Mestrado em Modelagem Matemática. Ronei Osvaldo Ziech
|
|
|
- Giovanna Back Bayer
- 5 Há anos
- Visualizações:
Transcrição
1 UNIJUÍ - Universidade Regional do Noroeste do Estado do Rio Grande do Sul PROGRAMA DE PÓS-GRADUAÇÃO STRICTO SENSU EM MODELAGEM MATEMÁTICA Mestrado em Modelagem Matemática Ronei Osvaldo Ziech MODELAGEM MATEMÁTICA DA DINÂMICA DE UM SISTEMA DOSADOR DE ADUBO À TAXA VARIÁVEL COM ACIONAMENTO HIDRÁULICO Panambi RS, 2017
2 RONEI OSVALDO ZIECH MODELAGEM MATEMÁTICA DA DINÂMICA DE UM SISTEMA DOSADOR DE ADUBO À TAXA VARIÁVEL COM ACIONAMENTO HIDRÁULICO Dissertação de Mestrado apresentada à Unijuí como parte dos requisitos para a obtenção do grau de Mestre em Modelagem Matemática. Orientador: Antonio Carlos Valdiero, Dr. Eng. Co-Orientador: José Antonio Gonzalez da Silva, Dr. Agr. Panambi RS, 2017
3 UNIVERSIDADE REGIONAL DO NOROESTE DO ESTADO DO RIO GRANDE DO SUL UNIJUÍ DEPARTAMENTO DE CIÊNCIAS EXATAS E ENGENHARIAS DCEEng PROGRAMA DE PÓS-GRADUAÇÃO STRICTO SENSU EM MODELAGEM MATEMÁTICA MODELAGEM MATEMÁTICA DA DINÂMICA DE UM SISTEMA DOSADOR DE ADUBO À TAXA VARIÁVEL COM ACIONAMENTO HIDRÁULICO Elaborada por: Ronei Osvaldo Ziech Como requisito parcial para obtenção do grau de Mestre em Modelagem Matemática Comissão Examinadora Prof. Dr. Eng. Antonio Carlos Valdiero (Orientador) DCEEng/Unijuí Prof. Dr. Agr. José Antonio Gonzalez da Silva (Co-orientador) DEAg/Unijuí Prof. Dr. Eng. Leonardo Nabaes Romano DEM/UFSM Prof. Dr. Luiz Antônio Rasia DCEEng/Unijuí Panambi/RS, 07 de abril de 2017.
4 À minha Mãe que sempre incentivou nos momentos difíceis. À minha noiva, essa pessoa maravilhosa a quem devo tudo, em especial pela compreensão, apoio, convívio e incentivo constante.
5 AGRADECIMENTOS Agradeço a DEUS, pela vida e pela força presente para persistir e nunca desistir, pelos momentos felizes e por ter me iluminado em todos os períodos difíceis de minha vida. A minha mãe Marlice, que me ensinou a ser forte, que me ensinou a nunca abaixar a cabeça e sempre lutar. A ver o mundo com generosidade e humildade, que me ensinou a buscar a sabedoria. A minha noiva Rafaela pelo amor e confiança depositada em mim. Como é bom ter a sua companhia! Aos demais amigos e familiares que sempre estiveram presentes nos melhores e piores momentos, contribuindo para minha vida. Obrigado de coração! Ao colega e amigo Mauricio pela companhia no percurso acadêmico, compartilhando preocupações, aflições e muito trabalho. Quantas descobertas e conquistas durante esta caminhada! Ao meu orientador Prof. Dr. Antonio Carlos Valdiero, pelos ensinamentos, orientação, dedicação, compreensão e paciência nesta caminhada. Grande amigo e profissional! Aos professores e colegas do Mestrado e Doutorado, em especial Vania, Roberta, Marcia, Francisco e Paulo por terem propiciado a oportunidade de trocarmos experiências e auxiliar no crescimento profissional e pessoal. Ao casal Edeltraud e Elmar pelo acolhimento nestes anos em Panambi. Agradeço pelo carinho e companhia recebido na casa de vocês. À CNPq pelo apoio financeiro concedido na forma de bolsa e à Unijuí pela estrutura humana e recursos para a realização desta pesquisa, em especial ao Ivan, pela disposição e ajuda no laboratório e aos demais bolsistas do campus Panambi. À secretária, colegas e professores do mestrado e doutorado, bem como os professores e colegas da graduação, aos quais sou grato pela graça da amizade e constância da presença, estimulando e incentivando, contribuindo com a nossa formação humana e profissional.
6 A mente que se abre a uma nova ideia jamais voltará ao seu tamanho original. Albert Einstein
7 RESUMO Trata-se do estudo da dinâmica de um sistema dosador de adubo para semeadora-adubadora. Com este trabalho desenvolve-se um modelo matemático capaz de descrever o comportamento de um sistema de controle para adubação a taxa variável acionado hidraulicamente, voltado para aplicações na agricultura de precisão. Utilizando-se um modelo de dosador comercial de fertilizantes do tipo helicoidal por transbordo, que é muito comum nos equipamentos convencionais de adubação. A modelagem matemática é realizada por meio da técnica da caixa branca, que se baseia na utilização de princípios físicos para formulação do modelo. Após a formulação matemática e definição do modelo, utiliza-se uma bancada instrumentalizada de testes equipada com sensores de pressão e de deslocamento angular para aquisição de dados experimentais e ajuste dos parâmetros utilizados na modelagem matemática. O sistema de aquisição de sinais e controle é composto por uma placa dspace 1104 montada em um microcomputador. A partir dos dados experimentais, realizaram-se simulações computacionais para validar o modelo matemático de controle de adubação à taxa variável. Os resultados demonstram boa acurácia do modelo descrito, diante do controle preciso da velocidade angular, atendendo os objetivos propostos. Essa pesquisa tem o propósito de contribuir com a mecanização da agricultura de precisão de baixo custo e auxiliar no desenvolvimento de inovações tecnológicas que possibilitem produções limpas e sustentáveis. Palavras-chave: Agricultura de precisão; Adubação à taxa variável; Acionamento hidráulico; Modelagem Matemática.
8 ABSTRACT This is the study of the dynamics of a fertilizer metering system for sowing-fertilizer. This work develops a mathematical model capable of describing the behavior of a control system for hydraulically driven variable rate fertilization, aimed at applications in precision agriculture. By using a commercial fertilizer dosing model of the helical type by transshipment, which is very common in conventional fertilization equipment. Mathematical modeling is performed using the white box technique, which is based on the use of physical principles for model formulation. After the mathematical formulation and definition of the model, an instrumental zed test bench equipped with pressure and angular displacement sensors is used to acquire experimental data and adjust the parameters used in mathematical modeling. The signal acquisition and control system consists of a dspace 1104 board mounted on a microcomputer. From the experimental data, computational simulations were performed to validate the mathematical model of control of fertilization at the variable rate. The results demonstrate good accuracy of the described model, given the precise control of the angular velocity, meeting the proposed objectives. This research aims to contribute to the mechanization of low cost precision agriculture and help in the development of technological innovations that enable clean and sustainable production. Key-Words: Precision farming; Fertilization variable rate; Hydraulic actuation; Mathematical modeling.
9 LISTA DE FIGURAS Figura 1 Fotografia de um trator e semeadora-adubadora em trabalho de campo18 Figura 2- Diagrama esquemático da agricultura de precisão Figura 3 Exemplo de mapas de produtividade Figura 4 Exemplo de mapas de fertilidade Figura 5 - Esquema de sensoriamento e controle de uma semeadora-adubadora a taxa variável Figura 6 Desenho da bancada experimental de testes Figura 7 Componentes da bancada dosadora de adubo à taxa variável Figura 8 Dosador de adubo Fertisystem Figura 9 Exemplo dos passos de helicoides dosadores de adubo, (a), (b) e (c) de passo Figura 10 - Circuito hidráulico da bancada de testes representada de acordo com a norma ISO Figura 11 Circuito hidráulico proposto da bancada instrumentalizada representada de acordo com a norma ISO Figura 12 Descrição dos componentes do sistema de acionamento Figura 13 Desenho da bancada instrumentalizada com a transmissão por correia Figura 14 Motor hidrostático Figura 15 - Válvula hidráulica de controle direcional de 4 vias e 3 posições, centro fechado, centrada por molas e acionada por solenoides Figura 16 Fotografia da Unidade de Potência e Condicionamento Hidráulico (UPCH) Figura 17 - Sistema de controle da bancada instrumentalizada Figura 18 Representação de funcionamento de um encoder Figura 19 Transdutor de pressão eletrônico com saída analógica integrada Figura 20 Equipamentos utilizados na bancada instrumentalizada para testes Figura 21 - Fonte geradora de tensão Figura 22 - Fonte geradora de tensão HP 24 VDC Figura 23 Ligações e chave eletrônica Figura 24 dspace com os cabos de controle das variáveis... 50
10 Figura 25 dspace com placa de aquisição de sinais de controle Figura 26 Bancada instrumentalizada para testes experimentais Figura 27 - Desenho esquemático para a modelagem do sistema de adubação à taxa variável com acionamento hidráulico Figura 28 - Desenho do dosador helicoidal de fertilizantes por transbordo da marca FertiSystem e seu diagrama de corpo livre Figura 29 Gráfico com a combinação das características do atrito em regime permanente Figura 30 Sistema de controle em malha aberta Figura 31 Realização dos testes experimentais Figura 32 Inclinação longitudinal e reservatório de adubo completo Figura 33 Gráfico para a captura do coeficiente angular Figura 34 Gráfico comparativo do comportamento do atrito em regime permanente Figura 35 Gráficos com os ajustes do atrito: (a) VAZIO, (b) CHEIO Figura 36 Eixo do dosador de adubo e polia de acionamento para a determinação do momento de inércia Figura 37 Determinação do momento de inércia Figura 38 A: procedimento para mensuração da velocidade angular; B: Tacômetro foto/contato digital Figura 39 - Gráfico do deslocamento angular no eixo de acionamento da adubadora Figura 40 Gráfico do monitoramento da pressão de carga do motor hidráulico Figura 41 Diagrama de blocos do modelo matemático da dinâmica de um sistema dosador de adubo à taxa variável com acionamento hidráulico Figura 42 Diagrama de Blocos do Modelo de Atrito Dinâmico Figura 43 Gráfico do deslocamento angular para validação do Modelo Matemático utilizando os dados experimentais do teste Figura 44 Gráfico da velocidade angular no eixo da dosadora para validação do Modelo Matemático utilizando os dados experimentais do teste Figura 45 - Gráfico do deslocamento angular para validação do Modelo Matemático utilizando os dados experimentais do teste Figura 46 - Gráfico da velocidade angular no eixo da dosadora para validação do Modelo Matemático utilizando os dados experimentais do teste
11 Figura 47 - Gráfico do deslocamento angular para validação do Modelo Matemático utilizando os dados experimentais do teste Figura 48 - Gráfico da velocidade angular no eixo da dosadora para validação do Modelo Matemático utilizando os dados experimentais do teste
12 LISTA DE TABELAS Tabela 1 - Detalhamento das semeadoras-adubadoras comercializadas no mercado nacional Tabela 2 - Lista de materiais Tabela 3 Especificações técnicas do motor hidrostático Tabela 4. Especificações técnicas do encoder incremental Tabela 5 Especificações técnicas do transdutor de pressão eletrônico Tabela 6 - Descrição dos Parâmetros e Variáveis Utilizados na Modelagem Matemática Tabela 7 Valores da relação entre tempo e quantidade de adubo dosada e da constante de vazão mássica Tabela 8 Dados Experimentais em regime permanente Tabela 9 Parâmetros utilizado no mapa de atrito estático Tabela 10 Parâmetros característicos do modelo de atrito Tabela 11 Parâmetros do consumo da potência e do torque hidráulico... 78
13 LISTA DE SÍMBOLOS Letras Gregas Ângulo de deslocamento angular no motor Deslocamento angular na dosadora Velocidade no eixo Aceleração angular Velocidade angular Velocidade angular no eixo do motor Velocidade angular no eixo da dosadora Velocidade angular em regime permanente Aceleração angular (rotação) Velocidade de stribeck Coeficiente de amortecimento viscoco Letras Latinas Coeficiente de atrito viscos Constante de vazão mássica Deslocamento volumétrico Momento de inércia Pressão de carga Potência hidráulica Potência hidráulica em regime permanente Quantidade de adubo dosada Vazão volumétrica Vazão volumétrica em regime permanente Torque no eixo da dosadora Torque de atrito Torque de atrito de Coulomb Torque motor Torque de atrito estático
14 SUMÁRIO 1 INTRODUÇÃO GENERALIDADES OBJETIVOS E O PROBLEMA PROPOSTO METODOLOGIA UTILIZADA ORGANIZAÇÃO DO TRABALHO REVISÃO BIBLIOGRÁFICA Agricultura de Precisão Sistema de Posicionamento Global e os Mapas de Variabilidade Adubação e Tecnologias de Aplicação à Taxa Variável Descrição e análise das necessidades das semeadoras-adubadoras DESCRIÇÃO DA BANCADA EXPERIMENTAL DE TESTES SISTEMA DOSADOR DE ADUBO À TAXA VARIÁVEL ACIONAMENTO HIDRÁULICO SISTEMA DE CONTROLE E INSTRUMENTALIZAÇÃO DESCRIÇÃO DO PROTÓTIPO DA BANCADA EXPERIMENTAL E SEU FUNCIONAMENTO DISCUSSÃO MODELAGEM MATEMÁTICA INTRODUÇÃO CONDIÇÕES PARA A MODELAGEM MATEMÁTICA MODELAGEM MATEMÁTICA DA DINÂMICA DO EIXO DE UM SISTEMA DOSADOR DE ADUBO À TAXA VARIÁVEL MODELAGEM MATEMÁTICA DO SISTEMA DE ACIONAMENTO HIDRÁULICO MODELAGEM DA DINÂMICA DO ATRITO DISCUSSÃO RESULTADOS INTRODUÇÃO DETERMINAÇÃO EXPERIMENTAL DO COEFICIENTE DE VAZÃO MÁSSICA IDENTIFICAÇÃO EXPERIMENTAL DOS PARÂMETROS DO ATRITO DETERMINAÇÃO DO MOMENTO DE INÉRCIA TESTES EXPERIMENTAIS EM MALHA ABERTA IMPLEMENTAÇÃO COMPUTACIONAL DO MODELO MATEMÁTICO SIMULAÇÕES COMPUTACIONAIS E VALIDAÇÃO DO MODELO MATEMÁTICO DISCUSSÃO... 86
15 5 CONCLUSÕES E PERSPECTIVAS FUTURAS REFERÊNCIAS BIBLIOGRÁFICAS APÊNDICE A PROGRAMA PARA PROCESSAMENTO DOS TESTES EXPERIMENTAIS E DETERMINAÇÃO DO COEFICIENTE DE VAZÃO MÁSSICA APÊNDICE B PROGRAMA PARA AJUSTE DA CURVA DE ATRITO AO MAPA ESTÁTICO DE ATRITO APÊNDICE C PROGRAMA PARA PROCESSAMENTO DOS TESTES EXPERIMENTAIS EM BANCADA INSTRUMENTALIZADA APÊNDICE D PROGRAMA GERADOR DE DADOS PARA SIMULAÇÃO COMPUTACIONAL ANEXO A CATÁLOGO DO MOTOR HI DRÁULICO ANEXO B CATÁLOGO DAS VÁLVULAS ANEXO C - CATÁLOGO DO ENCODER ANEXO D CATÁLOGO DO TRANSDUTOR DE PRESSÃO ELETRÔNICO...113
16 16 1 INTRODUÇÃO 1.1 Generalidades Estudiosos de diferentes campos da ciência dedicam-se aos problemas relacionados ao crescimento populacional e seus reflexos. Pesquisas apontam que a humanidade vem consumindo mais do que a natureza consegue repor. A longevidade e as altas taxas de natalidade em países subdesenvolvidos são apontadas como razões para explicar esse fenômeno (FONTANA et al., 2015). Neste cenário, a demanda por alimentos será superior àquilo que pode ser cultivado. Diante dessa realidade, o principal desafio para os pesquisadores na agricultura é a produção de conhecimentos para assegurar sustentabilidade econômica, a preservação do meio ambiente e a produção de alimentos a todos. Nessa perspectiva, é imprescindível alcançar maiores níveis de produtividade por meio de inovações tecnológicas, perante de uma agricultura que garanta um desenvolvimento justo e sustentável, respeitando os limites ecológicos e garantindo a sustentabilidade social e ambiental. Atualmente, a agricultura de precisão é um exemplo de avanço na administração e gerenciamento das propriedades rurais. Trata-se de métodos de otimização agrícola para elevar a produção e reduzir os custos da lavoura diante de tratamentos individualizados do solo. Neste sentindo, existem algumas tecnologias que potencializam o desenvolvimento dessa filosofia de trabalho como: os microprocessadores e os aparelhos de posicionamento global por satélite (GPS), que acoplados a colhedoras, semeadoras-adubadoras e outros implementos agrícolas, permitem o levantamento e análise de dados para a aplicação de insumos à taxa variável (UMEZU, 2003). A evolução na agricultura e a necessidade de aumentar a produção de forma sustentável, principalmente em relação à preservação do meio ambiente, são requisitos para a agricultura de precisão, que tem como objetivo a maximização da produção com o menor uso de insumo possível (MOLIN et al., 2015). Necessita-se salientar, entretanto, que para a aplicação correta e eficiente desses insumos exige-se, inicialmente, um diagnóstico dos possíveis problemas de
17 17 fertilidade do solo e nutrição das plantas antes da utilização da adubação. O uso racional é realizado com a regulagem e a operação adequada dos equipamentos para aplicação desses insumos, de forma a aplicá-los na quantidade essencial e no local adequado. Assim, buscando-se a aplicação necessária de acordo com as funções ecológicas prejudicadas, visando à economia e o menor impacto ambiental possível. Machado et al. (2015a) destaca que na agricultura de precisão já se tem um avanço na elaboração de mapas de variabilidade do solo, mapas de produtividade, mapas de aplicação e no Sistema de Posicionamento Global (GPS), sendo que o desafio atual é a precisão das máquinas de aplicação de adubo à taxa variável. Desta maneira, esta pesquisa desenvolveu um modelo matemático que descreve o comportamento dinâmico de um sistema de controle para adubação a taxa variável com acionado hidraulicamente, voltado para aplicações na agricultura de precisão. 1.2 Objetivos e o problema proposto Esta pesquisa do Mestrado em Modelagem Matemática faz parte da linha de pesquisa Modelagem Computacional, Otimização e Controle de Sistemas e os objetivos foram definidos com o propósito de alcançar aspectos diferenciais em relação à literatura especializada (CARNEIRO et al., 2017, REYNALDO e GAMERO, 2015; MACHADO, 2015a; MOLIN, 2015; UHRY, 2013; GARCIA, 2011; YU, 2006, UMEZU, 2003;), destacando-se principalmente os seguintes: Realizar a revisão bibliográfica na literatura sobre a agricultura de precisão e adubação à taxa variável; Desenvolver um modelo matemático dinâmico que represente o comportamento de um sistema de aplicação de fertilizantes à taxa variável, acionado hidraulicamente; Realizar testes em bancada experimental e simular diferentes situações de dosagem para a definição dos parâmetros envolvidos e validação do modelo matemático de controle do sistema dosador de adubo à taxa variável;

