Processamento de Imagens COS756 / COC603
|
|
|
- Brian Rocha Pinheiro
- 9 Há anos
- Visualizações:
Transcrição
1 Processamento de Imagens COS756 / COC603 aula 08 - deteção de características de baixo-nível (low-level feature detection) parte II Antonio Oliveira Ricardo Marroquim 1 / 1
2 aula de hoje feature detection overview Laplaciano da Gaussiana pontos de interesse método de Harris curvatura 2 / 1
3 LoG Laplaciano derivada de segunda ordem (progressiva e regressiva) f (x 0 + x) = f (x 0 )+f (x 0 ) x + f (x 0 ) x 2 + f (x 0 ) x 3 +O( x 4 ) 2! 3! f (x 0 x) = f (x 0 ) f (x 0 ) x + f (x 0 ) x 2 f (x 0 ) x 3 +O( x 4 ) 2! 3! somando temos a diferança central (e fazendo x = 1): f (x 0 ) = f (x 0 + x) + f (x 0 x) 2f (x 0 ) 3 / 1
4 Laplaciano operador isotrópico arestas se encontram nos zero-crossings / 1
5 Laplaciano Laplaciano da Gaussiana (LoG) segunda derivada do filtro Gaussiano 2 (g(x, y) I ) = ( 2 g(x, y)) I 2 g(x, y, σ) x g(x, y, σ) g(x, y, σ) y 2 = x 2 + g(x, y, σ) = ( x 2 + y 2 ) 1 σ 2 2 σ 2 e g(x, y, σ) y 2 x 2 +y 2 2σ 2 5 / 1
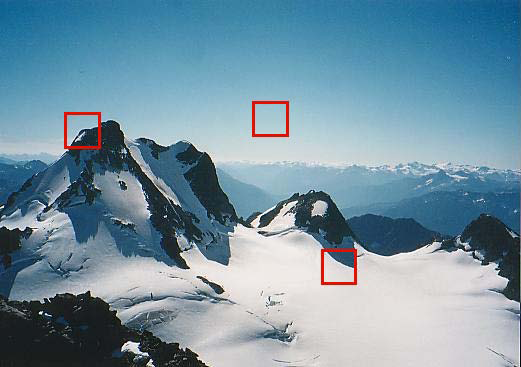
6 keypoint features problemas a serem resolvidos: quais pontos são bons? como representar esta informação? como procurar a correspondência em outra imagem? 6 / 1

7 panorâmica 7 / 1

8 panorâmica 8 / 1
9 panorâmica 9 / 1
10 objetivo encontrar o pixel correspondente em duas imagens dificilmente terá exatamente mesmos valores RGB ex. diferença de iluminação entre as fotos mesmo assim, estaria sujeito a erros (dois pixels iguais em uma mesma imagem) 10 / 1
11 cantos variação de intensidade em qualquer direção arestas: problema de abertura regiões homogêneas: difícil fazer o matching 11 / 1
12 panorâmica 12 / 1
13 solução simples summed square difference: SSD(x, y) = i [I 1 (x + x, y + y) I 0 (x, y)] 2 onde ( x, y) é um deslocamento e i são os pixels dentro de uma janela de busca podemos também usar uma média ponderada SSD() = i w(x i )[I 1 (x + x, y + y) I 0 (x, y)] 2 ] 13 / 1
14 solução simples summed square difference: SSD(x, y) = i [I 1 (x + x, y + y) I 0 (x, y)] 2 onde ( x, y) é um deslocamento e i são os pixels dentro de uma janela de busca podemos também usar uma média ponderada SSD() = i w(x i )[I 1 (x + x, y + y) I 0 (x, y)] 2 ] problema onde procurar na imagem I 1? se a janela de busca for grande, o custo será alto 13 / 1
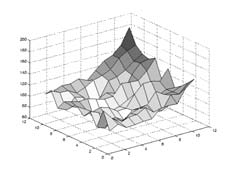
15 Harris detector mas quais são bons pontos a serem utilizados? auto-correlação AC(x, y) = w(x, y)[i (x, y) I (x + x, y + y)] 2 intuitivamente, quão diferente o pixel é dos seus vizinhos 14 / 1
16 15 / 1
17 Harris detector utilizando a aproximação quadrática pela série de Taylor I (x + x, y + y) = I (x, y) + xi x (x, y) + yi y (x, y) substituindo na equação anterior e passando para forma matricial temos: AC [ x y ] [ w i i I x (x i, y i ) 2 I x (x i, y i )I y (x i, y i ) I x (x i, y i )I y (x i, y i ) I y (x i, y i ) 2 ] [ x y ] 16 / 1
18 cônica matriz representa uma seção cônica na sua forma central Ax 2 + Bxy + Cy 2 + Dx + Ey + F = 0 M = [ A B/2 B/2 C ] 17 / 1
19 cônica análise do determinante detm < 0 hipérbola detm = 0 parábola detm > 0 elipse nossa matriz 18 / 1
20 cônica análise do determinante detm < 0 hipérbola detm = 0 parábola detm > 0 elipse nossa matriz simétrica positiva definida detm > 0 elipse autovalores positivos : λ 0, λ 1 > 0 18 / 1
21 Harris detector análise dos autovetores e autovalores (variação) o que podemos concluir a partir dos autovalores? 19 / 1
22 Harris detector o que podemos concluir a partir dos autovalores? 20 / 1
23 Harris detector o que podemos concluir a partir dos autovalores? dois autovalores pequenos pouca variação, área de intensidade mais ou menos constante 20 / 1
24 Harris detector o que podemos concluir a partir dos autovalores? dois autovalores pequenos pouca variação, área de intensidade mais ou menos constante um autovalor grande e um pequeno aresta 20 / 1
25 Harris detector o que podemos concluir a partir dos autovalores? dois autovalores pequenos pouca variação, área de intensidade mais ou menos constante um autovalor grande e um pequeno aresta dois autovalores grandes ponto, quina 20 / 1
26 Harris detector Harris (1988) usou a medida: det(m) αtrace(m) 2 = λ 0 λ 1 α(λ 0 + λ 1 ) 2 com α = 0.06 Triggs (2004) usou a medida (onde λ 0 < λ 1 ): λ 0 αλ 1 com α = / 1
