UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ. DCEEng - Departamento de Ciências Exatas e Engenharias
|
|
|
- Daniela Madeira di Castro
- 6 Há anos
- Visualizações:
Transcrição
1 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Câmpus Panambi ANDREI FIEGENBAUM ADAPTAÇÃO E IMPLEMENTAÇÃO DE CONTROLE EM UM ROBÔ GRANTRY DE ACIONAMENTO PNEUMÁTICO Panambi 2016
2 ANDREI FIEGENBAUM ADAPTAÇÃO E IMPLEMENTAÇÃO DE CONTROLE EM UM ROBÔ GRANTRY DE ACIONAMENTO PNEUMÁTICO Trabalho de Conclusão de Curso de Engenharia Mecânica apresentado como requisito parcial para obtenção do grau de Engenheiro Mecânico. Orientador: Cristiano Rafael Lopes Co-orientador: Antonio Carlos Valdiero Panambi 2016
3 ANDREI FIEGENBAUM ADAPTAÇÃO E IMPLEMENTAÇÃO DE CONTROLE EM UM ROBÔ DO TIPO GANTRY DE ACIONAMENTO PNEUMÁTICO Este Trabalho de Conclusão de Curso foi julgado adequado para a obtenção do título de BACHAREL EM ENGENHARIA MECÂNICA e aprovado em sua forma final pelos professores orientador e co-orientador e pelos membros da banca examinadora. Panambi, maio de 2016 Prof. Cristiano Rafael Lopes Mestre pela Universidade de Passo Fundo - UPF Orientador Prof. Antonio Carlos Valdiero Doutor pela Universidade Federal de Santa Catarina - UFSC Co-orientador BANCA EXAMINADORA Prof. Claudiomiro Schneider Engenheiro Mecânico pela Universidade Regional do Noroeste do Estado do Rio Grande do Sul UNIJUÍ - Avaliador
4 Dedico este trabalho à minha família, pelo apoio e carinho em todos os momentos.
5 BIOGRAFIA DO AUTOR Andrei Fiegenbaum nascido em 1994 no município de Xanxerê no estado de Santa Catarina. Completou sua formação no ensino médio em 2011 no Colégio Evangélico Panambi e está cursando o último ano do curso de Engenharia Mecânica na Universidade Regional do Noroeste do Estado do Rio Grande do Sul - UNIJUÍ. Trabalha desde 2014 como Bolsista CNPq no Laboratório de Projeto da universidade sob a orientação do Prof. Dr. Antonio Carlos Valdiero.
6 AGRADECIMENTOS A minha família, pelo apoio e incentivo em todos os momentos. Aos professores Cristiano Rafael Lopes e Antonio Carlos Valdiero pelo tempo dedicado à orientação e apoio na elaboração deste trabalho. Aos meus colegas de laboratório que de alguma forma auxiliaram. À Universidade Regional do Noroeste do Rio Grande do Sul, pelos conhecimentos, ferramentas e disponibilização dos laboratórios e materiais necessários para a elaboração deste trabalho.
7 "O insucesso é apenas uma oportunidade para recomeçar de novo com mais inteligência." Henry Ford
8 RESUMO Apresenta-se neste trabalho a adaptação e implementação de controle em um robô do tipo Gantry de acionamento pneumático. Tem-se com objetivo principal o aumento da sua precisão além da sua adequação para a realização de tarefas do tipo pick-and-place. Este tipo de tarefa consiste basicamente em pegar uma peça e levá-la até um lugar determinado. Sendo assim, é uma tarefa que demanda precisão do posicionamento final do efetuador para que se tenha um bom resultado. No entanto, o controle de robôs com sistema de acionamento pneumático é mais complicado devido às não-linearidades como a compressibilidade do ar, o atrito das vedações dos atuadores e a zona morta das válvulas. Para o desenvolvimento deste trabalho foram utilizados componentes e equipamentos disponíveis no Núcleo de Inovação em Máquinas Automáticas e Servo Sistemas (NIMASS) da UNIJUÍ campus Panambi contando também com o auxílio de uma empresa local, a qual disponibilizou material metálico, mão de obra e tempo na fabricação de peças. A revisão bibliográfica foi baseada em literatura clássica, recente e nos trabalhos antecedentes realizados na UNIJUÍ. O controle do robô foi feito através de um computador, utilizando o MatLab/Simulink, integrado a uma placa de aquisição de dados dspace, que recebe os sinais dos sensores, alimenta o controle e envia sinais de comando para as servoválvulas que acionam os atuadores. Dessa forma, pode-se realizar os testes e analisar os resultados obtidos através das variáveis salvas. Palavras-chave: robô Gantry, pick-and-place, acionamento pneumático.
9 ABSTRACT It is presented in this paper the adaptation and implementation of control on a pneumatically driven gantry robot. The main objective is the increase in accuracy in addition to its suitability for the performance of the pick-and-place type tasks. This type of task consists in picking up a part placing it at a specified destination. Therefore, it is a task that demands precision positioning end-effector in order to have a good result. However, the robot control with pneumatic drive system is more complicated due to nonlinearities as the compressibility of the air, the friction of the seals of the actuators and the valves dead zone. For the development of this work were used components and equipment available at the Innovation Center in Automatic Machinery and Servo Systems (NIMASS) of UNIJUÍ campus Panambi and also counted with the help of an local company, which released metallic material, labor and time to the fabication of parts. The literature review was based on classic literature, recent history and the work carried out in UNIJUÍ. Controlling the robot it was done through a computer using Matlab / Simulink, integrated with a data acquisition board dspace, which receives signals from the sensors, feeds the control and sends control signals to the servo valves that drive the actuators. Thus, one can conduct tests and analyze the results obtained using the saved variables. Palavras-chave: Gantry robot, pick-and-place, pneumatically driven.
10 LISTA DE FIGURAS Figura 1 - Representação das juntas deslizante a), rotativa b) e tipo bola-e-encaixe c) Figura 2: Representação e volume de trabalho de um robô articulado Figura 3: Representação e volume de trabalho de um robô cartesiano Figura 4 - Representação de um robô Gantry Figura 5: Representação e volume de trabalho de um robô cilíndrico Figura 6: Representação e volume de trabalho de um robô Scara Figura 7: Representação de um robô Paralelo Figura 8 - Motor elétrico Figura 9 - Cilindro hidráulico Figura 10 - Atuador pneumático Figura 11 - Foto do manipulador Figura 12 - Foto do robô com melhorias e adaptação para o processo de rebarbamento Figura 13 - Descrição do mecanismo do robô Figura 14 - Componentes do sistema de acionamento do robô Figura 15 - Foto da servoválvula Figura 16 - Unidade de conservação de ar comprimido Figura 17 - Reservatório de ar comprimido Figura 18 - Sistema de acionamento pneumático básico Figura 19 - Estação de trabalho Figura 20 - Placa de controle (dspace) Figura 21 - Fonte de alimentação Figura 22 - Desenho esquemático da interação entre a estação de trabalho e o robô.37 Figura 23 - Criação de layout no ControlDesk Figura 24 - Cilindro pneumático sem haste Figura 25 - Projeto conceitual das peças Figura 26 - Simulação estática da peça (1) Figura 27 - Simulação estática com carregamento vertical da peça (3) Figura 28 - Simulação estática com carregamento na horizontal da peça (3) Figura 29 - Peças para adaptação do atuador Figura 30 - Fotos dos componentes montados
11 11 Figura 31 - Ventosa do tipo fole Figura 32 - Geradora de vácuo Figura 33 - Efetuador final proposto Figura 34 - Efetuador final montado no robô Figura 35 - Foto da válvula on/off Figura 36 - Sistema pneumático completo Figura 37 - Disposição inicial das servoválvulas Figura 38 - Montagem das válvulas Figura 39 - Representação dos sistemas de coordenadas do robô Figura 40 - Estratégia de controle independente de junta com controlador (PI) Figura 41 - Relação entre espaço do atuador e espaço de junta Figura 42 - Determinação dos valores de d mínimos e máximos Figura 43 - Estratégia de controle proposta Figura 44 - Resultados para os ganhos Kp=10 e Ki=1, Figura 45 - Resultados para os ganhos Kp=30 e Ki=1, Figura 46 - Resultados para os ganhos Kp=40 e Ki=1, Figura 47 - Resultados para os ganhos: Kp=45 e Ki=1, Figura 48 - Resultados para os ganhos: Kp=50 e Ki= Figura 49 - Resultados para os ganhos: Kp=60 e Ki= Figura 50 - Representação do volume de trabalho do robô Figura 51 - Esboço da trajetória planejada no espaço de tarefa do robô Figura 52 - Realização dos testes Figura 53 - Layout criado para a captura dos dados Figura 54 - Trajetória no eixo Z Figura 55 - Erro de posição no eixo Z Figura 56 - Trajetória no eixo Y Figura 57 - Erro de posição do eixo Y Figura 58 - Trajetória no eixo X Figura 59 - Erro de posição no eixo X Figura 60 - Erro no espaço de tarefa Figura 61 - Trajetória desejada e trajetória realizada durante o teste
12 LISTA DE TABELAS Tabela 1 - Descrição dos componentes do sistema antigo Tabela 2 - Parâmetros de Denavit-Hartenberg Tabela 3 - Resumo dos resultados Tabela 4 - Programação da trajetória Tabela 5 - Parâmetros do controlador Tabela 6 - Erros de posicionamento no espaço
13 SUMÁRIO 1 INTRODUÇÃO Generalidades Objetivos REVISÃO BIBLIOGRÁFICA Robótica Industrial História Classificação dos robôs industriais Atuadores Cinemática Convenção de Denavit-Hartenberg Controle ROBÔ GANTRY DE ACIONAMENTO PNEUMÁTICO Introdução Antecedentes Mecanismo Acionamento Sistema de controle DESENVOLVIMENTO DAS MELHORIAS Introdução Troca do cilindro sem haste Análise das Necessidades Projeto Conceitual Projeto Preliminar Projeto Detalhado Efetuador final Posição das válvulas Sistema de controle Modelagem cinemática Inclusão do modelo cinemático no controle PLANEJAMENTO DE TRAJETÓRIAS E TESTES Determinação dos ganhos para o atuador sem haste... 56
14 Geração de trajetória Testes e resultados Análise dos resultados CONCLUSÃO REFERÊNCIAS BIBLIOGRÁFICAS APÊNDICE A DETALHAMENTO DA PEÇA (1) APÊNDICE B DETALHAMENTO DA PEÇA (2) APÊNDICE C DETALHAMENTO DA PEÇA (3) APÊNDICE D DETALHAMENTO DA ESTRUTURA DO EFETUADOR APÊNDICE E VISTA EXPLODIDA DO EFETUADOR FINAL ANEXO A MÁXIMAS CARGAS E MOMENTOS PERMITIDOS ANEXO B FICHA TÉCNICA DA VENTOSA ANEXO C FICHA TÉCNICA DA GERADORA DE VÁCUO ANEXO D FICHA TÉCNICA DA VÁLVULA SOLENOIDE... 92
15 15 1 INTRODUÇÃO 1.1 Generalidades O ser humano, desde o início de sua existência vem criando ferramentas e soluções para resolver os problemas do seu cotidiano. Nesse contexto, devido ao avanço tecnológico e ao crescimento da competitividade no setor industrial, o robô foi mais uma ferramenta criada para auxiliar na realização de determinadas tarefas. Dentre as vantagens da utilização dos robôs na indústria, pode-se destacar o aumento na produtividade, a melhora da qualidade do produto final, a contabilidade no processo, a facilidade na programação e no uso dos robôs, a operação em ambientes difíceis e perigosos ou em tarefas desagradáveis e repetitivas para o ser humano e finalmente a capacidade de trabalho por longos períodos sem interrupção (ROSÁRIO, 2005). Devido as suas características de flexibilidade e adaptação, o robô industrial se tornou um elemento importante nos processos produtivos que por sua vez se encontram cada vez mais automatizados e dinâmicos (ROMANO, 2002). Quanto aos atuadores do robô, estes podem ser hidráulicos, pneumáticos ou eletromagnéticos (VALDIERO, 2005). Segundo Carlotto (2006), o tipo de acionamento mais encontrado em robôs industriais que desempenham tarefas como pintura, soldagem e montagem é o elétrico. Isso se deve ao fato de que esse tipo de acionamento pode ser controlado mais facilmente com a obtenção de certa precisão. Entretanto, o uso de um acionamento pneumático possui suas vantagens, que estão relacionadas ao fato de esta ser uma tecnologia limpa, de baixo custo, fácil manutenção e com uma boa relação peso/potência. Por outro lado, tem-se as não linearidades presentes no sistema devido à alta compressibilidade do ar, ao atrito presente principalmente nas vedações e o escoamento na servoválvula (GUENTHER et al., 2006). Uma não linearidade comum nestas válvulas é a zona morta, que se trata de uma imperfeição onde a largura do carretel é maior do que a abertura de passagem do orifício (VALDIERO, 2012). Dessa maneira, faz-se necessária a implementação
16 16 de um controle baseado na modelagem matemática dos sistemas, a fim de analisar o seu comportamento dinâmico e fazer com que este funcione da maneira desejada (BAVARESCO, 2007). O presente trabalho descreve a adaptação e implementação de controle em um robô do tipo Gantry de acionamento pneumático, o qual será adequado para a realização de tarefas do tipo pick-and-place. Estas tarefas consistem basicamente em pegar objetos e posicioná-los em determinado local. 1.2 Objetivos O presente trabalho de conclusão de curso tem por objetivo adequar e implementar uma estratégia de controle em um robô do tipo Gantry de acionamento pneumático para a execução de tarefas do tipo pick-and-place. O desenvolvimento das atividades se deram no Núcleo de Inovação em Máquinas Automáticas e Servo Sistemas (NIMASS/ UNIJUÍ Câmpus Panambi, credenciado pela Agência Nacional de Petróleo _ ANP em 13 de outubro de 2014, portaria no do D.O.U). Este projeto visa utilizar componentes que estejam disponíveis na universidade, a fim de minimizar gastos, dessa forma, tais elementos não foram especificamente dimensionados para esta bancada, mas sim, combinados para que juntos possam formar um equipamento funcional. Este trabalho também tem por objetivo ampliar a interação entre aluno, universidade e empresa privada, na busca pela solução de problemas. Os objetivos específicos a serem alcançados no decorrer do trabalho são os seguintes: Fazer melhorias com base no estudo dos antecedentes de pesquisa; Desenvolver ou adaptar um efetuador final adequado para o robô Gantry; Desenvolver e implementar computacionalmente uma estratégia de controle para o robô; Realizar o planejamento da trajetória para uma dada aplicação de posicionamento de peça; Realizar testes; Analisar resultados e propor melhorias.
17 Metodologia A metodologia adotada para a realização deste trabalho consiste na revisão bibliográfica, na adaptação e melhorias da estrutura mecânica e sistema pneumático do robô, na implementação de uma estratégia de controle e na realização de testes experimentais para a obtenção dos resultados. A revisão bibliográfica foi baseada na literatura recente e principalmente nos antecessores do grupo de pesquisa, os quais determinaram parâmetros necessários e levantaram através dos testes alguns dos pontos fracos que poderiam ser revistos para o melhor desempenho do protótipo. O robô foi modificado e por fim testado utilizando a estruturas e os recursos disponíveis no Núcleo de Inovação em Maquinas Automáticas e Servo Sistemas (NIMASS) da UNIJUÍ campus Panambi. Para a realização deste trabalho utilizou-se as metodologias de projeto propostas por Back (2008) e Valdiero (1999). O projeto do conceitual dos sistemas pneumáticos foi feito dentro da norma ISO 1219, através de software. Já o projeto das peças foi feito com auxílio de software de CAD, a partir da maquete eletrônica do robô previamente desenhada. 1.4 Organização do trabalho O trabalho é dividido em 5 capítulos. No segundo capítulo é apresentada a revisão bibliográfica. No terceiro capítulo é feita a descrição do robô Gantry de acionamento pneumático, mostrando um pouco da sua evolução até o seu estado inicial onde este trabalho se iniciou. No quarto capítulo descreve-se o desenvolvimento e a implementação das melhorias feitas. Por fim, no quinto capítulo, é apresentado o planejamento de trajetória e os testes realizados bem como os resultados com eles obtidos para a aplicação proposta.
18 18 2 REVISÃO BIBLIOGRÁFICA 2.1 Robótica Industrial A robótica é o estudo de diferentes áreas como a engenharia mecânica, a engenharia elétrica e a inteligência artificial (ROSÁRIO, 2005). Já a robótica industrial é a disciplina que envolve o projeto, controle e aplicação dos robôs especificamente na área industrial (SICILIANO et al., 2009). Segundo a ISO 10218, o robô industrial é uma máquina manipuladora, com vários graus de liberdade, controlada automaticamente, reprogramável, multifuncional, que pode ter base fixa ou móvel para utilização em aplicações de automação industrial. Ou seja, é uma máquina que pode realizar mais de um tipo de tarefa a partir da sua reprogramação e de uma simples adaptação. O robô industrial surgiu da união entre tele operadores, desenvolvidos durante a Segunda Guerra Mundial para o manuseio de materiais radioativos, e máquinas de controle numérico, desenvolvidas pela necessidade de se produzir peças com maior precisão dimensional (SICILIANO et al., 2009). Em nossa sociedade atual, tem-se cada vez mais a necessidade de realizar a tarefas com mais eficiência e precisão. Além do mais, tem-se aquelas tarefas que são difíceis, arriscadas ou até mesmo impossíveis de serem executadas pelos seres humanos, necessitando assim de dispositivos mecatrônicos para realiza-las (ROSÁRIO, 2005). Esse termo mecatrônica é o resultado da combinação de mecânica, eletrônica e processamento digital em produtos de consumo, que passou a ser utilizado no final da década de 70 (ROSÁRIO, 2005). Os robôs em geral podem ser divididos em três partes principais: mecanismo, acionamento e sistema de controle História Segundo Siciliano et al. (2009) termo robô, foi introduzido no ano de 1920 pelo escritor Karel Capek em uma de suas peças. Ele foi derivado do termo robota
19 19 que por sua vez significa trabalho. A imagem do robô até então era tida como uma criatura orgânica semelhante ao seu criador. Isso começou a mudar a partir de 1940, quando o russo Isaac Asimov, um escritor de ficção científica, concebeu-o como uma criatura com aparência semelhante a do ser humano, porém desprovido de sentimentos. Dando dessa forma uma imagem de artefato mecânico a ele (SICILIANO et al., 2009). Segundo Siciliano et al. (2009), a robótica fundamenta-se em três leis: 1.ª) Um robô não pode fazer mal a um ser humano e nem consentir, permanecendo inoperante, que um ser humano se exponha a situação de perigo. 2.ª) Um robô deve obedecer sempre as ordens de seres humanos, exceto em circunstancias em que essas ordens entrem em conflito com a 1.ª lei. 3.ª) Um robô deve proteger a sua própria existência, exceto em circunstâncias que entrem em conflito com a 1.ª e a 2.ª leis. Posteriormente, acrescentou-se a lei zero da robótica (CLARK, apud ROMANO, 1993): Lei 0) Um robô não deve fazer mal a humanidade, ou, permanecer passivo numa situação que prejudique a humanidade. Foi a partir do século XX, devido a necessidade de aumentar a produtividade e qualidade dos produtos, que a robótica industrial começou a ganhar força. E com os avanços tecnológicos no ramo de computadores, passou a se obter uma melhora do seu desempenho e redução do seu custo (ROSÁRIO, 2005). Os primeiros robôs industriais surgiram na década de Eles foram resultado da junção de duas tecnologias: máquinas de controle numérico e dispositivos tele operados (SICILIANO et al., 2009). Em 1961, o primeiro robô industrial entrou em funcionamento. Ele foi desenvolvido pela empresa Unimation, cujo um de seus fundadores George C. Devol foi o responsável pela patente de princípios de utilização de um manipulador programável aprovada em 1961 (NOF, 1999).
. 2.1.2 Classificação dos robôs industriais Segundo Siciliano et al.")
20 20 No entanto, o preço dos robôs nesta época era muito alto tornando-os acessíveis a poucas empresas. Mas a partir de 1976, com o avanço da microeletrônica, os preços começaram a cair e a capacidade de processamento de informações aumentou muito tornando-os muito mais acessíveis (ROSÁRIO, 2005) Classificação dos robôs industriais Segundo Siciliano et al. (2009), a forma mais comum de classificação dos robôs industriais é quanto a sua estrutura mecânica. Esta é composta por uma sequência de corpos rígidos, também conhecidos como elos, que são interligados pelas articulações, ou juntas, que garantem o movimento relativo entre estes componentes. Estas juntas podem ser deslizantes, rotativas ou do tipo bola-e-encaixe, como mostra a Figura 1. As juntas deslizantes permitem o movimento linear entre dois vínculos, enquanto as juntas rotativas permitem movimentos de rotação os vínculos. No caso da junta do tipo bola-e-encaixe, tem-se basicamente uma combinação de três juntas rotativas. No entanto, as mais empregadas são as duas primeiras (ROSÁRIO, 2005). Figura 1 - Representação das juntas deslizante a), rotativa b) e tipo bola-e-encaixe c). Fonte: Rosário (2005). Segundo a Federação Internacional de Robótica, as principais configurações de robôs são: o articulado, o cartesiano, o cilíndrico, o Scara e o paralelo. O robô articulado, representado na Figura 2, tem as juntas e movimentos parecidos com os de um braço humano, sendo constituídos por três juntas rotativas
21 21 (RRR). Ele foi projetado para atender as necessidades da indústria automobilística, porém possui uma grande área de atuação. Entretanto, possui baixa rigidez mecânica e controle complicado devido às juntas rotativas (ROSÁRIO, 2005). Figura 2: Representação e volume de trabalho de um robô articulado. Fonte: Rosário (2005). Já os robôs cartesianos se deslocam verticalmente e horizontalmente em linha reta. Eles são compostos por três juntas prismáticas (PPP), dispostas de forma ortogonal entre si, como pode-se observar na Figura 3. Os mesmos são caracterizados pelo pequeno volume de trabalho, elevada rigidez mecânica, grande precisão e controle simples (ROSÁRIO, 2005). Figura 3: Representação e volume de trabalho de um robô cartesiano. Fonte: Rosário (2005). Dentro dessa configuração, pode-se ter ainda uma estrutura do tipo pórtico (Gantry), conforme Figura 4. Com esse tipo de estrutura tem-se um maior volume de trabalho permitindo assim, o manuseio de peças maiores e mais pesadas. Como
22 22 principais aplicações, tem-se o manuseio de materiais e montagem (SICILIANO et al., 2009). Figura 4 - Representação de um robô Gantry. Fonte: Siciliano et al (2009). Os robôs cilíndricos ou de coordenadas cilíndricas, por sua vez, são caracterizados pela combinação de movimentos lineares e rotacionais, como mostra a Figura 5, sendo constituídos por uma junta rotativa e duas prismáticas (RPP). Esse tipo de robô possui uma área de trabalho maior em relação ao cartesiano, porém a rigidez ainda é inferior e o controle mais complicado (ROSÁRIO, 2005). Figura 5: Representação e volume de trabalho de um robô cilíndrico. Fonte: Rosário (2005). O robô do tipo Scara (Selective Compliance Assembly Robot Arm) possui duas juntas rotativas em paralelo e uma prismática perpendicular a este plano, conforme a Figura 6. Esta configuração de robô é normalmente utilizada na montagem de componentes pequenos tendo um volume de trabalho aproximadamente cilíndrico (ROMANO, 2002).
.")
23 23 Figura 6: Representação e volume de trabalho de um robô Scara. Fonte: Rosário (2005). E o robô paralelo, diferentemente dos demais, possui mecanismo em forma de cadeia cinemática fechada e configuração do tipo plataforma. (Figura 7). O volume de trabalho possui um formato aproximadamente semiesférico (ROMANO, 2002). Figura 7: Representação de um robô Paralelo. Fonte: Rosário (2005) Atuadores Os atuadores são os elementos responsáveis por transformar um tipo de energia em movimento. Os tipos mais comuns de energia empregadas no acionamento dos atuadores são a pneumática, elétrica e hidráulica. No acionamento elétrico, tem-se como exemplo os motores elétricos (Figura 8), que podem ser de passo, de corrente contínua ou alternada. As vantagens para o uso deste tipo de acionamento são o controle preciso, a fácil manutenção e a fonte de energia acessível (ROSÁRIO, 2005). Os robôs de acionamento elétrico são os

