Técnicas de Visualização para Dados Multivariados
|
|
|
- Neusa Avelar Leveck
- 6 Há anos
- Visualizações:
Transcrição
1 Técnicas de Visualização para Dados Multivariados SCC5836 Visualização Computacional Prof. Fernando V. Paulovich Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP) 1 / 145
2 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 2 / 145
3 Introdução Técnicas que serão discutidas servem para a visualização de listas e tabelas de dados que não apresentam atributo espacial 3 / 145
4 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 4 / 145
5 Técnicas baseadas em Ponto Visualizações baseados em pontos são projeções de instâncias m-dimensionais para pontos em um espaço visual p-dimensional Um glifo é associado a cada ponto p-dimensional 5 / 145
6 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 6 / 145
7 Scatterplots ou Matrizes de Scatterplots Scatterplots são as visualização mais comuns, mas conforme a dimensionalidade aumenta, é preciso buscar estratégias alternativas 7 / 145
8 Scatterplots ou Matrizes de Scatterplots Scatterplots são as visualização mais comuns, mas conforme a dimensionalidade aumenta, é preciso buscar estratégias alternativas Escolha das dimensões: manualmente ou por algum algoritmo 8 / 145
9 Scatterplots ou Matrizes de Scatterplots Scatterplots são as visualização mais comuns, mas conforme a dimensionalidade aumenta, é preciso buscar estratégias alternativas Escolha das dimensões: manualmente ou por algum algoritmo Redução do número de dimensões: usando técnicas como PCA 9 / 145
10 Scatterplots ou Matrizes de Scatterplots Scatterplots são as visualização mais comuns, mas conforme a dimensionalidade aumenta, é preciso buscar estratégias alternativas Escolha das dimensões: manualmente ou por algum algoritmo Redução do número de dimensões: usando técnicas como PCA Incorporação das dimensões: mapear outras dimensões para atributos gráficos 10 / 145
11 Scatterplots ou Matrizes de Scatterplots Scatterplots são as visualização mais comuns, mas conforme a dimensionalidade aumenta, é preciso buscar estratégias alternativas Escolha das dimensões: manualmente ou por algum algoritmo Redução do número de dimensões: usando técnicas como PCA Incorporação das dimensões: mapear outras dimensões para atributos gráficos Múltiplos displays: mostrar usando sobreposição ou justaposição 11 / 145

