UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS DA TERRA DEPARTAMENTO DE GEOMÁTICA GEOMETRIA EPIPOLAR. Prof. Alvaro Muriel Lima Machado
|
|
|
- Giovanna Bugalho
- 5 Há anos
- Visualizações:
Transcrição
1 UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIAS DA TERRA DEPARTAMENTO DE GEOMÁTICA GEOMETRIA EPIPOLAR Prof Alvaro Muriel Lima Machado 1

2 Geometria epipolar 2
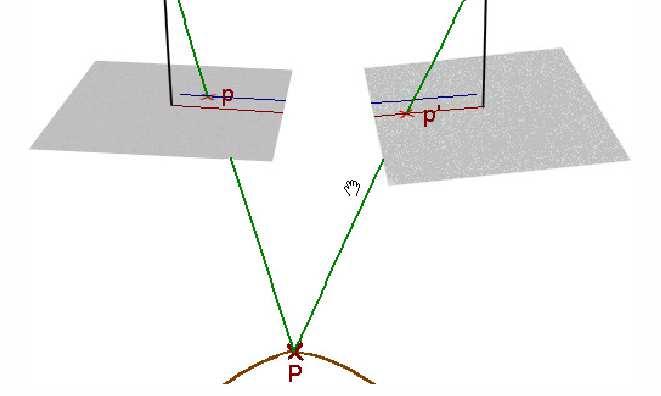
3 Geometria epipolar Segmento base: interliga os dois centros de projeção C e C ; 3
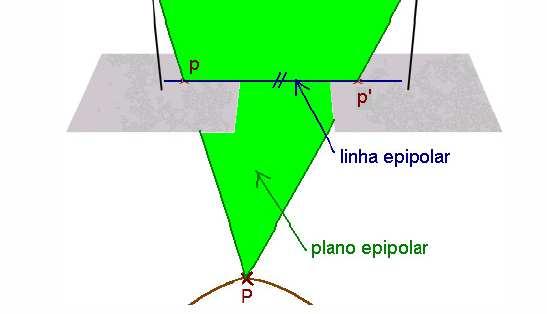
4 Geometria epipolar Plano epipolar: todos os planos que contêm o segmento base; 4
5 Geometria epipolar Linhas epipolares: intersecções do plano epipolar com as imagens; 5
6 Geometria epipolar Epipolos: intersecções da linha que passa pelos centros de projeção (base estendida) com os planos das imagens 6
7 Geometria epipolar Geralmente os epipolos não se encontram dentro dos limites físicos das imagens 7
8 Geometria epipolar Em imagens paralelas ao segmento base (normalizadas) os epipolos ficam no infinito 8


9 Geometria epipolar Fonte: Schenk,
10 Geometria epipolar Muitos algoritmos de visão computacional e fotogrametria digital assumem que os pares de fotografias estejam dispostos de forma que suas feições conjugadas apareçam na mesma linha Esta configuração é freqüentemente referida como registro em geometria epipolar Ela epressa o fato de que as linhas epipolares são relacionadas com as linhas das imagens Esta condição é satisfeita quando os eios das câmaras de um sistema de visão estéreo são paralelos entre si e perpendiculares à base das câmaras 10
11 Geometria epipolar O termo imagens em geometria epipolar, freqüentemente usado, não epressa o seu significado porque o conceito de geometria epipolar é independente da orientação particular do estereopar Para epressar o fato de que linhas epipolares devem ser paralelas às linhas das imagens (confinando entidades conjugadas a uma mesma linha), Schenk (1999) recomenda a utilização do termo imagens normalizadas 11
12 Geometria epipolar Imagens normalizadas simplificam o processo de pesquisa de pontos conjugados em um estereopar porque eles se encontram em uma mesma linha Isto repretava uma enorme vantagem computacional no passado, mas considerando a sempre crescente capacidade de processamento, esta vantagem se torna menos significativa, muito embora ainda importante Para dificultar mais, as imagens normalizadas se relacionam com os estereopares; cada novo estereopar eige novas imagens normalizadas 12
13 Geometria epipolar Para se obter imagens normalizadas, a partir de sua posição original, deve-se efetuar uma transformação tal que os eios das câmaras se tornem perpendiculares ao segmento base Além disso, os eios devem estar contidos em um plano que contenha o segmento base Pode-se imaginar facilmente o infinito número de posições normalizadas obtidas pela rotação do plano com os eios das câmaras em torno do segmento base 13
14 Objetivo Geral: Facilitar a busca (automática) de feições homólogas em um estereopar (par de imagens consecutivas que apretam sobreposição) Objetivo Específico: Enquadrar uma mesma feição em linhas idênticas de duas imagens digitais 14
15 Transformação de imagem original para normalizada O enfoque utilizado para o cálculo de imagens normalizadas eige que as orientações interior e eterior de um par de fotografias sejam conhecidas Com os parâmetros de orientação interior pode-se sempre mudar entre coordenadas de imagem (coluna e linha) e fotocoordenadas (mm) A orientação eterior das imagens originais fornece três ângulos de rotação e as posições dos respectivos centros de projeção de ambas as imagens 15
16 Transformação de imagem original para normalizada A transformação das imagens originais para imagens normalizadas pode ser pensada como consistindo em dois passos Primeiro, as imagens são convertidas para sua verdadeira posição vertical, e daí para sua posição normalizada A primeira transformação, a partir da posição original para a vertical verdadeira, envolve simplesmente uma rotação com a matriz de rotação transposta R T da orientação eterior A seguir, a imagem é transformada de vertical verdadeira para sua posição normalizada Isto envolve rotacionar a imagem vertical verdadeira em torno do segmento base Assim, necessita-se da matriz de rotação da base, denotada por R b 16
17 A matriz de normalização é o produto de duas matrizes: a matriz de rotação da imagem original para a imagem vertical verdadeira, e a matriz de rotação da base R T R = R R N Como é a transposta da matriz de rotação da orientação eterior, ela é diferente para cada imagem e deve ser determinada para ambas as imagens do estereopar b T 17
18 BX = X C X C BY = Y C Y C BZ = Z C Z C BY = arctan BX φ = arctan BX BZ 2 + BY 2 + Ω = 2 Fonte: Adaptado de Schenk,
19 cos cos cos + + = cos cos cos cos cos cos cos cos cos cos cos cos cos cos ),, ( M com outra ordem de rotação R R = cos cos cos cos cos cos cos cos cos cos cos cos cos cos ),, ( M Segue-se que, para calcular e tem-se a alternativa: E D tg M M = = cos cos cos ),, ( ),, ( = M M arctg
20 Transformação de imagem original para normalizada Ω A rotação influencia a forma geométrica das imagens reamostradas para a geometria epipolar Sempre que se rotaciona imagens, a área abrangida se torna MAIOR A fim de otimizar a área útil do estereograma, adota-se o valor médio dos ângulos 20
21 Fonte: Schenk,
22 T1 = Orientação Interior 22 + = 2 1)* ( 2 1)* ( 0 0 y L C y P N P N L C P P y Se origem CSE = (0,0) e y são fotocoordenadas (em mm), e C e L são coordenadas de imagem; P e P y repretam o tamanho do piel segundo os eios X e Y, respectivamente; N C e N L repretam a qtde total de colunas e linhas na imagem, respectivamente
