IFSC Paulo Bo Aul oni la I IFSC Paulo. Paulo Boni IFSC Paulo Boni. Boni IFSC Paulo Boni IFSC. Mecanismos e Dinâmica de. Máquinas
|
|
|
- Vanessa Brás Damásio
- 6 Há anos
- Visualizações:
Transcrição
1 Mecanismos e Dinâmica de Máquinas Prof. Pau ulo Paulo Bo Aul oni la I Paulo
2 Aula I - Conteúdo da disciplina - Avaliações Paulo Paulo - Horário do professor - Plano de aula Paulo - Livros Paulo
3 Paulo Conteúdo Bo da oni disciplina Paulo - Análise e Síntese de mecanismos - Mecanismos articulados - Cames Paulo - Engrenagens - etc...
4 CONCE EITO Paulo Cinemática e dinâm IFS mica SCde Paulo máquinas envolve projeto de máquinas em função dos Paulo movimentos requeridos. Paulo Mecani Paulo ismo é um componente de uma máquina que consiste de dois ou mais corpos arranjados de forma que o movimento de um produz o movimento dos outros
5 CONCE EITO Paulo Sínte ese Paulo é um procedimento no qual um produto é projetado para Paulo satisfazer um Bo con oni njunto de requisitos. Paulo Dado um conjunto de requisitos de performance, busca-se um mecanismo que satisfaça essas especificações Análise de mecanismos As dimensões Paulo de um mecan nismo são dadas e deseja- de movimento, Paulo se determinar suas características verificação se os requisito Pau os ulo de performance são satisfeito
6 CONCE EITO Cinemática estudo do Paulo movimento de Bo me oni ecanismos sem referência Paulo às forças que agem no sistema. Dinâmica Paulo é o estudo do movimento o de corpos Paulo individuais e mecanismos sobre a influência de forças e torques

7 Exemplos de Mecanismos Amassador de latas Paulo Prensa Limpador traseiro
8 Paulo Exemplos Bo de oni Mecanismos Paulo Move embalagens de uma bancada Paulo de montagem Paulo para uma esteira Paulo Suporte de microondas para Plataforma de elevação atender pessoas em cadeira Paulo Paulo de rodas
9 Exemplos de Mecanismos Plataforma de Paulo elevação Pá-carregadeira Dispositivo para fechar a tampa da caixa
10 Exemplos de Mecanismos Máquina de academia Projeto conceitual
11 Paulo Exemplos Bo de oni Mecanismos Paulo Paulo Posição Paulo estendida Posição Paulo Pauloflexionada Prótese de joelho com Paulo mecanismo de seis barras
12 Paulo Mecanismo Bo de oni quatro barras Paulo
13 Paulo Boboni Paulo Mecanismo biela-manivela


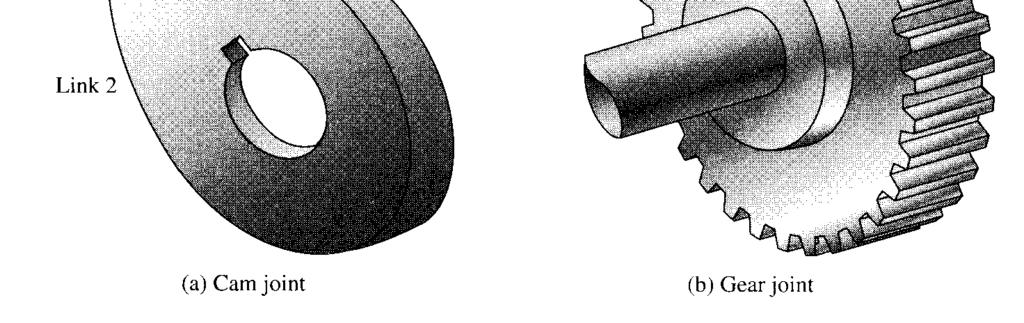
14 Paulo Bo cinoni Paulo Pares nemáticos
15 Tipos Paulo de moviment to em mecanismos Paulo A maioria das fontes de potência disponíveis possuem movimento rotacional puro (motor elétrico, manivela) ou translacional puro (cilindros Paulo hidráulicos e pneumáticos). Paulo Paulo Translação Bo par oni ra Translação Paulo
16 Tipos Paulo de movimen nto em mecanismos Paulo Rotação Pau para ulo Rotação
17 Tipos Paulo de movimen nto em mecanismos Paulo Rotação para translação
18 Categorias Paulode Bo Sínte oni ese de Mecanismos Paulo Mecanismos para Pau Ge ulo eração de Função Interessa o movimento relativo entre os elos. Mecanismo de quatro Pau barras utilizado ulo como freio de uma cadeira de rodas
19 Categorias Paulode Sínte ese de Mecanismos Paulo Mecanismos para Pau Geração ulode Função Mecanismo de quatro barras Pau apli ulo icado num irrigador de grama
20 Categorias Paulo de Síntes se de Mecanismos Paulo Mecanismos para Pau Ger ulo ração de Movimento Paulo Interessa o movimento o do elo intermediário Paulo Sistema de freio para roller
21 Categorias Paulode Sínte ese de Mecanismos Paulo Mecanismos para Pau Ger ulo ração de Movimento Mecanismo de quatro barras para abertura do compartimento do motor
 Guindaste Pau movimento uloem linha")
22 Categorias Paulode Sínte ese de Mecanismos Paulo Mecanismos para Geração de Percurso Paulo Interessa o percurso de um IFS pon SC nto isolado Paulo (ponto de interesse) Guindaste Pau movimento uloem linha reta

23 Paulo Bo Cames oni Paulo



24 Paulo Bo Cam oni mes Paulo
25 PauloEngrenagens Paulo

26 Paulo Bo En oni ngrenagens Paulo
27 PauloEngren nagens Paulo
28 Avalia Pau ações ulo Avaliações Paulo Bo 6 Avaliações Escrita oni as Paulo
29 Horário do professor TURNO Seg Ter Qua Quin Sex Mecanismos e Dinâmica ATENDIMENTO de Máquinas
30 Plano de Aula Carga horária: 40h Módulo VI Paulo Unidade Curricular: Mecanismos e dinâmica das Paulo máquinas Código: MDM62 Competências Paulo Habilidades Paulo Analisar cinematicamente e dinamicamente Reconhecer, analisar, especificar e sintetizar mecanismos. mecanismos. Bases Científicas e Tecnológicas - Conceitos e notações aplicadas a mecanismos; Paulo - Tipos de mecanismos; Paulo - Conceitos elementares de síntese dimensional de mecanismos articulados - Análise cinemática de cames planos e engrenagens de dentes retos e helicoidais; - Análise gráfica de velocidades; - Análise gráfica Paulo de acelerações; Paulo - Dinâmica dos cames; - Análise cinemática e síntese. - Dinâmica de Máquinas Paulo
31 Material de apoio Paulo Bibliografia Paulo Internet Paulo Cinemática e Dinâmica dos Mecanismos, Mc ROBERT L. NORTON Mecanismos e Dinâmica das Máquinas. IE-WILEY,1987. HAMINTON H. MABIE e FRED W. O. Theory of machines and mechanisms. Oxford USA Trade, SHIGLEY, J. E.; UICKER JR., J. J.; PENNOCK, G. Vibrações Mecânicas, Pearson Education - Br SINGIRESU S. RAO Vibrações Mecânicas Arthur Palmeira Ripper Neto Graw Hill
32 Paulo Programas genéricos Paulo Design View
33 Paulo Programas genéricos Paulo Mathc Pau cad ulo
34 Programas Paulo de modelagem 3D Paulo
35 Programas Paulo de modelagem 3D Paulo
36 Programas Paulo de modelagem 3D Paulo
37 Programas Paulo de modelagem 3D Paulo

38 Visualização Paulo simplificada Paulo 3D 2D
39 Processo Paulo de análise de um Paulo mecan Pau nismo ulo Paulo 10 IFS Passos SC Paulo
40 Paulo Processo de análise Paulo 1-Definição do mecanismo Pau e das ulo juntas
41 Paulo Processo de análise Paulo 2-Definição das entidades Pau dinâmic molas, amortecedores, gravi ulo cas: idade, atrito...
