Instituto Federal de Educação, Ciência e Tecnologia da Paraíba. Microcontrolador PIC 16F877
|
|
|
- Luciano Coradelli Brezinski
- 8 Há anos
- Visualizações:
Transcrição
1 Instituto Federal de Educação, Ciência e Tecnologia da Paraíba MINICURSO Microcontrolador PIC 16F877 Alison Lins de Lima Fábio Montenegro Pontes Jonathan B. da Silva Rafael Tavares Coutinho Thiago Pinto João Pessoa, 23 de Maio de 2010

2 Plano de Curso 1. Evolução da Tecnologia e Surgimento dos microcontroladores; 2. Teoria sobre Microcontrolador O que é um microcontrolador e onde se aplica; Diagrama de Blocos básico de um microcontrolador; Arquitetura e filosofia; 3. Memórias RAM ROM 4. Tipos de PIC (quanto à memória de programa) 5. PC e a Pilha 6. Interrupções 7. Polarização do Pic16F Alimentação 7.2 Circuitos Osciladores 8. Programação 8.1 Assembler C 9. Comandos Básicos 10. Estrutura básica de um código em C 11. Práticas 11.1 acionando um led 11.2 pisca pisca com led e variando a frequência; 11.3 Contador com Display de sete segmentos; Verificar a diferença do código para o ânodo comum e o cátodo comum; 11.4 Escrevendo em um LCD de 16x2; 11.5 Usando um botão, para acionar um led;

3 11.6 Usando um sensor para acionar um led; 11.7 Imprimindo uma variável no LCD, onde essa variável é o valor da porta. ANEXOS ANEXOS I - Arquitetura do PIC 16F877 ANEXOS II Organização e características das memórias do PIC 16F84 ANEXOS III - Pinagem do PIC 16F877 ANEXOS IV Gravação In Circuit

4 1. Evolução da Tecnologia e Surgimento dos microcontroladores; 2. Teoria sobre Microcontrolador 2.1. O que é um microcontrolador e onde podemos encontrá-lo. Def 1.: Podemos definir um microcontrolador com sendo um computador simplificado em um único circuito integrado, utilizado no controle de processos lógicos. (Entende-se como processo lógico o acionamento de leds, displays sete seguimentos, lcds, relés, sensores...) Def 2.: São circuitos integrados dotados internamente de um ULA (unidade lógica e aritmética), uma unidade de controle e conjunto de periféricos (ex.: contadores, temporizadores, portas I/O, memórias). Aplicações: Indústria Automobilística i) Injeção Eletrônica; ii) Fechaduras Eletrônicas; Empresas de Segurança i) Alarmes; ii) Sensores de movimentação; iii) Cercas Elétricas; Indústria de Telefonia i) Celulares ii) Binas iii) Centrais Telefônicas Robótica i) Robôs para competição e de uso geral Brinquedos i) Bonecos ii) Aeromodelismo Saúde i) Equipamentos Médicos Hospitalares 2.2. Diagrama de Blocos básico de um microcontrolador
, uma unidade de controle e conjunto de periféricos (ex.: contadores, temporizadores, portas I/O, memórias).")
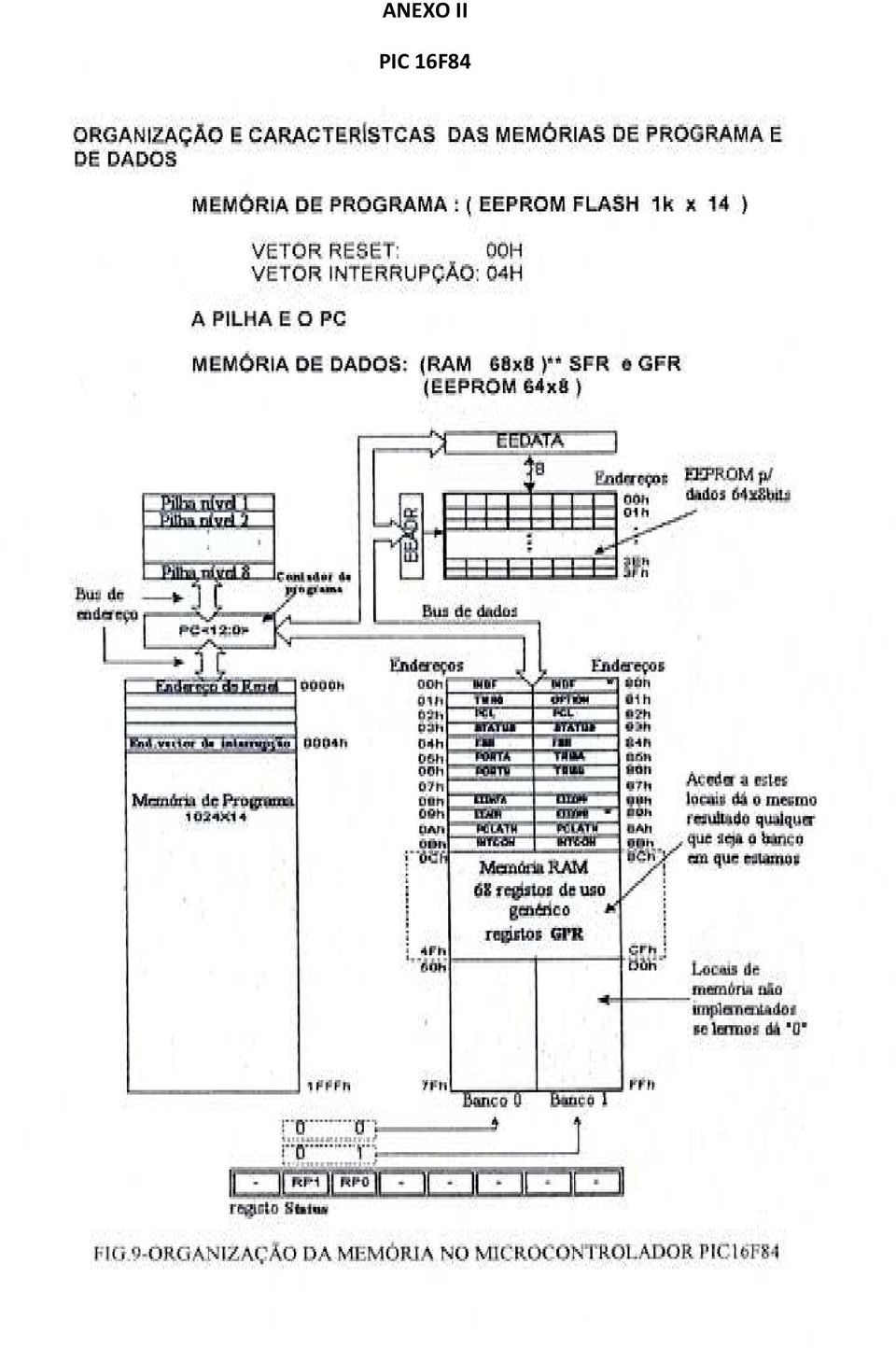
5 2.3. Arquitetura e filosofia Def.: São as partes que constitui o microcontrolador e como as mesmas estão interligadas. Von Neuman (CISC) - Primeiras arquiteturas pensadas para computadores. Harvard (RISC) HARVARD VON - NEUMAN As arquiteturas se diferenciam pela ligação da CPU com as memórias de dados e a de programa, na arquitetura de Harvard, a CPU esta conectada as memórias por barramentos separados o que permite o uso do conjunto de instruções (RISC), já na arquitetura de Von Neumann, a CPU esta conectada as memórias pelo mesmo barramento, isso demanda o uso de conjunto de instruções complexas (CISC). Obs.: Arquitetura do PIC 16F877, encontra-se nos anexos. 3. Memórias (VER ANEXO II) 3.1 RAM As memórias RAM são memória de uso temporário, voláteis os dados só permanecem na memória enquanto está ligada, quando a memória é desligada todos os dados são perdidos ROM São memória de gravação permanente, mesmo quando estão desligadas os dados permanecem guardados. Principais Características das memórias de programa e dados do PIC 16F877: Memória de Programa (Flash) 8k x 14 bits Memória de dados (Ram) 368 bytes Memória de dados (EEprom) 256 bytes
. Obs.: Arquitetura do PIC 16F877, encontra-se nos anexos. 3. Memórias (VER ANEXO II) 3.")
6 Memória de dados possui registradores de propósitos gerais (GFR) e de propósitos especiais (SFR). 4. Classificação dos PICs (quanto à memória de programa) PIC 16C711 C PROM, grava apenas uma vez. PIC 16CL7XX CL EPROM, grava por eletricidade e apaga por luz ultravioleta. PIC 16F877 F FLASH, grava e apaga por eletricidade.