23 T1 = Orientação Interior 23 e y são fotocoordenadas (em mm), e C e L são coordenadas de imagem; P e P y repretam o tamanho do piel segundo os eios X e Y, respectivamente; N C e N L repretam a qtde total de colunas e linhas na imagem, respectivamente = 2 1)* ( 2 1)* ( 0 0 y L C y P N P N L C P P y Se origem CSE = (1,1)
24 Fonte: Schenk,
25 y n n T2 = Transformação Colinear ou Projetiva = = f f n n r r r r r + r + r + r y y y y r r r r f f f f com a seguinte função inversa (Kraus, 1992) 0 = f0 y0 = f0 r r r r n n n n + r + r + r + r y y y y n n n n r r r r f f f f n n n n 25
26 Fonte: Schenk,
27 Resolução das imagens normalizadas Sempre que se rotaciona imagens, a área abrangida se torna MAIOR Preservação do Tamanho de piel T Q = Dist / T Preservação da Quantidade de piels Q T = Dist / Q As imagens normalizadas de um estereopar tem como característica: - Mesmo tamanho de piel; - Mesma quantidade de linhas 27
28 Resolução das imagens normalizadas 1) A partir dos quatro cantos das imagens originais determinam-se os limites das fotocoordenadas no espaço das imagens normalizadas; quais sejam: min e, ma e, y min e, y ma e (imagem normalizada da esquerda) min d, ma d, y min d, y ma d (imagem normalizada da direita) 2) Os limites em y são empregados para a determinação da qtde de linhas e os limites em para a determinação de colunas, usando-se a relação com o tamanho do piel; 3) Define-se desta forma a origem e os tamanhos das imagens normalizadas 28

29 Fonte: Schenk,
30 T4 = Processo de reamostragem 30
31 T4 = Processo de reamostragem Método de Reamostragem Vizinho mais próimo Interpolação bilinear Splines bicúbicas Polinômio de Lagrange Entorno de interpolações Adições Multiplicações Erros de Interpolação ,7% ,7% ,3% Apro 0 Fonte: ANDRADE, J BITTENCOURT Fotogrametria SBEE Curitiba,
32 T4 = Processo de reamostragem Vizinho mais próimo R(k,l) = A(i,j) para d < 0,5 e dy < 0,5 R(k,l) = A(i+1,j) para d 0,5 e dy < 0,5 R(k,l) = A(i,j+1) para d < 0,5 e dy 0,5 R(k,l) = A(i+1,j+1) para d 0,5 e dy 0,5 Fonte: ANDRADE, J BITTENCOURT Fotogrametria SBEE Curitiba,
33 T4 = Processo de reamostragem Interpolação bilinear R(k,l) = A(i,j) + + d*(a(i+1,j) - A(i,j)) + + dy*(a(i,j+1) A(i,j)) + + d*dy*(a(i,j) A(i+1,j) A(i,j+1) +A(i+1,j+1)) Fonte: ANDRADE, J BITTENCOURT Fotogrametria SBEE Curitiba,
34 T4 = Processo de reamostragem Splines bicúbicas df ( ) = para < 1 df ( ) = para 1 < 2 df ( ) = 0 para 2 a(n) = A(i-1,j+n-2)*df(d+1) + + A(i,j+n-2)*df(d) + + A(i+1,j+n-2)*df(d-1) + + A(i+2,j+n-2)*df(d-2) para n = 1,2,3,4 R(k,l) = a(1)*df(dy+1) + a(2)*df(dy) + + a(3)*df(dy-1) + a(4)*df(dy-2) Fonte: ANDRADE, J BITTENCOURT Fotogrametria SBEE Curitiba,
35 T4 = Processo de reamostragem Polinômio de Lagrange a(n) = A(i-1,j+n-2)*(d-1)*(d-2)*d/(-6) + + A(i,j+n-2)*(d+1)*(d-1)*(d-2)/2 + + A(i+1,j+n-2)*(d+1)*(d-2)*d/(-2) + + A(i+2,j+n-2)*(d+1)*(d-1)*d/6 para n = 1,2,3,4 A(k,l) = a(1)*(dy-1)*(dy-2)*dy/(-6) + + a(2)*(dy+1)*(dy-1)*(dy-2)/2 + + a(3)*(dy+1)*(dy-2)*dy/(-2) + + a(4)*(dy+1)*(dy-1)*dy/6 Fonte: ANDRADE, J BITTENCOURT Fotogrametria SBEE Curitiba,
36 REFERÊNCIAS 01 ANDRADE, J BITTENCOURT Fotogrametria SBEE Curitiba, AUGUSTO, Eduardo G G Normalização de Estereogramas e sua Aplicação na Geração de Modelos Numéricos de Elevações Rio de Janeiro, 1999 Dissertação (Mestrado em Ciências Cartográficas) Secretaria de Ciência e Tecnologia, Instituto Militar de Engenharia 03 CHO, Woosug; SCHENK, Toni; MADANI, Mustafá Resampling Digital Imagery to Epipolar Geometry OSU, Columbus, KRAUS, Karl Photogrammetry Volume 1 - Fundamentals and Standard Processes Verlag, Bonn, LUGNANI, João Bosco Introdução à Fototriangulação Imprensa Universitária da UFPR, Curitiba, MIKHAIL, E M; BETHEL, J S; MCGLONE, J C Introduction to Modern Photogrammetry John Wiley & Sons, Inc New York, SCHENK, Toni Digital Photogrammetry Vol I TerraScience - Ohio, STRAUCH, J C Mercedes Correlação de Imagens Digitais Curitiba, 1991 Dissertação (Mestrado em Geociências) - Setor de Tecnologia, Universidade Federal do Paraná 36
37 37
UD VI. Retificação / Normalização de Imagens Digitais
 - 56 - UD VI Retificação / Normalização de Imagens Digitais Extração Automática do Terreno Retificação de Imagens Geometria Epipolar Normalização de Estereograma Exemplo de Algoritmo de Reamostragem Epipolar
- 56 - UD VI Retificação / Normalização de Imagens Digitais Extração Automática do Terreno Retificação de Imagens Geometria Epipolar Normalização de Estereograma Exemplo de Algoritmo de Reamostragem Epipolar
FOTOGRAMETRIA II. (notas de aulas)
") 1 FOTOGRAMETRIA II (notas de aulas) TEORIA DAS ORIENTAÇÕES (ANALÓGICA): Precisão da restituição analógica. Presidente Prudente 2016 Sumário 1. CONSIDERAÇÕES INICIAIS... 3 2. PRECISÃO DA RESTITUIÇÃO NO
1 FOTOGRAMETRIA II (notas de aulas) TEORIA DAS ORIENTAÇÕES (ANALÓGICA): Precisão da restituição analógica. Presidente Prudente 2016 Sumário 1. CONSIDERAÇÕES INICIAIS... 3 2. PRECISÃO DA RESTITUIÇÃO NO
9. GERAÇÃO DE ORTO-IMAGENS
 9. GERAÇÃO DE ORTO-IMAGENS 9.1 CONCEITO INICIAL Com os conhecimentos acumulados até aqui, o nome ortoimagem traz à tona uma definição simples para o tema: imagens em perspectiva ortogonal. As imagens adquiridas
9. GERAÇÃO DE ORTO-IMAGENS 9.1 CONCEITO INICIAL Com os conhecimentos acumulados até aqui, o nome ortoimagem traz à tona uma definição simples para o tema: imagens em perspectiva ortogonal. As imagens adquiridas
8. GERAÇÃO DE MODELOS NUMÉRICOS DE ELEVAÇÕES
 8. GERAÇÃO DE MODELOS NUMÉRICOS DE ELEVAÇÕES 8.1 CONCEITO INICIAL A modelagem digital do terreno é um conceito relativamente novo. As pesquisas iniciais nesta área são creditadas ao Professor Charles L.