42 Paulo Processo de análise Paulo 3-Definição dos acionamentos: Pau motores, ulo atuadores...
43 Paulo Processo de análise Paulo 4-Definição das condições Pau iniciais: ulo posição, velocidade, aceleração
44 Paulo Processo de análise Paulo 5-Definição da análise: duração, Pau intervalo ulo de tempo,...
45 Paulo Processo de análise Paulo 6-Resultado da análise: movimen Pau nto, ulo forças atuantes
46 Paulo Processo de análise Paulo 7-Componente de interesse: Pau cargas ulo de pico, cargas de fadiga
47 Paulo Processo de análise Paulo 8-Componente de interesse: Pau propriedades ulo do material
48 Paulo Processo de análise Paulo 9-Componente de interesse: Pau refino ulo do carregamento
49 Paulo Processo de análise Paulo 10-Componente de interesse: Pau tensões ulo e deslocamentos
50 Canais de comunicação da Turma Horários destinado Pau os ulo para atendimento
IFSC Paulo Boni Aula I IFSC Paulo. Boni IFSC Prof. Paulo Boni Boni IFSC. Paulo Boni IFSC Paulo Boni
 Mecanismos e Dinâmica de Máquinas Prof. Aula I Aula I - Conteúdo da disciplina - Avaliações - Horário do professor - Plano de aula - Livros Conteúdo da disciplina - Análise e Síntese de mecanismos - Mecanismos
Mecanismos e Dinâmica de Máquinas Prof. Aula I Aula I - Conteúdo da disciplina - Avaliações - Horário do professor - Plano de aula - Livros Conteúdo da disciplina - Análise e Síntese de mecanismos - Mecanismos
Mecanismos e Dinâmicas de Máquinas MDM62
 Mecanismos e Dinâmicas de Máquinas MDM62 Curso Superior em Tecnologia Mecatrônica Industrial 6ª fase Prof.º Gleison Renan Inácio Sala 9 Bl 5 joinville.ifsc.edu.br/~gleison.renan Professor Gleison Renan
Mecanismos e Dinâmicas de Máquinas MDM62 Curso Superior em Tecnologia Mecatrônica Industrial 6ª fase Prof.º Gleison Renan Inácio Sala 9 Bl 5 joinville.ifsc.edu.br/~gleison.renan Professor Gleison Renan
Número de aulas 2 2 Número de semanas Horário. Sala: PG06 PG06
 UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE ENGENHARIA MECÂNICA PLANO DE AULAS Professor: Prof. Jorge Luiz Erthal ano - semestre: jorgeerthal@gmail.com Disciplina: TM348 Mecanismos 2016-2 segunda terça
UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE ENGENHARIA MECÂNICA PLANO DE AULAS Professor: Prof. Jorge Luiz Erthal ano - semestre: jorgeerthal@gmail.com Disciplina: TM348 Mecanismos 2016-2 segunda terça
Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia Recomendada. EESC-USP M. Becker /48
 SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM Aula 3 Tipos de Mecanismos: Simples e Complexos. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço?? 2 Pergunta da Aula
SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço?? 2 Pergunta da Aula
Tipos de Mecanismos: Simples e Complexos
 SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Prof. Dr. Marcelo Becker - SEM EESC USP Pergunta da Aula Passada Quantos GDLs possui o conjunto
SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Prof. Dr. Marcelo Becker - SEM EESC USP Pergunta da Aula Passada Quantos GDLs possui o conjunto
SEM Aula 2 Graus de Liberdade em Cadeias Cinemáticas. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM0104 - Aula 2 Graus de Liberdade em Cadeias Cinemáticas Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM Aula 2 Graus de Liberdade e Cadeias Cinemáticas. Prof. Assoc. Marcelo Becker
 SEM0104 - Aula 2 Graus de Liberdade e Cadeias Cinemáticas Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
SEM0104 - Aula 2 Graus de Liberdade e Cadeias Cinemáticas Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM Sumário da Aula Introdução Graus de Liberdade Cadeias Cinemáticas Exercícios Recomendados Bibliografia
Pergunta da Aula Passada
 SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço? EESC-USP M. Becker 2008
SEM0104 - Aula 3 Tipos de Mecanismos: Simples e Complexos Prof. Dr. Marcelo Becker SEM - EESC - USP Pergunta da Aula Passada Quantos GDLs possui o conjunto mão, ante-braço e braço? EESC-USP M. Becker 2008
Bibliografia Recomendada
 SEM0104 - Aula 10 Mecanismos de Deslizamento - Cames Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Seguidores Diagramas de Deslocamento Projeto de Perfis Exemplos de Aplicação Exercícios
SEM0104 - Aula 10 Mecanismos de Deslizamento - Cames Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Seguidores Diagramas de Deslocamento Projeto de Perfis Exemplos de Aplicação Exercícios
SEM Aula 10 Mecanismos de Deslizamento - Cames Prof. Dr. Marcelo Becker
 SEM0104 - Aula 10 Mecanismos de Deslizamento - Cames Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Seguidores Diagramas de Deslocamento Projeto de Perfis Exemplos de Aplicação Exercícios
SEM0104 - Aula 10 Mecanismos de Deslizamento - Cames Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Seguidores Diagramas de Deslocamento Projeto de Perfis Exemplos de Aplicação Exercícios
MECANISMOS TM Mecanismos (Definição) Algumas definições do termo mecanismos:
 Algumas definições do termo mecanismos:") MECANISMOS TM. INTRODUÇÃO. Mecanismos (Definição) Algumas definições do termo mecanismos: Mabie e Reinholtz definem mecanismo como a parte do projeto de uma máquina relacionada com a cinemática e cinética
