LABORATÓRIO DE SISTEMAS DINÂMICOS AULA 02
|
|
|
- Sebastião Campelo
- 4 Há anos
- Visualizações:
Transcrição
1 LABORATÓRIO DE SISTEMAS DINÂMICOS AULA 02 Larissa Driemeier Marcilio Alves 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 1
2 NOSSA AGENDA # Datas Tópico 1 02/03 09/03 Introdução ao modelamento e uso do software 2 16/03 23/03 Introdução à programação em MatLab 3 06/04 13/04 Resolução de Equações Diferenciais - Sistemas Lineares e Não Lineares 4 20/04 27/04 Projeto e Transformada de Laplace 5 04/05 11/05 Funções de Transferência 6 18/05 25/05 Diagrama de Blocos e Simulink (Entrega 1Trabalho) 7 08/06 15/06 Análise de Sistemas de Primeira Ordem (Entrega 2Trabalho) 8 22/06 29/06 Análise de Sistemas de Segunda Ordem 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 2
3 GRÁFICOS 2D %% Plot 2D x = -15:0.1:15; y = sin(x)./x; plot(x,y) figure(1); r = 50; L = 110; h = 40; th 80*(t+exp(-t)-1); y r*sin(th(t)) + sqrt(l^2-(r*cos(th(t))).^2) + h; f y(t) - 195; fplot(y,[0 2]) Anonimous functions figure(2) fplot(f,[0 2]) 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 3
4 x=-1:0.1:1; % Cria vetor 'x': valores entre 1 e -1 espacados de 0.1 y=x.^2; % Calcula y z=x.^3; % Calcula Z figure(9); plot(x,y,'r*',x,z,'b:') % Traca os dois graficos - x vs y e x vs z xlabel('valor de x') % Nomeia o eixo x ylabel('y e z') % Nomeia o eixo y title('graficos sobrepostos') % Atribui um titulo ao grafico legend('y','z') % legenda grid % Ativa as linhas de grade da janela figure(10) plot(x,y,'linewidth',1) % Traca x vs y hold on plot(x,z,'linewidth',2) % Traca x vs z no mesmo grafico hold off 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 4
5 SUBPLOT K = [1:100].^2; Y = K.^(-0.4); subplot(3,1,1); plot(k, Y); grid on subplot(3,1,2); semilogx(k, Y); grid on subplot(3,1,3); loglog(k, Y); grid on 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 5
6 COMO CUSTOMIZAR SEU GRÁFICO Tabela 11, pág e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 6
7 GRÁFICOS 3D t = linspace(0,6*pi,100); plot3(sin(t),cos(t),t); xlabel('seno(t)'); ylabel('cosseno(t)'); zlabel('z = t'); title('grafico de helice'); grid on; 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 7
8 CRIAÇÃO DE GRADE Aula anterior: impõe a quantidade de valores x = linspace(0,2,3) % Geracao de valores para 'x', y = linspace(3,5,2) % Geracao de valores para 'y' [X,Y] = meshgrid(x,y) % Criacao da matriz da malha 'xy' Z=X.*Y 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 8
![MESH VS SURF x = -5:0.5:5; % Definicao da malha de pontos no eixo 'x' y = x; % Repeticao da malha do eixo x para o eixo 'y' [X,Y] = meshgrid(x,y); % Criacao da matriz da malha 'xy' Z = X.^ 2 + Y.](/docs-images/101/149376140/images/9-0.jpg "^ 2; % Calculo da funcao z = f(x,y) mesh(x,y,z) % Tracado do grafico da funcao 'z' [X,Y] = meshgrid(-8:.5:8); R = sqrt(x.^2 + Y.^2) + eps; Z = sin(r).")
9 MESH VS SURF x = -5:0.5:5; % Definicao da malha de pontos no eixo 'x' y = x; % Repeticao da malha do eixo x para o eixo 'y' [X,Y] = meshgrid(x,y); % Criacao da matriz da malha 'xy' Z = X.^ 2 + Y.^ 2; % Calculo da funcao z = f(x,y) mesh(x,y,z) % Tracado do grafico da funcao 'z' [X,Y] = meshgrid(-8:.5:8); R = sqrt(x.^2 + Y.^2) + eps; Z = sin(r)./r; surf(x,y,z) colormap hsv % define o mapa de cores colorbar % para colocar a barra de cores Para eliminar as linhas de grade da superfície: surf(x,y,z,'edgecolor','none') 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 9
10 Tabela 12, pág e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 10
11 PROGRAMAÇÃO 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 11
12 SCRIPT SALVE O ARQUIVO FREEFALL.M % Script 1 - script file to compute the %velocity of the free-falling bungee jumper for %the case where the initial velocity is zero. clear all %limpa toda a memoria clc %limpa a janela de comando g = 9.81; m = 68.1; t = 12; cd = 0.25; % g = gravity (m/s^2) % m = mass (kg) % t = time (s) % cd = second-order drag coefficient (kg/m) v = sqrt(g * m / cd) * tanh(sqrt(g * cd / m) * t) 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 12
13 FUNCTION VARIÁVEL DE SAÍDA function v = freefall(t, m, cd) NOME DA SUA FUNCTION (salve para ver que o MatLab automaticamente dará esse nome) % freefall: bungee velocity with second-order drag % v=freefall(t,m,cd) computes the free-fall velocity % of an object with second-order drag % input: t=time(s), m=mass(kg), cd=2nd drag coeff(kg/m) % output: v = downward velocity (m/s) g = 9.81; % acceleration of gravity VARIÁVEIS DE ENTRADA v = sqrt(g * m / cd)*tanh(sqrt(g * cd / m) * t); texto usado para informar o usuário sobre a função (esta parte pode ser chamada digitando help freefall na janela de comandos) 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 13
14 Cada função trabalha com variáveis locais, isoladas do espaço de memória do workspace. 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 14
15 % Script 2 - script file to compute the %velocity of the free-falling bungee jumper for %the case where the initial velocity is zero. clear all %limpa toda a memoria clc %limpa a janela de comando g = 9.81; m = 68.1; t = 12; cd = 0.25; % g = gravity (m/s^2) % m = mass (kg) % t = time (s) % cd = second-order drag coefficient (kg/m) v = freefall(t, m, cd) 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 15
16 ESTUDO DE CASO DA AULA 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 16


17 ACELERÔMETRO MECÂNICO 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 17

18 ACELERÔMETRO PIEZOELÉTRICOS Piezoeletricidade é a propriedade que certos materiais cristalinos possuem de se tornarem eletricamente carregados quando submetidos a uma tensão mecânica. Carcaça Material Piezoelétrico xሷ M Sinal 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 18


19 PIEZOELÉTRICO 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 19

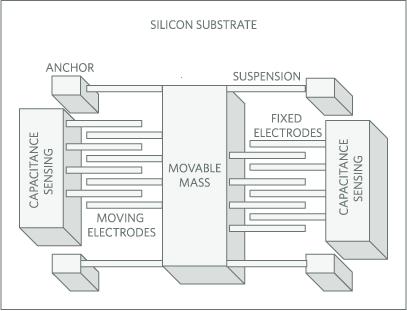
20 ACELERÔMETRO CAPACITIVO c k C = ε 0 A d ε 0 : permissividade do meio xሷ M C 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 20


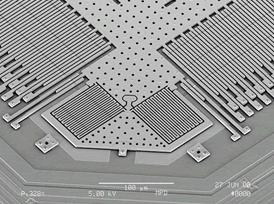
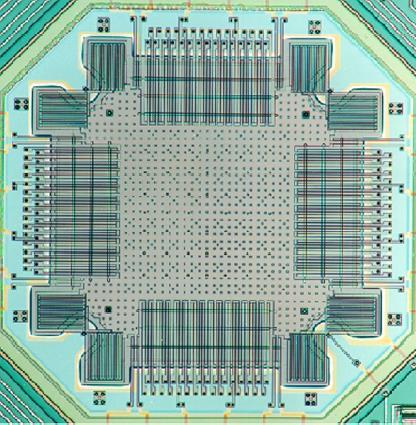
21 MICRO-ELECTRO-MECHANICAL SYSTEMS MEMS Despite the fact that MEMS accelerometers have been built into automotive airbags since the mid-90s, few people were aware of their existence until 2006 when the Nintendo Wii game consoles started taking over their living rooms. MEMS motion sensors are now widely used in automotive electronics, medical equipment, hard disk drives, and portable consumer electronics. Today a smart phone can hardly be called smart if it doesn t include a MEMS accelerometer, gyroscope and possibly a compass, too. A small niche product five years ago, MEMS sensors now constitute a multibillion dollar industry. By John Donovan, Low-Power Design MEMS Motion Sensors: The Technology Behind the Technology Sensor e atuador.

