Seminário de Robótica Bruno de Abreu Silva
|
|
|
- João Ribas Batista
- 6 Há anos
- Visualizações:
Transcrição


1 Seminário de Robótica Bruno de Abreu Silva 1
2 Introdução Conceitos gerais Métodos de planejamento de rotas 2
3 Dadas as configurações inicial e final de um robô, descobrir uma sequência de movimentos a ser executada pelo robô para que ele saia da primeira e chegue à segunda sem colidir com obstáculos. 3
4 O planejamento de rotas geralmente ocorre em C e não em W A solução é dada por uma função contínua π tal que π:[0,1] C_livre, em que π(0) = q_inicio e π(1) = q_fim Dificuldade do planejamento de rotas determinístico: tempo de execução que cresce exponencialmente com o número de graus de liberdade do robô. Assim, têm sido pesquisados métodos que aproximam C_livre por meio de amostras do mesmo e que são computacionalmente eficientes. 4
5 O grande desafio é projetar planejadores que tenham: Bom desempenho computacional Produzam rotas com boa qualidade Que não sejam dependentes do espaço de trabalho Métodos para planejamento de rotas foram amplamente investigados na teoria e na prática e suas aplicações extrapolam a robótica 5
6 Animação de atores artificiais Biologia molecular Problemas de montagens complexas Planejamento de movimento para objetos flexíveis e planejamento para robôs humanóides Planejamento multirrobos Planejamento em ambientes com obstáculos que se movem 6
7 Introdução Conceitos gerais Espaço de configurações Representação dos objetos em W Representação por polígonos convexos Modelos semi-algébricos Grades de ocupação Métodos de planejamento de rotas 7
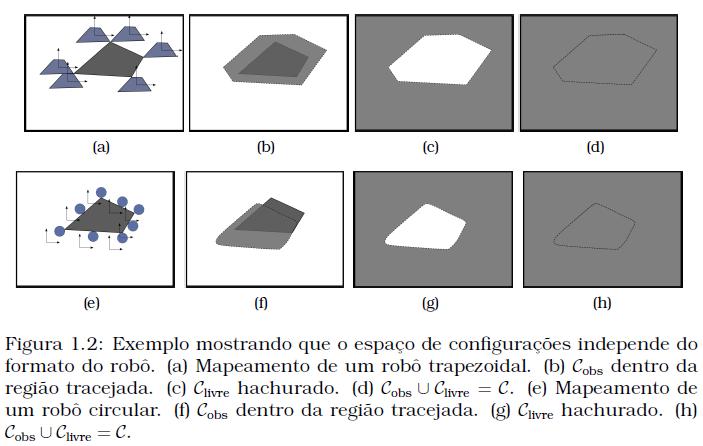
8 Permite resolver com o mesmo algoritmo diferentes problemas de planejamento Permite representar conceitos físicos como força e atrito O planejamento de rotas acontece em C_livre 8
9 9

10 Uma região plana é chamada de região convexa se e somente se todo o segmento de reta cujas extremidades pertencem à região só tem pontos na mesma região 10
11 11
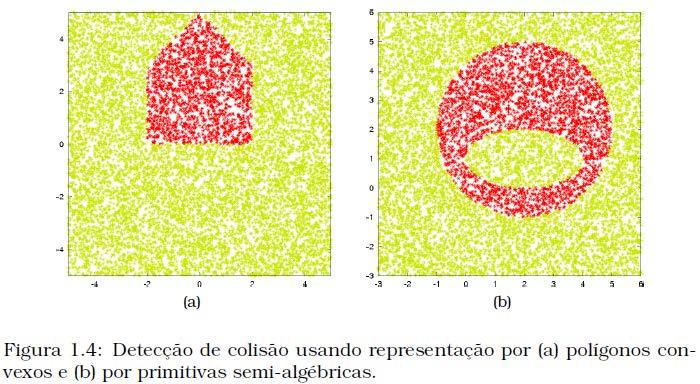
12 Um conjunto de pontos determinado por uma única primitiva polinomial é dito algébrico. Uniões e intersecções de conjuntos algébricos formam um conjunto semi-algébrico. Modelos semi-algébricos são uma generalização da representação por polígonos convexos 12
13 13
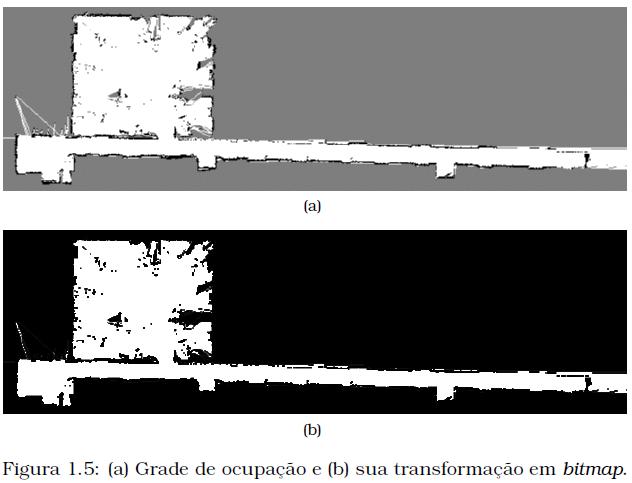
14 O espaço é dividido em células que contém uma probabilidade de ocupação associada. Consegue representar as incertezas relacionadas ao mapeamento do espaço de trabalho Bitmap útil para fins de mapeamento de rotas e pode ser obtido atribuindo 0 ou 1 para cada probabilidade das células de acordo com um limiar 14
15 15
16 Introdução Conceitos gerais Métodos de planejamento de rotas Campos potenciais Planejamento por frente de onda Decomposição celular Métodos probabilísticos Suavização de rotas 16
17 Podem ser divididos em: Algoritmos que utilizam mapa de rotas Algoritmos que fazem decomposição em células Algoritmos que utilizam funções potenciais 17
18 Podem ser divididos também em: De questionamento único De múltiplos questionamentos Por fim, também dividem-se em: Determinísticos Probabilísticos 18
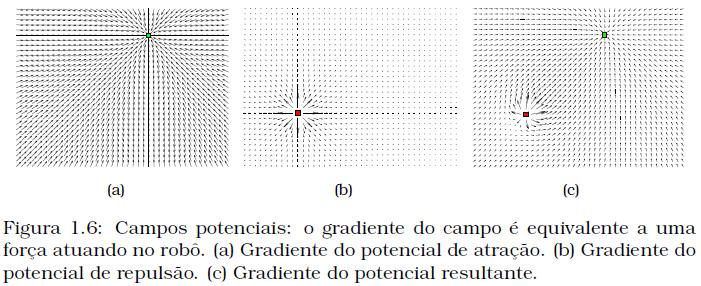
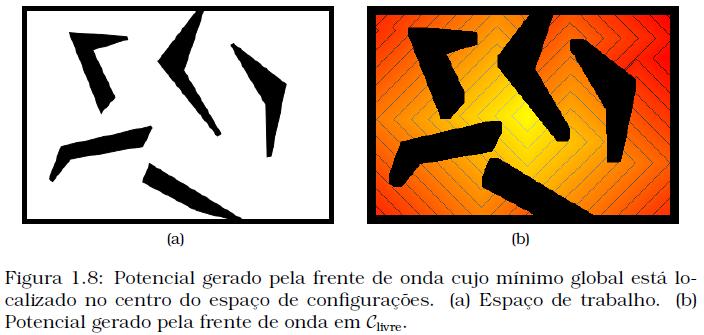
19 A idéia básica é atribuir um potencial de atração gerado pela configuração de destino e um potencial de repulsão gerado pelos obstáculos. Assim, naturalmente o robô tende a ir de encontro à configuração desejada enquanto automaticamente desvia dos obstáculos. 19
20 20
21 21
22 22
23 Abordagens que visam eliminar o problema de mínimos locais: Passeios aleatórios Outras funções potenciais que resultam em um único mínimo localizado na configuração final Campos eletrostáticos Funções harmônicas. 23
24 Técnica simples e determinística Utiliza grade no espaço de configurações Algoritmo: Rotulam-se as células ocupadas pelos obstáculos com 1 e o espaço livre em 0. A configuração final é rotulada com 2 e a partir dela as células vizinhas livres são numeradas com o valor de seu rótulo mais 1, ou seja, 3. O processo é repetido com todas as células vizinhas e assim por diante. Solução: partindo da configuração inicial e seguindo sequencia decrescente até a célula com rótulo 2 24
25 25
26 26
27 É de resolução completa; Existe só um ponto de mínimo, localizado no ponto de destino; A solução é ótima no sentido de ter a menor distancia de Manhattan; É de fácil implementação, sem estruturas de dados complexas. 27
28 por ser determinístico, o PFO pode se tornar computacionalmente impraticável para espaços de configuração de ordem mais alta; rotas geradas são muito próximas dos obstáculos, que pode comprometer a segurança do robô; o critério da distancia de Manhattan não gera rotas ótimas segundo o critério da distancia Euclidiana. 28
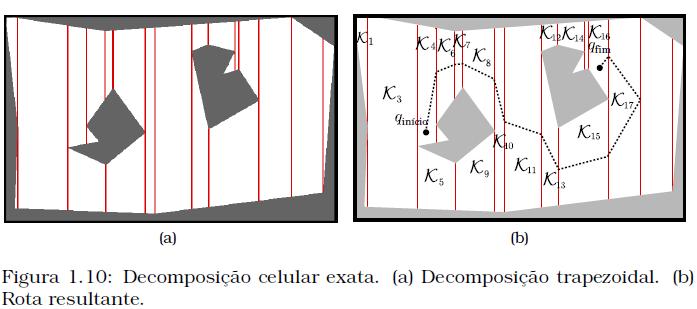
