Curso Automação Industrial Aula 3 Robôs e Seus Periféricos. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
|
|
|
- Regina Meneses Peixoto
- 8 Há anos
- Visualizações:
Transcrição
1 Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica

2 Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos Aplicações de Robôs (seminário em grupo) Programação de Robôs Laboratório Introdução ao Comando numérico (CN) Prova (P1) Características Gerais de CNC CAD/CAM e Funções de Programação Funções de Programação (continuação) Programação de CNC Laboratório Célula de Manufatura Prova (P2)
 Programação de CNC Laboratório Célula de")
3 Aula 3 Robôs e seus Periféricos Sistemas de acionamento Garras

4 Sistemas de Acionamentos Os acionadores são dispositivos responsáveis pelo movimento das articulações e do desempenho dinâmico do robô. Esses dispositivos podem ser elétricos, hidráulicos ou pneumáticos, cada um com suas características. Acionamento Hidráulico Permite valores elevados de velocidade e de força A grande desvantagem é o seu elevado custo Preferíveis em ambientes nos quais os drives elétricos poderão causar incêndios, como seja na pintura Acionamento Elétrico Oferecem menor velocidade e força (comparativamente aos hidráulicos) Permitem maior precisão, maior repetibilidade e mais limpos na utilização Dois tipos de acionamentos elétricos: motores passo a passo (controle em malha fechada ou aberta) e servomotores DC (controle em malha fechada). Os últimos são os mais utilizados, permitindo movimentos controláveis de forma contínua e suave. Acionamento Pneumático Utilizado em robôs de pequeno porte e que possuam poucos graus de liberdade Baixo custo (mais econômico que os anteriores)
 Permitem maior precisão, maior repetibilidade e mais limpos na utilização Dois tipos de")
5 Acionamento Hidráulico Os principais componentes deste sistema são: motor, cilindro, bomba de óleo, válvula e tanque de óleo. O motor é responsável pelo fluxo de óleo no cilindro em direção ao pistão que movimenta a junta. Assim, este tipo de acionador é geralmente associado a robôs de maior porte, quando comparados aos acionadores pneumáticos e elétricos. Entretanto a precisão em relação aos acionadores elétricos é menor. Existem diversos tipos diferentes de motores hidráulicos, como motor de palheta, de engrenagem, de lóbulos, etc., e todos eles apresentam características de alto torque especifico, ou seja, torque elevado com massa e volume reduzidos. São, portanto, apropriados para braços que manipulam grandes cargas. Em contrapartida, a exigência de elementos de controle e pressurização do fluido hidráulico faz com que o custo destes sistemas seja elevado, tornando-se vantajoso apenas em braços de grande porte.

6 Acionamento Hidráulico Apresentam, adicionalmente, problemas de manutenção, já que podem ocorrer vazamentos do fluido e desgaste na bomba e motores. Deve ser mencionado, finalmente, que atuadores hidráulicos lineares são mais compactos e robustos do que seus equivalentes elétricos ou mesmo pneumáticos, e com isso são indicados para uso em robôs do tipo pórtico ou esféricos, que utilizam juntas prismáticas.

7 Acionadores Elétricos Geralmente robôs de tamanho pequeno a médio utilizam acionadores elétricos. Os acionadores elétricos mais comuns em uso nos robôs são: motor de corrente continua ou DC, servomotor e motor de passo. Esses tipos de acionadores não propiciam muita velocidade ou potência, quando comparados com acionadores hidráulicos, porem atingem maior precisão. Em geral são dotados de redutores para reduzir a velocidade e aumentar o torque. Acionamentos elétricos podem ser utilizados em juntas prismáticas, com a transformação do movimento rotativo do motor em movimento linear por meio de um fuso.

8 Acionadores Elétricos Motores elétricos lineares não são utilizados, pois produzem forças de pequena intensidade. O custo do acionamento elétrico cresce com o torque necessário para acionar o braço mecânico, já o tamanho do motor é praticamente proporcional ao conjugado produzido. Por outro lado, a simples redução da velocidade, por meio de redutor, embora propicie maior precisão e maior torque, reduz significativamente a produtividade. Maior torque significa maior velocidade ou maior carga, e ambos são desejáveis. O custo de acionadores hidráulicos cresce também com a demanda de torque, porem de forma mais lenta, já que tais motores tendem a ser mais compactos. Adicionalmente o custo dos equipamentos de condicionamento e controle do fluido hidráulico é alto e pouco influenciado pela escala. Isto indica, que o acionamento elétrico é mais vantajoso economicamente em braços de pequeno e médio porte, ao passo que o acionamento hidráulico é melhor quando se trata de gerar grandes potências e cargas.

9 Acionadores Elétricos Servo-motores Servo-motores são compostos por motores DC e um redutor de velocidade, junto com um sensor de posição e um sistema de controle re-alimentado. Em outras palavras, os servomotores podem ser considerados como sendo motores comandados em posição (angular ou linear), já que, do ponto de vista de quem os utiliza, o controle interno em malha fechada é irrelevante. Os servo-motores são pequenos, com ampla variação de torques. O mecanismo de posicionamento ajusta a posição angular por meio de um sinal codificado que lhe é enviado. Enquanto esse código estiver na entrada, o servo ira manter a sua posição angular. Em geral o sinal e do tipo PWM (Pulse Width Modulation), ou seja, a posição angular ira depender da largura do pulso enviado.

10 Acionadores Elétricos Motor de passo Os motores de passo são usados em aplicações de serviço relativamente leves e algumas das suas características de desempenho são apresentadas a seguir: Rotação em sentido horário e anti-horário; Variações incrementais de precisão angular; Repetição de movimentos bastante exatos; Baixo torque; Um torque de sustentação a velocidade zero; Possibilidade de controle digital. Os motores de passo podem ser bipolares ou unipolares. Em ambos os casos as fontes utilizadas são de tensão continua e requerem um circuito digital que produza as seqüências de sinais para que o motor funcione corretamente. A forma com que o motor ira operar dependera bastante do que se deseja controlar. Existem casos em que o torque é mais importante, em outras a precisão ou mesmo a velocidade são mais relevantes. Ao trabalhar com motores de passo, precisa-se de algumas características de funcionamento, como a tensão de alimentação, a máxima corrente elétrica suportada nas bobinas, o grau (precisão), o torque. Motores de passo podem ser acionados de diversas formas. As duas formas mais comuns são: passo completo e meio passo. No modo de operação em passo completo pode-se acionar apenas uma ou duas bobinas a cada passo. No primeiro caso apenas uma bobina é energizada a cada passo, o torque gerado é menor, assim como o consumo.

