Simulação e controle inteligente de tráfego veicular urbano
|
|
|
- Betty Sintra Aldeia
- 8 Há anos
- Visualizações:
Transcrição
1 Simulação e controle inteligente de tráfego veicular urbano Instituto de Informática - UFRGS XVII Seminário de Computação (SEMINCO) 04/11/2008
")
2 Roteiro Introdução O Simulador ITSUMO Simulação de Caso Real: Av. Assis Brasil (POA) Controle utilizando agentes inteligentes Aprendizado multiagente aplicado ao controle Aprendizado com cooperação oportunística Conclusões

3 Introdução Sociedade moderna: Alta demanda por mobilidade Propostas vêm sendo desenvolvidas por diferentes disciplinas como: engenharia de tráfego, computação, física entre outras.

4 Controle de Tráfego Uma abordagem clássica utiliza a sincronização dos semáforos de modo que os veículos possam atravessar uma via arterial em uma direção com uma velocidade específica, sem paradas = onda verde.


5 Controle de Tráfego Porto Alegre: 908 cruzamentos controlados 82% conectados a central nenhum inteligente... Em cidades com urbanização complexa, não se pode usar uma sincronização fixa!

6 Controle de Tráfego Sistemas adaptativos oferecem soluções flexíveis! São Paulo: 4590 cruzamentos controlados 1507 cruzamentos inteligentes 165 câmeras

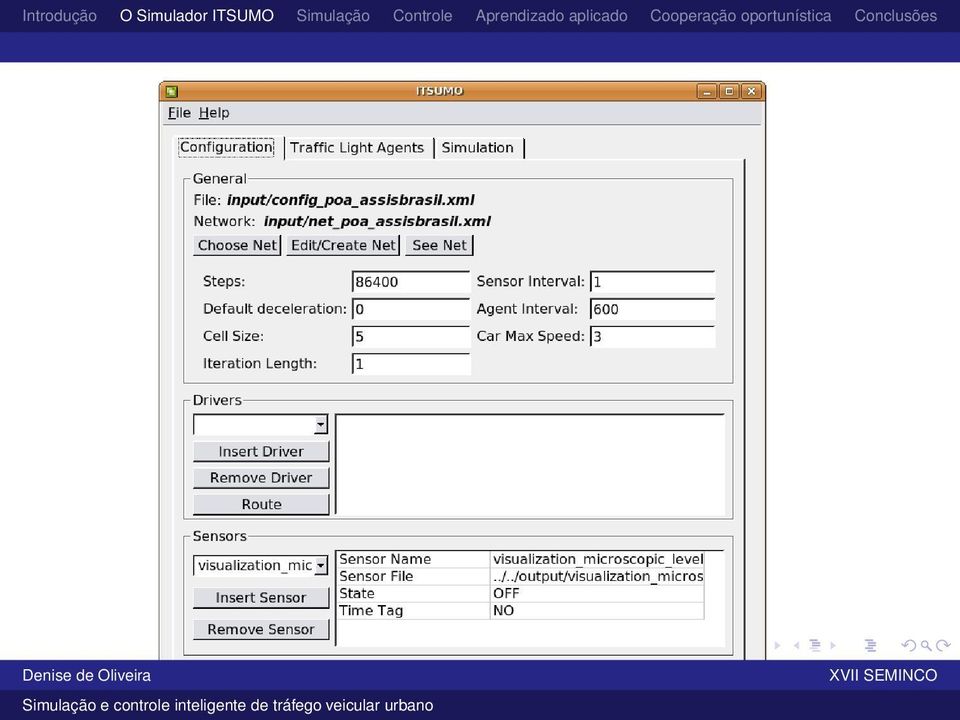
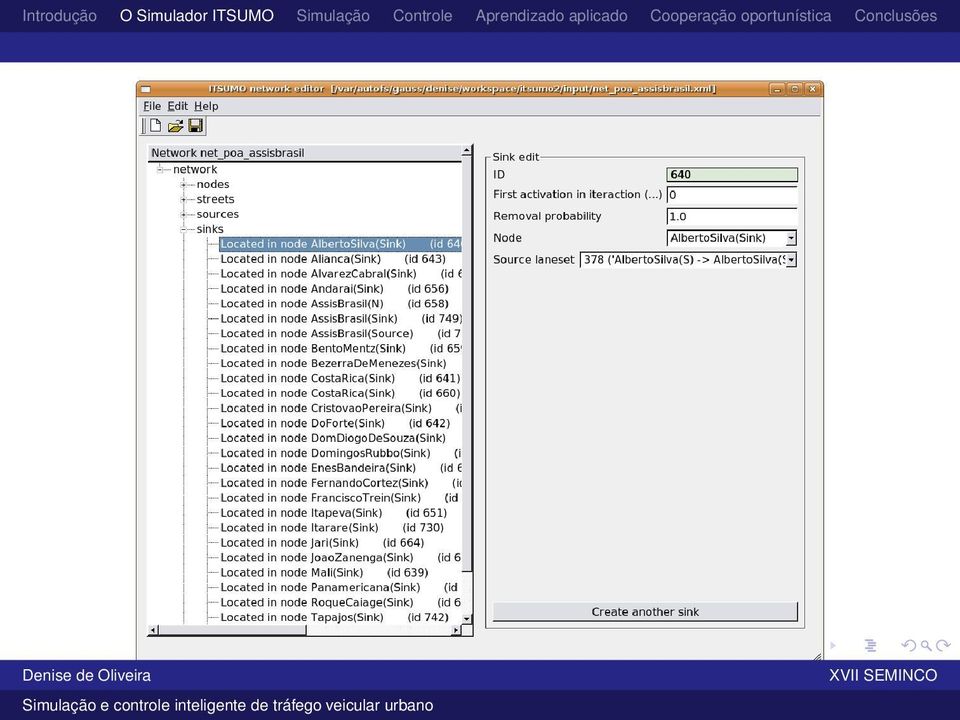
7 O Simulador ITSUMO ITSUMO Intelligent Transportation System for Urban Mobility

8 O Simulador ITSUMO ITSUMO Intelligent Transportation System for Urban Mobility Simulador microscópico de tráfego que utiliza o modelo de Nagel Schreckenberg para movimentação dos veículos (automato celular!);


9 O Simulador ITSUMO ITSUMO Intelligent Transportation System for Urban Mobility Simulador microscópico de tráfego que utiliza o modelo de Nagel Schreckenberg para movimentação dos veículos (automato celular!); As ruas são divididas em células de capacidade de 1 veículo:

10 O Simulador ITSUMO Regras de movimentação dos veículos: Regra I Aceleração: Se a velocidade v < v máxima e gap > v + 1, então ele deve acelerar (v v + 1); Regra II Desaceleração: Caso a distância até o próximo veículo seja inferior ou igual a sua velocidade, então o veículo deve reduzir sua velocidade (v gap); Regra III Aleatoriedade: cada veículo pode, com um probabilidade p, reduzir sua velocidade em uma unidade; Regra IV Movimentação: cada veículo avança v células.

11 O Simulador ITSUMO Os semáforos e motoristas podem ter comportamento controlado por módulos externos; O simulador utiliza o conceito de AGENTES ITSUMO Motoristas Especiais Controladores Semafóricos

12
13

14

15

16

17
18

19 Tráfego Avenida Assis Brasil Número elevado de semáforos Problemas de sinalização Via de acesso a municípios da região metropolitana Densidade constantemente elevada