8. GERAÇÃO DE MODELOS NUMÉRICOS DE ELEVAÇÕES 8.1 CONCEITO INICIAL A modelagem digital do terreno é um conceito relativamente novo. As pesquisas iniciais nesta área são creditadas ao Professor Charles L.
5. ORIENTAÇÃO EXTERIOR
 5. ORIENTAÇÃO EXTERIOR 5.1 CONCEITO INICIAL O objetivo primordial da orientação exterior (ou externa) é a obtenção da posição e atitude de cada foto em relação ao referencial do espaço objeto. Essa situação
5. ORIENTAÇÃO EXTERIOR 5.1 CONCEITO INICIAL O objetivo primordial da orientação exterior (ou externa) é a obtenção da posição e atitude de cada foto em relação ao referencial do espaço objeto. Essa situação
PMR2560 Visão Computacional Visão estéreo. Prof. Eduardo L. L. Cabral
 PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
Fotogrametria Digital. Unidades Didáticas
 Unidades Didáticas UD I Conceitos Básicos 06h UD II Geração de Imagens Fotogramétricas Digitais 06h UD III Orientação Interior de uma Imagem Fotogramétrica Digital - 08h UD IV Medição Automática de Pontos
Unidades Didáticas UD I Conceitos Básicos 06h UD II Geração de Imagens Fotogramétricas Digitais 06h UD III Orientação Interior de uma Imagem Fotogramétrica Digital - 08h UD IV Medição Automática de Pontos
Conceitos Primitivos: são conceitos adotados sem definição.
 Geometria Plana Geometria Espacial Conceitos Primitivos: são conceitos adotados sem definição. 1. Ponto P Características: Não possui dimensão Sua representação geométrica é indicada por letra maiúscula
Geometria Plana Geometria Espacial Conceitos Primitivos: são conceitos adotados sem definição. 1. Ponto P Características: Não possui dimensão Sua representação geométrica é indicada por letra maiúscula
Álgebra Linear I - Aula Forma diagonal de uma matriz diagonalizável
 Álgebra Linear I - Aula 18 1 Forma diagonal de uma matriz diagonalizável 2 Matrizes ortogonais Roteiro 1 Forma diagonal de uma matriz diagonalizável Sejam A uma transformação linear diagonalizável, β =
Álgebra Linear I - Aula 18 1 Forma diagonal de uma matriz diagonalizável 2 Matrizes ortogonais Roteiro 1 Forma diagonal de uma matriz diagonalizável Sejam A uma transformação linear diagonalizável, β =
Introdução ao Processamento e. Síntese de Imagens. Introdução ao Processamento e. Síntese de Imagens: Introdução. Objetivos da disciplina
 Introdução ao Processamento e : Introdução Objetivos da disciplina Introdução ao Processamento e Entender, desenvolver e aplicar os principais algoritmos de processamento de imagens, bem como os fundamentos
Introdução ao Processamento e : Introdução Objetivos da disciplina Introdução ao Processamento e Entender, desenvolver e aplicar os principais algoritmos de processamento de imagens, bem como os fundamentos
Paralaxe, Ponto Flutuante e Escala. Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia
 Paralaxe, Ponto Flutuante e Escala Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Paralaxe ou Paralaxe Estereoscópica ou Paralaxe em X É o deslocamento aparente de um objeto, em relação
Paralaxe, Ponto Flutuante e Escala Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Paralaxe ou Paralaxe Estereoscópica ou Paralaxe em X É o deslocamento aparente de um objeto, em relação
A Fotogrametria Digital
 A Fotogrametria Digital Fotogrametria Digital O que é a fotogrametria Digital? A Fotogrametria Digital é a parte da fotogrametria que trata dos aspectos geométricos do uso de fotografias, com a finalidade
A Fotogrametria Digital Fotogrametria Digital O que é a fotogrametria Digital? A Fotogrametria Digital é a parte da fotogrametria que trata dos aspectos geométricos do uso de fotografias, com a finalidade
Projeto Fotogramétrico. Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia
 Projeto Fotogramétrico Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Projeto Fotogramétrico No planejamento de um projeto fotogramétrico aéreas, três fases são estreitamente interligadas.
Projeto Fotogramétrico Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Projeto Fotogramétrico No planejamento de um projeto fotogramétrico aéreas, três fases são estreitamente interligadas.
UD VII. Geração do Modelo Numérico de Elevações
 69 UD VII Geração do Modelo Numérico de Elevações Origem Nomenclatura Utilizada Aquisição de Dados Construção da Grade Estratégia Básica para Extração Automática do MNE Problemas na Extração Automática
69 UD VII Geração do Modelo Numérico de Elevações Origem Nomenclatura Utilizada Aquisição de Dados Construção da Grade Estratégia Básica para Extração Automática do MNE Problemas na Extração Automática
7. RETIFICAÇÃO E NORMALIZAÇÃO DE IMAGENS
 7. RETIFICAÇÃO E NORMALIZAÇÃO DE IMAGENS 7.1 CONCEITO INICIAL Segundo (Andrade, 1998), retificar uma imagem consiste em projetá-la, segundo seu próprio feixe perspectivo, para um plano horizontal. Isso
7. RETIFICAÇÃO E NORMALIZAÇÃO DE IMAGENS 7.1 CONCEITO INICIAL Segundo (Andrade, 1998), retificar uma imagem consiste em projetá-la, segundo seu próprio feixe perspectivo, para um plano horizontal. Isso
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
Álgebra Linear I - Aula Bases Ortonormais e Matrizes Ortogonais
 Álgebra Linear I - Aula 19 1. Bases Ortonormais e Matrizes Ortogonais. 2. Matrizes ortogonais 2 2. 3. Rotações em R 3. Roteiro 1 Bases Ortonormais e Matrizes Ortogonais 1.1 Bases ortogonais Lembre que
Álgebra Linear I - Aula 19 1. Bases Ortonormais e Matrizes Ortogonais. 2. Matrizes ortogonais 2 2. 3. Rotações em R 3. Roteiro 1 Bases Ortonormais e Matrizes Ortogonais 1.1 Bases ortogonais Lembre que
Programa Analítico de Disciplina ENF310 Fotogrametria e Fotointerpretação
 0 Programa Analítico de Disciplina ENF30 Fotogrametria e Fotointerpretação Departamento de Engenharia Florestal - Centro de Ciências Agrárias Número de créditos: 4 Teóricas Práticas Total Duração em semanas:
0 Programa Analítico de Disciplina ENF30 Fotogrametria e Fotointerpretação Departamento de Engenharia Florestal - Centro de Ciências Agrárias Número de créditos: 4 Teóricas Práticas Total Duração em semanas:
Tratamento da Imagem Transformações (cont.)
