Microprocessadores Tópicos Esp. em Eletrônica Industrial
|
|
|
- Luciana Andrade Vilanova
- 5 Há anos
- Visualizações:
Transcrição

1 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos Esp. em Eletrônica Industrial - amauriassef@utfpr.edu.br paginapessoal.utfpr.edu.br/amauriassef 1
2 Tiva C TM4C123GH6PM Módulo PWM (Pulse Width Modulation Modulação por Largura de Pulso) - pag A modulação da largura do pulso (PWM) é uma técnica poderosa para a codificação digital dos níveis de sinal analógico Os contadores de alta resolução são usados para gerar uma onda quadrada, e o ciclo de funcionamento da onda quadrada é modulado para codificar um sinal analógico. As aplicações típicas incluem trocas de alimentação e controle do motor. 2
 Realimentação Vo")


3 PWM digital Referencia Vo (desejada) Realimentação Vo (medida) Amplificador de erro + Amplificador - + Amplificador - Modulador Saída do controlador Forma de onda Triangular/Dente de serra 3
4 O TM4C123GH6PM contém 2 módulos PWM: Cada módulo com 4 blocos geradores PWM e um bloco de controle, para um total de 16 saídas PWM (3 blocos para um sistema trifásico) O bloco de controle determina a polaridade dos sinais PWM, e quais sinais são transmitidos para os pinos. Bloco 0 com geradores 0 a 3 Bloco 1 com geradores 0 a 3 Cada bloco gerador PWM produz dois sinais PWM que compartilham o mesmo temporizador e frequência e podem ser programados com ações independentes ou como um único par de sinais complementares com atrasos de tempo morto inseridos. Os sinais de saída, pwma e pwmb', dos blocos de geração PWM são gerenciados pelo bloco de controle de saída antes de serem passados para os pinos do dispositivo como MnPWM0 e MnPWM1 ou MnPWM2 e MnPWM3 e assim por diante. 4
5 Características Uma condição de falha (fault) de manuseio de entradas para fornecer rápido desligamento de baixa latência e evitar danos ao motor a ser controlado, para um total de duas entradas Um contador de 16 bits (máximo 65535) Funciona no modo decrescente ou crescente/decrescente Frequência de saída controlada por um valor de carga de 16 bits As atualizações do valor da carga podem ser sincronizadas Produz sinais de saída em zero e valor de carga O PWM tem duas opções de fonte de relógio: Clock do sistema Clock de sistema pré-dividido Dois comparadores PWM As atualizações do valor do comparador podem ser sincronizadas Produz sinais de saída na correspondência dos valores 5
6 Gerador de sinal PWM O sinal PWM de saída é construído com base em ações tomadas como resultado do contador e dos sinais de saída do comparador PWM Produz dois sinais PWM independentes Gerador de tempo morto Produz dois sinais PWM com atrasos programáveis de tempo morto adequados para controle de uma ponte-h Pode ser ignorado, deixando os sinais PWM de entrada não modificados Pode iniciar uma sequência de amostras do ADC Possui um bloco de controle que determina a polaridade dos sinais PWM e quais os sinais são passados para os pinos 6
7 O bloco de controle PWM possui as seguintes opções: Ativação de saída PWM de cada sinal PWM Inversão de saída opcional de cada sinal PWM (controle de polaridade) Manipulação de falhas (faults) opcional para cada sinal de PWM Sincronização de temporizadores nos blocos geradores PWM Sincronização de atualizações de temporizador / comparador em todos os blocos do gerador PWM Sincronização PWM estendida de atualizações de temporizador / comparador em todos os blocos do gerador PWM Sumário do estado de interrupção dos blocos do gerador PWM Gerenciamento de falhas PWM ampliado, com múltiplos sinais de falha, polaridades programáveis e filtragem Os geradores PWM podem ser operados independentemente ou sincronizados com outros geradores 7
8 Diagrama em blocos do módulo PWM Sinais complementares PWM 0 8
9 Diagrama em blocos do módulo gerador PWM 9
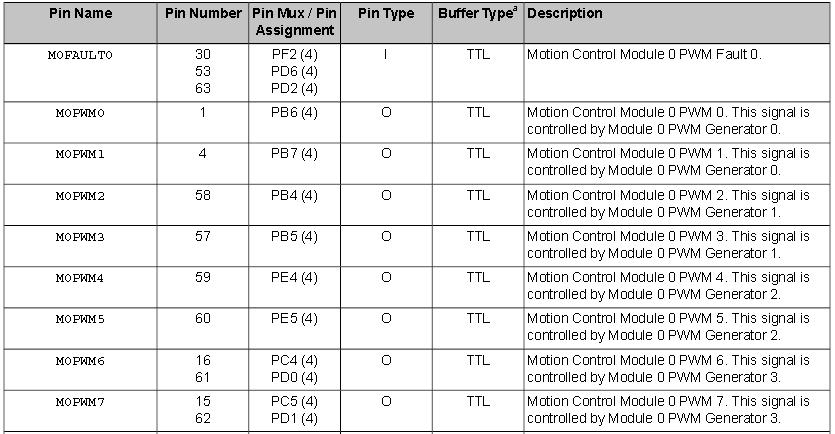
10 Pinos 10

11 Comparadores LOAD é o valor no registro PWMnLOAD COMPA é o valor no registro PWMnCMPA COMPB é o valor no registro PWMnCMPB load é o sinal interno que possui um pulso alto de largura de ciclo único do clock, quando o contador == ao valor da carga zero é o sinal interno que tem um pulso alto de largura do ciclo único do relógio quando o contador é zero cmpa é o sinal interno que possui um pulso alto de largura do ciclo único do clock, quando o contador é igual a COMPA cmpb é o sinal interno que possui um pulso alto de largura do ciclo único do clock, quando o contador é igual a COMPB dir é o sinal interno que indica a direção de contagem 11
12 Modo PWM decrescente Modo PWM crescente-descrescente 12
13 Gerador de tempo morto Os sinais pwma e pwmb produzidos por cada gerador PWM são passados para o gerador de tempo morto Se o gerador da banda morta estiver desativado, os sinais PWM simplesmente passam para os sinais pwma 'e pwmb' não modificados. Com o gerador habilitado, o sinal pwmb é perdido e dois sinais PWM são gerados com base no sinal pwma. O primeiro sinal PWM de saída, pwma, é o sinal pwma com borda de subida atrasada por um valor programável. O segundo sinal PWM de saída, pwmb ', é a inversão do sinal pwma com um atraso programável adicionado entre a borda de descida do sinal pwma e a margem ascendente do sinal pwmb '. 13

14 Condições de falha (fault) Uma condição de falha é aquela em que o controlador deve ser sinalizado para parar a função PWM normal e, em seguida, configure os sinais MnPWMn para um estado seguro. Duas situações básicas causam condições de falha: O microcontrolador está paralisado e não pode realizar a computação necessária no tempo necessário para o controle de movimento Um erro ou evento externo é detectado Cada gerador PWM pode usar as seguintes entradas para gerar uma condição de falha: Pino MnFAULTn Uma parada do controlador gerada pelo depurador O gatilho de um comparador digital ADC 14
15 Bloco de controle de saída O bloco de controle de saída cuida do condicionamento final dos sinais pwma 'e pwmb' antes de ir para os pinos como os sinais MnPWMn. Através de um único registro, o registro PWM Output Enable (PWNENABLE), o conjunto de sinais PWM efetivamente habilitados para os pinos podem ser modificados. Esta função pode ser usada, por exemplo, para executar a comutação de um motor CC sem escova com uma única gravação de registro (e sem modificar os geradores PWM individuais, que são modificados pelo loop de controle de feedback). Além disso, a atualização dos bits no registro PWMENABLE pode ser configurada para ser imediata ou localmente ou globalmente sincronizada para a próxima atualização síncrona usando o registro PWM Enable Update (PWMENUPD). 15
