26/07/2009. Eduardo do Valle Simões Grupo de Sist. Embarcados, Evolutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móvel
|
|
|
- Henrique Zagalo Back
- 6 Há anos
- Visualizações:
Transcrição

1 Robótica Móve Inteigente: Da Simuação às Apicações no Mundo Rea Denis Fernando Wof Universidade de São Pauo USP - ICMC Eduardo do Vae Simões Grupo de Sist. Embarcados, Evoutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móve Onofre Trindade Junior I CT Sistemas Embarcados Críticos Robótica Móve Inteigente: Da Simuação às Apicações no Mundo Rea Denis Fernando Wof Universidade de São Pauo USP - ICMC Eduardo do Vae Simões Grupo de Sist. Embarcados, Evoutivos e Robóticos Fernando Santos Osório LRM Laboratório de Robótica Móve Onofre Trindade Junior I CT Sistemas Embarcados Críticos 1
2 Robótica Móve Simuadores de Robôs Móveis Payer/Stage/Gazebo Sistemas Robóticos Móveis Inteigentes Locaização Mapeamento SLAM Navegação # 3 Fundamentos Robótica Móve - Simuadores Por que usar simuadores? Economia de recursos financeiros Economia de tempo Evitar danos aos robôs e sensores Evitar acidentes Aperfeiçoamento de hardware e software # 4 Fundamentos 2


 3 tipos de icença")
 Exige icença SO: Linux, Windows e")
3 Simuadores de Robôs Móveis Carmen Desenvovido na CMU Simua e controa robôs móveis Gratuito e código aberto SO: Linux Aria/Saphira Desenvovido pea MobieRobots Simua e controa robôs Pioneer Exige icença SO: Linux e Windows # 5 Fundamentos Simuadores de Robôs Móveis Microsoft Robotics Studio Desenvovido pea Microsoft Simua e controa robôs móveis Simuação física (3D) 3 tipos de icença SO: Windows Webots Desenvovido pea Cyberbotics Simua e controa robôs móveis Simuação física (3D) Exige icença SO: Linux, Windows e Mac. # 6 Fundamentos 3


4 Payer/Stage/Gazebo Payer Sistema para controe de robôs móveis Suporta diversos tipos de robôs e sensores Stage Simuador de robôs móveis e sensores Ambientes bidimensionais Compatíve com Payer Gazebo Simuador de ata fideidade Ambientes em 3 dimensões Compatíve com Payer # 7 Fundamentos História do Payer Projeto iniciado em 2000 na University of Southern Caifornia. Hoje em dia, seu core básico continua sendo desenvovido peos autores originais, apesar de diversos pesquisadores de diferentes instituições contribuem para o projeto. Atuamente, o Payer é utiizado por diversas empresas e universidades em 5 continentes downoads por mês. # 8 Fundamentos 4

5 A imagem não pode ser exibida. Tavez o computador não tenha memória suficiente para abrir a imagem ou tavez ea esteja corrompida. Reinicie o computador e abra o arquivo novamente. Se ainda assim aparecer o x vermeho, poderá ser necessário excuir a imagem e inseri-a novamente. 26/07/2009 Características do Payer Software ivre Modeo Ciente/Servidor Desenvovido para sistemas Linux/Unix Comunicação baseada em sockets Cientes em: C, C++, Java, Python etc Interface de ato níve para acesso ao hardware Suporta grande quatidade de pataformas robóticas e sensores comerciais # 9 Fundamentos Programa de controe Camera PCI Programa do usuário Laser USB Aquisição de dados dos sensores Sonar Odometria Motores Seria Seria Canbus Comandos para os motores Panejamento Desocamento desejado # 10 Fundamentos 5


6 A imagem não pode ser exibida. Tavez o computador não tenha memória suficiente para abrir a imagem ou tavez ea esteja corrompida. Reinicie o computador e abra o arquivo novamente. Se ainda assim aparecer o x vermeho, poderá ser necessário excuir a imagem e inseri-a novamente. A imagem não pode ser exibida. Tavez o computador não tenha memória suficiente para abrir a imagem ou tavez ea esteja corrompida. Reinicie o computador e abra o arquivo novamente. Se ainda assim aparecer o x vermeho, poderá ser necessário excuir a imagem e inseri-a novamente. 26/07/2009 Payer Camera PCI Payer Programa do usuário Laser USB Aquisição de dados dos sensores Sonar Odometria Motores Seria Seria Canbus Comandos para o motor Panejamento Desocamento desejado # 11 Fundamentos Abstração de hardware Hardware Do Robô Servidor Payer Bibioteca Ciente do Payer Simuador Stage Simuador Gazebo Servidor Payer Servidor Payer C/C++ C# Java Tc Python Ruby Lisp Octave Programa do usuário # 12 Fundamentos 6

7 Modeo Ciente/Servidor Cientes podem se conectar a mútipos servidores Servidores aceitam conexão de mútipos cientes Diferentes programas/processos/threads podem processar dados de diferentes sensores do mesmo servidor. Operação remota # 13 Fundamentos Gazebo - Simuação 3D # 14 Fundamentos 7


8 Gazebo v0.8 # 15 Fundamentos Payer/Stage # 16 Fundamentos 8
9 Robótica Móve Simuadores de Robôs Móveis Payer/Stage/Gazebo Sistemas Robóticos Móveis Inteigentes Locaização Mapeamento SLAM Navegação # 17 Fundamentos Robôs Móveis - Características Um robô móve é uma máquina capaz de extrair informação do ambiente e usar seu conhecimento sobre o mesmo para se ocomover com um propósito definido. Ronad Arkin Principais características: Mobiidade Capacidade de percepção Autonomia Inteigência # 18 Fundamentos 9
10 Robôs Móveis - Apicações Guia de museu Mapeamento de minas Verificação da quaidade da água Navegação autônoma # 19 Fundamentos Probemas Sensores são imitados e imprecisos. Atuadores são imitados e imprecisos. O ambiente e o estado interno do robô são parciamente observáveis. Ambientes reais são dinâmicos e imprevisíveis. # 20 Fundamentos 10

11 Modeo Básico # 21 Fundamentos Robótica Móve Simuadores de Robôs Móveis Payer/Stage/Gazebo Sistemas Robóticos Móveis Inteigentes Locaização Mapeamento SLAM Navegação # 22 Fundamentos 11
12 Locaização Estimar a posição do robô em um ambiente previamente conhecido, utiizando informações obtidas por sensores. Destino??? # 23 Fundamentos Robôs Móveis - Apicações Guia de museu Mapeamento de minas Verificação da quaidade da água Navegação autônoma # 24 Fundamentos 12


