Sistemas de Coordenadas
|
|
|
- Tânia Wagner de Sousa
- 8 Há anos
- Visualizações:
Transcrição
1 INF 366 Computação Gráfica Interativa Tranformaçõe Alberto B. Rapoo Sitema de Coordenada Objeto em Computação Gráfica pouem decriçõe numérica (modelo) que caracteriam ua forma e dimenõe. Ee número e referem a um itema de coordenada, normalmente o itema Carteiano de coordenada:, e. Em algun cao, preciamo de mai de um itema de coordenada: Um itema local para decrever parte individuai de uma máquina, por eemplo, que pode er montada epecificando-e a relação de cada itema local da vária peça. John Dingliana, 24
2 Tranformaçõe Em algun cao, objeto eibem imetria, de modo que apena parte dele precia er decrita, poi o reto pode er contruído por refleão, rotação e/ou tranlação do pedaço original. Um projetita pode querer viualiar um objeto ob vário ponto de vita, rotacionando-o ou movendo uma câmera virtual. Em animação, um ou mai objeto podem preciar e mover em relação ao outro, de modo que eu itema de coordenada locai devam er tranladado e rotacionado ao longo da animação. John Dingliana, 24 Eemplo Parte do objeto definida em itema de coordenada locai: etc... Objeto montado por meio de tranformação da parte contituinte: John Dingliana, 24 2
3 Eemplo 2 5 etapa de uma animação de um cubo girando A cada quadro da animação, o objeto é tranformado (rotação, nee cao). O objeto também poderia er tranformado pela mudança de tamanho (ecalamento), ua forma (deformação), ou ua localiação (tranlação). Outro efeito de animação ão obtido em alterar o objeto em i, ma a forma como ele é viualiado (tranformação window to viewport) a cada quadro (por eemplo, um oom). John Dingliana, 24 Tranformaçõe Há 2 forma de e energar uma tranformação Uma Tranformação de Objeto altera a coordenada de cada ponto de acordo com alguma regra, mantendo o itema de coordenada inalterado. Uma Tranformação de Coordenada produ um itema de coordenada diferente, e então repreenta todo o ponto originai nee novo itema. Cada maneira tem ua vantagem, e ão intimamente relacionada. John Dingliana, 24 3
4 TRANSFORMAÇÃO DE OBJETO.4, 2, John Dingliana, 24 TRANSFORMAÇÃO DE COORDENADAS (,) (,) Clae de Tranformaçõe Euclidiana / Corpo Rígido de Similaridade Lineare Afin Projetiva 4




5 Tranformaçõe Euclidiana Preervam ditância Preervam ângulo Identidade Corpo Rígido / Euclidiana Tranlação Tranlação Identidade Rotação Rotação MIT EECS 6.837, Durand and Cutler Tranformaçõe de Similaridade Preervam ângulo Similaridade Euclidiana Ecalamento Iotrópico Tranlação Identidade Rotação Ecalamento Iotrópico MIT EECS 6.837, Durand and Cutler 5

 L(p) + L(q)")
6 Tranformaçõe Lineare Ecalamento Refleão Shear Euclidiana Similaridade Linear Tranlação Identidade Rotação Ecalaento Iotrópico Ecalamento Refleão Shear MIT EECS 6.837, Durand and Cutler Tranformaçõe Lineare L(p + q) L(p) + L(q) L(ap) a L(p) MIT EECS 6.837, Durand and Cutler 6

7 Tranformaçõe Afin Preervamlinha paralela Euclidiana Identidade Tranlação Rotação Afin Similaridade Ecalaento Iotrópico Linear Ecalamento Refleão Shear Tranformaçõe Projetiva preervamlinha Projetiva Afin Similaridade Euclidiana Identidade Tranlação Rotação Ecalaento Iotrópico Linear Ecalamento Refleão Shear Perpectiva 7


8 Perpectiva Perpectiva é um do fatore que dá aparência 3D à cena Coordenada de modelagem Tranformaçõe 2D Ecalamento Tranlação Ecalamento Rotação Tranlação Coordenada do mundo 8
9 Coordenada de modelagem Tranformaçõe 2D Localiação inicial em (, ) com eio e alinhado Coordenada de modelagem Tranformaçõe 2D Scale.3,.3 Rotate -9 Tranlate 5, 3 9
10 Coordenada de modelagem Tranformaçõe 2D Scale.3,.3 Rotate -9 Tranlate 5, 3 Coordenada de modelagem Tranformaçõe 2D Scale.3,.3 Rotate -9 Tranlate 5, 3
11 VRML: Nó Tranform Eemplo em VRML The Annotated VRML Reference

12 Eemplo em VRML Ecalamento Ecalar uma coordenada ignifica multiplicar cada um de eu componente por um valor ecalar Ecalamento iotrópico ignifica que ee valor ecalar é o memo para todo o componente 2 2
13 Ecalamento Ecalamento não-iotrópico: valore ecalare diferente por componente: X 2, Y.5 Como repreentar o ecalamento na forma de matrie? Ecalamento Operação de ecalamento: a b Na forma matricial: a b Matri de ecalamento 3
