Retrofitting de Robôs. Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
|
|
|
- Diego Weber Madeira
- 6 Há anos
- Visualizações:
Transcrição
1 Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica 1

2 Introdução Robôs Manipuladores Robôs Industriais Móveis Rodas Pernas Esteiras 2
3 Introdução Pequenas e médias empresas não tem acesso à tecnologia de robótica devido aos altos custos Custos dos periféricos como módulos de I/O e de comunicação Custos da programação em linguagens dedicadas Grandes empresas estão trocando robôs velhos A mecânica dos robôs não tem mudado muito A eletrônica e o software pode ser atualizado para a tecnologia atual 3
4 Retrofitting de Robôs Revisão Mecânica Atualização Elétrica Substituição do Controlador Arquitetura Aberta Baseada em sistema distribuído Substituição do Software C++ e biblioteca de classes adequada Programação Off line 4
5 Mecânica do ASEA IRB6 Construído em juntas Totalmente desmontado Identificação das peças Limpeza Lubrificação Algumas peças substituídas 5


6 Desmontagem do Robô Instrumentação das juntas Motor D.C. Resolver Tacômetro Chave de fim de curso Frio eletromecânico 6





7 Desmontagem 7

8 Atualização Elétrica Controlador não operante Baseado em eletrônica analógica antiquadacs Esquemáticos não disponíveis Fonte reprojetada Resolvers e tacômetros substituídos por encoders incrementais 8

9 Arquitetura de Controle Arquitetura de controle desenvolvida pra o robô Janus 2 braços e cabeça de visão stereo 8 juntas/braço Nenhuma adaptação foi necessária para utilizar no ASEA IRB6 9
10 Arquitetura de Hardware Típica 10
11 Acionamento por PWM Digital Acionamento totalmente digital Freqüência do PWM pode ser programada 11
12 Pulse Width Modulation 12
cosA Processamento por demodulação Por amostragem")
13 Resolvers Sinal de excitação de 400Hz V1= Vsen(wt)senA V2= Vsen(wt)cosA Processamento por demodulação Por amostragem 13

14 Demodulação do Resolver 14

15 Encoder Óptico Incremental Permite altas resoluções Requer sensor de índice Decodificação em quadratura permite multiplicar por 4 a resolução do disco Contagem e decodificação deve ser feita por hardware 15

16 Arquitetura de Controle 16
17 Características da Arquitetura CAN utilizado para dados em tempo real Ethernet utilizada para dados de supervisão Interface como usuário executa em um PC A função das AIC é flexível Deve ler os sensores e acionar o motor Pode funcionar como um controlador local de juntas (PID) Pode funcionar como um processador de I/O 17
18 Actuator Interface Card (AIC) 18
19 Módulo Processador Módulo TINI da Dallas Semiconductor Processador Real time clock Interfaces CAN Ethernet RS 232 SIMM72 Pode ser substituída mantendo se o módulo de interface 19
20 Módulo de Interface Soquete SIMM72 para o módulo processador PWM com freqüência programável Ponte H com MOSFETs Decodificador em Quadratura para encoder Mutiplica por 4 a resolução do encoder Contador de 16 bits para acumular os pulsos entre leituras Interface para chave de fim de curso Interface para freio 20
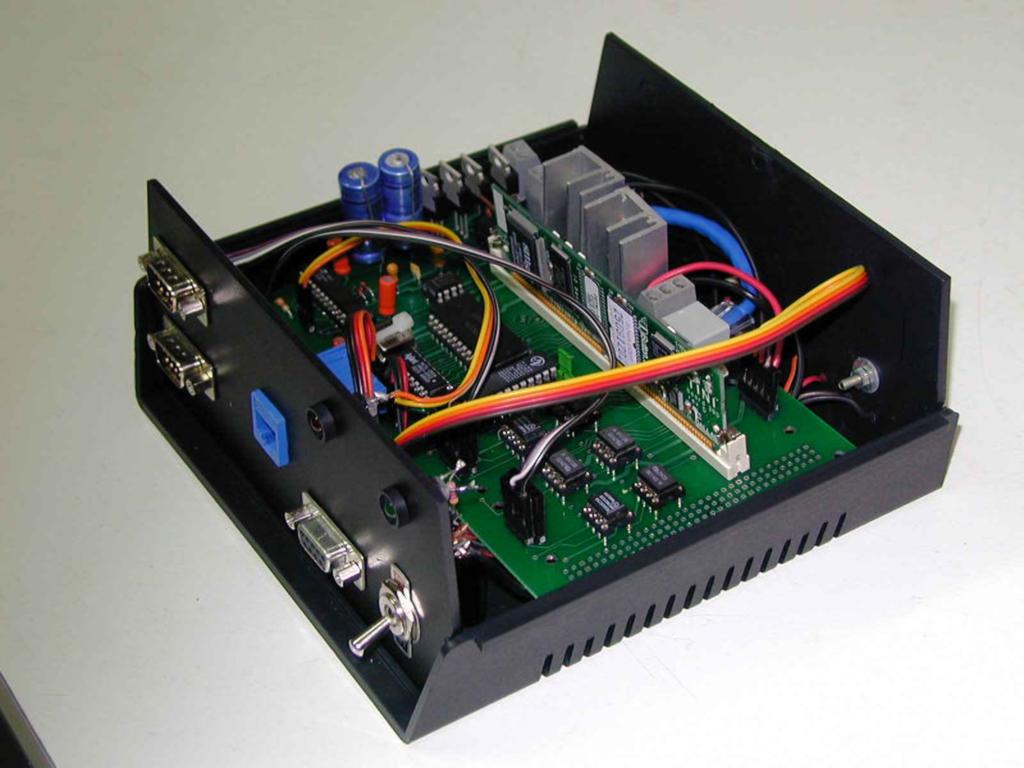
21 AIC 21
22 Software AIC executa um sistema operacional multitarefa Gerenciamento de memória e I/O Sistema de arquivos Pilha TCP/IP Máquina virtual Java Shell Unix like Servidores de TELNET, FTP e console serial Cliente DHCP 22
23 Pacote Java AIC br/ufrgs/eletro/aic Classes para modelar os dispositivos conectados à AIC PWM, Motor, Encoder, Brake, Index Métodos públicos para suportar as operações possíveis Brake.apply(), Brake.release() Motor.on(), Motor.off(), Motor.set(double voltage) A classe Host abstrai a comunicação HostCAN, HostUDP Métodos críticos implementados em Assembly como métodos nativos 23
24 Daemon AIC Usa o pacote AIC e implementa os serviços da AIC Controlador local de junta Processador de I/O Carregado na AIC por FTP Disparado pelos scripts de inicialização AIC possui memória não volátil, portanto o daemon está pronto assim que a a AIC é ligada 24
25 AIC Daemon Utilizado no ASEA IRB6 Implementa um processador de I/O Programa Java Multi threaded A thread principal trata os argumentos e dispara duas outras threads SendSensors Envia a leitura dos sensores a cada 10ms GetCommand Recebe comandos do host e executa os 25
26 Software do Host Biblioteca AIC em C++, semelhante em estrutura ao pacote Java AIC Classes para modelar Motor, Encoder, Freio e Índice Classe AIC derivada para AIC_CAN e AIC_UDP Detalhes de comunicação encapsulados Programador não necessita estar consciente da arquitetura distribuída Classes e métodos são similares aos existentes nas AICs mas implementados em C++ ao invés de Java 26
27 Software do Host C++ é melhor para controle avançado do que Java A teoria de controle moderno e o controle de robôs em particular é baseado em álgebra matricial C++ supporta sobrecarga operadores Bibliotecas de manipulação de matrizes podem ser construidas de forma bastante conveniente O Host executa RTAI Não há suporte para execução de Java em tempo real Real time java não é tão madura quanto POSIX 27
28 Esquema de Controle 28
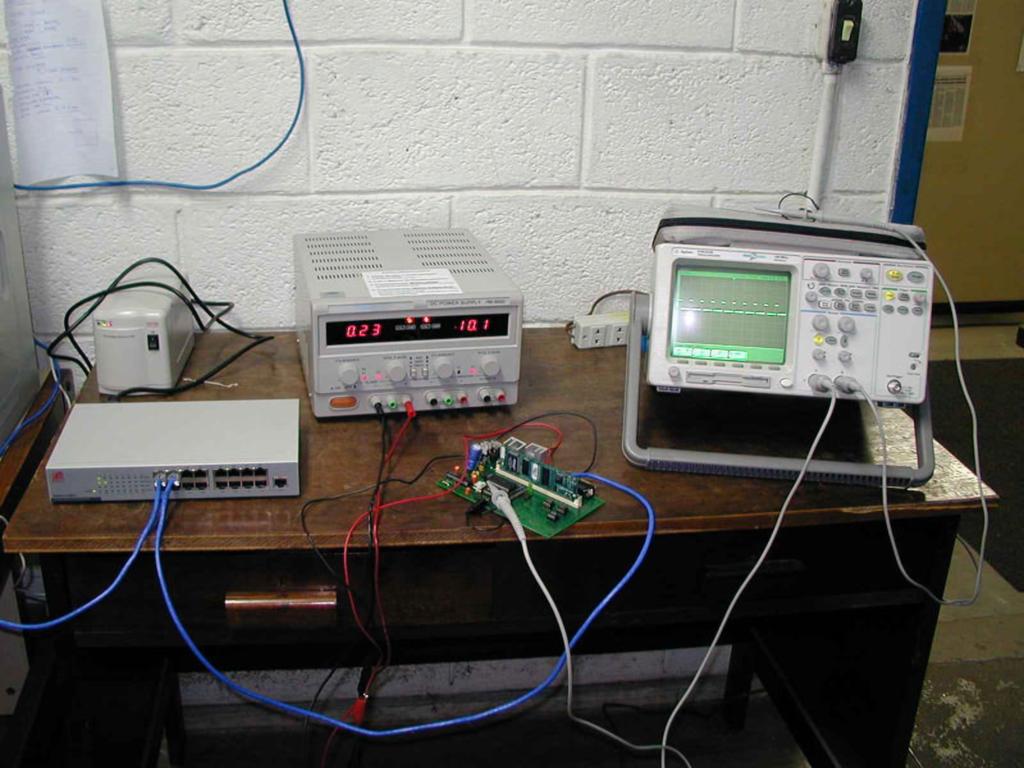
29 Experimentos 29


30 Experimentos 30
31 Resposta do Controlador 31
32 Resposta do Controlador com Baixo Tráfego 32

33 Resposta do Controlador com Alto Tráfego 33