13 Locaização - Probemas Efeito da imprecisão das informações dos sensores: Trajeto rea Odometria # 25 Fundamentos Locaização - Probemas Efeito da imprecisão das informações dos sensores: GPS Odometria # 26 Fundamentos 13
14 Locaização Tipos de probemas Tracking Posição inicia é conhecida Busca oca (correção de odometria) Locaização goba Posição inicia não é conhecida Busca goba # 27 Fundamentos Locaização - Souções Framework básico: Fitro de Bayes Representação da posição do robô Distribuição Norma (Fitro de Kaman) Maha de céuas (Grid / Markov) Partícuas/Amostras (Monte Caro) # 28 Fundamentos 14
15 Fitro de Bayes Nova estimativa Observação (diminuição de incerteza) Desocamento do robô (aumento de incerteza) Estimativa anterior # 29 Fundamentos Fitro de Kaman Uma das primeiras impementações práticas do fitro de Bayes (1960). Hipóteses para utiização do fitro: Erro médio de cada variáve igua a zero; Erro independente para cada variáve; Modeo inear de evoução do sistema; Reacionamento inear entre variáveis de estado e variáveis medidas. Se as hipóteses acima não forem cumpridas, a optimaidade não é assegurada. # 30 Fundamentos 15
 3. Σ = ( I K C ) Σt t 4.")
16 Fitro de Kaman Agoritmo fitro de Kaman( µ t-1,σ t-1, u t, z t ): Predição: µ t = tµ t 1 A + B u Σt = A Σ A + R t t 1 T t Correção: T T 1. Kt = ΣtCt ( CtΣtCt + Qt ) 2. µ t = µ t+ K t ( zt Ctµ t ) 3. Σ = ( I K C ) Σt t 4. Returnµ t,σ t t t t t t 1 # 31 Fundamentos Locaização Fitro de Kaman (EKF) Atuação (movimento do robô): aumento de incerteza Percepção (sensores): diminuição da incerteza # 32 Fundamentos 16
17 Locaização - Fitro de Kaman # 33 Fundamentos Fitro de Kaman - Avaiação Não é ótimo. Pode divergir de acordo a não-inearidade. Atamente Eficiente: compexidade poinomia com as dimensões de medição k e de estado n: O(k n 2 ) Funciona surpreendentemente bem, mesmo quando as suposições básicas são vioadas! Adequado para tracking (busca oca) # 34 Fundamentos 17
: aumento de incerteza Percepção (sensores):")
 # 36")
18 Locaização Maha de céuas Atuação (movimento do robô): aumento de incerteza Percepção (sensores): diminuição da incerteza # 35 Fundamentos Locaização Maha de céuas Posição do robô: ( x, y, θ) # 36 Fundamentos 18
19 Locaização - Exempo # 37 Fundamentos Maha de Céuas - Avaiação Possibiita ocaização goba. Precisão depende das dimensões das céuas Atíssima demanda computaciona # 38 Fundamentos 19



20 Locaização Partícuas (Monte Caro) Cada partícua representa a possibiidade do robô estar naquea posição especifica. É atribuído um peso a cada partícua proporciona a sua chance de representar a posição do robô. Partícuas com peso baixo são excuídas. Dado número suficiente de partícuas, é provado que o método converge. # 39 Fundamentos Fitro de Partícuas # 40 Fundamentos 20

21 Propagação das Partícuas # 41 Fundamentos Fitro de Partícuas - Exempo # 42 Fundamentos 21

22 Fitro de Partícuas - Simuação # 43 Fundamentos Fitro de Partícuas Agoritmo bastante eficiente computacionamente Possibiita ocaização goba Impementação reativamente simpes # 44 Fundamentos 22


23 Robótica Móve Simuadores de Robôs Móveis Payer/Stage/Gazebo Sistemas Robóticos Móveis Inteigentes Locaização Mapeamento SLAM Navegação # 45 Fundamentos Mapeamento Criar um modeo do ambiente a partir da ocaização do robô e das informações obtidas por sensores. # 46 Fundamentos 23


24 Tipos de Mapas Mapas métricos: representam propriedades geométricas do ambiente de forma quantitativa. Mapas topoógicos: representam a conectividade entre determinados ocais do ambiente. Normamente são utiizados grafos nessa representação. # 47 Fundamentos Mapeamento Métrico Grade de ocupação Dividir o espaço em céuas e estimar a probabiidade de ocupação de cada céua individuamente baseado na informação obtida peos sensores. Ao fina, cada céua é cassificada como ocupada, ivre ou indefinido. # 48 Fundamentos 24



25 Grade de Ocupação Mapa: occupancy grid # 49 Fundamentos Grade de Ocupação # 50 Fundamentos 25

26 Mapa baseado somente na odometria # 51 Fundamentos Robótica Móve Simuadores de Robôs Móveis Payer/Stage/Gazebo Sistemas Robóticos Móveis Inteigentes Locaização Mapeamento SLAM Navegação # 52 Fundamentos 26




27 Locaização e Mapeamento Simutâneos O SLAM é um dos maiores desafios da robótica móve. Dados: Desocamento do robô Informações obtidas peos sensores Deve-se estimar: O mapa do ambiente A ocaização/trajetória do robô # 53 Fundamentos Sam Summer Schoo # 54 Fundamentos 27


28 SLAM Fitro de Kaman Consiste em estimar a posição do robô e dos andmarks com o fitro de Kaman. As posição do robô e dos andmarks são correacionadas através da matriz de covariância # 55 Fundamentos SLAM Fitro de Kaman # 56 Fundamentos 28
29 29 SLAM EKF - Compexidade Um mapa com N andmarks estimará 2 +3 variáveis e terá uma matriz de covariância de 2 +3 x 2 +3 eementos. # 57 Fundamentos = , ), ( y x y x y x y x y y y y y xy x x x x xy x t t y x m Bex θ θ θ θ θ θ θ θ θ θ θ θ FastSLAM Idéia básica: utiizar um fitro de partícuas para estimar a posição do robô e o mapa do ambiente. # 58 Fundamentos Vantagens: Modeos de percepção e controe não-ineares Permite diferentes associações de dados em paraeo Estima toda a trajetória do robô on-ine Desvantagem: Número de partícuas necessário cresce exponenciamente com o número de variáveis.



30 FastSLAM 3 particuas mapa da particue 1 mapa da particua 3 59 # 59 Fundamentos mapa da particua 2 FastSLAM # 60 Fundamentos 30


31 FastSLAM - Resutados FastSLAM Odometria # 61 Fundamentos SLAM - Mutirrobô Posição inicia desconhecida. # 62 Fundamentos 31



32 Locaização e Mapeamento Robô Guia de Museu # 63 Fundamentos Locaização e Mapeamento em Ambientes Urbanos Probemas: Compexidade Escaa Irreguaridade do terreno Difíci representação # 64 Fundamentos 32




33 Pataforma Experimenta # 65 Fundamentos Locaização Monte Caro Soução: Grande número de partícuas Criação de áreas semi-ocupadas. Obtenção de pitch e ro por uma unidade de medida inercia Depois de ocaizar o robô, estima-se a trajetória utiizando o fitro de partícuas no sentido contrário. # 66 Fundamentos 33

34 Locaização Monte Caro # 67 Fundamentos Locaização - Resutados # 68 Fundamentos 34

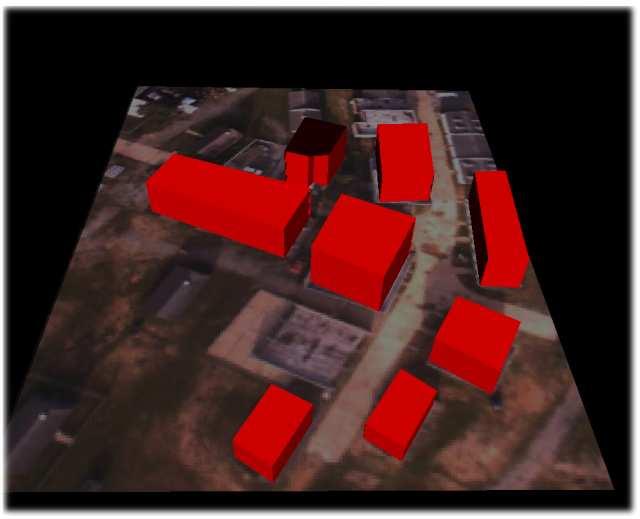
35 Locaização Fitro de Partícuas e GPS Cada partícua representa uma possíve trajetória competa do robô É atribuído um peso a cada partícua de acordo com sua proximidade do GPS. Partícuas que divergem do GPS recebem peso baixo e são eiminadas. Pontos do GPS partícuas # 69 Fundamentos Mapeamento - Resutados # 70 Fundamentos 35




