Curvas e Superfícies. Profª Soraia Raupp Musse
|
|
|
- Sonia Monteiro Figueira
- 6 Há anos
- Visualizações:
Transcrição
1 Curvas e Superfícies Profª Soraia Raupp Musse
2 Classificação Curvas Apenas comprimento 2
3 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3

4 Classificação Sólidos O interior também interessa Isto é um sólido? 4
5 Problema: Gerar uma curva suave que passe por pontos específicos B A C D 5
6 Solução: gerar uma curva no espaço, distribuindo pontos de maneira suave B A C D
7 Interpolação Princípio básico Alterar de forma incremental a posição de um ponto no espaço A base para a maioria das técnicas de animação é algum tipo de interpolação de valores.
8 Interpolação X Aproximação
9 Interpolação X Aproximação Na interpolação, a curva passa sobre todos os pontos definidos. Na aproximação, a curva começa sobre o ponto inicial e termina sobre o final. Os demais pontos são aproximados. Hermite, Catmull-Rom spline Bézier, curvas B-spline
10 Como podemos representar uma curva? Localização no espaço de um ponto que se move Como podemos descrever este conceito? 10

11 Possibilidades de Representações Alguns objetos podem ter mais de uma possibilidade para serem representados Exemplo: círculo centrado na origem com raio=1 x 2 y 2 Paramétrica1
12 Possibilidades de Representações Alguns objetos podem ter mais de uma possibilidade para serem representados Exemplo: círculo centrado na origem com raio=1 x 2 y 2 1 x( ) cos y( ) sen Implícita Paramétrica/explícita
13 Possibilidades de Representações Implícita: definida através de duas variáveis, mas não é dada uma maneira explícita de resolver y em função de x Função explícita de x e y em função de outra variável. x 2 y 2 1 x( ) cos y( ) sen Implícita Paramétrica
14 Tipos de Representação Representação não-paramétrica Representação por equações onde uma das coordenadas é determinada em função das outras Equações explícitas: y = f(x) Adequadas para a geração de novos pontos Exemplos Equações implícitas: f(x,y) = 0 Boas para fazer consistência Exemplos
15 Tipos de Representação Principais desvantagens das representações nãoparamétrica em CG É difícil definir a equação não paramétrica de uma curva que passe por um conjunto de pontos prédefinidos. Não permite a representação de curvas com laços 15
16 Tipos de Representação Representação Paramétrica Representação por equações onde as coordenadas são obtidas em função de um parâmetro Equações paramétricas: x = f(t) e y = g(t) Adequadas para gerar uma seqüência de pontos Classificadas de acordo com seus termos: linear (grau 1), quadrática (grau 2), cúbica (grau 3), transcendental (sin, cos, log,...)
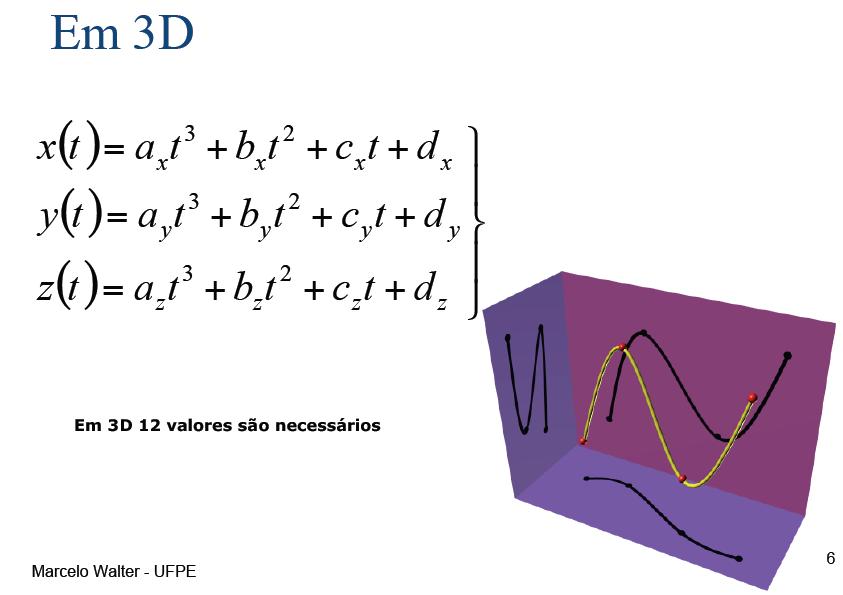
17 Tipos de Representação Forma paramétrica Curvas paramétricas x = f(u) y = g(u) z = h(u) Superfícies Paramétricas x = f(u,v) y = g(u,v) z = h(u,v) Exemplo de equações paramétricas x = x0 + r cos α y = y0 + r sin α αe[0,2π] 17
18 Tipos de Representação Principais vantagens das formas paramétricas em CG Resolve os problemas da forma não paramétrica. A curva pode ser definida a partir de pontos de controle (é fácil de manipular interativamente). A curva pode ou não passar por um conjunto de pontos prédefinidos. A curva é aproximada por polinômios que definem as suas várias partes. O comportamento da curva em relação a cada um dos eixos é definido por equações independentes As coordenadas são obtidas em função de um parâmetro 18
19 Representação Paramétrica Para CG, representações paramétricas costumam ser as mais convenientes Assim, genericamente, uma curva 3D é Q(t)=[x(t) y(t) z(t)] x(t), y(t), z(t) são chamadas de funções-base (blending functions)

20 Representação Paramétrica A curva é definida através de um conjunto de pontos de controle que influenciam a forma da curva. Os nós são pontos de controle que pertencem à curva. A curva pode ser interpolada, passando nesse caso por todos os pontos de controle, ou pode ser aproximada, passando apenas em alguns pontos de controle ou mesmo nenhum. Os pontos de controle definem a fronteira de um polígono designado por convex hull. 20
21 Representação Paramétrica Parâmetro (t) é usado para percorrer a curva Pode ser associado ao tempo x(t) = fx(t) y(t) = fy(t) z(t) = fz(t)
22 Reta Paramétrica P(t)= P 0 + at P x = P x0 + at P y = P y0 + at P z = P z0 + at 22
23 Complexidade Quanto mais simples a equação da função de interpolação, mais rápida sua avaliação. Polinômios são fáceis de avaliar Mas... polinômios de que grau? f ( t) at b f t) at 2 bt c 3 2 ( f ( t) at bt ct d Linear Quadrático Cúbico
24 Complexidade Impacta na eficiência do algoritmo Grau menor que 3: Pouca flexibilidade. Grau maior que 3: Maior custo computacional com pouca vantagem prática. Por padrão, usa-se cúbicas. f ( t) at 3 bt 2 ct d
25 25
26 26
27 Continuidade Questão fundamental Métodos adequados: Hermite Catmull-Rom Blending de parábolas Curvas Bézier...
28 Continuidade Para assegurar a continuidade entre segmentos de curva, definem-se restrições adicionais de continuidade 2 tipos de continuidade: Continuidade paramétrica, denotada por C n onde n = grau de continuidade Continuidade geométrica, denotada por G n 28
29 Continuidade Continuidade Geométrica G0 Continuidade Paramétrica C0 Dois segmentos se encontram em um ponto Continuidade Geométrica G1 Direção das tangentes dos segmentos são iguais no ponto de junção Continuidade Paramétrica C1 Direção e magnitude das tangentes dos segmentos são iguais no ponto de junção Continuidade Paramétrica C2 Segunda derivada é igual, ou seja, a mesma aceleração 29
30 Controle Local Global
31 Métodos para representar curvas Hermite Bézier B-Spline

32 Hermite Definida a partir de restrições no ponto inicial e no ponto final. Os pontos propriamente ditos: P0 e P1 Vetores tangentes nestes pontos: m0 e m1
33 Hermite R 1 P 1 P 4 R 4 33
34 Hermite Vantagens Bem fácil de implementar Adequada para aplicações onde seja útil definir a curva em função dos vetores tangentes Passa nos pontos de controle (interpolação) Desvantagens Não garante, de forma automática, a continuidade entre os segmentos de curva É necessário os vetores tangentes terem a mesma direção e sentido Não permite controle local Alteração de um ponto de controle altera toda a curva 34
35 // use the parametric time value 0 to 1 for(int i=0;i!=lod;++i) { float Geometry[4][3] = { { 10,10,0 }, // Point1 {-10,5,-2 }, // Point2 { 5,-5,0 }, // Tangent1 { 5,10,0 } // Tangent2 }; unsigned int LOD=20; float t = (float)i/(lod-1); // calculate blending functions float b0 = 2*t*t*t - 3*t*t + 1; float b1 = -2*t*t*t + 3*t*t; float b2 = t*t*t - 2*t*t + t; float b3 = t*t*t - t*t; // calculate the x,y and z of the curve point float x = b0*geometry[0][0] + b1*geometry[1][0] + b2*geometry[2][0] + b3*geometry[3][0] ; float y = b0*geometry[0][1] + b1*geometry[1][1] + b2*geometry[2][1] + b3*geometry[3][1] ; Código float z = b0*geometry[0][2] + b1*geometry[1][2] + b2*geometry[2][2] + b3*geometry[3][2] ; } // specify the point glvertex3f( x,y,z ); 35
36 Bézier Curva polinomial desenvolvida em 1962 por Pierre Bézier. Utilizada no projeto de automóveis (Renault). Baseada no algoritmo de De Casteljau em Curva de aproximação. Controle global.
37 Bézier
38 Bézier P(t)= (1 t) 2 P t (1 t) P 1 + t 2 P 2
39 Bézier P(t) = (1 t) 3 P t (1 t) 2 P t 2 (1 t) P 2 + t 3 P 3
40 // use the parametric time value 0 to 1 for(int i=0;i!=lod;++i) { float Geometry[4][3] = { { 10,10,0 }, // Point1 {-10,5,-2 }, // Point2 { 5,-5,0 }, // Tangent1 { 5,10,0 } // Tangent2 }; unsigned int LOD=20; float t = (float)i/(lod-1); float it = 1.0f-t; // calculate blending functions float b0 = t*t*t; float b1 = 3*t*t*it; float b2 = 3*t*it*it; float b3 = it*it*it; // calculate the x,y and z of the curve point float x = b0*geometry[0][0] + b1*geometry[1][0] + b2*geometry[2][0] + b3*geometry[3][0] ; float y = b0*geometry[0][1] + b1*geometry[1][1] + b2*geometry[2][1] + b3*geometry[3][1] ; float z = b0*geometry[0][2] + b1*geometry[1][2] + b2*geometry[2][2] + b3*geometry[3][2] ; } // specify the point glvertex3f( x,y,z ); 40
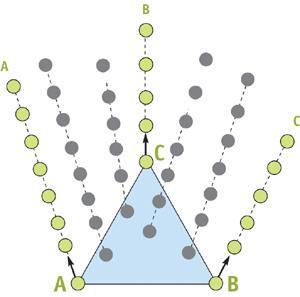
41 Bézier De Casteljau: algoritmo geométrico para construção de curvas Bézier.
42 Algoritmo de De Casteljau p 1 p 12 u = 0.25 p 01 p 02 p 0 p 2
43 Algoritmo de De Casteljau p 1 u = 0.5 p 01 p 02 p 12 p 0 p 2
44 Algoritmo de De Casteljau p 1 p 01 u = 0.75 p 02 p 12 p 0 p 2
45 Algoritmo de De Casteljau p 1 p 02 (u) p 0 p 2


46 Bézier Propriedade: Convex Hull Uma curva de Bézier está completamente dentro do maior polígono convexo, formado pelos pontos de controle.
47 Bézier Transformações Executar as transformações (S,R,T) na curva é equivalente a realizar as transformações nos pontos de controle.
48 Emendando Curvas Bézier Continuidade C 0 : Último ponto da primeira = primeiro ponto da segunda Continuidade C 1 : C 0 e segmento p 2 p 3 da primeira com mesma direção e comprimento que o segmento p 0 p 1 da segunda Continuidade C 2 : C 1 e + restrições sobre pontos p 1 da primeira e p 2 da segunda p 1 p 2 p 2 p 0 p 3 p 0 p 1 p 2
49 B-Spline Definida por quatro pontos de controle (P 1, P 2, P 3, P 4 ). Não passa por nenhum ponto de controle. Curva de aproximação Mais suave que as anteriores Mais fácil garantir continuidade paramétrica Controle local.
50 B-Spline Cada segmento é definido por 4 pontos, cada ponto influencia 4 segmentos de curva (exceto P0 e Pn) Knots são os pontos de junção entre os segmentos de curva 50
51 B-Spline Representação matricial
52 // use the parametric time value 0 to 1 for(int i=0;i!=lod;++i) { float Geometry[4][3] = { { 10,10,0 }, // Point1 {-10,5,-2 }, // Point2 { 5,-5,0 }, // Tangent1 { 5,10,0 } // Tangent2 }; unsigned int LOD=20; float t = (float)i/(lod-1); float it = 1.0f-t; // calculate blending functions float b0 = it*it*it/6.0f; float b1 = (3*t*t*t - 6*t*t +4)/6.0f; float b2 = (-3*t*t*t +3*t*t + 3*t + 1)/6.0f; float b3 = t*t*t/6.0f; // calculate the x,y and z of the curve point float x = b0*geometry[0][0] + b1*geometry[1][0] + b2*geometry[2][0] + b3*geometry[3][0] ; float y = b0*geometry[0][1] + b1*geometry[1][1] + b2*geometry[2][1] + b3*geometry[3][1] ; float z = b0*geometry[0][2] + b1*geometry[1][2] + b2*geometry[2][2] + b3*geometry[3][2] ; } // specify the point glvertex3f( x,y,z ); 52
53 Superfícies Paramétricas Ideia de multiplicação de 2 curvas A informação geométrica que define uma curva passa a ser ela própria uma função de uma variável paramétrica 53
54 Superfícies Paramétricas A forma geral de uma superfície 3D na sua representação paramétrica é: f ( u, v) ( f ( u, v), f ( u, v), f ( u, v)) x y z 54

55 Malhas de Polígonos Coleção de arestas, vértices e polígonos conectados Diferentes formas de armazenar a estrutura do polígono Vertex list + faces list Vertex list + edges list + faces list 55
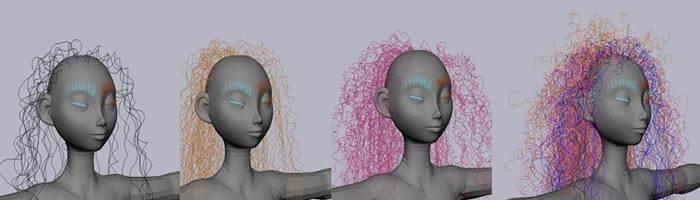
56 Animação de Cabelos 56



57 Animação de Cabelos Modelo 57

58 Mais exemplos 58
59 Brave (Disney) Desenvolveram um simulador chamado Taz. O cabelo foi modelado usando sistema Massamola. No entanto, os cachos são bem formados e deveriam ser rígidos, mas com movimento, sendo contraditório a resistência das molas. Deveriam voar ao vento, mas não muito. Além disto, tinham os problemas da intersecção e colisão que tornaram o projeto desafiador. O simulador trata grupo de cabelos usando multi-threads. Os cabelos-chave são B-splines que foram usadas para ihnterpolar o resto dos cabelos. Merida had 1500 hand placed curves which interpolate to some 111,000 curves at final render. Merida s hair was simulated at about 20 to 30 seconds a frame. 59


60 Brave (Disney)
61 Curvas e Superfícies Profª Soraia Raupp Musse
Curvas e Superfícies. Profª Soraia Raupp Musse
 Curvas e Superfícies Profª Soraia Raupp Musse Classificação Curvas Apenas comprimento 2 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3 Classificação Sólidos
Curvas e Superfícies Profª Soraia Raupp Musse Classificação Curvas Apenas comprimento 2 Classificação Superfícies Apenas área Cascas infinitesimalmente finas, ocas Abertas ou fechadas 3 Classificação Sólidos
Curvas e Superfícies Paramétricas
 Curvas e Superfícies Paramétricas Leandro Tonietto Computação Gráfica Jogos Digitais ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/cgr/curvas.pdf 5-12 Baseado nos slides do professor
Curvas e Superfícies Paramétricas Leandro Tonietto Computação Gráfica Jogos Digitais ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/cgr/curvas.pdf 5-12 Baseado nos slides do professor
Curvas e Superfícies
 Curvas e Superfícies Fontes: M.C.F. de Oliveira D.F. Rogers & J.A. Adams, Mathematical Elements for Computer Graphics, McGraw-Hill, 1999 Hearn & Baker, Cap. 8 (8-8 a 8-18) An Interactive Introduction to
Curvas e Superfícies Fontes: M.C.F. de Oliveira D.F. Rogers & J.A. Adams, Mathematical Elements for Computer Graphics, McGraw-Hill, 1999 Hearn & Baker, Cap. 8 (8-8 a 8-18) An Interactive Introduction to
Professor: Computação Gráfica I. Anselmo Montenegro Conteúdo: - Objetos gráficos planares. Instituto de Computação - UFF
 Computação Gráfica I Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Objetos gráficos planares 1 Objetos gráficos: conceitos O conceito de objeto gráfico é fundamental para a Computação
Computação Gráfica I Professor: Anselmo Montenegro www.ic.uff.br/~anselmo Conteúdo: - Objetos gráficos planares 1 Objetos gráficos: conceitos O conceito de objeto gráfico é fundamental para a Computação
Curvas e Superfícies
 Curvas e Superfícies Robson Carlos da Motta 1 Disciplina: Computação Gráfica Resumo. Neste documento são apresentados conceitos de curvas e superfícies. Mais especificamente serão detalhados conceitos
Curvas e Superfícies Robson Carlos da Motta 1 Disciplina: Computação Gráfica Resumo. Neste documento são apresentados conceitos de curvas e superfícies. Mais especificamente serão detalhados conceitos
Altamir Dias CURSO DE GRADUAÇÃO ENGENHARIA MECÂNICA ENGENHARIA DE CONTROLE E AUTOMAÇÃO
 Representação Matemática de Curvas Altamir Dias 1 DEPTO. DE ENGENHARIA MECÂNICA Universidade Federal de Santa Catarina CURSO DE GRADUAÇÃO ENGENHARIA MECÂNICA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 1 Representação
Representação Matemática de Curvas Altamir Dias 1 DEPTO. DE ENGENHARIA MECÂNICA Universidade Federal de Santa Catarina CURSO DE GRADUAÇÃO ENGENHARIA MECÂNICA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 1 Representação
Curvas HERMITE. Figura 1 - Efeito oscilatório dos polinômios: [PAVLIDIS, 1984]
![Curvas HERMITE. Figura 1 - Efeito oscilatório dos polinômios: [PAVLIDIS, 1984]](/thumbs/65/53753981.jpg "Curvas HERMITE. Figura 1 - Efeito oscilatório dos polinômios: [PAVLIDIS, 1984]") Curvas A representação de uma curva como uma sucessão de trecho retos pode ser suficiente para várias aplicações. No entanto, curvas e superfícies complexas normalmente demandam uma maneira mais eficiente
Curvas A representação de uma curva como uma sucessão de trecho retos pode ser suficiente para várias aplicações. No entanto, curvas e superfícies complexas normalmente demandam uma maneira mais eficiente
Departamento de Matemática
 Computação Gráfica - Evolução de Curvas e Superfícies Aluno: Vinícius Segura Orientador: Sinésio Pesco Introdução Nas últimas décadas atravessamos uma verdadeira revolução tecnológica, devido ao avanço
Computação Gráfica - Evolução de Curvas e Superfícies Aluno: Vinícius Segura Orientador: Sinésio Pesco Introdução Nas últimas décadas atravessamos uma verdadeira revolução tecnológica, devido ao avanço
Computação Gráfica. Representação e Modelagem
 Computação Gráfica Representação e Modelagem Professora: Sheila Cáceres Baseado nos slides da Prof. Soraia Musse Modelagem Área da Computação Gráfica que estuda a criação de modelos dos objetos reais.
Computação Gráfica Representação e Modelagem Professora: Sheila Cáceres Baseado nos slides da Prof. Soraia Musse Modelagem Área da Computação Gráfica que estuda a criação de modelos dos objetos reais.
Interpolação. Interpolação
 Interpolação Interpolação Princípio Alterar a posição espacial de um ponto de forma incremental Questões fundamentais Qual a função de interpolação mais adaptada para cada situação? Como parametrizar as
Interpolação Interpolação Princípio Alterar a posição espacial de um ponto de forma incremental Questões fundamentais Qual a função de interpolação mais adaptada para cada situação? Como parametrizar as
Objetos Gráficos Espaciais
 Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Espaciais Prof. Thales Vieira 2014 Objetos Gráficos Espaciais f : U R m 7! R 3 Universo físico Objetos gráficos Representação de
Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Espaciais Prof. Thales Vieira 2014 Objetos Gráficos Espaciais f : U R m 7! R 3 Universo físico Objetos gráficos Representação de
Transformações 3D. Soraia Raupp Musse
 Transformações 3D Soraia Raupp Musse 1 Transformações 3D Translação gltranslatef(dx, dy, dz) T(dx, dy, dz): 1 1 1 dz dy dx 2 Escala glscalef(sx, Sy, Sz) S(Sx, Sy, Sz): 1 1 Sz Sy Sx Transformações 3D Rotação
Transformações 3D Soraia Raupp Musse 1 Transformações 3D Translação gltranslatef(dx, dy, dz) T(dx, dy, dz): 1 1 1 dz dy dx 2 Escala glscalef(sx, Sy, Sz) S(Sx, Sy, Sz): 1 1 Sz Sy Sx Transformações 3D Rotação
Histórico. Estado da Arte. Histórico. Modelagem de Objetos. Modelagem por arames (wireframes). Modelagem por superfícies (década de 60).
. Modelagem por superfícies (década de 60).") Histórico Modelagem de Objetos Renato Ferreira Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre a sua superfície. Gera modelos ambíguos. Modelagem por superfícies (década
Histórico Modelagem de Objetos Renato Ferreira Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre a sua superfície. Gera modelos ambíguos. Modelagem por superfícies (década
Técnicas de Animação. Soraia Raupp Musse
 Técnicas de Animação Soraia Raupp Musse Aula passada: Classificação de técnicas Diferenças Low-level High-level Intervenção do usuário Nível de abstração Precisão do resultado em relação ao especificado
Técnicas de Animação Soraia Raupp Musse Aula passada: Classificação de técnicas Diferenças Low-level High-level Intervenção do usuário Nível de abstração Precisão do resultado em relação ao especificado
Introdução à Computação Gráfica Modelagem. Claudio Esperança Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Modelagem Claudio Esperança Paulo Roma Cavalcanti Histórico Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre a sua superfície. Gera modelos
Introdução à Computação Gráfica Modelagem Claudio Esperança Paulo Roma Cavalcanti Histórico Modelagem por arames (wireframes). Representa os objetos por arestas e pontos sobre a sua superfície. Gera modelos
Instituto de Computação Bacharelado em Ciência da Computação Disciplina: Computação Gráfica Primeira lista de exercícios
 Instituto de Computação Bacharelado em Ciência da Computação Disciplina: Computação Gráfica Primeira lista de exercícios - 2013.1 Conceitos fundamentais 1) A Computação Gráfica é dividida em diversas sub-áreas.
Instituto de Computação Bacharelado em Ciência da Computação Disciplina: Computação Gráfica Primeira lista de exercícios - 2013.1 Conceitos fundamentais 1) A Computação Gráfica é dividida em diversas sub-áreas.
14 AULA. Vetor Gradiente e as Derivadas Direcionais LIVRO
 1 LIVRO Vetor Gradiente e as Derivadas Direcionais 14 AULA META Definir o vetor gradiente de uma função de duas variáveis reais e interpretá-lo geometricamente. Além disso, estudaremos a derivada direcional
1 LIVRO Vetor Gradiente e as Derivadas Direcionais 14 AULA META Definir o vetor gradiente de uma função de duas variáveis reais e interpretá-lo geometricamente. Além disso, estudaremos a derivada direcional
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
REPRESENTAÇÃO DE ARCOS POR CURVAS DE BEZIER
 519 REPRESENTAÇÃO DE ARCOS POR CURVAS DE BEZER Jonas de Miranda Gomes nstituto de Matemática Pura e Aplicada (MPA) Est. D. Castorina, 11 O - Rio de Janeiro, RJ 1.0- ntrodução. Não é necessário ressaltar
519 REPRESENTAÇÃO DE ARCOS POR CURVAS DE BEZER Jonas de Miranda Gomes nstituto de Matemática Pura e Aplicada (MPA) Est. D. Castorina, 11 O - Rio de Janeiro, RJ 1.0- ntrodução. Não é necessário ressaltar
4 CURVAS PARAMÉTRICAS
 4 CURVAS PARAMÉTRICAS Neste capítulo vamos abordar o desenho de curvas com naturalidade e eficiência. Para isso veremos um pouco da história do desenvolvimento de métodos cálculo e plotagem de curvas e
4 CURVAS PARAMÉTRICAS Neste capítulo vamos abordar o desenho de curvas com naturalidade e eficiência. Para isso veremos um pouco da história do desenvolvimento de métodos cálculo e plotagem de curvas e
Cálculo a Várias Variáveis I - MAT Cronograma para P2: aulas teóricas (segundas e quartas)
") Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
Cálculo a Várias Variáveis I - MAT 116 0141 Cronograma para P: aulas teóricas (segundas e quartas) Aula 10 4 de março (segunda) Aula 11 6 de março (quarta) Referências: Cálculo Vol James Stewart Seções
MAT 105- Lista de Exercícios
 1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
1 MAT 105- Lista de Exercícios 1. Determine as áreas dos seguintes polígonos: a) triângulo de vértices (2,3), (5,7), (-3,4). Resp. 11,5 b) triângulo de vértices (0,4), (-8,0), (-1,-4). Resp. 30 c) quadrilátero
y (n) (x) = dn y dx n(x) y (0) (x) = y(x).
 (x) = dn y dx n(x) y (0) (x) = y(x).") Capítulo 1 Introdução 1.1 Definições Denotaremos por I R um intervalo aberto ou uma reunião de intervalos abertos e y : I R uma função que possua todas as suas derivadas, a menos que seja indicado o contrário.
Capítulo 1 Introdução 1.1 Definições Denotaremos por I R um intervalo aberto ou uma reunião de intervalos abertos e y : I R uma função que possua todas as suas derivadas, a menos que seja indicado o contrário.
Matéria das Aulas e Exercícios Recomendados Cálculo II- MAA
 Matéria das Aulas e Exercícios Recomendados Cálculo II- MAA Número da Aula Data da Aula 1 02/09 Sequências Numéricas, definição, exemplos, representação geométrica, convergência e divergência, propriedades,
Matéria das Aulas e Exercícios Recomendados Cálculo II- MAA Número da Aula Data da Aula 1 02/09 Sequências Numéricas, definição, exemplos, representação geométrica, convergência e divergência, propriedades,
UNIVERSIDADE ESTADUAL DE SANTA CRUZ UESC. 1 a Avaliação escrita de Cálculo IV Professor: Afonso Henriques Data: 10/04/2008
 1 a Avaliação escrita de Professor: Afonso Henriques Data: 10/04/008 1. Seja R a região do plano delimitada pelos gráficos de y = x, y = 3x 18 e y = 0. Se f é continua em R, exprima f ( x, y) da em termos
1 a Avaliação escrita de Professor: Afonso Henriques Data: 10/04/008 1. Seja R a região do plano delimitada pelos gráficos de y = x, y = 3x 18 e y = 0. Se f é continua em R, exprima f ( x, y) da em termos
MAT Lista de exercícios
 1 Curvas no R n 1. Esboce a imagem das seguintes curvas para t R a) γ(t) = (1, t) b) γ(t) = (t, cos(t)) c) γ(t) = (t, t ) d) γ(t) = (cos(t), sen(t), 2t) e) γ(t) = (t, 2t, 3t) f) γ(t) = ( 2 cos(t), 2sen(t))
1 Curvas no R n 1. Esboce a imagem das seguintes curvas para t R a) γ(t) = (1, t) b) γ(t) = (t, cos(t)) c) γ(t) = (t, t ) d) γ(t) = (cos(t), sen(t), 2t) e) γ(t) = (t, 2t, 3t) f) γ(t) = ( 2 cos(t), 2sen(t))
Superfícies (2) 1 Cilindro. Sadao Massago. 3 de novembro de Paramétrica. P curva. reta.
 1 Cilindro. Sadao Massago. 3 de novembro de Paramétrica. P curva. reta.") Superfícies (2) Sadao Massago 3 de novembro de 2009 http://www.dm.ufscar.br/~sadao DM-UFSCar 1 Cilindro Dado uma e uma reta, podemos obter família de retas passando no ponto da e sendo paralela a reta
Superfícies (2) Sadao Massago 3 de novembro de 2009 http://www.dm.ufscar.br/~sadao DM-UFSCar 1 Cilindro Dado uma e uma reta, podemos obter família de retas passando no ponto da e sendo paralela a reta
01. (UFRGS/2003) Se n é um número natural qualquer maior que 1, então n! + n 1 é divisível por. (A) n 1. (B) n. (C) n + 1. (D) n! - 1. (E) n!.
 Se n é um número natural qualquer maior que 1, então n! + n 1 é divisível por. (A) n 1. (B) n. (C) n + 1. (D) n! - 1. (E) n!.") 0. (UFRGS/00) Se n é um número natural qualquer maior que, então n! + n é divisível por n. n. n +. n! -. n!. 0. (UFRGS/00) Se num determinado período o dólar sofrer uma alta de 00% em relação ao real,
0. (UFRGS/00) Se n é um número natural qualquer maior que, então n! + n é divisível por n. n. n +. n! -. n!. 0. (UFRGS/00) Se num determinado período o dólar sofrer uma alta de 00% em relação ao real,
12 Qua 16 mar Coordenadas retangulares, representação Funções vetoriais paramétrica
 Aula Data Aula Detalhes 1 Qua 3 fev Introdução Apresentação e avisos 2 Sex 5 fev Revisão Resumo dos pré-requisitos Qua 10 fev Feriado Carnaval 3 Sex 12 fev Soma de Riemann Área, soma superior e inferior
Aula Data Aula Detalhes 1 Qua 3 fev Introdução Apresentação e avisos 2 Sex 5 fev Revisão Resumo dos pré-requisitos Qua 10 fev Feriado Carnaval 3 Sex 12 fev Soma de Riemann Área, soma superior e inferior
Modelo. Representação de Objetos Tridimensionais. Malhas Poligonais. Modelagem Geométrica. Modelos Geométricos
 Representação de Objetos Tridimensionais Malhas Poligonais Maria Cristina F. de Oliveira Rosane 2010 Modelo Representação construída artificialmente para tornar mais fácil a observação/análise de um objeto/fenômeno
Representação de Objetos Tridimensionais Malhas Poligonais Maria Cristina F. de Oliveira Rosane 2010 Modelo Representação construída artificialmente para tornar mais fácil a observação/análise de um objeto/fenômeno
2 - f: R R: y = x 2 Classicação: Nem injetora, nem sobrejetora.
 Apostila de Métodos Quantitativos - UERJ Professor: Pedro Hemsley Funções: f: X Y : Associa a cada elemento do conjunto X um único elemento do conjunto Y. Existem tres tipos especícos de funções: Sobrejetora,
Apostila de Métodos Quantitativos - UERJ Professor: Pedro Hemsley Funções: f: X Y : Associa a cada elemento do conjunto X um único elemento do conjunto Y. Existem tres tipos especícos de funções: Sobrejetora,
CÁLCULO FUNÇÕES DE UMA E VÁRIAS VARIÁVEIS Pedro A. Morettin, Samuel Hazzan, Wilton de O. Bussab.
 Introdução Função é uma forma de estabelecer uma ligação entre dois conjuntos, sujeita a algumas condições. Antes, porém, será exposta uma forma de correspondência mais geral, chamada relação. Sejam dois
Introdução Função é uma forma de estabelecer uma ligação entre dois conjuntos, sujeita a algumas condições. Antes, porém, será exposta uma forma de correspondência mais geral, chamada relação. Sejam dois
PARTE 10 REGRA DA CADEIA
 PARTE 10 REGRA DA CADEIA 10.1 Introdução Em Cálculo 1A, quando queríamos derivar a função h(x = (x 2 3x + 2 37, fazíamos uso da regra da cadeia, que é uma das mais importantes regras de derivação e nos
PARTE 10 REGRA DA CADEIA 10.1 Introdução Em Cálculo 1A, quando queríamos derivar a função h(x = (x 2 3x + 2 37, fazíamos uso da regra da cadeia, que é uma das mais importantes regras de derivação e nos
Modelagem Geométrica: Boundary Representation
 Modelagem Geométrica: Boundary Representation Prof. Dr. André Tavares da Silva Gabriel Caixeta Silva caixetasilva@hotmail.com Prof. Dr. Marcelo da Silva Hounsell PPGCA UDESC 2017/01 Introdução Modelagem
Modelagem Geométrica: Boundary Representation Prof. Dr. André Tavares da Silva Gabriel Caixeta Silva caixetasilva@hotmail.com Prof. Dr. Marcelo da Silva Hounsell PPGCA UDESC 2017/01 Introdução Modelagem
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
étodos uméricos ZEROS DE FUNÇÕES DE UMA OU MAIS VARIÁVEIS Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
 étodos uméricos ZEROS DE FUNÇÕES DE UMA OU MAIS VARIÁVEIS Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA DE PESQUISA CENTRO
étodos uméricos ZEROS DE FUNÇÕES DE UMA OU MAIS VARIÁVEIS Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA DE PESQUISA CENTRO
Fundamentos e Conceitos Básicos
 Mestrado em Engenharia Informática e de Computadores Processamento de Objectos 3D Fundamentos e Conceitos Básicos Representação de Objectos 3D 2011 Corpo docente de / CG&M / DEI / IST / UTL Sumário Representação
Mestrado em Engenharia Informática e de Computadores Processamento de Objectos 3D Fundamentos e Conceitos Básicos Representação de Objectos 3D 2011 Corpo docente de / CG&M / DEI / IST / UTL Sumário Representação
a) 6% b) 7% c) 70% d) 600% e) 700%
 6% b) 7% c) 70% d) 600% e) 700%") - MATEMÁTICA 01) Supondo-se que o número de vagas em um concurso vestibular aumentou 5% e que o número de candidatos aumentou 35%, o número de candidatos por vaga para esse curso aumentou: a) 8% b) 9%
- MATEMÁTICA 01) Supondo-se que o número de vagas em um concurso vestibular aumentou 5% e que o número de candidatos aumentou 35%, o número de candidatos por vaga para esse curso aumentou: a) 8% b) 9%
MOVIMENTO 3D: REFERENCIAL EM TRANSLAÇÃO
 MOVIMENTO 3D: REFERENCIAL EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço gira o braço para baixo e em
MOVIMENTO 3D: REFERENCIAL EM TRANSLAÇÃO INTRODUÇÃO ESTUDO DE CASO À medida que o caminhão da figura ao lado se retira da obra, o trabalhador na plataforma no topo do braço gira o braço para baixo e em
Equações não lineares
 DMPA IME UFRGS Cálculo Numérico Índice Raizes de polinômios 1 Raizes de polinômios 2 raizes de polinômios As equações não lineares constituídas por polinômios de grau n N com coeficientes complexos a n,a
DMPA IME UFRGS Cálculo Numérico Índice Raizes de polinômios 1 Raizes de polinômios 2 raizes de polinômios As equações não lineares constituídas por polinômios de grau n N com coeficientes complexos a n,a
4. Curvas Paramétricas e Transformações 2D
 4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
4. Curvas Paramétricas e Transformações 2D Curvas Paramétricas (fonte: Wikipédia) Em matemática, uma equação paramétrica é uma forma de representar uma curva (ou, em geral, uma superfície) como a imagem
6 AULA. Equações Paramétricas LIVRO. META Estudar funções que a cada ponto do domínio associa um par ordenado
 1 LIVRO Equações Paramétricas 6 AULA META Estudar funções que a cada ponto do domínio associa um par ordenado de R 2 OBJETIVOS Estudar movimentos de partículas no plano. PRÉ-REQUISITOS Ter compreendido
1 LIVRO Equações Paramétricas 6 AULA META Estudar funções que a cada ponto do domínio associa um par ordenado de R 2 OBJETIVOS Estudar movimentos de partículas no plano. PRÉ-REQUISITOS Ter compreendido
LISTA DE EXERCÍCIOS DE CAMPOS CONSERVATIVOS NO PLANO E NO ESPAÇO. CURVAS PARAMETRIZADAS, INTEGRAIS DE LINHA (COM RESPEITO A COMPRIMENTO DE ARCO).
.") LISTA DE EXERCÍCIOS DE CAMPOS CONSERVATIVOS NO PLANO E NO ESPAÇO. CURVAS PARAMETRIZADAS, INTEGRAIS DE LINHA (COM RESPEITO A COMPRIMENTO DE ARCO. PROFESSOR: RICARDO SÁ EARP OBS: Faça os exercícios sobre
LISTA DE EXERCÍCIOS DE CAMPOS CONSERVATIVOS NO PLANO E NO ESPAÇO. CURVAS PARAMETRIZADAS, INTEGRAIS DE LINHA (COM RESPEITO A COMPRIMENTO DE ARCO. PROFESSOR: RICARDO SÁ EARP OBS: Faça os exercícios sobre
Modelos de Objetos por Malhas Poligonais. Maria Cristina F. de Oliveira
 Modelos de Objetos por Malhas Poligonais Maria Cristina F. de Oliveira 2009 Modelo Representação construída artificialmente para tornar mais fácil a observação/análise de um objeto/fenômeno Nível de detalhe
Modelos de Objetos por Malhas Poligonais Maria Cristina F. de Oliveira 2009 Modelo Representação construída artificialmente para tornar mais fácil a observação/análise de um objeto/fenômeno Nível de detalhe
2 Uma caixa d'água cúbica, de volume máximo, deve ser colocada entre o telhado e a laje de uma casa, conforme mostra a figura ao lado.
 MATEMÁTICA Uma pessoa possui a quantia de R$7.560,00 para comprar um terreno, cujo preço é de R$5,00 por metro quadrado. Considerando que os custos para obter a documentação do imóvel oneram o comprador
MATEMÁTICA Uma pessoa possui a quantia de R$7.560,00 para comprar um terreno, cujo preço é de R$5,00 por metro quadrado. Considerando que os custos para obter a documentação do imóvel oneram o comprador
2.1. Construção da Pista
 2 Malha de Controle Para que se possa controlar um dado sistema é necessário observar e medir suas variáveis de saída para determinar o sinal de controle, que deve ser aplicado ao sistema a cada instante.
2 Malha de Controle Para que se possa controlar um dado sistema é necessário observar e medir suas variáveis de saída para determinar o sinal de controle, que deve ser aplicado ao sistema a cada instante.
Modelação de Formas Geométricas
 Modelação de Formas Geométricas Computação Gráfica Inverno 2012/2013 Parcialmente adaptado de Hanspeter Pfister, Harvard / MERL Carlos Guedes @ 2012 ISEL/ADEETC Computação Gráfica 1 2 http://hof.povray.org/images/villarceau_circles-csg.jpg
Modelação de Formas Geométricas Computação Gráfica Inverno 2012/2013 Parcialmente adaptado de Hanspeter Pfister, Harvard / MERL Carlos Guedes @ 2012 ISEL/ADEETC Computação Gráfica 1 2 http://hof.povray.org/images/villarceau_circles-csg.jpg
REPRESENTAÇÃO NUMÉRICA DO TERRENO
 RERESENTAÇÃO NUÉRICA DO TERRENO GEOÁTICA - 16ª aula odelo vectorial TIN - Triangulated Irregular Network Representação planimétrica de pontos do terreno com coordenadas, e H 16,1 14,1 11,5 H erspectiva
RERESENTAÇÃO NUÉRICA DO TERRENO GEOÁTICA - 16ª aula odelo vectorial TIN - Triangulated Irregular Network Representação planimétrica de pontos do terreno com coordenadas, e H 16,1 14,1 11,5 H erspectiva
Universidade Federal de Alagoas Instituto de Matemática. Geometria. Prof. Thales Vieira
 Universidade Federal de Alagoas Instituto de Matemática Geometria Prof. Thales Vieira 2014 Geometria Euclidiana Espaço R n R n = {(x 1,...,x n ); x i 2 R} Operações entre elementos de R n Soma: (x 1,x
Universidade Federal de Alagoas Instituto de Matemática Geometria Prof. Thales Vieira 2014 Geometria Euclidiana Espaço R n R n = {(x 1,...,x n ); x i 2 R} Operações entre elementos de R n Soma: (x 1,x
Aula 31 Funções vetoriais de uma variável real
 MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
MÓDULO 3 - AULA 31 Aula 31 Funções vetoriais de uma variável real Objetivos Conhecer as definições básicas de funções vetoriais de uma variável real. Aprender a parametrizar curvas simples. Introdução
UNIVERSIDADE FEDERAL DE ITAJUBÁ Pró-Reitoria de Graduação - PRG Coordenação de Processos Seletivos COPS
 UNIVERSIDADE FEDERAL DE ITAJUBÁ Pró-Reitoria de Graduação - PRG Coordenação de Processos Seletivos COPS PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR 28/06/2015 Física
UNIVERSIDADE FEDERAL DE ITAJUBÁ Pró-Reitoria de Graduação - PRG Coordenação de Processos Seletivos COPS PROVA DE TRANSFERÊNCIA INTERNA, EXTERNA E PARA PORTADOR DE DIPLOMA DE CURSO SUPERIOR 28/06/2015 Física
1. Determine o valor do integral curvilíneo do campo F (x, y, z) = xzî + xĵ + y k ao longo da linha (L), definida por: { x 2 /4 + y 2 /25 = 1 z = 2
 = xzî + xĵ + y k ao longo da linha (L), definida por: { x 2 /4 + y 2 /25 = 1 z = 2") Análise Matemática IIC Ficha 6 - Integrais Curvilíneos de campos de vectores. Teorema de Green. Integrais de Superfície. Teorema de Stokes. Teorema da Divergência. 1. Determine o valor do integral curvilíneo
Análise Matemática IIC Ficha 6 - Integrais Curvilíneos de campos de vectores. Teorema de Green. Integrais de Superfície. Teorema de Stokes. Teorema da Divergência. 1. Determine o valor do integral curvilíneo
Comprimento de Arco. 1.Introdução 2.Resolução de Exemplos 3.Função Comprimento de Arco 4.Resolução de Exemplo
 UNIVERSIDADE DO ESTADO DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE ENGENHARIA CIVIL DISCIPLINA: CÁLCULO DIFERENCIAL E INTEGRAL I Comprimento de Arco
UNIVERSIDADE DO ESTADO DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE ENGENHARIA CIVIL DISCIPLINA: CÁLCULO DIFERENCIAL E INTEGRAL I Comprimento de Arco
E. S. JERÓNIMO EMILIANO DE ANDRADE DE ANGRA DO HEROISMO. Conteúdo Programáticos / Matemática e a Realidade. Curso de Nível III Técnico de Laboratório
 E. S. JERÓNIMO EMILIANO DE ANDRADE DE ANGRA DO HEROISMO Curso de Nível III Técnico de Laboratório Técnico Administrativo PROFIJ Conteúdo Programáticos / Matemática e a Realidade 2º Ano Ano Lectivo de 2008/2009
E. S. JERÓNIMO EMILIANO DE ANDRADE DE ANGRA DO HEROISMO Curso de Nível III Técnico de Laboratório Técnico Administrativo PROFIJ Conteúdo Programáticos / Matemática e a Realidade 2º Ano Ano Lectivo de 2008/2009
1. as equações paramétricas da reta que contém os pontos A e B;
 ROVA 1 08 de abril de 2015 08h30 1 2 3 4 5 081 0811 Considere os pontos A = (2, 3, 5), B = (7, 1, 0) e C = (1, 3, 2) do espaço. 1. as equações paramétricas da reta que contém os pontos A e B; 2. a equação
ROVA 1 08 de abril de 2015 08h30 1 2 3 4 5 081 0811 Considere os pontos A = (2, 3, 5), B = (7, 1, 0) e C = (1, 3, 2) do espaço. 1. as equações paramétricas da reta que contém os pontos A e B; 2. a equação
Primeiro Projeto de PG: Lista de Temas Selecionados
 Primeiro Projeto de PG: Lista de Temas Selecionados Observações O sistema não pode apresentar estouro de memória, ou excessiva lentidão na execução. Haverá desconto na nota para este caso. Nenhum dos projetos
Primeiro Projeto de PG: Lista de Temas Selecionados Observações O sistema não pode apresentar estouro de memória, ou excessiva lentidão na execução. Haverá desconto na nota para este caso. Nenhum dos projetos
COMPUTAÇÃO GRÁFICA E INTERFACES
 Nome completo Número COMPUTÇÃO GRÁFIC E INTERFCES LEI/FCT/UNL no Lectivo 2007/08 EXME da ÉPOC de RECURSO 08/02/08 tenção: Responda no próprio enunciado, que entregará. Em caso de engano, e se o espaço
Nome completo Número COMPUTÇÃO GRÁFIC E INTERFCES LEI/FCT/UNL no Lectivo 2007/08 EXME da ÉPOC de RECURSO 08/02/08 tenção: Responda no próprio enunciado, que entregará. Em caso de engano, e se o espaço
Algoritmos geométricos
 Algoritmos geométricos introdução a conceitos básicos de geometria computacional que serão abordados de forma mais avançada na disciplina Computação Gráfica disciplina de computação gráfica arquitetura
Algoritmos geométricos introdução a conceitos básicos de geometria computacional que serão abordados de forma mais avançada na disciplina Computação Gráfica disciplina de computação gráfica arquitetura
MÉTODOS NUMÉRICOS. ENGENHARIA ELECTRÓNICA INDUSTRIAL e de COMPUTADORES
 UNIVERSIDADE DO MINHO MÉTODOS NUMÉRICOS ENGENHARIA ELECTRÓNICA INDUSTRIAL e de COMPUTADORES EXERCÍCIOS PRÁTICOS- 1 a parte Ano lectivo de 2004/2005 Exercícios práticos - CONUM Solução de uma equação não
UNIVERSIDADE DO MINHO MÉTODOS NUMÉRICOS ENGENHARIA ELECTRÓNICA INDUSTRIAL e de COMPUTADORES EXERCÍCIOS PRÁTICOS- 1 a parte Ano lectivo de 2004/2005 Exercícios práticos - CONUM Solução de uma equação não
Funções de duas (ou mais)
") Lista 5 - CDI II Funções de duas (ou mais) variáveis. Seja f(x, y) = x+y x y, calcular: f( 3, 4) f( 2, 3 ) f(x +, y ) f( x, y) f(x, y) 2. Seja g(x, y) = x 2 y, obter: g(3, 5) g( 4, 9) g(x + 2, 4x + 4)
Lista 5 - CDI II Funções de duas (ou mais) variáveis. Seja f(x, y) = x+y x y, calcular: f( 3, 4) f( 2, 3 ) f(x +, y ) f( x, y) f(x, y) 2. Seja g(x, y) = x 2 y, obter: g(3, 5) g( 4, 9) g(x + 2, 4x + 4)
Derivada de ordem n. Equação da recta tangente e da recta normal. Polinómio de Taylor
 Equação da recta tangente e da recta normal Como já vimos este ano a equação de uma recta na forma reduzida édadapor y y 0 = m(x x 0 ) Também sabemos que o declive da recta tangente ao gráfico de f no
Equação da recta tangente e da recta normal Como já vimos este ano a equação de uma recta na forma reduzida édadapor y y 0 = m(x x 0 ) Também sabemos que o declive da recta tangente ao gráfico de f no
CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1. CAPÍTULO 2 Sistemas de Coordenadas Retangulares 9. CAPÍTULO 3 Retas 18
 Sumário CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1 Sistema de Coordenadas Lineares 1 Intervalos Finitos 3 Intervalos Infinitos 3 Desigualdades 3 CAPÍTULO 2 Sistemas de
Sumário CAPÍTULO 1 Sistemas de Coordenadas Lineares. Valor Absoluto. Desigualdades 1 Sistema de Coordenadas Lineares 1 Intervalos Finitos 3 Intervalos Infinitos 3 Desigualdades 3 CAPÍTULO 2 Sistemas de
3.6 Erro de truncamento da interp. polinomial.
 3 Interpolação 31 Polinômios interpoladores 32 Polinômios de Lagrange 33 Polinômios de Newton 34 Polinômios de Gregory-Newton 35 Escolha dos pontos para interpolação 36 Erro de truncamento da interp polinomial
3 Interpolação 31 Polinômios interpoladores 32 Polinômios de Lagrange 33 Polinômios de Newton 34 Polinômios de Gregory-Newton 35 Escolha dos pontos para interpolação 36 Erro de truncamento da interp polinomial
Imagem Vetorial x Imagem Matricial. Conversão Matricial de Primitivas Gráficas. Sistema de Coordenadas do Dispositivo. Problema
 Conversão Matricial de Primitivas Gráficas Imagem Vetorial x Imagem Matricial Maria Cristina F. de Oliveira março 2009 2 Problema Traçar primitivas geométricas (segmentos de reta, polígonos, circunferências,
Conversão Matricial de Primitivas Gráficas Imagem Vetorial x Imagem Matricial Maria Cristina F. de Oliveira março 2009 2 Problema Traçar primitivas geométricas (segmentos de reta, polígonos, circunferências,
1 Para expressar um ponto intermediário em função dos pontos extremos, precisamos
 Resolução da Primeira Lista de Exercícios de Fundamentos de Computação Gráfica INF01047 Carlos Eduardo Ramisch Cartão 134657 Turma B Prof.ª Luciana Porcher Nedel Porto Alegre, 03 de abril de 2006. 1 Para
Resolução da Primeira Lista de Exercícios de Fundamentos de Computação Gráfica INF01047 Carlos Eduardo Ramisch Cartão 134657 Turma B Prof.ª Luciana Porcher Nedel Porto Alegre, 03 de abril de 2006. 1 Para
AGRUPAMENTO DE ESCOLAS
 AGRUPAMENTO DE ESCOLAS De CASTRO DAIRE Escola Secundária de Castro Daire Grupo de Recrutamento 00 MATEMÁTICA Ano letivo 202/203 Planificação Anual Disciplina: Matemática A Ano: 0º Carga horária semanal:
AGRUPAMENTO DE ESCOLAS De CASTRO DAIRE Escola Secundária de Castro Daire Grupo de Recrutamento 00 MATEMÁTICA Ano letivo 202/203 Planificação Anual Disciplina: Matemática A Ano: 0º Carga horária semanal:
Derivadas Parciais Capítulo 14
 Derivadas Parciais Capítulo 14 DERIVADAS PARCIAIS 14.6 Derivadas Direcionais e o Vetor Gradiente Nesta seção, vamos aprender como encontrar: As taxas de variação de uma função de duas ou mais variáveis
Derivadas Parciais Capítulo 14 DERIVADAS PARCIAIS 14.6 Derivadas Direcionais e o Vetor Gradiente Nesta seção, vamos aprender como encontrar: As taxas de variação de uma função de duas ou mais variáveis
Equações paramétricas das cônicas
 Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Aula 1 Equações paramétricas das cônicas Ao estudarmos as retas no plano, vimos que a reta r que passa por dois pontos distintos P 1 = x 1, y 1 ) e P = x, y ) é dada pelas seguintes equações paramétricas:
Cap. 4- Interpolação Numérica Definições. Censos de BH. Qual o número de habitantes na cidade de Belo Horizonte em 1975?
 Cap. 4- Interpolação Numérica 4.1. Definições Censos de BH População em BH (Habitantes,5,,, 1,5, 1,, 5, 194 196 198 Ano Ano 195 196 197 198 1991 1996 1 No. habitantes 5.74 68.98 1.5. 1.78.855..161.91.71.8.56.75.444
Cap. 4- Interpolação Numérica 4.1. Definições Censos de BH População em BH (Habitantes,5,,, 1,5, 1,, 5, 194 196 198 Ano Ano 195 196 197 198 1991 1996 1 No. habitantes 5.74 68.98 1.5. 1.78.855..161.91.71.8.56.75.444
étodos uméricos INTERPOLAÇÃO, EXTRAPOLAÇÃO, APROXIMAÇÃO E AJUSTE DE FUNÇÕES Prof. Erivelton Geraldo Nepomuceno
 étodos uméricos INTERPOLAÇÃO, EXTRAPOLAÇÃO, APROXIMAÇÃO E AJUSTE DE FUNÇÕES Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA
étodos uméricos INTERPOLAÇÃO, EXTRAPOLAÇÃO, APROXIMAÇÃO E AJUSTE DE FUNÇÕES Prof. Erivelton Geraldo Nepomuceno PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA UNIVERSIDADE DE JOÃO DEL-REI PRÓ-REITORIA
x exp( t 2 )dt f(x) =
dt f(x) =") INTERPOLAÇÃO POLINOMIAL 1 As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia e não têm a intenção de substituir o livro-texto, nem qualquer outra bibliografia Aproximação
INTERPOLAÇÃO POLINOMIAL 1 As notas de aula que se seguem são uma compilação dos textos relacionados na bibliografia e não têm a intenção de substituir o livro-texto, nem qualquer outra bibliografia Aproximação
As Primitivas de f'(x) são o conjunto: { f(x): f(x)=2x + K, K real }= {..2x + 1.., 2x + 1/2,..2x + 0..,2x + 1/3,..2x }
 são o conjunto: { f(x): f(x)=2x + K, K real }= {..2x + 1.., 2x + 1/2,..2x + 0..,2x + 1/3,..2x }") 1 of 6 27/11/2006 00:48 Derivada Origem: Wikipédia, a enciclopédia livre. Na matemática, a derivada de uma função é o conceito central do cálculo diferencial. A derivada pode ser usada para determinar
1 of 6 27/11/2006 00:48 Derivada Origem: Wikipédia, a enciclopédia livre. Na matemática, a derivada de uma função é o conceito central do cálculo diferencial. A derivada pode ser usada para determinar
Vetor Tangente, Normal e Binormal. T(t) = r (t)
 = r (t)") CVE 0003 - - CÁLCULO VETORIAL - - 2011/2 Vetor Tangente, Normal e Binormal Lembre-se que se C é uma curva suave dada pela função vetorial r(t), então r (t) é contínua e r (t) 0. Além disso, o vetor r (t)
CVE 0003 - - CÁLCULO VETORIAL - - 2011/2 Vetor Tangente, Normal e Binormal Lembre-se que se C é uma curva suave dada pela função vetorial r(t), então r (t) é contínua e r (t) 0. Além disso, o vetor r (t)
CCI-22 LISTA DE EXERCÍCIOS
 CCI-22 LISTA DE EXERCÍCIOS Capítulos 1 e 2: 1) Considere floats com 4 dígitos decimais de mantissa e expoentes inteiros entre -5 e 5. Sejam X =,7237.1 4, Y =,2145.1-3, Z =,2585.1 1. Utilizando um acumulador
CCI-22 LISTA DE EXERCÍCIOS Capítulos 1 e 2: 1) Considere floats com 4 dígitos decimais de mantissa e expoentes inteiros entre -5 e 5. Sejam X =,7237.1 4, Y =,2145.1-3, Z =,2585.1 1. Utilizando um acumulador
Características Principais. Introdução à Computação Gráfica Ray Tracing. Ray Casting. Contexto Histórico. Claudio Esperança Paulo Roma Cavalcanti
 Características Principais Introdução à Computação Gráfica Ray Tracing Claudio Esperança Paulo Roma Cavalcanti Tipicamente implementado em Software Combina um modelo de iluminação com determinação de visibilidade
Características Principais Introdução à Computação Gráfica Ray Tracing Claudio Esperança Paulo Roma Cavalcanti Tipicamente implementado em Software Combina um modelo de iluminação com determinação de visibilidade
Lista de Exercícios de Cálculo 3 Terceira Semana
 Lista de Exercícios de Cálculo 3 Terceira Semana Parte A 1. Reparametrize as curvas pelo parâmetro comprimento de arco medido a partir do ponto t = 0 na direção crescente de t. (a) r(t) = ti + (1 3t)j
Lista de Exercícios de Cálculo 3 Terceira Semana Parte A 1. Reparametrize as curvas pelo parâmetro comprimento de arco medido a partir do ponto t = 0 na direção crescente de t. (a) r(t) = ti + (1 3t)j
2.1 Mudança de variáveis em integral dupla
 ! "! # $! % & #! ' ( $ Objetivos. Os objetivos desta Aula são: apresentar a ideia de mudança de variáveis no plano para calcular integrais duplas; usar as coordenadas polares para calcular a integral dupla
! "! # $! % & #! ' ( $ Objetivos. Os objetivos desta Aula são: apresentar a ideia de mudança de variáveis no plano para calcular integrais duplas; usar as coordenadas polares para calcular a integral dupla
SCE-201 Computação Gráfica. Representação de Objetos Tridimensionais Modelos Poligonais
 INSTITUTO DE CIÊNCIAS MATEMÁTICAS DE SÃO CARLOS DEPARTAMENTO DE CIÊNCIAS DE COMPUTAÇÃO E ESTATÍSTICA SCE-201 Computação Gráfica Representação de Objetos Tridimensionais Modelos Poligonais Cenas gráficas
INSTITUTO DE CIÊNCIAS MATEMÁTICAS DE SÃO CARLOS DEPARTAMENTO DE CIÊNCIAS DE COMPUTAÇÃO E ESTATÍSTICA SCE-201 Computação Gráfica Representação de Objetos Tridimensionais Modelos Poligonais Cenas gráficas
II. Funções de uma única variável
 II. Funções de uma única variável 1 II.1. Conceitos básicos A otimização de de funções de de uma única variável consiste no no tipo mais elementar de de otimização. Importância: Tipo de problema encontrado
II. Funções de uma única variável 1 II.1. Conceitos básicos A otimização de de funções de de uma única variável consiste no no tipo mais elementar de de otimização. Importância: Tipo de problema encontrado
Computação Gráfica Rasterização de Curvas
 Computação Gráfica Rasterização de Curvas Professora Sheila Cáceres Podemos representar uma curva por aproximação a uma polilinea. Para isso, precisamos localizar alguns pontos no caminho da curva e conectar
Computação Gráfica Rasterização de Curvas Professora Sheila Cáceres Podemos representar uma curva por aproximação a uma polilinea. Para isso, precisamos localizar alguns pontos no caminho da curva e conectar
2 Conceitos Básicos da Geometria Diferencial Afim
 2 Conceitos Básicos da Geometria Diferencial Afim Antes de iniciarmos o estudo das desigualdades isoperimétricas para curvas convexas, vamos rever alguns conceitos e resultados da Geometria Diferencial
2 Conceitos Básicos da Geometria Diferencial Afim Antes de iniciarmos o estudo das desigualdades isoperimétricas para curvas convexas, vamos rever alguns conceitos e resultados da Geometria Diferencial
Rotações em 3D. Descrição dos problemas. Como mover entre 2 frames. Ângulos de Euler. Foley Notas do Dave (lecture 29)
") Descrição dos problemas Rotações em 3D Foley 21.1.3 Notas do Dave (lecture 29) 1- Como parametrizar rotações 3D? em animações, para criar um movimento suave. translações e rotacões 2D são simples, mas
Descrição dos problemas Rotações em 3D Foley 21.1.3 Notas do Dave (lecture 29) 1- Como parametrizar rotações 3D? em animações, para criar um movimento suave. translações e rotacões 2D são simples, mas
Esta opção é utilizada para desenhar círculos, arcos, elipses, e outros grupos curvilíneos.
 Curvas Esta opção é utilizada para desenhar círculos, arcos, elipses, e outros grupos curvilíneos. Curvas são desenhados normalmente no sentido contra-o-relógio, a menos que o interruptor [Horário] esteja
Curvas Esta opção é utilizada para desenhar círculos, arcos, elipses, e outros grupos curvilíneos. Curvas são desenhados normalmente no sentido contra-o-relógio, a menos que o interruptor [Horário] esteja
Cálculo Diferencial e Integral 2: Aproximações Lineares. Regra da Cadeia.
 Aproximações lineares. Diferenciais. Cálculo Diferencial e Integral 2: Aproximações Lineares.. Jorge M. V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 Aproximações
Aproximações lineares. Diferenciais. Cálculo Diferencial e Integral 2: Aproximações Lineares.. Jorge M. V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 Aproximações
Escola Secundária de Santa Maria da Feira
 Escola Secundária de Santa Maria da Feira Ficha de Trabalho de Matemática A 11º Ano FT-1 I Parte Escolha Múltipla 1. Quantas soluções tem a equação cos α = tg α no intervalo [0,π ]? (A) 0 (B) 1 (C) (D)
Escola Secundária de Santa Maria da Feira Ficha de Trabalho de Matemática A 11º Ano FT-1 I Parte Escolha Múltipla 1. Quantas soluções tem a equação cos α = tg α no intervalo [0,π ]? (A) 0 (B) 1 (C) (D)
Aula 2: Funções. Margarete Oliveira Domingues PGMET/INPE. Aula 2 p.1/57
 Aula 2 p.1/57 Aula 2: Funções. Margarete Oliveira Domingues PGMET/INPE Definição e representação Aula 2 p.2/57 Aula 2 p.3/57 Função Definição: Uma função de um conjunto em um conjunto, é uma correspondência
Aula 2 p.1/57 Aula 2: Funções. Margarete Oliveira Domingues PGMET/INPE Definição e representação Aula 2 p.2/57 Aula 2 p.3/57 Função Definição: Uma função de um conjunto em um conjunto, é uma correspondência
MÉTODOS MATEMÁTICOS. Claudia Mazza Dias Sandra Mara C. Malta
 MÉTODOS MATEMÁTICOS Claudia Mazza Dias Sandra Mara C. Malta 1 Métodos Matemáticos Aulas: De 03/11 a 08/11-8:30 as 11:00h Ementa: 1. Funções 2. Eq. Diferenciais Ordinárias de 1 a ordem 3. Sistemas de Equações
MÉTODOS MATEMÁTICOS Claudia Mazza Dias Sandra Mara C. Malta 1 Métodos Matemáticos Aulas: De 03/11 a 08/11-8:30 as 11:00h Ementa: 1. Funções 2. Eq. Diferenciais Ordinárias de 1 a ordem 3. Sistemas de Equações
Geometria Descritiva 28/08/2012. Elementos Primitivos da Geometria
 Geometria Descritiva Prof. Luiz Antonio do Nascimento ladnascimento@gmail.com www.lnascimento.com.br A Geometria, como qualquer outra ciência, fundamenta-se em observações e experiências para estabelecer
Geometria Descritiva Prof. Luiz Antonio do Nascimento ladnascimento@gmail.com www.lnascimento.com.br A Geometria, como qualquer outra ciência, fundamenta-se em observações e experiências para estabelecer
Prof. MSc. David Roza José 1/27
 1/27 Splines e Interpolação por Partes - A Objetivos: Compreender que splines minimizam oscilações ao ajustar polinômios de menor ordem a partições do domínio; Aprender a desenvolver um código para procurar
1/27 Splines e Interpolação por Partes - A Objetivos: Compreender que splines minimizam oscilações ao ajustar polinômios de menor ordem a partições do domínio; Aprender a desenvolver um código para procurar
Geometria Analítica. Geometria Analítica 28/08/2012
 Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Prof. Luiz Antonio do Nascimento luiz.anascimento@sp.senac.br www.lnascimento.com.br Conjuntos Propriedades das operações de adição e multiplicação: Propriedade comutativa: Adição a + b = b + a Multiplicação
Coordenadas Polares. Exemplos: Representar em um sistema de coordenadas polares, os seguintes pontos: d) P 4,
 P 4,") Cálculo II Profa. Adriana Cherri 1 Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano,
Cálculo II Profa. Adriana Cherri 1 Coordenadas Polares Existem vários sistemas de coordenadas que mostram a posição de um ponto em um plano. O sistema de coordenadas polares é um deles. No sistema cartesiano,
UNIVERSIDADE FEDERAL DE PERNAMBUCO
 CÁLCULO L1 NOTAS DA TERCEIRA AULA UNIVERSIDADE FEDERAL DE PERNAMBUCO Resumo. Nesta aula introduziremos o conceito de derivada e a definição de uma reta tangente ao gráfico de uma função. Também apresentaremos
CÁLCULO L1 NOTAS DA TERCEIRA AULA UNIVERSIDADE FEDERAL DE PERNAMBUCO Resumo. Nesta aula introduziremos o conceito de derivada e a definição de uma reta tangente ao gráfico de uma função. Também apresentaremos
Robótica. Linguagens de Programação para Robótica (manipuladores)
") Linguagens de Programação para (manipuladores) -Orientados para o Robô -Tarefa descrita como sequência de movimentos -Ex: VAL (Puma), AL (IBM) -Orientada para as Tarefas (ou para os Objectos) -Descrição
Linguagens de Programação para (manipuladores) -Orientados para o Robô -Tarefa descrita como sequência de movimentos -Ex: VAL (Puma), AL (IBM) -Orientada para as Tarefas (ou para os Objectos) -Descrição
MATEMÁTICA UFRGS 2008
 NESTA PROVA SERÃO UTILIZADOS OS SEGUINTES SíMBOLOS E CONCEITOS COM OS RESPECTIVOS SIGNIFICADOS: log x : Ioga ritmo de x na base 10 Re(z) : eixo real do plano complexo Im(z) : eixo imaginário do plano complexo
NESTA PROVA SERÃO UTILIZADOS OS SEGUINTES SíMBOLOS E CONCEITOS COM OS RESPECTIVOS SIGNIFICADOS: log x : Ioga ritmo de x na base 10 Re(z) : eixo real do plano complexo Im(z) : eixo imaginário do plano complexo
P2 de Cálculo a Várias Variáveis I MAT Data: 14 de maio de 2013
 P2 de Cálculo a Várias Variáveis I MAT 62 20. Data: 4 de maio de 20 Nome: Assinatura: Matrícula: Turma: Questão Valor Nota Revisão.0 2 5.0 Teste 2.0 Total 0.0 Instruções Mantenha seu celular desligado
P2 de Cálculo a Várias Variáveis I MAT 62 20. Data: 4 de maio de 20 Nome: Assinatura: Matrícula: Turma: Questão Valor Nota Revisão.0 2 5.0 Teste 2.0 Total 0.0 Instruções Mantenha seu celular desligado
CANDIDATO: DATA: 20 / 01 / 2010
 UNIVERSIDADE ESTADUAL DO CEARÁ - UECE SECRETARIA DE EDUCAÇÃO A DISTÂNCIA - SEaD Universidade Aberta do Brasil UAB LICENCIATURA PLENA EM MATEMÁTICA SELEÇÃO DE TUTORES PRESENCIAIS CANDIDATO: DATA: 0 / 0
UNIVERSIDADE ESTADUAL DO CEARÁ - UECE SECRETARIA DE EDUCAÇÃO A DISTÂNCIA - SEaD Universidade Aberta do Brasil UAB LICENCIATURA PLENA EM MATEMÁTICA SELEÇÃO DE TUTORES PRESENCIAIS CANDIDATO: DATA: 0 / 0
Universidade Federal do Paraná
 Universidade Federal do Paraná Setor de Ciências Exatas Departamento de Matematica Prof. Juan Carlos Vila Bravo Curitiba, 1 de Dezembro de 005 1. A posição de uma particula é dada por: r(t) = (sen t)i+(cost)j
Universidade Federal do Paraná Setor de Ciências Exatas Departamento de Matematica Prof. Juan Carlos Vila Bravo Curitiba, 1 de Dezembro de 005 1. A posição de uma particula é dada por: r(t) = (sen t)i+(cost)j
Geometria Diferencial
 Geometria Diferencial Exercícios sobre curvas planas e espaciais - 2007 Versão compilada no dia 20 de Setembro de 2007. Departamento de Matemática - UEL Prof. Ulysses Sodré: ulysses(a)uel(pt)br Matemática
Geometria Diferencial Exercícios sobre curvas planas e espaciais - 2007 Versão compilada no dia 20 de Setembro de 2007. Departamento de Matemática - UEL Prof. Ulysses Sodré: ulysses(a)uel(pt)br Matemática
Ordenar ou identificar a localização de números racionais na reta numérica.
 Ordenar ou identificar a localização de números racionais na reta numérica. Estabelecer relações entre representações fracionárias e decimais dos números racionais. Resolver situação-problema utilizando
Ordenar ou identificar a localização de números racionais na reta numérica. Estabelecer relações entre representações fracionárias e decimais dos números racionais. Resolver situação-problema utilizando