34 Conclusão Retrofitting de robôs antigos pode ser realizado com excelentes resultados Um robô de arquitetura abertas pode ser obtido por uma fração do custo de um robô novo A aquitetura proposta é bastante flexível Possíveis extensões Sensores de força/torque (em desenvolvimento) Motores AC Programação de robôs em C++ é mais barata e mais conveniente do que em linguagens dedicadas 34
35 Vídeos AICs J13 J45 J
36 Agradecimentos Este trabalho foi financiado em parte por: FAPERGS Processo 01/05670 FAPEMIG Processo TEC 2471/98 RECOPE/MANET 36
Instrumentos Analógicos e Digitais
 Instrumentos Analógicos e Digitais Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em
Instrumentos Analógicos e Digitais Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA
 CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10032 Microcontroladores
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10032 Microcontroladores 1 Objetivo Roteiro de Laboratório 6 Pulse-Width-Modulation
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10032 Microcontroladores 1 Objetivo Roteiro de Laboratório 6 Pulse-Width-Modulation
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Introdução ao LabVIEW para Robótica
 Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
Conversores A/D e D/A
 Conversores A/D e D/A Walter Fetter Lages w.fetter@ieee.org Universidade Federal do io Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em Engenharia Elétrica
Conversores A/D e D/A Walter Fetter Lages w.fetter@ieee.org Universidade Federal do io Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em Engenharia Elétrica
Informática I. Aula 19. http://www.ic.uff.br/~bianca/informatica1/ Aula 19-20/06/06 1
 Informática I Aula 19 http://www.ic.uff.br/~bianca/informatica1/ Aula 19-20/06/06 1 Ementa Histórico dos Computadores Noções de Hardware e Software Microprocessadores Sistemas Numéricos e Representação
Informática I Aula 19 http://www.ic.uff.br/~bianca/informatica1/ Aula 19-20/06/06 1 Ementa Histórico dos Computadores Noções de Hardware e Software Microprocessadores Sistemas Numéricos e Representação
AULA 9 ATUADORES ELÉTRICOS
 AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
ezap 900 Controlador Lógico Programável ezap900/901 Diagrama esquemático Apresentação Módulo ZMB900 - Características Gerais Dados Técnicos
 Caixa Aço carbono zincado Grau de proteção IP20 Dimensões 98 (L) x 98 (A) x 125 (P) mm Diagrama esquemático Apresentação A família de controladores lógicos programáveis ZAP900 foi desenvolvida para atender
Caixa Aço carbono zincado Grau de proteção IP20 Dimensões 98 (L) x 98 (A) x 125 (P) mm Diagrama esquemático Apresentação A família de controladores lógicos programáveis ZAP900 foi desenvolvida para atender
ü Na década de 1920 os dispositivos mecânicos foram substituídos pelos relés; ü O uso da lógica de relés dificultava modificações do processo;
 O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
Introdução à Plataforma ARDUINO
 MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
Introdução à robótica
 Núcleo de Robótica e Sistemas Cibernéticos Ensino pesquisa e extensão em robótica educacional e cibernética. Introdução à robótica Objetivo da aula 7: Entender o funcionamento de um controlador ou processador
Núcleo de Robótica e Sistemas Cibernéticos Ensino pesquisa e extensão em robótica educacional e cibernética. Introdução à robótica Objetivo da aula 7: Entender o funcionamento de um controlador ou processador
Arquiteturas de Software
 Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Desenvolvendo Sistemas de Aquisição, Análise e Apresentação de Dados com LabVIEW
 Desenvolvendo Sistemas de Aquisição, Análise e Apresentação de Dados com LabVIEW Jailton Dias Engenheiro de Aplicação de Campo National Instruments Brazil Agenda Introdução à Instrumentação Virtual e a
Desenvolvendo Sistemas de Aquisição, Análise e Apresentação de Dados com LabVIEW Jailton Dias Engenheiro de Aplicação de Campo National Instruments Brazil Agenda Introdução à Instrumentação Virtual e a
Apresentação. Ementa da Disciplina. Objetivo da Disciplina. DCA-108 Sistemas Operacionais. Referências Bibliográfica. Referências Bibliográfica
 DCA-108 Sistemas Operacionais Luiz Affonso Guedes www.dca.ufrn.br/~affonso affonso@dca.ufrn.br Apresentação Disciplina básica do curso de Engenharia de Computação Carga-horária: 60h teóricas Associadas
DCA-108 Sistemas Operacionais Luiz Affonso Guedes www.dca.ufrn.br/~affonso affonso@dca.ufrn.br Apresentação Disciplina básica do curso de Engenharia de Computação Carga-horária: 60h teóricas Associadas
SSC510 Arquitetura de Computadores 1ª AULA
 SSC510 Arquitetura de Computadores 1ª AULA REVISÃO DE ORGANIZAÇÃO DE COMPUTADORES Arquitetura X Organização Arquitetura - Atributos de um Sistema Computacional como visto pelo programador, isto é a estrutura
SSC510 Arquitetura de Computadores 1ª AULA REVISÃO DE ORGANIZAÇÃO DE COMPUTADORES Arquitetura X Organização Arquitetura - Atributos de um Sistema Computacional como visto pelo programador, isto é a estrutura
Organização e Arquitetura de Computadores I
 Organização e Arquitetura de Computadores I Entrada e Saída Slide 1 Entrada e Saída Dispositivos Externos E/S Programada Organização e Arquitetura de Computadores I Sumário E/S Dirigida por Interrupção
Organização e Arquitetura de Computadores I Entrada e Saída Slide 1 Entrada e Saída Dispositivos Externos E/S Programada Organização e Arquitetura de Computadores I Sumário E/S Dirigida por Interrupção
