Prof. Daniel Hasse. Robótica Industrial
|
|
|
- João Guilherme Abreu Castilho
- 10 Há anos
- Visualizações:
Transcrição
1 Prof. Daniel Hasse Robótica Industrial

2 Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras

3 Tipos de Sistemas de Controle (Robôs Manipuladores) Controle Ponto a Ponto - PTP O robô é capaz de se deslocar de um ponto para um qualquer outro ponto do seu volume de trabalho, sendo a trajetória e velocidade não controladas ao longo desse movimento. Trajetória Contínua - CP A trajetória é total ou parcial contínua, permitindo o controle do movimento e velocidade de cada eixo em simultâneo. Essencial para aplicações de pintura, solda, etc. Trajetória Controlada Possibilidade de gerar trajetórias com geometrias diferentes, como sejam linhas, círculos, curvas interpoladas. Apenas é necessário memorizar o ponto de início e o de fim da trajetória. Controle Inteligente Este tipo de controle de movimento permite ao robô ajustar as trajetórias por interação com o meio ambiente. Estas tomadas de decisões lógicas baseiam-se na informação recebida por sensores.

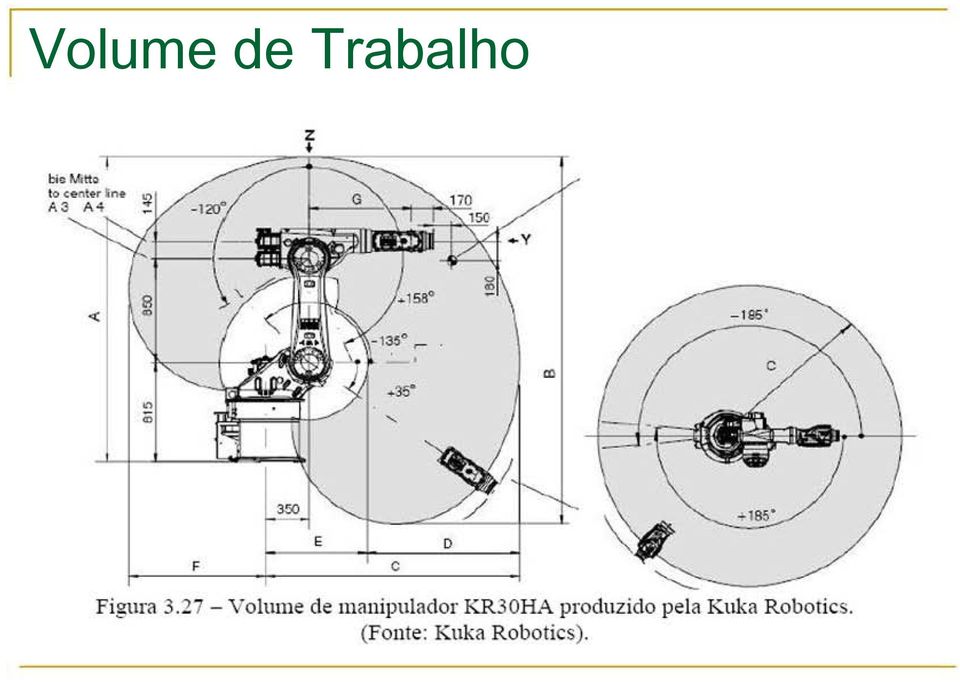
4 Volume de Trabalho O volume de trabalho é o termo que se refere ao espaço que um determinado braço consegue posicionar seu pulso. Este volume, em geral, é estabelecido conforme os limites impostos pelo projeto estrutural do braço, ou seja, a configuração física do braço robótico, os limites dos movimentos das juntas e o tamanho dos componentes do corpo, braço e pulso. Por exemplo, o volume de um manipulador cilíndrico deveria ser um cilindro, mas em geral não é. Em resumo, o volume de trabalho de um manipulador depende, basicamente, da configuração do braço, dos comprimentos dos elos (braço e punho) e de limites e restrições construtivas a movimentação das juntas.

5 Volume de Trabalho
6 Dinâmica do Braço Robótico O desempenho dinâmico do braço robótico está associado a velocidade de resposta, estabilidade e precisão. A velocidade de resposta refere-se a destreza do braço robótico ao mover-se de um lugar para outro num curto período de tempo. Desta forma, o torque existente em cada junta do braço e a aceleração em cada elo devem ser analisadas. Já a estabilidade pode ser estimada com base no tempo necessário para amortecer as oscilações que ocorrem durante o movimento de uma posição para a outra. Se a estabilidade for baixa pode-se aplicar elementos de amortecimento no braço, que melhoram a estabilidade, mas influem na velocidade de resposta. A precisão esta relacionada com a velocidade e estabilidade, pois é uma medida de erro na posição do órgão terminal.

7 Precisão dos Movimentos A precisão de movimento esta intrinsecamente correlacionada com três características, como segue: Resolução Espacial Menor incremento de movimento no qual o robô pode dividir a sua área de trabalho. Depende da resolução do sistema de controle e das imprecisões mecânicas do robô. Precisão Capacidade do robô atingir um ponto desejado. Mede a distância entre a posição especificada e a posição real atingida pelo robô. Repetibilidade Capacidade do robô se posicionar na mesma posição naquela que se posicionou anteriormente.

8 Sistemas de Acionamentos Os acionadores são dispositivos responsáveis pelo movimento das articulações e do desempenho dinâmico do robô. Esses dispositivos podem ser elétricos, hidráulicos ou pneumáticos, cada um com suas características. Acionamento Hidráulico Permite valores elevados de velocidade e de força A grande desvantagem é o seu elevado custo Preferíveis em ambientes nos quais os drives elétricos poderão causar incêndios, como seja na pintura Acionamento Elétrico Oferecem menor velocidade e força (comparativamente aos hidráulicos) Permitem maior precisão, maior repetibilidade e mais limpos na utilização Dois tipos de acionamentos elétricos: motores passo a passo (controle em malha fechada ou aberta) e servomotores DC (controle em malha fechada). Os últimos são os mais utilizados, permitindo movimentos controláveis de forma contínua e suave. Acionamento Pneumático Utilizado em robôs de pequeno porte e que possuam poucos graus de liberdade Baixo custo (mais econômico que os anteriores)
 Permitem maior precisão, maior repetibilidade e mais limpos na utilização Dois tipos de")
9 Acionamento Hidráulico Os principais componentes deste sistema são: motor, cilindro, bomba de óleo, válvula e tanque de óleo. O motor é responsável pelo fluxo de óleo no cilindro em direção ao pistão que movimenta a junta. Assim, este tipo de acionador é geralmente associado a robôs de maior porte, quando comparados aos acionadores pneumáticos e elétricos. Entretanto a precisão em relação aos acionadores elétricos é menor. Existem diversos tipos diferentes de motores hidráulicos, como motor de palheta, de engrenagem, de lóbulos, etc., e todos eles apresentam características de alto torque especifico, ou seja, torque elevado com massa e volume reduzidos. São, portanto, apropriados para braços que manipulam grandes cargas. Em contrapartida, a exigência de elementos de controle e pressurização do fluido hidráulico faz com que o custo destes sistemas seja elevado, tornando-se vantajoso apenas em braços de grande porte.

10 Acionamento Hidráulico Apresentam, adicionalmente, problemas de manutenção, já que podem ocorrer vazamentos do fluido e desgaste na bomba e motores. Deve ser mencionado, finalmente, que atuadores hidráulicos lineares são mais compactos e robustos do que seus equivalentes elétricos ou mesmo pneumáticos, e com isso são indicados para uso em robôs do tipo pórtico ou esféricos, que utilizam juntas prismáticas.