") Universidade Federal do Rio de Janeiro - IM/DCC & NCE Tratamento da Imagem Transformações (cont.) Antonio G. Thomé thome@nce.ufrj.br Sala AEP/33 Transformações Geométricas 3 Transformações Geométricas
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Tratamento da Imagem Transformações (cont.) Antonio G. Thomé thome@nce.ufrj.br Sala AEP/33 Transformações Geométricas 3 Transformações Geométricas
Curso de Geomática Aula 2. Prof. Dr. Irineu da Silva EESC-USP
 Curso de Geomática Aula Prof. Dr. Irineu da Silva EESC-USP Sistemas de Coordenadas Determinar a posição de um ponto, em Geomática, significa calcular as suas coordenadas. Calcular as coordenadas de um
Curso de Geomática Aula Prof. Dr. Irineu da Silva EESC-USP Sistemas de Coordenadas Determinar a posição de um ponto, em Geomática, significa calcular as suas coordenadas. Calcular as coordenadas de um
étodos uméricos SISTEMAS DE EQUAÇÕES LINEARES (Continuação) Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
 Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA") étodos uméricos SISTEMAS DE EQUAÇÕES LINEARES (Continuação) Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA DE PESQUISA CENTRO
étodos uméricos SISTEMAS DE EQUAÇÕES LINEARES (Continuação) Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA DE PESQUISA CENTRO
1 Matrizes Ortogonais
 Álgebra Linear I - Aula 19-2005.1 Roteiro 1 Matrizes Ortogonais 1.1 Bases ortogonais Lembre que uma base β é ortogonal se está formada por vetores ortogonais entre si: para todo par de vetores distintos
Álgebra Linear I - Aula 19-2005.1 Roteiro 1 Matrizes Ortogonais 1.1 Bases ortogonais Lembre que uma base β é ortogonal se está formada por vetores ortogonais entre si: para todo par de vetores distintos
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
 Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Reconstrução Geométrica a Partir de Imagens TIC /TCC
 Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.24 Aula 7 Conteúdo Cálculo da Matriz Fundamental Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/204.2/tic-00.243
Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.24 Aula 7 Conteúdo Cálculo da Matriz Fundamental Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/204.2/tic-00.243
E- Correção Geométrica
 E- Correção Geométrica A retificação ou correção geométrica da imagem é o processo que permite a imagem assumir propriedades cartográficas de sistema de projeção e respectivas coordenadas. É uma de transformação
E- Correção Geométrica A retificação ou correção geométrica da imagem é o processo que permite a imagem assumir propriedades cartográficas de sistema de projeção e respectivas coordenadas. É uma de transformação
Programa Analítico de Disciplina EAM313 Topografia IV
 0 Programa Analítico de Disciplina Departamento de Engenharia Civil - Centro de Ciências Exatas e Tecnológicas Número de créditos: 4 Teóricas Práticas Total Duração em semanas: 15 Carga horária semanal
0 Programa Analítico de Disciplina Departamento de Engenharia Civil - Centro de Ciências Exatas e Tecnológicas Número de créditos: 4 Teóricas Práticas Total Duração em semanas: 15 Carga horária semanal
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
GERAÇÃO DE MODELO DIGITAL DE TERRENO UTILIZANDO CORRELAÇÃO COM IMAGENS COLORIDAS
 ISSN 98-65, p. 7-78 GERAÇÃO DE MODELO DIGITAL DE TERRENO UTILIZANDO CORRELAÇÃO COM IMAGENS COLORIDAS PAULO HENRIQUE AMORIM DA SILVA ANTONIO MARIA GARCIA TOMMASELLI MAURICIO GALO Universidade Estadual Paulista
ISSN 98-65, p. 7-78 GERAÇÃO DE MODELO DIGITAL DE TERRENO UTILIZANDO CORRELAÇÃO COM IMAGENS COLORIDAS PAULO HENRIQUE AMORIM DA SILVA ANTONIO MARIA GARCIA TOMMASELLI MAURICIO GALO Universidade Estadual Paulista
Transformações Geométricas para Visualização 3D
 Sistemas Gráficos para Engenharia - M. Gattass & L. F. Martha Março - 8 Transformações Geométricas para Visualiação 3D por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando
Sistemas Gráficos para Engenharia - M. Gattass & L. F. Martha Março - 8 Transformações Geométricas para Visualiação 3D por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando
6. AEROTRIANGULAÇÃO ANALÍTICA
 6. AEROTRIANGULAÇÃO ANALÍTICA 6.1 REVISÃO INICIAL No capítulo anterior, foi apresentada a resseção espacial como método de obtenção dos seis parâmetros da orientação exterior (X 0, Y 0, Z 0, φ, ω e κ)
6. AEROTRIANGULAÇÃO ANALÍTICA 6.1 REVISÃO INICIAL No capítulo anterior, foi apresentada a resseção espacial como método de obtenção dos seis parâmetros da orientação exterior (X 0, Y 0, Z 0, φ, ω e κ)
GEOMETRIA DE POSIÇÃO
 GEOMETRIA DE POSIÇÃO 1- Conceitos primitivos 1.1- Ponto Não possui dimensão. Representado por letras maiúsculas. A B C 1.2 - Reta É unidimensional, possuindo comprimento infinito. Não possui largura ou
GEOMETRIA DE POSIÇÃO 1- Conceitos primitivos 1.1- Ponto Não possui dimensão. Representado por letras maiúsculas. A B C 1.2 - Reta É unidimensional, possuindo comprimento infinito. Não possui largura ou
Compreendendo os efeitos da projeção nas imagens aéreas. Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia
 Compreendendo os efeitos da projeção nas imagens aéreas Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Geometria das Fotografias Aéreas A fotografia cônica ou é uma projeção central,
Compreendendo os efeitos da projeção nas imagens aéreas Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Geometria das Fotografias Aéreas A fotografia cônica ou é uma projeção central,
EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A CALIBRAÇÃO DOS PARÂMETROS INTRÍNSECOS DE CÂMERAS Projeto de Pesquisa PIBIC/CNPq ( )
") USP UNIVERSIDADE DE SÃO PAULO EP ESCOLA POLITÉCNICA EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A CALIBRAÇÃO DOS PARÂMETROS INTRÍNSECOS DE CÂMERAS Projeto de Pesquisa PIBIC/CNPq (2000-2001) LEONARDO
USP UNIVERSIDADE DE SÃO PAULO EP ESCOLA POLITÉCNICA EXTRAÇÃO SEMI - AUTOMÁTICA DE FEIÇÕES LINEARES E A CALIBRAÇÃO DOS PARÂMETROS INTRÍNSECOS DE CÂMERAS Projeto de Pesquisa PIBIC/CNPq (2000-2001) LEONARDO
Restituição / Pontos de Apoio. Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia
 Restituição / Pontos de Apoio Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Restituição Fotogramétrica Os processos aerofotogramétricos comportam duas fases principais, bem distintas,
Restituição / Pontos de Apoio Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Restituição Fotogramétrica Os processos aerofotogramétricos comportam duas fases principais, bem distintas,
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC Visão Computacional Reconstrução por stéreo Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 11 IC ramal 5981 ópicos da aula Auto-calibração de um par estéreo Análise da matri
CC Visão Computacional Reconstrução por stéreo Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 11 IC ramal 5981 ópicos da aula Auto-calibração de um par estéreo Análise da matri
UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba. Transformações Geométricas
 UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba Transformações Geométricas .(x,y, P).(x,y, P) Imagem fonte Imagem transformada Deve-se notar que, como uma imagem digital é representada por uma matriz
UNIVERSIDADE ESTADUAL PAULISTA Campus de Sorocaba Transformações Geométricas .(x,y, P).(x,y, P) Imagem fonte Imagem transformada Deve-se notar que, como uma imagem digital é representada por uma matriz
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Visão Computacional CPS754
 Visão Computacional CPS754 aula 13 - reconstrução Antonio Oliveira Ricardo Marroquim 1 / 26 visão computacional tópicos reprojetando pontos para 3D triangulação simples solução ótima definição do último
Visão Computacional CPS754 aula 13 - reconstrução Antonio Oliveira Ricardo Marroquim 1 / 26 visão computacional tópicos reprojetando pontos para 3D triangulação simples solução ótima definição do último
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
(x 1, y 1 ) (x 2, y 2 ) = (x 1 x 2, y 1 y 2 ); e α (x, y) = (x α, y α ), α R.