Algoritmos Computacionais
 UNIDADE 1 Processador e instruções Memórias Dispositivos de Entrada e Saída Software ARQUITETURA BÁSICA UCP Unidade central de processamento MEM Memória E/S Dispositivos de entrada e saída UCP UNIDADE
UNIDADE 1 Processador e instruções Memórias Dispositivos de Entrada e Saída Software ARQUITETURA BÁSICA UCP Unidade central de processamento MEM Memória E/S Dispositivos de entrada e saída UCP UNIDADE
Montagem do Robô. Especificações. domingo, 28 de agosto de 11
 Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Redes para Automação Industrial. Capítulo 1: Automação Industrial. Luiz Affonso Guedes DCA-CT-UFRN
 Redes para Automação Industrial Capítulo 1: Automação Industrial Luiz Affonso Guedes DCA-CT-UFRN 2005.1 Objetivos do Capítulo Estudo sistêmico de sistemas de automação industrial. Caracterização dos elementos
Redes para Automação Industrial Capítulo 1: Automação Industrial Luiz Affonso Guedes DCA-CT-UFRN 2005.1 Objetivos do Capítulo Estudo sistêmico de sistemas de automação industrial. Caracterização dos elementos
Sistemas Operacionais. Visão Geral
 Sistemas Operacionais P R O F. B R U N O A L B U Q U E R Q U E S C R I G N O L I Visão Geral Organização da Apresentação Introdução Componentes de um Sistema de Computação Conceito de SO Objetivos de um
Sistemas Operacionais P R O F. B R U N O A L B U Q U E R Q U E S C R I G N O L I Visão Geral Organização da Apresentação Introdução Componentes de um Sistema de Computação Conceito de SO Objetivos de um
PLACA MÃE COMPONENTES BÁSICOS BIOS
 PLACA MÃE COMPONENTES BÁSICOS BIOS COMPONENTES BÁSICOS BARRAMENTO FREQÜÊNCIA GERADOR DE CLOCK MEMÓRIA ROM FIRMWARE BIOS POST SETUP CMOS RTC BATERIA CHIPSET MEMÓRIA SL SLOTS DE EXPANSÃO CACHE SOQUETES PARA
PLACA MÃE COMPONENTES BÁSICOS BIOS COMPONENTES BÁSICOS BARRAMENTO FREQÜÊNCIA GERADOR DE CLOCK MEMÓRIA ROM FIRMWARE BIOS POST SETUP CMOS RTC BATERIA CHIPSET MEMÓRIA SL SLOTS DE EXPANSÃO CACHE SOQUETES PARA
HARDWARE DOS RELÉS NUMÉRICOS
 HARDWARE DOS RELÉS NUMÉRICOS 1. CONSIDERAÇÕES INICIAIS Objetivos idênticos ao hardware dos relés convencionais, ou seja, recebem sinais analógicos de tensão, corrente e outros, sinais digitais de contatos
HARDWARE DOS RELÉS NUMÉRICOS 1. CONSIDERAÇÕES INICIAIS Objetivos idênticos ao hardware dos relés convencionais, ou seja, recebem sinais analógicos de tensão, corrente e outros, sinais digitais de contatos
Sistemas Operacionais (SO)
") Sistemas Operacionais (SO) Fundamentos Prof. Eduardo Abordagens SO Moderno (importância) Funções básicas Definição Componentes de um SC Objetivos de um SO Serviços de um SO Abstrações Tipos de SO Estudo
Sistemas Operacionais (SO) Fundamentos Prof. Eduardo Abordagens SO Moderno (importância) Funções básicas Definição Componentes de um SC Objetivos de um SO Serviços de um SO Abstrações Tipos de SO Estudo
Informática Básica CONCEITOS DE HARDWARE. Msc. Eliezio Soares
 Informática Básica CONCEITOS DE HARDWARE Msc. Eliezio Soares eliezio.soares@ifrn.edu.br http://docente.ifrn.edu.br/elieziosoares Sistema de Computação Um sistema é definido como um conjunto de partes coordenadas
Informática Básica CONCEITOS DE HARDWARE Msc. Eliezio Soares eliezio.soares@ifrn.edu.br http://docente.ifrn.edu.br/elieziosoares Sistema de Computação Um sistema é definido como um conjunto de partes coordenadas
Sistemas Digitais EDUARDO ELIAS ALVES PEREIRA
 Sistemas Digitais EDUARDO ELIAS ALVES PEREIRA Sistemas Digitais Agenda Arduino Tipos, detalhes; Esquema elétrico. IDEs Eagle; ATMel Studio; Arduino Studio; Circuits IO (Simulador). Arduino Arduino MEGA2560
Sistemas Digitais EDUARDO ELIAS ALVES PEREIRA Sistemas Digitais Agenda Arduino Tipos, detalhes; Esquema elétrico. IDEs Eagle; ATMel Studio; Arduino Studio; Circuits IO (Simulador). Arduino Arduino MEGA2560
Desenvolvendo aplicações com LabVIEW FPGA. Rogério Rodrigues Engenheiro de Marketing Técnico Marcos Cardoso Engenheiro de Vendas
 Desenvolvendo aplicações com LabVIEW FPGA Rogério Rodrigues Engenheiro de Marketing Técnico Marcos Cardoso Engenheiro de Vendas Agenda O que são FPGAs e por que eles são úteis? Programando FPGAs Hardware
Desenvolvendo aplicações com LabVIEW FPGA Rogério Rodrigues Engenheiro de Marketing Técnico Marcos Cardoso Engenheiro de Vendas Agenda O que são FPGAs e por que eles são úteis? Programando FPGAs Hardware
14/3/2016. Prof. Evandro L. L. Rodrigues
 SEL 433 APLICAÇÕES DE MICROPROCESSADORES I SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Prof. Evandro L. L. Rodrigues Tópicos do curso Conceitos básicos - Aplicações e utilizações dos microcontroladores
SEL 433 APLICAÇÕES DE MICROPROCESSADORES I SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Prof. Evandro L. L. Rodrigues Tópicos do curso Conceitos básicos - Aplicações e utilizações dos microcontroladores
Capítulo 2. Multiprogramação. Conteúdo. Objetivo. Recordando. Recordando. DCA-108 Sistemas Operacionais
 DCA-108 Sistemas Operacionais Capítulo 2 Luiz Affonso Guedes www.dca.ufrn.br/~affonso affonso@dca.ufrn.br Multiprogramação Luiz Affonso Guedes 1 Luiz Affonso Guedes 2 Conteúdo Caracterização de um SO Moderno
DCA-108 Sistemas Operacionais Capítulo 2 Luiz Affonso Guedes www.dca.ufrn.br/~affonso affonso@dca.ufrn.br Multiprogramação Luiz Affonso Guedes 1 Luiz Affonso Guedes 2 Conteúdo Caracterização de um SO Moderno