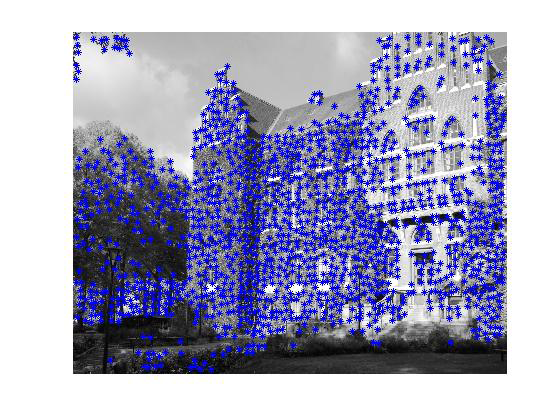
27 algoritmo 1. calcular I x e I y : gradiente na direção x e y pode usar por exemplo: convolução da derivada de uma Gaussiana 2. calcular os produtos I 2 x = I x I x, I 2 y = I y I y e I xy = I x I y 3. convoluir as três imagens com uma Gaussiana 4. para cada pixel: encontrar os autovalores e utilizar uma das medidas 5. limiarizar para encontrar máximos 6. limitar número de máximos por região 22 / 1
28 23 / 1
29 24 / 1
O TEOREMA ESPECTRAL E AS FORMAS QUADRÁTICAS NO PLANO: CLASSIFICAÇÃO DAS CÔNICAS
 O TEOREMA ESPECTRAL E AS FORMAS QUADRÁTICAS NO PLANO: CLASSIFICAÇÃO DAS CÔNICAS Eduardo Corrêa Pedrosa (monitor) Profª. Drª. Ana Maria Luz Fassarella do Amaral (orientadora) GANP001 Motivação Este projeto
O TEOREMA ESPECTRAL E AS FORMAS QUADRÁTICAS NO PLANO: CLASSIFICAÇÃO DAS CÔNICAS Eduardo Corrêa Pedrosa (monitor) Profª. Drª. Ana Maria Luz Fassarella do Amaral (orientadora) GANP001 Motivação Este projeto
Fundamentos da Computação Gráfica
 Fundamentos da Computação Gráfica Trabalho 2 Visão. Detecção de cantos. Manuel Alejandro Nodarse Moreno (1322198) Introdução. Detecção de cantos é uma abordagem utilizada em sistemas de visão computacional
Fundamentos da Computação Gráfica Trabalho 2 Visão. Detecção de cantos. Manuel Alejandro Nodarse Moreno (1322198) Introdução. Detecção de cantos é uma abordagem utilizada em sistemas de visão computacional
Feature Detector. Prof. Dr. Geraldo Braz Junior
 Feature Detector Prof. Dr. Geraldo Braz Junior Problema: Matching 2 Matching 3 Matching Processo de encontrar uma imagem em outra Normalmente usado para encontrar um objeto numa imagem, mas também: Reconhecimento
Feature Detector Prof. Dr. Geraldo Braz Junior Problema: Matching 2 Matching 3 Matching Processo de encontrar uma imagem em outra Normalmente usado para encontrar um objeto numa imagem, mas também: Reconhecimento
Álgebra Linear em Visão Computacional
 Visão geral Universidade Federal do Rio Grande do Norte Material compilado em 30 de novembro de 2016. Licença desta apresentação: http://creativecommons.org/licenses/ Introdução Conceitos básicos Operadores
Visão geral Universidade Federal do Rio Grande do Norte Material compilado em 30 de novembro de 2016. Licença desta apresentação: http://creativecommons.org/licenses/ Introdução Conceitos básicos Operadores
Aula 5 - Segmentação de Imagens
 Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo
Aula 5 - Segmentação de Imagens Parte 1 Prof. Adilson Gonzaga 1 Segmentação Agrupamento de partes de uma imagem em unidades homogêneas relativamente a determinadas características. Segmentação é o processo
SIFT - Scale Invariant Feature Transform
 SIFT - Scale Invariant Feature Transform Daniel Pinto Coutinho Prof. Ricardo Marroquim 1 Introdução A detecção de pontos de interesse em uma figura é uma tarefa muito comum no campo de processamento de
SIFT - Scale Invariant Feature Transform Daniel Pinto Coutinho Prof. Ricardo Marroquim 1 Introdução A detecção de pontos de interesse em uma figura é uma tarefa muito comum no campo de processamento de
Jorge M. V. Capela, Marisa V. Capela. Araraquara, SP
 Cônicas e Equações Quadráticas Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP [email protected] Araraquara, SP - 2017 1 Parábolas 2 3 4 5 Introdução Parábolas Parábolas
Cônicas e Equações Quadráticas Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP [email protected] Araraquara, SP - 2017 1 Parábolas 2 3 4 5 Introdução Parábolas Parábolas
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 6 de outubro de 2016 Segmentação de imagens A segmentação
MAT-27 Lista-09 Outubro/2011
 MAT-27 Lista-09 Outubro/2011 1. Determinar, se possível, uma matriz M M 2 (R) de maneira que M 1 AM seja diagonal nos seguintes casos: [ ] 2 4 (a) 3 13 [ ] 3 2 2 1 2. Achar uma matriz diagonal semelhante
MAT-27 Lista-09 Outubro/2011 1. Determinar, se possível, uma matriz M M 2 (R) de maneira que M 1 AM seja diagonal nos seguintes casos: [ ] 2 4 (a) 3 13 [ ] 3 2 2 1 2. Achar uma matriz diagonal semelhante
Equação Geral do Segundo Grau em R 2
 8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
8 Equação Geral do Segundo Grau em R Sumário 8.1 Introdução....................... 8. Autovalores e autovetores de uma matriz real 8.3 Rotação dos Eixos Coordenados........... 5 8.4 Formas Quadráticas..................