12 Scatterplots ou Matrizes de Scatterplots Matriz de scatterplots define uma grade de m 2 células, sendo m o número de dimensões Figura: Pontos em vermelho são instâncias selecionadas. 12 / 145
13 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 13 / 145
14 Projeção Multidimensional O princípio dos métodos de projeção é tentar preservar no espaço projetado p-dimensional as relações presentes no espaço m-dimensional original Por exemplo, relações de similaridades, distâncias, vizinhanças, etc. 14 / 145
15 Projeção Multidimensional O princípio dos métodos de projeção é tentar preservar no espaço projetado p-dimensional as relações presentes no espaço m-dimensional original Por exemplo, relações de similaridades, distâncias, vizinhanças, etc. Se p = 2 o resultado é um conjunto de pontos no plano Pontos próximos indicam instâncias relacionadas, pontos distantes indicam instâncias não-relacionadas 15 / 145
16 Projeção Multidimensional baseada em Distância 16 / 145
17 Projeção Multidimensional baseada em Distância δ : x i,x j R,x i,x j X 17 / 145
18 Projeção Multidimensional baseada em Distância δ : x i,x j R,x i,x j X d : y i,y j R,y i,y j Y 18 / 145
 d(f (x i ),f (x j )) 0, x i,x j X 19 /")
19 Projeção Multidimensional baseada em Distância δ : x i,x j R,x i,x j X d : y i,y j R,y i,y j Y f : X Y, δ(x i,x j ) d(f (x i ),f (x j )) 0, x i,x j X 19 / 145
 (http://hdr.undp.org/en/data) http://infoserver.lcad.")
20 Projeção Multidimensional IDH/ONU de 2006 ( ( / 145
21 Projeção Multidimensional Símbolo X m x i Y p y i n δ(x i,x j ) d(y i,y j ) Significado conjunto de objetos no espaço original m-dimensional. dimensionalidade do espaço original. i-ésimo objeto no espaço original. Quando esse admite uma representação vetorial, suas coordenadas são dadas por x i = (x i1,x i2,...,x im ). conjunto de pontos no espaço projetado p-dimensional. dimensionalidade do espaço projetado. i-ésimo ponto do espaço projetado. Quando esse admite uma representação vetorial, suas coordenadas são dadas por y i = (y i1,y i2,...,y ip ). número de objetos no espaço original e de pontos no projetado. dissimilaridade entre os objetos i e j no espaço original. distância entre os pontos i e j no espaço projetado. Tabela: Símbolos mais frequentes e seus significados. 21 / 145
22 Projeção Multidimensional Podemos categorizar as técnicas de projeção nos seguintes grupos 22 / 145
23 Projeção Multidimensional Podemos categorizar as técnicas de projeção nos seguintes grupos Técnicas baseadas em força (Force-Direct Placement (FDP)) 23 / 145
24 Projeção Multidimensional Podemos categorizar as técnicas de projeção nos seguintes grupos Técnicas baseadas em força (Force-Direct Placement (FDP)) Técnicas de decomposição espectral 24 / 145
25 Projeção Multidimensional Podemos categorizar as técnicas de projeção nos seguintes grupos Técnicas baseadas em força (Force-Direct Placement (FDP)) Técnicas de decomposição espectral Técnicas de redução de dimensionalidade 25 / 145
26 Técnicas baseadas em Força As técnicas de projeção baseadas no Modelo de Molas são as mais simples Tentam levar um sistema de objetos conectados por molas a um estado de equilíbrio Sistema iterativo que, a partir de uma configuração inicial atualiza as forças associadas às molas para puxar ou empurrar os objetos até atingir uma posição de equilíbrio As forças no sistema são calculadas proporcionais à diferença entre as dissimilaridades δ(x i,x j ) e as distâncias d(y i,y j ) 26 / 145
27 Modelo de Molas Os objetos são modelados como partículas ponto-massa ligadas entre si por meio de molas Conjunto de partículas está sujeito às leis de Newton f = m a (1) 27 / 145
28 Modelo de Molas Os objetos são modelados como partículas ponto-massa ligadas entre si por meio de molas Conjunto de partículas está sujeito às leis de Newton f = m a (1) Resolve-se um sistema de equação diferenciais ordinárias de segunda ordem. Problema: o custo computacional é alto, O(n 2 ) a cada iteração { v = a = f /m p = v (2) 28 / 145
29 Force Scheme Force Scheme [Tejada et al., 2003] é uma outra abordagem, mas ainda com custo computacional alto, O(n 2 ) 1: para iter=1 até k faça 2: para todo y i Y faça 3: para todo y j Y com y j y i faça 4: Calcular v como sendo o vetor de y i para y j 5: Mover y j em direção de v uma fração de 6: fim para 7: fim para 8: Normalizar as coordenadas da projeção no intervalo [0, 1] em ambas as dimensões 9: fim para = δ(x i,x j ) δ min δ max δ min d(y i,y j ) (3) 29 / 145
30 Sammon s Mapping A Sammon s Mapping [Sammon, 1969] minimiza uma função de perda usando o método de gradientes descendentes S = 1 i<j δ(x i,x j ) (d(y i,y j ) δ(x i,x j )) 2 i<j δ(x i,x j ) (4) A m-ésima iteração desse método é definida como y pq (m + 1) = y pq (m) MF pq (m) (5) Onde y pq denota a coordenada q do ponto p e pq (m) = S(m) / 2 S(m) y pq (m) y 2 pq(m) (6) 30 / 145
31 Aproximação de Pekalska A técnica de Sammon s Mapping é O(n 3 ). A fim de reduzir essa complexidade, Pekalska et al [Pekalska et al., 1999] definiram uma abordagem em que apenas uma amostra inicial dos pontos é projetada, e as posições dos demais elementos são interpoladas a partir do posicionamento dos pontos projetados. Para essa interpolação, o operador V é encontrado resolvendo o sistema linear D V = Y onde D é a matriz de distâncias δ(x i,x j ) entre os elementos da amostra e Y é a projeção da amostra 31 / 145
32 Classical Scaling (MDS) A Classical Scaling (MDS) [Borg and Groenen, 2005] foi uma das primeiras técnicas de projeção (definida em 1930) Sejam x i (i = 1,...,n) as coordenadas de n pontos em um espaço Euclideano m-dimensional, onde x i = (x i1,...,x im ) T, e seja B a matrix do produto interno entre vetores, [B] ij = b ij = x T i x j Com distância Euclideana entre os pontos i e j dada por ˆδ(x i,x j ) 2 = (x i x j ) T (x i x j ) (7) A partir de uma matriz da distâncias ( ˆδ(x i,x j ) 2 ), encontra a matriz do produto interno B, e a partir de B calcula as coordenadas dos pontos 32 / 145
33 Classical Scaling (MDS) A matrix B pode ser reescrita como A é a matrix [A] ij = a ij = ˆδ(x i,x j ) 2 H é a matrix de centragem B = 1 HAH (8) 2 Usando decomposição espectral, B pode ser reescrita como B = VΛV T Como B = XX T, a matrix de coordenadas X é dada por X = V 1 Λ / 145
34 Técnicas de Redução de Dimensionalidade Definição Técnicas para redução de dimensionalidade buscam encontrar uma representação em um espaço de menor dimensão que capture o conteúdo original dos dados segundo algum critério 34 / 145
35 Principal Component Analysis (PCA) PCA [Jolliffe, 1986] é uma das técnicas de redução de dimensionalidade mais utilizadas Consegue capturar a maior parte da variabilidade com poucas dimensões Elimina grande parte do ruído existente, etc. 35 / 145
36 Principal Component Analysis (PCA) PCA [Jolliffe, 1986] é uma das técnicas de redução de dimensionalidade mais utilizadas Consegue capturar a maior parte da variabilidade com poucas dimensões Elimina grande parte do ruído existente, etc. Primeiro é criada a matriz de covariância C m m dos atributos Em seguida obtém a decomposição espectral, encontrando Por fim é obtido o espaço reduzido fazendo C = UAU T (9) S = X [u 1,u 2,...,u p ] (10) 36 / 145
37 Least-Square Projection (LSP) Na Least-Square Projection (LSP) [Paulovich et al., 2008] primeiro é selecionada uma amostra das instâncias multidimensionais, chamados de pontos de controle. Esses pontos são projetados em um espaço R p Para cada objeto é definido um conjunto de vizinhos no R m. Fazendo uso das relações de vizinhança definidas no R m é construído um sistema linear cuja solução é uma projeção das instâncias restantes no fecho convexo de seus respectivos k vizinhos mais próximos 37 / 145
38 Least-Square Projection (LSP) Seja V i = {p i1,...,p iki } um conjunto de k i pontos em uma vizinhança de um ponto p i e p i sejam as coordenadas de p i no R d Suponha que as coordenadas p i sejam dadas pela seguinte equação p i pj V i α ij p j = 0 0 α ij 1; α ij = 1 (11) Quando α ij = 1 k i teremos p i no centróide dos pontos em V i 38 / 145
39 Least-Square Projection (LSP) A partir dessa equação é definido um conjunto de sistemas lineares Lx 1 = 0, Lx 2 = 0, Lx d = 0 (12) Onde x 1,x 2,...,x d são os vetores contendo as coordenadas cartesianas dos pontos e L é a matriz n n cujas entradas são dadas por 1 i = j l ij = α ij p j V i 0 caso contrário 39 / 145
40 Least-Square Projection (LSP) Os pontos de controle são inseridos no sistema como novas linhas na matriz Assim, dado um conjunto de pontos de controle S c = {p c1,...,p cnc }, é possível re-escrever o sistema Ax = b (13) Em que A é uma matrix retangular (n + nc) n dada por ( ) { L 1 xj é um ponto de controle A =, c C ij = 0 caso contrário E b é o vetor: { 0 i n b i = x ic n < i n + nc 40 / 145
 (a)")
 Matrix Laplaciana.")
41 Least-Square Projection (LSP) (a) Grafo de vizinhança. (b) Matrix Laplaciana. 41 / 145
42 Least-Square Projection (LSP) O sistema linear com os pontos de controle apresenta rank-completo e pode ser resolvido aplicando-se mínimos quadrados Encontrar x que minimize Ax b 2, isto é, x = (A T A) 1 A T b 42 / 145
43 Exemplos de Projeção Figura: Processando documentos para visualização (bag-of-words). 43 / 145
.")
44 Exemplos de Projeção Figura: Projeção de coleção com artigos científicos (LSP). 44 / 145
.")
45 Exemplos de Projeção Figura: Projeção de coleção com artigos científicos (LSP). 45 / 145
.")
46 Exemplos de Projeção Figura: Projeção de coleção com artigos científicos (LSP). 46 / 145
.")
47 Exemplos de Projeção Figura: Projeção de coleção notícias curtas de jornal RSS (LSP). 47 / 145
48 Exemplos de Projeção Figura: Projeção de dados de sensores (PCA). 48 / 145
49 Exemplos de Projeção Figura: Projeção de dados de sensores (Force Scheme). 49 / 145
50 Exemplos de Projeção Figura: Projeção de dados de sensores (Force Scheme). Escolhendo o melhor sensor. 50 / 145
51 Exemplos de Projeção Figura: Projeção de dados de sensores (Force Scheme). Escolhendo o melhor sensor. 51 / 145
52 Exemplos de Projeção Figura: Projeção de dados de sensores (Force Scheme). Escolhendo o melhor sensor. 52 / 145
53 Exemplos de Projeção Figura: Projeção de dados de sensores (Force Scheme). Escolhendo o melhor sensor. 53 / 145
54 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 54 / 145
55 Técnicas baseadas em Pontos Outra técnica baseada em pontos bastante conhecida é a RadViz Para um conjunto m-dimensional, m âncoras são definidas e posicionadas uniformemente ao longo de uma circunferência 55 / 145
56 Técnicas baseadas em Pontos Outra técnica baseada em pontos bastante conhecida é a RadViz Para um conjunto m-dimensional, m âncoras são definidas e posicionadas uniformemente ao longo de uma circunferência Uma instância de dado é mapeada na posição v considerando uma circunferência de raio 1 centrada na origem, fazendo Seja ^x = (x 0,x 1,...,x m 1 ) o vetor normalizado representando uma instância ^x, e um conjunto de vetores unitários A, em que A j representa a j esima âncora no plano, o vetor v dá a posição de equilíbrio do ponto: m 1 (A j v)x j = 0 j=0 v = m 1 j=0 (A jx j ) m 1 j=0 x j 56 / 145
57 RadViz É importante considerar que ordenações diferentes das âncoras levarão a resultados diferentes Interação pode ajudar o usuário Técnicas que automaticamente maximizam o espalhamento dos pontos são boas alternativas 57 / 145
58 RadViz Figura: Diferentes ordenações das âncoras no RadViz. Preço do carro é mapeado para a cor do glifo. 58 / 145
59 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 59 / 145
60 Técnicas Baseadas em Linhas Nas representações usando linha, características dos dados podem ser percebidas por meio de cruzamentos, curvatura, etc. 60 / 145
")
61 Gráficos de Linhas Um gráfico de linha representa no eixo vertical a faixa de valores de difrentes atributos das instâncias e no horizontal alguma ordenação dessas instâncias Visualização univariada para poucas dimensões (atributos) 61 / 145
62 Gráficos de Linhas Sobreposição não deve ser empregada com muitas dimensões por problemas de oclusão 62 / 145
63 Gráficos de Linhas Sobreposição não deve ser empregada com muitas dimensões por problemas de oclusão Possíveis soluções Empilhar as linhas usando como base a dimensão anterior (difícil de avaliar o valor) 63 / 145
64 Gráficos de Linhas Sobreposição não deve ser empregada com muitas dimensões por problemas de oclusão Possíveis soluções Empilhar as linhas usando como base a dimensão anterior (difícil de avaliar o valor) Ordenar as instâncias com base em uma dimensão 64 / 145
 (c) (d) Figura:")

 sobreposição (b)")
")
65 Gráficos de Linhas (a) (b) (c) (d) Figura: Gráficos representando salários de professores em 100 universidades. (a) sobreposição (b) empilhamento (c) sobreposição ordenada (d) empilhamento ordenado. 65 / 145
66 Gráficos de Linhas Essa técnica só funciona se existir um relacionamento entre as unidades das diferentes dimensões 66 / 145
67 Gráficos de Linhas Essa técnica só funciona se existir um relacionamento entre as unidades das diferentes dimensões Possíveis soluções Múltiplos eixos verticais podem ser usados para as diferentes dimensões 67 / 145
68 Gráficos de Linhas Essa técnica só funciona se existir um relacionamento entre as unidades das diferentes dimensões Possíveis soluções Múltiplos eixos verticais podem ser usados para as diferentes dimensões Criar múltiplos gráficos empilhados coordenados 68 / 145

69 Coordenadas Paralelas Na técnica Coordenadas Paralelas, os eixos são paralelos (não ortogonais) espaçados uniformemente, e as instâncias de dados são polilinhas que interceptam esses eixos em uma posição determinada pelo valor do atributo associado ao eixo 69 / 145
70 Coordenadas Paralelas Na interpretação desse tipo de visualização podemos 70 / 145
71 Coordenadas Paralelas Na interpretação desse tipo de visualização podemos Localizar grupos de polilinhas semelhantes 71 / 145
72 Coordenadas Paralelas Na interpretação desse tipo de visualização podemos Localizar grupos de polilinhas semelhantes Localizar pontos de cruzamento 72 / 145
73 Coordenadas Paralelas Na interpretação desse tipo de visualização podemos Localizar grupos de polilinhas semelhantes Localizar pontos de cruzamento Localizar polilinhas diferentes 73 / 145