14 John Dingliana, 24 Rotação 2D Q X Q Rco( θ + φ ) Rin( θ + φ ) [] [2] P Y Q θ P φ R P X P X P R co ( φ ) R in ( φ ) [3] [4] co ( θ+ φ) co () θ co () φ in () θ in () φ in ( θ+ φ) in () θ co () φ + co () θ in () φ [] Q Rco ( θ) co ( φ) Rin ( θ) in ( φ) Subtituindo de [3] e [4] Q P co ( θ) P in ( θ) Similarmente, a partir de [2] Q P co ( θ) + P in ( θ) (, ) Rotação 2D (, ) θ co(θ) - in(θ) in(θ) + co(θ) 4
15 5 Rotação 2D Na forma matricial: Emborain(θ) e co(θ) ejam funçõe nãolineare de θ, é combinação linear de e é combinação linear de e ( ) ( ) ( ) ( ) θ θ θ θ co in in co Tranlação 2D t t t t t t t M. Gatta, PUC-Rio
16 Tranformaçõe 2D Báica Tranlação: + t + t Ecalamento: * * Rotação: *co -*in *in + *co Podem er combinada com álgebra imple Tranformaçõe 2D Báica Tranlação: + t + t Ecalamento: * * Rotação: *co -*in *in + *co 6
17 Tranformaçõe 2D Báica Tranlação: + t + t Ecalamento: (,) * (, ) * Rotação: *co -*in *in + *co * * Tranformaçõe 2D Báica Tranlação: + t + t Ecalamento: * * Rotação: *co -*in *in + *co (, ) (* ) *co - (* ) * in (* ) * in + (* ) * co 7
18 Tranformaçõe 2D Báica Tranlação: + t + t Ecalamento: * * Rotação: *co -*in (, ) *in + *co ((* )*co - (* )*in) + t ((* )*in + (* )*co) + t Repreentação Matricial Repreentar tranformação 2D por uma matri a b c d Multiplicar matri por vetor-coluna aplicar tranformação a um ponto a c b d a + b c + d 8
19 Repreentação Matricial Tranformaçõe ão combinada por multiplicação de matrie a c be d g f i h k j l Matrie ão uma forma conveniente e eficiente de repreentar uma eqüência de tranformaçõe Produto de Matrie C AB a a M a n 2 a a a 2 22 M n 2 L L O L a a a q 2 q M nq b b M b q 2 b b b 2 22 M q 2 L L O L b m b 2 m M b qm c ij q k a ik b kj neutro: I M L O M. Gatta, PUC-Rio 9
20 Matrie 22 Que tranformaçõe planare podem er repreentada com uma matri 22? Identidade 2D? Ecalemento 2D em torno de (,)? * * Matrie 22 Que tranformaçõe planare podem er repreentada com uma matri 22? Rotação 2D em torno de (,)? co* in * co in * + co* in in co 2
21 Matrie 22 Que tranformaçõe planare podem er repreentada com uma matri 22? Epelhamento 2D em torno de Y? Epelhamento 2D em torno de (,)? Matrie 22 Que tranformaçõe planare podem er repreentada com uma matri 22? Tranlação 2D? + t + t NÃO! 2
22 Coordenada Homogênea Como repreentar uma tranlação como matri 33? + t + t Coordenada Homogênea Coordenada homogênea repreentam coordenada em 2 dimenõe com vetor 3 coord. homogênea Coordenada Homogênea parecem pouco intuitiva, ma ela implificam muito a operaçõe gráfica 22
23 23 Coordenada Homogênea Como repreentar uma tranlação como matri 33? t t + + Rep: Uando a terceira coluna da matri t t Tranlação Tranlação Eemplo + + t t t t t 2 t Coordenada Homogênea
24 24 Coordenada Homogênea Coloca uma 3a coordenada para cada ponto 3D (,, w) repreenta um ponto em (/w, /w) (,, ) repreenta um ponto no infinito (,, ) não é permitido Sitema conveniente para repreentar muita tranformaçõe útei em CG 2 2 (2,,) or (4,2,2) or (6,3,3) Tranformaçõe 2D Báica Repreentação em matrie 33 co in in co t t h h Tranlação Rotação Cialhamento (Shear) Ecalamento
25 25 Cialhamento (Shear) h h + + * * γ + tan tan γ γ M. Gatta, PUC-Rio Concatenação de Tranformaçõe T R E R 2 T 2 P T 2 R 2 E R T P P T 2 R 2 E R T P M. Gatta, PUC-Rio
26 Compoição de Matrie Tranformaçõe podem er combina pela multiplicação de matrie w t co t in in co w p T(t,t ) R() S(, ) p Compoição de Matrie Atenção: ordem da tranformaçõe fa diferença Multiplicação de matrie não é comutativa p T * R * S * p Global Local 26
27 27 Ordem da Tranformaçõe p R p T p R p p T (a) (b) M. Gatta, PUC-Rio Ordem da Tranformaçõe E: rotacionar egmento em 45 grau em torno da etremidade a a a Reultado eperado
28 Ordem da Tranformaçõe Erro: aplicar a rotação de 45 o, R(45), afeta a dua etremidade Pode-e tentar faer a rotação e depoi retornar o ponto a à ua poição original, ma quanto ele preciaria er tranladado? a a Como traer o ponto a de volta à poição original??? Errado! R(45) a Correto T(-3) R(45) T(3) Ordem da Tranformaçõe Correto: iolar ponto a do efeito da rotação a. Tranladar a linha para colocar a na origem: T (-3) a 2. Rotacionar linha em 45 o : R(45) a 3. Tranladar a de volta: T(3) a 28
29 Compoição de Matrie T(3) R(45) T(-3) 3 co(45) in(45) in(45) co(45) 3 a a a a A multiplicação começa da última para a primeira tranformação Compoição de Matrie Depoi de ordenar a matrie corretamente: Multiplicá-la Guardar reultado em uma ó matri Uar ea matri para realiar a tranformação compota em cada um do ponto que definem o objeto tranformado (vértice, por eemplo) Todo o vértice podem er tranformado com uma imple multiplicação de vetor por matri. 29