11 Acionadores Elétricos Geralmente robôs de tamanho pequeno a médio utilizam acionadores elétricos. Os acionadores elétricos mais comuns em uso nos robôs são: motor de corrente continua ou DC, servomotor e motor de passo. Esses tipos de acionadores não propiciam muita velocidade ou potência, quando comparados com acionadores hidráulicos, porem atingem maior precisão. Em geral são dotados de redutores para reduzir a velocidade e aumentar o torque. Acionamentos elétricos podem ser utilizados em juntas prismáticas, com a transformação do movimento rotativo do motor em movimento linear por meio de um fuso.

12 Acionadores Elétricos Motores elétricos lineares não são utilizados, pois produzem forças de pequena intensidade. O custo do acionamento elétrico cresce com o torque necessário para acionar o braço mecânico, já o tamanho do motor é praticamente proporcional ao conjugado produzido. Por outro lado, a simples redução da velocidade, por meio de redutor, embora propicie maior precisão e maior torque, reduz significativamente a produtividade. Maior torque significa maior velocidade ou maior carga, e ambos são desejáveis. O custo de acionadores hidráulicos cresce também com a demanda de torque, porem de forma mais lenta, já que tais motores tendem a ser mais compactos. Adicionalmente o custo dos equipamentos de condicionamento e controle do fluido hidráulico é alto e pouco influenciado pela escala. Isto indica, que o acionamento elétrico é mais vantajoso economicamente em braços de pequeno e médio porte, ao passo que o acionamento hidráulico é melhor quando se trata de gerar grandes potências e cargas.

13 Acionadores Elétricos Servo-motores Servo-motores são compostos por motores DC e um redutor de velocidade, junto com um sensor de posição e um sistema de controle re-alimentado. Em outras palavras, os servomotores podem ser considerados como sendo motores comandados em posição (angular ou linear), já que, do ponto de vista de quem os utiliza, o controle interno em malha fechada é irrelevante. Os servo-motores são pequenos, com ampla variação de torques. O mecanismo de posicionamento ajusta a posição angular por meio de um sinal codificado que lhe é enviado. Enquanto esse código estiver na entrada, o servo ira manter a sua posição angular. Em geral o sinal e do tipo PWM (Pulse Width Modulation), ou seja, a posição angular ira depender da largura do pulso enviado.

14 Acionadores Elétricos Motor de passo Os motores de passo são usados em aplicações de serviço relativamente leves e algumas das suas características de desempenho são apresentadas a seguir: Rotação em sentido horário e anti-horário; Variações incrementais de precisão angular; Repetição de movimentos bastante exatos; Baixo torque; Um torque de sustentação a velocidade zero; Possibilidade de controle digital. Os motores de passo podem ser bipolares ou unipolares. Em ambos os casos as fontes utilizadas são de tensão continua e requerem um circuito digital que produza as seqüências de sinais para que o motor funcione corretamente. A forma com que o motor ira operar dependera bastante do que se deseja controlar. Existem casos em que o torque é mais importante, em outras a precisão ou mesmo a velocidade são mais relevantes. Ao trabalhar com motores de passo, precisa-se de algumas características de funcionamento, como a tensão de alimentação, a máxima corrente elétrica suportada nas bobinas, o grau (precisão), o torque. Motores de passo podem ser acionados de diversas formas. As duas formas mais comuns são: passo completo e meio passo. No modo de operação em passo completo pode-se acionar apenas uma ou duas bobinas a cada passo. No primeiro caso apenas uma bobina é energizada a cada passo, o torque gerado é menor, assim como o consumo.

15 Acionadores Pneumáticos Os acionadores pneumáticos são semelhantes aos acionadores hidráulicos, porem a diferença é a utilização de ar ao invés de óleo. Entretanto o ar é altamente compressível, o que causa uma baixa precisão e força, mas estes acionadores possuem alta velocidade. Acionadores pneumáticos lineares (cilindros) requerem sistemas sofisticados e complexos para controlarem a posição em pontos ao longo do curso. Justamente por isso, são pouco utilizados em aplicações que tenham tal necessidade. Porem, diversas tarefas de produção podem ser automatizadas com atuadores pneumáticos lineares trabalhando entre os extremos de posição, ou seja, totalmente recolhido ou totalmente estendido, que apresentam boa repetibilidade. Estas tarefas em geral são simples, consistindo de movimentação de material, fixação de peças e separação de objetos, chamadas genericamente de operações pega-e-poe.

16 Acionadores Pneumáticos O baixo custo dos acionadores pneumáticos e da geração de arcomprimido faz com que a automação pneumática seja a mais adequada se o trabalho a ser realizado for simples. Pode-se utilizar o acionamento pneumático em juntas rotativas de forma direta (acionadores rotativos) ou com redutores (motores pneumáticos de lóbulos ou palhetas). Tais aplicações são, contudo, muito especificas e indicadas apenas quando houver restrições quanto ao acionamento elétrico ou hidráulico. A programação de sistemas pneumáticos pode ser realizada com controladores lógicos programáveis (PLC), ou mesmo por chaves distribuidoras e chaves fim-de-curso. Este tipo de programação permite certa flexibilidade na seqüência de acionamentos, porem é bastante limitada no que se refere a mudanças na forma e no tipo de tarefa executada. Pode-se dizer, portanto, que sistemas pneumáticos estão mais próximos de uma automação fixa do que da automação programável.
, ou mesmo por chaves distribuidoras e chaves fim-de-curso.")
17 Comparação dos Tipos de Atuadores

18 Comparação dos Tipos de Atuadores

19 Métodos de Acionamento Os acionadores elétricos tendem a ser maiores e mais pesados que acionadores hidráulicos e pneumáticos. Por este motivo, nem sempre é possível posicionar tais atuadores próximos as respectivas juntas, em virtude de restrições no espaço disponível ou de problemas com deflexões devido ao peso. Assim sendo, os acionadores podem ser acoplados de forma direta ou indireta.

20 Métodos de Acionamento Acionamento indireto Uma vez que os atuadores das juntas são pesados, os fabricantes tentam introduzir alterações no projeto que permitam redução do peso nas juntas próximas ao pulso e transferir este peso, quando possível, para a base. Desta forma consegue-se uma capacidade de carga maior para o braço. Este tipo de acionamento é denominado indireto, já que o atuador fica afastado da junta movida por ele. Neste tipo de acionamento, é necessário usar algum tipo de transmissão de potência, como polias, correntes, rodas dentadas, engrenagens, parafusos e correias, ou seja, o acionador é adaptado longe da junta pretendida do manipulador. Entretanto este método sofre efeitos indesejados no desempenho do robô, devido a folga nas engrenagens, flexão dos vínculos do manipulador, escorregamento dos sistemas de polias.