ÍNDICE. Sobre o Livro Sobre o Autor Agradecimentos Nota à 5.ª Edição Prefácio à 1.ª Edição. Capítulo 1 Sistemas de Produção Modernos
 ÍNDICE Sobre o Livro Sobre o Autor Agradecimentos Nota à 5.ª Edição Prefácio à 1.ª Edição Capítulo 1 Sistemas de Produção Modernos 1.1 Introdução 1.2 Equipamentos 1.3 Robôs 1.4 Sistemas de Armazenamento
ÍNDICE Sobre o Livro Sobre o Autor Agradecimentos Nota à 5.ª Edição Prefácio à 1.ª Edição Capítulo 1 Sistemas de Produção Modernos 1.1 Introdução 1.2 Equipamentos 1.3 Robôs 1.4 Sistemas de Armazenamento
INTRODUÇÃO: MICROCONTROLADORES
 INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
Primeiro Ano/Trimestre 2 Carga horária total: 135 h (Eletivas)
") Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Mestrado Profissional em Mecatrônica CÂMPUS FLORIANÓPOLIS MATRIZ CURRICULAR Primeiro Ano/Trimestre
Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Mestrado Profissional em Mecatrônica CÂMPUS FLORIANÓPOLIS MATRIZ CURRICULAR Primeiro Ano/Trimestre
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO
 Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO PROXSYS Versão 1.3 Abril -2015 Controlador Industrial CP-WS1 1- Configurações
Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO PROXSYS Versão 1.3 Abril -2015 Controlador Industrial CP-WS1 1- Configurações
Técnicas Avançadas de Programação
 Sumário Técnicas Avançadas de Programação Prof. João Marcos M. da Silva Departamento de Engenharia de Telecomunicações Escola de Engenharia Universidade Federal Fluminense Agosto de 2011 Prof. João Marcos
Sumário Técnicas Avançadas de Programação Prof. João Marcos M. da Silva Departamento de Engenharia de Telecomunicações Escola de Engenharia Universidade Federal Fluminense Agosto de 2011 Prof. João Marcos
INTRODUÇÃO À ARQUITETURA E ORGANIZAÇÃO DE COMPUTADORES. Função e Estrutura. Introdução Organização e Arquitetura. Organização e Arquitetura
 Introdução Organização e Arquitetura INTRODUÇÃO À ARQUITETURA E ORGANIZAÇÃO DE COMPUTADORES Eduardo Max Amaro Amaral Arquitetura são os atributos visíveis ao programador. Conjunto de instruções, número
Introdução Organização e Arquitetura INTRODUÇÃO À ARQUITETURA E ORGANIZAÇÃO DE COMPUTADORES Eduardo Max Amaro Amaral Arquitetura são os atributos visíveis ao programador. Conjunto de instruções, número
Unidade 2. Processos Threads Concorrência em Java
 Unidade 2 Programação Concorrente Processos Threads Concorrência em Java Processos Definição Um programa em execução em uma máquina. Identificado pelo seu PID (Process Identifier). A unidade de processamento
Unidade 2 Programação Concorrente Processos Threads Concorrência em Java Processos Definição Um programa em execução em uma máquina. Identificado pelo seu PID (Process Identifier). A unidade de processamento
ARQUITETURA DE COMPUTADORES
 ARQUITETURA DE COMPUTADORES Arquitetura de Von Newmann Prof Daves Martins Msc Computação de Alto Desempenho Email: daves.martins@ifsudestemg.edu.br Vídeos Vídeo aula RNP http://edad.rnp.br/rioflashclient.php?xmlfile=/ufjf/licenciatura_com
ARQUITETURA DE COMPUTADORES Arquitetura de Von Newmann Prof Daves Martins Msc Computação de Alto Desempenho Email: daves.martins@ifsudestemg.edu.br Vídeos Vídeo aula RNP http://edad.rnp.br/rioflashclient.php?xmlfile=/ufjf/licenciatura_com
Automação. 4 de fevereiro de Prof. Ramon Moreira Lemos
 Automação 4 de fevereiro de 2016 O que é automação? Engenharia de automação é o estudo das técnicas que visam otimizar um processo de negócio, aumentando sua produtividade, promovendo a valorização da
Automação 4 de fevereiro de 2016 O que é automação? Engenharia de automação é o estudo das técnicas que visam otimizar um processo de negócio, aumentando sua produtividade, promovendo a valorização da
Processos Concorrentes
 Processos Concorrentes Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04008 Sistemas de Tempo Real Copyright
Processos Concorrentes Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04008 Sistemas de Tempo Real Copyright
Programação de Computadores I - PRG1 Engenharia Elétrica
 Programação de Computadores I - PRG1 Engenharia Elétrica Edilson Hipolito da Silva edilson.hipolito@ifsc.edu.br - http://www.hipolito.info Aula 03 - Conceitos: Hardware, Software, Sistema Operacional Roteiro
Programação de Computadores I - PRG1 Engenharia Elétrica Edilson Hipolito da Silva edilson.hipolito@ifsc.edu.br - http://www.hipolito.info Aula 03 - Conceitos: Hardware, Software, Sistema Operacional Roteiro
LAB4 Introdução aos Controladores Lógicos Programáveis
 LAB4 Introdução aos Controladores Lógicos Programáveis 4.1 Introdução Os Controladores Lógicos Programáveis (CLPs) são dispositivos digitais, muito utilizados na indústria, capazes de armazenar instruções
LAB4 Introdução aos Controladores Lógicos Programáveis 4.1 Introdução Os Controladores Lógicos Programáveis (CLPs) são dispositivos digitais, muito utilizados na indústria, capazes de armazenar instruções
Introdução à Computação
 Introdução à Computação Jordana Sarmenghi Salamon jssalamon@inf.ufes.br jordanasalamon@gmail.com http://inf.ufes.br/~jssalamon Departamento de Informática Universidade Federal do Espírito Santo Agenda
Introdução à Computação Jordana Sarmenghi Salamon jssalamon@inf.ufes.br jordanasalamon@gmail.com http://inf.ufes.br/~jssalamon Departamento de Informática Universidade Federal do Espírito Santo Agenda
Ivinhema-MS. Prof. Esp. Carlos Roberto das Virgens.