16 Métodos de sincronização Cada módulo PWM fornece quatro geradores PWM, cada um fornecendo duas saídas PWM que podem ser usadas em uma grande variedade de aplicações. De um modo geral, o PWM é usado em uma das duas categorias de operação: Não-sincronizado: O gerador PWM e seus dois sinais de saída são usados sozinhos, independentemente de outros geradores PWM Sincronizado: O gerador PWM e seus dois sinais de saídas são usados em conjunto com outros geradores PWM usando uma base de tempo comum e unificada. Se vários geradores PWM estiverem configurados com o mesmo valor de carga contador, a sincronização pode ser usada para garantir que eles também tenham o mesmo valor de contagem (os geradores PWM devem ser configurados antes de serem sincronizados). Com esta característica, mais de dois sinais MnPWMn podem ser produzidos com uma relação conhecida entre as bordas desses sinais porque os contadores sempre têm o mesmo valores. 16
17 Inicialização e configuração: O exemplo mostra como inicializar o PWM Generator 0 com uma frequência de 25 khz (clock do sistema de 20 MHz), duty cycle de 25% no pino MnPWM0 e duty cycle de 75% no pino MnPWM1. 1) Ative o relógio PWM escrevendo um valor de 0x para o registro RCGC0 no módulo de controle do sistema (p. 456). 2) Ative o relógio no módulo GPIO apropriado através do registro RCGC2 no módulo de Controle do Sistema (p. 464). 3) No módulo GPIO, habilite os pinos apropriados para sua função alternativa usando o registro GPIOAFSEL. Para determinar quais GPIOs devem ser configurados (p. 1344). 4) Configure os campos PMCn no registro GPIOPCTL para atribuir os sinais PWM aos pinos apropriados (consulte a p. 688). 5) Configure o registro de Configuração do Relógio de Modo de Corrida (RCC) no módulo de Controle do Sistema para usar a divisão PWM (USEPWMDIV) e o divisor (PWMDIV) para dividir por 2 (000). 17
18 6) Configure o gerador PWM para o modo de contagem regressiva com atualizações imediatas para os parâmetros. Escreva o registro PWM0CTL com um valor de 0x Escreva o registro PWM0GENA com um valor de 0x C. Escreva o registro PWM0GENB com um valor de 0x C. 7) Defina o período. Para uma frequência de 25 KHz, o período = 1 / 25,000 ou 40 µs. A fonte do relógio PWM é de 10 MHz; o relógio do sistema dividido por 2. Assim, existem 400 tiques do relógio por período Use este valor para configurar o registro PWM0LOAD. No modo contagem decrescente, defina o campo LOAD no registro PWM0LOAD no período solicitado menos um. Escreva o registro PWM0LOAD com um valor de 0x F =
19 8) Defina a largura de pulso do pino MnPWM0 para um ciclo de trabalho de 25% (na verdade 75% - cnt. decrescente). Escreva o registro PWM0CMPA com um valor de 0x B = 299 9) Defina a largura de pulso do pino MnPWM1 para um ciclo de trabalho de 75%. Escreva o registro PWM0CMPB com um valor de 0x = 99 10) Inicie os temporizadores no gerador PWM 0. Escreva o registro PWM0CTL com um valor de 0x ) Ativar saídas PWM. Escreva o registro PWMENABLE com um valor de 0x
20 APIs do TivaWare Projeto Timer Incluir o arquivo pwm.h #include "driverlib/pwm.h" //************************************************************************* / / API Function prototypes //************************************************************************* extern void PWMGenConfigure(uint32_t ui32base, uint32_t ui32gen, uint32_t ui32config); extern void PWMGenPeriodSet(uint32_t ui32base, uint32_t ui32gen, uint32_t ui32period); extern uint32_t PWMGenPeriodGet(uint32_t ui32base, uint32_t ui32gen); extern void PWMGenEnable(uint32_t ui32base, uint32_t ui32gen); extern void PWMGenDisable(uint32_t ui32base, uint32_t ui32gen); extern void PWMPulseWidthSet(uint32_t ui32base, uint32_t ui32pwmout, uint32_t ui32width); extern uint32_t PWMPulseWidthGet(uint32_t ui32base, uint32_t ui32pwmout); extern void PWMDeadBandEnable(uint32_t ui32base, uint32_t ui32gen, uint16_t ui16rise, uint16_t ui16fall); 20
21 Exemplo: Frequencia de PWM de 250 Hz e duty de 0,01% (clock de 50MHz/4) void Init_PWM (void){ SysCtlPWMClockSet(SYSCTL_PWMDIV_4); //50/4 = 12,5MHz SysCtlPeripheralEnable(SYSCTL_PERIPH_PWM1); SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOF); GPIOPinConfigure(GPIO_PF1_M1PWM5); GPIOPinTypePWM(GPIO_PORTF_BASE, GPIO_PIN_1); PWMGenConfigure(PWM1_BASE, PWM_GEN_2,PWM_GEN_MODE_DOWN PWM_GEN_MODE_NO_SYNC); PWMGenPeriodSet(PWM1_BASE, PWM_GEN_2, 50000); PWMPulseWidthSet(PWM1_BASE, PWM_OUT_5, 50); IntMasterEnable(); PWMIntEnable(PWM1_BASE, PWM_INT_GEN_2); PWMGenIntTrigEnable(PWM1_BASE, PWM_GEN_2, PWM_INT_CNT_LOAD); IntEnable(INT_PWM1_2); PWMOutputState(PWM1_BASE, PWM_OUT_5_BIT, true); PWMGenEnable(PWM1_BASE, PWM_GEN_2); } 21
22 Interrupção do PWM //***************************************************************************** // // The interrupt handler for the for PWM1 interrupts. // //***************************************************************************** void PWM1_GEN2_IntHandler(void) { // Clear the PWM0 LOAD interrupt flag. PWMGenIntClear(PWM1_BASE, PWM_GEN_2, PWM_INT_CNT_LOAD); // If the duty cycle is less or equal to 75% then add 0.1% to the duty // cycle. Else, reset the duty cycle to 0.1% cycles. Note that 50 is // 0.01% of the period (50000 cycles). } if((pwmpulsewidthget(pwm1_base, PWM_OUT_5) + 50) <= ((PWMGenPeriodGet(PWM1_BASE, PWM_GEN_2) * 3) / 4)) { PWMPulseWidthSet(PWM1_BASE, PWM_OUT_5, PWMPulseWidthGet(PWM1_BASE, PWM_OUT_5) + 50); } else { PWMPulseWidthSet(PWM1_BASE, PWM_OUT_5, 50); } 22
23 Referências Main page: Tiva C Series TM4C123G LaunchPad: TM4C123GH6PM folder: LaunchPad Wiki: Valvano, Jonathan. Embedded Systems (Introduction to Arm\xae Cortex\u2122-M Microcontrollers) (p. 260). Jonathan Valvano. E Microcontroladores ARM7 (Philips - Família LPC213x) : O poder dos 32 Bits - teoria e prática / Daniel Rodrigues de Sousa Microcontroladores ARMTM CortexTM-M3 (família LPC175x/6x da NXP) : Programação em linguagem C / Alberto Noboru Miyadaira Introdução aos microcontroladores ARM Cortex-M4 Tiva C Series da Texas Instruments, Stéfano Andrade de Souza, Março de
Microprocessadores Tópicos Esp. em Eletrônica Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
Microprocessadores Tópicos Esp. em Eletrônica Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
Microprocessadores Tópicos Esp. em Eletrônica Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
Microprocessadores Tópicos Esp. em Eletrônica Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