21 Métodos de Acionamento Acionamento direto Neste método, o acionador é adaptado diretamente na junta, o que, em determinados casos, proporciona melhor precisão e rendimento de potência em relação ao acionamento indireto. Contudo, devido ao baixo torque por unidade de peso alcançado pelos motores elétricos, costuma-se utilizá-los em conjunto com redutores de engrenagens, que aumentam o torque, porem reduzem a velocidade. Neste caso, se o acionador estiver fixado no elo motor, o acionamento é considerado direto. Nas juntas rotativas com acionamento direto, o sensor de posição angular ( encoder ) fornece o angulo relativo entre o elo motor e o elo movido. No acionamento indireto esta leitura fornece o angulo do elo movido em relação a um outro elo, anterior ao elo motor.
22 Órgão Terminal Na robótica, órgão terminal é usado para descrever a mão ou ferramenta que esta conectada ao pulso, como por exemplo, uma pistola de solda, garras, pulverizadores de tintas, entre outros. O órgão terminal é o responsável por realizar a manipulação de objetos em diferentes tamanhos, formas e materiais, porem esta manipulação depende da aplicação ao qual se destina. É valido ressaltar que os órgãos terminais requerem cuidados ao serem projetados, pois é necessário controlar a força que esta sendo aplicada num objeto. Para isso, alguns órgãos terminais são dotados de sensores que fornecem informações sobre os objetos. Existe uma grande variedade de modelos de garras que podem ser utilizadas em diversas aplicações.
23 Tipos de Garras Garras de dois dedos: É o tipo mais comum; Tem grande variedade de forma - diferenciados pelo tamanho e/ou movimento dos dedos; Dedos com movimento paralelo ou de rotação; Desvantagem - limitação da abertura dos dedos, não serve para grandes objetos.
24 Tipos de Garras Garras com dedos articulados: Projetadas para agarrar objetos de diferentes tamanhos e formas. Os dedos são articulados e formado por diversos vínculos; Sua destreza em segurar objetos de formas irregulares e tamanhos diferentes se deve ao grande número de vínculo; Podem ter dois ou mais dedos; Os vínculos são movimentados por pares de cabos, onde um cabo flexiona a articulação e o outro a estende.
25 Tipos de Garras Garra para objetos cilíndricos: Consiste de dois dedos com vários semicírculos chanfrados; Permite segurar objetos cilíndricos de vários diâmetros diferentes.
26 Tipos de Garras Garra para objetos frágeis: Exercem força controlada durante a operação de segurar algum objeto; Não causam dano ao objeto; Formada por dedos flexíveis - dedos se curvam de forma a agarrar um objeto frágil; Operação em geral pneumática ou elétrica; Podem ter controle ativo da pressão de contato com o objeto - mas para isso exige sensor de pressão.
27 Tipos de Garras Garras a vácuo: Garras a vácuo são projetados para prender uma superfície lisa pela ação do vácuo; Possuem ventosas de sucção conectadas a uma bomba de ar comprimido; Sevem para superfícies tipo chapas metálicas e caixas de papelão; Para reduzir o risco de mal funcionamento devido a perda de vácuo é comum usar mais do que uma ventosa de sucção.
28 Tipos de Garras Garras eletromagnéticas: São utilizadas para segurar objetos que podem ser magnetizados (aço e níquel) através de um campo magnético; São muito eficientes: Podem segurar objetos de vários tamanhos; Não necessitam de grande precisão no posicionamento da garra.
29 Exemplos de garras
Curso Automação Industrial Aula 3 Robôs e Seus Periféricos. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos
Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos
Sensores e Atuadores (2)
") (2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
(2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Robótica Industrial. Projeto de Manipuladores
 Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1 Robótica e Mecatrônica 2 Princípios
Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1 Robótica e Mecatrônica 2 Princípios
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
INTRODUÇÃO À ROBÓTICA
 Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Fundamentos de Automação. Atuadores e Elementos Finais de Controle
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Diretrizes para determinação de intervalos de comprovação para equipamentos de medição.
 Diretrizes para determinação de intervalos de comprovação para equipamentos de medição. De acordo com a Norma NBR 1001, um grande número de fatores influência a freqüência de calibração. Os mais importantes,
Diretrizes para determinação de intervalos de comprovação para equipamentos de medição. De acordo com a Norma NBR 1001, um grande número de fatores influência a freqüência de calibração. Os mais importantes,
Medição tridimensional
 A U A UL LA Medição tridimensional Um problema O controle de qualidade dimensional é tão antigo quanto a própria indústria, mas somente nas últimas décadas vem ocupando a importante posição que lhe cabe.
A U A UL LA Medição tridimensional Um problema O controle de qualidade dimensional é tão antigo quanto a própria indústria, mas somente nas últimas décadas vem ocupando a importante posição que lhe cabe.
TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES
 TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES 1) MOTORES Motores de passo e servo-motores (com ou sem escovas) têm cada um suas respectivas vantagens e desvantagens. Em geral não existe
TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES 1) MOTORES Motores de passo e servo-motores (com ou sem escovas) têm cada um suas respectivas vantagens e desvantagens. Em geral não existe
1 ATUADORES HIDRÁULICOS
 1 ATUADORES HIDRÁULICOS Danniela Rosa Sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Aliás, o motor elétrico também é um tipo de atuador.
1 ATUADORES HIDRÁULICOS Danniela Rosa Sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Aliás, o motor elétrico também é um tipo de atuador.
Considerações sobre redimensionamento de motores elétricos de indução
 Considerações sobre redimensionamento de motores elétricos de indução Artigo publicado na revista Lumiere Electric edição nº 166 Aplicações de investimentos dentro das empresas sempre são questionadas
Considerações sobre redimensionamento de motores elétricos de indução Artigo publicado na revista Lumiere Electric edição nº 166 Aplicações de investimentos dentro das empresas sempre são questionadas
PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS
 INFORMATIVO TÉCNICO N 019/09 INFORMATIVO TÉCNICO PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS 1/21 INFORMATIVO TÉCNICO N 019/09 O PRINCIPAL COMPONENTE DE
INFORMATIVO TÉCNICO N 019/09 INFORMATIVO TÉCNICO PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS 1/21 INFORMATIVO TÉCNICO N 019/09 O PRINCIPAL COMPONENTE DE
Automatismos Industriais
 Automatismos Industriais Introdução à Pneumática Nos actuais sistemas de automação a pneumática é um elemento muito importante pois está presente num vasto numero de aplicações, seja como sistema totalmente
Automatismos Industriais Introdução à Pneumática Nos actuais sistemas de automação a pneumática é um elemento muito importante pois está presente num vasto numero de aplicações, seja como sistema totalmente
