nos sistemas em virtude da falta de robustez e complexidade de implementação nos sistemas CAD/CAM [70][71]. Figura 2.18: Vetores normais são referencias para inclinação da ferramenta Simulação e verificação de trajetórias O conceito de manufatura virtual emprega as últimas tecnologias computacionais para reproduzir graficamente os processos de manufatura, incluindo máquinas-ferramenta CNC e operações associadas. As ferramentas para simular o processo de usinagem e verificar a precisão do processo, antes mesmo que essa ordem de serviço esteja na máquina-ferramenta, é o tema desse sub-capítulo.

47 46 Sem simulação, as trajetórias de ferramentas são testadas repetidamente nas máquinasferramenta. Conseqüentemente, os pequenos erros são por vezes não detectados e ignorados e só percebido em estágios avançados da Cadeia CAD/CAM/CNC [72]. A verificação CN simula o processo de remoção de material em varias operações de usinagem com o objetivo de detectar erros na programação (Figura 2.19). A simulação da máquina-ferramenta representa graficamente os movimentos dos componentes da máquina quando uma programa NC é executado para detectar possíveis colisões [73]. Figura 2.19: Verificação de trajetória com a retirada dinâmica de material (UG NX3). Nota-se que a simulação mostrada na Figura 2.19 é, para o caso de fresamento 5-eixos, limitada em virtude de não considerar os componentes da máquina-ferramenta. Encontram-se na literatura relacionada à manufatura virtual algumas referências aos termos pós-processamento reverso e otimização CN. Os softwares desse gênero, respectivamente interpretam e simulam os códigos CN escritos para uma ampla variedade de controles CNC e particularmente, ajustam as velocidades de avanço e velocidades de corte para reduzir os tempos de usinagem e maximizar o tempo útil de utilização de máquina [74][75].
 nas peças, erros de programas e colisões de componentes da máquina-ferramenta [72].")
48 47 Avanços recentes na tecnologia dos computadores pessoais e as tecnologias gráficas 3D permitem uma adesão cada vez maior dessas soluções pela indústria de manufatura. Essas soluções estão aptas a detectar e evitar invasões (Gouges) nas peças, erros de programas e colisões de componentes da máquina-ferramenta [72]. a) Verificação CN Os softwares de verificação CN simulam graficamente o processo de remoção de material pela continua atualização da forma sólida gerada quando a ferramenta move-se ao longo de sua trajetória para produzir a peça final. Os softwares aceitam tanto código ISO ( código G) como APT-CL (Cutter Location) ou outro arquivo de trajetória CAM como entrada e simulam o processo de usinagem como um todo (Figura 2.20) [74].. Figura 2.20: Verificação de trajetória de ferramenta sem a retirada dinâmica de material (UG NX3). Pode-se citar como benefícios a detecção de erros de programas CN ainda na fase CAM da Cadeia CAD/CAM/CNC, como colisões e invasões, eliminação de operações em vazio, que consomem tempo de máquina, reduzindo assim as peças refugadas e os custos totais [75]. Um bom Simulador CN deve fornecer uma animação 3D renderizada (rendering), devido aos movimentos da ferramenta, e gerar uma peça virtual usinada através da simulação
49 48 e suportar a verificação automática, comparando o modelo virtual criado pela simulação e o modelo CAD original [76]. As pesquisas na simulação e verificação geométrica de trajetórias CN podem ser divididas em métodos baseados em visualização, em sólidos e vetores discretos. Cada método tem suas vantagens e desvantagens em termos de velocidade computacional, precisão de representação e a funcionalidade de fazer inspeções numericamente. O método baseado em visualizações geralmente utiliza dispositivos gráficos como um z-buffer, que graficamente verifica os resultados de corte, para verificar a usinagem em outra vista, é necessário refazer o cálculo de simulação. Também não é numericamente simples inspecionar os resultados da usinagem. Conceitualmente, o método baseado em sólidos pode ser um excelente candidato para uma verificação bem precisa com uma inspeção numérica possível, mas ele requer uma carga computacional pesada. O método baseado em vetores ou modelo de vetores discretos (DVM-Discrete Vector Model) representa a peça sendo usinada como um conjunto de pontos e vetores direção, onde as direções são geralmente os vetores normais nos correspondentes pontos nas superfícies [77]. Os métodos z-map [78][79] ou dexel [80][81] podem ser vistos como casos especiais de DVM, onde todos os vetores direção estão apontados ao longo da direção z de um sistema de coordenadas cartesiano. b) Simulação de máquina-ferramenta Os softwares de simulação de máquinas-ferramenta usam tecnologia gráfica 3D para modelar e animar uma máquina-ferramenta no computador. O software processa entradas como código ISO (código G) e APT/CL e simula todos os movimentos dos componentes da máquina-ferramenta, incluindo, eixos, cabeçotes e ferramentas, para detectar colisões entre quaisquer componentes estáticos ou em movimento (Figura 2.21) [73][80].

50 49 Os maiores benefícios são de verificação de possíveis colisões entre todos os componentes da máquina-ferramenta, incluindo cabeçotes, eixos, paletes e mesas, de previsão das operações de usinagem, pela simulação de movimentos de todos os componentes da máquina-ferramenta, dando estimativas de tempo para as operações, o que auxilia no planejamento da produção e validação de novas configurações de pós-processadores. [80][81]. Figura 2.21: Simulação de máquina-ferramenta. c) Otimização CN Os softwares de otimização NC analisam os programas NC para ajustar as velocidades de avanço v e de corte v, e conseqüentemente os esforços que atuam no processo, f c reduzindo assim os tempos de usinagem [81]. Os softwares analisam os parâmetros de corte tais como profundidade axial de corte (a p ), profundidade radial de corte (a e ), volume de material removido (Q), área de contato da ferramenta e tamanho das ferramentas para determinar as velocidades ótimas de trabalho.
51 50 Pode-se citar os ganhos produtivos como programas CN mais eficientes e redução substancial do tempo total de usinagem, consequentemente a melhor utilização do tempo de máquina-ferramenta disponível. Um sistema CAM sempre usa a mesma velocidade de avanço para toda uma operação, consequentemente a força de usinagem não é a mesma em diferentes condições de contato da ferramenta, ou seja, a ferramenta de corte trabalha sob intensa flutuação de carga mecânica [82]. Assim, a otimização CN baseada em simulação física, em contraste com a simulação geométrica fornece melhor controle sob o processo de usinagem, especialmente a processos onde o corte é intermitente. Os parâmetros de corte, tais como, profundidade axial de corte (a p ) e profundidade axial de corte (a e ) mudam com a posição da ferramenta [83]. A otimização CN deve considerar o caminho da ferramenta (tool path) e os parâmetros de usinagem ao mesmo tempo, especialmente quando se trata de usinagem de superfícies complexas. Alguns trabalhos foram desenvolvidos no sentido de propor uma trajetória de ferramenta com uma estratégia de avanços adaptativos aos esforços encontrados numa usinagem [84][85][86] Pós-processamento para fresamento 5-eixos O fresamento de superfícies complexas com mais de 3-eixos precisa de sistemas CAD/CAM para determinação de dados de localização e orientação da ferramenta de corte. Considerando que esses dados são determinados com respeito ao sistema de coordenadas da peça WCS (Work Coodinate System), faz-se necessário a conversão desses dados para o MCS (Machine Coodinate System), sistema de coordenadas da máquina-ferramenta, através de um processo conhecido como pós-processamento CN. A grande maioria dos sistemas CAD/CAM disponibiliza ao usuário os pósprocessadores para os diversos tipos de máquinas 5-eixos. Essa tarefa pode ser efetuada
52 51 através de uma série de transformações entre os sistemas de coordenadas nos elementos da máquina, que são similares a braços de robôs [87]. Segundo SAKAMOTO e INASAKI as máquinas-ferramenta 5-eixos comerciais estão classificadas em três grupos (Figura 2.22) [88]. As máquinas tipo (a) tem o fuso com três graus de liberdade (GL) nas direções X, Y, Z e a mesa com dois graus de liberdade (GL) com relação aos eixos rotativos A e C. Esse tipo de máquina-ferramenta é conhecida como a mais econômica, devido que ela pode realizar os cinco GL só pela adição do mecanismo da mesa numa maquina-ferramenta de 3-eixos. A maior vantagem dessa máquina-ferramenta sobre as demais esta relacionada à carga suportada pelo fuso que menor que as demais, já que não é necessário que fuso gire. Entretanto, peças pesadas não se adequam a esse tipo de maquina devido ao grande torque necessário para rotacionar as mesas. As máquinas-ferramenta do tipo (b) têm o fuso com cinco GL, três de translação e dois de rotação. A maior vantagem desse tipo é que peças pesadas podem ser processadas, desde que a máquina-ferramenta não precisa orientar a peça, mas sim o fuso. As máquinas-ferramenta do tipo (c) têm o fuso com quatro GL, três de translação e um de rotação, e um GL de rotação na mesa.
![52 Figura 2.22: Classificação de máquinas-ferramenta 5-eixos [88].](/docs-images/17/98279/images/53-0.jpg "LEE e SHE [89] (1997) derivaram equações analíticas de cinemática inversa para a geração de dados NC dos modelos de SAKAMOTO e INASAKI, e SUH et al desenvolveram um programa para movimentos")
53 52 Figura 2.22: Classificação de máquinas-ferramenta 5-eixos [88]. LEE e SHE [89] (1997) derivaram equações analíticas de cinemática inversa para a geração de dados NC dos modelos de SAKAMOTO e INASAKI, e SUH et al desenvolveram um programa para movimentos simultâneos de máquinas-ferramenta 5-eixos[88][90]. KRUTH e KELWAIS desenvolveram um programa que simulava o código NC gerado via pós-processamento e modificava os dados CL (Cutter Location) [91]. A aplicação de mecanismos paralelos como essência da construção de uma máquinaferramenta é o novo conceito no projeto de centros de usinagem multi-eixos. O projeto original de uma máquina-ferramenta de cinemática paralela surgiu da plataforma de STEWART [92]. A plataforma de Stewart foi projetada para ser um simulador de vôo e foi largamente aceita na indústria.
54 53 Comparando as máquinas-ferramentas seriais convencionais com uma máquinaferramenta de articulações paralelas, esta tem muitos vantagens, tais como, forças de corte superiores que podem ser aplicadas nesse tipo de máquina-ferramenta. Sistemas mais rígidos e estáveis são geralmente obtidos com o uso de mecanismos de cadeia fechada. Maior precisão pode ser obtida, já que os erros de posição em cada eixo de movimentação não são acumulados. O custo pode ser reduzido e maiores velocidades de avanço com maiores acelerações podem ser obtidas [93][94]. A indústria tem dado bastante atenção ao desenvolvimento de máquinas-ferramenta de cinemática paralela. Elas são consideradas como sendo uma das principais tendências no desenvolvimento de máquinas-ferramenta. Entretanto, a aplicação real de mecanismos de cinemática paralela em máquinas-ferramenta ainda não foram provados em termos de otimização de eficácia sobre as máquinas-ferramenta tradicionais. Muitas desafios têm ainda que ser superados e explorados. O pós-processamento é uma dos tópicos essenciais que devem ser investigados antes que esses mecanismos possam ser usados em máquinasferramenta [95]. 2.2 Influências sob o fresamento 5-eixos As variáveis envolvidas na cadeia CAD/CAM/CNC serão tema desse sub-capítulo com o objetivo de fornecer informações a respeito das especificidades da cadeia para fresamento 5- eixos. Muitas das características do fresamento 3-eixos podem ser consideradas para o fresamento 5-eixos, como por exemplo: ferramentas de corte para fresamento 3-eixos são perfeitamente aplicáveis no fresamento 5-eixos. Entretanto, algumas características são especificas do fresamento 5-eixos. A definição de todas essas características e o relacionamento entre elas é ilustrada na Figura 2.23.
55 54 Figura 2.23: Influências sobre o fresamento 5-eixos. A precisão de um modelo fresado está relacionada às condições de usinagem, envolvendo deflexões da ferramenta de corte, vibrações durante o processo de usinagem e desvios de trajetória causados pela inércia de movimentação dos eixos, agravando-se quando se com trabalha com altas acelerações e velocidades de avanço [96] Características de uma máquina ferramenta 5-eixos. As especificações de projeto para uma máquina-ferramenta segundo BOHEZ podem ser definidas dos seguintes princípios [97]: A cinemática deve fornecer flexibilidade suficiente em orientação e posicionamento da ferramenta e da peça. Orientação e posicionamento com a maior velocidade e precisão possível; Rápida troca de peças e ferramentas; Segurança para o ambiente e operador;
 ou o número de movimentos independentes controlados nos barramentos da máquina.")
56 55 A maior taxa possível de remoção de material. O número de eixos de uma máquina-ferramenta normalmente se refere ao número de graus de liberdade (GL) ou o número de movimentos independentes controlados nos barramentos da máquina. A nomenclatura ISO usa um sistema de coordenadas da mão direita, com o eixo da ferramenta correspondendo ao eixo Z [97]. Uma fresadora 3-eixos tem 3 barramentos lineares X, Y e Z que fazem o posicionamento ao longo dos eixos, contanto que não se ultrapasse o limite de cada eixo. O eixo da ferramenta fica fixo durante a usinagem (Figura 2.24-a), o que limita a flexibilidade da orientação da ferramenta, relativa à peça, resultando, num número grande nº de fixações para geometrias complexas. Para aumentar a flexibilidade da orientação entre a ferramenta e a peça, sem a necessidade de mudança de fixação, mais graus de liberdade devem ser adicionados. Para uma máquina-ferramenta convencional isso pode ser alcançado adicionando-se eixos rotativos, diferentemente dos já usuais eixos de translação (Figura 2.24-b) [98]. Figura 2.24: a) Máquina-ferramenta 3-eixos XYZ no fuso. b) Máquina-ferramenta 5-eixos XYZ no fuso e AC na mesa [98]. Quando os eixos rotativos adicionados são paralelos aos eixos de translação a seguinte nomenclatura é adotada: eixo rotativo paralelo ao eixo de translação X chama-se eixo A, eixo
![56 rotativo paralelo ao eixo de translação Y chama-se eixo B e, finalmente, eixo rotativo paralelo ao eixo de translação Z chama-se eixo C [97].](/docs-images/17/98279/images/57-0.jpg "Para orientar dois corpos rígidos um em relação ao outro são necessários 6 GL (graus de liberdade) para cada corpo (ferramenta e peça), ou seja, 12 GL.")
57 56 rotativo paralelo ao eixo de translação Y chama-se eixo B e, finalmente, eixo rotativo paralelo ao eixo de translação Z chama-se eixo C [97]. Para orientar dois corpos rígidos um em relação ao outro são necessários 6 GL (graus de liberdade) para cada corpo (ferramenta e peça), ou seja, 12 GL. Contudo, nenhuma translação ou rotação que mude a orientação relativa é permitida, reduzindo os GL a 6. A distância entre os corpos é prevista pela trajetória da ferramenta eliminando mais um GL, reduzindo os GL a um mínimo de 5 GL [97]. O movimento de uma ferramenta de corte durante o fresamento 5-eixos de superfícies complexas (free form surfaces) gera um volume complexo no espaço (swept volume) (Figura 2.25). Figura 2.25: Exemplo de volume gerado pelo movimento da ferramenta no fresamento 5- eixos simultâneos (swept volume). Entretanto, na maioria dos sistemas CAM o erro ao longo da trajetória da ferramenta é aproximado por um desvio cordal 2D (Figura 2.26), que é a distancia entre a trajetória da ferramenta necessária para gerar o perfil pretendido na programação e a reta (corda) que liga dois pontos consecutivos de interpolação da trajetória programada e pós-processada. Para
58 tanto, se assume que a trajetória entre dois pontos interpolados é um arco (em substituição a pequena parte do perfil entre esses dois pontos) [99]. 57 Figura 2.26: Aproximação 2D da trajetória 3D da ferramenta de corte. Indiretamente, define-se a distancia entre dois pontos que serão interpolados a partir do máximo desvio entre a linha (corda) e o arco assumido (Figura 2.26). Dessa forma, os efeitos relacionados à orientação da ferramenta de corte não são levados em conta no cálculo dos desvios de um perfil que se quer usinar em 5-eixos. Portanto, faz-se necessário examinar a trajetória da ferramenta e verificar possíveis erros relacionados à mudança de orientação da ferramenta de corte numa determinada máquina-ferramenta [99]. Devido a isso, alguns comandos numéricos disponibilizam algoritmos especiais para a orientação da ferramenta utilizando curvas NURBS 3D [100]. Os comandos numéricos são adaptativos e consistem de um sistema que integra no controle as funções normais do comando numérico, a função de correção de uma série de variáveis medidas continuamente. Estes comandos são dotados de servomecanismo, que, além
59 58 de controlar uma função especifica, fazem a medição, comparando-a com o modelo ideal e corrigindo-á, se necessário [6]. Os comandos numéricos computadorizados são caracterizados por acessarem diretamente as redes de comunicação da empresa transferindo para os meios de fabricação uma variedade de dados. Esses comandos atuais têm capacidade de controlar simultaneamente até 31 eixos, sendo eles eixos de avanço lineares ou rotativos e eixos árvore (Spindle) [97]. Além disso, conjunto de funções disponíveis nos comandos ainda nas versões padrão é muito ampla e vem melhorando com o passar dos anos nos comandos modernos, tais como, LOOK AHEAD, Algoritmo NURBS de interpolação, Interpolação polinomial, Compensação térmica, etc. [100]. LOOK-AHEAD pode ser encarado como uma memória temporária (buffer) de informações adicionado à malha de controle CN. Essa característica proporciona ao sistema leitura antecipada de vários blocos de dados CN antes que sejam executados, Assim ordenasse a seqüência de movimentos antecipadamente e o tempo de transição entre blocos é minimizado. Existem as funções que fazem com que sejam ativadas rotinas que permitem que o programa CN seja independente dos eixos físicos da máquina-ferramenta. Essas funções estabelecem um novo sistema de coordenadas a partir da translação ou rotação de um sistema de coordenadas existentes. Pode-se citar TRANS, ROT, ATRANS e AROT no CNC SINUMERIK 840D da empresa SIEMENS, ou CYCLE DEF 19.1 no CNC TNC da empresa HEIDENHAIN. Além disso, algumas funções permitem programação num sistema de coordenadas virtual criado durante as operações de fresamento, tais como TRAORI no CNC SINUMERIK e M128 no CNC HEIDENHAIN. A função TRAORI é usada para calcular pontos intermediários na interpolação da orientação da ferramenta com a intenção de minimizar o
60 59 erro cordal, que é resultado da linerarização entre dois pontos interpolados numa usinagem 5- eixos. Isso é feito calculando se a compensação da ferramenta que é a distancia entre base do suporte até a ponta da ferramenta. O tempo de processamento de bloco (TPB) também é uma característica importante a se considerar no fresamento 5 eixos. Ele é o tempo médio necessário para o controle numérico processar e enviar informações de comando para o acionamento dos servo-motores, e é uma característica do CNC [101]. O TPB do comando numérico deve ser menor que o tempo necessário para a ferramenta percorrer o menor incremento de trajetória descrito por um bloco de comando [101] Fixação da peça A fixação de peças contribui de uma forma importante para a segurança e a qualidade do processo de fabricação. A precisão e a repetibilidade de uma peça estão relacionadas ao sistema de fixação, tais como, morsas, grampos, etc.[102]. O projeto de dispositivos de fixação é uma importante operação que deve ser considerada no planejamento de processos de fabricação. Um dispositivo de fixação é um único componente ou a combinação de componentes para referenciar, prender e suportar uma peça [103]. Existem vários tipos de dispositivos de fixação, mas de acordo com a forma da peça e aplicação elas podem ser classificadas em quatro categorias: placas modulares, placas modulares, morsas e placas para tornos [104]. Tipicamente utilizada em máquinas-ferramenta verticais, uma placa de fixação tem uma superfície de referência que é paralela à superfície de montagem. Placas modulares inclinadas têm a superfície de referência perpendicular à superfície de montagem na máquinaferramenta. São utilizadas normalmente em máquinas-ferramenta horizontais.
61 60 Uma morsa tem um mordente fixo e outro móvel para fixar as peças, podendo ser empregada tanto em máquinas-ferramenta horizontais quanto em máquinas-ferramenta verticais. Apesar do fácil uso, as morsas têm restrições de tamanhos [103]. Um sistema de manufatura flexível (FMS - Flexible Manufacturing System) é um sistema de produção que consiste de um conjunto de máquina numericamente controladas, idênticas ou complementares, que são conectadas através de um sistema de transporte dos componentes automatizado (esteiras, pontes rolantes, robôs, etc.) [105]. Considerando um sistema de manufatura em linha, ou seja, uma peça é abastecida na linha e sai acabada após uma determinada seqüência de processos, se por um acaso toda essa seqüência for realizada numa única máquina-ferramenta, come é o caso de uma linha transfer, qualquer percalço de fabricação, tal como, um problema na máquina-ferramenta, numa ferramenta de corte, etc., será responsável por uma parada de produção [106]. A grande desvantagem do aumento da flexibilidade para a usinagem reside na diminuição inerente da rigidez de processo. É simples pensar que num sistema transfer convencional, o tipo de peça fabricada terá um sistema de fixação de peça e de ferramenta de corte dedicado para cada operação de usinagem, enquanto que no caso de sistemas flexíveis, o sistema de fixação, por exemplo, deixará de estar dedicado e passará a ser passível de uso para tamanhos de peças distintas [106]. A geometria de uma peça representa um das principais considerações na seleção do tipo de dispositivo de fixação a ser usado. A existência de certas características geométricas, tais como, superfícies paralelas e furos de referência têm um efeito significante na decisão sobre qual estratégia de fixação será adotada [103]. Uma importante atividade do CAPP (Computer-Aided Process Planing) no que se refere a usinagem é determinar os esquemas de fixação para cada operação [103].
 [100].")
62 61 O fresamento de posicionamento ou fresamento 3+2 é uma alternativa quando se têm várias fixações em uma mesma peça. Usualmente trabalha-se com a ferramenta inclinada com relação às superfícies de trabalho (Figura 2.27) [100]. Nesse tipo de fresamento os eixos rotativos da máquina-ferramenta são utilizados somente para a orientação da ferramenta relativa à peça de forma a se ter melhor acesso à regiões da peça e melhores condições de corte. Essa forma de trabalho permite ferramentas mais curtas, além eliminar fixações redundantes, portanto é reduzido o número de fixações [107]. Figura 2.27:Inclinação do cabeçote no fresamento de estampo [100] Condições de contato da ferramenta A seguir serão analisadas as condições de contato do topo da ferramenta de corte com o material da peça, bem como as influências das grandezas geométricas de cada ferramenta e dos parâmetros de corte em relação à vida da ferramenta, ao acabamento superficial e ao desvio de forma.
63 62 Objetiva-se fundamentar os conhecimentos do processo de fresamento para uma determinação operação de acabamento com fresa de topo e, desse modo, estabelecer uma relação entre o raio da ferramenta, a curvatura da superfície usinada e os parâmetros de usinagem, para otimização da qualidade superficial e diminuição do erro dimensional. Segundo o Machinability Data Center (1980) a usinagem de um material, no início do corte, o gume (ferramenta) penetra no material da peça, e este se deforma elástica e plasticamente. Após ultrapassar a tensão máxima de cisalhamento do material, este começa a escoar. Em dependência da geometria da cunha de corte, o material deformado passa a formar um cavaco que desliza sobre a face [108]. Em todos os processos de usinagem, as características do processo, como formação e saída de cavaco, força de corte, desgaste e acabamento da superfície usinada, são influenciadas consideravelmente pela geometria da ferramenta. Em decorrência disso, a geometria da ferramenta deve ser adaptada ao material da peça, ao material da ferramenta e as condições específicas da máquina-ferramenta [109]. No acabamento, a seleção dos parâmetros de corte, das condições de contato e do diâmetro da ferramenta deve alcançar a qualidade superficial e de forma requeridas pelo projeto [110]. As superfícies acabadas dos componentes de turbinas a gás, especialmente superfícies complexas (free form surfaces), tais como impelidores, superfícies cônicas e esféricas, são acabadas com ferramentas de topos arredondados. Essas geometrias de topo das ferramentas produzem superfícies onduladas, que são diretamente dependentes das condições de contato adotadas [111][47][49]. Em ZANDER (1995) e WARKETIN et. al. (1994) apresentaram técnicas em 5 eixos para a usinagem de superfícies complexas com fresas de topo toroidal, reduzindo a altura das cristas produzidas pelo processo[110].
64 63 No fresamento em 3 eixos, as linhas de fresamento acompanham o contorno da peça. A ferramenta de corte estabelece um movimento com diferentes condições de engajamento e com linhas de fresamento paralelas até a obtenção da medida desejada, o que significa uma modificação constante dos esforços de corte sobre a ferramenta [110]. No fresamento em 5 eixos, a ferramenta de corte estabelece uma condição de contato, consequentemente mantém também constante o esforço que atua sobre a ferramenta. Além disso, existe a possibilidade de se trabalhar com ferramentas com a relação L/D (altura da ferramenta/diâmetro da ferramenta) menor [107]. Essa relação geométrica é conhecida como índice de esbeltez de elemento estrutural (ferramenta de corte). Esta relação representa a medida da flexibilidade de um elemento estrutural [112]. Para se avaliar o erro de forma no fresamento é necessário estudar o desvio da haste da ferramenta. Este desvio é modelado considerando a ferramenta de corte engastada no fuso (Figura 2.28) [110]. d(x) x Figura 2.28: Ferramenta de corte admitida como uma viga engastada. A ferramenta também se desloca por vibração da haste. As possíveis causas de vibração são as condições da máquina-ferramenta, a forma da peça, a fixação da peça na máquinaferramenta, a fixação da ferramenta no porta ferramenta e a afiação da ferramenta de corte [113].