MECANISMOS TM. INTRODUÇÃO. Mecanismos (Definição) Algumas definições do termo mecanismos: Mabie e Reinholtz definem mecanismo como a parte do projeto de uma máquina relacionada com a cinemática e cinética
Equacionamento de Links Mecanismos Simples Mecanismos Complexos Bibliografia Recomendada. EESC-USP M. Becker /36
 SEM0104 - Aula 7 Equacionamento de Mecanismos Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Notação Complexa Equacionamento de Links Mecanismos Simples Mecanismos Complexos Bibliografia Recomendada
SEM0104 - Aula 7 Equacionamento de Mecanismos Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Notação Complexa Equacionamento de Links Mecanismos Simples Mecanismos Complexos Bibliografia Recomendada
MÁQUINAS DE ELEVAÇÃO E TRANSPORTE
 MÁQUINAS DE ELEVAÇÃO E TRANSPORTE AULA 8 ACIONAMENTO E MECANISMOS DE ELEVAÇÃO PROF.: KAIO DUTRA Acionamento Manual e Alavanca de Comando Um acionamento manual pode ser empregado em mecanismos de baixa
MÁQUINAS DE ELEVAÇÃO E TRANSPORTE AULA 8 ACIONAMENTO E MECANISMOS DE ELEVAÇÃO PROF.: KAIO DUTRA Acionamento Manual e Alavanca de Comando Um acionamento manual pode ser empregado em mecanismos de baixa
SEM Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker
 SEM0104 - Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Informações sobre o Curso Introdução Histórico Exemplos de Aplicação 2/48 Informações sobre o Curso Aulas
SEM0104 - Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Informações sobre o Curso Introdução Histórico Exemplos de Aplicação 2/48 Informações sobre o Curso Aulas
SEM0 M Aul u a l a 1 Int n r t o r du d ç u ão ã e M o M ti t v i aç a ão ã Pro r f. D r. r Ma M r a c r elo l Becker SEM - EESC - USP
 SEM0104 - Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Informações sobre o Curso Introdução Histórico Exemplos de Aplicação 2/48 Informações sobre o Curso Aulas
SEM0104 - Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Informações sobre o Curso Introdução Histórico Exemplos de Aplicação 2/48 Informações sobre o Curso Aulas
SEM Aula 7 Equacionamento de Mecanismos. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 7 Equacionamento de Mecanismos Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Notação Complexa Equacionamento de Links Mecanismos Simples Mecanismos Complexos Exemplo Bibliografia
SEM0104 - Aula 7 Equacionamento de Mecanismos Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Notação Complexa Equacionamento de Links Mecanismos Simples Mecanismos Complexos Exemplo Bibliografia
Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos
 Modelagem de Sistemas de Rotação e Eletromecânicos") Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos
Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Modelagem de Sistemas de Rotação e Eletromecânicos
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DO PARÁ CAMPUS UNIVERSITÁRIO DE TUCURUÍ FACULDADE DE ENGENHARIA MECÂNICA
 PLANO DE PROCESSO SELETIVO SIMPLIFICADO PARA CONTRATAÇÃO DE PROFESSOR SUBSTITUTO (Base Legal: Lei n 8.745/93 e Resolução n 3.739/2008 CONSEPE) I IDENTIFICAÇÃO 1.1 - Unidade Acadêmica ou Regional:. 1.2
PLANO DE PROCESSO SELETIVO SIMPLIFICADO PARA CONTRATAÇÃO DE PROFESSOR SUBSTITUTO (Base Legal: Lei n 8.745/93 e Resolução n 3.739/2008 CONSEPE) I IDENTIFICAÇÃO 1.1 - Unidade Acadêmica ou Regional:. 1.2
Mecanismos de Deslizamento - Cames
 SEM0104 - Aula 11 Mecanismos de Deslizamento - Cames Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM EESC-USP M. Becker 2016 Sumário da Aula Introdução Seguidores Diagramas de Deslocamento Projeto
SEM0104 - Aula 11 Mecanismos de Deslizamento - Cames Prof. Assoc. Marcelo Becker USP - EESC - SEM LabRoM EESC-USP M. Becker 2016 Sumário da Aula Introdução Seguidores Diagramas de Deslocamento Projeto
SEM Aula 1 Introdução e Motivação. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker SEM - EESC - USP Prof. Dr. Marcelo Becker - SEM EESC USP Sumário da Aula Informações sobre o Curso Introdução Histórico Exemplos de Aplicação
SEM0104 - Aula 1 Introdução e Motivação Prof. Dr. Marcelo Becker SEM - EESC - USP Prof. Dr. Marcelo Becker - SEM EESC USP Sumário da Aula Informações sobre o Curso Introdução Histórico Exemplos de Aplicação
Alternador. Professor Diogo Santos Campos
 4. SISTEMA ELÉTRICO O sistema elétrico dos motores dos tratores agrícolas pode ser dividido em três partes, são elas: Produção: gerador e dispositivos de controle de corrente e tensão; Armazenamento: bateria;
4. SISTEMA ELÉTRICO O sistema elétrico dos motores dos tratores agrícolas pode ser dividido em três partes, são elas: Produção: gerador e dispositivos de controle de corrente e tensão; Armazenamento: bateria;
3 - IDENTIFICAÇÃO AUTOMAÇÃO E ROBÓTICA
 AUTOMAÇÃO E ROBÓTICA EEK557 T: 60 P: T+P: 60 4 EEK333 Dinâmica II (P) Introdução ao estudo do projeto, especificação e desempenho de sistemas automáticos e robôs industriais. Introdução à automação e robótica.
AUTOMAÇÃO E ROBÓTICA EEK557 T: 60 P: T+P: 60 4 EEK333 Dinâmica II (P) Introdução ao estudo do projeto, especificação e desempenho de sistemas automáticos e robôs industriais. Introdução à automação e robótica.