20 Trecho Representado
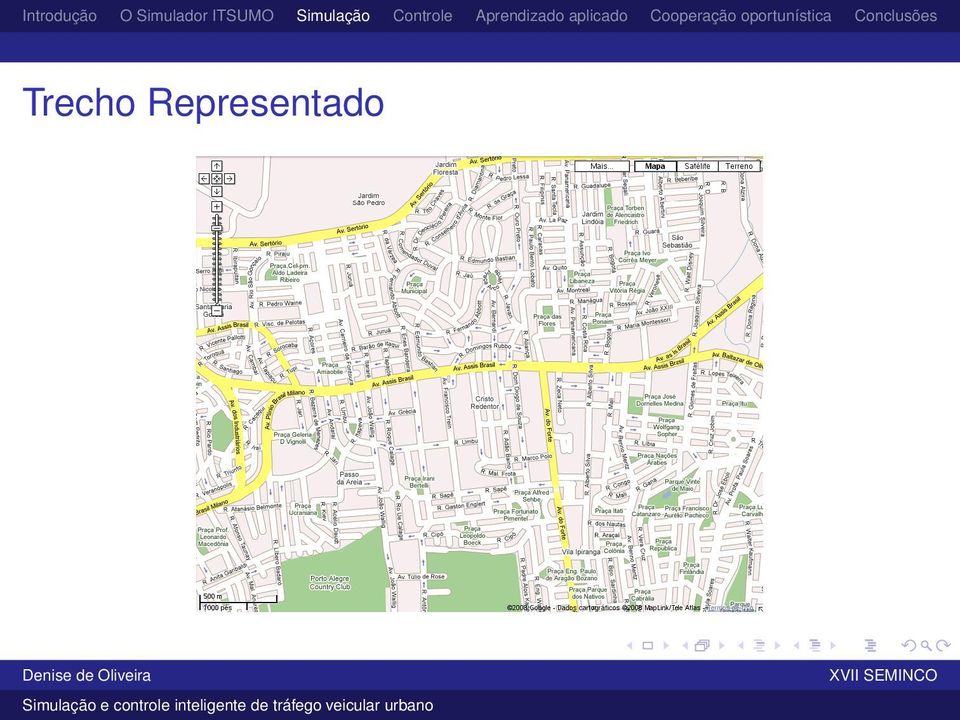
21 Trecho Representado
22 Parâmetros Utilizados Steps - 1 dia (00:00-07:00)H (07:00-09:00)H (09:00-11:30)H (11:30-13:30)H (13:30-17:00)H (17:00-20:00)H (20:00-24:00)H
23 (00:00-07:00)H - Probabilidade Variável: 0.05
24 (07:00-09:00)H - Probabilidade Variável: 0.40
25 (09:00-11:30)H - Probabilidade Variável: 0.10
26 (11:30-13:30)H - Probabilidade Variável: 0.20
27 (13:30-17:00)H - Probabilidade Variável: 0.10
28 (17:00-20:00)H - Probabilidade Variável: 0.40
29 (20:00-24:00)H - Probabilidade Variável: 0.05
30 Vídeo de demonstração do simulador
31 Porque aplicar Inteligência Artificial neste problema? A Inteligência Artificial visa a criação de soluções capazes de detectar e solucionar problemas de modo autônomo O Controle de Tráfego Veicular Urbano possui diversas características interessantes
32 Análise do Problema de controle de tráfego Característica Num. de agentes Agentes no time Planejamento Colab. emergente Tempo-Real Acesso a Info. Ambiente Controle Cooperação Tráfego 1 a muitos Hetero-/Homogêneo Envolvido Importante Seg. - Min. Muito Ruim/Boa Dinâmico Distribuído/Semi-Centralizado/Central Restrita
33 Aprendizado por Reforço O Agente aprenda partir de suas experiências: Recebe uma indicação de qualidade instantânea para cada decisão sinal de recompensa
34 Aprendizado por Reforço Algoritmos para aprendizado por reforço Dada a descrição de um mundo, aprendem como agir da maneira ótima lista de ações possíveis; indicação de qualidade de cada ação, em cada situação sinal de recompensa para cada ação, em cada estado Dando isso damos tempo para o agente praticar e aprender (tentativa-e-erro)!
35 Q-Learning Calcula a qualidade de estar em cada estado calcula um valor Q(s, a), para cada s e cada a o quão bom é fazer essa ação, nesse estado O agente percebe seu estado s, escolhe uma ação a e recebe a recompensa r Atualiza sua estimativa de Q para < s, a > ( ) Q(s, a) = (1 α)q(s, a) + α r + γ max Q(s, a ) a