65 64 A Figura 2.29 mostra um modelo simplificado de uma ferramenta de corte em elementos finitos exemplificando os quatro primeiros modos de vibração para uma ferramenta de corte sob restrições de engastamento no porta ferramenta. Para o primeiro modo de vibração a ferramenta se desloca no plano XZ, o segundo modo a ferramenta se desloca no plano YZ de forma semelhante ao primeiro modo de vibração, o terceiro modo a ferramenta se desloca no plano XZ e o quarto modo a ferramenta se desloca no plano YZ de forma semelhante ao 3º modo de vibração. Figura 2.29: Ferramenta de corte e seus modos de vibração. Segundo ZANDER (1995) a influência da geometria de uma ferramenta de corte sobre a qualidade superficial na direção transversal ao avanço, pode-se demonstrar pela variação da rugosidade teórica (Rth) (Figura 2.30) [110].
![65 Figura 2.30: Rugosidade teórica (R th ) na direção transversal ao avanço [110].](/docs-images/17/98279/images/66-0.jpg "Ainda, segundo ZANDER (1995) com o aumento da profundidade de corte radial (a e ) e do ângulo de inclinação entre a haste e a normal da superfície (β), as fresas de topo toroidal e reto apresentam um")
66 65 Figura 2.30: Rugosidade teórica (R th ) na direção transversal ao avanço [110]. Ainda, segundo ZANDER (1995) com o aumento da profundidade de corte radial (a e ) e do ângulo de inclinação entre a haste e a normal da superfície (β), as fresas de topo toroidal e reto apresentam um comportamento semelhante em relação ao aumento da rugosidade teórica (R th ). O mesmo resultado não ocorre para a fresa de topo esférico [110]. Devido à característica geométrica do topo esférico da fresa, o ângulo de inclinação entre a haste e a normal da superfície (β) não influencia na rugosidade teórica (R th ). Todavia, a influência da profundidade de corte radial (a e ) é muito maior, comparada às fresas de topo reto e toroidal [110][114]. Pode-se também demonstrar a influência da geometria das ferramentas de corte sobre a qualidade superficial, na direção longitudinal ao avanço, em função da rugosidade teórica (R th ) (Figura 2.31) [110].
![66 Figura 2.31: Rugosidade teórica (R th ) na direção longitudinal ao avanço [107]. As geometrias circulares dos gumes das fresas de topo esférico e toroidal provocam um perfil em formato de ondas.](/docs-images/17/98279/images/67-0.jpg "Este perfil não sofre influência do ângulo de inclinação entre a haste e a normal da superfície (β) [110].")
 é menos sensível, devido ao elevado valor do raio de quina r ε [110].")
67 66 Figura 2.31: Rugosidade teórica (R th ) na direção longitudinal ao avanço [107]. As geometrias circulares dos gumes das fresas de topo esférico e toroidal provocam um perfil em formato de ondas. Este perfil não sofre influência do ângulo de inclinação entre a haste e a normal da superfície (β) [110]. Para todos os tipos de topo de ferramentas, na direção longitudinal ao avanço, a rugosidade teórica (R th ) aumenta proporcionalmente ao avanço por dente (f z ). Entretanto, para ferramentas de topo esférico e toroidal, a influência do avanço por dente (f z ) é menos sensível, devido ao elevado valor do raio de quina r ε [110]. Para fresas de topo reto, com o ângulo de inclinação entre a haste e a normal da superfície (β), produz-se um perfil em formato de dente de serra. O máximo valor de rugosidade teórica (R th ) é obtido para β=45. Com a variação do avanço por dente (f z ), estabelece-se uma relação linear com a rugosidade teórica (R th ) [110].
 exerce uma influência significativa na formação da altura das cristas.")
68 67 Desse modo, devido à independência do ângulo de inclinação entre a haste e a normal da superfície (β) e da pequena relação com o avanço por dente (f z ), as ferramentas de topo esférico são mais adequadas para o acabamento em três eixos de superfícies complexas. A profundidade de corte radial (a e ) exerce uma influência significativa na formação da altura das cristas. Entretanto, em operações com altas velocidades de corte (HSC) é possível o emprego de pequenas profundidades de corte radiais (a e ), com altas velocidades de avanço, sem prejuízo do tempo de fabricação [110] [114]. Segundo GOMES (2001), a influência do ângulo de inclinação entre a superfície e a ferramenta, para ferramentas de topo esféricas, sobre rugosidade real é pequena. Entretanto, a rugosidade real é prejudicada para ângulos de inclinação menores do que 15º, pois a remoção de cavaco da região de corte é difícil e velocidade de corte na região tende a zero, provocando esmagamento de material na zona de corte e para ângulos maiores do que 75º, devido à elevada deflexão da haste da ferramenta [110]. Figura 2.32: Comportamento da rugosidade real [110](GOMES, 2001). A Tabela 2.2 mostra o corte discordante e concordante. No corte discordante, a espessura do cavaco é inicialmente é zero e aumenta na direção de revolução da ferramenta até uma espessura máxima. Nesse caso, a direção de revolução da ferramenta e a direção de
69 68 avanço da ferramenta são as mesmas, no caso de uma máquina-ferramenta sem movimentação de translação na mesa (Tabela 2.2). Tabela 2.2: Características do corte discordante e concordante [113]. Tipo de corte Corte discordante Corte concordante Item Forma do corte Vida da ferramenta Curta Longa Rigidez da O corte discordante é indicado A maquina ferramenta deve ter máquinaferramenta antigas e já com para máquinas-ferramenta alta rigidez e não ter folgas. folgas. Acabamento Superficial Teórico Real Forma de cavaco Esforços de corte 2 f z Rth = D f z z π Superior comparado ao fresamento concordante Excelente na usinagem com fluido de corte e maquina ferramenta com pouca rigidez e folgas Cavaco é difícil de enrolar. Adesão de cavaco ocorre facilmente Grande força de avanço, pequena força passiva pequena e força de corte relativamente grande. 2 f z Rth = D f z z 8 8 π Inferior comparado ao fresamento discordante Excelente em usinagem sem fluido refrigerante e quando a maquina tem boa rigidez e não tem folgas Cavacos enrolam e são quebrados em pequenos pedaços Pequena força de avanço, grande força passiva e força de corte relativamente pequena. No corte concordante, a espessura do cavaco é inicialmente a máxima espessura de cavaco e decresce na direção de revolução da ferramenta. Nessa situação, a direção de corte e a direção de avanço da ferramenta são contrárias, no caso de uma máquina-ferramenta sem movimentação de translação na mesa [113].