7 5. PC e a Pilha PC é um registrador que aponta para o endereço da próxima instrução a ser executada. O PC tem 13bits, com isso pode endereçar 8k de memória. ç OBS.: A partir do PIC 16f84 o PC já possuía 13 bits, mesmo tendo uma memória de dados de 1k x 14 bits. A pilha é um registrador de oito níveis, no qual são guardados os endereços de retorno das rotinas de interrupções. endereço 3 endereço 2 endereço 1 Quando acontece a primeira interrupção, o endereço armazenado em PC vai para o primeiro nível da pilha, se por acaso acontece uma segunda interrupção então novamente o endereço que esta dentro do PC ocupa o primeiro nível da pilha e o endereço que antes ocupava o primeiro nível desce para o segundo, quando a interrupção 2 acaba, o endereço que esta no primeiro nível, é posto novamente no PC, que retorna para a posição em que havia parado na primeira interrupção, daí o endereço 1 volta para o primeiro nível da pilhar e daí por diante Interrupções É uma parada de emergência na execução de uma rotina, que ocorre por um fato interno ou externo e resulta na chamada de uma sub-rotina que começa ser executada e quando esta acaba o microcontrolador volta a executar a rotina principal. 7. Polarização do Pic16F877

8 8. Programação 8.1 Assembler É uma linguagem de baixo nível ou linguagem de máquina. Vantagem: Código com o menor tamanho que se pode escrever; Desvantagem: Cada microcontrolador tem seu conjunto de instruções; (Condição Péssima) 8.2 C É uma linguagem de alto nível mais fácil de aprender em relação ao assembler. Vantagem: facilidade no aprendizado e portável para outros microcontroladores; Desvantagem: código maior do que se o mesmo fosse programado em assembler. 9. Comandos Básicos de: Entrada Tratamento a BIT input (PIN_D0) input (PIN_D0) input _D() input _D() Tratamento a PORTA Saída Tratamento a BIT output_low(pin_d0) output_high(pin_d0) Loop for(i=0; i>0; i++) while(condição) do{ while(codição) switch / case Tratamento a PORTA output_d(valor) output_d(valor) for( ; ; ) loop infinito while(1) ou while(true) loop infinito Condicional if (condição){ else{ Atraso delay_ms(1000) delay_us(1000) 10. Estrutura Básica de um programa em C #include <16f877.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOLVP #use delay(clock= ) atraso em milisegundos atraso em microsegundos // inclusão da Biblioteca do microcontrolador // Palavras de configurações do microcontrolador // Valor do clock void main (){ // Corpo principal do programa comando 1 // comando 2 // Comandos comando 3 //

9 11. Práticas Acionando um led #include <16f877.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOLVP #use delay(clock= ) void main (){ output_high(pin_d0); Pisca pisca com led e variando a frequência #include <16f877.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOLVP #use delay(clock= ) void main (){ while(1){ output_high(pin_d0); delay_ms(1000); output_low(pin_d0); delay_ms(1000); Contador com Display de sete segmentos versão 1 #include <16f877.h> #fuses hs, NOLVP, NOWDT, NOPUT, NOPROTECT, NOBROWNOUT #Use delay(clock = ) void main(){ while(1){ output_b(0b ); // 1 delay_ms(1000); output_b(0b ); // 2 delay_ms(1000); output_b(0b ); // 3 delay_ms(1000); output_b(0b ); // 4 delay_ms(1000); output_b(0b ); // 5 delay_ms(1000); output_b(5); delay_ms(1000); output_b(6); delay_ms(1000); output_b(7); delay_ms(1000);

10 Contador com Display de sete segmentos versão 2 #include <16f877.h> #fuses HS,NOWDT,NOPROTECT,NOLVP #use delay(clock= ) byte const tabela[]={ 0b , 0b , 0b , 0b , 0b , 0b , 0b , 0b , 0b , 0b ; Void main(){ int t=500,valor = 0; while(true){ valor ++; if(valor>9) valor = 0; output_b (tabela[valor]); // apresenta o valor delay_ms(t); Escrevendo em um LCD de 16x2; #include <16f877.h> #include <regs_16f87x.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOPROTECT,NOLVP #use delay(clock= ) #include <bib_lcd_16x2_all.c> void main (){ ini_lcd_16x2(); while(true){ printf(exibe_lcd,"\f PET ENGENHARIA \n ELETRICA IFPB"); delay_ms(3000); printf(exibe_lcd,"\f OFERECE \n O MELHOR CURSO"); delay_ms(3000); printf(exibe_lcd,"\f DE \nmicrocontrolador"); delay_ms(3000);
![0b11100111 ; Void main(){ int t=500,valor = 0; while(true){ valor ++; if(valor>9) valor = 0; output_b (tabela[valor]); // apresenta o valor delay_ms(t); Escrevendo em um LCD de 16x2; #include <16f877.](/docs-images/54/15955914/images/page_10.jpg "h> #include <regs_16f87x.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOPROTECT,NOLVP #use delay(clock=20000000) #include <bib_lcd_16x2_all.")
11 Usando um botão, para acionar um led; #include <16f877.h> #fuses hs,nolvp,nobrownout,nowrt #use delay(clock= ) void main(){ while(true){ if(!input(pin_a0)) { // se a0 for pressionado acende o led output_high(pin_d0); if(!input(pin_a1)){ // se a0 for pressionado desliga o led output_low(pin_d0); Usando um sensor para acionar um led; O código é semelhante ao anterior, a mudança acontece apenas no hardware, ao invés de usarmos um botão na entrada iremos utilizar um sensor. Escrevendo uma variável no LCD. (variável inteira) #include <16f877.h> #include <regs_16f87x.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOPROTECT,NOLVP #use delay(clock= ) #include <bib_lcd_16x2_all.c> int valor; void main (){ ini_lcd_16x2(); valor = 0; while(true){ printf(exibe_lcd,"\f teste %d",valor); delay_ms(100); valor++;
 #include <16f877.h> #include <regs_16f87x.")
12 Imprimindo uma variável no LCD, onde essa variável é o valor da porta. #include <16f877.h> #include <regs_16f87x.h> #fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOPROTECT,NOLVP #use delay(clock= ) #include <bib_lcd_16x2_all.c> int valor; void main (){ ini_lcd_16x2(); valor = 0; while(true){ valor = input(pin_a0); if(input(pin_a0)) { // se a0 for pressionado acende o led output_high(pin_e2); printf(exibe_lcd,"\f teste %d",valor); delay_ms(100);
{ ini_lcd_16x2(); valor = 0; while(true){ valor = input(pin_a0); if(input(pin_a0)) {")
13 ENTRADA E SAÍDA Chave LED TRM0 0 TRM1 1 CH0 2 INT 3 CH1 4 Obs.: os LEDs e as chaves são baixo ativos. Modo Padrão (mais simples) #include <16F871.H #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP #use delay(clock= ) void main (void){ for(;;){ //loop infinito if(!input(pin_a4)) output_low(pin_d0); else output_high(pin_d0); if(!input(pin_c0)) output_low(pin_d1); else output_high(pin_d1); if(!input(pin_c1)) output_low(pin_d2); else output_high(pin_d2); if(!input(pin_b0)) output_low(pin_d3); else output_high(pin_d3); if(!input(pin_e2)) output_low(pin_d4); else output_high(pin_d4); Modo Direto #include <16F871.H> // arquivo de definições do microcontrolador usado #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP // bits de configuração #use delay(clock= ) // informa ao sistema o frequência de clock, para temporização // Endereços dos portais #byte PORTA=0x05 #byte PORTB=0x06 #byte PORTC=0x07 #byte PORTD=0x08 #byte PORTE=0x09
) output_low(pin_d4); else output_high(pin_d4); Modo Direto #include <16F871.")
14 // Entradas #bit CH_TMR0 = PORTA.4 #bit CH_TMR1 = PORTC.0 #bit CH_0 = PORTC.1 #bit CH_INT = PORTB.0 #bit CH_1 = PORTE.2 // Saídas #bit LED0 = PORTD.0 #bit LED1 = PORTD.1 #bit LED2 = PORTD.2 #bit LED3 = PORTD.3 #bit LED4 = PORTD.4 void main (void) { set_tris_d(0xe0); // configuração direcional: os 5 LSbits do portal D são saídas for(;;){ //loop infinito if(!ch_tmr0) LED0 = 0; else LED0 = 1; if(!ch_tmr1) LED1 = false; else LED1 = true; if(!ch_0) LED2 = false; else LED2 = true; if(!ch_int) LED3 = false; else LED3 = true; if(!ch_1) LED4 = false; else LED4 = true; Modo Fixo #include <16F871.H> // arquivo de definições do microcontrolador usado #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP // bits de configuração #use fixed_io(d_outputs = PIN_D0,PIN_D1,PIN_D2,PIN_D3,PIN_D4) // saídas da porta D. Os demais são entradas #use delay(clock= ) // informa ao sistema o frequência de clock, para temporização // Entradas #DEFINE CH_TMR0 PIN_A4 #DEFINE CH_TMR1 PIN_C0 #DEFINE CH_0 PIN_C1 #DEFINE CH_INT PIN_B0 #DEFINE CH_1 PIN_E2
 LED4 = false; else LED4 = true; Modo Fixo #include <16F871.")