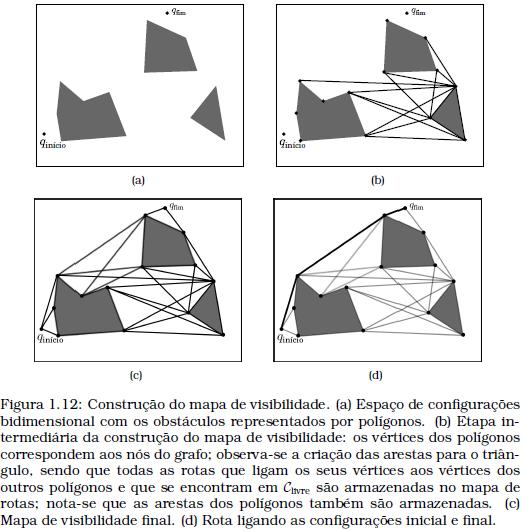
29 Dividem-se em duas categorias principais: decomposição exata e decomposição aproximada. Em ambas as categorias, o princípio básico do planejador é particionar C_livre em um conjunto de células Ki cujas regiões interiores não se sobrepõem. O objetivo é achar uma sequência de células adjacentes K1... Kn E C_livre, tal que K1 = Kinicio, Kn = Kfim. 29
30 O espaço de configurações livre é particionado tal que a união das células resulta exatamente nele mesmo. O planejador resultante é considerado completo. Uma vez que C_livre foi particionado, a solução para o planejamento de rotas consiste em achar uma sequência de células adjacentes ligando qinicio a qfim. 30
31 31
32 Não permitem a representação exata de C_livre É mais fácil de se implementar que as versões exatas São de resolução completa O espaço de configurações é dividido sucessivamente em células denominadas vazias, cheias ou mistas. O objetivo é refinar a amostragem de células mistas até que elas sejam divididas apenas em células vazias ou cheias, ou então até uma resolução máxima. 32
33 33
34 34
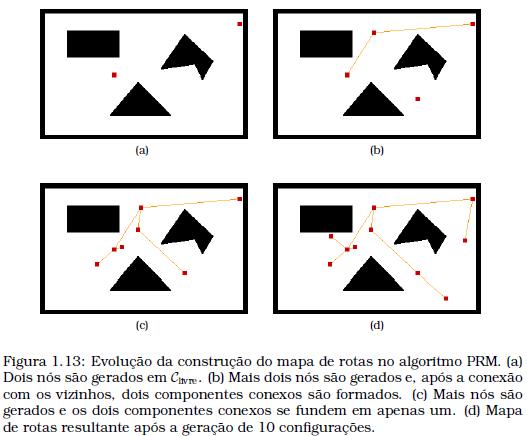
35 A estrutura básica deste algoritmo é um grafo localizado em C_livre O algoritmo PRM é dividido em duas etapas: aprendizado e questionamento. A primeira consiste em expandir o grafo na região C_livre para poder gerar rotas rapidamente na etapa seguinte. Uma das premissas utilizadas no PRM padrão é que o espaço de trabalho seja estático ou que as mudanças ocorrem lentamente. 35
36 36
37 37
38 38
39 Número de amostras não pode ser nem muito pequeno inviabilizando o encontro da solução e nem muito grande desperdiçando recursos computacionais O PRM pode ser utilizado em espaços de configuração de dimensões grandes, pois uma vez que o mapa de rotas é construído, basta verificar o grafo. 39
40 Foi desenvolvido inicialmente para planejamento kinodinâmico. Versão bidirecional específica do RRT para buscas no espaço de configurações: RRTconecta. O objetivo é fazer com que duas árvores cresçam da configuração inicial e final do robô por meio de um processo de amostragem em C e expansão destas árvores em C_livre. 40
41 41
42 42
43 43
44 Como a busca é feita de forma bidirecional, a solução em geral é encontrada bem antes do espaço de busca ter sido todo explorado. Assim como o PRM, um problema do RRT é que a busca por vizinhos mais próximos é feita ao adicionar um novo nó na árvore de exploração. 44
45 É de questionamento único Assim como o RRT, visa explorar de maneira uniforme o espaço de configurações. Duas árvores são geradas a partir das configurações iniciais qinicio e qfim e o objetivo é que uma árvore seja alcançável pela outra, o que caracteriza a solução do problema. 45
46 46
47 47
48 48
49 Se a distância D for muito grande, áreas que não são relevantes para a solução podem ser amostradas. Por outro lado, se for muito pequeno, o algoritmo pode demorar para convergir. Outra dificuldade inerente a este algoritmo é à escolha da função PI(q). Ela deve balancear a exploração de áreas pouco densas e muito densas 49
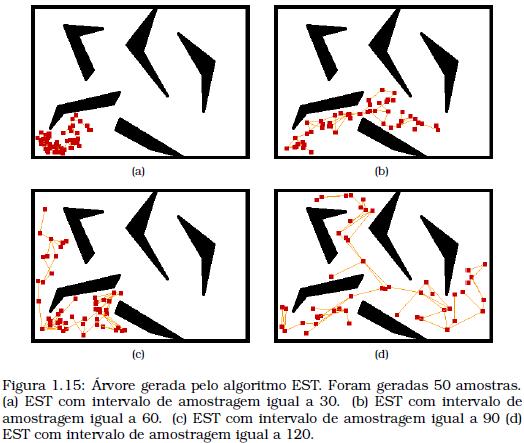
50 É de questionamento único. Ênfase no tempo de execução. Utiliza um passeio aleatório para explorar o espaço de configurações livres até que a última amostra gerada possa ser conectada ao ponto de destino por meio de um planejador local. 50
51 51
52 52
53 Sua implementação é a mais simples dentre os quatro algoritmos. Por não fazer busca de configurações vizinhas mais próximas, o custo de gerar uma nova amostra também é muito baixo. Se adapta à estrutura do espaço de configurações para gerar uma nova amostra. A amostragem é polarizada em C_livre. 53
54 Já a maior desvantagem do ARW é que a rota resultante possui uma péssima qualidade, com muitas sinuosidades e ciclos desnecessários. 54
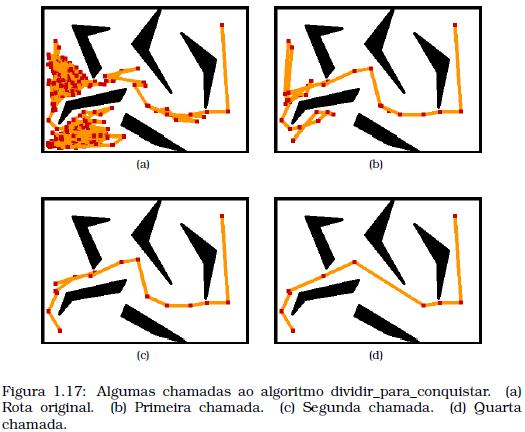
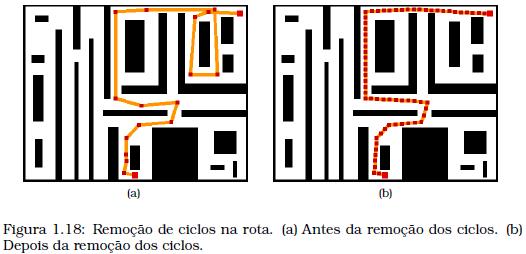
55 Dividir para conquistar Utilização de atalhos e remoção de ciclos 55
56 56
57 57
58 58
59 59
RESOLUÇÃO DE PROBLEMAS POR MEIO DE BUSCA (PARTE 1) *Capítulo 3 (Russel & Norvig)
 *Capítulo 3 (Russel & Norvig)") RESOLUÇÃO DE PROBLEMAS POR MEIO DE BUSCA (PARTE 1) *Capítulo 3 (Russel & Norvig) 1 Tópicos 1. Agentes para resolução de problemas 2. Formulação de problemas 3. Exemplos de problemas 4. Soluções aos problemas
RESOLUÇÃO DE PROBLEMAS POR MEIO DE BUSCA (PARTE 1) *Capítulo 3 (Russel & Norvig) 1 Tópicos 1. Agentes para resolução de problemas 2. Formulação de problemas 3. Exemplos de problemas 4. Soluções aos problemas
Inteligência Artificial - IA. Resolução de problemas por meio de busca
 Resolução de problemas por meio de busca 1 Agente reativo - definido por ação reação Agente de resolução de problemas (ou baseado em objetivos) encontra sequencias de ações que leva ao estado desejável.
