SENSORES E TRANSDUTORES
|
|
|
- Luiz Gustavo Fragoso Antas
- 8 Há anos
- Visualizações:
Transcrição
1 BR 470, Km140, Número Sl 14 - Polo Ind. de Rio do Sul Rio do Sul/SC - Fone/Fax: (47) S IBRATEC /MSN: vendas.cca@cca.ind.br - Site: AUTOMAÇÃO INDUSTRIAL PARTE 5 SENSORES E TRANSDUTORES Nestor Agostini Rio do Sul (SC), 01 de setembro de 2008

2 1. SENSORES E TRANSDUTORES O Vocabulário Internacional de Termos Técnicos apresenta as seguintes definições para transdutor e sensor: Transdutor de medição: Dispositivo que fornece uma grandeza de saída que tem correlação determinada com a grandeza de entrada. Exemplos: termopar, transformador de corrente, extensômetro elétrico de resistência, eletrodo de ph. Sensor: Elemento de um instrumento de medição ou de uma cadeia de medição que é diretamente afetado pelo mensurando. Exemplos: junta de medição de um termômetro termoelétrico, rotor de uma turbina para medir vazão, tubo de Bourdon de um manômetro, bóia de um instrumento de medição de nível, fotocélula de um espectrofotômetro. Na prática, os termos transdutor e sensor são freqüentemente tomados como sinônimos, visto que, em última análise, ambos convertem um tipo de energia em outra que possa ser mais facilmente medida. Há, porém, vários transdutores que não executam a função de um sensor (alto falantes, microfones, solenóides, etc.). Resumindo: os transdutores são diferentes dos sensores, embora, em aplicações específicas eles possam funcionar como tais Características gerais dos sensores e transdutores O sensor, com certeza, é o elemento mais básico e comum em qualquer processo de automação, principalmente industrial. É através desse dispositivo que todo o sistema é capaz de coletar informações da planta fabril e, com base nisso, executar determinada tarefa. Existem algumas características que são gerais a todos os sensores e outras que são especificas a um determinado tipo de sensor. Através do conhecimento destes princípios o engenheiro ou técnico pode escolher e dimensionar o melhor tipo segundo sua necessidade. A dúvida inicial para se determinar um sensor, geralmente, é: Quais são os parâmetros a serem observados na escolha ou dimensionamento de um sensor?. A resposta a esta dúvida depende do sensor, porém genericamente, há um conjunto de características importantes a serem consideradas, que são: a) Linearidade É o grau de proporcionalidade entre o sinal gerado e a grandeza física. Quanto maior, mais fiel é a resposta do sensor ao estímulo. Conseqüentemente, pode-se conferir uma maior precisão ao sistema. b) Faixa de atuação É o intervalo de valores da grandeza em que pode ser usado o sensor, sem destruição ou imprecisão. c) Histerese É a distância entre os pontos de comutação do sensor, quando um atuador dele se aproxima ou se afasta. 2

3 d) Sensibilidade É a distância entre a face do sensor e o atuador no instante em que ocorre a comutação. e) Freqüência de comutação É a quantidade máxima de mudanças de estado em um determinado intervalo de tempo. f) Distância sensora É a distância em que, aproximando-se o acionador da face sensora, o dispositivo muda de estado. Os transdutores de entrada dos sistemas de medida denominam-se sensores e convertem uma quantidade física ou química de entrada numa outra (geralmente elétrica) na sua saída. Os transdutores de saída dos sistemas de medida denominam-se atuadores e convertem uma quantidade (geralmente elétrica) de entrada numa outra física ou química na sua saída. A função de um transdutor pode ser descrito de diversas formas, destacam-se duas formas usuais: Estrutura Funcional: onde se descreve o método adotado para realizar a medida através de funções ou estruturas básicas. Estrutura Orgânica: onde se apresenta a função do sistema de medida através da implementação física de grupos de funções ou estruturas básicas. Figura 1.1: Descrição funcional e orgânica de um transdutor de pressão 2. ELEMENTOS BÁSICOS DE SENSORIAMENTO Em geral, os sistemas de sensoriamento possuem elementos sensores ou transdutores que atuam medindo ou transformando formas de energia. A realização das medições ou transformações de energia é efetuada por elementos de contato. 3
 na sua saída.")
4 2.1. Formas de energia Podem-se distinguir seis diferentes formas de energia: Energia Luminosa: Energia relacionada com ondas eletromagnéticas de radio, microondas, infravermelho, luz visível ultravioleta, raios-x, raios gama etc. Ex. Intensidade luminosa, comprimento de onda, polarização, fase, refletância, transmitância, etc. Energia Mecânica: Energia relacionada a forças, deslocamentos e fluxos mecânicos além da energia gravitacional. Ex. Força, pressão, torque, vácuo, vazão, volume, espessura, massa, nível, posição, deslocamento, velocidade, aceleração, inclinação, rugosidade, etc. Energia Térmica: Energia relacionada à cinética de átomos e moléculas. Ex. Temperatura, calor, calor específico, entropia, fluxo de calor. Energia Elétrica: Energia relacionada à eletricidade em geral. Ex. Tensão, corrente, carga, resistência, indutância, capacitância, constante dielétrica, polarização elétrica, freqüência, duração de pulsos, etc. Energia Magnética: Energia correspondente aos fenômenos do magnetismo em geral. Ex. Intensidade de campo, densidade de fluxo, momento magnético, magnetização, permeabilidade, etc. Energia Química: Energia relacionada com os fenômenos de interação química da matéria. Ex. Composição, concentração, taxa de reação, toxicidade, potencial de oxi-redução, PH, etc. Em geral, os transdutores atuam convertendo as formas de energia apresentadas em sinais elétricos, visto que é mais fácil realizar medidas nestes últimos. Figura 2.1: Interação entre as várias formas de energia 4

5 Existem uma diversidade de efeitos físicos ou químicos utilizados para a realização de conversão de energia nos transdutores de entrada ou saída de um sistema de medida. Como em geral, no caso dos transdutores de entrada ou sensores, deseja-se converter estes sinais para o domínio elétrico ou do domínio elétrico para outro domínio no caso dos transdutores de saída ou atuadores, apresenta-se alguns dos efeitos mais usados para a implementação de sensores e atuadores, nas tabelas a seguir: Efeito Fotovoltáico Fotocondutividade Tabela 2.1: Transdução de Energia Luminosa Descrição Uma tensão é gerada pela radiação incidente na junção de dois materiais diferentes O aumento da condutividade elétrica de um material devido à incidência de uma radiação Fotoeletricidade Elétrons e lacunas são gerados e separados na área da junção devido a uma radiação incidente Fotoluminiscência Fotodieletricidade Electrolumiscência Uma energia radiante é emitida devido à uma radiação incidente com menor comprimento de onda A mudança de uma constante dialética devido a uma radiação incidente Uma energia radiante é emitida devido a ação de um campo elétrico Incandescência Emissão de radiação devido ao movimento térmico de átomos ativados por uma corrente elétrica Efeito Piezoresistividade Piezoeletricidade Magnetostrição Fotoelasticidade Tabela 2.2: Transdução de Energia Mecânica Descrição Variação da resistência elétrica de um material devido à mudança da condutividade ou forma quando sujeito à deformações mecânicas Geração de cargas superficiais devido a forças mecânicas e vice-versa Deformação mecânica de um material devido ao campo magnético ou mudança de magnetização do material devido à deformação mecânica Geração de refração dupla devido a forças mecânicas 5

6 Termoelasticidade Triboeletricidade Geração de uma tensão em duas regiões de um metal devido a deformações mecânicas ou diferenças de temperatura na região Geração de cargas elétricas superficiais devido ao atrito entre dois materiais Tabela 2.3: Transdução de Energia Térmica Efeito Descrição Termoeletricidade (Seebeck) Geração de uma corrente elétrica num circuito fechado de dois condutores com diferentes temperatura de junção Piezoeletricidade Mudança de polarização elétrica devido à variações da temperatura Incandescência Emissão de energia luminosa devido ao aquecimento de um material Peltier Geração de uma diferença de temperatura entre duas junções devido a passagem de uma corrente elétrica Nerst Geração de um campo elétrico devido a um gradiente de temperatura e campo magnético Supercondutividade Mudança da condutividade para um valor perto de infinito abaixo de uma temperatura crítica Eletro-termico Geração de calor em um condutor devido a passagem de uma corrente elétrica Termocondutividade Mudança da condutividade elétrica devido à variações da temperatura Efeito Hall Magneto-resistência Magnetostrição Eletromagnético Tabela 2.4: Transdução de Energia Magnética Descrição Geração de um campo elétrico em um condutor, devido à corrente e campo magnético que se encontram mutuamente perpendiculares Mudança da resistividade de um material devido ao campo magnético Uma deformação mecânica é gerada num material ferromagnético pelo campo magnético incidente Mudança da magnetização devido à uma corrente elétrica Maggi-Righi-Leduc Mudança da condutividade térmica devido ao campo magnético incidente 6

7 Suhl Efeito Volta Galvano-elétrico Químico-magnético Eletroquímico Termoquímico Químico-elétrica Tabela 2.5: Transdução de Energia Química Mudança de condutividade na superfície de um semicondutor devido ao campo magnético Descrição Geração de tensões entre dois metais diferentes Geração de tensões entre dois metais diferentes quando imersos num eletrólito A variação da magnetização de um material magnético pela absorção de um gás Mudança de estrutura devido a uma corrente elétrica Mudança de estrutura devido a uma variação da temperatura Mudança na condutividade da superfície de um semicondutor quando em contato com um eletrólito 3. PRINCIPAIS MODALIDADES DE SENSORES DE USO INDUSTRIAL 3.1. Sensores de posição Os sensores de posição, em geral, convertem, energia mecânica em sinais elétricos. Neste grupo encontram-se potenciômetros, encoders, sincros, indutivos de deslocamento, sensores a laser e os ultrassônicos. a) Potenciômetro: é um sensor de posição do tipo absoluto e com saída analógica. Basicamente, consiste de uma resistência elétrica de fio enrolado ou de uma pista de material condutor, distribuídos ao longo de um suporte que pode ser em forma de arco ou linear. Há um cursor que desliza sobre o material condutivo ligado a um contato. Dependendo da posição em que se encontra o cursor a resistência entre o início da pista e o próprio cursor é alterada. Esta alteração de resistência é utilizada como indicador de posição. A taxa de variação da resistência em função do giro ou do deslizamento do cursor pode ser: - Linear: a variação da resistência é diretamente proporcional ao ângulo de giro; - Logarítmica: a variação segue uma curva log; - Anti-logaritmica: a variação segue uma curva anti-log; - Etc. Na prática há vários tipos de potenciômetros. 7

8 Figura 3.1: Estrutura dos potenciômetros O tipo de aplicação determina o modelo a ser escolhido. Figura 3.2: Potenciômetros comerciais Esquematicamente o potenciômetro possui o seguinte símbolo. Figura 3.3: Símbolo de potenciômetro 8

9 Para a escolha do tipo de potenciômetro a ser aplicado a um sistema de automação é necessário considerar itens tais como: precisão, sensibilidade, formato mecânico, etc. Exercício resolvido: O esquema abaixo representa um sistema de automação onde um potenciômetro linear de 100 kω de resistência total recebe a informação da posição de giro de uma polia. Sabendo-se que o ângulo de giro do potenciômetro é de 270 e que os valores mínimo e máximo de resistência entre os pontos B e A é 1 kω e 99 kω, respectivamente, determine qual a voltagem mínima, máxima e qual sua variação por grau de giro da polia. Solução: Figura 3.4: Utilização de potenciômetro A menor tensão obtida ocorre quando a resistência entre B e A é de 1 kω. Nesta condição a resistência entre B e C é de 99 kω. 1 Pela regra da divisão de tensão tem-se: Vsinal minimo =.24 = 0,24V Vsinal máximo =.24 = 23,76V 100 Para um giro de 270, obtém uma variação de tensão de 23,76 0,24 = 23,56 V Através de regra de três, concluí-se que: o 1 = 8,8mV b) Encoder: o encoder é um sensor de posição digital, ou seja, a saída é em formato de pulsos elétricos e não de uma variação de tensão como nos potenciômetros. Do ponto de vista de construção física externa, os encoders tem semelhança com um potenciômetro. 9