22 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 22


23 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 23
24 EXERCÍCIO SEMANA 02 Considere o acelerômetro solidário à estrutura de um avião, conforme ilustrado abaixo. A posição do avião em relação a um referencial fixo é dada por x V e a posição da massa do acelerômetro (M) em relação ao veículo é dada por x. O avião encontra-se em velocidade de cruzeiro (constante). A mola está em seu comprimento natural e a massa M em repouso em relação à carcaça do acelerômetro. Submete-se, então, o avião a uma aceleração constante. A. A equação diferencial que relaciona a aceleração do avião com o movimento da massa M em relação ao avião. B. Para pequenas inclinações em relação à horizontal, repita o item a) considerando o ângulo de inclinação no vetor de entradas. Identifique a limitação deste tipo de sensor, que, idealmente, deve fornecer uma leitura da aceleração do movimento do avião. C. Discuta os resultados que você obteve nos itens A e B. D. Para uma aceleração senoidal, verifique a resposta do acelerômetro, em um plano horizontal. Discuta os resultados. 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 24

25 Enunciado do material avulso, baseado no item 10 da lista de exercícios do Prof Eduardo Cabral. Prazo de entrega: até meia noite de hoje, 23/3, no Moodle. 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 25
26 MÉTODO DE EULER v x x 1 declividade: v0 v 0 x declividade: f t 0, x 0, v 0 0 v 1 t 0 t 1 = t 0 + t t t 1 = t 0 + t x 1 = x 0 + tv 0 v 1 = v 0 + t f t 0, x 0, v 0 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 26 t 0 t 1 = t 0 + t t
27 FIM DO SEGUNDO MÓDULO 16 e 23 de março de 2018 PMR 3306 LABORATÓRIO DE SISTEMAS DINÂMICOS I 27
Introdução ao MATLAB. Parte 3
 Introdução ao MATLAB Parte 3 6 Gráficos 2D Há diversos comandos para produzir gráficos em 2D (veja a Figura ). O mais utilizado deles é o comando plot. Ele admite argumentos de entrada, que permitem adicionar
Introdução ao MATLAB Parte 3 6 Gráficos 2D Há diversos comandos para produzir gráficos em 2D (veja a Figura ). O mais utilizado deles é o comando plot. Ele admite argumentos de entrada, que permitem adicionar
MATLAB Avançado. Melissa Weber Mendonça 1 2011.2. 1 Universidade Federal de Santa Catarina. M. Weber Mendonça (UFSC) MATLAB Avançado 2011.
 MATLAB Avançado 2011.") MATLAB Avançado Melissa Weber Mendonça 1 1 Universidade Federal de Santa Catarina 2011.2 M. Weber Mendonça (UFSC) MATLAB Avançado 2011.2 1 / 37 MATLAB Básico: Números reais >> a = 1 >> b = 2 >> a + b M.
MATLAB Avançado Melissa Weber Mendonça 1 1 Universidade Federal de Santa Catarina 2011.2 M. Weber Mendonça (UFSC) MATLAB Avançado 2011.2 1 / 37 MATLAB Básico: Números reais >> a = 1 >> b = 2 >> a + b M.
Usando a ferramenta MATLAB
 S I S T E M A S D I N Â M I C O S PA R A M E C AT R Ô N I C A I Usando a ferramenta MATLAB Universidade de São Paulo Escola Politécnica C O N T E Ú D O i introdução ao matlab 1 1 introdução 2 1.1 Ferramenta
S I S T E M A S D I N Â M I C O S PA R A M E C AT R Ô N I C A I Usando a ferramenta MATLAB Universidade de São Paulo Escola Politécnica C O N T E Ú D O i introdução ao matlab 1 1 introdução 2 1.1 Ferramenta
Gráficos em duas dimensões
 Gráficos MATLAB 2 A função básica para a elaboração de gráficos bidimensionais é o comando plot: Exemplo x = -10:1:10; y = x.^2; plot(x,y,'-r'); title('grafico de x^2'); Exemplo x = -10:1:10; y = x.^2;
Gráficos MATLAB 2 A função básica para a elaboração de gráficos bidimensionais é o comando plot: Exemplo x = -10:1:10; y = x.^2; plot(x,y,'-r'); title('grafico de x^2'); Exemplo x = -10:1:10; y = x.^2;
Características Básicas
 Características Básicas Software de simulação matemática; Realiza operações matriciais,constrói gráficos em 2D e 3D,ajuda no processamento de sinais; Facilidade na linguagem em um ambiente interativo;
Características Básicas Software de simulação matemática; Realiza operações matriciais,constrói gráficos em 2D e 3D,ajuda no processamento de sinais; Facilidade na linguagem em um ambiente interativo;
Minicurso MATLAB BÁSICO MÓDULO 3
 Minicurso MATLAB BÁSICO MÓDULO 3 Roteiro do terceiro módulo Gráficos Bidimensionais e Tridimensionais Interpolação e Extrapolação Ajuste de Curvas Gráficos Bidimensionais O MatLab se apresenta como uma
Minicurso MATLAB BÁSICO MÓDULO 3 Roteiro do terceiro módulo Gráficos Bidimensionais e Tridimensionais Interpolação e Extrapolação Ajuste de Curvas Gráficos Bidimensionais O MatLab se apresenta como uma
Matlab Noções introdutórias. Roteiro para aula
 Matlab Noções introdutórias Roteiro para aula Matlab- Variáveis Pode-se criar variáveis na área de trabalho Comandos encerrados com ; não geram eco na área de trabalho >> a = 65 a = 65 >> a = 65; >> Matlab-
Matlab Noções introdutórias Roteiro para aula Matlab- Variáveis Pode-se criar variáveis na área de trabalho Comandos encerrados com ; não geram eco na área de trabalho >> a = 65 a = 65 >> a = 65; >> Matlab-
Dinâmica de um metrónomo básico
 Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
GEO742: Tópicos Especiais em Geologia Exploratória II Métodos semiquantitativos
 Universidade Federal do Paraná Programa de Pós-Graduação em Geologia GEO742: Tópicos Especiais em Geologia Exploratória II Métodos semiquantitativos Saulo P. Oliveira Departmento de Matemática, Universidade
Universidade Federal do Paraná Programa de Pós-Graduação em Geologia GEO742: Tópicos Especiais em Geologia Exploratória II Métodos semiquantitativos Saulo P. Oliveira Departmento de Matemática, Universidade
CÁLCULO NUMÉRICO. Profa. Dra. Yara de Souza Tadano
 CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 10 04/2014 Matlab Métodos para zeros reais de funções Algoritmo do Método da Bissecção Seja f (x) contínua em [a, b] e tal
CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 10 04/2014 Matlab Métodos para zeros reais de funções Algoritmo do Método da Bissecção Seja f (x) contínua em [a, b] e tal
MÉTODO DE ELEMENTOS FINITOS (MEF)
") 3 0 Exercício Programa de PMR 2420 Data de entrega: 17/06/2013 (até as 17:00hs) MÉTODO DE ELEMENTOS FINITOS (MEF) 1) Considere a estrutura da figura abaixo sujeita a duas cargas concentradas F 3 (t) e
3 0 Exercício Programa de PMR 2420 Data de entrega: 17/06/2013 (até as 17:00hs) MÉTODO DE ELEMENTOS FINITOS (MEF) 1) Considere a estrutura da figura abaixo sujeita a duas cargas concentradas F 3 (t) e
CÁLCULO NUMÉRICO. Profa. Dra. Yara de Souza Tadano
 CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 7 Matlab Noções Básicas de MATLAB INTRODUÇÃO Cálculo Numérico 3/55 LAYOUT DO MATLAB Espaço destinado às variáveis veis que
CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 7 Matlab Noções Básicas de MATLAB INTRODUÇÃO Cálculo Numérico 3/55 LAYOUT DO MATLAB Espaço destinado às variáveis veis que
MATLAB EM VIBRAÇÕES MECÂNICAS
 MATLAB EM VIBRAÇÕES MECÂNICAS O QUE É O MATLAB? O MATLAB ( MATrix LABoratory ) é um pacote de programas computacionais que pode ser usado para a resolução de uma variedade de problemas científicos e de
MATLAB EM VIBRAÇÕES MECÂNICAS O QUE É O MATLAB? O MATLAB ( MATrix LABoratory ) é um pacote de programas computacionais que pode ser usado para a resolução de uma variedade de problemas científicos e de
ENGENHARIA ELÉTRICA UMC ELETRÔNICA DE POTÊNCIA I LABORATÓRIO DE ACIONAMENTO DE MÁQUINAS ELÉTRICAS Professor José Roberto Marques docente da UMC
 ENGENHARIA ELÉTRICA UMC ELETRÔNICA DE POTÊNCIA I LABORATÓRIO DE ACIONAMENTO DE MÁQUINAS ELÉTRICAS Professor José Roberto Marques docente da UMC PARTE 1: SIMULAÇÂO DE MÁQUINA DE CORRENTE CONTÍNUA A modelagem
ENGENHARIA ELÉTRICA UMC ELETRÔNICA DE POTÊNCIA I LABORATÓRIO DE ACIONAMENTO DE MÁQUINAS ELÉTRICAS Professor José Roberto Marques docente da UMC PARTE 1: SIMULAÇÂO DE MÁQUINA DE CORRENTE CONTÍNUA A modelagem
INTRODUÇÃO AO MATLAB. Hélder P. Oliveira
 INTRODUÇÃO AO MATLAB Hélder P. Oliveira helder.f.oliveira@inescporto.pt 16 de fevereiro de 2017 TÓPICOS Conceitos básicos, variáveis, scripts, funções Matrizes, vectores e outras estruturas Gráficos Operadores
INTRODUÇÃO AO MATLAB Hélder P. Oliveira helder.f.oliveira@inescporto.pt 16 de fevereiro de 2017 TÓPICOS Conceitos básicos, variáveis, scripts, funções Matrizes, vectores e outras estruturas Gráficos Operadores
SCS Sistemas de Controle / Servomecanismos. Aula 01 Introdução ao software MATLAB
 Aula 01 Introdução ao software MATLAB O MATLAB (Matrix Laboratory) é um ambiente de programação de alto desempenho voltado para a resolução de problemas expressos em notação matemática, projeto e simulação
Aula 01 Introdução ao software MATLAB O MATLAB (Matrix Laboratory) é um ambiente de programação de alto desempenho voltado para a resolução de problemas expressos em notação matemática, projeto e simulação
UNIVERSIDADE DE SÃO PAULO Escola de Engenharia de Lorena EEL. Questão 1
 UNIVERSIDADE DE SÃO PAULO Escola de Engenharia de Lorena EEL Questão 1 A transmissão de rádio é feita através da difusão de ondas eletromagnéticas. Estas são transmitidas no ar mais eficientemente em altas
UNIVERSIDADE DE SÃO PAULO Escola de Engenharia de Lorena EEL Questão 1 A transmissão de rádio é feita através da difusão de ondas eletromagnéticas. Estas são transmitidas no ar mais eficientemente em altas
Universidade Federal de Juiz de Fora Programa de Pós-Graduação em Modelagem Computacional. Rodrigo Barbosa de Santis
 Universidade Federal de Juiz de Fora Programa de Pós-Graduação em Modelagem Computacional Rodrigo Barbosa de Santis Introdução Vetores Gráficos Controle e Repetição Polinômios Caixeiro Viajante MATLAB
Universidade Federal de Juiz de Fora Programa de Pós-Graduação em Modelagem Computacional Rodrigo Barbosa de Santis Introdução Vetores Gráficos Controle e Repetição Polinômios Caixeiro Viajante MATLAB
Dinâmica de um metrónomo básico
 Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
3 0 Exercício Programa de PMR 2420 Data de entrega: 20/06/2016 (até as 17:00hs)
") 3 0 Exercício Programa de PMR 2420 Data de entrega: 20/06/2016 (até as 17:00hs) Prof. Dr. Emílio Carlos Nelli Silva / Prof. Dr. Flávio Buiochi Método de Elementos Finitos (MEF) 1) A estrutura da figura
3 0 Exercício Programa de PMR 2420 Data de entrega: 20/06/2016 (até as 17:00hs) Prof. Dr. Emílio Carlos Nelli Silva / Prof. Dr. Flávio Buiochi Método de Elementos Finitos (MEF) 1) A estrutura da figura
Introdução ao MATLAB. Afonso Paiva ICMC-USP
 Introdução ao MATLAB Afonso Paiva ICMC-USP MATrix LABoratory é um software para computação científica resolve numericamente problemas matemáticos de forma rápida e eficiente possui uma família de pacotes
Introdução ao MATLAB Afonso Paiva ICMC-USP MATrix LABoratory é um software para computação científica resolve numericamente problemas matemáticos de forma rápida e eficiente possui uma família de pacotes
Minicurso de MATLAB. Programa de Educação Tutorial de Engenharia Elétrica 28/03/15. lmax Rodrigues. lcaroline Pereira.
 Minicurso de MATLAB Programa de Educação Tutorial de Engenharia Elétrica lmax Rodrigues lcaroline Pereira lnayara Medeiros 28/03/15 Gráficos no Matlab O Matlab possui várias rotinas para plotagens gráficas
Minicurso de MATLAB Programa de Educação Tutorial de Engenharia Elétrica lmax Rodrigues lcaroline Pereira lnayara Medeiros 28/03/15 Gráficos no Matlab O Matlab possui várias rotinas para plotagens gráficas
MATLAB. Que é MATLAB?