, a curvatura")
70 69 Figura 2.33: Características geométricas no fresamento 5-eixos. As características de contato num ponto qualquer para fresas de topo esférico são regidas pelas variáveis mostradas na Figura Elas são a quantidade de sobremetal, a profundidade de corte radial (a e ), a curvatura da superfície e a inclinação da ferramenta relativa à superfície fresada.
71 70 3 Materiais e métodos As etapas experimentais deste trabalho, descritas a seguir, foram realizadas no laboratório CCM (Centro de Competência em Manufatura) da Divisão de Engenharia Mecânica-Aeronáutica do ITA (Instituto Tecnológico de Aeronáutica). Nas subseções seguintes, primeiro é descrito o que foi utilizado nos experimento e por fim os métodos utilizados nos experimentos. 3.1 Materiais de ensaio Para componentes utilizados em turbinas a gás existe uma variedade de materiais a serem considerados, em virtude dos diferentes níveis de solicitação mecânica e térmica. Os materiais podem ser desde uma simples liga de alumínio até ligas especiais de níquel utilizadas em situações, onde os componentes são submetidos a altos níveis de tensão e temperatura. Tabela 3.1: Liga de alumínio da classe 7000 propriedades mecânicas e composição química[115]. Propriedades Mecânicas Especificação AA 7475-T61 Dureza Brinell (HB) 148 HB Tensão de Ruptura (σu) 565 MPa Tensão de Escoamento (σu) 490 MPa Modulo de Elasticidade (E) 70,3 GPa Coeficiente de Poisson (ν) 0,33 Modulo de Cisalhamento (G) 27 GPa Densidade (ρ) 2,81 g/cc Composição Química em Percentual Al 88,5-91,5% Ti 0,06% Cr 0,18-0,25% Zn 5,2-6,2% Cu 1,2-1,9% Fe Máx. 0,12% Mg 0,06% Mn 0,1% Fonte:ASM, 1990 e HOLT, 1996.

72 71 A Tabela 3.1mostra algumas propriedades mecânicas e a composição química da liga de alumínio utilizada nos testes. Devido à relativa facilidade de obtenção e aos objetivos do trabalho não estarem relacionados à usinabilidade de um material em especifico a liga de alumínio AA 7475-T6 foi escolhida. 3.2 Máquina-ferramenta Utilizou-se como máquina-ferramenta para os ensaios, um centro de usinagem HSC 5- eixos Hermle C600U. A Figura 3.1 mostra a maquina-ferramenta utilizada nos ensaios desse trabalho. Figura 3.1: Máquina-ferramenta utilizada nos ensaios. As especificações da máquina-ferramenta são as seguintes: Eixos: X (606 mm) Y (450 mm) Z (450 mm) A (-110º< α<110º) C (0º<θ<360º);
: 35000 mm/min; Máximo avanço programável (G1): 9200 mm/min 3.3 Ferramentas de corte Utilizou-se para os ensaios ferramentas inteiriças de metal duro.")
73 72 Rotação Máxima: rpm; Potencia: 15kW em 40% de ED (40% do tempo de funcionamento da máquinaferramenta pode-se trabalhar utilizando a máxima potencia e rotação); Comando Numérico: SIEMENS, SINUMERIK 840D; Avanço rápido (G0): mm/min; Máximo avanço programável (G1): 9200 mm/min 3.3 Ferramentas de corte Utilizou-se para os ensaios ferramentas inteiriças de metal duro. Estas ferramentas foram montadas em suporte CoroGrip HSK 63. Tanto as ferramentas quanto os suportes são do fabricante SANDVIK. As ferramentas utilizadas são especificadas na Tabela 3.2. Tabela 3.2: Ferramentas utilizadas na fabricação do componente (116). Operação Desbaste Acabamento Código do fabricante R EAI16G R AK22G Classe de metal duro Tipo de Fresa Topo Reto Topo Esférico Número de facas 4 2 Diâmetro Dc (mm) Ângulo de hélice 30º 30º Raio de canto rε (mm) 2 6 Tipo de haste Cilíndrica Cilíndrica Comprimento da haste l2(mm) Ângulo de Saída 3º 10º30 Ângulo de incidência 9º 12º ap máx (mm) 16 22
 [117]. Para programação CAM foi utilizado o módulo NX CAM.")
74 Software CAD/CAM Para programação das estratégias estudadas, bem como de todo o estudo das geometrias geradas para o fresamento utilizou-se a plataforma UG NX3 da empresa UGS Corp. Para modelagem e avaliação das geometrias foram utilizados os módulos de modelagem de superfícies e sólidos (Modeling e Shape Studio) [117]. Para programação CAM foi utilizado o módulo NX CAM. Finalmente, para criação de modelo para simulação da máquinaferramenta estudada foram utilizados os módulos ISV (Integrated Simulation and Verification) [118] do mesmo pacote NX3 e o software PostBuilder. A Figura 3.2 ilustra os módulos utilizados no trabalho. Figura 3.2: Módulos do UG NX3, Modeling, Manufacturing IS&V e PostBuilder.
 com as seguintes características: Fabricante: Mitutoyo Corportation; Modelo: SJ-201p; Método de detecção: Indutância diferencial; Faixa de")


75 Equipamentos auxiliares As medições de rugosidade foram realizadas utilizando um rugosímetro de ferramentaria (Figura 3.3) com as seguintes características: Fabricante: Mitutoyo Corportation; Modelo: SJ-201p; Método de detecção: Indutância diferencial; Faixa de medição: 350 µm (-200µm a 150µm); Material do apalpador: Diamante; Raio da ponta do apalpador: 5µm; Força de medição: 4mN. Figura 3.3: Rugosímetro utilizado nas medições de rugosidade das superfícies. A fim de coletar pontos nas superfícies estudadas, a peça foi medida num sistema de inspeção para coleta desses pontos e compara-los ao modelo CAD existente. Esse sistema utiliza um braço articulado com 6 graus de liberdade e apalpador (probe) de natureza mecânica com as seguintes especificações: Fabricante: CIMCORE Modelo: 3000i Series Comprimento do Braço: 1,8m Volume de trabalho: 3m 3



76 75 Peso: 5,4 kg Configuração dos eixos: 6 eixos (2-2-2) Precisão: 0,005mm A Figura 3.4 mostra o braço sendo utilizado para coleta de pontos na atividade de medição do componente estudado. Figura 3.4: Equipamento utilizado para medição de peça. 3.6 Método utilizado nos ensaios A seguir, é mostrado o método utilizado neste trabalho para a utilização das tecnologias CAD/CAM/CNC de forma a se ter um uso otimizado das tecnologias envolvidas, principalmente no que se refere ao fresamento 5-eixos de componentes de turbinas a gás. A seqüência de atividades desenvolvidas procura reproduzir o que de fato acontece na cadeia

77 76 CAD/CAM/CNC para fresamento 5-eixos. Fazendo com que o método adotado não tenha apenas um embasamento teórico, mas também prático e perfeitamente aplicável como estratégia produtiva na indústria. Para tanto, procurou-se percorrer a cadeia CAD/CAM/CNC seguindo a seqüência das atividades mostradas na Figura 3.5. INPUT Figura 3.5: Método aplicado aos ensaios. O método mostrado na Figura 3.5 propõe que a partir de uma geometria CAD e dados de projeto de um componente que se quer fabricar com fresamento 5-eixos sejam
78 77 desenvolvidas tarefas que garantiram o sucesso da fabricação. Essas tarefas são elucidadas a seguir: Análise das geometrias A análise das geometrias com ferramentas computacionais é a etapa que garantirá a consistência do modelo matemático que será utilizado nas etapas posteriores do desenvolvimento do produto (componentes de turbinas a gás) como exemplo a programação de máquinas-ferramenta com auxilio de software CAM. Essas análises são a verificações da curvatura gaussiana e as curvas isoparamétricas das superfícies. Busca-se nessa etapa avaliar descontinuidades geométricas, parametrização das superfícies e os procedimentos utilizados para a construção do modelo. Remodelagem de geometrias Feita a análise geométrica das superfícies é possível se ter informações que são úteis para prevenção de possíveis problemas na geração de trajetórias de ferramenta em 5-eixos simultâneos. Quando problemas são detectados é feita uma operação de remodelagem do próprio componente ou a modelagem de geometrias auxiliares com o objetivo de auxiliar a programação CAM do componente que se quer fabricar. Programação CAM Agora com os problemas que seriam encontrados na geometria CAD já solucionados nas etapas posteriores (Análise das geometrias e Remodelagem), parti-se para programação CAM do componente através da escolha das ferramentas, das estratégias e dos parâmetros de corte que serão utilizadas para o fabrico do componente. Simulação 5-eixos A simulação das estratégias programadas em software CAM é outra tarefa que previne problemas em etapas posteriores da cadeia CAD/CAM/CNC. Dessa vez problemas que aconteceriam em processo como colisões entre os componentes da máquina-ferramenta, ou
79 78 mesmo problemas com pós-processamento são antecipados evitando re-trabalho do programador. Este muitas vezes não tem a correta noção dos movimentos desenvolvidos pela máquina-ferramenta a partir da sua programação após a etapa de pós-processamento. Com isso aumenta-se o risco de colisão ou mesmo de um processo insatisfatório. Para atender a necessidade aqui levantada um simulador foi desenvolvido e é utilizado para evitar colisões durante a fabricação de componentes. Escolha da interpolação A escolha da uma interpolação para processo de fresamento 5-eixos tem a justificativa de otimizar o tempo de fabricação, tornar os movimentos dos eixos mais suaves e por fim melhorar o acabamento superficial. Para tanto, um perfeito entendimento de qual interpolação se deve usar é requerido. Para tanto, alguns ensaios foram feitos de forma adquirir dados para analise e posterior escolha correta da interpolação utilizada para o processo. Pós-processamento NC Afastada a possibilidade de colisão durante o processo de fabricação, segue-se para o pós-processamento das operações CAM criadas. O pós-processamento consiste em escrever numa linguagem que o comando numérico possa interpretar e executar as trajetórias criadas com os parâmetros de corte utilizados no software CAM utilizado. Fabricação do modelo A fabricação consiste em executar os programas criados através do pós-processamento das trajetórias. Para tanto é necessário dispositivo de fixação para fixar a peça mesa da máquina-ferramenta. Também é necessário o preset da peça e das ferramentas que serão utilizadas durante o processo de fabricação. Medição do componente (comparador)

80 79 Por fim o modelo CAD e as especificações de projeto são equiparados ao resultado do processo de fabricação de forma a se verificar se o componente atende aos seus requisitos funcionais definidos posteriormente Procedimento para análise de geometrias (IGES, PARASOLID) A escolha da geometria utilizada, encontradas em turbina a gás, levou em conta a complexidade geométrica e suas respectivas necessidades de utilização do fresamento em 5- eixos. No estudo levou-se em conta a complexidade geométrica dos componentes de turbinas a gás, e suas respectivas necessidades de utilização do fresamento em 5-eixos simultâneos para a obtenção de forma e da qualidade da superfície usinada. Para tanto, um impelidor de compressor radial foi escolhido como geometria teste (Figura 3.6). Figura 3.6: Impelidor de turbina a gás escolhido para o estudo.
81 80 O modelo CAD, cedido pela Divisão de Física do ITA (Figura 3.7), foi modificado de forma a ter as dimensões para teste na máquina-ferramenta de estudo e manuseio para medições das características das superfícies fabricadas. Como o modelo foi feito em software CAD diferente do software que serviu como ferramenta para esse trabalho, necessitou-se de uma etapa de exportação de modelo entre softwares CAD/CAM. Os tipos de arquivos escolhidos foram os clássicos IGES e PARASOLID, ou seja, foram escolhidos formatos de arquivos que utilizam superfícies e sólidos como base para construção do modelo. O modelo é mostrado na Figura 3.7, também é mostrada na figura a nomenclatura das superfícies do componente. Figura 3.7: Modelo do impelidor escolhido para os testes.

82 81 Nessa etapa do trabalho, procurou-se avaliar a influência do procedimento de modelagem exercida sobre o algoritmo para a reparametrização de superfícies cortadas (trimmed surfaces). Para tanto, foi feita uma análise do procedimento de modelagem utilizado para criação do modelo estudado. Buscou se também verificar a influência que os formatos de arquivos IGES e PARASOLID exercem na geração de trajetórias de ferramenta. Além disso, foi utilizada a ferramenta de análise de superfícies curvatura gaussiana com a intenção de verificar possíveis descontinuidades superficiais. Para relacionar um possível erro na geração de trajetória ao procedimento de modelagem (trimming) e não ao processo de exportação das geometrias, foram modeladas superfícies suaves com três diferentes graus de complexidade de borda (Figura 3.8). Essa complexidade foi definida por operação de corte (trimming). Figura 3.8: Superfícies utilizadas para avaliação de geração de trajetória.
83 82 Para cada superfície foram geradas trajetórias de ferramenta em 5-eixos utilizando os parâmetros de geração de trajetória mostrados na Tabela 3.3. Tabela 3.3: parâmetros utilizados para geração das trajetórias. β (tilt angle) α (lead angle) 15º 15º 45º 45º O ângulo α é aquele com relação à normal à superfície e no sentido transversal a direção de avanço da ferramenta de corte e β é o angulo com relação à normal à superfície e no sentido de avanço da ferramenta de corte (Figura 3.9). + β β + α α Figura 3.9: Inclinação da ferramenta de com relação a normal a superfície.

84 Procedimento para remodelagem para fresamento 5-eixos A partir da análise gaussiana das superfícies realizou-se a remodelagem de detalhes que não foram observados durante a etapa inicial de modelagem CAD, por outro projetista, cuja a modelagem não estava direcionada a fabricação do componente. A Figura 3.10 ilustrar uma deficiência encontrada no modelo. Nela pode-se ver uma descontinuidade superficial na superfície do cubo (hub surface). Essa descontinuidade é prejudicial a orientação da ferramenta de corte no fresamento 5-eixos simultâneos. Figura 3.10: Analise Gaussiana (Curvatura Gaussiana) em superfícies. O uso de curvas que sejam continuas é de fundamental importância quando se está construindo superfícies ou sólidos. Mudanças abruptas de curvatura, como as mostradas na Figura 3.10, ocasionam movimentos bruscos no processo de fresamento 5-eixos, comprometendo a estabilidade do processo. Deve-se então corrigir o modelo para que essa hipótese seja afastada.
85 84 As descontinuidades verificadas na análise gaussiana se deviam ao uso de arcos e retas como geratrizes do sólido analisado. A solução proposta é a substituição desses arcos e retas por curvas complexas do tipo NURBS Procedimento programação CAM de componentes A partir de uma geometria bem definida buscou-se escolher as ferramentas para o processo de fresamento. Essas ferramentas são definidas no software CAM de forma a serem usadas para calcular as trajetórias de ferramentas para a fabricação do componente. As ferramentas escolhidas são mostradas na subseção 3.3. Inicialmente, programou-se o desbaste do componente, cada espaço entre as pás foi tratado como se fosse uma cavidade. A estratégia escolhida para usinagem da cavidade foi a seguinte: Desbaste utilizando a estratégia Z-level (Z constante), os níveis estavam espaçados de 1mm (a p ). Entrada da ferramenta no centro da cavidade em hélice com 15º de rampa. Fazendo com que a profundidade de corte radial seja aproximadamente constante. Assim evita-se que a ferramenta faça primeiro o contorno externo, que aconteceria com todo o diâmetro da ferramenta imerso na peça. Sabe-se que essa estratégia é comumente utilizada para desbaste de cavidades e que apresenta bons resultados. Na Figura 3.11 é mostrada a estratégia de corte utilizada para a cavidade em questão.

86 85 Figura 3.11: Desbaste da geometria. As demais cavidades forma desbastadas seguindo a mesma estratégia. A mesa C girou a peça em 36º e foi executada a mesma estratégia o que caracteriza fresamento 5-eixos de posicionamento ou fresamento 3+2. E assim, sucessivamente até serem desbastadas todas as pás do componente. Para as etapas de acabamento do componente teste foi estabelecida uma matriz de ensaios com os seguintes parâmetros de corte: profundidade axial de corte (a p ), profundidade radial de corte (a e ) e avanço por faca (f z ). A tabela é mostrada na Tabela 3.4. A velocidade de corte v c recomendada pelo fabricante da ferramenta de corte era 1000 mm/min. Entretanto, a velocidade de corte v c escolhida foi 603 mm/min (16000 RPM) que é a máxima velocidade de corte alcançada para uma ferramenta de φ 12 mm com a máquina-ferramenta disponível. A escolha dessa velocidade de corte está relacionada simplesmente a obter a máxima velocidade de corte para o processo.
87 86 Tabela 3.4: Parâmetros de corte utilizados na fabricação do componente. Parâmetros de corte Combinações ap ae fz (mm) (mm) (mm/dente) nº ap ae fz (mm) (mm) (mm/dente) 0,1 0,1 0,05 1º 0,2 0,2 0,2 0,2 0,2 0,2 2º 0,1 0,1 0,05 3º 0,2 0,1 0,05 4º 0,1 0,1 0,2 5º 0,2 0,1 0,2 6º 0,1 0,2 0,05 7º 0,1 0,2 0,2 8º 0,2 0,2 0,05 Utilizando esses parâmetros de corte foram programadas trajetórias de ferramenta utilizando os 5-eixos da máquina-ferramenta, simultaneamente (Figura 3.12) para acabamento das superfícies de pressão e sucção. Devido à maquina-ferramenta ser altamente rígida e não ter folgas o corte concordante foi escolhido (KARINO, 1996). As superfícies de sucção e de pressão foram usadas como superfícies de referência para a inclinação da ferramenta e também. Buscando-se os melhores valores para rugosidade real e também uma usinagem livre de invasões, procuro-se inclinar a ferramenta em 70º (α ), com relação à normal à superfície e no sentido transversal a direção de avanço da ferramenta de corte e 0º ( β ), com relação à normal à superfície e no sentido de avanço da ferramenta de corte.