36 Mapeamento - Resutados # 71 Fundamentos Mapeamento - Resutados Parte do campus da USC # 72 Fundamentos 36

37 Mapeamento Aquisição de dados # 73 Fundamentos # 74 Fundamentos 37
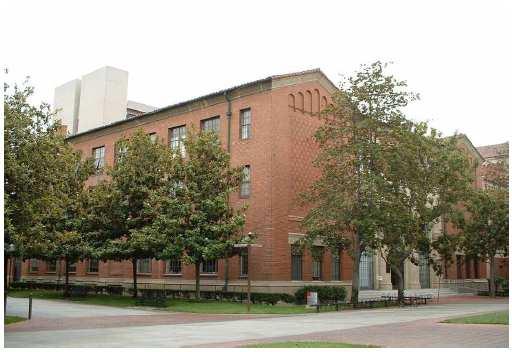
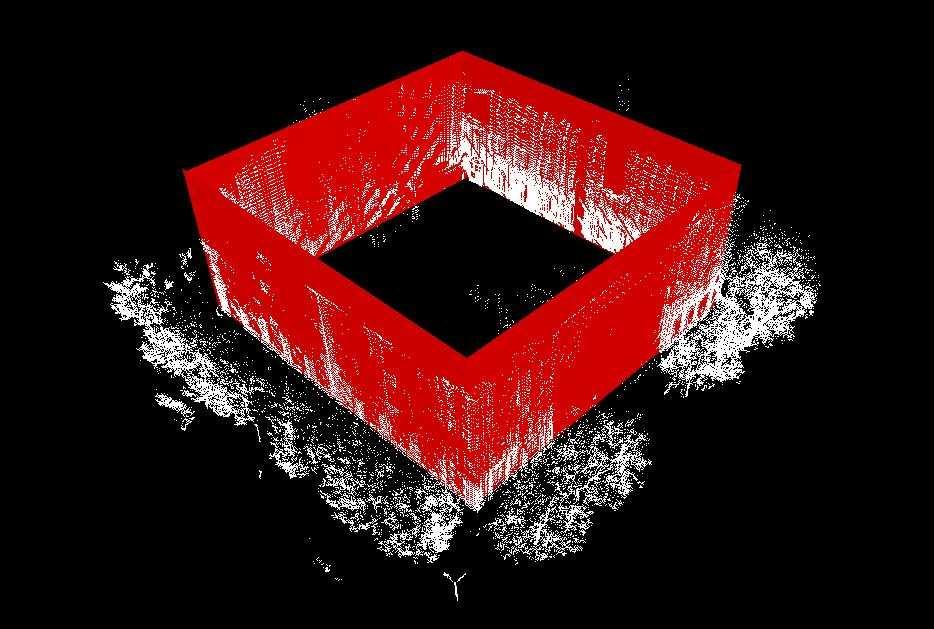
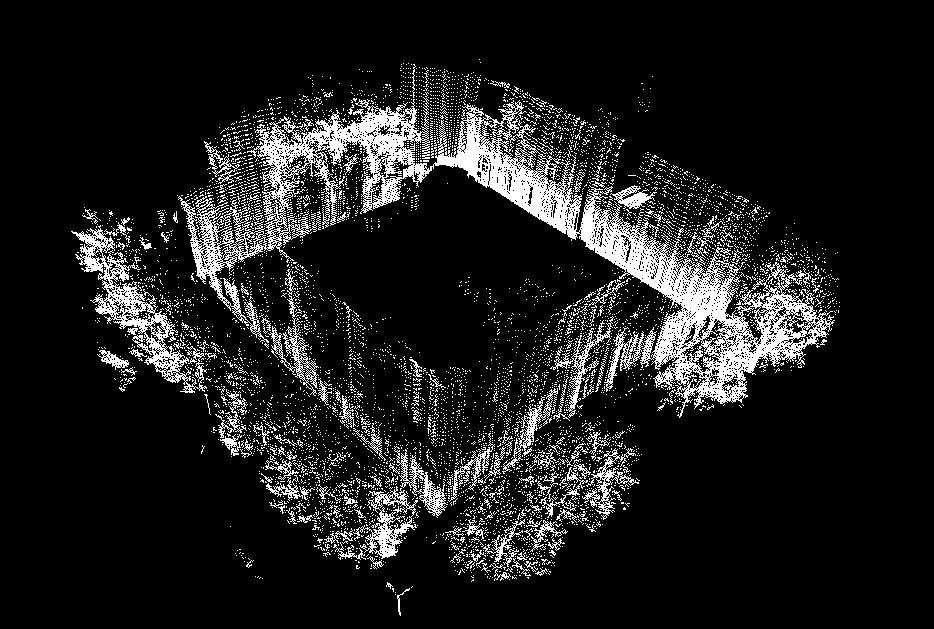

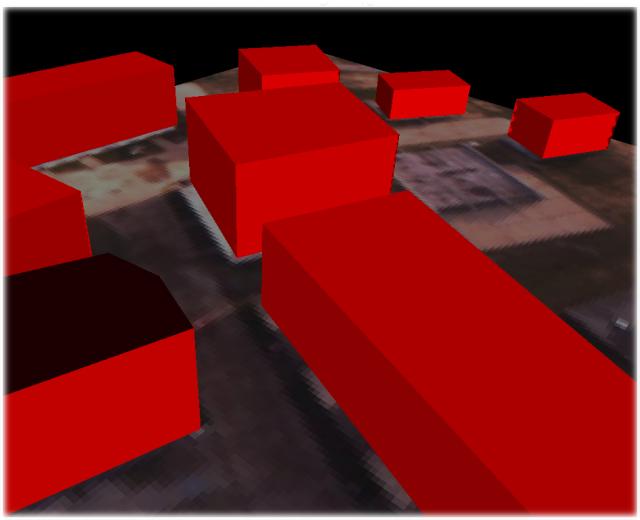
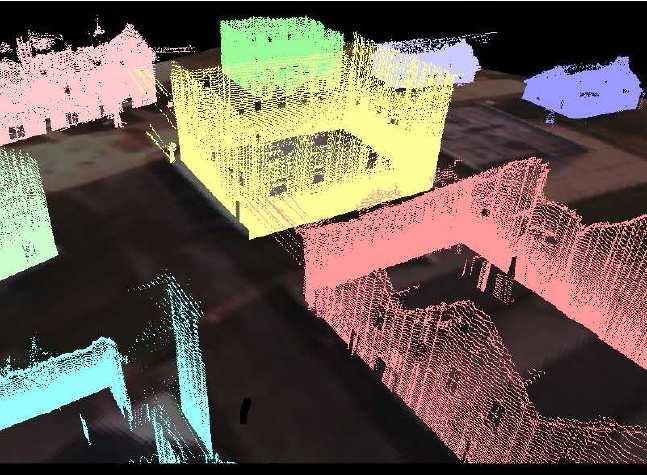
38 Outras Representações para Mapas 3D # 75 Fundamentos Mapas 3D # 76 Fundamentos 38



39 Mapeamento 3D ICMC/USP ICMC Boco 1 # 77 Fundamentos Mapeamento de Terreno # 78 Fundamentos 39
40 Mapeamento de Terreno # 79 Fundamentos Mapeamento de Terreno # 80 Fundamentos 40