 (x 2, y 2 ) = (x 1 x 2, y 1 y 2 ); e α (x, y) = (x α, y α ), α R.") INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-2457 Álgebra Linear para Engenharia I Terceira Lista de Exercícios - Professor: Equipe da Disciplina EXERCÍCIOS 1. Considere as retas
INSTITUTO DE MATEMÁTICA E ESTATÍSTICA UNIVERSIDADE DE SÃO PAULO MAT-2457 Álgebra Linear para Engenharia I Terceira Lista de Exercícios - Professor: Equipe da Disciplina EXERCÍCIOS 1. Considere as retas
Aula 24 mtm B GEOMETRIA ESPACIAL
 Aula 24 mtm B GEOMETRIA ESPACIAL Entes Geométricos Ponto A T Reta r s Plano Espaço y α z x Entes Geométricos Postulados ou Axiomas Teorema a 2 = b 2 + c 2 S i =180 Determinação de uma reta Posições relativas
Aula 24 mtm B GEOMETRIA ESPACIAL Entes Geométricos Ponto A T Reta r s Plano Espaço y α z x Entes Geométricos Postulados ou Axiomas Teorema a 2 = b 2 + c 2 S i =180 Determinação de uma reta Posições relativas
REPRESENTAÇÃO DO RELEVO
 REPRESENTÇÃO DO RELEVO Parte II Perfil e declividade Profª. Érica S. Matos Departamento de Geomática Setor de Ciências da Terra Universidade Federal do Paraná -UFPR PERFIL São cortes verticais ao longo
REPRESENTÇÃO DO RELEVO Parte II Perfil e declividade Profª. Érica S. Matos Departamento de Geomática Setor de Ciências da Terra Universidade Federal do Paraná -UFPR PERFIL São cortes verticais ao longo
Segue, abaixo, o Roteiro de Estudo para a Verificação Global 2 (VG2), que acontecerá no dia 03 de abril de º Olímpico Matemática I
, que acontecerá no dia 03 de abril de º Olímpico Matemática I") 6º Olímpico Matemática I Sistema de numeração romano. Situações problema com as seis operações com números naturais (adição, subtração, multiplicação, divisão, potenciação e radiciação). Expressões numéricas
6º Olímpico Matemática I Sistema de numeração romano. Situações problema com as seis operações com números naturais (adição, subtração, multiplicação, divisão, potenciação e radiciação). Expressões numéricas
- Aula 6 - Visualização 3D: Projeções
 - Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
- Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
Exemplo de aplicação
 Exemplo de aplicação Paralaxe O conceito de paralaxe está relacionado com o deslocamento relativo ou aparente dos objetos estacionários, quando um observador em movimento os olha de pontos diferentes.
Exemplo de aplicação Paralaxe O conceito de paralaxe está relacionado com o deslocamento relativo ou aparente dos objetos estacionários, quando um observador em movimento os olha de pontos diferentes.
Solução Comentada Prova de Matemática
 18. Se f é uma função real de variável real definida por f() = a + b + c, onde a, b e c são números reais negativos, então o gráfico que melhor representa a derivada de f é: A) y B) y C) y D) y E) y Questão
18. Se f é uma função real de variável real definida por f() = a + b + c, onde a, b e c são números reais negativos, então o gráfico que melhor representa a derivada de f é: A) y B) y C) y D) y E) y Questão
Rotação e Interpolação
 Rotação e Interpolação Resumo O objetivo desse artigo é mostrar como é feita a rotação em qualquer ângulo de imagens 2D, bem como apresentar dois métodos de interpolação de pontos vizinho mais próximo
Rotação e Interpolação Resumo O objetivo desse artigo é mostrar como é feita a rotação em qualquer ângulo de imagens 2D, bem como apresentar dois métodos de interpolação de pontos vizinho mais próximo
Autovalores e Autovetores
 Autovalores e Autovetores Maria Luísa B. de Oliveira SME0300 Cálculo Numérico 24 de novembro de 2010 Introdução Objetivo: Dada matriz A, n n, determinar todos os vetores v que sejam paralelos a Av. Introdução
Autovalores e Autovetores Maria Luísa B. de Oliveira SME0300 Cálculo Numérico 24 de novembro de 2010 Introdução Objetivo: Dada matriz A, n n, determinar todos os vetores v que sejam paralelos a Av. Introdução
ELAINE REIS COSTA GERAÇÃO AUTOMÁTICA DE MODELOS DIGITAIS DE TERRENO A PARTIR DE IMAGENS DE CÂMARAS DIGITAIS. Dissertação de Mestrado
 ELAINE REIS COSTA GERAÇÃO AUTOMÁTICA DE MODELOS DIGITAIS DE TERRENO A PARTIR DE IMAGENS DE CÂMARAS DIGITAIS Dissertação de Mestrado Presidente Prudente 2006 Elaine Reis Costa GERAÇÃO AUTOMÁTICA DE MODELOS
ELAINE REIS COSTA GERAÇÃO AUTOMÁTICA DE MODELOS DIGITAIS DE TERRENO A PARTIR DE IMAGENS DE CÂMARAS DIGITAIS Dissertação de Mestrado Presidente Prudente 2006 Elaine Reis Costa GERAÇÃO AUTOMÁTICA DE MODELOS
RECONSTRUÇÃO AUTOMÁTICA DE ESTEREOMODELOS A PARTIR DE PARÂMETROS DE ORIENTAÇÃO DIRETA DO SENSOR
 RECONSTRUÇÃO AUTOMÁTICA DE ESTEREOMODELOS A PARTIR DE PARÂMETROS DE ORIENTAÇÃO DIRETA DO SENSOR Automatic Stereo Model Reconstruction Using Directly Measured Orientation Parameters ROBERTO DA SILVA RUY
RECONSTRUÇÃO AUTOMÁTICA DE ESTEREOMODELOS A PARTIR DE PARÂMETROS DE ORIENTAÇÃO DIRETA DO SENSOR Automatic Stereo Model Reconstruction Using Directly Measured Orientation Parameters ROBERTO DA SILVA RUY
próximo artigo Geometria de aquisição de estereopares em câmeras de imageamento linear de sensores orbitais passivos Abstract.