INTRODUÇÃO. Professor Claudemir Claudino Alves. Curso Superior de Tecnologia em - Refrigeração, Ventilação e Ar condicionado
 Curso Superior de Tecnologia em - Refrigeração, Ventilação e Ar condicionado Disciplina: ELEMENTOS DE MÁQUINAS INTRODUÇÃO Professor Me. Claudemir Claudino Alves Professor Claudemir Claudino Alves 2 OBJETIVO:
Curso Superior de Tecnologia em - Refrigeração, Ventilação e Ar condicionado Disciplina: ELEMENTOS DE MÁQUINAS INTRODUÇÃO Professor Me. Claudemir Claudino Alves Professor Claudemir Claudino Alves 2 OBJETIVO:
MODELAGEM E SIMULAÇÃO COMPUTACIONAL DE MECANISMOS
 ILHA SOLTEIRA XII Congresso Nacional de Estudantes de Engenharia Mecânica - 22 a 26 de agosto de 2005 - Ilha Solteira - SP Paper CRE05-EE08 MODELAGEM E SIMULAÇÃO COMPUTACIONAL DE MECANISMOS Paulo César
ILHA SOLTEIRA XII Congresso Nacional de Estudantes de Engenharia Mecânica - 22 a 26 de agosto de 2005 - Ilha Solteira - SP Paper CRE05-EE08 MODELAGEM E SIMULAÇÃO COMPUTACIONAL DE MECANISMOS Paulo César
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
SEM Aula 9 Engrenagens e Trens de Engrenagens Prof. Dr. Marcelo Becker
 SEM14 - Aula 9 Engrenagens e Trens de Engrenagens Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Representações Cinemática e Análise de Torque Montagens Transmissões Veiculares Software
SEM14 - Aula 9 Engrenagens e Trens de Engrenagens Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Representações Cinemática e Análise de Torque Montagens Transmissões Veiculares Software
Rolamentos Rígidos de Esferas
 Rolamentos Rígidos de Esferas Os rolamentos de esferas são extremamente comuns, pois eles podem lidar com ambas as cargas, radiais e axiais e são os mais amplamente utilizados devido a um conjunto de fatores:
Rolamentos Rígidos de Esferas Os rolamentos de esferas são extremamente comuns, pois eles podem lidar com ambas as cargas, radiais e axiais e são os mais amplamente utilizados devido a um conjunto de fatores:
Anaximandro Dalri Merizio Modalidade: Graduação
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICAS INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CÂMPUS ITAJAÍ PLANO DE ENSINO IDENTIFICAÇÃO Unidade Curricular:
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICAS INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CÂMPUS ITAJAÍ PLANO DE ENSINO IDENTIFICAÇÃO Unidade Curricular:
Atuadores e Sistemas Pneumáticos
 Atuadores e Sistemas Pneumáticos Aula 3 e 4 Prof. Dr. Emílio Carlos Nelli Silva Prof. Dr. Rafael Traldi Moura Atuadores Pneumáticos Classificação Atuador Linear (Movimento Linear): Cilindro de Simples
Atuadores e Sistemas Pneumáticos Aula 3 e 4 Prof. Dr. Emílio Carlos Nelli Silva Prof. Dr. Rafael Traldi Moura Atuadores Pneumáticos Classificação Atuador Linear (Movimento Linear): Cilindro de Simples
Atuadores e Sistemas Hidráulicos
 1 Atuadores e Sistemas Hidráulicos Prof. Dr. Emílio Carlos Nelli Silva Aula 1 Escola Politécnica da USP Departamento de Engenharia Mecatrônica e Sistemas Mecânicos Introdução 2 Hidráulica é o ramo da engenharia
1 Atuadores e Sistemas Hidráulicos Prof. Dr. Emílio Carlos Nelli Silva Aula 1 Escola Politécnica da USP Departamento de Engenharia Mecatrônica e Sistemas Mecânicos Introdução 2 Hidráulica é o ramo da engenharia
Órgãos de Máquinas II
 Órgãos de Máquinas II 7. Estudo Dinâmico de Engrenagens Adaptado e adotado para a unidade curricular por José R. Gomes / Departamento de Engenharia Mecânica a partir de materiais de apoio pedagógico em
Órgãos de Máquinas II 7. Estudo Dinâmico de Engrenagens Adaptado e adotado para a unidade curricular por José R. Gomes / Departamento de Engenharia Mecânica a partir de materiais de apoio pedagógico em
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec Paulino Botelho Código: 091 Município: São Carlos - SP Eixo Tecnológico: Controle
Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec Paulino Botelho Código: 091 Município: São Carlos - SP Eixo Tecnológico: Controle
VERIFICAÇÃO DE UMA ENGRENAGEM ATRAVÉS DE ELEMENTOS FINITOS
 UNIVERSIDADE FEDERAL DE MINAS GERAIS CURSO DE GRADUAÇÃO EM ENGENHARIA MECÂNICA VERIFICAÇÃO DE UMA ENGRENAGEM ATRAVÉS DE ELEMENTOS FINITOS ADLER SOARES ARAÚJO - 2001016594 VALDÉRIO RODRIGUES SILVA GALVÃO
UNIVERSIDADE FEDERAL DE MINAS GERAIS CURSO DE GRADUAÇÃO EM ENGENHARIA MECÂNICA VERIFICAÇÃO DE UMA ENGRENAGEM ATRAVÉS DE ELEMENTOS FINITOS ADLER SOARES ARAÚJO - 2001016594 VALDÉRIO RODRIGUES SILVA GALVÃO
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2017 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec Sylvio de Mattos Carvalho Código: 103 Município: Matão Eixo Tecnológico: Controle
Plano de Trabalho Docente 2017 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec Sylvio de Mattos Carvalho Código: 103 Município: Matão Eixo Tecnológico: Controle
Rendimentos em Transmissões Mecânicas
 Rendimentos em Transmissões Mecânicas NOME: Lucas Ribeiro Machado O que é Transmissões Mecânicas Transmissão mecânica são equipamentos ou mecanismo que tem a função de transmitir potência, torque ou rotação
Rendimentos em Transmissões Mecânicas NOME: Lucas Ribeiro Machado O que é Transmissões Mecânicas Transmissão mecânica são equipamentos ou mecanismo que tem a função de transmitir potência, torque ou rotação
Transmissão. Tomada de Força
 Transmissão Tomada de Força Prefácio Este módulo de treinamento refere-se a Tomada de Força. O módulo de treinamento é parte de uma série de módulos destinados ao Treinamento Básico de Transmissão. Este
Transmissão Tomada de Força Prefácio Este módulo de treinamento refere-se a Tomada de Força. O módulo de treinamento é parte de uma série de módulos destinados ao Treinamento Básico de Transmissão. Este
CAPÍTULO Ferramentas para modelagem. 2. Descrição de atuadores utilizados em sistemas mecatrônicos. 3. Sistema de transmissão
 CAPÍTULO 5 1. Ferramentas para modelagem de sistemas mecatrônicos 2. Descrição de atuadores utilizados em sistemas mecatrônicos 3. Sistema de transmissão mecânica 4. Sistemas de controle em malha aberta
CAPÍTULO 5 1. Ferramentas para modelagem de sistemas mecatrônicos 2. Descrição de atuadores utilizados em sistemas mecatrônicos 3. Sistema de transmissão mecânica 4. Sistemas de controle em malha aberta
Dados Técnicos Guindaste sobre esteiras LR 1300 LR 1300
 Dados Técnicos Guindaste sobre esteiras LR 1300 LR 1300 Dimensões Máquina básica com carro inferior R 9750 3600 10350 6930 3000 LR 1300 2250 1600 1465 5000 1700 8500 9650 4260 1870 1200 8000 400 R 6980
Dados Técnicos Guindaste sobre esteiras LR 1300 LR 1300 Dimensões Máquina básica com carro inferior R 9750 3600 10350 6930 3000 LR 1300 2250 1600 1465 5000 1700 8500 9650 4260 1870 1200 8000 400 R 6980
BIBLIOGRAFIA: Material em formato eletrônico e xerox a serem disponibilizados pelo professor ao longo do curso.