Resolução de problemas por meio de busca 1 Agente reativo - definido por ação reação Agente de resolução de problemas (ou baseado em objetivos) encontra sequencias de ações que leva ao estado desejável.
NOTAS DE AULA 1 METAHEURÍSTICA 13/10/2016
 NOTAS DE AULA 1 METAHEURÍSTICA 13/10/2016 Metaheurística: São técnicas de soluções que gerenciam uma interação entre técnicas de busca local e as estratégias de nível superior para criar um processo de
NOTAS DE AULA 1 METAHEURÍSTICA 13/10/2016 Metaheurística: São técnicas de soluções que gerenciam uma interação entre técnicas de busca local e as estratégias de nível superior para criar um processo de
Clustering (k-means, SOM e hierárquicos)
") Clustering (k-means, SOM e hierárquicos) André Tavares da Silva andre.silva@udesc.br (Capítulo 10 de Duda e Hart) Clustering Introdução e tipos Roteiro Agrupamentos hierárquicos AGNES, DIANA e Dendogram
Clustering (k-means, SOM e hierárquicos) André Tavares da Silva andre.silva@udesc.br (Capítulo 10 de Duda e Hart) Clustering Introdução e tipos Roteiro Agrupamentos hierárquicos AGNES, DIANA e Dendogram
TGR BCC Representação Computacional de Grafos. Prof. Ricardo José Pfitscher
 TGR BCC Representação Computacional de Grafos Prof. Ricardo José Pfitscher Cronograma Representação Matriz de djacências Lista de djacências Matriz de Incidências Representação Como podemos representar
TGR BCC Representação Computacional de Grafos Prof. Ricardo José Pfitscher Cronograma Representação Matriz de djacências Lista de djacências Matriz de Incidências Representação Como podemos representar
Resolução de Problemas. Universidade Católica de Pelotas Engenharia da Computação Disciplina: Inteligência Artificial
 Resolução de Problemas Universidade Católica de Pelotas Engenharia da Computação Disciplina: Inteligência Artificial 2 Resolução de Problemas Introdução Componentes Solução Busca de soluções 3 Resolução
Resolução de Problemas Universidade Católica de Pelotas Engenharia da Computação Disciplina: Inteligência Artificial 2 Resolução de Problemas Introdução Componentes Solução Busca de soluções 3 Resolução
Resolução de problemas por meio de busca. CAPÍTULO 3 - Russell
 Resolução de problemas por meio de busca CAPÍTULO 3 - Russell Os agentes de resolução de problemas decidem o que fazer encontrando seqüências de ações que levam a estados desejáveis. Inicialmente veremos:
Resolução de problemas por meio de busca CAPÍTULO 3 - Russell Os agentes de resolução de problemas decidem o que fazer encontrando seqüências de ações que levam a estados desejáveis. Inicialmente veremos:
GRAFOS. Prof. André Backes. Como representar um conjunto de objetos e as suas relações?
 8/0/06 GRAFOS Prof. André Backes Definição Como representar um conjunto de objetos e as suas relações? Diversos tipos de aplicações necessitam disso Um grafo é um modelo matemático que representa as relações
8/0/06 GRAFOS Prof. André Backes Definição Como representar um conjunto de objetos e as suas relações? Diversos tipos de aplicações necessitam disso Um grafo é um modelo matemático que representa as relações
Resolução de problemas por meio de busca. Inteligência Artificial
 1 Resolução de problemas por meio de busca (Capítulo 3 - Russell) Inteligência Artificial Professor: Rosalvo Ferreira de Oliveira Neto 2 Estrutura 1. Agente de resolução de problema 2. Tipos de problema
1 Resolução de problemas por meio de busca (Capítulo 3 - Russell) Inteligência Artificial Professor: Rosalvo Ferreira de Oliveira Neto 2 Estrutura 1. Agente de resolução de problema 2. Tipos de problema
Mapeamento robótico. Mapeamento semântico. Metodologia. Maquinas de vetores de suporte. Maquinas de vetores de suporte. Modelos ocultos de Markov
 Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 19 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Campos Potenciais Harmônicos É um metodo proposto por Connolly
Problemas de otimização
 Problemas de otimização Problemas de decisão: Existe uma solução satisfazendo certa propriedade? Resultado: sim ou não Problemas de otimização: Entre todas as soluções satisfazendo determinada propriedade,
Problemas de otimização Problemas de decisão: Existe uma solução satisfazendo certa propriedade? Resultado: sim ou não Problemas de otimização: Entre todas as soluções satisfazendo determinada propriedade,
lnteligência Artificial
 lnteligência Artificial Busca Heurística - Informada Estratégias de Busca Heurística Usam conhecimento específico do problema na busca da solução Mais eficientes que busca não informada Busca Informada
lnteligência Artificial Busca Heurística - Informada Estratégias de Busca Heurística Usam conhecimento específico do problema na busca da solução Mais eficientes que busca não informada Busca Informada
Resolução de Problemas de Busca
 Resolução de Problemas de Busca 1 Ao final desta aula a gente deve Compreender o que é um problema de busca em IA Ser capaz de formulá-lo Conhecer algumas aplicações Entender como buscar a solução do problema
Resolução de Problemas de Busca 1 Ao final desta aula a gente deve Compreender o que é um problema de busca em IA Ser capaz de formulá-lo Conhecer algumas aplicações Entender como buscar a solução do problema
Algoritmos Randomizados: Geometria Computacional
 Algoritmos Randomizados: Geometria Computacional Celina Figueiredo Guilherme Fonseca Manoel Lemos Vinicius de Sá 26º Colóquio Brasileiro de Matemática IMPA Rio de Janeiro Brasil 2007 Resumo Introdução
Algoritmos Randomizados: Geometria Computacional Celina Figueiredo Guilherme Fonseca Manoel Lemos Vinicius de Sá 26º Colóquio Brasileiro de Matemática IMPA Rio de Janeiro Brasil 2007 Resumo Introdução
Teoria dos Grafos. Edson Prestes
 Edson Prestes Introdução Representação Mostre que todo passeio de u até v contém um caminho de u até v. Considere um passeio de comprimento l de u até v. Se l = 0 então temos um passeio sem nenhuma aresta.
Edson Prestes Introdução Representação Mostre que todo passeio de u até v contém um caminho de u até v. Considere um passeio de comprimento l de u até v. Se l = 0 então temos um passeio sem nenhuma aresta.
