Concursos Micro-Rato. Ciber-Rato
|
|
|
- Matheus Henrique Castilho
- 4 Há anos
- Visualizações:
Transcrição


1 Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação Sumário Competições Robóticas Micro-Rato Ciber-Rato Video

 Dança a (Junior) AAAI Conferencista Robótico Missões de Socorro e Salvamento")
2 Motivação Utilizar a organização de competições para estimular o desenvolvimento de competências A Robótica Móvel e Autónoma permite aplicar muitos conceitos técnicos Aprender fazendo Competições Robóticas RoboCup Futebol Robótico Socorro e Salvamento (Rescue) Dança a (Junior) AAAI Conferencista Robótico Missões de Socorro e Salvamento Navegação e Interacção Etc


3 Competições Robóticas em Portugal Concurso Micro-Rato Resolver um labirinto Festival Nacional de Robótica Condução Autónoma Futebol Robótico Outros desafios Robot Bombeiro Apagar uma vela Concurso Micro-Rato Desafio: Criar um pequeno robot autónomo capaz de navegar num labirinto desconhecido Primeira edição ª edição em 2005! Modalidade Micro-Rato Modalidade Ciber-Rato
4 Chão verde Ambiente do Micro-Rato Ambiente do Micro-Rato Paredes delimitam uma zona de 10x5 metros
5 Ambiente do Micro-Rato Zona de Partida Zona do farol Ambiente do Micro-Rato Emissores de de infra-vermelhos Infra-vermelhos

6 Ambiente do Micro-Rato Labirinto com Obstáculos Ambiente do Micro-Rato
7 Desafio do Micro-Rato 1º - IDA: Ir da PARTIDA à CHEGADA dentro de um tempo limite (3 min) ( ) 2º - REGRESSO: voltar à PARTIDA parando o mais próximo possível desta e com o menor número de penalizações: (2001 ) Os Concorrentes Equipas de até 3 elementos Constroem um robot capaz de tentar a resolução dos desafios propostos Robot deve ser capaz de: Deslocar-se se evitando os obstáculos Orientar-se para um farol Parar na zona de chegada Regressar à partida sem qualquer ajuda externa
 Contruir um Robot Hardware Sensores Actuadores Software Interpretação dos dados sensoriais Tomada de decisões Comando dos")
8 Regras para Robots Pequenas dimensões Botões Paragem Arranque Luz de Sinalização Chegada ao farol Terminação da Prova Pára-choques 30cm (max) 30cm (max) Contruir um Robot Hardware Sensores Actuadores Software Interpretação dos dados sensoriais Tomada de decisões Comando dos actuadores
9 Locomoção Motores, Pernas Sensores Construir um Robot Hardware Proximidade, Chão, Farol, Contacto, Odometria, Bússola, Visão Inteligência Processador Energia Baterias, Pilhas, Ar comprimido Construir um Robot Software Interpretação dos dados sensoriais Tomada de decisões Comando dos actuadores Interpretação sensores Estado do Mundo Ambiente Exterior Decisão Comando actuadores

10 Micro-Rato - Pontuação Distância ao ponto de Partida + Penalizações Penalizações Colisões Não cumprir, ou cumprir apenas parcialmente, o 1º objectivo Não sinalizar a terminação da prova Competição Em cada prova participam 3 robôs 1º Manga: Todos os robots 2ª Manga: Todos os robots 3ª Manga: 12 Melhores 4º Manga e Final: 3 melhores
11 Ciber-Rato Micro-Rato em ambiente simulado Simulador implementa recinto e corpos dos robots virtuais Órgãos sensoriais e motores iguais para todos os robots Concorrentes participam com os cérebros dos robots (programas de computador) Cérebros tomam decisões sozinhos (agentes de software) Destinado a equipas vocacionadas para o desenvolvimento de software Ciber-Rato - Ambiente Ambiente: Labirinto com uma grelha de partida, um farol e paredes altas e baixas
12 Desafio Ciber-Rato Estado inicial: Robots são colocados na grelha de partida Desafio Ciber-Rato 1º Objectivo: Chegar à zona do farol
 Actuadores Actuadores 2 Motores Alguns LEDs Sensor Obstáculos Esquerda 60º Motor Esquerdo 60º 60º Sensor de Farol Bússola, GPS e Leds Sensor Obstáculos Centro 60º 0.")
13 Desafio Ciber-Rato 2º Objectivo: Regressar o mais próximo possível da posição de partida num tempo mínimo Robot Virtual O Robot Virtual está equipado com: Sensores Obstáculos Farol Chão Colisões Bússola GPS (debug) Actuadores Actuadores 2 Motores Alguns LEDs Sensor Obstáculos Esquerda 60º Motor Esquerdo 60º 60º Sensor de Farol Bússola, GPS e Leds Sensor Obstáculos Centro 60º 0.5 Sensor Obstáculos Direita 60º Sensor Colisões Motor Direito
14 Sensores de Obstáculos Medida é inversamente proporcional ao obstáculo mais próximo 60º 60º 1/M Sensor Obstáculos Centro 1/M 1/M Sensor Obstáculos Esquerda 60º 60º Sensor Obstáculos Direita Sensor de Farol Medida é o ângulo entre a frente do robot e o farol Farol M Sensor de Farol
15 Bússola Medida é o ângulo entre a frente do robot e o Norte virtual M Norte Colisões Sensor binário activado quando o robot colide com um obstáculo Sensor Colisões