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial Jhonathan Junio de Souza Motores de Passo Trabalho apresentado à disciplina
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial Jhonathan Junio de Souza Motores de Passo Trabalho apresentado à disciplina
Introdução ao Controlo Numérico Computorizado I Conceitos Gerais
 Introdução ao Controlo Numérico Computorizado I Conceitos Gerais João Manuel R. S. Tavares Joaquim Oliveira Fonseca Bibliografia Controlo Numérico Computorizado, Conceitos Fundamentais Carlos Relvas Publindústria,
Introdução ao Controlo Numérico Computorizado I Conceitos Gerais João Manuel R. S. Tavares Joaquim Oliveira Fonseca Bibliografia Controlo Numérico Computorizado, Conceitos Fundamentais Carlos Relvas Publindústria,
Hidráulica móbil aplicada a máquina agrícolas 1. 1. Bombas e Motores
 Hidráulica móbil aplicada a máquina agrícolas 1 BOMBAS: 1. Bombas e Motores As bombas hidráulicas são o coração do sistema, sua principal função é converter energia mecânica em hidráulica. São alimentadas
Hidráulica móbil aplicada a máquina agrícolas 1 BOMBAS: 1. Bombas e Motores As bombas hidráulicas são o coração do sistema, sua principal função é converter energia mecânica em hidráulica. São alimentadas
Sensores - Encoder. Encoder linear Mesmo princípio de funcionamento dos encoders rotativos; Podem ser incremental ou absoluto.
 Sensores - Encoder Encoder linear Mesmo princípio de funcionamento dos encoders rotativos; Podem ser incremental ou absoluto. Sensores - Resolvers Usado para medição de posição angular. Princípio de funcionamento
Sensores - Encoder Encoder linear Mesmo princípio de funcionamento dos encoders rotativos; Podem ser incremental ou absoluto. Sensores - Resolvers Usado para medição de posição angular. Princípio de funcionamento
Manual de Usuário. (Y-200, Y-300, Y-400, Y-500, Y-550, Y- 600, Y-700, Y-850, Y-1200, Y-1500 e Y- 2000)
") AUTOMATIZADORES PARA PORTAS DE ENROLAR IMPORTAÇÃO E SUPORTE TÉCNICO NA INSTALAÇÃO Manual de Usuário (Y-200, Y-300, Y-400, Y-500, Y-550, Y- 600, Y-700, Y-850, Y-1200, Y-1500 e Y- 2000) SAC: 55 + 11 3088
AUTOMATIZADORES PARA PORTAS DE ENROLAR IMPORTAÇÃO E SUPORTE TÉCNICO NA INSTALAÇÃO Manual de Usuário (Y-200, Y-300, Y-400, Y-500, Y-550, Y- 600, Y-700, Y-850, Y-1200, Y-1500 e Y- 2000) SAC: 55 + 11 3088
Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.
![Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.](/thumbs/26/7510700.jpg "Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.") Servomotores Este pequeno tutorial tem como finalidade auxiliar no entendimento de um dos componentes básico utilizados na construção de robôs móveis. www.sumoderobos.org Compilado por André Santos Agosto
Servomotores Este pequeno tutorial tem como finalidade auxiliar no entendimento de um dos componentes básico utilizados na construção de robôs móveis. www.sumoderobos.org Compilado por André Santos Agosto
Aula -2 Motores de Corrente Contínua com Escovas
 Aula -2 Motores de Corrente Contínua com Escovas Introdução Será descrito neste tópico um tipo específico de motor que será denominado de motor de corrente contínua com escovas. Estes motores possuem dois
Aula -2 Motores de Corrente Contínua com Escovas Introdução Será descrito neste tópico um tipo específico de motor que será denominado de motor de corrente contínua com escovas. Estes motores possuem dois
UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO Objetivos da Aula Diferenciar automação da mecanização. Posicionar a automação industrial no contexto histórico. Classificar os tipos
UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO Objetivos da Aula Diferenciar automação da mecanização. Posicionar a automação industrial no contexto histórico. Classificar os tipos
Controle II. Estudo e sintonia de controladores industriais
 Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Espaço de Trabalho. θ 2
 1. ROBÓTICA: CONCEITOS BÁSICOS 1.1 Robôs Manipuladores: Robô: Máquina universal programável que tem existência no mundo físico e atua nele através de movimentos mecânicos. Espaço de Trabalho: Região do
1. ROBÓTICA: CONCEITOS BÁSICOS 1.1 Robôs Manipuladores: Robô: Máquina universal programável que tem existência no mundo físico e atua nele através de movimentos mecânicos. Espaço de Trabalho: Região do
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSMISSAO E TELEMETRIA
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSMISSAO E TELEMETRIA Introdução Frequentemente, o instrumento indicador, controlador, registrador, etc. e instalado a uma distancia considerável do ponto de medição.
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSMISSAO E TELEMETRIA Introdução Frequentemente, o instrumento indicador, controlador, registrador, etc. e instalado a uma distancia considerável do ponto de medição.
Motores em miniatura proporcionam um grande desempenho para analisadores médicos
 thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
Caminhões basculantes. Design PGRT
 Informações gerais sobre caminhões basculantes Informações gerais sobre caminhões basculantes Os caminhões basculantes são considerados como uma carroceria sujeita à torção. Os caminhões basculantes são
Informações gerais sobre caminhões basculantes Informações gerais sobre caminhões basculantes Os caminhões basculantes são considerados como uma carroceria sujeita à torção. Os caminhões basculantes são
Transmissões de Potência
 Transmissões de Potência PMR 2201 Transmissões O emprego de transmissões torna-se necessário para compatibilizar a velocidade angular ou conjugado da máquina motriz com a necessidade da máquina acionada,
Transmissões de Potência PMR 2201 Transmissões O emprego de transmissões torna-se necessário para compatibilizar a velocidade angular ou conjugado da máquina motriz com a necessidade da máquina acionada,
V.7. Noções Básicas sobre o uso da Potência e do Torque do Motor.
 V.7. Noções Básicas sobre o uso da Potência e do Torque do Motor. V.7.1. Torque Quando você faz força para desrosquear uma tampa de um vidro de conservas com a mão, se está aplicando torque. O torque é
V.7. Noções Básicas sobre o uso da Potência e do Torque do Motor. V.7.1. Torque Quando você faz força para desrosquear uma tampa de um vidro de conservas com a mão, se está aplicando torque. O torque é
AULAS 03-04 UNIDADE 1 DINÂMICA DE MÁQUINAS ELÉTRICAS (DME) Prof. Ademir Nied [email protected]
 Prof. Ademir Nied ademir.nied@udesc.br") Universidade do Estado de Santa Catarina Departamento de Engenharia Elétrica Curso de Pós-Graduação em Engenharia Elétrica AULAS 03-04 UNIDADE 1 DINÂMICA DE MÁQUINAS ELÉTRICAS (DME) Prof. Ademir Nied [email protected]
Universidade do Estado de Santa Catarina Departamento de Engenharia Elétrica Curso de Pós-Graduação em Engenharia Elétrica AULAS 03-04 UNIDADE 1 DINÂMICA DE MÁQUINAS ELÉTRICAS (DME) Prof. Ademir Nied [email protected]
Vazão. 7.1 Introdução
 Cap. 7 Medição de 7.1 Introdução Vazão Existem diversos tipos de medidores de vazão de escoamento, sendo que a escolha de um tipo dependerá das condições necessárias ao sistema, como por exemplo, a faixa