15 // Saídas #DEFINE LED0 PIN_D0 #DEFINE LED1 PIN_D1 #DEFINE LED2 PIN_D2 #DEFINE LED3 PIN_D3 #DEFINE LED4 PIN_D4 void main (void) { for(;;){ //loop infinito if(!input(ch_tmr0)) output_low(led0); else output_high(led0); if(!input(ch_tmr1)) output_low(led1); else output_high(led1); if(!input(ch_0)) output_low(led2); else output_high(led2); if(!input(ch_int)) output_low(led3); else output_high(led3); if(!input(ch_1)) output_low(led4); else output_high(led4); Modo Rápido #include <16F871.H #fuses HS,NOWDT,PUT,NOBROWNOUT,NOLVP #use fast_io(a) #use fast_io(b) #use fast_io(c) #use fast_io(d) #use fast_io(e) // acesso ao portal A feito pelo modo rápido // acesso ao portal B feito pelo modo rápido // acesso ao portal C feito pelo modo rápido // acesso ao portal D feito pelo modo rápido // acesso ao portal E feito pelo modo rápido #use delay(clock= ) // Entradas #DEFINE CH_TMR0 PIN_A4 #DEFINE CH_TMR1 PIN_C0 #DEFINE CH_0 PIN_C1 #DEFINE CH_INT PIN_B0 #DEFINE CH_1 PIN_E2 // Saídas #DEFINE LED0 PIN_D0 #DEFINE LED1 PIN_D1
 #use fast_io(b) #use fast_io(c) #use fast_io(d) #use fast_io(e) // acesso ao portal A feito pelo modo rápido // acesso ao portal B feito pelo")
16 #DEFINE LED2 PIN_D2 #DEFINE LED3 PIN_D3 #DEFINE LED4 PIN_D4 void main (void) { set_tris_d(0xe0); // configuração direcional: os 5 LSbits do portal D são saídas for(;;){ if(!input(ch_tmr0)) output_low(led0); else output_high(led0); if(!input(ch_tmr1)) output_low(led1); else output_high(led1); if(!input(ch_0)) output_low(led2); else output_high(led2); if(!input(ch_int)) output_low(led3); else output_high(led3); if(!input(ch_1)) output_low(led4); else output_high(led4); Controlando o brilho do LED com o Módulo PWM #include<16f877a.h> #device adc=10 #fuses HS,NOWDT,NOLVP,NOBROWNOUT #use delay(clock= ) void main (void){ long int ciclo = 0; setup_timer_2 (T2_DIV_BY_1,0xff,1); // 4 khz setup_ccp1 (ccp_pwm); set_pwm1_duty (0); while(1){ //loop infinito for(ciclo = 0;ciclo<=500;ciclo+=10){ set_pwm1_duty(ciclo); delay_ms(70); for(ciclo = 500;ciclo>=0;ciclo-=10){ set_pwm1_duty(ciclo); delay_ms(70); U1 OSC1/CLKIN RB0/INT OSC2/CLKOUT RB1 MCLR/Vpp/THV RB2 RB3/PGM RA0/AN0 RB4 RA1/AN1 RB5 RA2/AN2/VREF- RB6/PGC RA3/AN3/VREF+ RB7/PGD RA4/T0CKI RA5/AN4/SS RC0/T1OSO/T1CKI RC1/T1OSI/CCP2 RE0/AN5/RD RC2/CCP1 RE1/AN6/WR RC3/SCK/SCL RE2/AN7/CS RC4/SDI/SDA RC5/SDO RC6/TX/CK RC7/RX/DT RD0/PSP0 RD1/PSP1 RD2/PSP2 RD3/PSP3 RD4/PSP4 RD5/PSP5 RD6/PSP6 RD7/PSP7 PIC16F D1 LED-RED
 void main (void){ long int ciclo = 0; setup_timer_2 (T2_DIV_BY_1,0xff,1); // 4 khz setup_ccp1 (ccp_pwm); set_pwm1_duty")
17
18 ANEXOS

19 ANEXO I Arquitetura do PIC16F877

20 ANEXO II PIC 16F84
21 ANEXO III PINAGEM 16F877
22 ANEXO IV
Curso de Linguagem C. Rinaldo Câmara Gonçalves Labtools Mosaico Didactic Division Revisão 2
 Curso de Linguagem C Rinaldo Câmara Gonçalves Labtools Mosaico Didactic Division Revisão 2 Sumário SUMÁRIO...3 RECURSOS BÁSICOS: EXEMPLO 1 BOTÃO E LED...5 RECURSOS DO LIVRO...5 LÓGICA DO EXEMPLO...5 ESQUEMA
Curso de Linguagem C Rinaldo Câmara Gonçalves Labtools Mosaico Didactic Division Revisão 2 Sumário SUMÁRIO...3 RECURSOS BÁSICOS: EXEMPLO 1 BOTÃO E LED...5 RECURSOS DO LIVRO...5 LÓGICA DO EXEMPLO...5 ESQUEMA
Circuitos de Memória: Tipos e Funcionamento. Fabrício Noveletto
 Circuitos de Memória: Tipos e Funcionamento Fabrício Noveletto Memória de semicondutores São dispositivos capazes de armazenar informações digitais. A menor unidade de informação que pode ser armazenada
Circuitos de Memória: Tipos e Funcionamento Fabrício Noveletto Memória de semicondutores São dispositivos capazes de armazenar informações digitais. A menor unidade de informação que pode ser armazenada
Prática 8: Comunicação SPI. 8.1 Introdução e objetivos. 8.2 Princípios básicos do protocolo SPI
 Prática 8: 8.1 Introdução e objetivos Comunicação SPI O protocolo SPI (serial peripheral interface) é um método de comunicação utilizado para interconectar dispositivos ou chips de tal forma que estes
Prática 8: 8.1 Introdução e objetivos Comunicação SPI O protocolo SPI (serial peripheral interface) é um método de comunicação utilizado para interconectar dispositivos ou chips de tal forma que estes
Sistemas Microcontrolados
 Sistemas Microcontrolados Uma Abordagem com o Microcontrolador PIC 16F84 Nardênio Almeida Martins Novatec Editora Capítulo 1 Introdução Os microcontroladores estão presentes em quase tudo o que envolve
Sistemas Microcontrolados Uma Abordagem com o Microcontrolador PIC 16F84 Nardênio Almeida Martins Novatec Editora Capítulo 1 Introdução Os microcontroladores estão presentes em quase tudo o que envolve
Multiplexando displays de 7 segmentos com PIC16F877A
 Multiplexando displays de 7 segmentos com PIC16F877A A ligação de vários displays de 7 segmentos nos PICs podem ser feitas de diversas meneiras, uma bastante interessante é a que se segue. A ligação de
Multiplexando displays de 7 segmentos com PIC16F877A A ligação de vários displays de 7 segmentos nos PICs podem ser feitas de diversas meneiras, uma bastante interessante é a que se segue. A ligação de
Suporta os microcontroladores: R. Leonardo da Vinci, 883 - Campinas/SP CEP 13.077-009 F.: (19) 4141.3351 / 3304.1605
 4141.3351 / 3304.1605") Suporta os microcontroladores: PIC16F877A, PIC18F452, PIC18F4520, PIC18F4550, PIC 18F876A, PIC18F252, PIC18F2550 e outros com 28 e 40 pinos O Kit de desenvolvimento ACEPIC PRO V2.0 foi projetado tendo
Suporta os microcontroladores: PIC16F877A, PIC18F452, PIC18F4520, PIC18F4550, PIC 18F876A, PIC18F252, PIC18F2550 e outros com 28 e 40 pinos O Kit de desenvolvimento ACEPIC PRO V2.0 foi projetado tendo
Programação Arduino Developer. Subtítulo
 Programação Arduino Developer Subtítulo Sobre a APTECH A Aptech é uma instituição global, modelo em capacitação profissional, que dispõe de diversos cursos com objetivo de preparar seus alunos para carreiras
Programação Arduino Developer Subtítulo Sobre a APTECH A Aptech é uma instituição global, modelo em capacitação profissional, que dispõe de diversos cursos com objetivo de preparar seus alunos para carreiras
Programação em BASIC para o PIC Mostrando Mensagens no Display LCD Vitor Amadeu Souza
 Programação em BASIC para o PIC Mostrando Mensagens no Display LCD Vitor Amadeu Souza Introdução Nesta terceira série de artigos que aborda a programação na linguagem BASIC para o microcontrolador PIC,
Programação em BASIC para o PIC Mostrando Mensagens no Display LCD Vitor Amadeu Souza Introdução Nesta terceira série de artigos que aborda a programação na linguagem BASIC para o microcontrolador PIC,
Introdução. Hardware (Parte II) Universidade Federal de Campina Grande Departamento de Sistemas e Computação. joseana@computacao.ufcg.edu.