16 Motores Actuando nos motores os agentes controlam o movimento do robot Motor Esquerdo Motor Direito Motor Esquerdo Motor Direito Arquitectura Geral Sistema distribuído do cliente-servidor Servidor: Simulador Clientes: s e Visualizadores Comunicação por Sockets UDP Mensagens XML Ficheiros de Configuração em XML Labirinto, grelha de partida, parâmetros de simulação
17 Param Grelha Lab Arquitectura Geral Log Sensores Simulador Motores Start/Stop Posição Visualizador/ Painel de Controlo Simulador Log Lab Grelha Param Sensores Motore s Posição Start/Stop Visualizador/ Painel de Controlo
18 Simulador Log Lab Grelha Param Motore s Sensores Implementa os corpos dos robots virtuais Posição Start/Stop Visualizador/ Painel de Controlo Simulador Log Grelha Lab Param Motore s Sensores Coordena movimento dos robots no labirinto em articulação com os agentes robóticos Posição Start/Stop Visualizador/ Painel de Controlo

19 Simulador Log Lab Grelha Param Desempenha o papel de juiz de prova: controla tempo de prova, aplica penalizações, calcula pontuações,... Sensores Motore s Posição Start/Stop Visualizador/ Painel de Controlo Interacção Simulador- Simulador Envia percepções Recebe percepções Toma decisões Recebe acções Envia acções Efectua movimento O tempo é discreto
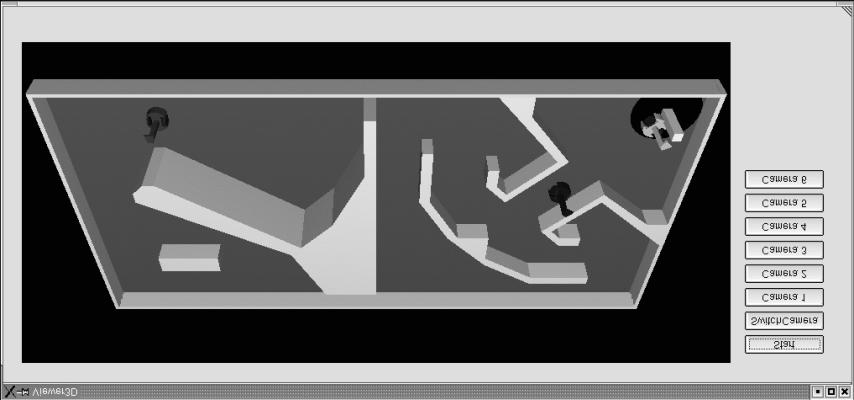
20 Visualização Visualização
21 s Programados em qualquer linguagem/so Biblioteca de comunicações C, Prolog, Java, Visual Basic fornecida Concorrentes Windows/Linux, C/C++/Delphi/VB reactivo em C disponibilizado São disponibilizadas ferramentas para apoio ao desenvolvimento Alguns dos executáveis de anos anteriores são também m disponibilizados pelas equipas s Protocolo de comunicação Mensagem de medidas <Measures Time= 105 > <Sensors Compass= 100 Beacon= 23 Collision= No Ground= No > <IRSensor Id="0" Value= 0.5" <IRSensor Id="1" Value= 1.4" <IRSensor Id="2" Value= 8.0" </Sensors> <Leds EndLed= Off" ReturningLed= On"/> <Buttons Start= On" Stop= Off"/> </Measures>
22 s Protocolo de comunicação Mensagem de actuação <Actions LeftMotor= -0.6" RightMotor= 0.1" EndLed= Off ReturningLed= Off /> Ciber-Rato - Pontuação Distância ao ponto de Partida + Tempo de regresso em excesso + Penalizações Penalizações Colisões Não cumprir o 1º objectivo Não sinalizar a terminação da prova





23 1ª edição equipas Chegar ao farol História Próxima 2ª edição edição 2002 do Micro-Rato e Ciber-Rato 13 equipas Novo visualizador 11 de Maio de 2005 CONCORRAM! 3ª edição equipas () Regresso ao ponto de partida 4ª edição equipas Ruído gaussiano, inércia Video
24 Demo
O Simulador Ciber-Rato. e o. ƒ Concurso Ciber-Rato. Estrutura da Apresentação
 O Simulador Ciber-Rato e o Concurso Micro-Rato Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da
O Simulador Ciber-Rato e o Concurso Micro-Rato Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Competições Robóticas
 Competições Robóticas Em Portugal e no Mundo Robótica FEUP LEIC 2005/2006 José Pedro Ferreira e Simão Rio Esquema da Apresentação Micromouse Micro-Rato Fire Fighting Robot Contest Trinity College Robô
Competições Robóticas Em Portugal e no Mundo Robótica FEUP LEIC 2005/2006 José Pedro Ferreira e Simão Rio Esquema da Apresentação Micromouse Micro-Rato Fire Fighting Robot Contest Trinity College Robô
Concurso Micro-Rato 2003 Regras e Especificações Técnicas da Modalidade Ciber
 Concurso Micro-Rato 2003 Regras e Especificações Técnicas da Modalidade Ciber (Março de 2003) 1 Introdução A modalidade Ciber do concurso Micro-Rato é uma competição entre robots virtuais, que decorre
Concurso Micro-Rato 2003 Regras e Especificações Técnicas da Modalidade Ciber (Março de 2003) 1 Introdução A modalidade Ciber do concurso Micro-Rato é uma competição entre robots virtuais, que decorre
Mais informação disponível em: Entrada gratuita, entre as 10:00 e as 23:00. Estão em competição as seguintes ligas:
 O Robótica 2012 - Festival Nacional de Robótica, decorre de 12 a 15 de Abril, no Multiusos de Guimarães. Trata-se de um evento anual, organizado pela Universidade do Minho e pela SAR Soluções de Automação
O Robótica 2012 - Festival Nacional de Robótica, decorre de 12 a 15 de Abril, no Multiusos de Guimarães. Trata-se de um evento anual, organizado pela Universidade do Minho e pela SAR Soluções de Automação
Competições de Robótica
 Competições de Robótica Carolina de Oliveira Mykael dos Santos Sara Mariana Lorençoni Sarnaglia Resumo Observando o avanço tecnológico e a futura dominação de robôs no mundo, é possível entender que o
Competições de Robótica Carolina de Oliveira Mykael dos Santos Sara Mariana Lorençoni Sarnaglia Resumo Observando o avanço tecnológico e a futura dominação de robôs no mundo, é possível entender que o
parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web:
 Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Competição.