 1 Ivinhema-MS Prof. Esp. Carlos Roberto das Virgens www.carlosrobertodasvirgens.wikispaces.com NOÇOES BÁSICAS DE PERIFÉRICOS E ARQUITETURA DOS COMPUTADORES. Um sistema de informações é um conjunto de componentes
1 Ivinhema-MS Prof. Esp. Carlos Roberto das Virgens www.carlosrobertodasvirgens.wikispaces.com NOÇOES BÁSICAS DE PERIFÉRICOS E ARQUITETURA DOS COMPUTADORES. Um sistema de informações é um conjunto de componentes
ZAP 900. Controlador Lógico Programável ZAP900/901. Diagrama esquemático. Apresentação. Módulo ZMB900 - Características Gerais. Dados Técnicos.
 Diagrama esquemático Usuário Processo Display 2x16 (*1) Teclado com 15 teclas (*1) Entradas Digitais Saídas Digitais Módulo ZMB900 Apresentação A família de controladores lógicos programáveis ZAP900 foi
Diagrama esquemático Usuário Processo Display 2x16 (*1) Teclado com 15 teclas (*1) Entradas Digitais Saídas Digitais Módulo ZMB900 Apresentação A família de controladores lógicos programáveis ZAP900 foi
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
INTRODUÇÃO A SISTEMAS OPERACIONAIS
 INTRODUÇÃO A SISTEMAS OPERACIONAIS Prof. Me. Hélio Esperidião DEFINIÇÃO DE SISTEMA OPERACIONAL. O sistema operacional é uma camada de software colocada sobre o hardware para gerenciar todos os componentes
INTRODUÇÃO A SISTEMAS OPERACIONAIS Prof. Me. Hélio Esperidião DEFINIÇÃO DE SISTEMA OPERACIONAL. O sistema operacional é uma camada de software colocada sobre o hardware para gerenciar todos os componentes
ou
 Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais que auxiliam na implementação de aplicações
Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais que auxiliam na implementação de aplicações
Projeto Lógico de Computadores. Profa. MSc. Carolina Melo Santana
 Projeto Lógico de Computadores Profa. MSc. Carolina Melo Santana karolstana@yahoo.com.br Nível de Máquina de Sistema Operacional Dinâmica: Batata quente Perguntas a serem respondidas pelos alunos que estiverem
Projeto Lógico de Computadores Profa. MSc. Carolina Melo Santana karolstana@yahoo.com.br Nível de Máquina de Sistema Operacional Dinâmica: Batata quente Perguntas a serem respondidas pelos alunos que estiverem
Natureza - OBRIGTEÓRICA
 1 de 5 01 CON101 - Algorítmos e Programação - Ativa desde: CON102 - Cálculo I - Ativa desde: 16/11/2007 CON103 - Comunicação e Produção Técnico-Científica - Ativa desde: 16/11/2007 CON104 - Expressão Gráfica
1 de 5 01 CON101 - Algorítmos e Programação - Ativa desde: CON102 - Cálculo I - Ativa desde: 16/11/2007 CON103 - Comunicação e Produção Técnico-Científica - Ativa desde: 16/11/2007 CON104 - Expressão Gráfica
PMR5229 Projeto de Sistemas Mecatrônicos com Microprocessadores. Prof. Jun Okamoto Jr. sala ES-05 Tel:
 PMR5229 Projeto de Sistemas Mecatrônicos com Microprocessadores Prof. Jun Okamoto Jr. sala ES-05 Tel: 3091-5516 E-mail: jokamoto@usp.br Sistemas Mecatrônicos? Não Sistemas Mecatrônicos? Sim mas não interessam
PMR5229 Projeto de Sistemas Mecatrônicos com Microprocessadores Prof. Jun Okamoto Jr. sala ES-05 Tel: 3091-5516 E-mail: jokamoto@usp.br Sistemas Mecatrônicos? Não Sistemas Mecatrônicos? Sim mas não interessam
Profª Danielle Casillo
 UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Aula 05 Introdução ao CLP Profª Danielle Casillo CONTROLADOR LÓGICO PROGRAMÁVEL -CLP 2 CONTROLADOR LÓGICO PROGRAMÁVEL
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Aula 05 Introdução ao CLP Profª Danielle Casillo CONTROLADOR LÓGICO PROGRAMÁVEL -CLP 2 CONTROLADOR LÓGICO PROGRAMÁVEL
INFORMAÇÕES ADICIONAIS
 INFORMAÇÕES ADICIONAIS 1) Montadora: AGCO do Brasil Máquinas e Equipamento Ltda. 2) n Item: VALTRA_08 3) NCM: 85371020 4) Proposta de descrição da autopeça: Controladores eletrônicos dotado de processador,
INFORMAÇÕES ADICIONAIS 1) Montadora: AGCO do Brasil Máquinas e Equipamento Ltda. 2) n Item: VALTRA_08 3) NCM: 85371020 4) Proposta de descrição da autopeça: Controladores eletrônicos dotado de processador,
Real Time Clock MC146818A,DS12C887
 Real Time Clock MC146818A,DS12C887 Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Microprocessadores II Copyright
Real Time Clock MC146818A,DS12C887 Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Microprocessadores II Copyright
Motor DC. Acionamento de Motor DC. Motor DC. Acionamento de Motor DC. Acionamento de Motor DC. Construção. Funcionamento. Sinais de controle do L298
 PMR2415 Microprocessadores em Automação e Robótica Acionamento de motores Construção Motor DC Jun Okamoto Jr. Funcionamento Motor DC Acionamento de Motor DC Acionamento por Ponte H A B C D State A B C
PMR2415 Microprocessadores em Automação e Robótica Acionamento de motores Construção Motor DC Jun Okamoto Jr. Funcionamento Motor DC Acionamento de Motor DC Acionamento por Ponte H A B C D State A B C
CP Introdução à Informática Prof. Msc. Carlos de Salles
 CP 1015.1 Prof. Msc. Carlos de Salles PROGRAMA 1. CONCEITO DE SISTEMAS 1.1 Sistemas e sua classificação 1.2 Informações e Dados 1.3 O Processamento de Dados 1.4 O Computador e sua História 2. ESTRUTURA
CP 1015.1 Prof. Msc. Carlos de Salles PROGRAMA 1. CONCEITO DE SISTEMAS 1.1 Sistemas e sua classificação 1.2 Informações e Dados 1.3 O Processamento de Dados 1.4 O Computador e sua História 2. ESTRUTURA
Matéria: Sistema Computacional - SC. Prof.: Esp.: Patrícia Dias da Silva Peixoto
 Matéria: Sistema Computacional - SC Prof.: Esp.: Patrícia Dias da Silva Peixoto SISTEMA OPERACIONAL E TIPOS DE SISTEMAS OPERACIONAIS O QUE É UM SISTEMA OPERACIONAL (S.O.). Por mais complexo que possa parecer,
Matéria: Sistema Computacional - SC Prof.: Esp.: Patrícia Dias da Silva Peixoto SISTEMA OPERACIONAL E TIPOS DE SISTEMAS OPERACIONAIS O QUE É UM SISTEMA OPERACIONAL (S.O.). Por mais complexo que possa parecer,
António Costa. Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Preâmbulo Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti Computação Gráfica Modelos Matemáticos Análise (reconhecimento de
Introdução à Computação Gráfica Preâmbulo Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti Computação Gráfica Modelos Matemáticos Análise (reconhecimento de
INE 5645 Programação Paralela e Distribuída
 INE 5645 Programação Paralela e Distribuída Prof. João Bosco M. Sobral INE - UFSC bosco@inf.ufsc.br Urian K. Bardemaker PPGCC - INE - UFSC uriank@gmail.com Unidade 2 Programação Concorrente Processos Threads
INE 5645 Programação Paralela e Distribuída Prof. João Bosco M. Sobral INE - UFSC bosco@inf.ufsc.br Urian K. Bardemaker PPGCC - INE - UFSC uriank@gmail.com Unidade 2 Programação Concorrente Processos Threads
SISTEMA PARA ESTUDO E TREINAMENTO NO ACIONAMENTO DE MÁQUINAS ELÉTRICAS COM INVERSOR DE FREQUÊNCIA E AQUISIÇÃO DE DADOS
 DLB MAQCA 1893 SISTEMA PARA ESTUDO E TREINAMENTO NO ACIONAMENTO DE MÁQUINAS ELÉTRICAS COM INVERSOR DE FREQUÊNCIA E AQUISIÇÃO DE DADOS Este conjunto didático de equipamentos foi idealizado para possibilitar
DLB MAQCA 1893 SISTEMA PARA ESTUDO E TREINAMENTO NO ACIONAMENTO DE MÁQUINAS ELÉTRICAS COM INVERSOR DE FREQUÊNCIA E AQUISIÇÃO DE DADOS Este conjunto didático de equipamentos foi idealizado para possibilitar
Benefícios de um CLP:
 Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
AULA 03: FUNCIONAMENTO DE UM COMPUTADOR
 ORGANIZAÇÃO E ARQUITETURA DE COMPUTADORES I AULA 03: FUNCIONAMENTO DE UM COMPUTADOR Prof. Max Santana Rolemberg Farias max.santana@univasf.edu.br Colegiado de Engenharia de Computação O QUE É UM COMPUTADOR?