4 SIFT (Scale Invariant Feature Transform)
") 4 SIFT (Scale Invariant Feature Transform) SIFT é um algoritmo de visão computacional publicado por David Lowe, em 1999 (Lowe, 1999) e patenteado nos EUA pela University of British Columbia. SIFT é composto
4 SIFT (Scale Invariant Feature Transform) SIFT é um algoritmo de visão computacional publicado por David Lowe, em 1999 (Lowe, 1999) e patenteado nos EUA pela University of British Columbia. SIFT é composto
(d) v é um autovetor de T se, e somente se, T 2 = T ; (e) v é um autovetor de T se, e somente se, T (v) = v.
 v é um autovetor de T se, e somente se, T 2 = T ; (e) v é um autovetor de T se, e somente se, T (v) = v.") Q1. Seja V um espaço vetorial real de dimensão finita munido de um produto interno. Sejam T : V V um operador linear simétrico e W um subespaço de V tal que T (w) W, para todo w W. Suponha que W V e que
Q1. Seja V um espaço vetorial real de dimensão finita munido de um produto interno. Sejam T : V V um operador linear simétrico e W um subespaço de V tal que T (w) W, para todo w W. Suponha que W V e que
(I) T tem pelo menos um autovalor real; (II) T é diagonalizável; (III) no espaço vetorial real R n, o conjunto {u, v} é linearmente independente.
 T tem pelo menos um autovalor real; (II) T é diagonalizável; (III) no espaço vetorial real R n, o conjunto {u, v} é linearmente independente.") Q1. Sejam n um inteiro positivo, T : C n C n um operador linear e seja A = [T ] can a matriz que representa T em relação à base canônica do espaço vetorial complexo C n. Suponha que a matriz A tenha entradas
Q1. Sejam n um inteiro positivo, T : C n C n um operador linear e seja A = [T ] can a matriz que representa T em relação à base canônica do espaço vetorial complexo C n. Suponha que a matriz A tenha entradas
Filtros espaciais. Processamento e Recuperação de Imagens Médicas. Prof. Luiz Otavio Murta Jr. Depto. De Computação e Matemática (FFCLRP/USP)
") Processamento e Recuperação de Imagens Médicas Prof. Luiz Otavio Murta Jr. Depto. De Computação e Matemática (FFCLRP/USP) 1 Propriedades Operadores de suavização os elementos da máscara são positivos e
Processamento e Recuperação de Imagens Médicas Prof. Luiz Otavio Murta Jr. Depto. De Computação e Matemática (FFCLRP/USP) 1 Propriedades Operadores de suavização os elementos da máscara são positivos e
Descritores de Imagens
 Descritores de Imagens André Tavares da Silva PPGCA/UDESC Outubro de 2017 André Tavares da Silva (PPGCA/UDESC) Descritores de Imagens Outubro de 2017 1 / 18 Descritores Locais e Frameworks SIFT SURF Viola-Jones
Descritores de Imagens André Tavares da Silva PPGCA/UDESC Outubro de 2017 André Tavares da Silva (PPGCA/UDESC) Descritores de Imagens Outubro de 2017 1 / 18 Descritores Locais e Frameworks SIFT SURF Viola-Jones
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 11 de novembro de 2016 Fluxo óptico Usado para estimar
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 11 de novembro de 2016 Fluxo óptico Usado para estimar
Marcelo M. Santos DM-IMECC-UNICAMP msantos/
 Universidade Estadual de Maringá - Departamento de Matemática Cálculo Diferencial e Integral: um KIT de Sobrevivência 0 anos c Publicação Eletrônica do KIT http://www.dma.uem.br/kit Identificação de Cônicas
Universidade Estadual de Maringá - Departamento de Matemática Cálculo Diferencial e Integral: um KIT de Sobrevivência 0 anos c Publicação Eletrônica do KIT http://www.dma.uem.br/kit Identificação de Cônicas
CM005 Álgebra Linear Lista 3
 CM005 Álgebra Linear Lista 3 Alberto Ramos Seja T : V V uma transformação linear. Se temos que T v = λv, v 0, para λ K. Dizemos que λ é um autovalor de T e v autovetor de T associado a λ. Observe que λ
CM005 Álgebra Linear Lista 3 Alberto Ramos Seja T : V V uma transformação linear. Se temos que T v = λv, v 0, para λ K. Dizemos que λ é um autovalor de T e v autovetor de T associado a λ. Observe que λ
A primeira coisa a fazer é saber quais são as equações das curvas quando elas já se encontram na melhor
 Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Identificação de Cônicas Uma equação do segundo grau ax + bxy + cy + dx + ey + f = 0 define de maneira implícita uma curva no plano xy: o conjunto dos pontos (x, y) que satisfazem a equação. Por exemplo,
Ga no plano 1. GA no plano. Prof. Fernando Carneiro Rio de Janeiro, Outubro de u v = aa + bb.