, devido ao ambiente inflamável.")
24 24 mais populares para aplicações diversas, principalmente aquelas que exigem maior precisão (ASFAHL, 1992). Figura 8 - Motor elétrico. Fonte: Weg (2016). No caso do acionamento hidráulico, necessita-se de uma unidade hidráulica composta por motor e cilindro a fim de comprimir o óleo. Algumas das vantagens da hidráulica são o momento alto e constante e a precisão de operação (ROSÁRIO, 2005). Robôs hidráulicos são importantes em atividades como a de pintura (Spray- Paint), devido ao ambiente inflamável. Os primeiros exemplares foram utilizados na indústria automobilística, principalmente para fazer solda ponto (spot welding). No entanto, a sua importância em relação aos demais acionamentos vem caindo (ASFAHL, 1992). Na Figura 9 tem-se a ilustração de um atuador hidráulico. Figura 9 - Cilindro hidráulico. Fonte: Parker (2003). Quanto ao sistema pneumático, ele é semelhante ao hidráulico, porém utiliza o ar como fluido de trabalho. Esse tipo de acionamento possui vantagens como altas velocidades, custo baixo e fácil manutenção. No entanto, ele ainda é pouco utilizado em robôs por ser pouco preciso (ROSÁRIO, 2005). Outras vantagens da pneumática