 Universidade Federal de Campina Grande Departamento de Sistemas e Computação. joseana@computacao.ufcg.edu.") Universidade Federal de Campina Grande Departamento de Sistemas e Computação Introdução à Computação Hardware (Parte II) Prof. a Joseana Macêdo Fechine Régis de Araújo joseana@computacao.ufcg.edu.br Carga
Universidade Federal de Campina Grande Departamento de Sistemas e Computação Introdução à Computação Hardware (Parte II) Prof. a Joseana Macêdo Fechine Régis de Araújo joseana@computacao.ufcg.edu.br Carga
Programação Básica em Arduino Aula 2
 Programação Básica em Arduino Aula 2 Execução: Laboratório de Automação e Robótica Móvel Variáveis são lugares (posições) na memória principal que servem para armazenar dados. As variáveis são acessadas
Programação Básica em Arduino Aula 2 Execução: Laboratório de Automação e Robótica Móvel Variáveis são lugares (posições) na memória principal que servem para armazenar dados. As variáveis são acessadas
Figura 01 Visão Geral da Placa
 1. Hardware O kit de FPGA é formado por periféricos que possibilitam sua interação com sinais de áudio, display gráfico e alfanumérico, comunicação serial e USB, codec de áudio, chaves para simulação e
1. Hardware O kit de FPGA é formado por periféricos que possibilitam sua interação com sinais de áudio, display gráfico e alfanumérico, comunicação serial e USB, codec de áudio, chaves para simulação e
Interrupções e timers
 Prática 3: 3.1 Introdução e objetivos Interrupções e timers Na prática anterior foi visto que a função main fica continuamente monitorando o teclado avaliando se alguma tecla foi pressionada através da
Prática 3: 3.1 Introdução e objetivos Interrupções e timers Na prática anterior foi visto que a função main fica continuamente monitorando o teclado avaliando se alguma tecla foi pressionada através da
Introdução à Engenharia de Computação
 Introdução à Engenharia de Computação Tópico: Organização Básica de um Computador Digital Introdução à Engenharia de Computação 2 Componentes de um Computador Computador Eletrônico Digital É um sistema
Introdução à Engenharia de Computação Tópico: Organização Básica de um Computador Digital Introdução à Engenharia de Computação 2 Componentes de um Computador Computador Eletrônico Digital É um sistema
PLANO DE ENSINO-APRENDIZAGEM 1º Semestre de 2009
 Departamento: Mecânica PLANO DE ENSINO-APRENDIZAGEM 1º Semestre de 2009 Disciplina: MICROPROCESSADORES I Modalidade.: Mecânica de Precisão Carga Horária Semanal: 04 horasaulas Carga Horária Total: 72 horas-aulas
Departamento: Mecânica PLANO DE ENSINO-APRENDIZAGEM 1º Semestre de 2009 Disciplina: MICROPROCESSADORES I Modalidade.: Mecânica de Precisão Carga Horária Semanal: 04 horasaulas Carga Horária Total: 72 horas-aulas
7. Técnicas de Programação
 7. Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP 7.1 Fluxograma Definições Início/Fim Sub-rotinas Tomada de decisão Terminação 7.1 Fluxograma Exercícios Ex.1: Testa um botão e acende
7. Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP 7.1 Fluxograma Definições Início/Fim Sub-rotinas Tomada de decisão Terminação 7.1 Fluxograma Exercícios Ex.1: Testa um botão e acende
Aula 2. - Elaboração de algoritmos/fluxogramas. - Gravação do programa no microcontrolador
 Aula 2 - Elaboração de algoritmos/fluxogramas - Set de instruções do 8051 - Programação em Assembly - Gravação do programa no microcontrolador - Simulação Exercícios da aula passada... 1) Converta os números
Aula 2 - Elaboração de algoritmos/fluxogramas - Set de instruções do 8051 - Programação em Assembly - Gravação do programa no microcontrolador - Simulação Exercícios da aula passada... 1) Converta os números
Sistemas Embarcados. Introdução aos sistemas embarcados
 Sistemas Embarcados Introdução aos sistemas embarcados Introdução aos Sistemas embarcados Definição de um sistema embarcado Exemplos de sistemas embarcados Processadores utilizados em sistemas embarcados
Sistemas Embarcados Introdução aos sistemas embarcados Introdução aos Sistemas embarcados Definição de um sistema embarcado Exemplos de sistemas embarcados Processadores utilizados em sistemas embarcados
PIC18F4550. Curso Engenharia de Controle e Automação. Alex Vidigal Bastos www.decom.ufop.br/alex/ alexvbh@gmail.com
 PIC18F4550 Curso Engenharia de Controle e Automação Alex Vidigal Bastos www.decom.ufop.br/alex/ alexvbh@gmail.com 1 Agenda Características do PIC18F4550 Pinagem do PIC18F4550 Pinagem do PIC18F4550 Datasheet
PIC18F4550 Curso Engenharia de Controle e Automação Alex Vidigal Bastos www.decom.ufop.br/alex/ alexvbh@gmail.com 1 Agenda Características do PIC18F4550 Pinagem do PIC18F4550 Pinagem do PIC18F4550 Datasheet
Comunicação Serial com o AVR ATMEGA8
 Comunicação Serial com o AVR ATMEGA8 Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução Os microcontroladores AVR vem a cada dia tomando cada vez mais espaço nos novos projetos eletrônicos microcontrolados.
Comunicação Serial com o AVR ATMEGA8 Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução Os microcontroladores AVR vem a cada dia tomando cada vez mais espaço nos novos projetos eletrônicos microcontrolados.
Cerne Tecnologia e Treinamento
 Tecnologia e Treinamento Tutorial de Instalação da Placa de Catraca Skype: cerne-tec MSN: cerne-tec@hotmail.com (21)4063-9798 (11)4063-1877 www.cerne-tec.com.br Kits Didáticos e Gravadores da Cerne Tecnologia
Tecnologia e Treinamento Tutorial de Instalação da Placa de Catraca Skype: cerne-tec MSN: cerne-tec@hotmail.com (21)4063-9798 (11)4063-1877 www.cerne-tec.com.br Kits Didáticos e Gravadores da Cerne Tecnologia
Programação em BASIC para o PIC Vitor Amadeu Souza
 Programação em BASIC para o PIC Vitor Amadeu Souza Introdução Continuando com a série do último artigo, hoje veremos os passos para o desenvolvimento de uma minuteria com o microcontrolador PIC18F1220
Programação em BASIC para o PIC Vitor Amadeu Souza Introdução Continuando com a série do último artigo, hoje veremos os passos para o desenvolvimento de uma minuteria com o microcontrolador PIC18F1220
Organização de Computadores Como a informação é processada?
 Curso de ADS/DTEE/IFBA Organização de Computadores Como a informação é processada? Prof. Antonio Carlos Referências Bibliográficas: 1. Ciência da Computação: Uma visão abrangente - J.Glenn Brokshear 2.
Curso de ADS/DTEE/IFBA Organização de Computadores Como a informação é processada? Prof. Antonio Carlos Referências Bibliográficas: 1. Ciência da Computação: Uma visão abrangente - J.Glenn Brokshear 2.
Desenvolvendo Projetos em BASIC para o Microcontrolador AT89S8252. Com base no BASCOM - Teoria e Prática. Autor: Vitor Amadeu Souza
 Desenvolvendo Projetos em BASIC para o Microcontrolador AT89S8252 Com base no BASCOM - Teoria e Prática Autor: Vitor Amadeu Souza Dedicatória Dedico este livro a minha querida noiva Renata Leal. Que preciosos
Desenvolvendo Projetos em BASIC para o Microcontrolador AT89S8252 Com base no BASCOM - Teoria e Prática Autor: Vitor Amadeu Souza Dedicatória Dedico este livro a minha querida noiva Renata Leal. Que preciosos
TUTORIAL ROBÔ CACO ROBÔ PARA MOVIMENTAÇÃO EM LABIRINTO UNIVERSIDADE FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO EM INFORMÁTICA
 TUTORIAL ROBÔ CACO ROBÔ PARA MOVIMENTAÇÃO EM LABIRINTO UNIVERSIDADE FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO EM INFORMÁTICA 18 de dezembro de 2013 Elaboração: Carlos Eduardo Magrin cmagrin@gmail.com
TUTORIAL ROBÔ CACO ROBÔ PARA MOVIMENTAÇÃO EM LABIRINTO UNIVERSIDADE FEDERAL DO PARANÁ PROGRAMA DE PÓS-GRADUAÇÃO EM INFORMÁTICA 18 de dezembro de 2013 Elaboração: Carlos Eduardo Magrin cmagrin@gmail.com
Sistemas Microcontrolados
 Sistemas Microcontrolados Aula 4: Programação em C para PIC Marco Jose da Silva mdasilva@utfpr.edu.br Compiladores C para PICs C18 HI-TECH CCS IAR MikroC http://www.microchip.com/ http://www.htsoft.com/
Sistemas Microcontrolados Aula 4: Programação em C para PIC Marco Jose da Silva mdasilva@utfpr.edu.br Compiladores C para PICs C18 HI-TECH CCS IAR MikroC http://www.microchip.com/ http://www.htsoft.com/
O COMPUTADOR. Introdução à Computação
 O COMPUTADOR Introdução à Computação Sumário O Hardware O Software Linguagens de Programação Histórico da Linguagem C Componentes Básicos do Computador O HARDWARE: O equipamento propriamente dito. Inclui:
O COMPUTADOR Introdução à Computação Sumário O Hardware O Software Linguagens de Programação Histórico da Linguagem C Componentes Básicos do Computador O HARDWARE: O equipamento propriamente dito. Inclui:
SENSOR DE LUMINOSIDADE Com indicador de intervalo
 SENSOR DE LUMINOSIDADE Com indicador de intervalo Este projeto refere-se à construção de um sensor de luminosidade com o uso de um LDR (Light Dependent Resistor), com as seguintes características: 1. Luminosidade
SENSOR DE LUMINOSIDADE Com indicador de intervalo Este projeto refere-se à construção de um sensor de luminosidade com o uso de um LDR (Light Dependent Resistor), com as seguintes características: 1. Luminosidade
Memórias. O que são Memórias de Semicondutores? São componentes capazes de armazenar informações Binárias (0s e 1s)
") Memórias O que são Memórias de Semicondutores? São componentes capazes de armazenar informações Binárias (0s e 1s) Essas informações são guardadas eletricamente em células individuais. Chamamos cada elemento
Memórias O que são Memórias de Semicondutores? São componentes capazes de armazenar informações Binárias (0s e 1s) Essas informações são guardadas eletricamente em células individuais. Chamamos cada elemento
ORGANIZAÇÃO BÁSICA DE COMPUTADORES E LINGUAGEM DE MONTAGEM
 Linguagem de programação Linguagem de Alto Nível próximo ao ser humano, escrita de forma textual. Ex: if (a==b) a=b+c; Linguagem de Montagem (Assembly) próximo à linguagem de máquina, escrita em códigos
Linguagem de programação Linguagem de Alto Nível próximo ao ser humano, escrita de forma textual. Ex: if (a==b) a=b+c; Linguagem de Montagem (Assembly) próximo à linguagem de máquina, escrita em códigos
Organização de Computadores 1
 Organização de Computadores 1 5 CONJUNTO DE INSTRUÇÕES Prof. Luiz Gustavo A. Martins Introdução O que é um conjunto de instruções? Coleção completa das instruções que a CPU é capaz de executar (entende).
Organização de Computadores 1 5 CONJUNTO DE INSTRUÇÕES Prof. Luiz Gustavo A. Martins Introdução O que é um conjunto de instruções? Coleção completa das instruções que a CPU é capaz de executar (entende).