 MATLAB Que é MATLAB? MATLAB é o nome abreviado de MATrix LABoratory. MATLAB é um programa para realizar cálculos numéricos com vetores e matrizes. Como caso particular pode também trabalhar com números
MATLAB Que é MATLAB? MATLAB é o nome abreviado de MATrix LABoratory. MATLAB é um programa para realizar cálculos numéricos com vetores e matrizes. Como caso particular pode também trabalhar com números
INTRODUÇÃO AO MATLAB - PARTE 2
 INTRODUÇÃO AO MATLAB - PARTE 2 Murilo F. Tomé - ICMC-USP Operadores Relacionais/Lógicos Estruturas de Seleção e Repetição Introdução polinômios Gráficos Operadores relacionais Símbolo Operador = = igual
INTRODUÇÃO AO MATLAB - PARTE 2 Murilo F. Tomé - ICMC-USP Operadores Relacionais/Lógicos Estruturas de Seleção e Repetição Introdução polinômios Gráficos Operadores relacionais Símbolo Operador = = igual
Prof. Dr. Marco Antonio Leonel Caetano
 Forecasting e Otimização de Carteiras com Matlab Prof. Dr. Marco Antonio Matlab O que é? Como funciona? Fundamentos - Ambiente de programação avançada - Ambiente de execução de programas - Permite utilização
Forecasting e Otimização de Carteiras com Matlab Prof. Dr. Marco Antonio Matlab O que é? Como funciona? Fundamentos - Ambiente de programação avançada - Ambiente de execução de programas - Permite utilização
RESOLVENDO PROBLEMAS DE ENGENHARIA COM MATLAB
 CURSO DE EXTENSÃO: AULA INAUGURAL RESOLVENDO PROBLEMAS DE ENGENHARIA COM MATLAB INSTRUTOR: Prof. Dr. Carlos Henrique Farias dos Santos Objetivo: Apresentar conceitos básicos do ambiente de programação
CURSO DE EXTENSÃO: AULA INAUGURAL RESOLVENDO PROBLEMAS DE ENGENHARIA COM MATLAB INSTRUTOR: Prof. Dr. Carlos Henrique Farias dos Santos Objetivo: Apresentar conceitos básicos do ambiente de programação
REPRESENTAÇÃO DE SISTEMAS DINÂMICOS NA FORMA DO ESPAÇO DOS ESTADOS
 REPRESENTAÇÃO DE SISTEMAS DINÂMICOS NA FORMA DO ESPAÇO DOS ESTADOS. Espaço dos estados Representação da dinâmica de um sistema de ordem n usando n equações diferenciais de primeira ordem. Sistema é escrito
REPRESENTAÇÃO DE SISTEMAS DINÂMICOS NA FORMA DO ESPAÇO DOS ESTADOS. Espaço dos estados Representação da dinâmica de um sistema de ordem n usando n equações diferenciais de primeira ordem. Sistema é escrito
17 a 19 de fevereiro de 2009
 CURSO de NIVELAMENTO Métodos Computacionais Data: 10 a 12 de fevereiro de 2009 e 17 a 19 de fevereiro de 2009 PARTE I - INTRODUÇÃO À PROGRAMAÇÃO Rogério Pagano (MatLab) Eduardo Lemos (Maple e EMSO) INTRODUÇÃO
CURSO de NIVELAMENTO Métodos Computacionais Data: 10 a 12 de fevereiro de 2009 e 17 a 19 de fevereiro de 2009 PARTE I - INTRODUÇÃO À PROGRAMAÇÃO Rogério Pagano (MatLab) Eduardo Lemos (Maple e EMSO) INTRODUÇÃO
I-3 Introdução ao Matlab
 I-3 Introdução ao Matlab Comunicações Sumário 1. Matlab MATrix LABoratory 2. Formas de utilização a) A janela de comandos b) Scripts c) Funções 3. Sintaxe, variáveis, matrizes e vetores 4. Operações comuns
I-3 Introdução ao Matlab Comunicações Sumário 1. Matlab MATrix LABoratory 2. Formas de utilização a) A janela de comandos b) Scripts c) Funções 3. Sintaxe, variáveis, matrizes e vetores 4. Operações comuns
Aula 04 Representação de Sistemas
 Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Aula 04 Representação de Sistemas Relação entre: Função de Transferência Transformada Laplace da saída y(t) - Transformada Laplace da entrada x(t) considerando condições iniciais nulas. Pierre Simon Laplace,
Informática para Ciências e Engenharias 2013/14. Teórica 5
 Informática para Ciências e Engenharias 2013/14 Teórica 5 Na aula de hoje... Representação de imagens pixels, sistema RGB Gráficos em MATLAB Gráficos simples Imagens 2D Exemplo: difusão Gráficos 3D Exemplo:
Informática para Ciências e Engenharias 2013/14 Teórica 5 Na aula de hoje... Representação de imagens pixels, sistema RGB Gráficos em MATLAB Gráficos simples Imagens 2D Exemplo: difusão Gráficos 3D Exemplo:
Introdução ao MATLAB. Afonso Paiva ICMC-USP
 Introdução ao MATLAB Afonso Paiva ICMC-USP MATrix LABoratory é um software para computação científica resolve numericamente problemas matemáticos de forma rápida e eficiente possui uma família de pacotes
Introdução ao MATLAB Afonso Paiva ICMC-USP MATrix LABoratory é um software para computação científica resolve numericamente problemas matemáticos de forma rápida e eficiente possui uma família de pacotes
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA. 2ª Lista de SEL0417 Fundamentos de Controle.
 UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA ª Lista de SEL0417 undamentos de Controle Professor: Rodrigo Andrade Ramos Questão 1 Suponha que um satélite
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHRIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA ELÉTRICA ª Lista de SEL0417 undamentos de Controle Professor: Rodrigo Andrade Ramos Questão 1 Suponha que um satélite
Experiência 5. Projeto e Simulação do Controle no Espaço de Estados de um Pêndulo Invertido sobre Carro
 Experiência 5 Projeto e Simulação do Controle no Espaço de Estados de um Pêndulo Invertido sobre Carro Professores: Adolfo Bauchspiess e Geovany A. Borges O objetivo deste experimento é projetar e simular
Experiência 5 Projeto e Simulação do Controle no Espaço de Estados de um Pêndulo Invertido sobre Carro Professores: Adolfo Bauchspiess e Geovany A. Borges O objetivo deste experimento é projetar e simular
CÁLCULO NUMÉRICO. Profa. Dra. Yara de Souza Tadano
 CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 10 04/2014 Scilab Métodos para zeros reais de funções Algoritmo do Método da Bissecção Seja f (x) contínua em [a, b] e tal
CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 10 04/2014 Scilab Métodos para zeros reais de funções Algoritmo do Método da Bissecção Seja f (x) contínua em [a, b] e tal
UNIVERSIDADE DE SÃO PAULO Escola de Engenharia de Lorena EEL. Questão1
 UNIVERSIDADE DE SÃO PAULO Escola de Engenharia de Lorena EEL Questão1 Nota musical: é um termo empregado para designar o elemento mínimo de um som, formado por um único modo de vibração do ar. Sendo assim,
UNIVERSIDADE DE SÃO PAULO Escola de Engenharia de Lorena EEL Questão1 Nota musical: é um termo empregado para designar o elemento mínimo de um som, formado por um único modo de vibração do ar. Sendo assim,
Análise matricial de estruturas usando Matlab
 Análise matricial de estruturas usando Matlab Carregando o MATLAB O Matlab pode ser utilizado em qualquer maquina da Escola Politécnica, todos os computadores da pró-aluno o tem instalado. No Gerenciador
Análise matricial de estruturas usando Matlab Carregando o MATLAB O Matlab pode ser utilizado em qualquer maquina da Escola Politécnica, todos os computadores da pró-aluno o tem instalado. No Gerenciador
MATLAB Avançado. Melissa Weber Mendonça 1 2011.2. 1 Universidade Federal de Santa Catarina. M. Weber Mendonça (UFSC) MATLAB Avançado 2011.
