SEL-0339 Introdução à Visão Computacional. Aula 6 Representação e Descrição
|
|
|
- Raphael Anjos Fontes
- 6 Há anos
- Visualizações:
Transcrição
1 Departamento de Engenaria Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 6 Representação e Descrição Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br




2 Dados Geométricos 3D Computação Gráfica Imagem D Imagem D Processamento de imagens Imagem D Imagem D Visão Computacional Dados Geométricos 3D Visão Computacional - Aula1


3 Visão Computacional Imagem Digital Processamento de Imagem Extração/ Seleção de Características Reconecimento LENNA 3





4 4
5 Introdução q Após a segmentação, os agrupamentos resultantes são usualmente representados por meio de dados em um formato apropriado camados de descritores. Representação Fronteiras: Características externas. forma do objeto Foco na Regiões: Características internas. Foco na textura ou cor do objeto q Uma fronteira pode ser descrita pelo seu tamano, orientação, número de concavidades, etc... q Uma região pode ser descrita pela sua cor, textura, área, etc... q Os descritores devem ser insensíveis à translação, rotação e mudança de escala 5
6 Representação de Fronteiras
7 Representação de Fronteiras 1) Seguidor de fronteira Define uma sequência ordenada de pontos que descrevem uma fronteira. Para imagens binárias com a fronteira segmentada. Representação 1-D de uma forma bidimensional em uma imagem
8 Algoritmo: 1. Considere o ponto de partida b 0 como o ponto mais alto e mais a esquerda rotulado com valor 1 (objeto);. Denote por c 0 o vizino à esquerda (ponto de fundo); 3. Examine todos os vizinos-8 do ponto b 0 a partir de c 0 considerando o sentido orário e marque o primeiro ponto rotulado com 1 que for encontrado.
9 Algoritmo: 4. Inclua as coordenadas desse ponto na sequência como b 1. Ele faz parte da fronteira do objeto; 5. Denote por c 1 o ponto imediatamente anterior ao ponto b 1 encontrado na sequência (ponto de fundo); 6. Repita o passo 3 a 5 até que o ponto encontrado seja novamente b 0.
10 ) Código da Cadeia: ( Cain Code ou Código de Freeman) q Representam uma fronteira através de uma sequência conectada de segmentos, de direção e comprimento definidos. Código de 4 direções Código de 8 direções 10
11 Exemplo: Código de 4 direções: Cain Code 11
12 q Se a representação da fronteira for feita a cada par de pixels o custo computacional do algoritmo é alto e o torna mais susceptível a ruídos. Ruído 1


13 q Deve-se reamostrar a fronteira através de uma grade de amostragem de tamano maior. q Então, conforme a fronteira é percorrida, um ponto na fronteira é atribuído a cada nó da grade em função da sua proximidade. q O código de cadeia deve ser calculado para a fronteira reamostrada.
14 Imagem Origem Código de 4 direções: Grade de reamostragem Origem Código de 8 direções:


15 Exemplo: 15
16 Normalização do Código da Cadeia: q O Código da Cadeia de uma dada fronteira depende de uma origem. q A solução é normalizar o código para que independa da origem. Primeira Diferença ou Derivativo do Código da Cadeia: Invariante com relação à Rotação 16
17 17 Primeira Diferença ou Derivativo do Código da Cadeia: Método: 1. Considerar o Código da Cadeia de forma circular, ou seja, fecado em suas extremidades.. Montar o Código Derivativo de acordo com a distância no sentido anti-orário: p p p p p p p p 4 direções
18 Exemplo: Código da Cadeia: p Código Derivativo:
19 Exemplo: p 3 - p 1 Virar à Direita 90 o Virar à Esquerda 90 o Direção arbitrária ( 3 ) 19
20 0 Código Derivativo de 8 Direções: p p p p p p 4) 3)(7 )(6 1)(5 0)(4 7)(3 6)( 5)(1 (0 5 5) 4)(7 3)(6 )(5 1)(4 0)(3 7)( 6)(1 (0 6 6) 5)(7 4)(6 3)(5 )(4 1)(3 0)( 7)(1 (0 7 ) 1)(7 0)(6 7)(5 6)(4 5)(3 4)( 3)(1 (0 3 1) 0)(7 7)(6 6)(5 5)(4 4)(3 3)( )(1 (0 0) 7)(7 6)(6 5)(5 4)(4 3)(3 )( 1)(1 (0 1 7) 6)(7 5)(6 4)(5 3)(4 )(3 1)( 0)(1 (0 0 Sentido anti-orário
21 0 (0 0)(1 1)( )(3 3)(4 4)(5 5)(6 6)(7 7) 1 (0 1)(1 )( 3)(3 4)(4 5)(5 6)(6 7)(7 0) (0 )(1 3)( 4)(3 5)(4 6)(5 7)(6 0)(7 1) 3 (0 3)(1 4)( 5)(3 6)(4 7)(5 0)(6 1)(7 ) 7 (0 7)(1 0)( 1)(3 )(4 3)(5 4)(6 5)(7 6) 6 (0 6)(1 7)( 0)(3 1)(4 )(5 3)(6 4)(7 5) 5 (0 5)(1 6)( 7)(3 0)(4 1)(5 )(6 3)(7 4) Código da Cadeia: Código Derivativo:

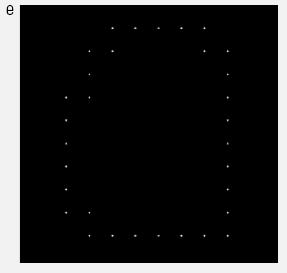
22 3) Aproximações Poligonais: Uma fronteira pode ser aproximada por um polígono. Para uma fronteira fecada, a aproximação é exata quando o número de segmentos do polígono é igual ao número de pontos da fronteira. O objetivo da aproximação poligonal é capturar o formato da fronteira utilizando o menor número possível de segmentos.