88 87 Figura 3.12: Estratégia para acabamento das superfícies Procedimento para criação de simulador de máquina-ferramenta. Para o fresamento 5-eixos existe a necessidade de utilização de simuladores realísticos que levem em conta todo o volume de trabalho da máquina-ferramenta e os dispositivos instalados, tais como morsas e dispositivos de preset. Entretanto, a máquinas-ferramenta utilizada nos experimentos, muito menos os dispositivos de fixação e preset não fazem parte da biblioteca de máquinas-ferramenta do software UG NX. Contudo, no presente trabalho foi desenvolvido um simulador com as características geométricas da máquina-ferramenta do laboratório CCM do ITA com todos os dispositivos utilizados pela máquina-ferramenta para realização do processo de fresamento. As etapas para a criação desse simulador são apresentadas a seguir: Aquisição das características geométricas da maquina-ferramenta estudada; (curso dos eixos XYZ e posição relativa dos eixos rotativos A e C);
89 88 Adição de dispositivos como o de refrigeração e preset de ferramentas que estão presentes no volume de trabalho; Adição de características cinemáticas com ajuda do módulo Machine Tool Builder do software UG NX 3; Criação de VNC a partir de pós-processador criado para a máquina-ferramenta simulada; Inclusão da máquina-ferramenta na Biblioteca de maquinas do UG NX3. Primeiro, foi feito uma mapeamento de características geométricas da maquinaferramenta (Figura 3.13). Essas características incluem as posições relativas dos eixos rotativos A e C e o volume de trabalho da máquina-ferramenta.

90 89 Figura 3.13: Características geométricas da máquina-ferramenta. Adicionar detalhes dos sistemas auxiliares da máquina-ferramenta foi o escopo da etapa 2 do desenvolvimento do simulador. Os sistemas inclusos foram dispositivo para medição de ferramenta de corte, sistema de refrigeração, porta ferramentas, etc. (Figura 3.14).

91 90 Figura 3.14: Modelo CAD da maquina ferramenta simulada. Feita a modelagem da máquina-ferramenta, seguiu-se para etapa 3 que foi introduzir ao modelo geométrico as características cinemáticas da máquina-ferramenta, como por exemplo, definir a direção dos eixos de translação e dos sentidos de giro, positivo e negativo dos eixos rotativos ou de orientação da ferramenta. Na etapa 4 foi criado um VNC (Virtual Numerical Control) que pudesse emular o CN (Comando Numérico) Siemens 840D com o simulador. Tinha-se como objetivo a criação de um VNC que obtivesse todas as características do comando. A última etapa foi adicionar a máquina-ferramenta à biblioteca de máquinas-ferramenta do UG NX, para que o modelo cinemático de máquina-ferramenta criado fosse utilizado no modulo de manufatura do UG NX. Construído o simulador conforme descrito nesta subseção as operações programadas para a fabricação dos componentes foram simuladas. As operações CAM que até então estão
,")
92 descritas em formato genérico são transformadas em código NC e simuladas no ambiente virtual construído Procedimento para medição dos percursos da ferramenta de corte Para a avaliação das características dinâmicas e de interpolações disponíveis no comando da máquina-ferramenta (SIEMENS 840D), optou-se pela coleta de dados em tempo real via interface OPI (Operator Panel Interface). Essa porta foi conectada a uma placa PCI (SIMATIC NET-CP5611 MPI) através de um cabo MPI (Multi-Point Interface) (Figura 3.15). Assim, grande parte das informações que estão disponíveis na HMI (Human Machine Interface) se tornaram disponíveis num PC, utilizando um conversor de comunicação CNC- PC (software NCDDE, que acompanha o pacote MMC Start Up, da empresa SIEMENS). Figura 3.15: Sistema para aquisição de dados em tempo real do CNC.
.")
93 92 A partir desse conversor, já no formato DDE (Dynamic Data Exchange), utilizou-se uma rotina desenvolvida na plataforma LabVIEW, que pode utilizar esse como entrada para monitorar e coletar os dados. A rotina disponibiliza e armazena os dados num arquivo de texto que podem ser levados para análise em outro software (geração de gráficos, planilhas, etc). A matriz de ensaios utilizada para os ensaios de interpolação está definida na Tabela 3.5. Tabela 3.5: Matriz de teste para os ensaios de interpolações. fz (mm/dente) 0,1 (3183mm/min) 0,2 (6366mm/min) 0,3 (9549) Tolerância CAM (mm) 0,025 0,005 0,001 Interpolação Linear Circular Polinomial Foram mantidas fixas a profundidade de corte lateral (ae), a profundidade de corte axial (ap), a velocidade de corte (vc). As variáveis ensaiadas foram o avanço por dente (fz), e tolerância CAM (intol/outol). Foram escolhidas 3 opções de Tolerância CAM e 3 tipos de interpolação gerando 27 combinações. A tolerância CAM (intol/outol) é definida como a máxima distancia entre uma reta definida entre dois pontos consecutivos interpolados na geração de trajetória de ferramenta e o perfil da peça entre esses pontos (aproximado por um arco) (Figura 3.16). Figura 3.16: Tolerância (intol/outol) utilizada na programação CAM
.")


94 93 A partir dos resultados, procurou-se definir um perfil que caracterizasse a usinagem por acelerações e desacelerações dos eixos. Esse perfil foi baseado no modelo utilizado para homologação de máquinas-ferramenta definido pela Associação Alemã de Fabricantes de Máquinas-Ferramenta (Verein Deutscher Werkzeugmachinenfabriken). O perfil foi dividido em 27 raias como a mostrada na Figura Figura 3.17: Teste de Interpolação de trajetória de ferramenta. Apesar do estudo realizado com os tipo de interpolações interpretadas pelo comando numérico não foi possível a utilização de todos eles para a fabricação de componentes em 5- eixos simultâneos. A única interpolação para 5-eixos simultâneos no software UG NX é a interpolação linear. Essa foi a interpolação escolhida para a fabricação do componente devido a essas restrições encontradas Pós-processamento dos programas O código NC das trajetórias de ferramenta de corte das operações programadas com o software CAM foram validadas através da simulação do código no simulador criado. Feita a simulação, é necessária a criação dos programas que serão executados na máquinaferramenta. Para tanto, um pós-processador foi desenvolvido com o auxilio do aplicativo PostBuilder da empresa UGS. Este aplicativo destina-se a criação e edição de pós-
95 94 processadores NC. Com as informações adquiridas com a criação do modelo simulador de máquina-ferramenta também pode-se criar um pós-processador. Toda a formatação do código NC para o NC Sinumerik 840 D foi dado com o auxilio desse software desde formado das coordenadas, até informações dadas ao PLC da máquinaferramenta como ligar o sistema de refrigeração por exemplo. A esse pós-processador foi adicionada a função TRAORI que é uma comando usado para habilitar transformações 5-eixos no NC Sinumerik 840d. Com essa função ativada o NC passa a ser responsável pela conversão de dados de posição e orientação em movimentos de máquina. Em conjunto a função TRAORI, a orientação da ferramenta de corte foi definida a partir do versor (A3, B3, C3). Dessa forma, o programa gerado pelo pós-processador é independente da cinemática da máquina-ferramenta utilizada, visto que o pós-processador não fornece diretamente os movimentos dos eixos rotativos A e C e sim o versor (A3, B3, C3). Este serve como entrada para o processamento dos reais movimentos das mesas A e C que são definidos pelo próprio NC Procedimento para fabricação dos componentes Para a execução dos programas na máquina-ferramenta é necessário que a peça esteja bem fixa a mesa. Em paralelo às atividades CAD/CAM foi desenvolvido um dispositivo de fixação que serviu para a fixação do componente na mesa C da máquina-ferramenta. O dispositivo foi construído com componentes cilíndricos de fácil fabricação de forma a fixar a peça pelo seu centro. Dessa forma se teve acesso a todas as pás do componente numa só fixação. A Figura 3.18 ilustra o dispositivo criado para a fixação do componente.

96 95 Figura 3.18: Dispositivo de fixação para a fabricação do componente. Fixada a peça realizou-se o preset da peça e das ferramentas que foram utilizadas nas operações programadas. Feito isso, executou-se o programa com as operações programadas. Nesse programa estavam todas as operações e seus respectivos parâmetros pré-selecionados na programação CAM para analise posterior. Assim, obtém-se o componente com o término das operações realizadas pela máquina-ferramenta com as diversas situações que se quer estudar Procedimentos para medição de forma e acabamento da superfície usinada Com objetivo de se medir a qualidade superficial das superfícies fresadas em 5-eixos simultâneos foram feitas medições de rugosidade. As medições foram feitas numa mesma região de forma que a curvatura da superfície fosse um fator comum para as várias medições,
 a essas superfícies, optou-se por")

97 96 num total de 20 (10 superfícies de sucção e 10 superfícies de pressão). Devido às características de curvatura da superfície e ao acesso do instrumento de medição (rugosímetro) a essas superfícies, optou-se por aproximar a direção de medição por uma direção próxima à direção transversal ao avanço da ferramenta de corte (Figura 3.19). Figura 3.19: Direção das medições de rugosidade realizadas na peça. A Figura 3.20 mostra o esquema de montagem para as medições de rugosidades nas superfícies que forma usinadas. Figura 3.20: Montagem em bancada para medição de rugosidade.
98 97 Os parâmetros utilizados no equipamento para as medições de rugosidade, conforme ISO : 2000, para medição de rugosidade entre 0,1-2,0. São mostrados na Tabela 3.6: parâmetros utilizados no rugosímetro. Tabela 3.6: parâmetros utilizados no rugosímetro. Parâmetro Parâmetro selecionado Norma seguida ISO :2000 Comprimento de medição l (mm) 0,8 N (número de amostras) 5 Extensão medida ln (mm) 4 Filtro PC50 (Gaussiano) A digitalização é a primeira etapa do processo de engenharia reversa. Existem duas formas de capturar pontos de um modelo: a primeira é por contato físico (um componente físico conhecido como apalpador (probe) toca a geometria e coleta pontos do seu perfil) (Figura 3.21); a segunda, sem contato físico (recursos ópticos e/ou sensores de luz projetam feixes de luz sobre a geometria). Para a avaliação da forma do modelo físico (peça usinada em 5-eixos) e sua comparação com o modelo CAD utilizou-se a técnica por contato físico. Através do software de inspeção PowerINSPECT e de um braço de inspeção articulado da empresa CIMCORE foram coletados pontos de interesse da geometria (pontos nas superfícies usinadas em 5-eixos). A partir desses pontos foram comparados o modelo CAD e o modelo físico (Figura 3.21).






99 Figura 3.21: Inspeção da geometria estudada no trabalho. 98

100 99 4 Análise dos resultados 4.1 Análise de geometrias importadas (IGES, PARASOLID) Serão analisadas a seguir as superfícies da geometria estudada neste trabalho. Os resultados são qualitativos devido aos objetivos do trabalho. O desenvolvimento de algoritmos e estruturas de arquivos não está no escopo desse trabalho. A pá do impelidor foi propositalmente modelada com dimensões maiores de forma a ser cortada (trimmed) posteriormente em suas dimensões corretas. Dessas operações resultaram as superfícies de proteção (Shroud surfaces) e as superfícies de sucção e pressão, que são superfícies trimadas (Figura 4.1). Figura 4.1: Procedimento de modelagem das pás de um compressor. Esse procedimento de modelagem acarretou num contorno mais complexo das bordas nas superfícies de sucção e pressão. A Figura 4.2 mostra a parametrização original de uma das superfícies de sucção da geometria. Ela permanece após a operação booleana de corte das superfícies.
 e na documentação que acompanha o software UG NX 3.")

101 100 Figura 4.2: Parametrização original e superfície após operação booleana (trimming). Para a reparametrização das superfícies, utilizou se o método de Coons conforme mencionado na referencia YANG (2003) e na documentação que acompanha o software UG NX 3. A trajetória de ferramenta gerada utilizando formato IGES é mostrada na Figura 4.3. No detalhe são mostrados erros na trajetória que se deve a ineficiência do algorítmo de reparametrização e resultado das características de borda da superfície trimada. Figura 4.3: Geração de trajetória de ferramenta na superfície. Para as geometrias exportadas em formato PARASOLID esse problema não foi evidenciado. Para confirmar que os erros gerados na trajetória eram de fato oriundos das

102 operações boolenas efetuadas sob essas superfícies, constatou-se a necessidade de um outro experimento. 101 Na Figura 4.3 são mostrados exemplos de trajetórias de ferramenta criadas para as 3 superfícies criadas para esse estudo de geração de trajetória de ferramenta. Nota-se uma mudança na forma da trajetória mediante a complexidade das bordas geradas pelas operações de corte (trimming). Na Figura 4.4 é mostrado o que acontece se o grau de complexidade da operação de trimagem aumenta. Figura 4.4:Superfícies utilizadas para avaliação de geração de trajetória. Na Figura 4.5 são mostradas trajetórias de ferramenta para a complexidade de borda 1. As inclinações escolhidas no sentido do avanço da ferramenta β (lead) e para as inclinações escolhidas no sentido transversal ao avanço da ferramentaα (tilt) também são mostradas na

103 102 Figura 4.5. Pode-se observar que a superfície foi reparametrizada com sucesso visto que a trajetória de ferramenta é satisfatória. Figura 4.5: Trajetórias gerada para superfície com complexidade de borda 1. Na verificação da trajetória os movimentos se mostraram bastante suaves. Portanto, o processo de fabricação em 5-eixos para essa superfície se mostra bastante viável em virtude da qualidade da trajetória de ferramenta obtida. A forma da trajetória não foi alterada mesmo com a variação na inclinação da ferramenta de 30º para ambos os ângulos α e β não alterou em nada a forma da trajetória. Confirmando a literatura [60] (YANG, 2003), pode-se observar que a medida que se aumenta a complexidade da borda da superfície, o erro proporcionado na trajetória também


104 aumenta (Figura 4.6). Percebe-se que para com esse nível de complexidade o algoritmo de reparametrização deixa de ser eficiente. 103 Figura 4.6: Trajetória gerada para superfície com complexidade de borda 2 e β 15º. A trajetória da ferramenta apresenta descontinuidades que geram movimentos bruscos da ferramenta de corte. As linhas que descrevem visualmente a trajetória dão voltas em cima delas mesmas, fazendo que o processo de fresamento gerado seja improdutivo já que a ferramenta de corte passa pela mesma região algumas vezes seguidas. Figura 4.7: Trajetória gerada para superfície com complexidade de borda 2 e β 45º. Aumentando-se a inclinação da ferramenta de corte verificou-se um aumento do número de movimentos bruscos e a magnitude deles bem como a improdutividade da trajetória também aumentou visto que pode ser visto na Figura 4.7, a trajetória dá voltas em cima dela mesma um número de vezes maior que na Figura 4.6.


105 104 Figura 4.8: Trajetória gerada para superfície com complexidade de borda 2 e α 15º. A Figura 4.8 mostra a trajetória gerada para as inclinações de ferramenta no sentido transversal ao avanço. Pode-se ver comportamento similar ao acontecido com inclinações no sentido de avanço. A medida que se aumenta a inclinação da ferramenta aumenta-se também a complexidade da trajetória da ferramenta gerada. Figura 4.9: Trajetória gerada para superfície com complexidade de borda 2 e α 45º. Essas mesmas conclusões podem ser tiradas com relação ao 3º de complexidade de borda de superfície Figura 4.10.