18 18 Executar a simulação computacional e a validação experimental do modelo matemático; Contribuir para a mecanização da agricultura de precisão de baixo custo e auxiliar no desenvolvimento de inovações tecnológicas que possibilitem produções limpas e sustentáveis. Portanto, tem-se como contribuição principal deste trabalho a modelagem matemática da dinâmica de um sistema dosador de adubo para auxílio no desenvolvimento de metodologias e estratégias de controle de dosagem de adubo à taxa variável. A Figura 1 está apresentando uma semeadora-adubadora executando tarefas em campo. Figura 1 Fotografia de um trator e semeadora-adubadora em trabalho de campo Fonte: VENCE TUDO (2016) Na seção seguinte apresentam-se alguns termos e conceitos específicos relacionados à pesquisa, justificando as contribuições da modelagem matemática para a adubação à taxa variável e para a agricultura de precisão. Além disso, são descritas as referências bibliográficas que forneceram subsídios teóricos e auxiliaram os trabalhos relacionados à pesquisa.
19 Metodologia utilizada A metodologia utilizada para a realização da pesquisa é baseada em uma revisão bibliográfica e na identificação do problema relacionado à precisão das semeadoras-adubadoras. A partir da identificação do problema, buscou-se selecionar as variáveis do sistema definindo-se formas de controle, observando-se os efeitos causados por cada variável para a elaboração da modelagem matemática. Em relação à modelagem matemática, optou-se pela técnica da caixa branca, a qual se baseia na utilização de princípios físicos para explicar a natureza do sistema e demonstrar a influência dos parâmetros no processo. Após a formulação matemática e definição do modelo, uma bancada instrumentalizada de testes equipada com sensores de pressão e de deslocamento angular foi utilizada para aquisição de dados experimentais e ajuste dos parâmetros utilizados na modelagem matemática. A partir dos dados experimentais, simulações matemáticas foram realizadas para validar o modelo que descreve o comportamento de um sistema de controle para adubação à taxa variável acionado hidraulicamente, voltado para aplicações na agricultura de precisão. Para simular situações que se assemelham a operações reais de adubação em campo, utilizou-se o fertilizante sólido NPK para os testes realizados na bancada instrumentalizada, devido sua ampla utilização em culturas produtoras de grãos. Esse tipo de fertilizante sólido possui o formato granulado e apresenta baixa umidade. Característica que é a principal responsável pelo empedramento, que é a cimentação das partículas do fertilizante formando uma massa de dimensões muito maiores que a das partículas originais (ALCARDE; GUIDOLIN; LOPES, 1998), que ocorre em temperaturas elevadas ou baixa umidade do ar, o que pode ocasionar dificuldades de manuseio e de aplicação. A partir dos dados experimentais, estimou-se e ajustou-se o valor dos parâmetros utilizados no modelo matemático, incluindo-se a não linearidade do atrito. Por meio das simulações computacionais analisou-se o comportamento de situações que se assemelham a operações reais em campo para validar o modelo 1 NPK = sigla utilizada em estudos de agricultura, que designa a relação dos três nutrientes principais para as plantas (nitrogênio, fósforo e potássio), também chamados de macronutrientes, na composição de um fertilizante.
20 20 matemático de controle de adubação à taxa variável, considerando-se as características dinâmicas do atrito. As simulações computacionais foram realizadas no software MatLab e, em especial, da plataforma Simulink. A bancada com os cinco dosadores foi conectada a uma placa alemã dspace DS 1104, integrada a um microcomputador. Para o funcionamento da bancada utilizou-se da infraestrutura e dos recursos humanos disponível no Núcleo de Inovação em Máquinas Automáticas e Servo Sistemas (NIMASS, credenciado pela Agência Nacional de Petróleo _ ANP em 13 de outubro de 2014, portaria no do D.O.U) da Unijuí Campus Panambi, bem como dos demais Laboratórios vinculados e da Biblioteca. O NIMASS foi implantado com recursos financeiros do FINEP/SEBRAE/MCT e modernizado com apoio de um projeto no âmbito do Programa de P&D da ANEEL). Esta pesquisa conta com apoio de bolsas de iniciação científica da Fundação de Amparo à Pesquisa do Rio Grande do Sul (FAPERGS) e do Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq), bem como da Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES). O CNPq, também forneceu auxílio financeiro por meio de bolsa de mestrado. Além da modelagem matemática foram realizados testes para relacionar a velocidade angular com a quantidade de adubo dosada. Utilizando a relação entre a velocidade angular e a quantidade de adubo dosada para captura da constante de adubação. Abordou-se também a dinâmica do dosador de adubo da semeadoraadubadora para estudo dos comportamentos e a ação das forças que produzem ou modificam os movimentos, como a potência e o torque hidráulico. Para isso, utilizouse de equações que serão melhores detalhadas na seção 3. Com base nos objetivos, esta pesquisa se classifica enquanto pesquisa descritiva e exploratória e em relação ao seu modelo conceitual e operativo enquanto bibliográfica e experimental. Os dados foram obtidos de forma direta extensiva com categorias emergentes e analisados quantitativa e qualitativamente, tomando como base a revisão de literatura e a prática experimental.
21 Organização do trabalho Está dissertação está organizada em quatro capítulos. O primeiro capítulo é dedicado a uma revisão bibliográfica do tema, descrevendo algumas pesquisas relacionadas ao tema de estudo, além dos objetivos e a metodologia utilizada. No capítulo 2, é apresentada a bancada instrumentalizada de testes experimentais com acionamento hidráulico. A modelagem matemática do eixo da dosadora de adubo, das não linearidades e da cinemática é apresentada no capítulo 3. O capítulo 4 traz os resultados dos testes experimentais em malha aberta e a validação do modelo matemático. Por fim, têm-se as conclusões e as perspectivas para a continuidade desta pesquisa, as referências utilizadas, os apêndices e os anexos.
22 Revisão bibliográfica Nesta seção apresenta-se uma revisão bibliográfica relacionada ao tema do trabalho baseada na literatura científica clássica (livros) e em artigos científicos publicados em eventos e periódicos. Além de abordar os trabalhos que nortearam os rumos da pesquisa, neste capítulo apresentam-se as tecnologias e as particularidades dos equipamentos que auxiliaram no desenvolvimento do projeto e os principais conceitos metodológicos referentes à agricultura de precisão Agricultura de Precisão A transformação agrícola é resultado dos avanços tecnológicos e do conhecimento acumulado no decorrer da história. A busca constante pelo aumento do lucro e da produtividade proporcionou maior cuidado no manejo das lavouras, pastos e pomares em virtude das diferenças internas das áreas. Para essa metodologia de trabalho e gerenciamento agrícola deu-se o nome de agricultura de precisão (BALBINO et al., 2011). Alguns relatos sobre a utilização da agricultura de precisão ocorreram em 1980, quando foram gerados os primeiros mapas de produtividade na Europa. No mesmo ano, nos Estados Unidos foram realizadas as primeiras adubações com doses variadas. Em Minnesota (EUA), pesquisadores chamavam a atenção para a grande variabilidade espacial nas lavouras, devido à própria formação dos solos ou resultado das interferências do homem (MOLIN et al., 2015). As primeiras atividades ligadas à agricultura de precisão no Brasil ocorreram na década de 1990, diante da importação de colhedoras equipadas com monitor de produtividade de grãos. A aplicação de fertilizantes em taxa variáveis passou a ser praticada no país no final da década de 90. A partir dos anos 2000, surgiram as primeiras máquinas aplicadoras à taxa variável no país. Outro fato que auxiliou na difusão da agricultura de precisão foi que em 1996 houve o primeiro simpósio sobre o assunto na Universidade Federal de São Paulo (USP). Já em 2004, na USP, houve o primeiro congresso Brasileiro de Agricultura de Precisão (COnBAP).
, agricultura de precisão é uma prática agrícola na qual utiliza-se tecnologia de informação baseado no princípio da variabilidade do solo e do clima.")
23 23 Para Schueller (1992), essa filosofia de trabalho pode ser entendida através do cuidado detalhado do solo e da cultura considerando as diferenças da lavoura, reduzindo os custos da produção e os impactos ambientais. Segundo Stara (2016a), agricultura de precisão é uma prática agrícola na qual utiliza-se tecnologia de informação baseado no princípio da variabilidade do solo e do clima. Diversas ações são necessárias para a implementação dessa metodologia de gerência agrícola. Dentre essas ações, inicia-se com a análise e preparo do solo, realizando-se uma coleta de amostras para identificar a estrutura do solo e da camada compactada, para verificar os atributos do solo (ph, nutrientes, matéria orgânica, etc.) e sua devida correção; até a etapa que trata-se da colheita com máquinas e sensores de produtividade e geração de mapas de produtividade, como monstra a Figura 2. Figura 2- Diagrama esquemático da agricultura de precisão Fonte: Arvus Tecnologia (2016) A agricultura de precisão, para Sulzbach (2003), pode ser definida como um conjunto de tomadas de decisões no sistema produtivo, dividido em três etapas: colheita e geração de mapas de produtividade, análise e avaliação do mapa de
24 24 produtividade e, geração e execução de mapas de aplicação de taxa variável para o preparo do solo, plantio, adubação e pulverização. Para Molin e Mazzotti (2000), a operação de distribuição do produto deve ser uniforme, se isso não acontecer de nada adianta a correta seleção de insumos e fertilizantes. Para a agricultura de precisão é indispensável à identificação da ocorrência da variação de produtividade dentro de uma área de cultivo. Para isso o produtor deve identificar as causas e a melhor estratégia de manejo para cada ponto 2 da propriedade, já que o solo deve ser monitorado continuamente ao longo do tempo, evitando a aplicação de fertilizantes e corretivos agrícolas superdimensionados (LOPEZ e GUILHERME, 1998). Em consequência das necessidades apresentadas, a seção seguinte apresenta o sistema de posicional global e os mapas de variabilidade Sistema de Posicionamento Global e os Mapas de Variabilidade O sistema de posicionamento global (GPS 3 ), desenvolvido pelos militares dos Estados Unidos durante a década de 70 com o objetivo de fornecer a correta localização de suas tropas em todo o planeta, hoje é indispensável para a prática da agricultura de precisão e diversas aplicações civis (SANTOS e NELSI, 2006). À medida que as operações agrícolas foram avançando à busca da uniformidade das lavouras, fazendo com que manchas fossem abolidas e fosse possível nivelar os talhões pelas altas produtividades e a aplicação de insumos às taxas variadas para cada metro da lavoura (MOLIN, 2008), os sistemas de navegação com um receptor de GPS são utilizados para gerenciar as aplicações e orientar os veículos agrícolas no campo. Como o GPS é um sistema de satélite, ele não necessita de internet e permite que locais com grande dificuldade de comunicação, realizem o mapeamento de seu espaço. Ainda, pode-se utilizar esse sistema para trabalhar em condições de baixa visibilidade no campo, como no caso de chuva, poeira, nevoeiro e escuridão (FLORES, 2010). 2 Entende-se por ponto da propriedade uma determinada área especifica de cultivo conhecida também por talhão (MOLIN et al., 2015). 3 GPS: Global Positioning System.
25 25 Neste viés, o GPS possibilitou o avanço da agricultura de precisão para grandes áreas de cultivo, modificando as técnicas de cultivo e incorporando novas ferramentas para o agricultor utilizar (PATERNIANI, 2001). No intuito de potencializar o controle da variabilidade, essa tecnologia auxilia na manipulação e análise de uma grande quantidade de dados geoespaciais. O grande desafio para potencializar a produção agrícola é o controle da variabilidade espacial. As práticas da agricultura de precisão estão diretamente ligados aos dados disponíveis e coletados, quanto mais detalhados as informações, mais preciso é o controle da variabilidade. Segundo Cassia et al. (2015), as técnicas de agricultura moderna se diferenciam dos conceitos tradicionais devido seu nível de gerenciamento, nos quais as informações adquiridas permitem, aos produtores, identificar melhores estratégias gerando maior eficiência operacional. O planejamento é tarefa fundamental e imprescindível para o uso da terra. Dentro deste contexto, os mapas de geoprocessamento contribuem para um planejamento rural adequado, pois abrangem um conjunto de procedimentos (análise do solo, tipo de solo, nutrientes, entre outros), manipulação e análise de dados espacialmente referenciados (BOLFE; PEREIRA e MADRUGA, 2004). A variabilidade presente nas lavouras, comprovada nos mapas de produtividade, como exemplificado na Figura 3, resulta nas ações que devem ser tomadas para maximizar a produção e reduzir os custos através da aplicação de insumos à taxa variável de acordo com a necessidade de cada ponto da propriedade. Na Figura 3 os tons de azul indicam menor produtividade enquanto os tons de vermelho indicam maior produtividade.

26 26 Figura 3 Exemplo de mapas de produtividade Fonte: SUDDUTH (1999), apud UMEZU (2003) A geração dos mapas de produção que geralmente são obtidos através das máquinas colhedoras equipadas com sensores que fazem a medição do fluxo de massa e teor da umidade dos grãos, só é possível através da utilização do sistema de posicionamento em campo que realiza o mapeamento da área de cultivo indicando a produção em cada ponto da propriedade. Através do emprego de monitores nas máquinas agrícolas, essas informações de grande relevância e utilidade são extraídas para o gerenciamento agrícola em operações específicas, como a colheita (COMPAGNON et al., 2012). Assim, permitindo a observação quanto à variabilidade do processo e o gerenciamento das variáveis agrícolas para uma próxima safra. Nesta perspectiva, a coleta de informações sobre a produtividade combinadas com as informações dos mapas de fertilidade do solo, Figura 4, permite um planejamento adequado para a construção do mapa de aplicação de fertilizantes à taxa variável. A Figura apresenta exemplos de mapas de solo para concentração de fósforo, potássio e níveis de ph, onde os tons de azul indicam menor concentração de nutrientes e os tons em vermelho maior concentração de nutrientes.

27 27 Figura 4 Exemplo de mapas de fertilidade Fonte: SUDDUTH (1999), apud UMEZU (2003) Espera-se que os mapas de aplicação auxiliem na preservação dos recursos naturais através do uso racional de insumos com o auxilio de ferramentas computacionais que permitam a interface das informações coletadas com as máquinas de aplicação, tendo como objetivo principal a precisão das dosagens de acordo com a necessidade localizada Adubação e Tecnologias de Aplicação à Taxa Variável A adubação é fundamental para o desenvolvimento vegetativo e produtivo nas lavouras. Diante desse contexto, diversas pesquisas buscam o aperfeiçoamento da adubação à taxa variável com diferentes tecnologias. No mercado nacional a tecnologia de dosagem de fertilizante a taxa variável é aplicado em marcas como John Deere (John Deere, 2015), Stara (Stara, 2016a) (Stara, 2016b) (Stara, 2016c), Vence Tudo (Vence Tudo, 2016a) (Vence Tudo, 2016b), Semeato (Semeato, 2016) e Massey Ferguson (Massey Ferguson, 2016).
28 28 Na Tabela 1 apresentam-se os detalhes dos sistemas da dosagem de fertilizante relacionados a essas marcas. Tabela 1 - Detalhamento das semeadoras-adubadoras comercializadas no mercado nacional Marca Modelo Dosador Acionamento Nº de linhas John Deere Séria 2100 ProMeter Hidráulico 13 a 34 Stara Prima e Ceres Super Fertisystem Hidráulico 44 a 56 Stara Victória Fertisystem Hidráulico 05 a 13 Stara Victória TOP RD e RD Fertisystem Hidráulico 11 a 17 Vence Tudo Macanuda Fertilizante Fertisystem Hidráulico 24 Vence Tudo Panther Precision Fertisystem Hidráulico 06 a 15 Semeato Sol Tower Semeato Hidráulico 07 a 15 Massey Ferguson MF 700 CFS Fertisystem Hidráulico 11 a 30 Fonte: adaptado de Mantovani (2016) Com os resultados da pesquisa no mercado, destacam-se dois fatores importantes: o grande uso do dosador Fertisystem (praticamente em todos os sistemas de dosagem) e todos usam o acionamento hidráulico não individual por linha. Em apenas nas semeadoras-adubadoras da Sol Tower da Semeato e Séria 2100 da John Deere que esse modelo de dosador helicoidal por transbordo não é utilizado. Além da pesquisa de mercado, também se buscou em trabalhos acadêmicos as propostas e tecnologias relacionadas à adubação à taxa variável. Dentro deste cenário, Martins (1999) realizou o desenvolvimento de um dosador helicoidal utilizado por uma máquina do tipo semeadora-adubadora à taxa variável para avaliação da rotação e vazão em diferentes níveis com diferentes matérias-primas. Utilizando uma bancada de testes equipado com sensores de vazão e peso foi constatado que o dosador apresenta melhor uniformidade operando em vazões mais elevadas. Já Umezu (2003) trabalhou com um sistema de controle de um equipamento de formulação, dosagem e aplicação de fertilizantes sólidos no sulco, a taxas variáveis. Os dispositivos dosadores foram acionados por motores hidráulicos com velocidades angulares controladas por servo- válvulas, compensadas à pressão. Por
29 29 meio de um GPS para fornecer a posição do equipamento e um sistema geral de controle responsável em interpretar um mapa de aplicação e comandar os dosadores de acordo com a posição geo-referenciada e com a velocidade de deslocamento do equipamento. Testes em laboratório foram realizados para avaliar a faixa de variação e a precisão da rotação em cada um dos motores, a rapidez para a obtenção da rotação desejada e ainda a potência disponível para o acionamento dos dosadores. Garcia (2011) desenvolveu um sistema de controle fuzzy, em malha fechada, da taxa de aplicação de fertilizante. Para isso, desenvolveu um modelo matemático que representa o comportamento do mecanismo dosador, um sensor para medir o fluxo de fertilizante e, por fim, o projeto de um controlador do tipo fuzzy para controle da taxa de aplicação de fertilizante. Utilizando um motor elétrico o autor utilizou a tensão de excitação como variável manipulada e as variáveis de entrada foram: o erro e o desvio da taxa de aplicação atual e a taxa requerida, além da velocidade e do desvio da velocidade de deslocamento do equipamento. Uhry (2013) realizou uma avaliação de um conjunto trator semeadora com sistema de taxa variável com três diferentes velocidades de deslocamento. Também realizou um estudo sobre a interferência do relevo para a utilização de sementes à taxa variável na produção de soja. O autor concluiu que a produtividade de grãos diferiu estatisticamente entre os locais do relevo. Diante dos resultados dos experimentos, o relevo póde ser usado como fator na tomada de decisão, referente ao uso da taxa variável, na semeadura de soja. Machado et al. (2015b) analisaram a acurácia e o tempo de reposta em máquinas de aplicação à taxa variada. No estudo, os autores constataram que os níveis de desempenho obtidos eram preocupantes, com reprovação de 59% dos equipamentos para tempos de resposta e 53% para acurácia. Evidenciando assim que as máquinas podem comprometer severamente o manejo localizado e os resultados da agricultura de precisão à taxa variável. Carneiro et al. (2017) avaliaram a qualidade da adubação mecanizada individualizada de NPK por meio do Controle Estatístico de Qualidade, com o monitoramento da adubação mecanizada individualizada de NPK em 30 pontos amostrais. O mecanismo dosador helicoidal foi uma das causas especiais que afetou a qualidade operacional, pois não foi eficiente na distribuição. Os autores concluíram que a qualidade da adubação individualizada de fertilizante aplicou a dosagem
30 30 acima da recomendada para todos os fertilizantes, devido à regulagem e o mecanismo dosador helicoidal. O nitrogênio (ureia protegida) apresentou maior variabilidade de distribuição enquanto o fósforo (MAP) apresentou a melhor qualidade operacional devido a menor quantidade recomendada Descrição e análise das necessidades das semeadoras-adubadoras A agricultura no Brasil sofreu profundas transformações desde a década de 1960, principalmente em relação à tecnologia utilizada no setor. Diante deste cenário, é possível perceber a profissionalização do produtor e a utilização de um nível tecnológico maior, como: sementes melhoradas, fertilizantes, análise e correção do solo, plantio direto, máquinas e implementos agrícolas que utilizam sensores e aparelhos de posicionamento global (GPS) para levantamento de dados e aplicação de insumos à taxa variável (UMEZU, 2003). O desempenho da agricultura tem alcançado expressivos resultados nos últimos anos, colocando o país entre os principais produtores de grãos do mundo. Na safra 2015/2016, a produção brasileira alcançou 186,4 milhões de toneladas de grãos. O volume é 10,3% menor que a safra passada, com uma redução de 19,19 milhões de toneladas. A área plantada, nesta safra, ficou em torno de 58,15 milhões de hectares, crescimento previsto de 0,4% se comparada com a safra 2014/2015 (57,93 milhões de hectares), segundo estudos da Companhia Nacional de Abastecimento (CONAB, 2015). A agricultura de precisão, em especial, trouxe importantes contribuições para o aprimoramento dos sistemas agrícolas, produzindo novos níveis de eficiência nos aspectos quantitativos e qualitativos. A evolução da produção agrícola brasileira nos últimos vinte anos foi de 1945 kg.ha - ¹ para 3406 kg.ha - ¹ de acordo com os dados da Ecoagro (2016) 4. Com os avanços do plantio direto no Brasil, as semeadoras-adubadoras de precisão têm dominado o mercado de implementos agrícolas devido à vantagem da adubação simultânea à implantação da cultura. Também conhecida como adubação de semeadura, as semeadoras-adubadoras buscam um desenvolvimento 4 Ecoagro: Empresa de Consultoria em Agronegócios.
31 31 sustentável nas lavouras através da correta adição de sementes e adubo ao solo, sem o revolvimento do solo e procurando manter a maior quantidade de cobertura vegetal. Nas semeadoras-adubadoras, tradicionalmente, o acionamento do mecanismo dosador é realizado através de ligação mecânica com a roda da semeadora. Já nos implementos agrícolas com sistema de taxa variável, o acionamento é realizado por um motor hidráulico, no qual a bomba hidráulica é acionada pela tomada de potência, ou diretamente pelo sistema hidráulico do trator. Através de um aplicativo (software), uma central é responsável em controlar a vazão de uma ou mais bombas hidráulicas, variando a quantidade de sementes e adubo(s) que são depositadas no solo, de acordo com taxas pré-fixadas, ou seguindo mapas de aplicação referenciados por GPS (UHRY, 2013). Neste contexto, a aplicação localizada de insumos é gerenciada por meio de um mapa que determina a variabilidade do solo. Em seguida, o campo é divido em celas ou pontos e a dosagem é definida por meio da necessidade de cada ponto, gerando o mapa de aplicação. As coordenadas do campo e as doses de aplicação são arquivadas na memória de controle que comanda o atuador e ajusta o mecanismo dosador responsável pela aplicação em cada local no campo (MOLIN, 2015), como demonstrado na Figura 5.
 Como o sensoriamento e a aplicação de insumos ocorrem simultaneamente, o processo deve ser rápido e preciso para garantir que a dose correta seja aplicada no local certo.")
32 32 Figura 5 - Esquema de sensoriamento e controle de uma semeadora-adubadora a taxa variável Fonte: Ziech et al. (2015) Como o sensoriamento e a aplicação de insumos ocorrem simultaneamente, o processo deve ser rápido e preciso para garantir que a dose correta seja aplicada no local certo. Para a realização da pesquisa algumas particularidades foram consideradas, entre elas as velocidades utilizadas para os testes experimentais em laborátorio foram baseadas de acordo com as tabelas de recomendação de corretivos e fertilizantes da EMBRAPA 5 (2015; CQFS/RS SC, 2004). Considerando-se assim a quantidade mínima e máxima de adubação em cada local predeterminado pelo mapa de aplicação de fertilizantes. 5 EMBRAPA: Empresa Brasileira de Pesquisa Agropecuária

33 33 2 DESCRIÇÃO DA BANCADA EXPERIMENTAL DE TESTES Neste capítulo, apresenta-se a descrição da bancada instrumentalizada para testes de um sistema dosador de adubo à taxa variável com acionamento hidráulico. Os componentes utilizados para o projeto e, consequentemente, para a construção desta bancada foram disponibilizados pelo Núcleo de Inovação em Máquinas Automáticas e Servo Sistemas (NIMASS/ UNIJUÍ Campus Panambi, credenciado pela Agência Nacional de Petróleo _ ANP em 13 de outubro de 2014, portaria no do D.O.U), exceto a estrutura com os cinco dosadores de adubo, a qual foi concebida na empresa Imasa. A seguir é descrito as características de cada um dos elementos e seu funcionamento na bancada de testes experimentais. A bancada, ilustrada na Figura 6, é composta por três sistemas: sistema de controle, sistema de acionamento e o sistema dosador de adubo à taxa variável. Na Figura 6 mostram-se também os equipamentos utilizados na bancada instrumentalizada e o sentido do eixo de acionamento dos dosadores de adubo à taxa variável utilizados nos testes experimentais realizados em laboratório. Figura 6 Desenho da bancada experimental de testes Fonte: Valdiero et al. (2016b)

34 34 Na bancada dosadora, Figura 7, utilizou-se cinco dosadores de adubo por transbordo e um reservatório de fertilizantes sólidos, montados sobre uma estrutura tubular de aço. Essa estrutura tem como objetivo representar o sistema dosador de uma semeadora-adubadora comercial. O acionamento dos dosadores é realizado por um eixo de aço que possui em sua extremidade uma polia para acionamento da correia que será ligado ao sistema de acionamento hidráulico. A bancada possui também regulagem de inclinação para simulação com diferentes inclinações longitudinais. Figura 7 Componentes da bancada dosadora de adubo à taxa variável Fonte: próprio autor O projeto da bancada experimental atendeu os objetivos propostos. Na seção seguinte apresenta-se o sistema de acionamento. 2.1 Sistema Dosador de Adubo à Taxa Variável Os dosadores de adubo utilizados para a construção da bancada de testes foram desenvolvidos para efetuar com regularidade a distribuição de fertilizantes. Seu funcionamento faz com que o adubo seja impulsionado pela rosca sem fim e

35 35 conduzido até uma câmara de represamento, até que transborde em quantidades volumétricas, uniformes e homogêneas pelo regulador para o bocal de descarga, mostrado na Figura 8. A distribuição precisa e uniforme favorece a absorção dos fertilizantes pelas plantas em quantidades corretas, impulsionando o desenvolvimento vegetativo e produtivo. Figura 8 Dosador de adubo Fertisystem Fonte: adaptado de AGROMAC (2015) Na pesquisa, utilizou-se o dosador de fertilizantes helicoidal por transbordo da Fertisystem desenvolvidos pela empresa Agromac. Esse modelo de dosador possui a opção de regulagem da dosagem de fertilizante através da mudança do passo da rosca sem fim (( ) ) mostrado na Figura 9. Assim, quanto maior o passo do helicoide, maior é a quantidade de adubo dosada. Esse eixo helicoidal é baseado no parafuso de Arquimedes tendo a finalidade de transferir partículas entre dois pontos com elevações diferentes. Na antiguidade, os romanos utilizavam para retirar água de minas e poços artesianos (DALLEY e OLSON, 2003).
36 36 Figura 9 Exemplo dos passos de helicoides dosadores de adubo, (a) ( ), (b) e (c) de passo Fonte: adaptado de Agromac (2015) A opção pela utilização do modelo de dosador descrito justifica-se na ampla utilização por diferentes fabricantes de semeadoras-adubadoras de precisão. De acordo com Ferreira et al. (2007), o mecanismo dosador de adubo do tipo rosca sem fim é oferecido em aproximadamente 65,1% dos modelos de semeadorasadubadoras disponíveis no mercado brasileiro. Outra vantagem da utilização é devido à capacidade desses dosadores em desestruturar os empedramentos dos fertilizantes ocasionados devido à umidade relativa do ar ou da temperatura elevada. Esse fenômeno resulta em uma massa com tamanho maior que das partículas originais, o que exige maior força dos componentes mecânicos para a descompactação das pedras de adubo. 2.2 Acionamento Hidráulico A partir do conceito de projeto conceitual que, de acordo com Valdiero (2005), é a parte do processo onde as técnicas de criatividade, a elaboração de estruturas de funções, a procura por princípios de solução, suas combinações na síntese de concepções e as técnicas de avaliação são aplicadas com o propósito de se chegar a uma solução conceitual viável e capaz de resolver o problema. Desenvolveu-se um circuito de potência e condicionamento hidráulico, uma válvula de controle direcional e um atuador, além dos elementos que geram informações para o sistema de controle.
37 37 De acordo com o processo de projeto descrito em Pahl e Beitz, a fase de projeto conceitual segue a análise da necessidade e resulta na especificação de uma solução para o problema em estudo. A concepção da bancada experimental assumiu a forma de uma estrutura modular, composta por uma unidade hidráulica de alimentação e de comando, uma bancada de trabalho instrumentalizada e um microcomputador com placa eletrônica dspace, a qual foi acoplado à máquina dosadora por meio de uma transmissão de correia. O desenho conceitual do circuito hidráulico da bancada de trabalho instrumentalizado é representado pelo seu circuito hidráulico padrão ISO 1219 como é representado na Figura 10. Figura 10 - Circuito hidráulico da bancada de testes representada de acordo com a norma ISO 1219 Fonte: Ziech et al. (2016a) O projeto da fonte de alimentação hidráulica e a unidade de controle estão representados de acordo com o circuito hidráulico padrão ISO 1219 na Figura 11. A