36 Aprendizado por reforço Multiagente O agente busca resolver o problema enquanto outros agentes estão no ambiente tentando resolver seus problemas de aprendizado (sendo ou não relacionados)
37 Aprendizado multiagente aplicado ao controle Possibilidades de aplicação de aprendizado: Independente: considerando os demais semáforos parte do ambiente Cooperativo: modelando ações dos demais agentes e/ ou trocando informações
38 Aprendizado multiagente aplicado ao controle (cont.) Aprendizado multiagente: Ações conjuntas: conjunto de agentes que executam ações de modo coordenado. Reforço conjunto: todos os agentes recebem o mesmo valor de recompensa Reforço individual: cada ag. recebe uma recompensa local Problema: conflitos em relação a possíveis prioridades!
39 Aprendizado multiagente aplicado ao controle (cont.) Aprendizado independente: Considera somente uma visão local (Oliveira et al. 2006) Problemas: O ótimo local não é necessariamente o global Não há um objetivo de coordenação (ex: onda verde)
40 Aprendizado multiagente aplicado ao controle (cont.) Aprendizado multiagente: Formas de cooperação possíveis: troca de informações e ações conjuntas Troca de informação entre semáforos próximos assim a ação do agente depende do seu estado e do estado de alguns outros agentes (Oliveira and Bazzan 2009)
41 Aprendizado com cooperação oportunística Motivação: A maioria das abordagens existentes não trata as seguintes questões Número grande de agentes Grupos que mudam de modo dinâmico Ambientes dinâmicos Times heterogêneos
42 Objetivo Propor uma abordagem de aprendizado multi-agente onde: Não seja necessário conhecimento prévio dos estados coordenados
43 Objetivo Propor uma abordagem de aprendizado multi-agente onde: Não seja necessário conhecimento prévio dos estados coordenados Os agentes possam agir de modo independente em partes do ambiente
44 Objetivo Propor uma abordagem de aprendizado multi-agente onde: Não seja necessário conhecimento prévio dos estados coordenados Os agentes possam agir de modo independente em partes do ambiente As relações de inter-dependência são aprendidas de modo autônomo
45 Objetivo Propor uma abordagem de aprendizado multi-agente onde: Não seja necessário conhecimento prévio dos estados coordenados Ambientes dinâmicos Os agentes possam agir de modo independente em partes do ambiente As relações de inter-dependência são aprendidas de modo autônomo
46 Objetivo Propor uma abordagem de aprendizado multi-agente onde: Não seja necessário conhecimento prévio dos estados coordenados Ambientes dinâmicos Os agentes possam agir de modo independente em partes do ambiente Numero grande de agentes As relações de inter-dependência são aprendidas de modo autônomo
47 Objetivo Propor uma abordagem de aprendizado multi-agente onde: Não seja necessário conhecimento prévio dos estados coordenados Ambientes dinâmicos Os agentes possam agir de modo independente em partes do ambiente Numero grande de agentes As relações de inter-dependência são aprendidas de modo autônomo Times dinâmicos e heterogêneos
48 Modelo Proposto O agente inicia seu aprendizado utilizando um aprendizado pro reforço simples (mono-agente) Ao longo de sua execução ele vai montando uma tabela Q do seguinte modo: Avalia o resultado do par (estado,ação) quando for realizar uma próxima tarefa, caso encontre discrepâncias Se o estado é individual então busca a percepção de outro agente: Caso consiga receber a percepção, adiciona esse novo par estado (agora conjunto), ação a sua tabela... caso a avaliação de um par com estado aumentado apresente discrepâncias então parte para a busca por ação conjunta
49 Aprendizado dentro do domínio do tráfego Como ficariam as tabelas dinâmicas Q neste domínio? Estados: podem ser relativos ao tamanho das filas em cada direção, ou então na relacao entre as filas (ex: estado 1 = fila norte maior que as demais filas) Ações: planos semafóricos, sendo que as ações conjuntas as que formem "onda verde" ou priorizem algum sentido específico de tráfego
50 Aplicando a abordagem no controle de tráfego Em algumas situações de tráfego os agentes independentes podem ter um bom desempenho Uma percepção incompleta pode significar diferentes padrões de tráfego após a mesma tomada de decisão discrepância A área de comunicação pode ser definida como os agentes que estão ligados por alguma via
51 Resultados Preliminares do uso de troca de informações Planos não coordenados Planos coordenados
52 Conclusões Gerais O controle e simulação de tráfego veicular urbano é um problema desafiador para a computação; O simulador ITSUMO é uma plataforma livre de simulação de tráfego veicular; Diversas abordagens de controle e de rotas podem ser testadas com o uso de módulos externos.
53 Conclusões sobre o aprendizado Multi-agente Há uma necessidade de um método de aprendizado capaz de lidar com ambientes complexos onde os agentes tem uma percepção limitada do ambiente A abordagem proposta busca uma solução de compromisso entre o aprendizado mono-agente e o aprendizado multi-agente Podem ser criados mecanismos para restringir o crescimento da tabela Q (ex: limitação no tamanho dos grupos)
54 Referências: Oliveira and Bazzan 2009 Oliveira, D and Bazzan, A. L. C Multiagent Learning on Traffic Lights Control: effects of using shared information. Multi-Agent Systems for Traffic and Transportation. Oliveira et al Oliveira, D. and Bazzan, A. L. C. and Silva, B. C. and Basso, E. W. and Nunes, L. and Rossetti, R. J. F. and Oliveira, E. C. and Silva, R. and Lamb, L. C., Reinforcement learning based control of traffic lights in non-stationary environments: a case study in a microscopic simulator. Proceedings of the 4th European Workshop on Multi-Agent Systems, (EUMAS06). December
55 Obrigada! Simulação e controle inteligente de tráfego veicular urbano denise.oliveira@inf.ufrgs.br Mais informações:
Sistemas Inteligentes. Aula: Agentes Inteligentes Flávia Barros & Patricia Tedesco
 Sistemas Inteligentes Aula: Agentes Inteligentes Flávia Barros & Patricia Tedesco 1 Ao final desta aula a gente deve... Entender o que é um Agente Racional (inteligente)? Distinguir entre os vários tipos
Sistemas Inteligentes Aula: Agentes Inteligentes Flávia Barros & Patricia Tedesco 1 Ao final desta aula a gente deve... Entender o que é um Agente Racional (inteligente)? Distinguir entre os vários tipos
Interseções. Lastran/Ufrgs
 Interseções Lastran/Ufrgs 1 Noções Gerais Interseção é o local onde 2 ou mais vias se interceptam. Local de grande número de acidentes: 53% dos acidentes em vias rurais; 78% dos acidentes em vias urbanas;
Interseções Lastran/Ufrgs 1 Noções Gerais Interseção é o local onde 2 ou mais vias se interceptam. Local de grande número de acidentes: 53% dos acidentes em vias rurais; 78% dos acidentes em vias urbanas;
Inteligência Artificial. Agentes Inteligentes
 Inteligência Artificial Agentes Inteligentes Agentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. em busca de um objetivo Exemplos
Inteligência Artificial Agentes Inteligentes Agentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. em busca de um objetivo Exemplos
Trabalho 7 Fila de prioridade usando heap para simulação de atendimento
 Trabalho 7 Fila de prioridade usando heap para simulação de atendimento Data: 21/10/2013 até meia-noite Dúvidas até: 09/10/2013 Faq disponível em: http://www2.icmc.usp.br/~mello/trabalho07.html A estrutura
Trabalho 7 Fila de prioridade usando heap para simulação de atendimento Data: 21/10/2013 até meia-noite Dúvidas até: 09/10/2013 Faq disponível em: http://www2.icmc.usp.br/~mello/trabalho07.html A estrutura
Itinerários de Ônibus Relatório Final
 CENTRO UNIVERSITÁRIO SENAC Itinerários de Ônibus Relatório Final Grupo 5 Caio Roque Daniel Nunes Elise Roese José Caneiro Marcos Grignani São Paulo Junho de 2007 1 ÍNDICE 1. Introdução... 3 2. Desenvolvimento...
CENTRO UNIVERSITÁRIO SENAC Itinerários de Ônibus Relatório Final Grupo 5 Caio Roque Daniel Nunes Elise Roese José Caneiro Marcos Grignani São Paulo Junho de 2007 1 ÍNDICE 1. Introdução... 3 2. Desenvolvimento...
3 Estratégia para o enriquecimento de informações
 34 3 Estratégia para o enriquecimento de informações Podemos resumir o processo de enriquecimento de informações em duas grandes etapas, a saber, busca e incorporação de dados, como ilustrado na Figura
34 3 Estratégia para o enriquecimento de informações Podemos resumir o processo de enriquecimento de informações em duas grandes etapas, a saber, busca e incorporação de dados, como ilustrado na Figura
TEORIA DOS JOGOS E APRENDIZADO
 TEORIA DOS JOGOS E APRENDIZADO DE MÁQUINA Estudos Iniciais André Filipe de Moraes Batista Disciplina de Aprendizagem de Máquina UFABC 2010 TEORIA DOS JOGOS Ramo da matemática aplicada estuda situações