 Curso: ENGENHARIA MECATRÔNICA Disciplina: Circuitos Fluido Mecânicos Carga horária: 40 Semestre a ser aplicada: 7 ο O curso de Circuitos Fluido Mecânicos tem por objetivo fornecer as noções básicas sobre
Curso: ENGENHARIA MECATRÔNICA Disciplina: Circuitos Fluido Mecânicos Carga horária: 40 Semestre a ser aplicada: 7 ο O curso de Circuitos Fluido Mecânicos tem por objetivo fornecer as noções básicas sobre
SEM0 M Aul u a a 1 1 Sínt n e t se s d e d M e M can a i n sm s os s Pro r f. D r.r Ma M r a c r elo Becker SEM - EESC - USP
 SEM0104 - Aula 11 Síntese de Mecanismos Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Tipos de Síntese Erros de Trajetória Erros Estruturais Síntese de Mecanismos Exemplos Bibliografia
SEM0104 - Aula 11 Síntese de Mecanismos Prof. Dr. Marcelo Becker SEM - EESC - USP Sumário da Aula Introdução Tipos de Síntese Erros de Trajetória Erros Estruturais Síntese de Mecanismos Exemplos Bibliografia
Lei de Pascal. Elevador Hidráulico
 Lei de Pascal Princípio físico que rege o funcionamento de dispositivos hidráulicos, tais como, a direção hidráulica, freio hidráulico, elevador hidráulico, macaco hidráulico, etc... A variação de pressão
Lei de Pascal Princípio físico que rege o funcionamento de dispositivos hidráulicos, tais como, a direção hidráulica, freio hidráulico, elevador hidráulico, macaco hidráulico, etc... A variação de pressão
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Departamento de Engenharia Mecânica
 S (Automação e Robótica - EEK557) Introdução à automação e robótica Estudo de ambientes robotizados. Modelagem de cadeias cinemáticas abertas Cinemática e dinâmica. Planejamento de trajetórias. Apresentação
S (Automação e Robótica - EEK557) Introdução à automação e robótica Estudo de ambientes robotizados. Modelagem de cadeias cinemáticas abertas Cinemática e dinâmica. Planejamento de trajetórias. Apresentação
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Atuadores pneumáticos
 elcabral@usp.br 1 PMR2560 Robótica Atuadores pneumáticos Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Atuadores pneumáticos : Conceito; Sistemas pneumáticos ; Tipos principais; Dimensionamento.
elcabral@usp.br 1 PMR2560 Robótica Atuadores pneumáticos Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Atuadores pneumáticos : Conceito; Sistemas pneumáticos ; Tipos principais; Dimensionamento.
Mecanismos Mecanismos com 1 GL
 Mecanismos Mecanismos com GL Mecanismo de 4 barras Análise Geral Análise de Pontos de Interesse Prof. Jorge Luiz Erthal jorgeerthal@gmail.com Exemplos Guindaste 3 Bomba de extração de petróleo 4 Suspensão
Mecanismos Mecanismos com GL Mecanismo de 4 barras Análise Geral Análise de Pontos de Interesse Prof. Jorge Luiz Erthal jorgeerthal@gmail.com Exemplos Guindaste 3 Bomba de extração de petróleo 4 Suspensão
SEM Aula 4 Análise Gráfica de Velocidade em Mecanismos Prof. Dr. Marcelo Becker
 SEM0104 - ula 4 nálise Gráfica de Velocidade em Mecanismos Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da ula Mét. Gráfico nálise de Mecanismos Cálculo de Velocidade Centro Instantâneo de Rotação
SEM0104 - ula 4 nálise Gráfica de Velocidade em Mecanismos Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da ula Mét. Gráfico nálise de Mecanismos Cálculo de Velocidade Centro Instantâneo de Rotação
A combinação entre força e flexibilidade. WL 30 Carregadeiras de rodas: capacidade do balde < 0,65 m³
 WL 30 Carregadeiras de rodas: capacidade do balde < 0,65 m³ A combinação entre força e flexibilidade A carregadora Wacker Neuson WL30 desenvolve através do seu potente motor Perkins de 49 PS, em combinação
WL 30 Carregadeiras de rodas: capacidade do balde < 0,65 m³ A combinação entre força e flexibilidade A carregadora Wacker Neuson WL30 desenvolve através do seu potente motor Perkins de 49 PS, em combinação
APLICAÇÕES. Você vê engrenagens em quase tudo que tem partes giratórias. Transmissão de carro. Redutor de velocidade. Relógios
 APLICAÇÕES Você vê engrenagens em quase tudo que tem partes giratórias.. Transmissão de carro Redutor de velocidade Relógios 1 CURSO ENGENHARIA DE PRODUÇÃO DEFINIÇÃO: Engrenagens são rodas com dentes padronizados
APLICAÇÕES Você vê engrenagens em quase tudo que tem partes giratórias.. Transmissão de carro Redutor de velocidade Relógios 1 CURSO ENGENHARIA DE PRODUÇÃO DEFINIÇÃO: Engrenagens são rodas com dentes padronizados
Dinâmica. Prof.ª Betty Carvalho Rocha Gonçalves do Prado
 Dinâmica Prof.ª Betty Carvalho Rocha Gonçalves do Prado betty.prado@kroton.com.br bettycarvalho@ig.com.br CORPO RÍGIDO São corpos cuja dimensões não são desprezáveis Corpo rígido É um conceito limite ideal,
Dinâmica Prof.ª Betty Carvalho Rocha Gonçalves do Prado betty.prado@kroton.com.br bettycarvalho@ig.com.br CORPO RÍGIDO São corpos cuja dimensões não são desprezáveis Corpo rígido É um conceito limite ideal,
Bibliografia Recomendada
 SEM0104 - ula 4 nálise Gráfica de Velocidade em Mecanismos Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da ula Mét. Gráfico nálise de Mecanismos Cálculo de Velocidade Centro Instantâneo de Rotação
SEM0104 - ula 4 nálise Gráfica de Velocidade em Mecanismos Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da ula Mét. Gráfico nálise de Mecanismos Cálculo de Velocidade Centro Instantâneo de Rotação
1 Introdução. 1.1 Tecnologia Kopelrot
 1 Introdução O presente trabalho trata do projeto, construção e teste preliminar de um novo compressor rotativo, com a tecnologia Kopelrot. A tecnologia Kopelrot diz respeito à máquina de deslocamento