 Competição Regras e Especificações Técnicas Robot@Factory (7 de Janeiro de 2011) Introdução Nesta competição procura- se recriar um problema inspirado nos desafios que um robô autónomo terá de enfrentar
Competição Regras e Especificações Técnicas Robot@Factory (7 de Janeiro de 2011) Introdução Nesta competição procura- se recriar um problema inspirado nos desafios que um robô autónomo terá de enfrentar
Propostas de dissertações em Robótica Móvel e Inteligente
 Propostas de dissertações em Robótica Móvel e Inteligente António Neves, Nuno Lau, José Azevedo, Pedro Fonseca, Artur Pereira, Bernardo Cunha,... ({an,nunolau,jla,pf,artur}@ua.pt, mbc@det.ua.pt) Actividade
Propostas de dissertações em Robótica Móvel e Inteligente António Neves, Nuno Lau, José Azevedo, Pedro Fonseca, Artur Pereira, Bernardo Cunha,... ({an,nunolau,jla,pf,artur}@ua.pt, mbc@det.ua.pt) Actividade
Prova Júnior REGRAS. First Challenger. Autores do documento: André Dias Vitor Cerqueira. Academia de Robótica Sociedade Portuguesa de Robótica (SPR)
") Prova Júnior REGRAS First Challenger Organização: Academia de Robótica Sociedade Portuguesa de Robótica (SPR) Autores do documento: André Dias Vitor Cerqueira Conteúdo 1 Competição First Challenger 2 2
Prova Júnior REGRAS First Challenger Organização: Academia de Robótica Sociedade Portuguesa de Robótica (SPR) Autores do documento: André Dias Vitor Cerqueira Conteúdo 1 Competição First Challenger 2 2
Ciber-FEUP Um Agente para Utilizar o Simulador Ciber-Rato no Ensino da Inteligência Artificial e Robótica Inteligente
 Ciber-FEUP Um Agente para Utilizar o Simulador Ciber-Rato no Ensino da Inteligência Artificial e Robótica Inteligente Luís Paulo Reis 1,2,3 lpreis@fe.up.pt 1 Laboratório de Inteligência Artificial e Ciência
Ciber-FEUP Um Agente para Utilizar o Simulador Ciber-Rato no Ensino da Inteligência Artificial e Robótica Inteligente Luís Paulo Reis 1,2,3 lpreis@fe.up.pt 1 Laboratório de Inteligência Artificial e Ciência
AUTOMAÇÃO INDUSTRIAL
 AUTOMAÇÃO INDUSTRIAL 3º ano Engenharia Mecânica 2º semestre 2006/2007 Guias de Laboratório 5 Objectivo Implementação dum sistema de comando de lógico através dum autómato programável usando a linguagem
AUTOMAÇÃO INDUSTRIAL 3º ano Engenharia Mecânica 2º semestre 2006/2007 Guias de Laboratório 5 Objectivo Implementação dum sistema de comando de lógico através dum autómato programável usando a linguagem
idronecup SMART MINI DRONES
 idronecup SMART MINI DRONES REGULAMENTO 2016 Versão 2.0 18/04/2016 Índice ÂMBITO... 3 Kit Competição... 3 ORGANIZAÇÃO... 4 CONTACTOS E SUPORTE... 4 1. idrone Race... 5 2. idrone ZIGZAG... 9 3. idrone Maze...
idronecup SMART MINI DRONES REGULAMENTO 2016 Versão 2.0 18/04/2016 Índice ÂMBITO... 3 Kit Competição... 3 ORGANIZAÇÃO... 4 CONTACTOS E SUPORTE... 4 1. idrone Race... 5 2. idrone ZIGZAG... 9 3. idrone Maze...
Sistema de Controlo de Locomoção para Veículos Autónomos Terrestres. António Sérgio Gonçalves
 Sistema de Controlo de Locomoção para Veículos Autónomos Terrestres António Sérgio Gonçalves 2006 Projecto de fim de curso Lic. Eng. Electrotécnica Electrónica e Computadores Ramo de Automação e Sistemas
Sistema de Controlo de Locomoção para Veículos Autónomos Terrestres António Sérgio Gonçalves 2006 Projecto de fim de curso Lic. Eng. Electrotécnica Electrónica e Computadores Ramo de Automação e Sistemas
Modalidade Ciber do Concurso Micro-Rato 2005
 Departamento de Electrónica e Telecomunicações Universidade de Aveiro Modalidade Ciber do Concurso Micro-Rato 2005 Regras e Especificações Técnicas (Fevereiro de 2005) 2 CONTEÚDO Conteúdo 1 Introdução
Departamento de Electrónica e Telecomunicações Universidade de Aveiro Modalidade Ciber do Concurso Micro-Rato 2005 Regras e Especificações Técnicas (Fevereiro de 2005) 2 CONTEÚDO Conteúdo 1 Introdução
4 Desenvolvimento de Algoritmos de controle
 4 Desenvolvimento de Algoritmos de controle 4.1 Introdução Os estudos das características sensoriais e equações de movimento realizados com o robô ER1, junto com as ferramentas de simulação, permitem o
4 Desenvolvimento de Algoritmos de controle 4.1 Introdução Os estudos das características sensoriais e equações de movimento realizados com o robô ER1, junto com as ferramentas de simulação, permitem o
PROJECTOS EM DESENVOLVIMENTO?
 PROJECTOS EM DESENVOLVIMENTO? 5DPO FUTEBOL ROBÓTICO FAST VELEIRO AUTÓNOMO 1 Projectos de investigação que estão em desenvolvimento no DEEC O GRUPO ELE325 PROJECTO FEUP Hugo José Magalhães Costa Inês Alexandra
PROJECTOS EM DESENVOLVIMENTO? 5DPO FUTEBOL ROBÓTICO FAST VELEIRO AUTÓNOMO 1 Projectos de investigação que estão em desenvolvimento no DEEC O GRUPO ELE325 PROJECTO FEUP Hugo José Magalhães Costa Inês Alexandra
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Aula 3 Programação. LEGO NXT-G
 Portfolio MEEC 1 Aula 3 Programação. LEGO NXT-G Objectivo Introdução à programação do LEGO NXT-2, que será usado no lab. Portfolio MEEC 2 O que é um programa de computador? Conjunto de instruções que visam
Portfolio MEEC 1 Aula 3 Programação. LEGO NXT-G Objectivo Introdução à programação do LEGO NXT-2, que será usado no lab. Portfolio MEEC 2 O que é um programa de computador? Conjunto de instruções que visam
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Visualizador 3D para o Ciber-Rato
 ELECTRÓNICA E TELECOMUNICAÇÕES, VOL. 5, Nº 1, JUNHO 2009 75 Visualizador 3D para o Ciber-Rato Joaquim Fonseca, Flávio Fonseca, Artur Pereira, Paulo Dias, Resumo - O Ciber-Rato é uma competição de robótica,
ELECTRÓNICA E TELECOMUNICAÇÕES, VOL. 5, Nº 1, JUNHO 2009 75 Visualizador 3D para o Ciber-Rato Joaquim Fonseca, Flávio Fonseca, Artur Pereira, Paulo Dias, Resumo - O Ciber-Rato é uma competição de robótica,
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Departamento de Economia, Sociologia e Gestão Curso de Gestão 3º Ano Disciplina: Inovação e Gestão da Mudança
 Departamento de Economia, Sociologia e Gestão Curso de Gestão 3º Ano Disciplina: Inovação e Gestão da Mudança INOVAÇÃO Três robots da UTAD premiados em festival de Robótica - Curso de Engenharia Electrotécnica
Departamento de Economia, Sociologia e Gestão Curso de Gestão 3º Ano Disciplina: Inovação e Gestão da Mudança INOVAÇÃO Três robots da UTAD premiados em festival de Robótica - Curso de Engenharia Electrotécnica
Concurso Micro-Rato 2004
 Concurso Micro-Rato 2004 Regras e Especificações Técnicas da Modalidade Ciber (26 de Fevereiro de 2004) 1 2 CONTEÚDO Conteúdo 1 Introdução 3 2 O Sistema de Simulação 3 3 O Corpo do Robot Virtual 4 3.1
Concurso Micro-Rato 2004 Regras e Especificações Técnicas da Modalidade Ciber (26 de Fevereiro de 2004) 1 2 CONTEÚDO Conteúdo 1 Introdução 3 2 O Sistema de Simulação 3 3 O Corpo do Robot Virtual 4 3.1
Metodologias de Inteligência Artificial 2005/2006
 Arquitecturas de Agentes Metodologias de Inteligência Artificial 2005/2006 Agente Reactivo Agentes Reactivos (Reflexivos): Não tem Estado interno see mapeia Estados do ambiente em Percepções: S P action
Arquitecturas de Agentes Metodologias de Inteligência Artificial 2005/2006 Agente Reactivo Agentes Reactivos (Reflexivos): Não tem Estado interno see mapeia Estados do ambiente em Percepções: S P action
A Real-Time Framework for the Vision Subsystem in Autonomous Mobile Robots
 Sistemas de Tempo Real 2009/2010 Universidade de Aveiro A Real-Time Framework for the Vision Subsystem in Autonomous Mobile Robots Fábio Amado 33637 fmna@ua.pt João Maio 33306 jpsmaio@ua.pt Índice 1. Introdução
Sistemas de Tempo Real 2009/2010 Universidade de Aveiro A Real-Time Framework for the Vision Subsystem in Autonomous Mobile Robots Fábio Amado 33637 fmna@ua.pt João Maio 33306 jpsmaio@ua.pt Índice 1. Introdução
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
O robô tem que percorrer um circuito, demarcado por uma linha preta num fundo branco, no menor tempo possível.