74 Coordenadas Paralelas Interpretar relações entre dimensões não consecutivas pode ser difícil Interação pode ajudar a superar esse problema 74 / 145
75 Coordenadas Paralelas Existem diversas variantes da técnica de coordenadas paralelas 75 / 145
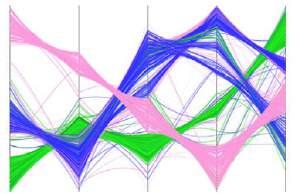
76 Coordenadas Paralelas Existem diversas variantes da técnica de coordenadas paralelas Coordenadas paralelas hierárquicas mostra agrupamentos e não os dados originais 76 / 145
77 Coordenadas Paralelas Existem diversas variantes da técnica de coordenadas paralelas Coordenadas paralelas hierárquicas mostra agrupamentos e não os dados originais Semi-transparência pode ser usada para mostrar grupos em grandes bases de dados 77 / 145
78 Coordenadas Paralelas Existem diversas variantes da técnica de coordenadas paralelas Coordenadas paralelas hierárquicas mostra agrupamentos e não os dados originais Semi-transparência pode ser usada para mostrar grupos em grandes bases de dados Agrupamento, re-ordenação e diferentes espaçamentos baseadas em correlação 78 / 145
79 Coordenadas Paralelas Existem diversas variantes da técnica de coordenadas paralelas Coordenadas paralelas hierárquicas mostra agrupamentos e não os dados originais Semi-transparência pode ser usada para mostrar grupos em grandes bases de dados Agrupamento, re-ordenação e diferentes espaçamentos baseadas em correlação Incorporação de histogramas nos eixos para ajudar na interpretação das distribuições 79 / 145
80 Coordenadas Paralelas Existem diversas variantes da técnica de coordenadas paralelas Coordenadas paralelas hierárquicas mostra agrupamentos e não os dados originais Semi-transparência pode ser usada para mostrar grupos em grandes bases de dados Agrupamento, re-ordenação e diferentes espaçamentos baseadas em correlação Incorporação de histogramas nos eixos para ajudar na interpretação das distribuições Usar curvas nos pontos de intersecção para melhorar a continuidade entre eixos 80 / 145
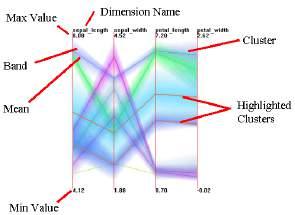
81 Coordenadas Paralelas 81 / 145
82 Curvas de Andrews Na técnica de Curvas de Andrews, cada ponto multivariado D = (d 1,d 2,...d N ) é usado para criar uma curva da forma f (t) = d d 2 sin(t) + d 3 cos(t) + d 4 sin(2t) + d 5 cos(2t) +... Com π t π Para número impar de dimensões o termo final é d N cos( N 1 2 t) e para número par é d N sin( N 2 t) 82 / 145


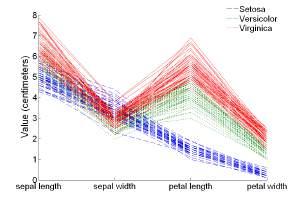
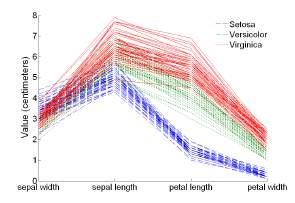
83 Curvas de Andrews Figura: Resultados da técnica de Curvas de Andrews usando diferentes ordenações das dimensões (dados da Iris). 83 / 145

84 Técnicas de Eixos Radiais Para cada técnica em que os eixos são paralelos existe uma correspondente com os eixos radiais Circular line graph é um exemplo, especialmente útil para eventos cíclicos 84 / 145
85 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 85 / 145
86 Técnicas baseadas em Região Técnicas baseadas em região apresentam valores empregando polígonos preenchidos mapeados para tamanho, cor, forma ou outros atributos Apesar das limitações cognitivas muitas técnicas vem sendo desenvolvidas 86 / 145


87 Gráficos de Barras e Histogramas Uma visualização muito empregada são os gráficos de barras (a) (b) Figura: Exemplos de gráficos de barras. (a) empilhados (b) agrupados. 87 / 145
88 Gráficos de Barras e Histogramas Se a tarefa é estudar a distribuição dos dados, pode-se usar histogramas Com valores nominais ou em um intervalo de poucos inteiros é simples mesmo número de barras quanto de valores distintos 88 / 145


89 Gráficos de Barras e Histogramas A versão 3D do gráfico de barras é conhecido como Cityscape Se todas as células forem populadas também recebe o nome de Histograma 3D Técnica bastante popular para dados geo-referenciados 89 / 145
90 Displays Tabulares No caso dos dados estarem organizados como uma tabela, visualizações podem ser facilmente geradas 90 / 145

91 Displays Tabulares Heatmaps mapeiam os valores de uma tabela em cores, renderizando-os como quadrados/retângulos coloridos 91 / 145
92 Displays Tabulares Pode aplicar Permutações e Reordenações de linhas ou colunas para melhorar a visualização Maximizar a diagonal 92 / 145

93 Displays Tabulares Survey Plots varia o tamanho das células ao invés de colorir Evita problemas de percepção causados por interferência em cores adjacentes 93 / 145

94 Displays Tabulares TableLens combina todas essas ideias e adiciona mecanismos que permitem visualizar uma tabela como um todo, assim como ter uma visão detalhada Procure por TableLens demo 94 / 145
95 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 95 / 145
96 Combinação de Técnicas Existe uma gama de técnicas que combinam características de duas ou mais classes de técnicas apresentadas A criação de glifos 96 / 145
97 Glifos e Ícones 97 / 145
98 Glifos e Ícones 98 / 145
99 Glifos e Ícones 99 / 145
100 Glifos e Ícones 100 / 145
101 Glifos e Ícones Alguns exemplos de glifos são 101 / 145
102 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras 102 / 145
103 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro 103 / 145
104 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios 104 / 145
105 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro 105 / 145
106 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. 106 / 145
107 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. Autoglyph cor de caixas 107 / 145
108 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. Autoglyph cor de caixas Boxes altura, comprimento, profundidade, etc. 108 / 145
109 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. Autoglyph cor de caixas Boxes altura, comprimento, profundidade, etc. Hedgehogs picos em um campo vetorial, com variação em orientação e espessura 109 / 145
110 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. Autoglyph cor de caixas Boxes altura, comprimento, profundidade, etc. Hedgehogs picos em um campo vetorial, com variação em orientação e espessura Faces tamanho e posição dos olhos, nariz, boca, etc. 110 / 145
111 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. Autoglyph cor de caixas Boxes altura, comprimento, profundidade, etc. Hedgehogs picos em um campo vetorial, com variação em orientação e espessura Faces tamanho e posição dos olhos, nariz, boca, etc. Arrows tamanho, comprimento, cor 111 / 145
112 Glifos e Ícones Alguns exemplos de glifos são Profiles altura e cor de barras Stars tamanho de raios igualmente espaçados emanando do centro Anderson/metroglyphs tamanho de raios Stick figures tamanho, ângulo, cor do membro Trees tamanho, espessura, ângulos dos ramos, etc. Autoglyph cor de caixas Boxes altura, comprimento, profundidade, etc. Hedgehogs picos em um campo vetorial, com variação em orientação e espessura Faces tamanho e posição dos olhos, nariz, boca, etc. Arrows tamanho, comprimento, cor etc. 112 / 145
113 Glifos e Ícones Figura: Exemplos de glifos multivariados. 113 / 145
114 Glifos e Ícones Na escolha do glifo vários aspectos devem ser considerados 114 / 145
115 Glifos e Ícones Na escolha do glifo vários aspectos devem ser considerados Viés imposto dependendo do atributo gráfico usado (linha pode ser melhor que orientação) 115 / 145
116 Glifos e Ícones Na escolha do glifo vários aspectos devem ser considerados Viés imposto dependendo do atributo gráfico usado (linha pode ser melhor que orientação) Glifos adjacentes serão mais facilmente comparados dos que os afastados 116 / 145
117 Glifos e Ícones Na escolha do glifo vários aspectos devem ser considerados Viés imposto dependendo do atributo gráfico usado (linha pode ser melhor que orientação) Glifos adjacentes serão mais facilmente comparados dos que os afastados Uma vez escolhido o glifo, existem N! possibilidades distintas de se mapear as dimensões às prorpeiedades visuais do glifo Qual a melhor escolha de mapeamento? 117 / 145
118 Glifos e Ícones Algumas estratégias para escolher o mapeamento 118 / 145
119 Glifos e Ícones Algumas estratégias para escolher o mapeamento Dimensões correlacionadas podem ser mapeadas para atributos visuais adjacentes ajuda a revelar padrões e outliers 119 / 145
120 Glifos e Ícones Algumas estratégias para escolher o mapeamento Dimensões correlacionadas podem ser mapeadas para atributos visuais adjacentes ajuda a revelar padrões e outliers Dimensões mapeadas de forma a compor glifos simétricos glifos assimétricos serão facilmente reconhecidos 120 / 145
121 Glifos e Ícones Algumas estratégias para escolher o mapeamento Dimensões correlacionadas podem ser mapeadas para atributos visuais adjacentes ajuda a revelar padrões e outliers Dimensões mapeadas de forma a compor glifos simétricos glifos assimétricos serão facilmente reconhecidos Dimensões podem ser mapeadas de acordo com seus valores em uma instância de referência 121 / 145
122 Glifos e Ícones Algumas estratégias para escolher o mapeamento Dimensões correlacionadas podem ser mapeadas para atributos visuais adjacentes ajuda a revelar padrões e outliers Dimensões mapeadas de forma a compor glifos simétricos glifos assimétricos serão facilmente reconhecidos Dimensões podem ser mapeadas de acordo com seus valores em uma instância de referência Dimensões podem ser mapeadas manualmente, de acordo com o conhecimento do usuário 122 / 145
123 Glifos e Ícones Existem três diferentes estratégias de layout (posicionamento) 123 / 145
124 Glifos e Ícones Existem três diferentes estratégias de layout (posicionamento) uniforme: glifos são escalados e posicionados com espaçamento uniforme para ocupar a tela inteira evita sobreposições 124 / 145
125 Glifos e Ícones Existem três diferentes estratégias de layout (posicionamento) uniforme: glifos são escalados e posicionados com espaçamento uniforme para ocupar a tela inteira evita sobreposições dirigido-a-dados: os valores de dados determinam a posição dos glifos podem ser posicionados usando scatterplots ou projeções multidimensionais 125 / 145
126 Glifos e Ícones Existem três diferentes estratégias de layout (posicionamento) uniforme: glifos são escalados e posicionados com espaçamento uniforme para ocupar a tela inteira evita sobreposições dirigido-a-dados: os valores de dados determinam a posição dos glifos podem ser posicionados usando scatterplots ou projeções multidimensionais dirigido-a-estrutura: se existir alguma estrutura implícita, como cíclica ou hierárquica, essa pode ser usada para posicionar os glifos 126 / 145
127 Glifos e Ícones Figura: Exemplos de posicionamento de glifos uniforme. 127 / 145
 usando dimensões (b) usando PCA.")
128 Glifos e Ícones (a) (b) Figura: Exemplos de posicionamento de glifos dirigido-a-dados. (a) usando dimensões (b) usando PCA. 128 / 145