ORGANIZAÇÃO E ARQUITETURA DE COMPUTADORES I AULA 03: FUNCIONAMENTO DE UM COMPUTADOR Prof. Max Santana Rolemberg Farias max.santana@univasf.edu.br Colegiado de Engenharia de Computação O QUE É UM COMPUTADOR?
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
INTRODUÇÃO À TECNOLOGIA DA INFORMAÇÃO O SISTEMA OPERACIONAL PROFESSOR CARLOS MUNIZ
 INTRODUÇÃO À TECNOLOGIA DA PROFESSOR CARLOS MUNIZ O QUE É UM SISTEMA OPERACIONAL? Há muitos tipos de Sistemas Operacionais, cuja complexidade varia e depende de que tipo de funções é provido, e para que
INTRODUÇÃO À TECNOLOGIA DA PROFESSOR CARLOS MUNIZ O QUE É UM SISTEMA OPERACIONAL? Há muitos tipos de Sistemas Operacionais, cuja complexidade varia e depende de que tipo de funções é provido, e para que
AUTOMAÇÃO DA PRODUÇÃO. Prof. Dr. Roger Nabeyama Michels
 AUTOMAÇÃO DA PRODUÇÃO Prof. Dr. Roger Nabeyama Michels INTRODUÇÃO, CONCEITO E HISTÓRIA DA AUTOMAÇÃO INDUSTRIAL Prof. Dr. Roger Nabeyama Michels Todos o desenvolvimento na área da Automação Industrial tem
AUTOMAÇÃO DA PRODUÇÃO Prof. Dr. Roger Nabeyama Michels INTRODUÇÃO, CONCEITO E HISTÓRIA DA AUTOMAÇÃO INDUSTRIAL Prof. Dr. Roger Nabeyama Michels Todos o desenvolvimento na área da Automação Industrial tem
SSC0611 Arquitetura de Computadores
 SSC0611 Arquitetura de Computadores 6ª Aula Entrada e Saída Profa. Sarita Mazzini Bruschi sarita@icmc.usp.br Estrutura da máquina de von Neumann Dispositivos Periféricos Interface com o mundo exterior
SSC0611 Arquitetura de Computadores 6ª Aula Entrada e Saída Profa. Sarita Mazzini Bruschi sarita@icmc.usp.br Estrutura da máquina de von Neumann Dispositivos Periféricos Interface com o mundo exterior
ANEXO: ESTRUTURA CURRICULAR DO CURSO DE ENGENHARIA ELÉTRICA DA UFCG
 ANEXO: ESTRUTURA CURRICULAR DO CURSO DE ENGENHARIA ELÉTRICA DA UFCG I. CONTEÚDOS BÁSICOS (Carga horária de 1740 horas) 1.1 - FORMAÇÃO CIENTÍFICA E TECNOLÓGICA (Carga horária: 1425 horas) 1.1.1 - MATEMÁTICA
ANEXO: ESTRUTURA CURRICULAR DO CURSO DE ENGENHARIA ELÉTRICA DA UFCG I. CONTEÚDOS BÁSICOS (Carga horária de 1740 horas) 1.1 - FORMAÇÃO CIENTÍFICA E TECNOLÓGICA (Carga horária: 1425 horas) 1.1.1 - MATEMÁTICA
As Tabelas 4 a 9 apresentam todas as disciplinas que atenderão ao Curso de EE. Tabela 4. Disciplinas obrigatórias C. H. (h.a.)
") As Tabelas 4 a 9 apresentam todas as disciplinas que atenderão ao Curso de EE. Tabela 4. obrigatórias Semestre Cálculo I 6 Elementos de Gestão Ambiental 2 Física I 6 1 Geometria Analítica 4 Introdução
As Tabelas 4 a 9 apresentam todas as disciplinas que atenderão ao Curso de EE. Tabela 4. obrigatórias Semestre Cálculo I 6 Elementos de Gestão Ambiental 2 Física I 6 1 Geometria Analítica 4 Introdução
FORMULÁRIO 2 : MATRIZ CURRICULAR CURSO: ENGENHARIA ELÉTRICA ATIVIDADES ACADÊMICAS INTEGRANTES DO CURSO
 1º 2º 3º 4º 5º DCC003 ALGORITMOS E ESTRUTURA DE DADOS I M DIS 4 60 60 0 OB OB OB OB OB OB EEE001 INTRODUÇÃO À ENGENHARIA ELÉTRICA M DIS 1 15 15 0 OB OB OB OB OB OB EEEnn1 INTRODUÇÃO AO PROJETO DE ENGENHARIA
1º 2º 3º 4º 5º DCC003 ALGORITMOS E ESTRUTURA DE DADOS I M DIS 4 60 60 0 OB OB OB OB OB OB EEE001 INTRODUÇÃO À ENGENHARIA ELÉTRICA M DIS 1 15 15 0 OB OB OB OB OB OB EEEnn1 INTRODUÇÃO AO PROJETO DE ENGENHARIA
Training Box Duo Mini Curso.
 Training Box Duo Mini Curso www.altus.com.br 1 Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais
Training Box Duo Mini Curso www.altus.com.br 1 Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais
Sistema Shaftless para Máquinas Gráficas
 Sistema Shaftless para Máquinas Gráficas Seguindo uma tendência mundial no segmento da indústria gráfica, a Yaskawa desenvolve no Brasil o primeiro sistema Shaftless Servoacionado. O termo Shaftless em
Sistema Shaftless para Máquinas Gráficas Seguindo uma tendência mundial no segmento da indústria gráfica, a Yaskawa desenvolve no Brasil o primeiro sistema Shaftless Servoacionado. O termo Shaftless em
DISPOSITIVOS LÓGICOS PROGRAMÁVEIS. SEL Sistemas Digitais Prof. Homero Schiabel
 DISPOSITIVOS LÓGICOS PROGRAMÁVEIS SEL 414 - Sistemas Digitais Prof. Homero Schiabel 1. Introdução Operação do circuito lógico pode ser descrita por: Tabela da Verdade Expressão booleana Dispositivo de
DISPOSITIVOS LÓGICOS PROGRAMÁVEIS SEL 414 - Sistemas Digitais Prof. Homero Schiabel 1. Introdução Operação do circuito lógico pode ser descrita por: Tabela da Verdade Expressão booleana Dispositivo de
CONCEITOS E DEFINIÇÕES. Automação?