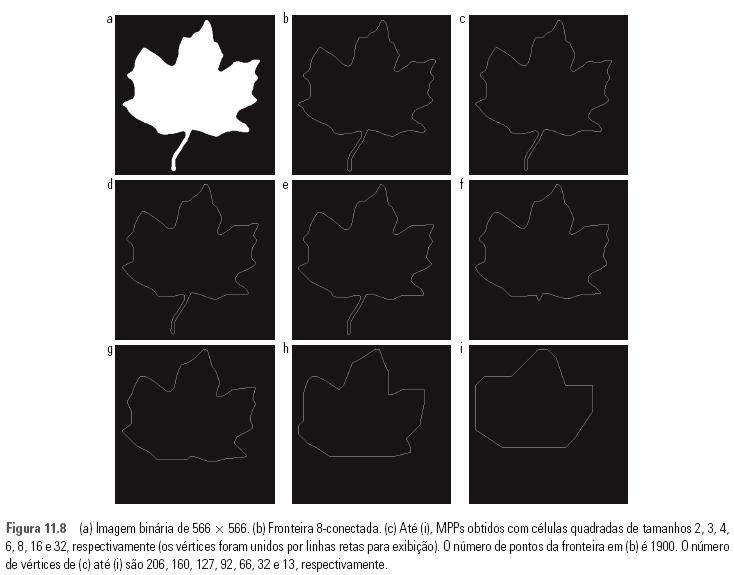
23 Polígono de perímetro mínimo Cercar a fronteira por um conjunto de células concatenadas de tamano definido (esse tamano define a precisão da aproximação). O polígono é definido como se fosse um elástico que se encole e contorna a fronteira encontrando seus limites nos cantos interiores e exteriores da região delimitada pelas células.
24 Polígono de perímetro mínimo Define-se a região interna do conjunto de células concatenadas utilizando vizinança-4 (cinza-escuro). Deve-se rotular cada vértice do polígono interno em côncavo (preto) ou convexo (branco); Um vértice convexo é o ponto central de um trio de pontos que definem um ângulo na faixa de 0 <θ<180 e um vértice côncavo tem um ângulo na faixa de 180 <θ<360.
, desprezando-se os vértices brancos que estão entre")
25 Polígono de perímetro mínimo Todos os vértices côncavos devem ser espelados considerando a diagonal oposta da célula externa da região. O polígono de perímetro mínimo é formado ligando-se os vértices encontrados (convexo e côncavo espelado), desprezando-se os vértices brancos que estão entre dois vértices pretos.
26 A orientação de um trio de pontos (a,b,c) com coordenadas (x 1,y 1 ), (x,y ), (x 3,y 3 ), respectivamente, pode ser calculado considerando-se a matriz abaixo: Como saber se um ponto é convexo ou côncavo? ú ú ú û ù ê ê ê ë é y x y x y x A ï þ ï ý ü ï î ï í ì < > Convexo Colineares Côncavo A ) det(
27 Exemplo:
28 Inscrição de Polígono Convexo: Fronteira Original Convexa Determinar os dois pontos mais distantes da fronteira ( a e b ); A forma foi subdividida em duas regiões; Determinar os pontos de maior distância perpendicular ao segmento a-b para as regiões superior e inferior (c e d); 8
29 Inscrição de Polígono Convexo: Inscrever o Polígono através da união dos pontos da fronteira determinados (a,b,c,d) Estabelecer um nível de Limiar para a distância perpendicular para definir o número de pontos do polígono. A Fronteira é então descrita através dos pontos que formam os vértices do Polígono inscrito ( a,b,c,d,...) 9
30 4) Assinaturas: q Representação unidimensional de uma fronteira em coordenadas polares. Exemplos: 1) Gráfico da Distância do centro de massa versus Ângulo: 30
31 Coordenadas Polares: y "' '-----'----x [X, Y] poicart(theta, RHO) coordinates. Te syntax is [THETA, RHO] cartpol(x, Y) 31

32 Exemplo: 3
33 Descritores de Fronteiras 1) Comprimento da Fronteira (Perímetro): Contagem do número de pixels da Fronteira. q Usando o Código da Cadeia: de 4 direções Número de elementos. de 8 direções Número de elementos pares (orizontais e verticais) mais x (número de elementos ímpares) elementos diagonais. 33
![) Diâmetro da Fronteira: Diam ( B) max i, j [ D( p, p )] i j Onde: D p i, p ) ( j É a distância entre os píxels i e j sobre a Fronteira B.](/docs-images/77/74912063/images/34-0.jpg "q O valor do Diâmetro e a orientação da lina que conecta os dois pontos da fronteira mais distantes são descritores úteis da fronteira.")
34 ) Diâmetro da Fronteira: Diam ( B) max i, j [ D( p, p )] i j Onde: D p i, p ) ( j É a distância entre os píxels i e j sobre a Fronteira B. q O valor do Diâmetro e a orientação da lina que conecta os dois pontos da fronteira mais distantes são descritores úteis da fronteira. q Esta lina é também camada de Eixo Maior da fronteira. 34
35 3) Excentricidade da Fronteira: q É a razão entre o Eixo Maior (D) e o Eixo Menor (d) da fronteira. D E d q Eixo Menor é a maior distância entre dois pontos da fronteira B sobre uma perpendicular ao Eixo Maior. 35
36 4) Número do Formato: ( Sape Numbers ) q Utilizando o Código da Cadeia de 4 direções, o Número do Formato da fronteira é definido como o menor número formado pela primeira diferença (Código Derivativo) através da Rotação do Derivativo. q A Ordem n do Número do Formato é definida como o número de dígitos para representá-lo. n é par para fronteiras fecadas Código da Cadeia: Derivativo: Número do Formato: 36
37 Código da Cadeia: Derivativo: Número do Formato: Código da Cadeia: Derivativo: Número do Formato: Código da Cadeia: Derivativo: Número do Formato: Código da Cadeia: Derivativo: Número do Formato: 37
38 Geração do Número do Formato: 1. Dada a Fronteira que se quer determinar seu Número do Formato, localizar o Eixo Maior e o Eixo Menor.. Definir o Retângulo Básico que envolve a fronteira, baseado nos dois eixos localizados. 38
39 3. Aproximar o retângulo que envolve a fronteira através de um retângulo cuja Excentricidade (E) melor aproxima a do Retângulo Básico. Exemplo: Supondo-se que a excentricidade medida foi E. O Retângulo 3 x 6 foi escolido pois possui excentricidade E. O polígono tem ordem 18, ou seja, o código da Cadeia terá 18 elementos. 1 x 8 E8 x 7 E3.5 3 x 6 E 4 x 5 E1,5 39
40 4. Alinar a direção do Código da Cadeia com a grade resultante e gerar os códigos e o Número do Formato equivalentes à fronteira. Código da Cadeia: Derivativo: Número do Formato:
41 6) Descritores de Fourier: A sequência de coordenadas de uma fronteira percorrida no sentido orário pode ser representada utilizando números complexos, com as coordenadas x no eixo real e a coordenadas y no eixo imaginário: Reduz a representação -D para 1-D. s x + i i jy i 41
42 6) Descritores de Fourier: Aplicando a transformada de Fourier na sequência determinada, temos os descritores de Fourier da fronteira; A transformada inversa desses coeficientes reconstrói a fronteira. Ao invés de usarmos todos os coeficientes na transformada inversa, pode-se obter uma fronteira aproximada (reduzir os detales da forma) utilizando-se apenas alguns coeficientes de Fourier (utiliza-se um filtro passa baixa). Os componentes de alta frequência são responsáveis pelos detales finais da imagem e os de baixa frequência determinam a forma global da imagem. Quanto menor a frequência de corte, mais detales são perdidos mas menos descritores são utilizados para descrever a fronteira. 4

43 Exemplo: 43
44 Representação de Regiões
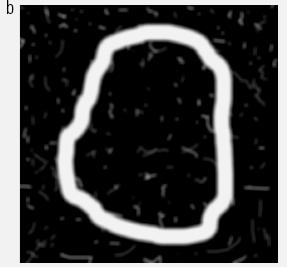
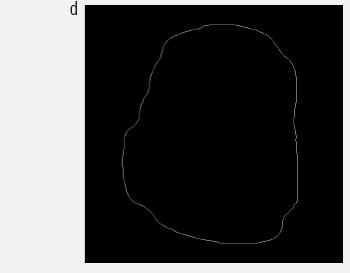
45 Representação de Regiões 1) Esqueleto de uma Região: q Redução de uma região ao seu esqueleto, através de um algoritmo de afinamento ou esqueletização. q O esqueleto de uma região pode ser definido pela Transformação do Eixo Médio ( Medial Axis Transform - MAT). q A MAT de uma região R com borda B é definida da seguinte forma: Para cada ponto p em R, encontramos seu vizino mais próximo em B. Se p tiver mais de um vizino desse tipo, então diz-se que ele pertence ao eixo médio (esqueleto) de R. Esqueleto Região R Borda B 45
46 Exemplo: Esqueleto de regiões considerando a Distância Euclidiana. Os pontos do Esqueleto possuem pelo menos dois pontos em B de mesma Distância Euclidiana. 46

