CONTROLO. 3º ano 2º semestre 2005/2006. Transparências de apoio às aulas teóricas. Capítulo 1 Introdução ao Controlo
|
|
|
- Natália Tomé Cruz
- 6 Há anos
- Visualizações:
Transcrição

1 Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano 2º semestre 2005/2006 Transparências de apoio às aulas teóricas Capítulo 1 Introdução ao Controlo Maria Isabel Ribeiro António Pascoal Setembro de 2001 Revisões em Março de 2002, Setembro 2003, Setembro 2005 Todos os direitos reservados Estas notas não podem ser usadas para fins distintos daqueles para que foram elaboradas (leccionação no Instituto Superior Técnico) sem autorização dos autores 1/Cap.1
2 MOTIVAÇÃO O que é um SISTEMA DE CONTROLO? Um conjunto de sub-sistemas e processos (dispositivos, sistemas físicos) interactuando com o objectivo de levar a saída desse processo a exibir um comportamento desejado. Entrada: estímulo Resposta desejada Sistema de controlo Saída: resposta Resposta efectiva Os sistemas de controlo automático Fazem parte integrante da sociedade moderna, fruto da intervenção do homem, Estão presentes, desde sempre, na natureza, Existem em inúmeras aplicações. 2/Cap.1
3 MOTIVAÇÃO O que é um SISTEMA DE CONTROLO? Entrada: estímulo Resposta desejada Sistema de controlo Saída: resposta Resposta efectiva Controlo de um elevador Resposta desejada indicação do piso para onde se pretende ir Resposta efectiva variação da altura do elevador com o tempo 3/Cap.1
 ou (olhos+cabeça+tronco) são capazes de seguir um objecto móvel por forma a mantê-lo dentro do campo de visão Zona de maior acuidade")
4 EXEMPLOS Mecanismos biológicos de controlo no Corpo Humano Variáveis que são controladas Pressão sanguínea Concentração de açucar no sangue Dióxido de carbono Diâmetro das pupilas... Problema: seguimento de objectos Os olhos ou (olhos+cabeça) ou (olhos+cabeça+tronco) são capazes de seguir um objecto móvel por forma a mantê-lo dentro do campo de visão Zona de maior acuidade visual Luz incidente Retina eixo óptico Pupila Lente Fóvea central Córnea Eixo óptico Iris Nervo óptico θ ocular Retina θ Musculos oculares θ =θ ocular - θ objecto Sistema de visão θ objecto 4/Cap.1

 de glucose ainda não existem Figuras retiradas de Modern Control Systems, R.Dorf, R.")
5 Sistema de controlo em biomedicina Criação de implantes que permitam a administração automática de medicamentos em doentes insulina em diabéticos valores para um não diabético controlo em cadeia aberta controlo em cadeia fechada modelo matemático da relação causa-efeito na administração de um fármaco características do paciente Sensores (miniatura) de glucose ainda não existem Figuras retiradas de Modern Control Systems, R.Dorf, R.Bishop 5/Cap.1
6 Sistemas térmicos Variáveis que são controladas temperatura Aplicações Sistemas de aquecimento central em edifícios Processos industriais (químicos) sistema de controlo de temperatura água fria água quente OBJECTIVO: manter constante a temperatura da água no tanque Entrada: temperatura desejada, Τ ref Sistema de controlo de temperatura Saída: temperatura real, Τ Duas estratégias de controlo: colocar as torneiras em posições pré-determinadas CADEIA ABERTA ir actuando nas torneiras como função da avaliação da temperatura da água no tanque CADEIA FECHADA 6/Cap.1
7 Sistema de controlo de temperatura CADEIA ABERTA As torneiras da água fria e da água quente são colocadas em posições pré-determinadas p.e., resultante da experiência de um operador Nem a saída (temperatura da água no tanque) nem outras variáveis do sistema (p.e., temperatura da água nos canos, temperatura ambiente) são usadas. Que sucede se houver PERTURBAÇÕES às condições normais de funcionamento? Que sucede se: temperatura da água nas canalizações diferente da habitual? A temperatura ambiente for mais baixa do que usualmente? O depósito de água quente ficar sem água? PERTURBAÇÕES o sinal de saída não tem o valor desejado O êxito deste tipo de controlo EM CADEIA ABERTA depende de: Calibração do elemento de controlo Periodicidade da ocorrência das acções de controlo (experiência do operador) Ausência de perturbações 7/Cap.1
8 Sistema de controlo de temperatura CADEIA FECHADA Existe retroacção quer a saída, quer outras variáveis do sistema afectam a actuação do sistema Tipo de retroacção Manual Automática Controlo automático em cadeia fechada água fria Ampl. motor engrenagens água quente Ampl. motor engrenagens Τ ref controlador Τ termopares Sensores termopares tensões eléctricas proporcionais às temperaturas lidas Controlador compara a tempartura de referência, Tref, com uma função das temperaturas lidas. A saída é uma tensão eléctrica que vai actuar o sistema ampl+motor+engrenagens Amplificador e Motor actuação na posição angular das torneiras Engrenagens o motor é inerentemente um dispositivo de alta velocidade e as torneiras devem ser actuadas lentamente. 8/Cap.1
9 Sistema de controlo de temperatura CADEIA FECHADA a introdução da realimentação torna menos sensível os efeitos de perturbações externas ou de variação de parâmetros (incerteza no modelo do sistema físico) mas... pode conduzir a situações de instabilidade Exemplo: posição fixa na torneira de água fria água fria água quente Ampl. motor engrenagens Τ ref controlador Τ T muito baixo Aumentar caudal de água quente Há atraso na propagação da água quente nas canalizações T baixa ainda mais T > Τ ref... T < Τ ref Aumentar ainda mais caudal de água quente Quando finalmente a água quente atinge a torneira, vem muito quente Diminuir o caudal de água quente Ganho elevado + atraso instabilidade 9/Cap.1
10 Sistemas mecânicos EXEMPLOS Variáveis que são controladas Posição (linear, angular) Velocidade (linear, angular) Força Binário Aplicações Sistemas de transporte Elevadores Automóveis Robots móveis (terrestres, submarinos) Aviões International Space Station (ISS) Linhas de montagem em fábricas Sistemas de comunicações Antenas Dispositivos eléctricos e electrónicos Leitores de CD Máquinas fotográficas Discos de PCs 10/Cap.1
11 Controlo de um manipulador com duas articulações Controlo de posição do efector terminal Variações imprevisíveis Perturbações (binários aplicados) u 1 (volt) u 2 (volt) Sistema a controlar Sistema mecânico + motores θ 1 (rad) θ 2 (rad) u 1. u 2. sinais eléctricos θ 1, θ 2 posições das articulações ESTRATÉGIA DE CONTROLO Variações imprevisíveis θ 1 ref θ 2 ref Sinais a seguir Controlador u 1 u 2 SISTEMA DE CONTROLO Sistema a controlar S 1 S 2 sensores n ruído θ 1 (rad) θ 2 (rad) 11/Cap.1







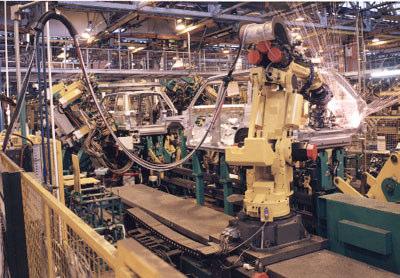
12 ANDROS robot terrestre para o desmantelamento de bombas Empresa: REMOTEC Robot de soldadura na indústria automóvel Robot de pintura 12/Cap.1

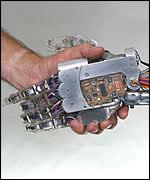

13 Manipulador Soporcel Figueira da Foz Mãos robóticas 13/Cap.1