 DESAFIO RACE OF CHAMPIONS O teu robô terá que seguir uma linha e completar uma volta ao circuito no menor tempo possível! Um desafio à tua programação! RACE OF CHAMPIONS - REGULAMENTO: Regulamento Corrida
DESAFIO RACE OF CHAMPIONS O teu robô terá que seguir uma linha e completar uma volta ao circuito no menor tempo possível! Um desafio à tua programação! RACE OF CHAMPIONS - REGULAMENTO: Regulamento Corrida
Frederico Miguel Santos
 Frederico Miguel Santos DEE ISEC DETI/IEETA - UA Sumário 1. RoboCup 1. descrição / objectivos 2. MSL - futebol,,porquê? 2. CAMBADA 1. descrição / objectivos 2. evolução 3. hardware 4. software: coordenação
Frederico Miguel Santos DEE ISEC DETI/IEETA - UA Sumário 1. RoboCup 1. descrição / objectivos 2. MSL - futebol,,porquê? 2. CAMBADA 1. descrição / objectivos 2. evolução 3. hardware 4. software: coordenação
Sistema económico de localização relativa para robôs móveis e autónomos
 Sistema económico de localização relativa para robôs móveis e autónomos Valter Filipe Silva 1, Frederico Miguel Santos 2 1 Escola Superior de Tecnologia de Castelo Branco, Castelo Branco, vfs@est.ipcb.pt
Sistema económico de localização relativa para robôs móveis e autónomos Valter Filipe Silva 1, Frederico Miguel Santos 2 1 Escola Superior de Tecnologia de Castelo Branco, Castelo Branco, vfs@est.ipcb.pt
D. Dinis: um Robô com Sentido de Orientação
 2REVISTA DO DETUA, VOL. 2, Nº 5, SETEMBRO 1999 D. Dinis: um Robô com Sentido de Orientação Luís Seabra Lopes 1, José Nuno Lau 1, Luís Paulo Reis 2 1 Departamento de Electrónica e Telecomunicações, Universidade
2REVISTA DO DETUA, VOL. 2, Nº 5, SETEMBRO 1999 D. Dinis: um Robô com Sentido de Orientação Luís Seabra Lopes 1, José Nuno Lau 1, Luís Paulo Reis 2 1 Departamento de Electrónica e Telecomunicações, Universidade
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Placa Eletrônica para Robôs Móveis
 Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
2º Laboratório de Sistemas e Sinais (LEIC Alameda 2008/09)
") 2º Laboratório de Sistemas e Sinais (LEIC Alameda 2008/09) Data de realização e de entrega: aula das semanas 6-17/Abril /2009. Local da realização: Laboratório de Controlo, Automação e Robótica, localizado
2º Laboratório de Sistemas e Sinais (LEIC Alameda 2008/09) Data de realização e de entrega: aula das semanas 6-17/Abril /2009. Local da realização: Laboratório de Controlo, Automação e Robótica, localizado
Inteligência Artificial
 Introdução à Robótica (Inteligente) Apresentação da Disciplina Docentes Eugénio Oliveira Luís Paulo Reis 1 Inteligência Inteligência Artificial Capacidade de utilizar o conhecimento para resolver novos
Introdução à Robótica (Inteligente) Apresentação da Disciplina Docentes Eugénio Oliveira Luís Paulo Reis 1 Inteligência Inteligência Artificial Capacidade de utilizar o conhecimento para resolver novos
LARC/CBR Latin America Robotics Competition/Competição Brasileira de Robótica. Robotino Logistics Competition
 LARC/CBR 2018 Latin America Robotics Competition/Competição Brasileira de Robótica Robotino Logistics Competition Introdução Estrutura da competição Prova modular 3 dias com 2 módulos. Não haverá restrição
LARC/CBR 2018 Latin America Robotics Competition/Competição Brasileira de Robótica Robotino Logistics Competition Introdução Estrutura da competição Prova modular 3 dias com 2 módulos. Não haverá restrição
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Pedro Tavares João Nuno Gonçalo Joana Cruz Joana Miller
 Pedro Tavares João Nuno Gonçalo Joana Cruz Joana Miller 1-Tópicos: os aspectos que constituem os sistemas robóticos, (fundamento e bases, componentes e tecnologias usadas neles); as diferentes aplicações
Pedro Tavares João Nuno Gonçalo Joana Cruz Joana Miller 1-Tópicos: os aspectos que constituem os sistemas robóticos, (fundamento e bases, componentes e tecnologias usadas neles); as diferentes aplicações
Competições FPV Regulamento Versão
 Competições FPV Regulamento Versão 0.3 19-04-2017 Promotores O idrone FPV é uma prova integrada no idrone Experience 2017, promovido por: Com o apoio de: Pista A pista tem um perímetro de cerca de 200
Competições FPV Regulamento Versão 0.3 19-04-2017 Promotores O idrone FPV é uma prova integrada no idrone Experience 2017, promovido por: Com o apoio de: Pista A pista tem um perímetro de cerca de 200
Lego NXT: Navegação e Localização com sensores de distância baseados em infra-vermelhos utilizando um Extended Kalman Filter
 Lego NXT: Navegação e Localização com sensores de distância baseados em infra-vermelhos utilizando um Extended Kalman Filter Miguel Pinto Sistemas Robóticos Autónomos 1 Resumo LegoFeup Localização Cenários
Lego NXT: Navegação e Localização com sensores de distância baseados em infra-vermelhos utilizando um Extended Kalman Filter Miguel Pinto Sistemas Robóticos Autónomos 1 Resumo LegoFeup Localização Cenários
Jules Verne Leagues Under the Sea. Tópicos
 Robótica Subaquática The great depths of the ocean are entirely unknown to us. Soundings cannot reach them. What passes in those remote depths we can scarcely conjecture. Jules Verne - 20000 Leagues Under
Robótica Subaquática The great depths of the ocean are entirely unknown to us. Soundings cannot reach them. What passes in those remote depths we can scarcely conjecture. Jules Verne - 20000 Leagues Under
Estrutura da Apresentação
 Programação do ERS210A utilizando o OPEN-R R SDK Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da