Cap. 7 Medição de 7.1 Introdução Vazão Existem diversos tipos de medidores de vazão de escoamento, sendo que a escolha de um tipo dependerá das condições necessárias ao sistema, como por exemplo, a faixa
UNICAMP Faculdade de Engenharia Elétrica
 UNICAMP Faculdade de Engenharia Elétrica e de Computação EA-617 Introdução à Simulação Analógica Experiência 4: Equipamentos ECP 1 Sumário 1 Introdução 1 2 Descrição dos Sistemas 2 2.1 Emulador Industrial...............................
UNICAMP Faculdade de Engenharia Elétrica e de Computação EA-617 Introdução à Simulação Analógica Experiência 4: Equipamentos ECP 1 Sumário 1 Introdução 1 2 Descrição dos Sistemas 2 2.1 Emulador Industrial...............................
DESENVOLVIMENTO DE UM SISTEMA AUTOMATIZADO PARA INSPEÇÃO ULTRA-SÔNICA EM CASCO DE NAVIO
 DESENVOLVIMENTO DE UM SISTEMA AUTOMATIZADO PARA INSPEÇÃO ULTRA-SÔNICA EM CASCO DE NAVIO Antonio A. de Carvalho, Raphael C. S. B. Suita, Ivan C. da Silva, João M. A. Rebello Universidade Federal do Rio
DESENVOLVIMENTO DE UM SISTEMA AUTOMATIZADO PARA INSPEÇÃO ULTRA-SÔNICA EM CASCO DE NAVIO Antonio A. de Carvalho, Raphael C. S. B. Suita, Ivan C. da Silva, João M. A. Rebello Universidade Federal do Rio
Fundamentos de Automação. Hidráulica 01/06/2015. Hidráulica. Hidráulica. Hidráulica. Considerações Iniciais CURSO DE AUTOMAÇÃO INDUSTRIAL
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação CURSO
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação CURSO
1 - AUTOMATIZADOR: Utilizado exclusivamente em portas de enrolar de aço. Existem diversas capacidades e tamanhos. Verifique sempre o peso e o tamanho
 1 ME-01 REV00 13 3 1 2 14 9 10 12 4 5 6 7 11 8 1 - AUTOMATIZADOR: Utilizado exclusivamente em portas de enrolar de aço. Existem diversas capacidades e tamanhos. Verifique sempre o peso e o tamanho da porta
1 ME-01 REV00 13 3 1 2 14 9 10 12 4 5 6 7 11 8 1 - AUTOMATIZADOR: Utilizado exclusivamente em portas de enrolar de aço. Existem diversas capacidades e tamanhos. Verifique sempre o peso e o tamanho da porta
AS CARACTERÍSTICAS PRINCIPAIS DO MOTOR INCLUEM...
 Motores H-Compact COMPACTO, REFRIGERAÇÃO EFICIENTE A importância crescente da economia de energia, dos requerimentos ambientais, da procura por dimensões menores e das imposições dos mercados nacionais
Motores H-Compact COMPACTO, REFRIGERAÇÃO EFICIENTE A importância crescente da economia de energia, dos requerimentos ambientais, da procura por dimensões menores e das imposições dos mercados nacionais
Eletrônica Analógica
 UNIVERSIDADE FEDERAL DO PARÁ FACULDADE DE ENGENHARIA DE COMPUTAÇÃO E TELECOMUNICAÇÕES Eletrônica Analógica Transistores de Efeito de Campo Professor Dr. Lamartine Vilar de Souza [email protected] www.lvsouza.ufpa.br
UNIVERSIDADE FEDERAL DO PARÁ FACULDADE DE ENGENHARIA DE COMPUTAÇÃO E TELECOMUNICAÇÕES Eletrônica Analógica Transistores de Efeito de Campo Professor Dr. Lamartine Vilar de Souza [email protected] www.lvsouza.ufpa.br
Controlo de iluminação local multifuncional
 Controlo de iluminação local multifuncional I Controlo de iluminação local multifuncional A nível mundial, sensivelmente 20 % do consumo total de energia diz respeito à iluminação. Dependendo do tipo de
Controlo de iluminação local multifuncional I Controlo de iluminação local multifuncional A nível mundial, sensivelmente 20 % do consumo total de energia diz respeito à iluminação. Dependendo do tipo de
FUNCIONAMENTO DO SISTEMA DE TRANSMISSÃO:
 FUNCIONAMENTO DO SISTEMA DE TRANSMISSÃO: 1 - EMBREAGEM 2 - CÂMBIO 3 - DIFERENCIAL 4 - REDUÇÃO FINAL Luiz Atilio Padovan Prof. Eng. Agrônomo 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO
FUNCIONAMENTO DO SISTEMA DE TRANSMISSÃO: 1 - EMBREAGEM 2 - CÂMBIO 3 - DIFERENCIAL 4 - REDUÇÃO FINAL Luiz Atilio Padovan Prof. Eng. Agrônomo 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO 1 EMBREAGEM LOCALIZAÇÃO
AUTOMAÇÃO DE CÚPULA DE OBSERVATÓRIO ASTRONÔMICO
 AUTOMAÇÃO DE CÚPULA DE OBSERVATÓRIO ASTRONÔMICO Marcella Scoczynski Ribeiro (UTFPR/UEPG) [email protected] Matheus Safraid (UEPG) [email protected] Resumo Este trabalho apresenta os benefícios
AUTOMAÇÃO DE CÚPULA DE OBSERVATÓRIO ASTRONÔMICO Marcella Scoczynski Ribeiro (UTFPR/UEPG) [email protected] Matheus Safraid (UEPG) [email protected] Resumo Este trabalho apresenta os benefícios
3. Procedimento para Avaliação da Integridade Estrutural em estruturas de equipamentos de transporte e elevação de materiais
 3. Procedimento para Avaliação da Integridade Estrutural em estruturas de equipamentos de transporte e elevação de materiais Neste capítulo serão descritos os passos para a avaliação da Integridade Estrutural
3. Procedimento para Avaliação da Integridade Estrutural em estruturas de equipamentos de transporte e elevação de materiais Neste capítulo serão descritos os passos para a avaliação da Integridade Estrutural
Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles!
 Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles! É importante lembrar que esta matéria serve para qualquer tipo de servo utilizado em aeromodelismo. Figura 1 Um dos diversos
Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles! É importante lembrar que esta matéria serve para qualquer tipo de servo utilizado em aeromodelismo. Figura 1 Um dos diversos
Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA.
 Motores elétricos Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA. Para melhor entender o funcionamento desse
Motores elétricos Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA. Para melhor entender o funcionamento desse
6 Conclusões e sugestões para trabalhos futuros
 6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica
 UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
Introdução. Aplicações
 Motor de Passo Introdução Os motores de passo preenchem um nicho único no mundo dos motores controlados. Estes motores são usualmente empregados em aplicações de medição e de controle. Aplicações Aplicações
Motor de Passo Introdução Os motores de passo preenchem um nicho único no mundo dos motores controlados. Estes motores são usualmente empregados em aplicações de medição e de controle. Aplicações Aplicações
Infra estrutura precária Máquinas e Equipamentos
 Variável: Infra estrutura precária Máquinas e Equipamentos Participantes do Aprofundamento da Variável: Coordenador: Mário Vinícius Bueno Cerâmica Betel - Uruaçu-Go Colaboradores: Juarez Rodrigues dos
Variável: Infra estrutura precária Máquinas e Equipamentos Participantes do Aprofundamento da Variável: Coordenador: Mário Vinícius Bueno Cerâmica Betel - Uruaçu-Go Colaboradores: Juarez Rodrigues dos
Curso de Especialização em Engenharia Automotiva. Módulo: Transmissões
 Curso de Especialização em Engenharia Automotiva Módulo: Realização: Parceria: CVT (Continuous Variable Transmission) Com a tecnologia CVT o torque do motor é transmitido a uma polia motriz ligada a uma
Curso de Especialização em Engenharia Automotiva Módulo: Realização: Parceria: CVT (Continuous Variable Transmission) Com a tecnologia CVT o torque do motor é transmitido a uma polia motriz ligada a uma
1 Introdução simulação numérica termoacumulação
 22 1 Introdução Atualmente o custo da energia é um dos fatores mais importantes no projeto, administração e manutenção de sistemas energéticos. Sendo assim, a economia de energia está recebendo maior atenção