14 Sistemas mecânicos de posição Condução de um automóvel por um operador humano perturbações Direcção de movimento desejada + _ Erro condutor Sistema de controlo de direcção automóvel Direcção de movimento actual Sensores visuais e tácteis Ruidos nos sensores E se não houvesse retroacção? perturbações Direcção de movimento desejada condutor Que aconteceria se: Sistema de controlo de direcção automóvel Houvesse um obstáculo inesperado? Direcção de movimento actual Uma das rodas passasse por cima de um obstáculo? Um dos pneus ficasse com menos ar? O piso tivesse óleo? 14/Cap.1


15 Sistemas mecânicos de posição Condução de um Veículo Guiado Automaticamente (AGV) que deve seguir AUTOMATICAMENTE uma trajectória definida no chão Aplicações Transporte automático de materiais ou de produtos acabados em unidades industriais Tem características que variam no tempo: peso da carga envelhecimento do material carga das baterias Incertezas no modelo matemático do AGV Trajectória desejada Sinal de erro + _ Controlador Implementado no computador de bordo do AGV ruído dos sensores Motor de direcção Sensores de posição AGV Retroacção Perturbações Piso irregular Trajectória efectiva 15/Cap.1



16 Sistemas mecânicos de posição Trajectória desejada Trajectória real O controlo é implementado para que a trajectória real se aproxime da trajectória desejada, independentemente das perturbações e incertezas Laser Guided Vehicle Soporcel Fábrica de Papel NASA Mars rover 16/Cap.1
17 EXEMPLOS Sistemas mecânicos de posição Controlo de condução de AGVs AGV com controlo diferencial V d velocidade linear da roda direita V e velocidade linear da roda esquerda V d =v e trajectória segunda uma recta V d >v e AGV roda para a esquerda Trajectória desejada recta Entradas de referência, v d, v e com v d =v e A roda esquerda passa por cima de um obstáculo semicilíndrico Há uma perturbação Desempenho do sistema SEM RETROACÇÃO CONTOLO EM CADEIA FECHADA 3 2,5 2 1,5 1 0,5 0-0, Trajectória efectiva Trajectória desejada=recta O efeito da perturbação não é rejeitado 17/Cap.1
18 EXEMPLOS Remotely Operated Vehicle (ROV) Controlo de posição referido a O canal acústico Controlo de atitute referido a O giroscópios e câmaras Incertezas no modelo Motores de propulsão ROV d (correntes) posição orientação trajectória Controlador n 1 giroscópio n 2 Canal acústico 18/Cap.1



19 Veículo submarino autónomo Movimento no plano horizontal orientação real orientação desejada Objectivo do controlo: levar o erro de orientação do veículo para zero 19/Cap.1
20 Veículo submarino autónomo Movimento no plano horizontal Sistema de controlo de orientação COMPUTADOR + ALGORITMO DE CONTROLO Leme vertical Veículo + SENSOR DE ORIENTAÇÃO Valor desejado O modelo do veículo não traduz exactamente o comportamento do veículo. Há incertezas. O veículo está sujeito a perturbações (p.e., correntes) Os sinais dos sensores são ruidosos 20/Cap.1

21 Sistema de controlo de temperatura Forno de vidro Fábrica da Barbosa & Almeida 21/Cap.1
22 Sistema de controlo de temperatura Forno de vidro Fábrica da Barbosa & Almeida envelhecimento Variações na composição do fuel, temperatura do ar, etc Queimador FORNO ºC ºC no chão controlador controlador implementado em computador sensor 22/Cap.1

 de uma folha de papel, em rolo, com uma largura")


23 Sistemas de controlo industriais Máquina de papel Fábrica de Papel Soporcel, Figueira da Foz Matéria prima à entrada: pasta de papel Saída: produção (ao ritmo de 72Km/h) de uma folha de papel, em rolo, com uma largura de 8.6m e uma espessura de 0.1mm Pasta de papel Bobines de papel Comprimento: 161m Algumas das variáveis que é preciso controlar Temperatura Velocidade Espessura Humidade... Detalhes do processo de fabrico na máquina de papel 23/Cap.1


24 Sistemas Mecânicos de Posição Controlo do azimute de uma antena perturbações Eliminação do efeito das perturbações (p.e., vento) Amplificação de potência resultado da existência do amplificador de potência ruído 24/Cap.1
25 Controlo do azimute de uma antena Quando a saída é igual à entrada, o erro é nulo e o motor não roda. Quanto maior o erro, maior a tensão à entrada do motor, e maior a velocidade de rotação do motor. Consequências de aumentar o ganho do amplificador Varia o valor da saída em regime estacionário? Não. Varia apenas a resposta transitória. O erro em regime estacionário mantém-se nulo. 25/Cap.1
26 Sistema com erro em regime estacionário não nulo + _ Controlador Ganho Processo Consequências do aumento do ganho do controlador? É possível levar o erro em regime estacionário para zero por aumento do ganho do controlador? Usar um compensador (sistema dinâmico) devidamente projectado pode levar a anular o erro em regime estacionário sem induzir grandes oscilações na resposta transitória. Compensador + Sistema _ dinâmico Processo 26/Cap.1


27 EXEMPLOS ISS International Space Station Uma fase da assemblagem Após a conclusão da assemblagem 27/Cap.1
28 SISTEMAS DE CONTROLO em CADEIA FECHADA Nomenclatura Sinal de comando Perturbação Perturbação Entrada de Referência + _ Transdutor Erro + de entrada Controlador Actuador Processo Variável Controlada + + Ruído nos sensores Transdutor de saída ou sensor Cadeia de retroacção 28/Cap.1
29 FASES NO PROJECTO DE CONTROLO Sistema Físico Modelo modelação Representação Matemática Análise Síntese/Projecto Modelação encontrar as leis que regem o comportamento do sistema, a partir de consideração de ordem física podem ser consideradas hipóteses simplificativas ao mesmo sistema físico podem corresponder modelos distintos Do Modelo para a Representação Matemática Utilização das leis físicas na tradução matemática das hipóteses simplificativas da modelação Estimação dos parâmetros do modelo (p.e., por experimentação) Ao mesmo modelo podem corresponder diversas representações matemáticas Análise Caracterização do comportamento do sistema Síntese resposta no tempo, resposta em frequência, estabilidade,... projecto de controladores para que a resposta do sistema satisfaça determinadas especificações 29/Cap.1
CONTROLO. 2º semestre 2007/2008. Transparências de apoio às aulas teóricas. Capítulo 1 Introdução ao Controlo: Exemplos Motivadores
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 2º semestre 2007/2008 Transparências de apoio às aulas
Mestrado Integrado em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 2º semestre 2007/2008 Transparências de apoio às aulas
INTRODUÇÃO ao CONTROLO MeAERO
 INTRODUÇÃO ao CONTROLO MeAERO 1º semestre 2017/2018 Transparências de apoio às aulas teóricas Cap 1 Introdução ao Controlo Exemplos molvadores Isabel Ribeiro António Pascoal Todos os direitos reservados
INTRODUÇÃO ao CONTROLO MeAERO 1º semestre 2017/2018 Transparências de apoio às aulas teóricas Cap 1 Introdução ao Controlo Exemplos molvadores Isabel Ribeiro António Pascoal Todos os direitos reservados
CONTROLO. 3º ano 1º semestre 2004/2005. Transparências de apoio às aulas teóricas. Efeitos da Realimentação e Erros em Regime Permanente
 Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano º semestre 004/005 Transparências de apoio às aulas
Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano º semestre 004/005 Transparências de apoio às aulas
CONTROLO. 2º semestre 2007/2008. Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente
 CONTROLO 2º semestre 2007/2008 Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente Maria Isabel Ribeiro António Pascoal Maio de 2008 Todos os direitos
CONTROLO 2º semestre 2007/2008 Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente Maria Isabel Ribeiro António Pascoal Maio de 2008 Todos os direitos
INTRODUÇÃO AO CONTROLO
 Capítulo 6- Efeitos Realimentação e Erros INTRODUÇÃO AO CONTROLO º semestre 202/203 Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente Maria Isabel Ribeiro
Capítulo 6- Efeitos Realimentação e Erros INTRODUÇÃO AO CONTROLO º semestre 202/203 Transparências de apoio às aulas teóricas Cap 6 Efeitos da Realimentação e Erros em Regime Permanente Maria Isabel Ribeiro
Um sistema é um conjunto de elementos selecionados e organizados, que interagem no sentido de alcançar um ou mais objetivos determinados.
 Sistema de Controle Um sistema é um conjunto de elementos selecionados e organizados, que interagem no sentido de alcançar um ou mais objetivos determinados. Um sistema de controle é um sistema que tenta
Sistema de Controle Um sistema é um conjunto de elementos selecionados e organizados, que interagem no sentido de alcançar um ou mais objetivos determinados. Um sistema de controle é um sistema que tenta
Um sistema de controle consiste em subsistemas e processos (ou plantas) reunidos com o propósito de controlar as saídas dos processos.
 reunidos com o propósito de controlar as saídas dos processos.") Sistemas de Controle Um sistema de controle consiste em subsistemas e processos (ou plantas) reunidos com o propósito de controlar as saídas dos processos. Exemplo: Uma caldeira produz calor como resultado
Sistemas de Controle Um sistema de controle consiste em subsistemas e processos (ou plantas) reunidos com o propósito de controlar as saídas dos processos. Exemplo: Uma caldeira produz calor como resultado
CONTROLO. 3º ano 1º semestre 2003/2004. Transparências de apoio às aulas teóricas. Capítulo 3 Diagramas de Blocos
 Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO º ano º semestre 00/004 Transparências de apoio às aulas teóricas
Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO º ano º semestre 00/004 Transparências de apoio às aulas teóricas
Estratégias de Controlo
 1 Estratégias de Controlo Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que
1 Estratégias de Controlo Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que
1) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:
 Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda:") 1) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda: 2 o motor Posição desejada da junta = 45 o Avalia o sinal de entrada e envia um sinal ao atuador ENCODER 43 o
1) Em relação a figura abaixo relativa a um sistema de controle em malha fechada responda: 2 o motor Posição desejada da junta = 45 o Avalia o sinal de entrada e envia um sinal ao atuador ENCODER 43 o
Aula 11 Realimentação
 Portfolio MEEC 1 Aula 11 Realimentação Objectivos Apresentar a estrutura básica e explicar o Funcionamento do controlo por realimentação.. Portfolio MEEC 2 Um exemplo introdutório: O segway Portfolio MEEC
Portfolio MEEC 1 Aula 11 Realimentação Objectivos Apresentar a estrutura básica e explicar o Funcionamento do controlo por realimentação.. Portfolio MEEC 2 Um exemplo introdutório: O segway Portfolio MEEC
Anexo A PROJECTO DAS ESTRUTURAS MECÂNICAS
 Anexo A PROJECTO DAS ESTRUTURAS MECÂNICAS Resumo : Neste anexo são apresentadas as várias fases do projecto e construção das estruturas de reforço e de suporte dos novos elementos a introduzir, bem como
Anexo A PROJECTO DAS ESTRUTURAS MECÂNICAS Resumo : Neste anexo são apresentadas as várias fases do projecto e construção das estruturas de reforço e de suporte dos novos elementos a introduzir, bem como
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes
 Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
Retroacção Linear de Variáveis de Estado
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas para auto-estudo sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 03 J. M. Lemos,
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas para auto-estudo sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 03 J. M. Lemos,
Terminologia: Tipos de Variáveis
 Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que queremos manter nos valores
Carla C. Pinheiro DEQB - IST 1 Terminologia: Tipos de Variáveis As variáveis de saída são variáveis dependentes que nos dão informação sobre o estado interno do sistema, e que queremos manter nos valores
Capítulo 11. Projeto por Intermédio da Resposta de Freqüência
 Capítulo 11 Projeto por Intermédio da Resposta de Freqüência Fig. 11.1 Gráficos de Bode mostrando o ajuste de ganho para uma margem de fase desejada Fase (graus) Aumento de ganho necessário 2 Fig. 11.2
Capítulo 11 Projeto por Intermédio da Resposta de Freqüência Fig. 11.1 Gráficos de Bode mostrando o ajuste de ganho para uma margem de fase desejada Fase (graus) Aumento de ganho necessário 2 Fig. 11.2
1. SISTEMAS DE CONTROLE: CONCEITOS. Prof. JOSÉ RODRIGO DE OLIVEIRA
 1. SISTEMAS DE CONTROLE: CONCEITOS Prof. JOSÉ RODRIGO DE OLIVEIRA 1. INTRODUÇÃO Sistemas de Controle: surgiu da necessidade de entendimento e controle de materiais e forças da natureza para o benefício
1. SISTEMAS DE CONTROLE: CONCEITOS Prof. JOSÉ RODRIGO DE OLIVEIRA 1. INTRODUÇÃO Sistemas de Controle: surgiu da necessidade de entendimento e controle de materiais e forças da natureza para o benefício
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Capítulo 8. Técnicas do Lugar das Raízes
 Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
Modelação, Identificação e Controlo Digital
 Modelação, Identificação e Controlo Digital 1-Aspectos Gerais 1 Modelação, Identificação e Controlo Digital Semestre de Inverno 2005/2006 Área Científica de Sistemas de Decisão e Controlo Modelação, Identificação
Modelação, Identificação e Controlo Digital 1-Aspectos Gerais 1 Modelação, Identificação e Controlo Digital Semestre de Inverno 2005/2006 Área Científica de Sistemas de Decisão e Controlo Modelação, Identificação
Jules Verne Leagues Under the Sea. Tópicos
 Robótica Subaquática The great depths of the ocean are entirely unknown to us. Soundings cannot reach them. What passes in those remote depths we can scarcely conjecture. Jules Verne - 20000 Leagues Under
Robótica Subaquática The great depths of the ocean are entirely unknown to us. Soundings cannot reach them. What passes in those remote depths we can scarcely conjecture. Jules Verne - 20000 Leagues Under
hardware software software computador microcontrolador hardware sensores sistema de controle de malha fechada.
 Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Controlo por Computador. Primeiro Teste
 MEEC, MAero Controlo por Computador 2014/2015 Primeiro Teste 5 de Novembro de 2014, 20 horas salas QA, Q01 Quotação: P1 a) 2 b) 2 c) 2; P2 a) 3, b) 1, c) 1, P3 4, P4 a) 1 b) 3 c) 1. Duração: 2 horas. Não
MEEC, MAero Controlo por Computador 2014/2015 Primeiro Teste 5 de Novembro de 2014, 20 horas salas QA, Q01 Quotação: P1 a) 2 b) 2 c) 2; P2 a) 3, b) 1, c) 1, P3 4, P4 a) 1 b) 3 c) 1. Duração: 2 horas. Não
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores. Controlo 2003/2004. Controlo de velocidade de um motor D.C.
 Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2003/2004 Controlo de velocidade de um motor D.C. Realizado por : E. Morgado 1 e F. M. Garcia 2 -Março de
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2003/2004 Controlo de velocidade de um motor D.C. Realizado por : E. Morgado 1 e F. M. Garcia 2 -Março de
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Controlo Em Espaço de Estados. Trabalho de Laboratório nº 2
 Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 2 Controlo por Retroacção do Estado de um Braço Robot Flexível J. Miranda Lemos
Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2010/11 Trabalho de Laboratório nº 2 Controlo por Retroacção do Estado de um Braço Robot Flexível J. Miranda Lemos
Capítulo 7. Erros de Estado Estacionário
 Capítulo 7 Erros de Estado Estacionário Tabela 7.1 Formas de onda dos sinais de teste para o cálculo dos erros de estado estacionário em sistemas de controle de posição Forma de onda Nome Degrau Rampa
Capítulo 7 Erros de Estado Estacionário Tabela 7.1 Formas de onda dos sinais de teste para o cálculo dos erros de estado estacionário em sistemas de controle de posição Forma de onda Nome Degrau Rampa
Introdução ao Sistema de Controle
 Introdução ao Sistema de Controle 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Controle é o ato de exercer comando sobre uma variável de um sistema para que esta variável siga um determinado
Introdução ao Sistema de Controle 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Controle é o ato de exercer comando sobre uma variável de um sistema para que esta variável siga um determinado
2ª Avaliação - Controle Automático II (CTR 03) Prof. Accacio
 Prof. Accacio") Data de Entrega do relatório e apresentação do trabalho: 06/05/2017 Pontuação da atividade: 30pts Objetivo - Projetar um Controlador para o sistema de estudo (sorteado) através dos Métodos do Lugar das
Data de Entrega do relatório e apresentação do trabalho: 06/05/2017 Pontuação da atividade: 30pts Objetivo - Projetar um Controlador para o sistema de estudo (sorteado) através dos Métodos do Lugar das
OCJEF 2007 Ocupação Científica de Jovens em Férias
 OCJEF 2007 Ocupação Científica de Jovens em Férias ACSDC/DEEC Área Científica de Sistemas, Decisão e Controlo Departamento de Engenharia Electrotécnica e de Computadores Instituto Superior Técnico 2006/2007
OCJEF 2007 Ocupação Científica de Jovens em Férias ACSDC/DEEC Área Científica de Sistemas, Decisão e Controlo Departamento de Engenharia Electrotécnica e de Computadores Instituto Superior Técnico 2006/2007
O controle automático tem desempenhado um papel fundamental no avanço da engenharia e da ciência. Ex: sistemas de veículos espaciais, sistemas de
 1º Capitulo O controle automático tem desempenhado um papel fundamental no avanço da engenharia e da ciência. Ex: sistemas de veículos espaciais, sistemas de direcionamento de mísseis, sistemas robóticos
1º Capitulo O controle automático tem desempenhado um papel fundamental no avanço da engenharia e da ciência. Ex: sistemas de veículos espaciais, sistemas de direcionamento de mísseis, sistemas robóticos
AG V AUTOMATIC GUIDED VEHICLE. Grupo 3 Bruno Ramos Nº Rui Ramos Nº Sérgio Calado Nº 46702
 AG V Grupo 3 Bruno Ramos Nº 46494 Rui Ramos Nº 46693 Sérgio Calado Nº 46702 INTRODUÇÃO O que são AGVs? Quais as suas aplicações? Capacidade de carga. Sistemas de Referência. Comunicação. Problemas nos
AG V Grupo 3 Bruno Ramos Nº 46494 Rui Ramos Nº 46693 Sérgio Calado Nº 46702 INTRODUÇÃO O que são AGVs? Quais as suas aplicações? Capacidade de carga. Sistemas de Referência. Comunicação. Problemas nos
CONTROLE DE ÂNGULO DE AZIMUTE DE ANTENA DE RASTREAMENTO
 UFRJ Escola Politécnica Eng. Eletrônica e de Computação EEL660 Controle Linear 1 Avaliação Complementar 2017-1 CONTROLE DE ÂNGULO DE AZIMUTE DE ANTENA DE RASTREAMENTO Neste trabalho você deverá modelar,
UFRJ Escola Politécnica Eng. Eletrônica e de Computação EEL660 Controle Linear 1 Avaliação Complementar 2017-1 CONTROLE DE ÂNGULO DE AZIMUTE DE ANTENA DE RASTREAMENTO Neste trabalho você deverá modelar,
Controle II. Márcio J. Lacerda. 2 o Semestre Departamento de Engenharia Elétrica Universidade Federal de São João del-rei
 Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
20,2 CV (15,1 kw) a r/ min 18 CV (13,4 kw) a r/min. 20 CV (14,9 kw) 18 CV (13,4 kw) (gasolina) De série
 a r/ min 18 CV (13,4 kw) a r/min. 20 CV (14,9 kw) 18 CV (13,4 kw) (gasolina) De série") 2500 Motor: Motor Diesel: Modelo John Deere Série 220, de 3 cilindros Potência conforme norma ECE-R24 20,2 CV (15,1 kw) a 3.600 r/ min 18 CV (13,4 kw) a 3.000 r/min Motor Gasolina: Modelo Kawasaki, V Twin,
2500 Motor: Motor Diesel: Modelo John Deere Série 220, de 3 cilindros Potência conforme norma ECE-R24 20,2 CV (15,1 kw) a 3.600 r/ min 18 CV (13,4 kw) a 3.000 r/min Motor Gasolina: Modelo Kawasaki, V Twin,
Controlo Em Espaço de Estados. Trabalho de Laboratório nº 3
 Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2008/09 Trabalho de Laboratório nº 3 Controlo Adaptativo do Nível de um Tanque J. Miranda Lemos e Alexandre Bernardino
Mestrado em Engenharia Electrotécnica e de Computadores Controlo Em Espaço de Estados 2008/09 Trabalho de Laboratório nº 3 Controlo Adaptativo do Nível de um Tanque J. Miranda Lemos e Alexandre Bernardino
Controle de Processos Aula: Introdução ao controle de processos
 107484 Controle de Processos Aula: Introdução ao controle de processos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti
107484 Controle de Processos Aula: Introdução ao controle de processos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E. S. Tognetti
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores. Controlo 2005/2006
 Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2005/2006 Controlo digital de velocidade e de posição de um motor D.C. Elaborado por E. Morgado 1 e F. M.