47 Exemplo: 47
48 Descritores de Regiões 1) Área de uma Região (A): A Número de pixels contido dentro de sua fronteira. ) Compacidade: C P A Onde P Perímetro da fronteira e A Área da Região q A Compacidade é adimensional e insensível a mudanças de escala e orientação. 48


49 3) Descritores Topológicos: q Úteis para descrições globais no plano de Imagem. q Topologia é o estudo das propriedades de uma figura que não sejam afetadas por deformações, desde que não existam divisão ou fusão da figura. Número de Furos: Número de Componentes conectados: Região com furos Região com 3 componentes conectados 49
50 Número de Euler: E C - H Onde: C número de componentes Conectados H número de furos E 0 E -1 50

51 4) Descritores de Textura: Fornece medidas de propriedades da imagem como suavidade, rugosidade e regularidade. 51
52 Abordagem Estatística: Baseada em istograma Mean Moment L 1 Expression rn I z;p(z;) ;0 Standard deviation a J;;.j;;z Smootness R 1-1/(1 + ( ) Tird moment Uniformity Entropy L - l P,3 L (Z; - m)3 p(zj io L - l U L p(zj ; 0 L - l e - I p(z;)log p(z;) ; 0 Measure of Texture A measure of average intensity. A measure of average contrast. Measures te relative smootness of te intensity in a region. R is 0 for a region of constant intensity and approaces 1 for regions wit large excursions in te values of its intensity levels. In practice, te variance, a, used in tis measure is normalized to te range [0,1] by dividing it by (L-1f Measures te skewness of a istogram. Tis measure is 0 for symmetric istograms; positive by istograms skewed to te rigt about te mean; and negative for istograms skewed to te left. Values of tis measure are brougt into a range of values comparable to te oter five measures by dividing f.l3 by (L -1), te same divisor we used to normalize te variance. Measures uniformity. Tis measure is maximum wen all intensity values are equal (maximally uniform) and decreases from tere. A measure of randomness. Alguns descritores de textura baseados no istograma de uma região. Z i à Intensidade dos pixels P(z) àhistograma das intensidades L à número dos possíveis níveis de cinza 5


53 Exemplo de valores de textura em diferentes imagens 53
54 5) Momentos: q O momento de ordem (p+q) de uma função contínua bi-dimensional é definido como: m p q x y f x, y dx dy ò ò pq ) - - ( para p,q 0,1,,... m x y f ( x, y) dx dy f ( x, y) dx dy ò ò - - ò ò - - m 00 área da Região 54
55 m x y f ( x, y) dx dy y f ( x, y) dx dy ò ò - - ò ò - - m x y f ( x, y) dx dy x f ( x, y) dx dy ò ò - - ò ò - - m 01 e m 10 são as coordenadas do Centro de Massa da Região 55
56 Momentos Centrais Normalizados: q São Momentos centralizados em regiões e podem ser expressos como: µ p q ( x - x) ( y - y) f ( x, y dx dy ò ò pq ) - - Onde: x m m e y Para uma Imagem Digital: m m São as coordenadas do Centro de Massa, normalizadas pela área da região. µ pq åå p ( - x) ( y - x y q x y) f ( x, y) 56
57 Momentos Centrais até a ordem 3: µ åå åå x - x) ( y - y) f ( x, y) f ( x, y) x y x y ( m 00 µ 10 µ 01 µ µ µ Ordem 1 Ordem 0 0 m0 - xm10 0 m0 - ym01 11 m11 - ym10 µ µ µ µ Ordem 3 m - ym - xm y m m - xm - ym x m m - xm x m m - ym y m São Invariantes com relação à escala
58 Momentos Invariantes: q Conjunto de Momentos (Momentos Invariantes de Hu) que são relativamente invariantes à translação, rotação e escala. Momentos Centrais Normalizados pela área: µ pq p + q 1 pq Onde: g + µ g 00 Para p+q,3,4,... q Hu calculou 7 desses momentos. q A experiência tem mostrado que os 7 Momentos Invariantes de Hu, são suficientes para descrever uma região independente da rotação, translação e escala. 58
59 59 Momentos Invariantes de Hu: f ) ( f ) (3 ) 3 ( f ) ( ) ( f [ ] [ ] ) ( ) 3( ) )( (3 ) 3( ) ( ) )( 3 ( f [ ] ) )( ( 4 ) ( ) ( ) ( f [ ] [ ] ) ( ) 3( ) )( (3 ) 3( ) ( ) )( (3 f