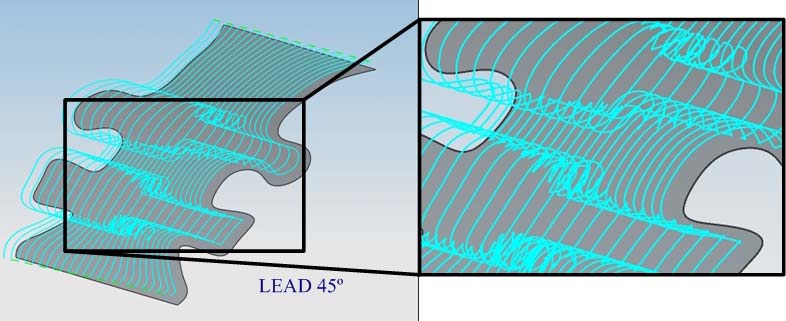
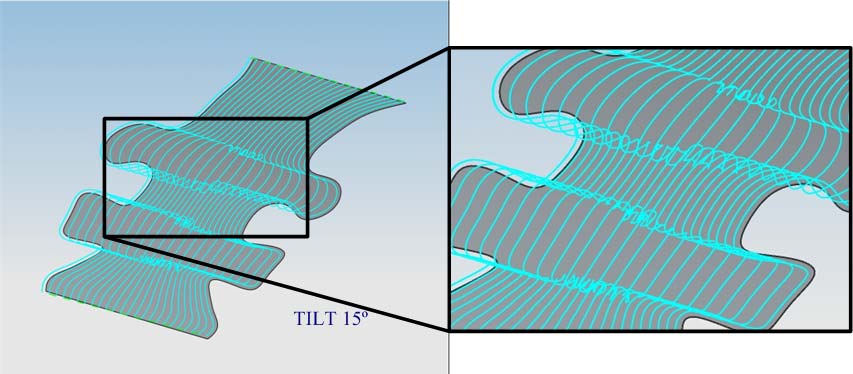
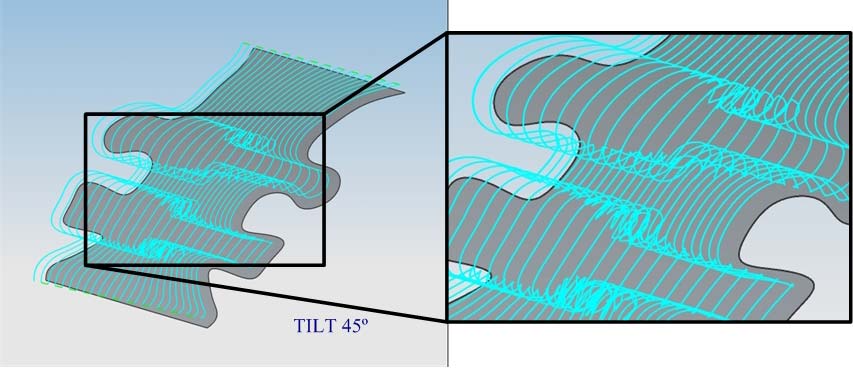
106 Figura 4.10: Trajetória gerada para superfície com complexidade de borda
 foi modelada uma spline única que consequentemente foi base para a")
107 Análise da remodelagem de geometrias 3D para fresamento 5-eixos Com as três curvas do modelo anterior (duas retas e um arco) foi modelada uma spline única que consequentemente foi base para a criação de uma superfície de revolução suave (Figura 4.11). Figura 4.11: Analise Gaussiana após remodelagem. A superfície foi submetida a uma análise da sua curvatura gaussiana. A variação de curvatura acontece de forma gradual, não ocorrendo mudanças bruscas de curvatura como acontecia no modelo original. A importância dessa transição se dá pela ligação entre a inclinação da ferramenta e os vetores normais à superfície. Se há transições bruscas de curvatura na superfície, consequentemente acontecem mudanças bruscas de inclinação da ferramenta de corte. Muitas vezes isso ocasiona invasão das superfícies, mas pode chegar a ocasionar uma colisão entre componentes da máquina-ferramenta. Também foram verificados alguns erros nas operações de corte (trimming) das pás. Esses erros se caracterizavam por, novamente, terem sido usados arcos e retas para a definição do contorno, resultando em superfícies de proteção (Shroud surfaces) descontinuas (Figura 4.12). Essas descontinuidades eram similares as encontrados anteriormente, sendo que

108 107 dessa vez as superfícies utilizadas como superfícies de corte (trim surface) é que tinham descontinuidade ocasionada pelo mesmo motivo anteriormente comentado. Essa descontinuidade foi consertada da mesma forma que da vez anterior. Figura 4.12: Descontinuidade na superfície de proteção. 4.3 Análise das medições dos percursos da ferramenta de corte em tempo real A seguir são apresentadas as análises das trajetórias de ferramenta. Vale ressaltar que esses resultados caracterizam os equipamentos e peça presentes nos ensaios (CNC, máquinaferramenta, sistema CAD/CAM e geometria da peça). Mantendo-se a tolerância CAM de 0,025 mm e o avanço por dente f z = 0,1 mm/z (pequeno), e variando-se os tipos de interpolação, o comportamento da velocidade de avanço v f na trajetória programada é mostrado na Figura Verifica-se que existe quase o mesmo comportamento para as interpolações linear e polinomial. Para trechos do perfil aproximados por arcos a interpolação circular teve um comportamento melhor, isto é, a velocidade de avanço programada de 3183 mm/min foi alcançada nesse trecho. A semelhança entre os perfis de velocidade polinomial e linear para essa situação pode ser atribuída a tolerância CAM de 0,025 mm que é pequena para geração de polinômios de grau superior a 1.
.")
109 108 Figura 4.13: Velocidade para f z = 0,1mm/z e tol.cam de 0,025 mm. A medida que se diminui a tolerância CAM se diminui a capacidade de se gerar arcos para interpolação circular fazendo com que a interpolação circular se assemelhe à interpolação linear (Figura 4.14). Na Figura 4.14 podem ser observadas situações em que a velocidade de avanço ficou constante em alguns instantes para os tipos de interpolação, chegando a atingir a velocidade programada de 3183 mm/min utilizando tolerâncias CAM menores. Essa característica é independente do tipo de interpolação que se estava utilizada. Para uma velocidade de avanço constante tem-se que a aceleração é zero. Esse argumento pode ser utilizado para explicar a causa dos melhores desempenhos de trajetórias com valores de tolerância CAM menores. Para uma tolerância CAM pequena e valores de avanço por dente f z de 0,1 mm a variação de aceleração foi pequena.
 Interpolação linear, (b) Interpolação")
110 Figura 4.14: (a) Interpolação linear, (b) Interpolação Circular, (c) Interpolação Polinomial. 109

111 110 Figura 4.15: Tempo X Tolerância CAM para: (a) Linear (b) Circular e (c) Polinomial. Analisando-se o tempo para execução de uma trajetória vê-se que ele diminui com o aumento da velocidade média de avanço e decréscimo da tolerância CAM. Essa constatação pode ser feita analisando a Figura 4.15 que é o tempo para percorrer a trajetória programada como uma função da tolerância CAM utilizada. Outra informação que pode ser obtida analisando a Figura 4.15 é que o aumento do avanço por dente f z de 0,1 para 0,3 mm não ocasionou ganhos significativos na velocidade do
). Figura 4.")
112 111 processo. Ou seja, o tempo de execução da trajetória não foi significantemente diminuído. Ao contrário, para a interpolação linear, o aumento do avanço por dente f z fez com que o tempo de execução se tornasse maior para tolerância CAM de 0,025mm (Figura 4.15(a)). Figura 4.16: Velocidade para f z = 0,3mm/z para as interpolações: (a) Linear (b) Circular (c) Polinomial.
113 112 Analisando a Figura 4.16, vê-se que em nenhum momento a velocidade de avanço ficou constante isso se deve as altas velocidades de avanço empregadas nessa situação. Para o avanço por dente f z = 0,3mm/dente, tem-se que apenas a interpolação polinomial chegou próximo à velocidade de avanço (v f ) programada de 9549 mm/min, acontecendo para uma tolerância CAM de 0,001mm. 4.4 Analise do simulador 3D da máquina-ferramenta. Apresenta-se nessa subseção os resultados alcançados para o simulador de máquinaferramenta desenvolvido para esse trabalho. Através do simulador construído, se conseguiu prever colisões dos componentes presentes nas mesas da máquina-ferramenta, bem como realizar análises a respeito das estratégias de corte utilizadas. Obteve-se uma informação fiel a respeito do volume de trabalho da máquina-ferramenta nas etapas de programação. Foi possível a utilização de mais de uma janela (vista) para visualização da simulação do processo de fresamento 5-eixos. Essa ferramenta auxilia na análise da simulação e na sua posterior validação (Figura 4.17), ou seja, facilita a visualização de possíveis colisões. A interface com o programador é fácil, não sendo necessários, por exemplo, conhecimentos a respeito de como foi construído o simulador. Existe a possibilidade de se parar a simulação, aumentar e diminuir a velocidade em que ela ocorre. Além disso, pode-se mudar o ângulo de visão em qualquer uma das janelas de visualização criadas. Existe a necessidade de um hardware adequado para se ter um bom aproveitamento do simulador. Um micro computador com 2GB de memória RAM e uma placa de vídeo de 256 MB se mostrou ser uma configuração satisfatória para as tarefas de simulação desse trabalho.

114 113 Figura 4.17: Simulação de processo de fresamento 5-eixos. Além disso, se consegue acompanhar a retirada de material na simulação fazendo com que esta seja realista. Para essa tarefa é requerido bastante processamento do micro computador. Comportamento semelhante de processamento teve-se quando se optou por fazer a verificação automática de colisão. Por fim, algumas funções especificas do comando SINUMERIK 840D, tais como, TRANS, ROT, ATRANS, AROT e TRAORI não foram totalmente emuladas no VNC devido as características desses recursos que não estão disponíveis na biblioteca de comandos do software utilizado para criação do VNC (Post Builder).

. Figura 4.18: Perfis das pás submetidas a operações de acabamento.")
115 Análise do processo de fabricação das superfícies O processo de fabricação foi bem sucedido tendo em vista que não aconteceu nenhuma colisão ou invasão das superfícies de pressão e de sucção das pás do impelidor. Entretanto, problemas como vibração das pás foram evidenciados durante o processo, o que não pode ser previsto no processo de simulação e verificação das estratégias criadas. Essa vibração foi causada pelo próprio perfil das pás, que era muito esbelto (Figura 4.18). Figura 4.18: Perfis das pás submetidas a operações de acabamento. Para solucionar os problemas de vibração, ferramentas positivas e condições de engajamento melhoradas foram necessárias. Essas condições proporcionaram diminuição da vibração e conseqüente execução das operações programadas para os ensaios. Além disso, não se consegui trabalhar com velocidades de avanço v f superiores a (3200 mm/min) em 5-eixos simultâneos. Nessa situação, verificou-se na HMI (Human
116 Machine Interface) grande variação da velocidade de avanço o que caracteriza um processo instável. 115 Para avanços menores, observaram-se movimentos suaves e contínuos da máquinaferramenta. Os eixos de rotação limitaram a velocidade de avanço devido à necessidade de sincronização entre os eixos de translação e rotação. Os melhores estratégias no que se refere a movimentação dos eixos se deram quando se estava utilizando velocidade de avanço v f de 1600 mm/min (f z 0,05mm/dente), essa velocidade foi alcançado interpolando os 5 eixos da máquina-ferramenta simultaneamente. A outra velocidade de avanço programada v f de 6400 mm/min (f z 0,2mm/dente) não foi alcançada. Para este último caso a velocidade de avanço v f oscilou por volta de 3500 mm/min. 4.6 Análise das medições das superfícies Usinadas As análises das superfícies usinadas mostram desvios de forma e acabamento superficial satisfatório. Segundo informações colhidas com projetistas desses componentes, o acabamento superficial deveria ficar com R z máximo de 5µm. Para todas as medições de rugosidade os valores de R z ficaram abaixo desse valor. A Figura 4.19 mostra os perfis de rugosidade medido para os maiores valores de R z encontrados para ambas as superfícies de pressão e sucção. Além disso, a Figura 4.19 mostra o perfil de rugosidade após o uso do filtro Gaussiano PC50 que é usado como filtro passa alta. O seu uso é necessário devido a própria curvatura das superfícies.
, para uma ferramenta de corte de topo esférico a rugosidade no sentido transversal ao avanço da")
117 116 Figura 4.19: Rugosidade da superfície de sucção para o maior R z. Confirmando a referência ZANDER (1995), para uma ferramenta de corte de topo esférico a rugosidade no sentido transversal ao avanço da ferramenta é maior para a maior profundidade de corte radial a e (0,2mm).

118 117 Figura 4.20: Rugosidade da superfície de pressão para o maior R z. Os menores e valores de R z encontrados para as superfícies de sucção são mostrados na figura a seguir (Figura 4.21).

119 118 Figura 4.21: Rugosidade da superfície de sucção para o menor R z. Os menores valores de R z para as superfícies de pressão são mostrados na Figura 4.22.

120 119 Figura 4.22: Rugosidade da superfície de pressão para o menor R z. As análises das medições feitas com auxílio de sistemas de inspeção mostraram que, para todas as pás, foram obtidos erros de forma dentro das especificações de projeto (Figura 4.23).