 Ga no plano 1 GA no plano Prof. Fernando Carneiro Rio de Janeiro, Outubro de 015 1 Introdução Estudaremos as retas no plano euclidiano bidimensional e uma interessante aplicação, que recebe o nome de programação
Ga no plano 1 GA no plano Prof. Fernando Carneiro Rio de Janeiro, Outubro de 015 1 Introdução Estudaremos as retas no plano euclidiano bidimensional e uma interessante aplicação, que recebe o nome de programação
Descritores de Imagem
 Descritores de Imagem André Tavares da Silva 31 de março de 2014 1 Descritores de imagem (continuação) 1.1 Frameworks de detecção de objetos SIFT (scale-invariant features transform) (Lowe, 1999) SIFT
Descritores de Imagem André Tavares da Silva 31 de março de 2014 1 Descritores de imagem (continuação) 1.1 Frameworks de detecção de objetos SIFT (scale-invariant features transform) (Lowe, 1999) SIFT
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
ln(x + y) (x + y 1) < 1 (x + y 1)2 3. Determine o polinômio de Taylor de ordem 2 da função dada, em volta do ponto dado:
 (x + y 1) < 1 (x + y 1)2 3. Determine o polinômio de Taylor de ordem 2 da função dada, em volta do ponto dado:") ā Lista de MAT 454 - Cálculo II - a) POLINÔMIOS DE TAYLOR 1. Seja f(x, y) = ln (x + y). a) Determine o polinômio de Taylor de ordem um de f em torno de ( 1, 1 ). b) Mostre que para todo (x, y) IR com x
ā Lista de MAT 454 - Cálculo II - a) POLINÔMIOS DE TAYLOR 1. Seja f(x, y) = ln (x + y). a) Determine o polinômio de Taylor de ordem um de f em torno de ( 1, 1 ). b) Mostre que para todo (x, y) IR com x
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 3 de março de 2016 Transformação e filtragem de imagens
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 3 de março de 2016 Transformação e filtragem de imagens
Sumário. VII Geometria Analítica Jorge Delgado Katia Frensel Lhaylla Crissaff
 1 Coordenadas no plano 1 1.1 Introdução........................................ 2 1.2 Coordenada e distância na reta............................ 3 1.3 Coordenadas no plano.................................
1 Coordenadas no plano 1 1.1 Introdução........................................ 2 1.2 Coordenada e distância na reta............................ 3 1.3 Coordenadas no plano.................................
SEL-0339 Introdução à Visão Computacional. Aula 2 Processamento Espacial (Parte 2)
") Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial (Parte 2) Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga [email protected]
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 2 Processamento Espacial (Parte 2) Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga [email protected]
USO DO DETECTOR DE PONTOS DE INTERESSE SIFT PARA LOCALIZAÇÃO DE ALVOS ARTIFICIAIS DE CONTROLE
 IV Simpósio Brasileiro de Geomática SBG17 II Jornadas Lusófonas - Ciências e Tecnologias de Informação Geográfica - CTIG17 Presidente Prudente - SP, 24-26 de julho de 17 p. 341-346 USO DO DETECTOR DE PONTOS
IV Simpósio Brasileiro de Geomática SBG17 II Jornadas Lusófonas - Ciências e Tecnologias de Informação Geográfica - CTIG17 Presidente Prudente - SP, 24-26 de julho de 17 p. 341-346 USO DO DETECTOR DE PONTOS
Geometria Analítica e Vetorial - Daniel Miranda, Rafael Grisi, Sinuê Lodovici
 9 M U DA N Ç A D E C O O R D E N A DA S O RTO G O N A I S N O P L A N O Como sabemos, um sistema de coordenadas Σ no plano é um conjunto de dois vetores linearmente independentes f 1, f 2 (ou seja uma
9 M U DA N Ç A D E C O O R D E N A DA S O RTO G O N A I S N O P L A N O Como sabemos, um sistema de coordenadas Σ no plano é um conjunto de dois vetores linearmente independentes f 1, f 2 (ou seja uma
Filtros espaciais (suavizaçào)
") Processamento de Imagens Médicas Filtros espaciais (suavizaçào) Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) 1 Necessidade de pré-processamento 2 Propriedades
Processamento de Imagens Médicas Filtros espaciais (suavizaçào) Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) 1 Necessidade de pré-processamento 2 Propriedades
SEL Visão Computacional. Aula 2 Processamento Espacial
 Departamento de Engenharia Elétrica - EESC-USP SEL-5895 - Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Adilson Gonzaga Prof. Dr. Evandro Linhari Rodrigues Prof. Dr. Marcelo Andrade da Costa