 MATLAB Avançado 2011.") MATLAB Avançado Melissa Weber Mendonça 1 1 Universidade Federal de Santa Catarina 2011.2 M. Weber Mendonça (UFSC) MATLAB Avançado 2011.2 1 / 39 Exemplo Usar surf ou mesh para desenhar a superfície f (x,
MATLAB Avançado Melissa Weber Mendonça 1 1 Universidade Federal de Santa Catarina 2011.2 M. Weber Mendonça (UFSC) MATLAB Avançado 2011.2 1 / 39 Exemplo Usar surf ou mesh para desenhar a superfície f (x,
Dinâmica de um metrónomo básico
 Modelação e Simulação 014/15 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 014/15 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Mini curso básico. Gilberto A. S. Segundo Fábio Carmo. Programa de Educação Tutorial
 Programa de Educação Tutorial Mini curso básico Universidade Federal do Espírito Santo Departamento de Informática Gilberto A. S. Segundo Fábio Carmo Agenda Apresentação Vetores e matrizes em matlab Comandos
Programa de Educação Tutorial Mini curso básico Universidade Federal do Espírito Santo Departamento de Informática Gilberto A. S. Segundo Fábio Carmo Agenda Apresentação Vetores e matrizes em matlab Comandos
MESTRADO INTEGRADO EM ENG. INFORMÁTICA E COMPUTAÇÃO 2011/2012. EIC0010 FÍSICA I 1o ANO 2 o SEMESTRE
 MESTRADO INTEGRADO EM ENG. INFORMÁTICA E COMPUTAÇÃO 2011/2012 EIC0010 FÍSICA I 1o ANO 2 o SEMESTRE Prova com consulta de formulário e uso de computador. Duração 2 horas. Nome do estudante: Pode consultar
MESTRADO INTEGRADO EM ENG. INFORMÁTICA E COMPUTAÇÃO 2011/2012 EIC0010 FÍSICA I 1o ANO 2 o SEMESTRE Prova com consulta de formulário e uso de computador. Duração 2 horas. Nome do estudante: Pode consultar
Fundamentos de MATLAB. Computação 2º Semestre 2016/2017
 Fundamentos de MATLAB Computação 2º Semestre 2016/2017 O Ambiente MATLAB Janela de Comando Escrever comandos Mostrar resultados em formato de texto Janela de Edição Escrever programas e funções Editar
Fundamentos de MATLAB Computação 2º Semestre 2016/2017 O Ambiente MATLAB Janela de Comando Escrever comandos Mostrar resultados em formato de texto Janela de Edição Escrever programas e funções Editar
PROGRAD / COSEAC Padrão de Respostas Física Grupos 05 e 20
 1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
1 a QUESTÃO: Dois blocos estão em contato sobre uma mesa horizontal. Não há atrito entre os blocos e a mesa. Uma força horizontal é aplicada a um dos blocos, como mostra a figura. a) Qual é a aceleração
22/Fev/2018 Aula Queda livre 2.2 Movimento 2 e 3-D Vetor deslocamento Vetor velocidade Vetor aceleração
 22/Fev/2018 Aula2 2.1 Queda livre 2.2 Movimento 2 e 3-D 2.2.1 Vetor deslocamento 2.2.2 Vetor velocidade 2.2.3 Vetor aceleração 2.3 Lançamento de projétil 2.3.1 Independência dos movimentos 2.3.2 Forma
22/Fev/2018 Aula2 2.1 Queda livre 2.2 Movimento 2 e 3-D 2.2.1 Vetor deslocamento 2.2.2 Vetor velocidade 2.2.3 Vetor aceleração 2.3 Lançamento de projétil 2.3.1 Independência dos movimentos 2.3.2 Forma
Computação e Programação 2009 / 2010
 Computação e Programação 4ª Aula de Problemas Estruturas de selecção (if-, if-if, switch) Instituto Superior Técnico, Dep. de Engenharia Mecânica - ACCAII Problema 1 Escrevaum script quepedeaoutilizadorum
Computação e Programação 4ª Aula de Problemas Estruturas de selecção (if-, if-if, switch) Instituto Superior Técnico, Dep. de Engenharia Mecânica - ACCAII Problema 1 Escrevaum script quepedeaoutilizadorum
SCILAB: MÓDULO 4 SISTEMAS E CONTROLE
 SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab 5.3.3 Dr.ª Eng.ª Mariana Santos Matos Cavalca O que é controlar? Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios)
SCILAB: MÓDULO 4 SISTEMAS E CONTROLE Scilab 5.3.3 Dr.ª Eng.ª Mariana Santos Matos Cavalca O que é controlar? Função de Transferência: breve definição u(t) Sistema LIT y(t) Usualmente (sistemas próprios)
MODELAÇÃO E SIMULAÇÃO MEEC IST, TESTE N0.1 TIPO V02. Consider o sistema dinâmico descrito pela equação diferencial
 MODELAÇÃO E SIMULAÇÃO - 2018 MEEC IST, TESTE N0.1 TIPO V02 Problema No.1 [5v] Análise de Sistemas Não Lineares Consider o sistema dinâmico descrito pela equação diferencial dx = x (x 1) +u (1) onde u é
MODELAÇÃO E SIMULAÇÃO - 2018 MEEC IST, TESTE N0.1 TIPO V02 Problema No.1 [5v] Análise de Sistemas Não Lineares Consider o sistema dinâmico descrito pela equação diferencial dx = x (x 1) +u (1) onde u é
NÍVEL BÁSICO CAPÍTULO V
 UNIVERSIDADE FEDERAL DO PARÁ CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO PROGRAMA DE EDUCAÇÃO TUTORIAL SEMANA DOS 40 ANOS DE ENGENHARIA ELÉTRICA NÍVEL BÁSICO CAPÍTULO V PROGRAMA
UNIVERSIDADE FEDERAL DO PARÁ CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO PROGRAMA DE EDUCAÇÃO TUTORIAL SEMANA DOS 40 ANOS DE ENGENHARIA ELÉTRICA NÍVEL BÁSICO CAPÍTULO V PROGRAMA
Conceitos Fundamentais de MatLab/Octave. Prof. Responsáveis Wagner Santos C. de Jesus
 Disciplina Processamento de Sinais Curso Análise e Desenvolvimento de Sistemas Conceitos Fundamentais de MatLab/Octave e-mail : wagners@bighost.com.br Prof. Responsáveis Wagner Santos C. de Jesus Introdução
Disciplina Processamento de Sinais Curso Análise e Desenvolvimento de Sistemas Conceitos Fundamentais de MatLab/Octave e-mail : wagners@bighost.com.br Prof. Responsáveis Wagner Santos C. de Jesus Introdução
CCI Laboratório de Matemática Computacional
 CCI 22 Laboratório de Matemática Computacional Prof. Paulo André http://www.comp.ita.br/~pauloac pauloac@ita.br Sala 110 Prédio da Computação Roteiro Representação de ponto flutuante Precisão da máquina
CCI 22 Laboratório de Matemática Computacional Prof. Paulo André http://www.comp.ita.br/~pauloac pauloac@ita.br Sala 110 Prédio da Computação Roteiro Representação de ponto flutuante Precisão da máquina
Breve Introdução à Programação em Scilab 6.x
 Universidade Federal do Paraná UFPR Departamento de Engenharia Química Breve Introdução à Programação em Scilab 6.x Prof. Éliton Fontana Prof. Fernando A. Pedersen Voll 2019/1 Contents 1 Conceitos Básicos
Universidade Federal do Paraná UFPR Departamento de Engenharia Química Breve Introdução à Programação em Scilab 6.x Prof. Éliton Fontana Prof. Fernando A. Pedersen Voll 2019/1 Contents 1 Conceitos Básicos
MESTRADO EM MACROECONOMIA e FINANÇAS Disciplina de Computação. Aula 06. Prof. Dr. Marco Antonio Leonel Caetano
 MESTRADO EM MACROECONOMIA e FINANÇAS Disciplina de Computação Aula 06 Prof. Dr. Marco Antonio Leonel Caetano 1 Guia de Estudo para Aula 06 Aplicação de AutoValores - Usando autovalor para encontrar pontos
MESTRADO EM MACROECONOMIA e FINANÇAS Disciplina de Computação Aula 06 Prof. Dr. Marco Antonio Leonel Caetano 1 Guia de Estudo para Aula 06 Aplicação de AutoValores - Usando autovalor para encontrar pontos