 Geometria de aquisição de estereopares em câmeras de imageamento linear de sensores orbitais passivos Felipe André Lima Costa 1 Oscar Ricardo Vergara 2 1 Centro de Imagens e Informações Geográficas do
Geometria de aquisição de estereopares em câmeras de imageamento linear de sensores orbitais passivos Felipe André Lima Costa 1 Oscar Ricardo Vergara 2 1 Centro de Imagens e Informações Geográficas do
Uso de dados LIDAR na calibração de câmeras de baixo custo. Graziella Valença de Souza 1 Edson Aparecido Mitishita 1 Alvaro Muriel Lima Machado 1
 Uso de dados LIDAR na calibração de câmeras de baixo custo Graziella Valença de Souza 1 Edson Aparecido Mitishita 1 Alvaro Muriel Lima Machado 1 1 Universidade Federal do Paraná - UFPR Setor de Ciências
Uso de dados LIDAR na calibração de câmeras de baixo custo Graziella Valença de Souza 1 Edson Aparecido Mitishita 1 Alvaro Muriel Lima Machado 1 1 Universidade Federal do Paraná - UFPR Setor de Ciências
UTILIZAÇÃO DE MODELOS ESTEREOSCÓPICOS HÍBRIDOS NA ATUALIZAÇÃO CARTOGRÁFICA
 3 UTILIZAÇÃO DE MODELOS ESTEREOSCÓPICOS HÍBRIDOS NA ATUALIZAÇÃO CARTOGRÁFICA The use of hybrid stereopair in present cartography Amilton Amorim 1 Irineu da Silva² Antonio Maria Garcia Tommaselli 1 1 Universidade
3 UTILIZAÇÃO DE MODELOS ESTEREOSCÓPICOS HÍBRIDOS NA ATUALIZAÇÃO CARTOGRÁFICA The use of hybrid stereopair in present cartography Amilton Amorim 1 Irineu da Silva² Antonio Maria Garcia Tommaselli 1 1 Universidade
UD V. Orientação Exterior
 UD V Orientação Exterior Conceitos Básicos Matriz de Rotação Resseção Espacial Condição de Colinearidade Modelo Matemático Ajustamento pelo MMQ Aproximações Iniciais Implementação do Algoritmo UD V - Orientação
UD V Orientação Exterior Conceitos Básicos Matriz de Rotação Resseção Espacial Condição de Colinearidade Modelo Matemático Ajustamento pelo MMQ Aproximações Iniciais Implementação do Algoritmo UD V - Orientação
Séries Numéricas 2,10,12,16,17,18,19,? 2,4,6,8,10,? 2,4,8,16,32,?
 SÉRIES NUMÉRICAS Séries Numéricas Uma série numérica é uma sequencia de números que respeita uma regra, uma lei de formação. Sendo assim todos foram produzidos à partir de uma mesma ideia. Exemplos: 2,10,12,16,17,18,19,?
SÉRIES NUMÉRICAS Séries Numéricas Uma série numérica é uma sequencia de números que respeita uma regra, uma lei de formação. Sendo assim todos foram produzidos à partir de uma mesma ideia. Exemplos: 2,10,12,16,17,18,19,?
Curso de Geometria Analítica
 Curso de Geometria Analítica Abrangência: Graduação em Engenharia e Matemática - Professor Responsável: Anastassios H. Kambourakis Resumo Teórico 10 - Posições relativas entre Pontos Retas e Planos. I.
Curso de Geometria Analítica Abrangência: Graduação em Engenharia e Matemática - Professor Responsável: Anastassios H. Kambourakis Resumo Teórico 10 - Posições relativas entre Pontos Retas e Planos. I.
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
1 Vetores no Plano e no Espaço
 1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
1 Vetores no Plano e no Espaço Definimos as componentes de um vetor no espaço de forma análoga a que fizemos com vetores no plano. Vamos inicialmente introduzir um sistema de coordenadas retangulares no
Conceitos de vetores. Decomposição de vetores
 Conceitos de vetores. Decomposição de vetores 1. Introdução De forma prática, o conceito de vetor pode ser bem assimilado com auxílio da representação matemática de grandezas físicas. Figura 1.1 Grandezas
Conceitos de vetores. Decomposição de vetores 1. Introdução De forma prática, o conceito de vetor pode ser bem assimilado com auxílio da representação matemática de grandezas físicas. Figura 1.1 Grandezas
Modelagem Cinemática de Robôs Industriais. Prof. Assoc. Mário Luiz Tronco
 Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Modelagem Cinemática de Robôs Industriais Prof. Assoc. Mário Luiz Tronco Transformação direta de coordenadas 1 2... N Variáveis de junta Variáveis cartesianas Transformação inversa de coordenadas Transformação
Geometria Analítica. Estudo do Plano. Prof Marcelo Maraschin de Souza
 Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Computacional
 Geometria Computacional Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Aspectos teóricos e práticos Construção e análise de algoritmos e estruturas de dados para a solucionar problemas geométricos
Geometria Computacional Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Aspectos teóricos e práticos Construção e análise de algoritmos e estruturas de dados para a solucionar problemas geométricos
Álgebra Linear e Geometria Analítica
 Instituto Politécnico de Viseu Escola Superior de Tecnologia Departamento: Matemática Álgebra Linear e Geometria Analítica Curso: Engenharia Electrotécnica Ano: 1 o Semestre: 1 o Ano Lectivo: 007/008 Ficha
Instituto Politécnico de Viseu Escola Superior de Tecnologia Departamento: Matemática Álgebra Linear e Geometria Analítica Curso: Engenharia Electrotécnica Ano: 1 o Semestre: 1 o Ano Lectivo: 007/008 Ficha
Matemática Matrizes e Determinantes
 . (Unesp) Um ponto P, de coordenadas (x, y) do a plano cartesiano ortogonal, é representado pela matriz 5. (Unicamp) Considere a matriz M b a, onde coluna assim como a matriz coluna b a e b são números
. (Unesp) Um ponto P, de coordenadas (x, y) do a plano cartesiano ortogonal, é representado pela matriz 5. (Unicamp) Considere a matriz M b a, onde coluna assim como a matriz coluna b a e b são números
PERPENDICULARIDADES. Sumário:
 9 PERPENDICULARIDADES Neste capítulo estudam-se as retas e os planos nas suas relações de paralelismo e de perpendicularidade, nas diferentes possibilidades: retas com retas, planos com planos e retas
9 PERPENDICULARIDADES Neste capítulo estudam-se as retas e os planos nas suas relações de paralelismo e de perpendicularidade, nas diferentes possibilidades: retas com retas, planos com planos e retas
AVALIAÇÃO DO SISTEMA CÂMARA DE VÍDEO + NU-VIEW PARA RECONSTRUÇÃO DE SUPERFÍCIES À CURTA DISTÂNCIA
 AVALIAÇÃO DO SISTEMA CÂMARA DE VÍDEO + NU-VIEW PARA RECONSTRUÇÃO DE SUPERFÍCIES À CURTA DISTÂNCIA Assessment of video camera + Nu-View system for close-range surface reconstruction Antônio de Oliveira
AVALIAÇÃO DO SISTEMA CÂMARA DE VÍDEO + NU-VIEW PARA RECONSTRUÇÃO DE SUPERFÍCIES À CURTA DISTÂNCIA Assessment of video camera + Nu-View system for close-range surface reconstruction Antônio de Oliveira