25 25 são a boa relação peso/potência, o fato de ser uma energia facilmente transportável e armazenável, utilizável em ambientes explosivos e de fácil integração com a microeletrônica (BOLLMANN, 1996). Na Figura 10 tem-se a ilustração de um atuador pneumático. O robô de acionamento pneumático é um dos mais baratos e práticos para a execução de tarefas do tipo pick-and-place assim como a alimentação de máquinas (ASFAHL, 1992). Figura 10 - Atuador pneumático. Fonte: Festo (2016). 2.2 Cinemática A cinemática do robô consiste na descrição do movimento em relação a um sistema de referência fixo, sem levar em consideração as forças e momentos por este gerado. É por tanto a relação analítica entre as variáveis de junta e a posição e orientação do efetuador final (SICILIANO et al., 2009). A cinemática direta tem como objetivo determinar a localização (posição e orientação) do efetuador final, em relação a um sistema de coordenadas de referência. Essa localização é resultado do movimento relativo de cada uma das juntas do robô (NOF, 1999). Já a cinemática inversa, como o próprio nome sugere, é o inverso da cinemática direta. Ela é utilizada para encontrar os valores das variáveis de junta que irão posicionar o efetuador final no local desejado (NOF, 1999) Convenção de Denavit-Hartenberg Para a determinação da equação da cinemática direta, pode-se utilizar a convenção de Denavit-Hartenberg. Ela possibilita determinar a posição relativa entre
26 26 duas juntas consecutivas em cadeia aberta. Para isso, deve-se definir um sistema de coordenadas fixo em cada um dos elos. Pode se dividir a convenção de Denavit- Hartenberg em basicamente 4 etapas: 1ª etapa: Determinação dos sistemas de coordenadas: A primeira etapa consiste na representação dos sistemas de coordenadas em cada um dos elos do robô. Ela é feita da seguinte forma: 1º passo: Representa-se o eixo Z i 1 no eixo da junta i. 2º passo: Representa-se o eixo Xi, na normal comum entre Z i 1 e Z i. 3º passo: Determina-se o Y pela regra da mão direita. 2ª etapa: Definição dos parâmetros de Denavit-Hartenberg: Aqui são definidos os parâmetros em relação aos sistemas de coordenadas definidos anteriormente: a i : é a distância na normal comum entre Z i 1 e Z i. α i : é o ângulo entre Z i 1 e Z i em torno de X i. θ i : é o ângulo entre X i 1 e X i em torno de Z i 1. d i : é a posição do eixo X i em relação ao X i 1 ao longo do eixo Z i 1. 3ª etapa: Matriz de transformação homogênea: Uma vez determinados os parâmetros de Denavit-Hartenberg, é possível deduzir a matriz de transformação homogênea da equação (1) que relaciona o elo i com o elo anterior i i 1. cos θ i sen θ i. cos α i sen θ i. sen α i a i. cos θ i A i 1 sen θ i =[ i cos θ i. cos α i sen θ i. cos α i a i. sen θ i ] 0 sen α i cos α i d i ª etapa: Matriz de transformação para o sistema de referência: A partir das matrizes de transformação homogênea, que indicam a posição relativa elo i. com i i 1, pode-se obter a posição e orientação do último sistema (efetuador final) em relação ao de referência na base do robô. Isso é feito da seguinte maneira: T 0 3 = A 0 1. A A 3 2
27 Controle O controlador é parte fundamental em um sistema de controle. Ele é o responsável por comparar o valor de saída do sistema com o desejado determinando assim o erro e enviando um sinal a fim de reduzi-lo. Na robótica industrial, o controlador mais comum é o que combina ações de controle proporcional, integral e derivada (PID), que possui um bom desempenho desde que o sistema seja linear e invariante no tempo (ROSÁRIO, 2005). O controle proporcional detecta o erro do processo e faz uma correção proporcional ao mesmo. Se o valor do ganho do controlador proporcional (Kp) for alto, a resposta do sistema será rápida. No entanto, se este ganho for alto demais o sistema pode se tornar instável. Esse controle não consegue eliminar totalmente o erro, pois este pode ser muito pequeno para ser detectado pelo sensor do processo (ASFAHL, 1992). Este erro remanescente pode ser corrigido com o uso de um controle integral. Nesse caso, coleta-se os dados do erro acumulado e aplica-se uma correção proporcional (Ki) ao erro total acumulado ao longo do tempo. Dessa forma é interessante utilizar um controle proporcional e integral, o proporcional para prover rapidez na resposta ao erro e o integral para eliminar o erro que permanece por ser muito pequeno (ASFAHL, 1992). Já o controle derivativo não leva em consideração o nível de erro ou o seu acumulado ao longo do tempo, mas aplica uma correção proporcional (Kd) a velocidade na qual o erro está se desenvolvendo. A partir do momento em que o controle proporcional detecta o erro, o controle derivativo atua contra o mesmo antecipando o sinal de controle (ASFAHL, 1992). A estratégia de controle mais simples utilizada na robótica industrial é a de controle descentralizado, na qual se considera o manipulador como sendo formado por juntas independentes. Neste caso tem-se um controle independente de juntas, no qual cada variável de junta é controlada separadamente (SICILIANO et al., 2009).

28 28 3 ROBÔ GANTRY DE ACIONAMENTO PNEUMÁTICO 3.1 Introdução Neste capítulo serão apresentados os antecedentes do robô Gantry de acionamento pneumático, com um breve histórico desde o seu desenvolvimento inicial até o estado em que se encontrava no início deste trabalho. Em seguida será feita uma descrição mais detalhada do seu mecanismo, acionamento e sistema de controle. 3.2 Antecedentes A proposta de desenvolvimento do robô pneumático partiu originalmente da necessidade de atender as reclamações dos compradores de painéis metálicos para a montagem de quadros elétricos. As reclamações eram referentes a qualidade do acabamento final dos painéis de aço inox, que não era uniforme devido ao fato do processo de escovação ser feito de maneira manual com o auxílio de uma lixadeira elétrica. A partir desta necessidade, o manipulador foi desenvolvido e construído por Schneider (2006), no campus Panambi da UNIJUÍ, como Trabalho de Conclusão de Curso em Figura 11. Figura 11 - Foto do manipulador. Fonte: Bavaresco (2007).

29 29 Dando continuidade a esta proposta, Schmidt (2007) desenvolveu ainda um dispositivo de acionamento pneumático para a fixação e movimentação dos painéis para garantir uma maior produtividade do processo de lixamento. Todas as guias do robô, tanto para o acionamento na horizontal quanto na vertical, eram cilíndricas e feitas a partir de tubos industriais e nylon, visando manter o custo baixo e a fácil manutenção e construção. Depois de sua construção, o robô serviu como bancada experimental para os alguns trabalhos. Entre eles pode-se citar o de Bavaresco (2007), Luft (2008) e Endler (2009), que realizaram estudos e testes ou melhorias. Posteriormente outras modificações importantes foram feitas por Maraschin (2015) e Lopes (2015) através das necessidades apuradas. Na Figura 12 tem-se uma foto do robô mostrando como ele se encontrava no início deste trabalho. Figura 12 - Foto do robô com melhorias e adaptação para o processo de rebarbamento. As alterações principais em relação a versão inicial da Figura 11, foram a substituição das guias, para aumentar a resistência devido a flexão que ocorria nas antigas e o efetuador final foi adaptado para fazer o rebarbamento de peças metálicas com uma esmerilhadeira pneumática. A seguir serão descritos o mecanismo e os sistemas de acionamento e controle básico do robô.

30 Mecanismo O mecanismo do robô, descrito na Figura 13, possui como base uma estrutura metálica rígida com 2130 mm de comprimento, 1340 mm de largura e uma altura de 1040 mm. Ela possui uma mesa de trabalho, sobre a qual o efetuador final atua e uma mesa para os componentes do sistema pneumático. Figura 13 - Descrição do mecanismo do robô. O elo 1 é ligado ao elo 0 através de duas guias lineares que estão montadas sobre a estrutura. Já o elo 2 está ligado ao elo 1 apenas por uma guia linear, enquanto o outro lado é livre para ser acoplado a um atuador. Para o controle do avanço do elo 3 tem-se duas guias montadas no elo 2. O elo 1, o qual se desloca no sentido do eixo da junta 1, é constituído de chapas metálicas de 2,65 mm de espessura, assim como a estrutura da base, com flanges em suas laterais afim de lhe garantir maior resistência. No caso do elo 2, tem-se uma chapa de 3 mm de espessura, na qual estão montadas a guias. Guias estas que fazem a ligação do elo 2 com o elo 3, onde temse um flange ISO padronizado para a montagem dos efetuadores finais.

31 Acionamento O robô é acionado pneumaticamente, dessa forma ele utiliza cilindros pneumáticos para gerar o movimento linear a partir da energia do ar comprimido. São três os atuadores empregados, dois deles com haste e um sem conforme a Figura 14. Figura 14 - Componentes do sistema de acionamento do robô. Os atuadores 1 e 2 são responsáveis pelos movimentos horizontais nos sentidos dos eixos das juntas 1 e 2, respectivamente. Já o atuador 3 é responsável pela movimentação na vertical, no sentido do eixo da junta 3, possibilitando o avanço e recuo do efetuador final. Para fazer o controle da direção e da vazão do ar comprimido que vai para cada cilindro, são utilizadas servoválvulas como a mostrada na Figura 15.

32 32 Figura 15 - Foto da servoválvula. Este tipo de válvula possui uma resposta proporcional ao sinal de tensão a ela enviado. Ela trabalha em uma faixa de tensão de 0 a 10 V. Com 0 V, a válvula se encontra aberta para um dos lados, com aproximadamente 5 V, ela está centralizada e com 10 V está aberta para o outro lado. No entanto, para fins de controle este sinal é convertido. Ela é acionada de - 10 V, onde se encontra aberta para um dos lados, a 10 V onde se encontra aberta para o outro. Quando a tensão for de 0 V a válvula encontra-se fechada, ou centralizada, não permitindo a passagem do ar para nenhuma das posições. O ar comprimido que chega até as válvulas, é primeiramente tratado através de uma unidade de condicionamento de ar comprimido, conforme a Figura 16. Esta unidade é composta por filtro, que retira a humidade e as impurezas do ar, regulador de pressão, para o ajuste da pressão de trabalho do robô e lubrificador, usado principalmente no caso de motores e ferramentas pneumáticas afim de evitar o seu desgaste.


33 33 Figura 16 - Unidade de conservação de ar comprimido. Outro componente ligado ao sistema é o reservatório de ar comprimido, mostrado na Figura 17. Este elemento permite que se tenha uma reserva de ar comprimido no sistema com a finalidade de estabilizar a pressão de suprimento, evitando as quedas de pressão durante a operação. Figura 17 - Reservatório de ar comprimido. Na Figura 18 tem-se a representação do esquema pneumático de acionamento dos três eixos do robô com os elementos citados anteriormente, feito conforme a ISO 1219.
34 34 Figura 18 - Sistema de acionamento pneumático básico. Na Tabela 1 estão descritos os elementos básicos do sistema pneumático de acionamento do robô Gantry. Tabela 1 - Descrição dos componentes do sistema antigo. Item Descrição Especificações Fabricante Código do catálogo 1 Cilindro pneumático diferencial Diâmetro:100 mm. Curso: 500 mm. FESTO DMC PPV 2 Cilindro pneumático Diâmetro:25 mm. REXROTH sem haste Curso: 1000 mm. 3 Cilindro pneumático diferencial Diâmetro:40 mm. Curso: 160 mm. FESTO DMC PPV 4 Válvula direcional proporcional 5/2, centro fechado. Vazão nominal: 0,7 FESTO MPYE-5-1/8- HF-010-B m 3 /s 5 Unidade de conservação de ar Filtro, regulador e lubrificador. FESTO FRC-3/8-D- 5M-MIDI 6 Reservatório de ar Diâmetro:100 mm. Comprimento: 500 mm. PROAR RA

35 Sistema de controle Para o controle do robô e aquisição de dados é utilizada uma estação de trabalho que conta com um computador, uma placa de controle e uma fonte de alimentação como mostra a Figura 19. Figura 19 - Estação de trabalho. O controle do robô é implementado em diagrama de blocos através do software Simulink. Ele por sua vez é uma extensão do Matlab que permite modelar, testar e também analisar sistemas dinâmicos. Instalada ao computador tem-se a placa de controle dspace DS1104, conforme a Figura 20, que permite a prototipagem rápida de controle. Nela é gravado o controle que foi desenvolvido no Simulink.


36 36 Figura 20 - Placa de controle (dspace). Esta placa recebe os sinais provenientes dos sensores, tanto de posição quanto de pressão, que são alimentados pela fonte da Figura 21. Ela está regulada para uma tensão de saída de 24 V, embora alguns sensores necessitem de uma tensão mais baixa, para os quais tem-se um circuito que converte a tensão para 15 V. Figura 21 - Fonte de alimentação. Os sinais de posição são obtidos por meio de transdutores de posição que estão dispostos em cada um dos eixos de junta. Estes sinais vão para a placa de controle e alimentam o sistema que está nela. A partir disso, ela envia os sinais de controle às servoválvulas conforme necessário para a obtenção da posição desejada. Na Figura 22 tem-se um desenho esquemático que mostra a interação entre os sensores citados e a estação de trabalho.


37 37 Figura 22 - Desenho esquemático da interação entre a estação de trabalho e o robô. A partir do software da placa, o ControlDesk, pode-se interagir em tempo real com a mesma. Com ele é possível alterar as variáveis do sistema de controle que foram gravadas na placa, como os ganhos do controlador, além de obter os dados provenientes do mesmo através de uma interface que pode ser desenvolvida e modificada pelo usuário. Na Figura 23 tem-se um exemplo de layout criado. Figura 23 - Criação de layout no ControlDesk.
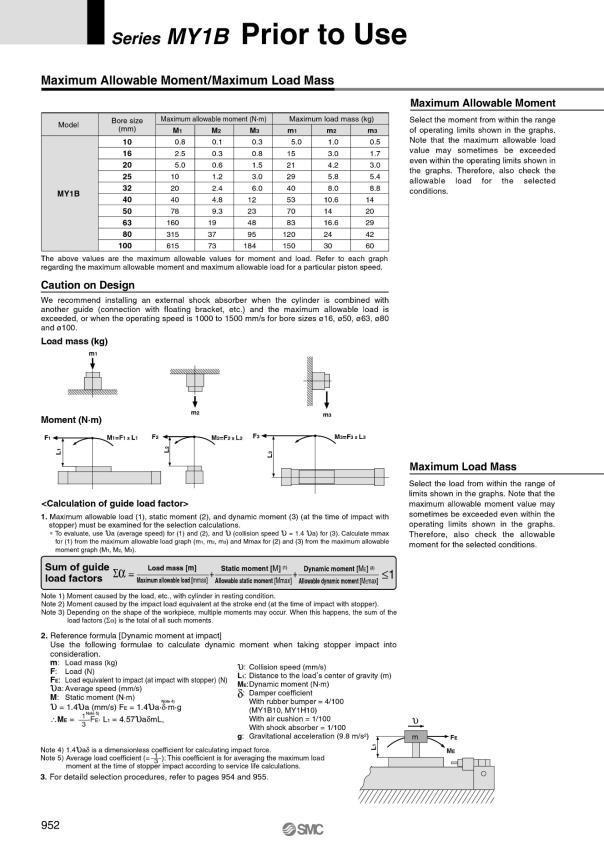
38 38 4 DESENVOLVIMENTO DAS MELHORIAS 4.1 Introdução Este capítulo irá descrever o processo de desenvolvimento e implantação das melhorias no robô Gantry de acionamento pneumático, visando melhorá-lo e adequá-lo para a realização de tarefas do tipo pick-and-place e manipulação de peças e materiais em geral. Para atender a tais requisitos foram feitas modificações nos sistemas de acionamento, controle e no efetuador final afim de aumentar a precisão e possibilitar o manuseio de componentes através de um dispositivo adequado. Salvo algumas peças que foram feitas em parceria com empresa local, as demais melhorias foram desenvolvidas utilizando estrutura e materiais disponíveis no NIMASS. 4.2 Troca do cilindro sem haste A primeira modificação feita foi a troca do cilindro sem haste do robô, responsável pelo acionamento na junta 2. De acordo com os trabalhos de Maraschin (2015) e Lopes (2015), pode-se observar que durante a realização de determinada trajetória, o maior erro de posicionamento apresentado foi o do cilindro sem haste. Esta dificuldade no controle, segundo Lopes (2015), se deve ao fato de que o seu diâmetro é pequeno o que dificulta o controle causando maior instabilidade. Segundo Maraschin (2015), em um cilindro de maior diâmetro a servoválvula trabalha mais aberta e desta forma o atuador pneumático torna-se mais estável, facilitando o controle de posição do mesmo. Tendo isso em vista, optou-se pela substituição do antigo atuador, que possuía um diâmetro de 25 mm, por um novo cilindro com o dobro de seu diâmetro, afim de solucionar este problema. Na Figura 24 tem-se o desenho do cilindro da marca SMC de código MY1B , que possui um diâmetro de 50 mm e os mesmos 1000 mm de curso do cilindro anterior.
 e Back (20")
39 39 Figura 24 - Cilindro pneumático sem haste. Escolhido o atuador, o próximo passo foi o desenvolvimento da sua adaptação na estrutura do robô. Para isso, aplicou-se uma metodologia de projeto baseada na proposta por Valdiero (1999) e Back (2008), disposta a seguir Análise das Necessidades Na primeira etapa, chamada de Análise das Necessidades, foram identificadas e listadas as necessidades para o projeto das peças afim de fazer a adaptação do novo atuador. Foram levadas em consideração as limitações do atuador além das características desejadas do robô. A seguir tem-se listadas as necessidades apuradas: Fixar atuador sobre o elo 1 do robô; Prover ligação entre o carrinho do atuador e o elo 2 do robô; Manter o atuador dentro dos limites da estrutura do robô; A carga deve ser aplicada na direção do carrinho do cilindro; Interferir o mínimo possível na estrutura e disposição dos elementos do robô. Peças devem ser simples e de fácil fabricação. A partir destas necessidades, pode-se fazer o projeto conceitual, preliminar e detalhado das peças necessárias para a adaptação.