22 1 Introdução Atualmente o custo da energia é um dos fatores mais importantes no projeto, administração e manutenção de sistemas energéticos. Sendo assim, a economia de energia está recebendo maior atenção
CRONÔMETRO MICROPROCESSADO
 O equipamento possui um display de alta resolução e 6 botões: CRONÔMETRO MICROPROCESSADO www.maxwellbohr.com.br (43) 3028-9255 LONDRINA PR 1 - Introdução O Cronômetro Microprocessado é um sistema destinado
O equipamento possui um display de alta resolução e 6 botões: CRONÔMETRO MICROPROCESSADO www.maxwellbohr.com.br (43) 3028-9255 LONDRINA PR 1 - Introdução O Cronômetro Microprocessado é um sistema destinado
Top Guia In.Fra: Perguntas para fazer ao seu fornecedor de CFTV
 Top Guia In.Fra: Perguntas para fazer ao seu fornecedor de CFTV 1ª Edição (v1.4) 1 Um projeto de segurança bem feito Até pouco tempo atrás o mercado de CFTV era dividido entre fabricantes de alto custo
Top Guia In.Fra: Perguntas para fazer ao seu fornecedor de CFTV 1ª Edição (v1.4) 1 Um projeto de segurança bem feito Até pouco tempo atrás o mercado de CFTV era dividido entre fabricantes de alto custo
Adaptação de. PdP. Autor: Luís Fernando Patsko Nível: Intermediário Criação: 13/01/2006 Última versão: 18/12/2006
 TUTORIAL Adaptação de Servo-motores Autor: Luís Fernando Patsko Nível: Intermediário Criação: 13/01/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Adaptação de Servo-motores Autor: Luís Fernando Patsko Nível: Intermediário Criação: 13/01/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
AULA 6 Esquemas Elétricos Básicos das Subestações Elétricas
 CONSIDERAÇÕES INICIAIS AULA 6 Esquemas Elétricos Básicos das Subestações Elétricas Quando planejamos construir uma subestação, o aspecto de maior importância está na escolha (e, conseqüentemente, da definição)
CONSIDERAÇÕES INICIAIS AULA 6 Esquemas Elétricos Básicos das Subestações Elétricas Quando planejamos construir uma subestação, o aspecto de maior importância está na escolha (e, conseqüentemente, da definição)
Calculando RPM. O s conjuntos formados por polias e correias
 A U L A Calculando RPM O problema O s conjuntos formados por polias e correias e os formados por engrenagens são responsáveis pela transmissão da velocidade do motor para a máquina. Geralmente, os motores
A U L A Calculando RPM O problema O s conjuntos formados por polias e correias e os formados por engrenagens são responsáveis pela transmissão da velocidade do motor para a máquina. Geralmente, os motores
Como funciona o motor de corrente contínua
 Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Estudo e Modelagem Computacional de um Robô Aplicado em Processos de Usinagem
 Universidade Federal de São João Del-Rei MG 26 a 28 de maio de 2010 Associação Brasileira de Métodos Computacionais em Engenharia Estudo e Modelagem Computacional de um Robô Aplicado em Processos de Usinagem
Universidade Federal de São João Del-Rei MG 26 a 28 de maio de 2010 Associação Brasileira de Métodos Computacionais em Engenharia Estudo e Modelagem Computacional de um Robô Aplicado em Processos de Usinagem
Correntes. Os problemas de uma empresa da área de. Conceito
 A U A UL LA Correntes Introdução Os problemas de uma empresa da área de transporte e cargas fez com que o encarregado do setor tomasse algumas decisões referentes à substituição de equipamentos, como componentes
A U A UL LA Correntes Introdução Os problemas de uma empresa da área de transporte e cargas fez com que o encarregado do setor tomasse algumas decisões referentes à substituição de equipamentos, como componentes
Inversores de Frequência Aplicados em Processos de Mineração Trazem Ganho de Produtividade, Economia de Energia e Manutenção Reduzida.
 Inversores de Frequência Aplicados em Processos de Mineração Trazem Ganho de Produtividade, Economia de Energia e Manutenção Reduzida. Eng. Cristian Benedet Tezza - [email protected] WEG AUTOMAÇÃO Av. Prefeito
Inversores de Frequência Aplicados em Processos de Mineração Trazem Ganho de Produtividade, Economia de Energia e Manutenção Reduzida. Eng. Cristian Benedet Tezza - [email protected] WEG AUTOMAÇÃO Av. Prefeito
7ª Aula Válvulas Direcionais
 7ª Aula Válvulas Direcionais Os comandos pneumáticos consistem de seis camadas de elementos que são: a. Elementos de trabalho; b. Elementos de influência; c. Elementos de comando; d. Elementos de processamento
7ª Aula Válvulas Direcionais Os comandos pneumáticos consistem de seis camadas de elementos que são: a. Elementos de trabalho; b. Elementos de influência; c. Elementos de comando; d. Elementos de processamento
Válvulas controladoras de vazão
 Generalidades Válvula controladora de vazão variável Válvula de controle de vazão variável com retenção integrada Métodos de controle de vazão Válvula de controle de vazão com pressão compensada temperatura
Generalidades Válvula controladora de vazão variável Válvula de controle de vazão variável com retenção integrada Métodos de controle de vazão Válvula de controle de vazão com pressão compensada temperatura
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA Introdução O uso de termômetros de resistência esta se difundindo rapidamente devido a sua precisão e simplicidade
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS MEDIÇÃO DE TEMPERATURA TERMÔMETROS DE RESISTÊNCIA Introdução O uso de termômetros de resistência esta se difundindo rapidamente devido a sua precisão e simplicidade
Miguel C. Branchtein, Delegacia Regional do Trabalho no Rio Grande do Sul
 DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
MÁQUINAS AGRÍCOLAS PROF. ELISEU FIGUEIREDO NETO
 MÁQUINAS AGRÍCOLAS PROF. ELISEU FIGUEIREDO NETO COLHEITA NA AUSTRALIA Hoje nós temos que preocupar não só em aprimorar as MÁQUINAS, mas também os OPERADORES que com elas trabalham. PARTES CONSTITUINTES
MÁQUINAS AGRÍCOLAS PROF. ELISEU FIGUEIREDO NETO COLHEITA NA AUSTRALIA Hoje nós temos que preocupar não só em aprimorar as MÁQUINAS, mas também os OPERADORES que com elas trabalham. PARTES CONSTITUINTES
lubrificantes e combustíveis
 lubrificantes e combustíveis Lubrificantes A lubrificação é um dos principais itens de manutenção de máquinas agrícolas e deve ser entendida e praticada para aumento da vida útil das mesmas,devido se tornarem
lubrificantes e combustíveis Lubrificantes A lubrificação é um dos principais itens de manutenção de máquinas agrícolas e deve ser entendida e praticada para aumento da vida útil das mesmas,devido se tornarem
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Fundação Centro Tecnológico de Minas Gerais IMPLANTAÇÃO DO LABORATÓRIO DE VAZÃO DE GÁS DA FUNDAÇÃO CENTRO TECNOLÓGICO DE MINAS GERAIS
 Fundação Centro Tecnológico de Minas Gerais IMPLANTAÇÃO DO LABORATÓRIO DE VAZÃO DE GÁS DA FUNDAÇÃO CENTRO TECNOLÓGICO DE MINAS GERAIS V Seminário de Metrologia Aeroespacial V SEMETRA 21 a 24 de julho de
Fundação Centro Tecnológico de Minas Gerais IMPLANTAÇÃO DO LABORATÓRIO DE VAZÃO DE GÁS DA FUNDAÇÃO CENTRO TECNOLÓGICO DE MINAS GERAIS V Seminário de Metrologia Aeroespacial V SEMETRA 21 a 24 de julho de
CORRENTES. A transmissão por corrente de rolo é um meio altamente eficiente e versátil para transmitir potência mecânica em aplicações industriais.