41 Cassificação de Terreno Redes Neurais # 81 Fundamentos Cassificação de Terreno Redes Neurais # 82 Fundamentos 41




42 Projeto Veícuo Autônomo # 83 Fundamentos Robótica Móve Simuadores de Robôs Móveis Payer/Stage/Gazebo Sistemas Robóticos Móveis Inteigentes Locaização Mapeamento SLAM avegação # 84 Fundamentos 42

 # 85")

 Campos")
43 Panejamento de Trajetória A*: mapas métricos (grid) # 85 Fundamentos Dijkstra: mapas métricos/topoógicos (grafos) Campos Potencias # 86 Fundamentos 43


44 Vector Fied Histogram - VFH # 87 Fundamentos Navegação Visua # 88 Fundamentos 44


45 OBRIGADO! Denis Fernando Wof Eduardo do Vae Simões Fernando Santos Osório Onofre Trindade Junior - fosorio@icmc.usp.br - otjunior@icmc.usp.br # 89 FINAL 45
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
SSC5887 SSC5887. Histórico. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER. Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2010 Sistemas embarcados Computação reconfigurável
Disciplina de. Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC-0712 1 Fev. 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER
 SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
SSC5887 Introdução aos Sistemas Robóticos Denis Fernando Wolf 1º semestre 2011 Grupo de Sistemas Embarcados Evolutivos e Robóticos - SEER Áreas de atuação: Sistemas embarcados Computação reconfigurável
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Locaização Fitragem de Kaman Fitragem de kaman fornece uma abordagem
Aula 7 Robótica Móvel Mapeamento
 Aua 7 Robótica Móve Mapeamento Prof. Assoc. Marceo Becker SEM - EESC - USP Laboratório de Robótica Móve LabRoM Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada
Aua 7 Robótica Móve Mapeamento Prof. Assoc. Marceo Becker SEM - EESC - USP Laboratório de Robótica Móve LabRoM Sumário da Aua Tipos de Mapas Mapeamento 2D Mapeamento 3D Impementação Bibiografia Recomendada
INTRODUÇÃO À ROBÓTICA MÓVEL
 INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Odometria and Métodos de Dead-Reckoning Odometria permite boa
INTRODUÇÃO À ROBÓTICA MÓVEL Aua 25 Edson Prestes Departamento de Informática Teórica http://www.inf.ufrgs.br/~prestes prestes@inf.ufrgs.br Odometria and Métodos de Dead-Reckoning Odometria permite boa
SLAM II Localização e Mapeamento Simulatâneos
 SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
SCE5880 Algoritmos de Estimação para Robótica Móvel As posições do robô ao longo do tempo e os landmarks correspondem a nós em um grafo. Filtro de Informação SLAM II Localização e Mapeamento Simulatâneos
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Simulação de Robôs Móveis e Articulados: Aplicações e Prática. Fernando Santos Osório Rafael Alceste Berri
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
15/05/2013. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
19/05/2014. Histórico da Pesquisa em Robótica. Objetivos do curso. Informações. Calendário. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
Objetivos do curso SSC5880 Algoritmos de Estimação para Móvel Estudo de problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas na robótica
SEM0 M Aul u a l a 14 Sistema de Múltiplos Corpos Sistema Pro r f. D r. r Ma M r a c r elo l Becker SEM - EESC - USP
 SEM4 - Aua 4 Sistema de Mútipos Corpos Prof. Dr. Marceo ecker SEM - EESC - USP Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações /67 ntrodução
SEM4 - Aua 4 Sistema de Mútipos Corpos Prof. Dr. Marceo ecker SEM - EESC - USP Sumário da Aua ntrodução Sist. Muti-corpos no Pano Sist. Muti-corpos no Espaço Princípio de Jourdain Apicações /67 ntrodução
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Occupancy grid based graph-slam using the distance transform, SURF features and SGD
 Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
Occupancy grid based graph-slam using the distance transform, SURF features and SGD Autores: Arturo Gil, Miguel Juliá, Óscar Reinoso Artur Segal Kaim Agenda Introdução Arquitetura Resultados Trabalho futuro
PROGRAMAÇÃO ORIENTADA A OBJETOS: Introdução
 PROGRAMAÇÃO ORIENTADA A OBJETOS: Introdução Um pouco de História Primeiras Máquinas de Cacuar Ábaco há aproximadamente 4.000 a.c. Um pouco de História Primeiras Máquinas de Cacuar PASCALINA ano de 1642(Baise
PROGRAMAÇÃO ORIENTADA A OBJETOS: Introdução Um pouco de História Primeiras Máquinas de Cacuar Ábaco há aproximadamente 4.000 a.c. Um pouco de História Primeiras Máquinas de Cacuar PASCALINA ano de 1642(Baise
Módulo 3: Aplicações
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Mapeamento robótico. Mapeamento semântico. Metodologia. Maquinas de vetores de suporte. Maquinas de vetores de suporte. Modelos ocultos de Markov
 Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
Mapeamento robótico Exemplos de mapas: Mapeamento semântico Mapeamento semântico consiste na criação de mapas que não representam apenas a ocupação métrica do ambiente, mas também outras propriedades.
Modelagem Matemática e Simulação Computacional da Dinâmica de um Robô SCARA
 Proceeding Series of the Braziian Society of Appied and omputationa Mathematics, Vo 4, N, 6 Trabaho apresentado no DINON, Nata - RN, 5 Proceeding Series of the Braziian Society of omputationa and Appied
Proceeding Series of the Braziian Society of Appied and omputationa Mathematics, Vo 4, N, 6 Trabaho apresentado no DINON, Nata - RN, 5 Proceeding Series of the Braziian Society of omputationa and Appied
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
17/05/2011. Histórico da Pesquisa em Robótica. Objetivos do curso. Calendário. Informações. Histórico
 Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Objetivos do curso SSC5880 Algoritmos de Estimação para Robótica Móvel Estudo dos problemas fundamentais da robótica móvel Estudo da utilização de técnicas de estimação e de fusão de sensores aplicadas
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
Improvement of a Robotic Soccer Team Using a Multilayered Control Architecture
 Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio, Rodofo V. Vaentim Universidade Federa do Espírito Santo Abstract Very Sma Size Soccer
Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio, Rodofo V. Vaentim Universidade Federa do Espírito Santo Abstract Very Sma Size Soccer
Introdução. Introdução. Introdução. Introdução. Introdução. Introdução à Robótica Robótica Móvel Localização. Principais questões na Robótica
 à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
à Robótica Robótica Móvel Localização Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Principais questões na Robótica Onde estou? (localização) Aonde vou? (objetivo) Como vou? (planejamento)? à