40 Projeto Conceitual No projeto conceitual, utilizou-se o software de CAD SolidWorks para gerar ideias com base na maquete eletrônica do robô previamente desenhada. Nesta etapa, pensou-se no formato das peças afim de aproveitar furações já existentes e evitar interferências desnecessárias na estrutura e posição de componentes. O atuador foi posicionado com o carrinho para cima, para que a carga referente ao elo 2 e 3 atue na direção do mesmo. Assim pode-se aproveitar ao máximo a capacidade de carga do cilindro, no caso aproximadamente 700 N conforme especificado no catálogo, conforme o Anexo A. Ele também foi deslocado do centro da estrutura para mantê-lo dentro dos limites da mesma. No fim desta fase, chegou-se a concepção inicial de três peças, duas para a fixação do atuador no elo 1 do robô (1) e (2) e uma para fazer a ligação do carrinho ao elo 2 (3), conforme a Figura 25. Figura 25 - Projeto conceitual das peças Projeto Preliminar Na etapa de projeto preliminar, foram feitas as simulações computacionais para dimensionar e garantir a resistência das peças a partir dos conceitos criados. Os componentes foram dimensionados com base em simulações estáticas a partir das solicitações estimadas. Com o intuito de padronizar a matéria prima, optou-se por utilizar a mesma espessura de chapa de 3 mm e o mesmo material, no caso um aço 1020 galvanizado, para todas as peças.

41 41 As peças de fixação do atuador ao elo 2 do robô, através de simulações estáticas, se mostraram resistentes o suficiente para a aplicação já que a tensão máxima de von Misses não ultrapassou o limite de escoamento do material, como mostra a Figura 26. As simulações foram realizadas com uma carga aplicada de 430 N, referente ao atuador e sua carga máxima aceitável. Figura 26 - Simulação estática da peça (1). A peça de ligação entre o carrinho do atuador e o elo 2 foi dimensionada pensando no manuseio de peças, ou seja, com a carga aplicada para baixo. Na Figura 27 tem-se os resultados obtidos, podendo-se notar que o limite de escoamento não foi ultrapassado. Figura 27 - Simulação estática com carregamento vertical da peça (3).

42 42 Ela também foi simulada considerando uma situação de carregamento máximo do atuador. No entanto, para carga máxima a peça sofre um deslocamento resultante considerável o que se não levado em conta, pode prejudicar o posicionamento do efetuador final. Por isso, para uma aplicação de maior precisão, é aconselhável a utilização de cargas baixas, de até 50 N, nas quais a deformação resultante é bem menor. Outra situação que precisou ser levada em conta foi a possibilidade de o atuador atingir o seu fim de curso. Como o robô é utilizado como bancada de testes, muitas vezes o atuador bate no fim de curso. Sendo assim, aplicou-se uma carga de 1375 N estimada através da força pneumática do atuador para uma pressão de 7 bar. Esta força pode ser obtida a partir da equação (3), onde a força liquida do cilindro (F) está relacionada a área do embolo (A) do atuador e a pressão (P). F = A. P 3 Na Figura 28 tem-se o resultado da simulação realizada para esta força, que foi aplicada na horizontal da parte superior da peça. Figura 28 - Simulação estática com carregamento na horizontal da peça (3). Feitas as simulações e obtendo os resultados satisfatórios quanto a capacidade das peças de exercerem a função para a qual as mesmas foram

43 43 projetadas, pode-se passar para a próxima etapa do projeto. A seguir será feito o projeto detalhado destes componentes Projeto Detalhado Feita as simulações as peças foram então especificadas, tanto as dimensões quanto a matéria prima, para serem mandadas para a fabricação conforme os Apêndices A, B e C. Na Figura 29 tem-se as peças prontas antes de serem montadas. Figura 29 - Peças para adaptação do atuador. As peças prontas foram então verificadas e como resultado tem-se na Figura 30 as peças montadas adaptando o novo atuador pneumático no robô.

44 44 Figura 30 - Fotos dos componentes montados. 4.3 Efetuador final O efetuador final é o elemento que vai interagir com a peça de trabalho ou ambiente em si. Como a atividade proposta para ser realizada foi o pick-and-place é preciso dispor de uma ferramenta adequada para a sua execução. Entre garras pneumáticas de dois e três dedos disponíveis, optou-se pela ventosa. A escolha foi feita pensando no manuseio de peças de diferentes tipos sem que sejam necessárias modificações. Nesse ponto, as garras são limitadas quanto a variação de forma e dimensão, devido ao seu curso limitado. No caso da ventosa, a peça a ser manuseada precisa basicamente de uma superfície lisa para a aderência da mesma.


45 45 Optou-se então por uma ventosa do tipo fole como mostra a Figura 31, a qual está especificada no Anexo B. Foi escolhido este tipo de ventosa, pois ela permite uma maior compensação de altura. Figura 31 - Ventosa do tipo fole. Para a geração do vácuo foi escolhida a geradora com o princípio de Venturi mostrada na Figura 32. As especificações técnicas deste dispositivo estão no Anexo C. Geradoras com este princípio de funcionamento são utilizadas para o manuseio de peças leves. Figura 32 - Geradora de vácuo. A partir da escolha dos componentes necessários para executar a função fezse o projeto conceitual do efetuador final conforme a Figura 33.

46 46 Figura 33 - Efetuador final proposto. A ventosa geralmente é montada diretamente na geradora de vácuo. No entanto, como não se tinha uma compatibilidade de rosca, utilizou-se uma conexão rápida para fazer a ligação entre as duas através de uma mangueira de 8 mm. Um tubo quadrado foi utilizado como estrutura para os componentes e como ligação dos mesmos ao manipulador. A geradora de vácuo foi montada próxima a ventosa a fim de minimizar as perdas de carga geradas pelo escoamento do ar dentro do tubo. A furação para o acoplamento entre o efetuador final e o robô foi feita conforme a ISO Após escolher os componentes, fazer o projeto conceitual e o detalhamento do mesmo conforme os Apêndices D e E, o efetuador final foi enfim construído e montado. A Figura 34 mostra o efetuador montado e acoplado a flange de acoplamento do robô.


47 47 Figura 34 - Efetuador final montado no robô Para o acionamento da geradora de vácuo, adicionou-se ao sistema uma válvula on/off, conforme a Figura 35. Ela é uma válvula solenoide de comutação rápida com duas posições que permite bloquear a passagem de ar na geradora e liberar com a aplicação de determinada tensão mínima. No Anexo D estão as especificações da mesma. Figura 35 - Foto da válvula on/off. Com isso, o sistema pneumático completo proposto para a aplicação está mostrado na Figura 36.

48 48 Figura 36 - Sistema pneumático completo Posição das válvulas Outra alteração feita foi quanto a posição das servoválvulas e também da válvula on/off. Como pode-se observar na Figura 37, elas estavam posicionadas na mesa de montagem dos equipamentos. Figura 37 - Disposição inicial das servoválvulas. Com essa disposição, tem-se uma maior perda de carga entre as válvulas e seus atuadores devido à grande distância que é percorrida através dos tubos. Essa

49 49 perda de carga não é conhecida como a das válvulas e nem linear. Ela varia de acordo com a velocidade do escoamento do ar comprimido e características do tubo. Visando minimizar estes efeitos, as servoválvulas foram montadas mais próximas de seus atuadores conforme a Figura 38. Dessa forma tem-se um menor comprimento de tubo, o qual o ar comprimido precisa percorrer para chegar ao atuador. Figura 38 - Montagem das válvulas. 4.5 Sistema de controle O controle do robô será feito de maneira independente na junta, ou seja, cada variável de junta será controlada separadamente. No entanto, para que se possa trabalhar com as variáveis de junta é preciso fazer a modelagem cinemática do robô. Assim pode-se obter a relação entre o sistema de coordenadas fixo, do elo 0 fixo na base do robô, com o sistema do efetuador final.

50 Modelagem cinemática Seguindo a metodologia de Denavit-Hartenberg e partindo do conhecimento dos elos e juntas do robô que foram definidos na Figura 13, fez-se primeiramente a determinação dos sistemas coordenadas, como mostra a Figura 39. Figura 39 - Representação dos sistemas de coordenadas do robô. Em seguida, conforme a Tabela 2, determinaram-se os parâmetros de Denavit-Hartenberg. Tabela 2 - Parâmetros de Denavit-Hartenberg. Elo i a i α i θ i d i Elo d 1 Elo d 2 Elo d 3 Determinados os parâmetros, os mesmos foram substituídos na matriz da equação (1).
51 51 Substituindo os valores do elo 1, tem-se na equação (4) a matriz que relaciona o sistema de coordenadas do elo 0 com o próprio sistema do elo A =[ ] d Ao substituir os parâmetros referentes ao elo 2, tem-se na Equação (5) a matriz que relaciona os sistemas de coordenadas dos elos 1 e A =[ ] d Com a substituição dos parâmetros referentes ao elo 3, conforme a Equação (6) tem-se a matriz que relaciona o sistema de coordenadas do elo 3 com o elo A =[ ] d Para obter a relação entre o elo 3 e o elo 0, precisa-se multiplicar as matrizes das equações (4), (5) e (6) determinadas anteriormente, conforme a equação (7). T 0 3 = A 0 1. A A 3 7 Dessa forma obtém-se na Equação (8) a matriz de transformação homogênea que nos dá a relação entre o efetuador final e o sistema de coordenadas da base d 3 T d 3 = [ 2 ] d A partir desta matriz tem-se a cinemática direta do robô, ou seja, dadas as variáveis de junta sabe-se onde o efetuador final está localizado e como está orientado. As primeiras três colunas da matriz da equação (8) indicam a orientação de X, Y e Z do efetuador final, respectivamente representadas nas equações (9), (10) e (11). Para este caso, pode-se observar que a orientação da ferramenta é fixa. Já a última coluna é a que indica a posição do efetuador final, que depende das variáveis de junta, como mostra a equação (12). No caso de juntas prismáticas quem varia é o d.
52 52 0 X 0 3 = [ 0] Y 0 3 = [ 1] Z 0 3 = [ 0 ] 11 0 d 3 P 0 3 = [ d 2 ] 12 d 1 Já a cinemática inversa, como o próprio nome sugere, é o inverso da cinemática direta. Sendo assim, invertendo a equação (12) tem-se a posição de X, Y e Z a partir da variável de junta. As equações (13), (14) e (15) mostram a cinemática inversa do robô. d 3 = P X 13 d 2 = P Y 14 d 3 = P Z Inclusão do modelo cinemático no controle Como controlador será utilizado o proporcional-integral (PI), que é indicado para o controle independente de junta, representado na Figura 40. No entanto, será incluído também o modelo cinemático do robô, para que se possa trabalhar com a programação das trajetórias em relação ao seu sistema de coordenadas fixo na base, ou seja, no espaço de trabalho do robô e não mais no espaço do atuador.
53 53 Figura 40 - Estratégia de controle independente de junta com controlador (PI). Para poder programar as tarefas no espaço de trabalho do robô, fez-se a conversão do espaço do atuador para as variáveis de junta (d) definidas através da modelagem cinemática. As variáveis y 1, y 2 e y 3 que aparecem na Figura 40, representam o respectivo espaço dos atuadores, ou seja, no meio do curso dos cilindros tem-se o zero, no sentido de avanço os valores são positivos e no recuo são negativos. Para converter esses valores de y que são o feedback do sistema de controle, nas variáveis de junta d, encontrou-se uma equação que representa a relação entre as duas mostrada na Figura 41.