11 Acionadores Pneumáticos Os acionadores pneumáticos são semelhantes aos acionadores hidráulicos, porem a diferença é a utilização de ar ao invés de óleo. Entretanto o ar é altamente compressível, o que causa uma baixa precisão e força, mas estes acionadores possuem alta velocidade. Acionadores pneumáticos lineares (cilindros) requerem sistemas sofisticados e complexos para controlarem a posição em pontos ao longo do curso. Justamente por isso, são pouco utilizados em aplicações que tenham tal necessidade. Porem, diversas tarefas de produção podem ser automatizadas com atuadores pneumáticos lineares trabalhando entre os extremos de posição, ou seja, totalmente recolhido ou totalmente estendido, que apresentam boa repetibilidade. Estas tarefas em geral são simples, consistindo de movimentação de material, fixação de peças e separação de objetos, chamadas genericamente de operações pega-e-poe.

12 Acionadores Pneumáticos O baixo custo dos acionadores pneumáticos e da geração de arcomprimido faz com que a automação pneumática seja a mais adequada se o trabalho a ser realizado for simples. Pode-se utilizar o acionamento pneumático em juntas rotativas de forma direta (acionadores rotativos) ou com redutores (motores pneumáticos de lóbulos ou palhetas). Tais aplicações são, contudo, muito especificas e indicadas apenas quando houver restrições quanto ao acionamento elétrico ou hidráulico. A programação de sistemas pneumáticos pode ser realizada com controladores lógicos programáveis (PLC), ou mesmo por chaves distribuidoras e chaves fim-de-curso. Este tipo de programação permite certa flexibilidade na seqüência de acionamentos, porem é bastante limitada no que se refere a mudanças na forma e no tipo de tarefa executada. Pode-se dizer, portanto, que sistemas pneumáticos estão mais próximos de uma automação fixa do que da automação programável.
, ou mesmo por chaves distribuidoras e chaves fim-de-curso.")
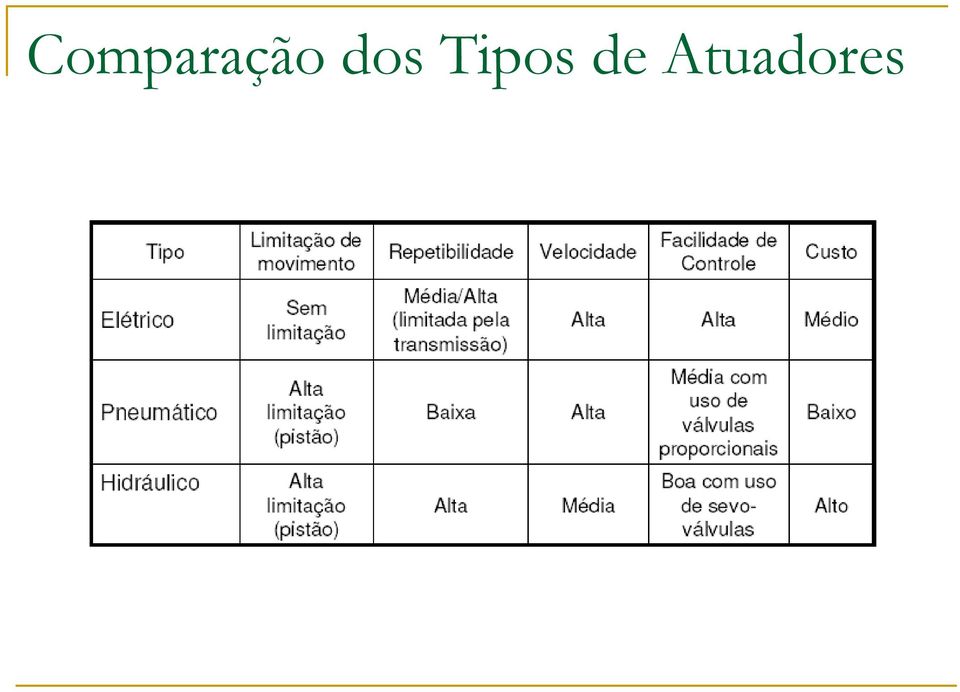
13 Comparação dos Tipos de Atuadores

14 Comparação dos Tipos de Atuadores
15 Métodos de Acionamento Os acionadores elétricos tendem a ser maiores e mais pesados que acionadores hidráulicos e pneumáticos. Por este motivo, nem sempre é possível posicionar tais atuadores próximos as respectivas juntas, em virtude de restrições no espaço disponível ou de problemas com deflexões devido ao peso. Assim sendo, os acionadores podem ser acoplados de forma direta ou indireta.

16 Métodos de Acionamento Acionamento indireto Uma vez que os atuadores das juntas são pesados, os fabricantes tentam introduzir alterações no projeto que permitam redução do peso nas juntas próximas ao pulso e transferir este peso, quando possível, para a base. Desta forma consegue-se uma capacidade de carga maior para o braço. Este tipo de acionamento é denominado indireto, já que o atuador fica afastado da junta movida por ele. Neste tipo de acionamento, é necessário usar algum tipo de transmissão de potência, como polias, correntes, rodas dentadas, engrenagens, parafusos e correias, ou seja, o acionador é adaptado longe da junta pretendida do manipulador. Entretanto este método sofre efeitos indesejados no desempenho do robô, devido a folga nas engrenagens, flexão dos vínculos do manipulador, escorregamento dos sistemas de polias.

17 Métodos de Acionamento Acionamento direto Neste método, o acionador é adaptado diretamente na junta, o que, em determinados casos, proporciona melhor precisão e rendimento de potência em relação ao acionamento indireto. Contudo, devido ao baixo torque por unidade de peso alcançado pelos motores elétricos, costuma-se utilizá-los em conjunto com redutores de engrenagens, que aumentam o torque, porem reduzem a velocidade. Neste caso, se o acionador estiver fixado no elo motor, o acionamento é considerado direto. Nas juntas rotativas com acionamento direto, o sensor de posição angular ( encoder ) fornece o angulo relativo entre o elo motor e o elo movido. No acionamento indireto esta leitura fornece o angulo do elo movido em relação a um outro elo, anterior ao elo motor.