30 Eercício 2D Conidere o triângulo com o eguinte vértice em coordenada homogênea Rotacione o triângulo de 9 o (entido antihorário) em relação ao ponto P (6,5) P C A B Etapa da Solução. Definir matri para tranladar o triângulo de modo que o centro de rotação e mova para a origem do itema de coordenada 2. Definir matri para rotacionar o triângulo 3. Definir matri para tranladar o triângulo de volta 4. Gerar matri combinada da tranformação 5. Tranformar o vértice do triângulo 3
31 Etapa da Solução. Definir matri para tranladar o triângulo de modo que o centro de rotação e mova para a origem do itema de coordenada Centro de rotação: P (6,5) Tranlação de -6 unidade em e -5 unidade em Etapa da Solução 2. Definir matri para rotacionar o triângulo O ângulo de rotação é medido no entido antihorário: R(+9 o ) co(9 o ) e in(9 o ) 3
32 Etapa da Solução 3. Definir matri para tranladar o triângulo de volta Tranlação de 6 unidade em e 5 unidade em Etapa da Solução 4. Gerar matri combinada da tranformação 32
33 33 Etapa da Solução 5. Tranformar o vértice do triângulo C B A P B A C Tranformaçõe em 3D Mema idéia que em 2D: Coordenada homogênea: (,,,w) Matrie de tranformação 44 w p o n m l k j i h g f e d c b a w
34 34 Tranformaçõe 3D Báica w w w t t t w w w Identidade Ecalamento Tranlação Tranformaçõe 3D Báica w w Epelhamento em torno do plano YZ w w Epelhamento em torno do plano XZ w w Epelhamento em torno do plano XY
35 35 Tranformaçõe 3D Báica w w co in in co Rotação em torno de Z: w w co in in co w w co in in co Rotação em torno de Y: Rotação em torno de X: Rotaçõe Revera Como defaer uma rotação R(θ)? Aplicar o invero da rotação: R(-θ) Contruindo R(-θ) : co(-θ) co(θ) in (-θ) - in (θ) Aim: R(-θ) R T (θ) co in in co co in in co T
36 Eercício 3D Encontre a repectiva matrie de tranformação para o eguinte cao a) Tranlação que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) b) Ecalamento que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) c) Rotação em torno do eio que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) Qual o ângulo dea rotação? Solução a) Tranlação que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) Matri de tranlação 36
37 Solução b) Ecalamento que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) Matri de ecalamento Solução c) Rotação em torno do eio que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) Para rotação em torno de : (2) (): 37
38 Solução c) Rotação em torno do eio que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) Subtituindo em () ou (2): Matri de rotação Solução c) Rotação em torno do eio que leva o ponto p (a, b, c ) para o ponto p 2 (a 2, b 2, c 2 ) Qual o ângulo dea rotação? 38
39 39 Ângulo de Euler Fundamento da Comp. Gráfica Jona Gome, Lui Velho Ângulo de Euler + + c c c c c c c c c c c c c c θ θ θ M. Gatta, PUC-Rio Notação: c co(θ ); in(θ ) e aim por diante


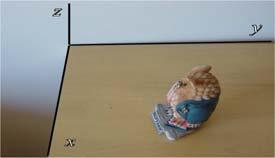

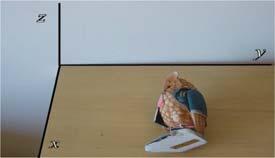
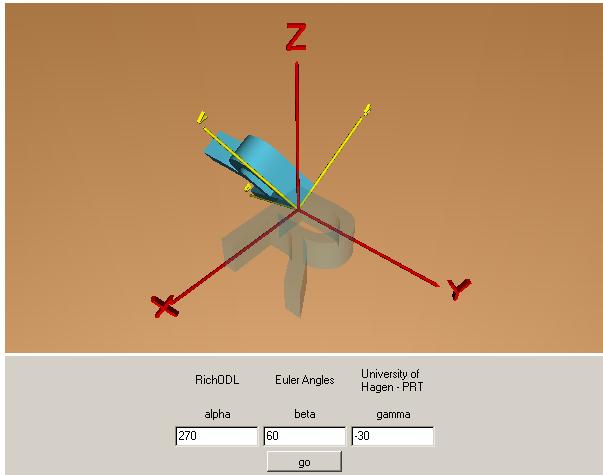
40 θ 9 o θ 9 o θ 9 o θ 9 o Demo: Ângulo de Euler 4
41 Bibliografia Adicional Peter Shirle, Fundamental of Computer Graphic, A K Peter, Ltd., Natick, MA, USA, 22. Fole, J. D., Van Dam, A., Feiner, S. K., e Huhe, J. F., Phlip, L. R., Introduction to Computer Graphic, Addion-Wele, 995. Fole, J. D., Van Dam, A., Feiner, S. K., e Huhe, J. F., Computer Graphic: Principle and Practice, (Stem Programming), 2nd edition in C, Addion- Wele, 995. The Annotated VRML 97 Reference: AnnotatedVrmlRef/Book.html 4
Computação Gráfica. Ponto, Linha, Vetor e Matriz
 Computação Gráfica Ponto, Linha, Vetor e Matriz Prof. Rodrigo Rocha [email protected] Onde Etamo... Introdução a Computação Gráfica; Repreentação de Imagen: vetorial e matricial; Dipoitivo de entrada
Computação Gráfica Ponto, Linha, Vetor e Matriz Prof. Rodrigo Rocha [email protected] Onde Etamo... Introdução a Computação Gráfica; Repreentação de Imagen: vetorial e matricial; Dipoitivo de entrada
PMR2560 Visão Computacional Formação de imagens. Prof. Eduardo L. L. Cabral
 PMR256 Vião Computacional Formação de imagen Prof. Eduardo L. L. Cabral Objetivo Vião computacional: Senore de vião; Imagen digitai; Noçõe de tranformação de coordenada; Formação da imagem; Lente. Senore