60 Exemplo: 60


61 Exemplo: 61
62 FIM 6
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais. Prof. Adilson Gonzaga
 Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 9 Representação e Descrição. Profa. Fátima Nunes AULA 9 / 1. Profa. Fátima L. S. Nunes
 Fundamentos de Processamento Gráfico Aula 9 Representação e Descrição Profa. Fátima Nunes AULA 9 / 1 Reconhecimento de padrões AULA 9 / 2 Após a segmentação dar significado aos objetos extraídos da cena.
Fundamentos de Processamento Gráfico Aula 9 Representação e Descrição Profa. Fátima Nunes AULA 9 / 1 Reconhecimento de padrões AULA 9 / 2 Após a segmentação dar significado aos objetos extraídos da cena.
Representação e Descrição. Guillermo Cámara-Chávez
 Representação e Descrição Guillermo Cámara-Chávez Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem Para o reconhecimento do objeto é necessário descrever as propriedades
Representação e Descrição Guillermo Cámara-Chávez Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem Para o reconhecimento do objeto é necessário descrever as propriedades
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 3 de maio de 206 Representação e descrição de regiões Uma
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 3 de maio de 206 Representação e descrição de regiões Uma
REPRESENTAÇÃO E DESCRIÇÃO. Nielsen Castelo Damasceno
 REPRESENTAÇÃO E DESCRIÇÃO Nielsen Castelo Damasceno Representação e descrição Segmentação Representação e descrição Préprocessamento Problema Aquisição de imagem Base do conhecimento Reconhecimento e interpretação
REPRESENTAÇÃO E DESCRIÇÃO Nielsen Castelo Damasceno Representação e descrição Segmentação Representação e descrição Préprocessamento Problema Aquisição de imagem Base do conhecimento Reconhecimento e interpretação
Dr. Sylvio Barbon Junior. Departamento de Computação - UEL. 1 o Semestre de 2015
 Introdução a Computação Gráfica [5COP100] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre de 2015 Assunto Aula 8 Descritores de Imagens Digitais 2 of 47 Sumário Descritores e Reconhecimento
Introdução a Computação Gráfica [5COP100] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre de 2015 Assunto Aula 8 Descritores de Imagens Digitais 2 of 47 Sumário Descritores e Reconhecimento
Representação e Descrição. Guillermo Cámara-Chávez
 Representação e Descrição Guillermo Cámara-Chávez Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem Para o reconhecimento do objeto é necessário descrever as propriedades
Representação e Descrição Guillermo Cámara-Chávez Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem Para o reconhecimento do objeto é necessário descrever as propriedades
SEL-0339 Introdução à Visão Computacional. Aula 2 Processamento Espacial
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
SEL Visão Computacional. Aula 2 Processamento Espacial
 Departamento de Engenharia Elétrica - EESC-USP SEL-5895 - Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Adilson Gonzaga Prof. Dr. Evandro Linhari Rodrigues Prof. Dr. Marcelo Andrade da Costa
Departamento de Engenharia Elétrica - EESC-USP SEL-5895 - Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Adilson Gonzaga Prof. Dr. Evandro Linhari Rodrigues Prof. Dr. Marcelo Andrade da Costa
Descritores de Imagem (introdução)
") Descritores de Imagem (introdução) André Tavares da Silva andre.silva@udesc.br Roteiro da aula Definição de descritor de imagem Extração de Característica Tipos Geral x Específico Global (cor, textura,
Descritores de Imagem (introdução) André Tavares da Silva andre.silva@udesc.br Roteiro da aula Definição de descritor de imagem Extração de Característica Tipos Geral x Específico Global (cor, textura,
SEL-0339 Introdução à Visão Computacional. Aula 5 Segmentação de Imagens
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 5 Segmentação de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga Segmentação de
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 5 Segmentação de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga Segmentação de
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Universidade Federal do Paraná Departamento de Informática. Reconhecimento de Padrões. Extração de Características
 Universidade Federal do Paraná Departamento de Informática Reconhecimento de Padrões Extração de Características Luiz Eduardo S. Oliveira, Ph.D. http://lesoliveira.net Objetivos Entender os conceitos de
Universidade Federal do Paraná Departamento de Informática Reconhecimento de Padrões Extração de Características Luiz Eduardo S. Oliveira, Ph.D. http://lesoliveira.net Objetivos Entender os conceitos de
SEL-0339 Introdução à Visão Computacional. Aula 2 Processamento Espacial (Parte 2)
") Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial (Parte 2) Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial (Parte 2) Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
SEL-0339 Introdução à Visão Computacional. Aula 7 Reconhecimento de Objetos
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 7 Reconhecimento de Objetos Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 7 Reconhecimento de Objetos Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Capítulo 6 Extração de Características e Reconhecimento de Padrões e Objetos. Computação Gráfica - Vol. 2 - Cap. 6
 Capítulo 6 Extração de Características e Reconhecimento de Padrões e Objetos 1 Capítulo 6 6.1. Segmentação 6.2. Tipos de características 6.3. Descritores de forma 6.4. Reconhecimento de Padrões em Imagens
Capítulo 6 Extração de Características e Reconhecimento de Padrões e Objetos 1 Capítulo 6 6.1. Segmentação 6.2. Tipos de características 6.3. Descritores de forma 6.4. Reconhecimento de Padrões em Imagens
SEL-0339 Introdução à Visão Computacional. Aula 3 Processamento de Imagens Coloridas
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 3 Processamento de Imagens Coloridas Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 3 Processamento de Imagens Coloridas Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga mvieira@sc.usp.br
Aula 3 Processamento Espacial
 SEL 0449 - Processamento Digital de Imagens Médicas Aula 3 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Processamento Espacial Transformações ponto a ponto
SEL 0449 - Processamento Digital de Imagens Médicas Aula 3 Processamento Espacial Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Processamento Espacial Transformações ponto a ponto
Descritores de Imagem (introdução)
") Descritores de Imagem (introdução) André Tavares da Silva andre.silva@udesc.br Roteiro da aula Definição de descritor de imagem Extração de Característica Tipos Geral x Específico Global (cor, textura,
Descritores de Imagem (introdução) André Tavares da Silva andre.silva@udesc.br Roteiro da aula Definição de descritor de imagem Extração de Característica Tipos Geral x Específico Global (cor, textura,
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Introdução ao Processamento Digital de Imagens. Aula 6 Propriedades da Transformada de Fourier
 Introdução ao Processamento Digital de Imagens Aula 6 Propriedades da Transformada de Fourier Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Uma linha de uma imagem formada por uma sequência
Introdução ao Processamento Digital de Imagens Aula 6 Propriedades da Transformada de Fourier Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Uma linha de uma imagem formada por uma sequência