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Improvement of a Robotic Soccer Team Using a Multilayered Control Architecture
 Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio and Rodofo V. Vaentim 3 Abstract Very Sma Size Soccer is an important category of Latin
Improvement of a Robotic Soccer Team Using a Mutiayered Contro Architecture Dougas F. Tavares, Leonardo S. Pauucio and Rodofo V. Vaentim 3 Abstract Very Sma Size Soccer is an important category of Latin
Programação. Robô Guia em Museu. Robôs Móveis - Aplicações. Oportunidade de: IP addresses and the port numbers of the components. Avaliação.
 SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf denis@icmc.usp.br Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
Análise matricial de estruturas não-lineares usando o Método de Newton.
 Anáise matricia de estruturas não-ineares usando o Método de Newton. Exercício Computaciona - MAP3121 1 Primeiro probema 1.1 Descrição da estrutura não-inear Considere um sistema formado por três barras
Anáise matricia de estruturas não-ineares usando o Método de Newton. Exercício Computaciona - MAP3121 1 Primeiro probema 1.1 Descrição da estrutura não-inear Considere um sistema formado por três barras
Gestão do Ciclo de Vida do Produto Integrada com as Core Tools
 Benefícios e Vantagens Ficha Técnica Gestão do Cico de Vida do Produto Integrada com as Core Toos O ISOQuaitas.PLM é um software abrangente que integra todas as atividades da Gestão do Cico de Vida do
Benefícios e Vantagens Ficha Técnica Gestão do Cico de Vida do Produto Integrada com as Core Toos O ISOQuaitas.PLM é um software abrangente que integra todas as atividades da Gestão do Cico de Vida do
4 DEFINIÇÃO DA GEOMETRIA, MALHA E PARÂMETROS DA SIMULAÇÃO
 4 DEFINIÇÃO DA GEOETRIA, ALHA E PARÂETROS DA SIULAÇÃO 4.1 Fornaha experimenta A fornaha experimenta utiizada como caso teste por Garreton (1994), era de 400kW aimentada com gás natura. Deste trabaho, estão
4 DEFINIÇÃO DA GEOETRIA, ALHA E PARÂETROS DA SIULAÇÃO 4.1 Fornaha experimenta A fornaha experimenta utiizada como caso teste por Garreton (1994), era de 400kW aimentada com gás natura. Deste trabaho, estão
5 Estimação de Parâmetros utilizando o Algoritmo SAGE
 5 Estimação de Parâmetros utiizando o Agoritmo SAGE Recentemente, vários agoritmos de ata resoução tem sido usados para estimar os parâmetros do cana com objetivo de vaidar as modeagens espaço temporais.
5 Estimação de Parâmetros utiizando o Agoritmo SAGE Recentemente, vários agoritmos de ata resoução tem sido usados para estimar os parâmetros do cana com objetivo de vaidar as modeagens espaço temporais.
UM ALGORITMO VNS MULTIOBJETIVO PARA O PROBLEMA DE SEQUENCIAMENTO COM ALOCAÇÃO DE TRABALHADORES
 UM ALGORITMO VNS MULTIOBJETIVO PARA O PROBLEMA DE SEQUENCIAMENTO COM ALOCAÇÃO DE TRABALHADORES Guido Pantuza Jr. Instituto Federa de Minas Gerais IFMG Rua Minas Gerais, Governador Vaadares MG. guido.junior@ifmg.edu.br
UM ALGORITMO VNS MULTIOBJETIVO PARA O PROBLEMA DE SEQUENCIAMENTO COM ALOCAÇÃO DE TRABALHADORES Guido Pantuza Jr. Instituto Federa de Minas Gerais IFMG Rua Minas Gerais, Governador Vaadares MG. guido.junior@ifmg.edu.br
Introdução. Introdução Exemplo. Introdução. Representação do Ambiente Exemplo. Representação do Ambiente. Mapeamento e Localização Simultâneos
 Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo USP/São Carlos e Localização Simultâneos Giampaolo Luiz Libralon Professora Roseli Aparecida Francelin Romero Introdução
EAE36AM - ESTATÍSTICA APLICADA A EXPERIMENTOS
 EAE36AM - ESTATÍSTICA APLICADA A EXPERIMENTOS AULA 1 PROFª SHEILA REGINA ORO Ementa Panejamento de experimentos; Panejamento amostra; Deineamento experimenta; Coeta e vaidação dos dados; Testes de comparação
EAE36AM - ESTATÍSTICA APLICADA A EXPERIMENTOS AULA 1 PROFª SHEILA REGINA ORO Ementa Panejamento de experimentos; Panejamento amostra; Deineamento experimenta; Coeta e vaidação dos dados; Testes de comparação
Uma heurística para o planejamento de lavra com alocação dinâmica de caminhões
 Abstract Uma heurística para o panejamento de avra com aocação dinâmica de caminhões (A heuristic or the open-pit mining panning probem with dynamic truc aocation) Francisco César Rodrigues de Araújo PPGEM/EM/UFOP
Abstract Uma heurística para o panejamento de avra com aocação dinâmica de caminhões (A heuristic or the open-pit mining panning probem with dynamic truc aocation) Francisco César Rodrigues de Araújo PPGEM/EM/UFOP
Computação e Linguagem de Programação
 Computação e Linguagem de Programação Aua 5 parte 1 Professores Sandro Fonseca de Souza Dison de Jesus Damião 1 Sumário Bibiografia Sugerida Motivações em FAE Introdução à Programação Linguagem de Programação
Computação e Linguagem de Programação Aua 5 parte 1 Professores Sandro Fonseca de Souza Dison de Jesus Damião 1 Sumário Bibiografia Sugerida Motivações em FAE Introdução à Programação Linguagem de Programação
Detecção de Infração em faixa de pedestres sem semáforos utilizando visão computacional e redes neurais
 Detecção de Infração em faixa de pedestres sem semáforos utiizando visão computaciona e redes neurais Aves, B. G. C.; ima, A. C. de C. Departamento de Engenharia Eétrica - Escoa Poitécnica - UFBA, R. Aristides
Detecção de Infração em faixa de pedestres sem semáforos utiizando visão computaciona e redes neurais Aves, B. G. C.; ima, A. C. de C. Departamento de Engenharia Eétrica - Escoa Poitécnica - UFBA, R. Aristides
Informática para Ciências e Engenharias (B) 2015/16. Teórica 5
 2015/16. Teórica 5") Informática para Ciências e Engenharias (B) 2015/16 Teórica 5 Na aua de hoje Controo de execução cicos condicionais whie end Exempos raiz quadrada whie Histograma whie e matrizes fórmua química whie e
Informática para Ciências e Engenharias (B) 2015/16 Teórica 5 Na aua de hoje Controo de execução cicos condicionais whie end Exempos raiz quadrada whie Histograma whie e matrizes fórmua química whie e
Disciplina de Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2009 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/ 1 Aula 03
Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle
 4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
4 e Veículos Autônomos Temas Principais: Tipos de Robôs Sensores e Atuadores Modelos Sensoriais Modelos Cinemáticos Controle Robótico: Controle Reativo Controle Deliberativo Controle Hierárquico Localização
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