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2005/2006 Controlo digital de velocidade e de posição de um motor D.C. Elaborado por E. Morgado 1 e F. M.
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
Dinâmica de um metrónomo básico
 Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 013/14 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Laboratórios de CONTROLO (LEE) (Controlador Centrífugo)
 (Controlador Centrífugo)") Laboratórios de CONTROLO (LEE) 1 o Trabalho Realimentação (Controlador Centrífugo) João Miguel Raposo Sanches 1 o Semestre 2005/2006 Instituto Superior Técnico (Tagus Park) 1 2 1 Introdução Neste trabalho
Laboratórios de CONTROLO (LEE) 1 o Trabalho Realimentação (Controlador Centrífugo) João Miguel Raposo Sanches 1 o Semestre 2005/2006 Instituto Superior Técnico (Tagus Park) 1 2 1 Introdução Neste trabalho
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 0 J. M. Lemos, IST P. Considere
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Controlo em Espaço de Estados Problemas sobre Retroacção Linear de Variáveis de Estado J. Miranda Lemos 0 J. M. Lemos, IST P. Considere
Automação de Processos Industriais 2010 / Filipe Fernandes David Cerdeira 55181
 Automação de Processos Industriais 2010 / 2011 Filipe Fernandes 55097 David Cerdeira 55181 Tópicos Introdução aos Sensores Sensores Ópticos Sensores de Indução Sensores de Som Microfone Sensores de Distância/
Automação de Processos Industriais 2010 / 2011 Filipe Fernandes 55097 David Cerdeira 55181 Tópicos Introdução aos Sensores Sensores Ópticos Sensores de Indução Sensores de Som Microfone Sensores de Distância/
CONTROLO. 3º ano 1º semestre Transparências de apoio às aulas teóricas. Capítulo Projecto Nyquist/Bode
 CONROLO 3º ano º semestre 202-203 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
CONROLO 3º ano º semestre 202-203 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
ÍNDICE Restrições impostas pela máquina eléctrica e pelo conversor Efeitos parasitas... 42
 ÍNDICE l-introdução 1.1 - Generalidades. 1.2 - Natureza multidisciplinar dos accionamentos electrornecânicos.................................... 4 1.3 - Referências históricas 7 1.4 - Objectivos e organização
ÍNDICE l-introdução 1.1 - Generalidades. 1.2 - Natureza multidisciplinar dos accionamentos electrornecânicos.................................... 4 1.3 - Referências históricas 7 1.4 - Objectivos e organização
INTRODUÇÃO A ROBÓTICA. Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira
 INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
INTRODUÇÃO A ROBÓTICA Prof. MSc. Luiz Carlos Branquinho Caixeta Ferreira Um Efetuador é um dispositivo do robô que exerce um efeito sobre o ambiente. Variam desde pernas e rodas até braços e dedos. O controlador
Câmara 3D. Projectos 2000/2001
 Câmara 3D O projecto consiste na utilização e processamento de imagens adquiridas por um sistema que regista os dados de um veículo móvel e já desenvolvido no DEE. O sistema foi desenvolvido para armazenar
Câmara 3D O projecto consiste na utilização e processamento de imagens adquiridas por um sistema que regista os dados de um veículo móvel e já desenvolvido no DEE. O sistema foi desenvolvido para armazenar
Pontifícia Universidade Católica de Goiás. Prof: Marcos Lajovic Carneiro Aluno (a): Sistemas de Controle I
: Sistemas de Controle I") Pontifícia Universidade Católica de Goiás Projeto de Escola de Engenharia ENG 3502 Controle de Processos Controle I Prof: Marcos Lajovic Carneiro Aluno (a): Sistemas de Controle I Estudo de Caso Antena
Pontifícia Universidade Católica de Goiás Projeto de Escola de Engenharia ENG 3502 Controle de Processos Controle I Prof: Marcos Lajovic Carneiro Aluno (a): Sistemas de Controle I Estudo de Caso Antena
Aula 12 Simulação em computador
 Portfolio MEEC 1 Aula 12 Simulação em computador Objectivos Introdução ao conceito de modelo e simulação em computador, usando um exemplo muito simples baseado no NXT. Portfolio MEEC 2 Por vezes é inadequado
Portfolio MEEC 1 Aula 12 Simulação em computador Objectivos Introdução ao conceito de modelo e simulação em computador, usando um exemplo muito simples baseado no NXT. Portfolio MEEC 2 Por vezes é inadequado
MULTICARREGADORA TELESCÓPICA
 MULTICARREGADORA TELESCÓPICA 535-125 Multicarregadora CARACTERÍSTICAS PRINCIPAIS A Altura Total: B Largura máxima: G Comprimento ao porta-garfos: Comprimento total: 2.590 2.350 5.840 7.040 PESO: 9.410kg
MULTICARREGADORA TELESCÓPICA 535-125 Multicarregadora CARACTERÍSTICAS PRINCIPAIS A Altura Total: B Largura máxima: G Comprimento ao porta-garfos: Comprimento total: 2.590 2.350 5.840 7.040 PESO: 9.410kg
CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID)
") CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID) AÇÕES DE CONTROLE O controlador PID é um controlador composto por três ações de controle Ação proporcional: u t = k e t Ação integral: u t = k 0 t
CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID) AÇÕES DE CONTROLE O controlador PID é um controlador composto por três ações de controle Ação proporcional: u t = k e t Ação integral: u t = k 0 t