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança Conectividade Operações Lógicas e Aritméticas
Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança Conectividade Operações Lógicas e Aritméticas
Aula 4: Morfologia de Imagens
 SEL 5886 - VISÃO COMPUTACIONAL Aula 4: Morfologia de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Colaboração: Dr. Bruno R. N. Matheus Morfologia Morfologia matemática: Ferramenta para extração de
SEL 5886 - VISÃO COMPUTACIONAL Aula 4: Morfologia de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Colaboração: Dr. Bruno R. N. Matheus Morfologia Morfologia matemática: Ferramenta para extração de
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança e Aritméticas Efeitos de em Pixel a Pixel
Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança e Aritméticas Efeitos de em Pixel a Pixel
Algoritmos geométricos
 Algoritmos geométricos introdução a conceitos básicos de geometria computacional que serão abordados de forma mais avançada na disciplina Computação Gráfica disciplina de computação gráfica arquitetura
Algoritmos geométricos introdução a conceitos básicos de geometria computacional que serão abordados de forma mais avançada na disciplina Computação Gráfica disciplina de computação gráfica arquitetura
Extração de Características. Carlos Alexandre Mello
 Extração de Características Carlos Alexandre Mello Pós-Graduação em Ciência da Computação Carlos Alexandre Mello cabm@cin.ufpe.br 1 Extração de Características Representação de objetos através de um conjunto
Extração de Características Carlos Alexandre Mello Pós-Graduação em Ciência da Computação Carlos Alexandre Mello cabm@cin.ufpe.br 1 Extração de Características Representação de objetos através de um conjunto
Respostas do Teste de Analise de Imagens :
 Respostas do Teste de Analise de Imagens - 2004: 1Diga com suas palavras o que é: (Valor total da questão: 12) Filtragem passa alta (valor deste item até 0,3) - importante falar que apesar do nome ser
Respostas do Teste de Analise de Imagens - 2004: 1Diga com suas palavras o que é: (Valor total da questão: 12) Filtragem passa alta (valor deste item até 0,3) - importante falar que apesar do nome ser
Universidade Federal do Rio de Janeiro - IM/DCC & NCE
 Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
SEL Processamento Digital de Imagens Médicas. Aula 6 Processamento no Domínio da Frequência
 SEL 0449 - Processamento Digital de Imagens Médicas Aula 6 Processamento no Domínio da Frequência Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Processamento no Domínio da Frequência 2 Filtros
SEL 0449 - Processamento Digital de Imagens Médicas Aula 6 Processamento no Domínio da Frequência Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Processamento no Domínio da Frequência 2 Filtros
Descritores de Imagem (exemplos)
") Descritores de Imagem (exemplos) André Tavares da Silva andre.silva@udesc.br Baseado em Penatti (2009) e Silva (2011) Alguns exemplos Descritores baseados em cor Na literatura existem quatro abordagens
Descritores de Imagem (exemplos) André Tavares da Silva andre.silva@udesc.br Baseado em Penatti (2009) e Silva (2011) Alguns exemplos Descritores baseados em cor Na literatura existem quatro abordagens
Processamento Digital de Imagens. Análise de Imagens
 Processamento Digital de Imagens Análise de Imagens Eduardo A. B. da Silva Programa de Engenharia Elétrica - COPPE/UFRJ Laboratório de Sinais, Multimídia e Telecomunicações eduardo@smt.ufrj.br Sergio L.
Processamento Digital de Imagens Análise de Imagens Eduardo A. B. da Silva Programa de Engenharia Elétrica - COPPE/UFRJ Laboratório de Sinais, Multimídia e Telecomunicações eduardo@smt.ufrj.br Sergio L.
RESTAURAÇÃO E RECONSTRUÇÃO DE IMAGENS. Nielsen Castelo Damasceno
 RESTAURAÇÃO E RECONSTRUÇÃO DE IMAGENS Nielsen Castelo Damasceno Restauração de imagem Procura recuperar uma imagem corrompida com base em um conhecimento a priori do fenômeno de degradação. Restauração
RESTAURAÇÃO E RECONSTRUÇÃO DE IMAGENS Nielsen Castelo Damasceno Restauração de imagem Procura recuperar uma imagem corrompida com base em um conhecimento a priori do fenômeno de degradação. Restauração
Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação
 Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação Francisco A. Rodrigues Departamento de Matemática Aplicada e Estatística - SME 1 Objetivo Parametrização de curvas Extração de
Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação Francisco A. Rodrigues Departamento de Matemática Aplicada e Estatística - SME 1 Objetivo Parametrização de curvas Extração de
Processamento de Imagens: fundamentos. Julio C. S. Jacques Junior
 Processamento de Imagens: fundamentos Julio C. S. Jacques Junior juliojj@gmail.com Fronteiras do Processamento de Imagens Processamento de dados Dados / Informação Visão Computacional Computação Gráfica
Processamento de Imagens: fundamentos Julio C. S. Jacques Junior juliojj@gmail.com Fronteiras do Processamento de Imagens Processamento de dados Dados / Informação Visão Computacional Computação Gráfica
Aprendizagem de Máquina
 Aprendizagem de Máquina Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) EXTRAÇÃO DE CARACTERÍSTICAS Definição Característica: variável ou atributo
Aprendizagem de Máquina Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) EXTRAÇÃO DE CARACTERÍSTICAS Definição Característica: variável ou atributo
SEL Processamento Digital de Imagens Médicas. Aula 4 Transformada de Fourier. Prof. Dr. Marcelo Andrade da Costa Vieira
 SEL 0449 - Processamento Digital de Imagens Médicas Aula 4 Transformada de Fourier Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Jean Baptiste Joseph Fourier 2 Exemplo: Função Degrau 3 Exemplo:
SEL 0449 - Processamento Digital de Imagens Médicas Aula 4 Transformada de Fourier Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Jean Baptiste Joseph Fourier 2 Exemplo: Função Degrau 3 Exemplo:
Aula 5 - Segmentação de Imagens
 Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo
Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo
Ponto em Polígono. António Leslie Bajuelos Departamento de Matemática Universidade de Aveiro
 Ponto em Polígono António Leslie Bajuelos Departamento de Matemática Universidade de Aveiro Preliminares Uma curva poligonal (ou cadeia poligonal) é uma sequência finita v 0, e 0, v,, e n-2, v n-, e n-
Ponto em Polígono António Leslie Bajuelos Departamento de Matemática Universidade de Aveiro Preliminares Uma curva poligonal (ou cadeia poligonal) é uma sequência finita v 0, e 0, v,, e n-2, v n-, e n-
Computação Gráfica. Prof. MSc André Yoshimi Kusumoto
 Computação Gráfica Prof. MSc André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Primitivas gráficas em duas dimensões Matrizes em Computação Gráfica Todas as transformações geométricas podem ser representadas
Computação Gráfica Prof. MSc André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Primitivas gráficas em duas dimensões Matrizes em Computação Gráfica Todas as transformações geométricas podem ser representadas
Extração de Características
 Extração de Características Alceu S. Britto Jr. Alessandro L. Koerich Aprendizagem de Máquina Mestrado/Doutorado em Informática 2009 Definição Característica: variável ou atributo utilizado na descrição
Extração de Características Alceu S. Britto Jr. Alessandro L. Koerich Aprendizagem de Máquina Mestrado/Doutorado em Informática 2009 Definição Característica: variável ou atributo utilizado na descrição
Exemplos. Propagação (Reconstrução)