próximo artigo artigo anterior
 Uma modelagem para o algoritmo baseado em áreas aplicado aos pares estereoscópicos do sensor CCD-CBERS 2 Felipe André Lima Costa 1 Flávio Luis de Mello 2 Oscar Ricardo Vergara 1 1 Instituto Militar de
Uma modelagem para o algoritmo baseado em áreas aplicado aos pares estereoscópicos do sensor CCD-CBERS 2 Felipe André Lima Costa 1 Flávio Luis de Mello 2 Oscar Ricardo Vergara 1 1 Instituto Militar de
PMR2560 Visão Computacional Detecção de bordas. Prof. Eduardo L. L. Cabral
 PMR56 Visão Computacional Detecção de bordas Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Características; Detecção de bordas. Características Tipos de características: Bordas; Cantos;
PMR56 Visão Computacional Detecção de bordas Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Características; Detecção de bordas. Características Tipos de características: Bordas; Cantos;
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
Lista 5. Em toda a lista, as coordenadas referem-se a um sistema de coordenadas fixo (O; i, j, k)
") UFPR - Universidade Federal do Paraná Departamento de Matemática CM045 - Geometria Analítica Prof. José Carlos Eidam Lista 5 Em toda a lista, as coordenadas referem-se a um sistema de coordenadas fixo
UFPR - Universidade Federal do Paraná Departamento de Matemática CM045 - Geometria Analítica Prof. José Carlos Eidam Lista 5 Em toda a lista, as coordenadas referem-se a um sistema de coordenadas fixo
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
MATEMÁTICA MÓDULO 13 FUNDAMENTOS. Professor Matheus Secco
 MATEMÁTICA Professor Matheus Secco MÓDULO 13 FUNDAMENTOS 1. FUNDAMENTOS Conceitos primitivos: ponto, reta e plano. Dois pontos distintos determinam uma única reta que pasa por eles.reta. Três pontos não
MATEMÁTICA Professor Matheus Secco MÓDULO 13 FUNDAMENTOS 1. FUNDAMENTOS Conceitos primitivos: ponto, reta e plano. Dois pontos distintos determinam uma única reta que pasa por eles.reta. Três pontos não
Topografia D. Material de apoio da aula do dia 31/08/18
 Topografia D Material de apoio da aula do dia 31/08/18 Érica Santos Matos Departamento de Geomática Setor de Ciências da Terra Universidade Federal do Paraná -UFPR Aula teórica anterior: Determinação de
Topografia D Material de apoio da aula do dia 31/08/18 Érica Santos Matos Departamento de Geomática Setor de Ciências da Terra Universidade Federal do Paraná -UFPR Aula teórica anterior: Determinação de
Computação Gráfica Viewing
 Computação Gráfica Viewing Aluno:M arcio KassoufC rocom o Prof:R osane M inghim O que é Viewing? Processo responsável por determinar o que será exibido no dispositivo de saída, e como Fonte: Software disponível
Computação Gráfica Viewing Aluno:M arcio KassoufC rocom o Prof:R osane M inghim O que é Viewing? Processo responsável por determinar o que será exibido no dispositivo de saída, e como Fonte: Software disponível
Cartometria CARTOGRAFIA
 Cartometria CARTOGRAFIA CARTOMETRIA É... o ramo da Cartografia que trata das medições efetuadas sobre mapas e o subsequente cálculo dos valores numéricos das variáveis de interesse. Variáveis mensuráveis
Cartometria CARTOGRAFIA CARTOMETRIA É... o ramo da Cartografia que trata das medições efetuadas sobre mapas e o subsequente cálculo dos valores numéricos das variáveis de interesse. Variáveis mensuráveis
Fotogrametria. João Matos Departamento de Engenharia Civil e Arquitectura
 Fotogrametria João Matos Departamento de Engenharia Civil e Arquitectura (Versão 1.0) 11 de Abril de 2007 Motivação Fotogrametria como processo de produção de cartografia com um mínimo de deslocação ao
Fotogrametria João Matos Departamento de Engenharia Civil e Arquitectura (Versão 1.0) 11 de Abril de 2007 Motivação Fotogrametria como processo de produção de cartografia com um mínimo de deslocação ao
Programa Analítico de Disciplina EAM470 Fotogrametria I
 0 Programa Analítico de Disciplina Departamento de Engenharia Civil - Centro de Ciências Exatas e Tecnológicas Número de créditos: 4 Teóricas Práticas Total Duração em semanas: 15 Carga horária semanal
0 Programa Analítico de Disciplina Departamento de Engenharia Civil - Centro de Ciências Exatas e Tecnológicas Número de créditos: 4 Teóricas Práticas Total Duração em semanas: 15 Carga horária semanal
aula6 Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
FOTOGRAMETRIA. Universidade do Minho/ Escola de Engenharia/ Departamento de Engenharia Civil/Topografia/Elisabete Freitas 1
 FOTOGRAMETRIA Universidade do Minho/ Escola de Engenharia/ Departamento de Engenharia Civil/Topografia/Elisabete Freitas 1 Fotogrametria É a arte, ciência e tecnologia usadas para coligir informação fiável,
FOTOGRAMETRIA Universidade do Minho/ Escola de Engenharia/ Departamento de Engenharia Civil/Topografia/Elisabete Freitas 1 Fotogrametria É a arte, ciência e tecnologia usadas para coligir informação fiável,
1 Geometria Descritiva 1 Aula 03/04 Fundamentos da GD - Prof. Luciano PLANOS E VERDADEIRAS GRANDEZAS
 1 Geometria Descritiva 1 Aula 03/04 Fundamentos da GD - Prof. Luciano PLANOS E VERDADEIRAS GRANDEZAS O principal objetivo da visualização dos planos auxiliares é determinar as verdadeiras grandezas das
1 Geometria Descritiva 1 Aula 03/04 Fundamentos da GD - Prof. Luciano PLANOS E VERDADEIRAS GRANDEZAS O principal objetivo da visualização dos planos auxiliares é determinar as verdadeiras grandezas das
Topografia Aplicada à Engenharia Civil. Aula 09 Altimetria e Fotogrametria. Laboratório de Cartografia Digital - CTUFES
 Topografia Geomática Aplicada à Engenharia Civil Aula 09 Altimetria e Fotogrametria Laboratório de Cartografia Digital - CTUFES 2 Altimetria Operação no terreno, que nos fornece os dados necessários à
Topografia Geomática Aplicada à Engenharia Civil Aula 09 Altimetria e Fotogrametria Laboratório de Cartografia Digital - CTUFES 2 Altimetria Operação no terreno, que nos fornece os dados necessários à
Álgebra Linear I - Aula 22
 Álgebra Linear I - Aula 1. Bases Ortonormais.. Matrizes Ortogonais. 3. Exemplos. 1 Bases Ortonormais Lembre que uma base β é ortogonal se está formada por vetores ortogonais entre si: para todo par de
Álgebra Linear I - Aula 1. Bases Ortonormais.. Matrizes Ortogonais. 3. Exemplos. 1 Bases Ortonormais Lembre que uma base β é ortogonal se está formada por vetores ortogonais entre si: para todo par de