54 54 Figura 41 - Relação entre espaço do atuador e espaço de junta. Para determinar a equação foram feitas as medições dos valores mínimos das variáveis de junta d, em relação ao sistema de referência, como mostra a Figura 42. Figura 42 - Determinação dos valores de d mínimos e máximos. Os valores máximos e mínimos de y foram encontrados a partir da leitura dos próprios sensores podendo com ela obter também o curso máximo que foi utilizado para determinar os valores máximos de d. Tendo estes valores, foram encontradas as equações (16), (17) e (18) que representam a relação mostrada na Figura 41, para cada um dos eixos do robô.
55 55 y 1 = d 1 0, y 2 = d 2 0, y 3 = d 3 0, Em seguida, os valores de trajetória que antes representavam o y desejado, foram passados para as trajetórias desejadas de X, Y e Z. Posteriormente a cinemática inversa do robô foi utilizada para obter os valores das variáveis de junta d em relação à posição de entrada. Estes valores das variáveis de junta são então comparados com o d proveniente do sinal do sensor convertido anteriormente. Para controlar a válvula on/off, foi adicionada uma trajetória para o controle da mesma. Assim pode-se programar o valor da tensão em função do tempo. Com 0 V a válvula se encontra fechada e com 2 V ela troca de posição, permitindo a passagem do ar para a geradora de vácuo. Na Figura 43 tem-se o resultado final do controlador. Figura 43 - Estratégia de controle proposta.
56 56 5 PLANEJAMENTO DE TRAJETÓRIAS E TESTES Nesta unidade será mostrado o planejamento de trajetória para o desenvolvimento de uma atividade do tipo pick-and-place. Serão abordados primeiramente os testes para a determinação dos ganhos (Kp) e (Ki) do controlador. Em seguida será feito o planejamento da trajetória e por fim serão feitos os testes e analisados os resultados. 5.1 Determinação dos ganhos para o atuador sem haste Como se trata de um controle independente de junta tem-se para cada variável de junta um com controlador (PI). Sendo assim, cada controlador tem os seus ganhos Kp e Ki a serem determinados. Aqui serão determinados apenas os ganhos do controlador do cilindro sem haste, já que o mesmo foi alterado. A determinação dos ganhos foi feita através de testes, a partir da realização de uma determinada trajetória. Foram analisadas as trajetórias, os sinais de tensão e o erro, principalmente no que diz respeito ao posicionamento que é o mais importante em se tratando de uma atividade como o pick-and-place. Primeiramente ajustaram-se os ganhos e a trajetória conforme Lopes (2015), sendo assim: Kp=10 e Ki=1,5. Foram utilizados também os mesmos parâmetros para a compensação de zona morta. Os resultados obtidos estão na Figura 44. Como o esperado para um ganho proporcional pequeno, a resposta do sistema ao erro foi lenta para um atuador de maior diâmetro. Isso pode ser observado no gráfico (a) da Figura 44, que mostra a trajetória desejada e a realizada. Quanto ao sinal da servoválvula, no gráfico (b), ele se manteve bastante constante sem grandes oscilações no trecho de posicionamento. Já o erro mostrado no gráfico (c), em consequência desta resposta lenta, tem-se grandes picos no momento de saída da inércia. Já para o trecho de posicionamento destacado e ampliado no gráfico (d), esse erro já é bem menor, no entanto se mantém na faixa de 2 mm chegando a 2,667 mm no ponto destacado.
57 57 Figura 44 - Resultados para os ganhos Kp=10 e Ki=1,5. Em seguida o mesmo teste foi feito com os ganhos ajustados em: Kp=30 e Ki=1,5. Na Figura 45 estão os resultados deste teste. Com o aumento do ganho proporcional pode-se notar no gráfico (a) da Figura 45, a melhora no segmento da trajetória. Dessa forma tem-se uma resposta mais rápida do sistema. Com isso o sinal oscilou um pouco mais e aumentou a amplitude nos picos. Ainda como resultado desta resposta mais rápida, os picos do erro diminuíram bastante. No entanto, no trecho de posicionamento destacado no gráfico (c), nota-se que o erro demorou a se estabilizar próximo de zero. O erro máximo deste trecho, destacado no gráfico (d), foi de 2,321 mm.
58 58 Figura 45 - Resultados para os ganhos Kp=30 e Ki=1,5. No próximo teste os ganhos foram ajustados em: Kp=40 e Ki=1.5. Neste caso os resultados obtidos estão na Figura 46. Neste caso o incremento feito no ganho proporcional gerou mais uma melhora no seguimento da trajetória desejada, como mostra o gráfico (a) da Figura 46. O sinal da servoválvula, mostrado no gráfico (b), não teve grandes alterações em relação ao teste anterior. A mudança mais perceptível foi no gráfico (c). Nele percebe-se que o erro se estabiliza mais rápido próximo a zero, também em relação ao caso anterior. No gráfico (d), tem-se que após se aproximar de zero, o erro máximo de posicionamento obtido foi de 0,5937 mm.
59 59 Figura 46 - Resultados para os ganhos Kp=40 e Ki=1,5. Ajustando os ganhos para: Kp=45 e Ki=1,5, obtiveram-se os resultados mostrados na Figura 47. Com estes valores dos ganhos, pode-se observar no gráfico (a) da Figura 47, que a resposta no início do movimento já está bem mais rápida. Porém, a partir do gráfico (b), percebe-se que o sinal da servoválvula tem uma oscilação maior no momento do posicionamento. Isso refletiu também no erro máximo para o trecho indicado no gráfico (c). Como destacado no gráfico (d), tem-se um erro máximo de 0,8299 mm, ou seja, maior que o anterior.
60 60 Figura 47 - Resultados para os ganhos: Kp=45 e Ki=1,5. Os ganhos foram ajustados novamente, agora para: Kp=50 e Ki=3. Os resultados estão expostos nos gráficos da Figura 48. Com esse ajuste, obteve-se um bom resultado no segmento da trajetória em si. Quanto ao sinal, nota-se uma oscilação de maior amplitude. Em relação ao erro, pode-se observar no gráfico (d) que se chegou a um bom resultado, no caso um erro máximo de 0,4127 mm, que, no entanto, foi obtido apenas no final do trecho de posicionamento.
61 61 Figura 48 - Resultados para os ganhos: Kp=50 e Ki=3. Por fim ajustaram-se os ganhos em: Kp=60 e Ki=2, tendo como resultado os gráficos da Figura 49. Para este caso, o segmento da trajetória foi muito bom com um erro máximo de toda a trajetória bem mais baixo. Por outro lado, o sinal da servoválvula ficou bastante oscilante. Quanto ao erro, ele estabiliza em uma faixa próxima de zero mais rapidamente, se comparado com o anterior. No entanto o erro máximo para o trecho assinalado voltou a subir, atingindo 0,9376 mm.
62 62 Figura 49 - Resultados para os ganhos: Kp=60 e Ki=2. Com a realização destes testes, partindo da análise feita à cima, chegou-se à conclusão de que o terceiro teste obteve os resultados mais satisfatórios. Isso pode ser observado no resumo dos resultados na Tabela 3. Tabela 3 - Resumo dos resultados. Ganhos (Kp e Ki) Erro máximo (mm) Kp=10 e Ki=1,5 2,667 Kp=30 e Ki=1,5 2,321 Kp=40 e Ki=1,5 0,5937 Kp=45 e Ki=1,5 0,8299 Kp=50 e Ki=3 0,4127 Kp=60 e Ki=2 0,9376

63 63 Com o ganho proporcional (Kp=40) e o integral (Ki=1,5), pode-se obter um segmento de trajetória razoável. O sinal da servoválvula no trecho de posicionamento oscilou em uma amplitude menor e o mais importante, obteve-se uma melhor precisão de posicionamento mais rapidamente. 5.2 Geração de trajetória A trajetória gerada tem por objetivo pegar uma determinada peça em uma posição inicial e levá-la a uma posição final. Para isso, fez-se uma trajetória simples de ponto a ponto para cada um dos eixos X, Y e Z do robô, dentro do volume de trabalho mostrado na Figura 50, em relação ao sistema de referência destacado. Figura 50 - Representação do volume de trabalho do robô. Fez-se também uma trajetória do sinal de acionamento da válvula on/off, para que nos pontos determinados ela possa acionar automaticamente a geradora de vácuo e assim pegar a peça. A trajetória foi pensada da seguinte forma: o efetuador final inicia em um determinado ponto e se estabiliza. Em seguida é feito um avanço em X, na vertical, para chegar até a peça. No final deste posicionamento a geradora de vácuo é então ativada e a ventosa pega a peça, logo o efetuador volta ao ponto inicial. Ele se desloca em Y e em seguida em Z, chegando ao local desejado onde o efetuador avança novamente em X. Após um tempo para estabilizar a posição, a geradora de vácuo é então desativada e a peça é solta na posição final. Por fim, o efetuador volta para sua posição inicial em X, em seguida em Y e depois em Z, completando o ciclo.
64 64 Na Tabela 4 estão os pontos de X, Y e Z utilizados para a programação desta tarefa no espaço de trabalho, bem como o sinal da válvula on/off. Tabela 4 - Programação da trajetória. Tempo (s) X (m) Y (m) Z (m) On/off (V) 0-0,16 0,35 0, ,16 0,35 0, ,27 0,35 0, ,27 0,35 0, ,16 0,35 0, ,16 0,83 0, ,16 0,83 0, ,21 0,83 0, ,21 0,83 0, ,16 0,83 0, ,16 0,35 0, ,16 0,35 0,6 0 Na Figura 51 tem-se um esquema da trajetória do efetuador final dentro do espaço de trabalho do robô que foi definido anteriormente. O ponto vermelho indica a posição inicial, ou seja, o ponto de partida do efetuador final, sob o qual está a representação da peça a ser manuseada. Esta peça por sua vez será deslocada até a posição final no sentido indicado.

65 65 Figura 51 - Esboço da trajetória planejada no espaço de tarefa do robô. 5.3 Testes e resultados A trajetória foi enfim implementada no sistema de controle para a obtenção dos resultados a partir dos testes realizados, como mostra a Figura 52. Figura 52 - Realização dos testes. Para a análise dos mesmos, serão levadas em conta as trajetórias realizadas, os erros nos eixos e o erro no espaço de tarefa. Os dados foram capturados durante