PMR256 Vião Computacional Formação de imagen Prof. Eduardo L. L. Cabral Objetivo Vião computacional: Senore de vião; Imagen digitai; Noçõe de tranformação de coordenada; Formação da imagem; Lente. Senore
Computação Gráfica e Áreas Correlatas
 INF 1366 Computação Gráfica Interativa Alberto B. Raposo [email protected] http://www.tecgraf.puc-rio.br/~abraposo/inf1366 Computação Gráfica e Áreas Correlatas processamento de imagens Imagem
INF 1366 Computação Gráfica Interativa Alberto B. Raposo [email protected] http://www.tecgraf.puc-rio.br/~abraposo/inf1366 Computação Gráfica e Áreas Correlatas processamento de imagens Imagem
Translação. Sistemas de Coordenadas. Translação. Transformações Geométricas 3D
 Translação Transformações Geométricas 3D Um ponto (objeto) é deslocado de uma posição para outra posição no mesmo espaço 3D Rosane Minghim Maria Cristina F. de Oliveira ICMC Universidade de São Paulo 26
Translação Transformações Geométricas 3D Um ponto (objeto) é deslocado de uma posição para outra posição no mesmo espaço 3D Rosane Minghim Maria Cristina F. de Oliveira ICMC Universidade de São Paulo 26
Transformações Geométricas 3D
 Transformações Geométricas 3D Introdução Transformações 3D são uma etensão dos métodos 2D, incluindo-se a coordenada Z. Especificação de vetores em 3D translação: vetor de translação 3D escalonamento:
Transformações Geométricas 3D Introdução Transformações 3D são uma etensão dos métodos 2D, incluindo-se a coordenada Z. Especificação de vetores em 3D translação: vetor de translação 3D escalonamento:
Transformações Geométricas
 Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
Transformações Geométricas
 Transformações Geométricas Computação Gráfica CG & ND @ 26 ISEL/DEETC/S Computação Gráfica 2 http://hof.povra.org/images/office-3.jpg Sumário Transformações geométricas Translação Rotação Escala Shearing
Transformações Geométricas Computação Gráfica CG & ND @ 26 ISEL/DEETC/S Computação Gráfica 2 http://hof.povra.org/images/office-3.jpg Sumário Transformações geométricas Translação Rotação Escala Shearing
Transformações Geométricas
 Computação Gráfica Interativa - M. Gattass & L. F. Martha 8// Transformações Geométricas por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando Martha para a disciplina CIV8
Computação Gráfica Interativa - M. Gattass & L. F. Martha 8// Transformações Geométricas por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando Martha para a disciplina CIV8
Transformações Geométricas
 Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Transformações Geométricas Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário Tópicos da aula de hoje: Por que transformações? Classificação das transformações Transformações
Laboratório de Programação com Games. Conteúdo: Professor: - Transformações no plano. Instituto de Computação - UFF
 Laboratório de Programação com Games Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Transformações no plano Transformações geométricas: Introdução Na Computação Gráfica é essencial poder
Laboratório de Programação com Games Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Transformações no plano Transformações geométricas: Introdução Na Computação Gráfica é essencial poder
Aula9 e 10. Projeções Planas. Como representar objetos 3D em dispositivos 2D? 2019/1 IC / UFF. Paginas 91 a 101 livro texto de computacao grafica
 Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
8 Equações de Estado
 J. A. M. Felippe de Souza 8 Equaçõe de Etado 8 Equaçõe de Etado 8. Repreentação por Variávei de Etado Exemplo 4 Exemplo 8. 4 Exemplo 8. 6 Exemplo 8. 6 Exemplo 8.4 8 Matriz na forma companheira Exemplo
J. A. M. Felippe de Souza 8 Equaçõe de Etado 8 Equaçõe de Etado 8. Repreentação por Variávei de Etado Exemplo 4 Exemplo 8. 4 Exemplo 8. 6 Exemplo 8. 6 Exemplo 8.4 8 Matriz na forma companheira Exemplo
FÍSICA 2º ANO DIFERENÇA DE DOIS VETORES Duas grandezas vetoriais são iguais quando apresentam o mesmo módulo, a mesma direção e o mesmo sentido.
 FÍSICA º ANO I- ETOES - GANDEZA ESCALA E ETOIAL a) G Ecalar: é aquela que fica perfeitamente definida quando conhecemo o eu valor numérico e a ua unidade de medida Ex: maa, tempo, comprimento, energia,
FÍSICA º ANO I- ETOES - GANDEZA ESCALA E ETOIAL a) G Ecalar: é aquela que fica perfeitamente definida quando conhecemo o eu valor numérico e a ua unidade de medida Ex: maa, tempo, comprimento, energia,
Transformações Geométricas em C.G.
 Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
Transformações Geométricas em C.G. Cap 2 (do livro texto) Aula 3, 4 e 5 UFF - 214 Geometria Euclideana : 3D Geometria Axiomas e Teoremas Coordenadas de pontos, equações dos objetos Geometria Euclideana
4. Curvas Paramétricas e Transformações 2D
 4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
2.3 Simetrias cinemáticas e geradores infinitesimais
 .3 Simetria cinemática e geradore infiniteimai O método de contruir uma repreentação de um itema diretamente a partir da freqüência relativa medida, como exemplificado no pin, eria completamente inviável
.3 Simetria cinemática e geradore infiniteimai O método de contruir uma repreentação de um itema diretamente a partir da freqüência relativa medida, como exemplificado no pin, eria completamente inviável
Transformações Geométricas Grafos de Cena
 Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Transformações Geométricas Grafos de Cena Edward Angel, Cap. 4 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na última aula... Transformações Geométricas Translação Escala Rotação Espaço Homogéneo
Projeções. Cap 2 (do livro texto) Aula 6 UFF
 Aula 6 UFF") Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Transformações Gráficas Tridimensionais (3D) Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro
 Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro") Transformações Gráficas Tridimensionais (3D) Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro Introdução A manipulação, visualiação e a construção de imagens gráficas tridimensionais
Transformações Gráficas Tridimensionais (3D) Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro Introdução A manipulação, visualiação e a construção de imagens gráficas tridimensionais
1 Transformada de Laplace de u c (t)
") Tranformada de Laplace - Função de Heaviide Prof ETGalante Equaçõe diferenciai ob ação de funçõe decontínua aparecem com frequência na análie do uxo de corrente em circuito elétrico ou na vibraçõe de itema
Tranformada de Laplace - Função de Heaviide Prof ETGalante Equaçõe diferenciai ob ação de funçõe decontínua aparecem com frequência na análie do uxo de corrente em circuito elétrico ou na vibraçõe de itema
TRANSFORMADA DE LAPLACE. Revisão de alguns: Conceitos Definições Propriedades Aplicações
 TRANSFORMADA DE LAPLACE Revião de algun: Conceito Deiniçõe Propriedade Aplicaçõe Introdução A Tranormada de Laplace é um método de tranormar equaçõe dierenciai em equaçõe algébrica mai acilmente olucionávei
TRANSFORMADA DE LAPLACE Revião de algun: Conceito Deiniçõe Propriedade Aplicaçõe Introdução A Tranormada de Laplace é um método de tranormar equaçõe dierenciai em equaçõe algébrica mai acilmente olucionávei
Miloje / Shutterstock. Matemática B. CP_18_GAIA_MB1.indd 1 12/01/ :44
 Miloje / Shuttertock Matemática _18_GI_M1.indd 1 1/01/018 14:44 Matemática aula 1 é ietriz de Ô Ô Ô Soma de ângulo adjacente Quanto ao valor, a oma de doi ângulo adjacente pode er claificada em trê categoria:
Miloje / Shuttertock Matemática _18_GI_M1.indd 1 1/01/018 14:44 Matemática aula 1 é ietriz de Ô Ô Ô Soma de ângulo adjacente Quanto ao valor, a oma de doi ângulo adjacente pode er claificada em trê categoria:
Transformações (Cap 4.3, 4.4 e 4.6 a 4.10)
") 4.6 a 4.) Transformações (Cap 4.3, 4.4 e 4.6 a 4.) Instituto Superior Técnico, 26/27 Sumário Revisões Transformações Elementares Coordenadas Homogéneas Composição de Transformações Transformações em OpenGL
4.6 a 4.) Transformações (Cap 4.3, 4.4 e 4.6 a 4.) Instituto Superior Técnico, 26/27 Sumário Revisões Transformações Elementares Coordenadas Homogéneas Composição de Transformações Transformações em OpenGL
XXVII Olimpíada Brasileira de Matemática GABARITO Segunda Fase
 XXVII Olimpíada Braileira de Matemática GABARITO Segunda Fae Soluçõe Nível Segunda Fae Parte A CRITÉRIO DE CORREÇÃO: PARTE A Cada quetão vale 4 ponto e, e omente e, para cada uma o reultado ecrito pelo
XXVII Olimpíada Braileira de Matemática GABARITO Segunda Fae Soluçõe Nível Segunda Fae Parte A CRITÉRIO DE CORREÇÃO: PARTE A Cada quetão vale 4 ponto e, e omente e, para cada uma o reultado ecrito pelo
Transformada de Laplace
 Sinai e Sitema - Tranformada de Laplace A Tranformada de Laplace é uma importante ferramenta para a reolução de equaçõe diferenciai. Também é muito útil na repreentação e análie de itema. É uma tranformação
Sinai e Sitema - Tranformada de Laplace A Tranformada de Laplace é uma importante ferramenta para a reolução de equaçõe diferenciai. Também é muito útil na repreentação e análie de itema. É uma tranformação
Matemática. Resolução das atividades complementares ( ) M19 Geometria Analítica: Pontos e Retas. ( ) pertence à bissetriz dos quadrantes pares.