18 Órgão Terminal Na robótica, órgão terminal é usado para descrever a mão ou ferramenta que esta conectada ao pulso, como por exemplo, uma pistola de solda, garras, pulverizadores de tintas, entre outros. O órgão terminal é o responsável por realizar a manipulação de objetos em diferentes tamanhos, formas e materiais, porem esta manipulação depende da aplicação ao qual se destina. É valido ressaltar que os órgãos terminais requerem cuidados ao serem projetados, pois é necessário controlar a força que esta sendo aplicada num objeto. Para isso, alguns órgãos terminais são dotados de sensores que fornecem informações sobre os objetos. Existe uma grande variedade de modelos de garras que podem ser utilizadas em diversas aplicações.

19 Tipos de Garras Garras de dois dedos: É o tipo mais comum; Tem grande variedade de forma - diferenciados pelo tamanho e/ou movimento dos dedos; Dedos com movimento paralelo ou de rotação; Desvantagem - limitação da abertura dos dedos, não serve para grandes objetos.

20 Tipos de Garras Garras com dedos articulados: Projetadas para agarrar objetos de diferentes tamanhos e formas. Os dedos são articulados e formado por diversos vínculos; Sua destreza em segurar objetos de formas irregulares e tamanhos diferentes se deve ao grande número de vínculo; Podem ter dois ou mais dedos; Os vínculos são movimentados por pares de cabos, onde um cabo flexiona a articulação e o outro a estende.