TEORIA DOS JOGOS E APRENDIZADO DE MÁQUINA Estudos Iniciais André Filipe de Moraes Batista Disciplina de Aprendizagem de Máquina UFABC 2010 TEORIA DOS JOGOS Ramo da matemática aplicada estuda situações
COS767 - Modelagem e Análise Aula 2 - Simulação. Algoritmo para simular uma fila Medidas de interesse
 COS767 - Modelagem e Análise Aula 2 - Simulação Algoritmo para simular uma fila Medidas de interesse Simulação O que é uma simulação? realização da evolução de um sistema estocástico no tempo Como caracterizar
COS767 - Modelagem e Análise Aula 2 - Simulação Algoritmo para simular uma fila Medidas de interesse Simulação O que é uma simulação? realização da evolução de um sistema estocástico no tempo Como caracterizar
Agentes Inteligentes. Inteligência Artificial. Exemplos. Agentes Inteligentes. Prof. Ms. Luiz Alberto Contato: lasf.bel@gmail.com
 Agentes Inteligentes Inteligência Artificial Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. Agente Prof. Ms. Luiz Alberto Contato:
Agentes Inteligentes Inteligência Artificial Um agente é algo capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por meio de atuadores. Agente Prof. Ms. Luiz Alberto Contato:
Capítulo 2. Processos de Software. 2011 Pearson Prentice Hall. Todos os direitos reservados. slide 1
 Capítulo 2 Processos de Software slide 1 Tópicos apresentados Modelos de processo de software. Atividades de processo. Lidando com mudanças. Rational Unified Process (RUP). Um exemplo de um processo de
Capítulo 2 Processos de Software slide 1 Tópicos apresentados Modelos de processo de software. Atividades de processo. Lidando com mudanças. Rational Unified Process (RUP). Um exemplo de um processo de
Roteiro SENAC. Análise de Riscos. Planejamento do Gerenciamento de Riscos. Planejamento do Gerenciamento de Riscos
 SENAC Pós-Graduação em Segurança da Informação: Análise de Riscos Parte 2 Leandro Loss, Dr. Eng. loss@gsigma.ufsc.br http://www.gsigma.ufsc.br/~loss Roteiro Introdução Conceitos básicos Riscos Tipos de
SENAC Pós-Graduação em Segurança da Informação: Análise de Riscos Parte 2 Leandro Loss, Dr. Eng. loss@gsigma.ufsc.br http://www.gsigma.ufsc.br/~loss Roteiro Introdução Conceitos básicos Riscos Tipos de
7 perguntas para fazer a qualquer fornecedor de automação de força de vendas
 7 perguntas para fazer a qualquer fornecedor de automação de força de vendas 1. O fornecedor é totalmente focado no desenvolvimento de soluções móveis? Por que devo perguntar isso? Buscando diversificar
7 perguntas para fazer a qualquer fornecedor de automação de força de vendas 1. O fornecedor é totalmente focado no desenvolvimento de soluções móveis? Por que devo perguntar isso? Buscando diversificar
natureza do projeto e da aplicação métodos e ferramentas a serem usados controles e produtos que precisam ser entregues
 Modelo De Desenvolvimento De Software É uma representação abstrata do processo de desenvolvimento que define como as etapas relativas ao desenvolvimento de software serão conduzidas e interrelacionadas
Modelo De Desenvolvimento De Software É uma representação abstrata do processo de desenvolvimento que define como as etapas relativas ao desenvolvimento de software serão conduzidas e interrelacionadas
Desenvolvimento de Estratégia para Programação do Futebol de Robôs da Mauá
 Desenvolvimento de Estratégia para Programação do Futebol de Robôs da Mauá Wânderson O. Assis, Alessandra D. Coelho, Marcelo M. Gomes, Cláudio G. Labate, Daniel F. Calasso, João Carlos G. C. Filho Escola
Desenvolvimento de Estratégia para Programação do Futebol de Robôs da Mauá Wânderson O. Assis, Alessandra D. Coelho, Marcelo M. Gomes, Cláudio G. Labate, Daniel F. Calasso, João Carlos G. C. Filho Escola
PROJETO DE COOPERAÇÃO TÉCNICA INTERNACIONAL. Projeto 914 BRA5065 - PRODOC-MTC/UNESCO DOCUMENTO TÉCNICO Nº 03
 PROJETO DE COOPERAÇÃO TÉCNICA INTERNACIONAL Diretrizes e Estratégias para Ciência, Tecnologia e Inovação no Brasil Projeto 914 BRA5065 - PRODOC-MTC/UNESCO DOCUMENTO TÉCNICO Nº 03 RELATÓRIO TÉCNICO CONCLUSIVO
PROJETO DE COOPERAÇÃO TÉCNICA INTERNACIONAL Diretrizes e Estratégias para Ciência, Tecnologia e Inovação no Brasil Projeto 914 BRA5065 - PRODOC-MTC/UNESCO DOCUMENTO TÉCNICO Nº 03 RELATÓRIO TÉCNICO CONCLUSIVO
SEI Superintendência de Estudos Econômicos e Sociais da Bahia Av Luiz Viana Filho, 435-4ª avenida, 2º andar CAB CEP 41.750-300 Salvador - Bahia Tel.
 SIDE Sistema de Dados Estatísticos AJUDA SEI Superintendência de Estudos Econômicos e Sociais da Bahia Av Luiz Viana Filho, 435-4ª avenida, 2º andar CAB CEP 41.750-300 Salvador - Bahia O QUE O NOSSO BANCO
SIDE Sistema de Dados Estatísticos AJUDA SEI Superintendência de Estudos Econômicos e Sociais da Bahia Av Luiz Viana Filho, 435-4ª avenida, 2º andar CAB CEP 41.750-300 Salvador - Bahia O QUE O NOSSO BANCO
FAESA@Online: Um ambiente para criação e manutenção de cursos a distância
 FAESA@Online: Um ambiente para criação e manutenção de cursos a distância Short paper Autores: Luciano Lessa Lorenzoni - Apresentador luciano@faesa.br 27-3279152 Denise Frazotti Togneri togneri@zaz.com.br
FAESA@Online: Um ambiente para criação e manutenção de cursos a distância Short paper Autores: Luciano Lessa Lorenzoni - Apresentador luciano@faesa.br 27-3279152 Denise Frazotti Togneri togneri@zaz.com.br
VAMOS PLANEJAR... As três palavras mágicas para um bom planejamento financeiro...
 FASCÍCULO IV VAMOS PLANEJAR... Se você ainda não iniciou seu planejamento financeiro, é importante fazê-lo agora, definindo muito bem seus objetivos, pois, independentemente da sua idade, nunca é cedo
FASCÍCULO IV VAMOS PLANEJAR... Se você ainda não iniciou seu planejamento financeiro, é importante fazê-lo agora, definindo muito bem seus objetivos, pois, independentemente da sua idade, nunca é cedo
AUDITORIA E LICENCIALMENTO AMBINETAL COMO INSTRUMENTOS DOS SISTEMAS DE MEIO AMBIENTE
 AUDITORIA E LICENCIALMENTO AMBINETAL COMO INSTRUMENTOS DOS SISTEMAS DE MEIO AMBIENTE NILVO LUIZ ALVES DA SILVA 1 1. INTRODUÇÃO O texto que segue aborda a auditoria ambiental da perspectiva do licenciamento
AUDITORIA E LICENCIALMENTO AMBINETAL COMO INSTRUMENTOS DOS SISTEMAS DE MEIO AMBIENTE NILVO LUIZ ALVES DA SILVA 1 1. INTRODUÇÃO O texto que segue aborda a auditoria ambiental da perspectiva do licenciamento
2 Engenharia de Software
 20 2 Engenharia de Software 2.1 Design de Sistemas Orientados a Objetos Os Sistemas Orientados a Objetos não são mais novidade hoje em dia já estando há muitos anos no mercado. A orientação a objetos permite
20 2 Engenharia de Software 2.1 Design de Sistemas Orientados a Objetos Os Sistemas Orientados a Objetos não são mais novidade hoje em dia já estando há muitos anos no mercado. A orientação a objetos permite
Urgência: Um Fator Crítico no Planejamento de Projetos
 Urgência: Um Fator Crítico no Planejamento de Projetos por Ricardo Vargas em Ricardo-Vargas.com Ricardo Diante da natural velocidade e do dinamismo do mundo, a agilidade e o senso de urgência têm se tornado
Urgência: Um Fator Crítico no Planejamento de Projetos por Ricardo Vargas em Ricardo-Vargas.com Ricardo Diante da natural velocidade e do dinamismo do mundo, a agilidade e o senso de urgência têm se tornado
Aula 2 Revisão 1. Ciclo de Vida. Processo de Desenvolvimento de SW. Processo de Desenvolvimento de SW. Processo de Desenvolvimento de SW
 Ciclo de Vida Aula 2 Revisão 1 Processo de Desenvolvimento de Software 1 O Processo de desenvolvimento de software é um conjunto de atividades, parcialmente ordenadas, com a finalidade de obter um produto
Ciclo de Vida Aula 2 Revisão 1 Processo de Desenvolvimento de Software 1 O Processo de desenvolvimento de software é um conjunto de atividades, parcialmente ordenadas, com a finalidade de obter um produto
17/5/2009. Esta área de conhecimento tem o objetivo de utilizar de forma mais efetiva as pessoas envolvidas no projeto (equipe e stakeholders)
") Gerenciamento de Recursos Humanos do Projeto FAE S. J. dos Pinhais Projeto e Desenvolvimento de Software Gerenciamento de Recursos Humanos Esta área de conhecimento tem o objetivo de utilizar de forma
Gerenciamento de Recursos Humanos do Projeto FAE S. J. dos Pinhais Projeto e Desenvolvimento de Software Gerenciamento de Recursos Humanos Esta área de conhecimento tem o objetivo de utilizar de forma
Planejamento - 7. Planejamento do Gerenciamento do Risco Identificação dos riscos. Mauricio Lyra, PMP
 Planejamento - 7 Planejamento do Gerenciamento do Risco Identificação dos riscos 1 O que é risco? Evento que representa uma ameaça ou uma oportunidade em potencial Plano de gerenciamento do risco Especifica