10 Figura 3.5: Encoder Internamente, no entanto, não há nenhuma similaridade com os potenciômetros. Os pulsos são gerados por um rotor que gira uma ou mais pistas circulares, concêntricas com faixas opacas e translúcidas. Sobre essas faixas é instalado um sensor foto acoplador, geralmente, foto transistor e led. O led produz luz e esta somente atinge o foto transistor nos momentos em que a faixa translúcida passa pelo sensor, desta maneira são gerados pulsos 0, quando a faixa preta passa pelo sensor e 1 quando a faixa translúcida passa pelo sensor. Figura 3.6: Princípio de funcionamento do encoder Quanto a forma de apresentação dos pulsos, os encoders podem ser classificados em: b1) Incrementais: são encoders que contam pulsos a partir de um ponto zero. O início da contagem pode ocorrer a qualquer momento, por isso são ditos incrementais. É o mesmo principio de funcionamento do mouse dos computadores. Existem vários modelos de encoders incrementais, alguns possuem apenas um canal, ou seja, apenas uma pista de faixa de forma que fornecem somente uma seqüência de pulsos sem nenhuma espécie de formatação. Existem também modelos que fornecem, além da seqüência de pulsos dentro de cada giro, um pulso a cada volta, assim consegue-se determinar o número de voltas. Outro modelo possui a capacidade de perceber o sentido de rotação. Um sistema para determinar o sentido de rotação consiste na utilização de dois sensores separados entre si por p+1/4, onde p é o passo do disco. Ao girar o rotor produz pulsos quadrados em cada sensor defasados de ¼ do período se o rotor estiver girando em um sentido. No outro sentido a defasagem aumenta para ¾ do período. Assim, consegue-se determinar o sentido da rotação. 10

11 A A B B SENTIDO HORÁRIO SENTIDO ANTI-HORÁRIO Figura 3.7: Funcionamento do encoder incremental b2) Absolutos: os encoders absolutos são do tipo multi-pista. Eles possuem, internamente, um conjunto de pistas que criam um código. Desta maneira, em cada posição ele gera uma combinação de pulsos diferente. Os códigos usualmente utilizados são o Gray, o BCD ou o binário puro. b3) Especificação de encoders Figura 3.8: Funcionamento do encoder absoluto Para especificar encoders é necessário considerar alguns aspectos importantes, tais como: 1. Tipo: decidir entre um encoder incremental ou um absoluto. Em geral, os encoders absolutos são bem mais caros do que os incrementais. A decisão entre um tipo ou outro deve ser 11

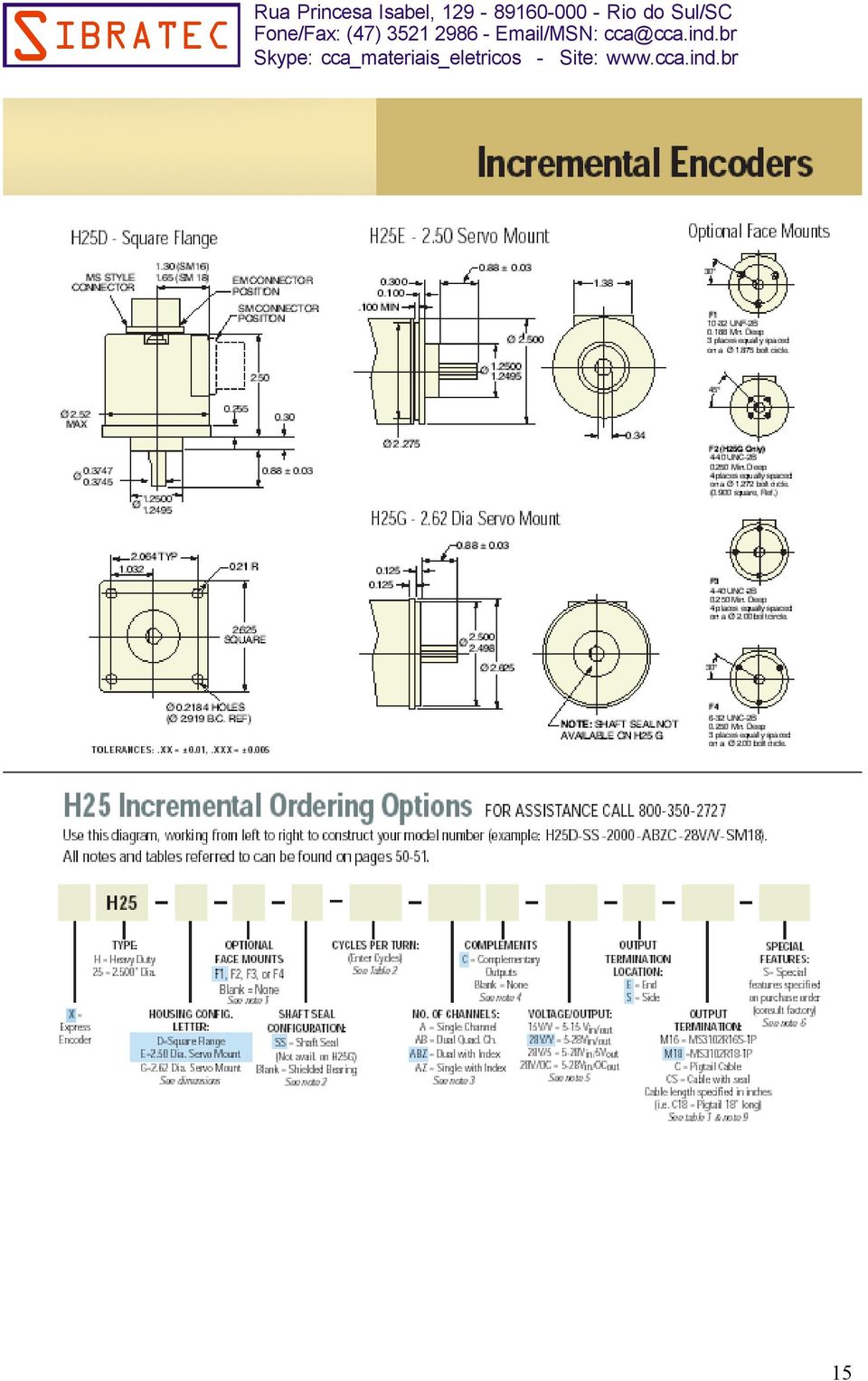
12 tomada em função do que se pretende desenvolver. Com o encoder absoluto sempre é possível saber a posição correta de um dispositivo, pois o código gerado é diferente para cada posição. Com encoder incremental, geralmente, é necessário ressetar o sistema e iniciar a partir de um ponto definido para ajustar a posição. A tentativa de ajustar posições com um encoder incremental pode levar a erros acumulativos, que ao final de um percurso podem gerar grandes distorções em relação ao desejado. Observe a figura. Suponha que o ponto A seja o ponto zero e que em quatro passos pretende-se atingir o ponto G, de modo cumulativo: - no primeiro movimento deseja se atingir B, porém, devido a erros o ponto atingido foi C; - no segundo movimento pretende-se chegar ao ponto D, porém, como já se está partindo de um ponto errado a tendência é que haja um erro em D que é o erro já existente somado com um novo erro que pode ser introduzido; assim chega-se a E; - no trajeto seguinte ocorre o mesmo problema, com o erro tendendo a aumentar. O ponto correto seria o F porém pode-se atingir o ponto G. O procedimento recomendado para esta situação é o seguinte: - primeiro realiza-se o movimento de A para B e, do mesmo modo que no caso anterior pode haver um erro e pode-se chegar em C; - no segundo passo resseta-se a máquina, ou seja, volta-se ao ponto A (zero); - no terceiro movimento tenta-se atingir D. Pode haver um erro, porém o fato de estar partindo de um ponto conhecido a tendência é que este erro seja menor do que o obtido no modo anterior; - procede-se da mesma maneira para chegar a F. Primeiro resseta-se a máquina e, em seguida, realiza-se o movimento até F, podendo haver um erro, porém menor do que o erro obtido no modo de operação anterior. A B C D E F G Figura 3.9: Propagação de erros 2. Tensão de alimentação: existem encoders para as mais diversas tensões de alimentação. Evidentemente, deve-se escolher a que melhor se adapta ao restante do projeto; 3. Pulsos por volta (para os modelos incrementais): quanto maior for o número de pulsos por volta, maior é a sua resolução, porém, o aumento da resolução implica no aumento de custo; 4. Número de canais: (para os modelos incrementais): 5. Número de bits de resolução (para os absolutos): o aumento do número de bits de resolução implica em aumento de custo 6. Freqüência máxima de operação: os encoders são limitados a certa velocidade máxima que precisa ser avaliada quando da aplicação; 7. Tipo de sinal de saída: sempre depende do restante do sistema, a não ser que seja um sistema totalmente novo onde pode ser especificado qualquer saída. Dentre as várias modalidades de sinal 12

13 de saída tem-se: NPN, PNP são saídas a transistor em coletor aberto. A saída NPN, push pull, TTL. 8. Tipo de fixação: axial ou radial. c) Folha de especificações típica de um encoder 13

14 14

15 15
16 16

17 Figura 3.10: Folha de especificações técnicas do encoder incremental 17

18 18
19 19

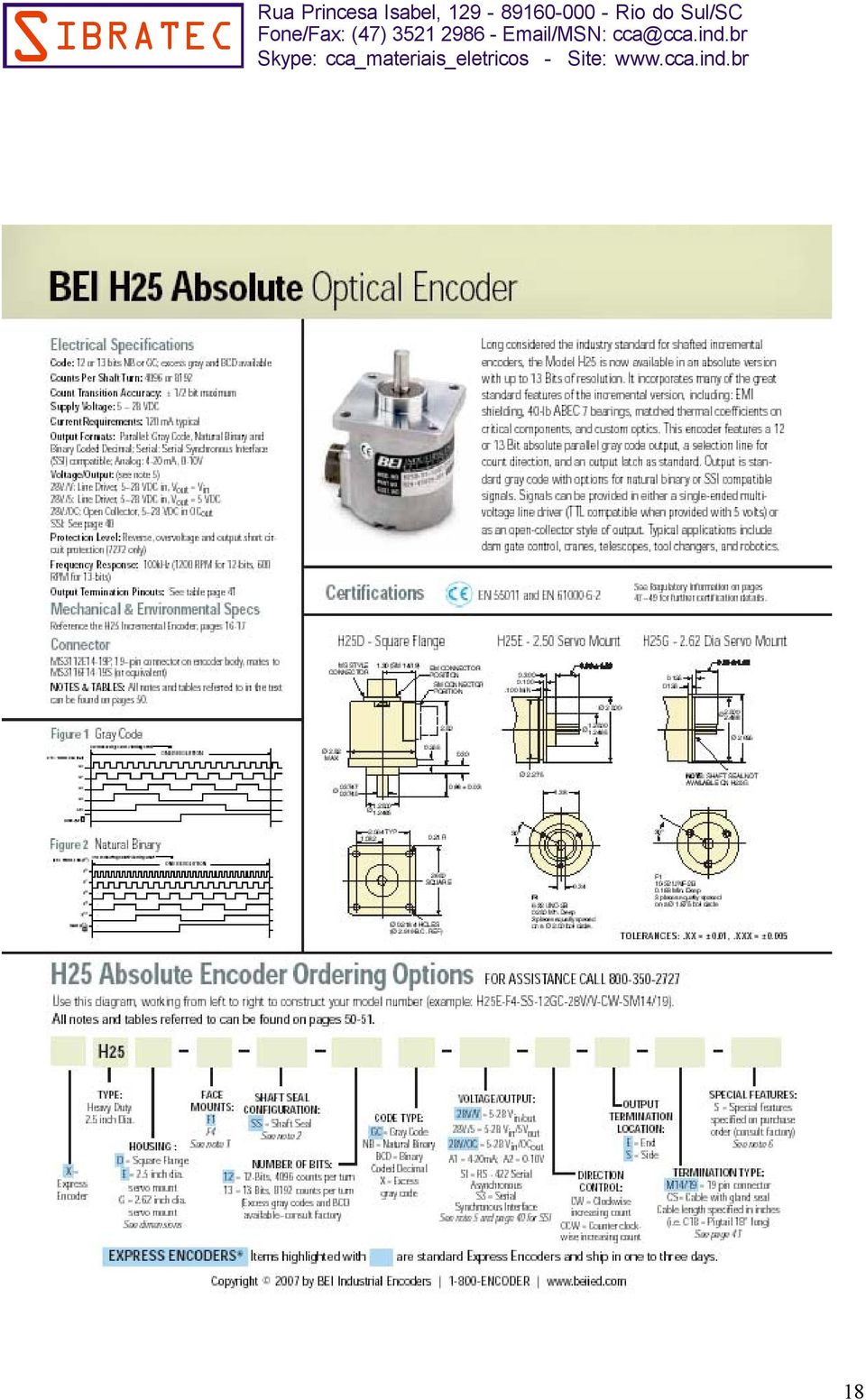
20 Figura 3.11: Folha de especificações técnicas do encoder absoluto 20