 M19 Geometria Analítica: Pontos e Retas. ( ) pertence à bissetriz dos quadrantes pares.") Reolução da atividade complementare Matemática M9 Geometria nalítica: Ponto e Reta p. 08 (MK-SP) Identifique a entença fala: a) O ponto (0, ) pertence ao eio. b) O ponto (4, 0) pertence ao eio. c) O ponto
Reolução da atividade complementare Matemática M9 Geometria nalítica: Ponto e Reta p. 08 (MK-SP) Identifique a entença fala: a) O ponto (0, ) pertence ao eio. b) O ponto (4, 0) pertence ao eio. c) O ponto
Cena em Computação Gráfica
 INF 366 Computação Gráfica Iterativa Câmeras e Trasformações Projetivas Alberto B. Raposo e Marcelo Gattass [email protected] http://www.tecgraf.puc-rio.br/~abraposo/inf366 Cea em Computação
INF 366 Computação Gráfica Iterativa Câmeras e Trasformações Projetivas Alberto B. Raposo e Marcelo Gattass [email protected] http://www.tecgraf.puc-rio.br/~abraposo/inf366 Cea em Computação
Computação Gráfica II
 Computação Gráfica II Representação de Objetos Prof. Rodrigo Rocha [email protected] http://www.bolinhabolinha.com Pipeline de visualização 3D 1 Representação dos objetos Aramada (Wire frame)
Computação Gráfica II Representação de Objetos Prof. Rodrigo Rocha [email protected] http://www.bolinhabolinha.com Pipeline de visualização 3D 1 Representação dos objetos Aramada (Wire frame)
Capítulo 2 Vetores. 1 Grandezas Escalares e Vetoriais
 Capítulo 2 Vetores 1 Grandezas Escalares e Vetoriais Eistem dois tipos de grandezas: as escalares e as vetoriais. As grandezas escalares são aquelas que ficam definidas por apenas um número real, acompanhado
Capítulo 2 Vetores 1 Grandezas Escalares e Vetoriais Eistem dois tipos de grandezas: as escalares e as vetoriais. As grandezas escalares são aquelas que ficam definidas por apenas um número real, acompanhado
Física Atómica e Nuclear Capítulo 7. Átomos Multilelectrónicos.
 132 7.6. Acoplamento do Momento Angular. A informação dada atravé da ditribuição electrónica no átomo não é uficiente para decrever completamente o etado do átomo, uma vez que não explica como o momento
132 7.6. Acoplamento do Momento Angular. A informação dada atravé da ditribuição electrónica no átomo não é uficiente para decrever completamente o etado do átomo, uma vez que não explica como o momento
Universidade Cruzeiro do Sul. Campus Virtual Unidade I: Unidade: Medidas de Dispersão
 Univeridade Cruzeiro do Sul Campu Virtual Unidade I: Unidade: Medida de Diperão 010 0 A medida de variação ou diperão avaliam a diperão ou a variabilidade da equência numérica em análie. São medida que
Univeridade Cruzeiro do Sul Campu Virtual Unidade I: Unidade: Medida de Diperão 010 0 A medida de variação ou diperão avaliam a diperão ou a variabilidade da equência numérica em análie. São medida que
Disciplina de Física Aplicada A 2012/2 Curso de Tecnólogo em Gestão Ambiental Professora Ms. Valéria Espíndola Lessa MECÂNICA
 Diciplina de Fíica Aplicada A 212/2 Curo de Tecnólogo em Getão Ambiental Profeora M. Valéria Epíndola Lea MECÂNICA Neta aula etudaremo a primeira parte da Fíica Cláica: a Mecânica. A Mecânica divide-e
Diciplina de Fíica Aplicada A 212/2 Curo de Tecnólogo em Getão Ambiental Profeora M. Valéria Epíndola Lea MECÂNICA Neta aula etudaremo a primeira parte da Fíica Cláica: a Mecânica. A Mecânica divide-e
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Revisão de Alguns Conceitos Básicos da Física Experimental
 Revião de Algun Conceito Báico da Fíica Experimental Marcelo Gameiro Munhoz [email protected] Lab. Pelletron, ala 245, r. 6940 O que é uma medida? Medir ignifica quantificar uma grandeza com relação a algum
Revião de Algun Conceito Báico da Fíica Experimental Marcelo Gameiro Munhoz [email protected] Lab. Pelletron, ala 245, r. 6940 O que é uma medida? Medir ignifica quantificar uma grandeza com relação a algum
Cálculo Diferencial e Integral II. Lista 8 - Exercícios/ Resumo da Teoria
 Cálculo Diferencial e Integral II Lita 8 - Exercício/ Reumo da Teoria Derivada Direcionai Definição Derivada Direcional. A derivada da função f x, no ponto P x, na direção do veror u u 1, u é o número
Cálculo Diferencial e Integral II Lita 8 - Exercício/ Reumo da Teoria Derivada Direcionai Definição Derivada Direcional. A derivada da função f x, no ponto P x, na direção do veror u u 1, u é o número
Transformações Geométricas
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Transformações Geométricas Edward Angel, Cap. 4 Questão 1, exame de 29/06/11 [1.0v] Considere o triângulo T={V 1, V 2, V 3 },
Coordenadas Homogêneas
 Coordenadas Homogêneas André Tavares da Silva [email protected] Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Coordenadas Homogêneas André Tavares da Silva [email protected] Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Coordenadas Homogêneas Promovem uniformidade no tratamento de qualquer transformação
Computação Gráfica Introdução
 Computação Gráfica Introdução UniverCidade - Prof. Ismael H F Santos April 05 Prof. Ismael H. F. Santos - [email protected] 1 Considerações Gerais Objetivo: Discutir os principais conceitos eos
Computação Gráfica Introdução UniverCidade - Prof. Ismael H F Santos April 05 Prof. Ismael H. F. Santos - [email protected] 1 Considerações Gerais Objetivo: Discutir os principais conceitos eos