Planejamento - 7 Planejamento do Gerenciamento do Risco Identificação dos riscos 1 O que é risco? Evento que representa uma ameaça ou uma oportunidade em potencial Plano de gerenciamento do risco Especifica
3 Qualidade de Software
 3 Qualidade de Software Este capítulo tem como objetivo esclarecer conceitos relacionados à qualidade de software; conceitos estes muito importantes para o entendimento do presente trabalho, cujo objetivo
3 Qualidade de Software Este capítulo tem como objetivo esclarecer conceitos relacionados à qualidade de software; conceitos estes muito importantes para o entendimento do presente trabalho, cujo objetivo
Engenharia de Software e Gerência de Projetos Prof. Esp. André Luís Belini Bacharel em Sistemas de Informações MBA em Gestão Estratégica de Negócios
 Engenharia de Software e Gerência de Projetos Prof. Esp. André Luís Belini Bacharel em Sistemas de Informações MBA em Gestão Estratégica de Negócios Cronograma das Aulas. Hoje você está na aula Semana
Engenharia de Software e Gerência de Projetos Prof. Esp. André Luís Belini Bacharel em Sistemas de Informações MBA em Gestão Estratégica de Negócios Cronograma das Aulas. Hoje você está na aula Semana
TÉCNICAS DE PROGRAMAÇÃO
 TÉCNICAS DE PROGRAMAÇÃO (Adaptado do texto do prof. Adair Santa Catarina) ALGORITMOS COM QUALIDADE MÁXIMAS DE PROGRAMAÇÃO 1) Algoritmos devem ser feitos para serem lidos por seres humanos: Tenha em mente
TÉCNICAS DE PROGRAMAÇÃO (Adaptado do texto do prof. Adair Santa Catarina) ALGORITMOS COM QUALIDADE MÁXIMAS DE PROGRAMAÇÃO 1) Algoritmos devem ser feitos para serem lidos por seres humanos: Tenha em mente
Gerenciamento de Projeto: Planejando os Riscos. Prof. Msc Ricardo Britto DIE-UFPI rbritto@ufpi.edu.br
 Gerenciamento de Projeto: Planejando os Riscos Prof. Msc Ricardo Britto DIE-UFPI rbritto@ufpi.edu.br Sumário Introdução Planejar o Gerenciamento dos Riscos. Identificar os Riscos Realizar a Análise Qualitativa
Gerenciamento de Projeto: Planejando os Riscos Prof. Msc Ricardo Britto DIE-UFPI rbritto@ufpi.edu.br Sumário Introdução Planejar o Gerenciamento dos Riscos. Identificar os Riscos Realizar a Análise Qualitativa
Editores Colaborativos (Keepers)
") Agenda Editores Colaborativos (Keepers) Cleidson de Souza cdesouza@ufpa.br Dep. Informática Universidade Federal do Pará Definição Exemplos Exemplos de Artefatos e Sistemas Formas de Interação Editores
Agenda Editores Colaborativos (Keepers) Cleidson de Souza cdesouza@ufpa.br Dep. Informática Universidade Federal do Pará Definição Exemplos Exemplos de Artefatos e Sistemas Formas de Interação Editores
PROCESSOS DE CRIAÇÃO DE APLICATIVOS
 PROCESSOS DE CRIAÇÃO DE APLICATIVOS Joaldo de Carvalho Wesley Oliveira Irlei Rodrigo Ferraciolli da Silva Rodrigo Clemente Thom de Souza INTRODUÇÃO O mundo está dominado pelos dispositivos móveis. A cada
PROCESSOS DE CRIAÇÃO DE APLICATIVOS Joaldo de Carvalho Wesley Oliveira Irlei Rodrigo Ferraciolli da Silva Rodrigo Clemente Thom de Souza INTRODUÇÃO O mundo está dominado pelos dispositivos móveis. A cada
Gerenciamento de Projetos Modulo III Grupo de Processos
 Gerenciamento de Projetos Modulo III Grupo de Processos Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com Bibliografia* Project Management Institute. Conjunto de Conhecimentos em Gerenciamento
Gerenciamento de Projetos Modulo III Grupo de Processos Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com Bibliografia* Project Management Institute. Conjunto de Conhecimentos em Gerenciamento
mspeed (modelling and Simulation of Emergency Evacuation Dynamics) Modelo Dinâmico de Simulação Pedonal em Emergências
 Modelo Dinâmico de Simulação Pedonal em Emergências") mspeed (modelling and Simulation of Emergency Evacuation Dynamics) João Emílio Almeida (FEUP) Rosaldo J. F. Rossetti (FEUP) António Leça Coelho (LNEC) 1 Estrutura da apresentação Simulação e simuladores
mspeed (modelling and Simulation of Emergency Evacuation Dynamics) João Emílio Almeida (FEUP) Rosaldo J. F. Rossetti (FEUP) António Leça Coelho (LNEC) 1 Estrutura da apresentação Simulação e simuladores
ASPECTOS PRINCIPAIS SOBRE
 ASPECTOS PRINCIPAIS SOBRE EMPREENDEDORISMO Empreendedorismo A Administração da revolução O empreendedorismo é uma revolução silenciosa, que será para o século 21 mais do que a revolução industrial foi
ASPECTOS PRINCIPAIS SOBRE EMPREENDEDORISMO Empreendedorismo A Administração da revolução O empreendedorismo é uma revolução silenciosa, que será para o século 21 mais do que a revolução industrial foi
INF 1771 Inteligência Artificial
 Edirlei Soares de Lima INF 1771 Inteligência Artificial Aula 12 Aprendizado de Máquina Agentes Vistos Anteriormente Agentes baseados em busca: Busca cega Busca heurística Busca local
Edirlei Soares de Lima INF 1771 Inteligência Artificial Aula 12 Aprendizado de Máquina Agentes Vistos Anteriormente Agentes baseados em busca: Busca cega Busca heurística Busca local
Visualizador de Documentos Fiscais Eletrônicos FAQ (Perguntas frequentes)
") Visualizador de Documentos Fiscais Eletrônicos FAQ (Perguntas frequentes) 1. Quais são os requisitos de software para executar o Visualizador em meu computador? Para executar o Visualizador é necessário
Visualizador de Documentos Fiscais Eletrônicos FAQ (Perguntas frequentes) 1. Quais são os requisitos de software para executar o Visualizador em meu computador? Para executar o Visualizador é necessário
EMPREENDEDORISMO DANIELA FREIRE COUTINHO ROSANY SCARPATI RIGUETTI TECNOLÓGO EM GESTAO FINANCEIRA FACULDADE NOVO MILENIO
 EMPREENDEDORISMO DANIELA FREIRE COUTINHO ROSANY SCARPATI RIGUETTI TECNOLÓGO EM GESTAO FINANCEIRA FACULDADE NOVO MILENIO RESUMO: Este artigo contém citações de alguns dos mestres do empreendedorismo e também
EMPREENDEDORISMO DANIELA FREIRE COUTINHO ROSANY SCARPATI RIGUETTI TECNOLÓGO EM GESTAO FINANCEIRA FACULDADE NOVO MILENIO RESUMO: Este artigo contém citações de alguns dos mestres do empreendedorismo e também
Sistemas de Tempo Real: Conceitos Básicos
 Escola de Computação 2000 - IME-USP Sistemas de Tempo Real: Conceitos Básicos Jean-Marie Farines Joni da Silva Fraga Rômulo Silva de Oliveira LCMI - Laboratório de Controle e Microinformática DAS - Departamento
Escola de Computação 2000 - IME-USP Sistemas de Tempo Real: Conceitos Básicos Jean-Marie Farines Joni da Silva Fraga Rômulo Silva de Oliveira LCMI - Laboratório de Controle e Microinformática DAS - Departamento
Painel da Oficina de Custos slide 3 Painel da Oficina de Recursos Humanos
 Painel da Oficina de Custos slide 3 Painel da Oficina de Grupo 1 / Desmotivação slide 4 Grupo 2 / Papeis e Responsabilidades slide 5 Grupo 3 / slide 6 Grupo 4 slide 7 Grupo 5 slide 8 Grupo 6 slide 9 Grupo
Painel da Oficina de Custos slide 3 Painel da Oficina de Grupo 1 / Desmotivação slide 4 Grupo 2 / Papeis e Responsabilidades slide 5 Grupo 3 / slide 6 Grupo 4 slide 7 Grupo 5 slide 8 Grupo 6 slide 9 Grupo
Processos de Software
 Processos de Software Prof. Márcio Lopes Cornélio Slides originais elaborados por Ian Sommerville O autor permite o uso e a modificação dos slides para fins didáticos O processo de Um conjunto estruturado
Processos de Software Prof. Márcio Lopes Cornélio Slides originais elaborados por Ian Sommerville O autor permite o uso e a modificação dos slides para fins didáticos O processo de Um conjunto estruturado
ICMC USP São Carlos 24/03/2011
 ICMC USP São Carlos 24/03/2011 Matheus Ricardo Uihara Zingarelli 5377855 SCC5811 Fundamentos de Sistemas Hipermídia e Web To do 1 Pesquisar sobre os principais problemas com os sistemas lineares antigos
ICMC USP São Carlos 24/03/2011 Matheus Ricardo Uihara Zingarelli 5377855 SCC5811 Fundamentos de Sistemas Hipermídia e Web To do 1 Pesquisar sobre os principais problemas com os sistemas lineares antigos
Gerenciamento de Requisitos
 Gerenciamento de Requisitos Jaelson Castro 2013 1 Gerenciamento de requisitos Relaciona-se ao processo de gerenciar a mudança dos requisitos de um sistema As principais preocupações do gerenciamento de
Gerenciamento de Requisitos Jaelson Castro 2013 1 Gerenciamento de requisitos Relaciona-se ao processo de gerenciar a mudança dos requisitos de um sistema As principais preocupações do gerenciamento de
O mecanismo de alocação da CPU para execução de processos constitui a base dos sistemas operacionais multiprogramados.
 O mecanismo de alocação da CPU para execução de processos constitui a base dos sistemas operacionais multiprogramados. A multiprogramação tem como objetivo permitir que, a todo instante, haja algum processo
O mecanismo de alocação da CPU para execução de processos constitui a base dos sistemas operacionais multiprogramados. A multiprogramação tem como objetivo permitir que, a todo instante, haja algum processo