21 Tipos de Garras Garra para objetos cilíndricos: Consiste de dois dedos com vários semicírculos chanfrados; Permite segurar objetos cilíndricos de vários diâmetros diferentes.
22 Tipos de Garras Garra para objetos frágeis: Exercem força controlada durante a operação de segurar algum objeto; Não causam dano ao objeto; Formada por dedos flexíveis dedos se curvam de forma a agarrar um objeto frágil; Operação em geral pneumática ou elétrica; Podem ter controle ativo da pressão de contato com o objeto - mas para isso exige sensor de pressão.
23 Tipos de Garras Garras a vácuo: Garras a vácuo são projetados para prender uma superfície lisa pela ação do vácuo; Possuem ventosas de sucção conectadas a uma bomba de ar comprimido; Sevem para superfícies tipo chapas metálicas e caixas de papelão; Para reduzir o risco de mal funcionamento devido a perda de vácuo é comum usar mais do que uma ventosa de sucção.
24 Tipos de Garras Garras eletromagnéticas: São utilizadas para segurar objetos que podem ser magnetizados (aço e níquel) através de um campo magnético; São muito eficientes: Podem segurar objetos de vários tamanhos; Não necessitam de grande precisão no posicionamento da garra.
25 Exemplos de garras
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras Tipos de Sistemas
Prof. Daniel Hasse Robótica Industrial Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras Tipos de Sistemas
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Sensores e Atuadores (2)
") (2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
(2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
6. CILINDROS PNEUMÁTICOS
 6. CILINDROS PNEUMÁTICOS Os cilindros, também conhecidos como atuadores lineares, são elementos pneumáticos de trabalho os quais transformam a energia proveniente do ar comprimido em energia mecânica,
6. CILINDROS PNEUMÁTICOS Os cilindros, também conhecidos como atuadores lineares, são elementos pneumáticos de trabalho os quais transformam a energia proveniente do ar comprimido em energia mecânica,
Fundamentos de Automação. Hidráulica 01/06/2015. Hidráulica. Hidráulica. Hidráulica. Considerações Iniciais CURSO DE AUTOMAÇÃO INDUSTRIAL
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação CURSO
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação CURSO
Sensores. Sensor. Passivos: Chave Potenciômetro Energia Auxiliar. Ativos: Célula Fotoelétrica Cristal Piezoelétrico. Digitais: Encoder Régua Óptica
 Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ. Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial Jhonathan Junio de Souza Motores de Passo Trabalho apresentado à disciplina
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ Câmpus Ponta Grossa Coordenação do Curso Superior de Tecnologia em Automação Industrial Jhonathan Junio de Souza Motores de Passo Trabalho apresentado à disciplina
Robótica Industrial. Projeto de Manipuladores
 Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1 Robótica e Mecatrônica 2 Princípios
Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1 Robótica e Mecatrônica 2 Princípios
Motores em miniatura proporcionam um grande desempenho para analisadores médicos
 thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.
![Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.](/thumbs/26/7510700.jpg "Potenciometer [Potenciômetro] - Ligado ao eixo de saída do servo, monitora a posição do mesmo.") Servomotores Este pequeno tutorial tem como finalidade auxiliar no entendimento de um dos componentes básico utilizados na construção de robôs móveis. www.sumoderobos.org Compilado por André Santos Agosto
Servomotores Este pequeno tutorial tem como finalidade auxiliar no entendimento de um dos componentes básico utilizados na construção de robôs móveis. www.sumoderobos.org Compilado por André Santos Agosto
Como funciona o motor de corrente contínua
 Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Sistemas Pneumáticos
 UNIVERSIDADE FEDERAL DE PELOTAS CENTRO DE ENGENHARIAS ENGENHARIA DE PRODUÇÃO AUTOMAÇÃO INDUSTRIAL Sistemas Pneumáticos Gilson PORCIÚNCULA wp.ufpel.edu.br/porciuncula Estrutura de um circuito Pneumático
UNIVERSIDADE FEDERAL DE PELOTAS CENTRO DE ENGENHARIAS ENGENHARIA DE PRODUÇÃO AUTOMAÇÃO INDUSTRIAL Sistemas Pneumáticos Gilson PORCIÚNCULA wp.ufpel.edu.br/porciuncula Estrutura de um circuito Pneumático
APLICAÇÕES INDUSTRIAIS DE ROBÔS
 Material de estudo APLICAÇÕES INDUSTRIAIS DE ROBÔS 2010 Lívia F. Silva Mendes APLICAÇÕES INDUSTRIAIS DE ROBÔS Os robôs têm vindo a ser utilizados numa gama muito variada de aplicações industriais. As primeiras
Material de estudo APLICAÇÕES INDUSTRIAIS DE ROBÔS 2010 Lívia F. Silva Mendes APLICAÇÕES INDUSTRIAIS DE ROBÔS Os robôs têm vindo a ser utilizados numa gama muito variada de aplicações industriais. As primeiras
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
Acoplamento. Uma pessoa, ao girar o volante de seu automóvel, Conceito. Classificação
 A U A UL LA Acoplamento Introdução Uma pessoa, ao girar o volante de seu automóvel, percebeu um estranho ruído na roda. Preocupada, procurou um mecânico. Ao analisar o problema, o mecânico concluiu que
A U A UL LA Acoplamento Introdução Uma pessoa, ao girar o volante de seu automóvel, percebeu um estranho ruído na roda. Preocupada, procurou um mecânico. Ao analisar o problema, o mecânico concluiu que
Lubrificação III. Após a visita de um vendedor de lubrificante. Outros dispositivos de lubrificação
 A U A UL LA Lubrificação III Introdução Após a visita de um vendedor de lubrificante ao setor de manutenção de uma indústria, o pessoal da empresa constatou que ainda não conhecia todos os dispositivos
A U A UL LA Lubrificação III Introdução Após a visita de um vendedor de lubrificante ao setor de manutenção de uma indústria, o pessoal da empresa constatou que ainda não conhecia todos os dispositivos
Arquitetura das Unidades de Controle Eletrônico
 Arquitetura das Unidades de Controle Eletrônico Antes que a unidade eletrônica de controle (Electronic Control Unit ECU) atue de forma precisa no motor, a ECU deve estimar com a maior de precisão possível
Arquitetura das Unidades de Controle Eletrônico Antes que a unidade eletrônica de controle (Electronic Control Unit ECU) atue de forma precisa no motor, a ECU deve estimar com a maior de precisão possível
JATEAMENTO - INTRODUÇÃO APLICAÇÃO
 www.sinto.com.br JATEAMENTO - INTRODUÇÃO APLICAÇÃO O Jateamento com abrasivo é um método de trabalho a frio que consiste no arremesso de partículas contra uma determinada superfície, a elevadas velocidades,
www.sinto.com.br JATEAMENTO - INTRODUÇÃO APLICAÇÃO O Jateamento com abrasivo é um método de trabalho a frio que consiste no arremesso de partículas contra uma determinada superfície, a elevadas velocidades,
Introdução. Aplicações
 Motor de Passo Introdução Os motores de passo preenchem um nicho único no mundo dos motores controlados. Estes motores são usualmente empregados em aplicações de medição e de controle. Aplicações Aplicações