") Processamento de Imagens Médicas Morfologia Matemática em Imagens Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) Propagação (Reconstrução) lgoritmos Baseados
Processamento de Imagens Médicas Morfologia Matemática em Imagens Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) Propagação (Reconstrução) lgoritmos Baseados
Consultas por Similaridade em Domínios de Dados Complexos
 Consultas por Similaridade em Domínios de Dados Complexos Guilherme Felipe Zabot Orientador: Profº Dr Caetano Traina Jr Roteiro Objetivo Introdução Dados Complexos Representação de Dados Complexos Extração
Consultas por Similaridade em Domínios de Dados Complexos Guilherme Felipe Zabot Orientador: Profº Dr Caetano Traina Jr Roteiro Objetivo Introdução Dados Complexos Representação de Dados Complexos Extração
A B C A 1 B 1 C 1 A 2 B 2 C 2 é zero (exceto o caso em que as tres retas são paralelas).
.") MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
CIC 111 Análise e Projeto de Algoritmos II
 CIC 111 Análise e Projeto de Algoritmos II Prof. Roberto Affonso da Costa Junior Universidade Federal de Itajubá AULA 29 Geometry Complex numbers Points and lines Polygon area Distance functions Geometry
CIC 111 Análise e Projeto de Algoritmos II Prof. Roberto Affonso da Costa Junior Universidade Federal de Itajubá AULA 29 Geometry Complex numbers Points and lines Polygon area Distance functions Geometry
Métodos de Extração de Características
 1. Introdução Métodos de Extração de Características A Interpretação ou entendimento de uma cena demanda o reconhecimento de seus objetos. Reconhecimento de objetos ou padrões contidos em uma cena -> é
1. Introdução Métodos de Extração de Características A Interpretação ou entendimento de uma cena demanda o reconhecimento de seus objetos. Reconhecimento de objetos ou padrões contidos em uma cena -> é
2 SIFT (Scale Invariant Feature Transform)
") SIFT (Scale Invariant Feature Transform) O SIFT é um algoritmo de visão computacional proposto e publicado pelo pesquisador David Lowe (Lowe, 1999), professor do departamento de Ciência da Computação na
SIFT (Scale Invariant Feature Transform) O SIFT é um algoritmo de visão computacional proposto e publicado pelo pesquisador David Lowe (Lowe, 1999), professor do departamento de Ciência da Computação na
INTRODUÇÃO AO PROCESSAMENTO DIGITAL DE IMAGENS SENSORIAMENTO REMOTO
 INTRODUÇÃO AO PROCESSAMENTO DIGITAL DE IMAGENS SENSORIAMENTO REMOTO PROCESSAMENTO DE IMAGENS Introdução Conceitos básicos Pré-processamento Realce Classificação PROCESSAMENTO DE IMAGENS Extração de Informações
INTRODUÇÃO AO PROCESSAMENTO DIGITAL DE IMAGENS SENSORIAMENTO REMOTO PROCESSAMENTO DE IMAGENS Introdução Conceitos básicos Pré-processamento Realce Classificação PROCESSAMENTO DE IMAGENS Extração de Informações
4 Detecção de Silhueta
 4 Detecção de Silhueta No decorrer deste capítulo é proposto um modelo de detecção da silhueta da mão capaz de lidar com os erros da segmentação e ruídos na sua morfologia. Num primeiro passo são considerados
4 Detecção de Silhueta No decorrer deste capítulo é proposto um modelo de detecção da silhueta da mão capaz de lidar com os erros da segmentação e ruídos na sua morfologia. Num primeiro passo são considerados
SEL Introdução ao Processamento Digital de Imagens. Aula 9 Restauração de Imagens Parte 2
 SEL5895 - Introdução ao Processamento Digital de Imagens Aula 9 Restauração de Imagens Parte 2 Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Modelo de Degradação e Restauração g(x,y) = h(x,y)
SEL5895 - Introdução ao Processamento Digital de Imagens Aula 9 Restauração de Imagens Parte 2 Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br Modelo de Degradação e Restauração g(x,y) = h(x,y)
UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba. Transformações Geométricas
 UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba Transformações Geométricas .(x,y, P).(x,y, P) Imagem fonte Imagem transformada Deve-se notar que, como uma imagem digital é representada por uma matriz
UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba Transformações Geométricas .(x,y, P).(x,y, P) Imagem fonte Imagem transformada Deve-se notar que, como uma imagem digital é representada por uma matriz
[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações
![[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações](/thumbs/53/31629185.jpg "[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações") [2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações Dr. Sylvio Barbon Junior PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DE ALIMENTOS - UEL 2016 Assunto Aula 4 Segmentação de Imagens 2 de
[2CTA121] Processamento de Imagens em Alimentos: Conceitos e Aplicações Dr. Sylvio Barbon Junior PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DE ALIMENTOS - UEL 2016 Assunto Aula 4 Segmentação de Imagens 2 de
Aula 8 Reconhecimento de Padroes : parte 2.
 Aula 8 Reconhecimento de Padroes : parte 2. Análise de Imagens - 2015 Aura Conci Etapas de um sistema de reconhecimento de padrões. Padrão como generalização de um Pixel, Voxel ou Região Vizinhança do
Aula 8 Reconhecimento de Padroes : parte 2. Análise de Imagens - 2015 Aura Conci Etapas de um sistema de reconhecimento de padrões. Padrão como generalização de um Pixel, Voxel ou Região Vizinhança do
MAT 112 Vetores e Geometria. Prova SUB C
 MAT 112 Vetores e Geometria Prof. Paolo Piccione 02 de julho de 2019 Prova SUB C Turmas: 2019146 e 2019134 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos.
MAT 112 Vetores e Geometria Prof. Paolo Piccione 02 de julho de 2019 Prova SUB C Turmas: 2019146 e 2019134 Nome: Número USP: Assinatura: Instruções A duração da prova é de uma hora e quarenta minutos.
Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia
 Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia Aluno: Gabriel Malizia Orientador: Professor Marcelo Gattass Co-Orientador: Professor Paulo Cezar Carvalho
Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia Aluno: Gabriel Malizia Orientador: Professor Marcelo Gattass Co-Orientador: Professor Paulo Cezar Carvalho
Coordenadas Cartesianas
 1 Coordenadas Cartesianas 1.1 O produto cartesiano Para compreender algumas notações utilizadas ao longo deste texto, é necessário entender o conceito de produto cartesiano, um produto entre conjuntos
1 Coordenadas Cartesianas 1.1 O produto cartesiano Para compreender algumas notações utilizadas ao longo deste texto, é necessário entender o conceito de produto cartesiano, um produto entre conjuntos
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Resultantes de um sistema de forças
 Resultantes de um sistema de forças Objetivos da aula Discutir o conceito do momento de uma força e mostrar como calculá-lo em duas e três dimensões. Fornecer um método para determinação do momento de
Resultantes de um sistema de forças Objetivos da aula Discutir o conceito do momento de uma força e mostrar como calculá-lo em duas e três dimensões. Fornecer um método para determinação do momento de
Processamento De Imagem. Descritores de Cor
 Processamento De Imagem Descritores de Cor Cores Uma das propriedades mais importantes para visão humana. Muito usada em sistemas de recuperação de imagens, CBIRs. Taxonomia Global A informação de cor
Processamento De Imagem Descritores de Cor Cores Uma das propriedades mais importantes para visão humana. Muito usada em sistemas de recuperação de imagens, CBIRs. Taxonomia Global A informação de cor