21 c4) Exercícios resolvidos: 1. Um determinado sistema requer a monitoração de deslocamento de uma peça (P) sobre um cilindro com diâmetro de 100 mm, ligado a um motor (M) com rotação de 900 rpm. Não nenhuma possibilidade de haver escorregamento entre a peça P e o cilindro (C). Um encoder é ligado ao eixo do cilindro. Admitindo que o avanço da peça necessita ser monitorado em até 1 mm com uma precisão de 0,1 mm. Admitir que o sistema avança, produz uma peça, recua, recebe o novo material, avança novamente, produz outra peça e assim sucessivamente. Especificar o encoder incremental necessário a esta aplicação. M SENTIDO DE ROTAÇÃO DO MOTOR DURANTE O AVANÇO DA PEÇA AVANÇO DA PEÇA P C ENCODER Figura 11.14: Uso do encoder Solução: Primeiramente é necessário saber a relação entre o avanço da peça e a rotação do motor, ou seja, quantos milímetros a peça avança para cada rotação do motor. Esta relação é conseguida através do diâmetro do cilindro. Avanço = d. π Avanço = 100.3,14 Avanço = 314mm Assim, a cada rotação a peça avança 314 mm. Conforme solicitado é necessária uma definição de 1 mm com exatidão de 0,1 mm. Ou seja são necessários, no mínimo, 10 pulsos por milímetro de avanço. O encoder pode então ser especificado: Número _ de _ pulsos = 314x10 Número _ de _ pulsos = 3140 / rotação Precisa-se de um encoder com, no mínimo 3140 pulsos por rotação. As demais especificações são todas obtidas do enunciado do problema: - freqüência máxima de operação: 900rpm ou 15 Hz; - Necessita de dois canais, pois é necessário determinar o sentido de rotação do motor; 2. Resolver o mesmo exercício anterior utilizando um encoder absoluto com saída digital direta. Neste caso é necessário especificar o número de bits de resolução. 21
22 Solução: A relação entre o avanço da peça e a rotação já é conhecida do problema anterior, 314 mm por rotação. Para obter a resolução de 0,1 mm são necessárias 3140 posições. Para a saída digital direta vale a seguinte relação: x = = 3140 x ln(2 ) = ln(3140) x.ln(2) = ln(3140) ln(3140) ln(2) x = 11,6 Onde x representa o número de bits necessários. 8,052 0,693 Observar que 11 bits são poucos e 12 bits é o primeiro inteiro superior a 11,6. Isto significa que o encoder precisa ter uma resolução de 12 bits. As demais especificações são as mesmas do problema anterior. 2 x = d) Sincros e resolvers: são transdutores de posição angular eletromagnéticos. Seu principio de funcionamento se resume em um transformador onde um dos enrolamentos é rotativo. Na figura é mostrado em sincro trifásico. Quando se aplica uma tensão ao enrolamento rotativo, se recolhe em cada fase dos enrolamentos estáticos uma tensão cujo valor é dado por: V1 2 = V. senθ Figura 3.12: Funcionamento do sincro 22
23 Onde V1 e V2 são tensões que dependem dos aspectos construtivos do sincro e θ é o ângulo entre o enrolamento fixo e o enrolamento rotativo. Observar que, pelo fato do estator ser trifásico é possível determinar, além do deslocamento, também seu sentido. No caso de existir somente uma fase no estator há uma indefinição do sentido do deslocamento, visto não haver outras fases para realizar a comparação de tensões. Para solucionar este problema foi implementado um sincro com uma configuração especial, denominado de resolver. Os enrolamentos do estator são alimentados em série, produzindo um campo estacionário sobre o eixo y. Os enrolamentos do rotor recolhem tensões diferentes em função da montagem. Figura 3.13: Funcionamento do resolver e) Inductosym: os sensores inductosym possuem como principio de funcionamento eletromagnético e são utilizados em máquinas de controle numérico. O dispositivo consiste de uma régua estática e um cursor que se movimenta sobre ela. A régua contém um filme metálico com a forma de uma onda quadrada, com um período (g) em (mm). O cursor tem dois padrões semelhantes e quando acoplado à régua o sistema se comporta como um transformador plano, assim o cursor será o primário e a régua o secundário. Se forem aplicadas tensões no primário: com ω = freqüência da excitação A tensão no secundário será: e e 1 2 = e.sen( ω.t) = e.cos( ω.t) es = e x.sen( ω.t + g.s) sendo s = o deslocamento da bobina e1 em um período. Notar que quando o deslocamento é igual a um período da régua. se completará um ciclo 23
24 Figura 3.14: Funcionamento do inductosym f) Laser: o laser é utilizado na detecção de distância utilizando as propriedades da interferência de raios luminosos. Em geral, a emissão do laser é pulsada em certa freqüência de operação. O princípio de funcionamento se baseia na superposição de duas ondas de mesma freqüência: uma direta e outra refletida. A onda resultante passa por valores máximos e mínimos de acordo com a fase do sinal refletido (franjas). Os sensores industriais geram um raio de luz que se divide em duas partes ortogonais mediante um separador. Um raio é aplicado sobre um espelho plano fixo, enquanto que o outro se reflete no objeto em que se deseja determinar a distância. Os dois raios se sobrepõem novamente no separador, de forma que ao separar-se geram máximos mínimos a cada múltiplo do comprimento de onda da luz. A distância é determinada contando as oscilações (conhecidas também como franjas), obtendo-se uma saída digital de grande precisão. OBJETO QUE SE DESEJA DETERMINAR A DISTÂNCIA RAIO REFLETIDO RAIO ENVIADO ESPELHO PLANO SEPARADOR DE RAIOS GERADOR DE RAIOS LASER CONJUNTO FOTODETECTOR VISUALIZADOR MÉTRICO PROCESSADOR CONTADOR VISUALIZADOR DE FRANJAS Figura 3.15: Funcionamento do sensor laser g) Ultrassônicos: os sensores ultrassônicos baseiam-se no princípio da reflexão do som. É emitido um raio ultrassônico, geralmente pulsado, com freqüência da ordem de 200 khz ou mais, que atinge o objeto do qual se quer determinar a distância e mede-se o tempo até o retorno do sinal refletido. Usualmente são empregados para detectar o nível em depósitos de sólidos, falhas do tipo gretas em montagens industriais, profundidade de água, medições remotas de distância, etc. 24
25 h) Fotoelétricos de triangulação: os sensores fotoelétricos de triangulação conseguem determinar a distância em que se encontra um ponto utilizando diodos sensíveis à posição. São utilizados dois receptores e tanto os receptores como o emissor são munidos de lentes asféricas que permitem maior precisão de detecção. O sensor funciona da seguinte maneira: o emissor emite um feixe de luz que é refletido pelo objeto alvo. A luz refletida chega às lentes asféricas dos receptores que se encarregam de concentrar a luz em um ponto dos diodos sensíveis à posição. Este componente tem a característica de fornecer duas correntes elétricas que são proporcionais ao ponto de incidência da luz. Como o ponto de incidência da luz nos diodos muda de acordo com a posição do objeto pode-se, através de um circuito de controle, selecionar a área de detecção do sensor. Além disso, pelo fato destes diodos não dependerem da quantidade de luz refletida pelo objeto e sim de sua posição, pode-se detectar objetos de diferentes cores ou multicoloridos sem a necessidade de reajustar a sensibilidade. 4. SENSORES PARA DETECÇÃO DE EVENTOS 4.1. Sensor indutivo: O sensor indutivo, também conhecido como sensor de proximidade, é capaz de detectar a presença (ou não) de um objeto metálico quando este estiver a determinada distância da sua face (distância sensora). Seu princípio de funcionamento é baseado na geração de um campo eletromagnético de alta freqüência, que é desenvolvido por uma bobina ressonante instalada na face sensora (Figura 4.1). Figura 4.1: Funcionamento do sensor indutivo A bobina faz parte de um circuito oscilador, que em condição normal (não acionada), gera um sinal senoidal. Quando um metal se aproxima do campo, este através da corrente de superfície absorve energia, reduzindo a amplitude do sinal gerado no oscilador. Esta variação do valor original é, então, detectada e aciona o estágio de saída. Na Figura 4.2 pode-se observar o diagrama eletrônico simplificado de um sensor indutivo. 25
26 Figura 4.2: Diagrama eletrônico do sensor indutivo Vantagens do uso de sensores indutivos ao invés de chaves fim de curso convencionais - Número de manobras: por não ter partes móveis (acionamento estático), a capacidade de operação de um sensor indutivo é muito maior que uma chave convencional; - Ausência de contato físico: como se trata de um sensor de proximidade, não há necessidade de contato físico com a parte em movimento. Novamente, isso contribui para o aumento significativo da vida útil do sistema; - Velocidade de atuação: ela é maior que a de uma chave mecânica, uma vez que não há inércia na sua operação. A Figura 4.3 ilustra um exemplo do campo de atuação, tendo como referência sua superfície ativa. Figura 4.3: Campo de atuação do sensor indutivo A Figura 4.4 traz alguns exemplos de aplicação. 26
27 Figura 4.4: Aplicações do sensor indutivo Outro "nome" atribuído ao sensor indutivo é sensor "não faceado". Essa denominação origina-se do aspecto de instalação do componente, que por razões óbvias deve ter uma "zona livre" de metal ao seu redor. Através da Figura 4.5, pode-se estimar as distâncias mínimas que um sensor deste tipo deve respeitar, caso seu alojamento seja metálico, a fim de que não ocorram comutações errôneas. Figura 4.5: Atuação do sensor indutivo Como será visto a seguir, sensores para materiais isolantes (não metálicos) são, também, classificados como faceados, uma vez que "faceiam" seu alojamento sem correr riscos de acionamento indevido. Os sensores industriais, sejam eles indutivos ou não, podem ter suas saídas nas configurações pnp ou npn. A Figura 4.6 mostra como, no primeiro, caso (pnp) a comutação da carga é feita através do pólo positivo da fonte. Tomando um CLP como exemplo, a carga seria acionada com + 24 Vcc no seu terminal livre. Já a configuração npn conecta a carga ao zero volt, uma vez que essa já está com o pólo positivo ligado. Figura 4.6: Sensor indutivo PNP e NPN 27
28 As saídas, normalmente, podem ser de 2, 3, ou 4 condutores, sendo esse último com (no mínimo) um contato tipo NA e um NF (Figura 4.7). Figura 4.7: Tipos de saídas de sensores indutivos 4.2. Sensor capacitivo: Ao contrário do sensor indutivo, que funciona através da formação de um campo eletromagnético e é indicado para detecção de partes metálicas, o capacitivo funciona segundo um campo elétrico e é ideal para sensoriar materiais isolantes (líquidos, plásticos, vidros, entre outros). Para compreender melhor como ele faz isso, é necessário relembrar alguns conceitos básicos dos capacitores. A capacidade de armazenar cargas de um capacitor, pode ser expressa pela fórmula: Onde; e = constante dielétrica ou permissividade. S = área entre placas d = distância entre placas. Concluí-se, então, que a capacidade de armazenar cargas do componente é diretamente proporcional a área formada entre as placas e a constante dielétrica, e inversamente à distância entre elas. Como referência, o ar possui uma constante dielétrica e0 = 1. Convém lembrar que este valor é uma referência, e que dizer que "1" é igual a 8,9 x F/m (Faraday/metro). A seguir, na Tabela 4.1 é apresentada a constante dielétrica dos materiais mais comuns. Quando se atribui 2 à madeira, por exemplo, significa que, fisicamente, ela apresenta 17,8 x F/m (2 x eo). 28