 CORRENTES Definição A transmissão por corrente de rolo é um meio altamente eficiente e versátil para transmitir potência mecânica em aplicações industriais. A corrente de rolo é tão flexível como as correias
CORRENTES Definição A transmissão por corrente de rolo é um meio altamente eficiente e versátil para transmitir potência mecânica em aplicações industriais. A corrente de rolo é tão flexível como as correias
Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um
 e transmitem um sinal para um") Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de medição ou controle. 1 Cite 05 tipos
Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de medição ou controle. 1 Cite 05 tipos
Acoplamento. Uma pessoa, ao girar o volante de seu automóvel, Conceito. Classificação
 A U A UL LA Acoplamento Introdução Uma pessoa, ao girar o volante de seu automóvel, percebeu um estranho ruído na roda. Preocupada, procurou um mecânico. Ao analisar o problema, o mecânico concluiu que
A U A UL LA Acoplamento Introdução Uma pessoa, ao girar o volante de seu automóvel, percebeu um estranho ruído na roda. Preocupada, procurou um mecânico. Ao analisar o problema, o mecânico concluiu que
Figura 6.1 - Ar sangrado do compressor da APU
 1 Capítulo 6 - SANGRIA DE AR 6.1 - Finalidade e características gerais A finalidade da APU é fornecer ar comprimido para os sistemas pneumáticos da aeronave e potência de eixo para acionar o gerador de
1 Capítulo 6 - SANGRIA DE AR 6.1 - Finalidade e características gerais A finalidade da APU é fornecer ar comprimido para os sistemas pneumáticos da aeronave e potência de eixo para acionar o gerador de
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA)
") ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
LASERTECK LTA450 MANUAL DE USO
 LASERTECK LTA450 MANUAL DE USO 2014 SUMÁRIO 1 INTRODUÇÃO... 3 2 INFORMAÇÕES TÉCNICAS... 3 3 CALIBRAGEM DOS MÓDULOS LASER (AFERIÇÃO E TEMPORIZAÇÃO)... 3 3.1 AFERIÇÃO DO LASER PONTO LONGITUDINAL...3 3.2
LASERTECK LTA450 MANUAL DE USO 2014 SUMÁRIO 1 INTRODUÇÃO... 3 2 INFORMAÇÕES TÉCNICAS... 3 3 CALIBRAGEM DOS MÓDULOS LASER (AFERIÇÃO E TEMPORIZAÇÃO)... 3 3.1 AFERIÇÃO DO LASER PONTO LONGITUDINAL...3 3.2
Permite a coleta de dados em tempo real dos processos de produção, possuindo, também, interfaces para a transferência dos dados para os sistemas
 Permite a coleta de dados em tempo real dos processos de produção, possuindo, também, interfaces para a transferência dos dados para os sistemas administrativos da empresa. Nessa configuração, o PC é a
Permite a coleta de dados em tempo real dos processos de produção, possuindo, também, interfaces para a transferência dos dados para os sistemas administrativos da empresa. Nessa configuração, o PC é a
Ponte rolante: como escolher
 Ponte rolante: como escolher Vários fatores devem ser analisados antes de se optar por um modelo A decisão sobre a escolha do tipo de ponte rolante é altamente influenciada pelo local onde ela deve ser
Ponte rolante: como escolher Vários fatores devem ser analisados antes de se optar por um modelo A decisão sobre a escolha do tipo de ponte rolante é altamente influenciada pelo local onde ela deve ser
VÁLVULAS. Válvulas de Regulagem São destinadas especificamente para controlar o fluxo, podendo por isso trabalhar em qualquer posição de fechamento.
 VÁLVULAS São dispositivos destinados a estabelecer, controlar e interromper o fluxo em uma tubulação. São acessórios muito importantes nos sistemas de condução, e por isso devem merecer o maior cuidado
VÁLVULAS São dispositivos destinados a estabelecer, controlar e interromper o fluxo em uma tubulação. São acessórios muito importantes nos sistemas de condução, e por isso devem merecer o maior cuidado
COMANDOS ELÉTRICOS Este material não é destinado a comercialização.
 COMANDOS ELÉTRICOS Está apostila é usada nas aulas ministradas na matéria de comandos no curso de pósmédio mecatrônica, não se tratando de um material voltado para a qualificação. Há ainda um complemento
COMANDOS ELÉTRICOS Está apostila é usada nas aulas ministradas na matéria de comandos no curso de pósmédio mecatrônica, não se tratando de um material voltado para a qualificação. Há ainda um complemento
COMPRESSORES. Ruy Alexandre Generoso
 COMPRESSORES Ruy Alexandre Generoso É o componente básico de qualquer sistema pneumático. O ar é comprimido em um sistema pneumático, de forma que possa ser usado para puxar, empurrar, realizar trabalho
COMPRESSORES Ruy Alexandre Generoso É o componente básico de qualquer sistema pneumático. O ar é comprimido em um sistema pneumático, de forma que possa ser usado para puxar, empurrar, realizar trabalho
Acumuladores hidráulicos
 Tipos de acumuladores Compressão isotérmica e adiabática Aplicações de acumuladores no circuito Volume útil Pré-carga em acumuladores Instalação Segurança Manutenção Acumuladores Hidráulicos de sistemas
Tipos de acumuladores Compressão isotérmica e adiabática Aplicações de acumuladores no circuito Volume útil Pré-carga em acumuladores Instalação Segurança Manutenção Acumuladores Hidráulicos de sistemas
ARQUITETURA DE COMPUTADORES
 1 ARQUITETURA DE COMPUTADORES U C P Prof. Leandro Coelho Plano de Aula 2 Aula Passada Definição Evolução dos Computadores Histórico Modelo de Von-Neumann Básico CPU Mémoria E/S Barramentos Plano de Aula
1 ARQUITETURA DE COMPUTADORES U C P Prof. Leandro Coelho Plano de Aula 2 Aula Passada Definição Evolução dos Computadores Histórico Modelo de Von-Neumann Básico CPU Mémoria E/S Barramentos Plano de Aula
Robótica. Índice. Cap. 1 Introdução. Cap. 2 Automação da produção 2.1 - História da robótica 2.2 - Automação
 3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
3 Robótica Índice Cap. Introdução Cap. 2 Automação da produção 2. - História da robótica 2.2 - Automação Cap. 3 Fundamentos da Tecnologia de Robôs 3. - Nomenclatura 3.2 Anatomia dos braços mecânicos industriais
6 Circuitos pneumáticos e hidráulicos
 A U A UL LA Circuitos pneumáticos e hidráulicos Um problema A injetora de plásticos de uma fábrica quebrou. Desesperado, o supervisor de produção procura pelo novo mecânico de manutenção de plantão: você.
A U A UL LA Circuitos pneumáticos e hidráulicos Um problema A injetora de plásticos de uma fábrica quebrou. Desesperado, o supervisor de produção procura pelo novo mecânico de manutenção de plantão: você.
Métodos normalizados para medição de resistência de aterramento
 30 Capítulo VIII Métodos normalizados para medição de resistência de aterramento Parte 3: Método da queda de potencial com injeção de alta corrente e ensaios em instalações energizadas Jobson Modena e
30 Capítulo VIII Métodos normalizados para medição de resistência de aterramento Parte 3: Método da queda de potencial com injeção de alta corrente e ensaios em instalações energizadas Jobson Modena e
Funções de Posicionamento para Controle de Eixos
 Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
Lubrificação IV. Notou-se excessivo ruído no sistema de mudança. Sistema selado
 A U A UL LA Lubrificação IV Introdução Notou-se excessivo ruído no sistema de mudança da caixa de câmbio de um automóvel. Um mecânico verificou que a caixa de câmbio estava com problemas por falta de óleo.
