Disciplina de. Programação de Robôs Móveis SSC-0712
|
|
|
- Marisa Leal Osório
- 8 Há anos
- Visualizações:
Transcrição
1 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2014 Disciplina de SSC Fev Prof. Fernando Santos Osório fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales e Vitor Utino (LRM) Web: Wiki ICMC: ou Aula 02 Aula 02 - Introdução Agenda: 1. Robôs Móveis * Sensores * Atuadores 2. Programação e Uso de Robôs Móveis * Arduino * SRV1 * Pioneer P3-AT, DX e Erratic Era-Mobi 3. Player-Stage, Gazebo, MORSE 2 Fev
.")





2 Objetivos da Disciplina Objetivos Introduzir conceitos básicos sobre hardware e software de robôs móveis (RM). Familiarizar o aluno com os sensores e atuadores mais comuns utilizados na robótica móvel. Estudo de arquiteturas e softwares de controle de RM. Implementação em laboratório de algoritmos de navegação para a solução de problemas clássicos da robótica móvel. Programa 3 Fev Descrição e análise de características dos sensores e atuadores mais utilizados na área de robótica móvel; - Estudo das arquiteturas de robôs móveis; - Estudo de algoritmos de navegação e de cooperação de robôs móveis; - Estudo e utilização da ferramenta Player/Stage para o controle de robôs; - Desenvolvimento de projetos em laboratório utilizando simuladores de robôs móveis na solução de problemas. Robôs Móveis Autônomos Robôs Móveis Autônomos Exemplos de Aplicações... 4 Março






3 Robôs Móveis Empresas & Empregos Jan Robôs Móveis Autônomos: na prática... 6 Fev








4 Robôs Móveis Autônomos: na prática... LRM Lab. de Robótica Móvel do ICMC/USP INCT-SEC Instituto Nacional de Sistemas Embarcados Críticos CRob-SC/USP Centro de Robótica de São Carlos 7 Fev Robôs Móveis Autônomos Robôs Móveis Autônomos Exemplos de Aplicações desenvolvidas no LRM no ICMC Veículos Autônomos CARINA II ( Videos: 8 Fev

 Microsoft Robotics Studio 10")
5 Robôs Móveis Autônomos Robôs Móveis Autônomos Referências Complementares... Exemplos de Aplicações desenvolvidas no LRM no ICMC Sensores Velodyne HDL-32E 9 Fev Robótica Móvel Simuladores de Robôs Móveis Player / Stage ROS / Gazebo MORSE (Blender) Microsoft Robotics Studio 10 Sistemas Robóticos Móveis Inteligentes Localização Mapeamento SLAM Planejamento de Trajetórias Seguimento de Trajetórias / Navegação Fev


6 Robótica Móvel - Simuladores Por que usar simuladores? Economia de recursos financeiros Economia de tempo Evitar danos aos robôs e sensores Evitar acidentes Aperfeiçoamento de hardware e software 11 Fev Simuladores de Robôs Móveis Carmen Desenvolvido na CMU Simula e controla robôs móveis Gratuito e código aberto SO: Linux Aria/Saphira Desenvolvido pela MobileRobots Simula e controla robôs Pioneer Exige licença SO: Linux e Windows # 12 6
 3 tipos de")
 Exige licença SO: Linux,")


7 Simuladores de Robôs Móveis Microsoft Robotics Studio Desenvolvido pela Microsoft Simula e controla robôs móveis Simulação física (3D) 3 tipos de licença SO: Windows Webots Desenvolvido pela Cyberbotics Simula e controla robôs móveis Simulação física (3D) Exige licença SO: Linux, Windows e Mac. # 13 Player/Stage/Gazebo Player Sistema para controle de robôs móveis Suporta diversos tipos de robôs e sensores Stage Simulador de robôs móveis e sensores Ambientes bidimensionais Compatível com Player Gazebo Simulador de alta fidelidade Ambientes em 3 dimensões Compatível com Player # 14 7

 Visualização (Logs, dados em")

 Amplamente usado (DARPA")