 CONCEITOS E DEFINIÇÕES Automação? CONCEITOS E DEFINIÇÕES Ponto de vista mercadológico O termo automação foi introduzido nos anos 60 como apelo de marketing aos novos produtos então lançados. CONCEITOS
CONCEITOS E DEFINIÇÕES Automação? CONCEITOS E DEFINIÇÕES Ponto de vista mercadológico O termo automação foi introduzido nos anos 60 como apelo de marketing aos novos produtos então lançados. CONCEITOS
Estrutura do Sistema Operacional
 Sistemas Operacionais Prof. Esp. André Luís Belini Bacharel em Sistemas de Informações MBA em Gestão Estratégica de Negócios Aula 04 Estrutura do Sistema Operacional 2 1 Estrutura do Sistema Operacional
Sistemas Operacionais Prof. Esp. André Luís Belini Bacharel em Sistemas de Informações MBA em Gestão Estratégica de Negócios Aula 04 Estrutura do Sistema Operacional 2 1 Estrutura do Sistema Operacional
Sistema Distribuído. Sistema Distribuído. Aplicações Distribuídas. Conceitos Básicos
 Sistema Distribuído Conjunto de máquinas (CPU + memória) interligadas em rede. Sistema Distribuído Sistema operacional distribuído trata este conjunto como um único sistema computacional. Estação 1 Estação
Sistema Distribuído Conjunto de máquinas (CPU + memória) interligadas em rede. Sistema Distribuído Sistema operacional distribuído trata este conjunto como um único sistema computacional. Estação 1 Estação
Introdução à Programação de Computadores Fabricação Mecânica
 Introdução à Programação de Computadores Fabricação Mecânica Edilson Hipolito da Silva edilson.hipolito@ifsc.edu.br - http://www.hipolito.info Aula 03 - Conceitos: Hardware, Software, Sistema Operacional
Introdução à Programação de Computadores Fabricação Mecânica Edilson Hipolito da Silva edilson.hipolito@ifsc.edu.br - http://www.hipolito.info Aula 03 - Conceitos: Hardware, Software, Sistema Operacional
Composição do servoacionamento
 SERVOACIONAMENTO Composição do servoacionamento O servoacionamento é constituído dos seguintes componentes: Um servomotor, um servoconversor e um transdutor de posição Os Servoacionamentos são utilizados
SERVOACIONAMENTO Composição do servoacionamento O servoacionamento é constituído dos seguintes componentes: Um servomotor, um servoconversor e um transdutor de posição Os Servoacionamentos são utilizados
Arquitetura do Microcontrolador Atmega 328
 Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Arquitetura do Microcontrolador Atmega
Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Arquitetura do Microcontrolador Atmega
Sistemas Operacionais e Introdução à Programação. Módulo 1 Sistemas Operacionais
 Sistemas Operacionais e Introdução à Programação Módulo 1 Sistemas Operacionais 1 Competências: SOP 1. Compreender as abstrações de um sistema operacional e operar um sistema operacional Unix/Linux como
Sistemas Operacionais e Introdução à Programação Módulo 1 Sistemas Operacionais 1 Competências: SOP 1. Compreender as abstrações de um sistema operacional e operar um sistema operacional Unix/Linux como
Introdução à Computação: Máquinas Multiníveis
 Introdução à Computação: Máquinas Multiníveis Beatriz F. M. Souza (bfmartins@inf.ufes.br) http://inf.ufes.br/~bfmartins/ Computer Science Department Federal University of Espírito Santo (Ufes), Vitória,
Introdução à Computação: Máquinas Multiníveis Beatriz F. M. Souza (bfmartins@inf.ufes.br) http://inf.ufes.br/~bfmartins/ Computer Science Department Federal University of Espírito Santo (Ufes), Vitória,
ENTRADAS ANALÓGICAS CONVERSOR A/D
 PRINCÍPIOS DE AUTOMAÇÃO INDUSTRIAL ENTRADAS ANALÓGICAS CONVERSOR A/D Prof. Valmir PAI 2014.1 1 Sinais Analógicos O CLP: ENTRADAS E SAÍDAS Um valor analógico é continuo, não discreto, como visto na figura.
PRINCÍPIOS DE AUTOMAÇÃO INDUSTRIAL ENTRADAS ANALÓGICAS CONVERSOR A/D Prof. Valmir PAI 2014.1 1 Sinais Analógicos O CLP: ENTRADAS E SAÍDAS Um valor analógico é continuo, não discreto, como visto na figura.
Noções sobre Redes de Computadores. Aula 16/06 Secretariado Executivo
 Noções sobre Redes de Computadores Aula 16/06 Secretariado Executivo Conceito básico de redes Conjunto de computadores interligados compartilhando, softwares, arquivos e periféricos Objetivos Compartilhamento
Noções sobre Redes de Computadores Aula 16/06 Secretariado Executivo Conceito básico de redes Conjunto de computadores interligados compartilhando, softwares, arquivos e periféricos Objetivos Compartilhamento
Fundamentos de Sistemas Operacionais
 Fundamentos de Sistemas Operacionais Aula 14: Entrada e Saída: Dispositivos e Tipos de Acesso Diego Passos Dispositivos de E/S Operação de E/S É qualquer operação que mova dados do contexto do processador
Fundamentos de Sistemas Operacionais Aula 14: Entrada e Saída: Dispositivos e Tipos de Acesso Diego Passos Dispositivos de E/S Operação de E/S É qualquer operação que mova dados do contexto do processador
ULA (ALU) - UNIDADE DE ARITMÉTICA E LÓGICA
 - UNIDADE DE ARITMÉTICA E LÓGICA") FATEC SP - Análise e Desenvolv. De Sistemas - Ambiente Operacional PÁG. 1 II) ELEMENTOS DE HARDWARE: DIAGRAMA DE BLOCOS DE UM COMPUTADOR 1) CPU - UNIDADE CENTRAL DE PROCESSAMENTO RESPONSÁVEL PELA EXECUÇÃO
FATEC SP - Análise e Desenvolv. De Sistemas - Ambiente Operacional PÁG. 1 II) ELEMENTOS DE HARDWARE: DIAGRAMA DE BLOCOS DE UM COMPUTADOR 1) CPU - UNIDADE CENTRAL DE PROCESSAMENTO RESPONSÁVEL PELA EXECUÇÃO
Montagem e Manutenção de Computadores
 Montagem e Manutenção de Computadores Organização dos Computadores Aula de 04/03/2016 Professor Alessandro Carneiro Introdução Um computador consiste de vários dispositivos referidos como hardware: o teclado,
Montagem e Manutenção de Computadores Organização dos Computadores Aula de 04/03/2016 Professor Alessandro Carneiro Introdução Um computador consiste de vários dispositivos referidos como hardware: o teclado,
4.3 - DMA & Chipset. CEFET-RS Curso de Eletrônica. Profs. Roberta Nobre & Sandro Silva. e
 CEFET-RS Curso de Eletrônica 4.3 - DMA & Chipset Profs. Roberta Nobre & Sandro Silva robertacnobre@gmail.com e sandro@cefetrs.tche.br Unidade 04.3.1 DMA Dados podem ser transferidos entre dispositivos
CEFET-RS Curso de Eletrônica 4.3 - DMA & Chipset Profs. Roberta Nobre & Sandro Silva robertacnobre@gmail.com e sandro@cefetrs.tche.br Unidade 04.3.1 DMA Dados podem ser transferidos entre dispositivos