29 Tabela 4.1: Constante dielétrica de materiais mais comuns T A detecção do objeto neste tipo de sensor ocorre segundo uma variação da capacitância. Conforme se viu, esta depende de três variáveis em um capacitor. No sensor capacitivo, entretanto, duas delas já são fixadas e determinadas na concepção do dispositivo (S e d). A Figura 4.8 mostra que a diferença fundamental entre o sensor capacitivo e o capacitor convencional é que as placas não estão uma de frente para a outra, mas sim uma ao lado da outra. A área e a distância entre elas é fixa, e como as placas estão dispostas segundo esta geometria, a capacitância do elemento na ausência de um material dielétrico pode ser considerada desprezível. Figura 4.8: Capacitor convencional X sensor capacitivo Uma vez que um objeto dielétrico aproxima-se, porém, ao adentrar no campo elétrico sob a superfície do eletrodo, causa uma mudança na capacitância do conjunto. Este fenômeno produz uma oscilação com uma amplitude tal que seja detectada por um circuito e convertida em um comando para a comutação do estado da saída (Figura 4.9). 29
30 Figura 4.9: Funcionamento do sensor capacitivo Resumindo, o sensor capacitivo funciona de acordo com a variação da constante dielétrica do material a ser detectado, através de um campo elétrico, e cuja alteração da sua capacitância aciona um comando de chaveamento na saída Sensores ópticos Os sensores óticos, além de serem utilizados para a detecção de distância entre corpos, conforme já visto anteriormente, servem também para a detecção de eventos. Existem várias configurações que podem ser utilizadas para este fim. a) Difuso Nesta configuração, o transmissor e o receptor são montados na mesma unidade, sendo que o acionamento da saída ocorre quando o objeto a ser detectado entra na região de sensibilidade e reflete para o receptor a feixe de luz emitido pelo transmissor (Figura 4.10). Figura 4.10: Sensor ótico difuso b) Reflexivo O sensor óptico reflexivo, também conhecido como retro-reflexivo, assim como o difuso, tem o transmissor e o receptor montados em uma única unidade. O feixe de luz chega ao receptor após a incidência em um espelho e o acionamento da saída ocorre quando o objeto interrompe o feixe (Figura 4.11). 30
31 Figura 4.11: Sensor ótico reflexivo Este tipo de sensor é muito utilizado em segurança de áreas, conforme se pode ver na Figura Um robô é cercado por um feixe infravermelho que, após reflexões sucessivas, atinge o receptor. Caso um objeto interrompa esse feixe, o sensor será atuado, paralisado o trabalho. Figura 4.12: Aplicação do sensor ótico reflexivo Um cuidado a ser tomado na utilização de um sistema como este, é orientar o usuário quanto a limpeza dos sensores e espelhos. A sujeira pode gerar acionamentos indevidos. Caso o ambiente seja muito rico em poeira ou qualquer outra partícula em suspensão (névoa de óleo, por exemplo), 31
32 talvez seja mais indicado utilizar outro tipo de sensor. c) Barreira de Luz Este sensor, ao contrário dos dois anteriores, é montado em duas unidades distintas: uma transmissora e outra receptora. Cada unidade fica de um lado da trajetória do objeto-alvo, uma vez que este interrompe o feixe, e o sensor é ativado. Atualmente este é o tipo de sensor mais utilizado para realizar proteção de máquinas industriais onde o operador manipula objetos com a mão Sensores ultra-sônicos: O sensor ultra-sônico emite pulsos cíclicos ultra-sônicos que, quando refletidos por um objeto, incidem no receptor, acionando a saída do sensor. Tanto o emissor como o receptor estão montados na mesma unidade, portanto, é necessário que haja uma reflexão (eco) do ultra-som de modo que este ative o receptor. Figura 4.13: Utilização do sensor ultrassônico Neste caso também se deve ter cuidado quando se decidir utilizar um sensor deste tipo, devido ao alinhamento angular. Dependendo da inclinação do alvo o eco pode desviar-se para uma direção diferente do sensor, não chegando ao receptor (localizado no mesmo componente). Geralmente este tio de sensor permite uma inclinação máxima de mais ou menos 3º (figura 4.13). Assim como o óptico, o sensor ultra-sônico pode suprimir o fundo (desprezar o eco do que não é objeto alvo de detecção). Neste caso, tem-se o tipo de barreira de reflexo. Vale reparar que o sensor ultra-sônico pode operar tal qual um óptico, no que se refere a capacidade de detecção (Figura 4.14). 32
33 Figura 4.13: Utilização do sensor ótico e ultrassônico Sensores de temperatura: A temperatura é a medida da agitação molecular de um corpo. A impossibilidade de realizar diretamente esta medição conduziu ao desenvolvimento de métodos indiretos de medida. Estes métodos estão baseados nos efeitos da temperatura sobre a matéria. Os principais sensores utilizados são: a) Termopar: A temperatura é medida através de uma diferença de tensão originada na junção de dois metais diferentes posicionados em dois locais com temperaturas diferentes. Uma das junções é a de medição; a outra, a de referência (Figura 7.31). A junção de medição é colocada junto ao material cuja temperatura se quer medir enquanto a outra junção é colocada em um ambiente com temperatura conhecida. Quando existe diferença entre as temperaturas das duas junções, é gerada uma diferença de potencial entre as mesmas (Figura 11.33). O valor desta diferença de potencial relaciona-se à temperatura da junção de medição. Na prática, os sensores do tipo termopar são feitos de várias ligas de metais, de acordo com a faixa de temperatura que se deseja medir. Por exemplo: o termopar cobre/constantam é útil na faixa de -180 C a 400 C; o platina/platina-ródio é utilizável na faixa de 0 C a 1500 C. 33
34 MATERIAL X A B MATERIAL Y MATERIAL Y CALOR v Figura 4.14: Princípio de funcionamento dos termopares. A junção A é a de referência. B é a junção de medição b) Termistor: A resistência elétrica é uma característica afetada pela temperatura em, praticamente, todos os elementos resistivos utilizados. Para alguns tipos de materiais, a resistência é alterada de modo significativo pela temperatura. Estes materiais são utilizados para a fabricação de um tipo especial de resistor, denominado termistor. Em geral, são fabricados com óxidos de vários metais, como níquel, manganês, ferro, cobalto e cobre, encapsulados em resina epóxi ou em vidro. A medição cuidadosa da resistência serve como indicativo da temperatura com precisão típica de ±0,1 C. Com estes dispositivos é possível alcançar resolução de 0,001 C. Podem ser utilizados dentro de faixas de temperatura que vão deste -80 C até 150 C. Existem dois tipos de termistores, os PTC (Positive Temperature Coefficient coeficiente positivo de temperatura) e os NTC (Negative Coefficient Temperature coeficiente negativo de temperatura). Nos termistores tipo PTC, a resistência é diretamente proporcional à variação da temperatura. Nos NTC, a resistência decresce com o aumento da temperatura, porém, a variação não é linear (Figura 4.15). R (Ω) PTC NTC Temp ( C) Figura 4.15: Curvas características de variação da resistência em função da temperatura nos termistores 34
35 c) Semicondutor: os sensores de temperatura baseados em semicondutores aproveitam a propriedade das junções PN de alterarem a sua queda de tensão em função da temperatura. Podese demonstrar que, para uma junção PN de silício, a queda de tensão varia da seguinte maneira (MALVINO, 1997): V T = 2 mv / C Esta variação da queda de tensão passou a ser utilizada para construir sensores de temperatura. Estes sensores são bastante lineares e muito sensíveis, dentro da sua faixa de atuação. Atuam em faixas de temperatura desde -80 C até 150 C. Atualmente, vários sensores a semicondutor fornecem saída de sinal digital. Estes são, geralmente, constituídos por um sensor analógico (tipo junção semicondutora), acoplado a um circuito eletrônico condicionador de sinal, que converte a variação de queda de tensão em sinais digitais. Na apresentação dos componentes utilizados neste trabalho são mostradas as características dos sensores aqui utilizados Sensores de umidade: Existem vários sensores que possibilitam a medição da umidade relativa do ar. Dois deles, bastante difundidos: a) Resistivo: Estes utilizam a propriedade de alguns materiais (certos polímeros orgânicos) de alterar sua resistência elétrica em função da umidade. Estes sensores possuem uma relação não linear entre a resistência e a umidade. Em geral, não conseguem apresentar resultados em toda a faixa de medição, a qual é de 0% a 100% de umidade relativa. b) Capacitivo: São construídos em forma de um capacitor. Duas lâminas metálicas separadas por um material isolante que forma o dielétrico. A umidade do ar afeta a constante dielétrica do material isolante, alterando a capacitância do conjunto. Um indicativo usual da umidade, quando são utilizados sensores capacitivos, é a freqüência de oscilação de um circuito, que varia em função da alteração da capacitância. Estes sensores possibilitam medição em toda a faixa (0% a 100% de umidade relativa) permitem a construção de aparelhos portáteis. Por isso, popularizaram-se a tal ponto que atualmente dominam o mercado. 35
36 Em geral, o sinal de saída desses sensores é uma tensão proporcional à umidade relativa. A Figura 4.16 mostra o sinal de saída e o aspecto físico típico de um sensor de umidade comercial. Figura 4.16: Sinal de saída do sensor de umidade HIH3610 (Honeywell) 4.7. Sensores de deslocamento de fluxo de ar: O deslocamento do fluxo de ar é medido deforma indireta. O que se mede é o efeito do deslocamento do ar sobre algum componente. Dentre as várias maneiras disponíveis no mercado tem-se: a) Mecânicos do tipo ventoinha: O sensor é uma ventoinha exposta ao fluxo de ar. Sua rotação é proporcional à velocidade do fluxo de ar. Basta, portanto, criar uma escala que relacione taxa de rotação da ventoinha com a velocidade do ar. Este sistema é muito prático para estações meteorológicas e para locais onde a velocidade do ar é suficientemente elevada para vencer o atrito dos mancais (ou rolamentos) da ventoinha; b) Térmicos: A anemometria térmica é uma técnica de medição de velocidade de fluidos que vem sendo estudada e utilizada há várias décadas. Fundamentalmente, baseia-se no princípio de que um elemento resistivo aquecido, quando submetido a um fluxo de fluido, perde calor, diminui sua temperatura e altera sua resistência elétrica. A variação da temperatura ou de sua resistência elétrica podem ser utilizadas como indicativo da velocidade do fluido a que foi submetido. O termistor (elemento geralmente utilizado como sensor) deve ser mantido a uma temperatura suficientemente elevada, de modo que a influência da temperatura ambiente não tenha efeitos significativos sobre a medição, ou deve possuir uma correção de leitura em função da temperatura ambiente. Para determinar-se a velocidade de um fluido, utilizando-se anemometria térmica, pode-se empregar duas técnicas: - mantém-se a potência entregue ao termistor constante e mede-se a sua temperatura. Neste caso, a temperatura do termistor é um indicativo da velocidade 36
37 do fluido. Assim, necessita-se de um termômetro para obter a grandeza desejada o que se constitui em um complicador para a utilização deste método. - varia-se a potência entregue ao termistor de forma a mantê-lo com temperatura constante. Neste caso, a potência entregue é um indicativo da velocidade do fluido. Caso lhe seja suprida uma corrente constante, então, pode-se utilizar a queda de tensão sobre o elemento resistivo para determinar a velocidade do fluido. Este é o método de determinação de velocidade do fluxo de ar utilizado neste trabalho. Os sensores utilizados na anemometria térmica, geralmente, são termistores com inércia térmica suficiente baixa para serem sensíveis às mínimas variações do fluxo de ar. A Figura 4.17 mostra um típico sensor do tipo termistor. Figura 4.17: Termistor 5. ATUADORES Dentro de uma malha de controle, o elemento final de controle, que tem por objetivo reposicionar uma variável, de acordo com um sinal gerado por um controlador, é chamado de atuador, pois atua diretamente no processo, modificando as suas condições. São dispositivos utilizados para conversão de sinais elétricos provenientes dos controladores, em ações requeridas pelos sistemas que estão sendo controlados. Tal procedimento pode ocorrer: - Sem necessidade de operador, - Com operador supervisionando continuamente, ou agindo em tempo real. Em geral sistemas automáticos não precisam de operador. O atuador efetua a operação para a qual foi projetado de forma totalmente automática. Do ponto de vista da energia utilizada para realizar o efeito sobre o processo, os atuadores podem ser classificados em: 37