 estrutura em espiral (b)")
129 Glifos e Ícones (a) Figura: Exemplos de posicionamento de glifos dirigido-a-estrutura. (a) estrutura em espiral (b) estrutura hierárquica. (b) 129 / 145
130 Display Denso de Pixels Display Denso de Pixels (técnicas orientadas-a-pixel) mapeiam cada valor para pixels individuais e criam um polígono preenchido para representar cada dimensão dos dados Fazem uso completo do espaço de tela Cada valor de dado define a cor do pixel 130 / 145
131 Display Denso de Pixels Na forma mais simples, cada dimensão irá gerar uma imagem no display 131 / 145
132 Display Denso de Pixels Na forma mais simples, cada dimensão irá gerar uma imagem no display Os elementos precisam ser desenhados de forma que elementos próximos fiquem próximos 132 / 145
133 Display Denso de Pixels Na forma mais simples, cada dimensão irá gerar uma imagem no display Os elementos precisam ser desenhados de forma que elementos próximos fiquem próximos Pode-se criar uma imagem fazendo uma travessia da esquerda-para-direita da direita-para-esquerda 133 / 145
134 Display Denso de Pixels Na forma mais simples, cada dimensão irá gerar uma imagem no display Os elementos precisam ser desenhados de forma que elementos próximos fiquem próximos Pode-se criar uma imagem fazendo uma travessia da esquerda-para-direita da direita-para-esquerda Pode-se usar uma travessia em espiral 134 / 145
135 Display Denso de Pixels Na forma mais simples, cada dimensão irá gerar uma imagem no display Os elementos precisam ser desenhados de forma que elementos próximos fiquem próximos Pode-se criar uma imagem fazendo uma travessia da esquerda-para-direita da direita-para-esquerda Pode-se usar uma travessia em espiral Pode-se uma curva recursiva para preenchimento do layout (pontos próximos na lista ficam próximos no display) 135 / 145


136 Display Denso de Pixels Figura: Exemplos de padrões de layout para displays densos de pixels. 136 / 145


137 Display Denso de Pixels As imagens de cada dimensão podem ser posicionadas na tela de várias formas, como em um grade ou em segmentos de círculo 137 / 145