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 20 Waypoints e Pathfinding Edirlei Soares de Lima Introdução Locomover-se no espaço do jogo é uma ação fundamental dos NPCs em qualquer gênero
INF 1771 Inteligência Artificial Aula 20 Waypoints e Pathfinding Edirlei Soares de Lima Introdução Locomover-se no espaço do jogo é uma ação fundamental dos NPCs em qualquer gênero
6. PLANEJAMENTO DE TAREFAS
 6. PLNEJMENTO DE TREFS Neste capítulo abordamos o problema de planejamento de tarefas de robôs manipuladores. Planejamento de Tarefas está mais relacionado aos objetivos gerais de uma tarefa de manipulação
6. PLNEJMENTO DE TREFS Neste capítulo abordamos o problema de planejamento de tarefas de robôs manipuladores. Planejamento de Tarefas está mais relacionado aos objetivos gerais de uma tarefa de manipulação
Teoria dos Grafos Aula 5
 Teoria dos Grafos Aula Aula passada Explorando grafos Mecanismos genéricos Ideias sobre BFS, DFS Aula de hoje Busca em grafos Busca em largura (BFS Breadth First Search) Propriedades Busca em Grafos Problema
Teoria dos Grafos Aula Aula passada Explorando grafos Mecanismos genéricos Ideias sobre BFS, DFS Aula de hoje Busca em grafos Busca em largura (BFS Breadth First Search) Propriedades Busca em Grafos Problema
UM MÉTODO DE PLANEJAMENTO DE TRAJETÓRIA PARA ROBÔS MÓVEIS ATRAVÉS DE PASSEIOS ALEATÓRIOS ADAPTATIVOS E MAPA DE ROTAS
 UM MÉTODO DE PLANEJAMENTO DE TRAJETÓRIA PARA ROBÔS MÓVEIS ATRAVÉS DE PASSEIOS ALEATÓRIOS ADAPTATIVOS E MAPA DE ROTAS Bruno Vilhena Adôrno, Geovany Araújo Borges Laboratório de Controle e Visão por Computador
UM MÉTODO DE PLANEJAMENTO DE TRAJETÓRIA PARA ROBÔS MÓVEIS ATRAVÉS DE PASSEIOS ALEATÓRIOS ADAPTATIVOS E MAPA DE ROTAS Bruno Vilhena Adôrno, Geovany Araújo Borges Laboratório de Controle e Visão por Computador
Inteligência Computacional
 Rafael D. Ribeiro, M.Sc. rafaeldiasribeiro@gmail.com http://www.rafaeldiasribeiro.com.br Agente: É um elemento qualquer capaz de perceber seu ambiente por meio de sensorese de agir sobre este ambiente
Rafael D. Ribeiro, M.Sc. rafaeldiasribeiro@gmail.com http://www.rafaeldiasribeiro.com.br Agente: É um elemento qualquer capaz de perceber seu ambiente por meio de sensorese de agir sobre este ambiente
Resolução de Problemas
 Resolução de Problemas 1 Agente de Resolução de Problemas (1/2) 2 O agente reativo Escolhe suas ações com base apenas nas percepções atuais não pode pensar no futuro, não sabe aonde vai 4 5 8 1 6 7 2 3?
Resolução de Problemas 1 Agente de Resolução de Problemas (1/2) 2 O agente reativo Escolhe suas ações com base apenas nas percepções atuais não pode pensar no futuro, não sabe aonde vai 4 5 8 1 6 7 2 3?
Computação Gráfica - 11
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 11 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 11 Prof. Jorge Cavalcanti jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav
Algoritmo Aproximação. Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3
![Algoritmo Aproximação. Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3](/thumbs/100/147953246.jpg "Algoritmo Aproximação. Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3") Algoritmo Aproximação Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3 Heurísticas para Problemas NP- Completo Heurística: algoritmo que pode produzir um bom resultado (ou até a solução ótima),
Algoritmo Aproximação Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3 Heurísticas para Problemas NP- Completo Heurística: algoritmo que pode produzir um bom resultado (ou até a solução ótima),
Buscas Informadas ou Heurísticas - Parte II
 Buscas Informadas ou Heurísticas - Parte II Prof. Cedric Luiz de Carvalho Instituto de Informática - UFG Graduação em Ciência da Computação / 2006 FUNÇÕES HEURÍSTICAS - 1/7 FUNÇÕES HEURÍSTICAS - 2/7 Solução
Buscas Informadas ou Heurísticas - Parte II Prof. Cedric Luiz de Carvalho Instituto de Informática - UFG Graduação em Ciência da Computação / 2006 FUNÇÕES HEURÍSTICAS - 1/7 FUNÇÕES HEURÍSTICAS - 2/7 Solução
Busca com informação e exploração. Capítulo 4 Russell & Norvig Seção 4.2 e 4.3
 Busca com informação e exploração Capítulo 4 Russell & Norvig Seção 4.2 e 4.3 1 Revisão da aula passada: Busca A * Idéia: evitar expandir caminhos que já são caros Função de avaliação f(n) = g(n) + h(n)
Busca com informação e exploração Capítulo 4 Russell & Norvig Seção 4.2 e 4.3 1 Revisão da aula passada: Busca A * Idéia: evitar expandir caminhos que já são caros Função de avaliação f(n) = g(n) + h(n)
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
CTC-17 Inteligência Artificial Problemas de Busca. Prof. Paulo André Castro
 CTC-17 Inteligência Artificial Problemas de Busca Prof. Paulo André Castro pauloac@ita.br www.comp.ita.br/~pauloac Sala 110, IEC-ITA Sumário Agentes que buscam soluções para problemas: Exemplo Tipos de
CTC-17 Inteligência Artificial Problemas de Busca Prof. Paulo André Castro pauloac@ita.br www.comp.ita.br/~pauloac Sala 110, IEC-ITA Sumário Agentes que buscam soluções para problemas: Exemplo Tipos de
Arranjos. Claudio Esperança Paulo Roma LCG/UFRJ. All rights reserved.