Programação do ERS210A utilizando o OPEN-R R SDK Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da
Arquiteturas de Software
 Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Regras Robô Trekking. Documento Revisado 06/05/ :06
 Regras Robô Trekking Documento Revisado 06/05/2018 17:06 1. Introdução 03 2. Especificações dos Robôs 03 3. O Ambiente 03 4. A Partida 04 RoboCore Sua Tecnologia à Prova www.robocore.net 2/5 1. Introdução
Regras Robô Trekking Documento Revisado 06/05/2018 17:06 1. Introdução 03 2. Especificações dos Robôs 03 3. O Ambiente 03 4. A Partida 04 RoboCore Sua Tecnologia à Prova www.robocore.net 2/5 1. Introdução
Guia do Utilizador Sistema de controlo LogiComm
 Guia do Utilizador Sistema de controlo LogiComm P/N 7979 - Portuguese - Menu principal Este Guia do Utilizador fornece tarefas comuns de geração de padrões, de verificação do produto e de configuração
Guia do Utilizador Sistema de controlo LogiComm P/N 7979 - Portuguese - Menu principal Este Guia do Utilizador fornece tarefas comuns de geração de padrões, de verificação do produto e de configuração
é a saida do melhor individuo. A configuração de parâmetros da
 61 4 4.1. Configuração Neste capítulo, comparam-se os resultados e o desempenho obtidos pela PGLIQ com a extensão do modelo proposto GPU-PGLIQ-I que foi desenvolvido nesta dissertação. Apresentam-se dois
61 4 4.1. Configuração Neste capítulo, comparam-se os resultados e o desempenho obtidos pela PGLIQ com a extensão do modelo proposto GPU-PGLIQ-I que foi desenvolvido nesta dissertação. Apresentam-se dois
5 Testes e Resultados
 5 Testes e Resultados Neste capítulo serão apresentados experimentos que ilustram as implementações desenvolvidas e propostas no capítulo anterior. São mostrados experimentos que investigam o algoritmo
5 Testes e Resultados Neste capítulo serão apresentados experimentos que ilustram as implementações desenvolvidas e propostas no capítulo anterior. São mostrados experimentos que investigam o algoritmo
Motor Schemas. Um pouco de história. Método do Teorema de Esquemas: Teoria de Esquemas Neurofisiológicos:
 Motor Schemas Luís Paulo, n.º 29071 Um pouco de história Método do Teorema de Esquemas: Século XVIII; Immanuel Kant; Modelo filosófico para a explicação de comportamentos; A sua compreensão é usada para
Motor Schemas Luís Paulo, n.º 29071 Um pouco de história Método do Teorema de Esquemas: Século XVIII; Immanuel Kant; Modelo filosófico para a explicação de comportamentos; A sua compreensão é usada para
Simulação de Futebol de Robôs
 Departamento de Engenharia Elétrica Simulação de Futebol de Robôs Aluna: Bianca Burgos Maron Orientadora: Marley Vellasco Introdução A inteligência computacional e suas aplicações em robôs inteligentes
Departamento de Engenharia Elétrica Simulação de Futebol de Robôs Aluna: Bianca Burgos Maron Orientadora: Marley Vellasco Introdução A inteligência computacional e suas aplicações em robôs inteligentes
Exemplo de Arquitetura em Camadas. Arquiteturas de Software. Aplicações-fim
 Exemplo de Arquitetura em Camadas Arquiteturas de Software Aplicações-fim Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados
Exemplo de Arquitetura em Camadas Arquiteturas de Software Aplicações-fim Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados
Abordagem do uso de DRONE DJI PHANTOM para inspeções de engenharia - Modulo1
 Abordagem do uso de DRONE DJI PHANTOM para inspeções de engenharia - Modulo1 Conhecimentos básicos do uso de drones para acompanhamento de obras, plantas industriais, tubulações e estruturas de engenharia.
Abordagem do uso de DRONE DJI PHANTOM para inspeções de engenharia - Modulo1 Conhecimentos básicos do uso de drones para acompanhamento de obras, plantas industriais, tubulações e estruturas de engenharia.
Sniffer: Um Robot Baseado em Arbitragem de Comportamentos Autónomos e Reactivos
 REVISTA DO DETUA, VOL. 3, Nº 2, OUTUBRO 2000 Sniffer: Um Robot Baseado em Arbitragem de Comportamentos Autónomos e Reactivos Arnaldo Oliveira, Andreia Melo Resumo - Este artigo descreve os aspectos mais
REVISTA DO DETUA, VOL. 3, Nº 2, OUTUBRO 2000 Sniffer: Um Robot Baseado em Arbitragem de Comportamentos Autónomos e Reactivos Arnaldo Oliveira, Andreia Melo Resumo - Este artigo descreve os aspectos mais
Introdução. Introdução. Introdução. Introdução Classificação. Introdução Classificação. Introdução à Robótica Sensores
 à Robótica Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Localização Modelo do ambiente Mapa Local Percepção Posição Mapa Global Mundo Real Cognição Planejamento Caminho Controle à Robótica -
à Robótica Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Localização Modelo do ambiente Mapa Local Percepção Posição Mapa Global Mundo Real Cognição Planejamento Caminho Controle à Robótica -
Agentes Autónomos e Sistemas Multiagente
 Instituto Superior Técnico Licenciatura e Mestrado em Engenharia Informática e de Computadores Campus Alameda e Tagus Park Agentes Autónomos e Sistemas Multiagente 1 o Exame 8 de Julho de 2006 11:00h 13:00h
Instituto Superior Técnico Licenciatura e Mestrado em Engenharia Informática e de Computadores Campus Alameda e Tagus Park Agentes Autónomos e Sistemas Multiagente 1 o Exame 8 de Julho de 2006 11:00h 13:00h
ROBÓTICA INDUSTRIAL MECATRÔNICA
 A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
O DS 01P fornece uma corrente de 100mA ao condutor de sinalização.