8 ROS/Gazebo ROS Sistema para controle de robôs móveis Suporta diversos tipos de robôs e sensores Orientado a serviços (publish/subscribe) Visualização (Logs, dados em tempo real) Pacotes: Implementações em Robótica Gazebo Simulador de alta fidelidade (integração c/ros) Ambientes em 3 dimensões (3D) Simulação Física (Cinemática) Amplamente usado (DARPA Robotics Challenge) # 15 MORSE MORSE Sistema para controle de robôs móveis: Terrestres, Aquáticos, Aéreos, Humanóides Suporta diversos tipos de robôs e sensores Usa o Blender (OpenGL-based Game Engine) para visualização/simulação 3D Usa scripts em Python Permite integração com o ROS #
.")
.")
9 Robô Móvel Modelo Básico 17 Robô Móvel Modelo Básico Sensores internos: observam o estado do robô (odometria, GPS, giroscópios). Câmera GPS Sensores externos: observam o estado do ambiente (câmeras, sonares, lasers). Laser Atuadores: alteram o estado do robô e do ambiente (rodas, pernas, garras). Sonares Odômetro (encoder) 18 9



10 Fluxo de desenvolvimento de software Simulação Testes em robôs de pequeno porte Testes em robôs de grande porte 19 Simulação Validação inicial dos algoritmos desenvolvidos utilizando simuladores de robôs e sensores. Vantagens: - Possibilidade irrestrita de experimentos - Economia de tempo de desenvolvimento - Evita danos aos robôs e sensores 20 10



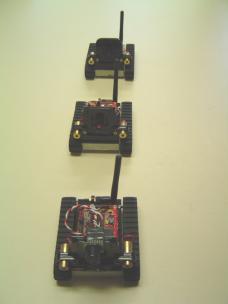
11 Testes em robôs de pequeno porte Validação do sistema em ambientes reais de escala reduzida. Vantagens: - Ambientes e informações reais para validação dos sistemas desenvolvidos - Facilita a logística dos experimentos - Diminui a chance de danos aos robôs e sensores 21 Fev Testes em robôs de pequeno porte 22 11


12 Testes em robôs de grande porte Validação do sistema em ambientes e situações reais. Características: - Ambientes e informações reais para validação dos sistemas desenvolvidos - Logística complexa - Possibilidade de danos aos robôs e sensores 23 Fev História do Player Projeto iniciado em 2000 na University of Southern California. Hoje em dia, seu core básico continua sendo desenvolvido pelos autores originais, apesar de diversos pesquisadores de diferentes instituições contribuem para o projeto. Atualmente, o Player é utilizado por diversas empresas e universidades em 5 continentes downloads por mês. # 24 12
13 Características do Player Software livre Modelo Cliente/Servidor Desenvolvido para sistemas Linux/Unix Comunicação baseada em sockets Clientes em: C, C++, Java, Python etc Interface de alto nível para acesso ao hardware Suporta grande quatidade de plataformas robóticas e sensores comerciais # 25 Programa de controle Camera Laser Sonar Odometria Motores PCI USB Serial Serial Canbus Programa do usuário Aquisição de dados dos sensores Comandos para os motores Planejamento Deslocamento desejado # 26 13



14 Player Camera PCI Player Programa do usuário Laser Sonar Odometria Motores USB Serial Serial Canbus Aquisição de dados dos sensores Comandos para o motor Planejamento Deslocamento desejado # 27 Abstração de hardware Hardware Do Robô Servidor Player Biblioteca Cliente do Player Simulador Stage Simulador Gazebo Servidor Player Servidor Player C/C++ C# Java Tcl Python Ruby Lisp Octave Programa do usuário # 28 14

15 Modelo Cliente/Servidor Clientes podem se conectar a múltiplos servidores Servidores aceitam conexão de múltiplos clientes Diferentes programas/processos/threads podem processar dados de diferentes sensores do mesmo servidor. Operação remota # 29 Gazebo - Simulação 3D # 30 15