15/05/2013. Localização I. Localização. Localização: classificação. Localização: classificação. Tipo de ambiente. Ambiente dinâmico - soluções
 SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
SCE5880 Algoritmos de Estimação para Robótica Móvel Localização Estimar a posição de um robô a partir de um mapa e de informações obtidas por sensores. Localização I Localização: classificação Tipo de
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Camada de Transporte
 Camada de Transporte Protocoos UDP e TCP Internetworking with TCP/IP D. Comer Mário Meirees Teixeira. UFMA-DEINF Protocoo UDP Protocoo de transporte não orientado a conexão Funciona sobre o serviço de
Camada de Transporte Protocoos UDP e TCP Internetworking with TCP/IP D. Comer Mário Meirees Teixeira. UFMA-DEINF Protocoo UDP Protocoo de transporte não orientado a conexão Funciona sobre o serviço de
Problemas comuns Desenvolvimento e Design de Sistemas Web Categorias de problemas Exemplo de problema de funcionamento
 Desenvovimento e Design de Sistemas Web Probemas comuns Web Sites ma definidos e projetados Necessidade de atuaização constante das informações: eternamente em construção Evoução extremamente rápida da
Desenvovimento e Design de Sistemas Web Probemas comuns Web Sites ma definidos e projetados Necessidade de atuaização constante das informações: eternamente em construção Evoução extremamente rápida da
Wireless LANs - Extens
 Wireess LANs - Extens QoS - Sumário Enquadramento Limitaçõ ções do 802.11 Anáise de souçõ ções A norma 802.11e Souçõ ções em 802.11b ção o MóveM 5.3.1 Wireess LANs - Extens QoS - Enquadramento Como suportar
Wireess LANs - Extens QoS - Sumário Enquadramento Limitaçõ ções do 802.11 Anáise de souçõ ções A norma 802.11e Souçõ ções em 802.11b ção o MóveM 5.3.1 Wireess LANs - Extens QoS - Enquadramento Como suportar
II. MODELAGEM MATEMÁTICA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
II. MODELAGEM MATEMÁTICA
 INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA MECÂNICA MP-7: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS II. MODELAGEM MATEMÁTICA Prof. Davi Antônio dos Santos (davists@ita.br) Departamento de Mecatrônica
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA
 ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
ALGORITMO DE MAPEAMENTO USANDO MODELAGEM PROBABILÍSTICA Anderson A. de Souza, Adelardo A. D. Medeiros, Luiz M. G. Gonçalves Universidade Federal do Rio Grande do Norte DCA-CT-UFRN, 59072-970, Natal, RN,
SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA
 SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GGH 7 4 a 7 Outubro de 2007 Rio de Janeiro - RJ GRUPO I GRUPO DE ESTUDO DE GERAÇÃO HIDRÁULICA DETERMINAÇÃO DAS CAUSAS DA INSTABILIDADE
SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GGH 7 4 a 7 Outubro de 2007 Rio de Janeiro - RJ GRUPO I GRUPO DE ESTUDO DE GERAÇÃO HIDRÁULICA DETERMINAÇÃO DAS CAUSAS DA INSTABILIDADE
Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros Sistemas de Localização Bibliografia Recomendada
 Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Aula 6 Introdução à Robótica Móvel Localização Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Introdução Representações da Crença e Mapas Localização Probabilística baseada em Mapas Exemplos de outros
Assim, a rápida acumulação de erros pequenos pode causar o fracasso de quase todos os métodos para resolver o problema de SLAM.
 1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
1 Introdução Avanços significativos têm sido feitos no sentido de criar um robô capaz de realizar tarefas completamente autônomas. As tarefas básicas como planejamento de trajetórias, localização e navegação
AMOSTRAGEM. Para estudar estas variabilidades utilizam-se técnicas geoestatísticas.
 CURSO BÁSICO DE GEOESTATÍSTICA COM O USO DO GS + E CONFECÇÃO DE MAPAS DE KRIGAGEM UTILIZANDO O SURFER Engenheiro Agrônomo Rafae Montanari AMOSTRAGEM EXEMPLO: A AMOSTRAGEM DE SOLO PARA DETECTAR UMA VARIABILIDADE
CURSO BÁSICO DE GEOESTATÍSTICA COM O USO DO GS + E CONFECÇÃO DE MAPAS DE KRIGAGEM UTILIZANDO O SURFER Engenheiro Agrônomo Rafae Montanari AMOSTRAGEM EXEMPLO: A AMOSTRAGEM DE SOLO PARA DETECTAR UMA VARIABILIDADE
Segmentação multiresolução: uma abordagem paralela para segmentação de imagens de alta resolução em arquiteturas de múltiplos núcleos
 Segmentação mutiresoução: uma abordagem paraea para segmentação de imagens de ata resoução em arquiteturas de mútipos núceos Patrick Nigri Happ 1 Rodrigo da Siva Ferreira 1 Cristiana Bentes 1 Gison Aexandre
Segmentação mutiresoução: uma abordagem paraea para segmentação de imagens de ata resoução em arquiteturas de mútipos núceos Patrick Nigri Happ 1 Rodrigo da Siva Ferreira 1 Cristiana Bentes 1 Gison Aexandre
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
USP - ICMC - SSC SSC 0714 (RMA) - 1o. Semestre 2010 Disciplina de SSC-0714 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Maurício Acconcia Dias - macccdias
ϕ ( + ) para rotações com o Flechas e deflexões
 para rotações com o Flechas e deflexões") Fechas e defeões Seja uma barra reta, em euiíbrio, apoiada em suas etremidades, submetida a uma feão norma. Esta barra fetida, deia de ser reta assumindo uma forma, como a mostrada na figura. figura barra
Fechas e defeões Seja uma barra reta, em euiíbrio, apoiada em suas etremidades, submetida a uma feão norma. Esta barra fetida, deia de ser reta assumindo uma forma, como a mostrada na figura. figura barra
Uma Estratégia Baseada na Metaheurística GRASP para o Posicionamento de RSUs em Redes Veiculares Híbridas com Comunicação Síncrona
 Uma Estratégia Baseada na Metaheurística GRASP para o Posicionamento de RSUs em Redes Veicuares Híbridas com Comunicação Síncrona Taís Rocha Siva, João Fernando M. Sarubbi, Favio V. Cruzeiro Martins Departamento
Uma Estratégia Baseada na Metaheurística GRASP para o Posicionamento de RSUs em Redes Veicuares Híbridas com Comunicação Síncrona Taís Rocha Siva, João Fernando M. Sarubbi, Favio V. Cruzeiro Martins Departamento
A Utilização de Redes Neurais Como Ferramenta de Auxílio no. Terminais de Sistemas Metroferroviários.
 A Utilização de Redes Neurais Como Ferramenta de Auxílio no Planejamento para a Implantação de Terminais de Sistemas Metroferroviários. Redes Neurais Primeiras pesquisas em 1943 Interesse recente na comunidade
A Utilização de Redes Neurais Como Ferramenta de Auxílio no Planejamento para a Implantação de Terminais de Sistemas Metroferroviários. Redes Neurais Primeiras pesquisas em 1943 Interesse recente na comunidade
Atuais objetivos da normalização