38 - Pneumáticos: Utilizam algum gás comprimido para realizar a atuação. Em geral este gás comprimido é o próprio ar atmosférico. Este tipo de atuador é normalmente empregado em sistemas onde se requer altas velocidades nos movimentos, com pouco controle sobre o posicionamento final, em aplicações onde o torque exigido é relativamente baixo. Figura 5.1: Válvula pneumática Os atuadores pneumáticos mais conhecidos, e comumente utilizados, podem ser distribuídos por processo : Processos de Manufatura Lineares - Pistões de simples e dupla ação. Rotativos - Motores pneumáticos. Se o acionamento é bastante simples, comandado por eletroválvulas que controlam os fluxos de ar no sistema, controlando os movimentos, o controle neste tipo de atuador se restringe ao comando destas válvulas e seu acionamento requer apenas drives para estes reles. As principais características deste tipo de acionamento são o baixo peso e a baixa manutenção. Processos Contínuos Em processos contínuos, a válvula de controle é um atuador capaz de regular a vazão de um fluído (líquido, gás ou vapor) que escoa através de uma tubulação, por meio do posicionamento relativo de um obturador que obstrui a área livre de passagem do fluído. Nestas válvulas a atuação é feita, na maioria das vezes, por dispositivos pneumáticos, por isto são chamadas também de válvulas de controle pneumáticas. - Hidráulicos: Utilizam fluido líquido para realizar a atuação. Este fluido pode de água, óleo mineral, etc. Ex: Pistões hidráulicos, válvulas hidráulicas, etc. São utilizados principalmente em sistemas onde são requeridos elevados torques, sobretudo no acionamento de máquinas de grande porte e em robôs de alta velocidade de posicionamento. Assim como no caso dos atuadores pneumáticos, estes podem ser lineares (pistão simples ou dupla ação) ou rotativos (motores hidráulicos). Seu acionamento, assim como no caso dos pneumáticos, é bastante simples, comandado por eletroválvulas que controlam os fluxos de óleo do sistema, controlando os movimentos. O controle neste tipo de atuador se restringe ao comando destas válvulas e seu acionamento requer apenas circuitos de controle (drives) para estes reles. Características Alto torque desenvolvido; 38
39 Alta relação torque/peso; Alta performance; Baixa manutenção. Figura 5.2: Vista em corte de um cilindro hidráulico Atuadores Elétricos Este tipo de atuador é o mais empregado em aplicações industriais de uma forma geral. As facilidades de instalação, os baixos custos de instalação e o desenvolvimento de drives eletrônicos para seu acionamento fizeram deste tipo de atuador o mais popular, não apenas em uso industrial, mas também para uso geral. Aplicações Bombas; Válvulas de controle (atuador elétrico); Eixos de máquinas ferramenta; Articulações de Robôs; Esteiras; Damper ou abafador de caldeiras; etc. Tipos de atuadores elétricos Motor de passo Devido à simplicidade do acionamento admitido por este tipo de motor, foi o acionamento mais utilizado para controle de posicionamento em máquinas-ferramenta, até o final da década de 70. Atualmente eles estão caindo em desuso devido à redução dos custos e das dificuldades de acionamento dos demais tipos de motores. Suas características gerais são: Baixo Torque; Acionamento simples; 39
40 Baixa relação peso/potência. Mesmo com algumas características não muito favoráveis, foi muito utilizado, pois a simplicidade do controle de seu acionamento compensavam suas limitações. São comumente utilizados, hoje, em sistemas que operam e malha aberta, não exigindo a presença de sensores ou controladores mais elaborados. Sua maior aplicação está em periféricos para informática. 40
41 Figura 5.3: Especificações técnicas de um motor de passo Motor de corrente contínua O desenvolvimento da microeletrônica e da eletrônica de potência viabilizou o acionamento de outros tipos de motores elétricos além dos motores de passo. Tendo um desempenho muito superior ao motor de passo, o motor CC o substituiu em algumas aplicações, pois seu acionamento e controle também são bastante simples. 41
42 42
43 Figura 5.4: Especificações técnicas de um motor de corrente contínua Motor de corrente alternada síncrono As inovações construtivas destes motores possibilitaram a sua utilização em acionamentos que até então eram desenvolvidos para motores CC. Estas inovações também determinaram o barateamento e o aumento de eficiência dos acionamentos aplicados a este tipo de motor. 43
44 44
45 Figura 5.5: Especificações técnicas de um motor síncrono Motor de corrente alternada assíncrono (de indução) Este tipo de motor é largamente utilizado em acionamentos onde controles de velocidade e posicionamento não são requeridos, devido ao seu baixo custo e robustez. O desenvolvimento de novas técnicas e dispositivos para acionamento destes motores, abrem uma perspectiva para sua utilização também em acionamentos de máquinas-ferramenta, como também em qualquer sistema de controle de posicionamento ou velocidade. Atualmente a maioria dos equipamentos de comando numérico se utilizam de motores CA acionados pelos chamados inversores de freqüência. 45
Introdução. Criar um sistema capaz de interagir com o ambiente. Um transdutor é um componente que transforma um tipo de energia em outro.
 SENSORES Introdução Criar um sistema capaz de interagir com o ambiente. Num circuito eletrônico o sensor é o componente que sente diretamente alguma característica física do meio em que esta inserido,
SENSORES Introdução Criar um sistema capaz de interagir com o ambiente. Num circuito eletrônico o sensor é o componente que sente diretamente alguma característica física do meio em que esta inserido,
Automação industrial Sensores
 Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Comandos Eletro-eletrônicos SENSORES
 Comandos Eletro-eletrônicos SENSORES Prof. Roberto Leal Sensores Dispositivo capaz de detectar sinais ou de receber estímulos de natureza física (tais como calor, pressão, vibração, velocidade, etc.),
Comandos Eletro-eletrônicos SENSORES Prof. Roberto Leal Sensores Dispositivo capaz de detectar sinais ou de receber estímulos de natureza física (tais como calor, pressão, vibração, velocidade, etc.),
SENSORES DISCIPLINA DE MATERIAIS ELÉTRICOS. ALUNOS: André Sato Érico Noé Leandro Percebon
 SENSORES DISCIPLINA DE MATERIAIS ELÉTRICOS ALUNOS: André Sato Érico Noé Leandro Percebon Indrodução SENSORES são dispositivos que mudam seu comportamento sob a ação de uma grandeza física, podendo fornecer
SENSORES DISCIPLINA DE MATERIAIS ELÉTRICOS ALUNOS: André Sato Érico Noé Leandro Percebon Indrodução SENSORES são dispositivos que mudam seu comportamento sob a ação de uma grandeza física, podendo fornecer
LEI DE OHM. Professor João Luiz Cesarino Ferreira. Conceitos fundamentais
 LEI DE OHM Conceitos fundamentais Ao adquirir energia cinética suficiente, um elétron se transforma em um elétron livre e se desloca até colidir com um átomo. Com a colisão, ele perde parte ou toda energia
LEI DE OHM Conceitos fundamentais Ao adquirir energia cinética suficiente, um elétron se transforma em um elétron livre e se desloca até colidir com um átomo. Com a colisão, ele perde parte ou toda energia
Técnico em Eletrotécnica
 Técnico em Eletrotécnica Caderno de Questões Prova Objetiva 2015 01 Em uma corrente elétrica, o deslocamento dos elétrons para produzir a corrente se deve ao seguinte fator: a) fluxo dos elétrons b) forças
Técnico em Eletrotécnica Caderno de Questões Prova Objetiva 2015 01 Em uma corrente elétrica, o deslocamento dos elétrons para produzir a corrente se deve ao seguinte fator: a) fluxo dos elétrons b) forças
Distância de acionamento. Distância sensora nominal (Sn) Distância sensora efetiva (Su) Distância sensora real (Sr) 15/03/2015
 Distância sensora efetiva (Su) Distância sensora real (Sr) 15/03/2015") Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Sensores São dispositivos que
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Sensores São dispositivos que
. linear ou rotativo. analógico ou digital. absoluto, incremental ou incremental-absoluto. princípio de operação
 8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
MOTORES ELÉTRICOS Princípios e fundamentos
 MOTORES ELÉTRICOS Princípios e fundamentos 1 Classificação 2 3 Estator O estator do motor e também constituido por um núcleo ferromagnético laminado, nas cavas do qual são colocados os enrolamentos alimentados
MOTORES ELÉTRICOS Princípios e fundamentos 1 Classificação 2 3 Estator O estator do motor e também constituido por um núcleo ferromagnético laminado, nas cavas do qual são colocados os enrolamentos alimentados
Aula V Medição de Variáveis Mecânicas
 Aula V Medição de Variáveis Mecânicas Universidade Federal da Bahia Escola Politécnica Disciplina: Instrumentação e Automação Industrial I(ENGF99) Professor: Eduardo Simas(eduardo.simas@ufba.br) Sensores
Aula V Medição de Variáveis Mecânicas Universidade Federal da Bahia Escola Politécnica Disciplina: Instrumentação e Automação Industrial I(ENGF99) Professor: Eduardo Simas(eduardo.simas@ufba.br) Sensores
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÃO ELETRÔNICA PROFESSOR: LUCIANO CAVALCANTI SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÃO ELETRÔNICA PROFESSOR: LUCIANO CAVALCANTI SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
SENSORES INDUTIVOS E CAPACITIVOS. Instrumentação - Profs. Isaac Silva - Filipi Viana - Felipe Dalla Vecchia 2013
 INSTRUMENTAÇÃO SENSORES INDUTIVOS E CAPACITIVOS Jocarli Alencastro Instrumentação - Profs. Isaac Silva - Filipi Viana - Felipe Dalla Vecchia 2013 Introdução Os sensores indutivos e capacitivos foram desenvolvidos
INSTRUMENTAÇÃO SENSORES INDUTIVOS E CAPACITIVOS Jocarli Alencastro Instrumentação - Profs. Isaac Silva - Filipi Viana - Felipe Dalla Vecchia 2013 Introdução Os sensores indutivos e capacitivos foram desenvolvidos
Sensores. unesp. Prof. Marcelo Wendling 2010 Versão 2.0 UNIVERSIDADE ESTADUAL PAULISTA
 unesp UNIVERSIDADE ESTADUAL PAULISTA Campus de Guaratinguetá Colégio Técnico Industrial de Guaratinguetá Professor Carlos Augusto Patrício Amorim Sensores Prof. Marcelo Wendling 2010 Versão 2.0 2 Índice
unesp UNIVERSIDADE ESTADUAL PAULISTA Campus de Guaratinguetá Colégio Técnico Industrial de Guaratinguetá Professor Carlos Augusto Patrício Amorim Sensores Prof. Marcelo Wendling 2010 Versão 2.0 2 Índice
Fundamentos de Automação. Sensores 17/03/2015. Sensores. Sensores Analógicos e Sensores Digitais. Sensores Analógicos e Sensores Digitais
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Sensores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Sensores
CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES
 CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 1 a QUESTÃO Valor: 1,00 A L 0 H mola apoio sem atrito B A figura acima mostra um sistema composto por uma parede vertical
CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 1 a QUESTÃO Valor: 1,00 A L 0 H mola apoio sem atrito B A figura acima mostra um sistema composto por uma parede vertical
Sensores e Atuadores (2)
") (2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
(2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
Como funciona o motor de corrente contínua
 Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Motores de Indução ADRIELLE DE CARVALHO SANTANA
 ADRIELLE DE CARVALHO SANTANA Motores CA Os motores CA são classificados em: -> Motores Síncronos; -> Motores Assíncronos (Motor de Indução) O motor de indução é o motor CA mais usado, por causa de sua
ADRIELLE DE CARVALHO SANTANA Motores CA Os motores CA são classificados em: -> Motores Síncronos; -> Motores Assíncronos (Motor de Indução) O motor de indução é o motor CA mais usado, por causa de sua
Controle universal para motor de passo
 Controle universal para motor de passo No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo
Controle universal para motor de passo No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo
Como funciona o Reed-Switches (MEC089)
") Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
Sensores. Sensor. Passivos: Chave Potenciômetro Energia Auxiliar. Ativos: Célula Fotoelétrica Cristal Piezoelétrico. Digitais: Encoder Régua Óptica
 Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Universidade Federal da Paraíba Centro de Ciências Exatas e da Natureza Departamento de Informática
 Universidade Federal da Paraíba Centro de Ciências Exatas e da Natureza Departamento de Informática Francisco Erberto de Sousa 11111971 Saulo Bezerra Alves - 11111958 Relatório: Capacitor, Resistor, Diodo
Universidade Federal da Paraíba Centro de Ciências Exatas e da Natureza Departamento de Informática Francisco Erberto de Sousa 11111971 Saulo Bezerra Alves - 11111958 Relatório: Capacitor, Resistor, Diodo
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA Introdução O uso de termômetros de resistência esta se difundindo rapidamente devido a sua precisão e simplicidade
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA Introdução O uso de termômetros de resistência esta se difundindo rapidamente devido a sua precisão e simplicidade
Laboratório de Conversão Eletromecânica de Energia B
 Laboratório de Conversão Eletromecânica de Energia B Prof a. Katia C. de Almeida 1 Obtenção Experimental dos Parâmetros do Circuito Equivalente do Motor de Indução Monofásico 1.1 Introdução 1.1.1 Motores
Laboratório de Conversão Eletromecânica de Energia B Prof a. Katia C. de Almeida 1 Obtenção Experimental dos Parâmetros do Circuito Equivalente do Motor de Indução Monofásico 1.1 Introdução 1.1.1 Motores
OBJETIVOS: CARGA HORÁRIA MÍNIMA CRONOGRAMA:
 ESTUDO DIRIGIDO COMPONENTE CURRICULAR: Controle de Processos e Instrumentação PROFESSOR: Dorival Rosa Brito ESTUDO DIRIGIDO: Métodos de Determinação de Parâmetros de Processos APRESENTAÇÃO: O rápido desenvolvimento
ESTUDO DIRIGIDO COMPONENTE CURRICULAR: Controle de Processos e Instrumentação PROFESSOR: Dorival Rosa Brito ESTUDO DIRIGIDO: Métodos de Determinação de Parâmetros de Processos APRESENTAÇÃO: O rápido desenvolvimento
Geradores de Corrente Contínua UNIDADE 2 Prof. Adrielle de Carvalho Santana
 Geradores de Corrente Contínua UNIDADE 2 Prof. Adrielle de Carvalho Santana INTRODUÇÃO Um gerador de corrente continua é uma máquina elétrica capaz de converter energia mecânica em energia elétrica. Também
Geradores de Corrente Contínua UNIDADE 2 Prof. Adrielle de Carvalho Santana INTRODUÇÃO Um gerador de corrente continua é uma máquina elétrica capaz de converter energia mecânica em energia elétrica. Também
Capítulo 11 MOTORES ELÉTRICOS DE CORRENTE CONTÍNUA E UNIVERSAL. Introdução
 Capítulo 11 MOTORES ELÉTRICOS DE CORRENTE CONTÍNUA E UNIVERSAL Esta aula apresenta o princípio de funcionamento dos motores elétricos de corrente contínua, o papel do comutador, as características e relações
Capítulo 11 MOTORES ELÉTRICOS DE CORRENTE CONTÍNUA E UNIVERSAL Esta aula apresenta o princípio de funcionamento dos motores elétricos de corrente contínua, o papel do comutador, as características e relações
Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA.
 Motores elétricos Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA. Para melhor entender o funcionamento desse
Motores elétricos Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA. Para melhor entender o funcionamento desse
Estabilizada de. PdP. Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006
 TUTORIAL Fonte Estabilizada de 5 Volts Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Fonte Estabilizada de 5 Volts Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
Sensores e Atuadores (1)
") (1) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Introdução Sensores Fornecem parâmetros sobre o comportamento do manipulador, geralmente em termos de posição e velocidade
(1) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Introdução Sensores Fornecem parâmetros sobre o comportamento do manipulador, geralmente em termos de posição e velocidade
SENSORES INDUSTRIAIS
 SENSORES INDUSTRIAIS Sensores: são dispositivos que transformam grandezas físicas em um sinal Sensores Analógicos e Digitais Caracterís:cas Alcance Precisão Resolução Sensibilidade Tempo de Resposta Não
SENSORES INDUSTRIAIS Sensores: são dispositivos que transformam grandezas físicas em um sinal Sensores Analógicos e Digitais Caracterís:cas Alcance Precisão Resolução Sensibilidade Tempo de Resposta Não
Experiência 06 Resistores e Propriedades dos Semicondutores
 Universidade Federal de Santa Catarina Departamento de Engenharia Elétrica Laboratório de Materiais Elétricos EEL 7051 Professor Clóvis Antônio Petry Experiência 06 Resistores e Propriedades dos Semicondutores
Universidade Federal de Santa Catarina Departamento de Engenharia Elétrica Laboratório de Materiais Elétricos EEL 7051 Professor Clóvis Antônio Petry Experiência 06 Resistores e Propriedades dos Semicondutores
Eletrônica Industrial Apostila sobre Modulação PWM página 1 de 6 INTRODUÇÃO
 Eletrônica Industrial Apostila sobre Modulação PWM página 1 de 6 Curso Técnico em Eletrônica Eletrônica Industrial Apostila sobre Modulação PWM Prof. Ariovaldo Ghirardello INTRODUÇÃO Os controles de potência,
Eletrônica Industrial Apostila sobre Modulação PWM página 1 de 6 Curso Técnico em Eletrônica Eletrônica Industrial Apostila sobre Modulação PWM Prof. Ariovaldo Ghirardello INTRODUÇÃO Os controles de potência,
Alternadores e Circuitos Polifásicos ADRIELLE DE CARVALHO SANTANA
 Alternadores e Circuitos Polifásicos ADRIELLE DE CARVALHO SANTANA Alternadores Um gerador é qualquer máquina que transforma energia mecânica em elétrica por meio da indução magnética. Um gerador de corrente
Alternadores e Circuitos Polifásicos ADRIELLE DE CARVALHO SANTANA Alternadores Um gerador é qualquer máquina que transforma energia mecânica em elétrica por meio da indução magnética. Um gerador de corrente
Automação Industrial Parte 5
 Automação Industrial Parte 5 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Sensores capacitivos -Sensores de proximidade capacitivos estão disponíveis em formas e tamanhos
Automação Industrial Parte 5 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Sensores capacitivos -Sensores de proximidade capacitivos estão disponíveis em formas e tamanhos
http://www.sabereletronica.com.br/secoes/leitura/1569/imprimir:yes Imprimir
 1 de 12 28/02/2011 16:11 Imprimir PRODUTOS / Sensores 05/04/2010 16:50:05 Curso sobre Sensores Veja na primeira parte deste artigo a abordagem dos principais sensores utilizados na indústria, e como eles
1 de 12 28/02/2011 16:11 Imprimir PRODUTOS / Sensores 05/04/2010 16:50:05 Curso sobre Sensores Veja na primeira parte deste artigo a abordagem dos principais sensores utilizados na indústria, e como eles
Sensores Ultrasônicos
 Sensores Ultrasônicos Introdução A maioria dos transdutores de ultra-som utiliza materiais piezelétricos para converter energia elétrica em mecânica e vice-versa. Um transdutor de Ultra-som é basicamente
Sensores Ultrasônicos Introdução A maioria dos transdutores de ultra-som utiliza materiais piezelétricos para converter energia elétrica em mecânica e vice-versa. Um transdutor de Ultra-som é basicamente
Engenharia de Controle: Sensores. P rof. M sc. M arcelo A. de O liveira
 Engenharia de Controle: Sensores P rof. M sc. M arcelo A. de O liveira 1) Defina sensor, transdutor e transmissor. 2) Mostre as diferenças entre sensores digitais e analógicos. 3) Explique o funcionamento
Engenharia de Controle: Sensores P rof. M sc. M arcelo A. de O liveira 1) Defina sensor, transdutor e transmissor. 2) Mostre as diferenças entre sensores digitais e analógicos. 3) Explique o funcionamento
Os encoders ópticos convertem deslocamentos angulares em uma sequência de pulsos digitais, contando com um só bit ou decodificando um conjunto deles,
 Encoders ópticos O que é: Os encoders ópticos convertem deslocamentos angulares em uma sequência de pulsos digitais, contando com um só bit ou decodificando um conjunto deles, os pulsos podem ser convertidos
Encoders ópticos O que é: Os encoders ópticos convertem deslocamentos angulares em uma sequência de pulsos digitais, contando com um só bit ou decodificando um conjunto deles, os pulsos podem ser convertidos
Prof. Antonio Carlos Santos. Aula 7: Polarização de Transistores
 IF-UFRJ Elementos de Eletrônica Analógica Prof. Antonio Carlos Santos Mestrado Profissional em Ensino de Física Aula 7: Polarização de Transistores Este material foi baseado em livros e manuais existentes
IF-UFRJ Elementos de Eletrônica Analógica Prof. Antonio Carlos Santos Mestrado Profissional em Ensino de Física Aula 7: Polarização de Transistores Este material foi baseado em livros e manuais existentes
Escola de Educação Profissional SENAI Visconde de Mauá
 Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Novembro de 2014 Revisão: A Prof Vander Campos Conhecer os principais conceitos e aplicações dos Servoacionamentos;
Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Novembro de 2014 Revisão: A Prof Vander Campos Conhecer os principais conceitos e aplicações dos Servoacionamentos;
GERADORES MECÂNICOS DE ENERGIA ELÉTRICA
 GERADORES MECÂNICOS DE ENERGIA ELÉTRICA Todo dispositivo cuja finalidade é produzir energia elétrica à custa de energia mecânica constitui uma máquina geradora de energia elétrica. O funcionamento do
GERADORES MECÂNICOS DE ENERGIA ELÉTRICA Todo dispositivo cuja finalidade é produzir energia elétrica à custa de energia mecânica constitui uma máquina geradora de energia elétrica. O funcionamento do
Procure pensar em outros exemplos da nossa vida em que os sensores estão presentes.
 Sensores Fabrício Ramos da Fonseca Introdução aos Sensores Nas plantas automatizadas os sensores são elementos muito importantes. Na nossa vida cotidiana, os sensores estão presentes em várias situações,
Sensores Fabrício Ramos da Fonseca Introdução aos Sensores Nas plantas automatizadas os sensores são elementos muito importantes. Na nossa vida cotidiana, os sensores estão presentes em várias situações,
Motores Síncronos ADRIELLE C SANTANA
 Motores Síncronos ADRIELLE C SANTANA Motores Síncronos Possuem velocidade fixa e são utilizados para grandes cargas, (em função do seu alto custo que faz com que ele não seja viável para aparelhos menores)
Motores Síncronos ADRIELLE C SANTANA Motores Síncronos Possuem velocidade fixa e são utilizados para grandes cargas, (em função do seu alto custo que faz com que ele não seja viável para aparelhos menores)
Quando comparado com uma chave mecânica, uma chave eletrônica apresenta vantagens e desvantagens.
 Chave eletrônica Introdução O transistor, em sua aplicação mais simples, é usado como uma chave eletrônica, ou seja, pode ser usado para acionar cargas elétricas. A principal diferença entre o transistor
Chave eletrônica Introdução O transistor, em sua aplicação mais simples, é usado como uma chave eletrônica, ou seja, pode ser usado para acionar cargas elétricas. A principal diferença entre o transistor
DIODO SEMICONDUTOR. Conceitos Básicos. Prof. Marcelo Wendling Ago/2011