66 66 a realização de dois ciclos com pressão de suprimento regulada em 7 bar, a partir do layout criado no ControlDesk, conforme a Figura 53. Figura 53 - Layout criado para a captura dos dados. Na Tabela 5 abaixo estão os valores dos ganhos proporcional e integral para cada um dos eixos, bem como os parâmetros utilizados para a compensação da zona morta das servoválvulas durante o teste. Tabela 5 - Parâmetros do controlador. Eixo Kp Ki Zme Zmd X N/A N/A Y 40 1,5-0,84 0,84 Z 90 13,5-0,88 0,88 Começando pelo eixo Z, da correspondente variável de junta d 1, os resultados obtidos para a trajetória realizada estão expressos na Figura 54. Nela pode-se observar o comportamento do efetuador final em relação a trajetória programada no eixo Z.
67 67 Figura 54 - Trajetória no eixo Z. 0.9 desejado realizado d1 (m) Tempo (s) Na Figura 55 tem-se o gráfico do erro de posição do efetuador no eixo Z. Como pode ser visto no gráfico anterior, o erro de posicionamento é maior no início do trecho de posicionamento, onde ele chaga a aproximadamente 2 cm e depois decresce até o final do posicionamento chegando a aproximadamente 2,5 mm, nos momentos em que a geradora de vácuo é ativada. Figura 55 - Erro de posição no eixo Z Erro no eixo Z (m) Tempo (s)
68 68 Com relação ao eixo Y, cuja variável de junta é o d 2, os resultados obtidos quanto à realização da trajetória, podem ser vistos no gráfico da Figura 56. Nela pode-se perceber um bom segmento de trajetória, no entanto tem-se certa oscilação no momento do posicionamento. Figura 56 - Trajetória no eixo Y. 0.9 desejado realizado d2 (m) Tempo (s) No gráfico do erro da Figura 57 pode-se notar que ao contrário do eixo Z, os maiores erros no eixo Y se deram no início do movimento, ou seja, na saída da inércia. Nestes pontos, o erro chegou a aproximados 4,3 cm. Quanto aos trechos de posicionamento do efetuador final, o comportamento foi diferente de acordo com a posição desejada. No ponto mais próximo, o erro foi mais constante sendo assim, mais parecido com o que se viu durante a determinação dos ganhos. Já no ponto mais afastado comportamento foi diferente, o erro oscilou um pouco mais. No entanto, nos pontos em que a peça foi pega ou solta, o erro de posição chegou a no máximo 1 mm.
69 69 Figura 57 - Erro de posição do eixo Y Erro no eixo Y (m) Em relação ao eixo X, que corresponde a variável de junta d 3, os resultados em relação à trajetória estão na Figura 58. O segmento da trajetória, como pode-se observar foi tão bom em relação aos casos anteriores. Isso pode ser causado por dois motivos principais, como a falta de compensação de zona morta e o menor diâmetro do atuador Tempo (s) Figura 58 - Trajetória no eixo X desejado realizado 0.24 d3 (m) Tempo (s)
70 70 No gráfico do erro, na Figura 59, pode-se notar que a pesar do segmento de trajetória não ter sido bom, o erro máximo não foi tão elevado. Mais do que isso, o erro de posicionamento para os tempos em que a geradora foi ativada oscilou, mas ficou em cerca de 1 mm. Figura 59 - Erro de posição no eixo X Erro no eixo X (m) Tempo (s) No gráfico da Figura 60 tem-se o erro no espaço de tarefa durante a realização da trajetória, calculado a partir da equação (16). Erro = (ErroX) 2 + (ErroY) 2 + (ErroZ) 2 16 No mesmo gráfico estão indicados pelas linhas vermelhas os momentos em que o efetuador foi ativado e desativado durante a realização dos dois ciclos.
71 71 Figura 60 - Erro no espaço de tarefa Erro total (m) Na Tabela 6 têm-se os erros considerando os três eixos nos momentos em que se pegou ou largou a peça Tempo (s) Tabela 6 - Erros de posicionamento no espaço. Tempo (s) Erro (m) 6,4 0, ,4 0, ,4 0, ,4 0, Nas posições onde a válvula on/off foi ativada acionando a geradora de vácuo e pegando a peça, o erro total ficou em torno de 2,67 mm. Na Figura 61 pode-se observar a trajetória desejada (vermelho) e a realizada (azul), representadas dentro do espaço de tarefas do robô durante os dois ciclos.
72 72 Figura 61 - Trajetória desejada e trajetória realizada durante o teste Eixo X Eixo Z Eixo Y Análise dos resultados A partir dos testes realizados pode-se analisar o comportamento de cada um dos eixos de forma individual e também do efetuador final em si. Quanto ao seguimento de trajetória, os eixos Y e Z tiveram melhores resultados em relação ao eixo X. No entanto, como era esperado, os seguimentos apresentam falhas ligadas ao tipo do controlador utilizado e também devido ao atrito. Em relação ao posicionamento, apesar do eixo Y ter apresentado um comportamento oscilatório em um dos mesmos, nos pontos em que a geradora de vácuo foi ativada ele obteve os melhores resultados. Seu erro máximo para os pontos citados foi de 1 mm. Já no eixo Z, os erros ficaram em torno de 2,5 mm e em X em cerca de 1 mm também. Considerando os três eixos, o erro total ficou em torno de 2,67 mm. Isso se deve ao planejamento da trajetória onde foi deixado certo tempo para que a posição fosse corrigida pelo controlador. Dessa forma, pode-se dizer que o robô apresentou uma exatidão considerável e, no entanto, uma repetitividade não tão boa. Mas no que diz respeito a realização de tarefas do tipo pick-and-place e na manipulação em geral que não requerem uma grande acurácia, o robô Gantry de acionamento pneumático mostrou um desempenho satisfatório.
73 73 CONCLUSÃO Este trabalho de conclusão de curso tratou da adaptação e implementação de controle em um robô do tipo Gantry de acionamento pneumático. Ele foi modificado visando a realização de tarefas do tipo pick-and-place. Inicialmente mostrou-se um contexto geral de robótica e robótica industrial e em seguida foi feita uma descrição do robô utilizado, mostrando como ele era antes do início do trabalho. Em seguida foram mostradas as melhorias feitas a partir dos pontos citados em outros estudos. Foram feitas melhorias no sistema de acionamento com a substituição do cilindro sem haste por um de diâmetro maior. Para isso, fez-se o projeto e construção das peças para tal adaptação. Outra modificação quanto ao sistema de acionamento foi a mudança na posição das válvulas, que foram montadas mais próximas aos seus respectivos atuadores. Como a proposta de aplicação do robô foi na manipulação de peças, foi desenvolvido e construído um efetuador final que permitisse a execução de tal tipo de tarefa. Quanto ao sistema de controle, foi determinado e implementado o modelo cinemático do robô no mesmo. Assim, passou-se a trabalhar no espaço de trabalho e não mais no espaço do atuador. Os testes começaram com a determinação dos ganhos para o controlador do sistema do atuador alterado, onde pode-se observar uma melhora quanto ao erro de posicionamento em relação ao cilindro de menor diâmetro. Na sequência fez-se a criação e implementação da trajetória desejada. Com os resultados obtidos pode-se perceber que o desempenho do robô na manipulação de peças nos casos em que uma grande acurácia não é requerida foi satisfatório. A partir disso, algumas melhorias são podem ser sugeridas para um melhor desempenho do robô. Em primeiro lugar deve-se fazer a determinação da zona morta de cada uma das servoválvulas. Já que se tem apenas um parâmetro que é utilizado para as duas primeiras, sendo que a última não possui compensação. Outra melhoria sugerida seria a inclusão da dinâmica do atrito ao controlador, pois ficou visível ação do mesmo durante a realização da trajetória desejada. Pode-se também implementar um controlador mais complexo, visando um melhor seguimento de trajetória, como um controlador (PID).
74 74 REFERÊNCIAS BIBLIOGRÁFICAS ASFAHL, C. Ray. Robots and manufacturing automation. 2. Ed. New York: John Wiley & Sons, BACK, N.; OGLIARI, A.; DIAS, A.; SILVA, J. C. Projeto integrado de produtos: planejamento, concepção e modelagem. Barueri: Manole, BAVARESCO, Delair. Modelagem matemática e controle de um atuador pneumático f. Dissertação (Mestrado em Modelagem Matemática) Universidade Regional do Noroeste do Estado do Rio Grande do Sul, Ijuí, BOLLMANN, A. Fundamentos da Automação Industrial e Pneutrônica, projetos de comandos binários eletropneumáticos. ABHP, São Paulo,1996. CARLOTTO, L. Controle de um Robô Pneumático em Aplicações de Segmento de Trajetórias Retilíneas no Espaço de tarefa. Trabalho de conclusão de curso (Engenharia Mecânica). Panambi: UNIJUÍ, ENDLER, Luciano. Modelagem da vazão mássica de uma servoválvula pneumática e sua aplicação no controle ótimo de um servoposicionador pneumático. Ijuí: UNIJUÍ, Dissertação (Mestrado em Modelagem Matemática). Ijuí: UNIJUÍ, FESTO. Catálogo de produtos online. Disponível em: < Acesso em: 20 de maio de GUENTHER, R.; PERONDI, E. C.; DEPIERI, E. R.; VALDIERO, A. C. Cascade Controlled Pneumatic Positioning System with LuGre Model Based Friction
75 75 Compensation, Jornal of the Braz. Soc. of Mech. Sci. & Eng., Vol. 28, No. 1, January-March 2006, pp IFR- International Federation of Robotics. Disponível em: Acesso em: 20 de maio de ISO 10218, Manipulating Industrial Robots Safety, ISO Publications, França, LOPES, Cristiano Rafael. Automação do processo de rebarbamento de peças utilizando um robô pneumático. Passo Fundo: UPF, Dissertação. Universidade de Passo Fundo LUFT, Cláudia Cristiane Schmeing. Projeto de desenvolvimento e melhorias da estrutura de um manipulador robótico para acabamento de painéis metálicos. Trabalho de conclusão de curso (Engenharia Mecânica). Panambi: UNIJUÍ, MARASCHIN, Leonardo. Modelagem matemática de um robô Gantry com acionamento pneumático. Panambi: UNIJUÍ, Dissertação. Universidade Regional do Noroeste do Estado do Rio Grande do Sul NOF, Shimon Y. (Ed.). Handbook of industrial robotics. 2.ed. New York: John Wiley & Sons, PARKER. Catálogo do cilindro hidráulico série 3L. Cachoeirinha, Brasil. Parker Hannifin Ind. Com. Ltda., ROMANO, V. F. Robótica Industrial: aplicações na indústria de manufatura e de processos. São Paulo: Edgard Blucher, ROSÁRIO, João Maurício. Princípios de mecatrônica. São Paulo: Pearson Prentice Hall, 2005.
76 76 SCHMIDT, Edomir Marciano. Desenvolvimento do protótipo de um dispositivo automático para o auxílio no processo de acabamento de painéis. Trabalho de conclusão de curso (Engenharia Mecânica). Panambi: UNIJUÍ, SCHNEIDER, Claudiomiro. Desenvolvimento e construção do protótipo de um manipulador robótico para acabamento de painéis. Trabalho de conclusão de curso (Engenharia Mecânica). Panambi: UNIJUÍ, SICILIANO, B.; SCIAVICCO, L.; VILLANI, L.; ORIOLO, G. Robotics: Modelling, Planning and Control. 3. ed. Springer, VALDIERO, Antonio Carlos. Inovação e desenvolvimento do projeto de produtos industriais. Ijuí: Unijuí, VALDIERO, Antonio Carlos. Projeto mecânico de robôs industriais. Ijuí: Unijuí, VALDIERO, Antonio Carlos. Modelagem matemática de robôs hidráulicos. Ijuí: Unijuí, WEG. Catálogo de produtos online. Disponível em: < Acesso em: 20 de maio de 2016.
77 APÊNDICE A DETALHAMENTO DA PEÇA (1) 77
78 78
79 APÊNDICE B DETALHAMENTO DA PEÇA (2) 79
80 80
81 APÊNDICE C DETALHAMENTO DA PEÇA (3) 81
82 82
83 APÊNDICE D DETALHAMENTO DA ESTRUTURA DO EFETUADOR 83
84 84
85 APÊNDICE E VISTA EXPLODIDA DO EFETUADOR FINAL 85
86 86
87 ANEXO A MÁXIMAS CARGAS E MOMENTOS PERMITIDOS 87
88 88
REPROJETO DE UM ROBÔ DO TIPO GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 REPROJETO DE UM ROBÔ DO TIPO GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Cristiano Rafael Lopes 3, Leonardo Bortolon Maraschin 4, Luiz Antonio Rasia 5, Antonio Carlos Valdiero 6. 1 Projeto
REPROJETO DE UM ROBÔ DO TIPO GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Cristiano Rafael Lopes 3, Leonardo Bortolon Maraschin 4, Luiz Antonio Rasia 5, Antonio Carlos Valdiero 6. 1 Projeto
DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Ivan Junior Mantovani 3, Felipe Oliveira Bueno 4, Antonio Carlos Valdiero 5.
DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Ivan Junior Mantovani 3, Felipe Oliveira Bueno 4, Antonio Carlos Valdiero 5.
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1
 MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
MODELAGEM CINEMÁTICA DE UM ROBÔ ANTROPOMÓRFICO COM DOIS GRAUS DE LIBERDADE 1 Vânia Luisa Behnen 2, Roberta Goergen 3, Marcia Regina Maboni Hoppen Porsch 4, Mônica Raquel Alves 5, Antonio Carlos Valdiero
DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1
 DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1 Felipe Ricardo Engelmann 2, Valdomiro Petry 3, Antonio Carlos Valdiero 4, Luiz Antônio Rasia 5. 1 Resultados
DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1 Felipe Ricardo Engelmann 2, Valdomiro Petry 3, Antonio Carlos Valdiero 4, Luiz Antônio Rasia 5. 1 Resultados
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
ESTUDO E PROJETO DE UM ROBÔ ACIONADO PNEUMATICAMENTE PARA APLICAÇÃO INDUSTRIAL 1
 ESTUDO E PROJETO DE UM ROBÔ ACIONADO PNEUMATICAMENTE PARA APLICAÇÃO INDUSTRIAL 1 Djonatan Ritter 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Ismael Barbieri Garlet 5, Cláudio Da Silva Dos Santos
ESTUDO E PROJETO DE UM ROBÔ ACIONADO PNEUMATICAMENTE PARA APLICAÇÃO INDUSTRIAL 1 Djonatan Ritter 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Ismael Barbieri Garlet 5, Cláudio Da Silva Dos Santos
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Leonardo Bortolon Maraschin 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional
DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Leonardo Bortolon Maraschin 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional
Acadêmica do Curso de Engenharia Mecânica, Bolsista de Iniciação Científica PROBIC/FAPERGS, 3
 IDENTIFICAÇÃO EXPERIMENTAL DOS PARÂMETROS DE ATRITO EM ATUADORES PNEUMÁTICOS DE UMA BANCADA PARA TESTES DE CONTROLE DE FORÇA 1 EXPERIMENTAL IDENTIFICATION OF THE FRICTION PARAMETERS IN PNEUMATIC ACTUATORS
IDENTIFICAÇÃO EXPERIMENTAL DOS PARÂMETROS DE ATRITO EM ATUADORES PNEUMÁTICOS DE UMA BANCADA PARA TESTES DE CONTROLE DE FORÇA 1 EXPERIMENTAL IDENTIFICATION OF THE FRICTION PARAMETERS IN PNEUMATIC ACTUATORS