Departamento de Engenharia Elétrica - EESC-USP SEL-5895 - Visão Computacional Aula 2 Processamento Espacial Prof. Dr. Adilson Gonzaga Prof. Dr. Evandro Linhari Rodrigues Prof. Dr. Marcelo Andrade da Costa
MAT Álgebra Linear para Engenharia II
 MAT2458 - Álgebra Linear para Engenharia II Prova de Recuperação - 05/02/2014 Nome: Professor: NUSP: Turma: INSTRUÇÕES (1) A prova tem início às 7:30 e duração de 2 horas. (2) Não é permitido deixar a
MAT2458 - Álgebra Linear para Engenharia II Prova de Recuperação - 05/02/2014 Nome: Professor: NUSP: Turma: INSTRUÇÕES (1) A prova tem início às 7:30 e duração de 2 horas. (2) Não é permitido deixar a
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 04 - reconstrução de sinais digitais Antonio Oliveira Ricardo Marroquim 1 / 42 aula de hoje e reconstrução overview amostrando um sinal reconstruindo um sinal
Processamento de Imagens COS756 / COC603 aula 04 - reconstrução de sinais digitais Antonio Oliveira Ricardo Marroquim 1 / 42 aula de hoje e reconstrução overview amostrando um sinal reconstruindo um sinal
Simulação Gráfica. Segmentação de Imagens Digitais. Julio C. S. Jacques Junior
 Simulação Gráfica Segmentação de Imagens Digitais Julio C. S. Jacques Junior Segmentação Subdivide uma imagem em suas partes ou objetos constituintes. O nível até o qual essa subdivisão deve ser realizada
Simulação Gráfica Segmentação de Imagens Digitais Julio C. S. Jacques Junior Segmentação Subdivide uma imagem em suas partes ou objetos constituintes. O nível até o qual essa subdivisão deve ser realizada
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 03 - operações no domínio espacial Antonio Oliveira Ricardo Marroquim 1 / 38 aula de hoje operações no domínio espacial overview imagem digital operações no
Processamento de Imagens COS756 / COC603 aula 03 - operações no domínio espacial Antonio Oliveira Ricardo Marroquim 1 / 38 aula de hoje operações no domínio espacial overview imagem digital operações no
GAAL - Terceira Prova - 15/junho/2013. Questão 1: Analise se a afirmação abaixo é falsa ou verdadeira:
 GAAL - Terceira Prova - /junho/3 SOLUÇÕES Questão : Analise se a afirmação abaio é falsa ou verdadeira: [ A matriz A é diagonalizável SOLUÇÃO: Sabemos que uma matriz n n é diagonalizável se ela possuir
GAAL - Terceira Prova - /junho/3 SOLUÇÕES Questão : Analise se a afirmação abaio é falsa ou verdadeira: [ A matriz A é diagonalizável SOLUÇÃO: Sabemos que uma matriz n n é diagonalizável se ela possuir
MATRIZES POSITIVAS DEFINIDAS
 MATRIZES POSITIVAS DEFINIDAS Álgebra Linear (MAT-27) Ronaldo Rodrigues Pelá IEFF-ITA 7 de novembro de 2011 Roteiro 1 2 3 Roteiro 1 2 3 Por que saber se uma matriz é definida positiva? Importância do sinal
MATRIZES POSITIVAS DEFINIDAS Álgebra Linear (MAT-27) Ronaldo Rodrigues Pelá IEFF-ITA 7 de novembro de 2011 Roteiro 1 2 3 Roteiro 1 2 3 Por que saber se uma matriz é definida positiva? Importância do sinal
GEOMETRIA II EXERCÍCIOS RESOLVIDOS - ABRIL, 2018
 GEOMETRIA II EXERCÍCIOS RESOLVIDOS - ABRIL, 08 ( Seja a R e f(x, y ax + ( ay. Designe por C a a cónica dada por f(x, y 0. (a Mostre que os quatro pontos (±, ± R pertencem a todas as cónicas C a (independentemente
GEOMETRIA II EXERCÍCIOS RESOLVIDOS - ABRIL, 08 ( Seja a R e f(x, y ax + ( ay. Designe por C a a cónica dada por f(x, y 0. (a Mostre que os quatro pontos (±, ± R pertencem a todas as cónicas C a (independentemente
Retratos de Fase de Sistemas Lineares Homogêneos 2 2
 Retratos de Fase de Sistemas Lineares Homogêneos 2 2 Reginaldo J Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://wwwmatufmgbr/~regi 2 de novembro de 20 2 Eemplo Considere
Retratos de Fase de Sistemas Lineares Homogêneos 2 2 Reginaldo J Santos Departamento de Matemática-ICE Universidade Federal de Minas Gerais http://wwwmatufmgbr/~regi 2 de novembro de 20 2 Eemplo Considere
Matrizes positivas definidas, semidefinidas, etc.
 Matrizes positivas definidas, semidefinidas, etc. Amit Bhaya, Programa de Engenharia Elétrica COPPE/UFRJ Universidade Federal do Rio de Janeiro [email protected] http://www.nacad.ufrj.br/ amit Funções
Matrizes positivas definidas, semidefinidas, etc. Amit Bhaya, Programa de Engenharia Elétrica COPPE/UFRJ Universidade Federal do Rio de Janeiro [email protected] http://www.nacad.ufrj.br/ amit Funções
Implementação do algoritmo SIFT para detecção de objetos em imagens.