A U A UL LA Lubrificação IV Introdução Notou-se excessivo ruído no sistema de mudança da caixa de câmbio de um automóvel. Um mecânico verificou que a caixa de câmbio estava com problemas por falta de óleo.
INSTALAÇÃO, LUBRIFICAÇÃO E MANUTENÇÃO DAS CORRENTES TRANSPORTADORAS PROCEDIMENTO DE INSTALAÇÃO DA CORRENTE
 UNP-130408 1 de 6 INSTALAÇÃO, LUBRIFICAÇÃO E MANUTENÇÃO DAS CORRENTES TRANSPORTADORAS A vida útil das correntes transportadoras e elevadoras está diretamente ligada aos cuidados com a instalação, lubrificação
UNP-130408 1 de 6 INSTALAÇÃO, LUBRIFICAÇÃO E MANUTENÇÃO DAS CORRENTES TRANSPORTADORAS A vida útil das correntes transportadoras e elevadoras está diretamente ligada aos cuidados com a instalação, lubrificação
Bicos Pulverizadores. Análise da Pulverização. Fabricação da Pulverização. Controle da Pulverização. Sistema de Lubrificação Spraying Systems
 Bicos Pulverizadores Controle da Análise da Fabricação da Sistema de Lubrificação Spraying Systems Sistemas de Lubrificação Spray Os Sistemas de Lubrificação Spray fornecem um método altamente eficiente
Bicos Pulverizadores Controle da Análise da Fabricação da Sistema de Lubrificação Spraying Systems Sistemas de Lubrificação Spray Os Sistemas de Lubrificação Spray fornecem um método altamente eficiente
CONHECIMENTO ESPECÍFICO
 CONHECIMENTO ESPECÍFICO 6. O PID (Proporcional Integral Derivativo) é comumente usado na automação industrial para se encontrar um erro entre a entrada e a saída de um processo qualquer. Nesse processo,
CONHECIMENTO ESPECÍFICO 6. O PID (Proporcional Integral Derivativo) é comumente usado na automação industrial para se encontrar um erro entre a entrada e a saída de um processo qualquer. Nesse processo,
ELETROTÉCNICA ELM ROTEIRO DA AULA PRÁTICA 01 A LEI DE OHM e AS LEIS DE KIRCHHOFF
 ELETROTÉCNICA ELM ROTEIRO DA AULA PRÁTICA 01 A LEI DE OHM e AS LEIS DE KIRCHHOFF NOME: TURMA: DATA: / / OBJETIVOS: Ler o valor nominal de cada resistor através do código de cores. Conhecer os tipos de
ELETROTÉCNICA ELM ROTEIRO DA AULA PRÁTICA 01 A LEI DE OHM e AS LEIS DE KIRCHHOFF NOME: TURMA: DATA: / / OBJETIVOS: Ler o valor nominal de cada resistor através do código de cores. Conhecer os tipos de
MANUAL DE INSTRUÇÕES DEMARCADOR RODOVIÁRIO
 MANUAL DE INSTRUÇÕES DEMARCADOR RODOVIÁRIO MDMR-3P/III 1 Equipamento Fabricado por: SENSORES INDUSTRIAIS MAKSEN LTDA Rua José Alves, 388 Mogi Guaçu - SP CNPJ 04.871.530/0001-66 I.E. 455.095.131.110 www.maksen.com.br
MANUAL DE INSTRUÇÕES DEMARCADOR RODOVIÁRIO MDMR-3P/III 1 Equipamento Fabricado por: SENSORES INDUSTRIAIS MAKSEN LTDA Rua José Alves, 388 Mogi Guaçu - SP CNPJ 04.871.530/0001-66 I.E. 455.095.131.110 www.maksen.com.br
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO. Projeto Conceitual de um Robô SCARA
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO Projeto Conceitual de um Robô SCARA Disciplina de Projetos I (CCA 99002) Prof.Dr. Rafael Antônio Comparsi
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL ESCOLA DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO Projeto Conceitual de um Robô SCARA Disciplina de Projetos I (CCA 99002) Prof.Dr. Rafael Antônio Comparsi
ESCOLA DE ENGEHARIA DE SÃO CARLOS - USP KELEN CRISTIANE TEIXEIRA VIVALDINI MOTOR DE CORRENTE CONTÍNUA MATERIAL COMPLEMENTAR
 ESCOLA DE ENGEHARIA DE SÃO CARLOS - USP KELEN CRISTIANE TEIXEIRA VIVALDINI MOTOR DE CORRENTE CONTÍNUA MATERIAL COMPLEMENTAR SÃO CARLOS 2009 LISTA DE FIGURAS FIGURA 01: Motor de corrente contínua...4 FIGURA
ESCOLA DE ENGEHARIA DE SÃO CARLOS - USP KELEN CRISTIANE TEIXEIRA VIVALDINI MOTOR DE CORRENTE CONTÍNUA MATERIAL COMPLEMENTAR SÃO CARLOS 2009 LISTA DE FIGURAS FIGURA 01: Motor de corrente contínua...4 FIGURA
CONVERSOR DE TORQUE PRINCIPIO DE FUNCIONAMENTO
 CONVERSOR DE TORQUE PRINCIPIO DE FUNCIONAMENTO Em matérias anteriores, conhecemos algumas noções básicas do funcionamento de uma transmissão automática, com seus componentes principais, informando ao técnico
CONVERSOR DE TORQUE PRINCIPIO DE FUNCIONAMENTO Em matérias anteriores, conhecemos algumas noções básicas do funcionamento de uma transmissão automática, com seus componentes principais, informando ao técnico
As peças a serem usinadas podem ter as
 A U A UL LA Fresagem As peças a serem usinadas podem ter as mais variadas formas. Este poderia ser um fator de complicação do processo de usinagem. Porém, graças à máquina fresadora e às suas ferramentas
A U A UL LA Fresagem As peças a serem usinadas podem ter as mais variadas formas. Este poderia ser um fator de complicação do processo de usinagem. Porém, graças à máquina fresadora e às suas ferramentas
Título: Controle de um sistema Bola- Barra com realimentação através de imagem
 Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
CAPITAL DE GIRO: ESSÊNCIA DA VIDA EMPRESARIAL
 CAPITAL DE GIRO: ESSÊNCIA DA VIDA EMPRESARIAL Renara Tavares da Silva* RESUMO: Trata-se de maneira ampla da vitalidade da empresa fazer referência ao Capital de Giro, pois é através deste que a mesma pode
CAPITAL DE GIRO: ESSÊNCIA DA VIDA EMPRESARIAL Renara Tavares da Silva* RESUMO: Trata-se de maneira ampla da vitalidade da empresa fazer referência ao Capital de Giro, pois é através deste que a mesma pode
Kit de Máquinas Elétricas Rotativas - XE801 -
 T e c n o l o g i a Kit de Máquinas Elétricas Rotativas - XE801 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. INTRODUÇÃO Kit de Máquinas Elétricas Rotativas -
T e c n o l o g i a Kit de Máquinas Elétricas Rotativas - XE801 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. INTRODUÇÃO Kit de Máquinas Elétricas Rotativas -
( Curso Dimensionamento de Estruturas de Aço CBCA módulo 3)
") GALPÕES (Projeto proposto) A ligação mais imediata que se faz da palavra galpão é com o uso industrial. No entanto galpões podem ser usados para as mais diversas atividades, tais como, hangares, espaços
GALPÕES (Projeto proposto) A ligação mais imediata que se faz da palavra galpão é com o uso industrial. No entanto galpões podem ser usados para as mais diversas atividades, tais como, hangares, espaços
Sensores. Sensor. Passivos: Chave Potenciômetro Energia Auxiliar. Ativos: Célula Fotoelétrica Cristal Piezoelétrico. Digitais: Encoder Régua Óptica
 Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Controlo de servomotores com o microcontrolador BX-24
 Controlo de servomotores com o microcontrolador BX-24 Introdução Este documento descreve como se podem controlar servomotores através do BX- 24. É exemplificado o controlo de servomotores normais, assim
Controlo de servomotores com o microcontrolador BX-24 Introdução Este documento descreve como se podem controlar servomotores através do BX- 24. É exemplificado o controlo de servomotores normais, assim
3. FORMAÇÃO DA IMAGEM
 3. FORMAÇÃO DA IMAGEM 3.1 INTRODUÇÃO O sistema de geração da imagem de RM emprega muitos fatores técnicos que devem ser considerados, compreendidos e algumas vezes modificados no painel de controle durante
3. FORMAÇÃO DA IMAGEM 3.1 INTRODUÇÃO O sistema de geração da imagem de RM emprega muitos fatores técnicos que devem ser considerados, compreendidos e algumas vezes modificados no painel de controle durante