Motor de Passo Introdução Os motores de passo preenchem um nicho único no mundo dos motores controlados. Estes motores são usualmente empregados em aplicações de medição e de controle. Aplicações Aplicações
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA)
") ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
ACIONAMENTOS ELETRÔNICOS (INVERSOR DE FREQUÊNCIA) 1. Introdução 1.1 Inversor de Frequência A necessidade de aumento de produção e diminuição de custos faz surgir uma grande infinidade de equipamentos desenvolvidos
Cortina Elétrica com Controle Remoto
 FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA CURSO TÉCNICO EM MECÂNICA 1º SÉRIE DO ENSINO MÉDIO Turma 3111 Trabalho Trimestral de Física Cortina Elétrica com Controle Remoto Arian Müller (03)
FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA CURSO TÉCNICO EM MECÂNICA 1º SÉRIE DO ENSINO MÉDIO Turma 3111 Trabalho Trimestral de Física Cortina Elétrica com Controle Remoto Arian Müller (03)
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA
 FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
Conceitos Básicos de Automação. Exemplo Motivador
 Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2011/02 Exemplo Motivador Para uma furação manual o operador usava os olhos, o tato e a contração de seus braços para avaliar a evolução do furo
Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2011/02 Exemplo Motivador Para uma furação manual o operador usava os olhos, o tato e a contração de seus braços para avaliar a evolução do furo
Compressor Parafuso. Principais tipos: Parafuso simples. Parafuso duplo (mais empregado)
") Principais tipos: Parafuso simples Parafuso duplo (mais empregado) Vantagens em relação aos alternativos: Menor tamanho Número inferior de partes móveis Desvantagens em relação aos alternativos: Menor
Principais tipos: Parafuso simples Parafuso duplo (mais empregado) Vantagens em relação aos alternativos: Menor tamanho Número inferior de partes móveis Desvantagens em relação aos alternativos: Menor
DESCRITIVO TÉCNICO. 1 Alimentador
 DESCRITIVO TÉCNICO Nome Equipamento: Máquina automática para corte de silício 45º e perna central até 400 mm largura Código: MQ-0039-NEP Código Finame: *** Classificação Fiscal: 8462.39.0101 1 Alimentador
DESCRITIVO TÉCNICO Nome Equipamento: Máquina automática para corte de silício 45º e perna central até 400 mm largura Código: MQ-0039-NEP Código Finame: *** Classificação Fiscal: 8462.39.0101 1 Alimentador
ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102
 Universidade Federal do Paraná Curso de Engenharia Industrial Madeireira ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102 Dr. Alan Sulato de Andrade alansulato@ufpr.br INTRODUÇÃO: Embreagens são elementos que
Universidade Federal do Paraná Curso de Engenharia Industrial Madeireira ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102 Dr. Alan Sulato de Andrade alansulato@ufpr.br INTRODUÇÃO: Embreagens são elementos que
Fundamentos de Automação
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Conceito,
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Conceito,
Título: Controle de um sistema Bola- Barra com realimentação através de imagem
 Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Descrição dos pinos do Módulo Driver Motor com Dupla Ponte-H - L298N:
 O MÓDULO DRIVER MOTOR COM DUPLA PONTEH - L298N é baseado no chip L298N com dupla Ponte- H, podendo controlar a velocidade e o sentido de giro de até dois motores de 3-30V DC ou um motor de passo com 2
O MÓDULO DRIVER MOTOR COM DUPLA PONTEH - L298N é baseado no chip L298N com dupla Ponte- H, podendo controlar a velocidade e o sentido de giro de até dois motores de 3-30V DC ou um motor de passo com 2
SISTEMAS DE TRANSPORTADORES CONTINUOS
 Consiste na movimentação constante entre dois pontos pré-determinados. d São utilizados em mineração, indústrias, terminais de carga e descarga, terminais de recepção e expedição ou em armazéns. Esteiras
Consiste na movimentação constante entre dois pontos pré-determinados. d São utilizados em mineração, indústrias, terminais de carga e descarga, terminais de recepção e expedição ou em armazéns. Esteiras
Escola de Educação Profissional SENAI Visconde de Mauá
 Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Novembro de 2014 Revisão: A Prof Vander Campos Conhecer os principais conceitos e aplicações dos Servoacionamentos;
Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Novembro de 2014 Revisão: A Prof Vander Campos Conhecer os principais conceitos e aplicações dos Servoacionamentos;
Funções de Posicionamento para Controle de Eixos
 Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
Automação industrial Sensores
 Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Controle de Múltiplos Pivôs Centrais com um único Conjunto Motor-Bomba
 Controle de Múltiplos Pivôs Centrais com um único Conjunto Motor-Bomba Thiago de Lima MUNIZ, Bernardo Pinheiro de ALVARENGA, José Wilson de Lima NERYS, Antônio Marcos de Melo MEDEIROS Escola de Engenharia
Controle de Múltiplos Pivôs Centrais com um único Conjunto Motor-Bomba Thiago de Lima MUNIZ, Bernardo Pinheiro de ALVARENGA, José Wilson de Lima NERYS, Antônio Marcos de Melo MEDEIROS Escola de Engenharia
Mandrilamento. determinado pela operação a ser realizada. A figura a seguir mostra um exemplo de barra de mandrilar, também chamada de mandril.
 A UU L AL A Mandrilamento Nesta aula, você vai tomar contato com o processo de mandrilamento. Conhecerá os tipos de mandrilamento, as ferramentas de mandrilar e as características e funções das mandriladoras.
A UU L AL A Mandrilamento Nesta aula, você vai tomar contato com o processo de mandrilamento. Conhecerá os tipos de mandrilamento, as ferramentas de mandrilar e as características e funções das mandriladoras.
CAPÍTULO 2 - TIPOS DE MÁQUINAS ASSÍNCRONAS TRIFÁSICAS
 CAPÍTULO 2 - TIPOS DE MÁQUINAS ASSÍNCRONAS TRIFÁSICAS 2.1 INTRODUÇÃO O objetivo do presente trabalho é estudar o funcionamento em regime permanente e em regime dinâmico da Máquina Assíncrona Trifásica
CAPÍTULO 2 - TIPOS DE MÁQUINAS ASSÍNCRONAS TRIFÁSICAS 2.1 INTRODUÇÃO O objetivo do presente trabalho é estudar o funcionamento em regime permanente e em regime dinâmico da Máquina Assíncrona Trifásica
Eletromecânicos de Manutenção Industrial
 Eletromecânicos de Manutenção Industrial Motor de passo a passo 2013/ 2014 1 Motores passo a passo Os motores de passo são dispositivos eletromecânicos que convertem pulsos elétricos em movimentos mecânicos
Eletromecânicos de Manutenção Industrial Motor de passo a passo 2013/ 2014 1 Motores passo a passo Os motores de passo são dispositivos eletromecânicos que convertem pulsos elétricos em movimentos mecânicos
As peças a serem usinadas podem ter as
 A U A UL LA Fresagem As peças a serem usinadas podem ter as mais variadas formas. Este poderia ser um fator de complicação do processo de usinagem. Porém, graças à máquina fresadora e às suas ferramentas