Prof. Heraldo L. S. Almeida. Introdução aos Sistemas de Controle
 1 Introdução aos Sistemas de Controle 1. Introdução aos Sistemas de Controle 1.1. O que é Controle? 1.2. Composição de um Sistema de Controle 1.3. Controle Manual x Automático 1.4. Os Efeitos da Realimentação
1 Introdução aos Sistemas de Controle 1. Introdução aos Sistemas de Controle 1.1. O que é Controle? 1.2. Composição de um Sistema de Controle 1.3. Controle Manual x Automático 1.4. Os Efeitos da Realimentação
4 Bancada Experimental e Aquisição de Dados
 4 Bancada Experimental e Aquisição de Dados Com o objetivo de avaliar e complementar a análise das equações matemáticas desenvolvidas no capítulo 2, faz-se necessário realizar práticas experimentais. Com
4 Bancada Experimental e Aquisição de Dados Com o objetivo de avaliar e complementar a análise das equações matemáticas desenvolvidas no capítulo 2, faz-se necessário realizar práticas experimentais. Com
WL 44 Carregadoras articuladas de rodas
 WL 44 Carregadoras articuladas de rodas Por isso remove as coisas rápido - em qualquer aplicação. WL 54 A carregadora sobre rodas articulada WL 54 oferece potência, manobrabilidade e eficiência, tudo em
WL 44 Carregadoras articuladas de rodas Por isso remove as coisas rápido - em qualquer aplicação. WL 54 A carregadora sobre rodas articulada WL 54 oferece potência, manobrabilidade e eficiência, tudo em
FEUP 4º ano LEEC Produção e Transporte de Energia I Enunciados de Problemas sobre Cálculo Mecânico Ano Lectivo de 2005/06
 FEUP 4º ano LEEC Produção e Transporte de Energia I Enunciados de Problemas sobre Cálculo Mecânico Ano Lectivo de 2005/06 Problema 1 Uma linha aérea a 150 KV está implantada numa zona costeira, sendo as
FEUP 4º ano LEEC Produção e Transporte de Energia I Enunciados de Problemas sobre Cálculo Mecânico Ano Lectivo de 2005/06 Problema 1 Uma linha aérea a 150 KV está implantada numa zona costeira, sendo as
CONTROLO MEEC. 1º semestre 2016/2017. Transparências de apoio às aulas teóricas. Capítulo 12 Projecto Nyquist/Bode. Isabel Ribeiro António Pascoal
 CONROLO MEEC º semestre 206/207 ransparências de apoio às aulas teóricas Capítulo 2 Projecto Nyquist/Bode Isabel Ribeiro António Pascoal CONROLO º sem 206/207 odos os direitos reservados Estas notas não
CONROLO MEEC º semestre 206/207 ransparências de apoio às aulas teóricas Capítulo 2 Projecto Nyquist/Bode Isabel Ribeiro António Pascoal CONROLO º sem 206/207 odos os direitos reservados Estas notas não
Alexandre Bernardino, Margarida Silveira, J. Miranda Lemos
 Mestrado Integrado em Engenharia Aeroespacial 2009/2010 - Semestre de Inverno Controlo Óptimo e Adaptativo TRABALHO DE LABORATÓRIO Identificação e Controlo Digital do Sistema de Posicionamento de uma Barra
Mestrado Integrado em Engenharia Aeroespacial 2009/2010 - Semestre de Inverno Controlo Óptimo e Adaptativo TRABALHO DE LABORATÓRIO Identificação e Controlo Digital do Sistema de Posicionamento de uma Barra
Motores Elétricos Lineares
 Prof. Antonio Carlos Ferreira Universidade Federal do Rio de Janeiro Programa de Engenharia Elétrica ferreira@ufrj.br Organização Princípio de funcionamento Classificação Aplicações transportes Comentários
Prof. Antonio Carlos Ferreira Universidade Federal do Rio de Janeiro Programa de Engenharia Elétrica ferreira@ufrj.br Organização Princípio de funcionamento Classificação Aplicações transportes Comentários
Laboratório de Turbomáquinas
 UNIVERSIDADE TÉCNICA DE LISBOA INSTITUTO SUPERIOR TÉCNICO Licenciatura em Engenharia Mecânica Mecânica dos Fluidos II Laboratório de Turbomáquinas Trabalho realizado por : Adelino Fernandes Nº48434 Ana
UNIVERSIDADE TÉCNICA DE LISBOA INSTITUTO SUPERIOR TÉCNICO Licenciatura em Engenharia Mecânica Mecânica dos Fluidos II Laboratório de Turbomáquinas Trabalho realizado por : Adelino Fernandes Nº48434 Ana
TRANSMISSÃO DE CALOR
 INSTITUTO SUPERIOR TÉCNICO UNIVERSIDADE TÉCNICA DE LISBOA TRANSMISSÃO DE CALOR Guia do Laboratório: Estudo Experimental da Relação entre os Números de Nusselt, Reynolds e Prandtl Mário Manuel Gonçalves
INSTITUTO SUPERIOR TÉCNICO UNIVERSIDADE TÉCNICA DE LISBOA TRANSMISSÃO DE CALOR Guia do Laboratório: Estudo Experimental da Relação entre os Números de Nusselt, Reynolds e Prandtl Mário Manuel Gonçalves
SINAIS E SISTEMAS MECATRÓNICOS
 SINAIS E SISTEMAS MECATRÓNICOS Laboratório #4 1 : Projecto, implementação e validação da cadeia de actuação e medida Mestrado Integrado em Engenharia Mecânica Novembro 2011 ou Dezembro 2011 Realizar na
SINAIS E SISTEMAS MECATRÓNICOS Laboratório #4 1 : Projecto, implementação e validação da cadeia de actuação e medida Mestrado Integrado em Engenharia Mecânica Novembro 2011 ou Dezembro 2011 Realizar na
MULTICARREGADORA TELESCÓPICA T SW
 MULTICARREGADORA TELESCÓPICA 540-170T SW Multicarregadora CARACTERÍSTICAS PRINCIPAIS A Altura Total: B Largura máxima: G Comprimento ao porta-garfos: Comprimento total: 2.690 2.440 6.360 7.560 PESO: 12.470kg