38 38 fonte de alimentação hidráulica e unidade de controle são compostas por reservatório de fluido, filtros, motor elétrico, bomba, válvula de controle de fluxo variável, válvula de controle de pressão e acessórios básicos. O reservatório hidráulico armazena fluido de óleo hidráulico não pressurizado. O motor elétrico fornece a fonte de alimentação para a bomba hidráulica que transfere o fluido do reservatório para o sistema hidráulico. Esta transferência aumenta o nível de energia do fluido aumentando a sua pressão regulada. Figura 11 Circuito hidráulico proposto da bancada instrumentalizada representada de acordo com a norma ISO 1219 Fonte: Valdiero et al. (2016b) O sistema de acionamento é constituído por um motor hidráulico e seus componentes foram detalhados na Figura 12. O motor hidráulico (2) é parafusado a um flange fabricado em chapa de ¼ (um quarto de polegada), o qual é fixado ao quadro móvel; este quadro está soldado a dois suportes, sendo um deles para fixação do encoder incremental (4) e o outro para fixação da placa de ligação (12); para a transmissão do movimento rotativo do motor hidráulico até o módulo do equipamento é utilizada uma polia de alumínio (10) de diâmetro 200 mm (duzentos milímetros) de perfil A, a qual está montada a um eixo (8); o eixo do motor hidráulico
39 39 (2) está acoplado ao da polia (8) através de um acoplamento de dentes arqueados (9) que é composto por dois cubos de aço e uma capa de nylon; o posicionamento do eixo da polia é feito por mancais (6) e rolamentos (7); o encoder incremental (4) está montado na ponta do eixo (8) da polia, o qual possui um rebaixo; a válvula (3) está posicionada através de uma placa de ligação (12) que possui tamanho padrão para recebê-la e saída com tamanho de rosca padronizados para conexões G1/4 (15); as tubulações (14) são conectadas à válvula (3) através da placa de ligação (12) e das conexões (15), e ao motor hidráulico (2) através das conexões (15); entre os tubos (14) estão montados blocos de metal (13) com roscas G1/4 em quatro posições, sendo dois orifícios utilizados para unir os tubos, um orifício para conectar o pressostato (5) e um último orifício que está bloqueado, mas que pode receber algum outro elemento se for preciso; e por último temos uma correia de perfil A (11). Figura 12 Descrição dos componentes do sistema de acionamento Fonte: Ziech et al. (2016a) Este sistema hidráulico utiliza fluido comprimido para transferir a energia aplicada em um determinado ponto no equipamento agrícola. A transmissão por correia transmite a potência mecânica do motor hidráulico para o eixo de acionamento da dosadora de adubo com os 5 dosadores. O desenho da Figura 13

40 40 retrata como está montada a bancada com o motor hidráulico, sensores de pressão (transdutor eletrônico de pressão), o codificador rotativo (encoder incremental), uma válvula direcional proporcional e a transmissão de correia. Figura 13 Desenho da bancada instrumentalizada com a transmissão por correia Fonte: adaptado de Ziech et al. (2016a) O ângulo de rotação do eixo do motor hidráulico é detectado pelo codificador rotativo (encoder). Nota-se que a velocidade de rotação do motor é obtida a partir da diferença do ângulo de rotação, em cada momento da amostra, bem como será mostrado nas próximas secções que descrevem os resultados dos testes experimentais. Optou-se pelo acionamento hidráulico devido à baixa relação peso/potência, possibilitando grandes forças e torques elevados através de motores relativamente pequenos; adaptabilidade a condições extremas; resposta rápida à partida e inversão de movimento sob carga, devido aos baixos momentos de inércia; sistemas adequados tanto para o controle de processos em que o movimento é rápido quanto para o movimento de precisão extremamente lento; possibilidade de variação contínua de torque e rotação nos atuadores rotativos, por meio de controle e ajuste (LINSINGEN, 2001). A Tabela 2 mostra a lista de materiais utilizados no projeto da bancada experimental que foram ilustrados anteriormente.
41 41 Tabela 2 - Lista de materiais Item Descrição 1 Estrutura tubular 2 Motor hidráulico Hybel SM17 TN38 3 Válvula proporcional direcional 4/3 Bosch Rexroth 4WRAE 4 Encoder Incremental Hohner Série 75 5 Transdutor eletrônico de pressão Bosch Rexroth 6 Mancal de rolamento P205 7 Rolamento Ø25mm GE25-KRR-B 8 Eixo Ø25mm c/ rebaixo para encoder Ø10mm 9 Acoplamento de dentes arqueados furo Ø25 mm 10 Polia de alumínio Ø200mm Perfil A 11 Correia perfil A Placa de ligação TN4 tipo G467 (G1/4) 13 Bloco 4 roscas tipo G1/4 14 Tubulação Ø9mm 15 Conexões G1/4 Fonte: Ziech et al. (2016a) O motor hidráulico é o principal componente desta bancada. A partir da potência transmitida por ele, os estudos foram realizados para melhor dimensionamento de módulos e equipamentos utilizados na indústria agrícola, otimizando o desenvolvimento do sistema de adubação à taxa variável e consequentemente o desenvolvimento da agricultura de precisão. De acordo com Linsingen (2001), os motores hidráulicos, são conhecidos como máquinas de deslocamento positivo, porque a energia é transferida principalmente em forma de pressão, uma vez que a variação de energia cinética é pequena quando comparada com a energia total transferida, podendo portanto ser desprezada, ou seja, a conversão de energia por este processo sofre pouca ou praticamente nenhuma influência considerável da velocidade do fluido, massa específica ou inércia do eixo de acionamento. O motor hidrostático utilizado no desenvolvimento desta bancada é o modelo SM17 série Aluminibeta da fabricante Hybel com deslocamento por engrenagens. O motor pode ser visto em desenho 3D conforme a Figura 14 e suas especificações
 Tabela 3 Especificações técnicas do motor hidrostático Tamanho Nominal 38 Deslocamento Volumétrico 37,5 cm³/rot Pressão Máxima Contínua 250 bar")
42 42 técnicas estão descritas na Tabela 3 e também no catálogo do motor hidráulico, ANEXO A. Figura 14 Motor hidrostático Fonte: Engelmann (2015) Tabela 3 Especificações técnicas do motor hidrostático Tamanho Nominal 38 Deslocamento Volumétrico 37,5 cm³/rot Pressão Máxima Contínua 250 bar Pressão Máxima Intermitente 280 bar Pressão de Partida 300 bar Rotação Máxima 3000 rpm Rotação Mínima 500 rpm Fonte: Ziech et al. (2016a) Outro componente fundamental para o sistema de acionamento é a válvula de direcionamento. Para a execução dos testes experimentais, será utilizada, inicialmente, uma válvula direcional 4/3 (quatro vias/3 posições) com solenóide da fabricante Bosch Rexroth, visualizada na Figura 15. Outras informações referentes a válvula também são encontradas no ANEXO B.
 Optou-se pelo uso da válvula direcional on/off com solenoide devido ao baixo custo se relacionado aos outros modelos de válvula que possuem valor de compra elevado, como")

43 43 Figura 15 - Válvula hidráulica de controle direcional de 4 vias e 3 posições, centro fechado, centrada por molas e acionada por solenoides. Fonte: Engelmann (2015) Optou-se pelo uso da válvula direcional on/off com solenoide devido ao baixo custo se relacionado aos outros modelos de válvula que possuem valor de compra elevado, como por exemplo as servo-válvulas. A bancada experimental de testes com acionamento hidráulico utiliza a fonte de alimentação hidráulica e da unidade de controle mostrados na Figura 16. A taxa de fluxo do óleo hidráulico é regulada pela válvula de controle de fluxo variável e a pressão da fonte é ajustada pela válvula de controle de pressão. Figura 16 Fotografia da Unidade de Potência e Condicionamento Hidráulico (UPCH) Fonte: Renner (2010)

44 Sistema de Controle e Instrumentalização Para o sistema de controle, utilizou-se um sistema informatizado para maior eficiência e velocidade de desenvolvimento da bancada (ALMEIDA, 2000). A bancada conta com um sistema de controle composto por um computador, responsável pela visualização dos dados e interface com o operador. Além disso, uma fonte controladora, HP com 24 VDC (1), é utilizada para alimentar os sensores que realizam o monitoramento da pressão do sistema e o encoder incremental, também é utilizado uma fonte geradora de 12V para realizar o acionamento do solenoide da válvula direcional e assim evitar possíveis danos ou alterações. Ao computador esta ligado uma placa móvel dspace 1104 (2) responsável pela captura e armazenagem dos dados da bancada de testes, a qual utiliza a integração com o software Matlab/Simulink e permite a captura, controle e manipulação dos dados em tempo real diante de uma interface gráfica, possibilitando-se o processamento dos resultados obtidos, conforme demonstrado na Figura 17. Figura 17 - Sistema de controle da bancada instrumentalizada Fonte: próprio autor
45 45 O encoder incremental é um transdutor que converte um movimento angular ou linear em uma série de pulsos digitais elétricos. Esses pulsos gerados podem ser usados para determinar velocidade, taxa de aceleração, distância, rotação, posição ou direção (GOZZI et al., 2011). O encoder incremental utilizado na bancada instrumentalizada com motor hidráulico é da fabricante Hohner série 75 com eixo vazado de Ø10 mm, capacidade para uma rotação de até 3000 rpm e 1000 pulsos por revolução, o mesmo pode ser visualizado na Figura 18 e suas especificações técnicas são detalhadas na Tabela 4 e também no ANEXO C. Figura 18 Representação de funcionamento de um encoder Fonte: Fiori (2015) Tabela 4. Especificações técnicas do encoder incremental Rotação máxima Carga radial máxima Carga axial máxima Alimentação Corrente total máxima Corrente máxima por saída Frequência máxima 3000 rpm 10 kg 10 kg 5 a 28V cc 80 ma 20 ma 100 khz Temperatura de operação -10 a +80 ºC Pulsos por giro 1000 Fonte: próprio autor
46 46 Em relação aos sensores de pressão, Kilian (2004), relata que são compostos por duas partes: conversão de pressão numa força ou deslocamento e conversão de força ou deslocamento em sinal elétrico. Medidas de pressão são feitas apenas para gases e líquidos e podem ser medidas como: 1. Pressão Manométrica: diferença entre a pressão de interesse e a pressão atmosférica. 2. Pressão diferencial: diferença de pressão entre dois pontos distintos no circuito, onde nenhum deles está na pressão atmosférica necessariamente. 3. Pressão absoluta: medida por um sensor de pressão diferencial com um dos lados em 0 psi (próximo ao vácuo total). Para realizar a medição das pressões no sistema são utilizados transdutores de pressão marca Bosch Rexroth, cujas especificações técnicas são detalhadas na Tabela 5 e também no Anexo D. Tabela 5 Especificações técnicas do transdutor de pressão eletrônico Variáveis de entrada Tensão de alimentação Consumo de corrente Faixa de medição Proteção contra sobrecarga Variáveis de saída Corrente suportada Tempo de resposta Frequência maxima 18 a 36 V cc < 50 ma 100 bar 300 bar 250 ma < 3 ms 170 Hz Conexão de pressão G1/4 Conexão elétrica Para conector M12 Fonte: próprio autor Os transdutores de pressão eletrônicos estão acoplados a válvula direcional de controle proporcional para aquisição de dados referente às variações das pressões. A Figura 19 ilustra o transdutor de pressão eletrônico com saída analógica integrada utilizada na bancada experimental.

47 47 Figura 19 Transdutor de pressão eletrônico com saída analógica integrada Fonte: Engelmann (2015) 2.4 Descrição do protótipo da bancada experimental e seu funcionamento Para a realização dos testes, necessitou-se de uma série de equipamentos eletrônicos para acionar a válvula e monitorar as variáveis necessárias para o desenvolvimento da pesquisa. Na Figura 20, visualiza-se os equipamentos utilizados na bancada instrumentalizada para testes de um sistema dosador de adubo à taxa variável com acionamento hidráulico.


48 48 Figura 20 Equipamentos utilizados na bancada instrumentalizada para testes Fonte: próprio autor A fonte geradora de alimentação de tensão, Figura 21, é regulada para uma tensão de 12 V e corrente de 2,5 A, que é a tensão máxima e a corrente máxima aplicada ao solenóide da válvula direcional. Figura 21 - Fonte geradora de tensão Fonte: próprio autor


49 49 Em relação a alimentação dos sensores de pressão e do encoder, uma fonte geradora de tensão HP 24 VDC é utilizada como ilustra a Figura 22. Figura 22 - Fonte geradora de tensão HP 24 VDC Fonte: próprio autor Para que o sinal elétrico chegue até o solenoide da válvula, uma chave eletrônica é utilizada para realizar essa ligação, como mostra a Figura 23. Figura 23 Ligações e chave eletrônica Fonte: próprio autor


50 50 Na dspace é ligado o cabo da chave eletrônica, responsável em mandar comandos para a válvula, os transdutores de pressão e o cabo do encoder de acordo com a Figura 24. A principal vantagem da chave eletrônica é a possibilidade comandar o acionamento da válvula utilizando um computador com os softwares MatLab/Simulink e ControlDesk. Figura 24 dspace com os cabos de controle das variáveis Fonte: próprio autor Na Figura 25 é possível visualizar a dspace juntamente com a interface do operador, demonstrando o comportamento das variáveis. Figura 25 dspace com placa de aquisição de sinais de controle Fonte: próprio autor

51 51 Aa Figura 26 mostra a bancada instrumentalizada durante a realização dos testes experimentais com o detalhamento dos equipamentos utilizados nos procedimentos para a aquisição, processamento e refinamento dos dados. Figura 26 Bancada instrumentalizada para testes experimentais Fonte: próprio autor 2.5 Discussão Este capítulo abordou a bancada instrumentalizada de testes experimentais e os componentes que a integram. A bancada aqui apresentada foi importante para a captura dos parâmetros utilizados no modelo. Ainda, possibilitou o estudo e determinação do coeficiente de atrito, descrito no capítulo três, que será utilizado nas simulações computacionais para validar a modelagem matemática da dinâmica de um sistema dosador de adubo à taxa variável com acionamento hidráulico a partir
52 52 dos dados adquiridos nos testes experimentais em malha aberta apresentados no capítulo quatro. A bancada experimental de testes aqui apresentada foi divulgada no IX Congresso Nacional de Engenharia Mecânica (CONEM), realizado em Fortaleza - CE no ano de A qual gerou a publicação em Ziech et al. (2016a).
53 53 3 MODELAGEM MATEMÁTICA 3.1 Introdução Com o objetivo de conhecer a dinâmica de um sistema dosador de adubo a taxa variável, utilizou-se a Modelagem Matemática como ferramenta de investigação para o estudo de características e identificação de problemas. Nessa perspectiva, buscou-se refletir sobre a realidade do sistema e identificar às características e os parâmetros, como: torque motor ( ), velocidade angular ( ), quantidade de adubo dosada ( ), potência hidráulica ( ) e outras que serão detalhadas no decorrer do trabalho. Além disso, demonstraram-se as relações matemáticas representadas em um modelo matemático capaz de descrever os comportamentos do sistema dosador de adubo à taxa variável com acionamento hidráulico. Considerando este desafio, abordou-se a dinâmica de um dosador de adubo de uma semeador-adubadora para estudo dos comportamentos e a ação das forças que produzem ou modificam os movimentos. Para isto, a modelagem matemática e as simulações computacionais foram utilizadas para discutir suas propriedades e para definir seus parâmetros. Pois uma vez conhecendo a equação que descreve seu comportamento e seus parâmetros pode-se interferir no sistema, adequando ou compensando possíveis falhas. Segundo Bassanezi (2002), modelagem matemática é um processo que traduz situações reais para uma linguagem matemática com um modelo matemático que representa o fenômeno em estudo. Neste capítulo são apresentados os modelos utilizados e as hipóteses consideradas para a modelagem matemática. Na seção 3.2 apresentam-se as hipóteses da Modelagem utilizadas no modelo. Na seção 3.3 descreve-se a modelagem matemática do eixo dosador de adubo e as deduções matemáticas para a obtenção do modelo, na seção 3.4 apresentam-se algumas equações da física que foram utilizadas para a realização da modelagem matemática do sistema de acionamento hidráulico e a modelagem matemática do atrito dinâmico é apresentada na seção 3.5. Na seção 3.6 apresenta-se o modelo matemático e o diagrama de blocos utilizado para as simulações computacionais no Matlab/ Simulink. Por fim, na seção 3.7 algumas discussões sobre a importância dos modelos utilizados.
54 Condições para a Modelagem Matemática O problema proposto é desenvolver um modelo matemático capaz de descrever o comportamento dinâmico de um sistema de controle de adubação a taxa variável voltado para aplicações na agricultura de precisão, acionado hidraulicamente. Para a modelagem matemática do sistema dosador de adubo à taxa variável foram adotadas as seguintes condições: A dinâmica elétrica dos solenoides proporcionais e do movimento do carretel da válvula foi considerada muito rápida, ao serem comparadas com a dinâmica do movimento, sendo assim desprezadas. A dinâmica hidráulica também foi desprezada. Desprezou-se o atrito entre o carretel e o pórtico da válvula. O vazamento que ocorre no cilindro não é considerado na modelagem e tem efeito de amortecimento do sistema. O módulo de elasticidade do fluido é considerado constante. Seu valor está sujeito à pressão e à temperatura do fluido, portanto, esses efeitos não foram considerados no modelo. Para a modelagem matemática foi considerada as não linearidades do atrito. Para promover o entendimento da dinâmica a ser modelada, a Figura 27 ilustra quais sinais serão capturados para utilização nos modelos. A partir de um sinal de controle enviado para o sistema de acionamento hidráulico, um torque na transmissão de corrente é transferido para o eixo do dosador, gerando deslocamento angular nos dosadores de adubos que por sua vez são responsáveis pela vazão do adubo. Através do monitoramento do deslocamento angular e da pressão de carga do motor são realizados os cálculos para a definição dos parâmetros e variáveis que serão melhores detalhados no decorrer do trabalho.

55 55 Figura 27 - Desenho esquemático para a modelagem do sistema de adubação à taxa variável com acionamento hidráulico Fonte: próprio autor. Nas seções seguintes descrevem-se as equações da dinâmica do sistema de adubação à taxa variável e também é apresentado cada variável e constante utilizadas na modelagem matemática. 3.3 Modelagem Matemática da Dinâmica do Eixo de um Sistema Dosador de Adubo à Taxa Variável Com o intuito de abordar a dinâmica de um dosador de adubo de uma semeadora-adubadora para compreender os comportamentos e a ação das forças que produzem ou modificam os movimentos, a modelagem matemática foi utilizada para definir as propriedades e determinar os parâmetros. Utilizando-se da modelagem caixa branca que se baseia na utilização de princípios físicos para