 Universidade Federal do Rio de Janeiro Instituto Alberto Luiz Coimbra de Pós-Graduação e Pesquisa de Engenharia Programa de Engenharia de Sistemas e Computação Rio de Janeiro, RJ - Brasil Implementação
Universidade Federal do Rio de Janeiro Instituto Alberto Luiz Coimbra de Pós-Graduação e Pesquisa de Engenharia Programa de Engenharia de Sistemas e Computação Rio de Janeiro, RJ - Brasil Implementação
Resposta - Questão 01: Equação genérica do segundo grau: f(x) = ax² + bx + c. a) f(x) = x² 7x + 10 a = 1 b = 7 c = 10 I Cálculo das raízes:
 = ax² + bx + c. a) f(x) = x² 7x + 10 a = 1 b = 7 c = 10 I Cálculo das raízes:") 1) Estude as raízes, determine o vértice, interseção com o eixo y, eixo de simetria, esboce o gráfico e estude o sinal das funções a seguir. a. f(x) = x 2 7x + 10 b. g(x) = x 2 + 4x + 4 c. y = -3x 2 +
1) Estude as raízes, determine o vértice, interseção com o eixo y, eixo de simetria, esboce o gráfico e estude o sinal das funções a seguir. a. f(x) = x 2 7x + 10 b. g(x) = x 2 + 4x + 4 c. y = -3x 2 +
Matrizes Semelhantes e Matrizes Diagonalizáveis
 Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Diagonalização Matrizes Semelhantes e Matrizes Diagonalizáveis Nosso objetivo neste capítulo é estudar aquelas transformações lineares de R n para as quais existe pelo menos uma base em que elas são representadas
Realce de imagens parte 2: ltragem espacial SCC5830/0251 Processamento de Imagens
 Realce de imagens parte 2: ltragem espacial SCC5830/0251 Processamento de Imagens Prof. Moacir Ponti Jr. www.icmc.usp.br/~moacir Instituto de Ciências Matemáticas e de Computação USP 2013/1 Moacir Ponti
Realce de imagens parte 2: ltragem espacial SCC5830/0251 Processamento de Imagens Prof. Moacir Ponti Jr. www.icmc.usp.br/~moacir Instituto de Ciências Matemáticas e de Computação USP 2013/1 Moacir Ponti
Revisões de Matemática e Estatística
 Revisões de Matemática e Estatística Joaquim J.S. Ramalho Contents 1 Operadores matemáticos 2 1.1 Somatório........................................ 2 1.2 Duplo somatório....................................
Revisões de Matemática e Estatística Joaquim J.S. Ramalho Contents 1 Operadores matemáticos 2 1.1 Somatório........................................ 2 1.2 Duplo somatório....................................
Sistemas de Equações Lineares e Matrizes
 Sistemas de Equações Lineares e Matrizes. Quais das seguintes equações são lineares em x, y, z: (a) 2x + 2y 5z = x + xy z = 2 (c) x + y 2 + z = 2 2. A parábola y = ax 2 + bx + c passa pelos pontos (x,
Sistemas de Equações Lineares e Matrizes. Quais das seguintes equações são lineares em x, y, z: (a) 2x + 2y 5z = x + xy z = 2 (c) x + y 2 + z = 2 2. A parábola y = ax 2 + bx + c passa pelos pontos (x,
Geometria Analítica Exercícios Cônicas em posição geral
 Geometria Analítica Exercícios Cônicas em posição geral Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Soluções Turmas E1 e E3 1 / 16 Resolução dos exercícios da aula 15 Classique
Geometria Analítica Exercícios Cônicas em posição geral Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Soluções Turmas E1 e E3 1 / 16 Resolução dos exercícios da aula 15 Classique
3.2 Determine a equação da circunferência de raio 5, tangente à reta 3x +4y =16no ponto A (4, 1).
.") 3.1 Obtenha a equação e esboce o gráfico da circunferência caracterizada por: (a) Centro C (, 1) eraior =5; (b) Passa pelos pontos A (1, ),B(1, 1) e C (, 3) ; (c) Inscrita no triângulo determinado pelas
3.1 Obtenha a equação e esboce o gráfico da circunferência caracterizada por: (a) Centro C (, 1) eraior =5; (b) Passa pelos pontos A (1, ),B(1, 1) e C (, 3) ; (c) Inscrita no triângulo determinado pelas
Trabalho Final de Processamento de Imagens: Panografia
 Trabalho Final de Processamento de Imagens: Panografia 1. Introdução Vítor Silva Sousa 1 1 Escola Politécnica Universidade Federal do Rio de Janeiro (UFRJ) Rio de Janeiro RJ Brasil [email protected]
Trabalho Final de Processamento de Imagens: Panografia 1. Introdução Vítor Silva Sousa 1 1 Escola Politécnica Universidade Federal do Rio de Janeiro (UFRJ) Rio de Janeiro RJ Brasil [email protected]
Uma não tão breve introdução ao básico de PI. Visão Computacional Programa de Pós-Graduação em Ciência da Computação UFMA Prof. Geraldo BrazJunior
 Uma não tão breve introdução ao básico de PI Visão Computacional Programa de Pós-Graduação em Ciência da Computação UFMA Prof. Geraldo BrazJunior O que fazer com essa aula? Utilize essa aula para conhecer
Uma não tão breve introdução ao básico de PI Visão Computacional Programa de Pós-Graduação em Ciência da Computação UFMA Prof. Geraldo BrazJunior O que fazer com essa aula? Utilize essa aula para conhecer
Álgebra Linear (MAT-27) Ronaldo Rodrigues Pelá. 21 de outubro de 2011
 Ronaldo Rodrigues Pelá. 21 de outubro de 2011") APLICAÇÕES DA DIAGONALIZAÇÃO Álgebra Linear (MAT-27) Ronaldo Rodrigues Pelá IEFF-ITA 21 de outubro de 2011 Roteiro 1 2 3 Roteiro 1 2 3 Introdução Considere a equação de uma cônica: Forma Geral Ax 2 + Bxy
APLICAÇÕES DA DIAGONALIZAÇÃO Álgebra Linear (MAT-27) Ronaldo Rodrigues Pelá IEFF-ITA 21 de outubro de 2011 Roteiro 1 2 3 Roteiro 1 2 3 Introdução Considere a equação de uma cônica: Forma Geral Ax 2 + Bxy
Unidade 22 - Teorema espectral para operadores simétricos, reconhecimento de cônicas. A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa
 MA33 - Introdução à Álgebra Linear Unidade 22 - Teorema espectral para operadores simétricos, reconhecimento de cônicas A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa PROFMAT - SBM 10 de agosto