1 Introdução O presente trabalho trata do projeto, construção e teste preliminar de um novo compressor rotativo, com a tecnologia Kopelrot. A tecnologia Kopelrot diz respeito à máquina de deslocamento
SEM Aula 5 Cálculo da Velocidade: Velocidade Relativa. Prof. Dr. Marcelo Becker
 SEM0104 - Aula 5 Cálculo da Velocidade: Velocidade Relativa Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da Aula Método Gráfico Análise de Mecanismos Cálculo de Velocidade Velocidade Relativa Definição
SEM0104 - Aula 5 Cálculo da Velocidade: Velocidade Relativa Prof. Dr. Marcelo ecker SEM - EESC - USP Sumário da Aula Método Gráfico Análise de Mecanismos Cálculo de Velocidade Velocidade Relativa Definição
Conceitos Fundamentais de Mecânica
 LEB 332 - Mecânica e Máquinas Motoras Prof. J. P. Molin Conceitos Fundamentais de Mecânica Objetivo da aula Rever conceitos da Física, em especial da Mecânica, já conhecidos de todos, e que serão necessários
LEB 332 - Mecânica e Máquinas Motoras Prof. J. P. Molin Conceitos Fundamentais de Mecânica Objetivo da aula Rever conceitos da Física, em especial da Mecânica, já conhecidos de todos, e que serão necessários
Walter Fetter Lages. Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Aula 04 - Atuadores pneumáticos atuadores lineares e rotativos
 Aula 04 - Atuadores pneumáticos atuadores lineares e rotativos 1 - INTRODUÇÃO Os atuadores pneumáticos são componentes que transformam a energia do ar comprimido em energia mecânica, isto é, são elementos
Aula 04 - Atuadores pneumáticos atuadores lineares e rotativos 1 - INTRODUÇÃO Os atuadores pneumáticos são componentes que transformam a energia do ar comprimido em energia mecânica, isto é, são elementos
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
MOVIMENTO E DINAMISMO
 SOBRE O GRUPO REDUTEP ACIONAMENTOS REDUTEP INTEGRADORA MOVIMENTO E DINAMISMO www.redutep.com.br O GRUPO Redutep Soluções Industriais A divisão Acionamentos oferece os mais variados produtos e acessórios
SOBRE O GRUPO REDUTEP ACIONAMENTOS REDUTEP INTEGRADORA MOVIMENTO E DINAMISMO www.redutep.com.br O GRUPO Redutep Soluções Industriais A divisão Acionamentos oferece os mais variados produtos e acessórios
Módulo 1: Conteúdo programático Lei de Pascal. Estática dos Fluidos Lei de Pascal
 Módulo 1: Conteúdo programático Lei de Pascal Bibliografia: Bunetti, F. Mecânica dos Fluidos, São Paulo, Prentice Hall, 007. Estática dos Fluidos Lei de Pascal Em Estática dos Fluidos, analisaremos o comportamento
Módulo 1: Conteúdo programático Lei de Pascal Bibliografia: Bunetti, F. Mecânica dos Fluidos, São Paulo, Prentice Hall, 007. Estática dos Fluidos Lei de Pascal Em Estática dos Fluidos, analisaremos o comportamento
Projeto de um mecanismo capaz de reproduzir o fluxo de sangue na artéria
 UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA - DEPARTAMENTO DE ENGENHARIA MECÂNICA 942-S - MECANISMOS E DINÂMICA DAS MÁQUINAS Trabalho Projeto de um mecanismo capaz de
UNIVERSIDADE ESTADUAL PAULISTA JÚLIO DE MESQUITA FILHO FACULDADE DE ENGENHARIA - DEPARTAMENTO DE ENGENHARIA MECÂNICA 942-S - MECANISMOS E DINÂMICA DAS MÁQUINAS Trabalho Projeto de um mecanismo capaz de
3 Veículos Terrestres
 3 Veículos Terrestres Por se tratar de uma das primeiras dissertações do Programa de metrologia com aplicação à área veicular, optou-se pela inclusão neste capítulo de conceitos básicos que serão utilizados
3 Veículos Terrestres Por se tratar de uma das primeiras dissertações do Programa de metrologia com aplicação à área veicular, optou-se pela inclusão neste capítulo de conceitos básicos que serão utilizados
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Aluno Data Curso / Turma Professor
 Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
Apostila Modelagem e Simulação de Sistemas Dinâmicos Aluno Data Curso / Turma Professor 24/10/09 Engenharia Industrial Mecânica / 2006-1 MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS Everton Farina, Eng.º
ATUADORES E VÁLVULAS
 ATUADORES E VÁLVULAS ATUADORES Esses mecanismos são denominados atuadores, pois sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Os
ATUADORES E VÁLVULAS ATUADORES Esses mecanismos são denominados atuadores, pois sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Os
Instituto Federal de Educação Ciência e Tecnologia. Prof.: Carlos
 Instituto Federal de Educação Ciência e Tecnologia Campos de Presidente Epitácio LIDIANE FERREIRA Trabalho apresentado na disciplina de Elementos de Maquinas do Curso de Automação Industrial 3º módulo
Instituto Federal de Educação Ciência e Tecnologia Campos de Presidente Epitácio LIDIANE FERREIRA Trabalho apresentado na disciplina de Elementos de Maquinas do Curso de Automação Industrial 3º módulo
Automação da Manufatura
 Automação da Manufatura (Atuadores) Prof. Rodrigo Baleeiro Silva Eng. Mecânica 6º Período. Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através
Automação da Manufatura (Atuadores) Prof. Rodrigo Baleeiro Silva Eng. Mecânica 6º Período. Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através
Dinâmica das Máquinas
 Dinâmica das Máquinas Apresentação do curso Revisão dos fundamentos da dinâmica Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano
Dinâmica das Máquinas Apresentação do curso Revisão dos fundamentos da dinâmica Prof. Juliano G. Iossaqui Engenharia Mecânica Universidade Tecnológica Federal do Paraná (UTFPR) Londrina, 2017 Prof. Juliano
MODELAGEM MULTICORPOS DO MECANISMO BIELA MANIVELA INVERTIDO PARA APLICAÇÃO EM ENGENHARIA AUTOMOTIVA
 XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 São Carlos-SP Artigo CREEM2012 MODELAGEM MULTICORPOS DO MECANISMO BIELA MANIVELA INVERTIDO PARA APLICAÇÃO EM ENGENHARIA AUTOMOTIVA
XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 São Carlos-SP Artigo CREEM2012 MODELAGEM MULTICORPOS DO MECANISMO BIELA MANIVELA INVERTIDO PARA APLICAÇÃO EM ENGENHARIA AUTOMOTIVA
Campus de Botucatu PLANO DE ENSINO. DOCENTE RESPONSÁVEL: Prof. Dr. Marcos Antonio de Rezende
 PLANO DE ENSINO I IDENTIFICAÇÃO CURSO: Física Médica MODALIDADE: Bacharelado DISCIPLINA: Física I (X) OBRIGATÓRIA ( ) OPTATIVA DEPARTAMENTO: Física e Biofísica DOCENTE RESPONSÁVEL: Prof. Dr. Marcos Antonio
PLANO DE ENSINO I IDENTIFICAÇÃO CURSO: Física Médica MODALIDADE: Bacharelado DISCIPLINA: Física I (X) OBRIGATÓRIA ( ) OPTATIVA DEPARTAMENTO: Física e Biofísica DOCENTE RESPONSÁVEL: Prof. Dr. Marcos Antonio
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Serviço Público Federal Instituto Federal de Educação, Ciência e Tecnologia Sul-rio-grandense Pró-Reitoria de Ensino RESOLUÇÃO Nº 23/2017
 RESOLUÇÃO Nº 23/2017 O Pró-Reitor de Ensino do Instituto Federal de Educação, Ciência e Tecnologia Sul-rio-grandense, no uso de suas atribuições, considerando as decisões emanadas da reunião da Câmara
RESOLUÇÃO Nº 23/2017 O Pró-Reitor de Ensino do Instituto Federal de Educação, Ciência e Tecnologia Sul-rio-grandense, no uso de suas atribuições, considerando as decisões emanadas da reunião da Câmara
Unidade 1 Introdução. 1.1 Robôs industriais
 Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
PROJETO: GARRA HIDRÁULICA E MECÂNICA
 Gabriel de Martin Truzzi Grupo 9 Renan Pedroso Daniel Wiklich Sobrinho PROJETO: GARRA HIDRÁULICA E MECÂNICA HISTÓRICO DO PROJETO: Após a compra dos seguintes materiais: Kit soro Seringa Madeira Polia Elástico
Gabriel de Martin Truzzi Grupo 9 Renan Pedroso Daniel Wiklich Sobrinho PROJETO: GARRA HIDRÁULICA E MECÂNICA HISTÓRICO DO PROJETO: Após a compra dos seguintes materiais: Kit soro Seringa Madeira Polia Elástico
Fátima Pais. Movimento e Mecanismos. Operadores mecânicos. Educação Tecnológica
 Fátima Pais Movimento e Mecanismos Operadores mecânicos Roda e eixo A roda é considerada a maior invenção de sempre. É um dispositivo cilíndrico que gira em torno de um eixo, facilitando o deslocamentos
Fátima Pais Movimento e Mecanismos Operadores mecânicos Roda e eixo A roda é considerada a maior invenção de sempre. É um dispositivo cilíndrico que gira em torno de um eixo, facilitando o deslocamentos
Teoria de Sistemas Lineares
 Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Teoria de Sistemas Lineares Prof. Contato: Sala 2605 (BLOCO 1) mailto: palhares@cpdee.ufmg.br www.ppgee.ufmg.br/ palhares/teoriasistemaslineares.html Segundas-Feiras 07h30 a 09h10 09h25 a 11h05 Aspectos
Sistemas Mecatrônicos 1
 Sistemas Mecatrônicos 1 Módulo 5 Elementos mecânicos de sistemas mecatrônicos Prof. Leonardo Marquez Pedro Os elementos mecânicos são utilizados na construção da cadeia cinemática dos diferentes tipos
Sistemas Mecatrônicos 1 Módulo 5 Elementos mecânicos de sistemas mecatrônicos Prof. Leonardo Marquez Pedro Os elementos mecânicos são utilizados na construção da cadeia cinemática dos diferentes tipos
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
Programa Analítico de Disciplina MEC352 Elementos de Máquinas II
 0 Programa Analítico de Disciplina Departamento de Engenharia de Produção e Mecânica - Centro de Ciências Exatas e Tecnológicas Número de créditos: 5 Teóricas Práticas Total Duração em semanas: 15 Carga
0 Programa Analítico de Disciplina Departamento de Engenharia de Produção e Mecânica - Centro de Ciências Exatas e Tecnológicas Número de créditos: 5 Teóricas Práticas Total Duração em semanas: 15 Carga
FREIOS E EMBREAGENS. Prof. Dr. Julio Cézar de Almeida
 FREIOS E EMBREAGENS Prof. Dr. Julio Cézar de Almeida 1 FREIOS E EMBREAGENS 2 PARÂMETROS DE DESEMPENHO Força de acionamento Torque transmitido Perda de energia Aumento de temperatura 3 FREIOS E EMBREAGENS
FREIOS E EMBREAGENS Prof. Dr. Julio Cézar de Almeida 1 FREIOS E EMBREAGENS 2 PARÂMETROS DE DESEMPENHO Força de acionamento Torque transmitido Perda de energia Aumento de temperatura 3 FREIOS E EMBREAGENS
PONTOS PARA AS PROVAS ESCRITA E DIDÁTICA
 Página 1 de 15 DISCIPLINA: Ética e Legislação e Direito Público e Privado 1. Normas atinentes aos Sistemas Confea/Crea e Conselho Federal de Medicina Veterinária (CFMV). Registro Profissional; 2. Fiscalização
Página 1 de 15 DISCIPLINA: Ética e Legislação e Direito Público e Privado 1. Normas atinentes aos Sistemas Confea/Crea e Conselho Federal de Medicina Veterinária (CFMV). Registro Profissional; 2. Fiscalização
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
Cabine. Pontos fortes: Excelente visibilidade Cabine ampla e confortável Ergonômica Vários itens de série. Chassi:
 Cabine A cabine da RK 406 foi concebida dentro do conceito o máximo para o operador, seg padrões de segurança, conforto e grande visibilidade frontal e lateral, facilitando a ope Conforme o ambiente de
Cabine A cabine da RK 406 foi concebida dentro do conceito o máximo para o operador, seg padrões de segurança, conforto e grande visibilidade frontal e lateral, facilitando a ope Conforme o ambiente de
Talento múltiplo no respeita espaços estreitos. WL 18 Carregadeiras de rodas: capacidade do balde < 0,65 m³
 WL 18 Carregadeiras de rodas: capacidade do balde < 0,65 m³ Talento múltiplo no respeita espaços estreitos A carregadora WL 18 da Wacker Neuson pode ser aplicada em qualquer lugar - até na viela mais estreita.
WL 18 Carregadeiras de rodas: capacidade do balde < 0,65 m³ Talento múltiplo no respeita espaços estreitos A carregadora WL 18 da Wacker Neuson pode ser aplicada em qualquer lugar - até na viela mais estreita.