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA. SUBÁREA: Engenharias
 TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
Controlo Em Espaço de Estados. Trabalho de Laboratório nº 1 Dinâmica no Espaço de Estados
 Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 1 Dinâmica no Espaço de Estados Objectivos Após realizar este trabalho, o aluno
Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 1 Dinâmica no Espaço de Estados Objectivos Após realizar este trabalho, o aluno
UM MODELO DE UNIDADE DE MEDIDA INERCIAL UTILIZANDO 3 ACELERÔMETROS
 UM MODELO DE UNIDADE DE MEDIDA INERCIAL UTILIZANDO 3 ACELERÔMETROS ANDERSON B. N. SILVA 1, SAMUEL X. SOUZA 2, PABLO J. ALSINA 2. 1. Diretoria de Ensino Campus Picuí, Instituto Federal de Educação, Ciência
UM MODELO DE UNIDADE DE MEDIDA INERCIAL UTILIZANDO 3 ACELERÔMETROS ANDERSON B. N. SILVA 1, SAMUEL X. SOUZA 2, PABLO J. ALSINA 2. 1. Diretoria de Ensino Campus Picuí, Instituto Federal de Educação, Ciência
x, y: vetores com as MESMAS DIMENSÕES
 DESENHANDO GRÁFICOS 2D Gráfico de pontos e linhas: função plot( ) Forma geral: plot(y) plot(x, y) y: plot(x, vetor y, str) valores que serão plotados. x, y: vetores com as MESMAS DIMENSÕES str: é um texto
DESENHANDO GRÁFICOS 2D Gráfico de pontos e linhas: função plot( ) Forma geral: plot(y) plot(x, y) y: plot(x, vetor y, str) valores que serão plotados. x, y: vetores com as MESMAS DIMENSÕES str: é um texto
CCI Laboratório de Matemática Computacional
 CCI 22 Laboratório de Matemática Computacional Prof. Paulo André http://www.comp.ita.br/~pauloac pauloac@ita.br Sala 110 Prédio da Computação Roteiro Representação de ponto flutuante Precisão da máquina
CCI 22 Laboratório de Matemática Computacional Prof. Paulo André http://www.comp.ita.br/~pauloac pauloac@ita.br Sala 110 Prédio da Computação Roteiro Representação de ponto flutuante Precisão da máquina
MODELAGEM E DINÂMICA DE UM DISPOSITIVO MICRO-ELETROMECÂNICO (MEMS). MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS).
. MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS).") MODELAGEM E DINÂMICA DE UM DISPOSITIVO MICRO-ELETROMECÂNICO (MEMS). MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS). Douglas Roca Santo 1, José Manoel Balthazar 2, Bento Rodrigues de Pontes
MODELAGEM E DINÂMICA DE UM DISPOSITIVO MICRO-ELETROMECÂNICO (MEMS). MODELING AND DYNAMICS OF MICRO-ELECTROMECHANICAL DEVICE (MEMS). Douglas Roca Santo 1, José Manoel Balthazar 2, Bento Rodrigues de Pontes
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA-AERONÁUTICA. MPS 43 Sistemas e Controle
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS 43 Sistemas e Controle LABORATÓRIO 02: Projeto de um Compensador Utilizando LGR Prof. Davi Antônio dos Santos Data: Turma:
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA-AERONÁUTICA MPS 43 Sistemas e Controle LABORATÓRIO 02: Projeto de um Compensador Utilizando LGR Prof. Davi Antônio dos Santos Data: Turma:
Vetores, Matrizes e Gráficos
 Programação de Computadores I UFOP DECOM 2013 2 Aula prática 3 Vetores, Matrizes e Gráficos Resumo Nesta aula você irá utilizar vetores para resolver diversos tipos de problemas. Para expressar a solução
Programação de Computadores I UFOP DECOM 2013 2 Aula prática 3 Vetores, Matrizes e Gráficos Resumo Nesta aula você irá utilizar vetores para resolver diversos tipos de problemas. Para expressar a solução
Implementação de Métodos Recursivos. Jefferson Bertolai
 Implementação de Métodos Recursivos 2010-10-12 Objetivos Macroeconomia e heterogeneidade Otimização e pontos fixos Aprender no contexto Métodos clássicos Operações Básicas Operação Símbolo Exemplos x +
Implementação de Métodos Recursivos 2010-10-12 Objetivos Macroeconomia e heterogeneidade Otimização e pontos fixos Aprender no contexto Métodos clássicos Operações Básicas Operação Símbolo Exemplos x +
2 Declarando e usando variáveis
 1 Básico Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica ENG04450 - Sistemas de Controle Laboratório I - Introdução ao Matlab Profs. João Manoel Gomes da Silva e Romeu Reginatto
1 Básico Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica ENG04450 - Sistemas de Controle Laboratório I - Introdução ao Matlab Profs. João Manoel Gomes da Silva e Romeu Reginatto
Segundo Exercício de Modelagem e Simulação Computacional Maio 2012 EMSC#2 - MECÂNICA B PME 2200
 Segundo Exercício de Modelagem e Simulação Computacional Maio 01 EMSC# - MECÂNICA B PME 00 1. ENUNCIADO DO PROBLEMA Um planador (vide Fig. 1) se aproxima da pista do aeroporto para pouso com ângulo de
Segundo Exercício de Modelagem e Simulação Computacional Maio 01 EMSC# - MECÂNICA B PME 00 1. ENUNCIADO DO PROBLEMA Um planador (vide Fig. 1) se aproxima da pista do aeroporto para pouso com ângulo de
Capítulo 02. Princípios ásicos do MATLAB
 Capítulo 02 Princípios ásicos do MATLAB OBJETIVOS Aprender como números reais e complexos são atribuídos a variáveis, Aprender como atribuir valores a vetores e a matrizes utilizando a atribuição simples,
Capítulo 02 Princípios ásicos do MATLAB OBJETIVOS Aprender como números reais e complexos são atribuídos a variáveis, Aprender como atribuir valores a vetores e a matrizes utilizando a atribuição simples,
I-3 Introdução ao Matlab
 I-3 Introdução ao Matlab Comunicações (24 de março de 2017) 1 Sumário 1. Matlab MATrix LABoratory 2. Formas de utilização a) A janela de comandos b) Scripts c) Funções 3. Sintaxe, variáveis, matrizes e
I-3 Introdução ao Matlab Comunicações (24 de março de 2017) 1 Sumário 1. Matlab MATrix LABoratory 2. Formas de utilização a) A janela de comandos b) Scripts c) Funções 3. Sintaxe, variáveis, matrizes e
TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013
 PROAC / COSEAC UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013 INSTRUÇÕES AO CANDIDATO 20 O tempo disponível para realizar as provas dos dois cadernos o das provas específicas
PROAC / COSEAC UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013 INSTRUÇÕES AO CANDIDATO 20 O tempo disponível para realizar as provas dos dois cadernos o das provas específicas
UNIVERSIDADE ESTADUAL PAULISTA. LMAEE Laboratório de Matemática Aplicada a Engenharia Elétrica
 unesp UNIVERSIDADE ESTADUAL PAULISTA CAMPUS DE GUARATINGUETÁ DEPARTAMENTO DE ENGENHARIA ELÉTRICA LMAEE- - Laboratório de Matemática Aplicada a Engenharia Elétrica LAB. 3 RESOLUÇÃO, DE EQUAÇÕES DIFERENCIAIS
unesp UNIVERSIDADE ESTADUAL PAULISTA CAMPUS DE GUARATINGUETÁ DEPARTAMENTO DE ENGENHARIA ELÉTRICA LMAEE- - Laboratório de Matemática Aplicada a Engenharia Elétrica LAB. 3 RESOLUÇÃO, DE EQUAÇÕES DIFERENCIAIS
CÁLCULO NUMÉRICO. Profa. Dra. Yara de Souza Tadano.
 CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 7 09/2014 Matlab Métodos para zeros reais de funções Algoritmo do Método da Bissecção Seja f (x) contínua em [a, b] e tal
CÁLCULO NUMÉRICO Profa. Dra. Yara de Souza Tadano yaratadano@utfpr.edu.br Aula 7 09/2014 Matlab Métodos para zeros reais de funções Algoritmo do Método da Bissecção Seja f (x) contínua em [a, b] e tal
TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013
 PROAC / COSEAC UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013 INSTRUÇÕES AO CANDIDATO 05 O tempo disponível para realizar as provas dos dois cadernos o das provas específicas
PROAC / COSEAC UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013 INSTRUÇÕES AO CANDIDATO 05 O tempo disponível para realizar as provas dos dois cadernos o das provas específicas
2ª Lista de exercícios de Fenômenos Ondulatórios
 2ª Lista de exercícios de Fenômenos Ondulatórios Prof. Renato 1. Dada uma onda em uma corda como função de x e t. No tempo igual a zero essa onda é representada na figura seguir (y em função de x): 0,6
2ª Lista de exercícios de Fenômenos Ondulatórios Prof. Renato 1. Dada uma onda em uma corda como função de x e t. No tempo igual a zero essa onda é representada na figura seguir (y em função de x): 0,6
Computação e Programação
 Computação e Programação 10ª Aula de Problemas Tópicos Avançados sobre Funções Instituto Superior Técnico, Dep. de Engenharia Mecânica - ACCAII Problema 1 3. The velocity of sound in air is 49.02xT^(1/2)
Computação e Programação 10ª Aula de Problemas Tópicos Avançados sobre Funções Instituto Superior Técnico, Dep. de Engenharia Mecânica - ACCAII Problema 1 3. The velocity of sound in air is 49.02xT^(1/2)
Exame de Seleção PEB - Candidatos de Ciências Exatas e Engenharias - 28/11/2014
 1 Programa de Engenharia Biomédica Instituto Alberto Luiz Coimbra de Pós Graduação e Pesquisa de Engenharia - COPPE Universidade Federal do Rio de Janeiro - UFRJ Observações importantes: 1 A prova possui
1 Programa de Engenharia Biomédica Instituto Alberto Luiz Coimbra de Pós Graduação e Pesquisa de Engenharia - COPPE Universidade Federal do Rio de Janeiro - UFRJ Observações importantes: 1 A prova possui
Automatização de experimentos didáticos utilizando arduino
 https://eventos.utfpr.edu.br//sicite/sicite2017/index Automatização de experimentos didáticos utilizando arduino RESUMO Marco Antonio de Queiroz Vianna Junior Marcovianna.jr@gmail.com Universidade Tecnológica
https://eventos.utfpr.edu.br//sicite/sicite2017/index Automatização de experimentos didáticos utilizando arduino RESUMO Marco Antonio de Queiroz Vianna Junior Marcovianna.jr@gmail.com Universidade Tecnológica
Mestrado Integrado em Engenharia Electrotécnica e de Computadores - MEEC CONTROLO. 1º semestre Introdução ao Matlab e Simulink
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores - MEEC CONTROLO º semestre 0-0 Introdução ao Matlab e Simulink - Ensaios a realizar durante a sessão de Laboratório Objectivo: Familiarização
Mestrado Integrado em Engenharia Electrotécnica e de Computadores - MEEC CONTROLO º semestre 0-0 Introdução ao Matlab e Simulink - Ensaios a realizar durante a sessão de Laboratório Objectivo: Familiarização
Introdução ao MatLab Gráficos e manipulação de dados
 Análise de Sinais (500) Ficha Prática Laboratorial III Curso: Ciências Biomédicas Duração prevista: 2 horas Introdução ao MatLab Gráficos e manipulação de dados I. Introdução No decorrer deste laboratório
Análise de Sinais (500) Ficha Prática Laboratorial III Curso: Ciências Biomédicas Duração prevista: 2 horas Introdução ao MatLab Gráficos e manipulação de dados I. Introdução No decorrer deste laboratório
TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013
 PROAC / COSEAC UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013 INSTRUÇÕES AO CANDIDATO 04 O tempo disponível para realizar as provas dos dois cadernos o da prova específica
PROAC / COSEAC UNIVERSIDADE FEDERAL FLUMINENSE TRANSFERÊNCIA REINGRESSO MUDANÇA DE CURSO 2013 INSTRUÇÕES AO CANDIDATO 04 O tempo disponível para realizar as provas dos dois cadernos o da prova específica
CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 2015 / 2016
 CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 2015 / 2016 1 a QUESTÃO Valor: 1,0 Um copo está sobre uma mesa com a boca voltada para cima. Um explosivo no estado sólido
CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 2015 / 2016 1 a QUESTÃO Valor: 1,0 Um copo está sobre uma mesa com a boca voltada para cima. Um explosivo no estado sólido
Modelo Matemático simples
 Modelo Matemático simples Um modelo matemático pode ser entendido como uma expressão ou função que traduz as propriedades de um sistema físico em termos matemáticos Os modelos podem ser representados por
Modelo Matemático simples Um modelo matemático pode ser entendido como uma expressão ou função que traduz as propriedades de um sistema físico em termos matemáticos Os modelos podem ser representados por
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II
 Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Introdução ao Matlab
 Tópicos de abordagem: 1) Características do Matlab; 2) As diferentes janelas e suas funções; 3) Menus do Matlab; 4) Operadores e Constantes; 5) Variáveis; 6) Comandos básicos; Características do Matlab
Tópicos de abordagem: 1) Características do Matlab; 2) As diferentes janelas e suas funções; 3) Menus do Matlab; 4) Operadores e Constantes; 5) Variáveis; 6) Comandos básicos; Características do Matlab
Optimização do servomecanismo dum disco rígido
 Modelação e Simulação 2012/13 Trabalho de Laboratório nº 2 Optimização do servomecanismo dum disco rígido Objectivo Após realizar este trabalho, o aluno deverá ser capaz de utilizar o SIMULINK para optimizar
Modelação e Simulação 2012/13 Trabalho de Laboratório nº 2 Optimização do servomecanismo dum disco rígido Objectivo Após realizar este trabalho, o aluno deverá ser capaz de utilizar o SIMULINK para optimizar
Simulação de Sistemas Dinâmicos Lineares Visão Geral do Simulink
 Universidade de Brasília Laboratório de Análise Dinâmica Linear Experimento 01 - segunda parte Simulação de Sistemas Dinâmicos Lineares Visão Geral do Simulink Lab ADL (Experimento 01-2a parte) Simulação
Universidade de Brasília Laboratório de Análise Dinâmica Linear Experimento 01 - segunda parte Simulação de Sistemas Dinâmicos Lineares Visão Geral do Simulink Lab ADL (Experimento 01-2a parte) Simulação
Breve Introdução à Programação em Scilab 6.0