 Arranjos Claudio Esperança Paulo Roma 1 Arranjos Arranjos de retas e planos são a terceira estrutura em importância em GC. Arranjos de retas são coleções de retas infinitas distribuídas no plano. Arranjos
Arranjos Claudio Esperança Paulo Roma 1 Arranjos Arranjos de retas e planos são a terceira estrutura em importância em GC. Arranjos de retas são coleções de retas infinitas distribuídas no plano. Arranjos
Busca com informação e exploração. Inteligência Artificial
 Busca com informação e exploração (Capítulo 4 - Russell) Inteligência Artificial Professor: Rosalvo Ferreira de Oliveira Neto Estrutura Busca pela melhor escolha Busca gulosa pela melhor escolha Busca
Busca com informação e exploração (Capítulo 4 - Russell) Inteligência Artificial Professor: Rosalvo Ferreira de Oliveira Neto Estrutura Busca pela melhor escolha Busca gulosa pela melhor escolha Busca
x y Grafo Euleriano Figura 1
 Grafo Euleriano Um caminho simples ou um circuito simples é dito euleriano se ele contém todas as arestas de um grafo. Um grafo que contém um circuito euleriano é um grafo euleriano. Um grafo que não contém
Grafo Euleriano Um caminho simples ou um circuito simples é dito euleriano se ele contém todas as arestas de um grafo. Um grafo que contém um circuito euleriano é um grafo euleriano. Um grafo que não contém
Inteligência Artificial. Resolução de problemas por meio de algoritmos de busca. Aula II Algoritmos básicos de busca cega
 Universidade Estadual do Oeste do Paraná Curso de Bacharelado em Ciência da Computação Inteligência Artificial Resolução de problemas por meio de algoritmos de busca Aula II Algoritmos básicos de busca
Universidade Estadual do Oeste do Paraná Curso de Bacharelado em Ciência da Computação Inteligência Artificial Resolução de problemas por meio de algoritmos de busca Aula II Algoritmos básicos de busca
Inteligência Artificial
 Contextualizando Inteligência Artificial Buscas Onde podemos usar a IA Problemas que não possuem soluções algortimicas Problemas que possuem soluções algoritimicas, mas são impraticáveis (Complexidade,
Contextualizando Inteligência Artificial Buscas Onde podemos usar a IA Problemas que não possuem soluções algortimicas Problemas que possuem soluções algoritimicas, mas são impraticáveis (Complexidade,
Noções da Teoria dos Grafos. André Arbex Hallack
 Noções da Teoria dos Grafos André Arbex Hallack Junho/2015 Índice 1 Introdução e definições básicas. Passeios eulerianos 1 1.1 Introdução histórica..................................... 1 1.2 Passeios
Noções da Teoria dos Grafos André Arbex Hallack Junho/2015 Índice 1 Introdução e definições básicas. Passeios eulerianos 1 1.1 Introdução histórica..................................... 1 1.2 Passeios
meio de busca Seções 3.1, 3.2 e 3.3
 Resolução de problemas por meio de busca Capítulo 3 Russell & Norvig Seções 3.1, 3.2 e 3.3 Agentes de resolução de problemas Agentes reativos não funcionam em ambientes para quais o número de regras condição
Resolução de problemas por meio de busca Capítulo 3 Russell & Norvig Seções 3.1, 3.2 e 3.3 Agentes de resolução de problemas Agentes reativos não funcionam em ambientes para quais o número de regras condição
2 Conceitos básicos de topologia
 2 Conceitos básicos de topologia Neste Capítulo são introduzidos alguns conceitos básicos de topologia combinatória e da Teoria das Alças que formam a base teórica do presente trabalho. 2.1 Topologia combinatória
2 Conceitos básicos de topologia Neste Capítulo são introduzidos alguns conceitos básicos de topologia combinatória e da Teoria das Alças que formam a base teórica do presente trabalho. 2.1 Topologia combinatória
Noções da Teoria dos Grafos
 Noções da Teoria dos Grafos André Arbex Hallack Índice 1 Introdução e definições básicas. Passeios eulerianos 1 2 Ciclos hamiltonianos 7 3 Árvores 11 4 Emparelhamento em grafos 15 5 Grafos planares: Colorindo
Noções da Teoria dos Grafos André Arbex Hallack Índice 1 Introdução e definições básicas. Passeios eulerianos 1 2 Ciclos hamiltonianos 7 3 Árvores 11 4 Emparelhamento em grafos 15 5 Grafos planares: Colorindo
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 01 Resolução de problemas por meio de Busca Edirlei Soares de Lima Introdução Agentes Autônomos: Entidades autônomas capazes de observar o ambiente
INF 1771 Inteligência Artificial Aula 01 Resolução de problemas por meio de Busca Edirlei Soares de Lima Introdução Agentes Autônomos: Entidades autônomas capazes de observar o ambiente
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 20 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Exploração baseada em Fronteiras Método desenvolvido por Brian
Tópicos Especiais: Inteligência Artificial BUSCA COM INFORMAÇÃO E EXPLORAÇÃO
 Tópicos Especiais: Inteligência Artificial BUSCA COM INFORMAÇÃO E EXPLORAÇÃO Material baseado e adaptado do Cap. 4 do Livro Inteligência Artificial de Russell & Norvig Bibliografia Inteligência Artificial
Tópicos Especiais: Inteligência Artificial BUSCA COM INFORMAÇÃO E EXPLORAÇÃO Material baseado e adaptado do Cap. 4 do Livro Inteligência Artificial de Russell & Norvig Bibliografia Inteligência Artificial
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais. Prof. Adilson Gonzaga
 Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Noções da Teoria dos Grafos. André Arbex Hallack
 Noções da Teoria dos Grafos André Arbex Hallack Junho/2015 Índice 1 Introdução e definições básicas. Passeios eulerianos 1 2 Ciclos hamiltonianos 5 3 Árvores 7 4 Emparelhamento em grafos 11 5 Grafos planares:
Noções da Teoria dos Grafos André Arbex Hallack Junho/2015 Índice 1 Introdução e definições básicas. Passeios eulerianos 1 2 Ciclos hamiltonianos 5 3 Árvores 7 4 Emparelhamento em grafos 11 5 Grafos planares:
Campos Potenciais. Campos Potenciais. Campos Potenciais. Campos Potenciais. Campos Potenciais 05/30/2016
 Introdução à Robótica Robótica Móvel Planejamento e Navegação Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Planejamento e navegação Uma das abordagens mais utilizadas Proposta por Oussama Khatib
Introdução à Robótica Robótica Móvel Planejamento e Navegação Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Planejamento e navegação Uma das abordagens mais utilizadas Proposta por Oussama Khatib
Mineração de Dados em Biologia Molecular
 Mineração de Dados em Biologia Molecular André C. P. L. F. de Carvalho Monitor: Valéria Carvalho Agrupamento de Dados Tópicos Agrupamento de dados Análise de cluster Dificuldades em agrupamento Algoritmos
Mineração de Dados em Biologia Molecular André C. P. L. F. de Carvalho Monitor: Valéria Carvalho Agrupamento de Dados Tópicos Agrupamento de dados Análise de cluster Dificuldades em agrupamento Algoritmos
Parte B Teoria dos Grafos
 45 Parte B Teoria dos Grafos B. Grafos e Subgrafos Um grafo G é uma tripla ordenada (V(G), E(G), ), constituindo de um conjunto não vazio V(G) de vértices, um conjunto disjunto E(G) das arestas e uma função
45 Parte B Teoria dos Grafos B. Grafos e Subgrafos Um grafo G é uma tripla ordenada (V(G), E(G), ), constituindo de um conjunto não vazio V(G) de vértices, um conjunto disjunto E(G) das arestas e uma função
Inteligência Artificial. Prof. Tiago A. E. Ferreira Aula 5 Resolvendo Problemas
 Inteligência Artificial Prof. Tiago A. E. Ferreira Aula 5 Resolvendo Problemas 1 Agente solucionador de problemas (guiado por objetivo) O agente reativo Escolhe suas ações com base apenas nas percepções
Inteligência Artificial Prof. Tiago A. E. Ferreira Aula 5 Resolvendo Problemas 1 Agente solucionador de problemas (guiado por objetivo) O agente reativo Escolhe suas ações com base apenas nas percepções
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
INTRODUÇÃO À ROBÓTICA MÓVEL Aula 12 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br É a estrutura interna que armazena as informações associadas
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 7. Iluminação
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 7 Iluminação Histórico Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 7 Iluminação Histórico Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre
Problema do Caminho Hamiltoniano
 Universidade de São Paulo Escola de Artes, Ciências e Humanidades Bacharelado em Sistemas de Informação Introdução à Ciência da Computação II Professores Luciano Digiampietri e Fábio Nakano Data de entrega:
Universidade de São Paulo Escola de Artes, Ciências e Humanidades Bacharelado em Sistemas de Informação Introdução à Ciência da Computação II Professores Luciano Digiampietri e Fábio Nakano Data de entrega:
UNIVERSIDADE DE BRASÍLIA
 PLANEJAMENTO PROBABILÍSTICO DE ROTAS NO ESPAÇO DE CONFIGURAÇÃO E SUA APLICAÇÃO EM ROBÓTICA MÓVEL BRUNO VILHENA ADORNO DISSERTAÇÃO DE MESTRADO EM ENGENHARIA ELÉTRICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA
PLANEJAMENTO PROBABILÍSTICO DE ROTAS NO ESPAÇO DE CONFIGURAÇÃO E SUA APLICAÇÃO EM ROBÓTICA MÓVEL BRUNO VILHENA ADORNO DISSERTAÇÃO DE MESTRADO EM ENGENHARIA ELÉTRICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA
Aprendizado de Máquina
 Aprendizado de Máquina André C. P. L. F. de Carvalho Posdoutorando: Isvani Frias-Blanco ICMC-USP Agrupamento de dados Tópicos Agrupamento de dados Dificuldades em agrupamento Algoritmos de agrupamento
Aprendizado de Máquina André C. P. L. F. de Carvalho Posdoutorando: Isvani Frias-Blanco ICMC-USP Agrupamento de dados Tópicos Agrupamento de dados Dificuldades em agrupamento Algoritmos de agrupamento
Lista 1 Sistemas Inteligentes (INE5633) 2014s2. Cap. 2 - Russel & Norvig - Exercícios selecionados (respostas em azul)
 2014s2. Cap. 2 - Russel & Norvig - Exercícios selecionados (respostas em azul)") Lista 1 () 2014s2 Sistemas de Informação Universidade Federal de Santa Catarina Cap. 2 - Russel & Norvig - Exercícios selecionados (respostas em azul) 1. Tanto a medida de desempenho quanto a função de
Lista 1 () 2014s2 Sistemas de Informação Universidade Federal de Santa Catarina Cap. 2 - Russel & Norvig - Exercícios selecionados (respostas em azul) 1. Tanto a medida de desempenho quanto a função de
Inteligência Artificial
 Inteligência Artificial Aula #2: Resolução de Problemas Via Busca Prof. Eduardo R. Hruschka 1 Agenda Tipos de Problemas Estados únicos (totalmente observável) Informação parcial Formulação do Problema
Inteligência Artificial Aula #2: Resolução de Problemas Via Busca Prof. Eduardo R. Hruschka 1 Agenda Tipos de Problemas Estados únicos (totalmente observável) Informação parcial Formulação do Problema
Teoria dos grafos. Caminho euleriano e Hamiltoniano. Prof. Jesuliana N. Ulysses
 1 7 Teoria dos grafos Caminho euleriano e Hamiltoniano Grafo Euleriano Grafo onde é possível achar um caminho fechado (ciclo), passando em cada aresta uma única vez Quais são os grafos de Euler? Teorema:
1 7 Teoria dos grafos Caminho euleriano e Hamiltoniano Grafo Euleriano Grafo onde é possível achar um caminho fechado (ciclo), passando em cada aresta uma única vez Quais são os grafos de Euler? Teorema:
Percursos em um grafo
 Percursos em um grafo Definição Um percurso ou cadeia é uma seqüência de arestas sucessivamente adjacentes, cada uma tendo uma extremidade adjacente à anterior e a outra a subsequente (à exceção da primeira
Percursos em um grafo Definição Um percurso ou cadeia é uma seqüência de arestas sucessivamente adjacentes, cada uma tendo uma extremidade adjacente à anterior e a outra a subsequente (à exceção da primeira
GRAFOS BUSCAS E MENOR CAMINHO. Prof. André Backes
 8//6 GRAFOS BUSCAS E MENOR CAMINHO Prof. André Backes Busca em grafos Definição Consiste em explorar o grafo de uma maneira bem específica. Trata-se de um processo sistemático de como caminhar por seus
8//6 GRAFOS BUSCAS E MENOR CAMINHO Prof. André Backes Busca em grafos Definição Consiste em explorar o grafo de uma maneira bem específica. Trata-se de um processo sistemático de como caminhar por seus
Algoritmo Aproximado. Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3
![Algoritmo Aproximado. Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3](/thumbs/76/73616499.jpg "Algoritmo Aproximado. Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3") Algoritmo Aproximado Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3 Heurísticas para Problemas N P- Completo Heurística: algoritmo que pode produzir um bom resultado (ou até a solução ótima),
Algoritmo Aproximado Prof. Anderson Almeida Ferreira [DPV]9.2 [ZIV]9.2.2 e 9.2.3 Heurísticas para Problemas N P- Completo Heurística: algoritmo que pode produzir um bom resultado (ou até a solução ótima),
CARACTERÍSTICAS ESTÁTICAS DE SISTEMAS DE MEDIÇÃO
 DETERMINAÇÃO DA DERIVA DO ZERO: ENSAIO: Manter P o = 0 e variar a temperatura T dentro da faixa de temperaturas ambientes [T max, T min ] previstas para uso do SM. Os ensaios feitos em CÂMARA de temperatura
DETERMINAÇÃO DA DERIVA DO ZERO: ENSAIO: Manter P o = 0 e variar a temperatura T dentro da faixa de temperaturas ambientes [T max, T min ] previstas para uso do SM. Os ensaios feitos em CÂMARA de temperatura
Busca com informação e exploração. Inteligência Artificial. Revisão da aula passada: Heurística Admissível. Revisão da aula passada: Busca A *
 Inteligência Artificial Aula 6 Profª Bianca Zadrozny http://www.ic.uff.br/~bianca/ia Busca com informação e exploração Capítulo 4 Russell & Norvig Seção 4.2 e 4.3 Revisão da aula passada: Busca A * Idéia:
Inteligência Artificial Aula 6 Profª Bianca Zadrozny http://www.ic.uff.br/~bianca/ia Busca com informação e exploração Capítulo 4 Russell & Norvig Seção 4.2 e 4.3 Revisão da aula passada: Busca A * Idéia:
Histórico. Estado da Arte. Histórico. Modelagem de Objetos. Modelagem por arames (wireframes). Modelagem por superfícies (década de 60).
. Modelagem por superfícies (década de 60).") Histórico Modelagem de Objetos Renato Ferreira Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre a sua superfície. Gera modelos ambíguos. Modelagem por superfícies (década
Histórico Modelagem de Objetos Renato Ferreira Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre a sua superfície. Gera modelos ambíguos. Modelagem por superfícies (década
6 Aplicação do Modelo de Geração de Cenários
 6 Aplicação do Modelo de Geração de Cenários 6.. Considerações Iniciais Os cenários de energia natural afluente, que são utilizados durante as simulações forward e backward do processo de definição da
6 Aplicação do Modelo de Geração de Cenários 6.. Considerações Iniciais Os cenários de energia natural afluente, que são utilizados durante as simulações forward e backward do processo de definição da
8 Conclusões e Trabalhos Futuros
 8 Conclusões e Trabalhos Futuros Este trabalho propôs investigar o apoio das técnicas de Inteligência Computacional no desenvolvimento da Nanociência e Nanotecnologia. Tal apoio é aqui denominado de Nanotecnologia
8 Conclusões e Trabalhos Futuros Este trabalho propôs investigar o apoio das técnicas de Inteligência Computacional no desenvolvimento da Nanociência e Nanotecnologia. Tal apoio é aqui denominado de Nanotecnologia
Busca com informação e exploração. Inteligência Artificial. Busca pela melhor escolha. Romênia com custos em km. Busca com informação (ou heurística)
") Inteligência Artificial Aula 5 Profª Bianca Zadrozny http://www.ic.uff.br/~bianca/ia Busca com informação e exploração Capítulo 4 Russell & Norvig Seção 4.1 Busca com informação (ou heurística) Utiliza
Inteligência Artificial Aula 5 Profª Bianca Zadrozny http://www.ic.uff.br/~bianca/ia Busca com informação e exploração Capítulo 4 Russell & Norvig Seção 4.1 Busca com informação (ou heurística) Utiliza
Conceitos Básicos da Teoria de Grafos
 Conceitos Básicos da Teoria de Grafos Universidade Federal do Pampa - UNIPAMPA Engenharia da Computação Estrutura de Dados Profª Sandra Piovesan Grafos Uma noção simples, abstrata e intuitiva. Representa
Conceitos Básicos da Teoria de Grafos Universidade Federal do Pampa - UNIPAMPA Engenharia da Computação Estrutura de Dados Profª Sandra Piovesan Grafos Uma noção simples, abstrata e intuitiva. Representa
Teoria dos Grafos Aula 6
 Teoria dos Grafos Aula 6 Aula passada Busca em grafos Busca em largura (BFS Breadth First Search) Propriedades Aula de hoje BFS implementação Complexidade Busca em profundidade (DFS) Conectividade, componentes
Teoria dos Grafos Aula 6 Aula passada Busca em grafos Busca em largura (BFS Breadth First Search) Propriedades Aula de hoje BFS implementação Complexidade Busca em profundidade (DFS) Conectividade, componentes
Estratégias Evolutivas EEs. Prof. Juan Moisés Mauricio Villanueva
 Estratégias Evolutivas EEs Prof. Juan Moisés Mauricio Villanueva jmauricio@cear.ufpb.br www.cear.ufpb.br/juan Estratégias Evolutivas Desenvolvidas por Rechenberg e Schwefel, e estendida por Herdy, Kursawe