 Acesse: http://fuvestibuar.com.br/ Atuais objetivos da normaização Você agora vai estudar a útima parte deste assunto: os atuais objetivos da normaização. Pode-se dizer que a primeira fase da normaização,
Acesse: http://fuvestibuar.com.br/ Atuais objetivos da normaização Você agora vai estudar a útima parte deste assunto: os atuais objetivos da normaização. Pode-se dizer que a primeira fase da normaização,
Localização. Localização
 Localização Construção de Mapas Localização posição do robô features Extração de Informação ação Planejamento da Missão trajetória Percepção Controle de Trajetória velocidades dados brutos Sensoriamento
Localização Construção de Mapas Localização posição do robô features Extração de Informação ação Planejamento da Missão trajetória Percepção Controle de Trajetória velocidades dados brutos Sensoriamento
Triângulos. O triângulo é uma figura geométrica muito. Para pensar. Nossa aula
 U UL L 41 Triânguos Para pensar O triânguo é uma figura geométrica muito utiizada em construções. Você já deve ter notado que existem vários tipos de triânguo. Observe na armação do tehado os tipos diferentes
U UL L 41 Triânguos Para pensar O triânguo é uma figura geométrica muito utiizada em construções. Você já deve ter notado que existem vários tipos de triânguo. Observe na armação do tehado os tipos diferentes
Informática para Ciências e Engenharias (B) 2016/17. Teórica 3
 2016/17. Teórica 3") Informática para Ciências e Engenharias (B) 2016/17 Teórica 3 Na aua de hoje Vetores. Cicos FOR. Percursos em vetores. Exempos 22 Março 2017 Vetores; cicos FOR 2 Probema dos Contaminantes Para avaiar a
Informática para Ciências e Engenharias (B) 2016/17 Teórica 3 Na aua de hoje Vetores. Cicos FOR. Percursos em vetores. Exempos 22 Março 2017 Vetores; cicos FOR 2 Probema dos Contaminantes Para avaiar a
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
Perfis Importantes no Scrum
 Scrum Modeo ági de gestão de projetos; Conceito mais importante chama-se sprint (ou cico); Origem na indústria automobiística; Livro de Schwaber e Beede (2001) expica de forma competa e sistemática; Perfis
Scrum Modeo ági de gestão de projetos; Conceito mais importante chama-se sprint (ou cico); Origem na indústria automobiística; Livro de Schwaber e Beede (2001) expica de forma competa e sistemática; Perfis
Andson M. Balieiro, Kelvin L. Dias {amb4,
 Mapeamento de Redes Virtuais Secundárias em Substrato Sem Fio Baseado em Rádio Cognitivo: Formuação Mutiobjetivo e Anáise Andson M. Baieiro, Kevin L. Dias {amb4, kd}@cin.ufpe.br Agenda Motivação e Cenário
Mapeamento de Redes Virtuais Secundárias em Substrato Sem Fio Baseado em Rádio Cognitivo: Formuação Mutiobjetivo e Anáise Andson M. Baieiro, Kevin L. Dias {amb4, kd}@cin.ufpe.br Agenda Motivação e Cenário
ENTECA 2003 IV ENCONTRO TECNOLÓGICO DA ENGENHARIA CIVIL E ARQUITETURA
 4 ENTECA RESOLUÇÃO DE PÓRTICOS PLANOS ATRAVÉS DA ANÁLISE MATRICIAL DE ESTRUTURAS Marcio Leandro Micheim Acadêmico Engenharia Civi Universidade Estadua de Maringá e-mai: micheim_eng@hotmaicom Ismae Wison
4 ENTECA RESOLUÇÃO DE PÓRTICOS PLANOS ATRAVÉS DA ANÁLISE MATRICIAL DE ESTRUTURAS Marcio Leandro Micheim Acadêmico Engenharia Civi Universidade Estadua de Maringá e-mai: micheim_eng@hotmaicom Ismae Wison
O triângulo é uma figura geométrica muito. Você já sabe que o triângulo é uma figura geométrica de:
 U UL L cesse: http://fuvestibuar.com.br/ Triânguos Para pensar O triânguo é uma figura geométrica muito utiizada em construções. Você já deve ter notado que existem vários tipos de triânguo. Observe na
U UL L cesse: http://fuvestibuar.com.br/ Triânguos Para pensar O triânguo é uma figura geométrica muito utiizada em construções. Você já deve ter notado que existem vários tipos de triânguo. Observe na
IA368-W Métodos Estocásticos em Robótica Móvel
 IA368-W Métodos Estocásticos em Robótica Móvel Prof. Eleri Cardozo Prof. Eric Rohmer Colaboradores: Leonardo R. Olivi Paulo G. Pinheiro Ricardo S. Souza Fernando C.A. Pinho PROPAGAÇÃO DE ERROS EM ODOMETRIA
IA368-W Métodos Estocásticos em Robótica Móvel Prof. Eleri Cardozo Prof. Eric Rohmer Colaboradores: Leonardo R. Olivi Paulo G. Pinheiro Ricardo S. Souza Fernando C.A. Pinho PROPAGAÇÃO DE ERROS EM ODOMETRIA
UM MODELO NÃO-LINEAR PARA ANÁLISE DA INTERAÇÃO SOLO-ESTRUTURA DE DUTOS SUBTERRÂNEOS POR MEIO DE ELEMENTOS DE PÓRTICO
 UM MODELO NÃO-LINEAR PARA ANÁLISE DA INTERAÇÃO SOLO-ESTRUTURA DE DUTOS SUBTERRÂNEOS POR MEIO DE ELEMENTOS DE PÓRTICO Wadir Terra Pinto 1, Pauo R. Dias Pinheiro 2 1 Departamento de Materiais e Construção
UM MODELO NÃO-LINEAR PARA ANÁLISE DA INTERAÇÃO SOLO-ESTRUTURA DE DUTOS SUBTERRÂNEOS POR MEIO DE ELEMENTOS DE PÓRTICO Wadir Terra Pinto 1, Pauo R. Dias Pinheiro 2 1 Departamento de Materiais e Construção
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2014 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales (LRM
CONTROLE MULTIVARIÁVEL DE UNIDADES GERADORAS HIDRELÉTRICAS UTILIZANDO CONTROLE PREDITIVO BASEADO EM MODELO
 CONTROLE MULTIVARIÁVEL DE UNIDADES GERADORAS HIDRELÉTRICAS UTILIZANDO CONTROLE PREDITIVO BASEADO EM MODELO Henrique Augusto Menarin, Rodrigo Pereira Gosmann, João Marcos Castro Soares, Juio Eias Normey-Rico
CONTROLE MULTIVARIÁVEL DE UNIDADES GERADORAS HIDRELÉTRICAS UTILIZANDO CONTROLE PREDITIVO BASEADO EM MODELO Henrique Augusto Menarin, Rodrigo Pereira Gosmann, João Marcos Castro Soares, Juio Eias Normey-Rico
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2013 Disciplina de SSC-0714 1 Março 2013 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
EDDIE BATISTA DE LIMA FILHO
 COMPREÃO DE IMAGEN UTILIZANDO RECORRÊNCIA DE PADRÕE MULTIECALA COM CRITÉRIO DE CONTINUIDADE INTER-BLOCO EDDIE BATITA DE LIMA FILHO TEE UBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DO PROGRAMA DE PÓ-GRADUAÇÃO
COMPREÃO DE IMAGEN UTILIZANDO RECORRÊNCIA DE PADRÕE MULTIECALA COM CRITÉRIO DE CONTINUIDADE INTER-BLOCO EDDIE BATITA DE LIMA FILHO TEE UBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DO PROGRAMA DE PÓ-GRADUAÇÃO
Edital 06/2016 Programa de Pós-Graduação em Engenharia Ambiental Processo Seletivo de Mestrado 2017 Instruções
 Edita 06/2016 Programa de Pós-Graduação em Engenharia Ambienta Processo Seetivo de Mestrado 2017 Instruções 22 de agosto de 2016 1 Candidatos admissíveis; vagas; e bosas de mestrado Podem se candidatar
Edita 06/2016 Programa de Pós-Graduação em Engenharia Ambienta Processo Seetivo de Mestrado 2017 Instruções 22 de agosto de 2016 1 Candidatos admissíveis; vagas; e bosas de mestrado Podem se candidatar
Emerson Marcos Furtado