QSPIC40 Manual do usuário Ver 1.0
 QSPIC40 Manual do usuário Ver 1.0 Introdução: É um excelente kit de microcontrolador da família PIC18F e PIC16F da Microchip. O kit QSPIC40 é um kit de desenvolvimento e aprendizagem utilizando microcontroladores
QSPIC40 Manual do usuário Ver 1.0 Introdução: É um excelente kit de microcontrolador da família PIC18F e PIC16F da Microchip. O kit QSPIC40 é um kit de desenvolvimento e aprendizagem utilizando microcontroladores
Projeto No. 11 Display de Leds de 7 Segmentos
 Projeto No. 11 Display de Leds de 7 Segmentos O objetivo deste projeto é demonstrar a utilização do display de led de 7 segmentos controlado diretamente a partir das portas do Arduino. Material necessário:
Projeto No. 11 Display de Leds de 7 Segmentos O objetivo deste projeto é demonstrar a utilização do display de led de 7 segmentos controlado diretamente a partir das portas do Arduino. Material necessário:
www.cerne-tec.com.br
 1 Cerne Tecnologia e Treinamento Apostila de Programação para a Família HC908 Com base no microcontrolador MC68HC908QY4 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com
1 Cerne Tecnologia e Treinamento Apostila de Programação para a Família HC908 Com base no microcontrolador MC68HC908QY4 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com
Disciplina: Introdução à Engenharia da Computação
 Colegiado de Engenharia de Computação Disciplina: Introdução à Engenharia da Computação Aulas 10 (semestre 2011.2) Prof. Rosalvo Ferreira de Oliveira Neto, M.Sc. rosalvo.oliveira@univasf.edu.br 2 Hardware
Colegiado de Engenharia de Computação Disciplina: Introdução à Engenharia da Computação Aulas 10 (semestre 2011.2) Prof. Rosalvo Ferreira de Oliveira Neto, M.Sc. rosalvo.oliveira@univasf.edu.br 2 Hardware
APOSTILA DE: PROGRAMAÇÃO DE MICROCONTROLADORES PIC USANDO LINGUAGEM C
 CENTRO FEDERAL DE EDUCAÇÃO TECNOLOGICA DO ESPIRITO SANTO UNED SERRA / AUTOMAÇÃO INDUSTRIAL APOSTILA DE: PROGRAMAÇÃO DE MICROCONTROLADORES PIC USANDO LINGUAGEM C PROF: MARCO ANTONIO VITORIA, AGOSTO 2006
CENTRO FEDERAL DE EDUCAÇÃO TECNOLOGICA DO ESPIRITO SANTO UNED SERRA / AUTOMAÇÃO INDUSTRIAL APOSTILA DE: PROGRAMAÇÃO DE MICROCONTROLADORES PIC USANDO LINGUAGEM C PROF: MARCO ANTONIO VITORIA, AGOSTO 2006
1. CAPÍTULO COMPUTADORES
 1. CAPÍTULO COMPUTADORES 1.1. Computadores Denomina-se computador uma máquina capaz de executar variados tipos de tratamento automático de informações ou processamento de dados. Os primeiros eram capazes
1. CAPÍTULO COMPUTADORES 1.1. Computadores Denomina-se computador uma máquina capaz de executar variados tipos de tratamento automático de informações ou processamento de dados. Os primeiros eram capazes
PIC16F628a. Pinagem do PIC16F628a:
 PIC16F628a O PIC16F628a é um microcontrolador fabricado pela Microchip Technology (www.microchip.com), com as seguintes características: - composto de 18 pinos; - possui somente 35 instruções no seu microcódigo;
PIC16F628a O PIC16F628a é um microcontrolador fabricado pela Microchip Technology (www.microchip.com), com as seguintes características: - composto de 18 pinos; - possui somente 35 instruções no seu microcódigo;
Introdução à Sistemas Operacionais. Glauber Magalhães Pires
 Introdução à Sistemas Operacionais Glauber Magalhães Pires Agenda O que são sistemas operacionais? Histórico Primeira geração (1945-1955) Segunda geração (1955-1965) Terceira geração (1965-1980) Quarta
Introdução à Sistemas Operacionais Glauber Magalhães Pires Agenda O que são sistemas operacionais? Histórico Primeira geração (1945-1955) Segunda geração (1955-1965) Terceira geração (1965-1980) Quarta
Estrutura de um Computador
 SEL-0415 Introdução à Organização de Computadores Estrutura de um Computador Aula 7 Prof. Dr. Marcelo Andrade da Costa Vieira MODELO DE VON NEUMANN PRINCÍPIOS A arquitetura de um computador consiste de
SEL-0415 Introdução à Organização de Computadores Estrutura de um Computador Aula 7 Prof. Dr. Marcelo Andrade da Costa Vieira MODELO DE VON NEUMANN PRINCÍPIOS A arquitetura de um computador consiste de
AULA: Introdução à informática Computador Digital
 Campus Muriaé Professor: Luciano Gonçalves Moreira Disciplina: Informática Aplicada AULA: Introdução à informática Computador Digital Componentes de um computador digital : Hardware Refere-se às peças
Campus Muriaé Professor: Luciano Gonçalves Moreira Disciplina: Informática Aplicada AULA: Introdução à informática Computador Digital Componentes de um computador digital : Hardware Refere-se às peças
17. Espaço de I/O (entrada/saída)... 17 2 17.1 Portos paralelos de entrada e saída... 17 2 17.1.1 Porto paralelo de saída... 17 2 17.1.
... 17 2 17.1 Portos paralelos de entrada e saída... 17 2 17.1.1 Porto paralelo de saída... 17 2 17.1.") 17. Espaço de I/O (entrada/saída)... 17 2 17.1 Portos paralelos de entrada e saída... 17 2 17.1.1 Porto paralelo de saída... 17 2 17.1.2 Porto paralelo de entrada... 17 3 17.1.3 Exercício... 17 3 17.2
17. Espaço de I/O (entrada/saída)... 17 2 17.1 Portos paralelos de entrada e saída... 17 2 17.1.1 Porto paralelo de saída... 17 2 17.1.2 Porto paralelo de entrada... 17 3 17.1.3 Exercício... 17 3 17.2
Acetatos de apoio às aulas teóricas
 Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 24 de Outubro de 2004 Microprocessadores
Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 24 de Outubro de 2004 Microprocessadores
Introdução à estrutura e funcionamento de um Sistema Informático
 Introdução à estrutura e funcionamento de um Sistema Informático Elementos que constituem o Computador O funcionamento do computador é possível devido aos vários elementos interligados que o constituem:
Introdução à estrutura e funcionamento de um Sistema Informático Elementos que constituem o Computador O funcionamento do computador é possível devido aos vários elementos interligados que o constituem:
Autor: Tiago Lone Nível: Básico Criação: 19/12/2005 Última versão: 18/12/2006. PdP. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Barra de LEDs Autor: Tiago Lone Nível: Básico Criação: 19/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Barra de LEDs Autor: Tiago Lone Nível: Básico Criação: 19/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
Os dispositivos lógicos programáveis (PLD Programmable Logic Device) são circuitos integrados programáveis pelo usuário, que
 são circuitos integrados programáveis pelo usuário, que") Dispositivos Lógicos Programáveis (PLD) Os dispositivos lógicos programáveis (PLD Programmable Logic Device) são circuitos integrados programáveis pelo usuário, que possui um grande número de portas lógicas
Dispositivos Lógicos Programáveis (PLD) Os dispositivos lógicos programáveis (PLD Programmable Logic Device) são circuitos integrados programáveis pelo usuário, que possui um grande número de portas lógicas
Arquitetura de Computadores. Tipos de Instruções
 Arquitetura de Computadores Tipos de Instruções Tipos de instruções Instruções de movimento de dados Operações diádicas Operações monádicas Instruções de comparação e desvio condicional Instruções de chamada
Arquitetura de Computadores Tipos de Instruções Tipos de instruções Instruções de movimento de dados Operações diádicas Operações monádicas Instruções de comparação e desvio condicional Instruções de chamada
www.rogercom.com - Manual da placa R-CONTROL 30
 5 6 LEDs piloto: acende quando um dos Relês: RL1, RL2, RL3 ou RL4 for ativado. 4 3 7 18 8 15 16 17 14 9 2 10 1 11 LEDs indicadores de transmissão/recepção USB entre a placa e o PC. 13 12 LED indicador
5 6 LEDs piloto: acende quando um dos Relês: RL1, RL2, RL3 ou RL4 for ativado. 4 3 7 18 8 15 16 17 14 9 2 10 1 11 LEDs indicadores de transmissão/recepção USB entre a placa e o PC. 13 12 LED indicador
TEM VÁRIOS ESTADOS: 0V,0.1V,3V,3.3V,4V,5V,10V, ETC.