56 56 explicar a natureza do sistema e demonstrar a influência dos parâmetros no processo. Considere o sistema dosador de adubo mostrado na Figura 28, comum em semeadoras adubadoras disponíveis comercialmente. O dosador é responsável em controlar a quantidade de adubo que é aplicado durante o deslocamento da máquina na área de cultivo. Este sistema é formado por um eixo helicoidal, que transporta o adubo até a saída do sistema. Figura 28 - Desenho do dosador helicoidal de fertilizantes por transbordo da marca FertiSystem e seu diagrama de corpo livre Fonte: Ziech et al. (2016b) A saída da quantidade de adubo depende da velocidade angular ( do eixo conectado ao sistema helicoidal. O acionamento do dosador é realizado por meio de um torque do motor m. Além disso, precisa-se considerar o torque de atrito atr que ocorre pelas perdas e resistências devido ao atrito contrário ao movimento, causado pelos mancais e no contato com o adubo, é o parâmetro que representa o momento de inércia equivalente de todo o sistema de transmissão mecânica do acionamento do dosador, é o parâmetro que caracteriza a dissipação de energia devido ao atrito no mancal e do contato com o adubo. Aplicando-se o princípio de D Alembert no Diagrama de Corpo Livre do eixo do dosador, tem-se:
57 57 (1) onde: dado pela seguinte equação: é o torque de atrito devido as características de atrito viscoso e é (2) Logo substituindo (2) em (1), tem-se a seguinte equação diferencial que representa o modelo dinâmico do torque dependente da velocidade angular. (3) E é a taxa variável de aplicação de adubo, dada pela seguinte equação que relaciona a constante de vazão ( ) mássica e a velocidade angular ( ): (4) Isolando a constante na equação (4) e substituindo na equação (3), tem-se a equação diferencial do modelo dinâmico da taxa variável de aplicação de adubo ): (5) 3.4 Modelagem Matemática do Sistema de Acionamento Hidráulico No desenvolvimento da pesquisa, faz-se uso de algumas equações básicas do estudo de sistemas hidráulicos, desprezando-se alguns fatores como o atrito e perdas no escoamento, para o cálculo da potência hidráulica requerida através dos valores de pressão e da vazão de fluído. De acordo com Lisingen (2001),
58 58 (6) A vazão ( ) pode ser obtida através da equação (7), que estabelece o produto entra o deslocamento volumétrico do motor ( ) e a velocidade angular ( ) : ; (7) Utilizando os conceitos estabelecidos pelas duas equações citadas, juntamente com o monitoramento da pressão e da velocidade angular, determina-se a base conceitual para o desenvolvimento da modelagem matemática. Segundo De Negri (2001), o torque do motor desenvolvido por qualquer tipo de motor hidráulico, pode ser expresso em relação ao produto do deslocamento volumétrico pela pressão: (8) Utilizando a equação (3) e substituindo por, tem-se o modelo matemático de adubação à taxa variável com acionamento hidráulico: (9) Os valores utilizados para a realização da modelagem matemática são descritos na Tabela 6.
59 59 Tabela 6 - Descrição dos Parâmetros e Variáveis Utilizados na Modelagem Matemática Parâmetros e Variáveis Descrição Unidades de Medida Deslocamento Volumétrico Velocidade Angular (Rotação) Aceleração Angular Vazão Volumétrica Quantidade de Adubo Dosada Constate de Vazão Mássica Torque Motor Torque de Atrito Inércia Equivalente Pressão de Carga Potência Hidráulica Coeficiente de Atrito Fonte: próprio autor 3.5 Modelagem da Dinâmica do Atrito O atrito é a força contrária ao movimento, suas características sempre estão presentes na interação entre os mecanismos mecânicos (VON-LINSINGEN, 2003). Para o estudo da dinâmica do movimento, deve-se considerar o efeito do atrito para compensar ou diminuir seus efeitos. Diante dessa perspectiva, na modelagem do dosador de adubo à taxa variável, procurou-se identificar o comportamento do atrito dentro do sistema para os testes experimentais em bancada instrumentalizada, descrita no capítulo 2. O atrito é geralmente descrito como a resistência ao movimento de duas superfícies em contato que afetam ou deterioram o desempenho e prejudicam o movimento. Nesse sentido, utilizando a modelagem pode-se compensar ou minimizar sua influência no sistema. De acordo com Canudas de Wit et al. (1995) o atrito ocorre em todas as máquinas que incorporam peças com movimento relativo, gerando assim em erros típicos de regime permanente em controle de posição e atraso no seguimento, resultando muitas vezes na instabilidade do sistema.
60 60 A força de atrito é composta por diversas características dinâmicas, como o atrito estático, o atrito de Coulomb, o atrito viscoso ou o atrito de arraste, o atrito Stribeck, a memória de atrito e o deslocamento de predeslizamento, que resultam em efeitos danosos ao controle. Um estudo destas características e dos efeitos provocados por elas pode ser visto em Valdiero (2005). O engenheiro mecânico Richard Hermann Stribeck foi o responsável em descrever o fenômeno não linear denominado atrito de Stribeck. Este fenômeno ocorre em velocidades da curva de atrito onde a inclinação é negativa. O francês Charles Augustin de Coulomb no final do século XVII pesquisou o atrito de Coulomb, demonstrando que suas características independem da área de contato, e é oposta ao movimento relativo e proporcional à força normal de contato. O atrito de arraste por sua vez, refere-se ao atrito causado pela resistência de um corpo ao movimento, e é proporcional ao quadrado da velocidade (decorrente em muitos casos de um escoamento turbulento) (FIORI, 2015). A Figura 29 apresenta em um gráfico essas características citadas anteriormente e utilizadas para a modelagem matemática da dinâmica do atrito em regime permanente. Figura 29 Gráfico com a combinação das características do atrito em regime permanente Fonte: adaptado Valdiero (2005)
61 61 De acordo com o modelo matemático proposto por Canudas de Wit et al. (1995),, equação (10), que, além de reproduzir os comportamentos não lineares do atrito, é adequado para ser utilizado em esquemas de compensação do atrito. Realizou-se o a captura dos parâmetros do atrito em regime permanente. ( ) (10) onde é o Torque de atrito de Coulomb, é o torque de atrito estático, é a velocidade de Stribeck e coeficiente de atrito viscoso. Em virtude da formulação matemática do modelo, equação (9), e da modelagem das características do atrito, equação (10), obtém-se o modelo matemático não linear que descreve o comportamento dinâmico do sistema de adubação à taxa variável com acionamento hidráulico, dado pela equação (11): ( ) (11) 3.6 Discussão O modelo matemático do dosador de adubo à taxa variável com acionamento hidráulico apresentado neste capítulo procurou abordar a não linearidade do atrito e também apresentar algumas leis físicas responsáveis pela dinâmica do movimento. A modelagem matemática aqui apresentada foi divulgada em forma de pôster no XXXVI Congresso Nacional de Matemática Aplicada e Computacional (CNMAC), realizado em Gramado RS no ano de O qual gerou a publicação em Ziech et al. (2016b) e Pinto et al (2016). Para a determinação do atrito, utilizou-se apenas o mapa estático de atrito, já que se operou a bancada instrumentalizada de testes experimentais apenas em baixas velocidades, como se pode constatar no capítulo 4. Nesse caso, podem-se identificar informações relevantes sobre as características do atrito que normalmente não são consideradas pela literatura, a qual geralmente faz a aproximação do atrito apenas pela característica linear.
62 62 4 RESULTADOS 4.1 Introdução Neste capítulo apresentam-se os resultados das simulações computacionais do modelo matemático do dosador de adubo à taxa variável com acionamento hidráulico, e também os testes realizados na bancada experimental. Para as simulações computacionais utilizou-se o software Matlab/Simulink com o método Runge Kutta de 4º ordem com passo de integração de segundos. Os testes realizados no dosador de adubo foram realizados em malha aberta, que de acordo com Ogata (1990) um sistema de controle em malha aberta é aquele no qual a saída não tem efeito sobre a entrada. Nesse tipo de sistema, a saída não é medida e nem realimenta em comparação com a entrada. De acordo com isso, a precisão do sistema depende única e exclusivamente de uma calibração para operar corretamente. A Figura 30 ilustra o sistema de controle em malha aberta. Figura 30 Sistema de controle em malha aberta Fonte: adaptado UMEZU (2003) Na identificação das não linearidades, foram realizados testes na bancada experimental instrumentalizada descrita no capítulo 2. Assim, na seção 4.2 apresenta-se a identificação da quantidade de fertilizante sólido que é conduzido do depósito até a saída do dosador. Na seção 4.3 buscou-se apresentar os testes experimentais em malha aberta para identificação dos parâmetros utilizados no modelo matemático e determinação dos coeficientes do atrito. A determinação do momento de inércia utilizado nas simulações computacionais é apresentada na seção 4.4. Os testes experimentais em malha são apresentados na seção 4.5. Na
63 63 seção 4.6 o modelo matemático e o diagrama de blocos utilizados nas simulações computacionais são apresentados. Os resultados das simulações computacionais e a validação do modelo matemático são exibidos na seção 4.7. Finalmente na seção 4.8 é realiza a discussão sobre os resultados obtidos e também algumas perspectivas futuras de trabalhos relacionados à pesquisa são propostas. 4.2 Determinação experimental do coeficiente de vazão mássica Conceitualmente o dosador de adubo é o elemento responsável em regular o fluxo de fertilizante. Dessa forma, se existir variação no fluxo de fertilizante, haverá variação no desenvolvimento das plantas resultando em perdas durante a colheita. Nesse sentido, procurou-se identificar o coeficiente de vazão mássica do dosador de adubo do dosador helicoidal de fertilizantes por transbordo da FertiSystem. Através dos testes experimentais em bancada instrumentalizada, investigou-se o desempenho do dosador e a regularidade no fluxo de fertilizante para quantificar a dosagem realizada em cada um dos cinco dosadores utilizados. A metodologia utilizada para os testes consistiu na pesagem do adubo que era dosada por cada dosador em 120 segundos. Para isso, utilizou-se uma balança digital e um cronômetro que eram filmados simultaneamente por uma câmera para registrar a relação entre o tempo e a quantidade pesada de adubo dosada, como ilustrado na Figura 31. A unidade de tempo utilizada para nos dados experimentais é dada em segundos e a quantidade de massa pesada foi medida em quilogramas.

64 64 Figura 31 Realização dos testes experimentais Fonte: próprio autor Apesar da evolução dos dosadores, alguns fatores influenciam na distribuição dos fertilizantes. Neste cenário, pode-se mencionar o ângulo de operação em que a semeadora-adubadora realiza a distribuição do fertilizante. De acordo com isso, procurou-se verificar o coeficiente de variação para a dosagem de fertilizante com diferentes angulações, usando-se helicoide de uma polegada. Para os testes realizados, analisou-se a influência da inclinação longitudinal dos dosadores, sendo utilizados três ângulos para a coleta das informações -15º, 0º, +15º, com o depósito de adubo do equipamento completo, de acordo como está ilustrado na Figura 32
 fertilizante mistura de grânulos (mistura granulada com composição física NPK de 2-20-20).")
65 65 Figura 32 Inclinação longitudinal e reservatório de adubo completo Fonte: próprio autor Utilizaram-se três rotações no eixo de acionamento dos dosadores (33.82, e ou 3.54, e 7.40 ) fertilizante mistura de grânulos (mistura granulada com composição física NPK de ). Para a determinação da constante de vazão mássica, realiza-se a captura do coeficiente angular da reta que relaciona o tempo com a quantidade de adubo dosada e divide-se pela velocidade angular no eixo de acionamento da dosadora de adubo. Para isso, isolando o da equação (4) descrita no capítulo 3, seção 3.3, tem-se a equação (12). (12) Para identificar o coeficiente angular da reta utilizou-se a função polyfit do Matlab que realiza o ajuste dos coeficientes de um polinômio e a função polyval que verifica o resultado do ajuste em um determinado ponto ou em vários pontos desejados, de acordo com o gráfico representado na Figura 33.
66 66 Figura 33 Gráfico para a captura do coeficiente angular Fonte: próprio autor Os valores da relação entre tempo e quantidade de adubo dosada constante de vazão mássica são apresentados na Tabela 7. Tabela 7 Valores da relação entre tempo e quantidade de adubo dosada da constante de vazão mássica e da e Rotação Repetições -15º 0º +15º -15º 0º +15º Teste Teste Teste Teste Teste Teste Teste Teste Teste Fonte: próprio autor
67 67 A partir dos dados da tabela, pode-se concluir que os valores da constante de adubação possuem maior variação com a angulação de +15º, chegando a um coeficiente de variação de 24,36%. Ferreira et al. (2007) que realizou testes em laboratório para verificar uniformidade de vazão de fertilizantes por dosadores helicoidais em função do nivelamento longitudinal com angulações de -10º, -5º, +5º e +10º com duas rotações do mecanismo dosador de 55 e 73. O autor relata que todas as inclinações proporcionaram variação significativa na dosagem em função da inclinação longitudinal, de acordo com os resultados obtidos nos testes. Os resultados apresentados por Reynaldo e Gamero (2015), que também realizaram uma avaliação do desempenho de mecanismos dosadores de fertilizante, tipo helicoidal rosca sem fim, submetidos a simulações em níveis de inclinação longitudinal e transversal (-15º, -5º, 0º, +5º e +15º), demonstraram que os ângulos de inclinação positivos, +5 e +15 apresentaram os maiores erros de dose. Verificou-se que as maiores variações ocorrem quando a inclinação é positiva, devido à resistência mecânica em relação à gravidade que é gerada para a rosca do dosador helicoidal empurrar o fertilizante para cima, resultando em condições de menor fluidez. 4.3 Identificação experimental dos parâmetros do atrito Nesta seção são apresentados os resultados dos testes experimentais realizados na bancada instrumentalizada com o objetivo de identificar os parâmetros não lineares do atrito. Em cada teste foram capturados dados através do ControlDesck e da instrumentalização, variando a velocidade angular da menor para a maior. Estes testes foram divididos em duas condições vazio (sem adubo no reservatório) e cheio (com adubo no reservatório). Nos testes realizados com adubo, procurou-se manter a mesma quantidade de adubo no reservatório em todos os testes, evitando diferenças na captura dos dados experimentais.
68 VAZIO CHEIO Condição Condição 68 Para o levantamento dos dados, utilizaram-se sensores de deslocamento angular (encoder) e sensores de pressão (transdutor de pressão eletrônico de pressão) como a descrição realizada no capítulo 2. A captura dos dados experimentais em regime permanente é apresentada na Tabela 8. Tabela 8 Dados Experimentais em regime permanente Testes [ ] * [ ] * Fonte: próprio autor Em cada experimento foi gerado um gráfico de seu deslocamento angular e posteriormente no trecho onde a velocidade era constante, ajustou-se uma reta. Este ajuste é necessário para melhorar os parâmetros estáticos do atrito, considerando que a velocidade em regime permanente, sem aceleração, pode-se desprezar a inércia. O programa utilizado é apresentado no Apêndice A. A partir da equação (13), que representa o modelo matemático do eixo do dosador de adubo à taxa variável e considerando-se que em regime permanente a aceleração é nula, ou seja,. Assim, pode-se formular a equação (14), onde o torque do motor é igual ao torque de atrito (13)
69 VAZIO CHEIO Condição Condição 69 (14) Além disso, uma relação de transmissão entre as polias de acionamento do motor e do eixo da dosadora também deve ser considerada para o cálculo do torque no eixo dos dosadores, já que não possuem o mesmo diâmetro. Chama-se relação de transmissão a razão entre o diâmetro da polia movida pelo diâmetro da polia motora. A partir da polia no eixo do motor que possui diâmetro de e a polia no eixo da dosadora de adubo possui diâmetro de 5, transformou-se os resultados da velocidade e do torque encontrados no eixo do motor para o eixo da dosadora e, de acordo com as equações (14) e (15), com a relação de transmissão de 0,8: (15) (16) 9. Desta forma, os valores dos resultados obtidos estão apresentados na Tabela Tabela 9 Parâmetros utilizado no mapa de atrito estático Testes Fonte: próprio autor
70 Torque de atrito 2 (N.m) 70 A partir dos resultados foi possível apresentar por meio de gráfico o comportamento do torque em função da velocidade angular em regime permanente, ilustrado na Figura 34. Figura 34 Gráfico comparativo do comportamento do atrito em regime permanente Mapa do atrito VAZIO e CHEIO Torque VAZIO Torque CHEIO Velocidade Angular w 2 (rad/s) Fonte: próprio autor A partir do gráfico apresentado na Figura 34, pode-se ajustar uma curva ao mapa estático, conforme apresentado na Figura 35, relacionando a velocidade em regime permanente e a força de atrito. Para isso, considera-se a equação (10) do atrito descrita na seção 3.5 (mapa estático de atrito) a qual captura as características do atrito estático, atrito de Coulomb, atrito de arraste e o atrito de Stribeck. Através da função nlinfit do Matlab, pode-se ajustar uma curva através de simulações computacionais, a fim de realizar o ajuste ideal para os parâmetros descritos na Tabela 10.
71 Torque de atrito 2 (N.m) 71 Tabela 10 Parâmetros característicos do modelo de atrito Parâmetro Descrição Valor Unidade VAZIO CHEIO Coeficiente de atrito Coulomb Coeficiente de atrito estático Velocidade de Stribeck Coeficiente de amortecimento viscoco (B) Fonte: próprio autor Na Figura 35, pode-se visualizar o ajuste realizado no mapa estático do atrito para as duas condições estudadas. O programa está descrito no Apêndice B. Figura 35 Gráficos com os ajustes do atrito: (a) VAZIO, (b) CHEIO Torque CHEIO Ajuste atrito Torque VAZIO Ajuste Atrito Velocidade Angular w 2 (rad/s) Fonte: próprio autor Os parâmetros apresentados na
72 72 Tabela 10 serão utilizados nas simulações computacionais do modelo matemático, que será detalhado na seção 4.7 deste capítulo. A partir da identificação das características do atrito, pode-se concluir que o comportamento se modificou de acordo com cada condição estudada. No teste em CHEIO o ajuste da curva de atrito teve o comportamento de uma reta e o modelo matemático da dinâmica do atrito foi alterado de acordo com a equação (16). (17) 4.4 Determinação do momento de inércia O momento de inércia de um objeto depende de sua massa e da distância da massa ao seu eixo de rotação. Esse valor não é uma quantidade única e fixa. Se o objeto é girado em torno de diferentes eixos, terá momentos de inércia diferentes, uma vez que a distribuição de sua massa em relação ao novo eixo é normalmente distinta do que era anteriormente. Com o software SolidWorks, uma ferramenta para o desenho mecânico do CAD 6, considerou-se o eixo de acionamento dos dosador e realizou-se uma análise computacional das peças utilizadas no projeto, Figura 36. Para determinar o valor da matriz de momento de inércia da massa são necessários seis valores de momentos de inércia da massa: um para cada um dos movimentos ao longo dos eixos X, Y, e Z da estrutura de coordenadas da peça e três termos de produtos de inércia: XY, YZ e XZ. Estes valores são calculados numericamente com base na geometria do bloco de esboço. 6 CAD = Desenho assistido por computador (DAC) ou CAD (do inglês: computer aided design) é o nome genérico de sistemas computacionais (software) utilizados pela engenharia, geologia, geografia, arquitetura e design para facilitar o projeto e desenho técnicos.
73 73 Figura 36 Eixo do dosador de adubo e polia de acionamento para a determinação do momento de inércia Fonte: próprio autor Considerando-se o sentido de giro da peça da Figura 36 foi em torno do eixo X, permitiu-se determinar o valor do momento de inércia, apresentado na Figura 37 e retirado SolidWorks. Esse valor será utilizado nas simulações computacionais do modelo matemática da dinâmica do sistema de adubação à taxa variável com acionamento hidráulico.
74 74 Figura 37 Determinação do momento de inércia Fonte: próprio autor Portanto, para as simulações computacionais e validação do modelo matemático adotou-se o valor do momento de inércia e também os parâmetros característicos do modelo de atrito, descritos na Tabela Testes Experimentais em Malha Aberta A velocidade angular do motor ( ) em cada teste foi medida por meio de um Tacômetro foto/contato digital, Figura 38 B, e também calculada pelo ângulo de inclinação da reta do deslocamento angular ( ), capturado pelo encoder incremental. Ressalta-se que os dados relacionados à velocidade angular analisados através da placa de aquisição (dspace) apresentam maior precisão e confiabilidade em relação ao dados medidos pelo Tacômetro.