121 120 Figura 4.23: Erro de forma encontrado nas medições feitas. O desvio padrão σ dos pontos coletados foi de 0,053mm, o que caracteriza uma pequena dispersão dos valores coletados em torno da média calculada.
15 Computador, projeto e manufatura
 A U A UL LA Computador, projeto e manufatura Um problema Depois de pronto o desenho de uma peça ou objeto, de que maneira ele é utilizado na fabricação? Parte da resposta está na Aula 2, que aborda as
A U A UL LA Computador, projeto e manufatura Um problema Depois de pronto o desenho de uma peça ou objeto, de que maneira ele é utilizado na fabricação? Parte da resposta está na Aula 2, que aborda as
Características da Usinagem CNC
 Características da Usinagem CNC CN: comando numérico É o código propriamente dito! CNC: comando numérico computadorizado É o sistema de interpretação e controle de equipamentos que se utilizam de CN para
Características da Usinagem CNC CN: comando numérico É o código propriamente dito! CNC: comando numérico computadorizado É o sistema de interpretação e controle de equipamentos que se utilizam de CN para
A sigla CAD pode representar duas definições principais, das quais muitas vezes são empregadas inadequadamente:
 A sigla CAD pode representar duas definições principais, das quais muitas vezes são empregadas inadequadamente: Computer Aided Drafting (CAD) a palavra drafting pode ser traduzida como desenho técnico,
A sigla CAD pode representar duas definições principais, das quais muitas vezes são empregadas inadequadamente: Computer Aided Drafting (CAD) a palavra drafting pode ser traduzida como desenho técnico,
DESENHO TÉCNICO AULA 01
 DESENHO TÉCNICO AULA 01 INTRODUÇÃO Computação Gráfica A computação gráfica é a área da ciência da computação que estuda a transformação dos dados em imagem. Esta aplicação estende-se à recriação visual
DESENHO TÉCNICO AULA 01 INTRODUÇÃO Computação Gráfica A computação gráfica é a área da ciência da computação que estuda a transformação dos dados em imagem. Esta aplicação estende-se à recriação visual
Sua indústria. Seu show. Seu Futuro
 Sua indústria. Seu show. Seu Futuro Usinagem 5-Eixos para Moldes Sandro, Vero Software Vero Software está no topo do relatório de fornecedores de CAM da CIMData 2014 Com maior Market Share, crescimento
Sua indústria. Seu show. Seu Futuro Usinagem 5-Eixos para Moldes Sandro, Vero Software Vero Software está no topo do relatório de fornecedores de CAM da CIMData 2014 Com maior Market Share, crescimento
Tecnologias CAx na Manufatura. Valter Vander de Oliveira Disciplina: Sistemas Industriais
 Tecnologias CAx na Manufatura Valter Vander de Oliveira Disciplina: Sistemas Industriais Tecnologias CAx Conteúdo: Conceito de tecnologia CAx Evolução das tecnologias CAx Sistemas CAD/CAE/CAPP/CAM/CAI
Tecnologias CAx na Manufatura Valter Vander de Oliveira Disciplina: Sistemas Industriais Tecnologias CAx Conteúdo: Conceito de tecnologia CAx Evolução das tecnologias CAx Sistemas CAD/CAE/CAPP/CAM/CAI
DA INTERPOLAÇÃO SPLINE COMO TRAJETÓRIA DA FERRAMENTA NA MANUFATURA SUPERFÍCIES COMPLEXAS ATRAVÉS DE FERRAMENTAS DOE (DESING OF EXPERIMENTS)
") 18º Congresso de Iniciação Científica AVALIAÇÃO DA INTERPOLAÇÃO SPLINE COMO TRAJETÓRIA DA FERRAMENTA NA MANUFATURA SUPERFÍCIES COMPLEXAS ATRAVÉS DE FERRAMENTAS DOE (DESING OF EXPERIMENTS) Autor(es) MARCO
18º Congresso de Iniciação Científica AVALIAÇÃO DA INTERPOLAÇÃO SPLINE COMO TRAJETÓRIA DA FERRAMENTA NA MANUFATURA SUPERFÍCIES COMPLEXAS ATRAVÉS DE FERRAMENTAS DOE (DESING OF EXPERIMENTS) Autor(es) MARCO
GARANTIA DA QUALIDADE DE SOFTWARE
 GARANTIA DA QUALIDADE DE SOFTWARE Fonte: http://www.testexpert.com.br/?q=node/669 1 GARANTIA DA QUALIDADE DE SOFTWARE Segundo a NBR ISO 9000:2005, qualidade é o grau no qual um conjunto de características
GARANTIA DA QUALIDADE DE SOFTWARE Fonte: http://www.testexpert.com.br/?q=node/669 1 GARANTIA DA QUALIDADE DE SOFTWARE Segundo a NBR ISO 9000:2005, qualidade é o grau no qual um conjunto de características
Mandrilamento. determinado pela operação a ser realizada. A figura a seguir mostra um exemplo de barra de mandrilar, também chamada de mandril.
 A UU L AL A Mandrilamento Nesta aula, você vai tomar contato com o processo de mandrilamento. Conhecerá os tipos de mandrilamento, as ferramentas de mandrilar e as características e funções das mandriladoras.
A UU L AL A Mandrilamento Nesta aula, você vai tomar contato com o processo de mandrilamento. Conhecerá os tipos de mandrilamento, as ferramentas de mandrilar e as características e funções das mandriladoras.
Hardware (Nível 0) Organização. Interface de Máquina (IM) Interface Interna de Microprogramação (IIMP)
 Organização. Interface de Máquina (IM) Interface Interna de Microprogramação (IIMP)") Hardware (Nível 0) Organização O AS/400 isola os usuários das características do hardware através de uma arquitetura de camadas. Vários modelos da família AS/400 de computadores de médio porte estão disponíveis,
Hardware (Nível 0) Organização O AS/400 isola os usuários das características do hardware através de uma arquitetura de camadas. Vários modelos da família AS/400 de computadores de médio porte estão disponíveis,
Na medida em que se cria um produto, o sistema de software, que será usado e mantido, nos aproximamos da engenharia.
 1 Introdução aos Sistemas de Informação 2002 Aula 4 - Desenvolvimento de software e seus paradigmas Paradigmas de Desenvolvimento de Software Pode-se considerar 3 tipos de paradigmas que norteiam a atividade
1 Introdução aos Sistemas de Informação 2002 Aula 4 - Desenvolvimento de software e seus paradigmas Paradigmas de Desenvolvimento de Software Pode-se considerar 3 tipos de paradigmas que norteiam a atividade
TRABALHO COM GRANDES MONTAGENS
 Texto Técnico 005/2013 TRABALHO COM GRANDES MONTAGENS Parte 05 0 Vamos finalizar o tema Trabalho com Grandes Montagens apresentando os melhores recursos e configurações de hardware para otimizar a abertura
Texto Técnico 005/2013 TRABALHO COM GRANDES MONTAGENS Parte 05 0 Vamos finalizar o tema Trabalho com Grandes Montagens apresentando os melhores recursos e configurações de hardware para otimizar a abertura
ISO 9001:2008. Alterações e Adições da nova versão
 ISO 9001:2008 Alterações e Adições da nova versão Notas sobe esta apresentação Esta apresentação contém as principais alterações e adições promovidas pela edição 2008 da norma de sistema de gestão mais
ISO 9001:2008 Alterações e Adições da nova versão Notas sobe esta apresentação Esta apresentação contém as principais alterações e adições promovidas pela edição 2008 da norma de sistema de gestão mais
MRP II. Planejamento e Controle da Produção 3 professor Muris Lage Junior
 MRP II Introdução A lógica de cálculo das necessidades é conhecida há muito tempo Porém só pode ser utilizada na prática em situações mais complexas a partir dos anos 60 A partir de meados da década de
MRP II Introdução A lógica de cálculo das necessidades é conhecida há muito tempo Porém só pode ser utilizada na prática em situações mais complexas a partir dos anos 60 A partir de meados da década de
Referências internas são os artefatos usados para ajudar na elaboração do PT tais como:
 Plano de Teste (resumo do documento) I Introdução Identificador do Plano de Teste Esse campo deve especificar um identificador único para reconhecimento do Plano de Teste. Pode ser inclusive um código
Plano de Teste (resumo do documento) I Introdução Identificador do Plano de Teste Esse campo deve especificar um identificador único para reconhecimento do Plano de Teste. Pode ser inclusive um código
Governança de TI. ITIL v.2&3. parte 1
 Governança de TI ITIL v.2&3 parte 1 Prof. Luís Fernando Garcia LUIS@GARCIA.PRO.BR ITIL 1 1 ITIL Gerenciamento de Serviços 2 2 Gerenciamento de Serviços Gerenciamento de Serviços 3 3 Gerenciamento de Serviços
Governança de TI ITIL v.2&3 parte 1 Prof. Luís Fernando Garcia LUIS@GARCIA.PRO.BR ITIL 1 1 ITIL Gerenciamento de Serviços 2 2 Gerenciamento de Serviços Gerenciamento de Serviços 3 3 Gerenciamento de Serviços
OpenGL. Uma Abordagem Prática e Objetiva. Marcelo Cohen Isabel Harb Manssour. Novatec Editora
 OpenGL Uma Abordagem Prática e Objetiva Marcelo Cohen Isabel Harb Manssour Novatec Editora Capítulo 1 Introdução A Computação Gráfica é uma área da Ciência da Computação que se dedica ao estudo e ao desenvolvimento
OpenGL Uma Abordagem Prática e Objetiva Marcelo Cohen Isabel Harb Manssour Novatec Editora Capítulo 1 Introdução A Computação Gráfica é uma área da Ciência da Computação que se dedica ao estudo e ao desenvolvimento
CONTROLE DE QUALIDADE e VALIDAÇÃO DE PRODUTO CARTOGRÁFICO
 CONTROLE DE QUALIDADE e VALIDAÇÃO DE PRODUTO CARTOGRÁFICO Editar dados em vários formatos e armazenar estas informações em diferentes sistemas é provavelmente uma das atividades mais comuns para os profissionais
CONTROLE DE QUALIDADE e VALIDAÇÃO DE PRODUTO CARTOGRÁFICO Editar dados em vários formatos e armazenar estas informações em diferentes sistemas é provavelmente uma das atividades mais comuns para os profissionais
PLANEJAMENTO DO PROCESSO ASSISTIDO POR COMPUTADOR - CAPP
 PLANEJAMENTO DO PROCESSO ASSISTIDO POR COMPUTADOR - CAPP Prof. João Carlos Espíndola Ferreira, Ph.D. www.grima.ufsc.br/jcarlos/ jcarlos@emc.ufsc.br Universidade Federal de Santa Catarina Departamento de
PLANEJAMENTO DO PROCESSO ASSISTIDO POR COMPUTADOR - CAPP Prof. João Carlos Espíndola Ferreira, Ph.D. www.grima.ufsc.br/jcarlos/ jcarlos@emc.ufsc.br Universidade Federal de Santa Catarina Departamento de
1. NÍVEL CONVENCIONAL DE MÁQUINA
 1. NÍVEL CONVENCIONAL DE MÁQUINA Relembrando a nossa matéria de Arquitetura de Computadores, a arquitetura de Computadores se divide em vários níveis como já estudamos anteriormente. Ou seja: o Nível 0
1. NÍVEL CONVENCIONAL DE MÁQUINA Relembrando a nossa matéria de Arquitetura de Computadores, a arquitetura de Computadores se divide em vários níveis como já estudamos anteriormente. Ou seja: o Nível 0
Itinerários de Ônibus Relatório Final
 CENTRO UNIVERSITÁRIO SENAC Itinerários de Ônibus Relatório Final Grupo 5 Caio Roque Daniel Nunes Elise Roese José Caneiro Marcos Grignani São Paulo Junho de 2007 1 ÍNDICE 1. Introdução... 3 2. Desenvolvimento...
CENTRO UNIVERSITÁRIO SENAC Itinerários de Ônibus Relatório Final Grupo 5 Caio Roque Daniel Nunes Elise Roese José Caneiro Marcos Grignani São Paulo Junho de 2007 1 ÍNDICE 1. Introdução... 3 2. Desenvolvimento...
INSTITUTO FEDERAL DE SANTA CATARINA CAD/CAM. Profº Emerson Oliveira Matéria: CAD/CAM emerson.oliveira@ifsc.edu.br Câmpus Joinville
 INSTITUTO FEDERAL DE SANTA CATARINA CAD/CAM Profº Emerson Oliveira Matéria: CAD/CAM emerson.oliveira@ifsc.edu.br Câmpus Joinville Etapas CAD/CAM Quando o sistema tem comunicação direta. CAD/CAM Quando
INSTITUTO FEDERAL DE SANTA CATARINA CAD/CAM Profº Emerson Oliveira Matéria: CAD/CAM emerson.oliveira@ifsc.edu.br Câmpus Joinville Etapas CAD/CAM Quando o sistema tem comunicação direta. CAD/CAM Quando
Usando o Arena em Simulação
 Usando o Arena em Simulação o ARENA foi lançado pela empresa americana Systems Modeling em 1993 e é o sucessor de dois outros produtos de sucesso da mesma empresa: SIMAN (primeiro software de simulação
Usando o Arena em Simulação o ARENA foi lançado pela empresa americana Systems Modeling em 1993 e é o sucessor de dois outros produtos de sucesso da mesma empresa: SIMAN (primeiro software de simulação
Barra de ferramentas padrão. Barra de formatação. Barra de desenho Painel de Tarefas
 Microsoft Power Point 2003 No Microsoft PowerPoint 2003, você cria sua apresentação usando apenas um arquivo, ele contém tudo o que você precisa uma estrutura para sua apresentação, os slides, o material
Microsoft Power Point 2003 No Microsoft PowerPoint 2003, você cria sua apresentação usando apenas um arquivo, ele contém tudo o que você precisa uma estrutura para sua apresentação, os slides, o material
CALDsoft7 - Software de planificação em caldeiraria
 CALDsoft7 - Software de planificação em caldeiraria Calculando uma peça com o CALDsoft7 É muito simples calcular uma peça com o CALDsoft7, basta seguir os passos apresentados abaixo: - Escolher a peça
CALDsoft7 - Software de planificação em caldeiraria Calculando uma peça com o CALDsoft7 É muito simples calcular uma peça com o CALDsoft7, basta seguir os passos apresentados abaixo: - Escolher a peça
6. Geometria, Primitivas e Transformações 3D
 6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
Capítulo 3. Avaliação de Desempenho. 3.1 Definição de Desempenho
 20 Capítulo 3 Avaliação de Desempenho Este capítulo aborda como medir, informar e documentar aspectos relativos ao desempenho de um computador. Além disso, descreve os principais fatores que influenciam
20 Capítulo 3 Avaliação de Desempenho Este capítulo aborda como medir, informar e documentar aspectos relativos ao desempenho de um computador. Além disso, descreve os principais fatores que influenciam
Introdução à Computação
 Aspectos Importantes - Desenvolvimento de Software Motivação A economia de todos países dependem do uso de software. Cada vez mais, o controle dos processos tem sido feito por software. Atualmente, os
Aspectos Importantes - Desenvolvimento de Software Motivação A economia de todos países dependem do uso de software. Cada vez mais, o controle dos processos tem sido feito por software. Atualmente, os
CONTROLE NUMÉRICO E AUTOMATIZAÇÃO INDUSTRIAL INTRODUÇÃO: NOÇÕES BÁSICAS DE CNC
 CONTROLE NUMÉRICO E AUTOMATIZAÇÃO INDUSTRIAL INTRODUÇÃO: NOÇÕES BÁSICAS DE CNC Operador de máquinas convencionais Materiais recebidos pelo operador da Máquina Convencional Exemplo de Máquina Convencional
CONTROLE NUMÉRICO E AUTOMATIZAÇÃO INDUSTRIAL INTRODUÇÃO: NOÇÕES BÁSICAS DE CNC Operador de máquinas convencionais Materiais recebidos pelo operador da Máquina Convencional Exemplo de Máquina Convencional
DESENVOLVIMENTO DE UM SOFTWARE NA LINGUAGEM R PARA CÁLCULO DE TAMANHOS DE AMOSTRAS NA ÁREA DE SAÚDE
 DESENVOLVIMENTO DE UM SOFTWARE NA LINGUAGEM R PARA CÁLCULO DE TAMANHOS DE AMOSTRAS NA ÁREA DE SAÚDE Mariane Alves Gomes da Silva Eliana Zandonade 1. INTRODUÇÃO Um aspecto fundamental de um levantamento
DESENVOLVIMENTO DE UM SOFTWARE NA LINGUAGEM R PARA CÁLCULO DE TAMANHOS DE AMOSTRAS NA ÁREA DE SAÚDE Mariane Alves Gomes da Silva Eliana Zandonade 1. INTRODUÇÃO Um aspecto fundamental de um levantamento
Automação de Locais Distantes
 Automação de Locais Distantes Adaptação do texto Improving Automation at Remote Sites da GE Fanuc/ Water por Peter Sowmy e Márcia Campos, Gerentes de Contas da. Nova tecnologia reduz custos no tratamento
Automação de Locais Distantes Adaptação do texto Improving Automation at Remote Sites da GE Fanuc/ Water por Peter Sowmy e Márcia Campos, Gerentes de Contas da. Nova tecnologia reduz custos no tratamento
Conceitos ADMINISTRAÇÃO DE SISTEMAS DE INFORMAÇÃO. Comunicação; Formas de escritas; Processo de contagem primitivo;
 Conceitos Comunicação; Formas de escritas; Bacharel Rosélio Marcos Santana Processo de contagem primitivo; roseliomarcos@yahoo.com.br Inicio do primitivo processamento de dados do homem. ADMINISTRAÇÃO