 CONVERSOR ANALÓGICO / DIGITAL SINAL DIGITAL ASSUME APENAS 2 ESTADOS: 0V E 5V SINAL ANALÓGICO TEM VÁRIOS ESTADOS: 0V,0.1V,3V,3.3V,4V,5V,10V, ETC. 1 FONTE DESTES SINAIS ANALÓGICOS UM DOS NOSSOS OBJETIVOS
CONVERSOR ANALÓGICO / DIGITAL SINAL DIGITAL ASSUME APENAS 2 ESTADOS: 0V E 5V SINAL ANALÓGICO TEM VÁRIOS ESTADOS: 0V,0.1V,3V,3.3V,4V,5V,10V, ETC. 1 FONTE DESTES SINAIS ANALÓGICOS UM DOS NOSSOS OBJETIVOS
R O B Ó T I C A. Sensor Smart. Ultrassom. Versão Hardware: 1.0 Versão Firmware: 1.0 REVISÃO 1211.13. www.robouno.com.br
 R O B Ó T I C A Sensor Smart Ultrassom Versão Hardware: 1.0 Versão Firmware: 1.0 REVISÃO 1211.13 Sensor Smart Ultrassom 1. Introdução Os sensores de ultrassom ou ultrassônicos são sensores que detectam
R O B Ó T I C A Sensor Smart Ultrassom Versão Hardware: 1.0 Versão Firmware: 1.0 REVISÃO 1211.13 Sensor Smart Ultrassom 1. Introdução Os sensores de ultrassom ou ultrassônicos são sensores que detectam
Linguagem de Programação JAVA. Técnico em Informática Professora Michelle Nery
 Linguagem de Programação JAVA Técnico em Informática Professora Michelle Nery Agenda Regras paravariáveis Identificadores Válidos Convenção de Nomenclatura Palavras-chaves em Java Tipos de Variáveis em
Linguagem de Programação JAVA Técnico em Informática Professora Michelle Nery Agenda Regras paravariáveis Identificadores Válidos Convenção de Nomenclatura Palavras-chaves em Java Tipos de Variáveis em
Módulo de Desenvolvimento PIC16F877A
 Objetivos: Módulo de Desenvolvimento PIC16F877A Realizar programação e projetos com microcontroladores e seus periféricos, integrando sistemas analógicos e digitais com a utilização de compilador (Mikro
Objetivos: Módulo de Desenvolvimento PIC16F877A Realizar programação e projetos com microcontroladores e seus periféricos, integrando sistemas analógicos e digitais com a utilização de compilador (Mikro
Programa de Unidade Curricular
 Programa de Unidade Curricular Faculdade Engenharia Licenciatura Engenharia Electrónica e Informática Unidade Curricular Arquitectura de Computadores Semestre: 4 Nº ECTS: 6,0 Regente Prof. Vítor Pereira
Programa de Unidade Curricular Faculdade Engenharia Licenciatura Engenharia Electrónica e Informática Unidade Curricular Arquitectura de Computadores Semestre: 4 Nº ECTS: 6,0 Regente Prof. Vítor Pereira
Introdução. Hardware (Parte I) Universidade Federal de Campina Grande Departamento de Sistemas e Computação. joseana@computacao.ufcg.edu.
 Universidade Federal de Campina Grande Departamento de Sistemas e Computação. joseana@computacao.ufcg.edu.") Universidade Federal de Campina Grande Departamento de Sistemas e Computação Introdução à Computação Hardware (Parte I) Prof. a Joseana Macêdo Fechine Régis de Araújo joseana@computacao.ufcg.edu.br Carga
Universidade Federal de Campina Grande Departamento de Sistemas e Computação Introdução à Computação Hardware (Parte I) Prof. a Joseana Macêdo Fechine Régis de Araújo joseana@computacao.ufcg.edu.br Carga
WWW.cerne-tec.com.br. Comunicação USB com o PIC Vitor Amadeu Souza Parte II vitor@cerne-tec.com.br
 1 Comunicação USB com o PIC Vitor Amadeu Souza Parte II vitor@cerne-tec.com.br Continuando com o artigo apresentado na edição passada de comunicação USB com o PIC, continuaremos nesta edição o estudo do
1 Comunicação USB com o PIC Vitor Amadeu Souza Parte II vitor@cerne-tec.com.br Continuando com o artigo apresentado na edição passada de comunicação USB com o PIC, continuaremos nesta edição o estudo do
CONSTRUÇÃO DE UMA UCP HIPOTÉTICA M++ INTRODUÇÃO
 CONSTRUÇÃO DE UMA UCP HIPOTÉTICA M++ INTRODUÇÃO O seguinte artigo apresenta uma UCP hipotética construída no software simulador DEMOWARE Digital Works 3.04.39. A UCP (Unidade Central de Processamento)
CONSTRUÇÃO DE UMA UCP HIPOTÉTICA M++ INTRODUÇÃO O seguinte artigo apresenta uma UCP hipotética construída no software simulador DEMOWARE Digital Works 3.04.39. A UCP (Unidade Central de Processamento)
PROGRAMAÇÃO DE UM MICROPROCESSADOR
 Relatório de Microprocessadores 2007/2008 Engenharia Física Tecnológica PROGRAMAÇÃO DE UM MICROPROCESSADOR EM C E ASSEMBLY PARA CONTROLO DE UM LED Laboratório I Trabalho realizado por: André Cunha, nº53757
Relatório de Microprocessadores 2007/2008 Engenharia Física Tecnológica PROGRAMAÇÃO DE UM MICROPROCESSADOR EM C E ASSEMBLY PARA CONTROLO DE UM LED Laboratório I Trabalho realizado por: André Cunha, nº53757
Roteiro. MC-102 Aula 01. Hardware e dispositivos. O que é um computador? Primeiro Semestre de 2008 3 A linguagem C
 Roteiro Introdução à Programação de Computadores 1 Instituto de Computação Unicamp 2 Primeiro Semestre de 2008 3 O que é um computador? Computador: o que computa, calculador, calculista. (dicionário Houaiss).
Roteiro Introdução à Programação de Computadores 1 Instituto de Computação Unicamp 2 Primeiro Semestre de 2008 3 O que é um computador? Computador: o que computa, calculador, calculista. (dicionário Houaiss).
INTRODUÇÃO À LINGUAGEM C++
 INTRODUÇÃO À LINGUAGEM C++ 1 - VARIÁVEIS Variáveis espaço de memória reservado para armazenar tipos de dados, com um nome para referenciar seu conteúdo. Observações importantes Todas as variáveis devem
INTRODUÇÃO À LINGUAGEM C++ 1 - VARIÁVEIS Variáveis espaço de memória reservado para armazenar tipos de dados, com um nome para referenciar seu conteúdo. Observações importantes Todas as variáveis devem
11- Tornar transparente para o processador os detalhes de operação e controle dos dispositivos periféricos.
 1- O componente principal e chamado de célula de bit. 2- A célula de bit é um circuito eletrônico que armazena um bit de informação. 3- O menor conjunto de células de bits que é acessado pelo processador
1- O componente principal e chamado de célula de bit. 2- A célula de bit é um circuito eletrônico que armazena um bit de informação. 3- O menor conjunto de células de bits que é acessado pelo processador
PROTÓTIPO DE UM COMPUTADOR DE BORDO PARA AUTOMÓVEIS BASEADO NA ARQUITETURA ARM. Rafael de Souza Prof. Miguel Wisintainer - Orientador
 PROTÓTIPO DE UM COMPUTADOR DE BORDO PARA AUTOMÓVEIS BASEADO NA ARQUITETURA ARM Rafael de Souza Prof. Miguel Wisintainer - Orientador Roteiro da Apresentação Introdução Objetivos do trabalho Microcontrolador
PROTÓTIPO DE UM COMPUTADOR DE BORDO PARA AUTOMÓVEIS BASEADO NA ARQUITETURA ARM Rafael de Souza Prof. Miguel Wisintainer - Orientador Roteiro da Apresentação Introdução Objetivos do trabalho Microcontrolador
Guia do Usuário Placa de Desenvolvimento McLab1
 Placa de Desenvolvimento McLab1 Sumário 1. APRESENTAÇÃO...3 2. HARDWARE...4 2.1. MICROCONTROLADOR PIC16F628A...4 2.2. DISPLAYS DE 7 SEGMENTOS...5 2.3. TECLAS...5 2.4. LEDS...6 2.5. LÂMPADA...6 2.6. BOTÃO
Placa de Desenvolvimento McLab1 Sumário 1. APRESENTAÇÃO...3 2. HARDWARE...4 2.1. MICROCONTROLADOR PIC16F628A...4 2.2. DISPLAYS DE 7 SEGMENTOS...5 2.3. TECLAS...5 2.4. LEDS...6 2.5. LÂMPADA...6 2.6. BOTÃO
Organização de Computadores Prof. Alex Vidigal Bastos
 Organização de Computadores Prof. Alex Vidigal Bastos Armazenar dados e programas que serão utilizados pelo processador (CPU unidade central de processamento) O subsistema de memória é constituído de
Organização de Computadores Prof. Alex Vidigal Bastos Armazenar dados e programas que serão utilizados pelo processador (CPU unidade central de processamento) O subsistema de memória é constituído de
C:\Users\House\Desktop\fluxo.c 1: /****************************************************************************** 2: * Objetivo: Este projeto visa
 1: /****************************************************************************** 2: * Objetivo: Este projeto visa monitorar uma tensão de um sensor e mostrar * 3: * e após a conversão necessária da escala
1: /****************************************************************************** 2: * Objetivo: Este projeto visa monitorar uma tensão de um sensor e mostrar * 3: * e após a conversão necessária da escala
O processador é um dos elementos componentes do computador moderno, sendo responsável pelo gerenciamento de todo o computador.