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
MORFOLOGIA MATEMÁTICA
 MORFOLOGIA MATEMÁTICA Morfologia Na Biologia área que trata com a forma e a estrutura de plantas e animais Processamento de Imagens Ferramenta para extração de componentes de imagens que sejam úteis na
MORFOLOGIA MATEMÁTICA Morfologia Na Biologia área que trata com a forma e a estrutura de plantas e animais Processamento de Imagens Ferramenta para extração de componentes de imagens que sejam úteis na
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Processamento de Imagens. Segmentação por regiões
 Processamento de Imagens Segmentação por regiões Inúmeros Métodos Clusterização Baseados em histograma Detecção de bordas Crescimento de regiões Level Set Particionamento de grafos Watershed Baseados em
Processamento de Imagens Segmentação por regiões Inúmeros Métodos Clusterização Baseados em histograma Detecção de bordas Crescimento de regiões Level Set Particionamento de grafos Watershed Baseados em
CPV 82% de aprovação na ESPM
 8% de aprovação na ESPM ESPM NOVEMBRO/00 Prova E MATemática. Assinale a alternativa cujo valor seja a soma dos valores das demais: a) 0 + b) 5% c) d) 75% de 3 e) log 0,5 a) 0 + + 3,5 5 b) 5 % 5 00 0 0,5
8% de aprovação na ESPM ESPM NOVEMBRO/00 Prova E MATemática. Assinale a alternativa cujo valor seja a soma dos valores das demais: a) 0 + b) 5% c) d) 75% de 3 e) log 0,5 a) 0 + + 3,5 5 b) 5 % 5 00 0 0,5
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Processamento de Imagens. Texturas
 Processamento de Imagens Texturas Exemplos Introdução Texturas Não existe abordagem formal Não existe definição formal São definidas qualitativamente e não há consenso quanto a sua definição quantitativa
Processamento de Imagens Texturas Exemplos Introdução Texturas Não existe abordagem formal Não existe definição formal São definidas qualitativamente e não há consenso quanto a sua definição quantitativa
Aprendizagem de Máquinas. Extração de Características
 Universidade Federal do Paraná (UFPR) Departamento de Informática (DInf) Aprendizagem de Máquinas Extração de Características David Menotti, Ph.D. http://web.inf.ufpr.br/menotti 1 Objetivos Entender os
Universidade Federal do Paraná (UFPR) Departamento de Informática (DInf) Aprendizagem de Máquinas Extração de Características David Menotti, Ph.D. http://web.inf.ufpr.br/menotti 1 Objetivos Entender os
PMR2560 Visão Computacional Conversão e Limiarização. Prof. Eduardo L. L. Cabral
 PMR2560 Visão Computacional Conversão e Limiarização Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Conversão de imagens; Histograma; Limiarização. Imagem digital Uma imagem é uma matriz
PMR2560 Visão Computacional Conversão e Limiarização Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Conversão de imagens; Histograma; Limiarização. Imagem digital Uma imagem é uma matriz
Capítulo 1-Sistemas de Coordenadas
 Capítulo 1-Sistemas de Coordenadas 1 Sistema Unidimensional de Coordenadas Conceito: Neste sistema, também chamado de Sistema Linear, um ponto pode se mover livremente sobre uma reta (ou espaço unidimensional).
Capítulo 1-Sistemas de Coordenadas 1 Sistema Unidimensional de Coordenadas Conceito: Neste sistema, também chamado de Sistema Linear, um ponto pode se mover livremente sobre uma reta (ou espaço unidimensional).
Professor: Computação Gráfica I. Anselmo Montenegro Conteúdo: - Objetos gráficos planares. Instituto de Computação - UFF
 Computação Gráfica I Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Objetos gráficos planares 1 Objetos gráficos: conceitos O conceito de objeto gráfico é fundamental para a Computação
Computação Gráfica I Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Objetos gráficos planares 1 Objetos gráficos: conceitos O conceito de objeto gráfico é fundamental para a Computação
MAT 105- Lista de Exercícios
 1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
Introdução à Computação Gráfica
 Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Processamento de Imagem. Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres
 Professora Sheila Cáceres") Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Objetos Gráficos Planares
 Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Planares Prof. Thales Vieira 2011 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Planares Prof. Thales Vieira 2011 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
7º Ano. Planificação Matemática 2014/2015. Escola Básica Integrada de Fragoso 7º Ano
 7º Ano Planificação Matemática 2014/2015 Escola Básica Integrada de Fragoso 7º Ano Domínio Subdomínio Conteúdos Objetivos gerais / Metas Números e Operações Números racionais - Simétrico da soma e da diferença
7º Ano Planificação Matemática 2014/2015 Escola Básica Integrada de Fragoso 7º Ano Domínio Subdomínio Conteúdos Objetivos gerais / Metas Números e Operações Números racionais - Simétrico da soma e da diferença
3 Segmentador Multiresolução Estendido
 3 Segmentador Multiresolução Estendido Neste capítulo é abordado o método de segmentação de imagens proposto neste trabalho. A seção 3.1 apresenta o método de segmentação. Na seção 3.2 são apresentados
3 Segmentador Multiresolução Estendido Neste capítulo é abordado o método de segmentação de imagens proposto neste trabalho. A seção 3.1 apresenta o método de segmentação. Na seção 3.2 são apresentados
Resistência dos Materiais
 Resistência dos Materiais Prof. Antonio Dias Antonio Dias / Cap.04 1 Resultantes de um sistema de forças Prof. Antonio Dias Antonio Dias / Cap.04 2 Objetivo Discutir o conceito do momento de uma força
Resistência dos Materiais Prof. Antonio Dias Antonio Dias / Cap.04 1 Resultantes de um sistema de forças Prof. Antonio Dias Antonio Dias / Cap.04 2 Objetivo Discutir o conceito do momento de uma força
Análise e Complexidade de Algoritmos
 Análise e Complexidade de Algoritmos Introdução a algoritmos geométricos e seus métodos - varredura - envoltória convexa Prof. Rodrigo Rocha prof.rodrigorocha@yahoo.com http://www.bolinhabolinha.com Onde
Análise e Complexidade de Algoritmos Introdução a algoritmos geométricos e seus métodos - varredura - envoltória convexa Prof. Rodrigo Rocha prof.rodrigorocha@yahoo.com http://www.bolinhabolinha.com Onde
Geometria Analítica. Geometria Analítica 28/08/2012
 Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Professor: Anselmo Montenegro Conteúdo: Aula 2. - Primitivas Geométricas. Instituto de Computação - UFF
 Geometria Computacional Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: Aula - Primitivas Geométricas 1 Roteiro Introdução Operações primitivas Distâncias Ângulos Ângulos orientados Áreas
Geometria Computacional Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: Aula - Primitivas Geométricas 1 Roteiro Introdução Operações primitivas Distâncias Ângulos Ângulos orientados Áreas
Figura 9.1: Corpo que pode ser simplificado pelo estado plano de tensões (a), estado de tensões no interior do corpo (b).
, estado de tensões no interior do corpo (b).") 9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
NOTAÇÕES. R : conjunto dos números reais C : conjunto dos números complexos
 NOTAÇÕES R : conjunto dos números reais C : conjunto dos números complexos i : unidade imaginária: i = 1 z : módulo do número z C Re(z) : parte real do número z C Im(z) : parte imaginária do número z C
NOTAÇÕES R : conjunto dos números reais C : conjunto dos números complexos i : unidade imaginária: i = 1 z : módulo do número z C Re(z) : parte real do número z C Im(z) : parte imaginária do número z C