Coordenadas Homogêneas no Plano e no Espaço
 http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
http://computacaografica.ic.uff.br/conteudocap2.html Curso de CG 2019/1 IC / UFF Coordenadas Homogêneas no Plano e no Espaço (AB) T = B T A T Esse material estáno Livro do curso no cap 2. Resumindo transformações
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 6. Projeções
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Introdução à Computação Gráfica. Claudio Esperança Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Ênfase na parte prática Avaliação através de trabalhos de implementação C / C++ OpenGL c/ GLUT Grau (nota) baseado
Introdução à Computação Gráfica Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Ênfase na parte prática Avaliação através de trabalhos de implementação C / C++ OpenGL c/ GLUT Grau (nota) baseado
Rotações em 3D. Descrição dos problemas. Como mover entre 2 frames. Ângulos de Euler. Foley Notas do Dave (lecture 29)
") Descrição dos problemas Rotações em 3D Foley 21.1.3 Notas do Dave (lecture 29) 1- Como parametrizar rotações 3D? em animações, para criar um movimento suave. translações e rotacões 2D são simples, mas
Descrição dos problemas Rotações em 3D Foley 21.1.3 Notas do Dave (lecture 29) 1- Como parametrizar rotações 3D? em animações, para criar um movimento suave. translações e rotacões 2D são simples, mas
2 Cargas Móveis, Linhas de Influência e Envoltórias de Esforços
 2 Carga óvei, Linha de Influência e Envoltória de Eforço 21 Introdução Para o dimenionamento de qualquer etrutura é neceário conhecer o eforço máximo e mínimo que ela apreentará ao er ubmetida ao carregamento
2 Carga óvei, Linha de Influência e Envoltória de Eforço 21 Introdução Para o dimenionamento de qualquer etrutura é neceário conhecer o eforço máximo e mínimo que ela apreentará ao er ubmetida ao carregamento
2. FLEXO-TORÇÃO EM PERFIS DE SEÇÃO ABERTA E PAREDES DELGADAS.
 2. FLEXO-TORÇÃO EM PERFIS DE SEÇÃO BERT E PREDES DELGDS. Nete capítulo ão apreentado, de forma concia, com bae no trabalho de Mori e Munaiar Neto (2009), algun conceito báico neceário ao entendimento do
2. FLEXO-TORÇÃO EM PERFIS DE SEÇÃO BERT E PREDES DELGDS. Nete capítulo ão apreentado, de forma concia, com bae no trabalho de Mori e Munaiar Neto (2009), algun conceito báico neceário ao entendimento do
Circuitos Elétricos II
 Univeridade Federal do ABC Eng. de Intrumentação, Automação e Robótica Circuito Elétrico II Joé Azcue, Prof. Dr. Tranformada invera de Laplace Definição Funçõe racionai Expanão em fraçõe parciai Teorema
Univeridade Federal do ABC Eng. de Intrumentação, Automação e Robótica Circuito Elétrico II Joé Azcue, Prof. Dr. Tranformada invera de Laplace Definição Funçõe racionai Expanão em fraçõe parciai Teorema
Módulo III Movimento Uniforme (MU)
") Módulo III Moimento Uniforme (MU) Em moimento retilíneo ou curilíneo em que a elocidade ecalar é mantida contante, diz-e que o móel etá em moimento uniforme. Nete cao, a elocidade ecalar intantânea erá
Módulo III Moimento Uniforme (MU) Em moimento retilíneo ou curilíneo em que a elocidade ecalar é mantida contante, diz-e que o móel etá em moimento uniforme. Nete cao, a elocidade ecalar intantânea erá
Projeto do compensador PID no lugar das raízes
 Projeto do compenador PID no lugar da raíze 0 Introdução DAELN - UTFPR - Controle I Paulo Roberto Brero de Campo Neta apotila erão etudado o projeto do compenadore PI, PD e PID atravé do lugar da raíze
Projeto do compenador PID no lugar da raíze 0 Introdução DAELN - UTFPR - Controle I Paulo Roberto Brero de Campo Neta apotila erão etudado o projeto do compenadore PI, PD e PID atravé do lugar da raíze
Introdução à Computação Gráfica
 Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Introdução à Computação Gráfica Desenho de Construção Naval Manuel Ventura Instituto Superior Técnico Secção Autónoma de Engenharia Naval 27 Sumário Entidades Geométricas Transformações Geométricas 2D
Condução de calor numa barra semi-infinita
 Univeridade de São Paulo Ecola de Engenharia de Lorena Departamento de Engenharia de Materiai Condução de calor numa barra emi-infinita Prof. Luiz T. F. Eleno Ecola de Engenharia de Lorena da Univeridade
Univeridade de São Paulo Ecola de Engenharia de Lorena Departamento de Engenharia de Materiai Condução de calor numa barra emi-infinita Prof. Luiz T. F. Eleno Ecola de Engenharia de Lorena da Univeridade
Lista 4 Prof. Diego Marcon
 Lita 4 Prof. Diego Marcon Método Aplicado de Matemática I 6 de Junho de 07 Lita de exercício referente ao retante da primeira área da noa diciplina: Exponencial de matrize Tranformada de Laplace Delocamento
Lita 4 Prof. Diego Marcon Método Aplicado de Matemática I 6 de Junho de 07 Lita de exercício referente ao retante da primeira área da noa diciplina: Exponencial de matrize Tranformada de Laplace Delocamento
Lista de Exercícios de Cálculo 3 Primeira Semana
 Lista de Exercícios de Cálculo 3 Primeira Semana Parte A 1. Se v é um vetor no plano que está no primeiro quadrante, faz um ângulo de π/3 com o eixo x positivo e tem módulo v = 4, determine suas componentes.