 Resumo 01 O que é um processador? O processador é um dos elementos componentes do computador moderno, sendo responsável pelo gerenciamento de todo o computador. Os processadores atualmente são encapsulados
Resumo 01 O que é um processador? O processador é um dos elementos componentes do computador moderno, sendo responsável pelo gerenciamento de todo o computador. Os processadores atualmente são encapsulados
Descobrindo o dspic da Microchip Vitor Amadeu Souza Vitor@cerne-tec.com.br
 Descobrindo o dspc da Microchip Vitor Amadeu Souza Vitor@cernetec.com.br A Microchip lançou recentemente uma nova família de microcontroladores chamada de dspc. Esta linha vem para atender um mercado onde
Descobrindo o dspc da Microchip Vitor Amadeu Souza Vitor@cernetec.com.br A Microchip lançou recentemente uma nova família de microcontroladores chamada de dspc. Esta linha vem para atender um mercado onde
ARQUITETURA DE COMPUTADORES
 1 ARQUITETURA DE COMPUTADORES U C P Prof. Leandro Coelho Plano de Aula 2 Aula Passada Definição Evolução dos Computadores Histórico Modelo de Von-Neumann Básico CPU Mémoria E/S Barramentos Plano de Aula
1 ARQUITETURA DE COMPUTADORES U C P Prof. Leandro Coelho Plano de Aula 2 Aula Passada Definição Evolução dos Computadores Histórico Modelo de Von-Neumann Básico CPU Mémoria E/S Barramentos Plano de Aula
ACENDENDO AS LUZES. Capitulo 2 - Aula 1 Livro: Arduino básico Tutor: Wivissom Fayvre
 ACENDENDO AS LUZES Capitulo 2 - Aula 1 Livro: Arduino básico Tutor: Wivissom Fayvre Projeto 1 LED piscante Neste capitulo, todos os projetos utilizam luzes LED s de diversas formas. Em relação ao hardware,
ACENDENDO AS LUZES Capitulo 2 - Aula 1 Livro: Arduino básico Tutor: Wivissom Fayvre Projeto 1 LED piscante Neste capitulo, todos os projetos utilizam luzes LED s de diversas formas. Em relação ao hardware,
Robótica com Arduino. Resistores. Professor: Paulo Trentin
 Robótica com Arduino Resistores Professor: Paulo Trentin O que é? Componente que resiste a passagem de certa corrente no circuito. "o valor da resistência elétrica é obtido mediante a formação de um sulco
Robótica com Arduino Resistores Professor: Paulo Trentin O que é? Componente que resiste a passagem de certa corrente no circuito. "o valor da resistência elétrica é obtido mediante a formação de um sulco
Tipo de Dados em Linguagem C
 Tipo de Dados em Linguagem C Principais tipos de dados em C int : tipo de dados inteiros (exemplo: 1, -3, 100, -9, 18, etc.) float : tipo de dados reais (exemplo: 1.33, 3.14, 2.00, -9.0, 1.8, etc.) Ocupa
Tipo de Dados em Linguagem C Principais tipos de dados em C int : tipo de dados inteiros (exemplo: 1, -3, 100, -9, 18, etc.) float : tipo de dados reais (exemplo: 1.33, 3.14, 2.00, -9.0, 1.8, etc.) Ocupa
Introdução à programação de microcontroladores www.pictronics.com.br PIC. Introdução à programação de microcontroladores www.pictronics.com.
 Introdução à programação de microcontroladores www.pictronics.com.br PIC Introdução à programação de microcontroladores www.pictronics.com.br Nelson Camilo de Almeida Jan/2011 Conteúdo 1- Introdução PIC
Introdução à programação de microcontroladores www.pictronics.com.br PIC Introdução à programação de microcontroladores www.pictronics.com.br Nelson Camilo de Almeida Jan/2011 Conteúdo 1- Introdução PIC
Paralelismo a Nível de Instrução
 Paralelismo a Nível de Instrução É possível obter maior desempenho computacional com: tecnologias mais avançadas, tais como circuitos mais rápidos; melhor organização da CPU, tais como o uso de múltiplos
Paralelismo a Nível de Instrução É possível obter maior desempenho computacional com: tecnologias mais avançadas, tais como circuitos mais rápidos; melhor organização da CPU, tais como o uso de múltiplos
Algoritmos e Programação Aula 01 Introdução a Computação
 Algoritmos e Programação Aula 01 Introdução a Computação Felipe S. L. G. Duarte Felipelageduarte+fatece@gmail.com Baseado no material do Prof. Luis Otavio Alvares e do Prof. Dr. Rodrigo Fernandes de Mello
Algoritmos e Programação Aula 01 Introdução a Computação Felipe S. L. G. Duarte Felipelageduarte+fatece@gmail.com Baseado no material do Prof. Luis Otavio Alvares e do Prof. Dr. Rodrigo Fernandes de Mello
Curso microcontroladores PIC
 Curso microcontroladores PIC Jean Carlos www.pk2lab.blogspot.com Curso de microcontroladores em linguagem C 2 Baseado no microcontrolador PIC18F4550 da Microchip, compilador MikroC e placa de desenvolvimento
Curso microcontroladores PIC Jean Carlos www.pk2lab.blogspot.com Curso de microcontroladores em linguagem C 2 Baseado no microcontrolador PIC18F4550 da Microchip, compilador MikroC e placa de desenvolvimento
Computador Cleópatra
 ORGNIZÇÃO E RQUITETUR DE COMPUTDORES Computador Cleópatra Introdução a rquitetura e Programação lexandre mory Edson Moreno 2 / 9 Na ula nterior bstração em Software Programa em linguagem C Programa em
ORGNIZÇÃO E RQUITETUR DE COMPUTDORES Computador Cleópatra Introdução a rquitetura e Programação lexandre mory Edson Moreno 2 / 9 Na ula nterior bstração em Software Programa em linguagem C Programa em
Programação de Computadores. Turma CI-180-B. Josiney de Souza. josineys@inf.ufpr.br
 Programação de Computadores Turma CI-180-B Josiney de Souza josineys@inf.ufpr.br Agenda do Dia Aula 2 (06/03/15) Como está organizado um computador Computadores antigos Modelo von-neumann Quais suas partes
Programação de Computadores Turma CI-180-B Josiney de Souza josineys@inf.ufpr.br Agenda do Dia Aula 2 (06/03/15) Como está organizado um computador Computadores antigos Modelo von-neumann Quais suas partes
10/02/2015. Introdução. Podemos classificar os tipos de dados a serem processados em dados e instruções Dados: Algoritmos e Lógica de Programação
 Introdução Algoritmos e Lógica de Programação Tipos de dados Podemos classificar os tipos de dados a serem processados em dados e instruções Dados: Informações a serem processadas pelo computador. Consideremos
Introdução Algoritmos e Lógica de Programação Tipos de dados Podemos classificar os tipos de dados a serem processados em dados e instruções Dados: Informações a serem processadas pelo computador. Consideremos
Aula 19. Conversão AD e DA Técnicas
 Aula 19 Conversão AD e DA Técnicas Introdução As características mais importantes dos conversores AD e DA são o tempo de conversão, a taxa de conversão, que indicam quantas vezes o sinal analógico ou digital
Aula 19 Conversão AD e DA Técnicas Introdução As características mais importantes dos conversores AD e DA são o tempo de conversão, a taxa de conversão, que indicam quantas vezes o sinal analógico ou digital
Introdução. Em se tratando de computador, entendemos que memória são dispositivos que armazenam dados com os quais o processador trabalha.
 Memorias Introdução Em se tratando de computador, entendemos que memória são dispositivos que armazenam dados com os quais o processador trabalha. Necessariamente existe dois tipos de memórias: -Memória
Memorias Introdução Em se tratando de computador, entendemos que memória são dispositivos que armazenam dados com os quais o processador trabalha. Necessariamente existe dois tipos de memórias: -Memória
Na figura abaixo é mostra os pinos do microcontrolador utilizado no montagem da placa, o PIC16F628A.