Conceitos Comunicação; Formas de escritas; Bacharel Rosélio Marcos Santana Processo de contagem primitivo; roseliomarcos@yahoo.com.br Inicio do primitivo processamento de dados do homem. ADMINISTRAÇÃO
Curso de Computação Gráfica (CG) 2014/2- Unidade 1- Modelagem de objetos. Exercício 1 (individual) - Entrega: quarta 13/08
 2014/2- Unidade 1- Modelagem de objetos. Exercício 1 (individual) - Entrega: quarta 13/08") Curso de Computação Gráfica (CG) 2014/2- Unidade 1- Modelagem de objetos Exercício 1 (individual) - Entrega: quarta 13/08 Escolha um objeto entre os que possivelmente compõem uma clínica médica de exames
Curso de Computação Gráfica (CG) 2014/2- Unidade 1- Modelagem de objetos Exercício 1 (individual) - Entrega: quarta 13/08 Escolha um objeto entre os que possivelmente compõem uma clínica médica de exames
CHECK - LIST - ISO 9001:2000
 REQUISITOS ISO 9001: 2000 SIM NÃO 1.2 APLICAÇÃO A organização identificou as exclusões de itens da norma no seu manual da qualidade? As exclusões são relacionadas somente aos requisitos da sessão 7 da
REQUISITOS ISO 9001: 2000 SIM NÃO 1.2 APLICAÇÃO A organização identificou as exclusões de itens da norma no seu manual da qualidade? As exclusões são relacionadas somente aos requisitos da sessão 7 da
UML 2. Guia Prático. Gilleanes T.A. Guedes. Novatec. Obra revisada e ampliada a partir do título Guia de Consulta Rápida UML 2
 UML 2 Guia Prático Gilleanes T.A. Guedes Obra revisada e ampliada a partir do título Guia de Consulta Rápida UML 2 Novatec capítulo 1 Introdução à UML A UML (Unified Modeling Language ou Linguagem de Modelagem
UML 2 Guia Prático Gilleanes T.A. Guedes Obra revisada e ampliada a partir do título Guia de Consulta Rápida UML 2 Novatec capítulo 1 Introdução à UML A UML (Unified Modeling Language ou Linguagem de Modelagem
Manual do Usuário. Plano de Corte
 Manual do Usuário Plano de Corte Sumário Gigatron Plano de Corte...2 Versão...2 Plano de Corte...2 Edição de Atributos de Peças...3 Atributos de Linhas de Corte...4 Estilos de Entrada e Saída...8 Contorno...8
Manual do Usuário Plano de Corte Sumário Gigatron Plano de Corte...2 Versão...2 Plano de Corte...2 Edição de Atributos de Peças...3 Atributos de Linhas de Corte...4 Estilos de Entrada e Saída...8 Contorno...8
FATEC Cruzeiro José da Silva. Ferramenta CRM como estratégia de negócios
 FATEC Cruzeiro José da Silva Ferramenta CRM como estratégia de negócios Cruzeiro SP 2008 FATEC Cruzeiro José da Silva Ferramenta CRM como estratégia de negócios Projeto de trabalho de formatura como requisito
FATEC Cruzeiro José da Silva Ferramenta CRM como estratégia de negócios Cruzeiro SP 2008 FATEC Cruzeiro José da Silva Ferramenta CRM como estratégia de negócios Projeto de trabalho de formatura como requisito
Para construção dos modelos físicos, será estudado o modelo Relacional como originalmente proposto por Codd.
 Apresentação Este curso tem como objetivo, oferecer uma noção geral sobre a construção de sistemas de banco de dados. Para isto, é necessário estudar modelos para a construção de projetos lógicos de bancos
Apresentação Este curso tem como objetivo, oferecer uma noção geral sobre a construção de sistemas de banco de dados. Para isto, é necessário estudar modelos para a construção de projetos lógicos de bancos
- online Shaft Calculation
 - online Shaft Calculation O Eficiente Software de Cálculo do Grupo Schaeffler Além de fornecer componentes de alta qualidade para atender as aplicações de nossos clientes, o suporte técnico é uma importante
- online Shaft Calculation O Eficiente Software de Cálculo do Grupo Schaeffler Além de fornecer componentes de alta qualidade para atender as aplicações de nossos clientes, o suporte técnico é uma importante
ENGENHARIA DE SOFTWARE I
 ENGENHARIA DE SOFTWARE I Prof. Cássio Huggentobler de Costa [cassio.costa@ulbra.br] Twitter: www.twitter.com/cassiocosta_ Agenda da Aula (002) Metodologias de Desenvolvimento de Softwares Métodos Ágeis
ENGENHARIA DE SOFTWARE I Prof. Cássio Huggentobler de Costa [cassio.costa@ulbra.br] Twitter: www.twitter.com/cassiocosta_ Agenda da Aula (002) Metodologias de Desenvolvimento de Softwares Métodos Ágeis
Os caracteres de escrita
 III. Caracteres de Escrita Os caracteres de escrita ou letras técnicas são utilizadas em desenhos técnicos pelo simples fato de proporcionarem maior uniformidade e tornarem mais fácil a leitura. Se uma
III. Caracteres de Escrita Os caracteres de escrita ou letras técnicas são utilizadas em desenhos técnicos pelo simples fato de proporcionarem maior uniformidade e tornarem mais fácil a leitura. Se uma
APLICAÇÕES DA DERIVADA
 Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Os desenhos. Representação de desenhos
 Os desenhos 1 Os desenhos Tópicos: Representação de desenhos Edição gráfica bidimensional Representação de desenhos Formatos de desenhos: imagens Arranjos de pixels. Digitalização da imagem por papel,
Os desenhos 1 Os desenhos Tópicos: Representação de desenhos Edição gráfica bidimensional Representação de desenhos Formatos de desenhos: imagens Arranjos de pixels. Digitalização da imagem por papel,
10 DICAS DE TECNOLOGIA PARA AUMENTAR SUA PRODUTIVIDADE NO TRABALHO
 10 DICAS DE TECNOLOGIA PARA AUMENTAR SUA PRODUTIVIDADE NO TRABALHO UMA DAS GRANDES FUNÇÕES DA TECNOLOGIA É A DE FACILITAR A VIDA DO HOMEM, SEJA NA VIDA PESSOAL OU CORPORATIVA. ATRAVÉS DELA, ELE CONSEGUE
10 DICAS DE TECNOLOGIA PARA AUMENTAR SUA PRODUTIVIDADE NO TRABALHO UMA DAS GRANDES FUNÇÕES DA TECNOLOGIA É A DE FACILITAR A VIDA DO HOMEM, SEJA NA VIDA PESSOAL OU CORPORATIVA. ATRAVÉS DELA, ELE CONSEGUE
Objetivos. Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas e
 MÓDULO 2 - AULA 13 Aula 13 Superfícies regradas e de revolução Objetivos Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas
MÓDULO 2 - AULA 13 Aula 13 Superfícies regradas e de revolução Objetivos Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas
1 http://www.google.com
 1 Introdução A computação em grade se caracteriza pelo uso de recursos computacionais distribuídos em várias redes. Os diversos nós contribuem com capacidade de processamento, armazenamento de dados ou
1 Introdução A computação em grade se caracteriza pelo uso de recursos computacionais distribuídos em várias redes. Os diversos nós contribuem com capacidade de processamento, armazenamento de dados ou
INTRODUÇÃO ÀS LINGUAGENS DE PROGRAMAÇÃO
 Capítulo 1 INTRODUÇÃO ÀS LINGUAGENS DE PROGRAMAÇÃO 1.1 Histórico de Linguagens de Programação Para um computador executar uma dada tarefa é necessário que se informe a ele, de uma maneira clara, como ele
Capítulo 1 INTRODUÇÃO ÀS LINGUAGENS DE PROGRAMAÇÃO 1.1 Histórico de Linguagens de Programação Para um computador executar uma dada tarefa é necessário que se informe a ele, de uma maneira clara, como ele
Processos Técnicos - Aulas 4 e 5
 Processos Técnicos - Aulas 4 e 5 Trabalho / PEM Tema: Frameworks Públicos Grupo: equipe do TCC Entrega: versão digital, 1ª semana de Abril (de 31/03 a 04/04), no e-mail do professor (rodrigues.yuri@yahoo.com.br)
Processos Técnicos - Aulas 4 e 5 Trabalho / PEM Tema: Frameworks Públicos Grupo: equipe do TCC Entrega: versão digital, 1ª semana de Abril (de 31/03 a 04/04), no e-mail do professor (rodrigues.yuri@yahoo.com.br)
ANÁLISE DO PRODUTO NX CMM INSPECTION PROGRAMMING
 Análise do Produto Dr. Charles Clarke ANÁLISE DO PRODUTO NX CMM INSPECTION PROGRAMMING Tendências e requisitos do setor...3 Uma nova abordagem de programação de inspeção de CMM...4 O aplicativo na prática...5
Análise do Produto Dr. Charles Clarke ANÁLISE DO PRODUTO NX CMM INSPECTION PROGRAMMING Tendências e requisitos do setor...3 Uma nova abordagem de programação de inspeção de CMM...4 O aplicativo na prática...5
PLANEJAMENTO DA MANUFATURA
 58 FUNDIÇÃO e SERVIÇOS NOV. 2012 PLANEJAMENTO DA MANUFATURA Otimizando o planejamento de fundidos em uma linha de montagem de motores (II) O texto dá continuidade à análise do uso da simulação na otimização
58 FUNDIÇÃO e SERVIÇOS NOV. 2012 PLANEJAMENTO DA MANUFATURA Otimizando o planejamento de fundidos em uma linha de montagem de motores (II) O texto dá continuidade à análise do uso da simulação na otimização
27 Tolerância geométrica
 A U A UL LA Tolerância geométrica de posição Um problema Como se determina a tolerância de posição de peças conjugadas para que a montagem possa ser feita sem a necessidade de ajustes? Essa questão é abordada
A U A UL LA Tolerância geométrica de posição Um problema Como se determina a tolerância de posição de peças conjugadas para que a montagem possa ser feita sem a necessidade de ajustes? Essa questão é abordada
João Manuel R. S. Tavares / JOF
 Introdução ao Controlo Numérico Computorizado II Referencial, Trajectórias João Manuel R. S. Tavares / JOF Introdução As ferramentas de uma máquina CNC podem realizar certos movimentos conforme o tipo
Introdução ao Controlo Numérico Computorizado II Referencial, Trajectórias João Manuel R. S. Tavares / JOF Introdução As ferramentas de uma máquina CNC podem realizar certos movimentos conforme o tipo
Orientação a Objetos
 1. Domínio e Aplicação Orientação a Objetos Um domínio é composto pelas entidades, informações e processos relacionados a um determinado contexto. Uma aplicação pode ser desenvolvida para automatizar ou
1. Domínio e Aplicação Orientação a Objetos Um domínio é composto pelas entidades, informações e processos relacionados a um determinado contexto. Uma aplicação pode ser desenvolvida para automatizar ou
GUIA DE REDAÇÃO PARA TRABALHO DE EM974
 GUIA DE REDAÇÃO PARA TRABALHO DE EM974 CONSIDERAÇÕES GERAIS O objetivo deste documento é informar a estrutura e a informação esperadas num texto de Trabalho de Graduação. O conteúdo do texto deverá ser
GUIA DE REDAÇÃO PARA TRABALHO DE EM974 CONSIDERAÇÕES GERAIS O objetivo deste documento é informar a estrutura e a informação esperadas num texto de Trabalho de Graduação. O conteúdo do texto deverá ser
Roteiro para a escrita do documento de Especificação de Requisitos de Software (ERS)
") Roteiro para a escrita do documento de Especificação de Requisitos de Software (ERS) Definição Geral: Disciplina de Compiladores Prof. Jorge Bidarra (UNIOESTE) A especificação de requisitos tem como objetivo
Roteiro para a escrita do documento de Especificação de Requisitos de Software (ERS) Definição Geral: Disciplina de Compiladores Prof. Jorge Bidarra (UNIOESTE) A especificação de requisitos tem como objetivo
PROCESSO DE DESENVOLVIMENTO DE SOFTWARE. Modelos de Processo de Desenvolvimento de Software
 PROCESSO DE DESENVOLVIMENTO DE SOFTWARE Introdução Modelos de Processo de Desenvolvimento de Software Os modelos de processos de desenvolvimento de software surgiram pela necessidade de dar resposta às
PROCESSO DE DESENVOLVIMENTO DE SOFTWARE Introdução Modelos de Processo de Desenvolvimento de Software Os modelos de processos de desenvolvimento de software surgiram pela necessidade de dar resposta às
Projeto de Sistemas I
 Instituto Federal de Educação, Ciência e Tecnologia de São Paulo Projeto de Sistemas I Professora: Kelly de Paula Cunha E-mail:kellypcsoares@ifsp.edu.br Requisitos: base para todo projeto, definindo o
Instituto Federal de Educação, Ciência e Tecnologia de São Paulo Projeto de Sistemas I Professora: Kelly de Paula Cunha E-mail:kellypcsoares@ifsp.edu.br Requisitos: base para todo projeto, definindo o
Instalações Máquinas Equipamentos Pessoal de produção
 Fascículo 6 Arranjo físico e fluxo O arranjo físico (em inglês layout) de uma operação produtiva preocupa-se com o posicionamento dos recursos de transformação. Isto é, definir onde colocar: Instalações
Fascículo 6 Arranjo físico e fluxo O arranjo físico (em inglês layout) de uma operação produtiva preocupa-se com o posicionamento dos recursos de transformação. Isto é, definir onde colocar: Instalações
3. Arquitetura Básica do Computador
 3. Arquitetura Básica do Computador 3.1. Modelo de Von Neumann Dar-me-eis um grão de trigo pela primeira casa do tabuleiro; dois pela segunda, quatro pela terceira, oito pela quarta, e assim dobrando sucessivamente,
3. Arquitetura Básica do Computador 3.1. Modelo de Von Neumann Dar-me-eis um grão de trigo pela primeira casa do tabuleiro; dois pela segunda, quatro pela terceira, oito pela quarta, e assim dobrando sucessivamente,
Fundamentos de Sistemas Operacionais
 Fundamentos de Sistemas Operacionais Professor: João Fábio de Oliveira jfabio@amprnet.org.br (41) 9911-3030 Objetivo: Apresentar o que são os Sistemas Operacionais, seu funcionamento, o que eles fazem,
Fundamentos de Sistemas Operacionais Professor: João Fábio de Oliveira jfabio@amprnet.org.br (41) 9911-3030 Objetivo: Apresentar o que são os Sistemas Operacionais, seu funcionamento, o que eles fazem,
1.1. Organização de um Sistema Computacional
 1. INTRODUÇÃO 1.1. Organização de um Sistema Computacional Desde a antiguidade, o homem vem desenvolvendo dispositivos elétricoeletrônicos (hardware) que funciona com base em instruções e que são capazes
1. INTRODUÇÃO 1.1. Organização de um Sistema Computacional Desde a antiguidade, o homem vem desenvolvendo dispositivos elétricoeletrônicos (hardware) que funciona com base em instruções e que são capazes
Introdução à ISO 9001:2015
 Trilhando o caminho das mudanças da nova versão Clique aqui para para conhecer-me. Introdução à ISO 9001:2015 Apresentar e interpretar As mudanças da norma versão da ABNT ISO 9001:2015 em relação à ABNT
Trilhando o caminho das mudanças da nova versão Clique aqui para para conhecer-me. Introdução à ISO 9001:2015 Apresentar e interpretar As mudanças da norma versão da ABNT ISO 9001:2015 em relação à ABNT
Universidade Federal do Rio de Janeiro. Nome:Daniel Oliveira de Lima Paper: Real-Time Shaded NC milling Display Tim Vam Hook - SIGGRAPH 86
 Universidade Federal do Rio de Janeiro Nome:Daniel Oliveira de Lima Paper: Real-Time Shaded NC milling Display Tim Vam Hook - SIGGRAPH 86 SIMULAÇÃO DE USINAGEM EM TEMPO REAL Motivação Problema Considerações
Universidade Federal do Rio de Janeiro Nome:Daniel Oliveira de Lima Paper: Real-Time Shaded NC milling Display Tim Vam Hook - SIGGRAPH 86 SIMULAÇÃO DE USINAGEM EM TEMPO REAL Motivação Problema Considerações
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
Módulo 4. Construindo uma solução OLAP
 Módulo 4. Construindo uma solução OLAP Objetivos Diferenciar as diversas formas de armazenamento Compreender o que é e como definir a porcentagem de agregação Conhecer a possibilidade da utilização de
Módulo 4. Construindo uma solução OLAP Objetivos Diferenciar as diversas formas de armazenamento Compreender o que é e como definir a porcentagem de agregação Conhecer a possibilidade da utilização de
Módulo 15 Resumo. Módulo I Cultura da Informação
 Módulo 15 Resumo Neste módulo vamos dar uma explanação geral sobre os pontos que foram trabalhados ao longo desta disciplina. Os pontos abordados nesta disciplina foram: Fundamentos teóricos de sistemas
Módulo 15 Resumo Neste módulo vamos dar uma explanação geral sobre os pontos que foram trabalhados ao longo desta disciplina. Os pontos abordados nesta disciplina foram: Fundamentos teóricos de sistemas