 Universidade Federal do Paraná UFPR Departamento de Engenharia Química Breve Introdução à Programação em Scilab 6.0 Prof. Éliton Fontana 2018/2 2 Conteúdo 1 Conceitos Básicos 4 2 Operando Vetores e Matrizes
Universidade Federal do Paraná UFPR Departamento de Engenharia Química Breve Introdução à Programação em Scilab 6.0 Prof. Éliton Fontana 2018/2 2 Conteúdo 1 Conceitos Básicos 4 2 Operando Vetores e Matrizes
Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Twin Rotor MIMO System (TRMS)
") Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Twin Rotor MIMO System (TRMS) 1 Rotor Duplo (TRMS - Twin Rotor MIMO System) A unidade TRMS da Feedback
Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Twin Rotor MIMO System (TRMS) 1 Rotor Duplo (TRMS - Twin Rotor MIMO System) A unidade TRMS da Feedback
Sistemas Dinâmicos Lineares
 Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
Sumário Sistemas Dinâmicos Lineares 4 de julho de 2016 () Sistemas Dinâmicos Lineares 4 de julho de 2016 1 / 29 () Sistemas Dinâmicos Lineares 4 de julho de 2016 2 / 29 Apresentação da disciplina Objetivos
FEP Física Geral e Experimental para Engenharia I
 FEP2195 - Física Geral e Experimental para Engenharia I Prova Substitutiva - Gabarito 1. Dois blocos de massas 4, 00 kg e 8, 00 kg estão ligados por um fio e deslizam para baixo de um plano inclinado de
FEP2195 - Física Geral e Experimental para Engenharia I Prova Substitutiva - Gabarito 1. Dois blocos de massas 4, 00 kg e 8, 00 kg estão ligados por um fio e deslizam para baixo de um plano inclinado de
11/09/2016. Larissa Driemeier Marcilio Alves Rafael Moura Tarcisio Coelho CAPACITÂNCIA LIVRO TEXTO. Essa aula é baseada nos livros:
 CAPACITÂNCIA Larissa Driemeier Marcilio Alves Rafael Moura Tarcisio Coelho LIVRO TEXTO Essa aula é baseada nos livros: 1 UM POUCO SOBRE CAPACITÂNCIA CAPACITOR Um capacitor é um sistema constituído por
CAPACITÂNCIA Larissa Driemeier Marcilio Alves Rafael Moura Tarcisio Coelho LIVRO TEXTO Essa aula é baseada nos livros: 1 UM POUCO SOBRE CAPACITÂNCIA CAPACITOR Um capacitor é um sistema constituído por
Questão Valor Grau Revisão
 PUC-RIO CB-CTC G1 DE FIS 1033 Nome: GABARITO Turma: Matrícula: Questão Valor Grau Revisão 1ª 3,0 2ª 4,0 3ª 3,0 TOTAL Identidades trigonométricas: sen (2 ) = 2 sen ( ) cos ( ) As respostas sem justificativa
PUC-RIO CB-CTC G1 DE FIS 1033 Nome: GABARITO Turma: Matrícula: Questão Valor Grau Revisão 1ª 3,0 2ª 4,0 3ª 3,0 TOTAL Identidades trigonométricas: sen (2 ) = 2 sen ( ) cos ( ) As respostas sem justificativa
Exame de Ingresso ao PPG- AEM 2012/2sem
 Universidade de São Paulo Escola de Engenharia de São Carlos Exame de Ingresso ao PPG- AEM 2012/2sem Nome do Candidato: R.G.: Data: Assinatura: Indique a área de concentração de interesse (em ordem decrescente
Universidade de São Paulo Escola de Engenharia de São Carlos Exame de Ingresso ao PPG- AEM 2012/2sem Nome do Candidato: R.G.: Data: Assinatura: Indique a área de concentração de interesse (em ordem decrescente
Aula 6. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 6 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Março de 2012. Resumo 1 Introdução Espaço
Aula 6 Carlos Amaral Fonte: Cristiano Quevedo Andrea UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Março de 2012. Resumo 1 Introdução Espaço
NÍVEL BÁSICO CAPÍTULO III
 UNIVERSIDADE FEDERAL DO PARÁ CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO PROGRAMA DE EDUCAÇÃO TUTORIAL SEMANA DOS 40 ANOS DE ENGENHARIA ELÉTRICA NÍVEL BÁSICO CAPÍTULO III PROGRAMA
UNIVERSIDADE FEDERAL DO PARÁ CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO PROGRAMA DE EDUCAÇÃO TUTORIAL SEMANA DOS 40 ANOS DE ENGENHARIA ELÉTRICA NÍVEL BÁSICO CAPÍTULO III PROGRAMA
SCS Sistemas de Controle / Servomecanismos. Aula 04 Diagrama do lugar geométrico das raízes
 Aula 04 Diagrama do lugar geométrico das raízes Definição: O lugar das raízes de um sistema é um gráfico que representa a trajetória das raízes de sua equação característica pólos da função de transferência
Aula 04 Diagrama do lugar geométrico das raízes Definição: O lugar das raízes de um sistema é um gráfico que representa a trajetória das raízes de sua equação característica pólos da função de transferência
Instituto Politécnico de Tomar Escola Superior de Tecnologia de Tomar ÁREA INTERDEPARTAMENTAL DE FÍSICA
 Engenharia Civil Exercícios de Física de Física Ficha 8 Corpo Rígido Capítulo 6 Ano lectivo 010-011 Conhecimentos e capacidades a adquirir pelo aluno Aplicação das leis fundamentais da dinâmica. Aplicação
Engenharia Civil Exercícios de Física de Física Ficha 8 Corpo Rígido Capítulo 6 Ano lectivo 010-011 Conhecimentos e capacidades a adquirir pelo aluno Aplicação das leis fundamentais da dinâmica. Aplicação
Força direção magnitude magnitude
 Leis de Newton Sir Isaac Newton 1642 1727 Formulou as leis básicas da mecânica. Descobriu a Lei da Gravitação Universal. Inventou o cálculo Diferencial e Integral. Fez muitas observações sobre luz e óptica.
Leis de Newton Sir Isaac Newton 1642 1727 Formulou as leis básicas da mecânica. Descobriu a Lei da Gravitação Universal. Inventou o cálculo Diferencial e Integral. Fez muitas observações sobre luz e óptica.
2 Descrição da Unidade de Levitação Magnética e Sistema de Controle
 Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Levitação Eletromagnética 1 Levitação Eletromagnética O módulo de Levitação Magnética da Feedback
Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Levitação Eletromagnética 1 Levitação Eletromagnética O módulo de Levitação Magnética da Feedback
Dinâmica de um metrónomo básico
 Modelação e Simulação 018/19 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 018/19 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Minicurso de MATLAB. Programa de Educação Tutorial de Engenharia Elétrica 28/03/15. lmax Rodrigues. lcaroline Pereira.
 Minicurso de MATLAB Programa de Educação Tutorial de Engenharia Elétrica lmax Rodrigues lcaroline Pereira lnayara Medeiros Ementa do Curso Primeiros Passos no MATLAB Vetores e Matrizes Resolução de sistemas
Minicurso de MATLAB Programa de Educação Tutorial de Engenharia Elétrica lmax Rodrigues lcaroline Pereira lnayara Medeiros Ementa do Curso Primeiros Passos no MATLAB Vetores e Matrizes Resolução de sistemas
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA SEM 5766 ANÁLISE MODAL DE ESTRUTURAS
 UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA SEM 5766 ANÁLISE MODAL DE ESTRUTURAS Aula # 1 Introdução 1 Prof. Paulo S. Varoto 1.1- Objetivos da Disciplina
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA SEM 5766 ANÁLISE MODAL DE ESTRUTURAS Aula # 1 Introdução 1 Prof. Paulo S. Varoto 1.1- Objetivos da Disciplina