75 75 Figura 38 A: procedimento para mensuração da velocidade angular; B: Tacômetro foto/contato digital Fonte: próprio autor Considerando-se um trecho do movimento do eixo do motor de acionamento da adubadora entre os instantes de 20 a 120 segundos na Figura 39, pode-se avaliar a rotação do motor e sua velocidade angular durante os testes. Para conhecer a inclinação da reta, utilizou o mesmo procedimento da captura da constante de vazão mássica através da função polyfit e polyval do Matlab que realiza o ajuste dos coeficientes de um polinômio.
.")
76 76 Figura 39 - Gráfico do deslocamento angular no eixo de acionamento da adubadora Fonte: próprio autor Os testes realizado utilizaram velocidades ente 30 rpm até 135 rpm de acordo com as necessidades de aplicação de adubo nas lavouras pelas semeadorasadubadoras considerando a quantidade mínima e a máxima de adubo depositada no solo (EMBRAPA, 2015). Além da velocidade angular, também foi realizado a medição da pressão de carga do sistema através dos sensores que realizavam o monitoramento da pressão. A partir dos dados armazenados na placa eletrônica de aquisição de dados pode-se verificar o comportamento dessa pressão durante os testes experimentais realizados na bancada. Utilizando a pressão de carga do motor, pode-se estimar o consumo de energia dos fertilizantes medindo a potência hidráulica fornecida pelo motor hidráulico (DE NEGRI e TOTTEN, 2011) e dada pela equação (17). (18)
77 Pressão (bar) 77 Onde pode ser calculada por: é a taxa de fluxo do óleo hidráulico (DE NEGRI e TOTTEN, 2011) e (19) onde D representa o deslocamento volumétrico do motor ( 5 ) e a velocidade de rotação do motor hidráulico. A Figura 40 mostra o gráfico dos sinais de pressão no motor hidráulico ( é a pressão de carga e é a pressão de alimentação). A partir deste gráfico para cada teste experimental é possível determinar valores da pressão em cada experimento. Figura 40 Gráfico do monitoramento da pressão de carga do motor hidráulico Comportamento pressão de carga pa ps deltap valvula Tempo t (s) Fonte: próprio autor Com a realização dos testes e captura dos parâmetros, pode-se também realizar o cálculo do torque necessário para o acionamento dos dosadores de adubo. Segundo De Negri (2001), o torque ideal que pode ser desenvolvido por qualquer tipo de motor hidráulico pode ser expresso de acordo com a equação (19):
78 78 (20) Esse torque surgirá para que o motor vença os esforços devido ao momento de inércia, atritos e cargas externas: (21) Na Tabela 11 apresentam-se os testes experimentais do consumo de potência e o torque no eixo de acionamento de uma adubadora a taxa variável voltada para aplicações na agricultura de precisão. Tabela 11 Parâmetros do consumo da potência e do torque hidráulico Parâmetros Pressão média de carga p med (bar) Pressão máxima de carga p max (bar) Fluxo de fluído hidráulico Q (m³/s) Velocidade de rotação do motor hidráulico m (rad/s) Potência média consumida P hid_med (W) Potência máxima consumida P hid_max (W) Torque hidráulico médio T hid_med (W) Torque hidráulico máximo T hid_max (W) Fonte: Valdiero et. al (2016b) O programa para processamento dos testes experimentais em bancada instrumentalizada é apresentado no Apêndice C.
79 Implementação Computacional do Modelo Matemático Após a identificação dos parâmetros e ajuste no modelo da dinâmica do atrito, definiu-se o modelo matemática de controle de adubação à taxa variável, descrito na equação (22) e os dados da Tabela 10, realizaram-se as simulações matemáticas com o objetivo de avaliar o comportamento e a eficiência de acordo com os dados experimentais adquiridos. (22) A implementação do modelo matemático para as simulações computacionais foi realizada através do Simulink, sendo este uma extensão do Matlab. Este software é apropriado para a simulação numérica de sistemas dinâmicos e possibilita ao usuário a representação dos mais variados sistemas lineares e não lineares. Sua interface primária é uma ferramenta de diagramação gráfica por blocos e biblioteca customizada de blocos. Na Figura 41, pode-se visualizar o diagrama de blocos que representa o modelo matemático apresentado na equação (22). Figura 41 Diagrama de blocos do modelo matemático da dinâmica de um sistema dosador de adubo à taxa variável com acionamento hidráulico Fonte: próprio autor
80 80 Outro fator existente é o modelo dinâmico do atrito, há o mapa estático do atrito, descrito na equação (10) e escrito no diagrama de blocos conforme a Figura 42. Figura 42 Diagrama de Blocos do Modelo de Atrito Dinâmico Fonte: próprio autor Através do diagrama de blocos apresentado na Figura 41 e Figura 42 foi realizada a validação matemática do modelo por meio do deslocamento angular e também da velocidade angular. Para isso, se compara as simulações computacionais com os dados experimentais realizados na bancada instrumentalizada de testes, detalhado na seção seguinte. 4.7 Simulações computacionais e validação do modelo matemático Diante da implementação computacional, realizou-se as simulações computacionais para a validação do modelo matemático, utilizando os dados experimentais adquiridos através dos testes realizados em bancada instrumentalizada. Ao fazer uma análise do sistema de adubação à taxa variável, buscou-se entender a relação entre a velocidade angular e a quantidade de adubo dosada. Em consequência disso, o deslocamento angular foi utilizado nos testes experimentais para captura da velocidade angular como foi descrito nas seções anteriores. A partir da comparação entre comportamento do deslocamento angular das simulações computacionais e do experimento pode-se avaliar a qualidade do modelo
81 deslocamento angular (rad) 81 matemático, como ilustrado na Figura 43. O programa utilizado para as simulações está descrito no Apêndice D. Figura 43 Gráfico do deslocamento angular para validação do Modelo Matemático 400 Simulação 350 Experimento utilizando os dados experimentais do teste 1 Experimento tempo (s) Fonte: próprio auto Ao analisar a Figura 43, pode-se perceber que o comportamento do deslocamento angular da simulação e do experimento para o teste 1 foram semelhantes. A partir do gráfico, demonstrou-se que o comportamento do modelo matemático representa com fidelidade o experimento. Para essa simulação foi utilizado o torque no eixo de dosadora de e os parâmetros do atrito apresentados na Tabela 10 o valor de para o momento de inércia. Além do deslocamento angular, capturou-se também a velocidade angular em cada experimento, utilizando-se do dado experimental e comparando-se com a simulação computacional do modelo matemático, obtém-se o seguinte gráfico que está representando na Figura 44.
82 velocidade angular (rad/s) 82 Figura 44 Gráfico da velocidade angular no eixo da dosadora para validação do Modelo Matemático utilizando os dados experimentais do teste Simulação computacional Experimento erro tempo (s) Fonte: próprio auto No gráfico da Figura 44, a velocidade do experimento no eixo da dosadora foi de Pode-se concluir que o comportamento da velocidade angular do modelo matemático está de acordo com o experimento realizado na bancada instrumentalizada de testes. Para demonstrar a acurácia da simulação em relação ao experimento, foi calculado o erro, que trata da diferença entre a simulação computacional e os dados experimentais, o qual está próximo de zero. No segundo iniciais observa-se um desempenho diferente no experimento real em relação à simulação, principalmente nos segundos iniciais, isso ocorre devido às características do atrito, gerando oscilações no comportamento da velocidade antes do sistema entrar em regime permanente. Ao analisar o teste 4, pode-se constatar que o comportamento da simulação computacional do modelo matemático através do deslocamento angular, Figura 45, e da velocidade angular, Figura 46, coincidem com os dados experimentais adquiridos nos testes em bancada.
83 deslocamento angular (rad) 83 Figura 45 - Gráfico do deslocamento angular para validação do Modelo Matemático utilizando os dados experimentais do teste Simulação 350 Experimento tempo (s) Fonte: próprio autor Para essa simulação foi utilizado o torque no eixo de dosadora de A velocidade angular de experimento é de
84 velocidade angular (rad/s) 84 Figura 46 - Gráfico da velocidade angular no eixo da dosadora para validação do Modelo Matemático utilizando os dados experimentais do teste Simulação computacional Experimento erro tempo (s) Fonte: próprio autor Na Figura 47 e figura apresenta-se a simulação computacional do modelo matemático utilizando os dados experimentais do deslocamento angular e da velocidade angular do teste 13, respectivamente. A velocidade angular no eixo da dosadora foi de e o torque de
85 velocidade angular (rad/s) deslocamento angular (rad) 85 Figura 47 - Gráfico do deslocamento angular para validação do Modelo Matemático utilizando os dados experimentais do teste Simulação 350 Experimento tempo (s) Fonte: próprio autor Figura 48 - Gráfico da velocidade angular no eixo da dosadora para validação do Modelo Matemático utilizando os dados experimentais do teste Simulação computacional Experimento erro tempo (s) Fonte: próprio autor
86 86 Em relação ao erro, percebe-se que em todas as situações apresentadas ficou sempre próximo de zero, demonstrando a proximidade entre a simulação e os dados experimentais. Na seção seguinte apresenta-se a discussão da validação do modelo matemático a partir dos dados apresentados nas simulações computacionais. 4.8 Discussão Apresentou-se neste capitulo os resultados experimentais obtidos por meio dos testes em bancada instrumentalizada com o objetivo de realizar a validação do modelo matemático apresentado no capítulo 3. Para isso, realizou-se a comparação das simulações computacionais com os resultados experimentais e constatou-se que o modelo adotado e a metodologia proposta para a implementação no diagrama de blocos representaram com eficácia o comportamento dinâmico do sistema de adubação à taxa variável com acionamento hidráulico. As simulações computacionais do modelo matemático tiveram o objetivo de simular o comportamento do sistema de adubação através da manipulação das variáveis e parâmetros estruturais já descritas anteriormente e representar a relação entre a variável de entrada (torque) e de saída (velocidade angular) para interpretar e prever futuros problemas. buscando a otimização do sistema em estudo. Os resultados apresentados neste capítulo foram apresentados em forma de trabalho no 9º Simpósio sobre Potência Líquida (9th FPNI Phd. Symposium on Fluid Power) realizado em Florianópolis - SC no ano de O qual gerou a publicação em Valdiero et al. (2016b). Os testes experimentais do consumo de potência no eixo de acionamento de uma adubadora a taxa variável para uso na agricultura de precisão também foram publicados em forma de trabalho, gerando a publicação Valdiero et al. (2016a).
87 87 5 CONCLUSÕES E PERSPECTIVAS FUTURAS Nesta dissertação abordou-se o desenvolvimento e a validação de um modelo matemático capaz de descrever o comportamento de um sistema de acionamento hidráulico para adubação a taxa variável, voltado para aplicações na agricultura de precisão. Realizou-se também o estudo e a modelagem das características não lineares do atrito presentes no sistema mecânico de adubação. Apresentou-se uma revisão bibliográfica da literatura, pesquisando as informações sobre a agricultura de precisão e algumas tecnologias utilizadas para potencializar sua aplicação. Além disso, descreveu-se a bancada instrumentalizada de testes experimentais e seu funcionamento. Para a modelagem matemática descreveu-se os principais parâmetros característicos da dinâmica do atrito, evidenciando a relevância desta pesquisa por tratar da presença de tais características, de sua modelagem e suas aplicações. A validação do modelo matemático ocorreu por meio de simulações computacionais utilizando os parâmetros adquiridos através dos testes experimentais em bancada instrumentalizada. Os resultados em malha aberta demonstraram a eficiência do modelo descrito e atenderam os objetivos propostos em representar o comportamento dinâmico do sistema de adubação à taxa variável com acionamento hidráulico voltado para aplicações na agricultura de precisão. Sugerem-se para continuidade deste trabalho as seguintes perspectivas de pesquisa: Considerar a dinâmica hidráulica das válvulas de controle; Implementar testes experimentais em malha fechada; Dimensionar um sistema de acionamento hidráulico para o número de linhas comuns nas máquinas semeadoras-adubadoras comerciais (de 6 a 30 linhas); Desenvolver um protótipo cabeça de série em parceira com fabricantes de máquinas agrícolas; Realizar testes em campo para comparação com os testes em laboratório e literatura específica;
88 88 REFERÊNCIAS BIBLIOGRÁFICAS AGROMAC, AGROMAC Tecnologia Agrícola Ltda. Catálogo Técnico. Disponível em: < Acessado em 07/10/ ARVUS, ARVUS Tecnologia. Princípios em Agricultura de Precisão. Disponível em: < Acesso em 08/10/ ALCARDE, J. C.; GUIDOLIN, J. A.; LOPES, A. S. Os Adubos e a Eficiência das Adubações. ANDA Associação Nacional para Difusão de Adubos, v. Boletim Té, n. 3 a edição, p. 1 43, ALMEIDA, F. Estudo e Escolha de Metodologia para o Projeto Conceitual. Revista de Ciencia e tecnologia, v. V.8, p , ALTMANN, A. S., BONOTTO, G. J., BEDIN, P. R, SILVEIRA, HENDRIGO, A. T., CARPES, D. P., DIAS, V. O., MONTEMEZZO J., ALONÇO, A. dos S. Metodologia para avaliação dos mecanismos dosadores de fertilizantes em semeadorasadubadoras. XIV Simpósio de Ensino, Pesquisa e Extensão. 10 a 12 de novembro de Centro Universitário Franciscano. BALBINO, L. C. et al. Evolução tecnológica e arranjos produtivos de sistemas de integração lavoura-pecuária-floresta no Brasil. Pesq. agropec. bras. [online]. 2011, v.46, n.10. ISSN X. BASSANEZI, R.C. Ensino-aprendizagem com Modelagem Matemática. São Paulo: Contexto, BOLFE, Édson Luis; PEREIRA, Rudiney Soares and MADRUGA, Pedro Roberto de Azambuja. Geoprocessamento e sensoriamento remoto aplicados à análise de recursos florestais. Cienc. Rural [online]. 2004, vol.34, n.1, pp ISSN CANUDAS-DE-WIT, C.; OLSSON, H.; ÅSTRÖM, K. J.; LISCHINSKY, P. A new model for the control of systems with friction. In: IEEE Transactions on Automatic
89 89 Control,, [S.l.], vol.40, n. 3, p , mar CARNEIRO, Franciele Morlin et al. Adubação mecanizada: aplicação individualizada de nitrogênio, fósforo e potássio em cana-de-açúcar. Rev. Ciênc. Agron. [online]. 2017, vol.48, n.2, pp ISSN CASSIA, Marcelo T. et al. Monitoring of mechanized harvest operation of soybean seeds. Revista Brasileira de Engenharia Agrícola e Ambiental, Campina Grande, v.19, n.12, p , dez Disponível em < Acesso em 20 out COMPAGNON, A. M.; SILVA, R. P.; CASSIA, M. T.; GRAAT, D.; VOLTARELLI, M. A. Comparação entre métodos de perdas na colheita mecanizada de soja. Scientia Agropecuaria, v.3, p , org/ /sci.agropecu CONAB - COMPANHIA NACIONAL DE ABASTECIMENTO. Acompanhamento da safra brasileira: grãos, quarto levantamento, dezembro CONAB - Companhia Nacional de Abastecimento, v. 3, n. 4, p , CONAB - COMPANHIA NACIONAL DE ABASTECIMENTO. Acompanhamento da safra brasileira: grãos, quarto levantamento, dezembro CONAB - Companhia Nacional de Abastecimento, v. 3, n. 4, p , Dalley, S.; Oleson, J. P.. Sennacherib, Archimedes, and the Water Screw: The Context of Invention in the Ancient World. Technology and Culture, v.44, n.1, Jan DE NEGRI, Victor Juliano. Sistemas hidráulicos e pneumáticos para automação e controle. Parte III Sistemas hidráulicos para controle. Florianópolis: Universidade Federal de Santa Catarina, (Apostila). ECOAGRO. O Agronegócio no Brasil. Disponível em: Acesso em: 30 out
90 90 EMPRESA BARSILEIRA DE PESQUISA AGROPECUÁRIA EMBRAPA. Centro Nacional de Pesquisa de Soja. Tecnologias de produção de soja, ENGELMANN, Felipe Ricardo. Desenvolvimento e construção de uma bancada com motor hidráulico, instrumentalizada para testes Trabalho de Conclusão de Curso. (Graduação em Engenharia Mecânica) - Universidade Regional do Noroeste do Estado do Rio Grande do Sul, UNIJUÍ. Panambi, FERREIRA, M. F. et al. Desempenho de distribuidores de adubo tipo rosca sem fim por transbordo e por gravidade em função do nivelamento longitudinal do dosador. Revista Tecno-Lógica, v. 11, n. 1 e 2, p , FERREIRA, M. F. P.; Dias, V. de O.; Oliveira, A.; Alonço, A. dos S.; Baumhardt, U. B. Uniformidade de vazão de fertilizantes por dosadores helicoidais em função do nivelamento longitudinal. Engenharia na Agricultura, v.18, p , FIORI, A. F. Modelagem matemática da dinâmica de uma transmissão mecânica do tipo fuso de esferas de um robô gantry f. Dissertação (Mestrado em Modelagem Matemática) Universidade Regional do Noroeste do Estado do Rio Grande do Sul, Ijuí, FLORES, Jeferson Vieira and SILVA JR, João Manoel Gomes da. Estratégia de controle para o seguimento de referências em sistemas de tempo discreto com atuadores saturantes. Sba Controle & Automação [online]. 2010, vol.21, n.1, pp ISSN FONTANA, R. L. M. et al. Teorias Demográficas e o Crescimento Populacional no Mundo. Ciências humanas e sociais, v. 2, p , GARCIA, A. P. Sistemas de controle fuzzy para dosadores helicoidais de fertilizantes com acionamento elétrico. 116 p. Tese (Doutorado) Faculdade de Engenharia Agrícola da Univercidade Estadua de Campinas (UNICAMP). Campinas, 08 fev GONÇALVES, Marcia F.. Modelagem Matemática de uma Bancada Experimental Acionada Hidraulicamente para Simulações de Aclives f. Dissertação (Mestrado) Universidade Regional do Noroeste do Estado do Rio Grande do Sul.
91 91 Programa de Pós Graduação em Modelagem Matemática, UNIJUI. Ijuí, GOZZI, G. G. M.; PAREDE, T. M. S.; HORTA, E. Eletrônica de Máquinas e Instalações Elétricas. São Paulo, Fundação Padre Anchieta, ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. ISO 1219: Fluid power systems and components Graphic symbols and circuit diagrams.. Rio de Janeiro, JOHN DEERE. Série 2100 Plantadeiras John Deere. John Deere, Disponivel em: < #8>. Acesso em: 27 out KILIAN, C.. Modern Control Technology: Components & Systems, Capítulo 6. Delmar, 2. ed., LINSINGEN, I. V.. Fundamentos de sistemas hidráulicos. Florianópolis:UFSC, LOPEZ, A.S.; GUILHERME, L. R. G. Interpretação de Análise de Solo: Conceitos e Aplicações. 2.ed. São Paulo, ANDA, p. (Boletim Técnico, 2). MACHADO, O. D. DA C. et al. Acurácia das semeadoras-adubadoras à taxa variável. Ciência Rural, v. 45, n. 7, p , 2015a. MACHADO, O. D. DA C. et al. Acurácia e tempos de resposta de máquinas para aplicação de defensivos agrícolas à taxa variável. Ciência Rural, v. 45, n. 3, p , 2015b. MANTOVANI, Ivan Junior. Desenvolvimento e construção de um sistema elétrico de dosagem a taxa variável de fertilizante sólido p. Trabalho de Graduação (Engenharia Mecânica) Universidade Regional do Noroeste do Estado do Rio Grande do Sul, UNIJUI. Panambi, MARTINS, M. de M. Desenvolvimento de um dosador helicoidal visando sua utilização em equipamentos de aplicação localizada de fertilizantes sólidos.
92 92 99p. Dissertação (Mestrado) Faculdade de Engenharia Agrícola da Univercidade Estadua de Campinas (UNICAMP). Campinas, MASSEY FERGUSON. MF 700 CFS: Plantadora adubadora versão mecânica e pneumática. Massey Ferguson, Disponivel em: < Acesso em: 27 out MOLIN, J. P. Agricultura de Precisão: Situação atual e perspectivas. Milho: Estratégias de Manejo para Alta Produtividade, p , MOLIN, J. P.; AMARAL, L. R.; COLAÇO, A. F.. Agricultura de precisão ed. --. São Paulo : Oficina de Textos, MOLIN, J.P.; MAZZOTTI, H. C.. Influência da Utilização e do Tipo de Amortecedores de Ricochete em Ensaios de Aplicadores a Lanço. Revista Eng. Agrícola e Ambiental, Campina Grande, v.4, n.2, p.281, OGATA, K. Modern Control Engineering. 2.ed. Englewood Cliffs: Prentice-Hall, p. PAHL, G.; BEITZ, W. Engineering design: a systematic approach. Londres: The Design Council, PATERNIANI, E.. Agricultura sustentável nos trópicos. Estud. av. [online]. 2001, v.15, n.43, pp ISSN RENNER, Rogério. Projeto e construção de uma unidade de potência e condicionamento hidráulico Trabalho de Conclusão de Curso. (Graduação em Engenharia Mecânica) - Universidade Regional do Noroeste do Estado do Rio Grande do Sul - UNIJUÍ. Panambi, REXROTH. Catálogo de transdutor de pressão eletrônico com saída analógica integrada. Lohr am Main, Germany. Bosch Rexroth REXROTH. Catálogo de válvulas direcionais proporcionais. Atibaia. Bosch Rexroth. 2004b.
93 93 REYNALDO, É. F. ; GAMERO, C. A.. Avaliação de mecanismos dosadores de fertilizantes Helicoidais em ângulos de nivelamento longitudinal e Transversal. Energia na Agricultura, Botucatu, vol. 30, n.2, p , abril-junho, SANTOS, Marcelo Soares Teles and SA, Nelsi Côgo de. O uso do GPS em levantamentos geofísicos terrestres. Rev. Bras. Geof. [online]. 2006, v.24, n.1, pp ISSN X. SCHUELLER, J. K. A review and integrating analysis of Spatially-Variable Control of crop production. Fertilizer Research, v. 33, n. 1, p. 1 34, out SEMEATO. Plantadeiras: Sol Tower. Semeato, Disponivel em: < Acesso em: 27 out SILVA, S.L.; BENEZ, S.H.; RICIERI, R.P. & PEREIRA, J.O. Demanda energética em sistema de semeadura direta em milho. In: CONGRESSO BRASILEIRO DE ENGENHARIA AGRÍCOLA, 29., Fortaleza, Anais. Fortaleza, Sociedade Brasileira de Engenharia Agrícola, STARA. Prima Super e Seres Super: Grandes semeadoras para culturas de inverno. Stara, 2016a. Disponivel em: < Acesso em: 27 out STARA. Victória: Plantio com precisão para pequeno e médio agricultor. Stara, 2016b. Disponivel em: < Victo%CC%81ria-POR.pdf>. Acesso em: 27 out STARA. Victótia Top RD e Victória Semntes RD: Plantadora para sementes graúdas com alto porder de precisão. Stara, 2016c. Disponivel em: < POR.pdf>. Acesso em: 27 out Sulzbach, L. Tecnologia de Agricultura de Precisão: estudo de caso: integração de modelos digitais de atributos químicos do solo e modelos digitais de culturas agrícolas, Santa Maria, RS f. Dissertação (Mestrado em engenharia agrícola) Universidade Federal de Santa Maria, Santa Maria, 2003.
94 94 TOTTEN, G. E. ; DE NEGRI, V. J.. Handbook of Hydraulic Fluid Technology. 2ª. ed. Boca Raton, Flórida: CRC Press - Taylor & Francis Group, UHRY, D. Avaliação e critério para a utilização de semeadora com sistema de taxa variável de sementes na cultura da soja. [s.l.] Tese (Doutorado) - UFSM, Santa Maria, UMEZU, C. K. Sistema de controle de um equipamento de formulação, dosagem e aplicação de fertilizantessólidos a taxas variáveis. [s.l.] Tese (Doutorado) - UNICAMP, VALDIERO, A. C. Controle de robôs hidráulicos com compensação de atrito Tese (Doutorado em Engenharia Mecânica) Programa de Pós-graduação em Engenharia Mecânica, Universidade Federal de Santa Catarina, Florianópolis, VALDIERO, A. C.; ZIECH, R. O. ; PINTO, M. S. ; CERVI, J.A. ; RASIA, L. A.. Testes Experimentais do Consumo de Potência no Eixo de Acionamento de uma Adubadora a Taxa Variável para Uso na Agricultura de Precisão. In: David Luciano Rosalen; Rouverson Pereira da Silva; José Eduardo Pitelli Turco. (Org.). Novas tecnologias e inovações na engenharia. 1ed.Jaboticabal: SBEA, 2016a, v. 1, p VALDIERO, A. C.; ZIECH, R. O.; PINTO, M. S.; MANTOVANI, I. J.; RASIA, LUIZ A.. Development and Construction of an Instrumentalized Workbench With a Hydraulic Motor for Farm Machine Testing. In: 9th FPNI Ph.D. Symposium on Fluid Power, 2016, Florianópolis. ASME Conference Proceedings. New York: ASME, 2016b, v. 1, p VENCE TUDO. Macanuda Fertilizantes: Semeadora adubadora para grãos grossos. Vence Tudo, 2016a. Disponivel em: < pdf>. Acesso em: 27 out VENCE TUDO. Panthe Precision: Semeadora adubadora para grãos grossos. Vence Tudo, 2016b. Disponivel em:
95 95 < pdf>. Acesso em: 27 out VON LINSINGEN, I. Fundamentos de Sistemas Hidráulicos. 2. ed. Florianópolis: UFSC, YU, J. H. et al. Development of a Controller for Variable-Rate Application of Granular Fertilizer in paddy farming Portland, Oregon, July 9-12, Anais...St. Joseph, MI: American Society of Agricultural and Biological Engineers, 2006 ZIECH, R. O. ; PINTO, M. S. ; BUENO, F. O. ; CERVI, J.A. ; CAVAGNOLLI, N. ; VALDIERO, A. C. ; RASIA, LUIZ A.. Projeto conceitual de uma bancada instrumentalizada para testes de um dosador de adubo à taxa variável com acionamento hidráulico. In: IX Congresso Nacional de Engenharia Mecânica, 2016, Fortaleza. Anais do CONEM Rio de Janeiro: ABCM, 2016a. v. 1. p ZIECH, R. O. ; PINTO, M. S. ; VALDIERO, A. C. ; RASIA, LUIZ A.. Modelagem Matemática da Dinâmica do Eixo de um Sistema Dosador de Adubo à Taxa Variável. In: XXXVI Congresso Nacional de Matemática Aplicada e Computacional, 2016, Gramado. Proceeding Series of the Brazilian Society of Computational and Applied Mathematics. São Carlos: Sociedade Brasileira de Matemática Aplicada e Computacional, 2016b. v. 5. p ZIECH, R. O.; PINTO, M. S.; VALDIERO, A. C.; RASIA, L. A.. Estudo de Tecnologias para Adubação a Taxa Variável. In: 1º Congresso de Ciência e Tecnologia do Comung - ComungTEC / 9º Congresso de Ciência e Tecnologia do Vale do Taquari - CCTEC, 2015, Lajeado. Anais do ComungTEC/CCTE. Lajeado: UNIVATES, v. 1. p
96 96 APÊNDICE A Programa para processamento dos testes experimentais e determinação do coeficiente de vazão mássica clear all close all; clc t=[0, % vetor de tempo comum para todos testes 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 55, 60, 65, 70, 75, 80, 85, 90, 95, 100, 105, 110, 115, 120]; % Teste 1, inclinção 0 30 rpm massa1=[
97 ]; figure; plot(t,massa1,'*r'); xlabel('tempo (s)'); ylabel('massa (kg)'); legend('resulatdo Experimental'); grid; retamassa1=polyfit(t,massa1,1) %para ajustar os coeficientes do polinômio, neste caso grau 1 Massajuste1= polyval(retamassa1,t);%gera os coeficientes figure; plot(t,massa1,'*r', t, Massajuste1,'b'); xlabel('tempo (s)'); ylabel('massa (kg)'); legend('resulatdo Experimental', 'Resultado ajustado'); grid; % Teste 2, inclinção 0 w = 30 rpm massa2=[ ]; figure; plot(t,massa2,'*r'); xlabel('tempo (s)'); ylabel('massa (kg)'); legend('resulatdo Experimental'); grid; retamassa2=polyfit(t,massa2,1) %para ajustar os coeficientes do polinômio, neste caso grau 1 Massajuste2= polyval(retamassa2,t);%gera os coeficientes
98 98 figure; plot(t,massa2,'*r', t, Massajuste2,'b'); xlabel('tempo (s)'); ylabel('massa (kg)'); legend('resulatdo Experimental', 'Resultado ajustado'); grid; % Teste 3, inclinção 0 w = 30 rpm massa3=[ ]; figure; plot(t,massa3,'*r'); xlabel('tempo (s)'); ylabel('massa (kg)'); legend('resulatdo Experimental'); grid; retamassa3=polyfit(t,massa3,1) %para ajustar os coeficientes do polinômio, neste caso grau 1 Massajuste3= polyval(retamassa3,t);%gera os coeficientes figure; plot(t,massa3,'*r', t, Massajuste3,'b'); xlabel('tempo (s)'); ylabel('massa (kg)'); legend('resulatdo Experimental', 'Resultado ajustado'); grid;
99 99 APÊNDICE B Programa para Ajuste da Curva de Atrito ao Mapa Estático de Atrito %Programa para calcular o mapa estático do Atrito close all clear all clc global Tc Ts load DadosAtritoHidraulicoSEMCARGA %Tatr=T2 waj=(0:0.0001:14); waj1=(0:0.0001:14); Ts=5.5; Tc=3.8;%13 Ts_cheio=4.7; Tc_cheio=4.7; beta0=[ ]; bet0=[ ]; [beta]=nlinfit(w2,t2_vazio,'fatrito',beta0) [bet]=nlinfit(w2_cheio,t2_cheio,'fatrito1',bet0) figure; plot(w2_cheio,t2_cheio,'rs',waj,fatrito1(bet,waj1),'- k',w2,t2_vazio,'o',waj,fatrito(beta,waj),'-k') title('ajuste Atrito'); xlabel('velocidade Angular w_2 (rad/s)'); ylabel('torque de atrito_2 (N.m)'); legend('torque CHEIO','Ajuste atrito','torque VAZIO') grid; %Fatrito1 function [y]=fatrito1(bet,x); global A B y=(a+(b-a)*exp(-(x/bet(1)).^2))+bet(2)*x; %Fatrito function [y]=fatrito(beta,x); global Tc Ts y=(tc+(ts-tc)*exp(-(x/beta(1)).^2))+beta(2)*x;
100 100 APÊNDICE C Programa para processamento dos testes experimentais em bancada instrumentalizada % Processa experimento dosador % Ronei, Maurício e Valdiero % data: 01/11/2016 % testes de 18/04/2016 clear all; close all; clc vetorw2_cheio=[]; vetort2med_cheio=[]; vetort2min_cheio=[]; vetort2max_cheio=[]; D=(37.5)*1e-6; %m3/rot %Teste 1 em cheio 30 rpm %Relação entre as polias n1/n2 = 0.8 (Polia n1=200mm e n2=250mm) %------cheio load t22cheio70rpm18abr16.mat; t22cheio70rpm18abr16 t=double(t22cheio70rpm18abr16.x.data'); t22cheio70rpm18abr16.y.name pa=double(t22cheio70rpm18abr16.y(3).data'); ps=double(t22cheio70rpm18abr16.y(4).data'); deltap=ps-pa; Teta1=double(t22cheio70rpm18abr16.Y(6).Data'); Phe1=double(t22cheio70rpm18abr16.Y(2).Data'); Texp=double(t22cheio70rpm18abr16.Y(9).Data'); figure; plot(t,pa,'r',t,ps,'k',t,deltap,'b'); legend('pa','ps','deltap_{valvula}'); ylabel('pressão (bar)'); xlabel('tempo t (s)'); grid; title('comportamento Pressão SEM carga'); figure; plot(t,teta1); %legend('pa','ps','deltap_{valvula}'); ylabel('deslocamento angular (rad)'); xlabel('tempo t (s)'); grid; title('comportamento deslcomaneto angular SEM carga'); %axis([ ]); ti=20; tf=120;
101 101 [N,M]=size(t); Achouti=0; Achoutf=0; for I = 1:N, if Achouti==0, if t(i)>ti Indiceti=I; Achouti=1; end end if Achoutf==0, if t(i)>tf Indicetf=I; Achoutf=1; end end end %for tss=t(indiceti:indicetf); pass=pa(indiceti:indicetf); psss=ps(indiceti:indicetf); Teta1ss=Teta1(Indiceti:Indicetf); deltapss=deltap(indiceti:indicetf); pamed=mean(pass); retateta1ss=polyfit(tss,teta1ss,1); Teta1ssajuste= polyval(retateta1ss,tss); w1ss=retateta1ss(1); w2=w1ss*0.8; n1rpm=w1ss*60/2/pi; Q1ss=D*n1rpm/60; Q=D*w1ss/(2*pi); Qlpm=Q1ss*1000*60; Ph1=pass*1e5*Q1ss; Ph1ss=pamed*1e5*Q1ss; %potência hidráulica média (Watts) Ph1max=Q1ss*max(pass)*1e5; Ph1min=Q1ss*min(pass)*1e5%potência hidráulica máxima (Watts) Ph14=pa14*1e5*Q14ss; Tmotor=mean(Ph1)/w1ss; T1=Ph1ss/(w1ss*0.8); %torque (N.m) n2rpm=n1rpm*(0.8); T2med=(mean(Ph1))/w2; T2min=(min(Ph1))/w2; T2max=(max(Ph1))/w2; vetorw2cheio_=[vetorw2_cheio w2]; vetorw2_cheio=[vetorw2_cheio T2med]; vetort2med_cheio=[vetort2med_cheio T2med ]; vetort2min_cheio=[vetort2min_cheio T2min]; vetort2max_cheio=[vetort2max_cheio T2max]; figure; plot(tss,teta1ss,'*:b',tss,teta1ssajuste,'r'); title('gráfico '); xlabel('tempo (s)'); grid;
102 102 legend('teta(rad)experimental','teta(rad)ajuste'); %axis([ ]); % figure; % plot(tss, Ph1, t, Phe1); % legend('calculado','teste'); % ylabel('ph (W)'); % xlabel('tempo t (s)'); % grid; % title('comportamento potência hidráulica SEM carga'); % axis([ ]); figure; plot(tss,pass,'r',tss,psss,'k',tss,deltapss,'b'); legend('pa','ps','deltap_{valvula}'); ylabel('pressão (bar)'); xlabel('tempo t (s)'); grid; title('comportamento Pressão SEM carga do trecho escolhido'); %axis([ ]); figure; plot(tss, Ph1); % legend('calculado','teste'); ylabel('ph (W)'); xlabel('tempo t (s)'); grid; title('comportamento potência hidráulica SEM carga do trecho escolhido no motor (n_1)'); %axis([ ]); figure; plot(tss, Ph1/w2,'r'); % legend('calculado','teste'); ylabel('ph (W)'); xlabel('tempo t (s)'); grid; title('comportamento do Torque SEM carga do trecho escolhido no eixo da dosadora de adubo (n_2)'); save dadosatritocheio18fev17 T2med T2min T2max pamed w1ss w2 Tmotor
103 103 APÊNDICE D PROGRAMA GERADOR DE DADOS PARA SIMULAÇÃO COMPUTACIONAL % Dados para simulação computacional % Ronei clear all close all clc %para a %D=37.5*e-6; Ieq= ; % Momento de inércia % B=13; %coeficiente de atrito N.m wi=0; Tm=7.7675;%força de torque em N.m Tc=4.7% 21 %20%24 %25 %18 %13 Ts=4.7 %210 %260 ws=0.1 %1 %2 sigma2=0.3265; %coeficiente de atrito viscoso N.m.seg/rad tetai=0; %Gráficos da validação matemática load dadosexperimentais figure erro=teta-(teta13*0.8); plot(tout,teta,'r',t,teta13*0.8,'b',tout,erro,'g') grid Xlabel('tempo (s)'); Ylabel('deslocamento angular (rad)'); legend('simulação','experimento'); %axis([ ])