A U A UL LA Fresagem As peças a serem usinadas podem ter as mais variadas formas. Este poderia ser um fator de complicação do processo de usinagem. Porém, graças à máquina fresadora e às suas ferramentas
Escola de Educação Profissional SENAI Visconde de Mauá
 Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Maio de 2014 Revisão: A Prof Vander Campos Conhecer os princípios básicos do inversor de frequência; Saber interpretar
Escola de Educação Profissional SENAI Visconde de Mauá Automação Industrial Porto Alegre, Maio de 2014 Revisão: A Prof Vander Campos Conhecer os princípios básicos do inversor de frequência; Saber interpretar
Controle universal para motor de passo
 Controle universal para motor de passo No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo
Controle universal para motor de passo No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo
Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles!
 Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles! É importante lembrar que esta matéria serve para qualquer tipo de servo utilizado em aeromodelismo. Figura 1 Um dos diversos
Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles! É importante lembrar que esta matéria serve para qualquer tipo de servo utilizado em aeromodelismo. Figura 1 Um dos diversos
ESPECIFICAÇÃO TÉCNICA
 ESPECIFICAÇÃO TÉCNICA CANCELA PARA AUTOMAÇÃO DO SISTEMA GEST Controle de Revisões Elaborador: Luiz Coelho Alves da Silva Neto Validador: Adriano José Cunha de Aguiar Aprovador: Camilo Magalhães de Sales
ESPECIFICAÇÃO TÉCNICA CANCELA PARA AUTOMAÇÃO DO SISTEMA GEST Controle de Revisões Elaborador: Luiz Coelho Alves da Silva Neto Validador: Adriano José Cunha de Aguiar Aprovador: Camilo Magalhães de Sales
Principais funções de movimento em analisadores médicos.
 Movimento em analisadores médicos Menor, mais rápido, mais forte. Como os motores em miniatura estão ajudando os equipamentos de diagnóstico a avançar. Os diagnósticos médicos fazem parte da vida cotidiana
Movimento em analisadores médicos Menor, mais rápido, mais forte. Como os motores em miniatura estão ajudando os equipamentos de diagnóstico a avançar. Os diagnósticos médicos fazem parte da vida cotidiana
Décima segunda aula de teoria de ME5330. Maio de 2011
 Décima segunda aula de teoria de ME5330 Maio de 011 Vamos iniciar o estudo do inversor de frequência. Conceito dispositivo eletrônico que transforma energia elétrica CA fixa ( tensão e frequência ) em
Décima segunda aula de teoria de ME5330 Maio de 011 Vamos iniciar o estudo do inversor de frequência. Conceito dispositivo eletrônico que transforma energia elétrica CA fixa ( tensão e frequência ) em
Automatismos Industriais
 Automatismos Industriais Introdução à Pneumática Nos actuais sistemas de automação a pneumática é um elemento muito importante pois está presente num vasto numero de aplicações, seja como sistema totalmente
Automatismos Industriais Introdução à Pneumática Nos actuais sistemas de automação a pneumática é um elemento muito importante pois está presente num vasto numero de aplicações, seja como sistema totalmente
INTRODUÇÃO À ROBÓTICA
 Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Programação de Robótica: Modo Circuitos Programados - Avançado -
 Programação de Robótica: Modo Circuitos Programados - Avançado - 1 Programação de Robótica: Modo Circuitos Programados - Avançado ATENÇÃO Lembramos que você poderá consultar o Manual de Referência do Software
Programação de Robótica: Modo Circuitos Programados - Avançado - 1 Programação de Robótica: Modo Circuitos Programados - Avançado ATENÇÃO Lembramos que você poderá consultar o Manual de Referência do Software
Motores de tração em corrente alternada: Estudo do desempenho na CPTM. Introdução
 Motores de tração em corrente alternada: Estudo do desempenho na CPTM Introdução Os motores de tração são os equipamentos responsáveis pela propulsão dos trens. Sua falha implica na diminuição do desempenho
Motores de tração em corrente alternada: Estudo do desempenho na CPTM Introdução Os motores de tração são os equipamentos responsáveis pela propulsão dos trens. Sua falha implica na diminuição do desempenho
Miguel C. Branchtein, Delegacia Regional do Trabalho no Rio Grande do Sul
 DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
Medição tridimensional
 A U A UL LA Medição tridimensional Um problema O controle de qualidade dimensional é tão antigo quanto a própria indústria, mas somente nas últimas décadas vem ocupando a importante posição que lhe cabe.
A U A UL LA Medição tridimensional Um problema O controle de qualidade dimensional é tão antigo quanto a própria indústria, mas somente nas últimas décadas vem ocupando a importante posição que lhe cabe.
23/04/2010. T u t o r i a l 2003. Universidade Salvador - Unifacs Núcleo de Pesquisa em Redes de Computadores Salvador Bahia Brasil
 Motor de Passo Autor : Ricardo Alexandro de A. Queiroz ( raaq@cpunet.com.br ) Orientador : Augusto Loureiro da Costa ( loureiro@im.ufba.br ) T u t o r i a l 2003 Universidade Salvador - Unifacs Núcleo
Motor de Passo Autor : Ricardo Alexandro de A. Queiroz ( raaq@cpunet.com.br ) Orientador : Augusto Loureiro da Costa ( loureiro@im.ufba.br ) T u t o r i a l 2003 Universidade Salvador - Unifacs Núcleo
Sistema de Proporcionamento Bomba dosadora de LGE Fire Dos
 Sistema de Proporcionamento Bomba dosadora de LGE Fire Dos Descrição A bomba dosadora de LGE FIRE DOS é o mais versátil sistema de proporcionamento existente no mercado. Este revolucionário sistema de
Sistema de Proporcionamento Bomba dosadora de LGE Fire Dos Descrição A bomba dosadora de LGE FIRE DOS é o mais versátil sistema de proporcionamento existente no mercado. Este revolucionário sistema de
VÁLVULAS. Válvulas de Regulagem São destinadas especificamente para controlar o fluxo, podendo por isso trabalhar em qualquer posição de fechamento.
 VÁLVULAS São dispositivos destinados a estabelecer, controlar e interromper o fluxo em uma tubulação. São acessórios muito importantes nos sistemas de condução, e por isso devem merecer o maior cuidado
VÁLVULAS São dispositivos destinados a estabelecer, controlar e interromper o fluxo em uma tubulação. São acessórios muito importantes nos sistemas de condução, e por isso devem merecer o maior cuidado
Fundamentos de Automação. Atuadores e Elementos Finais de Controle
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Atuadores
TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES
 TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES 1) MOTORES Motores de passo e servo-motores (com ou sem escovas) têm cada um suas respectivas vantagens e desvantagens. Em geral não existe
TECONOLOGIAS EMPREGADAS NO ACIONAMENTO DE ROBÔS MANIPULADORES 1) MOTORES Motores de passo e servo-motores (com ou sem escovas) têm cada um suas respectivas vantagens e desvantagens. Em geral não existe