Estratégias Evolutivas EEs Prof. Juan Moisés Mauricio Villanueva jmauricio@cear.ufpb.br www.cear.ufpb.br/juan Estratégias Evolutivas Desenvolvidas por Rechenberg e Schwefel, e estendida por Herdy, Kursawe
Estruturas de Dados II. Caixeiro Viajante
 Estruturas de Dados II Prof. a Mariella Berger Caixeiro Viajante 1. Objetivo O objetivo deste trabalho é implementar diferentes soluções para o problema clássico do Caixeiro Viajante. 2. Introdução O Problema
Estruturas de Dados II Prof. a Mariella Berger Caixeiro Viajante 1. Objetivo O objetivo deste trabalho é implementar diferentes soluções para o problema clássico do Caixeiro Viajante. 2. Introdução O Problema
Técnicas Inteligência Artificial
 Universidade do Sul de Santa Catarina Ciência da Computação Técnicas Inteligência Artificial Aula 03 Métodos de Busca Parte 1 Prof. Max Pereira Solução de Problemas como Busca Um problema pode ser considerado
Universidade do Sul de Santa Catarina Ciência da Computação Técnicas Inteligência Artificial Aula 03 Métodos de Busca Parte 1 Prof. Max Pereira Solução de Problemas como Busca Um problema pode ser considerado
Resolução de problemas por meio de busca. Prof. Pedro Luiz Santos Serra
 Resolução de problemas por meio de busca Prof. Pedro Luiz Santos Serra Agentes de resolução de problemas Agente: É um elemento qualquer capaz de perceber seu ambiente por meio de sensores e de agir sobre
Resolução de problemas por meio de busca Prof. Pedro Luiz Santos Serra Agentes de resolução de problemas Agente: É um elemento qualquer capaz de perceber seu ambiente por meio de sensores e de agir sobre
Resolução de Problemas através de Busca. Prof. Júlio Cesar Nievola PPGIA - PUC-PR
 Resolução de Problemas através de Busca Prof. Júlio Cesar Nievola PPGIA - PUC-PR Solução de Problemas Sistemas inteligentes devem agir de maneira a fazer com que o ambiente passe por uma seqüência de estados
Resolução de Problemas através de Busca Prof. Júlio Cesar Nievola PPGIA - PUC-PR Solução de Problemas Sistemas inteligentes devem agir de maneira a fazer com que o ambiente passe por uma seqüência de estados
Estatística e Modelos Probabilísticos - COE241
 Estatística e Modelos Probabilísticos - COE241 Aula passada Análise da dados através de gráficos Introdução a Simulação Aula de hoje Introdução à simulação Geração de números aleatórios Lei dos Grandes
Estatística e Modelos Probabilísticos - COE241 Aula passada Análise da dados através de gráficos Introdução a Simulação Aula de hoje Introdução à simulação Geração de números aleatórios Lei dos Grandes
Árvores Binárias e AVL Felipe Barros Pontes Gustavo Márcio de Morais Cunha Márcio de Medeiros Ribeiro
 Universidade Federal de Alagoas - UFAL Departamento de Tecnologia da Informação - TCI Ciência da Computação Árvores Binárias e AVL Felipe Barros Pontes Gustavo Márcio de Morais Cunha Márcio de Medeiros
Universidade Federal de Alagoas - UFAL Departamento de Tecnologia da Informação - TCI Ciência da Computação Árvores Binárias e AVL Felipe Barros Pontes Gustavo Márcio de Morais Cunha Márcio de Medeiros
Inteligência Artificial
 Inteligência Artificial Aula 04 Busca Heurística Tiago Alves de Oliveira 1 Métodos de Busca Busca Cega ou Exaustiva: Não sabe qual o melhor nó da fronteira a ser expandido. Apenas distingue o estado objetivo
Inteligência Artificial Aula 04 Busca Heurística Tiago Alves de Oliveira 1 Métodos de Busca Busca Cega ou Exaustiva: Não sabe qual o melhor nó da fronteira a ser expandido. Apenas distingue o estado objetivo
Estatística e Modelos Probabilísticos - COE241
 Estatística e Modelos Probabilísticos - COE241 Aula passada Análise da dados através de gráficos Introdução a Simulação Aula de hoje Introdução à simulação Geração de números aleatórios Lei dos Grandes
Estatística e Modelos Probabilísticos - COE241 Aula passada Análise da dados através de gráficos Introdução a Simulação Aula de hoje Introdução à simulação Geração de números aleatórios Lei dos Grandes
Aprendizado de Máquina
 Aprendizado de Máquina Principais tópicos Aprendizado profundo André C P L F de Carvalho Posdoutorando: Isvani Frias-Blanco ICMC-USP Introdução Redes profundas Aprendizado profundo Redes autodecodificadoras
Aprendizado de Máquina Principais tópicos Aprendizado profundo André C P L F de Carvalho Posdoutorando: Isvani Frias-Blanco ICMC-USP Introdução Redes profundas Aprendizado profundo Redes autodecodificadoras
Redes Neurais (Inteligência Artificial)
") Redes Neurais (Inteligência Artificial) Aula 03 Resolução de Problemas por Meio de Busca Edirlei Soares de Lima Introdução Agentes Autônomos: Entidades capazes de observar o ambiente
Redes Neurais (Inteligência Artificial) Aula 03 Resolução de Problemas por Meio de Busca Edirlei Soares de Lima Introdução Agentes Autônomos: Entidades capazes de observar o ambiente
Árvores. SCC-214 Projeto de Algoritmos. Thiago A. S. Pardo. Um nó após o outro, adjacentes Sem relações hierárquicas entre os nós, em geral
 SCC-214 Projeto de Algoritmos Thiago A. S. Pardo Listas e árvores Listas lineares Um nó após o outro, adjacentes Sem relações hierárquicas entre os nós, em geral Diversas aplicações necessitam de estruturas
SCC-214 Projeto de Algoritmos Thiago A. S. Pardo Listas e árvores Listas lineares Um nó após o outro, adjacentes Sem relações hierárquicas entre os nós, em geral Diversas aplicações necessitam de estruturas
Técnicas de Inteligência Artificial
 Universidade do Sul de Santa Catarina Ciência da Computação Técnicas de Inteligência Artificial Aula 02 Representação do Conhecimento Prof. Max Pereira Para que um computador possa solucionar um problema
Universidade do Sul de Santa Catarina Ciência da Computação Técnicas de Inteligência Artificial Aula 02 Representação do Conhecimento Prof. Max Pereira Para que um computador possa solucionar um problema
IA - Planejamento II
 PO IA - Planejamento II Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 16 de Novembro de 2010 1 / 48 PO http://www.ic.unicamp.br/
PO IA - Planejamento II Professor Paulo Gurgel Pinheiro MC906A - Inteligência Articial Instituto de Computação Universidade Estadual de Campinas - UNICAMP 16 de Novembro de 2010 1 / 48 PO http://www.ic.unicamp.br/
PLANEJAMENTO DE CAMINHO USANDO BI-ARW MELHORADO E MAPA DE ROTAS
 PLANEJAMENTO DE CAMINHO USANDO BI-ARW MELHORADO E MAPA DE ROTAS Bruno Vilhena Adorno, Geovany Araújo Borges Laboratório de Robótica e Automação (LARA) Departamento de Engenharia Elétrica (ENE) - Universidade
PLANEJAMENTO DE CAMINHO USANDO BI-ARW MELHORADO E MAPA DE ROTAS Bruno Vilhena Adorno, Geovany Araújo Borges Laboratório de Robótica e Automação (LARA) Departamento de Engenharia Elétrica (ENE) - Universidade
3. Resolução de problemas por meio de busca
 Inteligência Artificial - IBM1024 3. Resolução de problemas por meio de busca Prof. Renato Tinós Local: Depto. de Computação e Matemática (FFCLRP/USP) 1 Principais Tópicos 3. Resolução de problemas por
Inteligência Artificial - IBM1024 3. Resolução de problemas por meio de busca Prof. Renato Tinós Local: Depto. de Computação e Matemática (FFCLRP/USP) 1 Principais Tópicos 3. Resolução de problemas por
1.1 Descrição do problema A programação genética (PG) é uma meta-heurística utilizada para gerar programas de computadores, de modo que o computador
 é uma meta-heurística utilizada para gerar programas de computadores, de modo que o computador") 1 Introdução 1.1 Descrição do problema A programação genética (PG) é uma meta-heurística utilizada para gerar programas de computadores, de modo que o computador possa resolver problemas de forma automática
1 Introdução 1.1 Descrição do problema A programação genética (PG) é uma meta-heurística utilizada para gerar programas de computadores, de modo que o computador possa resolver problemas de forma automática
Resolução de Problemas
 Resolução de Problemas Como um agente pode encontrar uma sequência de ações que alcança seus objetivos quando nenhuma ação isolada é capaz de fazê-lo. 1 Resolução de Problemas Agente reativo simples: baseia
Resolução de Problemas Como um agente pode encontrar uma sequência de ações que alcança seus objetivos quando nenhuma ação isolada é capaz de fazê-lo. 1 Resolução de Problemas Agente reativo simples: baseia
A inserção da chave 6 da árvore acima resulta na árvore abaixo.