104 ANEXO A CATÁLOGO DO MOTOR HIDRÁULICO 104
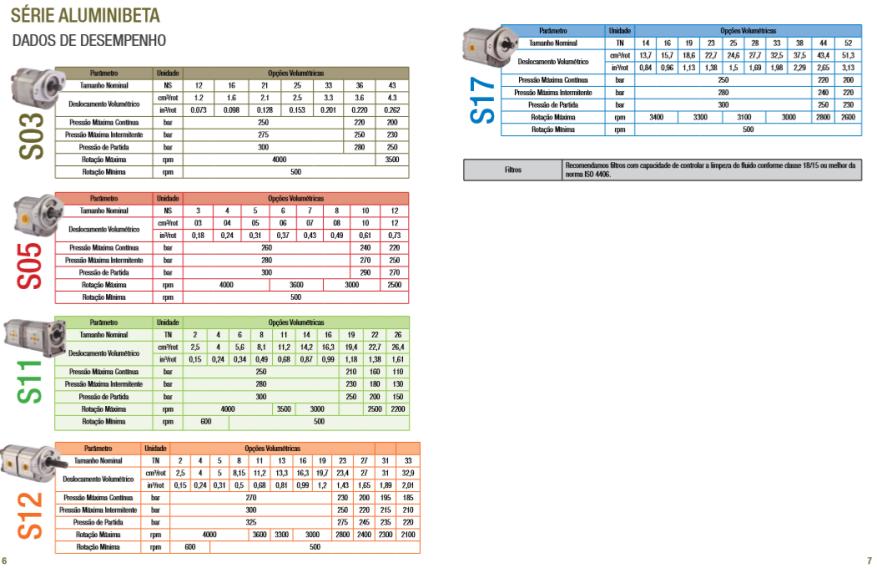
105 105

106 ANEXO B CATÁLOGO DAS VÁLVULAS 106
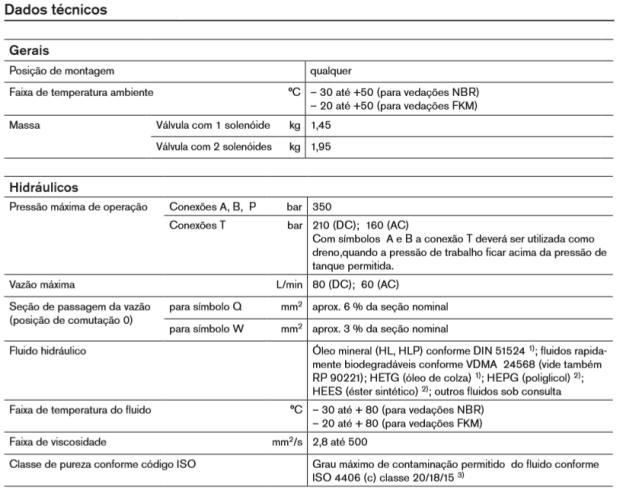
107 107
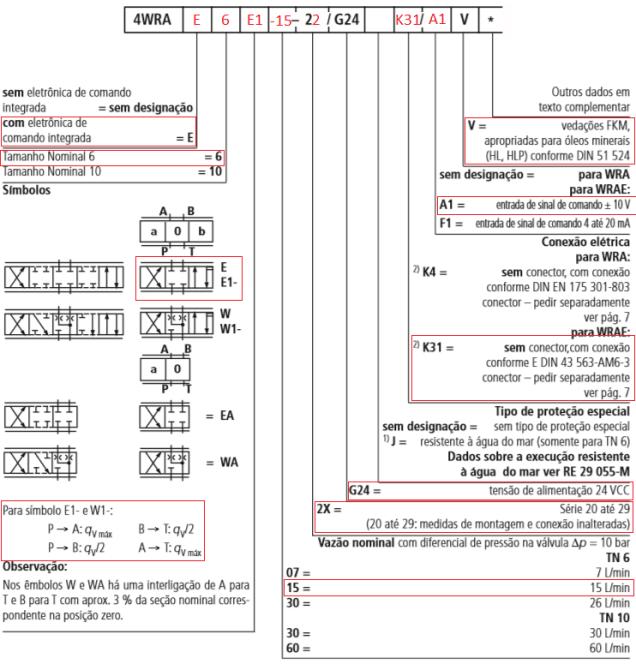
108 108
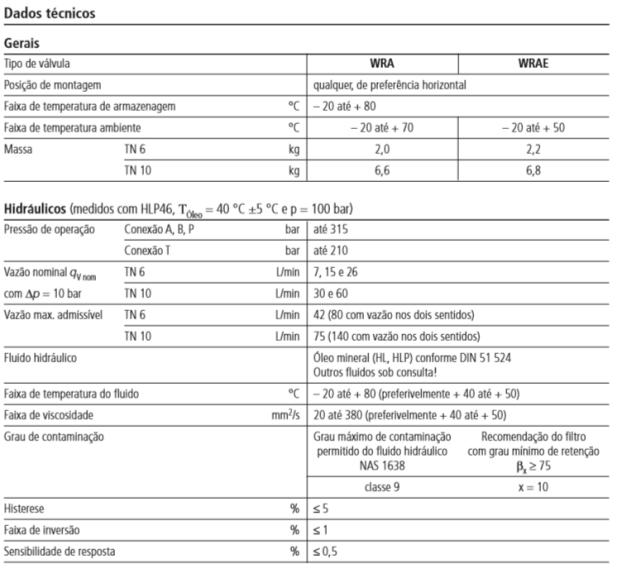
109 109
DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1
 DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1 Felipe Ricardo Engelmann 2, Valdomiro Petry 3, Antonio Carlos Valdiero 4, Luiz Antônio Rasia 5. 1 Resultados
DESENVOLVIMENTO E CONSTRUÇÃO DE UMA BANCADA COM MOTOR HIDRÁULICO INSTRUMENTALIZADA PARA TESTES 1 Felipe Ricardo Engelmann 2, Valdomiro Petry 3, Antonio Carlos Valdiero 4, Luiz Antônio Rasia 5. 1 Resultados
EXPERIMENTAL TESTS OF POWER CONSUMPTION ON THE DRIVE SHAFT OF A VARIABLE RATE FERTILIZER FOR USE IN PRECISION AGRICULTURE
 TESTES EXPERIMENTAIS DO CONSUMO DE POTÊNCIA NO EIXO DE ACIONAMENTO DE UMA ADUBADORA A TAXA VARIÁVEL PARA USO NA AGRICULTURA DE PRECISÃO ANTONIO CARLOS VALDIERO 1, RONEI OSVALDO ZIECH 2, MAURÍCIO DA SILVA
TESTES EXPERIMENTAIS DO CONSUMO DE POTÊNCIA NO EIXO DE ACIONAMENTO DE UMA ADUBADORA A TAXA VARIÁVEL PARA USO NA AGRICULTURA DE PRECISÃO ANTONIO CARLOS VALDIERO 1, RONEI OSVALDO ZIECH 2, MAURÍCIO DA SILVA
AGRICULTURA DE PRECISÃO
 AGRICULTURA DE PRECISÃO Tipos de controladores Estes controladores nada mais são do que microprocessadores que utilizam a informação (ou dos sensores em tempo real ou da leitura do mapa da variabilidade
AGRICULTURA DE PRECISÃO Tipos de controladores Estes controladores nada mais são do que microprocessadores que utilizam a informação (ou dos sensores em tempo real ou da leitura do mapa da variabilidade
Mestrado em Modelagem Matemática. Mauricio da Silva Pinto
 UNIJUÍ - Universidade Regional do Noroeste do Estado do Rio Grande do Sul PROGRAMA DE PÓS-GRADUAÇÃO STRICTO SENSU EM MODELAGEM MATEMÁTICA Mestrado em Modelagem Matemática Mauricio da Silva Pinto MODELAGEM
UNIJUÍ - Universidade Regional do Noroeste do Estado do Rio Grande do Sul PROGRAMA DE PÓS-GRADUAÇÃO STRICTO SENSU EM MODELAGEM MATEMÁTICA Mestrado em Modelagem Matemática Mauricio da Silva Pinto MODELAGEM
Agricultura de Precisão. EAD CR Campeiro7 Edição 2015
 Agricultura de Precisão EAD CR Campeiro7 Edição 2015 EAD CR CAMPEIRO 7 Agricultura de Precisão Prof. Dr. Enio Giotto Departamento de Engenharia Rural Centro de Ciências Rurais Universidade Federal de Santa
Agricultura de Precisão EAD CR Campeiro7 Edição 2015 EAD CR CAMPEIRO 7 Agricultura de Precisão Prof. Dr. Enio Giotto Departamento de Engenharia Rural Centro de Ciências Rurais Universidade Federal de Santa
ESTUDO E PROJETO DE UM ROBÔ ACIONADO PNEUMATICAMENTE PARA APLICAÇÃO INDUSTRIAL 1
 ESTUDO E PROJETO DE UM ROBÔ ACIONADO PNEUMATICAMENTE PARA APLICAÇÃO INDUSTRIAL 1 Djonatan Ritter 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Ismael Barbieri Garlet 5, Cláudio Da Silva Dos Santos
ESTUDO E PROJETO DE UM ROBÔ ACIONADO PNEUMATICAMENTE PARA APLICAÇÃO INDUSTRIAL 1 Djonatan Ritter 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Ismael Barbieri Garlet 5, Cláudio Da Silva Dos Santos
DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Leonardo Bortolon Maraschin 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional
DESAFIOS DA MODELAGEM MATEMÁTICA DE UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Leonardo Bortolon Maraschin 2, Antonio Carlos Valdiero 3, Luiz Antonio Rasia 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional
Acadêmica do Curso de Engenharia Mecânica, Bolsista de Iniciação Científica PROBIC/FAPERGS, 3
 IDENTIFICAÇÃO EXPERIMENTAL DOS PARÂMETROS DE ATRITO EM ATUADORES PNEUMÁTICOS DE UMA BANCADA PARA TESTES DE CONTROLE DE FORÇA 1 EXPERIMENTAL IDENTIFICATION OF THE FRICTION PARAMETERS IN PNEUMATIC ACTUATORS
IDENTIFICAÇÃO EXPERIMENTAL DOS PARÂMETROS DE ATRITO EM ATUADORES PNEUMÁTICOS DE UMA BANCADA PARA TESTES DE CONTROLE DE FORÇA 1 EXPERIMENTAL IDENTIFICATION OF THE FRICTION PARAMETERS IN PNEUMATIC ACTUATORS
REPROJETO DE UM ROBÔ DO TIPO GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 REPROJETO DE UM ROBÔ DO TIPO GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Cristiano Rafael Lopes 3, Leonardo Bortolon Maraschin 4, Luiz Antonio Rasia 5, Antonio Carlos Valdiero 6. 1 Projeto
REPROJETO DE UM ROBÔ DO TIPO GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Cristiano Rafael Lopes 3, Leonardo Bortolon Maraschin 4, Luiz Antonio Rasia 5, Antonio Carlos Valdiero 6. 1 Projeto
Agricultura de Precisão situação e tendências
 Agricultura de Precisão situação e tendências Seminário de Agricultura de Precisão 2012 José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br O que é Agricultura de Precisão? Diferentemente
Agricultura de Precisão situação e tendências Seminário de Agricultura de Precisão 2012 José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br O que é Agricultura de Precisão? Diferentemente
Álvaro V. Resende Embrapa Milho e Sorgo
 Álvaro V. Resende Embrapa Milho e Sorgo Conceito de Agricultura de Precisão (AP) Premissas da AP Evolução da AP no Brasil Fertilidade do solo manejada por AP Perspectivas em busca da sustentabilidade Conjunto
Álvaro V. Resende Embrapa Milho e Sorgo Conceito de Agricultura de Precisão (AP) Premissas da AP Evolução da AP no Brasil Fertilidade do solo manejada por AP Perspectivas em busca da sustentabilidade Conjunto
Mapeamento de colheita para Agricultura de Precisão
 Mapeamento de colheita para Agricultura de Precisão Prof. Dr. Rouverson Pereira da Silva Prof. Dr. Cristiano Zerbato LABORATÓRIO DE MÁQUINAS E MECANIZAÇÃO AGRÍCOLA Quais são as dificuldades atuais da mecanização?
Mapeamento de colheita para Agricultura de Precisão Prof. Dr. Rouverson Pereira da Silva Prof. Dr. Cristiano Zerbato LABORATÓRIO DE MÁQUINAS E MECANIZAÇÃO AGRÍCOLA Quais são as dificuldades atuais da mecanização?
PRIMA SUPER e CERES SUPER. Grandes semeadoras para culturas de inverno
 PRIMA SUPER e CERES SUPER Grandes semeadoras para culturas de inverno PRIMA SUPER A Prima Super é uma semeadora para culturas de inverno. Sua principal característica é a uniformidade no plantio, pois
PRIMA SUPER e CERES SUPER Grandes semeadoras para culturas de inverno PRIMA SUPER A Prima Super é uma semeadora para culturas de inverno. Sua principal característica é a uniformidade no plantio, pois
Experiencias y Actualidad de la Agricultura de Precisión en Brasil
 Eng. Agr. Fabiano Paganella Experiencias y Actualidad de la Agricultura de Precisión en Brasil Contato: 54-3232-3516 ou 54-9973-1253 fabiano@plantecvacaria.com.br Amostragem de solo georreferenciada
Eng. Agr. Fabiano Paganella Experiencias y Actualidad de la Agricultura de Precisión en Brasil Contato: 54-3232-3516 ou 54-9973-1253 fabiano@plantecvacaria.com.br Amostragem de solo georreferenciada
Tecnologias da Geoinformação aplicadas a Agricultura de Precisão. EAD CR Campeiro7 Edição 2015
 Tecnologias da Geoinformação aplicadas a Agricultura de Precisão EAD CR Campeiro7 Edição 2015 Fonte - AGCO Como a agricultura de precisão ainda é considerada por muitos no Brasil A agricultura de precisão
Tecnologias da Geoinformação aplicadas a Agricultura de Precisão EAD CR Campeiro7 Edição 2015 Fonte - AGCO Como a agricultura de precisão ainda é considerada por muitos no Brasil A agricultura de precisão
PRIMA SUPER e CERES SUPER. Grandes semeadoras para culturas de inverno
 PRIMA SUPER e CERES SUPER Grandes semeadoras para culturas de inverno Catálogo Português Abr/2016 PRIMA SUPER A Prima Super é uma semeadora para culturas de inverno. Sua principal característica é a uniformidade
PRIMA SUPER e CERES SUPER Grandes semeadoras para culturas de inverno Catálogo Português Abr/2016 PRIMA SUPER A Prima Super é uma semeadora para culturas de inverno. Sua principal característica é a uniformidade
Fundamentos da Agricultura de Precisão
 Fundamentos da Agricultura de Precisão O que é Agricultura de Precisão (AP)? Consideração da variabilidade espacial e temporal dos atributos relativos à cultura (solo, sanidade, ataque de pragas, produtividade,
Fundamentos da Agricultura de Precisão O que é Agricultura de Precisão (AP)? Consideração da variabilidade espacial e temporal dos atributos relativos à cultura (solo, sanidade, ataque de pragas, produtividade,
DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1
 DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Ivan Junior Mantovani 3, Felipe Oliveira Bueno 4, Antonio Carlos Valdiero 5.
DESENVOLVIMENTO DE UMA GARRA ROBÓTICA DO TIPO VENTOSA PARA UM ROBÔ GANTRY COM ACIONAMENTO PNEUMÁTICO 1 Andrei Fiegenbaum 2, Ivan Junior Mantovani 3, Felipe Oliveira Bueno 4, Antonio Carlos Valdiero 5.
ESTUDO DA MODELAGEM DINÂMICA DO PÊNDULO SIMPLES 1
 ESTUDO DA MODELAGEM DINÂMICA DO PÊNDULO SIMPLES 1 Saul Vione Winik 2, Ricardo Klein Lorenzoni 3, Antonio Carlos Valdiero 4, Dyenifer Peralta Teichmann 5, Victor Noster Kürschner 6, Lucas Da Rosa Kieslich
ESTUDO DA MODELAGEM DINÂMICA DO PÊNDULO SIMPLES 1 Saul Vione Winik 2, Ricardo Klein Lorenzoni 3, Antonio Carlos Valdiero 4, Dyenifer Peralta Teichmann 5, Victor Noster Kürschner 6, Lucas Da Rosa Kieslich
Quem Somos. Diferencial. O que fazemos. Cases. Como fazemos. Clientes e Parceiros. Entregáveis e Benefícios. Contato
 Quem Somos O que fazemos Diferencial Cases Como fazemos Clientes e Parceiros Entregáveis e Benefícios Contato Quem Somos A CROPMAN foi fundada por especialistas com destacada formação técnica/professional
Quem Somos O que fazemos Diferencial Cases Como fazemos Clientes e Parceiros Entregáveis e Benefícios Contato Quem Somos A CROPMAN foi fundada por especialistas com destacada formação técnica/professional
TECNOLOGIAS INOVADORAS PARA A AGRICULTURA FAMILIAR 1 INNOVATIVE TECHNOLOGIES FOR FAMILY AGRICULTURE
 TECNOLOGIAS INOVADORAS PARA A AGRICULTURA FAMILIAR 1 INNOVATIVE TECHNOLOGIES FOR FAMILY AGRICULTURE Ben-Hur Ribas Maciel 2, Rosângela Rommel Regner 3, Felipe Oliveira Bueno 4, Giovani Prates Bisso Dambroz
TECNOLOGIAS INOVADORAS PARA A AGRICULTURA FAMILIAR 1 INNOVATIVE TECHNOLOGIES FOR FAMILY AGRICULTURE Ben-Hur Ribas Maciel 2, Rosângela Rommel Regner 3, Felipe Oliveira Bueno 4, Giovani Prates Bisso Dambroz
PROJETO CONCEITUAL DE DOSADOR A TAXA VARIÁVEL COM ACIONAMENTO ELÉTRICO 1 CONCEPTUAL DESIGN OF A VARIABLE RATE DOSER WITH ELECTRIC OPERATION
 PROJETO CONCEITUAL DE DOSADOR A TAXA VARIÁVEL COM ACIONAMENTO ELÉTRICO 1 CONCEPTUAL DESIGN OF A VARIABLE RATE DOSER WITH ELECTRIC OPERATION Giovani Prates Bisso Dambroz 2, Ivan Junior Mantovani 3, Felipe
PROJETO CONCEITUAL DE DOSADOR A TAXA VARIÁVEL COM ACIONAMENTO ELÉTRICO 1 CONCEPTUAL DESIGN OF A VARIABLE RATE DOSER WITH ELECTRIC OPERATION Giovani Prates Bisso Dambroz 2, Ivan Junior Mantovani 3, Felipe
INSTRUMENTAÇÃO MECATRÔNICA
 CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
SOLUÇÃO DE MAPEAMENTO AÉREO BEMBRAS AGRO
 SOLUÇÃO DE MAPEAMENTO AÉREO BEMBRAS AGRO 1 1 ENTENDEMOS AS SUAS NECESSIDADES. 2 DEFINIMOS UM PLANO DE AÇÃO. 3 MAPEAMOS O SEU TALHÃO DE INTERESSE. 4 TECNOLOGIA DO CÉU AO TRATOR Através de mapas e relatórios
SOLUÇÃO DE MAPEAMENTO AÉREO BEMBRAS AGRO 1 1 ENTENDEMOS AS SUAS NECESSIDADES. 2 DEFINIMOS UM PLANO DE AÇÃO. 3 MAPEAMOS O SEU TALHÃO DE INTERESSE. 4 TECNOLOGIA DO CÉU AO TRATOR Através de mapas e relatórios
Mecanização e a agricultura de precisão
 LER 432 Máquinas e Implementos Agrícolas Mecanização e a agricultura de precisão José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br Objetivo Expor o contexto que envolve a agricultura
LER 432 Máquinas e Implementos Agrícolas Mecanização e a agricultura de precisão José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br Objetivo Expor o contexto que envolve a agricultura
ESTUDO DE UMA BANCADA PARA ENSAIO DE PÓRTICOS 1
 ESTUDO DE UMA BANCADA PARA ENSAIO DE PÓRTICOS 1 Liara Balbé Helgueira 2, Sandra Edinara Viecelli 3, Antonio Carlos Valdiero 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional desenvolvida no Núcleo de
ESTUDO DE UMA BANCADA PARA ENSAIO DE PÓRTICOS 1 Liara Balbé Helgueira 2, Sandra Edinara Viecelli 3, Antonio Carlos Valdiero 4, Angelo Fernando Fiori 5. 1 Pesquisa Institucional desenvolvida no Núcleo de
SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS - SIG
 SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS - SIG Prof. Dr. Cristiano Zerbato Prof. Dr. David L. Rosalen Agricultura de Precisão CONCEITOS AGRICULTURA DE PRECISÃO (AP) PRECISION AGRICULTURE or PRECISION FARM (PRECISION
SISTEMAS DE INFORMAÇÕES GEOGRÁFICAS - SIG Prof. Dr. Cristiano Zerbato Prof. Dr. David L. Rosalen Agricultura de Precisão CONCEITOS AGRICULTURA DE PRECISÃO (AP) PRECISION AGRICULTURE or PRECISION FARM (PRECISION
Agricultura de Precisão em Citros Mapeamento de Produtividade e Adubação em Taxas Variáveis
 André F. Colaço¹; José P. Molin² 01 Agricultura de Precisão em Citros Mapeamento de Produtividade e Adubação em Taxas Variáveis ¹ Eng. Agrônomo, MSc, Doutorando em Engenharia de Sistemas Agrícolas (USP-ESALQ);
André F. Colaço¹; José P. Molin² 01 Agricultura de Precisão em Citros Mapeamento de Produtividade e Adubação em Taxas Variáveis ¹ Eng. Agrônomo, MSc, Doutorando em Engenharia de Sistemas Agrícolas (USP-ESALQ);
IDENTIFICAÇÃO DE FATORES DA FERTILIDADE QUÍMICA DO SOLO INTERFERINDO NA PRODUTIVIDADE EM AGRICULTURA DE PRECISÃO
 IDENTIFICAÇÃO DE FATORES DA FERTILIDADE QUÍMICA DO SOLO INTERFERINDO NA PRODUTIVIDADE EM AGRICULTURA DE PRECISÃO ¹L.M.Gimenez, ²J.P. Molin (orientador): Departamento de Engenharia Rural ESALQ/USP As tentativas
IDENTIFICAÇÃO DE FATORES DA FERTILIDADE QUÍMICA DO SOLO INTERFERINDO NA PRODUTIVIDADE EM AGRICULTURA DE PRECISÃO ¹L.M.Gimenez, ²J.P. Molin (orientador): Departamento de Engenharia Rural ESALQ/USP As tentativas
Congresso Brasileiro de Agricultura de Precisão- ConBAP 2014 São Pedro - SP, 14 a 17 de setembro de 2014
 Congresso Brasileiro de Agricultura de Precisão- ConBAP 2014 São Pedro - SP, 14 a 17 de setembro de 2014 COMPARAÇÃO EM LARGA ESCALA ENTRE FERTILIZAÇÃO VARIÁVEL E CONVENCIONAL NA CULTURA DA LARANJA ANDRÉ
Congresso Brasileiro de Agricultura de Precisão- ConBAP 2014 São Pedro - SP, 14 a 17 de setembro de 2014 COMPARAÇÃO EM LARGA ESCALA ENTRE FERTILIZAÇÃO VARIÁVEL E CONVENCIONAL NA CULTURA DA LARANJA ANDRÉ
VICTÓRIA. Plantio com precisão para pequeno e médio produtor
 VICTÓRIA Plantio com precisão para pequeno e médio produtor Catálogo virtual Português Abr/2016 VICTÓRIA DPS As plantadoras Victória são pneumáticas, compactas e leves. Disponíveis na versão pivotada-pantográfica
VICTÓRIA Plantio com precisão para pequeno e médio produtor Catálogo virtual Português Abr/2016 VICTÓRIA DPS As plantadoras Victória são pneumáticas, compactas e leves. Disponíveis na versão pivotada-pantográfica
Modelagem Matemática e Validação Experimental de um Atuador Pneumático para uma Bancada de Ensaios de Estruturas¹ 1
 1 Modelagem Matemática e Validação Experimental de um Atuador Pneumático para uma Bancada de Ensaios de Estruturas¹ 1 Resumo O presente trabalho trata da validação experimental de um modelo matemático
1 Modelagem Matemática e Validação Experimental de um Atuador Pneumático para uma Bancada de Ensaios de Estruturas¹ 1 Resumo O presente trabalho trata da validação experimental de um modelo matemático