Aula 2 Aquisição de Imagens
 SEL 0449 - Processamento Digital de Imagens Médicas Aula 2 Aquisição de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Fundamentos de Imagens Digitais Ocorre a formação de
SEL 0449 - Processamento Digital de Imagens Médicas Aula 2 Aquisição de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Fundamentos de Imagens Digitais Ocorre a formação de
Alunos: Caio Santos Renato Miceli
 rangel@dscufcgedubr/ rangeldequeirop@yahoocombr Alunos: Caio Santos Renato Miceli UNIVERSIDADE FEDERAL DE CAMPINA GRANDE UFCG Av Aprígio Veloso, S/N Bodocongó CEP: 58109-190 Campina Grande PB www.ufcg.edu.br/
rangel@dscufcgedubr/ rangeldequeirop@yahoocombr Alunos: Caio Santos Renato Miceli UNIVERSIDADE FEDERAL DE CAMPINA GRANDE UFCG Av Aprígio Veloso, S/N Bodocongó CEP: 58109-190 Campina Grande PB www.ufcg.edu.br/
Rotação e Interpolação
 Rotação e Interpolação Resumo O objetivo desse artigo é mostrar como é feita a rotação em qualquer ângulo de imagens 2D, bem como apresentar dois métodos de interpolação de pontos vizinho mais próximo
Rotação e Interpolação Resumo O objetivo desse artigo é mostrar como é feita a rotação em qualquer ângulo de imagens 2D, bem como apresentar dois métodos de interpolação de pontos vizinho mais próximo
Nome: nº Professor(a): UBERLAN / CRISTIANA Série: 3ª EM Turmas: 3301 / 3302 Data: / /2013
: UBERLAN / CRISTIANA Série: 3ª EM Turmas: 3301 / 3302 Data: / /2013") Nome: nº Professor(a): UBERLAN / CRISTIANA Série: 3ª EM Turmas: 3301 / 3302 Data: / /2013 Sem limite para crescer Bateria de Exercícios de Matemática II 1) A área do triângulo, cujos vértices são (1, 2),
Nome: nº Professor(a): UBERLAN / CRISTIANA Série: 3ª EM Turmas: 3301 / 3302 Data: / /2013 Sem limite para crescer Bateria de Exercícios de Matemática II 1) A área do triângulo, cujos vértices são (1, 2),
Radiométricas. Alexandre Xavier Falcão. Instituto de Computação - UNICAMP
 Operações Matemáticas e Transformações Radiométricas Instituto de Computação - UNICAMP afalcao@ic.unicamp.br Operações Matemáticas Sejam Î = (D I, I ) e Ĵ = (D J, J) duas imagens cinzas de mesmo domínio,
Operações Matemáticas e Transformações Radiométricas Instituto de Computação - UNICAMP afalcao@ic.unicamp.br Operações Matemáticas Sejam Î = (D I, I ) e Ĵ = (D J, J) duas imagens cinzas de mesmo domínio,
Tratamento da Imagem Transformações (cont.)
") Universidade Federal do Rio de Janeiro - IM/DCC & NCE Tratamento da Imagem Transformações (cont.) Antonio G. Thomé thome@nce.ufrj.br Sala AEP/33 Transformações Geométricas 3 Transformações Geométricas
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Tratamento da Imagem Transformações (cont.) Antonio G. Thomé thome@nce.ufrj.br Sala AEP/33 Transformações Geométricas 3 Transformações Geométricas
Transformações de Pontos. Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles
 Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
Transformações de Pontos Computação Gráfica Prof. Dr. Paulo Roberto Gomes Luzzardi Aluna: Karina da Silva Salles Sumário Motivação Definição Translação Escala Rotação Reflexão Shearing Referências Motivação
Processamento de Imagem. Relaçionamentos entre pixels e Operações Aritméticas e Lógicas Professora Sheila Cáceres
 Processamento de Imagem Relaçionamentos entre pixels e Operações Aritméticas e Lógicas Professora Sheila Cáceres Relacionamentos básicos entre elementos de uma imagem Vizinhança Conectividade Adjacência
Processamento de Imagem Relaçionamentos entre pixels e Operações Aritméticas e Lógicas Professora Sheila Cáceres Relacionamentos básicos entre elementos de uma imagem Vizinhança Conectividade Adjacência
Geometria Analítica - AFA
 Geometria Analítica - AFA x = v + (AFA) Considerando no plano cartesiano ortogonal as retas r, s e t, tais que (r) :, (s) : mx + y + m = 0 e (t) : x = 0, y = v analise as proposições abaixo, classificando-
Geometria Analítica - AFA x = v + (AFA) Considerando no plano cartesiano ortogonal as retas r, s e t, tais que (r) :, (s) : mx + y + m = 0 e (t) : x = 0, y = v analise as proposições abaixo, classificando-
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de f 1 = 2 e 1 e 2 e 3,
 MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de 2015 1 Sendo E = { e 1 e 2 e 3 } F = { f 1 f 2 f 3 } bases com: f 1 = 2 e 1 e 3 f 2 = e 2 + 2 e 3 f 3 = 7 e 3 e w = e
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de 2015 1 Sendo E = { e 1 e 2 e 3 } F = { f 1 f 2 f 3 } bases com: f 1 = 2 e 1 e 3 f 2 = e 2 + 2 e 3 f 3 = 7 e 3 e w = e
Universidade Federal de Sergipe Departamento de Matemática. Imagem* Profª. Maria Andrade. *Parte desta apresentação foi do Prof. Thales Vieira.
 Universidade Federal de Sergipe Departamento de Matemática Imagem* Profª. Maria Andrade *Parte desta apresentação foi do Prof. Thales Vieira. 2016 O que é uma imagem digital? Imagem no universo físico
Universidade Federal de Sergipe Departamento de Matemática Imagem* Profª. Maria Andrade *Parte desta apresentação foi do Prof. Thales Vieira. 2016 O que é uma imagem digital? Imagem no universo físico
PROCESSAMENTO DE IMAGENS
 PROCESSAMENTO DE IMAGENS Introdução Conceitos básicos Pré-processamento Realce Classificação PROCESSAMENTO DE IMAGENS- aula de 25/5/10 Introdução Conceitos básicos Pré-processamento Realce Classificação
PROCESSAMENTO DE IMAGENS Introdução Conceitos básicos Pré-processamento Realce Classificação PROCESSAMENTO DE IMAGENS- aula de 25/5/10 Introdução Conceitos básicos Pré-processamento Realce Classificação
UFBA / UFRB a Fase Matemática RESOLUÇÃO: Professora Maria Antônia Gouveia. QUESTÕES de 01 a 08
 UFBA / UFRB 008 1a Fase Matemática Professora Maria Antônia Gouveia QUESTÕES de 01 a 08 INSTRUÇÃO: Assinale as proposições verdadeiras, some os números a elas associados e marque o resultado na Folha de
UFBA / UFRB 008 1a Fase Matemática Professora Maria Antônia Gouveia QUESTÕES de 01 a 08 INSTRUÇÃO: Assinale as proposições verdadeiras, some os números a elas associados e marque o resultado na Folha de
7.1 Área: conceito e áreas do quadrado e do
 page 8 7.1 Área: conceito e áreas do quadrado e do retângulo 8 7.1 Área: conceito e áreas do quadrado e do retângulo Dada uma figura no plano, vamos definir a área desta figura como o resultado da comparação
page 8 7.1 Área: conceito e áreas do quadrado e do retângulo 8 7.1 Área: conceito e áreas do quadrado e do retângulo Dada uma figura no plano, vamos definir a área desta figura como o resultado da comparação
Processamento de Imagens Digitais
 Processamento de Imagens Digitais Antonio Cesar Germano Martins 2º semestre de 2018 Apresentações Nascido em Sorocaba. Graduado em Bacharelado em Física pela UNICAMP em 1989, tendo participado de pesquisas
Processamento de Imagens Digitais Antonio Cesar Germano Martins 2º semestre de 2018 Apresentações Nascido em Sorocaba. Graduado em Bacharelado em Física pela UNICAMP em 1989, tendo participado de pesquisas
Av. João Pessoa, 100 Magalhães Laguna / Santa Catarina CEP
 Disciplina: Matemática Curso: Ensino Médio Professor(a): Flávio Calônico Júnior Turma: 3ª Série E M E N T A II Trimestre 2013 Conteúdos Programáticos Data 21/maio 28/maio Conteúdo FUNÇÃO MODULAR Interpretação
Disciplina: Matemática Curso: Ensino Médio Professor(a): Flávio Calônico Júnior Turma: 3ª Série E M E N T A II Trimestre 2013 Conteúdos Programáticos Data 21/maio 28/maio Conteúdo FUNÇÃO MODULAR Interpretação