. linear ou rotativo. analógico ou digital. absoluto, incremental ou incremental-absoluto. princípio de operação
 8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
Diretrizes para determinação de intervalos de comprovação para equipamentos de medição.
 Diretrizes para determinação de intervalos de comprovação para equipamentos de medição. De acordo com a Norma NBR 1001, um grande número de fatores influência a freqüência de calibração. Os mais importantes,
Diretrizes para determinação de intervalos de comprovação para equipamentos de medição. De acordo com a Norma NBR 1001, um grande número de fatores influência a freqüência de calibração. Os mais importantes,
ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102
 Universidade Federal do Paraná Curso de Engenharia Industrial Madeireira ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102 Dr. Alan Sulato de Andrade alansulato@ufpr.br INTRODUÇÃO: Nem sempre as unidades geradoras
Universidade Federal do Paraná Curso de Engenharia Industrial Madeireira ELEMENTOS ORGÂNICOS DE MÁQUINAS II AT-102 Dr. Alan Sulato de Andrade alansulato@ufpr.br INTRODUÇÃO: Nem sempre as unidades geradoras
Eletrônicos PAE. Componente Curricular: Práticas de Acionamentos. 5.ª Prática Inversor de Frequência Vetorial da WEG CFW-08
 1 Componente Curricular: Práticas de Acionamentos Eletrônicos PAE 5.ª Prática Inversor de Frequência Vetorial da WEG CFW-08 OBJETIVO: 1) Efetuar a programação por meio de comandos de parametrização para
1 Componente Curricular: Práticas de Acionamentos Eletrônicos PAE 5.ª Prática Inversor de Frequência Vetorial da WEG CFW-08 OBJETIVO: 1) Efetuar a programação por meio de comandos de parametrização para
PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS
 INFORMATIVO TÉCNICO N 019/09 INFORMATIVO TÉCNICO PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS 1/21 INFORMATIVO TÉCNICO N 019/09 O PRINCIPAL COMPONENTE DE
INFORMATIVO TÉCNICO N 019/09 INFORMATIVO TÉCNICO PRINCIPAIS DEFICIÊNCIAS EM CIRCUITOS HIDRÁULICOS QUE OCASIONAM FALHAS EM BOMBAS HIDRÁULICAS 1/21 INFORMATIVO TÉCNICO N 019/09 O PRINCIPAL COMPONENTE DE
Bancada de Testes Hidrostáticos e Pneumáticos
 Bancada de Testes Hidrostáticos e Pneumáticos 1 Concepção O que é a bancada de testes da Valeq? Esta bancada foi desenvolvia com a intenção de agilizar os testes de campo e de bancada que envolvem pressão.
Bancada de Testes Hidrostáticos e Pneumáticos 1 Concepção O que é a bancada de testes da Valeq? Esta bancada foi desenvolvia com a intenção de agilizar os testes de campo e de bancada que envolvem pressão.
Elementos de Máquinas
 Professor: Leonardo Leódido Sumário Correias e Polias Correntes Definição Polia: São peças cilíndricas, movimentadas pela rotação do eixo do motor e pelas correias. Correias: É o elemento da máquina que,
Professor: Leonardo Leódido Sumário Correias e Polias Correntes Definição Polia: São peças cilíndricas, movimentadas pela rotação do eixo do motor e pelas correias. Correias: É o elemento da máquina que,
Automação Hidráulica
 Automação Hidráulica Definição de Sistema hidráulico Conjunto de elementos físicos associados que, utilizando um fluido como meio de transferência de energia, permite a transmissão e o controle de força
Automação Hidráulica Definição de Sistema hidráulico Conjunto de elementos físicos associados que, utilizando um fluido como meio de transferência de energia, permite a transmissão e o controle de força
Motores Síncronos ADRIELLE C SANTANA
 Motores Síncronos ADRIELLE C SANTANA Motores Síncronos Possuem velocidade fixa e são utilizados para grandes cargas, (em função do seu alto custo que faz com que ele não seja viável para aparelhos menores)
Motores Síncronos ADRIELLE C SANTANA Motores Síncronos Possuem velocidade fixa e são utilizados para grandes cargas, (em função do seu alto custo que faz com que ele não seja viável para aparelhos menores)
Eletrônica Industrial Apostila sobre Modulação PWM página 1 de 6 INTRODUÇÃO
 Eletrônica Industrial Apostila sobre Modulação PWM página 1 de 6 Curso Técnico em Eletrônica Eletrônica Industrial Apostila sobre Modulação PWM Prof. Ariovaldo Ghirardello INTRODUÇÃO Os controles de potência,
Eletrônica Industrial Apostila sobre Modulação PWM página 1 de 6 Curso Técnico em Eletrônica Eletrônica Industrial Apostila sobre Modulação PWM Prof. Ariovaldo Ghirardello INTRODUÇÃO Os controles de potência,
das válvulas de vazão de líquidos e gases
 Válvulas de Vazão de Líquidos e Gases Wagner Britto Vaz de Oliveira 00/16144 Pedro Kouri Paim 00/16063 9 de Junho de 2005 1 Introdução No contexto de automação industrial, válvulas de comando são elementos
Válvulas de Vazão de Líquidos e Gases Wagner Britto Vaz de Oliveira 00/16144 Pedro Kouri Paim 00/16063 9 de Junho de 2005 1 Introdução No contexto de automação industrial, válvulas de comando são elementos
1 ATUADORES HIDRÁULICOS
 1 ATUADORES HIDRÁULICOS Danniela Rosa Sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Aliás, o motor elétrico também é um tipo de atuador.
1 ATUADORES HIDRÁULICOS Danniela Rosa Sua função é aplicar ou fazer atuar energia mecânica sobre uma máquina, levando-a a realizar um determinado trabalho. Aliás, o motor elétrico também é um tipo de atuador.
Automação Industrial Parte 2
 Automação Industrial Parte 2 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Perspectiva Histórica Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
Automação Industrial Parte 2 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Perspectiva Histórica Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA.
 Motores elétricos Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA. Para melhor entender o funcionamento desse
Motores elétricos Os motores de CA podem ser monofásicos ou polifásicos. Nesta unidade, estudaremos os motores monofásicos alimentados por uma única fase de CA. Para melhor entender o funcionamento desse
COMPRESSORES PARAFUSO
 COMPRESSORES PARAFUSO PARTE 1 Tradução e adaptação da Engenharia de Aplicação da Divisão de Contratos YORK REFRIGERAÇÃO. Introdução Os compressores parafuso são hoje largamente usados em refrigeração industrial
COMPRESSORES PARAFUSO PARTE 1 Tradução e adaptação da Engenharia de Aplicação da Divisão de Contratos YORK REFRIGERAÇÃO. Introdução Os compressores parafuso são hoje largamente usados em refrigeração industrial
WWW.RENOVAVEIS.TECNOPT.COM
 Geradores de turbinas eólicas O aerogerador converte a energia mecânica em energia elétrica. Os aerogeradores são não usuais, se comparados com outros equipamentos geradores conectados a rede elétrica.
Geradores de turbinas eólicas O aerogerador converte a energia mecânica em energia elétrica. Os aerogeradores são não usuais, se comparados com outros equipamentos geradores conectados a rede elétrica.
Ensaio de torção. Diz o ditado popular: É de pequenino que