AGILIDADE ORGANIZACIONAL
 PMI PULSO DA PROFISSÃO RELATÓRIO DETALHADO AGILIDADE ORGANIZACIONAL Destaques do Estudo O lento crescimento econômico e as prioridades mutantes do mercado global criaram um ambiente de negócios complexo
PMI PULSO DA PROFISSÃO RELATÓRIO DETALHADO AGILIDADE ORGANIZACIONAL Destaques do Estudo O lento crescimento econômico e as prioridades mutantes do mercado global criaram um ambiente de negócios complexo
Autoria:Aristófanes Corrêa Silva Adaptação: Alexandre César M de Oliveira
 Unified Modeling Language (UML) Universidade Federal do Maranhão UFMA Pós Graduação de Engenharia de Eletricidade Grupo de Computação Assunto: Introdução Autoria:Aristófanes Corrêa Silva Adaptação: Alexandre
Unified Modeling Language (UML) Universidade Federal do Maranhão UFMA Pós Graduação de Engenharia de Eletricidade Grupo de Computação Assunto: Introdução Autoria:Aristófanes Corrêa Silva Adaptação: Alexandre
6.1 A Simulação Empresarial tem utilização em larga escala nos cursos de Administração, em seus diversos níveis de ensino no Brasil?
 195 6 Discussão Neste capítulo, são discutidos os resultados apresentados nas suas unidades de pesquisa e a relação existente entre cada uma dessas unidades. Assim, este capítulo traz subsídios para a
195 6 Discussão Neste capítulo, são discutidos os resultados apresentados nas suas unidades de pesquisa e a relação existente entre cada uma dessas unidades. Assim, este capítulo traz subsídios para a
IMPLEMENTAÇÃO DE UM PROTÓTIPO PARA INFORMATIZAÇÃO DE PROCESSO DE ADEQUAÇÃO DE FÉRIAS
 1 IMPLEMENTAÇÃO DE UM PROTÓTIPO PARA INFORMATIZAÇÃO DE PROCESSO DE ADEQUAÇÃO DE FÉRIAS Autor: Petrus Adriano Neto* petrusneto@yahoo.com.br RESUMO: A informatização das empresas é um caminho sem volta na
1 IMPLEMENTAÇÃO DE UM PROTÓTIPO PARA INFORMATIZAÇÃO DE PROCESSO DE ADEQUAÇÃO DE FÉRIAS Autor: Petrus Adriano Neto* petrusneto@yahoo.com.br RESUMO: A informatização das empresas é um caminho sem volta na
5 Considerações finais
 5 Considerações finais 5.1. Conclusões A presente dissertação teve o objetivo principal de investigar a visão dos alunos que se formam em Administração sobre RSC e o seu ensino. Para alcançar esse objetivo,
5 Considerações finais 5.1. Conclusões A presente dissertação teve o objetivo principal de investigar a visão dos alunos que se formam em Administração sobre RSC e o seu ensino. Para alcançar esse objetivo,
Cartilha do ALUNO EMPREENDEDOR POLITÉCNICA
 1 Cartilha do ALUNO EMPREENDEDOR POLITÉCNICA Diretor Acadêmico: Edison de Mello Gestor do Projeto: Prof. Marco Antonio da Costa 2 1. APRESENTAÇÃO Prepare seus alunos para explorarem o desconhecido, para
1 Cartilha do ALUNO EMPREENDEDOR POLITÉCNICA Diretor Acadêmico: Edison de Mello Gestor do Projeto: Prof. Marco Antonio da Costa 2 1. APRESENTAÇÃO Prepare seus alunos para explorarem o desconhecido, para
ALGORITMOS E FLUXOGRAMAS
 ALGORITMOS E FLUXOGRAMAS Prof. André Backes INTRODUÇÃO Computadores = cérebros eletrônicos? Computadores são máquinas e, por si sós, não podem ser inteligentes. Alguém as projetou e deu a ela todas as
ALGORITMOS E FLUXOGRAMAS Prof. André Backes INTRODUÇÃO Computadores = cérebros eletrônicos? Computadores são máquinas e, por si sós, não podem ser inteligentes. Alguém as projetou e deu a ela todas as
2 Fundamentação Conceitual
 2 Fundamentação Conceitual 2.1 Computação Pervasiva Mark Weiser define pela primeira vez o termo Computação Ubíqua ou Computação Pervasiva (Ubiquitous Computing) em (10). O autor inicia o trabalho com
2 Fundamentação Conceitual 2.1 Computação Pervasiva Mark Weiser define pela primeira vez o termo Computação Ubíqua ou Computação Pervasiva (Ubiquitous Computing) em (10). O autor inicia o trabalho com
Programação Extrema. Luis Fernando Machado. Engenharia de Software
 Programação Extrema Luis Fernando Machado Engenharia de Software Desenvolvimento Ágil Programação Extrema, ou Extreme Programming (XP) é um modelo de desenvolvimento ágil. Desenvolvimento ágil foi criado
Programação Extrema Luis Fernando Machado Engenharia de Software Desenvolvimento Ágil Programação Extrema, ou Extreme Programming (XP) é um modelo de desenvolvimento ágil. Desenvolvimento ágil foi criado
2 Trabalhos relacionados
 2 Trabalhos relacionados Esta seção descreve os principais trabalhos relacionados ao framework aqui produzido. Uma discussão sobre os aspectos gerais de jogos está fora dos objetivos deste dissertação.
2 Trabalhos relacionados Esta seção descreve os principais trabalhos relacionados ao framework aqui produzido. Uma discussão sobre os aspectos gerais de jogos está fora dos objetivos deste dissertação.
Gerenciamento de Projetos Modulo VIII Riscos
 Gerenciamento de Projetos Modulo VIII Riscos Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com Bibliografia* Project Management Institute. Conjunto de Conhecimentos em Gerenciamento
Gerenciamento de Projetos Modulo VIII Riscos Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com Bibliografia* Project Management Institute. Conjunto de Conhecimentos em Gerenciamento
Curso: Diagnóstico Comunitário Participativo.
 Curso: Diagnóstico Comunitário Participativo. Material referente ao texto do Módulo 3: Ações Básicas de Mobilização. O conhecimento da realidade é a base fundamental ao desenvolvimento social, que visa
Curso: Diagnóstico Comunitário Participativo. Material referente ao texto do Módulo 3: Ações Básicas de Mobilização. O conhecimento da realidade é a base fundamental ao desenvolvimento social, que visa
3.1 Definições Uma classe é a descrição de um tipo de objeto.
 Unified Modeling Language (UML) Universidade Federal do Maranhão UFMA Pós Graduação de Engenharia de Eletricidade Grupo de Computação Assunto: Diagrama de Classes Autoria:Aristófanes Corrêa Silva Adaptação:
Unified Modeling Language (UML) Universidade Federal do Maranhão UFMA Pós Graduação de Engenharia de Eletricidade Grupo de Computação Assunto: Diagrama de Classes Autoria:Aristófanes Corrêa Silva Adaptação:
5.1 Modelo de uma rede óptica com conversores de comprimento de onda
 5 Trabalho Realizado Na seção 2.3, estabeleceu-se que uma das alternativas sub-ótimas de alocação de conversores de comprimento de onda em redes parciais é fazer uso de simulações para gerar estatísticas
5 Trabalho Realizado Na seção 2.3, estabeleceu-se que uma das alternativas sub-ótimas de alocação de conversores de comprimento de onda em redes parciais é fazer uso de simulações para gerar estatísticas
UNEMAT SISTEMA DE INFORMAÇÃO (SI) Professora: Priscila Pelegrini priscila_pelegrini@unemat-net.br
 Professora: Priscila Pelegrini priscila_pelegrini@unemat-net.br") UNEMAT SISTEMA DE INFORMAÇÃO (SI) Professora: Priscila Pelegrini priscila_pelegrini@unemat-net.br SINOP MT 2015-1 COMO SÃO DESENVOLVIDOS OS SISTEMAS DE INFORMAÇÃO? São desenvolvimento como uma estrutura
UNEMAT SISTEMA DE INFORMAÇÃO (SI) Professora: Priscila Pelegrini priscila_pelegrini@unemat-net.br SINOP MT 2015-1 COMO SÃO DESENVOLVIDOS OS SISTEMAS DE INFORMAÇÃO? São desenvolvimento como uma estrutura
PLANO DE GERÊNCIAMENTO DE RISCOS
 1 PLANO DE GERÊNCIAMENTO DE RISCOS Versão 1.1 Rua Pedro Ribeiro, 85 - Matriz, Vitória de Santo Antão - PE, 55612-275 Pernambuco Brasil (81) 3523-0012 www.qualistec.com.br suporte@qualistec.com.br 2 Histórico
1 PLANO DE GERÊNCIAMENTO DE RISCOS Versão 1.1 Rua Pedro Ribeiro, 85 - Matriz, Vitória de Santo Antão - PE, 55612-275 Pernambuco Brasil (81) 3523-0012 www.qualistec.com.br suporte@qualistec.com.br 2 Histórico
Aumente o valor do ciclo de vida de cada cliente
 Engajamento com o Cliente Gerenciamento de Ciclo de Vida do Cliente Informativo Torne cada interação relevante e envolvente Aumente o valor do ciclo de vida de cada cliente Gerenciamento do ciclo de vida
Engajamento com o Cliente Gerenciamento de Ciclo de Vida do Cliente Informativo Torne cada interação relevante e envolvente Aumente o valor do ciclo de vida de cada cliente Gerenciamento do ciclo de vida
ESTUDO DE CASO: LeCS: Ensino a Distância
 ESTUDO DE CASO: LeCS: Ensino a Distância HERMOSILLA, Lígia Docente da Faculdade de Ciências Jurídicas e Gerenciais de Garça FAEG - Labienópolis - CEP 17400-000 Garça (SP) Brasil Telefone (14) 3407-8000
ESTUDO DE CASO: LeCS: Ensino a Distância HERMOSILLA, Lígia Docente da Faculdade de Ciências Jurídicas e Gerenciais de Garça FAEG - Labienópolis - CEP 17400-000 Garça (SP) Brasil Telefone (14) 3407-8000
Relatório referente ao período de 24 de abril de 2007 a 29 de maio de 2007.
 Relatório do GPES Relatório referente ao período de 24 de abril de 2007 a 29 de maio de 2007. Objetivo O objetivo desse relatório é expor alguns padrões de interface para Web que foram definidos pela Coleção