16 Gazebo # 31 Simulação de Robôs Móveis Simulador 3D Gazebo 32 16


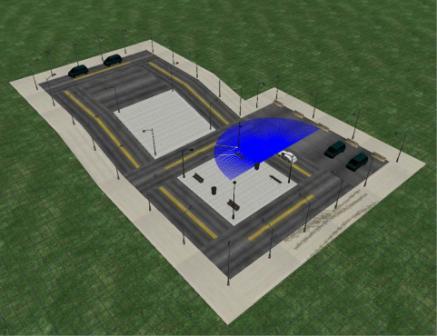

17 Simulação de Robôs Móveis Simulador 3D Gazebo 33 Simulação de Robôs Móveis Simulador 3D Gazebo 34 17



18 CaRINA Percepção Player/Stage 18




19 Gazebo Gazebo 19





![fosorio [at] { icmc.usp.br, gmail.com } 40 Fev.](/docs-images/78/77591605/images/20-5.jpg "2014 Disciplina de Web Disciplinas: br/~fosorio/")

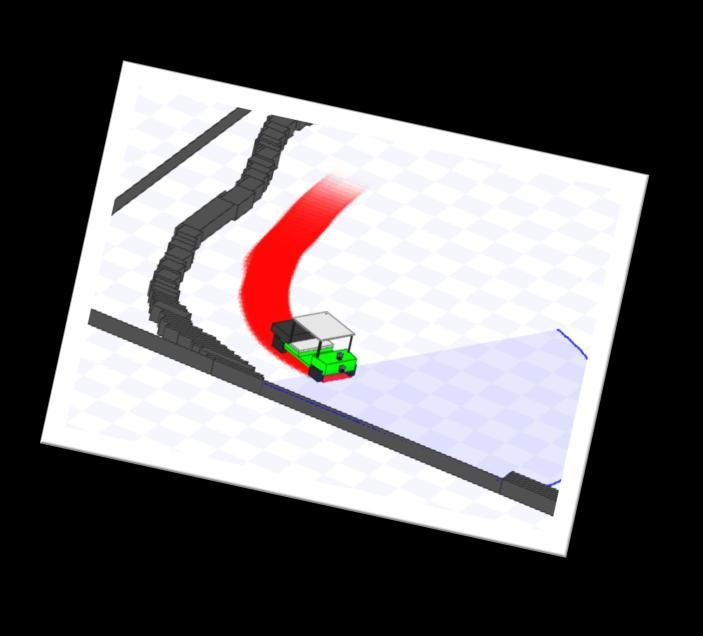
20 Player/Stage Empty Corridor Robot Laser Scan Obstacles: represented in black # 39 INFORMAÇÕES SOBRE A DISCIPLINA USP - Universidade de São Paulo - São Carlos, SP ICMC - Instituto de Ciências Matemáticas e de Computação SSC - Departamento de Sistemas de Computação Prof. Fernando Santos OSÓRIO - Laboratório LRM PAE Daniel Sales - Doutorado do LRM / ICMC Web institucional: Página pessoal: fosorio [at] { icmc.usp.br, gmail.com } 40 Fev Disciplina de Web Disciplinas: Wiki ICMC: > Programa, Material de Aulas, Critérios de Avaliação, > Material de Apoio, Trabalhos Práticos 20
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2012 Disciplina de SSC-0712 1 Março 2012 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Robótica Móvel. Simuladores de Robôs Móveis. Player/Stage/Gazebo. Localização Mapeamento SLAM Navegação. CSBC JAI # 3 Fundamentos
 Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Robótica Móvel Inteligente: Da Simulação às Aplicações no Mundo Real Denis Fernando Wolf Eduardo do Valle Simões Fernando Santos Osório Onofre Trindade Junior Universidade de São Paulo USP - ICMC Grupo
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Simulação de Robôs Móveis e Articulados: Aplicações e Prática. Fernando Santos Osório Rafael Alceste Berri
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Simulação de Robôs Móveis e Articulados Fernando
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2016 Disciplina de SSC-0715 Prof. Fernando Osório LRM / ICMC - USP Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Rafael Berri (Doutorando
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2015 Disciplina de SSC-0714 1 Abril 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação. Grupo de Sist. Embarcados, Evolutivos e Robóticos
 Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Aplicações em Robótica Móvel desenvolvidas junto ao LRM e ao * USP - Universidade de São Paulo ICMC SSC - Departamento de Sistemas de Computação Grupo de Pesquisa SEER - Sistemas Embarcados, Evolutivos
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Março 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
Robôs Móveis Autônomos
 USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório de Robótica Móvel
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2015 > 1o. Trimestre < 1 Março 2015 Disciplina de SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório de Robótica Móvel
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre Disciplina de Robôs Móveis Autônomos SSC-5888
 - 1o. Semestre Disciplina de Robôs Móveis Autônomos SSC-5888") USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2014 1 Maio 2014 Disciplina de SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC:
USP - ICMC - SSC Pós-Grad. CCMC SSC 5888 (RMA) - 1o. Semestre 2014 1 Maio 2014 Disciplina de SSC-5888 Prof. Fernando S. Osório - Grupo de Robótica Móvel LRM Laboratório de Robótica Móvel do ICMC-USP INCT-SEC:
Programação. Robô Guia em Museu. Robôs Móveis - Aplicações. Oportunidade de: IP addresses and the port numbers of the components. Avaliação.
 SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf [email protected] Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