Unidade 1 Introdução. 1.1 Robôs industriais
 Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Unidade 1 Introdução O escritor checo Karel Čapek introduziu a palavra "Robô" em sua peça "R.U.R" (Rossuum's Universal Robots) en 1921. O termo "Robô" vem da palavra checa "robota", que significa "trabalho
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
DESENVOLVIMENTO DO PROTÓTIPO DE UM BRAÇO ROBÓTICO DE JUNTAS ROTATIVA-ELÉTRICA E PRISMÁTICA-PNEUMÁTICA 1
 DESENVOLVIMENTO DO PROTÓTIPO DE UM BRAÇO ROBÓTICO DE JUNTAS ROTATIVA-ELÉTRICA E PRISMÁTICA-PNEUMÁTICA 1 Felipe Oliveira Bueno 2, Andrei Fiegenbaum 3, Ivan Junior Mantovani 4, Antonio Carlos Valdiero 5,
DESENVOLVIMENTO DO PROTÓTIPO DE UM BRAÇO ROBÓTICO DE JUNTAS ROTATIVA-ELÉTRICA E PRISMÁTICA-PNEUMÁTICA 1 Felipe Oliveira Bueno 2, Andrei Fiegenbaum 3, Ivan Junior Mantovani 4, Antonio Carlos Valdiero 5,
PROJETO ASSISTIDO POR COMPUTADOR DE UM MANIPULADOR ROBÓTICO ACIONADO POR ATUADORES PNEUMÁTICOS 1
 PROJETO ASSISTIDO POR COMPUTADOR DE UM MANIPULADOR ROBÓTICO ACIONADO POR ATUADORES PNEUMÁTICOS 1 Pedro Felipe Sartori Da Rosa 2, Ismael Barbieri Garlet 3, Djonatan Ritter 4, Angelo Fernando Fiori 5, Antonio
PROJETO ASSISTIDO POR COMPUTADOR DE UM MANIPULADOR ROBÓTICO ACIONADO POR ATUADORES PNEUMÁTICOS 1 Pedro Felipe Sartori Da Rosa 2, Ismael Barbieri Garlet 3, Djonatan Ritter 4, Angelo Fernando Fiori 5, Antonio
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Grande precisão (posicionamento do atuador final); Carga inercial (momento) fixa, ao longo da área de trabalho;
; Carga inercial (momento) fixa, ao longo da área de trabalho;") Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Tipos de robôs As diversas partes que compõem um manipulador industrial (robô) e que forma estudas até aqui - partes mecânicas, atuadores, sensores - podem ser montadas de diversas formas produzindo diferentes
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A.
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica A 1 Introdução Introdução Prof. Walter Fetter Lages 20 de março
ESTUDO DE UMA BANCADA PARA ENSAIO DE PÓRTICOS 1
 ESTUDO DE UMA BANCADA PARA ENSAIO DE PÓRTICOS 1 Liara Balbé Helgueira 2, Sandra Edinara Viecelli 3, Antonio Carlos Valdiero 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional desenvolvida no Núcleo de
ESTUDO DE UMA BANCADA PARA ENSAIO DE PÓRTICOS 1 Liara Balbé Helgueira 2, Sandra Edinara Viecelli 3, Antonio Carlos Valdiero 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional desenvolvida no Núcleo de
Palavras-Chave: Controle de posição; Servoposicionador pneumático linear.
 APLICAÇÃO DA MODELAGEM MATEMÁTICA NA SIMULAÇÃO DO CONTROLE PROPORCIONAL DE UM ATUADOR PNEUMÁTICO1 Rozimerli Raquel Milbeier Richter 2, Camila Valandro Zamberlan 3, Antonio Carlos Valdiero 4. 1 Pesquisa
APLICAÇÃO DA MODELAGEM MATEMÁTICA NA SIMULAÇÃO DO CONTROLE PROPORCIONAL DE UM ATUADOR PNEUMÁTICO1 Rozimerli Raquel Milbeier Richter 2, Camila Valandro Zamberlan 3, Antonio Carlos Valdiero 4. 1 Pesquisa
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
Disciplina: Robótica Aula 02: Conceitos Básicos
 Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Disciplina: Robótica Aula 02: Conceitos Básicos Bibliografia Básica 1) Livro: Princípios de Mecatrônica João Maurício Rosário, Prentice Hall Disponível na: Biblioteca UMC Biblioteca Virtual Agenda 1) Conceitos
Até 0.003 mm (0.1mm usualmente) Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40
 Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40") Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
ROBÓTICA (ROB74) AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug
 AULA 1. INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug") ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle:
ROBÓTICA (ROB74) AULA 1 INTRODUÇÃO A ROBÓTICA PROF.: Michael Klug PROGRAMA Introdução a Robótica: Origens Componentes Aplicações Classificação Cinemática: Direta, Inversa, Diferencial (Jacobiano) Controle:
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Estrutura e características gerais dos robôs. - Configuração básica de um robô - Articulações - Movimento e precisão
 Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
Estrutura e características gerais dos robôs - Configuração básica de um robô - Articulações - Movimento e precisão Braço robótico industrial Anatomia dos braços mecânicos industriais O braço robótico
1 ESCOLA POLITÉCNICA DA USP Aspectos Gerais Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
elcabral@usp.br 1 PMR2560 Robótica Aspectos Gerais Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Quando utilizar robôs? Dados estatísticos; Conceitos gerais; Componentes de um robô manipulador
DESENVOLVIMENTO DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO
 DESENVOLVIMENTO DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO Leonardo Bortolon Maraschin, leonardo.maraschin@unijui.edu.br 1 Angelo Fernando Fiori, an@unochapeco.edu.br 1 Antonio Carlos Valdiero, valdiero@unijui.edu.br
DESENVOLVIMENTO DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO Leonardo Bortolon Maraschin, leonardo.maraschin@unijui.edu.br 1 Angelo Fernando Fiori, an@unochapeco.edu.br 1 Antonio Carlos Valdiero, valdiero@unijui.edu.br
Introdução. Walter Fetter Lages
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica A Copyright (c)
PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA AUTOMATIZADA PARA ALIMENTAÇÃO DE PEÇAS 1
 PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA AUTOMATIZADA PARA ALIMENTAÇÃO DE PEÇAS 1 Giovani Prates Bisso Dambroz 2, Ivan Junior Mantovani 3, Andrei Fiegenbaum 4, João Paulo Weselovski Da Silva 5,
PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA AUTOMATIZADA PARA ALIMENTAÇÃO DE PEÇAS 1 Giovani Prates Bisso Dambroz 2, Ivan Junior Mantovani 3, Andrei Fiegenbaum 4, João Paulo Weselovski Da Silva 5,
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Conceitos e Tecnologias da Robótica Industrial
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ. DCEEng - Departamento de Ciências Exatas e Engenharias
 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi FELIPE OLIVEIRA BUENO DESENVOLVIMENTO
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi FELIPE OLIVEIRA BUENO DESENVOLVIMENTO
Walter Fetter Lages. Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
DESENVOLVIMENTO DE UM ROBÔ PNEUMÁTICO PARA ESTUFAS AGRÍCOLAS 1 DEVELOPMENT OF A PNEUMATIC ROBOT FOR GREENHOUSES
 DESENVOLVIMENTO DE UM ROBÔ PNEUMÁTICO PARA ESTUFAS AGRÍCOLAS 1 DEVELOPMENT OF A PNEUMATIC ROBOT FOR GREENHOUSES Felipe Oliveira Bueno 2, Ben-Hur Ribas Maciel 3, Giovani Prates Bisso Dambroz 4, Edmilton
DESENVOLVIMENTO DE UM ROBÔ PNEUMÁTICO PARA ESTUFAS AGRÍCOLAS 1 DEVELOPMENT OF A PNEUMATIC ROBOT FOR GREENHOUSES Felipe Oliveira Bueno 2, Ben-Hur Ribas Maciel 3, Giovani Prates Bisso Dambroz 4, Edmilton
SISTEMA FLEXÍVEL DE TREINAMENTO EM LINHAS DE PRODUÇÃO AUTOMATIZADAS (8 ESTAÇÕES)
") SISTEMA FLEXÍVEL DE TREINAMENTO EM LINHAS DE PRODUÇÃO AUTOMATIZADAS (8 ESTAÇÕES) MODELO: EE0034 DESCRIÇÃO: Este dispositivo é constituído por múltiplas estações de trabalho que podem ser utilizadas de
SISTEMA FLEXÍVEL DE TREINAMENTO EM LINHAS DE PRODUÇÃO AUTOMATIZADAS (8 ESTAÇÕES) MODELO: EE0034 DESCRIÇÃO: Este dispositivo é constituído por múltiplas estações de trabalho que podem ser utilizadas de
Fundamentos de Automação. Atuadores e Elementos Finais de Controle
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Manufatura assistida por computador
 Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
Manufatura assistida por computador Cinemática Direta em Manipuladores Robóticos Professor: Mário Luiz Tronco Aluno Doutorado: Luciano Cássio Lulio Engenharia Mecânica Orientação e sistemas de referência
LISTA DE EXERCÍCIOS 01
 LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
LISTA DE EXERCÍCIOS 01 Anatomia dos Braços Mecânicos Industriais Configuraçãodos robôs Um braço mecânico é formado pelabase,braço epunho. Obraço e ligado abase e esta e fixada ao chão (parede). Obraço
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
1 Introdução. 1.1 Tecnologia Kopelrot
 1 Introdução O presente trabalho trata do projeto, construção e teste preliminar de um novo compressor rotativo, com a tecnologia Kopelrot. A tecnologia Kopelrot diz respeito à máquina de deslocamento
1 Introdução O presente trabalho trata do projeto, construção e teste preliminar de um novo compressor rotativo, com a tecnologia Kopelrot. A tecnologia Kopelrot diz respeito à máquina de deslocamento
REGULADOR COMPACTO PARA TURBINAS HIDRÁULICAS VOITH HYDRO
 GGH / 05 17 a 22 de Outubro de 1999 Foz do Iguaçu Paraná - Brasil GRUPO I GRUPO DE ESTUDO DE GERAÇÃO HIDRÁULICA (GGH) REGULADOR COMPACTO PARA TURBINAS HIDRÁULICAS José Cláudio Mazzoleni* Jorge Izukawa
GGH / 05 17 a 22 de Outubro de 1999 Foz do Iguaçu Paraná - Brasil GRUPO I GRUPO DE ESTUDO DE GERAÇÃO HIDRÁULICA (GGH) REGULADOR COMPACTO PARA TURBINAS HIDRÁULICAS José Cláudio Mazzoleni* Jorge Izukawa
1 RESUMO. Palavras-chave: Controle, encoders, motor CC. 2 INTRODUÇÃO
 1 RESUMO Na sociedade moderna se tornou cada vez mais presente e necessário meios de controlar dispositivos levando em consideração precisões maiores e perdas menores. Em diversos cenários o controle de
1 RESUMO Na sociedade moderna se tornou cada vez mais presente e necessário meios de controlar dispositivos levando em consideração precisões maiores e perdas menores. Em diversos cenários o controle de
Paulo Roberto Chiarolanza Vilela 1
 Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
Paulo Roberto Chiarolanza Vilela 1 AULA 03 Classificação de Robôs 2 Juntas Robóticas Tipos de Juntas Graus de Liberdade Classificação Exercício para entregar 3 Os eixos da base do corpo permitem mover
8 Braço Mecânico. 8.1 Manipulador FEROS I
 Desenvolvimento de um Sistema Aberto para Ensino de Robôs Manipuladores 116 8 Braço Mecânico 8.1 Manipulador FEROS I O manipulador FEROS I foi desenvolvido com a finalidade de ser um primeiro protótipo
Desenvolvimento de um Sistema Aberto para Ensino de Robôs Manipuladores 116 8 Braço Mecânico 8.1 Manipulador FEROS I O manipulador FEROS I foi desenvolvido com a finalidade de ser um primeiro protótipo
Eduardo L. L. Cabral
 elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
elcabral@usp.br 1 PMR2560 Robótica Cadeia Cinemática Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Cadeia cinemática: Graus de liberdade; Exemplos de robôs com cadeias seriada e fechada.
Robótica Industrial. Professor: José Alberto Naves Cocota Júnior. UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30
 Turmas: EE8P30 e EE9P30") Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Modelagem Matemática e Validação Experimental de um Atuador Pneumático para uma Bancada de Ensaios de Estruturas¹ 1
 1 Modelagem Matemática e Validação Experimental de um Atuador Pneumático para uma Bancada de Ensaios de Estruturas¹ 1 Resumo O presente trabalho trata da validação experimental de um modelo matemático
1 Modelagem Matemática e Validação Experimental de um Atuador Pneumático para uma Bancada de Ensaios de Estruturas¹ 1 Resumo O presente trabalho trata da validação experimental de um modelo matemático
Sistemas para Automação e Robótica (parte 02)
") Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
Sistemas para Automação e Robótica (parte 02) Anatomia dos Braços Mecânicos Industriais Configuração dos robôs Um braço mecânico é formado pela base, braço e punho. O braço (elo) e ligado a base e esta
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA
 CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
1. Introdução. 1.1.Objetivo
 1. Introdução 1.1.Objetivo O objetivo desta dissertação é desenvolver um sistema de controle por aprendizado acelerado e Neuro-Fuzzy baseado em técnicas de inteligência computacional para sistemas servo-hidráulicos
1. Introdução 1.1.Objetivo O objetivo desta dissertação é desenvolver um sistema de controle por aprendizado acelerado e Neuro-Fuzzy baseado em técnicas de inteligência computacional para sistemas servo-hidráulicos
1 ESCOLA POLITÉCNICA DA USP Estrutura Mecânica Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
elcabral@usp.br 1 PMR2560 Robótica Estrutura Mecânica Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos - ligamentos: Características; Materiais utilizados; Balanceamento: Estático (contra-peso,
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
ATUADORES E VÁLVULAS
 ATUADORES E VÁLVULAS ATUADORES Esses mecanismos são denominados atuadores, pois sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Os
ATUADORES E VÁLVULAS ATUADORES Esses mecanismos são denominados atuadores, pois sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Os
Sistemas para Automação e
 Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
COMPONENTES DE UM SISTEMA ROBÓTICO
 COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
Evento: XXV SEMINÁRIO DE INICIAÇÃO CIENTÍFICA
 DESENVOLVIMENTO E CONSTRUÇÃO DE UM MÓDULO DIDÁTICO DE AUTOMAÇÃO PNEUMÁTICA PARA CÉLULA DE MANUFATURA 1 DEVELOPMENT AND CONSTRUCTION OF A DIDACTIC AUTOMATION MODULE FOR MANUFACTURE CELL Odmartan Ribas Maciel
DESENVOLVIMENTO E CONSTRUÇÃO DE UM MÓDULO DIDÁTICO DE AUTOMAÇÃO PNEUMÁTICA PARA CÉLULA DE MANUFATURA 1 DEVELOPMENT AND CONSTRUCTION OF A DIDACTIC AUTOMATION MODULE FOR MANUFACTURE CELL Odmartan Ribas Maciel
Classificação. Classificação. Classificação. Classificação. Classificação. Introdução à Robótica Manipuladores e Robótica Móvel (classificação)
") Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
ROBÓTICA DENAVIT- HARTENBERG. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial DENAVIT- HARTENBERG https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
Cálculo da força de cilindro pneumático
 Cálculo da força de cilindro pneumático Cálculo da força de um cilindro pneumático, os fatores levados em consideração e as fórmulas utilizadas para realização destes cálculos. Serviço Nacional de Aprendizagem