 DS 24P 60P 96P Fonte de Alimentação As fontes de alimentação fornecem uma tensão de 24 VDC e uma corrente de 1A, 2,5A e 4A consoante o tipo da mesma. A quantidade de módulos que podem ser ligados numa
DS 24P 60P 96P Fonte de Alimentação As fontes de alimentação fornecem uma tensão de 24 VDC e uma corrente de 1A, 2,5A e 4A consoante o tipo da mesma. A quantidade de módulos que podem ser ligados numa
Processo térmico multivariável apropriado para controlo por computador
 Processo térmico multivariável apropriado para controlo por computador Manual de utilização Faculdade de Engenharia de Universidade do Porto 2002 António Paulo Gomes Mendes Moreira Paulo Gomes da Costa
Processo térmico multivariável apropriado para controlo por computador Manual de utilização Faculdade de Engenharia de Universidade do Porto 2002 António Paulo Gomes Mendes Moreira Paulo Gomes da Costa
Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus)
") Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
AG V AUTOMATIC GUIDED VEHICLE. Grupo 3 Bruno Ramos Nº Rui Ramos Nº Sérgio Calado Nº 46702
 AG V Grupo 3 Bruno Ramos Nº 46494 Rui Ramos Nº 46693 Sérgio Calado Nº 46702 INTRODUÇÃO O que são AGVs? Quais as suas aplicações? Capacidade de carga. Sistemas de Referência. Comunicação. Problemas nos
AG V Grupo 3 Bruno Ramos Nº 46494 Rui Ramos Nº 46693 Sérgio Calado Nº 46702 INTRODUÇÃO O que são AGVs? Quais as suas aplicações? Capacidade de carga. Sistemas de Referência. Comunicação. Problemas nos
José Valente, André Ranito, Nuno Fernandes, João Costa, Carlos Silva José Carlos Alves (faculty advisor)
") José Valente, André Ranito, Nuno Fernandes, João Costa, Carlos Silva José Carlos Alves (faculty advisor) Engenharia Eletrotécnica e de Computadores da Universidade do Porto AFCEA Porto Student Club Onde
José Valente, André Ranito, Nuno Fernandes, João Costa, Carlos Silva José Carlos Alves (faculty advisor) Engenharia Eletrotécnica e de Computadores da Universidade do Porto AFCEA Porto Student Club Onde
CENTRAL DE INCÊNDIO ENDEREÇÁVEL
 CENTRAL DE INCÊNDIO ENDEREÇÁVEL MANUAL UTILIZADOR PT v1.2013 INDICE 1. CÓDIGOS DE ACESSO... 3 1.1 Tabela Códigos de Fábrica... 3 1.2 Introduzir Códigos... 3 1.3 Tabela dos Níveis de Acesso... 4 2. ESTADO
CENTRAL DE INCÊNDIO ENDEREÇÁVEL MANUAL UTILIZADOR PT v1.2013 INDICE 1. CÓDIGOS DE ACESSO... 3 1.1 Tabela Códigos de Fábrica... 3 1.2 Introduzir Códigos... 3 1.3 Tabela dos Níveis de Acesso... 4 2. ESTADO
Introdução aos Agentes Autónomos. (UD1) Introdução- Part II IST- 2006/2007
 Introdução- Part II IST- 2006/2007") Introdução aos Agentes Autónomos (UD1) Introdução- Part II IST- 2006/2007 Propriedades de Agentes As definições não nos dizem praticamente nada da forma como os agentes vão ser. Assim, actualmente caracterizam-se
Introdução aos Agentes Autónomos (UD1) Introdução- Part II IST- 2006/2007 Propriedades de Agentes As definições não nos dizem praticamente nada da forma como os agentes vão ser. Assim, actualmente caracterizam-se
Robôs de Serviços. Pedro U. Lima. Instituto Superior Técnico Universidade Técnica de Lisboa Portugal. Portfólio
 Robôs de Serviços Pedro U. Lima Instituto Superior Técnico Universidade Técnica de Lisboa Portugal 1 Tópicos Exemplos de Robôs Sistemas Componentes de Robôs e Relação com Outras Áreas da EEC Cooperação
Robôs de Serviços Pedro U. Lima Instituto Superior Técnico Universidade Técnica de Lisboa Portugal 1 Tópicos Exemplos de Robôs Sistemas Componentes de Robôs e Relação com Outras Áreas da EEC Cooperação
1º Teste de Agentes Autónomos e Sistemas Multi-Agente. Mestado em Engª Informática e Computadores- MEIC-T 30 de Março de 2011 Duração: 1h30m
 1º Teste de Agentes Autónomos e Sistemas Multi-Agente Mestado em Engª Informática e Computadores- MEIC-T 30 de Março de 2011 Duração: 1h30m Aluno Número: Nome: Classificação final: 1. (2.0) Autonomous
1º Teste de Agentes Autónomos e Sistemas Multi-Agente Mestado em Engª Informática e Computadores- MEIC-T 30 de Março de 2011 Duração: 1h30m Aluno Número: Nome: Classificação final: 1. (2.0) Autonomous
1. Introdução. Capítulo Enquadramento
 Capítulo 1 1. Introdução 1.1 Enquadramento O trabalho descrito nesta tese está relacionado com o estudo e proposta de metodologias de coordenação de Agentes computacionais 1 autónomos e sua aplicação em
Capítulo 1 1. Introdução 1.1 Enquadramento O trabalho descrito nesta tese está relacionado com o estudo e proposta de metodologias de coordenação de Agentes computacionais 1 autónomos e sua aplicação em
Processo Seletivo da Equipe USPDroids
 Processo Seletivo da Equipe USPDroids USPDroids Laboratório de Aprendizado de Robôs - ICMC - USP USPDroids (LAR - ICMC) USPDroids 1 / 37 Introdução Sumário 1 Introdução 2 Visão 3 Estratégia 4 Eletrônica
Processo Seletivo da Equipe USPDroids USPDroids Laboratório de Aprendizado de Robôs - ICMC - USP USPDroids (LAR - ICMC) USPDroids 1 / 37 Introdução Sumário 1 Introdução 2 Visão 3 Estratégia 4 Eletrônica
LARC/CBR 2017 Latin America Robotics Competition/Competição Brasileira de Robótica Robotino Logistics Competition
 LARC/CBR 2017 Latin America Robotics Competition/Competição Brasileira de Robótica Robotino Logistics Competition CBR2016 1 of 13 Introdução Estrutura da competição Prova modular 3 dias com 1 módulo a
LARC/CBR 2017 Latin America Robotics Competition/Competição Brasileira de Robótica Robotino Logistics Competition CBR2016 1 of 13 Introdução Estrutura da competição Prova modular 3 dias com 1 módulo a
FACULDADE LEÃO SAMPAIO
 FACULDADE LEÃO SAMPAIO Sistemas analógicos e digitais Curso de Análise e Desenvolvimento de Sistemas 1 Analógico x Digital Sinal analógico: O sinal analógico varia continuamente ao longo de uma faixa de
FACULDADE LEÃO SAMPAIO Sistemas analógicos e digitais Curso de Análise e Desenvolvimento de Sistemas 1 Analógico x Digital Sinal analógico: O sinal analógico varia continuamente ao longo de uma faixa de
ROBÓTICA PROGRAMAÇÃO DE ROBÔS
 ROBÓTICA PROGRAMAÇÃO DE ROBÔS Tipos de programação de robôs Programação a nível das juntas no qual as ações básicas são posições (e possivelmente movimentos) Programação a nível do robô no qual as ações