 DIODO SEMICONDUTOR Prof. Marcelo Wendling Ago/2011 Conceitos Básicos O diodo semicondutor é um componente que pode comportar-se como condutor ou isolante elétrico, dependendo da forma como a tensão é aplicada
DIODO SEMICONDUTOR Prof. Marcelo Wendling Ago/2011 Conceitos Básicos O diodo semicondutor é um componente que pode comportar-se como condutor ou isolante elétrico, dependendo da forma como a tensão é aplicada
CENTRO TECNOLÓGICO ESTADUAL PAROBÉ CURSO DE ELETRÔNICA
 CENTRO TECNOLÓGO ESTADUAL PAROBÉ CURSO DE ELETRÔNA LABORATÓRIO DE ELETRÔNA ANALÓGA I Prática: 6 Assunto: Transistor Bipolar 1 Objetivos: Testar as junções e identificar o tipo de um transistor com o multímetro.
CENTRO TECNOLÓGO ESTADUAL PAROBÉ CURSO DE ELETRÔNA LABORATÓRIO DE ELETRÔNA ANALÓGA I Prática: 6 Assunto: Transistor Bipolar 1 Objetivos: Testar as junções e identificar o tipo de um transistor com o multímetro.
dv dt Fig.19 Pulso de tensão típico nos terminais do motor
 INFLUÊNCIA DO INVERSOR NO SISTEMA DE ISOLAMENTO DO MOTOR Os inversores de freqüência modernos utilizam transistores (atualmente IGBTs) de potência cujos os chaveamentos (khz) são muito elevados. Para atingirem
INFLUÊNCIA DO INVERSOR NO SISTEMA DE ISOLAMENTO DO MOTOR Os inversores de freqüência modernos utilizam transistores (atualmente IGBTs) de potência cujos os chaveamentos (khz) são muito elevados. Para atingirem
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA)
") ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006. PdP. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
Manutenção Elétrica. Entre os elementos de processamento de sinais podemos citar:
 Manutenção Elétrica Elementos de Processamento de Sinais Os componentes de processamento de sinais elétricos são aqueles que analisam as informações emitidas ao circuito pelos elementos de entrada, combinando-as
Manutenção Elétrica Elementos de Processamento de Sinais Os componentes de processamento de sinais elétricos são aqueles que analisam as informações emitidas ao circuito pelos elementos de entrada, combinando-as
ENCODERS. Fig 1 - Princípio de funcionamento de um encoder rotativo.
 ENCODERS Este é sem dúvida nenhuma um dos equipamentos mais usados em Automação Industrial e Mecatrônica, pois com ele conseguimos converter movimentos angulares e lineares em informações úteis à nossa
ENCODERS Este é sem dúvida nenhuma um dos equipamentos mais usados em Automação Industrial e Mecatrônica, pois com ele conseguimos converter movimentos angulares e lineares em informações úteis à nossa
Automação Industrial AULA 04: Sensores e atuadores OBJETIVO: Apresentar os sensores e atuadores mais utilizados nos projetos de automação..
 AULA 04: Sensores e atuadores OBJETIVO: Apresentar os sensores e atuadores mais utilizados nos projetos de automação.. A pirâmide de automação Nível 5: Gerenciamento corporativo Nível 3: Nível 2: Nível
AULA 04: Sensores e atuadores OBJETIVO: Apresentar os sensores e atuadores mais utilizados nos projetos de automação.. A pirâmide de automação Nível 5: Gerenciamento corporativo Nível 3: Nível 2: Nível
Luis Filipe Baptista MEMM 2
 INSTRUMENTAÇÃO E CONTROLO CAPÍTULO V Transdutores Optoelectrónicos 2012/2013 Índice do capítulo Introdução Transdutores ópticos Transdutores optoelectrónicos - Absolutos - Incrementais Aplicações industriais
INSTRUMENTAÇÃO E CONTROLO CAPÍTULO V Transdutores Optoelectrónicos 2012/2013 Índice do capítulo Introdução Transdutores ópticos Transdutores optoelectrónicos - Absolutos - Incrementais Aplicações industriais
Eletrotécnica. Comandos Elétricos
 Eletrotécnica Comandos Elétricos Teoria e Aplicações Escola Técnica de Brasília - ETB Prof. Roberto Leal Ligação de Motores 1 Motor Elétrico Transformar energia elétrica em energia mecânica Motores de
Eletrotécnica Comandos Elétricos Teoria e Aplicações Escola Técnica de Brasília - ETB Prof. Roberto Leal Ligação de Motores 1 Motor Elétrico Transformar energia elétrica em energia mecânica Motores de
materiais ou produtos,sem prejudicar a posterior utilização destes, contribuindo para o incremento da
 Definição De acordo com a Associação Brasileira de Ensaios Não Destrutivos, ABENDE, os Ensaios Não Destrutivos (END) são definidos como: Técnicas utilizadas no controle da qualidade, d de materiais ou
Definição De acordo com a Associação Brasileira de Ensaios Não Destrutivos, ABENDE, os Ensaios Não Destrutivos (END) são definidos como: Técnicas utilizadas no controle da qualidade, d de materiais ou
Capítulo 02. Resistores. 1. Conceito. 2. Resistência Elétrica
 1. Conceito Resistor é todo dispositivo elétrico que transforma exclusivamente energia elétrica em energia térmica. Simbolicamente é representado por: Assim, podemos classificar: 1. Condutor ideal Os portadores
1. Conceito Resistor é todo dispositivo elétrico que transforma exclusivamente energia elétrica em energia térmica. Simbolicamente é representado por: Assim, podemos classificar: 1. Condutor ideal Os portadores
Universidade Federal do Rio de Janeiro. Princípios de Instrumentação Biomédica. Módulo 4
 Universidade Federal do Rio de Janeiro Princípios de Instrumentação Biomédica Módulo 4 Faraday Lenz Henry Weber Maxwell Oersted Conteúdo 4 - Capacitores e Indutores...1 4.1 - Capacitores...1 4.2 - Capacitor
Universidade Federal do Rio de Janeiro Princípios de Instrumentação Biomédica Módulo 4 Faraday Lenz Henry Weber Maxwell Oersted Conteúdo 4 - Capacitores e Indutores...1 4.1 - Capacitores...1 4.2 - Capacitor
Strain Gages e Pontes de Wheatstone. Disciplina de Instrumentação e Medição Prof. Felipe Dalla Vecchia e Filipi Vianna
 Strain Gages e Pontes de Wheatstone Disciplina de Instrumentação e Medição Prof. Felipe Dalla Vecchia e Filipi Vianna Referência Aula baseada no material dos livros: - Instrumentação e Fundamentos de Medidas
Strain Gages e Pontes de Wheatstone Disciplina de Instrumentação e Medição Prof. Felipe Dalla Vecchia e Filipi Vianna Referência Aula baseada no material dos livros: - Instrumentação e Fundamentos de Medidas
São componentes formados por espiras de fio esmaltado numa forma dentro da qual pode ou não existir um núcleo de material ferroso.
 Luciano de Abreu São componentes formados por espiras de fio esmaltado numa forma dentro da qual pode ou não existir um núcleo de material ferroso. É um dispositivo elétrico passivo que armazena energia
Luciano de Abreu São componentes formados por espiras de fio esmaltado numa forma dentro da qual pode ou não existir um núcleo de material ferroso. É um dispositivo elétrico passivo que armazena energia
Capítulo 1: Eletricidade. Corrente continua: (CC ou, em inglês, DC - direct current), também chamada de
, também chamada de") Capítulo 1: Eletricidade É um fenômeno físico originado por cargas elétricas estáticas ou em movimento e por sua interação. Quando uma carga encontra-se em repouso, produz força sobre outras situadas em
Capítulo 1: Eletricidade É um fenômeno físico originado por cargas elétricas estáticas ou em movimento e por sua interação. Quando uma carga encontra-se em repouso, produz força sobre outras situadas em
Teoria Princípio do Capacitor
 Teoria Princípio do Capacitor Um capacitor consiste de dois pratos eletrodos isolados de cada lado por um dielétrico médio. As características de um capacitor são dependentes da capacitância e da tensão.
Teoria Princípio do Capacitor Um capacitor consiste de dois pratos eletrodos isolados de cada lado por um dielétrico médio. As características de um capacitor são dependentes da capacitância e da tensão.
TÍTULO: UTILIZAÇÃO DE SENSORES PARA UMA SELADORA AUTOMATICA DE TABULEIROS DE DAMAS
 Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: UTILIZAÇÃO DE SENSORES PARA UMA SELADORA AUTOMATICA DE TABULEIROS DE DAMAS CATEGORIA: CONCLUÍDO
Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: UTILIZAÇÃO DE SENSORES PARA UMA SELADORA AUTOMATICA DE TABULEIROS DE DAMAS CATEGORIA: CONCLUÍDO
Sensores Digitais. Prof. Ms. Marco Antonio Baptista de Sousa
 Sensores Digitais Prof. Ms. Marco Antonio Baptista de Sousa Apresentação Em função dos novos métodos de fabricação, onde sofisticados comando de processos de automação e robotização de máquinas industriais
Sensores Digitais Prof. Ms. Marco Antonio Baptista de Sousa Apresentação Em função dos novos métodos de fabricação, onde sofisticados comando de processos de automação e robotização de máquinas industriais
Geração, Transmissão e Distribuição de Energia Elétrica
 Geração, Transmissão e Distribuição de Energia Elétrica Existem diversas maneiras de se gerar energia elétrica. No mundo todo, as três formas mais comuns são por queda d água (hidroelétrica), pela queima
Geração, Transmissão e Distribuição de Energia Elétrica Existem diversas maneiras de se gerar energia elétrica. No mundo todo, as três formas mais comuns são por queda d água (hidroelétrica), pela queima
Funções de Posicionamento para Controle de Eixos
 Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
CONTROLE DIGITAL DE VOLUME 1.-----------------------------------------------------------------------------
 CONTROLE DIGITAL DE VOLUME 1.----------------------------------------------------------------------------- Uma boa gama de aplicações atuais utiliza o controle de volume digital. Não nos referimos apenas
CONTROLE DIGITAL DE VOLUME 1.----------------------------------------------------------------------------- Uma boa gama de aplicações atuais utiliza o controle de volume digital. Não nos referimos apenas
Transformador. Índice. Estrutura
 Transformador Origem: Wikipédia, a enciclopédia livre. Um transformador ou trafo é um dispositivo destinado a transmitir energia elétrica ou potência elétrica de um circuito a outro, transformando tensões,
Transformador Origem: Wikipédia, a enciclopédia livre. Um transformador ou trafo é um dispositivo destinado a transmitir energia elétrica ou potência elétrica de um circuito a outro, transformando tensões,
-Transformadores Corrente de energização - inrush
 -Transformadores Corrente de energização - inrush Definição Corrente de magnetização (corrente de inrush) durante a energização do transformador Estas correntes aparecem durante a energização do transformador,
-Transformadores Corrente de energização - inrush Definição Corrente de magnetização (corrente de inrush) durante a energização do transformador Estas correntes aparecem durante a energização do transformador,
Sensores e atuadores (continuação)
") AULA 05: Sensores e atuadores (continuação) OBJETIVO: Apresentar os sensores e atuadores mais utilizados nos projetos de automação.. A pirâmide de automação Nível 5: Gerenciamento corporativo Nível 3:
AULA 05: Sensores e atuadores (continuação) OBJETIVO: Apresentar os sensores e atuadores mais utilizados nos projetos de automação.. A pirâmide de automação Nível 5: Gerenciamento corporativo Nível 3:
Energia Eólica. História
 Energia Eólica História Com o avanço da agricultura, o homem necessitava cada vez mais de ferramentas que o auxiliassem nas diversas etapas do trabalho. Isso levou ao desenvolvimento de uma forma primitiva
Energia Eólica História Com o avanço da agricultura, o homem necessitava cada vez mais de ferramentas que o auxiliassem nas diversas etapas do trabalho. Isso levou ao desenvolvimento de uma forma primitiva
Revisão. Gerador Síncrono Tensão induzida no enrolamento do estator
 Revisão Gerador Síncrono Tensão induzida no enrolamento do estator Revisão Motor de Indução Geração do campo girante do estator Revisão Motor de Indução Velocidade de rotação do campo girante do estator
Revisão Gerador Síncrono Tensão induzida no enrolamento do estator Revisão Motor de Indução Geração do campo girante do estator Revisão Motor de Indução Velocidade de rotação do campo girante do estator