SSC-712 Programação de Robôs Móveis SSC-712 Programação de Robôs Móveis Prof. Denis F. Wolf [email protected] Oportunidade de: - Desenvolver projetos complexos e multi-disciplinares - Ter contato prático
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
Disciplina de Programação de Robôs Móveis SSC-0712
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Fev. 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0712 (PRM) - 1o. Semestre 2015 Disciplina de SSC-0712 1 Fev. 2015 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiários
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática
 34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
34º JAI - Jornadas de Atualização em Informática Simulação de Robôs Móveis e Articulados: Aplicações e Prática Fernando Santos Osório Rafael Alceste Berri Introdução à Robótica Fernando Santos Osório Rafael
Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CPGEI/PPGCA - Robótica Móvel Experimentação Virtual
 Disciplina: CPGEI/PPGCA - Robótica Móvel Experimentação Virtual") Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CPGEI/PPGCA - Robótica Móvel Experimentação Virtual Prof. André Schneider de Oliveira Prof. João Alberto Fabro Experimentacao virtual São
Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CPGEI/PPGCA - Robótica Móvel Experimentação Virtual Prof. André Schneider de Oliveira Prof. João Alberto Fabro Experimentacao virtual São
Arquiteturas de Software
 Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
USP - ICMC - SSC SSC 0501-1o. Semestre 2011 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal:
Tipos de Robôs. Tipos de Robôs. Tipos de Robôs. Percepção Decisão Tipo de Mobilidade
 30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
30 Percepção Decisão Tipo de Mobilidade Ação - Base Fixa (manipuladores, braço robótico) - Base Móvel: Com Restrição (grua) / Sem Restrição (veículo) Tipo de Mecanismo de Locomoção - Pernas, Rodas, Esteiras,
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Computação para Engenharia Ambiental
 USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental 1 Outubro 2013 Prof. Dr. Fernando Santos Osório / Prof. Artur Lovato Cunha LRM - Laboratório
USP - ICMC - SSC SSC 0301-2o. Semestre 2013 Disciplina de Introdução à Computação para Engenharia Ambiental 1 Outubro 2013 Prof. Dr. Fernando Santos Osório / Prof. Artur Lovato Cunha LRM - Laboratório
CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA
 CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA 1. INTRODUÇÃO A robótica é uma ciência que se dedica a desenvolver dispositivos capazes de realizar tarefas automaticamente empregando
CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA 1. INTRODUÇÃO A robótica é uma ciência que se dedica a desenvolver dispositivos capazes de realizar tarefas automaticamente empregando
Disciplina de. Organização de Computadores Digitais
 USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Disciplina de. Organização de Computadores Digitais
 USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0511 - Sist. Informação - 2o. Semestre 2014 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
PERÍODO LETIVO ENGENHARIA DE COMPUTAÇÃO
 2 O SEMESTRE DE 2019 2 o PERÍODO LETIVO SMA0354 Cálculo II 760006 Física II SQM0405 Química Geral e Experimental 760006 Física II SMA0354 Cálculo II 7600110 Laboratório de Física Geral II Turmas aulas
2 O SEMESTRE DE 2019 2 o PERÍODO LETIVO SMA0354 Cálculo II 760006 Física II SQM0405 Química Geral e Experimental 760006 Física II SMA0354 Cálculo II 7600110 Laboratório de Física Geral II Turmas aulas
USP - ICMC - SSC SSC o. Semestre Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria
 USP - ICMC - SSC SSC 0101-1o. Semestre 2012 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria 1 Prof. Denis Wolf (Substituto: Fernando Osório) Email: { denis, fosorio } [at] { icmc. usp.