MULTICARREGADORA TELESCÓPICA 540-170T SW Multicarregadora CARACTERÍSTICAS PRINCIPAIS A Altura Total: B Largura máxima: G Comprimento ao porta-garfos: Comprimento total: 2.690 2.440 6.360 7.560 PESO: 12.470kg
TRANSDUTORES E AQUISIÇÃO DE DADOS
 TRANSDUTORES E AQUISIÇÃO DE DADOS O QUE É UM TRANSDUTOR? Aparelho de medida que transforma uma grandeza física / química (temperatura, deslocamento, alcalinidade, etc.) num sinal mensurável (sinal eléctrico,
TRANSDUTORES E AQUISIÇÃO DE DADOS O QUE É UM TRANSDUTOR? Aparelho de medida que transforma uma grandeza física / química (temperatura, deslocamento, alcalinidade, etc.) num sinal mensurável (sinal eléctrico,
Transdutores de Efeito de Hall. Indice
 Indice Introdução...3 Transdutor...3 Sensor...3 Transdutor Magnético ou de efeito Hall...3 Efeito de Hall...4 Efeito Hall Introdução... 4 Efeito Hall Teoria... 4 Efeito de Hall Matematicamente... 6 Diversos
Indice Introdução...3 Transdutor...3 Sensor...3 Transdutor Magnético ou de efeito Hall...3 Efeito de Hall...4 Efeito Hall Introdução... 4 Efeito Hall Teoria... 4 Efeito de Hall Matematicamente... 6 Diversos
Processo térmico multivariável apropriado para controlo por computador
 Processo térmico multivariável apropriado para controlo por computador Manual de utilização Faculdade de Engenharia de Universidade do Porto 2002 António Paulo Gomes Mendes Moreira Paulo Gomes da Costa
Processo térmico multivariável apropriado para controlo por computador Manual de utilização Faculdade de Engenharia de Universidade do Porto 2002 António Paulo Gomes Mendes Moreira Paulo Gomes da Costa
Sistema automático para impressão de informação em garrafas de gás. Memória Descritiva
 Sistema automático para impressão de informação em garrafas de gás Memória Descritiva Vulgarmente o transporte de gás para consumo é feito em garrafas. A imagem seguinte ilustra o que, de forma genérica,
Sistema automático para impressão de informação em garrafas de gás Memória Descritiva Vulgarmente o transporte de gás para consumo é feito em garrafas. A imagem seguinte ilustra o que, de forma genérica,
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS
 SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
SISTEMAS ROBOTIZADOS CAPÍTULO 7 CONTROLE INDEPENDENTE DAS JUNTAS Leitura Sugerida: Spong, (Seções 7.1-7.3) 1 Capítulo 7 Motivação Discutiremos neste capítulo uma estratégia de controle denominada CONTROLE
Dinâmica de um metrónomo básico
 Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Modelação e Simulação 01/13 Trabalho de Laboratório nº 3 Dinâmica de um metrónomo básico Objectivos Após realizar este trabalho, o aluno deverá ser capaz de: 1. Representar as equações do modelo de estado
Controle de Processos Aula: Introdução ao controle de processos
 107484 Controle de Processos Aula: Introdução ao controle de processos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2015 E. S. Tognetti
107484 Controle de Processos Aula: Introdução ao controle de processos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2015 E. S. Tognetti
Fig (continuação) b. Diagrama de Bode para o sistema do Exemplo 10.13
 b. Diagrama de Bode para o sistema do Exemplo 10.13") Fig. 10.50 (continuação) b. Diagrama de Bode para o sistema do Exemplo 10.13 Fase (graus) 1 Fig. 10.51 Gráficos logarítmicos de magnitude de Bode típicos não normalizados e sem escala mostrando o valor
Fig. 10.50 (continuação) b. Diagrama de Bode para o sistema do Exemplo 10.13 Fase (graus) 1 Fig. 10.51 Gráficos logarítmicos de magnitude de Bode típicos não normalizados e sem escala mostrando o valor
Tr E. TrE o4/o5. O Segway TRACÇÃO ELÉCTRICA
 Tracção Eléctrica 2008 o4/o5 /////////////////////////////////////////////////////////////////////////////////////////////////////// O Segway Recentemente surgiu a notícia da adopção pela Polícia unicipal
Tracção Eléctrica 2008 o4/o5 /////////////////////////////////////////////////////////////////////////////////////////////////////// O Segway Recentemente surgiu a notícia da adopção pela Polícia unicipal
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Universidade Federal do Paraná - Engenharia Mecânica DEMEC Prof. Alessandro Marques Disciplina: Sistemas de Medições 1 (Exercícios)
") 1) Um manômetro foi construído com estes módulos: a) Transdutor extensométrico Faixa de medição: 0 a 20 bar Sensibilidade: 2 mv/bar Incerteza Expandida (U TE ): ± 0,02 mv b) Amplificador Faixa de medição:
1) Um manômetro foi construído com estes módulos: a) Transdutor extensométrico Faixa de medição: 0 a 20 bar Sensibilidade: 2 mv/bar Incerteza Expandida (U TE ): ± 0,02 mv b) Amplificador Faixa de medição:
Reabilitação e Reforço de Estruturas
 Mestrado em Engenharia Civil 2011 / 2012 Reabilitação e Reforço de Estruturas Aula 06: Métodos de inspecção e diagnóstico. 6.3. Termografia de infra-vermelho. Eduardo S. Júlio 1/22 João Ramos ESTG Leiria
Mestrado em Engenharia Civil 2011 / 2012 Reabilitação e Reforço de Estruturas Aula 06: Métodos de inspecção e diagnóstico. 6.3. Termografia de infra-vermelho. Eduardo S. Júlio 1/22 João Ramos ESTG Leiria
O QUE É ENERGIA? CONVERSÃO DE ENERGIA ELÉCTRICA. É o princípio de tudo.