Microprocessadores Tópicos Esp. em Eletrônica Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ - UTFPR DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA - DAELT CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA - PPGSE Microprocessadores Tópicos
Aula 14. Contadores Assíncronos. SEL Sistemas Digitais. Prof. Dr. Marcelo Andrade da Costa Vieira
 Aula 4 Contadores Assíncronos SEL 044 - Sistemas Digitais Prof. Dr. Marcelo Andrade da Costa Vieira Assíncronos X Síncronos l Contadores Assíncronos: O CLK é colocado apenas no primeiro FF (LSB) l Contadores
Aula 4 Contadores Assíncronos SEL 044 - Sistemas Digitais Prof. Dr. Marcelo Andrade da Costa Vieira Assíncronos X Síncronos l Contadores Assíncronos: O CLK é colocado apenas no primeiro FF (LSB) l Contadores
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Temporizadores e Contadores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Temporizadores
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Temporizadores e Contadores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Temporizadores
Plano de Aula. 1 o semestre. Aula número 010 Interrupções Internas Timers. Uso de interrupções internas produzidas pelos timers
 Diretoria de Curso Plano de Aula 1 o semestre Nome do curso Eng. Ciências da Computação + TI + TADS + Eng. Elétrica Nome da Unidade Curricular Microprocessadores e Microcontroladores Aula número 010 Tema
Diretoria de Curso Plano de Aula 1 o semestre Nome do curso Eng. Ciências da Computação + TI + TADS + Eng. Elétrica Nome da Unidade Curricular Microprocessadores e Microcontroladores Aula número 010 Tema
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados - PIC16F877A
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados - PIC16F877A
Microcontroladores 2 EL08D Turma M12
 Microcontroladores 2 EL08D Turma M12 Prof. Gabriel Kovalhuk E-mail: kovalhuk@utfpr.edu.br Site: http://paginapessoal.utfpr.edu.br/kovalhuk TEMPORIZADORES / CONTADORES NO MSP430 Este material foi retirado
Microcontroladores 2 EL08D Turma M12 Prof. Gabriel Kovalhuk E-mail: kovalhuk@utfpr.edu.br Site: http://paginapessoal.utfpr.edu.br/kovalhuk TEMPORIZADORES / CONTADORES NO MSP430 Este material foi retirado
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
Jadsonlee da Silva Sá
 Introdução aos Sistemas Microcontrolados Jadsonlee da Silva Sá Jadsonlee.sa@univasf.edu.br www.univasf.edu.br/~jadsonlee.sa Introdução aos Sistemas Microcontrolados Assembly, C, java,... Circuito Reset
Introdução aos Sistemas Microcontrolados Jadsonlee da Silva Sá Jadsonlee.sa@univasf.edu.br www.univasf.edu.br/~jadsonlee.sa Introdução aos Sistemas Microcontrolados Assembly, C, java,... Circuito Reset
CONTROLE DE UM SERVO MOTOR
 CONTROLE DE UM SERVO MOTOR Versão 2015 RESUMO Esta experiência tem como objetivo a familiarização e o projeto de um circuito de controle simples de um servo motor. A parte experimental inclui atividades
CONTROLE DE UM SERVO MOTOR Versão 2015 RESUMO Esta experiência tem como objetivo a familiarização e o projeto de um circuito de controle simples de um servo motor. A parte experimental inclui atividades
Departamento de Engenharia Elétrica SEL 384 Laboratório de Sistemas Digitais I PRÁTICA Nº5B
 Departamento de Engenharia Elétrica SEL 384 Laboratório de Sistemas Digitais I PRÁTICA Nº5B CIRCUITOS SEQUENCIAIS Contadores síncronos e gerador de PWM 1. Introdução Nesta prática iremos compreender o
Departamento de Engenharia Elétrica SEL 384 Laboratório de Sistemas Digitais I PRÁTICA Nº5B CIRCUITOS SEQUENCIAIS Contadores síncronos e gerador de PWM 1. Introdução Nesta prática iremos compreender o
UTILIZAÇÃO DE MICROCONTROLADORES DE ALTA CAPACIDADE: Linha C2000 Texas Instruments
 UTILIZAÇÃO DE MICROCONTROLADORES DE ALTA CAPACIDADE: Linha C2000 Texas Instruments Milena Liege dos Santos Trindade 1 ; Regina Caon 2 ; Alécio Comelli 3 INTRODUÇÃO Com a evolução tecnológica a sociedade
UTILIZAÇÃO DE MICROCONTROLADORES DE ALTA CAPACIDADE: Linha C2000 Texas Instruments Milena Liege dos Santos Trindade 1 ; Regina Caon 2 ; Alécio Comelli 3 INTRODUÇÃO Com a evolução tecnológica a sociedade
Interrupções do Interrupções Gabriel Kovalhuk. UTFPR DAELN - Tecnologia em Mecatrônica Industrial
 Interrupções do 8051 Interrupções Interrupções do 8051 Evento aleatório à sequência normal do programa; Quando ocorre o evento, o programa é desviado para a função de atendimento da interrupção; O endereço
Interrupções do 8051 Interrupções Interrupções do 8051 Evento aleatório à sequência normal do programa; Quando ocorre o evento, o programa é desviado para a função de atendimento da interrupção; O endereço
CONTADORES DIGITAIS (Unidade 6)
") MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA BACHARELADO EM CIÊNCIA DA COMPUTAÇÃO DISCIPLINA: ELETRÔNICA
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA BACHARELADO EM CIÊNCIA DA COMPUTAÇÃO DISCIPLINA: ELETRÔNICA
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
ELETRÔNICA DIGITAL II. AUTOR: ENG. ANTONIO CARLOS LEMOS JÚNIOR
 ELETRÔNICA DIGITAL II AUTOR: ENG. ANTONIO CARLOS LEMOS JÚNIOR 52wz1h@bol.com.br UBERABA MG 2º SEMESTRE 2008 CONTEÚDO PROGRAMADO: 1 Flip-Flop J-K 2 Flip-Flop D 3 Latch D 4 Entradas assíncronas 5 Características
ELETRÔNICA DIGITAL II AUTOR: ENG. ANTONIO CARLOS LEMOS JÚNIOR 52wz1h@bol.com.br UBERABA MG 2º SEMESTRE 2008 CONTEÚDO PROGRAMADO: 1 Flip-Flop J-K 2 Flip-Flop D 3 Latch D 4 Entradas assíncronas 5 Características
Interrupções e Timers
 Interrupções e timers Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 4 de dezembro de 2013 Objetivos Compreender o funcionamento de um display de sete segmentos Compreender
Interrupções e timers Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 4 de dezembro de 2013 Objetivos Compreender o funcionamento de um display de sete segmentos Compreender
FELIPE CAMPOS DE FREITAS CONFIGURAÇÃO E GERENCIAMENTO DO KIT EKI LM3S8962 PARA ACIONAMENTO E CONTROLE DE MÁQUINAS ELÉTRICAS
 FELIPE CAMPOS DE FREITAS CONFIGURAÇÃO E GERENCIAMENTO DO KIT EKI LM3S8962 PARA ACIONAMENTO E CONTROLE DE MÁQUINAS ELÉTRICAS São Carlos 2012 FELIPE CAMPOS DE FREITAS CONFIGURAÇÃO E GERENCIAMENTO DO KIT
FELIPE CAMPOS DE FREITAS CONFIGURAÇÃO E GERENCIAMENTO DO KIT EKI LM3S8962 PARA ACIONAMENTO E CONTROLE DE MÁQUINAS ELÉTRICAS São Carlos 2012 FELIPE CAMPOS DE FREITAS CONFIGURAÇÃO E GERENCIAMENTO DO KIT
28/05/2017. Interface com Conversores A/D e D/A. Interface com Conversores A/D e D/A SEL-433 APLICAÇÕES DE MICROPROCESSADORES I
 SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Prof.
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Prof.
Introdução à Programação II. Nino Pereira
 Introdução à Programação II Nino Pereira Índice Nino Pereira Ler uma entrada digital: exemplo: let infradir=pinb.4 Neste exemplo, a variável infradir fica com o valor lido do pino B.4 do PICAXE. (0 ou
Introdução à Programação II Nino Pereira Índice Nino Pereira Ler uma entrada digital: exemplo: let infradir=pinb.4 Neste exemplo, a variável infradir fica com o valor lido do pino B.4 do PICAXE. (0 ou
OS CONTADORES DIGITAIS
 LIÇÃO 9 OS CONTADORES DIGITAIS 60 Na lição anterior analisamos o princípio de funcionamento de um dos mais importantes blocos da Eletrônica Digital, o flip-flop. Vimos que estes blocos poderiam ter diversos
LIÇÃO 9 OS CONTADORES DIGITAIS 60 Na lição anterior analisamos o princípio de funcionamento de um dos mais importantes blocos da Eletrônica Digital, o flip-flop. Vimos que estes blocos poderiam ter diversos
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10032 Microcontroladores
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10032 Microcontroladores 1 Objetivo Roteiro de Laboratório 6 Pulse-Width-Modulation
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10032 Microcontroladores 1 Objetivo Roteiro de Laboratório 6 Pulse-Width-Modulation
1.2 Registradores relacionados as Interrupções. 3. TOSE Sentido da transição da borda do sinal aplicado am TMR0
 Capítulo 1 Interrupções 1.1 O que são interrupções? Como o nome sugere interrompe a execução normal e exige atenção urgente da CPU. São eventos não previsíveis e assim não pode ser oferecido tempo de CPU
Capítulo 1 Interrupções 1.1 O que são interrupções? Como o nome sugere interrompe a execução normal e exige atenção urgente da CPU. São eventos não previsíveis e assim não pode ser oferecido tempo de CPU
Interface com A/D e D/A
 Interface com A/D e D/A Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Um Microcontrolador/Microprocessador
Interface com A/D e D/A Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Um Microcontrolador/Microprocessador
RTC Real Time Counter e Pinos do JM60
 RTC Real Time Counter e Pinos do JM60 Disciplina: Aplicações Avançadas de Microprocessadores (AAM) Profa. Eduardo Henrique Couto Tópicos da aula: Modos de baixo consumo; RTC; Pinos do JM60; Pinos I/O de
RTC Real Time Counter e Pinos do JM60 Disciplina: Aplicações Avançadas de Microprocessadores (AAM) Profa. Eduardo Henrique Couto Tópicos da aula: Modos de baixo consumo; RTC; Pinos do JM60; Pinos I/O de
Microcontroladores: Programação em C
 Aula 10 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 11/04/2013 1 Conversor A/D Conceitos Conversores analógico digitais (conversores A/D ou ADC) convertem um sinal analógico em um equivalente
Aula 10 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 11/04/2013 1 Conversor A/D Conceitos Conversores analógico digitais (conversores A/D ou ADC) convertem um sinal analógico em um equivalente
Implementando PWM por soft - um método simples. Por Renie S. Marquet reniemarquet.sites.com.br - versão
 Implementando PWM por soft - um método simples. Por Renie S. Marquet reniemarquet.sites.com.br - versão 25.02.2005 O PWM (Pulse Width Modulation Modulação por largura de pulso) consiste em controlar o
Implementando PWM por soft - um método simples. Por Renie S. Marquet reniemarquet.sites.com.br - versão 25.02.2005 O PWM (Pulse Width Modulation Modulação por largura de pulso) consiste em controlar o
Manual Técnico Driver Chopper 5A Para Motor de Passo
 Manual Técnico Driver Chopper 5A Para Motor de Passo Introdução Compatível com motores de passo de até 5 amperes por fase, com tensão de alimentação até 48V, bipolares e unipolares. Este driver possui
Manual Técnico Driver Chopper 5A Para Motor de Passo Introdução Compatível com motores de passo de até 5 amperes por fase, com tensão de alimentação até 48V, bipolares e unipolares. Este driver possui
CANAL ANALÓGICO
 CANAL ANALÓGICO CANAL ANALÓGICO (Introdução) Variáveis analógicas apresentam variação modular em função do tempo, como por exemplo a temperatura, pressão, nível, etc. Para trabalhar com estas variáveis,
CANAL ANALÓGICO CANAL ANALÓGICO (Introdução) Variáveis analógicas apresentam variação modular em função do tempo, como por exemplo a temperatura, pressão, nível, etc. Para trabalhar com estas variáveis,
ELETRÔNICA DIGITAL APLICADA Aula 8- Registradores de deslocamento como contadores
 ELETRÔNICA DIGITAL APLICADA Aula 8- Registradores de deslocamento como contadores Prof.ª Msc. Patricia Pedroso Estevam Ribeiro Email: patriciapedrosoestevam@hotmail.com 26/11/216 1 Registradores de deslocamento
ELETRÔNICA DIGITAL APLICADA Aula 8- Registradores de deslocamento como contadores Prof.ª Msc. Patricia Pedroso Estevam Ribeiro Email: patriciapedrosoestevam@hotmail.com 26/11/216 1 Registradores de deslocamento
Arquitetura PIC - PWM
 Arquitetura PIC - PWM Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Aprender o que é a técnica de PWM Compreender a utilidade da técnica Aprender a utilizar
Arquitetura PIC - PWM Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Aprender o que é a técnica de PWM Compreender a utilidade da técnica Aprender a utilizar
Eletrônica Digital. Circuitos Lógicos Sequenciais PROF. EDUARDO G. BERTOGNA UTFPR / DAELN
 Eletrônica Digital Circuitos Lógicos Sequenciais PROF. EDUARDO G. BERTOGNA UTFPR / DAELN Circuitos Sequenciais vs Combinacionais Os circuitos lógicos combinacionais são aqueles em que suas saídas a qualquer
Eletrônica Digital Circuitos Lógicos Sequenciais PROF. EDUARDO G. BERTOGNA UTFPR / DAELN Circuitos Sequenciais vs Combinacionais Os circuitos lógicos combinacionais são aqueles em que suas saídas a qualquer
EPUSP PCS 2011/2305/2355 Laboratório Digital. Frequencímetro
 Frequencímetro Versão 2014 RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para isto, serão apresentados alguns exemplos de
Frequencímetro Versão 2014 RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para isto, serão apresentados alguns exemplos de
Registradores de Deslocamentos.
 Registradores de Deslocamentos. 1. Introdução: Implementação de um registrador de deslocamento, conversão paralelo-série e série-paralelo, geração de atrasos, contador e implementação de um registrador
Registradores de Deslocamentos. 1. Introdução: Implementação de um registrador de deslocamento, conversão paralelo-série e série-paralelo, geração de atrasos, contador e implementação de um registrador
Universidade Federal do ABC
 Universidade Federal do ABC Eletrônica Digital Aula 09: Considerações Gerais e Aplicações de Flip-Flop TOCCI, Sistemas Digitais, Sec. 5.11-5.23 http://sites.google.com/site/eletdigi/ 1 Entradas Assíncronas
Universidade Federal do ABC Eletrônica Digital Aula 09: Considerações Gerais e Aplicações de Flip-Flop TOCCI, Sistemas Digitais, Sec. 5.11-5.23 http://sites.google.com/site/eletdigi/ 1 Entradas Assíncronas
Arduino. Aula 3 motores
 Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Sistemas Microcontrolados. Período Aula 9. 1 Saulo O. D. Luiz
 Sistemas Microcontrolados Período 2009.2 Aula 9 1 Saulo O. D. Luiz Roteiro Módulos CCP Captura Comparação Modulação por largura de pulso (PWM) 2 Saulo O. D. Luiz Módulos CCP Os módulos CCP são formados
Sistemas Microcontrolados Período 2009.2 Aula 9 1 Saulo O. D. Luiz Roteiro Módulos CCP Captura Comparação Modulação por largura de pulso (PWM) 2 Saulo O. D. Luiz Módulos CCP Os módulos CCP são formados
Conversor Analógico Digital do MSP430G2553
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO TÉCNICO INTEGRADO DE NÍVEL MÉDIO - ELETRÔNICA MICROCONTROLADORES 2 Conversor Analógico Digital do MSP430G2553 O MSP430G2553
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO TÉCNICO INTEGRADO DE NÍVEL MÉDIO - ELETRÔNICA MICROCONTROLADORES 2 Conversor Analógico Digital do MSP430G2553 O MSP430G2553
Sistemas Microprocessados
 Sistemas Microprocessados satoutfpredubr http://pessoal.utfpr.edu.br/sato/ Temporizadores e Contadores do ATmega8 satoutfpredubr Sobre o material Essas transparências foram
Sistemas Microprocessados satoutfpredubr http://pessoal.utfpr.edu.br/sato/ Temporizadores e Contadores do ATmega8 satoutfpredubr Sobre o material Essas transparências foram
Microcontroladores. Contadores e Temporizadores. Prof. Guilherme Peron Prof. Heitor S. Lopes Prof. Ronnier Rohrich Prof. Rubão
 Microcontroladores Contadores e Temporizadores Prof. Guilherme Peron Prof. Heitor S. Lopes Prof. Ronnier Rohrich Prof. Rubão Introdução Como fazer um temporizador? 2 maneiras 2 Introdução Como fazer um
Microcontroladores Contadores e Temporizadores Prof. Guilherme Peron Prof. Heitor S. Lopes Prof. Ronnier Rohrich Prof. Rubão Introdução Como fazer um temporizador? 2 maneiras 2 Introdução Como fazer um
Universidade Federal de Pernambuco
 Universidade Federal de Pernambuco Departamento de Eletrônica e Sistemas Prática 1: Modulação em Largura de Pulso (PWM) Circuitos de Comunicação Professor: Hélio Magalhães Alberto Rodrigues Vitor Parente
Universidade Federal de Pernambuco Departamento de Eletrônica e Sistemas Prática 1: Modulação em Largura de Pulso (PWM) Circuitos de Comunicação Professor: Hélio Magalhães Alberto Rodrigues Vitor Parente
UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIA E TECNOLOGIA ENGENHARIA ELÉTRICA
 UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIA E TECNOLOGIA ENGENHARIA ELÉTRICA RELATÓRIO CONTADOR DE 6 BITS PROGRAMÁVEL Trabalho apresentado à disciplina de Projeto de Circuitos Integrados Digitais,
UNIVERSIDADE FEDERAL DO PARANÁ SETOR DE CIÊNCIA E TECNOLOGIA ENGENHARIA ELÉTRICA RELATÓRIO CONTADOR DE 6 BITS PROGRAMÁVEL Trabalho apresentado à disciplina de Projeto de Circuitos Integrados Digitais,
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Projeto de sistema de controle digital PID com Arduino Prof. Dr. Marcos Lajovic Carneiro Referência: Ivan Seidel https://www.youtube.com/watch?v=txftr4tqkya
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Projeto de sistema de controle digital PID com Arduino Prof. Dr. Marcos Lajovic Carneiro Referência: Ivan Seidel https://www.youtube.com/watch?v=txftr4tqkya
Aula 10 Microcontrolador Intel 8051 Parte 1
 Aula 10 Microcontrolador Intel 8051 Parte 1 SEL 0415 INTROD. À ORGANIZAÇÃO DE COMPUTADORES Prof. Dr. Marcelo A. C. Vieira SEL 0415 Microcontroladores Grupo de Sistemas Digitais n Microcontrolador é o nome
Aula 10 Microcontrolador Intel 8051 Parte 1 SEL 0415 INTROD. À ORGANIZAÇÃO DE COMPUTADORES Prof. Dr. Marcelo A. C. Vieira SEL 0415 Microcontroladores Grupo de Sistemas Digitais n Microcontrolador é o nome
INTRODUÇÃO: MICROCONTROLADORES
 INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
Lista de Exercícios 1
 Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS2322 c) Interrupções Lista de Exercícios 1 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS2322 c) Interrupções Lista de Exercícios 1 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
FEI PROVA P1 SISTEMAS DIGITAIS II - NE /04/ TURMA A - Duração 80 min Sem Consulta Interpretação faz parte da prova. N.
 FEI PROVA P1 SISTEMAS DIGITAIS II - NE 7720 04/04/2009 - TURMA A - Duração 80 min Sem Consulta Interpretação faz parte da prova. N.o N.o da Lista Nome...Nota... 1.a Questão: (Valor 2,0) Para o circuito
FEI PROVA P1 SISTEMAS DIGITAIS II - NE 7720 04/04/2009 - TURMA A - Duração 80 min Sem Consulta Interpretação faz parte da prova. N.o N.o da Lista Nome...Nota... 1.a Questão: (Valor 2,0) Para o circuito
Sistema Digitais. Bacharelado de Informática UEM DIN - Prof. Elvio 2017
 5197 - Sistema Digitais Bacharelado de Informática UEM DIN - Prof. Elvio 2017 Roteiro ATmega328 (Interrupções) ATmega328 (Interrupções Externas) ATmega328 (Portas de E/S) ATmega328 (Temporizador/Contador
5197 - Sistema Digitais Bacharelado de Informática UEM DIN - Prof. Elvio 2017 Roteiro ATmega328 (Interrupções) ATmega328 (Interrupções Externas) ATmega328 (Portas de E/S) ATmega328 (Temporizador/Contador
Circuitos de Comunicação. Prática 1: PWM
 Circuitos de Comunicação Prática 1: PWM Professor: Hélio Magalhães Grupo: Geraldo Gomes, Paulo José Nunes Recife, 04 de Maio de 2014 SUMÁRIO Resumo 3 Parte I PWM - Teoria 3 Geração do PWM 5 Parte II Prática
Circuitos de Comunicação Prática 1: PWM Professor: Hélio Magalhães Grupo: Geraldo Gomes, Paulo José Nunes Recife, 04 de Maio de 2014 SUMÁRIO Resumo 3 Parte I PWM - Teoria 3 Geração do PWM 5 Parte II Prática
CAPÍTULO 7 CONTADORES
 CAPÍTULO 7 CONTADORES Introdução Contadores Assíncronos (Ripple) MOD número Divisão de Frequência Atraso de propagação nos contadores assíncronos Contadores Síncronos Contadores com MODnumber < 2 N Contadores
CAPÍTULO 7 CONTADORES Introdução Contadores Assíncronos (Ripple) MOD número Divisão de Frequência Atraso de propagação nos contadores assíncronos Contadores Síncronos Contadores com MODnumber < 2 N Contadores
Redes de Computadores I
 Redes de Computadores I Prof.ª Inara Santana Ortiz Aula 4 Camada Física Camada Física - Sinais Funções Características físicas (mecânicas e elétricas) das interfaces e dos meios. Define quais os tipos
Redes de Computadores I Prof.ª Inara Santana Ortiz Aula 4 Camada Física Camada Física - Sinais Funções Características físicas (mecânicas e elétricas) das interfaces e dos meios. Define quais os tipos
Redes de Computadores
 Redes de Computadores Prof. Macêdo Firmino Camada Física Macêdo Firmino (IFRN) Redes de Computadores Setembro de 2011 1 / 32 Pilha TCP/IP A B M 1 Aplicação Aplicação M 1 Cab M T 1 Transporte Transporte
Redes de Computadores Prof. Macêdo Firmino Camada Física Macêdo Firmino (IFRN) Redes de Computadores Setembro de 2011 1 / 32 Pilha TCP/IP A B M 1 Aplicação Aplicação M 1 Cab M T 1 Transporte Transporte
UNIVERSIDADE FEDERAL DO PARANÁ JOÃO PAULO CAMELO CUNHA MATEUS LOVATEL MATIAS INVERSOR PROJETO 1: CONTROLE DE CORRENTE NA CARGA (GRID-TIE)
") UNIVERSIDADE FEDERAL DO PARANÁ JOÃO PAULO CAMELO CUNHA MATEUS LOVATEL MATIAS INVERSOR PROJETO 1: CONTROLE DE CORRENTE NA CARGA (GRID-TIE) CURITIBA 2014 JOÃO PAULO CAMELO CUNHA MATEUS LOVATEL MATIAS INVERSOR
UNIVERSIDADE FEDERAL DO PARANÁ JOÃO PAULO CAMELO CUNHA MATEUS LOVATEL MATIAS INVERSOR PROJETO 1: CONTROLE DE CORRENTE NA CARGA (GRID-TIE) CURITIBA 2014 JOÃO PAULO CAMELO CUNHA MATEUS LOVATEL MATIAS INVERSOR
Sistemas Microcontrolados
 Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
Eletrônica e Circuitos Digitais Aula 14 Contadores e Registradores. Daniel S Batista
 Eletrônica e Circuitos Digitais Aula 14 Contadores e Registradores Daniel S Batista Daniel.Strufaldi@gmail.com Organização Contadores assíncronos Contadores de módulo < 2 N. Circuitos integrados de contadores
Eletrônica e Circuitos Digitais Aula 14 Contadores e Registradores Daniel S Batista Daniel.Strufaldi@gmail.com Organização Contadores assíncronos Contadores de módulo < 2 N. Circuitos integrados de contadores
Técnicas de Interface: conversor A/D e D/A
 Técnicas de Interface: conversor A/D e D/A Prof. Adilson Gonzaga Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital
Técnicas de Interface: conversor A/D e D/A Prof. Adilson Gonzaga Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital
EL08D - MICROCONTROLADORES
 Curso Técnico de Nível Médio Integrado Eletrônica - 8o Período Disciplina de Microcontroladores 2 (EL08D) 1º Sem 2016 Professor Gabriel Kovalhuk Email: kovalhuk@utfpr.edu.br Página pessoal: http://paginapessoal.utfpr.edu.br/kovalhuk
Curso Técnico de Nível Médio Integrado Eletrônica - 8o Período Disciplina de Microcontroladores 2 (EL08D) 1º Sem 2016 Professor Gabriel Kovalhuk Email: kovalhuk@utfpr.edu.br Página pessoal: http://paginapessoal.utfpr.edu.br/kovalhuk
Objetivos MICROCONTROLADORES HARDWARE. Aula 03: Periféricos. Prof. Mauricio. MICRO I Prof. Mauricio 1. Arquitetura de um Microcontrolador
 MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Aula 03: Objetivos 2 Arquitetura de um Microcontrolador Unidade Central de Processamento Portas de Entrada e Saída Porta Serial Temporizador / Contador Conversor
MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Aula 03: Objetivos 2 Arquitetura de um Microcontrolador Unidade Central de Processamento Portas de Entrada e Saída Porta Serial Temporizador / Contador Conversor
Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO
 Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO PROXSYS Versão 1.3 Abril -2015 Controlador Industrial CP-WS1 1- Configurações
Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO PROXSYS Versão 1.3 Abril -2015 Controlador Industrial CP-WS1 1- Configurações
Lógica Reconfigurável
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA Lógica Reconfigurável - amauriassef@utfpr.edu.br
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA MESTRADO EM SISTEMAS DE ENERGIA Lógica Reconfigurável - amauriassef@utfpr.edu.br
AULA 5 Aplicação com divisor de freqüência com o CI Livro Texto pág.197 a 200.
 AULA 5 Aplicação com divisor de freqüência com o CI 74293. Livro Texto pág.197 a 200. 1. Contadores Assíncronos comerciais CI 74293. 1.1 Configuração Interna. 1.2 Bloco contador assincrono ou modulante,
AULA 5 Aplicação com divisor de freqüência com o CI 74293. Livro Texto pág.197 a 200. 1. Contadores Assíncronos comerciais CI 74293. 1.1 Configuração Interna. 1.2 Bloco contador assincrono ou modulante,
Eletrônica Digital para Instrumentação. Herman Lima Jr.
 G03 Eletrônica Digital para Instrumentação Prof: hlima@cbpf.br Centro Brasileiro de Pesquisas Físicas Ministério da Ciência, Tecnologia e Inovação (MCTI) Parâmetros de circuitos integrados lógicos Dispositivos
G03 Eletrônica Digital para Instrumentação Prof: hlima@cbpf.br Centro Brasileiro de Pesquisas Físicas Ministério da Ciência, Tecnologia e Inovação (MCTI) Parâmetros de circuitos integrados lógicos Dispositivos
EPUSP PCS 2011/2305/2355 Laboratório Digital. Freqüencímetro
 Freqüencímetro E.T.M./2005 E.T.M./2006 (revisão) RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para isto, serão apresentados
Freqüencímetro E.T.M./2005 E.T.M./2006 (revisão) RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para isto, serão apresentados
Sistemas Microcontrolados
 Ciência da Computação Sistemas Microcontrolados Função dos Registradores no PIC Prof. Sergio F. Ribeiro Os Registradores Especiais que Controlam Tudo Vimos que configurações podem ser feitas para definir
Ciência da Computação Sistemas Microcontrolados Função dos Registradores no PIC Prof. Sergio F. Ribeiro Os Registradores Especiais que Controlam Tudo Vimos que configurações podem ser feitas para definir
Sistemas Microcontrolados
 Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
EXPERIÊNCIA 4: IMPLEMENTAÇÃO DE UM CRONÔMETRO
 EXPERIÊNCIA 4: IMPLEMENTAÇÃO DE UM CRONÔMETRO Autores: Prof. Dr. André Riyuiti Hirakawa, Prof. Dr. Carlos Eduardo Cugnasca e Prof. Dr. Paulo Sérgio Cugnasca Versão 1.0-05/2005 1. OBJETIVO Esta experiência
EXPERIÊNCIA 4: IMPLEMENTAÇÃO DE UM CRONÔMETRO Autores: Prof. Dr. André Riyuiti Hirakawa, Prof. Dr. Carlos Eduardo Cugnasca e Prof. Dr. Paulo Sérgio Cugnasca Versão 1.0-05/2005 1. OBJETIVO Esta experiência
Eletrônica Digital II
 FACULDADE SANTO AGOSTINHO - FSA ENGENHARIA ELÉTRICA Eletrônica Digital II Prof. Fábio Leite, Esp Tópicos Contadores síncronos Contadores síncronos de módulo < 2 N Contadores síncronos decrescentes Contadores
FACULDADE SANTO AGOSTINHO - FSA ENGENHARIA ELÉTRICA Eletrônica Digital II Prof. Fábio Leite, Esp Tópicos Contadores síncronos Contadores síncronos de módulo < 2 N Contadores síncronos decrescentes Contadores
Lista de Exercícios 2
 Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS232 c) Interrupções Lista de Exercícios 2 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS232 c) Interrupções Lista de Exercícios 2 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Arquitetura PIC - Interrupções e timers + Motores de passo
 Arquitetura PIC - e timers + Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 e timers no PIC Guilherme Luiz Moritz Avaliação UTFPR - Engenharia industrial elétrica
Arquitetura PIC - e timers + Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 e timers no PIC Guilherme Luiz Moritz Avaliação UTFPR - Engenharia industrial elétrica
PLANO DE ENSINO. Período Letivo:2016-1
 Fone (49) 353-4300 PLANO DE ENSINO BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO Componente Curricular: Microcontroladores Carga Horária: 60h Professor: Giovani Pasetti 1. Ementa Período Letivo:016-1
Fone (49) 353-4300 PLANO DE ENSINO BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO Componente Curricular: Microcontroladores Carga Horária: 60h Professor: Giovani Pasetti 1. Ementa Período Letivo:016-1
NOTAS DE AULA NE7720 SISTEMAS DIGITAIS - II AULA
 AULA 17 - Nível de Transferência entre Registradores RTL. Livro texto, pág.242 a 276 e apostila de fluxo de dados. 1. Introdução:.Continuação projeto RTL. Exemplo 5.2: Medidor de distância baseado em raio
AULA 17 - Nível de Transferência entre Registradores RTL. Livro texto, pág.242 a 276 e apostila de fluxo de dados. 1. Introdução:.Continuação projeto RTL. Exemplo 5.2: Medidor de distância baseado em raio
EPUSP PCS 2011/2305/2355 Laboratório Digital. Frequencímetro
 Frequencímetro E.T.M./2005 E.T.M./2006 (revisão) E.T.M./2011 (revisão) RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para
Frequencímetro E.T.M./2005 E.T.M./2006 (revisão) E.T.M./2011 (revisão) RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para
HardFlex 4VFI e 2 VFO
 Cód. Doc.: CT0902 Descrição do Produto O módulo HardFlex é uma função de software que configura o hardware dos mircrocontroladores GR350, GR35, GR370 e GR37 da Série Grano, para implementar 4 entradas
Cód. Doc.: CT0902 Descrição do Produto O módulo HardFlex é uma função de software que configura o hardware dos mircrocontroladores GR350, GR35, GR370 e GR37 da Série Grano, para implementar 4 entradas
Parte II Arquitetura. professorferlin.blogspot.com. professorferlin.blogspot.com. Sociedade Paranaense de Ensino e Informática
 www.spei.br Sociedade Paranaense de Ensino e Informática Parte II Arquitetura 2 1 Estrutura Básica 3 4 2 Arquitetura Básica 5 CLP x Computador A fonte de alimentação possui características ótimas de filtragem
www.spei.br Sociedade Paranaense de Ensino e Informática Parte II Arquitetura 2 1 Estrutura Básica 3 4 2 Arquitetura Básica 5 CLP x Computador A fonte de alimentação possui características ótimas de filtragem
Montagem do Robô. Especificações. domingo, 28 de agosto de 11
 Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
EPUSP PCS 2011/2305/2355 Laboratório Digital. Frequencímetro
 Frequencímetro Versão 2012 RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para isto, serão apresentados alguns exemplos de
Frequencímetro Versão 2012 RESUMO Esta experiência tem como objetivo a familiarização com duas classes de componentes: os contadores e os registradores. Para isto, serão apresentados alguns exemplos de
Funções dos Microcontroladores Microcontroladores e Microprocessadores Especialização em Automação Industrial
 Funções dos Microcontroladores Microcontroladores e Microprocessadores Especialização em Automação Industrial 1 LCD - PIC Configure um projeto normalmente e na aba LCD (External) marque as opções Use LCD
Funções dos Microcontroladores Microcontroladores e Microprocessadores Especialização em Automação Industrial 1 LCD - PIC Configure um projeto normalmente e na aba LCD (External) marque as opções Use LCD
Ex.: Rotinas de tempo
 Ex.: Rotinas de tempo ORG 0000h PADRAO EQU 11111110b PORTA EQU P1 VBASE EQU 0800h mov r0,# PADRAO inicio: mov PORTA,r0 ;***********TEMPO DE 1S ************ mov dptr,#vbase ; Tt= 2T espera1: mov r1,#0f2h
Ex.: Rotinas de tempo ORG 0000h PADRAO EQU 11111110b PORTA EQU P1 VBASE EQU 0800h mov r0,# PADRAO inicio: mov PORTA,r0 ;***********TEMPO DE 1S ************ mov dptr,#vbase ; Tt= 2T espera1: mov r1,#0f2h
Profª Danielle Casillo
 UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Programação Ladder-SPDSW Profª Danielle Casillo Tipos de dados Todas as informações adquiridas e processadas pelo
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Programação Ladder-SPDSW Profª Danielle Casillo Tipos de dados Todas as informações adquiridas e processadas pelo
TREINADOR LÓGICO. O treinador lógico destina-se ao desenvolvimento de experiências com circuitos digitais em Laboratório Convencional.
 TREINADOR LÓGICO O treinador lógico destina-se ao desenvolvimento de experiências com circuitos digitais em Laboratório Convencional. Visão geral: 1 A concepção inicial desse treinador é para ensaios com
TREINADOR LÓGICO O treinador lógico destina-se ao desenvolvimento de experiências com circuitos digitais em Laboratório Convencional. Visão geral: 1 A concepção inicial desse treinador é para ensaios com
PROJETOS DE TÓPICOS ESPECIAIS 2º SEMESTRE 2015 Professor Dr. Amauri Amorin Assef. Iniciar enviando os caracteres para escrever UTFPR na tela do PC:
 1 PROJETOS DE TÓPICOS ESPECIAIS 2º SEMESTRE 2015 Professor Dr. Amauri Amorin Assef 1) Controlador PWM com frequência ajustável entre 20 khz e 50 khz (passo de 5 khz), razão cíclica entre 0 e 100% (passo
1 PROJETOS DE TÓPICOS ESPECIAIS 2º SEMESTRE 2015 Professor Dr. Amauri Amorin Assef 1) Controlador PWM com frequência ajustável entre 20 khz e 50 khz (passo de 5 khz), razão cíclica entre 0 e 100% (passo
TIMER2 no ATMEL AT89S8252 TIMER 2 - CARACTERISTICAS TIMER 2 MODOS
 TIMER2 no ATMEL AT89S8252 Aplicações de Microprocessadores 2006/2007 TIMER 2 - CARACTERISTICAS Temporizador / Contador de 16 bits Funcionamento como Temporizador (conta ciclos máquina = 1/12 da Freq. Relógio)
TIMER2 no ATMEL AT89S8252 Aplicações de Microprocessadores 2006/2007 TIMER 2 - CARACTERISTICAS Temporizador / Contador de 16 bits Funcionamento como Temporizador (conta ciclos máquina = 1/12 da Freq. Relógio)
Sistemas Digitais Módulo 10 Circuitos Sequenciais: Latches e Flip-Flops
 Universidade Federal de Uberlândia Faculdade de Computação Sistemas Digitais Módulo 0 Circuitos Sequenciais: Latches e Flip-Flops Graduação em Sistemas de Informação Disciplina: Sistemas Digitais Prof.
Universidade Federal de Uberlândia Faculdade de Computação Sistemas Digitais Módulo 0 Circuitos Sequenciais: Latches e Flip-Flops Graduação em Sistemas de Informação Disciplina: Sistemas Digitais Prof.
UFJF FABRICIO CAMPOS
 Cap 7 Revisão Teoremas Booleanos Teoremas de De Morgan Portas Lógicas Flip-Flop Mapa de Karnaugh Simbologias Representação Binária Tabela Verdade Cap 7 Revisão Teoremas Booleanos Teoremas de De Morgan
Cap 7 Revisão Teoremas Booleanos Teoremas de De Morgan Portas Lógicas Flip-Flop Mapa de Karnaugh Simbologias Representação Binária Tabela Verdade Cap 7 Revisão Teoremas Booleanos Teoremas de De Morgan
TABELA DO F/F. T Q n Q n+1
 EXERCÍCIOS DE SISTEMAS DIGITAIS II PREPARAÇÃO PARA P1 DE NE 772 1. Partindo de um F/F do tipo D, construir um F/F do tipo T. Pede-se : a ) A equação de estados do F/F b) Circuito transformado em F/F tipo
EXERCÍCIOS DE SISTEMAS DIGITAIS II PREPARAÇÃO PARA P1 DE NE 772 1. Partindo de um F/F do tipo D, construir um F/F do tipo T. Pede-se : a ) A equação de estados do F/F b) Circuito transformado em F/F tipo
Prof. Gabriel Kovalhuk
 Curso Técnico de Nível Médio Integrado Eletrônica - 8º Período Disciplina de Microcontroladores 2 (EL08D) 1º Sem 2016 Professor Gabriel Kovalhuk Email: kovalhuk@utfpr.edu.br Página pessoal: http://paginapessoal.utfpr.edu.br/kovalhuk
Curso Técnico de Nível Médio Integrado Eletrônica - 8º Período Disciplina de Microcontroladores 2 (EL08D) 1º Sem 2016 Professor Gabriel Kovalhuk Email: kovalhuk@utfpr.edu.br Página pessoal: http://paginapessoal.utfpr.edu.br/kovalhuk
Sistemas Microprocessados
 Sistemas Microprocessados satoutfpredubr http://pessoal.utfpr.edu.br/sato/ Temporizadores e Contadores do 8051 satoutfpredubr Sobre o material Essas transparências foram baseadas
Sistemas Microprocessados satoutfpredubr http://pessoal.utfpr.edu.br/sato/ Temporizadores e Contadores do 8051 satoutfpredubr Sobre o material Essas transparências foram baseadas
LÓGICA DIGITAL CONCEITOS DE CLOCK RELÓGIOS (CLOCK) Prof. Celso Candido ADS / REDES / ENGENHARIA
 Prof. Celso Candido ADS / REDES / ENGENHARIA") RELÓGIOS (CLOCK) 1 Em muitos circuitos digitais, a ordem em que os eventos ocorrem é crítica. Às vezes um evento deve preceder outro, ou então dois eventos deverão ocorrer simultaneamente, para as relações
RELÓGIOS (CLOCK) 1 Em muitos circuitos digitais, a ordem em que os eventos ocorrem é crítica. Às vezes um evento deve preceder outro, ou então dois eventos deverão ocorrer simultaneamente, para as relações
MICROCONTROLADORES 2 EL08D - TURMA M12
 MICROCONTROLADORES 2 EL08D - TURMA M12 SISTEMA DE RESET E SISTEMA DE CLOCK Prof. Gabriel Kovalhuk E-mail: Kovalhuk@utfpr.edu.br Site: http://pessoal.utfpr.edu.br/kovalhuk MSP430 SISTEMAS DE RESET E SISTEMAS
MICROCONTROLADORES 2 EL08D - TURMA M12 SISTEMA DE RESET E SISTEMA DE CLOCK Prof. Gabriel Kovalhuk E-mail: Kovalhuk@utfpr.edu.br Site: http://pessoal.utfpr.edu.br/kovalhuk MSP430 SISTEMAS DE RESET E SISTEMAS
INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA ELETRÔNICA DEPARTAMENTO DE ELETRÔNICA APLICADA TIMER 555
 ELE-59 Circuitos de Chaveamento Prof.: Alexis Fabrício Tinoco S. INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA ELETRÔNICA DEPARTAMENTO DE ELETRÔNICA APLICADA TIMER 555 1. OBJETIVOS: Os objetivos
ELE-59 Circuitos de Chaveamento Prof.: Alexis Fabrício Tinoco S. INSTITUTO TECNOLÓGICO DE AERONÁUTICA DIVISÃO DE ENGENHARIA ELETRÔNICA DEPARTAMENTO DE ELETRÔNICA APLICADA TIMER 555 1. OBJETIVOS: Os objetivos
TABELA DO F/F. T Q n Q n+1
 EXERCÍCIOS DE SISTEMAS DIGITAIS II PREPARAÇÃO PARA P1 DE SD - I 1. Partindo de um F/F do tipo D, construir um F/F do tipo T. Pede-se : a ) A equação de estados do F/F b) Circuito transformado em F/F tipo
EXERCÍCIOS DE SISTEMAS DIGITAIS II PREPARAÇÃO PARA P1 DE SD - I 1. Partindo de um F/F do tipo D, construir um F/F do tipo T. Pede-se : a ) A equação de estados do F/F b) Circuito transformado em F/F tipo
Mapeamento de memória e conexões do Controlador CP-WS12EX-32K/OEM
 Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS Mapeamento de memória e conexões do Controlador CP-WSEX-K/OEM PROXSYS Versão. Agosto-04 Controlador Industrial CP-WS - Configurações de Hardware
Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS Mapeamento de memória e conexões do Controlador CP-WSEX-K/OEM PROXSYS Versão. Agosto-04 Controlador Industrial CP-WS - Configurações de Hardware
ENGC40 - Eletrônica Digital
 ENGC40 - Eletrônica Digital 1 a Lista de Exercícios Prof. Paulo Farias 1 de setembro de 2011 1. A Figura 1 mostra um circuito multiplicador que recebe dois números binários x 1 x 0 e y 1 y 0 e gera a saída
ENGC40 - Eletrônica Digital 1 a Lista de Exercícios Prof. Paulo Farias 1 de setembro de 2011 1. A Figura 1 mostra um circuito multiplicador que recebe dois números binários x 1 x 0 e y 1 y 0 e gera a saída
Capítulo 3 Circuitos lógicos seqüenciais: flip-flops, latches, contadores e registradores
 Capítulo 3 Circuitos lógicos seqüenciais: flip-flops, latches, contadores e registradores Introdução Circuitos combinacionais x sequenciais Elemento básico: FLIP-FLOP (FF) Armazena informação (reter estado)
Capítulo 3 Circuitos lógicos seqüenciais: flip-flops, latches, contadores e registradores Introdução Circuitos combinacionais x sequenciais Elemento básico: FLIP-FLOP (FF) Armazena informação (reter estado)