Aluno do Curso de Graduação em Engenharia Mecânica,Voluntário em pesquisa, 3
 PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA EXPERIMENTAL PARA TESTES DE VALIDAÇÃO DA DINÂMICA DE FLUIDOS 1 COMPUTER AIDED DESIGN OF A EXPERIMENTAL BENCH FOR VALIDATION TESTS OF FLUID DYNAMICS Ben-Hur
PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA EXPERIMENTAL PARA TESTES DE VALIDAÇÃO DA DINÂMICA DE FLUIDOS 1 COMPUTER AIDED DESIGN OF A EXPERIMENTAL BENCH FOR VALIDATION TESTS OF FLUID DYNAMICS Ben-Hur
DESENVOLVIMENTO DE MÓDULOS ROBÓTICOS DIDÁTICOS COM AUXÍLIO DE UM SISTEMA CAD/CAM 1
 DESENVOLVIMENTO DE MÓDULOS ROBÓTICOS DIDÁTICOS COM AUXÍLIO DE UM SISTEMA CAD/CAM 1 Odmartan Ribas Maciel 2, Ivan Junior Mantovani 3, João Paulo Weselovski Da Silva 4, Mônica Raquel Alves 5, Antonio Carlos
DESENVOLVIMENTO DE MÓDULOS ROBÓTICOS DIDÁTICOS COM AUXÍLIO DE UM SISTEMA CAD/CAM 1 Odmartan Ribas Maciel 2, Ivan Junior Mantovani 3, João Paulo Weselovski Da Silva 4, Mônica Raquel Alves 5, Antonio Carlos
Descrição do processo de Modelagem e Simulação em quatro etapas no ambiente AMESim
 Descrição do processo de Modelagem e Simulação em quatro etapas no ambiente AMESim Similarmente a outros softwares de modelagem e simulação, a utilização do sistema AMESim está baseada em quatro etapas:
Descrição do processo de Modelagem e Simulação em quatro etapas no ambiente AMESim Similarmente a outros softwares de modelagem e simulação, a utilização do sistema AMESim está baseada em quatro etapas:
VICTÓRIA. Plantio com precisão para pequeno e médio produtor
 VICTÓRIA Plantio com precisão para pequeno e médio produtor Catálogo virtual Português Ago/2016 VICTÓRIA DPS As plantadoras Victória são pneumáticas, compactas e leves. Disponíveis na versão pivotada-pantográfica
VICTÓRIA Plantio com precisão para pequeno e médio produtor Catálogo virtual Português Ago/2016 VICTÓRIA DPS As plantadoras Victória são pneumáticas, compactas e leves. Disponíveis na versão pivotada-pantográfica
O plantio compreende a colocação do órgão da planta no solo, de tal forma que ele tenha condição de germinar.
 SEMEADORAS 1 O plantio compreende a colocação do órgão da planta no solo, de tal forma que ele tenha condição de germinar. O órgão da planta utilizado para sua propagação pode ser: semente, tubérculo,
SEMEADORAS 1 O plantio compreende a colocação do órgão da planta no solo, de tal forma que ele tenha condição de germinar. O órgão da planta utilizado para sua propagação pode ser: semente, tubérculo,
Como oferecer serviços com as melhores técnicas para lucratividade aos produtores rurais e às empresas
 Painel Setorial 3: Desafios da prestação de serviços em AP Como oferecer serviços com as melhores técnicas para lucratividade aos produtores rurais e às empresas Lucas Rios do Amaral Professor, FEAGRI/UNICAMP
Painel Setorial 3: Desafios da prestação de serviços em AP Como oferecer serviços com as melhores técnicas para lucratividade aos produtores rurais e às empresas Lucas Rios do Amaral Professor, FEAGRI/UNICAMP
2 Fundamentos teóricos
 20 2 Fundamentos teóricos 2.1. Motores de passo Motores de passo são atuadores eletromecânicos incrementais não-lineares. Permitir um controle preciso de posição e velocidade, aliado a um baixo custo,
20 2 Fundamentos teóricos 2.1. Motores de passo Motores de passo são atuadores eletromecânicos incrementais não-lineares. Permitir um controle preciso de posição e velocidade, aliado a um baixo custo,
FARM SOLUTIONS TECNOLOGIA PARA COLETA DE DADOS, ANÁLISE E APLICAÇÃO DE SOLUÇÕES AGRONÔMICAS NAS LAVOURAS
 FARM SOLUTIONS o máximo em soluções agronômicas TECNOLOGIA PARA COLETA DE DADOS, ANÁLISE E APLICAÇÃO DE SOLUÇÕES AGRONÔMICAS NAS LAVOURAS FARM SOLUTIONS Tecnologia para coleta de dados, análise e aplicação
FARM SOLUTIONS o máximo em soluções agronômicas TECNOLOGIA PARA COLETA DE DADOS, ANÁLISE E APLICAÇÃO DE SOLUÇÕES AGRONÔMICAS NAS LAVOURAS FARM SOLUTIONS Tecnologia para coleta de dados, análise e aplicação
Aluno do Curso de Engenharia Elétrica da UNIJUÍ, 3
 GERAÇÃO DE MALHA DE UM SISTEMA REAL DE ARMAZENAGEM DE GRÃOS PARA A MODELAGEM MATEMÁTICA E SIMULAÇÃO 1 GENERATION OF MESH OF A REAL GRAIN STORAGE BINS SYSTEM FOR MATHEMATICAL MODELING AND SIMULATION Alexandre
GERAÇÃO DE MALHA DE UM SISTEMA REAL DE ARMAZENAGEM DE GRÃOS PARA A MODELAGEM MATEMÁTICA E SIMULAÇÃO 1 GENERATION OF MESH OF A REAL GRAIN STORAGE BINS SYSTEM FOR MATHEMATICAL MODELING AND SIMULATION Alexandre
Uso do GPS em atividades agropecuárias
 1/43 Uso do GPS em atividades agropecuárias Ferramentas e sistemas de posicionamento global para o agronegócio Msc. Marcelo Scantamburlo Denadai 2/43 Introdução Diversos métodos de localização já foram
1/43 Uso do GPS em atividades agropecuárias Ferramentas e sistemas de posicionamento global para o agronegócio Msc. Marcelo Scantamburlo Denadai 2/43 Introdução Diversos métodos de localização já foram
AGRICULTURA DE PRECISÃO
 AGRICULTURA DE PRECISÃO AGRICULTURA DE PRECISÃO A agricultura de precisão C.Vale é uma atividade que tem como objetivo aperfeiçoar o uso dos insumos agrícolas dentro da propriedade. Permite aplicação localizada
AGRICULTURA DE PRECISÃO AGRICULTURA DE PRECISÃO A agricultura de precisão C.Vale é uma atividade que tem como objetivo aperfeiçoar o uso dos insumos agrícolas dentro da propriedade. Permite aplicação localizada
Evento: XXV SEMINÁRIO DE INICIAÇÃO CIENTÍFICA
 DESENVOLVIMENTO E CONSTRUÇÃO DE UM MÓDULO DIDÁTICO DE AUTOMAÇÃO PNEUMÁTICA PARA CÉLULA DE MANUFATURA 1 DEVELOPMENT AND CONSTRUCTION OF A DIDACTIC AUTOMATION MODULE FOR MANUFACTURE CELL Odmartan Ribas Maciel
DESENVOLVIMENTO E CONSTRUÇÃO DE UM MÓDULO DIDÁTICO DE AUTOMAÇÃO PNEUMÁTICA PARA CÉLULA DE MANUFATURA 1 DEVELOPMENT AND CONSTRUCTION OF A DIDACTIC AUTOMATION MODULE FOR MANUFACTURE CELL Odmartan Ribas Maciel
PROJETO EM SISTEMAS MECÂNICOS, MECATRÔNICA E ROBÓTICA 1. Everton Luís Jahnel 2, Luiz Antonio Rasia 3.
 PROJETO EM SISTEMAS MECÂNICOS, MECATRÔNICA E ROBÓTICA 1 Everton Luís Jahnel 2, Luiz Antonio Rasia 3. 1 Projeto de pesquisa e desenvolvimento realizado no curso de graduação em Engenharia Elétrica 2 Aluno
PROJETO EM SISTEMAS MECÂNICOS, MECATRÔNICA E ROBÓTICA 1 Everton Luís Jahnel 2, Luiz Antonio Rasia 3. 1 Projeto de pesquisa e desenvolvimento realizado no curso de graduação em Engenharia Elétrica 2 Aluno
COMPARATIVO ENTRE MÉTODOS DE TRATAMENTO DE MAPAS DE PRODUTIVIDADE. Favoni, VA 1, Tedesco, DO 2, Tanaka, EM, 3
 COMPARATIVO ENTRE MÉTODOS DE TRATAMENTO DE MAPAS DE PRODUTIVIDADE Favoni, VA 1, Tedesco, DO 2, Tanaka, EM, 3 1 Discente do curso em Mecanização em Agricultura de precisão na FATEC Pompeia Shunji Nishimura,
COMPARATIVO ENTRE MÉTODOS DE TRATAMENTO DE MAPAS DE PRODUTIVIDADE Favoni, VA 1, Tedesco, DO 2, Tanaka, EM, 3 1 Discente do curso em Mecanização em Agricultura de precisão na FATEC Pompeia Shunji Nishimura,
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA
 CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
HiTech COMPACT Plantadora Adubadora *FOTO MERAMENTE ILUSTRATIVA.
 HiTech COMPACT Plantadora Adubadora *FOTO MERAMENTE ILUSTRATIVA. Duas opções no sistema de articulação da linha da semente PANTOGRÁFICA Linha da semente com sistema pantográfico dotado de amplo curso de
HiTech COMPACT Plantadora Adubadora *FOTO MERAMENTE ILUSTRATIVA. Duas opções no sistema de articulação da linha da semente PANTOGRÁFICA Linha da semente com sistema pantográfico dotado de amplo curso de
ESTUDO DA COMBUSTÃO DA OPERAÇÃO BICOMBUSTÍVEL DIESEL-ETANOL NUMA MÁQUINA DE COMPRESSÃO RÁPIDA
 ESTUDO DA COMBUSTÃO DA OPERAÇÃO BICOMBUSTÍVEL DIESEL-ETANOL NUMA MÁQUINA DE COMPRESSÃO RÁPIDA Aluno: Pedro Delbons Duarte de Oliveira Orientador: Carlos Valois Maciel Braga Introdução Em virtude da frequente
ESTUDO DA COMBUSTÃO DA OPERAÇÃO BICOMBUSTÍVEL DIESEL-ETANOL NUMA MÁQUINA DE COMPRESSÃO RÁPIDA Aluno: Pedro Delbons Duarte de Oliveira Orientador: Carlos Valois Maciel Braga Introdução Em virtude da frequente
Palavras-Chave: Controle de posição; Servoposicionador pneumático linear.
 APLICAÇÃO DA MODELAGEM MATEMÁTICA NA SIMULAÇÃO DO CONTROLE PROPORCIONAL DE UM ATUADOR PNEUMÁTICO1 Rozimerli Raquel Milbeier Richter 2, Camila Valandro Zamberlan 3, Antonio Carlos Valdiero 4. 1 Pesquisa
APLICAÇÃO DA MODELAGEM MATEMÁTICA NA SIMULAÇÃO DO CONTROLE PROPORCIONAL DE UM ATUADOR PNEUMÁTICO1 Rozimerli Raquel Milbeier Richter 2, Camila Valandro Zamberlan 3, Antonio Carlos Valdiero 4. 1 Pesquisa
DESEMPENHO DE UMA SEMEADORA-ADUBADORA UTILIZANDO UM SISTEMA DE DEPOSIÇÃO DE SEMENTES POR FITA.
 6ª Jornada Científica e Tecnológica e 3º Simpósio de Pós-Graduação do IFSULDEMINAS 04 e 05 de novembro de 2014, Pouso Alegre/MG DESEMPENHO DE UMA SEMEADORA-ADUBADORA UTILIZANDO UM SISTEMA DE DEPOSIÇÃO
6ª Jornada Científica e Tecnológica e 3º Simpósio de Pós-Graduação do IFSULDEMINAS 04 e 05 de novembro de 2014, Pouso Alegre/MG DESEMPENHO DE UMA SEMEADORA-ADUBADORA UTILIZANDO UM SISTEMA DE DEPOSIÇÃO
3 Equipamento de Cisalhamento Direto com Sucção Controlada da PUC-Rio
 3 Equipamento de Cisalhamento Direto com Sucção Controlada da PUC-Rio 3.1. Aspectos Históricos e Generalidades O estudo das características de resistência ao cisalhamento de solos não saturados tem sido
3 Equipamento de Cisalhamento Direto com Sucção Controlada da PUC-Rio 3.1. Aspectos Históricos e Generalidades O estudo das características de resistência ao cisalhamento de solos não saturados tem sido
UNIPORT 3000 NPK. Rua Dr. Luiz Miranda, Pompeia - SP - Tel. (14) Fax. (14)
 Fax. (14)") Rua Dr. Luiz Miranda, 1650-17580-000 - Pompeia - SP - Tel. (14) 3405 2100 - Fax. (14) 3452 1916 - E-mail: vendas@jacto.com.br PROTEJA O MEIO AMBIENTE. AO INUTILIZAR ESTE FOLHETO, NÃO JOGUE EM VIAS PÚBLICAS.
Rua Dr. Luiz Miranda, 1650-17580-000 - Pompeia - SP - Tel. (14) 3405 2100 - Fax. (14) 3452 1916 - E-mail: vendas@jacto.com.br PROTEJA O MEIO AMBIENTE. AO INUTILIZAR ESTE FOLHETO, NÃO JOGUE EM VIAS PÚBLICAS.
HÉRCULES e Precisão e alto rendimento na distribuição de corretivos e fertilizantes
 HÉRCULES 10000 e 24000 Precisão e alto rendimento na distribuição de corretivos e fertilizantes Catálogo virtual Português Mar/2016 HÉRCULES DE ARRASTO Os Hércules de arrasto são ideais para a distribuição
HÉRCULES 10000 e 24000 Precisão e alto rendimento na distribuição de corretivos e fertilizantes Catálogo virtual Português Mar/2016 HÉRCULES DE ARRASTO Os Hércules de arrasto são ideais para a distribuição
Aluno do Curso de Graduação em Engenharia Elétrica, bolsista PIBITI/CNPq 3
 BANCADA PARA VALIDAÇÃO EXPERIMENTAL DA MODELAGEM MATEMÁTICA DA DINÂMICA DA RODA DE TRAÇÃO DE UM VEÍCULO ELÉTRICO 1 EXPERIMENTAL VALIDATION BENCH OF THE MATHEMATICAL MODELING OF THE DRIVE WHEEL DYNAMICS
BANCADA PARA VALIDAÇÃO EXPERIMENTAL DA MODELAGEM MATEMÁTICA DA DINÂMICA DA RODA DE TRAÇÃO DE UM VEÍCULO ELÉTRICO 1 EXPERIMENTAL VALIDATION BENCH OF THE MATHEMATICAL MODELING OF THE DRIVE WHEEL DYNAMICS
PROJETO ASSISTIDO POR COMPUTADOR DE UM MANIPULADOR ROBÓTICO ACIONADO POR ATUADORES PNEUMÁTICOS 1
 PROJETO ASSISTIDO POR COMPUTADOR DE UM MANIPULADOR ROBÓTICO ACIONADO POR ATUADORES PNEUMÁTICOS 1 Pedro Felipe Sartori Da Rosa 2, Ismael Barbieri Garlet 3, Djonatan Ritter 4, Angelo Fernando Fiori 5, Antonio
PROJETO ASSISTIDO POR COMPUTADOR DE UM MANIPULADOR ROBÓTICO ACIONADO POR ATUADORES PNEUMÁTICOS 1 Pedro Felipe Sartori Da Rosa 2, Ismael Barbieri Garlet 3, Djonatan Ritter 4, Angelo Fernando Fiori 5, Antonio
Desafios Brasileiros: análise da possibilidade de difusão ampla Fábio Baio
 Conquistas e Desafios na Agricultura de Precisão Desafios Brasileiros: análise da possibilidade de difusão ampla Fábio Baio Agricultura de Precisão??? Conjunto de técnicas que permitem o gerenciamento
Conquistas e Desafios na Agricultura de Precisão Desafios Brasileiros: análise da possibilidade de difusão ampla Fábio Baio Agricultura de Precisão??? Conjunto de técnicas que permitem o gerenciamento
Capitulo 3 O Aparato Experimental
 Capitulo 3 O Aparato Experimental O presente capítulo tem como objetivo, descrever a RTC construída no Laboratório de Engenharia Química do Centro Universitário da FEI, contemplando a instrumentação, as
Capitulo 3 O Aparato Experimental O presente capítulo tem como objetivo, descrever a RTC construída no Laboratório de Engenharia Química do Centro Universitário da FEI, contemplando a instrumentação, as
SUA PRODUTIVIDADE GANHA FORÇA COM A SANTAL.
 SANTAL.COM.BR TRADIÇÃO DE ALTO DESEMPENHO. SUA PRODUTIVIDADE GANHA FORÇA COM A SANTAL. TECNOLOGIA RESULTADO COMPROVADO NO SETOR SUCROALCOOLEIRO. A Plantadora Santal PDM2 é mais um exemplo do espírito inovador
SANTAL.COM.BR TRADIÇÃO DE ALTO DESEMPENHO. SUA PRODUTIVIDADE GANHA FORÇA COM A SANTAL. TECNOLOGIA RESULTADO COMPROVADO NO SETOR SUCROALCOOLEIRO. A Plantadora Santal PDM2 é mais um exemplo do espírito inovador
CONSUMO DE TRATOR EQUIPADO COM SEMEADORA
 7ª Jornada Científica e Tecnológica e 4º Simpósio de Pós-Graduação do IFSULDEMINAS 12 e 13 de novembro de 2015, Poços de Caldas/MG CONSUMO DE TRATOR EQUIPADO COM SEMEADORA Gustavo R B MIRANDA 1 ; João
7ª Jornada Científica e Tecnológica e 4º Simpósio de Pós-Graduação do IFSULDEMINAS 12 e 13 de novembro de 2015, Poços de Caldas/MG CONSUMO DE TRATOR EQUIPADO COM SEMEADORA Gustavo R B MIRANDA 1 ; João
PRODUTIVIDADE DA BATATA, VARIEDADE ASTERIX, EM RESPOSTA A DIFERENTES DOSES DE NITROGÊNIO NA REGIÃO DO ALTO VALE DO ITAJAÍ-SC
 PRODUTIVIDADE DA BATATA, VARIEDADE ASTERIX, EM RESPOSTA A DIFERENTES DOSES DE NITROGÊNIO NA REGIÃO DO ALTO VALE DO ITAJAÍ-SC Francieli WEBER 1, Guilherme VITORIA 2, Rodrigo SALVADOR 2, Herberto Jose LOPES
PRODUTIVIDADE DA BATATA, VARIEDADE ASTERIX, EM RESPOSTA A DIFERENTES DOSES DE NITROGÊNIO NA REGIÃO DO ALTO VALE DO ITAJAÍ-SC Francieli WEBER 1, Guilherme VITORIA 2, Rodrigo SALVADOR 2, Herberto Jose LOPES
Fundamentos de Automação. Atuadores e Elementos Finais de Controle
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
O que é instrumentação INSTRUMENTAÇÃO E CONTROLE. Tubo de venturi. Ultrassônico carretel 22/2/2011. Introdução
 O que é instrumentação INSTRUMENTAÇÃO E CONTROLE Éaciênciaquedesenvolveeaplicatécnicasde medição, indicação, registro e controle de processos, visando a otimização e eficiência destes processos. Introdução
O que é instrumentação INSTRUMENTAÇÃO E CONTROLE Éaciênciaquedesenvolveeaplicatécnicasde medição, indicação, registro e controle de processos, visando a otimização e eficiência destes processos. Introdução
SOLUÇÃO DE AUTOMAÇÃO DE MÁQUINAS
 SOLUÇÃO DE AUTOMAÇÃO DE MÁQUINAS A REALIDADE DIGITAL NO CAMPO A Hexagon possui a solução mais completa do mercado para agricultura de precisão. Nossos produtos são ideais para monitorar e fazer a gestão
SOLUÇÃO DE AUTOMAÇÃO DE MÁQUINAS A REALIDADE DIGITAL NO CAMPO A Hexagon possui a solução mais completa do mercado para agricultura de precisão. Nossos produtos são ideais para monitorar e fazer a gestão
Departamento do Agronegócio Segurança Alimentar: O Desafio de Abastecer o Mundo com Sustentabilidade
 Segurança Alimentar: O Desafio de Abastecer o Mundo com Sustentabilidade O Mundo atravessa um período de aumento expressivo do consumo de alimentos, impulsionado pela melhora da renda das famílias dos
Segurança Alimentar: O Desafio de Abastecer o Mundo com Sustentabilidade O Mundo atravessa um período de aumento expressivo do consumo de alimentos, impulsionado pela melhora da renda das famílias dos