 1 O QUE É ENERGIA? É o princípio de tudo. Energia é a força que movimenta todos os corpos do Universo. Esta afirmação contém em si mesma um erro; consegue identificá-lo? Energia é a capacidade de produzir
1 O QUE É ENERGIA? É o princípio de tudo. Energia é a força que movimenta todos os corpos do Universo. Esta afirmação contém em si mesma um erro; consegue identificá-lo? Energia é a capacidade de produzir
SEM561 - SISTEMAS DE CONTROLE
 SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
SEM561 - SISTEMAS DE CONTROLE Adriano Almeida Gonçalves Siqueira Aula 1 - Introdução a Sistemas de Controle Índice O que é controle? Exemplo 1: componentes de um sistema de controle Exemplo 2: malha aberta
Conceitos Básicos de Automação. Prof. Jeferson L. Curzel 2019/01
 Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2019/01 Exemplo Motivador Furação manual: operador usava os olhos, o tato e a contração dos músculos avaliava a evolução do furo na madeira, decidindo
Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2019/01 Exemplo Motivador Furação manual: operador usava os olhos, o tato e a contração dos músculos avaliava a evolução do furo na madeira, decidindo
CONCEITOS EM CONTROLE. Introdução Não Matemática
 CONCEITOS EM CONTROLE Introdução Não Matemática SISTEMAS O objeto de estudo da área de controle são os sistemas. Sistemas são conjuntos de elementos interconectados que trocam informação Como a teoria
CONCEITOS EM CONTROLE Introdução Não Matemática SISTEMAS O objeto de estudo da área de controle são os sistemas. Sistemas são conjuntos de elementos interconectados que trocam informação Como a teoria
Temática Máquinas Eléctricas Capítulo Máquina Síncrona Secção LIGAÇÃO À REDE INTRODUÇÃO
 Temática Máquinas Eléctricas Capítulo Máquina Síncrona Secção LIGAÇÃO À REDE INTRODUÇÃO Esta primeira página contém uma apresentação genérica do recurso. pré-requisitos: nível : Bases de Engenharia Electrotécnica
Temática Máquinas Eléctricas Capítulo Máquina Síncrona Secção LIGAÇÃO À REDE INTRODUÇÃO Esta primeira página contém uma apresentação genérica do recurso. pré-requisitos: nível : Bases de Engenharia Electrotécnica
3ª Ficha Global de Física 12º ano
 3ª Ficha Global de Física 12º ano Todos os cálculos devem ser apresentados de modo claro e sucinto Note: 1º - as figuras não estão desenhadas a escala; Adopte quando necessário: g = 10 m.s 2 G = 6,67 10-11
3ª Ficha Global de Física 12º ano Todos os cálculos devem ser apresentados de modo claro e sucinto Note: 1º - as figuras não estão desenhadas a escala; Adopte quando necessário: g = 10 m.s 2 G = 6,67 10-11
EXERCÍCIOS FÍSICA 10. e problemas Exames Testes intermédios Professor Luís Gonçalves
 FÍSICA 10 EXERCÍCIOS e problemas Exames 2006 2007 2008 2009 2010 2011 Testes intermédios 2008 2009 2010 2011 Escola Técnica Liceal Salesiana do Estoril Professor Luís Gonçalves 2 3 Unidade 1 Do Sol ao
FÍSICA 10 EXERCÍCIOS e problemas Exames 2006 2007 2008 2009 2010 2011 Testes intermédios 2008 2009 2010 2011 Escola Técnica Liceal Salesiana do Estoril Professor Luís Gonçalves 2 3 Unidade 1 Do Sol ao
SENSORES. Acelerômetro. Sensor de temperatura. Sensor de luminosidade. Interruptor de lâminas. Sensor potenciômetro. Encoder incremental
 SENSORES São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e que transmitem um sinal para um dispositivo de medição ou controle informando a variação
SENSORES São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e que transmitem um sinal para um dispositivo de medição ou controle informando a variação
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO SUL CAMPUS RIO GRANDE INSTRUMENTAÇÃO INDUSTRIAL
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO SUL CAMPUS RIO GRANDE INSTRUMENTAÇÃO INDUSTRIAL Aula 24 2 TERMÔMETROS DE RADIAÇÃO São medidores de temperatura sem contato. Os componentes
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO SUL CAMPUS RIO GRANDE INSTRUMENTAÇÃO INDUSTRIAL Aula 24 2 TERMÔMETROS DE RADIAÇÃO São medidores de temperatura sem contato. Os componentes
5. Síntese de leis de controlo usando técnicas polinomiais
 1 5. Síntese de leis de controlo usando técnicas polinomiais Objectivo: Projectar controladores discretos lineares por colocação de pólos, recorrendo a descrições entrada/saída do processo Referência:
1 5. Síntese de leis de controlo usando técnicas polinomiais Objectivo: Projectar controladores discretos lineares por colocação de pólos, recorrendo a descrições entrada/saída do processo Referência:
Indíce. Injetora Ciclo Rápido. Injetora Servo Motor. Linhas de Produtos. Injetora 2 Placas
 Taiwan Indíce 01 05 Injetora Ciclo Rápido Injetora Servo Motor 09 10 Linhas de Produtos Injetora 2 Placas Alta tecnologia com baixo consumo de energia aliada ao alto desempenho com excelente custo benefício.
Taiwan Indíce 01 05 Injetora Ciclo Rápido Injetora Servo Motor 09 10 Linhas de Produtos Injetora 2 Placas Alta tecnologia com baixo consumo de energia aliada ao alto desempenho com excelente custo benefício.
 G Classe de Emissões Stage III-B (Tier 4i) Modelo Número de Cilindros Diâmetro x Curso Cilindrada Potência Máxima Binário Máximo 1104D - 44TA Motor Diesel 4 em linha 105 x 127 mm 4.400 cc 74.5
G Classe de Emissões Stage III-B (Tier 4i) Modelo Número de Cilindros Diâmetro x Curso Cilindrada Potência Máxima Binário Máximo 1104D - 44TA Motor Diesel 4 em linha 105 x 127 mm 4.400 cc 74.5
Aula 3 Programação. LEGO NXT-G
 Portfolio MEEC 1 Aula 3 Programação. LEGO NXT-G Objectivo Introdução à programação do LEGO NXT-2, que será usado no lab. Portfolio MEEC 2 O que é um programa de computador? Conjunto de instruções que visam
Portfolio MEEC 1 Aula 3 Programação. LEGO NXT-G Objectivo Introdução à programação do LEGO NXT-2, que será usado no lab. Portfolio MEEC 2 O que é um programa de computador? Conjunto de instruções que visam
Fundamentos de Controlo
 Licenciatura em Engenharia Electrónica LEE - IST Fundamentos de Controlo 1º semestre 2012-2013 Guia de trabalho de Laboratório Controlo de um motor d.c. elaborado por: Eduardo Morgado Outubro 2012 I. Introdução
Licenciatura em Engenharia Electrónica LEE - IST Fundamentos de Controlo 1º semestre 2012-2013 Guia de trabalho de Laboratório Controlo de um motor d.c. elaborado por: Eduardo Morgado Outubro 2012 I. Introdução
Controle e Servomecanismos I
 Controle e Servomecanismos I Introdução Sistemas de controle com e sem retroalimentação São de enorme importância científica, tecnológica e econômica com aplicações em Telecom, transportes, navegação,
Controle e Servomecanismos I Introdução Sistemas de controle com e sem retroalimentação São de enorme importância científica, tecnológica e econômica com aplicações em Telecom, transportes, navegação,
CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID)
") CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID) AÇÕES DE CONTROLE O controlador PID é um controlador composto por três ações de controle Ação proporcional: u t = k e t Ação integral: u t = k 0 t
CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO (PID) AÇÕES DE CONTROLE O controlador PID é um controlador composto por três ações de controle Ação proporcional: u t = k e t Ação integral: u t = k 0 t
PRIMA SUPER e CERES SUPER. Grandes semeadoras para culturas de inverno
 PRIMA SUPER e CERES SUPER Grandes semeadoras para culturas de inverno Catálogo Português Abr/2016 PRIMA SUPER A Prima Super é uma semeadora para culturas de inverno. Sua principal característica é a uniformidade
PRIMA SUPER e CERES SUPER Grandes semeadoras para culturas de inverno Catálogo Português Abr/2016 PRIMA SUPER A Prima Super é uma semeadora para culturas de inverno. Sua principal característica é a uniformidade