DISTRIBUIÇÃO DOS DOMÍNIOS POR PERÍODO
 DEPARTAMENTO DE MATEMÁTICA E CIÊNCIAS EXPERIMENTAIS Planificação Anual da Disciplina de Matemática 11.º ano Ano Letivo de 2016/2017 Manual adotado: Máximo 11 Matemática A 11.º ano Maria Augusta Ferreira
DEPARTAMENTO DE MATEMÁTICA E CIÊNCIAS EXPERIMENTAIS Planificação Anual da Disciplina de Matemática 11.º ano Ano Letivo de 2016/2017 Manual adotado: Máximo 11 Matemática A 11.º ano Maria Augusta Ferreira
Biologia Estrutural. Espaço Recíproco e a Esfera de Ewald. Prof. Dr. Walter Filgueira de Azevedo Jr. wfdaj.sites.uol.com.br
 Biologia Estrutural Espaço Recíproco e a Esfera de Ewald Prof. Dr. Walter Filgueira de Azevedo Jr. Resumo Índices de Miller Índices de Direções Espaço Recíproco Esfera de Ewald Esfera Limite Número de
Biologia Estrutural Espaço Recíproco e a Esfera de Ewald Prof. Dr. Walter Filgueira de Azevedo Jr. Resumo Índices de Miller Índices de Direções Espaço Recíproco Esfera de Ewald Esfera Limite Número de
GDC I AULA TEÓRICA 3
 GDC I AULA TEÓRICA 3 O Sistema axonométrico: - O caso geral da axonometria ortogonal: o triângulo fundamental e o rebatimento dos planos coordenados. - Subsistemas axonométricos ortogonais: trimetria ou
GDC I AULA TEÓRICA 3 O Sistema axonométrico: - O caso geral da axonometria ortogonal: o triângulo fundamental e o rebatimento dos planos coordenados. - Subsistemas axonométricos ortogonais: trimetria ou
Aula 5 - Produto Vetorial
 Aula 5 - Produto Vetorial Antes de iniciar o conceito de produto vetorial, precisamos recordar como se calculam os determinantes. Mas o que é um Determinante? Determinante é uma função matricial que associa
Aula 5 - Produto Vetorial Antes de iniciar o conceito de produto vetorial, precisamos recordar como se calculam os determinantes. Mas o que é um Determinante? Determinante é uma função matricial que associa
Descrições Espaciais e Transformações
 4 o Engenharia de Controle e utomação FCI / 29 rof. Maurílio J. Inácio Descrição de posição e orientação O estudo de robótica envolve constantemente a localização de objetos (as partes e ferramentas) em
4 o Engenharia de Controle e utomação FCI / 29 rof. Maurílio J. Inácio Descrição de posição e orientação O estudo de robótica envolve constantemente a localização de objetos (as partes e ferramentas) em
UNESP UNIVERSIDADE ESTADUAL PAULISTA CAMPUS DE PRESIDENTE PRUDENTE FACULDADE DE CIÊNCIAS E TECNOLOGIA FOTOGRAMETRIA II RESTITUIÇÃO ANALÍTICA
 UNESP UNIVERSIDADE ESTADUAL PAULISTA CAMPUS DE PRESIDENTE PRUDENTE FACULDADE DE CIÊNCIAS E TECNOLOGIA FOTOGRAMETRIA II RESTITUIÇÃO ANALÍTICA Alunos: Ana Claudia de Lima Toledo Aziz Alfredo da Costa Pereira
UNESP UNIVERSIDADE ESTADUAL PAULISTA CAMPUS DE PRESIDENTE PRUDENTE FACULDADE DE CIÊNCIAS E TECNOLOGIA FOTOGRAMETRIA II RESTITUIÇÃO ANALÍTICA Alunos: Ana Claudia de Lima Toledo Aziz Alfredo da Costa Pereira
O EFEITO DA COMPRESSÃO DE IMAGENS NOS PROCESSOS AUTOMÁTICOS DE EXTRAÇÃO DE INFORMAÇÕES
 Anais do III Colóquio Brasileiro de Ciências Geodésicas 0 O EFEITO DA COMPRESSÃO DE IMAGENS NOS PROCESSOS AUTOMÁTICOS DE EXTRAÇÃO DE INFORMAÇÕES Jorge Antonio Silva Centeno 1 Alvaro Muriel Machado 2 Patricia
Anais do III Colóquio Brasileiro de Ciências Geodésicas 0 O EFEITO DA COMPRESSÃO DE IMAGENS NOS PROCESSOS AUTOMÁTICOS DE EXTRAÇÃO DE INFORMAÇÕES Jorge Antonio Silva Centeno 1 Alvaro Muriel Machado 2 Patricia
Setor de Tecnologia - TC Engenharia Ambiental 2/2011. Prova 1. Matemática Aplicada I
 Universidade Federal do Paraná Matemática Aplicada I Setor de Tecnologia - TC Engenharia Ambiental /11 Curitiba,.1.11 Prova 1 Matemática Aplicada I Tobias Bleninger Departamento de Engenharia Ambiental
Universidade Federal do Paraná Matemática Aplicada I Setor de Tecnologia - TC Engenharia Ambiental /11 Curitiba,.1.11 Prova 1 Matemática Aplicada I Tobias Bleninger Departamento de Engenharia Ambiental
Engenharia de Faixa de Dutos Terrestres
 7 Estereoscopia Justaposição dos termos gregos stereo, relativo a dois (duplo), e scopos, relativo a visão (observador), estereoscopia diz respeito a visualização de um mesmo foco por dois mecanismos de
7 Estereoscopia Justaposição dos termos gregos stereo, relativo a dois (duplo), e scopos, relativo a visão (observador), estereoscopia diz respeito a visualização de um mesmo foco por dois mecanismos de
Tranformada de Fourier. Guillermo Cámara-Chávez
 Tranformada de Fourier Guillermo Cámara-Chávez O que é uma série de Fourier Todos conhecemos as funções trigonométricas: seno, cosseno, tangente, etc. O que é uma série de Fourier Essa função é periódica,
Tranformada de Fourier Guillermo Cámara-Chávez O que é uma série de Fourier Todos conhecemos as funções trigonométricas: seno, cosseno, tangente, etc. O que é uma série de Fourier Essa função é periódica,
Figura 9.1: Corpo que pode ser simplificado pelo estado plano de tensões (a), estado de tensões no interior do corpo (b).
, estado de tensões no interior do corpo (b).") 9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
UNIVERSIDADE FEDERAL DE GOIÁS INSTITUTO DE MATEMÁTICA E ESTATÍSTICA Terceira Etapa do Processo Seletivo Estendido 2010 Plano de Ensino
 UNIVERSIDADE FEDERAL DE GOIÁS INSTITUTO DE MATEMÁTICA E ESTATÍSTICA Terceira Etapa do Processo Seletivo Estendido 2010 Plano de Ensino Disciplina: Introdução ao Cálculo Ementa Conjuntos numéricos: números
UNIVERSIDADE FEDERAL DE GOIÁS INSTITUTO DE MATEMÁTICA E ESTATÍSTICA Terceira Etapa do Processo Seletivo Estendido 2010 Plano de Ensino Disciplina: Introdução ao Cálculo Ementa Conjuntos numéricos: números
Uma breve história da Geometria Diferencial (até meados do s
 Uma breve história da Geometria Diferencial (até meados do século XIX) 29 de novembro de 2006 Os postulados de Euclides ( 300 a.c.) Os postulados de Euclides ( 300 a.c.) 1- Dois pontos distintos determinam
Uma breve história da Geometria Diferencial (até meados do século XIX) 29 de novembro de 2006 Os postulados de Euclides ( 300 a.c.) Os postulados de Euclides ( 300 a.c.) 1- Dois pontos distintos determinam
Computação Gráfica - 10
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 10 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 10 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Processamento de Imagem. Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres
 Professora Sheila Cáceres") Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.