Correção da acidez subsuperficial no plantio direto pela aplicação de calcário na superfície e uso de plantas de cobertura e adubação verde
 Correção da acidez subsuperficial no plantio direto pela aplicação de calcário na superfície e uso de plantas de cobertura e adubação verde Julio Cezar Franchini Eleno Torres Luiz Gustavo Garbelini Mario
Correção da acidez subsuperficial no plantio direto pela aplicação de calcário na superfície e uso de plantas de cobertura e adubação verde Julio Cezar Franchini Eleno Torres Luiz Gustavo Garbelini Mario
LEVANTAMENTO DE ÁREA CULTIVADA, SEMEADURA E ADUBAÇÃO NO MILHO SAFRINHA NA REGIÃO DE SORRISO MT
 352 LEVANTAMENTO DE ÁREA CULTIVADA, SEMEADURA E ADUBAÇÃO NO MILHO SAFRINHA NA REGIÃO DE SORRISO MT Thiago Rodrigues Catapatti (1), Cassiano Spaziani Pereira (2) e André Carlesso (3) 1. Introdução O cultivo
352 LEVANTAMENTO DE ÁREA CULTIVADA, SEMEADURA E ADUBAÇÃO NO MILHO SAFRINHA NA REGIÃO DE SORRISO MT Thiago Rodrigues Catapatti (1), Cassiano Spaziani Pereira (2) e André Carlesso (3) 1. Introdução O cultivo
PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA AUTOMATIZADA PARA ALIMENTAÇÃO DE PEÇAS 1
 PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA AUTOMATIZADA PARA ALIMENTAÇÃO DE PEÇAS 1 Giovani Prates Bisso Dambroz 2, Ivan Junior Mantovani 3, Andrei Fiegenbaum 4, João Paulo Weselovski Da Silva 5,
PROJETO ASSISTIDO POR COMPUTADOR DE UMA BANCADA AUTOMATIZADA PARA ALIMENTAÇÃO DE PEÇAS 1 Giovani Prates Bisso Dambroz 2, Ivan Junior Mantovani 3, Andrei Fiegenbaum 4, João Paulo Weselovski Da Silva 5,
ESTUDO DAS CARACTERÍSTICAS DE UMA ESTRUTURA TIPO PÓRTICO 1
 ESTUDO DAS CARACTERÍSTICAS DE UMA ESTRUTURA TIPO PÓRTICO 1 Gabriele Cristina Prátzel 2, Pâmela Giuli Fleck Da Silva 3, Angela Andrea Dessbesell Benchimol Do Nascimento 4, Claudio Da Silva Dos Santos 5,
ESTUDO DAS CARACTERÍSTICAS DE UMA ESTRUTURA TIPO PÓRTICO 1 Gabriele Cristina Prátzel 2, Pâmela Giuli Fleck Da Silva 3, Angela Andrea Dessbesell Benchimol Do Nascimento 4, Claudio Da Silva Dos Santos 5,
MAPEAMENTO DOS ATRIBUTOS QUÍMICOS DO SOLO E DA PRODUTIVIDADE DA CULTURA DO MILHO EM SISTEMA DE AGRICULTURA DE PRECISÃO E CONVENCIONAL
 MAPEAMENTO DOS ATRIBUTOS QUÍMICOS DO SOLO E DA PRODUTIVIDADE DA CULTURA DO MILHO EM SISTEMA DE AGRICULTURA DE PRECISÃO E CONVENCIONAL Marlon GOEDE 1, Guilherme ANDRZEJEWSKI 2, Fabrício Campos MASIERO 3,
MAPEAMENTO DOS ATRIBUTOS QUÍMICOS DO SOLO E DA PRODUTIVIDADE DA CULTURA DO MILHO EM SISTEMA DE AGRICULTURA DE PRECISÃO E CONVENCIONAL Marlon GOEDE 1, Guilherme ANDRZEJEWSKI 2, Fabrício Campos MASIERO 3,
Tratamentos localizados
 Tratamentos localizados José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br Objetivo Abordar os temas relacionados aos equipamentos que permitem as intervenções localizadas para a aplicação
Tratamentos localizados José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br Objetivo Abordar os temas relacionados aos equipamentos que permitem as intervenções localizadas para a aplicação
CAPÍTULO I. 1 Introdução Motivação
 CAPÍTULO I 1 Introdução. 1.1. Motivação A busca por melhores eficiências, menor consumo de energia e maior conforto é cada vez mais um objetivo perseguido por todos. Os fabricantes de veículos não são
CAPÍTULO I 1 Introdução. 1.1. Motivação A busca por melhores eficiências, menor consumo de energia e maior conforto é cada vez mais um objetivo perseguido por todos. Os fabricantes de veículos não são
ADUBAÇÃO NPK DO ALGODOEIRO ADENSADO DE SAFRINHA NO CERRADO DE GOIÁS *1 INTRODUÇÃO
 Página 1495 ADUBAÇÃO NPK DO ALGODOEIRO ADENSADO DE SAFRINHA NO CERRADO DE GOIÁS *1 Maria da Conceição Santana Carvalho 1 ; Alexandre Cunha de Barcellos Ferreira 2 ; Ana Luiza Borin 2 1 Embrapa Arroz e
Página 1495 ADUBAÇÃO NPK DO ALGODOEIRO ADENSADO DE SAFRINHA NO CERRADO DE GOIÁS *1 Maria da Conceição Santana Carvalho 1 ; Alexandre Cunha de Barcellos Ferreira 2 ; Ana Luiza Borin 2 1 Embrapa Arroz e
Sustentabilidade dos Solos de Cerrado e Tráfico de Máquinas
 Sustentabilidade dos Solos de Cerrado e Tráfico de Máquinas Prof. Kléber Pereira Lanças FCA/UNESP Botucatu/SP GRUPO DE PESQUISA: Dr. Reginaldo Barbosa da Silva Doutorando Flávio José de Sousa Pereira Doutorando
Sustentabilidade dos Solos de Cerrado e Tráfico de Máquinas Prof. Kléber Pereira Lanças FCA/UNESP Botucatu/SP GRUPO DE PESQUISA: Dr. Reginaldo Barbosa da Silva Doutorando Flávio José de Sousa Pereira Doutorando
Agricultura de Precisão - escience
 Agricultura de Precisão - escience Paulo Graziano Processo: 2015/01587-0 São Paulo 29/11/2017 Agricultura de Precisão é... Fazer uso da Informação para melhorar o manejo e a eficiência da aplicação de
Agricultura de Precisão - escience Paulo Graziano Processo: 2015/01587-0 São Paulo 29/11/2017 Agricultura de Precisão é... Fazer uso da Informação para melhorar o manejo e a eficiência da aplicação de
hydrostec VÁLVULAS DE REGULAÇÃO MULTIJATO Atuador Redutor Transmissor de posição Suporte Arcada Corpo Eixo Placa móvel Placa fixa
 B30.15.0-P VÁLVULAS DE REGULAÇÃO ULTIJATO Regulação da vazão e pressão Atuador Redutor Transmissor de posição Suporte Arcada Corpo Eixo Placa móvel Placa fixa A Válvula Regulação ultijato, foi desenvolvida
B30.15.0-P VÁLVULAS DE REGULAÇÃO ULTIJATO Regulação da vazão e pressão Atuador Redutor Transmissor de posição Suporte Arcada Corpo Eixo Placa móvel Placa fixa A Válvula Regulação ultijato, foi desenvolvida
CONTROLE DA TEMPERATURA DE SECAGEM ARTIFICIAL DE GRÃOS 1
 CONTROLE DA TEMPERATURA DE SECAGEM ARTIFICIAL DE GRÃOS 1 Saul Vione Winik 2, Vanessa Faoro 3, Rodolfo França De Lima 4, Oleg Khatchatourian 5, Cristiano Osinski 6. 1 Projeto de Iniciação Científica 2 Bolsista
CONTROLE DA TEMPERATURA DE SECAGEM ARTIFICIAL DE GRÃOS 1 Saul Vione Winik 2, Vanessa Faoro 3, Rodolfo França De Lima 4, Oleg Khatchatourian 5, Cristiano Osinski 6. 1 Projeto de Iniciação Científica 2 Bolsista
PRINCESA. A plantadora que sua lavoura merece
 PRINCESA A plantadora que sua lavoura merece PRINCESA A Princesa é uma plantadora que veio para marcar um novo conceito em plantio. Indicada para o cultivo de milho, soja, feijão e algodão, ela chega no
PRINCESA A plantadora que sua lavoura merece PRINCESA A Princesa é uma plantadora que veio para marcar um novo conceito em plantio. Indicada para o cultivo de milho, soja, feijão e algodão, ela chega no
AVALIAÇÃO DO SISTEMA DE PLANTIO DIRETO DE MILHO EM TAXA VARIADA E ANALISE DA POLULAÇÃO DE PLANTAS EM RELAÇÃO AO AUMENTO DA VELOCIDADE DE SEMEADURA
 AVALIAÇÃO DO SISTEMA DE PLANTIO DIRETO DE MILHO EM TAXA VARIADA E ANALISE DA POLULAÇÃO DE PLANTAS EM RELAÇÃO AO AUMENTO DA VELOCIDADE DE SEMEADURA Santos, GML 1, Tedesco, DO 2, Favoni, VA 3 Tanaka, EM
AVALIAÇÃO DO SISTEMA DE PLANTIO DIRETO DE MILHO EM TAXA VARIADA E ANALISE DA POLULAÇÃO DE PLANTAS EM RELAÇÃO AO AUMENTO DA VELOCIDADE DE SEMEADURA Santos, GML 1, Tedesco, DO 2, Favoni, VA 3 Tanaka, EM
ANÁLISE DAS RELAÇÕES DE TROCA ENTRE FEIJÃO E SEUS PRINCIPAIS INSUMOS SOUZA, Rodrigo da Silva 1 ; WANDER, Alcido Elenor 2
 ANÁLISE DAS RELAÇÕES DE TROCA ENTRE FEIJÃO E SEUS PRINCIPAIS INSUMOS SOUZA, Rodrigo da Silva 1 ; WANDER, Alcido Elenor 2 Introdução É indiscutível a importância do feijão para o país. Sendo ele uma das
ANÁLISE DAS RELAÇÕES DE TROCA ENTRE FEIJÃO E SEUS PRINCIPAIS INSUMOS SOUZA, Rodrigo da Silva 1 ; WANDER, Alcido Elenor 2 Introdução É indiscutível a importância do feijão para o país. Sendo ele uma das
Encontro Brasileiro de Silvicultura Curitiba, Novembro de 2008.
 Encontro Brasileiro de Silvicultura Curitiba, Novembro de 2008. Aplicação de Formicidas Preparo de Solo Adubação de Base Plantio Mecanizado Adubações Complementares Aplicação de Herbicidas Colheita Geração
Encontro Brasileiro de Silvicultura Curitiba, Novembro de 2008. Aplicação de Formicidas Preparo de Solo Adubação de Base Plantio Mecanizado Adubações Complementares Aplicação de Herbicidas Colheita Geração
EFEITO E VIABILIDADE DA ADOÇÃO DE UM SISTEMA DE AGRICULTURA DE PRECISÃO PARA PEQUENAS PROPRIEDADES RESUMO
 EFEITO E VIABILIDADE DA ADOÇÃO DE UM SISTEMA DE AGRICULTURA DE PRECISÃO PARA PEQUENAS PROPRIEDADES Marlon GOEDE 1, Guilherme ANDRZEJEWSKI 2, Fabrício C. MASIERO 3, João Célio de ARAÚJO 4, Adelino do AMARAL
EFEITO E VIABILIDADE DA ADOÇÃO DE UM SISTEMA DE AGRICULTURA DE PRECISÃO PARA PEQUENAS PROPRIEDADES Marlon GOEDE 1, Guilherme ANDRZEJEWSKI 2, Fabrício C. MASIERO 3, João Célio de ARAÚJO 4, Adelino do AMARAL
AULA 9 ATUADORES ELÉTRICOS
 AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
Estado actual, avances y principales aplicaciones de la Agricultura de Precisión en Brasil
 Estado actual, avances y principales aplicaciones de la Agricultura de Precisión en Brasil José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br O que é Agricultura de Precisão? AP é
Estado actual, avances y principales aplicaciones de la Agricultura de Precisión en Brasil José P. Molin ESALQ/USP jpmolin@usp.br www.agriculturadeprecisao.org.br O que é Agricultura de Precisão? AP é
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA. SUBÁREA: Engenharias
 TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
MOVIMENTO E DINAMISMO
 SOBRE O GRUPO REDUTEP ACIONAMENTOS REDUTEP INTEGRADORA MOVIMENTO E DINAMISMO www.redutep.com.br O GRUPO Redutep Soluções Industriais A divisão Acionamentos oferece os mais variados produtos e acessórios
SOBRE O GRUPO REDUTEP ACIONAMENTOS REDUTEP INTEGRADORA MOVIMENTO E DINAMISMO www.redutep.com.br O GRUPO Redutep Soluções Industriais A divisão Acionamentos oferece os mais variados produtos e acessórios
MANEJO DE NUTRIENTES EM SISTEMAS DE PRODUÇÃO MANEJO DE NUTRIENTES EM SISTEMAS DE PRODUÇÃO. Manejo de nutrientes no algodoeiro nos solos de Mato Grosso
 MANEJO DE NUTRIENTES EM SISTEMAS DE PRODUÇÃO MANEJO DE NUTRIENTES EM SISTEMAS DE PRODUÇÃO Manejo de nutrientes no algodoeiro nos solos de Mato Grosso Leandro Zancanaro FUNDAÇÃO MT Foz do Iguaçu, 03 de
MANEJO DE NUTRIENTES EM SISTEMAS DE PRODUÇÃO MANEJO DE NUTRIENTES EM SISTEMAS DE PRODUÇÃO Manejo de nutrientes no algodoeiro nos solos de Mato Grosso Leandro Zancanaro FUNDAÇÃO MT Foz do Iguaçu, 03 de
n o máx zul min
 BOMBA DE PISTÃO VARIÁVEL PARA CIRCUITO ABERTO 1 - CARACTERÍSTICAS 2 - SIMBOLOGIA HIDRÁULICA - Bomba variável no tipo construtivo de pistões com disco inclinado para acionamentos hidrostáticos com circuito
BOMBA DE PISTÃO VARIÁVEL PARA CIRCUITO ABERTO 1 - CARACTERÍSTICAS 2 - SIMBOLOGIA HIDRÁULICA - Bomba variável no tipo construtivo de pistões com disco inclinado para acionamentos hidrostáticos com circuito
PRINCESA. A plantadora que sua lavoura merece
 PRINCESA A plantadora que sua lavoura merece PRINCESA A Princesa é uma plantadora que veio para marcar um novo conceito em plantio. Indicada para o cultivo de milho, soja, feijão e algodão, ela chega no
PRINCESA A plantadora que sua lavoura merece PRINCESA A Princesa é uma plantadora que veio para marcar um novo conceito em plantio. Indicada para o cultivo de milho, soja, feijão e algodão, ela chega no
DISTRIBUIÇÃO DE SEMENTES DE MILHO EM FUNÇÃO DA VELOCIDADE E DENSIDADE DE SEMEADURA INTRODUÇÃO
 DISTRIBUIÇÃO DE SEMENTES DE MILHO EM FUNÇÃO DA VELOCIDADE E DENSIDADE DE SEMEADURA DIAS, Vilnei de Oliveira 1, BONOTTO, Gustavo José 2, ALONÇO, Airton dos Santos 3, BAUMHARDT, Ulisses Benedetti 4, CORADINI,
DISTRIBUIÇÃO DE SEMENTES DE MILHO EM FUNÇÃO DA VELOCIDADE E DENSIDADE DE SEMEADURA DIAS, Vilnei de Oliveira 1, BONOTTO, Gustavo José 2, ALONÇO, Airton dos Santos 3, BAUMHARDT, Ulisses Benedetti 4, CORADINI,
SISTEMA DE DISTRIBUIÇÃO DAS SEMEADORAS DE LINHA DE PRECISÃO
 2ª parte semeadora SISTEMA DE DISTRIBUIÇÃO DAS SEMEADORAS DE LINHA DE PRECISÃO 2 A função deste sistema é selecionar as sementes individualmente do depósito numa taxa prédeterminada. Os principais sistemas
2ª parte semeadora SISTEMA DE DISTRIBUIÇÃO DAS SEMEADORAS DE LINHA DE PRECISÃO 2 A função deste sistema é selecionar as sementes individualmente do depósito numa taxa prédeterminada. Os principais sistemas
Evento: XXV SEMINÁRIO DE INICIAÇÃO CIENTÍFICA
 COLETA DE UM AMPLO CONJUNTO DE DADOS EXPERIMENTAIS DO TEMPO DE VIDA DE BATERIAS DE LÍTIO-ÍON POLÍMERO ATRAVÉS DE UMA PLATAFORMA DE TESTES E MODELAGEM MATEMÁTICA DOS DADOS UTILIZANDO MODELOS ELÉTRICOS.
COLETA DE UM AMPLO CONJUNTO DE DADOS EXPERIMENTAIS DO TEMPO DE VIDA DE BATERIAS DE LÍTIO-ÍON POLÍMERO ATRAVÉS DE UMA PLATAFORMA DE TESTES E MODELAGEM MATEMÁTICA DOS DADOS UTILIZANDO MODELOS ELÉTRICOS.
Como fazer a Agricultura de Precisão avançar no Brasil
 Como fazer a Agricultura de Precisão avançar no Brasil USP/ESALQ/LAP jpmolin@usp.br www.agriculturadeprecisao.org.br Roteiro Revendo os conceitos Breve histórico Mercado de AP Desafios e perspectivas As
Como fazer a Agricultura de Precisão avançar no Brasil USP/ESALQ/LAP jpmolin@usp.br www.agriculturadeprecisao.org.br Roteiro Revendo os conceitos Breve histórico Mercado de AP Desafios e perspectivas As
TRATORES/ SÉRIE TL TL60E TL75E TL85E TL95E TRATORES/ SÉRIE TL TL60E TL75E TL85E TL95E
 TRATORES/ SÉRIE TL TL60E TL75E TL85E TL95E TRATORES/ SÉRIE TL TL60E TL75E TL85E TL95E O TRATOR QUE VOCÊ CONHECE, AINDA MELHOR PARA A SUA LAVOURA. 2 MULTITAREFAS PARA OS SEUS DESAFIOS Um grande parceiro
TRATORES/ SÉRIE TL TL60E TL75E TL85E TL95E TRATORES/ SÉRIE TL TL60E TL75E TL85E TL95E O TRATOR QUE VOCÊ CONHECE, AINDA MELHOR PARA A SUA LAVOURA. 2 MULTITAREFAS PARA OS SEUS DESAFIOS Um grande parceiro
Página 1
 1. Analise as afirmativas a seguir sobre fluidos hidráulicos. I - É um meio de transmissão de energia, um lubrificante, um vedador e um veículo de transferência de calor. II - Quando formulado a partir
1. Analise as afirmativas a seguir sobre fluidos hidráulicos. I - É um meio de transmissão de energia, um lubrificante, um vedador e um veículo de transferência de calor. II - Quando formulado a partir
5 Concepção e Projeto da Bancada
 5 Concepção e Projeto da Bancada 5.1 Introdução O principal objetivo no projeto da bancada é simular o fenômeno da instabilidade em um rotor. O rotor foi desenvolvido a partir de um preexistente no Laboratório
5 Concepção e Projeto da Bancada 5.1 Introdução O principal objetivo no projeto da bancada é simular o fenômeno da instabilidade em um rotor. O rotor foi desenvolvido a partir de um preexistente no Laboratório
ABSOLUTA. Absolutamente eficiente no plantio de ponta a ponta
 ABSOLUTA Absolutamente eficiente no plantio de ponta a ponta ABSOLUTA A Absoluta é uma plantadora pneumática desenvolvida para oferecer agilidade e eficiência no plantio em áreas onde a fertilização do
ABSOLUTA Absolutamente eficiente no plantio de ponta a ponta ABSOLUTA A Absoluta é uma plantadora pneumática desenvolvida para oferecer agilidade e eficiência no plantio em áreas onde a fertilização do
Atuadores e Sistemas Hidráulicos
 1 Atuadores e Sistemas Hidráulicos Prof. Dr. Emílio Carlos Nelli Silva Aula 1 Escola Politécnica da USP Departamento de Engenharia Mecatrônica e Sistemas Mecânicos Introdução 2 Hidráulica é o ramo da engenharia
1 Atuadores e Sistemas Hidráulicos Prof. Dr. Emílio Carlos Nelli Silva Aula 1 Escola Politécnica da USP Departamento de Engenharia Mecatrônica e Sistemas Mecânicos Introdução 2 Hidráulica é o ramo da engenharia