138 Display Denso de Pixels Outra possibilidade é usar algum método de projeção para posicionar as dimensões similares proximamente 138 / 145
139 Display Denso de Pixels A ordenação dos dados (quando possível) pode ajudar a identificação de padrões interessantes 139 / 145
140 Display Denso de Pixels A ordenação dos dados (quando possível) pode ajudar a identificação de padrões interessantes Ordenar com base em uma dimensão (atriubto) ajudar a revelar agrupamentos dentro dessa dimensão 140 / 145
141 Display Denso de Pixels A ordenação dos dados (quando possível) pode ajudar a identificação de padrões interessantes Ordenar com base em uma dimensão (atriubto) ajudar a revelar agrupamentos dentro dessa dimensão Ordenar com base na distância a um vetor n-dimensional ajuda a revelar agrupamentos em várias dimensões 141 / 145
 dados ordenados com base em número de full professors.")
142 Display Denso de Pixels (a) Figura: Exemplos de diferentes ordenações. (a) dados ordenados com base no salário dos professores. Existe pouca correlação com outros atributos. (b) dados ordenados com base em número de full professors. Somente relacionado com o número total de empregados. (b) 142 / 145
 cor representa o mês (b) cor representa o valor da compra (c) cor representa o número de visitas (d) cor representa a quantidade comprada.")
143 Display Denso de Pixels Outra opção consiste em posicionar os pixels sobre gráficos de barras padrão Figura: Exemplo de visualização de atividades de compra online por meio de pixel bar charts. (a) cor representa o mês (b) cor representa o valor da compra (c) cor representa o número de visitas (d) cor representa a quantidade comprada. 143 / 145
144 Sumário 1 Introdução 2 Técnicas baseadas em Ponto Scatterplots Projeção Multidimensional Outras Técnicas 3 Técnicas baseadas em Linhas 4 Técnicas baseadas em Região 5 Combinação de Técnicas 6 Referências 144 / 145
145 Referências I Ward, M., Grinstein, G. G., Keim, D. Interactive data visualization foundations, techniques, and applications. Natick, Mass., A K Peters, Borg, I. and Groenen, P. J. F. (2005). Modern Multidimensional Scaling: Theory and Applications. Springer, second edition. Jolliffe, I. T. (1986). Principal Component Analysis. Springer-Verlag. Paulovich, F. V., Nonato, L. G., Minghim, R., and Levkowitz, H. (2008). Least square projection: A fast high-precision multidimensional projection technique and its application to document mapping. IEEE Trans. Visual. Comp. Graph., 14(3): Pekalska, E., de Ridder, D., Duin, R. P. W., and Kraaijveld, M. A. (1999). A new method of generalizing Sammon mapping with application to algorithm speed-up. In Boasson, M., Kaandorp, J. A., Tonino, J. F. M., and Vosselman, M. G., editors, Annual Conf. Advanced School for Comput. Imag., pages / 145
146 Referências II Sammon, J. W. (1969). A nonlinear mapping for data structure analysis. IEEE Trans. Comput., 18(5): Tejada, E., Minghim, R., and Nonato, L. G. (2003). On improved projection techniques to support visual exploration of multidimensional data sets. Information Visualization, 2(4): / 145
Projeções Multi-dimensionais
 Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP) 23 de setembro de 2010 Introdução
Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP) 23 de setembro de 2010 Introdução
Técnicas de Visualização para Dados Multivariados
 Técnicas de Visualização para Dados Multivariados SCC5836/SCC0252 Visualização Computacional Profa. Maria Cristina cristina@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Técnicas de Visualização para Dados Multivariados SCC5836/SCC0252 Visualização Computacional Profa. Maria Cristina cristina@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Técnicas de Visualização para Árvores, Grafos e Redes
 Técnicas de Visualização para Árvores, Grafos e Redes SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas
Técnicas de Visualização para Árvores, Grafos e Redes SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas
Fundamentos em Visualização
 Fundamentos em Visualização SCC5836 Visualização Computacional Profa. Maria Cristina cristina@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP) 1 / 92
Fundamentos em Visualização SCC5836 Visualização Computacional Profa. Maria Cristina cristina@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP) 1 / 92
Fundamentos em Visualização
 Fundamentos em Visualização SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC)
Fundamentos em Visualização SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC)
Fundamentos dos Dados
 Fundamentos dos Dados SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Fundamentos dos Dados SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Fundamentos dos Dados
 Fundamentos dos Dados SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Fundamentos dos Dados SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Técnicas de Visualização para Dados Espaciais
 Técnicas de Visualização para Dados Espaciais SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de
Técnicas de Visualização para Dados Espaciais SCC5836 Visualização Computacional Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais. Prof. Adilson Gonzaga
 Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
SCC0173 Mineração de Dados Biológicos
 SCC073 Mineração de Dados Biológicos Análise Exploratória de Dados Parte A: Revisão de Estatística Descritiva Elementar Prof. Ricardo J. G. B. Campello SCC / ICMC / USP Tópicos Análise Exploratória de
SCC073 Mineração de Dados Biológicos Análise Exploratória de Dados Parte A: Revisão de Estatística Descritiva Elementar Prof. Ricardo J. G. B. Campello SCC / ICMC / USP Tópicos Análise Exploratória de
Processo de Visualização - Modelo de Referência (Card et al. 1999) Maria Cristina F. de Oliveira Rosane Minghim. Classificação (Keim 1996, 2000)
 Maria Cristina F. de Oliveira Rosane Minghim. Classificação (Keim 1996, 2000)") Técnicas e Taxonomias de Visualização de Informação Processo de Visualização - Modelo de Referência (Card et al. 1999) Parte II (2010) Maria Cristina F. de Oliveira Rosane Minghim Classificação (Keim 1996,
Técnicas e Taxonomias de Visualização de Informação Processo de Visualização - Modelo de Referência (Card et al. 1999) Parte II (2010) Maria Cristina F. de Oliveira Rosane Minghim Classificação (Keim 1996,
Aula 9 Representação e Descrição. Profa. Fátima Nunes AULA 9 / 1. Profa. Fátima L. S. Nunes
 Fundamentos de Processamento Gráfico Aula 9 Representação e Descrição Profa. Fátima Nunes AULA 9 / 1 Reconhecimento de padrões AULA 9 / 2 Após a segmentação dar significado aos objetos extraídos da cena.
Fundamentos de Processamento Gráfico Aula 9 Representação e Descrição Profa. Fátima Nunes AULA 9 / 1 Reconhecimento de padrões AULA 9 / 2 Após a segmentação dar significado aos objetos extraídos da cena.
Preenchimento de Polígonos
 Preenchimento de Polígonos SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Preenchimento de Polígonos SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Introdução. Ordenar significa colocar em ordem. Significa arranjar as amostras em termos de suas similaridades.
 Ordenação Introdução Ordenar significa colocar em ordem. Significa arranjar as amostras em termos de suas similaridades. Análises diretas e indiretas Análises diretas: Análises diretas são usadas para
Ordenação Introdução Ordenar significa colocar em ordem. Significa arranjar as amostras em termos de suas similaridades. Análises diretas e indiretas Análises diretas: Análises diretas são usadas para
Visualização de Informação Parte I (2010)
") Visualização de Informação Parte I (2010) Rosane Minghim Danilo Medeiros Eler Visualização de Informação Área que estuda a representação visual de dados mais abstratos, tais como Grafos Árvores Texto Registros
Visualização de Informação Parte I (2010) Rosane Minghim Danilo Medeiros Eler Visualização de Informação Área que estuda a representação visual de dados mais abstratos, tais como Grafos Árvores Texto Registros
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Técnicas de Visualização para Dados Espaciais
 Técnicas de Visualização para Dados Espaciais SCC5836/SCC0252 Visualização Computacional Profa. Maria Cristina cristina@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Técnicas de Visualização para Dados Espaciais SCC5836/SCC0252 Visualização Computacional Profa. Maria Cristina cristina@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Prof. Fernando V. Paulovich 3 de agosto de SCC Computação Gráca
 Dispositivos de Saída e SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Dispositivos de Saída e SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade
Análise de Componentes Principais Simbólicas
 Análise de Componentes Principais Simbólicas Universidade Federal de Pernambuco CIn.ufpe.br Análise de Componentes Principais O objetivo da análise de componentes principais é explicar a estrutura de variânciacovariância
Análise de Componentes Principais Simbólicas Universidade Federal de Pernambuco CIn.ufpe.br Análise de Componentes Principais O objetivo da análise de componentes principais é explicar a estrutura de variânciacovariância
Mapeamento de Dados Multi-dimensionais Integrando
 Mapeamento de Dados Multi-dimensionais Integrando Mineração e Visualização Fernando V. Paulovich e Rosane Minghim Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP)
Mapeamento de Dados Multi-dimensionais Integrando Mineração e Visualização Fernando V. Paulovich e Rosane Minghim Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo (USP)
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Geometria Computacional
 Geometria Computacional Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Aspectos teóricos e práticos Construção e análise de algoritmos e estruturas de dados para a solucionar problemas geométricos