 Escrito por Wandery Ap Ramos CLP PIC Wantronics Hoje em dia nas industrias em geral se utilizam muitos inversores de frequência, CLPs, controladores de velocidade, temporizadores, controladores de temperatura,
Escrito por Wandery Ap Ramos CLP PIC Wantronics Hoje em dia nas industrias em geral se utilizam muitos inversores de frequência, CLPs, controladores de velocidade, temporizadores, controladores de temperatura,
C Joice Barbosa Magalhães Revisão da placa e dados do 19/04/2010 manual D Cássio Almeida da Gama Adequação à nova codificação 05/01/2012
 .. Kit de desenvolvimento XM111 Revisão Principais Autores Descrição da Versão Término A José Domingos Adriano Versão inicial 08/02/2006 Amin Yossef Helou B Marcelo M. Maia do Couto Atualização dos descritivos;
.. Kit de desenvolvimento XM111 Revisão Principais Autores Descrição da Versão Término A José Domingos Adriano Versão inicial 08/02/2006 Amin Yossef Helou B Marcelo M. Maia do Couto Atualização dos descritivos;
UNIPAC UNIVERSIDADE PRESIDENTE ANTÔNIO CARLOS FACULDADE DE CIÊNCIA DA COMPUTAÇÃO E COMUNICAÇÃO SOCIAL CURSO DE CIÊNCIA DA COMPUTAÇÃO
 UNIPAC UNIVERSIDADE PRESIDENTE ANTÔNIO CARLOS FACULDADE DE CIÊNCIA DA COMPUTAÇÃO E COMUNICAÇÃO SOCIAL CURSO DE CIÊNCIA DA COMPUTAÇÃO Pietro Diovane Keoma Bergamaschi de Assis MICROCONTROLADOR - 2-2 BARBACENA
UNIPAC UNIVERSIDADE PRESIDENTE ANTÔNIO CARLOS FACULDADE DE CIÊNCIA DA COMPUTAÇÃO E COMUNICAÇÃO SOCIAL CURSO DE CIÊNCIA DA COMPUTAÇÃO Pietro Diovane Keoma Bergamaschi de Assis MICROCONTROLADOR - 2-2 BARBACENA
Capítulo 4 Gerenciamento de Memória
 Capítulo 4 Gerenciamento de Memória 4.1 Gerenciamento básico de memória 4.2 Troca de processos 4.3 Memória virtual 4.4 Algoritmos de substituição de páginas 4.5 Modelagem de algoritmos de substituição
Capítulo 4 Gerenciamento de Memória 4.1 Gerenciamento básico de memória 4.2 Troca de processos 4.3 Memória virtual 4.4 Algoritmos de substituição de páginas 4.5 Modelagem de algoritmos de substituição
MEDIDOR DE VELOCIDADE UTILIZANDO FOTOTRANSISTOR
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UFRN CENTRO DE TECNOLOGIA CT DEPARTAMENTO DE ENGENHARIA ELÉTRICA DEE ELE0622 Instrumentação Eletrônica Docente: Luciano Fontes ANDERSON SAUNDERS BRIGIDO FERNANDES
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UFRN CENTRO DE TECNOLOGIA CT DEPARTAMENTO DE ENGENHARIA ELÉTRICA DEE ELE0622 Instrumentação Eletrônica Docente: Luciano Fontes ANDERSON SAUNDERS BRIGIDO FERNANDES
Programação em BASIC para o PIC Projetos com Display Gráfico Vitor Amadeu Souza
 Programação em BASIC para o PIC Projetos com Display Gráfico Vitor Amadeu Souza Introdução No artigo desta edição, veremos os passos para controlar um dispaly gráfico de 128 x 64 pixels. A idéia será apresentar
Programação em BASIC para o PIC Projetos com Display Gráfico Vitor Amadeu Souza Introdução No artigo desta edição, veremos os passos para controlar um dispaly gráfico de 128 x 64 pixels. A idéia será apresentar
CE N T R AI S TELEFÔNICAS HDL
 Assistência Técnica HDL CE N T R AI S TELEFÔNICAS HDL Diagr ama de Sinais HDL Processamento e Controle Microcontrolador 80C251: Placa CPU HDL 80P / HDL 368P / HDL 4-12 Microcontrolador 80C32: Placa de
Assistência Técnica HDL CE N T R AI S TELEFÔNICAS HDL Diagr ama de Sinais HDL Processamento e Controle Microcontrolador 80C251: Placa CPU HDL 80P / HDL 368P / HDL 4-12 Microcontrolador 80C32: Placa de
MEC1100 Manual de Instruções v2010.10
 MEC1100 Manual de Instruções v2010.10 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br 1
MEC1100 Manual de Instruções v2010.10 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br 1
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação VELOHIDRO CURITIBA
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação VELOHIDRO CURITIBA 2011 1 Fernando Brambilla de Mello Silvio da Costa Reis Victor Miranda
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação VELOHIDRO CURITIBA 2011 1 Fernando Brambilla de Mello Silvio da Costa Reis Victor Miranda
CCNA 2 Conceitos Básicos de Roteadores e Roteamento
 CCNA 2 Conceitos Básicos de Roteadores e Roteamento Capítulo 2 - Introdução aos Roteadores 1 Objetivos do Capítulo Descrever a finalidade e operação básica do IOS; Identificar vários recursos do IOS; Identificar
CCNA 2 Conceitos Básicos de Roteadores e Roteamento Capítulo 2 - Introdução aos Roteadores 1 Objetivos do Capítulo Descrever a finalidade e operação básica do IOS; Identificar vários recursos do IOS; Identificar
INFORMATIVO DE PRODUTO
 Unidade Discadora Telefônica - Para Monitoramento Remoto Até 5 Números Código: AFDISC A unidade discadora telefônica para monitoramento remoto, código AFDISC é um equipamento que deve ser instalado em
Unidade Discadora Telefônica - Para Monitoramento Remoto Até 5 Números Código: AFDISC A unidade discadora telefônica para monitoramento remoto, código AFDISC é um equipamento que deve ser instalado em
Técnico/a de Refrigeração e Climatização
 Técnico/a de Refrigeração e Climatização 1315 Eletricidade e eletrónica - programação de autómatos 2013/ 2014 Gamboa 1 Introdução Automação, estudo dos métodos e procedimentos que permitem a substituição
Técnico/a de Refrigeração e Climatização 1315 Eletricidade e eletrónica - programação de autómatos 2013/ 2014 Gamboa 1 Introdução Automação, estudo dos métodos e procedimentos que permitem a substituição
Cerne Tecnologia e Treinamento (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec") Tecnologia e Treinamento Tutorial para Testes na Placa Cerne Zig Bee (21) 4063-9798 (11) 4063-1877 E-mail: MSN: cerne-tec@hotmail.com Skipe: cerne-tec Kits Didáticos e Gravadores da Cerne Tecnologia A
Tecnologia e Treinamento Tutorial para Testes na Placa Cerne Zig Bee (21) 4063-9798 (11) 4063-1877 E-mail: MSN: cerne-tec@hotmail.com Skipe: cerne-tec Kits Didáticos e Gravadores da Cerne Tecnologia A
Compatível com o módulo AIO571 Nota: Os conectores de interface dos módulos podem ser do tipo alavanca (para os módulos novos) ou do tipo parafuso.
 ou do tipo parafuso.") Automação Industrial Módulos Controlador P7C - HI Tecnologia 7C 573 57 3 O conteúdo deste documento é parte do Manual do Usuário do controlador P7C da HI tecnologia (PMU10700100). A lista de verbetes consta
Automação Industrial Módulos Controlador P7C - HI Tecnologia 7C 573 57 3 O conteúdo deste documento é parte do Manual do Usuário do controlador P7C da HI tecnologia (PMU10700100). A lista de verbetes consta
BEC- Bafômetro Embutido em Carros
 BEC- Bafômetro Embutido em Carros Síntia Rodrigues Moreira Fernanda Rodrigues da Silva Márcia Jorge do Carmo Renata Cristina Guimarães Sofia Pereira Campos Agosto de 2014 1 1 Introdução O consumo de álcool
BEC- Bafômetro Embutido em Carros Síntia Rodrigues Moreira Fernanda Rodrigues da Silva Márcia Jorge do Carmo Renata Cristina Guimarães Sofia Pereira Campos Agosto de 2014 1 1 Introdução O consumo de álcool
TUTORIAL APOSTILA PL7
 TUTORIAL APOSTILA PL7 CLP TELEMECANIQUE TSX 3722 SV.:3.0 AUTOR: MAYCON MAX KOPELVSKI MMK rev.01 TUTORIAL PL7 - CLP TELEMECANIQUE TSX3722 SV.:3.0 Pagina 1 de 12 TELA DETALHE OBSERVAÇÃO ETAPA 01 Iniciar
TUTORIAL APOSTILA PL7 CLP TELEMECANIQUE TSX 3722 SV.:3.0 AUTOR: MAYCON MAX KOPELVSKI MMK rev.01 TUTORIAL PL7 - CLP TELEMECANIQUE TSX3722 SV.:3.0 Pagina 1 de 12 TELA DETALHE OBSERVAÇÃO ETAPA 01 Iniciar
Pontifícia Universidade Católica do Paraná - PUCPR. Centro de Ciências Exatas e Tecnologia - CCET. Engenharia de Computação
 Pontifícia Universidade Católica do Paraná - PUCPR Centro de Ciências Exatas e Tecnologia - CCET Engenharia de Computação Jean Carlo Ferreira Tambosi Raul Silva Donato Victor Henrique Alves Ribeiro Gerador
Pontifícia Universidade Católica do Paraná - PUCPR Centro de Ciências Exatas e Tecnologia - CCET Engenharia de Computação Jean Carlo Ferreira Tambosi Raul Silva Donato Victor Henrique Alves Ribeiro Gerador
DISPOSITIVOS DE BLOCO. Professor: João Paulo de Brito Gonçalves
 DISPOSITIVOS DE BLOCO Professor: João Paulo de Brito Gonçalves INTRODUÇÃO Periférico Dispositivo conectado a um computador de forma a possibilitar sua interação com o mundo externo. Conectados ao computador
DISPOSITIVOS DE BLOCO Professor: João Paulo de Brito Gonçalves INTRODUÇÃO Periférico Dispositivo conectado a um computador de forma a possibilitar sua interação com o mundo externo. Conectados ao computador
Introdução à Arquitetura de Computadores
 Introdução à Arquitetura de Computadores Prof. Tiago Semprebom Instituto Federal de Educação, Ciência e Tecnologia Santa Catarina - Campus São José tisemp@sj.ifsc.edu.br 31 de julho de 2009 Prof. Tiago
Introdução à Arquitetura de Computadores Prof. Tiago Semprebom Instituto Federal de Educação, Ciência e Tecnologia Santa Catarina - Campus São José tisemp@sj.ifsc.edu.br 31 de julho de 2009 Prof. Tiago
Hardware Parte I. Fábio Rodrigues de la Rocha
 Hardware Parte I Fábio Rodrigues de la Rocha PIC16F877 40 pinos Freqüência máxima 20MHz. Vias de programação 14 bits 33 portas configuráveis como entradas/saídas 15 interrupções diferentes Memória EEPROM
Hardware Parte I Fábio Rodrigues de la Rocha PIC16F877 40 pinos Freqüência máxima 20MHz. Vias de programação 14 bits 33 portas configuráveis como entradas/saídas 15 interrupções diferentes Memória EEPROM
TECNOLOGIAS DA INFORMAÇÃO E COMUNICAÇÃO
 TECNOLOGIAS DA INFORMAÇÃO E COMUNICAÇÃO O que é a Informática? A palavra Informática tem origem na junção das palavras: INFORMAÇÃO + AUTOMÁTICA = INFORMÁTICA...e significa, portanto, o tratamento da informação
TECNOLOGIAS DA INFORMAÇÃO E COMUNICAÇÃO O que é a Informática? A palavra Informática tem origem na junção das palavras: INFORMAÇÃO + AUTOMÁTICA = INFORMÁTICA...e significa, portanto, o tratamento da informação