CAP. I ERROS EM CÁLCULO NUMÉRICO
 CAP. I ERROS EM CÁLCULO NUMÉRICO 0. Introdução Por método numérico entende-se um método para calcular a solução de um problema realizando apenas uma sequência finita de operações aritméticas. A obtenção
CAP. I ERROS EM CÁLCULO NUMÉRICO 0. Introdução Por método numérico entende-se um método para calcular a solução de um problema realizando apenas uma sequência finita de operações aritméticas. A obtenção
agility made possible
 RESUMO DA SOLUÇÃO Utilitário ConfigXpress no CA IdentityMinder a minha solução de gerenciamento de identidades pode se adaptar rapidamente aos requisitos e processos de negócio em constante mudança? agility
RESUMO DA SOLUÇÃO Utilitário ConfigXpress no CA IdentityMinder a minha solução de gerenciamento de identidades pode se adaptar rapidamente aos requisitos e processos de negócio em constante mudança? agility
Simulação Computacional de Sistemas, ou simplesmente Simulação
 Simulação Computacional de Sistemas, ou simplesmente Simulação Utilização de métodos matemáticos & estatísticos em programas computacionais visando imitar o comportamento de algum processo do mundo real.
Simulação Computacional de Sistemas, ou simplesmente Simulação Utilização de métodos matemáticos & estatísticos em programas computacionais visando imitar o comportamento de algum processo do mundo real.
Prof. Marcos Ribeiro Quinet de Andrade Universidade Federal Fluminense - UFF Pólo Universitário de Rio das Ostras - PURO
 Conceitos básicos e serviços do Sistema Operacional Prof. Marcos Ribeiro Quinet de Andrade Universidade Federal Fluminense - UFF Pólo Universitário de Rio das Ostras - PURO Tipos de serviço do S.O. O S.O.
Conceitos básicos e serviços do Sistema Operacional Prof. Marcos Ribeiro Quinet de Andrade Universidade Federal Fluminense - UFF Pólo Universitário de Rio das Ostras - PURO Tipos de serviço do S.O. O S.O.
Gerenciamento de Projetos Modulo II Ciclo de Vida e Organização do Projeto
 Gerenciamento de Projetos Modulo II Ciclo de Vida e Organização do Projeto Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com PMBoK Organização do Projeto Os projetos e o gerenciamento
Gerenciamento de Projetos Modulo II Ciclo de Vida e Organização do Projeto Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com PMBoK Organização do Projeto Os projetos e o gerenciamento
Fábrica de Software 29/04/2015
 Fábrica de Software 29/04/2015 Crise do Software Fábrica de Software Analogias costumam ser usadas para tentar entender melhor algo ou alguma coisa. A idéia é simples: compara-se o conceito que não se
Fábrica de Software 29/04/2015 Crise do Software Fábrica de Software Analogias costumam ser usadas para tentar entender melhor algo ou alguma coisa. A idéia é simples: compara-se o conceito que não se
)HUUDPHQWDV &RPSXWDFLRQDLV SDUD 6LPXODomR
HUUDPHQWDV &RPSXWDFLRQDLV SDUD 6LPXODomR") 6LPXODomR GH6LVWHPDV )HUUDPHQWDV &RPSXWDFLRQDLV SDUD 6LPXODomR #5,6. Simulador voltado para análise de risco financeiro 3RQWRV IRUWHV Fácil de usar. Funciona integrado a ferramentas já bastante conhecidas,
6LPXODomR GH6LVWHPDV )HUUDPHQWDV &RPSXWDFLRQDLV SDUD 6LPXODomR #5,6. Simulador voltado para análise de risco financeiro 3RQWRV IRUWHV Fácil de usar. Funciona integrado a ferramentas já bastante conhecidas,
Algoritmos e Programação (Prática) Profa. Andreza Leite andreza.leite@univasf.edu.br
 Profa. Andreza Leite andreza.leite@univasf.edu.br") (Prática) Profa. Andreza Leite andreza.leite@univasf.edu.br Introdução O computador como ferramenta indispensável: Faz parte das nossas vidas; Por si só não faz nada de útil; Grande capacidade de resolução
(Prática) Profa. Andreza Leite andreza.leite@univasf.edu.br Introdução O computador como ferramenta indispensável: Faz parte das nossas vidas; Por si só não faz nada de útil; Grande capacidade de resolução
PROCESSOS A CNC. Objetivo da disciplina Cronograma O projeto Critérios de avaliação Contrato didático A máquina O Comando eletrônico
 PROCESSOS A CNC Objetivo da disciplina Cronograma O projeto Critérios de avaliação Contrato didático A máquina O Comando eletrônico 1 CFP SENAI VW OBJETIVO da disciplina PROCESSOS A CNC Exercício básico
PROCESSOS A CNC Objetivo da disciplina Cronograma O projeto Critérios de avaliação Contrato didático A máquina O Comando eletrônico 1 CFP SENAI VW OBJETIVO da disciplina PROCESSOS A CNC Exercício básico
Guia de recomendações para implementação de PLM em PME s
 1 Guia de recomendações para implementação de PLM em PME s RESUMO EXECUTIVO Este documento visa informar, de uma forma simples e prática, sobre o que é a gestão do ciclo de vida do Produto (PLM) e quais
1 Guia de recomendações para implementação de PLM em PME s RESUMO EXECUTIVO Este documento visa informar, de uma forma simples e prática, sobre o que é a gestão do ciclo de vida do Produto (PLM) e quais
Everson Scherrer Borges João Paulo de Brito Gonçalves
 Everson Scherrer Borges João Paulo de Brito Gonçalves 1 Tipos de Sistemas Operacionais Os tipos de sistemas operacionais e sua evolução estão relacionados diretamente com a evolução do hardware e das
Everson Scherrer Borges João Paulo de Brito Gonçalves 1 Tipos de Sistemas Operacionais Os tipos de sistemas operacionais e sua evolução estão relacionados diretamente com a evolução do hardware e das
Feature-Driven Development
 FDD Feature-Driven Development Descrição dos Processos Requisitos Concepção e Planejamento Mais forma que conteúdo Desenvolver um Modelo Abrangente Construir a Lista de Features Planejar por
FDD Feature-Driven Development Descrição dos Processos Requisitos Concepção e Planejamento Mais forma que conteúdo Desenvolver um Modelo Abrangente Construir a Lista de Features Planejar por
Bacharelado em Ciência e Tecnologia Bacharelado em Ciências e Humanidades. Representação Gráfica de Funções
 Bacharelado em Ciência e Tecnologia Bacharelado em Ciências e Humanidades BC 0005 Bases Computacionais da Ciência Representação Gráfica de Funções Prof a Maria das Graças Bruno Marietto graca.marietto@ufabc.edu.br
Bacharelado em Ciência e Tecnologia Bacharelado em Ciências e Humanidades BC 0005 Bases Computacionais da Ciência Representação Gráfica de Funções Prof a Maria das Graças Bruno Marietto graca.marietto@ufabc.edu.br
FUNDAMENTOS DE SISTEMAS DE INFORMAÇÃO
 FUNDAMENTOS DE SISTEMAS DE Rafael D. Ribeiro, M.Sc,PMP. rafaeldiasribeiro@gmail.com http://www.rafaeldiasribeiro.com.br Princípios da Teoria de Sistemas 1 Grupos diferentes dentro de uma organização necessitam
FUNDAMENTOS DE SISTEMAS DE Rafael D. Ribeiro, M.Sc,PMP. rafaeldiasribeiro@gmail.com http://www.rafaeldiasribeiro.com.br Princípios da Teoria de Sistemas 1 Grupos diferentes dentro de uma organização necessitam
Dadas a base e a altura de um triangulo, determinar sua área.
 Disciplina Lógica de Programação Visual Ana Rita Dutra dos Santos Especialista em Novas Tecnologias aplicadas a Educação Mestranda em Informática aplicada a Educação ana.santos@qi.edu.br Conceitos Preliminares
Disciplina Lógica de Programação Visual Ana Rita Dutra dos Santos Especialista em Novas Tecnologias aplicadas a Educação Mestranda em Informática aplicada a Educação ana.santos@qi.edu.br Conceitos Preliminares
Conceitos de Banco de Dados
 Conceitos de Banco de Dados Autor: Luiz Antonio Junior 1 INTRODUÇÃO Objetivos Introduzir conceitos básicos de Modelo de dados Introduzir conceitos básicos de Banco de dados Capacitar o aluno a construir
Conceitos de Banco de Dados Autor: Luiz Antonio Junior 1 INTRODUÇÃO Objetivos Introduzir conceitos básicos de Modelo de dados Introduzir conceitos básicos de Banco de dados Capacitar o aluno a construir
ENQUALAB 2013 QUALIDADE & CONFIABILIDADE NA METROLOGIA AUTOMOTIVA. Elaboração em planos de Calibração Interna na Indústria Automotiva
 ENQUALAB 2013 QUALIDADE & CONFIABILIDADE NA METROLOGIA AUTOMOTIVA Elaboração em planos de Calibração Interna na Indústria Automotiva Joel Alves da Silva, Diretor Técnico JAS-METRO Soluções e Treinamentos
ENQUALAB 2013 QUALIDADE & CONFIABILIDADE NA METROLOGIA AUTOMOTIVA Elaboração em planos de Calibração Interna na Indústria Automotiva Joel Alves da Silva, Diretor Técnico JAS-METRO Soluções e Treinamentos
INTRODUÇÃO À PROGRAMAÇÃO BCC 201 TURMAS 31, 32 E 33 2015-2 AULA TEÓRICA 2 PROF. MARCELO LUIZ SILVA (R E D)
") Universidade Federal de Ouro Preto - UFOP Instituto de Ciências Exatas e Biológicas - ICEB Departamento de Computação - DECOM INTRODUÇÃO À PROGRAMAÇÃO BCC 201 TURMAS 31, 32 E 33 2015-2 1 AULA TEÓRICA 2
Universidade Federal de Ouro Preto - UFOP Instituto de Ciências Exatas e Biológicas - ICEB Departamento de Computação - DECOM INTRODUÇÃO À PROGRAMAÇÃO BCC 201 TURMAS 31, 32 E 33 2015-2 1 AULA TEÓRICA 2
PROJETO DE OPERAÇÕES DE USINAGEM
 Tarefas Envolvidas no Projeto de Operações de Usinagem: Planejamento do roteamento operações para fabricar uma peça ordem lógica Instruções suficientemente detalhadas para execução da usinagem? Projeto
Tarefas Envolvidas no Projeto de Operações de Usinagem: Planejamento do roteamento operações para fabricar uma peça ordem lógica Instruções suficientemente detalhadas para execução da usinagem? Projeto
APLICATIVOS GRÁFICOS (AULA 3)
") Prof. Breno Leonardo G. de M. Araújo brenod123@gmail.com http://blog.brenoleonardo.com.br APLICATIVOS GRÁFICOS (AULA 3) Introdução A possibilidade de utilizarmos imagens, gráficos, desenhos e textos artísticos
Prof. Breno Leonardo G. de M. Araújo brenod123@gmail.com http://blog.brenoleonardo.com.br APLICATIVOS GRÁFICOS (AULA 3) Introdução A possibilidade de utilizarmos imagens, gráficos, desenhos e textos artísticos
Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3
 Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3 A LEGO Education tem o prazer de trazer até você a edição para tablet do Software LEGO MINDSTORMS Education EV3 - um jeito divertido
Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3 A LEGO Education tem o prazer de trazer até você a edição para tablet do Software LEGO MINDSTORMS Education EV3 - um jeito divertido
Sistemas de Gestão da Qualidade. Introdução. Engenharia de Produção Gestão Estratégica da Qualidade. Tema Sistemas de Gestão da Qualidade
 Tema Sistemas de Gestão da Qualidade Projeto Curso Disciplina Tema Professor Pós-graduação Engenharia de Produção Gestão Estratégica da Qualidade Sistemas de Gestão da Qualidade Elton Ivan Schneider Introdução
Tema Sistemas de Gestão da Qualidade Projeto Curso Disciplina Tema Professor Pós-graduação Engenharia de Produção Gestão Estratégica da Qualidade Sistemas de Gestão da Qualidade Elton Ivan Schneider Introdução
Aula 2 Revisão 1. Ciclo de Vida. Processo de Desenvolvimento de SW. Processo de Desenvolvimento de SW. Processo de Desenvolvimento de SW
 Ciclo de Vida Aula 2 Revisão 1 Processo de Desenvolvimento de Software 1 O Processo de desenvolvimento de software é um conjunto de atividades, parcialmente ordenadas, com a finalidade de obter um produto
Ciclo de Vida Aula 2 Revisão 1 Processo de Desenvolvimento de Software 1 O Processo de desenvolvimento de software é um conjunto de atividades, parcialmente ordenadas, com a finalidade de obter um produto
Pós-Graduação em Gerenciamento de Projetos práticas do PMI
 Pós-Graduação em Gerenciamento de Projetos práticas do PMI Planejamento do Gerenciamento das Comunicações (10) e das Partes Interessadas (13) PLANEJAMENTO 2 PLANEJAMENTO Sem 1 Sem 2 Sem 3 Sem 4 Sem 5 ABRIL
Pós-Graduação em Gerenciamento de Projetos práticas do PMI Planejamento do Gerenciamento das Comunicações (10) e das Partes Interessadas (13) PLANEJAMENTO 2 PLANEJAMENTO Sem 1 Sem 2 Sem 3 Sem 4 Sem 5 ABRIL
Principais funções de movimento em analisadores médicos.
 Movimento em analisadores médicos Menor, mais rápido, mais forte. Como os motores em miniatura estão ajudando os equipamentos de diagnóstico a avançar. Os diagnósticos médicos fazem parte da vida cotidiana
Movimento em analisadores médicos Menor, mais rápido, mais forte. Como os motores em miniatura estão ajudando os equipamentos de diagnóstico a avançar. Os diagnósticos médicos fazem parte da vida cotidiana
MÓDULO 7 Modelo OSI. 7.1 Serviços Versus Protocolos
 MÓDULO 7 Modelo OSI A maioria das redes são organizadas como pilhas ou níveis de camadas, umas sobre as outras, sendo feito com o intuito de reduzir a complexidade do projeto da rede. O objetivo de cada
MÓDULO 7 Modelo OSI A maioria das redes são organizadas como pilhas ou níveis de camadas, umas sobre as outras, sendo feito com o intuito de reduzir a complexidade do projeto da rede. O objetivo de cada
SOLIDWORKS PEÇAS E MONTAGENS - 40 horas
 SOLIDWORKS PEÇAS E MONTAGENS - 40 horas Segunda, Quarta e Sexta: 11/05 a 01/06/2009. Noite: 18:30 às 22:30 horas. Sábado: 23/05 a 20/06/2009. Integral: 08:00 ás 12:00-13:00 ás 17:00 horas. Introdução a
SOLIDWORKS PEÇAS E MONTAGENS - 40 horas Segunda, Quarta e Sexta: 11/05 a 01/06/2009. Noite: 18:30 às 22:30 horas. Sábado: 23/05 a 20/06/2009. Integral: 08:00 ás 12:00-13:00 ás 17:00 horas. Introdução a
Introdução. Hardware X Software. Corpo Humano Parte Física. Capacidade de utilizar o corpo em atividades especificas explorando seus componentes
 Introdução Hardware X Software Corpo Humano Parte Física Componentes 18 Capacidade de utilizar o corpo em atividades especificas explorando seus componentes Hardware Introdução Parte física: placas, periféricos,
Introdução Hardware X Software Corpo Humano Parte Física Componentes 18 Capacidade de utilizar o corpo em atividades especificas explorando seus componentes Hardware Introdução Parte física: placas, periféricos,
CorelDRAW 11 1. UM PROGRAMA DE DESIGN
 CorelDRAW 11 1. UM PROGRAMA DE DESIGN Com o Corel você vai trabalhar com um dos aplicativos mais usados no campo do design e da auto-edição, já que permite operar com dois tipos de gráficos (vetoriais
CorelDRAW 11 1. UM PROGRAMA DE DESIGN Com o Corel você vai trabalhar com um dos aplicativos mais usados no campo do design e da auto-edição, já que permite operar com dois tipos de gráficos (vetoriais
Metodologias de Desenvolvimento de Sistemas. Analise de Sistemas I UNIPAC Rodrigo Videschi
 Metodologias de Desenvolvimento de Sistemas Analise de Sistemas I UNIPAC Rodrigo Videschi Histórico Uso de Metodologias Histórico Uso de Metodologias Era da Pré-Metodologia 1960-1970 Era da Metodologia
Metodologias de Desenvolvimento de Sistemas Analise de Sistemas I UNIPAC Rodrigo Videschi Histórico Uso de Metodologias Histórico Uso de Metodologias Era da Pré-Metodologia 1960-1970 Era da Metodologia
Tabela de Símbolos. Análise Semântica A Tabela de Símbolos. Principais Operações. Estrutura da Tabela de Símbolos. Declarações 11/6/2008
 Tabela de Símbolos Análise Semântica A Tabela de Símbolos Fabiano Baldo Após a árvore de derivação, a tabela de símbolos é o principal atributo herdado em um compilador. É possível, mas não necessário,
Tabela de Símbolos Análise Semântica A Tabela de Símbolos Fabiano Baldo Após a árvore de derivação, a tabela de símbolos é o principal atributo herdado em um compilador. É possível, mas não necessário,