ROBÓTICA PROGRAMAÇÃO DE ROBÔS Tipos de programação de robôs Programação a nível das juntas no qual as ações básicas são posições (e possivelmente movimentos) Programação a nível do robô no qual as ações
Problemas para Automação Industrial. Série 4: Modelação usando o diagrama funcional GRAFCET. Programação de autómatos
 Problemas para Automação Industrial Série 4: Modelação usando o diagrama funcional GRAFCET. Programação de autómatos Nota prévia: Estes problemas têm como principal objectivo dar a possibilidade ao aluno
Problemas para Automação Industrial Série 4: Modelação usando o diagrama funcional GRAFCET. Programação de autómatos Nota prévia: Estes problemas têm como principal objectivo dar a possibilidade ao aluno
Retrofitting de Robôs. Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
 Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica fetter@eletro.ufrgs.br 1 Introdução Robôs Manipuladores Robôs Industriais Móveis
Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica fetter@eletro.ufrgs.br 1 Introdução Robôs Manipuladores Robôs Industriais Móveis
Regras Desafio Inteligente - Junior Temporada 2016
 Regras Desafio Inteligente - Junior Temporada 2016 Documento Revisado 29/02/2016 18:11 1. Introdução 03 2. Especificações dos Participantes 03 3. Especificações dos Robôs 03 4. O Ambiente 04 5. A Partida
Regras Desafio Inteligente - Junior Temporada 2016 Documento Revisado 29/02/2016 18:11 1. Introdução 03 2. Especificações dos Participantes 03 3. Especificações dos Robôs 03 4. O Ambiente 04 5. A Partida
Protótipo de um robô rastreador de objetos. Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer
 Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
EDITAL 01/2017 REGULAMENTO REGRAS DA COMPETIÇÃO LABIRINTO
 EDITAL 01/2017 II SETAI O CATAI Centro Acadêmico do Curso de Tecnologia em Automação Industrial, com sede no IFCE Campus Juazeiro do Norte, através de seu respectivo presidente, Anderson Aryel, torna público
EDITAL 01/2017 II SETAI O CATAI Centro Acadêmico do Curso de Tecnologia em Automação Industrial, com sede no IFCE Campus Juazeiro do Norte, através de seu respectivo presidente, Anderson Aryel, torna público
AUTOMAÇÃO INDUSTRIAL
 AUTOMAÇÃO INDUSTRIAL 3º ano Engenharia Mecânica 2º semestre 2007/2008 Guias de Laboratório 2 ATENÇÃO: LEIA ESTE GUIA ATÉ AO FIM ANTES DE QUALQUER IMPLEMENTAÇÃO. SE TIVER DÚVIDAS ESCLAREÇA-AS. Título: Implementação
AUTOMAÇÃO INDUSTRIAL 3º ano Engenharia Mecânica 2º semestre 2007/2008 Guias de Laboratório 2 ATENÇÃO: LEIA ESTE GUIA ATÉ AO FIM ANTES DE QUALQUER IMPLEMENTAÇÃO. SE TIVER DÚVIDAS ESCLAREÇA-AS. Título: Implementação
Aplicações Multi-usuário em Realidade Virtual
 HIPERPRESENÇA Visualização Remota para Aplicações Multi-usuário em Realidade Virtual Luiz Marcos Gonçalves, Guido L. Filho, Tatiana Tavares, André Mauricio e... Laboratório de Robótica e Percepção, Laboratório
HIPERPRESENÇA Visualização Remota para Aplicações Multi-usuário em Realidade Virtual Luiz Marcos Gonçalves, Guido L. Filho, Tatiana Tavares, André Mauricio e... Laboratório de Robótica e Percepção, Laboratório
College / university teaching professional
 Curriculum vitae INFORMAÇÃO PESSOAL Rua Lameira do Palheiro, Nº191, 2490-049 Ourém (Portugal) 913988802 910311277 nreis@engineer.com pt.linkedin.com/pub/nelson-reis/76/613/136/ Sexo Masculino Data de nascimento
Curriculum vitae INFORMAÇÃO PESSOAL Rua Lameira do Palheiro, Nº191, 2490-049 Ourém (Portugal) 913988802 910311277 nreis@engineer.com pt.linkedin.com/pub/nelson-reis/76/613/136/ Sexo Masculino Data de nascimento
TDP do time RECIFE SOCCER Futebol SPL
 1 TDP do time RECIFE SOCCER Futebol SPL Gabriel Alves da Silva 1, Paulo Martins Monteiro 2, Pedro Ferreira da Silva Junior 3, Simone Gomes Zelaquett 4, Tasso Luís Oliveira de Moraes 5. Resumo Este artigo
1 TDP do time RECIFE SOCCER Futebol SPL Gabriel Alves da Silva 1, Paulo Martins Monteiro 2, Pedro Ferreira da Silva Junior 3, Simone Gomes Zelaquett 4, Tasso Luís Oliveira de Moraes 5. Resumo Este artigo
Robótica dos nossos dias
 Robótica dos nossos dias A evolução dos Humanóides Supervisor: Professora Teresa Duarte Monitor: Fernando Silva Luís Miguel Cardoso Seixas up201402833 Patrick David Roberto Mills up201403350 Paulo Jorge
Robótica dos nossos dias A evolução dos Humanóides Supervisor: Professora Teresa Duarte Monitor: Fernando Silva Luís Miguel Cardoso Seixas up201402833 Patrick David Roberto Mills up201403350 Paulo Jorge
Atuadores em Robótica
 Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
ROBÓTICA CAD / CAM PROGRAMA DE FORMAÇÃO
 ROBOWORK Departamento de Formação em Robótica Industrial ROBÓTICA CAD / CAM PROGRAMA DE FORMAÇÃO AVEIRO DEZEMBRO DE 2016 1 / 6 1. NOTA PRÉVIA O programa de formação que apresentamos de seguida, reflecte
ROBOWORK Departamento de Formação em Robótica Industrial ROBÓTICA CAD / CAM PROGRAMA DE FORMAÇÃO AVEIRO DEZEMBRO DE 2016 1 / 6 1. NOTA PRÉVIA O programa de formação que apresentamos de seguida, reflecte
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Guia Rápido - CrossPalm 1.2
 Guia Rápido - CrossPalm 1.2 Tela Principal e Menus Esta é a tela principal do CrossPalm, nela temos o botão de inicio de navegação no canto inferior esquerdo e o botão de seleção de prova no canto inferior
Guia Rápido - CrossPalm 1.2 Tela Principal e Menus Esta é a tela principal do CrossPalm, nela temos o botão de inicio de navegação no canto inferior esquerdo e o botão de seleção de prova no canto inferior
Representação de Conhecimento
 em Sistemas baseados em Comportamentos: Mapas cognitivos : apenas locais relevantes Memória Comportamental de Curto-prazo: orientada para a acção baseada em grelhas resolução variada forma: rectangular
em Sistemas baseados em Comportamentos: Mapas cognitivos : apenas locais relevantes Memória Comportamental de Curto-prazo: orientada para a acção baseada em grelhas resolução variada forma: rectangular
Inteligência Artificial Agentes Inteligentes
 Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação jpn@jarley.com Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO.
 Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Inteligência Artificial
 Inteligência Artificial Exercícios da aula prática de Agentes 2011/12 1. Considere um agente num mundo em que existem 4 posições dispostas numa quadrícula 2X2. O agente tem dois sensores: um que indica
Inteligência Artificial Exercícios da aula prática de Agentes 2011/12 1. Considere um agente num mundo em que existem 4 posições dispostas numa quadrícula 2X2. O agente tem dois sensores: um que indica
Análise: smartphone InnJoo Max3 Pro LTE
 Análise: smartphone InnJoo Max3 Pro LTE Date : 17 de Dezembro de 2016 Durante as últimas semanas tivemos em análise um smartphone (ou phablet, como lhe queira chamar) da marca InnJoo, que claramente apostou
Análise: smartphone InnJoo Max3 Pro LTE Date : 17 de Dezembro de 2016 Durante as últimas semanas tivemos em análise um smartphone (ou phablet, como lhe queira chamar) da marca InnJoo, que claramente apostou
Instalação. Ajuste a distância entre o videoprojector e o ecrã até obter o tamanho de imagem pretendido. 20 cm. Tamanho do ecrã 300"
 Instalação Página 16 do Guia do Utilizador Ajuste a distância entre o videoprojector e o ecrã até obter o tamanho de imagem pretendido. Tamanho do ecrã 300" 200" 150" 120" 100" 80" Distância de projecção
Instalação Página 16 do Guia do Utilizador Ajuste a distância entre o videoprojector e o ecrã até obter o tamanho de imagem pretendido. Tamanho do ecrã 300" 200" 150" 120" 100" 80" Distância de projecção
PROGRAMANDO O ROBO LEGO
 PROGRAMANDO O ROBO LEGO APOITIA, CARLOS EDUARDO MOURA SALES, GLADISTONEY SANTOS GARCIA, LEONARDO ARRUDA VILELA OLIVEIRA, MÁRISON FIGUEIREDO Cuiabá (MT) np.robotica@unirondon.br 1. Introdução A Robótica
PROGRAMANDO O ROBO LEGO APOITIA, CARLOS EDUARDO MOURA SALES, GLADISTONEY SANTOS GARCIA, LEONARDO ARRUDA VILELA OLIVEIRA, MÁRISON FIGUEIREDO Cuiabá (MT) np.robotica@unirondon.br 1. Introdução A Robótica
Olimpíada Brasileira de Robótica /8
 1/8 1. O nome do robô abaixo é MAX-362. Ele adora se olhar no espelho e sempre se espanta com a imagem que vê! Isso porque seu nome aparece no espelho de um jeito diferente. (Fonte: Modificado de https://openclipart.org/detail/191072/blue-robot
1/8 1. O nome do robô abaixo é MAX-362. Ele adora se olhar no espelho e sempre se espanta com a imagem que vê! Isso porque seu nome aparece no espelho de um jeito diferente. (Fonte: Modificado de https://openclipart.org/detail/191072/blue-robot
DISCIPLINA: ESTAFETAS CONTEÚDOS PROGRAMÁTICOS
 ESTAFETAS 192 DOMÍNIO DAS TÉCNICAS III FASE - APERFEIÇOAMENTO TÉCNICO B FASES / NÍVEIS CONTEÚDOS PROGRAMÁTICOS I- Ensino / Aprendizagem - Aquisição da noção de transmissão, através de jogos. - Aquisição
ESTAFETAS 192 DOMÍNIO DAS TÉCNICAS III FASE - APERFEIÇOAMENTO TÉCNICO B FASES / NÍVEIS CONTEÚDOS PROGRAMÁTICOS I- Ensino / Aprendizagem - Aquisição da noção de transmissão, através de jogos. - Aquisição
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
o Descrever as diferentes fases da evolução da informática o Gerir e organizar sistemas de informação
 Departamento de Matemática e Ciências Experimentais Ano lectivo 2011/2012 Prof. Carla Granadeiro Curso de Educação e Formação (CEF) Tipo 3 Operador de Sistemas Informáticos Planificação Anual da disciplina
Departamento de Matemática e Ciências Experimentais Ano lectivo 2011/2012 Prof. Carla Granadeiro Curso de Educação e Formação (CEF) Tipo 3 Operador de Sistemas Informáticos Planificação Anual da disciplina
Dinâmica de Grupo em Agentes
 Dinâmica de Grupo em Agentes Rui Prada GAIPS, INESC-ID IST-UTL Sumário Introdução Grupos de Personagens Sintéticos Problemas e Limitações Caso de Estudo: Perfect Circle Modelo de Dinâmica de Grupo Sintética
Dinâmica de Grupo em Agentes Rui Prada GAIPS, INESC-ID IST-UTL Sumário Introdução Grupos de Personagens Sintéticos Problemas e Limitações Caso de Estudo: Perfect Circle Modelo de Dinâmica de Grupo Sintética