Cálculo da força de cilindro pneumático Cálculo da força de um cilindro pneumático, os fatores levados em consideração e as fórmulas utilizadas para realização destes cálculos. Serviço Nacional de Aprendizagem
MECATRÔNICA COMO OBJETO DE INTERAÇÃO ENTRE O CURSO DE ENGENHARIA MECÂNICA E O MESTRADO/DOUTORADO EM MODELAGEM MATEMÁTICA 1
 MECATRÔNICA COMO OBJETO DE INTERAÇÃO ENTRE O CURSO DE ENGENHARIA MECÂNICA E O MESTRADO/DOUTORADO EM MODELAGEM MATEMÁTICA 1 Mônica Raquel Alves 2, Djonathan Ritter 3, Vânia Luisa Behnen 4, Roberta Goergen
MECATRÔNICA COMO OBJETO DE INTERAÇÃO ENTRE O CURSO DE ENGENHARIA MECÂNICA E O MESTRADO/DOUTORADO EM MODELAGEM MATEMÁTICA 1 Mônica Raquel Alves 2, Djonathan Ritter 3, Vânia Luisa Behnen 4, Roberta Goergen
Elementos de Robótica
 Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Elementos de Robótica Prof. José Alberto Naves Cocota Júnior UFOP Escola de Minas Engenharia de Controle e Automação Engenharia Mecânica Introdução Nesta disciplina serão tratados o conceitos básicos de
Controle de Robôs Manipuladores. Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
") Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
MOVIMENTO E DINAMISMO
 SOBRE O GRUPO REDUTEP ACIONAMENTOS REDUTEP INTEGRADORA MOVIMENTO E DINAMISMO www.redutep.com.br O GRUPO Redutep Soluções Industriais A divisão Acionamentos oferece os mais variados produtos e acessórios
SOBRE O GRUPO REDUTEP ACIONAMENTOS REDUTEP INTEGRADORA MOVIMENTO E DINAMISMO www.redutep.com.br O GRUPO Redutep Soluções Industriais A divisão Acionamentos oferece os mais variados produtos e acessórios
Industria de Equipamentos Pneumáticos LINHA DE PRODUTOS
 Industria de Equipamentos Pneumáticos LINHA DE PRODUTOS LINHA DE PRODUTOS Cilindros ISO Série NCWE e CWU Fornecidos nos diâmetros de 32, 40, 50, 63, 80, 100, 125, 160, 200, 250 e 320, de acordo com as
Industria de Equipamentos Pneumáticos LINHA DE PRODUTOS LINHA DE PRODUTOS Cilindros ISO Série NCWE e CWU Fornecidos nos diâmetros de 32, 40, 50, 63, 80, 100, 125, 160, 200, 250 e 320, de acordo com as
PROJETO EM SISTEMAS MECÂNICOS, MECATRÔNICA E ROBÓTICA 1. Everton Luís Jahnel 2, Luiz Antonio Rasia 3.
 PROJETO EM SISTEMAS MECÂNICOS, MECATRÔNICA E ROBÓTICA 1 Everton Luís Jahnel 2, Luiz Antonio Rasia 3. 1 Projeto de pesquisa e desenvolvimento realizado no curso de graduação em Engenharia Elétrica 2 Aluno
PROJETO EM SISTEMAS MECÂNICOS, MECATRÔNICA E ROBÓTICA 1 Everton Luís Jahnel 2, Luiz Antonio Rasia 3. 1 Projeto de pesquisa e desenvolvimento realizado no curso de graduação em Engenharia Elétrica 2 Aluno
DESENVOLVIMENTO DE MÓDULOS ROBÓTICOS DIDÁTICOS COM AUXÍLIO DE UM SISTEMA CAD/CAM 1
 DESENVOLVIMENTO DE MÓDULOS ROBÓTICOS DIDÁTICOS COM AUXÍLIO DE UM SISTEMA CAD/CAM 1 Odmartan Ribas Maciel 2, Ivan Junior Mantovani 3, João Paulo Weselovski Da Silva 4, Mônica Raquel Alves 5, Antonio Carlos
DESENVOLVIMENTO DE MÓDULOS ROBÓTICOS DIDÁTICOS COM AUXÍLIO DE UM SISTEMA CAD/CAM 1 Odmartan Ribas Maciel 2, Ivan Junior Mantovani 3, João Paulo Weselovski Da Silva 4, Mônica Raquel Alves 5, Antonio Carlos
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA. SUBÁREA: Engenharias
 TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
Introdução. Aula 1. Prof. Dr. Emílio Carlos Nelli Silva Prof. Dr. Rafael Traldi Moura
 Introdução Aula 1 Prof. Dr. Emílio Carlos Nelli Silva Prof. Dr. Rafael Traldi Moura Introdução Os elementos da automação industrial são: Sensores; Controladores (comando e regulação); Atuadores (acionamento).
Introdução Aula 1 Prof. Dr. Emílio Carlos Nelli Silva Prof. Dr. Rafael Traldi Moura Introdução Os elementos da automação industrial são: Sensores; Controladores (comando e regulação); Atuadores (acionamento).
Figura 4.1: a)elemento Sólido Tetraédrico Parabólico. b)elemento Sólido Tetraédrico Linear.
elemento Sólido Tetraédrico Parabólico. b)elemento Sólido Tetraédrico Linear.") 4 Método Numérico Foi utilizado o método dos elementos finitos como ferramenta de simulação com a finalidade de compreender e avaliar a resposta do tubo, elemento estrutural da bancada de teste utilizada
4 Método Numérico Foi utilizado o método dos elementos finitos como ferramenta de simulação com a finalidade de compreender e avaliar a resposta do tubo, elemento estrutural da bancada de teste utilizada
Análise da Dinâmica Não Linear de um Braço Robótico
 Trabalho apresentado no CNMAC, Gramado - RS, 2016. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics Análise da Dinâmica Não Linear de um Braço Robótico Antropomórfico
Trabalho apresentado no CNMAC, Gramado - RS, 2016. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics Análise da Dinâmica Não Linear de um Braço Robótico Antropomórfico
ESTUDO DA COMBUSTÃO DA OPERAÇÃO BICOMBUSTÍVEL DIESEL-ETANOL NUMA MÁQUINA DE COMPRESSÃO RÁPIDA
 ESTUDO DA COMBUSTÃO DA OPERAÇÃO BICOMBUSTÍVEL DIESEL-ETANOL NUMA MÁQUINA DE COMPRESSÃO RÁPIDA Aluno: Pedro Delbons Duarte de Oliveira Orientador: Carlos Valois Maciel Braga Introdução Em virtude da frequente
ESTUDO DA COMBUSTÃO DA OPERAÇÃO BICOMBUSTÍVEL DIESEL-ETANOL NUMA MÁQUINA DE COMPRESSÃO RÁPIDA Aluno: Pedro Delbons Duarte de Oliveira Orientador: Carlos Valois Maciel Braga Introdução Em virtude da frequente
DEFINIÇÃO DE ROBÔ INDUSTRIAL
 DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
DEFINIÇÃO DE ROBÔ INDUSTRIAL O termo robô deriva da palavra eslava robota, que significa trabalho forçado. Em 1921, o dramaturgo Karel Capek usou-a pela primeira vez, numa peça teatral, para referir-se
São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas.
 4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
4. Classificação dos robôs São apresentadas as seguintes configurações básicas para um manipulador de acordo com os movimentos realizados por suas juntas. 1 - Robô revoluto, antropomórfico ou articulado.
ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS RESUMO
 ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS Luiz F. A. RODRIGUES 1 ; Rodolfo F. BECKER 2 ; Heber R. MOREIRA 3 RESUMO Atualmente, a ciência está cada vez mais extinguindo
ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS Luiz F. A. RODRIGUES 1 ; Rodolfo F. BECKER 2 ; Heber R. MOREIRA 3 RESUMO Atualmente, a ciência está cada vez mais extinguindo
5 Concepção e Projeto da Bancada
 5 Concepção e Projeto da Bancada 5.1 Introdução O principal objetivo no projeto da bancada é simular o fenômeno da instabilidade em um rotor. O rotor foi desenvolvido a partir de um preexistente no Laboratório
5 Concepção e Projeto da Bancada 5.1 Introdução O principal objetivo no projeto da bancada é simular o fenômeno da instabilidade em um rotor. O rotor foi desenvolvido a partir de um preexistente no Laboratório
3 Equipamento de Cisalhamento Direto com Sucção Controlada da PUC-Rio
 3 Equipamento de Cisalhamento Direto com Sucção Controlada da PUC-Rio 3.1. Aspectos Históricos e Generalidades O estudo das características de resistência ao cisalhamento de solos não saturados tem sido
3 Equipamento de Cisalhamento Direto com Sucção Controlada da PUC-Rio 3.1. Aspectos Históricos e Generalidades O estudo das características de resistência ao cisalhamento de solos não saturados tem sido
MANIPULAÇÃO E EQUIPAMENTOS
 MANIPULAÇÃO E EQUIPAMENTOS 10 Garras angulares GW Tipo... Fluido... Curso (± 1 )... Temperatura... Modelos... Momento total (apertura)... Momento total (fechamento)... Tempo de fechamento... Freqüência
MANIPULAÇÃO E EQUIPAMENTOS 10 Garras angulares GW Tipo... Fluido... Curso (± 1 )... Temperatura... Modelos... Momento total (apertura)... Momento total (fechamento)... Tempo de fechamento... Freqüência
Classificação. Classificação. Classificação. Classificação. Classificação 03/23/2016
 Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
ATUADORES ROTATIVOS CAPÍTULO 1.3 INTRODUÇÃO PAG. 1.3/02 ATUADOR ROTATIVO, SÉRIE R1 PAG. 1.3/06 ATUADOR ROTATIVO, SÉRIE R2 PAG. 1.
 ATUADORES ROTATIVOS CAPÍTUO.3 INTRODUÇÃO PAG..3/0 ATUADOR ROTATIVO, SÉRIE R PAG..3/06 ATUADOR ROTATIVO, SÉRIE R PAG..3/09 ATUADOR ROTATIVO, SÉRIE R3 PAG..3/3 MESA GIRATÓRIA, SÉRIE R4 PAG..3/8.3/0 P N E
ATUADORES ROTATIVOS CAPÍTUO.3 INTRODUÇÃO PAG..3/0 ATUADOR ROTATIVO, SÉRIE R PAG..3/06 ATUADOR ROTATIVO, SÉRIE R PAG..3/09 ATUADOR ROTATIVO, SÉRIE R3 PAG..3/3 MESA GIRATÓRIA, SÉRIE R4 PAG..3/8.3/0 P N E
Dobradeira CNC Synchro Série PBH
 Dobradeira CNC Synchro Série PBH Acessórios Padrões Batentes do encosto traseiro Sistema de guias duplo Suportes frontais com guias lineares Sistema de fixação rápida das ferramentas Sistema de segurança
Dobradeira CNC Synchro Série PBH Acessórios Padrões Batentes do encosto traseiro Sistema de guias duplo Suportes frontais com guias lineares Sistema de fixação rápida das ferramentas Sistema de segurança
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS
 DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluna: Ingrid Moura Obeid Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
DESENVOLVIMENTO DE SIMULADORES DE MOVIMENTO PARA ANÁLISE E VISUALIZAÇÃO DA DINÂMICA DE VEÍCULOS Aluna: Ingrid Moura Obeid Orientador: Mauro Speranza Neto 1. Introdução O projeto baseia-se no desenvolvimento
AULA 9 ATUADORES ELÉTRICOS
 AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
Sistemas de ajuste de tensão e alinhamento de fitas. Tensão e precisão contínuas em toda a linha
 Sistemas de ajuste de tensão e alinhamento de fitas Tensão e precisão contínuas em toda a linha Tensão mecânica ideal e precisão no alinhamento As variações de temperatura, tensões mecânicas, contaminantes
Sistemas de ajuste de tensão e alinhamento de fitas Tensão e precisão contínuas em toda a linha Tensão mecânica ideal e precisão no alinhamento As variações de temperatura, tensões mecânicas, contaminantes
PNEUMÁTICA DEFINIÇÃO:
 DEFINIÇÃO: PNEUMÁTICA Pneumática: (do grego pneumos com o significado de respiração) pode ser entendida como sendo o conjunto de todas as aplicações que utilizam a energia armazenada e transmitida pelo
DEFINIÇÃO: PNEUMÁTICA Pneumática: (do grego pneumos com o significado de respiração) pode ser entendida como sendo o conjunto de todas as aplicações que utilizam a energia armazenada e transmitida pelo
sistema de marcação de bancada NetMarker
 sistema de marcação de bancada NetMarker NetMarker Um sistema de marcação de bancada compacto Inovador e com possibilidade de conexão a uma network o sistema de marcação CNC é um campeão quando o assunto
sistema de marcação de bancada NetMarker NetMarker Um sistema de marcação de bancada compacto Inovador e com possibilidade de conexão a uma network o sistema de marcação CNC é um campeão quando o assunto
ROBÓTICA CINEMÁTICA. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CINEMÁTICA https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br giovanatt@gmail.com
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INSTRUMENTAÇÃO MECATRÔNICA
 CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ. DCEEng - Departamento de Ciências Exatas e Engenharias
 0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
0 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DCEEng - Departamento de Ciências Exatas e Engenharias Curso de Engenharia Mecânica Campus Panambi JONATAN DE OLIVEIRA PROJETO
Faculdade SENAI Rio. Infraestrutura Graduação Tecnológica em Automação Industrial
 Faculdade SENAI Rio Infraestrutura Graduação Tecnológica em Automação Industrial Laboratório de Eletrônica Possui kits didáticos de Eletrônica Analógica e Digital e diversos equipamentos tais como: osciloscópios
Faculdade SENAI Rio Infraestrutura Graduação Tecnológica em Automação Industrial Laboratório de Eletrônica Possui kits didáticos de Eletrônica Analógica e Digital e diversos equipamentos tais como: osciloscópios
PROJETO E CONSTRUÇÃO DE UMA PROTEÇÃO DE UMA BANCADA DIDÁTICA PARA ENSAIO DE ESTRUTURAS 1
 PROJETO E CONSTRUÇÃO DE UMA PROTEÇÃO DE UMA BANCADA DIDÁTICA PARA ENSAIO DE ESTRUTURAS 1 Odmartan Ribas Maciel 2, Andrei Fiegenbaum 3, Ismael Barbieri Garlet 4, Henrique Ferrari 5, Antônio Carlos Valdiero
PROJETO E CONSTRUÇÃO DE UMA PROTEÇÃO DE UMA BANCADA DIDÁTICA PARA ENSAIO DE ESTRUTURAS 1 Odmartan Ribas Maciel 2, Andrei Fiegenbaum 3, Ismael Barbieri Garlet 4, Henrique Ferrari 5, Antônio Carlos Valdiero
MELHORIAS NO SUPORTE DE FIXAÇÃO DE UM SISTEMA DE CORTE À PLASMA EM UM ROBÔ PNEUMÁTICO TIPO GANTRY.
 XIV CONGRESSO NACIONAL DE ESTUDANTES DE ENGENHARIA MECÂNICA Universidade Federal de Uberlândia Faculdade de Engenharia Mecânica MELHORIAS NO SUPORTE DE FIXAÇÃO DE UM SISTEMA DE CORTE À PLASMA EM UM ROBÔ
XIV CONGRESSO NACIONAL DE ESTUDANTES DE ENGENHARIA MECÂNICA Universidade Federal de Uberlândia Faculdade de Engenharia Mecânica MELHORIAS NO SUPORTE DE FIXAÇÃO DE UM SISTEMA DE CORTE À PLASMA EM UM ROBÔ
1 ESCOLA POLITÉCNICA DA USP Introdução Eduardo L. L. Cabral ESCOLA POLITÉCNICA DA USP
 elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
elcabral@usp.br 1 PMR2560 Robótica Introdução Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos O que é a robótica? Robôs industriais Descrição da disciplina Vídeos elcabral@usp.br 3 De
Robótica - utilização, programação, modelagem e controle de robôs industriais
 Robótica - utilização, programação, modelagem e controle de robôs industriais SÉRIE DE EXERCÍCIOS 16 MODELAGEM CINEMÁTICA DE UM MANIPULADOR COM SEIS GRAUS DE LIBERDADE REVISÃO DE CONCEITOS A seguir são
Robótica - utilização, programação, modelagem e controle de robôs industriais SÉRIE DE EXERCÍCIOS 16 MODELAGEM CINEMÁTICA DE UM MANIPULADOR COM SEIS GRAUS DE LIBERDADE REVISÃO DE CONCEITOS A seguir são
ROBÓTICA CONCEITOS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CONCEITOS Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://giovanatangerino.wordpress.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CONCEITOS Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://giovanatangerino.wordpress.com