Relatório do GPES Relatório referente ao período de 24 de abril de 2007 a 29 de maio de 2007. Objetivo O objetivo desse relatório é expor alguns padrões de interface para Web que foram definidos pela Coleção
PROPOSTAS MOBILIDADE PROPOSTAS DE MÉDIO E LONGO PRAZO
 PROPOSTAS MOBILIDADE PROPOSTAS DE MÉDIO E LONGO PRAZO AGENDA DO DEBATE: Pedestres Bicicleta Transporte público: ônibus e trilhos Circulação viária carros, motos e caminhões Acessibilidade Educação e trânsito
PROPOSTAS MOBILIDADE PROPOSTAS DE MÉDIO E LONGO PRAZO AGENDA DO DEBATE: Pedestres Bicicleta Transporte público: ônibus e trilhos Circulação viária carros, motos e caminhões Acessibilidade Educação e trânsito
C5. Formação e evolução estelar
 AST434: C5-1/68 AST434: Planetas e Estrelas C5. Formação e evolução estelar Mário João P. F. G. Monteiro Mestrado em Desenvolvimento Curricular pela Astronomia Mestrado em Física e Química em Contexto
AST434: C5-1/68 AST434: Planetas e Estrelas C5. Formação e evolução estelar Mário João P. F. G. Monteiro Mestrado em Desenvolvimento Curricular pela Astronomia Mestrado em Física e Química em Contexto
Soma. Paulo Roberto Guimarães Junior
 Soma Paulo Roberto Guimarães Junior Observatório Nacional de Segurança Viária. Rua 9 de Julho, 1953 - Vila Georgina - Cep: 13.333-070 - Indaiatuba SP Telefone: (19) 3801.4500 E-mail: onsv@onsv.org.br SÍNTESE
Soma Paulo Roberto Guimarães Junior Observatório Nacional de Segurança Viária. Rua 9 de Julho, 1953 - Vila Georgina - Cep: 13.333-070 - Indaiatuba SP Telefone: (19) 3801.4500 E-mail: onsv@onsv.org.br SÍNTESE
Uso da Telefonia Móvel: Uma Ferramenta de Interação para a Aprendizagem a Distância
 1 Uso da Telefonia Móvel: Uma Ferramenta de Interação para a Aprendizagem a Distância 05/2008 Maria de Fátima Rodrigues de Lemos Núcleo de Educação a Distância - NEAD / Unidade Estratégica de Desenvolvimento
1 Uso da Telefonia Móvel: Uma Ferramenta de Interação para a Aprendizagem a Distância 05/2008 Maria de Fátima Rodrigues de Lemos Núcleo de Educação a Distância - NEAD / Unidade Estratégica de Desenvolvimento
INTELIGÊNCIA ARTIFICIAL
 INTELIGÊNCIA ARTIFICIAL 1 Ramo da computação que procura permitir uma máquina simular comportamento inteligente, através de algoritmos e técnicas que simulem situações consideradas específicamente humanas,
INTELIGÊNCIA ARTIFICIAL 1 Ramo da computação que procura permitir uma máquina simular comportamento inteligente, através de algoritmos e técnicas que simulem situações consideradas específicamente humanas,
Processos de Gerenciamento de Projetos. Planejamento e Controle de Projetos 5 TADS FSR. Processos
 Processos de Gerenciamento de Projetos Planejamento e Controle de Projetos 5 TADS FSR Prof. Esp. André Luís Belini 2 Processos O gerenciamento de projetos é a aplicação de conhecimento, habilidades, ferramentas
Processos de Gerenciamento de Projetos Planejamento e Controle de Projetos 5 TADS FSR Prof. Esp. André Luís Belini 2 Processos O gerenciamento de projetos é a aplicação de conhecimento, habilidades, ferramentas
3 Previsão da demanda
 42 3 Previsão da demanda Este capítulo estuda o processo de previsão da demanda através de métodos quantitativos, assim como estuda algumas medidas de erro de previsão. Num processo de previsão de demanda,
42 3 Previsão da demanda Este capítulo estuda o processo de previsão da demanda através de métodos quantitativos, assim como estuda algumas medidas de erro de previsão. Num processo de previsão de demanda,
Estudo de Casos 57. 5.1. Estudo de Caso 1: Velocidade Intervalar e Espessura da Camada
 Estudo de Casos 57 5 Estudo de Casos Neste capítulo são relatados três estudos de caso com sismogramas de referência sintéticos que têm como objetivo avaliar o modelo proposto. Na descrição dos estudos
Estudo de Casos 57 5 Estudo de Casos Neste capítulo são relatados três estudos de caso com sismogramas de referência sintéticos que têm como objetivo avaliar o modelo proposto. Na descrição dos estudos
UNIVERSIDADE DE SÃO PAULO INSTITUTO DE FÍSICA USO DE JOGOS ELETRÔNICOS NA ESCOLA: A FÍSICA DE ANGRY BIRDS
 UNIVERSIDADE DE SÃO PAULO INSTITUTO DE FÍSICA USO DE JOGOS ELETRÔNICOS NA ESCOLA: A FÍSICA DE ANGRY BIRDS LUCAS MORAES DOS SANTOS Projeto para Monografia de Fim de Curso Curso de Licenciatura em Física
UNIVERSIDADE DE SÃO PAULO INSTITUTO DE FÍSICA USO DE JOGOS ELETRÔNICOS NA ESCOLA: A FÍSICA DE ANGRY BIRDS LUCAS MORAES DOS SANTOS Projeto para Monografia de Fim de Curso Curso de Licenciatura em Física
DAS6607 - Inteligência Artificial Aplicada à Controle de Processos e Automação Industrial
 DAS6607 - Inteligência Artificial Aplicada à Controle de Processos e Automação Industrial Aluno: André Faria Ruaro Professores: Jomi F. Hubner e Ricardo J. Rabelo 29/11/2013 1. Introdução e Motivação 2.
DAS6607 - Inteligência Artificial Aplicada à Controle de Processos e Automação Industrial Aluno: André Faria Ruaro Professores: Jomi F. Hubner e Ricardo J. Rabelo 29/11/2013 1. Introdução e Motivação 2.
Copyright 2012 1. Innoscience. Artigo publicado no Blog de Inovação 3M, em 24 de maio de 2012
 Artigo Os primeiros 90 dias do CEO Inovador Parte I Por Maximiliano Carlomagno 1 Copyright 2012 1. Innoscience Artigo publicado no Blog de Inovação 3M, em 24 de maio de 2012 2 Os primeiros 90 dias do CEO
Artigo Os primeiros 90 dias do CEO Inovador Parte I Por Maximiliano Carlomagno 1 Copyright 2012 1. Innoscience Artigo publicado no Blog de Inovação 3M, em 24 de maio de 2012 2 Os primeiros 90 dias do CEO
PROBLEMA DE ROTEAMENTO DE VEÍCULOS COM JANELA DE TEMPO
 PROBLEMA DE ROTEAMENTO DE VEÍCULOS COM JANELA DE TEMPO UNIFAL - MG UFMG Edgar Fonseca FRANCO Jr. (Orientado) Flávio Alves de CARVALHO (Orientado) Humberto C. B. de OLIVEIRA (Orientador) Humberto C. B.
PROBLEMA DE ROTEAMENTO DE VEÍCULOS COM JANELA DE TEMPO UNIFAL - MG UFMG Edgar Fonseca FRANCO Jr. (Orientado) Flávio Alves de CARVALHO (Orientado) Humberto C. B. de OLIVEIRA (Orientador) Humberto C. B.
Liderança eficaz. Palavras-chaves: líder, liderança, princípios, influência. 1 Introdução
 Liderança eficaz Thaís Reis Sallum PMP Arquiteta e Urbanista/ Pós-graduada em Engenheira de Segurança do Trabalho tsallum@terra.com.br Este artigo tem como objetivo apresentar alguns princípios da liderança
Liderança eficaz Thaís Reis Sallum PMP Arquiteta e Urbanista/ Pós-graduada em Engenheira de Segurança do Trabalho tsallum@terra.com.br Este artigo tem como objetivo apresentar alguns princípios da liderança
Metodologia de Desenvolvimento de Software. Prof. M.Sc. Sílvio Bacalá Jr
 Metodologia de Desenvolvimento de Software Prof. M.Sc. Sílvio Bacalá Jr Objetivos Discutir aspectos de Engenharia de Software Aplicar um método de desenvolvimento para especificação e projeto de software
Metodologia de Desenvolvimento de Software Prof. M.Sc. Sílvio Bacalá Jr Objetivos Discutir aspectos de Engenharia de Software Aplicar um método de desenvolvimento para especificação e projeto de software
QUESTIONÁRIO DE AVALIAÇÃO DE NECESSIDADES DE FORMAÇÃO EM ESTABELECIMENTOS PRISIONAIS
 QUESTIONÁRIO DE AVALIAÇÃO DE NECESSIDADES DE FORMAÇÃO EM ESTABELECIMENTOS PRISIONAIS Dados sócio-demográficos: Género: F M Idade:... (anos) Escolaridade: Ensino Secundário Licenciatura Mestrado Doutoramento
QUESTIONÁRIO DE AVALIAÇÃO DE NECESSIDADES DE FORMAÇÃO EM ESTABELECIMENTOS PRISIONAIS Dados sócio-demográficos: Género: F M Idade:... (anos) Escolaridade: Ensino Secundário Licenciatura Mestrado Doutoramento
Auditoria e Segurança de Sistemas. Prof.: Mauricio Pitangueira Instituto Federal da Bahia
 Auditoria e Segurança de Sistemas Prof.: Mauricio Pitangueira Instituto Federal da Bahia 1 A Organização da Segurança Modelo de Gestão Coporativa de Segurança o Para a criação de um modelo de segurança
Auditoria e Segurança de Sistemas Prof.: Mauricio Pitangueira Instituto Federal da Bahia 1 A Organização da Segurança Modelo de Gestão Coporativa de Segurança o Para a criação de um modelo de segurança
F.1 Gerenciamento da integração do projeto
 Transcrição do Anexo F do PMBOK 4ª Edição Resumo das Áreas de Conhecimento em Gerenciamento de Projetos F.1 Gerenciamento da integração do projeto O gerenciamento da integração do projeto inclui os processos
Transcrição do Anexo F do PMBOK 4ª Edição Resumo das Áreas de Conhecimento em Gerenciamento de Projetos F.1 Gerenciamento da integração do projeto O gerenciamento da integração do projeto inclui os processos
Universidade Estadual de Londrina/Departamento de Ciência da Informação/Londrina, PR.
 1 A RELAÇÃO ENTRE A COMPETÊNCIA INFORMACIONAL E A APRENDIZAGEM NO ENSINO SUPERIOR Poline Fernandes Thomaz 1 ; Linete Bartalo 2 (Orientadora), e-mail: linete@uel.br. Universidade Estadual de Londrina/Departamento