 Emerson Marcos Furtado Mestre em Métodos Numéricos pea Universidade Federa do Paraná (UFPR). Graduado em Matemática pea UFPR. Professor do Ensino Médio nos estados do Paraná e Santa Catarina desde 199.
Emerson Marcos Furtado Mestre em Métodos Numéricos pea Universidade Federa do Paraná (UFPR). Graduado em Matemática pea UFPR. Professor do Ensino Médio nos estados do Paraná e Santa Catarina desde 199.
PROVA 03/07 Segunda-feira (semana que vem)
") damkeisabela@gmail.com PROVA 03/07 Segunda-feira (semana que vem) SISTEMAS OPERACIONAIS Os sistemas operacionais mais comuns que existem para computadores e que o mercado irá oferecer para você são : Microsoft
damkeisabela@gmail.com PROVA 03/07 Segunda-feira (semana que vem) SISTEMAS OPERACIONAIS Os sistemas operacionais mais comuns que existem para computadores e que o mercado irá oferecer para você são : Microsoft
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2011 Disciplina de Robôs Móveis Autônomos SSC-5888 1 Maio 2011 Prof. Fernando Santos Osório LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC
Informática para Ciências e Engenharias (B) 2015/16. Teórica 9
 2015/16. Teórica 9") Informática para Ciências e Engenharias (B) 2015/16 Teórica 9 Na aua de hoje Estruturas e vectores de estruturas. Cácuo da massa moecuar Cácuo da fracção de um resíduo em sequências de proteínas Estruturas
Informática para Ciências e Engenharias (B) 2015/16 Teórica 9 Na aua de hoje Estruturas e vectores de estruturas. Cácuo da massa moecuar Cácuo da fracção de um resíduo em sequências de proteínas Estruturas
GRUPO X GRUPO DE ESTUDO DE SOBRETENSÕES E COORDENAÇÃO DE ISOLAMENTO - GSC
 SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GSC - 1 16 a 1 Outubro de 005 Curitiba - Paraná GRUPO X GRUPO DE ESTUDO DE SORETENSÕES E COORDENAÇÃO DE ISOLAMENTO - GSC DESENVOLVIMENTO
SNPTEE SEMINÁRIO NACIONAL DE PRODUÇÃO E TRANSMISSÃO DE ENERGIA ELÉTRICA GSC - 1 16 a 1 Outubro de 005 Curitiba - Paraná GRUPO X GRUPO DE ESTUDO DE SORETENSÕES E COORDENAÇÃO DE ISOLAMENTO - GSC DESENVOLVIMENTO
SE A Sistema Embarcado de avegação Autônoma. Agenda. Infos do curso e apresentadores: INCT-SEC, FOG Jogos de Corrida: Histórico, Evolução, Conceitos
 em Jogos e Aplicações de Inteligência Artificial Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Gustavo Pessin Kalinka R.L.J. Castelo Branco USP - Universidade de São Paulo - ICMC LRM
em Jogos e Aplicações de Inteligência Artificial Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Gustavo Pessin Kalinka R.L.J. Castelo Branco USP - Universidade de São Paulo - ICMC LRM
Análise univariada e Multivariada no mapeamento genético da pressão arterial
 Anáise univariada e Mutivariada no mapeamento genético da pressão arteria Nubia Esteban Duarte 1, Júia Maria Pavan Soer, 1 e Aexandre Pereira, 2 1 Universidade de São Pauo (USP) nubiaest@ime.usp.br 2 Laboratório
Anáise univariada e Mutivariada no mapeamento genético da pressão arteria Nubia Esteban Duarte 1, Júia Maria Pavan Soer, 1 e Aexandre Pereira, 2 1 Universidade de São Pauo (USP) nubiaest@ime.usp.br 2 Laboratório
Disciplina de Robôs Móveis Autônomos SSC-5888
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2009 Disciplina de Robôs Móveis Autônomos SSC-5888 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica
 ! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
! " # $% #'&()(& Robótica Móvel Inteligente: Aplicações da Inteligência Artificial nas Pesquisas em Robótica * +, -. - / 012 34 5 1 6 7 8 7 9 : 7 ;< = >? > 8 @ A B : 8 : B 7 8 @ C 9 D 0 E. F 0,. / 0, +
A própria caracterização geométrica da superfície topográfica, dada pela altitude, é definida rigorosamente a partir da superfície do geóide;
 1. Geóide a definição da Forma da Terra recorre-se a dois conceitos: o da superfície topográfica (superfície sóida da Terra) e o da superfície do geóide (superfície equipotencia de referência); Dada as
1. Geóide a definição da Forma da Terra recorre-se a dois conceitos: o da superfície topográfica (superfície sóida da Terra) e o da superfície do geóide (superfície equipotencia de referência); Dada as
IA368-W Métodos Estocásticos em Robótica Móvel
 IA368-W Métodos Estocásticos em Robótica Móvel Prof. Eleri Cardoo Prof. Eric Rohmer Colaboradores: Leonardo R. Olivi Paulo G. Pinheiro Ricardo S. Soua Fernando C.A. Pinho MAPEAMENTO DE AMBIENTES é o processo
IA368-W Métodos Estocásticos em Robótica Móvel Prof. Eleri Cardoo Prof. Eric Rohmer Colaboradores: Leonardo R. Olivi Paulo G. Pinheiro Ricardo S. Soua Fernando C.A. Pinho MAPEAMENTO DE AMBIENTES é o processo
MODELAGEM EFICIENTE DO COMPORTAMENTO DE ATENUADORES ACÚSTICOS UTILIZANDO O MÉTODO DAS SOLUÇÕES FUNDAMENTAIS
 MODELAGEM EFICIENTE DO COMPORTAMENTO DE ATENUADORES ACÚSTICOS UTILIZANDO O MÉTODO DAS SOLUÇÕES FUNDAMENTAIS Edmundo Guimarães Costa edmundo_costa@coc.ufrj.br Programa de Engenharia Civi, COPPE Universidade
MODELAGEM EFICIENTE DO COMPORTAMENTO DE ATENUADORES ACÚSTICOS UTILIZANDO O MÉTODO DAS SOLUÇÕES FUNDAMENTAIS Edmundo Guimarães Costa edmundo_costa@coc.ufrj.br Programa de Engenharia Civi, COPPE Universidade
Produto : Microsiga Protheus SIGAGFE, Gestão de Frete Embarcador 11.8
 Ateração no Reatório de onciiação ontábi Produto : Microsiga Protheus SIGAGFE, Gestão de Frete Embarcador 11.8 hamado : TPLGZG Data da pubicação : 05/08/14 País(es) : Todos Banco(s) de Dados : Todos Esta
Ateração no Reatório de onciiação ontábi Produto : Microsiga Protheus SIGAGFE, Gestão de Frete Embarcador 11.8 hamado : TPLGZG Data da pubicação : 05/08/14 País(es) : Todos Banco(s) de Dados : Todos Esta
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Utilização da Simulação de Processo para Prever o Comportamento do Sistema de Tratamento de Efluente Ácido em uma Indústria de Cloro Soda
 Utiização da Simuação de Processo para Prever o Comportamento do Sistema de Tratamento de Efuente Ácido em uma Indústria de Coro Soda J. Z. A. PAFFER 1, J. I. H. T. NETO 2, L. S. PEDROSA 2, R. BRITO 1
Utiização da Simuação de Processo para Prever o Comportamento do Sistema de Tratamento de Efuente Ácido em uma Indústria de Coro Soda J. Z. A. PAFFER 1, J. I. H. T. NETO 2, L. S. PEDROSA 2, R. BRITO 1
Modelo para o Campo Magnético de uma Agulha Retilínea
 4 Modeagens Este capítuo se dedica a simuar o sina gerado peo transdutor devido ao campo magnético gerado por uma aguha e anaisar as variáveis do probema. Eistem diferentes aproimações para o campo gerado
4 Modeagens Este capítuo se dedica a simuar o sina gerado peo transdutor devido ao campo magnético gerado por uma aguha e anaisar as variáveis do probema. Eistem diferentes aproimações para o campo gerado