 149 Árvores B+ As operações nas árvores B+ não são muito diferentes das operações das árvores B. Inserir uma chave em uma folha que ainda tenha algum espaço exige que se coloque as chaves desta folha em
149 Árvores B+ As operações nas árvores B+ não são muito diferentes das operações das árvores B. Inserir uma chave em uma folha que ainda tenha algum espaço exige que se coloque as chaves desta folha em
Modelagem Geométrica. André Tavares da Silva. Capítulo 12 do Foley Capítulo 4 de Azevedo e Conci Capítulo 11 de Mortenson
 Modelagem Geométrica André Tavares da Silva andre.silva@udesc.br Capítulo 12 do Foley Capítulo 4 de Azevedo e Conci Capítulo 11 de Mortenson Representações Decomposição Espacial Quadtrees Octrees BSPtree
Modelagem Geométrica André Tavares da Silva andre.silva@udesc.br Capítulo 12 do Foley Capítulo 4 de Azevedo e Conci Capítulo 11 de Mortenson Representações Decomposição Espacial Quadtrees Octrees BSPtree
Aprendizagem de Máquina
 Aprendizagem de Máquina Árvores de Decisão Poda e extensões Prof. Paulo Martins Engel UFRGS 2 Questões sobre Árvores de Decisão Questões práticas do aprendizado de AD incluem: Determinar até quando se
Aprendizagem de Máquina Árvores de Decisão Poda e extensões Prof. Paulo Martins Engel UFRGS 2 Questões sobre Árvores de Decisão Questões práticas do aprendizado de AD incluem: Determinar até quando se
O Problema da Colisão. Profa. Dra. Soraia Raupp Musse
 O Problema da Colisão Profa. Dra. Soraia Raupp Musse Porque tratar a colisão? Necessidade de repetir fenômenos físicos prevendo penetrações geométricas Objetivo Encontrar as interferências geométricas
O Problema da Colisão Profa. Dra. Soraia Raupp Musse Porque tratar a colisão? Necessidade de repetir fenômenos físicos prevendo penetrações geométricas Objetivo Encontrar as interferências geométricas
Projeto e Análise de Algoritmos
 Projeto e Análise de Algoritmos Aula 06 Busca em Profundidade e Busca em Largura Edirlei Soares de Lima Grafos (Revisão) G = (V, A) G: grafo; V: conjunto de vértices; A: conjunto
Projeto e Análise de Algoritmos Aula 06 Busca em Profundidade e Busca em Largura Edirlei Soares de Lima Grafos (Revisão) G = (V, A) G: grafo; V: conjunto de vértices; A: conjunto
Análise de Conglomerados Espaciais Via Árvore Geradora Mínim
 Revista Brasileira de Estatística(2002) Análise de Conglomerados Espaciais Via Árvore Geradora Mínima ABRIL/2010 SUMÁRIO Introdução Conglomerados Espaciais O Método da Árvore Geradora Mínima Algorítimo
Revista Brasileira de Estatística(2002) Análise de Conglomerados Espaciais Via Árvore Geradora Mínima ABRIL/2010 SUMÁRIO Introdução Conglomerados Espaciais O Método da Árvore Geradora Mínima Algorítimo
UNIVERSIDADE DO ESTADO DE MATO GROSSO - UNEMAT. Faculdade de Ciências Exatas e Tecnológicas FACET / Sinop Curso de Bacharelado em Engenharia Elétrica
 REDES NEURAIS ARTIFICIAIS AULA 03 Prof. Dr. André A. P. Biscaro 1º Semestre de 2017 INTRODUÇÃO Aprendizagem é um processo pelo qual os parâmetros livres de uma rede neural são adaptados através de um processo
REDES NEURAIS ARTIFICIAIS AULA 03 Prof. Dr. André A. P. Biscaro 1º Semestre de 2017 INTRODUÇÃO Aprendizagem é um processo pelo qual os parâmetros livres de uma rede neural são adaptados através de um processo
8 Conclusões e Trabalhos Futuros
 8 Conclusões e Trabalhos Futuros A presente dissertação apresentou uma proposta de algoritmo para exploração e mapeamento completa para robôs móveis na seção 6.1. Ao longo da dissertação os componentes
8 Conclusões e Trabalhos Futuros A presente dissertação apresentou uma proposta de algoritmo para exploração e mapeamento completa para robôs móveis na seção 6.1. Ao longo da dissertação os componentes
Aprendizado por Reforço
 Aprendizado por Reforço Fabrício Olivetti de França Universidade Federal do ABC Tópicos 1. Aprendizado por Reforço 2. Q-Learning 3. SARSA 4. Outras ideias 1 Aprendizado por Reforço Problemas de decisão
Aprendizado por Reforço Fabrício Olivetti de França Universidade Federal do ABC Tópicos 1. Aprendizado por Reforço 2. Q-Learning 3. SARSA 4. Outras ideias 1 Aprendizado por Reforço Problemas de decisão
4 Algoritmo de reconstrução de curvas
 4 Algoritmo de reconstrução de curvas Como visto na introdução, o algoritmo proposto neste trabalho é constituído pelas seguintes etapas: 1. Agrupamento espacial dos pontos de amostragem 2. Processamento
4 Algoritmo de reconstrução de curvas Como visto na introdução, o algoritmo proposto neste trabalho é constituído pelas seguintes etapas: 1. Agrupamento espacial dos pontos de amostragem 2. Processamento
Percursos em um grafo
 Percursos em um grafo Definição Um percurso ou cadeia é uma seqüência de arestas sucessivamente adjacentes, cada uma tendo uma extremidade adjacente à anterior e a outra a subsequente (à exceção da primeira
Percursos em um grafo Definição Um percurso ou cadeia é uma seqüência de arestas sucessivamente adjacentes, cada uma tendo uma extremidade adjacente à anterior e a outra a subsequente (à exceção da primeira
Tabelas de Hash MBB. Novembro de Algoritmos e Complexidade LEI-LCC
 Tabelas de Hash Algoritmos e Complexidade LEI-LCC 2010-2011 MBB Novembro de 2010 Tabelas e Acesso a Informação As estruturas de dados apresentadas anteriormente têm como objectivo o armazenamento de informação,
Tabelas de Hash Algoritmos e Complexidade LEI-LCC 2010-2011 MBB Novembro de 2010 Tabelas e Acesso a Informação As estruturas de dados apresentadas anteriormente têm como objectivo o armazenamento de informação,
ROBÓTICA PLANEJAMENTO DE TRAJETÓRIAS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial PLANEJAMENTO DE TRAJETÓRIAS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial PLANEJAMENTO DE TRAJETÓRIAS https://giovanatangerino.wordpress.com giovanatangerino@ifsp.edu.br
Grafos: Busca. Algoritmos e Estruturas de Dados 2. Graça Nunes
 Grafos: Busca Algoritmos e Estruturas de Dados Graça Nunes Percorrendo um grafo Percorrendo um Grafo Percorrer um grafo é uma tarefa fundamental Pense no caso de se procurar uma certa informação associada
Grafos: Busca Algoritmos e Estruturas de Dados Graça Nunes Percorrendo um grafo Percorrendo um Grafo Percorrer um grafo é uma tarefa fundamental Pense no caso de se procurar uma certa informação associada
Modelagem e Análise de Sistemas - COS767
 Modelagem e Análise de Sistemas - COS767 Aula de hoje Introdução à simulação Geração de números aleatórios Lei dos Grandes Números Geração de variáveis aleatórias: método da transformada inversa Simulação
Modelagem e Análise de Sistemas - COS767 Aula de hoje Introdução à simulação Geração de números aleatórios Lei dos Grandes Números Geração de variáveis aleatórias: método da transformada inversa Simulação