Barramento. Prof. Leonardo Barreto Campos 1
 Barramento Prof. Leonardo Barreto Campos 1 Sumário Introdução; Componentes do Computador; Funções dos Computadores; Estrutura de Interconexão; Interconexão de Barramentos Elementos de projeto de barramento;
Barramento Prof. Leonardo Barreto Campos 1 Sumário Introdução; Componentes do Computador; Funções dos Computadores; Estrutura de Interconexão; Interconexão de Barramentos Elementos de projeto de barramento;
Universidade Federal de Minas Gerais. Sistemas Operacionais. Aula 19. Sistema de Entrada/Saída
 Aula 19 Sistema de Entrada/Saída Sistema de E/S Por que estudar? Essenciais! Muitos tipos: - mouse - discos - impressora - scanner - rede - modem Cada fabricante complica de um jeito diferente. Tempos
Aula 19 Sistema de Entrada/Saída Sistema de E/S Por que estudar? Essenciais! Muitos tipos: - mouse - discos - impressora - scanner - rede - modem Cada fabricante complica de um jeito diferente. Tempos
Prof. Gerson 02/10/2009
 Prof. Gerson Definições Definição segundo a ABNT (Associação Brasileira de Normas Técnicas) É um equipamento eletrônico digital com hardware e software compatíveis com aplicações industriais. Definição
Prof. Gerson Definições Definição segundo a ABNT (Associação Brasileira de Normas Técnicas) É um equipamento eletrônico digital com hardware e software compatíveis com aplicações industriais. Definição
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. SDCD - Sistema Digital de Controle Distribuído
 Sistema Sistema Digital Digital de de Controle Controle Distribuído Distribuído SLIDE - 1 INTRODUÇÃO: AUTOMAÇÃO: Qualquer sistema, apoiado por computadores, que substitua o trabalho humano e que vise soluções
Sistema Sistema Digital Digital de de Controle Controle Distribuído Distribuído SLIDE - 1 INTRODUÇÃO: AUTOMAÇÃO: Qualquer sistema, apoiado por computadores, que substitua o trabalho humano e que vise soluções
Redes para Automação Industrial. Capítulo 1: Automação Industrial. Luiz Affonso Guedes 2006
 Redes para Automação Industrial Capítulo 1: Automação Industrial Luiz Affonso Guedes affonso@dca.ufrn.br 2006 Objetivos do Capítulo Estudo sistêmico de sistemas de automação industrial. Caracterização
Redes para Automação Industrial Capítulo 1: Automação Industrial Luiz Affonso Guedes affonso@dca.ufrn.br 2006 Objetivos do Capítulo Estudo sistêmico de sistemas de automação industrial. Caracterização
Técnico de Gestão e Programação de Sistemas Informáticos. Sistemas Operativos 10º ano
 Técnico de Gestão e Programação de Sistemas Informáticos Sistemas Operativos 10º ano Introdução aos Sistemas Embebidos Vivemos num mundo onde o software desempenha um papel crítico Mas a maior parte deste
Técnico de Gestão e Programação de Sistemas Informáticos Sistemas Operativos 10º ano Introdução aos Sistemas Embebidos Vivemos num mundo onde o software desempenha um papel crítico Mas a maior parte deste
Microcontroladores PIC16 - XM 116 -
 T e c n o l o g i a Microcontroladores PIC16 - XM 116 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC16 - XM 116 - INTRODUÇÃO O mundo da
T e c n o l o g i a Microcontroladores PIC16 - XM 116 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC16 - XM 116 - INTRODUÇÃO O mundo da
FTC Faculdade de Tecnologia e Ciências Engenharia Civil 1º Semestre. Conceitos Básicos. Rafael Barbosa Neiva
 FTC Faculdade de Tecnologia e Ciências Engenharia Civil 1º Semestre Conceitos Básicos Rafael Barbosa Neiva rafael@prodados.inf.br SUMÁRIO Introdução e conceitos básicos Hardware Software 2 Tecnologia da
FTC Faculdade de Tecnologia e Ciências Engenharia Civil 1º Semestre Conceitos Básicos Rafael Barbosa Neiva rafael@prodados.inf.br SUMÁRIO Introdução e conceitos básicos Hardware Software 2 Tecnologia da
Sistema Operacional. O S.O. é o programa mais importante do computador. - Realizar a interação entre o usuário, o hardware e o firmware -(BIOS)
") O S.O. é o programa mais importante do computador. É um controlador intermediário que fica entre os softwares da categoria dos aplicativos e o hardware. Ele é o tradutor / intérprete das nossas interações
O S.O. é o programa mais importante do computador. É um controlador intermediário que fica entre os softwares da categoria dos aplicativos e o hardware. Ele é o tradutor / intérprete das nossas interações
Entrada e Saída (E/S)
") Organização e Arquitetura de Computadores Entrada e Saída (E/S) Givanaldo Rocha de Souza http://docente.ifrn.edu.br/givanaldorocha givanaldo.rocha@ifrn.edu.br Baseado no material do prof. Sílvio Fernandes
Organização e Arquitetura de Computadores Entrada e Saída (E/S) Givanaldo Rocha de Souza http://docente.ifrn.edu.br/givanaldorocha givanaldo.rocha@ifrn.edu.br Baseado no material do prof. Sílvio Fernandes
2.1 NesC Seguem alguns dos principais desafios impostos à linguagem NesC:
 2 TinyOS e NesC O framework de programação mais utilizado em redes de sensores sem fio é composto pelo sistema operacional TinyOS [11] e pela linguagem de programação NesC [12]. A linguagem NesC foi definida
2 TinyOS e NesC O framework de programação mais utilizado em redes de sensores sem fio é composto pelo sistema operacional TinyOS [11] e pela linguagem de programação NesC [12]. A linguagem NesC foi definida
Fundamentos de Sistemas Operacionais de Arquitetura Aberta. CST em Redes de Computadores
 Fundamentos de Sistemas Operacionais de Arquitetura Aberta CST em Redes de Computadores Introdução Computadores Computadores são compostos, basicamente, de CPU, memória e dispositivos de entrada e saída
Fundamentos de Sistemas Operacionais de Arquitetura Aberta CST em Redes de Computadores Introdução Computadores Computadores são compostos, basicamente, de CPU, memória e dispositivos de entrada e saída
Estudo da placa de prototipagem Intel Galileo Gen2. Apostila de acompanhamento para o aluno.
 Estudo da placa de prototipagem Intel Galileo Gen2 Apostila de acompanhamento para o aluno. 1 Conteúdo Conteúdo... 2 1. Introdução... 3 2. Informações Gerais... 3 3. Componentes da Placa... 4 4. Especificações
Estudo da placa de prototipagem Intel Galileo Gen2 Apostila de acompanhamento para o aluno. 1 Conteúdo Conteúdo... 2 1. Introdução... 3 2. Informações Gerais... 3 3. Componentes da Placa... 4 4. Especificações