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
A carregadora para mais flexibilidade. WL 25 Carregadeiras de rodas: capacidade do balde < 0,65 m³
 WL 25 Carregadeiras de rodas: capacidade do balde < 0,65 m³ A carregadora para mais flexibilidade As instalações mais estreitos necessitam sobretudo de uma coisa: mais flexibilidade. É mesmo isso que a
WL 25 Carregadeiras de rodas: capacidade do balde < 0,65 m³ A carregadora para mais flexibilidade As instalações mais estreitos necessitam sobretudo de uma coisa: mais flexibilidade. É mesmo isso que a
Plano de curso Tecnologia em Escavadeira Hidráulica de Esteira
 PLANO DE CURSO MSOBRFDEHE08 PAG1 Plano de curso Tecnologia em Escavadeira Hidráulica de Esteira Justificativa do curso As escavadeiras hidráulicas de esteira são equipamentos muito avançados, sofisticados
PLANO DE CURSO MSOBRFDEHE08 PAG1 Plano de curso Tecnologia em Escavadeira Hidráulica de Esteira Justificativa do curso As escavadeiras hidráulicas de esteira são equipamentos muito avançados, sofisticados
Os alunos que concluam com sucesso esta unidade curricular deverão ser capazes de:
 MÁQUINAS ELÉTRICAS [10011] GERAL Regime: Semestre: OBJETIVOS Esta unidade curricular tem como objetivo dotar os alunos dos conhecimentos fundamentais no domínio de máquinas elétricas, partindo-se de uma
MÁQUINAS ELÉTRICAS [10011] GERAL Regime: Semestre: OBJETIVOS Esta unidade curricular tem como objetivo dotar os alunos dos conhecimentos fundamentais no domínio de máquinas elétricas, partindo-se de uma
Universidade Federal de Minas Gerais Colégio Técnico Plano de Ensino
 Disciplina: Carga horária total: Plano de Ensino Eletrotécnica Ano: 2015 160 horas/aula Curso: Eletrônica/ Automação Industrial Regime: Anual Série: 3 o Ano Observação: Carga Horária Semanal Total Teórica:
Disciplina: Carga horária total: Plano de Ensino Eletrotécnica Ano: 2015 160 horas/aula Curso: Eletrônica/ Automação Industrial Regime: Anual Série: 3 o Ano Observação: Carga Horária Semanal Total Teórica:
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A.
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Sistemas Hidráulicos. Composição e Componentes
 Sistemas Hidráulicos Composição e Componentes Composição e Componentes Composição e Componentes Esquema geral de sistema hidráulico Três partes principais: Esquema geral de sistema hidráulico Três partes
Sistemas Hidráulicos Composição e Componentes Composição e Componentes Composição e Componentes Esquema geral de sistema hidráulico Três partes principais: Esquema geral de sistema hidráulico Três partes
Especificação Técnica
 Technische Especifi cação Daten Técnica Kaltfräse Fresadora W a 200 frio W 100 Especificação Técnica Fresadora a frio W 100 Tambor fresador Largura de fresagem 1.000 mm Profundidade de fresagem * 1 300
Technische Especifi cação Daten Técnica Kaltfräse Fresadora W a 200 frio W 100 Especificação Técnica Fresadora a frio W 100 Tambor fresador Largura de fresagem 1.000 mm Profundidade de fresagem * 1 300
PROGRAMA DE ENSINO. CÓDIGO DISCIPLINA OU ESTÁGIO SERIAÇÃO IDEAL/PERÍODO MEC0949 Elementos de Máquinas I 4 a /7 o PRÉ-REQUISITO
 PROGRAMA DE ENSINO UNIDADE UNIVERSITÁRIA: UNESP CÂMPUS DE ILHA SOLTEIRA CURSO: Engenharia Mecânica (Resolução UNESP nº 74/2004 - Currículo: 4) HABILITAÇÃO: OPÇÃO: DEPARTAMENTO RESPONSÁVEL: Engenharia Mecânica
PROGRAMA DE ENSINO UNIDADE UNIVERSITÁRIA: UNESP CÂMPUS DE ILHA SOLTEIRA CURSO: Engenharia Mecânica (Resolução UNESP nº 74/2004 - Currículo: 4) HABILITAÇÃO: OPÇÃO: DEPARTAMENTO RESPONSÁVEL: Engenharia Mecânica
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo
 Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
Mini_Lista11: Rotação de Corpos Rígidos: Eixo Fixo Lembrete 11.1 Em equações rotacionais, deve usar ângulos expressos em radianos. Lembrete 11.2 Na resolução de problemas de rotação, deve especificar um
PLANO DE ENSINO-APRENDIZAGEM DE COMPONENTE CURRICULAR - SEMESTRAL
 U N I V E R S I D A D E F E D E R A L D A B A H I A PRÓ-REITORIA DE ENSINO DE GRADUAÇÃO Coordenação Acadêmica Núcleo de Currículos e Programas PLANO DE ENSINO-APRENDIZAGEM DE COMPONENTE CURRICULAR - SEMESTRAL
U N I V E R S I D A D E F E D E R A L D A B A H I A PRÓ-REITORIA DE ENSINO DE GRADUAÇÃO Coordenação Acadêmica Núcleo de Currículos e Programas PLANO DE ENSINO-APRENDIZAGEM DE COMPONENTE CURRICULAR - SEMESTRAL
Conversão de Energia I
 Departamento de Engenharia Elétrica Aula 3.4 Máquinas de Corrente Contínua Prof. Clodomiro Unsihuay Vila Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas: com Introdução
Departamento de Engenharia Elétrica Aula 3.4 Máquinas de Corrente Contínua Prof. Clodomiro Unsihuay Vila Bibliografia FITZGERALD, A. E., KINGSLEY Jr. C. E UMANS, S. D. Máquinas Elétricas: com Introdução
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DE PELOTAS PRÓ-REITORIA DE GRADUAÇÃO
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DE PELOTAS PRÓ-REITORIA DE GRADUAÇÃO PLANO DE ENSINO Ano Semestre letivo 2016 Primeiro 1. Identificação Código 1.1 Disciplina: FÍSICA BÁSICA I 0090113 1.2 Unidade:
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE FEDERAL DE PELOTAS PRÓ-REITORIA DE GRADUAÇÃO PLANO DE ENSINO Ano Semestre letivo 2016 Primeiro 1. Identificação Código 1.1 Disciplina: FÍSICA BÁSICA I 0090113 1.2 Unidade:
Vibrações e Dinâmica das Máquinas Aula - Cinemática. Professor: Gustavo Silva
 Vibrações e Dinâmica das Máquinas Aula - Cinemática Professor: Gustavo Silva 1 Cinemática do Movimento Plano de um Corpo Rígido 1 Movimento de um corpo rígido; 2 Translação; 3 Rotação em torno de um eixo
Vibrações e Dinâmica das Máquinas Aula - Cinemática Professor: Gustavo Silva 1 Cinemática do Movimento Plano de um Corpo Rígido 1 Movimento de um corpo rígido; 2 Translação; 3 Rotação em torno de um eixo
Plano de curso Tecnologia em Motoniveladora
 PLANO DE CURSO MSOBRFDMTN08 PAG1 Plano de curso Tecnologia em Motoniveladora Justificativa do curso Em uma obra de terraplanagem a motoniveladora é considerada um equipamento fundamental para trabalhos
PLANO DE CURSO MSOBRFDMTN08 PAG1 Plano de curso Tecnologia em Motoniveladora Justificativa do curso Em uma obra de terraplanagem a motoniveladora é considerada um equipamento fundamental para trabalhos