1 A RELAÇÃO ENTRE A COMPETÊNCIA INFORMACIONAL E A APRENDIZAGEM NO ENSINO SUPERIOR Poline Fernandes Thomaz 1 ; Linete Bartalo 2 (Orientadora), e-mail: linete@uel.br. Universidade Estadual de Londrina/Departamento
ADMINISTRAÇÃO GERAL GESTÃO DO DESEMPENHO
 ADMINISTRAÇÃO GERAL GESTÃO DO DESEMPENHO Atualizado em 30/12/2015 GESTÃO DE DESEMPENHO A gestão do desempenho constitui um sistemático de ações que buscam definir o conjunto de resultados a serem alcançados
ADMINISTRAÇÃO GERAL GESTÃO DO DESEMPENHO Atualizado em 30/12/2015 GESTÃO DE DESEMPENHO A gestão do desempenho constitui um sistemático de ações que buscam definir o conjunto de resultados a serem alcançados
MODELIX SYSTEM SOFTWARE DE PROGRAMAÇÃO DE ROBÔS
 MODELIX SYSTEM SOFTWARE DE PROGRAMAÇÃO DE ROBÔS A Modelix Robotics é pioneira dentre as empresas nacionais no segmento de robótica educacional (uso acadêmico e educação tecnológica) e robótica para usuário
MODELIX SYSTEM SOFTWARE DE PROGRAMAÇÃO DE ROBÔS A Modelix Robotics é pioneira dentre as empresas nacionais no segmento de robótica educacional (uso acadêmico e educação tecnológica) e robótica para usuário
Ingersoll Rand. Sistema de Automação Série-X
 Ingersoll Rand Sistema de Automação Série- Economia de Energia Por Encomenda! Ingersoll Rand 20% a 60% da energia utilizada para operar os sistemas de ar comprimido são desperdiçados. Isso ocorre principalmente
Ingersoll Rand Sistema de Automação Série- Economia de Energia Por Encomenda! Ingersoll Rand 20% a 60% da energia utilizada para operar os sistemas de ar comprimido são desperdiçados. Isso ocorre principalmente
Objetivos. Discutir as novas tendências de mercado; Ampliar a visão de Gestão; Compreender os múltiplos papéis do Gestor;
 Gestão de Pessoas Objetivos Discutir as novas tendências de mercado; Ampliar a visão de Gestão; Compreender os múltiplos papéis do Gestor; Discernir sobre os efeitos e benefícios da comunicação; Fomentar
Gestão de Pessoas Objetivos Discutir as novas tendências de mercado; Ampliar a visão de Gestão; Compreender os múltiplos papéis do Gestor; Discernir sobre os efeitos e benefícios da comunicação; Fomentar
Profa. Dra. Ana Paula Gonçalves Serra prof.anapaula@saojudas.br
 Modelos de Processo Pessoal e de Equipe na Melhoria da Qualidade em Produção de Software Profa. Dra. Ana Paula Gonçalves Serra prof.anapaula@saojudas.br Agenda Importância das Pessoas / Constatações Compromisso
Modelos de Processo Pessoal e de Equipe na Melhoria da Qualidade em Produção de Software Profa. Dra. Ana Paula Gonçalves Serra prof.anapaula@saojudas.br Agenda Importância das Pessoas / Constatações Compromisso
ADMINISTRAÇÃO GERAL MOTIVAÇÃO
 ADMINISTRAÇÃO GERAL MOTIVAÇÃO Atualizado em 11/01/2016 MOTIVAÇÃO Estar motivado é visto como uma condição necessária para que um trabalhador entregue um desempenho superior. Naturalmente, como a motivação
ADMINISTRAÇÃO GERAL MOTIVAÇÃO Atualizado em 11/01/2016 MOTIVAÇÃO Estar motivado é visto como uma condição necessária para que um trabalhador entregue um desempenho superior. Naturalmente, como a motivação
ATIVIDADES PRÁTICAS SUPERVISIONADAS
 ATIVIDADES PRÁTICAS SUPERVISIONADAS 1ª Série Empreendedorismo Administração A Atividade Prática Supervisionada (ATPS) é um procedimento metodológico de ensino-aprendizagem desenvolvido por meio de etapas,
ATIVIDADES PRÁTICAS SUPERVISIONADAS 1ª Série Empreendedorismo Administração A Atividade Prática Supervisionada (ATPS) é um procedimento metodológico de ensino-aprendizagem desenvolvido por meio de etapas,
PROGRAMA DINÂMICA DE METAS 2010 RELATÓRIO FINAL
 PROGRAMA DINÂMICA DE METAS 2010 RELATÓRIO FINAL PROGRAMA DINÂMICA DE METAS 2010 RELATÓRIO FINAL INTRODUÇÃO METODOLOGIA RESULTADO CONCLUSÃO INTRODUÇÃO O Poder Judiciário passa por um largo processo de reformulação
PROGRAMA DINÂMICA DE METAS 2010 RELATÓRIO FINAL PROGRAMA DINÂMICA DE METAS 2010 RELATÓRIO FINAL INTRODUÇÃO METODOLOGIA RESULTADO CONCLUSÃO INTRODUÇÃO O Poder Judiciário passa por um largo processo de reformulação
PMBOK 4ª Edição III. O padrão de gerenciamento de projetos de um projeto
 PMBOK 4ª Edição III O padrão de gerenciamento de projetos de um projeto 1 PMBOK 4ª Edição III Processos de gerenciamento de projetos de um projeto 2 Processos de gerenciamento de projetos de um projeto
PMBOK 4ª Edição III O padrão de gerenciamento de projetos de um projeto 1 PMBOK 4ª Edição III Processos de gerenciamento de projetos de um projeto 2 Processos de gerenciamento de projetos de um projeto
Projeto de Sistemas I
 Instituto Federal de Educação, Ciência e Tecnologia de São Paulo Projeto de Sistemas I Professora: Kelly de Paula Cunha E-mail:kellypcsoares@ifsp.edu.br Requisitos: base para todo projeto, definindo o
Instituto Federal de Educação, Ciência e Tecnologia de São Paulo Projeto de Sistemas I Professora: Kelly de Paula Cunha E-mail:kellypcsoares@ifsp.edu.br Requisitos: base para todo projeto, definindo o
Administração da Produção I
 Administração da Produção I Manutenção Manutenção Manutenção: Termo usado para abordar a forma pela qual organizações tentam evitar as falhas cuidando de suas instalações físicas. É uma parte importante
Administração da Produção I Manutenção Manutenção Manutenção: Termo usado para abordar a forma pela qual organizações tentam evitar as falhas cuidando de suas instalações físicas. É uma parte importante
UTILIZAÇÃO DO SOFTWARE TRANUS COMO APOIO À ENGENHARIA DE TRÁFEGO E TRANSPORTE URBANO
 UTILIZAÇÃO DO SOFTWARE TRANUS COMO APOIO À ENGENHARIA DE TRÁFEGO E TRANSPORTE URBANO 1. INTRODUÇÃO Atualmente a tecnologia vem se desenvolvendo cada vez mais rápido para suprir as necessidades da população.
UTILIZAÇÃO DO SOFTWARE TRANUS COMO APOIO À ENGENHARIA DE TRÁFEGO E TRANSPORTE URBANO 1. INTRODUÇÃO Atualmente a tecnologia vem se desenvolvendo cada vez mais rápido para suprir as necessidades da população.
INF 1771 Inteligência Artificial
 Edirlei Soares de Lima INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
Edirlei Soares de Lima INF 1771 Inteligência Artificial Aula 02 Agentes Inteligentes Agentes Inteligentes Um agente é algo capaz de perceber seu ambiente por meio de sensores e de
Política de Formação da SEDUC. A escola como lócus da formação
 Política de Formação da SEDUC A escola como lócus da formação A qualidade da aprendizagem como objetivo estratégico A qualidade de uma escola é o resultado da qualidade da relação de ensino e aprendizagem
Política de Formação da SEDUC A escola como lócus da formação A qualidade da aprendizagem como objetivo estratégico A qualidade de uma escola é o resultado da qualidade da relação de ensino e aprendizagem
Algoritmo. Iniciação do Sistema e Estimativa do consumo. Perfil do utilizador. Recolha de dados
 Algoritmo Iniciação do Sistema e Estimativa do consumo Recolha de dados O algoritmo do sistema de gestão, necessita obrigatoriamente de conhecer todos (ou grande maioria) os aparelhos ligados numa habitação
Algoritmo Iniciação do Sistema e Estimativa do consumo Recolha de dados O algoritmo do sistema de gestão, necessita obrigatoriamente de conhecer todos (ou grande maioria) os aparelhos ligados numa habitação
Gerenciamento de Projetos Modulo II Clico de Vida e Organização
 Gerenciamento de Projetos Modulo II Clico de Vida e Organização Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com Bibliografia* Project Management Institute. Conjunto de Conhecimentos
Gerenciamento de Projetos Modulo II Clico de Vida e Organização Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com Bibliografia* Project Management Institute. Conjunto de Conhecimentos
VIII-Lubi-Brasil-1 REDUÇÃO DO CONSUMO DE ENERGIA ELÉTRICA NAS ESTAÇÕES DE BOMBEAMENTO COM O MODELO HÍBRIDO.
 XXX CONGRESO INTERAMERICANO DE INGENIERÍA SANITARIA Y AMBIENTAL 26 al 30 de noviembre de 2006, Punta del Este Uruguay ASOCIACIÓN INTERAMERICANA DE INGENIERÍA SANITARIA Y AMBIENTAL - AIDIS VIII-Lubi-Brasil-1
XXX CONGRESO INTERAMERICANO DE INGENIERÍA SANITARIA Y AMBIENTAL 26 al 30 de noviembre de 2006, Punta del Este Uruguay ASOCIACIÓN INTERAMERICANA DE INGENIERÍA SANITARIA Y AMBIENTAL - AIDIS VIII-Lubi-Brasil-1
Gestão de impactos sociais nos empreendimentos Riscos e oportunidades. Por Sérgio Avelar, Fábio Risério, Viviane Freitas e Cristiano Machado
 Gestão de impactos sociais nos empreendimentos Riscos e oportunidades Por Sérgio Avelar, Fábio Risério, Viviane Freitas e Cristiano Machado A oferta da Promon Intelligens considera o desenvolvimento de
Gestão de impactos sociais nos empreendimentos Riscos e oportunidades Por Sérgio Avelar, Fábio Risério, Viviane Freitas e Cristiano Machado A oferta da Promon Intelligens considera o desenvolvimento de