MA33 - Introdução à Álgebra Linear Unidade 22 - Teorema espectral para operadores simétricos, reconhecimento de cônicas A. Hefez e C. S. Fernandez Resumo elaborado por Paulo Sousa PROFMAT - SBM 10 de agosto
Resolução de sistemas de equações lineares: Método do Gradiente
 Resolução de sistemas de equações lineares: Método do Gradiente Marina Andretta ICMC-USP 24 de março de 2015 Marina Andretta (ICMC-USP) sme0301 - Métodos Numéricos para Engenharia I 24 de março de 2015
Resolução de sistemas de equações lineares: Método do Gradiente Marina Andretta ICMC-USP 24 de março de 2015 Marina Andretta (ICMC-USP) sme0301 - Métodos Numéricos para Engenharia I 24 de março de 2015
CÁLCULO III - MAT Encontre todos os máximos locais, mínimos locais e pontos de sela nas seguintes funções:
 UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERICANA Instituto Latino-Americano de Ciências da Vida e da Natureza Centro Interdisciplinar de Ciências da Natureza CÁLCULO III - MAT0036 9 a Lista de exercícios
UNIVERSIDADE FEDERAL DA INTEGRAÇÃO LATINO-AMERICANA Instituto Latino-Americano de Ciências da Vida e da Natureza Centro Interdisciplinar de Ciências da Natureza CÁLCULO III - MAT0036 9 a Lista de exercícios
Exercício: Identifique e faça um esboço do conjunto solução da. 3x xy + y 2 + 2x 2 3y = 0
 Motivação Exercício: Identifique e faça um esboço do conjunto solução da equação 3x 2 + 2 3xy + y 2 + 2x 2 3y = 0 Motivação Exercício: Identifique e faça um esboço do conjunto solução da equação 3x 2 +
Motivação Exercício: Identifique e faça um esboço do conjunto solução da equação 3x 2 + 2 3xy + y 2 + 2x 2 3y = 0 Motivação Exercício: Identifique e faça um esboço do conjunto solução da equação 3x 2 +
A B C A 1 B 1 C 1 A 2 B 2 C 2 é zero (exceto o caso em que as tres retas são paralelas).
.") MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
MAT 105- Lista de Exercícios 1. Prolongue o segmento com extremos em (1, -5) e (3, 1) de um comprimento de (10) unidades. Determine as coordenadas dos novos extremos. 2. Determine o centro e o raio da
0 < c < a ; d(f 1, F 2 ) = 2c
 = 2c") Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Geometria Analítica - Aula
 Geometria Analítica - Aula 19 246 IM-UFF K. Frensel - J. Delgado Aula 20 Vamos analisar a equação Ax 2 + Cy 2 + Dx + Ey + F = 0 nos casos em que exatamente um dos coeficientes A ou C é nulo. 1. Parábola
Geometria Analítica - Aula 19 246 IM-UFF K. Frensel - J. Delgado Aula 20 Vamos analisar a equação Ax 2 + Cy 2 + Dx + Ey + F = 0 nos casos em que exatamente um dos coeficientes A ou C é nulo. 1. Parábola
Introdução ao Processamento Digital de Imagem MC920 / MO443
 Introdução ao Processamento Digital de Imagem MC920 / MO443 Prof. Hélio Pedrini Instituto de Computação UNICAMP 1º Semestre de 2017 Roteiro 1 Segmentação Detecção de Descontinuidades Detecção de Pontos,
Introdução ao Processamento Digital de Imagem MC920 / MO443 Prof. Hélio Pedrini Instituto de Computação UNICAMP 1º Semestre de 2017 Roteiro 1 Segmentação Detecção de Descontinuidades Detecção de Pontos,
CC-226 Aula 05 - Teoria da Decisão Bayesiana
 CC-226 Aula 05 - Teoria da Decisão Bayesiana Carlos Henrique Q. Forster - Instituto Tecnológico de Aeronáutica 2008 Classificador Bayesiano Considerando M classes C 1... C M. N observações x j. L atributos
CC-226 Aula 05 - Teoria da Decisão Bayesiana Carlos Henrique Q. Forster - Instituto Tecnológico de Aeronáutica 2008 Classificador Bayesiano Considerando M classes C 1... C M. N observações x j. L atributos
Aula 8 Cônicas - Translação de sistemas de coordenadas
 Aula 8 Cônicas - Translação de sistemas de coordenadas MÓDULO 1 - AULA 8 Objetivos Entender a mudança de coordenadas pela translação do sistema cartesiano. Identificar uma cônica transladada a partir da
Aula 8 Cônicas - Translação de sistemas de coordenadas MÓDULO 1 - AULA 8 Objetivos Entender a mudança de coordenadas pela translação do sistema cartesiano. Identificar uma cônica transladada a partir da
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage [email protected] Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage [email protected] Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
CF372 Mecânica Quântica I Segunda Lista de Exercícios - Capítulo II. q exp( q 2 ) ( 2 π. 2 (2q 2 1) exp( q 2 )
 ( 2 π. 2 (2q 2 1) exp( q 2 )") CF372 Mecânica Quântica I Segunda Lista de Exercícios - Capítulo II 1) Dadas as funções ψ 1 (q) e ψ 2 (q), definidas no intervalo < q < + : ψ 1 (q) = ( 2 π ) 1/2 q exp( q 2 ) Calcule: a) (ψ 1, ψ 2 ); b)
CF372 Mecânica Quântica I Segunda Lista de Exercícios - Capítulo II 1) Dadas as funções ψ 1 (q) e ψ 2 (q), definidas no intervalo < q < + : ψ 1 (q) = ( 2 π ) 1/2 q exp( q 2 ) Calcule: a) (ψ 1, ψ 2 ); b)
T4 Processamento de Imagem
 T4 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Hélder Filipe Pinto de Oliveira Resumo 1. Manipulação ponto a ponto 2. Conetividade 3. Filtros espaciais 4. Extração de estruturas
T4 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Hélder Filipe Pinto de Oliveira Resumo 1. Manipulação ponto a ponto 2. Conetividade 3. Filtros espaciais 4. Extração de estruturas
Processamento Digital de Imagens. Análise de Imagens
 Processamento Digital de Imagens Análise de Imagens Eduardo A. B. da Silva Programa de Engenharia Elétrica - COPPE/UFRJ Laboratório de Sinais, Multimídia e Telecomunicações [email protected] Sergio L.