Lista de Exercícios de Cálculo 3 Primeira Semana Parte A 1. Se v é um vetor no plano que está no primeiro quadrante, faz um ângulo de π/3 com o eixo x positivo e tem módulo v = 4, determine suas componentes.
Projeções e Transformações em 3D
 Projeções e Transformações em 3D Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário O que são projeções Conversão 3D-2D Tipos de Projeção Projeções Paralelas Projeções Isométricas
Projeções e Transformações em 3D Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário O que são projeções Conversão 3D-2D Tipos de Projeção Projeções Paralelas Projeções Isométricas
Transformada de Laplace
 Tranformada de Laplace Câmpu Francico Beltrão Diciplina: Prof. Dr. Jona Joacir Radtke Tranformada de Laplace Se f (t) for uma função definida para todo t 0, ua tranformada de Laplace é a integral de f
Tranformada de Laplace Câmpu Francico Beltrão Diciplina: Prof. Dr. Jona Joacir Radtke Tranformada de Laplace Se f (t) for uma função definida para todo t 0, ua tranformada de Laplace é a integral de f
Computação Gráfica II
 Computação Gráfica II Iluminação e Textura Prof. Rodrigo Rocha [email protected] http://www.bolinhabolinha.com Introdução Determinação da cor envolve Além das propriedades da superfícies Cor,
Computação Gráfica II Iluminação e Textura Prof. Rodrigo Rocha [email protected] http://www.bolinhabolinha.com Introdução Determinação da cor envolve Além das propriedades da superfícies Cor,
Nota de aula: Transformações Lineares
 Nota de aula: Transformações Lineares Prof. Rebello out/99 rev. mai/0 São aplicações entre espaços vetoriais, isto é, funções onde tanto o domínio como o contra domínio são espaços vetoriais, portanto
Nota de aula: Transformações Lineares Prof. Rebello out/99 rev. mai/0 São aplicações entre espaços vetoriais, isto é, funções onde tanto o domínio como o contra domínio são espaços vetoriais, portanto
Questão Resposta 1 e 2 c 3 a 4 a 5 d 6 d 7 d 8 b 9 a 10 c 11 e 12 c 13 c 14 d 15 d 16 b
 Questão Resposta 1 e 2 c 3 a 4 a 5 d 6 d 7 d 8 b 9 a 10 c 11 e 12 c 13 c 14 d 15 d 16 b MAT2457 - Álgebra Linear para Engenharia I Prova 1-10/04/2013 Nome: NUSP: Professor: Turma: INSTRUÇÕES (1) A prova
Questão Resposta 1 e 2 c 3 a 4 a 5 d 6 d 7 d 8 b 9 a 10 c 11 e 12 c 13 c 14 d 15 d 16 b MAT2457 - Álgebra Linear para Engenharia I Prova 1-10/04/2013 Nome: NUSP: Professor: Turma: INSTRUÇÕES (1) A prova
e-física IFUSP 08 Movimento dos Projéteis Exercícios Resolvidos
 e-fíica Enino de Fíica Online Inituto de Fíica da USP 8 Moimento do Projétei Eercício Reolido Eercício Reolido 8.1 A figura ilutra a ituação na ual em um determinado intante um projétil de maa m = kg ai
e-fíica Enino de Fíica Online Inituto de Fíica da USP 8 Moimento do Projétei Eercício Reolido Eercício Reolido 8.1 A figura ilutra a ituação na ual em um determinado intante um projétil de maa m = kg ai
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 03 - visualizando a planar Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos visualizando a planar discussão dos primeiros 2
Processamento de Imagens CPS755 aula 03 - visualizando a planar Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos visualizando a planar discussão dos primeiros 2
TRANSFORMAÇÕES LINEARES
 1 TRANSFORMAÇÕES LINEARES Cristianeguedes.pro.br/cefet Transformação Linear 2 Definição: Sejam U e V dois espaços vetoriais reais. Uma função T (ou aplicação) é denominada Transformação Linear de U em
1 TRANSFORMAÇÕES LINEARES Cristianeguedes.pro.br/cefet Transformação Linear 2 Definição: Sejam U e V dois espaços vetoriais reais. Uma função T (ou aplicação) é denominada Transformação Linear de U em
- Aula 6 - Visualização 3D: Projeções
 - Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
- Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
Computação Gráfica. Prof. MSc. André Yoshimi Kusumoto
 Prof. MSc. André Yoshimi Kusumoto [email protected] Prof. MSc. André Yoshimi Kusumoto Email: [email protected] Site: http://www.kusumoto.com.br CARGA HORÁRIA SEMANAL: 02 horas-aula
Prof. MSc. André Yoshimi Kusumoto [email protected] Prof. MSc. André Yoshimi Kusumoto Email: [email protected] Site: http://www.kusumoto.com.br CARGA HORÁRIA SEMANAL: 02 horas-aula
SISTEMAS LINEARES. Obs 1. Quando o termo independente é nulo, como no exemplo, dizemos que é uma equação linear homogênea:
 Disciplina: Álgebra Linear e Geometria Analítica Curso: Engenharia Mecânica Professora: Valéria Lessa APOSTILA SISTEMAS LINEARES Muitos problemas em várias áreas da Ciência recaem na solução de sistemas
Disciplina: Álgebra Linear e Geometria Analítica Curso: Engenharia Mecânica Professora: Valéria Lessa APOSTILA SISTEMAS LINEARES Muitos problemas em várias áreas da Ciência recaem na solução de sistemas