Geometria Computacional Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Aspectos teóricos e práticos Construção e análise de algoritmos e estruturas de dados para a solucionar problemas geométricos
RECONHECIMENTO IDENTIFICAÇÃO BASEADA EM APARÊNCIA
 RECONHECIMENTO IDENTIFICAÇÃO BASEADA EM APARÊNCIA Envolve a pergunta: É esta parte da imagem uma parte do objeto X? (modelo dado, região da imagem dada) Utiliza imagens ao invés de características como
RECONHECIMENTO IDENTIFICAÇÃO BASEADA EM APARÊNCIA Envolve a pergunta: É esta parte da imagem uma parte do objeto X? (modelo dado, região da imagem dada) Utiliza imagens ao invés de características como
Agrupamento de dados. Critério 1: grupos são concentrações de dados k-means Critério 2: grupos são conjuntos de elementos próximos entre si espectral
 Agrupamento de dados Critério 1: grupos são concentrações de dados k-means Critério 2: grupos são conjuntos de elementos próximos entre si espectral Dados e grafos Se temos dados x i, i 0... n, criamos
Agrupamento de dados Critério 1: grupos são concentrações de dados k-means Critério 2: grupos são conjuntos de elementos próximos entre si espectral Dados e grafos Se temos dados x i, i 0... n, criamos
4 Extração direta das PELs
 4 Extração direta das PELs A detecção de arestas em imagens está relacionada à extração de feições, sendo uma ferramenta fundamental em processamento de imagens e visão computacional. Essa detecção visa
4 Extração direta das PELs A detecção de arestas em imagens está relacionada à extração de feições, sendo uma ferramenta fundamental em processamento de imagens e visão computacional. Essa detecção visa
4 Estado da Arte do Kernel PCA
 4 Estado da Arte do Kernel PCA Conforme apresentado no Capítulo 1, o Kernel PCA é uma técnica promissora para auxiliar no processo de ajuste de histórico, devido a sua capacidade de extrair parte da estatística
4 Estado da Arte do Kernel PCA Conforme apresentado no Capítulo 1, o Kernel PCA é uma técnica promissora para auxiliar no processo de ajuste de histórico, devido a sua capacidade de extrair parte da estatística
PMR2560 Visão Computacional Visão estéreo. Prof. Eduardo L. L. Cabral
 PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
Introdução ao Processamento e Síntese de imagens -Linhas e superfícies escondidas
 Introdução ao Processamento e Síntese de imagens -Linhas e superfícies escondidas Júlio Kiyoshi Hasegawa 26 Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Introdução Linhas e superfícies
Introdução ao Processamento e Síntese de imagens -Linhas e superfícies escondidas Júlio Kiyoshi Hasegawa 26 Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Introdução Linhas e superfícies
UNIFEI - UNIVERSIDADE FEDERAL DE ITAJUBÁ
 UNIFEI - UNIVERSIDADE FEDERAL DE ITAJUBÁ PROVA DE CÁLCULO 1 e 2 PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR - 29/11/2015 CANDIDATO: CURSO PRETENDIDO: OBSERVAÇÕES:
UNIFEI - UNIVERSIDADE FEDERAL DE ITAJUBÁ PROVA DE CÁLCULO 1 e 2 PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR - 29/11/2015 CANDIDATO: CURSO PRETENDIDO: OBSERVAÇÕES:
Excel INTERMEDIÁRIO. Prof. Cassiano Isler Turma 3
 INTERMEDIÁRIO Gráficos Prof. Cassiano Isler 2017.1 - Turma 3 por Prof. Cassiano Isler INTERMEDIÁRIO - Aula 1 2 / 67 por GÓMEZ, Luis Alberto. para engenheiros. Visual Books, 2009. Capítulo 2. Disponível
INTERMEDIÁRIO Gráficos Prof. Cassiano Isler 2017.1 - Turma 3 por Prof. Cassiano Isler INTERMEDIÁRIO - Aula 1 2 / 67 por GÓMEZ, Luis Alberto. para engenheiros. Visual Books, 2009. Capítulo 2. Disponível
Modelagem Computacional. Parte 8 2
 Mestrado em Modelagem e Otimização - RC/UFG Modelagem Computacional Parte 8 2 Prof. Thiago Alves de Queiroz 2/2016 2 [Cap. 10 e 11] BURDEN, R. L.; FAIRES, J. D. Numerical Analysis (9th ed). Cengage Learning,
Mestrado em Modelagem e Otimização - RC/UFG Modelagem Computacional Parte 8 2 Prof. Thiago Alves de Queiroz 2/2016 2 [Cap. 10 e 11] BURDEN, R. L.; FAIRES, J. D. Numerical Analysis (9th ed). Cengage Learning,
Clustering - c-means e Self Organizing Maps
 - c-means e Self Organizing Maps Sarajane M. Peres e Clodoaldo A. M. Lima 13 de abril de 2015 Material baseado em: HAN, J. & KAMBER, M. Data Mining: Concepts and Techniques. 2nd. 2006 FAUSETT, L. Fundamentals
- c-means e Self Organizing Maps Sarajane M. Peres e Clodoaldo A. M. Lima 13 de abril de 2015 Material baseado em: HAN, J. & KAMBER, M. Data Mining: Concepts and Techniques. 2nd. 2006 FAUSETT, L. Fundamentals
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 04 - sistemas lineares Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos decomposições (álgebra linear) decomposição QR decomposição
Processamento de Imagens CPS755 aula 04 - sistemas lineares Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos decomposições (álgebra linear) decomposição QR decomposição
Autovalores e Autovetores
 Algoritmos Numéricos II / Computação Científica Autovalores e Autovetores Lucia Catabriga 1 1 DI/UFES - Brazil Junho 2016 Introdução Ideia Básica Se multiplicarmos a matriz por um autovetor encontramos
Algoritmos Numéricos II / Computação Científica Autovalores e Autovetores Lucia Catabriga 1 1 DI/UFES - Brazil Junho 2016 Introdução Ideia Básica Se multiplicarmos a matriz por um autovetor encontramos
4 Implementação Computacional
 4 Implementação Computacional 4.1. Introdução Neste capítulo é apresentada a formulação matemática do problema de otimização da disposição das linhas de ancoragem para minimizar os deslocamentos (offsets)
4 Implementação Computacional 4.1. Introdução Neste capítulo é apresentada a formulação matemática do problema de otimização da disposição das linhas de ancoragem para minimizar os deslocamentos (offsets)
2 Núcleos: suas propriedades e classificações
 2 Núcleos: suas propriedades e classificações O objetivo desse capítulo é o de apresentar as funções núcleos (7), suas propriedades (10) e suas classificações (3). 2.1 Núcleos no espaço de Hilbert Um espaço
2 Núcleos: suas propriedades e classificações O objetivo desse capítulo é o de apresentar as funções núcleos (7), suas propriedades (10) e suas classificações (3). 2.1 Núcleos no espaço de Hilbert Um espaço
Escola Naval 2010 ( ) ( ) 8 ( ) 4 ( ) 4 (
 ( ) 8 ( ) 4 ( ) 4 (") Escola Naval 0 1. (EN 0) Os gráficos das funções reais f e g de variável real, definidas por f(x) = x e g(x) = 5 x interceptam-se nos pontos A = (a,f(a)) e B = (b,f(b)), a b. Considere os polígonos CAPBD
Escola Naval 0 1. (EN 0) Os gráficos das funções reais f e g de variável real, definidas por f(x) = x e g(x) = 5 x interceptam-se nos pontos A = (a,f(a)) e B = (b,f(b)), a b. Considere os polígonos CAPBD
Visualização em 3-D - Projeções Planares
 Visualização em 3-D - Projeções Planares Projetores PRP - Centro de Projeção A n (u,v,n) - sistema de coordenadas do plano de projeção (x,y,z) - sistema de coordenadas do objeto (regra da mão direita -
Visualização em 3-D - Projeções Planares Projetores PRP - Centro de Projeção A n (u,v,n) - sistema de coordenadas do plano de projeção (x,y,z) - sistema de coordenadas do objeto (regra da mão direita -
2 Processo de Agrupamentos
 20 2 Processo de Agrupamentos A análise de agrupamentos pode ser definida como o processo de determinação de k grupos em um conjunto de dados. Para entender o que isso significa, observe-se a Figura. Y
20 2 Processo de Agrupamentos A análise de agrupamentos pode ser definida como o processo de determinação de k grupos em um conjunto de dados. Para entender o que isso significa, observe-se a Figura. Y
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 11 de novembro de 2016 Fluxo óptico Usado para estimar
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 11 de novembro de 2016 Fluxo óptico Usado para estimar
Aprendizado de Máquina (Machine Learning)
") Ciência da Computação (Machine Learning) Aula 02 Representação dos dados Pré-processamento Max Pereira Tipo de Dados Os atributos usados para descrever objetos de dados podem ser de diferentes tipos: Quantitativos
Ciência da Computação (Machine Learning) Aula 02 Representação dos dados Pré-processamento Max Pereira Tipo de Dados Os atributos usados para descrever objetos de dados podem ser de diferentes tipos: Quantitativos
Realce de imagens parte 1: operações pontuais SCC0251 Processamento de Imagens
 Realce de imagens parte 1: operações pontuais SCC0251 Processamento de Imagens Prof. Moacir Ponti Jr. www.icmc.usp.br/~moacir Instituto de Ciências Matemáticas e de Computação USP 2013/1 Moacir Ponti Jr.
Realce de imagens parte 1: operações pontuais SCC0251 Processamento de Imagens Prof. Moacir Ponti Jr. www.icmc.usp.br/~moacir Instituto de Ciências Matemáticas e de Computação USP 2013/1 Moacir Ponti Jr.
Para analisar os dados, pode-se tabular o número de vezes que cada quantidade de palavras ocorreu, que é a freqüência de cada quantidade:
 Tabelas e Diagramas de Freqüência Estatística Aplicada à Educação Antonio Roque Aula 2 O primeiro passo na análise e interpretação dos dados de uma amostra consiste na descrição (apresentação) dos dados
Tabelas e Diagramas de Freqüência Estatística Aplicada à Educação Antonio Roque Aula 2 O primeiro passo na análise e interpretação dos dados de uma amostra consiste na descrição (apresentação) dos dados
MAT Cálculo Diferencial e Integral para Engenharia III 2a. Lista de Exercícios - 1o. semestre de 2014
 MAT455 - Cálculo Diferencial e Integral para Engenharia III a. Lista de Exercícios - 1o. semestre de 014 1. Calcule as seguintes integrais de linha ao longo da curva indicada: x ds, (t) = (t 3, t), 0 t
MAT455 - Cálculo Diferencial e Integral para Engenharia III a. Lista de Exercícios - 1o. semestre de 014 1. Calcule as seguintes integrais de linha ao longo da curva indicada: x ds, (t) = (t 3, t), 0 t
VISÃO COMPUTACIONAL. Marcelo Henrique dos Santos
 VISÃO COMPUTACIONAL Marcelo Henrique dos Santos marcelosantos@outlook.com São Paulo SP, Agosto/2013 INTRODUÇÃO Processamento de imagens é um processo onde a entrada do sistema é uma imagem e a saída é
VISÃO COMPUTACIONAL Marcelo Henrique dos Santos marcelosantos@outlook.com São Paulo SP, Agosto/2013 INTRODUÇÃO Processamento de imagens é um processo onde a entrada do sistema é uma imagem e a saída é
Lista de Exercícios de Cálculo 3 Primeira Semana
 Lista de Exercícios de Cálculo 3 Primeira Semana Parte A 1. Se v é um vetor no plano que está no primeiro quadrante, faz um ângulo de π/3 com o eixo x positivo e tem módulo v = 4, determine suas componentes.
Lista de Exercícios de Cálculo 3 Primeira Semana Parte A 1. Se v é um vetor no plano que está no primeiro quadrante, faz um ângulo de π/3 com o eixo x positivo e tem módulo v = 4, determine suas componentes.
Modelagem Computacional. Parte 7 2
 Mestrado em Modelagem e Otimização - RC/UFG Modelagem Computacional Parte 7 2 Prof. Thiago Alves de Queiroz 2/2016 2 [Cap. 7] BURDEN, R. L.; FAIRES, J. D. Numerical Analysis (9th ed). Cengage Learning,
Mestrado em Modelagem e Otimização - RC/UFG Modelagem Computacional Parte 7 2 Prof. Thiago Alves de Queiroz 2/2016 2 [Cap. 7] BURDEN, R. L.; FAIRES, J. D. Numerical Analysis (9th ed). Cengage Learning,
Apontamentos III. Espaços euclidianos. Álgebra Linear aulas teóricas. Lina Oliveira Departamento de Matemática, Instituto Superior Técnico
 Apontamentos III Espaços euclidianos Álgebra Linear aulas teóricas 1 o semestre 2017/18 Lina Oliveira Departamento de Matemática, Instituto Superior Técnico Índice Índice i 1 Espaços euclidianos 1 1.1
Apontamentos III Espaços euclidianos Álgebra Linear aulas teóricas 1 o semestre 2017/18 Lina Oliveira Departamento de Matemática, Instituto Superior Técnico Índice Índice i 1 Espaços euclidianos 1 1.1
Física Computacional 18 matrizes: inversão, valores próprios e sol. da eq. De Schrödinger
 Física Computacional 18 matrizes: inversão, valores próprios e sol. da eq. De Schrödinger 1. Trabalhar com matrizes, e aplicá-las a um problema físico a. Inversão da matriz, eliminação de Gauss b. Determinante
Física Computacional 18 matrizes: inversão, valores próprios e sol. da eq. De Schrödinger 1. Trabalhar com matrizes, e aplicá-las a um problema físico a. Inversão da matriz, eliminação de Gauss b. Determinante
Resolvendo algebricamente um PPL
 Capítulo 6 Resolvendo algebricamente um PPL 6.1 O método algébrico para solução de um modelo linear A solução de problemas de programação linear com mais de duas variáveis, não pode ser obtida utilizando-se
Capítulo 6 Resolvendo algebricamente um PPL 6.1 O método algébrico para solução de um modelo linear A solução de problemas de programação linear com mais de duas variáveis, não pode ser obtida utilizando-se
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Considere a função f(x). Para algum x a f (x) pode não existir. Suponha que. Max f(x) s. a a x b
. Para algum x a f (x) pode não existir. Suponha que. Max f(x) s. a a x b") Considere a função f(x). Para algum x a f (x) pode não existir. Suponha que se queira resolver o seguinte PPNL: Max f(x) s. a a x b Pode ser que f (x) não exista ou que seja difícil resolver a equação
Considere a função f(x). Para algum x a f (x) pode não existir. Suponha que se queira resolver o seguinte PPNL: Max f(x) s. a a x b Pode ser que f (x) não exista ou que seja difícil resolver a equação
INTRODUÇÃO À CALIBRAÇÃO MULTIVARIADA
 INTRODUÇÃO À CALIBRAÇÃO MULTIVARIADA APLICAÇÃO NO CONTROLE DE QUALIDADE DE FÁRMACOS MÓDULO 05 Unidade Universitária de Ciências Exatas e Tecnológicas UnUCET Anápolis 1 2 MÓDULO 05 CALIBRAÇÃO MULTIVARIADA
INTRODUÇÃO À CALIBRAÇÃO MULTIVARIADA APLICAÇÃO NO CONTROLE DE QUALIDADE DE FÁRMACOS MÓDULO 05 Unidade Universitária de Ciências Exatas e Tecnológicas UnUCET Anápolis 1 2 MÓDULO 05 CALIBRAÇÃO MULTIVARIADA
Sumário. Traçado de Retas. Antialiasing e OpenGL. 1 Introdução. 2 Conversão Segmento de Reta. 3 Algoritmo DDA. 4 Algoritmo de Bresenham
 Conversão Matricial SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de
Conversão Matricial SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de
G3 de Álgebra Linear I
 G de Álgebra Linear I 7 Gabarito ) Considere a transformação linear T : R R cuja matriz na base canônica E = {(,, ), (,, ), (,, )} é [T] E = a) Determine os autovalores de T e seus autovetores correspondentes
G de Álgebra Linear I 7 Gabarito ) Considere a transformação linear T : R R cuja matriz na base canônica E = {(,, ), (,, ), (,, )} é [T] E = a) Determine os autovalores de T e seus autovetores correspondentes
Matrizes Semelhantes e Matrizes Diagonalizáveis
 Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Processamento de Imagens usando Grafos (MAC6903)
") Processamento de Imagens usando Grafos (MAC6903) Prof. Dr. Paulo A. V. de Miranda pmiranda@vision.ime.usp.br Instituto de Matemática e Estatística (IME), Universidade de São Paulo (USP) P.A.V. Miranda,
Processamento de Imagens usando Grafos (MAC6903) Prof. Dr. Paulo A. V. de Miranda pmiranda@vision.ime.usp.br Instituto de Matemática e Estatística (IME), Universidade de São Paulo (USP) P.A.V. Miranda,
Algoritmos geométricos
 Algoritmos geométricos introdução a conceitos básicos de geometria computacional que serão abordados de forma mais avançada na disciplina Computação Gráfica disciplina de computação gráfica arquitetura
Algoritmos geométricos introdução a conceitos básicos de geometria computacional que serão abordados de forma mais avançada na disciplina Computação Gráfica disciplina de computação gráfica arquitetura
Coordenadas Polares. Exemplos: Representar em um sistema de coordenadas polares, os seguintes pontos: d) P 4,
 P 4,") Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano, as coordenadas são números
Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano, as coordenadas são números
Representação e Descrição. Guillermo Cámara-Chávez
 Representação e Descrição Guillermo Cámara-Chávez Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem Para o reconhecimento do objeto é necessário descrever as propriedades
Representação e Descrição Guillermo Cámara-Chávez Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem Para o reconhecimento do objeto é necessário descrever as propriedades
Processamento de Imagens usando Grafos (MAC6903)
") Processamento de Imagens usando Grafos (MAC6903) Prof. Dr. Paulo A. V. de Miranda Instituto de Matemática e Estatística (IME), Universidade de São Paulo (USP) pmiranda@vision.ime.usp.br 1 / 20 Uma imagem
Processamento de Imagens usando Grafos (MAC6903) Prof. Dr. Paulo A. V. de Miranda Instituto de Matemática e Estatística (IME), Universidade de São Paulo (USP) pmiranda@vision.ime.usp.br 1 / 20 Uma imagem
Introdução aos Métodos Numéricos
 Introdução aos Métodos Numéricos Instituto de Computação UFF Departamento de Ciência da Computação Otton Teixeira da Silveira Filho Conteúdo Erros e Aproximações Numéricas Sistemas de Equações Lineares.
Introdução aos Métodos Numéricos Instituto de Computação UFF Departamento de Ciência da Computação Otton Teixeira da Silveira Filho Conteúdo Erros e Aproximações Numéricas Sistemas de Equações Lineares.
Guia do CFTV Sistemas de CFTV, IP, Seguranà a Eletrà nica, Conectividade, Informaà ões, Fórum e Tecnologia.
 VideoCAD - Software para Projeto de sistemas de CFTV Categoria : CFTV Publicado por Eng Marcelo Peres em 05-Aug-2009 01:30 Um projeto bem elaborado garantirá que as próximas etapas sejam feitas com uma
VideoCAD - Software para Projeto de sistemas de CFTV Categoria : CFTV Publicado por Eng Marcelo Peres em 05-Aug-2009 01:30 Um projeto bem elaborado garantirá que as próximas etapas sejam feitas com uma
Aula 8 - Reconhecimento e Interpretação. Prof. Adilson Gonzaga
 Aula 8 - Reconhecimento e Interpretação Prof. Adilson Gonzaga Elementos de Visão Computacional: Visão Computacional Processamento de Baio Nível Processamento de Nível Intermediário Processamento de Alto
Aula 8 - Reconhecimento e Interpretação Prof. Adilson Gonzaga Elementos de Visão Computacional: Visão Computacional Processamento de Baio Nível Processamento de Nível Intermediário Processamento de Alto
ANÁLISE DE COMPONENTES PRINCIPAIS/PCA ou ACP
 Procedimento para a determinação de novas variáveis (componentes) que expliquem a maior variabilidade possível existente em uma matriz de dados multidimensionais. ANÁLISE DE COMPONENTES PRINCIPAIS/PCA
Procedimento para a determinação de novas variáveis (componentes) que expliquem a maior variabilidade possível existente em uma matriz de dados multidimensionais. ANÁLISE DE COMPONENTES PRINCIPAIS/PCA
Curso de Geomática Aula 2. Prof. Dr. Irineu da Silva EESC-USP
 Curso de Geomática Aula Prof. Dr. Irineu da Silva EESC-USP Sistemas de Coordenadas Determinar a posição de um ponto, em Geomática, significa calcular as suas coordenadas. Calcular as coordenadas de um
Curso de Geomática Aula Prof. Dr. Irineu da Silva EESC-USP Sistemas de Coordenadas Determinar a posição de um ponto, em Geomática, significa calcular as suas coordenadas. Calcular as coordenadas de um
Mapas Auto-Organizáveis de Kohonen (SOM) SOM é uma rede neural artificial (Kohonen (1995))
 SOM é uma rede neural artificial (Kohonen (1995))") Mapas Auto-Organizáveis de Kohonen (SOM) SOM é uma rede neural artificial (Kohonen (1995)) que realiza simultaneamente agrupamento e visualização SOM usa aprendizagem não supervisionada para mapear dados
Mapas Auto-Organizáveis de Kohonen (SOM) SOM é uma rede neural artificial (Kohonen (1995)) que realiza simultaneamente agrupamento e visualização SOM usa aprendizagem não supervisionada para mapear dados
Universidade Federal do Rio de Janeiro - IM/DCC & NCE
 Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação
 Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação Francisco A. Rodrigues Departamento de Matemática Aplicada e Estatística - SME Conceitos básicos Classificação não-supervisionada:
Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação Francisco A. Rodrigues Departamento de Matemática Aplicada e Estatística - SME Conceitos básicos Classificação não-supervisionada:
INF Fundamentos da Computação Gráfica Professor: Marcelo Gattass Aluno: Rogério Pinheiro de Souza
 INF2608 - Fundamentos da Computação Gráfica Professor: Marcelo Gattass Aluno: Rogério Pinheiro de Souza Trabalho 02 Visualização de Imagens Sísmicas e Detecção Automática de Horizonte Resumo Este trabalho
INF2608 - Fundamentos da Computação Gráfica Professor: Marcelo Gattass Aluno: Rogério Pinheiro de Souza Trabalho 02 Visualização de Imagens Sísmicas e Detecção Automática de Horizonte Resumo Este trabalho
Dados no R n. Dados em altas dimensões 29/03/2017
 Dados no R n Dados em altas dimensões Alguns dados são apresentados como vetores em R n Alguns dados não são apresentados como vetores mas podem ser representados como vetores (e.g. Texto) Texto Dados
Dados no R n Dados em altas dimensões Alguns dados são apresentados como vetores em R n Alguns dados não são apresentados como vetores mas podem ser representados como vetores (e.g. Texto) Texto Dados
UNIVERSIDADE FEDERAL DE PERNAMBUCO Lista de Exercícios / Cálculo Numérico 1ª Unidade
 1) Analise as alternativas abaixo e marque V para verdadeiro e F para falso. No segundo caso, explique como as tornaria verdadeiras: ( ) O método das secantes é utilizado para solucionar um problema de
1) Analise as alternativas abaixo e marque V para verdadeiro e F para falso. No segundo caso, explique como as tornaria verdadeiras: ( ) O método das secantes é utilizado para solucionar um problema de
Introdução ao Processamento e Síntese de imagens Rendering 2016
 Introdução ao Processamento e Síntese de imagens Rendering 2016 Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Modelos de Iluminação A Computação Gráfica simula como os objetos refletem
Introdução ao Processamento e Síntese de imagens Rendering 2016 Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Modelos de Iluminação A Computação Gráfica simula como os objetos refletem
ÁLGEBRA LINEAR I - MAT0032
 UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERICANA Instituto Latino-Americano de Ciências da Vida e Da Natureza Centro Interdisciplinar de Ciências da Natureza ÁLGEBRA LINEAR I - MAT32 12 a Lista de exercícios
UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERICANA Instituto Latino-Americano de Ciências da Vida e Da Natureza Centro Interdisciplinar de Ciências da Natureza ÁLGEBRA LINEAR I - MAT32 12 a Lista de exercícios
Fundamentos da Eletrostática Aula 02 Cálculo Vetorial: derivadas
 Campo Escalar e Gradiente Fundamentos da Eletrostática Aula 02 Cálculo Vetorial: derivadas Prof. Alex G. Dias (alex.dias@ufabc.edu.br) Prof. Alysson F. Ferrari (alysson.ferrari@ufabc.edu.br) Um campo escalar
Campo Escalar e Gradiente Fundamentos da Eletrostática Aula 02 Cálculo Vetorial: derivadas Prof. Alex G. Dias (alex.dias@ufabc.edu.br) Prof. Alysson F. Ferrari (alysson.ferrari@ufabc.edu.br) Um campo escalar
1 a Lista de Exercícios MAT 3211 Álgebra Linear Prof. Vyacheslav Futorny
 1 a Lista de Exercícios MAT 3211 Álgebra Linear - 213 - Prof. Vyacheslav Futorny 1 a parte: Resolução de sistemas de equações lineares, matrizes inversíveis 1. Para cada um dos seguintes sistemas de equações
1 a Lista de Exercícios MAT 3211 Álgebra Linear - 213 - Prof. Vyacheslav Futorny 1 a parte: Resolução de sistemas de equações lineares, matrizes inversíveis 1. Para cada um dos seguintes sistemas de equações
Figura 9.1: Corpo que pode ser simplificado pelo estado plano de tensões (a), estado de tensões no interior do corpo (b).
, estado de tensões no interior do corpo (b).") 9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
FUNDAMENTOS DE SISTEMAS LINEARES PARTE 1
 FUNDAMENTOS DE SISTEMAS LINEARES PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Revisão O que é um corpo (campo)? O que é um espaço
FUNDAMENTOS DE SISTEMAS LINEARES PARTE 1 Prof. Iury V. de Bessa Departamento de Eletricidade Faculdade de Tecnologia Universidade Federal do Amazonas Revisão O que é um corpo (campo)? O que é um espaço
INTRODUÇÃO AO PROCESSAMENTO DIGITAL DE IMAGENS SENSORIAMENTO REMOTO
 INTRODUÇÃO AO PROCESSAMENTO DIGITAL DE IMAGENS SENSORIAMENTO REMOTO PROCESSAMENTO DE IMAGENS Introdução Conceitos básicos Pré-processamento Realce Classificação PROCESSAMENTO DE IMAGENS Extração de Informações
INTRODUÇÃO AO PROCESSAMENTO DIGITAL DE IMAGENS SENSORIAMENTO REMOTO PROCESSAMENTO DE IMAGENS Introdução Conceitos básicos Pré-processamento Realce Classificação PROCESSAMENTO DE IMAGENS Extração de Informações
Cinemática em 2D e 3D
 Cinemática em 2D e 3D o vetores posição, velocidade e aceleração o movimento com aceleração constante, movimento de projéteis o Cinemática rotacional, movimento circular uniforme Movimento 2D e 3D Localizar
Cinemática em 2D e 3D o vetores posição, velocidade e aceleração o movimento com aceleração constante, movimento de projéteis o Cinemática rotacional, movimento circular uniforme Movimento 2D e 3D Localizar
Processamento de Imagens usando Grafos (MAC6903)
") Processamento de Imagens usando Grafos (MAC6903) Prof. Dr. Paulo A. V. de Miranda pmiranda@vision.ime.usp.br Instituto de Matemática e Estatística (IME), Universidade de São Paulo (USP) P.A.V. Miranda
Processamento de Imagens usando Grafos (MAC6903) Prof. Dr. Paulo A. V. de Miranda pmiranda@vision.ime.usp.br Instituto de Matemática e Estatística (IME), Universidade de São Paulo (USP) P.A.V. Miranda
G2 de Álgebra Linear I
 G2 de Álgebra Linear I 2008.1 Gabarito 1) Decida se cada afirmação a seguir é verdadeira ou falsa e marque COM CANETA sua resposta no quadro a seguir. Itens V F N 1.a x 1.b x 1.c x 1.d x 1.e x 1.a) Suponha
G2 de Álgebra Linear I 2008.1 Gabarito 1) Decida se cada afirmação a seguir é verdadeira ou falsa e marque COM CANETA sua resposta no quadro a seguir. Itens V F N 1.a x 1.b x 1.c x 1.d x 1.e x 1.a) Suponha
Determinação de vícios refrativos oculares utilizando Support Vector Machines
 Determinação de vícios refrativos oculares utilizando Support Vector Machines Giampaolo Luiz Libralão, André Ponce de Leon F. de Carvalho, Antonio Valerio Netto, Maria Cristina Ferreira de Oliveira Instituto
Determinação de vícios refrativos oculares utilizando Support Vector Machines Giampaolo Luiz Libralão, André Ponce de Leon F. de Carvalho, Antonio Valerio Netto, Maria Cristina Ferreira de Oliveira Instituto
1) Seja o conjunto A = (0;1). Quantas relações binárias distintas podem ser definidas sobre o conjunto A?
 Seja o conjunto A = (0;1). Quantas relações binárias distintas podem ser definidas sobre o conjunto A?") RESUMO A relação binária é uma relação entre dois elementos, sendo um conjunto de pares ordenados. As relações binárias são comuns em muitas áreas da matemática. Um par ordenado consiste de dois termos,
RESUMO A relação binária é uma relação entre dois elementos, sendo um conjunto de pares ordenados. As relações binárias são comuns em muitas áreas da matemática. Um par ordenado consiste de dois termos,
3ª Igor/ Eduardo. Competência Objeto de aprendizagem Habilidade
 Matemática 3ª Igor/ Eduardo 9º Ano E.F. Competência Objeto de aprendizagem Habilidade C3 - Espaço e forma Números racionais. Números irracionais. Números reais. Relações métricas nos triângulos retângulos.
Matemática 3ª Igor/ Eduardo 9º Ano E.F. Competência Objeto de aprendizagem Habilidade C3 - Espaço e forma Números racionais. Números irracionais. Números reais. Relações métricas nos triângulos retângulos.
Projected Clustering Algorithm
 Projected Clustering Algorithm Emanuel Matos 5560105 Disciplina : Análise de Agrupamentos Prof. Dr. Ricardo Campello Dez/2010 View Problema Objetivo Definições/Premissas Algoritmo Acurácia Escalabilidade
Projected Clustering Algorithm Emanuel Matos 5560105 Disciplina : Análise de Agrupamentos Prof. Dr. Ricardo Campello Dez/2010 View Problema Objetivo Definições/Premissas Algoritmo Acurácia Escalabilidade
Coordenadas Polares. Exemplos: Representar em um sistema de coordenadas polares, os seguintes pontos: d) P 4,
 P 4,") Cálculo II Profa. Adriana Cherri 1 Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano,
Cálculo II Profa. Adriana Cherri 1 Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano,
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
MAP Exercício programa GPS e o Método de Newton
 MAP3121 - Exercício programa 1-2018 GPS e o Método de Newton O Sistema de Posicionamento Global O Sistema de Posicionamento Global (GPS, sigla do nome em inglês) é um sistema de navegação formado por uma
MAP3121 - Exercício programa 1-2018 GPS e o Método de Newton O Sistema de Posicionamento Global O Sistema de Posicionamento Global (GPS, sigla do nome em inglês) é um sistema de navegação formado por uma
GRÁFICOS. Profa. Raquel C. de Melo Minardi
 5 GRÁFICOS Profa. Raquel C. de Melo Minardi www.dcc.ufmg.br/~raquelcm raquelcm@dcc.ufmg.br Um aumento de 1% parece um aumento de 200% Quais aspectos do gráfico foram usados para causar este efeito? www.dcc.ufmg.br/~raquelcm
5 GRÁFICOS Profa. Raquel C. de Melo Minardi www.dcc.ufmg.br/~raquelcm raquelcm@dcc.ufmg.br Um aumento de 1% parece um aumento de 200% Quais aspectos do gráfico foram usados para causar este efeito? www.dcc.ufmg.br/~raquelcm
CÁLCULO IV - MAT Calcule a integral de linha do campo vetorial f ao longo da curva que indica-se em cada um dos seguintes itens.
 UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERIANA Instituto Latino-Americano de iências da Vida e da Natureza entro Interdisciplinar de iências da Natureza ÁLULO IV - MAT0041 1 a Lista de exercícios 1.
UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERIANA Instituto Latino-Americano de iências da Vida e da Natureza entro Interdisciplinar de iências da Natureza ÁLULO IV - MAT0041 1 a Lista de exercícios 1.