S O IC N Â C E etro) M O TR C (taquím LE E S étrico TO N E M A o taquim C C V o Transdutores Transdutores de velocidade: dínam E E T D IP
 M O TR C (taquím LE E S étrico TO N E M A o taquim C C V o Transdutores Transdutores de velocidade: dínam E E T D IP") Accionamentos Electromecânicos / Selecção de Conversores Carlos Ferreira 1 Para fechar a malha é necessária a utilização de transdutores das variáveis. Conforme a grandeza a controlar assim é o transdutor
Accionamentos Electromecânicos / Selecção de Conversores Carlos Ferreira 1 Para fechar a malha é necessária a utilização de transdutores das variáveis. Conforme a grandeza a controlar assim é o transdutor
Boletim Te cnico. Tema: BT002 Fontes para lâmpadas UV
 Boletim Te cnico Tema: BT002 Fontes para lâmpadas UV As fontes para lâmpadas ultravioleta são os circuitos de potência responsáveis pela alimentação das lâmpadas de média pressão. São também conhecidas
Boletim Te cnico Tema: BT002 Fontes para lâmpadas UV As fontes para lâmpadas ultravioleta são os circuitos de potência responsáveis pela alimentação das lâmpadas de média pressão. São também conhecidas
REVISÃO ENEM. Prof. Heveraldo
 REVISÃO ENEM Prof. Heveraldo Fenômenos Elétricos e Magnéticos Carga elétrica e corrente elétrica. Lei de Coulomb. Campo elétrico e potencial elétrico. Linhas de campo. Superfícies equipotenciais. Poder
REVISÃO ENEM Prof. Heveraldo Fenômenos Elétricos e Magnéticos Carga elétrica e corrente elétrica. Lei de Coulomb. Campo elétrico e potencial elétrico. Linhas de campo. Superfícies equipotenciais. Poder
1 Problemas de transmissão
 1 Problemas de transmissão O sinal recebido pelo receptor pode diferir do sinal transmitido. No caso analógico há degradação da qualidade do sinal. No caso digital ocorrem erros de bit. Essas diferenças
1 Problemas de transmissão O sinal recebido pelo receptor pode diferir do sinal transmitido. No caso analógico há degradação da qualidade do sinal. No caso digital ocorrem erros de bit. Essas diferenças
UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL
 UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL Física Experimental III - Medidas Elétricas Objetivo O objetivo desta prática é aprender a fazer medições de resistência, tensão
UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL Física Experimental III - Medidas Elétricas Objetivo O objetivo desta prática é aprender a fazer medições de resistência, tensão
Questão 1. Questão 2. Resposta. Resposta
 Questão 1 Na natureza, muitos animais conseguem guiar-se e até mesmo caçar com eficiência, devido à grande sensibilidade que apresentam para a detecção de ondas, tanto eletromagnéticas quanto mecânicas.
Questão 1 Na natureza, muitos animais conseguem guiar-se e até mesmo caçar com eficiência, devido à grande sensibilidade que apresentam para a detecção de ondas, tanto eletromagnéticas quanto mecânicas.
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial Jhonathan Junio de Souza Motores de Passo Trabalho apresentado à disciplina
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial Jhonathan Junio de Souza Motores de Passo Trabalho apresentado à disciplina
AULA 02 REVISÃO DE EQUIPAMENTOS ELÉTRICOS TRANSFORMADORES DE MEDIDAS DISJUNTORES DE POTÊNCIA
 AULA 02 REVISÃO DE EQUIPAMENTOS ELÉTRICOS TRANSFORMADORES DE MEDIDAS DISJUNTORES DE POTÊNCIA ENE095 Proteção de Sistemas Elétricos de Potência Prof. Luís Henrique Lopes Lima 1 TRANSFORMADORES DE MEDIDAS
AULA 02 REVISÃO DE EQUIPAMENTOS ELÉTRICOS TRANSFORMADORES DE MEDIDAS DISJUNTORES DE POTÊNCIA ENE095 Proteção de Sistemas Elétricos de Potência Prof. Luís Henrique Lopes Lima 1 TRANSFORMADORES DE MEDIDAS
grandeza do número de elétrons de condução que atravessam uma seção transversal do fio em segundos na forma, qual o valor de?
 Física 01. Um fio metálico e cilíndrico é percorrido por uma corrente elétrica constante de. Considere o módulo da carga do elétron igual a. Expressando a ordem de grandeza do número de elétrons de condução
Física 01. Um fio metálico e cilíndrico é percorrido por uma corrente elétrica constante de. Considere o módulo da carga do elétron igual a. Expressando a ordem de grandeza do número de elétrons de condução
CAPACITORES IMPREGNADOS X CAPACITORES IMERSOS (PPM) EM BT
 EM BT") CAPACITORES IMPREGNADOS X CAPACITORES IMERSOS (PPM) EM BT 1 - Objetivos: Este trabalho tem por objetivo apresentar as principais características técnicas dos capacitores convencionais do tipo imerso em
CAPACITORES IMPREGNADOS X CAPACITORES IMERSOS (PPM) EM BT 1 - Objetivos: Este trabalho tem por objetivo apresentar as principais características técnicas dos capacitores convencionais do tipo imerso em
CONHECIMENTOS ESPECÍFICOS TÉCNICO EM ELETRÔNICA
 CONHECIMENTOS ESPECÍFICOS TÉCNICO EM ELETRÔNICA 26. Com relação aos materiais semicondutores, utilizados na fabricação de componentes eletrônicos, analise as afirmativas abaixo. I. Os materiais semicondutores
CONHECIMENTOS ESPECÍFICOS TÉCNICO EM ELETRÔNICA 26. Com relação aos materiais semicondutores, utilizados na fabricação de componentes eletrônicos, analise as afirmativas abaixo. I. Os materiais semicondutores
Escola de Educação Profissional SENAI Visconde de Mauá
 Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Maio de 2014 Revisão: A Prof Vander Campos Conhecer os princípios básicos do inversor de frequência; Saber interpretar
Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Maio de 2014 Revisão: A Prof Vander Campos Conhecer os princípios básicos do inversor de frequência; Saber interpretar
Fig. 13 Como um movimento de um passo se desenvolve quando a excitação é chaveada de Ph1 para Ph2.
 Como visto na Fig. 12, quando os dentes do rotor e do estator estão fora do alinhamento na fase excitada, a relutância magnética é grande. O motor RV trabalha para minimizar a relutância magnética. Vamos
Como visto na Fig. 12, quando os dentes do rotor e do estator estão fora do alinhamento na fase excitada, a relutância magnética é grande. O motor RV trabalha para minimizar a relutância magnética. Vamos
3 Transdutores de temperatura
 3 Transdutores de temperatura Segundo o Vocabulário Internacional de Metrologia (VIM 2008), sensores são elementos de sistemas de medição que são diretamente afetados por um fenômeno, corpo ou substância
3 Transdutores de temperatura Segundo o Vocabulário Internacional de Metrologia (VIM 2008), sensores são elementos de sistemas de medição que são diretamente afetados por um fenômeno, corpo ou substância
Física Experimental B Turma G
 Grupo de Supercondutividade e Magnetismo Física Experimental B Turma G Prof. Dr. Maycon Motta São Carlos-SP, Brasil, 2015 Prof. Dr. Maycon Motta E-mail: m.motta@df.ufscar.br Site: www.gsm.ufscar.br/mmotta
Grupo de Supercondutividade e Magnetismo Física Experimental B Turma G Prof. Dr. Maycon Motta São Carlos-SP, Brasil, 2015 Prof. Dr. Maycon Motta E-mail: m.motta@df.ufscar.br Site: www.gsm.ufscar.br/mmotta
Eletromecânicos de Manutenção Industrial
 Eletromecânicos de Manutenção Industrial Motor de passo a passo 2013/ 2014 1 Motores passo a passo Os motores de passo são dispositivos eletromecânicos que convertem pulsos elétricos em movimentos mecânicos
Eletromecânicos de Manutenção Industrial Motor de passo a passo 2013/ 2014 1 Motores passo a passo Os motores de passo são dispositivos eletromecânicos que convertem pulsos elétricos em movimentos mecânicos
Miguel C. Branchtein, Delegacia Regional do Trabalho no Rio Grande do Sul
 DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
COMPRESSORES PARAFUSO
 COMPRESSORES PARAFUSO PARTE 1 Tradução e adaptação da Engenharia de Aplicação da Divisão de Contratos YORK REFRIGERAÇÃO. Introdução Os compressores parafuso são hoje largamente usados em refrigeração industrial
COMPRESSORES PARAFUSO PARTE 1 Tradução e adaptação da Engenharia de Aplicação da Divisão de Contratos YORK REFRIGERAÇÃO. Introdução Os compressores parafuso são hoje largamente usados em refrigeração industrial
Como otimizar o desempenho e minimizar o tamanho em aplicações de alta velocidade Motores CC sem escova de alto desempenho
 thinkmotion Como otimizar o desempenho e minimizar o tamanho em aplicações de alta velocidade Motores CC sem escova de alto desempenho I. Introdução II. III. IV. Otimização de um motor CC sem escova para
thinkmotion Como otimizar o desempenho e minimizar o tamanho em aplicações de alta velocidade Motores CC sem escova de alto desempenho I. Introdução II. III. IV. Otimização de um motor CC sem escova para
Sensores de deslocamento
 Instrumentação Industrial - 1 Sensores de deslocamento Introdução Os sensores de deslocamento, de uma maneira geral, são instrumentos usados para medir o movimento de um corpo. Este movimento pode ser
Instrumentação Industrial - 1 Sensores de deslocamento Introdução Os sensores de deslocamento, de uma maneira geral, são instrumentos usados para medir o movimento de um corpo. Este movimento pode ser
MANUTENÇÃO ELÉTRICA INDUSTRIAL * ENROLAMENTOS P/ MOTORES CA *
 MANUTENÇÃO ELÉTRICA INDUSTRIAL * ENROLAMENTOS P/ MOTORES CA * Vitória ES 2006 7. ENROLAMENTOS PARA MOTORES DE CORRENTE ALTERNADA A maneira mais conveniente de associar vários condutores de um enrolamento
MANUTENÇÃO ELÉTRICA INDUSTRIAL * ENROLAMENTOS P/ MOTORES CA * Vitória ES 2006 7. ENROLAMENTOS PARA MOTORES DE CORRENTE ALTERNADA A maneira mais conveniente de associar vários condutores de um enrolamento
INSTRUMENTAÇÃO INDUSTRIAL 1. INTRODUÇÃO / DEFINIÇÕES
 1 INSTRUMENTAÇÃO INDUSTRIAL 1. INTRODUÇÃO / DEFINIÇÕES 1.1 - Instrumentação Importância Medições experimentais ou de laboratório. Medições em produtos comerciais com outra finalidade principal. 1.2 - Transdutores
1 INSTRUMENTAÇÃO INDUSTRIAL 1. INTRODUÇÃO / DEFINIÇÕES 1.1 - Instrumentação Importância Medições experimentais ou de laboratório. Medições em produtos comerciais com outra finalidade principal. 1.2 - Transdutores
Exercícios Leis de Kirchhoff
 Exercícios Leis de Kirchhoff 1-Sobre o esquema a seguir, sabe-se que i 1 = 2A;U AB = 6V; R 2 = 2 Ω e R 3 = 10 Ω. Então, a tensão entre C e D, em volts, vale: a) 10 b) 20 c) 30 d) 40 e) 50 Os valores medidos
Exercícios Leis de Kirchhoff 1-Sobre o esquema a seguir, sabe-se que i 1 = 2A;U AB = 6V; R 2 = 2 Ω e R 3 = 10 Ω. Então, a tensão entre C e D, em volts, vale: a) 10 b) 20 c) 30 d) 40 e) 50 Os valores medidos
FUNCIONAMENTO DE UM MONITOR CONTÍNUO DE OZÔNIO
 FUNCIONAMENTO DE UM MONITOR CONTÍNUO DE OZÔNIO 1. Introdução A melhor tecnologia para o monitoramento de baixas concentrações de ozônio (O 3 ) no ar ambiente é a da absorção de luz na faixa do Ultra Violeta
FUNCIONAMENTO DE UM MONITOR CONTÍNUO DE OZÔNIO 1. Introdução A melhor tecnologia para o monitoramento de baixas concentrações de ozônio (O 3 ) no ar ambiente é a da absorção de luz na faixa do Ultra Violeta
Bloco 3 do Projeto: Comparador com Histerese para Circuito PWM
 Bloco 3 do Projeto: Comparador com Histerese para Circuito PWM O circuito de um PWM Pulse Width Modulator, gera um trem de pulsos, de amplitude constante, com largura proporcional a um sinal de entrada,
Bloco 3 do Projeto: Comparador com Histerese para Circuito PWM O circuito de um PWM Pulse Width Modulator, gera um trem de pulsos, de amplitude constante, com largura proporcional a um sinal de entrada,
Eng. Everton Moraes. Transformadores
 Eng. Everton Moraes Eng. Everton Moraes Transformadores 1 Transformadores Sumário INTRODUÇÃO... 3 1. Máquinas Elétricas... 3 1.1. Magnetismo... 3 1.2. Eletromagnetismo... 5 1.3. Solenóide... 5 2. Transformadores
Eng. Everton Moraes Eng. Everton Moraes Transformadores 1 Transformadores Sumário INTRODUÇÃO... 3 1. Máquinas Elétricas... 3 1.1. Magnetismo... 3 1.2. Eletromagnetismo... 5 1.3. Solenóide... 5 2. Transformadores
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento