PROTÓTIPOS DA LINHA LEGO MINDSTORMS PARA AUXÍLIO NO ENSINO/APRENDIZAGEM PROGRAMAÇÃO
|
|
|
- Samuel de Abreu da Silva
- 8 Há anos
- Visualizações:
Transcrição
1 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE CAMPUS CURRAIS NOVOS UTILIZAÇÃO DE PROTÓTIPOS DA LINHA LEGO MINDSTORMS PARA AUXÍLIO NO ENSINO/APRENDIZAGEM DA DISCIPLINA DE PROGRAMAÇÃO ALUNOS: ORIENTADOR: ANDERSON MATHEUS MARIA LUIZA MORAIS MACEDO DA ROCHA ÉBERTON DA SILVA MARINHO

2 Robô Éum dispositivo, ou grupo de dispositivos, eletromecânicos capazes de realizar trabalhos de maneira autônoma, pré programada, programada, ou através de controle humano; Podem ser utilizados nas mais diversas áreas de automação de processos, bem como na área pedagógica, dando assistência aos alunos no aprendizado (Robótica Educacional).

3 Robótica Educacional A robótica educacional é caracterizada por ambientes de aprendizagem onde o aluno pode montar e programar um robô ou sistema robotizado.

4 Incentivo Disciplinas relacionadas ao desenvolvimento de algoritmos e construção de programas, geralmente tornam se um desafio para os iniciantes.

5 Objetivos Facilitar o ensino/aprendizagem da disciplina de programação, a partir da visualização, por parte dos alunos, da teoria na prática; Despertar o interesse dos alunos para a área tecnológica, especificamente relacionada com a programação e robótica.

6 Lego Mindstorms NXT O produto Lego Mindstorms NXT surgiu de uma associação entre a empresa Lego e o MIT (Media Laboratory); O produto possui tijolos, placas, rodas, motores, correntes, entreoutros outros, destinadosa a montagem do robô.

7

8

9 Lego Mindstorms NXT Além das peças tradicionais o kit inclui sensores de luz/cor, de toque e ultrassônico, permitindo a programação e montagem de protótipos com noções de distância, capazes de reagir a movimentos, luzes e cores, e de executar ações de acordo com a leitura destes sensores

10 Sensores S. De Toque S. Ultrassônico S. Luz Permite detectar contato de três formas: pressionando, liberando e tocando (pressionando e liberando rapidamente) Mede distâncias de 0 cm a 255 cm, Com margem de erro de 3 cm. Mede a Intensidade de luz ou cor do ambiente

11 Motor São o responsáveis pelos principais movimentos. São controlados por tempo, grau de rotação, ou número de rotações. Possuem sensores de rotação internos.

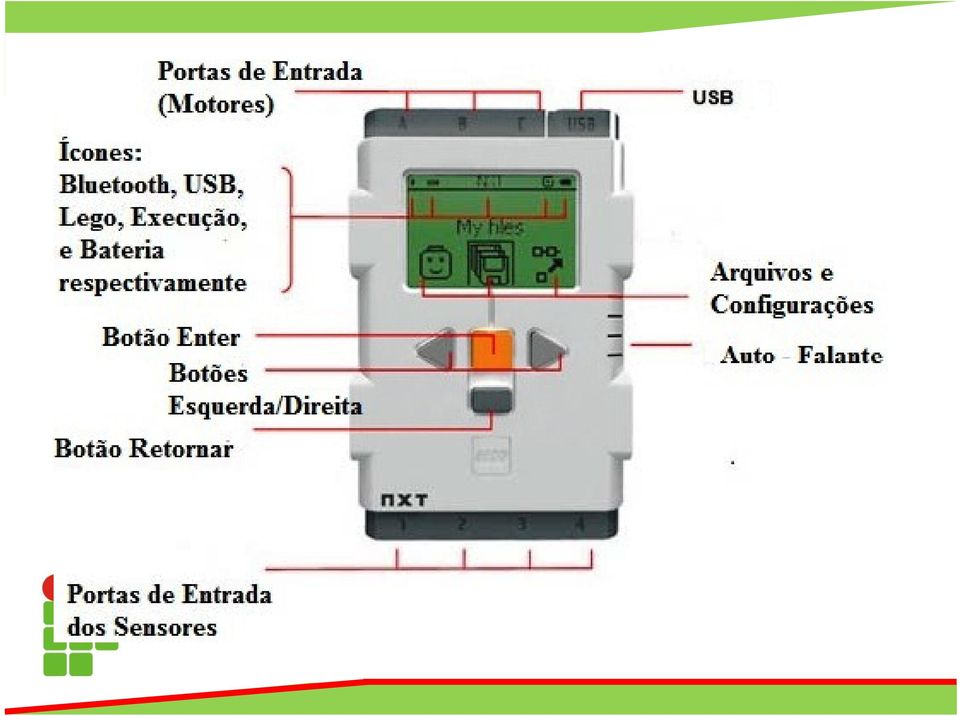
12 Lego Mindstorms NXT Outro importante componente do Kit é um microcomputador chamado de NXT que atua como o cérebro do robô, interpretando e executando as instruções dadas pelos programadores; Recebe dados dos sensores e envia comandos ao Robô.

13
14 LabVIEW LabVIEW é um ambiente de programação gráfica utilizado para desenvolver programas, testes e sistemas de controle utilizando ícones gráficos intuitivos e fios que se assemelham a um fluxograma, de uma maneira interativa.

15 LabVIEW Sua facilidade de uso, bem como sua capacidade de desenvolvimento, foram fundamentais para a colaboração da Lego, o que levou para a criação de um aplicativo próprio da empresa baseado na plataforma LabVIEW, o NXT G

16

17 1 Paleta de Ferramentas 2 Área de trabalho 3 Controlador 4 Centro de Treinamento 5 Painel de Configuração 6 Área de Ajuda

18 1 Paleta Comum 2 Paleta Completa 3 Paleta Costum

19 Descrição dos Blocos Move

20 Esperar

21 Repetir ( Loop)
22 Escolher (Se, Se não)
23 Escolher (Se, Se não)
24 Exemplo
25 Gravar / Executar Ações (dos motores)
26 Tocar Som
27 Exibir
28 Entendendo o Código
29 Entendendo o Código
30 1) Um robô com sensor de distância deve parar quando detectar algum objeto próximo a ele, e mover se para frente, caso não detecte nenhum objeto. O Sensor de distância, conectado a porta 4 do robô, deve ser configurado de maneira que caso ele detecte algum objeto a uma distância inferior de 15 cm envie um sinal para o robô parar seus motores, caso contrario, o sinal enviado será para acionar os motores; (bloco escolha sensor Dist) O robô deve ser montado com dois motores (B e C) responsáveis pelo seu movimento, caso o sensor não detecte nenhum objeto o robô deve acionar o motores para frente com uma potência de 75, durante 2 rotações. Caso o Robô detecte algum objeto ele deve parar os motores; (Bloco Mov) Tanto o bloco de sensor, como os blocos de motor devem ser colocados dentro de um bloco enquanto, este deve ser configurado como infinito, ou seja, o robô tem que executar as ações dos tópicos anteriores por tempo ilimitado; it (Bloco Enquanto).
31 1)
32 2)Umrobôcomumsensordecor,eumsensorde distância deve fazer voltas em torno de um cenário seguindo uma linha preta no chão, e seguirá essa linha até detectar um determinado objeto próximo a ele. O Sensor de cor, conectado a porta 3 do nxt, deve ser configurado de maneira que analise constantemente a cor do chão, caso ache uma cor preta, ou seja, a linha, ele envia o sinal para os motores moverem se para frente, caso ache uma cor branca, ou seja, saindo da linha, ele envia um sinal para o robô fazer uma pequena curva de 0,2 rotações para a esquerda até osensorvoltar a achar a cor preta, ou seja, retornar a linha. Dessa maneira o robô permanece na linha; (Bloco Escolha sensor cor) O Sensor de distância, conectado a porta 4 do robô, deve ser configurado de maneira que caso ele detecte algum objeto a uma distância inferior de 15 cm envie um sinal para o robô parar seus motores e a análise do sensor de cor. Caso contrario, o sinal enviado será para acionar os motores; (BlocoEscolha Sensor Dist.)
33 2) Quando o sensor de cor detectar a cor preta e/ou o sensor de distância não detectar nenhum objeto próximo a ele orobô deve acionar seus motores (B e C) para frente durante 0,2 rotações, com uma potência de 50. Caso contrário os motores dever ser parados. (Blocos Move) Todos os blocos citados anteriormente devem ser colocados dentro de um bloco enquanto, este deve ser configurado como infinito, ou seja, o robô tem que executar as ações dos tópicos anteriores por tempo ilimitado;
34 2)
35 Referências MEDINA, M. e FERTIG, C. Algoritmos e Programação: Teoria na Pratica, ed. 2. São Paulo ISBN X. PAPERT, S. LOGO: Computadores e Educação. São Paulo: Editora Brasiliense, udodecasors_2.pdf df p p
INTRODUÇÃO À PROGRAMAÇÃO COM ROBÔS LEGO
 RAYNER DE MELO PIRES ANA PAULA SUZUKI ANDRÉ REIS DE GEUS GABRIELA QUIRINO PEREIRA SALVIANO LUDGÉRIO FELIPE GOMES INTRODUÇÃO À PROGRAMAÇÃO COM ROBÔS LEGO JULHO DE 2010 SUMÁRIO 1 O que é o NXT?...4 2 Explicando
RAYNER DE MELO PIRES ANA PAULA SUZUKI ANDRÉ REIS DE GEUS GABRIELA QUIRINO PEREIRA SALVIANO LUDGÉRIO FELIPE GOMES INTRODUÇÃO À PROGRAMAÇÃO COM ROBÔS LEGO JULHO DE 2010 SUMÁRIO 1 O que é o NXT?...4 2 Explicando
Tópicos abordados. MIASI - Robótica Inteligente. http://paginas.fe.up.pt/~msi05001. Kit LEGO Mindstorms Kit Lynxmotion. Por Felipe Fitas Cardoso
 MIASI - Robótica Por Felipe Fitas Cardoso http://paginas.fe.up.pt/~msi05001 Tópicos abordados Kit LEGO Mindstorms Kit Lynxmotion 2 Apresentação É um kit de peças LEGO com designs e funções diferenciadas
MIASI - Robótica Por Felipe Fitas Cardoso http://paginas.fe.up.pt/~msi05001 Tópicos abordados Kit LEGO Mindstorms Kit Lynxmotion 2 Apresentação É um kit de peças LEGO com designs e funções diferenciadas
INTRODUÇÃO A ROBÓTICA
 INTRODUÇÃO A ROBÓTICA RODRIGO PENIDO DE AGUIAR COLÉGIO SÃO PAULO 2015 O que é robótica? A robótica é ciência que estuda a construção de robôs e computação. Ela trata de sistemas compostos por partes mecânicas
INTRODUÇÃO A ROBÓTICA RODRIGO PENIDO DE AGUIAR COLÉGIO SÃO PAULO 2015 O que é robótica? A robótica é ciência que estuda a construção de robôs e computação. Ela trata de sistemas compostos por partes mecânicas
O Laboratório de Garagem
 Oficina de Robótica O Laboratório de Garagem O Laboratório de Garagem foi fundado em 2010 e tem como proposta ser uma iniciativa voltada para a integração, colaboração e apoio aos desenvolvedores independentes
Oficina de Robótica O Laboratório de Garagem O Laboratório de Garagem foi fundado em 2010 e tem como proposta ser uma iniciativa voltada para a integração, colaboração e apoio aos desenvolvedores independentes
Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3
 Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3 A LEGO Education tem o prazer de trazer até você a edição para tablet do Software LEGO MINDSTORMS Education EV3 - um jeito divertido
Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3 A LEGO Education tem o prazer de trazer até você a edição para tablet do Software LEGO MINDSTORMS Education EV3 - um jeito divertido
Sessão Prática: Oficina de Robótica com NI LabVIEW e LEGO Mindstorms NXT
 Sessão Prática: Oficina de Robótica com NI LabVIEW e LEGO Mindstorms NXT LabVIEW e NXT Hardware Necessário: LEGO MINDSTORMS NXT Software Necessário: LabVIEW Módulo NXT Exercício 1: Atualização de firmware
Sessão Prática: Oficina de Robótica com NI LabVIEW e LEGO Mindstorms NXT LabVIEW e NXT Hardware Necessário: LEGO MINDSTORMS NXT Software Necessário: LabVIEW Módulo NXT Exercício 1: Atualização de firmware
O Uso da Robótica Educacional no Ensino Fundamental: Um estudo de caso preliminar
 O Uso da Robótica Educacional no Ensino Fundamental: Um estudo de caso preliminar Gabriela Quirino Pereira 1, Vaston G. Costa 1 1 Departamento de Ciência da Computação Universidade Federal de Goiás (UFG)
O Uso da Robótica Educacional no Ensino Fundamental: Um estudo de caso preliminar Gabriela Quirino Pereira 1, Vaston G. Costa 1 1 Departamento de Ciência da Computação Universidade Federal de Goiás (UFG)
Composição do MDK-Prog e MDK-Prog Plus
 A Modelix Robotics está lançando no mercado brasileiro dois kits de Robótica aplicada, ideal para quem deseja iniciar o aprendizado de programação de robôs e eletrônica, usando o Software Modelix System
A Modelix Robotics está lançando no mercado brasileiro dois kits de Robótica aplicada, ideal para quem deseja iniciar o aprendizado de programação de robôs e eletrônica, usando o Software Modelix System
Kit de Robótica Modelix - Programa Mais Educação 2015
 CNPJ 56.233.497/0001-42 1 CNPJ 56.233.497/0001-42 O que é Robótica Educacional? É uma metodologia de ensino que tem como objetivo fomentar no aluno a investigação e materialização dos conceitos aprendidos
CNPJ 56.233.497/0001-42 1 CNPJ 56.233.497/0001-42 O que é Robótica Educacional? É uma metodologia de ensino que tem como objetivo fomentar no aluno a investigação e materialização dos conceitos aprendidos
PARÂMETROS DO BLOCO SWITCH ESCOLHA ATRAVÉS DE UM SENSOR (TOQUE)
") BLOCO SWITCH O bloco switch (switch block), que pertence a uma categoria de blocos de programação chamados blocos de fluxo (flow blocks), permite ao programa escolher um feixe de sequência entre duas alternativas,
BLOCO SWITCH O bloco switch (switch block), que pertence a uma categoria de blocos de programação chamados blocos de fluxo (flow blocks), permite ao programa escolher um feixe de sequência entre duas alternativas,
RECONHECIMENTO DE VOZ UTILIZANDO ARDUINO
 RECONHECIMENTO DE VOZ UTILIZANDO ARDUINO Jessica Garcia Luz, Wyllian Fressatti Universidade Paranaense (Unipar) Paranavaí - PR - Brasil jessica.garcia.luz@gmail.com wyllian@unipar.br Resumo. Este artigo
RECONHECIMENTO DE VOZ UTILIZANDO ARDUINO Jessica Garcia Luz, Wyllian Fressatti Universidade Paranaense (Unipar) Paranavaí - PR - Brasil jessica.garcia.luz@gmail.com wyllian@unipar.br Resumo. Este artigo
Núcleo de Informática Aplicada à Educação Universidade Estadual de Campinas
 Núcleo de Informática Aplicada à Educação Universidade Estadual de Campinas Resumo A construção de dispositivos controlados através do computador, como ferramenta educacional associado ao trabalho com
Núcleo de Informática Aplicada à Educação Universidade Estadual de Campinas Resumo A construção de dispositivos controlados através do computador, como ferramenta educacional associado ao trabalho com
Aula 02 Conceitos básicos elipse. INFORMÁTICA INDUSTRIAL II ENG1023 Profª. Letícia Chaves Fonseca leticia.chavesfonseca@gmail.com
 Aula 02 Conceitos básicos elipse INFORMÁTICA INDUSTRIAL II ENG1023 Profª. Letícia Chaves Fonseca leticia.chavesfonseca@gmail.com 1. Introdução O Elipse E3 trabalha totalmente orientado para a operação
Aula 02 Conceitos básicos elipse INFORMÁTICA INDUSTRIAL II ENG1023 Profª. Letícia Chaves Fonseca leticia.chavesfonseca@gmail.com 1. Introdução O Elipse E3 trabalha totalmente orientado para a operação
Implementação de um módulo simulador de robôs baseado em Unity3D para o SimBot - Simulador de Robôs para Lego NXT.
 UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ Curso de Bacharelado em Ciência da Computação UNIOESTE - Campus de Cascavel MODELO PARA ELABORAÇÃO DE PROJETOS DE TRABALHO DE CONCLUSÃO DE CURSO 1. IDENTIFICAÇÃO
UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ Curso de Bacharelado em Ciência da Computação UNIOESTE - Campus de Cascavel MODELO PARA ELABORAÇÃO DE PROJETOS DE TRABALHO DE CONCLUSÃO DE CURSO 1. IDENTIFICAÇÃO
A Mecatrônica com Arduino como ferramenta para a melhoria do processo de ensino e aprendizagem
 A Mecatrônica com Arduino como ferramenta para a melhoria do processo de ensino e aprendizagem Anderson Rodrigo Cassiano dos Santos, Antonio Carlos Falcão Petri, Domingos de Carvalho Villela Júnior, Leonardo
A Mecatrônica com Arduino como ferramenta para a melhoria do processo de ensino e aprendizagem Anderson Rodrigo Cassiano dos Santos, Antonio Carlos Falcão Petri, Domingos de Carvalho Villela Júnior, Leonardo
VEÍCULO CONTROLADO POR ARDUINO ATRAVÉS DO SISTEMA OPERACIONAL ANDROID
 VEÍCULO CONTROLADO POR ARDUINO ATRAVÉS DO SISTEMA OPERACIONAL ANDROID André Luis Fadinho Portante¹, Wyllian Fressatti¹. ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil andreportante@gmail.com, wyllian@unipar.br
VEÍCULO CONTROLADO POR ARDUINO ATRAVÉS DO SISTEMA OPERACIONAL ANDROID André Luis Fadinho Portante¹, Wyllian Fressatti¹. ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil andreportante@gmail.com, wyllian@unipar.br
Microcontrolador Modelix 3.6
 Curso de Robótica 1 Curso de Robótica Introdução à robótica O desenvolvimento da robótica surgiu da necessidade de se aperfeiçoar processos de fabricação, no sentido de melhorar a qualidade dos produtos.
Curso de Robótica 1 Curso de Robótica Introdução à robótica O desenvolvimento da robótica surgiu da necessidade de se aperfeiçoar processos de fabricação, no sentido de melhorar a qualidade dos produtos.
Introdução ao Robotic Control X RCX e Robolab. jvilhete@unicamp.br
 Introdução ao Robotic Control X RCX e Robolab João Vilhete Viegas d Abreu jvilhete@unicamp.br NIED/UNICAMP 1. RESUMO Esta apostila tem por objetivo básico apresentar o tijolo programávell LEGO/RCX e, um
Introdução ao Robotic Control X RCX e Robolab João Vilhete Viegas d Abreu jvilhete@unicamp.br NIED/UNICAMP 1. RESUMO Esta apostila tem por objetivo básico apresentar o tijolo programávell LEGO/RCX e, um
Programação de Robótica: Modo Circuitos Programados - Avançado -
 Programação de Robótica: Modo Circuitos Programados - Avançado - 1 Programação de Robótica: Modo Circuitos Programados - Avançado ATENÇÃO Lembramos que você poderá consultar o Manual de Referência do Software
Programação de Robótica: Modo Circuitos Programados - Avançado - 1 Programação de Robótica: Modo Circuitos Programados - Avançado ATENÇÃO Lembramos que você poderá consultar o Manual de Referência do Software
Apresentação. www.modelix.com.br Tel: (11) 3858-0099 - contato@modelix.com.br
 3858-0099 - contato@modelix.com.br") COMBO 8.0 Solução Escolar Modelix A Solução Educacional Modelix, é um programa criado especialmente a fim de suprir as necessidades de implantação de um curso de robótica. Seja ele para escolas de ensino
COMBO 8.0 Solução Escolar Modelix A Solução Educacional Modelix, é um programa criado especialmente a fim de suprir as necessidades de implantação de um curso de robótica. Seja ele para escolas de ensino
Como usar a robótica pedagógica aplicada ao currículo
 1 Congresso sobre práticas inovadoras na educação em um mundo impulsionado pela tecnologia Workshop: Como usar a robótica pedagógica aplicada ao currículo Palestrante: João Vilhete Viegas d'abreu Núcleo
1 Congresso sobre práticas inovadoras na educação em um mundo impulsionado pela tecnologia Workshop: Como usar a robótica pedagógica aplicada ao currículo Palestrante: João Vilhete Viegas d'abreu Núcleo
OBJETIVOS TECNOLÓGICOS CONTEÚDOS CURRICULARES COMPETÊNCIAS COGNITIVAS COMPETÊNCIAS SOCIOEMOCIONAIS
 1 o ano Conhecer as peças LEGO do kit 9656. Equilíbrio. Praticar encaixes entre as peças LEGO. Verticalidade. Noções de medidas lineares. Planejar. Programar. Construir montagens estáveis e que se sustentem
1 o ano Conhecer as peças LEGO do kit 9656. Equilíbrio. Praticar encaixes entre as peças LEGO. Verticalidade. Noções de medidas lineares. Planejar. Programar. Construir montagens estáveis e que se sustentem
ESTUDO COMPARATIVO ENTRE AS PLATAFORMAS ARDUINO E PIC
 ESTUDO COMPARATIVO ENTRE AS PLATAFORMAS ARDUINO E PIC Tiago Menezes Xavier de Souza¹, Igor dos Passos Granado¹, Wyllian Fressatti¹ ¹Universidade Paranaense (UNIPAR) Paranavaí- PR- Brasil tiago_x666@hotmail.com,
ESTUDO COMPARATIVO ENTRE AS PLATAFORMAS ARDUINO E PIC Tiago Menezes Xavier de Souza¹, Igor dos Passos Granado¹, Wyllian Fressatti¹ ¹Universidade Paranaense (UNIPAR) Paranavaí- PR- Brasil tiago_x666@hotmail.com,
CADERNO DE QUESTÕES WINDOWS 8
 CADERNO DE QUESTÕES WINDOWS 8 1) No sistema operacional Microsoft Windows 8, uma forma rápida de acessar o botão liga/desliga é através do atalho: a) Windows + A. b) ALT + C. c) Windows + I. d) CTRL +
CADERNO DE QUESTÕES WINDOWS 8 1) No sistema operacional Microsoft Windows 8, uma forma rápida de acessar o botão liga/desliga é através do atalho: a) Windows + A. b) ALT + C. c) Windows + I. d) CTRL +
V Semana de Ciência e Tecnologia IFMG - campus Bambuí V Jornada Científica 19 a 24 de novembro de 2012
 LEARN IN SQL FERRAMENTA DE AUXÍLIO NO ENSINO-APRENDIZAGEM DE SQL/BANCO DE DADOS Junio MOREIRA 1 ; Silas ANTÔNIO CEREDA DA SILVA 2 ; Marcos VINÍCIUS DE CASTRO SILVA 4 ; Samuel DE OLIVEIRA PERFISTER 5 ;
LEARN IN SQL FERRAMENTA DE AUXÍLIO NO ENSINO-APRENDIZAGEM DE SQL/BANCO DE DADOS Junio MOREIRA 1 ; Silas ANTÔNIO CEREDA DA SILVA 2 ; Marcos VINÍCIUS DE CASTRO SILVA 4 ; Samuel DE OLIVEIRA PERFISTER 5 ;
Projeto de controle e Automação de Antena
 Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE
 CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE Roland Yuri Schreiber 1 ; Tiago Andrade Camacho 2 ; Tiago Boechel 3 ; Vinicio Alexandre Bogo Nagel 4 INTRODUÇÃO Nos últimos anos, a área de Sistemas
CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE Roland Yuri Schreiber 1 ; Tiago Andrade Camacho 2 ; Tiago Boechel 3 ; Vinicio Alexandre Bogo Nagel 4 INTRODUÇÃO Nos últimos anos, a área de Sistemas
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
ALGORITMOS E TÉCNICAS DE PROGRAMAÇÃO
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE ALGORITMOS E TÉCNICAS DE PROGRAMAÇÃO Docente: Éberton da Silva Marinho e-mail: ebertonsm@gmail.com eberton.marinho@ifrn.edu.br
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE ALGORITMOS E TÉCNICAS DE PROGRAMAÇÃO Docente: Éberton da Silva Marinho e-mail: ebertonsm@gmail.com eberton.marinho@ifrn.edu.br
Universidade Federal de Santa Maria UFSM Centro de Tecnologia CT. Power Point. Básico
 Universidade Federal de Santa Maria UFSM Centro de Tecnologia CT Power Point Básico Santa Maria, julho de 2006 O Power Point é um aplicativo do Microsoft Office direcionado à criação de apresentações.
Universidade Federal de Santa Maria UFSM Centro de Tecnologia CT Power Point Básico Santa Maria, julho de 2006 O Power Point é um aplicativo do Microsoft Office direcionado à criação de apresentações.
MBA Executivo. Coordenação Acadêmica: Prof. Marcos Avila Apoio em EaD: Prof a. Mônica Ferreira da Silva Coordenação Executiva: Silvia Martins Mendonça
 Coordenação Acadêmica: Prof. Marcos Avila Apoio em EaD: Prof a. Mônica Ferreira da Silva Coordenação Executiva: Silvia Martins Mendonça 1 O Instituto COPPEAD: O Instituto COPPEAD oferece o curso de especialização
Coordenação Acadêmica: Prof. Marcos Avila Apoio em EaD: Prof a. Mônica Ferreira da Silva Coordenação Executiva: Silvia Martins Mendonça 1 O Instituto COPPEAD: O Instituto COPPEAD oferece o curso de especialização
Acionamento através de senha*, cartão de proximidade e biometria. Compatível com fechaduras magnéticas, eletroímãs e cancelas.
 1/8 Visão Geral: Instalação e configuração simplificada. Alta capacidade de armazenamento de registros e usuários. Acionamento através de senha*, cartão de proximidade e biometria. Compatível com fechaduras
1/8 Visão Geral: Instalação e configuração simplificada. Alta capacidade de armazenamento de registros e usuários. Acionamento através de senha*, cartão de proximidade e biometria. Compatível com fechaduras
Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.
![Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.](/thumbs/26/7510700.jpg "Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.") Servomotores Este pequeno tutorial tem como finalidade auxiliar no entendimento de um dos componentes básico utilizados na construção de robôs móveis. www.sumoderobos.org Compilado por André Santos Agosto
Servomotores Este pequeno tutorial tem como finalidade auxiliar no entendimento de um dos componentes básico utilizados na construção de robôs móveis. www.sumoderobos.org Compilado por André Santos Agosto
Guia. PDA e SmartPhones. Windows Mobile, Pocket PC e CE.
 Guia PDA e SmartPhones Windows Mobile, Pocket PC e CE. Referência completa para o integrador do sistema Module. Aborda os recursos necessários para a itulização, instalação do software e importação das
Guia PDA e SmartPhones Windows Mobile, Pocket PC e CE. Referência completa para o integrador do sistema Module. Aborda os recursos necessários para a itulização, instalação do software e importação das
UniRitter tecnológica: integrando Engenharias para desenvolvimento de um robô humanoide
 - SEPesq UniRitter tecnológica: integrando Engenharias para desenvolvimento de um robô humanoide 1. Introdução Diego Augusto de Jesus Pacheco Giovani Geremia Segundo Vargas (2012) é perceptível que uma
- SEPesq UniRitter tecnológica: integrando Engenharias para desenvolvimento de um robô humanoide 1. Introdução Diego Augusto de Jesus Pacheco Giovani Geremia Segundo Vargas (2012) é perceptível que uma
ULA Sinais de Controle enviados pela UC
 Solução - Exercícios Processadores 1- Qual as funções da Unidade Aritmética e Lógica (ULA)? A ULA é o dispositivo da CPU que executa operações tais como: Adição Subtração Multiplicação Divisão Incremento
Solução - Exercícios Processadores 1- Qual as funções da Unidade Aritmética e Lógica (ULA)? A ULA é o dispositivo da CPU que executa operações tais como: Adição Subtração Multiplicação Divisão Incremento
Configurando um Sensor
 Configurando um Sensor Vamos supor que temos um bloco NXT com um sensor de luz ligado na porta 3. Como dizemos isto ao Enchanting? 1. Clicar no botão Sensores. 2. Clicar no Botão Configurar Sensores. Aparece
Configurando um Sensor Vamos supor que temos um bloco NXT com um sensor de luz ligado na porta 3. Como dizemos isto ao Enchanting? 1. Clicar no botão Sensores. 2. Clicar no Botão Configurar Sensores. Aparece
Rodrigues, Laís ; Pinto, Simone;Coutinho, Liliana;Dahmouche,Mônica;Brito,Nathaly.
 ROBÓTICA EDUCACIONAL: OFICINA DE ROBÓTICA PARA O PÚBICO INFANTIL NO MUSEU CIÊNCIA E VIDA Rodrigues, Laís ; Pinto, Simone;Coutinho, Liliana;Dahmouche,Mônica;Brito,Nathaly. 1 ROBÓTICA EDUCACIONAL: OFICINA
ROBÓTICA EDUCACIONAL: OFICINA DE ROBÓTICA PARA O PÚBICO INFANTIL NO MUSEU CIÊNCIA E VIDA Rodrigues, Laís ; Pinto, Simone;Coutinho, Liliana;Dahmouche,Mônica;Brito,Nathaly. 1 ROBÓTICA EDUCACIONAL: OFICINA
Manual do instalador Box Input Rev. 0.01.000. Figura 01 Apresentação do Box Input.
 Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
PERFIL PROFISSIONAL TÉCNICO/A DE ELECTRÓNICA. PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/10
 PERFIL PROFISSIONAL TÉCNICO/A DE ELECTRÓNICA PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/10 ÁREA DE ACTIVIDADE OBJECTIVO GLOBAL SAÍDA(S) PROFISSIONAL(IS) -
PERFIL PROFISSIONAL TÉCNICO/A DE ELECTRÓNICA PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/10 ÁREA DE ACTIVIDADE OBJECTIVO GLOBAL SAÍDA(S) PROFISSIONAL(IS) -
SUMÁRIO. Motivação Contextualização Objetivo Desenvolvimento. Aplicação Discussão Conclusão Perguntas. Hardware Software
 SUMÁRIO Motivação Contextualização Objetivo Desenvolvimento Etapas de preparação Hardware Software Aplicação Discussão Conclusão Perguntas MOTIVAÇÃO Interesse em novas tecnologias Interesse no desenvolvimento
SUMÁRIO Motivação Contextualização Objetivo Desenvolvimento Etapas de preparação Hardware Software Aplicação Discussão Conclusão Perguntas MOTIVAÇÃO Interesse em novas tecnologias Interesse no desenvolvimento
Manual de Montagem REVISÃO 312.20. www.robouno.com.br
 Manual de Montagem REVISÃO 312.20 Manual de Montagem 01 Suporte Roda Caster 01 Roda Caster Parafusos 3x8mm Porcas 11 03 2 Observe a posição dos furos 01 Chassi Lateral 01 Motor Parafusos 3x8mm Porcas 12
Manual de Montagem REVISÃO 312.20 Manual de Montagem 01 Suporte Roda Caster 01 Roda Caster Parafusos 3x8mm Porcas 11 03 2 Observe a posição dos furos 01 Chassi Lateral 01 Motor Parafusos 3x8mm Porcas 12
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA
 FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
Lego NXT usando NXC. Prof. Marcelo Santos Linder
 Programando Robôs Lego NXT usando NXC Prof. Marcelo Santos Linder Robô (kit) Lego NXT Linguagem NXC Sumário Estrutura geral de um programa Estruturas de controle de fluxo Motores Sensores Exemplos de robôs
Programando Robôs Lego NXT usando NXC Prof. Marcelo Santos Linder Robô (kit) Lego NXT Linguagem NXC Sumário Estrutura geral de um programa Estruturas de controle de fluxo Motores Sensores Exemplos de robôs
Servo Motores. Jener Toscano Lins e Silva
 Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Servo Motores Jener Toscano Lins e Silva
Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Servo Motores Jener Toscano Lins e Silva
Lojamundi CNPJ: 17.869.444/0001-60 Av. Paranoá Qd. 09 conj. 01 lote 01 sala 304, Paranoá DF CEP: 71.571-012 www.lojamundi.com.br
 Pensando em você e sua família a Lojamundi trouxe as câmeras IP s Wireless, maior segurança e tranquilidade, a um excelente custo benefício. É possível acessar suas imagens em tempo real de qualquer lugar,
Pensando em você e sua família a Lojamundi trouxe as câmeras IP s Wireless, maior segurança e tranquilidade, a um excelente custo benefício. É possível acessar suas imagens em tempo real de qualquer lugar,
Universidade Federal da Fronteira Sul Campus Chapecó Sistema Operacional
 Universidade Federal da Fronteira Sul Campus Chapecó Sistema Operacional Elaboração: Prof. Éverton Loreto everton@uffs.edu.br 2010 Objetivo Conhecer as características e recursos do Sistema Operacional
Universidade Federal da Fronteira Sul Campus Chapecó Sistema Operacional Elaboração: Prof. Éverton Loreto everton@uffs.edu.br 2010 Objetivo Conhecer as características e recursos do Sistema Operacional
Procedimentos para configurar o Motion Detection no D-ViewCam 1 Para configurar o Motion Detection no D-ViewCam, é necessário que a câmera IP esteja
 Procedimentos para configurar o Motion Detection no D-ViewCam 1 Para configurar o Motion Detection no D-ViewCam, é necessário que a câmera IP esteja conectada ao software (D-ViewCam). 1 2 Abra o D-ViewCam
Procedimentos para configurar o Motion Detection no D-ViewCam 1 Para configurar o Motion Detection no D-ViewCam, é necessário que a câmera IP esteja conectada ao software (D-ViewCam). 1 2 Abra o D-ViewCam
TÍTULO: GARRA ROBÓTICA PERCEPTIVA CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: COMPUTAÇÃO E INFORMÁTICA
 TÍTULO: GARRA ROBÓTICA PERCEPTIVA CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: COMPUTAÇÃO E INFORMÁTICA INSTITUIÇÃO: CENTRO UNIVERSITÁRIO GERALDO DI BIASE AUTOR(ES): EDUARDO REIS ALVES,
TÍTULO: GARRA ROBÓTICA PERCEPTIVA CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: COMPUTAÇÃO E INFORMÁTICA INSTITUIÇÃO: CENTRO UNIVERSITÁRIO GERALDO DI BIASE AUTOR(ES): EDUARDO REIS ALVES,
Adquirindo dados de medição para sua pesquisa com LabVIEW e CompactDAQ
 Adquirindo dados de medição para sua pesquisa com LabVIEW e CompactDAQ Apresentado por National Instruments Necessidades de um pesquisador Obter resultados específicos com um determinado orçamento Necessidade
Adquirindo dados de medição para sua pesquisa com LabVIEW e CompactDAQ Apresentado por National Instruments Necessidades de um pesquisador Obter resultados específicos com um determinado orçamento Necessidade
R O B Ó T I C A. Sensor Smart. Ultrassom. Versão Hardware: 1.0 Versão Firmware: 1.0 REVISÃO 1211.13. www.robouno.com.br
 R O B Ó T I C A Sensor Smart Ultrassom Versão Hardware: 1.0 Versão Firmware: 1.0 REVISÃO 1211.13 Sensor Smart Ultrassom 1. Introdução Os sensores de ultrassom ou ultrassônicos são sensores que detectam
R O B Ó T I C A Sensor Smart Ultrassom Versão Hardware: 1.0 Versão Firmware: 1.0 REVISÃO 1211.13 Sensor Smart Ultrassom 1. Introdução Os sensores de ultrassom ou ultrassônicos são sensores que detectam
NORMAS PARA ENVIO DE TRABALHOS (Resumos Expandidos, Pôster e Oral)
") NORMAS PARA ENVIO DE TRABALHOS (Resumos Expandidos, Pôster e Oral) V CONGRESSO INTERNACIONAL DE TECNOLOGIA EDUCACIONAL DA ASSOCIAÇÃO BRASILEIRA DE TECNOLOGIA EDUCACIONAL EXPECTATIVAS E AÇÕES TRANSFORMADORAS:
NORMAS PARA ENVIO DE TRABALHOS (Resumos Expandidos, Pôster e Oral) V CONGRESSO INTERNACIONAL DE TECNOLOGIA EDUCACIONAL DA ASSOCIAÇÃO BRASILEIRA DE TECNOLOGIA EDUCACIONAL EXPECTATIVAS E AÇÕES TRANSFORMADORAS:
ATIVIDADES PRÁTICAS SUPERVISIONADAS
 ATIVIDADES PRÁTICAS SUPERVISIONADAS CST em Análise e Desenvolvimento de Sistemas 4ª Série Programação em Dispositivos Móveis A Atividade Prática Supervisionada (ATPS) é um procedimento metodológico de
ATIVIDADES PRÁTICAS SUPERVISIONADAS CST em Análise e Desenvolvimento de Sistemas 4ª Série Programação em Dispositivos Móveis A Atividade Prática Supervisionada (ATPS) é um procedimento metodológico de
SECRETÁRIA DE ESTADO DA EDUCAÇÃO DO PARANÁ CURSO PROFISSIONALIZANTE INFORMÁTICA
 SECRETÁRIA DE ESTADO DA EDUCAÇÃO DO PARANÁ CURSO PROFISSIONALIZANTE INFORMÁTICA Documento elaborado no encontro realizado de 10 a 12 de agosto de 2004. Curitiba, PR Perfil do Profissional Ao final de cada
SECRETÁRIA DE ESTADO DA EDUCAÇÃO DO PARANÁ CURSO PROFISSIONALIZANTE INFORMÁTICA Documento elaborado no encontro realizado de 10 a 12 de agosto de 2004. Curitiba, PR Perfil do Profissional Ao final de cada
EaD como estratégia de capacitação
 EaD como estratégia de capacitação A EaD no processo Ensino Aprendizagem O desenvolvimento das tecnologias de informação e comunicação (tics) deu novo impulso a EaD, colocando-a em evidência na última
EaD como estratégia de capacitação A EaD no processo Ensino Aprendizagem O desenvolvimento das tecnologias de informação e comunicação (tics) deu novo impulso a EaD, colocando-a em evidência na última
Leitor MaxProx-Lista-PC
 Leitor MaxProx-Lista-PC O leitor de cartões de proximidade MaxProx-Lista-PC é destinado aos Integradores de Controle de Acesso. Ele foi especialmente projetado para controle de acesso, para ser usado Stand
Leitor MaxProx-Lista-PC O leitor de cartões de proximidade MaxProx-Lista-PC é destinado aos Integradores de Controle de Acesso. Ele foi especialmente projetado para controle de acesso, para ser usado Stand
TÍTULO: JANELA AUTOMATIZADA QUE OPERA A PARTIR DE DADOS METEOROLÓGICOS OBTIDOS POR SENSORES
 TÍTULO: JANELA AUTOMATIZADA QUE OPERA A PARTIR DE DADOS METEOROLÓGICOS OBTIDOS POR SENSORES CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: UNIVERSIDADE SANTA CECÍLIA
TÍTULO: JANELA AUTOMATIZADA QUE OPERA A PARTIR DE DADOS METEOROLÓGICOS OBTIDOS POR SENSORES CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: UNIVERSIDADE SANTA CECÍLIA
Plataforma ARDUINO Aplicada a Projetos Interdisciplinares. Clebson Joel Mendes de Oliveira Faculdade do Centro Leste - UCL
 Plataforma ARDUINO Aplicada a Projetos Interdisciplinares Clebson Joel Mendes de Oliveira Faculdade do Centro Leste - UCL Introdução Projeto Interdisciplinar 2 (PI 2) Elementos de Automação dos Projetos
Plataforma ARDUINO Aplicada a Projetos Interdisciplinares Clebson Joel Mendes de Oliveira Faculdade do Centro Leste - UCL Introdução Projeto Interdisciplinar 2 (PI 2) Elementos de Automação dos Projetos
Como funciona o Reed-Switches (MEC089)
") Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
PERFIL PROFISSIONAL TÉCNICO(A) DE ELECTRÓNICA. PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/6
 DE ELECTRÓNICA. PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/6") PERFIL PROFISSIONAL TÉCNICO(A) DE ELECTRÓNICA PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/6 ÁREA DE ACTIVIDADE - ELECTRÓNICA E AUTOMAÇÃO OBJECTIVO GLOBAL -
PERFIL PROFISSIONAL TÉCNICO(A) DE ELECTRÓNICA PERFIL PROFISSIONAL Técnico/a de Electrónica Nível 3 CATÁLOGO NACIONAL DE QUALIFICAÇÕES 1/6 ÁREA DE ACTIVIDADE - ELECTRÓNICA E AUTOMAÇÃO OBJECTIVO GLOBAL -
App Inventor 2 - programação divertida para Android
 App Inventor 2 - programação divertida para Android 1 APP INVENTOR 2 O App Inventor é um ambiente de programação desenvolvido pelo MIT (Massachusetts Institute of Technology), especialmente desenhado para
App Inventor 2 - programação divertida para Android 1 APP INVENTOR 2 O App Inventor é um ambiente de programação desenvolvido pelo MIT (Massachusetts Institute of Technology), especialmente desenhado para
Introdução à Engenharia de Computadores e Telemática. Guião das Aulas Práticas
 Introdução à Engenharia de Computadores e Telemática Guião das Aulas Práticas Departamento de Eletrónica, Telecomunicações e Informática Universidade de Aveiro 20122013 Conteúdo 1 Introdução ao UNIX 3
Introdução à Engenharia de Computadores e Telemática Guião das Aulas Práticas Departamento de Eletrónica, Telecomunicações e Informática Universidade de Aveiro 20122013 Conteúdo 1 Introdução ao UNIX 3
Desenvolvimento de jogo digital para ensino de português e matemática para crianças do ensino básico. 1. Introdução
 Desenvolvimento de jogo digital para ensino de português e matemática para crianças do ensino básico Danilo Raniery Alves Coutinho (Bolsista) José Raul Brito Andrade (Voluntário) Ana Liz Souto Oliveira
Desenvolvimento de jogo digital para ensino de português e matemática para crianças do ensino básico Danilo Raniery Alves Coutinho (Bolsista) José Raul Brito Andrade (Voluntário) Ana Liz Souto Oliveira
SISTEMA DE RASTREIO ÓPTICO
 SISTEMA DE RASTREIO ÓPTICO 1 SISTEMA DE RASTREIO ÓPTICO VISÃO GERAL O Sistema de Rastreio Óptico, ou simplesmente SISROT, foi desenvolvido com o objetivo de rastrear foguetes nos primeiros instantes de
SISTEMA DE RASTREIO ÓPTICO 1 SISTEMA DE RASTREIO ÓPTICO VISÃO GERAL O Sistema de Rastreio Óptico, ou simplesmente SISROT, foi desenvolvido com o objetivo de rastrear foguetes nos primeiros instantes de
LEGO MINDSTORMS NXT E A OLIMPÍADA BRASILEIRA DE ROBÓTICA
 CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA CEFET-MG CAMPUS DIVINÓPOLIS CONTEXTO SOCIAL E PROFISSIONAL ENGENHARIA MECATRÔNICA 1 PERIODO PROF.: RENATO DE SOUSA DÂMASO LEGO MINDSTORMS NXT E A OLIMPÍADA BRASILEIRA
CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA CEFET-MG CAMPUS DIVINÓPOLIS CONTEXTO SOCIAL E PROFISSIONAL ENGENHARIA MECATRÔNICA 1 PERIODO PROF.: RENATO DE SOUSA DÂMASO LEGO MINDSTORMS NXT E A OLIMPÍADA BRASILEIRA
PERFIL PROFISSIONAL TÉCNICO/A DE ELECTRÓNICA, AUTOMAÇÃO E COMPUTADORES 1 / 6
 PERFIL PROFISSIONAL TÉCNICO/A DE ELECTRÓNICA, AUTOMAÇÃO E COMPUTADORES Publicação e actualizações Publicado no Despacho n.º13456/2008, de 14 de Maio, que aprova a versão inicial do Catálogo Nacional de
PERFIL PROFISSIONAL TÉCNICO/A DE ELECTRÓNICA, AUTOMAÇÃO E COMPUTADORES Publicação e actualizações Publicado no Despacho n.º13456/2008, de 14 de Maio, que aprova a versão inicial do Catálogo Nacional de
Manual do Aplicativo NSE Mobile Control
 INSTALAÇÃO DO APLICATIVO Acesse www.nse.com.br/downloads-manuais e baixe os programas de acordo com o dispositivo que irá utilizar, nos links referentes ao produto número 1 - Módulo MTCP-3E4S. - Para uso
INSTALAÇÃO DO APLICATIVO Acesse www.nse.com.br/downloads-manuais e baixe os programas de acordo com o dispositivo que irá utilizar, nos links referentes ao produto número 1 - Módulo MTCP-3E4S. - Para uso
Manual de Operação Balança Eletrônica Mod: EB 2001
 Manual de Operação Balança Eletrônica Mod: EB 2001 1 Descrição: A balança eletrônica produzida por nossa empresa utiliza tecnologia de ponta, baixo consumo de energia e conversores analógicos/digitais
Manual de Operação Balança Eletrônica Mod: EB 2001 1 Descrição: A balança eletrônica produzida por nossa empresa utiliza tecnologia de ponta, baixo consumo de energia e conversores analógicos/digitais
INDÚSTRIA CONTRATA: PARA FAXINAL DOS GUEDES
 INDÚSTRIA CONTRATA: PARA FAXINAL DOS GUEDES Cargo: Engenheiro mecânico Área de atuação: projetos, fabricação e instalação de equipamento para a manipulação e processamento de produtos sólidos utilizados
INDÚSTRIA CONTRATA: PARA FAXINAL DOS GUEDES Cargo: Engenheiro mecânico Área de atuação: projetos, fabricação e instalação de equipamento para a manipulação e processamento de produtos sólidos utilizados
FACULDADE SANTO AGOSTINHO DIREÇÃO DE ENSINO COORDENAÇÃO DO CURSO DE ENGENHARIA ELÉTRICA COMPETIÇÃO DE ROBÔS
 FACULDADE SANTO AGOSTINHO DIREÇÃO DE ENSINO COORDENAÇÃO DO CURSO DE ENGENHARIA ELÉTRICA EDITAL N 06/2015.2 COMPETIÇÃO DE ROBÔS 1. Da Apresentação A COMPETIÇÃO DE ROBÔS será um evento realizado durante
FACULDADE SANTO AGOSTINHO DIREÇÃO DE ENSINO COORDENAÇÃO DO CURSO DE ENGENHARIA ELÉTRICA EDITAL N 06/2015.2 COMPETIÇÃO DE ROBÔS 1. Da Apresentação A COMPETIÇÃO DE ROBÔS será um evento realizado durante
CONSTRUÇÃO DE UM ROBÔ TERRESTRE CONTROLADO REMOTAMENTE UTILIZANDO A PLATAFORMA ARDUINO
 CONSTRUÇÃO DE UM ROBÔ TERRESTRE CONTROLADO REMOTAMENTE UTILIZANDO A PLATAFORMA ARDUINO Leopoldo Jacobsen¹, Wyllian Fressatti¹ ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil leopoldojacobsen@gmail.com,
CONSTRUÇÃO DE UM ROBÔ TERRESTRE CONTROLADO REMOTAMENTE UTILIZANDO A PLATAFORMA ARDUINO Leopoldo Jacobsen¹, Wyllian Fressatti¹ ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil leopoldojacobsen@gmail.com,
Planejamento e Execução de Treinamentos
 Aprovado por Comitê da Qualidade Analisado criticamente por Chefe do Departamento 1 OBJETIVOS Esta instrução tem como objetivo orientar os colaboradores do Departamento de Inovação Tecnológica para planejar,
Aprovado por Comitê da Qualidade Analisado criticamente por Chefe do Departamento 1 OBJETIVOS Esta instrução tem como objetivo orientar os colaboradores do Departamento de Inovação Tecnológica para planejar,
MATEMÁTICA E TECNOLOGIA: DESENVOLVENDO JOGOS ELETRÔNICOS UTILIZANDO O SCRATCH
 MATEMÁTICA E TECNOLOGIA: DESENVOLVENDO JOGOS ELETRÔNICOS UTILIZANDO O SCRATCH Lucas Gabriel Seibert, Rodrigo Dalla Vecchia lucasseibert@hotmail.com, rodrigovecchia@gmail.com ULBRA, Brasil Palavras-chave:
MATEMÁTICA E TECNOLOGIA: DESENVOLVENDO JOGOS ELETRÔNICOS UTILIZANDO O SCRATCH Lucas Gabriel Seibert, Rodrigo Dalla Vecchia lucasseibert@hotmail.com, rodrigovecchia@gmail.com ULBRA, Brasil Palavras-chave:
UM MODELO PARA GESTÃO DE LICENCIATURAS NO EAD: EXPERIÊNCIA DO CURSO DE LICENCIATURA EM INFORMÁTICA IFES
 1 UM MODELO PARA GESTÃO DE LICENCIATURAS NO EAD: EXPERIÊNCIA DO CURSO DE LICENCIATURA EM INFORMÁTICA IFES Instituto Federal do Espírito Santo (IFES) Campus Cachoeiro de Itapemirim 03/2010 Giovany F. Teixeira
1 UM MODELO PARA GESTÃO DE LICENCIATURAS NO EAD: EXPERIÊNCIA DO CURSO DE LICENCIATURA EM INFORMÁTICA IFES Instituto Federal do Espírito Santo (IFES) Campus Cachoeiro de Itapemirim 03/2010 Giovany F. Teixeira
Apostila de Robótica Educacional Versão 1.0
 Universidade Federal Fluminense TEE - Departamento de Engenharia Elétrica Programa de Educação Tutorial da Engenharia Elétrica - PET-Elétrica Apostila de Robótica Educacional Versão 1.0 Niterói Rio de
Universidade Federal Fluminense TEE - Departamento de Engenharia Elétrica Programa de Educação Tutorial da Engenharia Elétrica - PET-Elétrica Apostila de Robótica Educacional Versão 1.0 Niterói Rio de
3.1. Título: Módulo Gerador de Planos de Rotas para um Sistema de Navegação Autônoma Baseado na Arquitetura AuRA
 UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ Curso de Bacharelado em Ciência da Computação UNIOESTE - Campus de Cascavel MODELO PARA ELABORAÇÃO DE PROJETOS DE TRABALHO DE CONCLUSÃO DE CURSO 1. IDENTIFICAÇÃO
UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ Curso de Bacharelado em Ciência da Computação UNIOESTE - Campus de Cascavel MODELO PARA ELABORAÇÃO DE PROJETOS DE TRABALHO DE CONCLUSÃO DE CURSO 1. IDENTIFICAÇÃO
Manual do Usuário Android Neocontrol
 Manual do Usuário Android Neocontrol Sumário 1.Licença e Direitos Autorais...3 2.Sobre o produto...4 3. Instalando, Atualizando e executando o Android Neocontrol em seu aparelho...5 3.1. Instalando o aplicativo...5
Manual do Usuário Android Neocontrol Sumário 1.Licença e Direitos Autorais...3 2.Sobre o produto...4 3. Instalando, Atualizando e executando o Android Neocontrol em seu aparelho...5 3.1. Instalando o aplicativo...5
Processos de Desenvolvimento de Software
 Processos de Desenvolvimento de Software Gerenciamento de Projetos Mauro Lopes Carvalho Silva Professor EBTT DAI Departamento de Informática Campus Monte Castelo Instituto Federal de Educação Ciência e
Processos de Desenvolvimento de Software Gerenciamento de Projetos Mauro Lopes Carvalho Silva Professor EBTT DAI Departamento de Informática Campus Monte Castelo Instituto Federal de Educação Ciência e
Abordagem de Licenciandos sobre softwares educacionais de Química
 Abordagem de Licenciandos sobre softwares educacionais de Química Autor(a): Joycyely Marytza 1 INTRODUÇÃO As atuais concepções pedagógicas exigem do professor a inclusão das novas tecnologias para um melhor
Abordagem de Licenciandos sobre softwares educacionais de Química Autor(a): Joycyely Marytza 1 INTRODUÇÃO As atuais concepções pedagógicas exigem do professor a inclusão das novas tecnologias para um melhor
Um Ambiente Gráfico para Desenvolvimento de Software de Controle para Robôs Móveis Utilizando Simulação 3D
 Um Ambiente Gráfico para Desenvolvimento de Software de Controle para Robôs Móveis Utilizando Simulação 3D Cardoso Marchezi e Hans-Jorg Andreas Schneebeli VIII Simpósio Brasileiro de Automação Inteligente
Um Ambiente Gráfico para Desenvolvimento de Software de Controle para Robôs Móveis Utilizando Simulação 3D Cardoso Marchezi e Hans-Jorg Andreas Schneebeli VIII Simpósio Brasileiro de Automação Inteligente
Ficha Técnica. Apresentação
 Ficha Técnica Apresentação O Curso Materiais Didáticos para Educação a Distância foi elaborado com o objetivo de proporcionar o conhecimento de base sobre o desenvolvimento didático dos materiais na modalidade
Ficha Técnica Apresentação O Curso Materiais Didáticos para Educação a Distância foi elaborado com o objetivo de proporcionar o conhecimento de base sobre o desenvolvimento didático dos materiais na modalidade
Universidade Anhanguera Uniderp Centro de Educação a Distância
 Universidade Anhanguera Uniderp Centro de Educação a Distância CURSOS DE GRADUAÇÃO MODALIDADE A DISTÂNCIA 2º semestre letivo / 2012 Sumário 1. Objetivo... 04 2. O Ambiente Virtual de Aprendizagem... 04
Universidade Anhanguera Uniderp Centro de Educação a Distância CURSOS DE GRADUAÇÃO MODALIDADE A DISTÂNCIA 2º semestre letivo / 2012 Sumário 1. Objetivo... 04 2. O Ambiente Virtual de Aprendizagem... 04
Reconhecimento de imagem com uso de veículo autônomo. 1/5 www.ni.com
 Reconhecimento de imagem com uso de veículo autônomo "Este artigo aborda o desenvolvimento de um veículo autônomo, que utiliza o reconhecimento de imagens para se locomover até um determinado objeto, identificado
Reconhecimento de imagem com uso de veículo autônomo "Este artigo aborda o desenvolvimento de um veículo autônomo, que utiliza o reconhecimento de imagens para se locomover até um determinado objeto, identificado
MINISTÉRIO DA EDUCAÇÃO INSTITUTO NACIONAL DE ESTUDOS E PESQUISAS EDUCACIONAIS ANÍSIO TEIXEIRA
 MINISTÉRIO DA EDUCAÇÃO INSTITUTO NACIONAL DE ESTUDOS E PESQUISAS EDUCACIONAIS ANÍSIO TEIXEIRA PORTARIA Nº 235, DE 2 DE JUNHO DE 2014 O Presidente do Instituto Nacional de Estudos e Pesquisas Educacionais
MINISTÉRIO DA EDUCAÇÃO INSTITUTO NACIONAL DE ESTUDOS E PESQUISAS EDUCACIONAIS ANÍSIO TEIXEIRA PORTARIA Nº 235, DE 2 DE JUNHO DE 2014 O Presidente do Instituto Nacional de Estudos e Pesquisas Educacionais
Fundamentos de Hardware
 Fundamentos de Hardware Curso Técnico em Informática SUMÁRIO PLACAS DE EXPANSÃO... 3 PLACAS DE VÍDEO... 3 Conectores de Vídeo... 4 PLACAS DE SOM... 6 Canais de Áudio... 7 Resolução das Placas de Som...
Fundamentos de Hardware Curso Técnico em Informática SUMÁRIO PLACAS DE EXPANSÃO... 3 PLACAS DE VÍDEO... 3 Conectores de Vídeo... 4 PLACAS DE SOM... 6 Canais de Áudio... 7 Resolução das Placas de Som...
2. ALGORITMOS. Unesp Campus de Guaratinguetá. Curso de Programação Computadores Prof. Aníbal Tavares Profa. Cassilda Ribeiro
 2. ALGORITMOS Unesp Campus de Guaratinguetá Curso de Programação Computadores Prof. Aníbal Tavares Profa. Cassilda Ribeiro 2 - Algoritmo 2.1: Introdução Antes de se utilizar uma linguagem de computador,
2. ALGORITMOS Unesp Campus de Guaratinguetá Curso de Programação Computadores Prof. Aníbal Tavares Profa. Cassilda Ribeiro 2 - Algoritmo 2.1: Introdução Antes de se utilizar uma linguagem de computador,
INTRODUÇÃO AO PLANO DE AULA DE ROBÓTICA USANDO O APLICATIVO DE PROGRAMAÇÃO EV3
 INTRODUÇÃO AO PLANO DE AULA DE ROBÓTICA USANDO O APLICATIVO DE PROGRAMAÇÃO EV3 LEGOeducation.com/MINDSTORMS πr Sumário Sumário Introdução aos planos de aula de robótica.... 3 Aula 1 - Construção e configuração....
INTRODUÇÃO AO PLANO DE AULA DE ROBÓTICA USANDO O APLICATIVO DE PROGRAMAÇÃO EV3 LEGOeducation.com/MINDSTORMS πr Sumário Sumário Introdução aos planos de aula de robótica.... 3 Aula 1 - Construção e configuração....
Entrada e Saída. Prof. Leonardo Barreto Campos 1
 Entrada e Saída Prof. Leonardo Barreto Campos 1 Sumário Introdução; Dispositivos Externos; E/S Programada; E/S Dirigida por Interrupção; Acesso Direto à Memória; Bibliografia. Prof. Leonardo Barreto Campos
Entrada e Saída Prof. Leonardo Barreto Campos 1 Sumário Introdução; Dispositivos Externos; E/S Programada; E/S Dirigida por Interrupção; Acesso Direto à Memória; Bibliografia. Prof. Leonardo Barreto Campos
Olimpíada Brasileira de Robótica 2008
 2008 Modalidade: Teórica Nível 2 (4º, 5º e 6º anos) Tempo de Duração: 2 horas ome do luno:... Matr:...... Escola:... Cidade:... Estado:...... Uma das 5 Olimpíadas Científicas com apoio financeiro do: Patrocinio:
2008 Modalidade: Teórica Nível 2 (4º, 5º e 6º anos) Tempo de Duração: 2 horas ome do luno:... Matr:...... Escola:... Cidade:... Estado:...... Uma das 5 Olimpíadas Científicas com apoio financeiro do: Patrocinio:
INFORMATIVO DE PRODUTO
 Sensor / Detector de Fumaça Óptico Endereçável 04 Níveis de Detecção Com Módulo Isolador - Código: AFS130IS. (Uso Conjunto às Centrais de Alarme da Série IRIS). O detector de fumaça código AFS130IS é um
Sensor / Detector de Fumaça Óptico Endereçável 04 Níveis de Detecção Com Módulo Isolador - Código: AFS130IS. (Uso Conjunto às Centrais de Alarme da Série IRIS). O detector de fumaça código AFS130IS é um
Passos do Procedimento
 Linha Tópico Produtos Objetivo Jato de Tinta Color Linha Inkjet DCP-165C / DCP-J125 Configurações necessárias após substituir a cabeça de impressão Passos do Procedimento [ 1 ] Atualizar as informações
Linha Tópico Produtos Objetivo Jato de Tinta Color Linha Inkjet DCP-165C / DCP-J125 Configurações necessárias após substituir a cabeça de impressão Passos do Procedimento [ 1 ] Atualizar as informações
5 Sistema Experimental
 5 Sistema Experimental Este capitulo apresenta o sistema experimental utilizado e é composto das seguintes seções: - 5.1 Robô ER1: Descreve o robô utilizado. É dividida nas seguintes subseções: - 5.1.1
5 Sistema Experimental Este capitulo apresenta o sistema experimental utilizado e é composto das seguintes seções: - 5.1 Robô ER1: Descreve o robô utilizado. É dividida nas seguintes subseções: - 5.1.1
5 Entrada e Saída de Dados:
 5 Entrada e Saída de Dados: 5.1 - Arquitetura de Entrada e Saída: O sistema de entrada e saída de dados é o responsável pela ligação do sistema computacional com o mundo externo. Através de dispositivos
5 Entrada e Saída de Dados: 5.1 - Arquitetura de Entrada e Saída: O sistema de entrada e saída de dados é o responsável pela ligação do sistema computacional com o mundo externo. Através de dispositivos
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
PLATAFORMA SISUAB TUTORIAL PARA COORDENADORES UAB. CGAAc CGPI
 PLATAFORMA SISUAB TUTORIAL PARA COORDENADORES UAB Coordenação Geral de Articulação Acadêmica CGAAc Coordenação Geral de Políticas e Tecnologia de Informação CGPI Diretoria de Educação a Distância DED Coordenação
PLATAFORMA SISUAB TUTORIAL PARA COORDENADORES UAB Coordenação Geral de Articulação Acadêmica CGAAc Coordenação Geral de Políticas e Tecnologia de Informação CGPI Diretoria de Educação a Distância DED Coordenação
Atualização do seu computador com Windows 8 da Philco para o Windows 8.1
 Atualização do seu computador com Windows 8 da Philco para o Windows 8.1 O Windows 8.1 foi concebido para ser uma atualização para o sistema operacional Windows 8. O processo de atualização mantém configurações
Atualização do seu computador com Windows 8 da Philco para o Windows 8.1 O Windows 8.1 foi concebido para ser uma atualização para o sistema operacional Windows 8. O processo de atualização mantém configurações
Mensagens De Erro. Versão: 1.0
 Mensagens De Erro Versão: 1.0 Tabela de Mensagens - EAGarçom MENSAGENS Possíveis Causas Possíveis Soluções Não foi possível atualizar. Dispositivo não conectado." - Erro no banco de dados do servidor;
Mensagens De Erro Versão: 1.0 Tabela de Mensagens - EAGarçom MENSAGENS Possíveis Causas Possíveis Soluções Não foi possível atualizar. Dispositivo não conectado." - Erro no banco de dados do servidor;