Processamento Digital de Imagens Análise de Imagens Eduardo A. B. da Silva Programa de Engenharia Elétrica - COPPE/UFRJ Laboratório de Sinais, Multimídia e Telecomunicações [email protected] Sergio L.
SEGUNDA CHAMADA CALCULO 2 2/2017
 9/11/017 SEGUNDA CHAMADA CALCULO /017 PROF: RENATO FERREIRA DE VELLOSO VIANNA Questão 1,5 pontos). Resolva os problemas de valor inicial: y + 4y + 4y = e x {, y = xyy + 4), a) = y0) = 0, b) = y0) = 5.
9/11/017 SEGUNDA CHAMADA CALCULO /017 PROF: RENATO FERREIRA DE VELLOSO VIANNA Questão 1,5 pontos). Resolva os problemas de valor inicial: y + 4y + 4y = e x {, y = xyy + 4), a) = y0) = 0, b) = y0) = 5.
SEÇÕES CÔNICAS. Figura 1
 INSTITUTO DE MATEMÁTICA UFBA DISCIPLINA: MATEMÁTICA BÁSICA II - SEM. 004.1 PROF. GRAÇA LUZIA DOMINGUEZ SANTOS SEÇÕES CÔNICAS Sejam duas retas e e r concorrentes em O, tal que o ângulo α entre e e r é diferente
INSTITUTO DE MATEMÁTICA UFBA DISCIPLINA: MATEMÁTICA BÁSICA II - SEM. 004.1 PROF. GRAÇA LUZIA DOMINGUEZ SANTOS SEÇÕES CÔNICAS Sejam duas retas e e r concorrentes em O, tal que o ângulo α entre e e r é diferente
23 e 24. Forma Quadrática e Equação do Segundo Grau em R 3. Sumário
 23 e 24 Forma Quadrática e Equação do Segundo Grau em R 3 Sumário 23.1 Introdução....................... 2 23.2 Autovalores e Autovetores de uma matriz 3 3.. 2 23.3 Mudança de Coordenadas no Espaço........
23 e 24 Forma Quadrática e Equação do Segundo Grau em R 3 Sumário 23.1 Introdução....................... 2 23.2 Autovalores e Autovetores de uma matriz 3 3.. 2 23.3 Mudança de Coordenadas no Espaço........
CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA
 04 CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA CAPÍTULO 0 TRANSLAÇÃO E ROTAÇÃO DE EIXOS TRANSLAÇÃO DE EIXOS NO R Sejam e O os eixos primitivos, do Sistema Cartesiano de Eixos Coordenados com origem O(0,0).
04 CÁLCULO VETORIAL E GEOMETRIA ANALÍTICA CAPÍTULO 0 TRANSLAÇÃO E ROTAÇÃO DE EIXOS TRANSLAÇÃO DE EIXOS NO R Sejam e O os eixos primitivos, do Sistema Cartesiano de Eixos Coordenados com origem O(0,0).
UNIVERSIDADE FEDERAL DE MINAS GERAIS (UFMG) ADÉLIO DANIEL DE SOUSA FREITAS
 ADÉLIO DANIEL DE SOUSA FREITAS") UNIVERSIDADE FEDERAL DE MINAS GERAIS (UFMG) ADÉLIO DANIEL DE SOUSA FREITAS O ESTUDO DA DIAGONALIZAÇÃO DE MATRIZES SIMETRICAS DE 2º ORDEM. BELO HORIZONTE 2012 ADÉLIO DANIEL DE SOUSA FREITAS O ESTUDO DA
UNIVERSIDADE FEDERAL DE MINAS GERAIS (UFMG) ADÉLIO DANIEL DE SOUSA FREITAS O ESTUDO DA DIAGONALIZAÇÃO DE MATRIZES SIMETRICAS DE 2º ORDEM. BELO HORIZONTE 2012 ADÉLIO DANIEL DE SOUSA FREITAS O ESTUDO DA
MAE125 Álgebra Linear /1 Turmas EQN/QIN
 MAE25 Álgebra Linear 2 205/ Turmas EQN/QIN Planejamento (última revisão: 0 de junho de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na semana seguinte à aula e valem nota Todas
MAE25 Álgebra Linear 2 205/ Turmas EQN/QIN Planejamento (última revisão: 0 de junho de 205) Os exercícios correspondentes a cada aula serão cobrados oralmente na semana seguinte à aula e valem nota Todas