USP - ICMC - SSC SSC 0101-1o. Semestre 2012 Disciplina de Introdução à Ciência da Computação ICC 1 - Teoria 1 Prof. Denis Wolf (Substituto: Fernando Osório) Email: { denis, fosorio } [at] { icmc. usp.
Disciplina de Sensores Inteligentes SSC-0715
 USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0715 (SensInt) - 2o. Semestre 2010 Disciplina de SSC-0715 1 Prof. Fernando Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário PAE: Daniel Sales Web: http://www.icmc.usp.br/~fosorio/
Disciplina de. Robôs Móveis Autônomos SSC-0714
 USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
USP - ICMC - SSC LRM (Lab. de Robótica Móvel) SSC 0714 (RMA) - 1o. Semestre 2014 Disciplina de SSC-0714 1 Março 2014 Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Estagiário
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS
 CAMPUS DISTRITO ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Objetivo Geral Luan Leonardo Vieira de Moraes 1 Prof. Dr. José Pinheiro de Queiroz
CAMPUS DISTRITO ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Objetivo Geral Luan Leonardo Vieira de Moraes 1 Prof. Dr. José Pinheiro de Queiroz
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]
![Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]](/thumbs/70/62508108.jpg "Disciplina de Linguagem de Programação e Aplicações [ Eng. Elétrica / Automação ]") USP - ICMC - SSC SSC 0300-2o. Semestre 2013 Disciplina de [ Eng. Elétrica / Automação ] Prof. Dr. Fernando Santos Osório / PAE: Rafael Klaser (LRM / ICMC) LRM - Laboratório de Robótica Móvel do ICMC /
USP - ICMC - SSC SSC 0300-2o. Semestre 2013 Disciplina de [ Eng. Elétrica / Automação ] Prof. Dr. Fernando Santos Osório / PAE: Rafael Klaser (LRM / ICMC) LRM - Laboratório de Robótica Móvel do ICMC /
Disciplina SSC-5887 Introdução aos Sistemas Robóticos
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2012 Prof. Denis Wolf &
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2012 Disciplina SSC-5887 Prof. Fernando Osório - Prof. Denis Wolf Prof. Eduardo Simões - Prof. Onofre Trindade Jr. 1 Março 2012 Prof. Denis Wolf &
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Disciplina de Arquitetura de Computadores
 USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
USP - ICMC - SSC SSC 0510 - Informática - 2o. Semestre 2010 Disciplina de Prof. Fernando Santos Osório Email: fosorio [at] { icmc. usp. br, gmail. com } Página Pessoal: http://www.icmc.usp.br/~fosorio/
Um Ambiente Gráfico para Desenvolvimento de Software de Controle para Robôs Móveis Utilizando Simulação 3D
 Um Ambiente Gráfico para Desenvolvimento de Software de Controle para Robôs Móveis Utilizando Simulação 3D Cardoso Marchezi e Hans-Jorg Andreas Schneebeli VIII Simpósio Brasileiro de Automação Inteligente
Um Ambiente Gráfico para Desenvolvimento de Software de Controle para Robôs Móveis Utilizando Simulação 3D Cardoso Marchezi e Hans-Jorg Andreas Schneebeli VIII Simpósio Brasileiro de Automação Inteligente
Implementação de uma biblioteca gráfica multiplataforma utilizando OpenGL e GLFW.
 Universidade Federal de Uberlândia - UFU Faculdade de Computação Bacharelado em Sistemas de Informação Implementação de uma biblioteca gráfica multiplataforma utilizando OpenGL e GLFW. William Johnson
Universidade Federal de Uberlândia - UFU Faculdade de Computação Bacharelado em Sistemas de Informação Implementação de uma biblioteca gráfica multiplataforma utilizando OpenGL e GLFW. William Johnson
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP
LEI Nº.9, DE 9//00, PUBLICADA NO DOU DE 0//00, SEÇÃO I, PAGS. I - Rua São Luiz Gonzaga, s/n - São Luiz - Formiga - MG - CEP: 70-000 Tel: (7)-09 - Site: www.formiga.ifmg.edu.br Matriz Curricular FGGCOMP