 A UU L AL A Ensaio de torção Diz o ditado popular: É de pequenino que se torce o pepino! E quanto aos metais e outros materiais tão usados no nosso dia-a-dia: o que dizer sobre seu comportamento quando
A UU L AL A Ensaio de torção Diz o ditado popular: É de pequenino que se torce o pepino! E quanto aos metais e outros materiais tão usados no nosso dia-a-dia: o que dizer sobre seu comportamento quando
MOTORES ELÉTRICOS Princípios e fundamentos
 MOTORES ELÉTRICOS Princípios e fundamentos 1 Classificação 2 3 Estator O estator do motor e também constituido por um núcleo ferromagnético laminado, nas cavas do qual são colocados os enrolamentos alimentados
MOTORES ELÉTRICOS Princípios e fundamentos 1 Classificação 2 3 Estator O estator do motor e também constituido por um núcleo ferromagnético laminado, nas cavas do qual são colocados os enrolamentos alimentados
Sua indústria. Seu show. Seu Futuro
 Sua indústria. Seu show. Seu Futuro Usinagem 5-Eixos para Moldes Sandro, Vero Software Vero Software está no topo do relatório de fornecedores de CAM da CIMData 2014 Com maior Market Share, crescimento
Sua indústria. Seu show. Seu Futuro Usinagem 5-Eixos para Moldes Sandro, Vero Software Vero Software está no topo do relatório de fornecedores de CAM da CIMData 2014 Com maior Market Share, crescimento
ESTUDO SOBRE CONTROLE DE MOTORES DE INDUÇÃO TRIFÁSICOS
 ESTUDO SOBRE CONTROLE DE MOTORES DE INDUÇÃO TRIFÁSICOS Autores : Marina PADILHA, Tiago DEQUIGIOVANI. Identificação autores: Engenharia de Controle e Automação - Bolsista Interno; Orientador IFC - Campus
ESTUDO SOBRE CONTROLE DE MOTORES DE INDUÇÃO TRIFÁSICOS Autores : Marina PADILHA, Tiago DEQUIGIOVANI. Identificação autores: Engenharia de Controle e Automação - Bolsista Interno; Orientador IFC - Campus
Material de Apoio INJEÇÃO ELETRÔNICA DE COMBUSTÍVEL BOSCH. Programa Especial - Injeção Eletrônica LE-Jetronic
 INJEÇÃO ELETRÔNICA DE COMBUSTÍVEL BOSCH A necessidade de se reduzir o consumo de combustível dos automóveis, bem como de se manter a emissão de poluentes pelos gases de escape dentro de limites, colocou
INJEÇÃO ELETRÔNICA DE COMBUSTÍVEL BOSCH A necessidade de se reduzir o consumo de combustível dos automóveis, bem como de se manter a emissão de poluentes pelos gases de escape dentro de limites, colocou
ORGANIZAÇÃO DE COMPUTADORES MÓDULO 10
 ORGANIZAÇÃO DE COMPUTADORES MÓDULO 10 Índice 1. A Organização do Computador - Continuação...3 1.1. Memória Primária - II... 3 1.1.1. Memória cache... 3 1.2. Memória Secundária... 3 1.2.1. Hierarquias de
ORGANIZAÇÃO DE COMPUTADORES MÓDULO 10 Índice 1. A Organização do Computador - Continuação...3 1.1. Memória Primária - II... 3 1.1.1. Memória cache... 3 1.2. Memória Secundária... 3 1.2.1. Hierarquias de
Qualificação de Procedimentos
 Qualificação de Procedimentos Os equipamentos em geral são fabricados por meio de uniões de partes metálicas entre si empregando-se soldas. Há, portanto a necessidade de se garantir, nestas uniões soldadas,
Qualificação de Procedimentos Os equipamentos em geral são fabricados por meio de uniões de partes metálicas entre si empregando-se soldas. Há, portanto a necessidade de se garantir, nestas uniões soldadas,
COMO EVITAR O DESPERDÍCIO
 Economia de Água Um universo de possibilidades ao seu alcance COMO EVITAR O DESPERDÍCIO Nossas casas, edifícios e indústrias desperdiçam água, antes mesmo do seu consumo. Aplicar os princípios do uso racional
Economia de Água Um universo de possibilidades ao seu alcance COMO EVITAR O DESPERDÍCIO Nossas casas, edifícios e indústrias desperdiçam água, antes mesmo do seu consumo. Aplicar os princípios do uso racional
Concurso Público para Cargos Técnico-Administrativos em Educação UNIFEI 13/06/2010
 Questão 21 Conhecimentos Específicos - Técnico em Mecânica A respeito das bombas centrífugas é correto afirmar: A. A vazão é praticamente constante, independentemente da pressão de recalque. B. Quanto
Questão 21 Conhecimentos Específicos - Técnico em Mecânica A respeito das bombas centrífugas é correto afirmar: A. A vazão é praticamente constante, independentemente da pressão de recalque. B. Quanto
HTS ELEVADORES IND. E COM. LTDA.
 HTS ELEVADORES IND. E COM. LTDA. ELEVADORES DE OBRA ELEVADOR DE OBRA ELEVADOR DE OBRA Controle automático digital Eficiência de consumo: quando o a velocidade ou carga está abaixo da condição de regime
HTS ELEVADORES IND. E COM. LTDA. ELEVADORES DE OBRA ELEVADOR DE OBRA ELEVADOR DE OBRA Controle automático digital Eficiência de consumo: quando o a velocidade ou carga está abaixo da condição de regime
ESTRATÉGIA DE FUNCIONAMENTO DA TRANSMISSÃO DPS6 DE DUPLA EMBREAGEM DA FORD, APLICADA NOS VEÍCULOS ECOSPORT E NEW FIESTA MODELO 2013.
 ESTRATÉGIA DE FUNCIONAMENTO DA TRANSMISSÃO DPS6 DE DUPLA EMBREAGEM DA FORD, APLICADA NOS VEÍCULOS ECOSPORT E NEW FIESTA MODELO 2013. A FORD desta vez está causando uma verdadeira revolução no campo das
ESTRATÉGIA DE FUNCIONAMENTO DA TRANSMISSÃO DPS6 DE DUPLA EMBREAGEM DA FORD, APLICADA NOS VEÍCULOS ECOSPORT E NEW FIESTA MODELO 2013. A FORD desta vez está causando uma verdadeira revolução no campo das
RET Relatório Técnico de Encerramento Título do Teste TESTE DE HIDROVARIADOR DE VELOCIDADE HENFEL MODELO HFPM2500
 RET Relatório Técnico de Encerramento Título do Teste TESTE DE HIDROVARIADOR DE VELOCIDADE HENFEL MODELO HFPM2500 APLICADO EM ACIONAMENTO DE TRANSPORTADORES DE CORREIA TMPM SÃO LUÍS - MA SAT 1260 Localidade,
RET Relatório Técnico de Encerramento Título do Teste TESTE DE HIDROVARIADOR DE VELOCIDADE HENFEL MODELO HFPM2500 APLICADO EM ACIONAMENTO DE TRANSPORTADORES DE CORREIA TMPM SÃO LUÍS - MA SAT 1260 Localidade,
Introdução ao Controlo Numérico Computorizado I Conceitos Gerais
 Introdução ao Controlo Numérico Computorizado I Conceitos Gerais João Manuel R. S. Tavares Joaquim Oliveira Fonseca Bibliografia Controlo Numérico Computorizado, Conceitos Fundamentais Carlos Relvas Publindústria,
Introdução ao Controlo Numérico Computorizado I Conceitos Gerais João Manuel R. S. Tavares Joaquim Oliveira Fonseca Bibliografia Controlo Numérico Computorizado, Conceitos Fundamentais Carlos Relvas Publindústria,
O que é o motor de passo?
 Universidade Federal Fluminense Centro Tecnológico Escola de Engenharia Curso de Engenharia de Telecomunicações Programa de Educação Tutorial Grupo PET-Tele Motor de Passo Autor atual: Felipe Gonçalves
Universidade Federal Fluminense Centro Tecnológico Escola de Engenharia Curso de Engenharia de Telecomunicações Programa de Educação Tutorial Grupo PET-Tele Motor de Passo Autor atual: Felipe Gonçalves
Comandos Eletro-eletrônicos SENSORES
 Comandos Eletro-eletrônicos SENSORES Prof. Roberto Leal Sensores Dispositivo capaz de detectar sinais ou de receber estímulos de natureza física (tais como calor, pressão, vibração, velocidade, etc.),
Comandos Eletro-eletrônicos SENSORES Prof. Roberto Leal Sensores Dispositivo capaz de detectar sinais ou de receber estímulos de natureza física (tais como calor, pressão, vibração, velocidade, etc.),
Disciplina Higiene do Trabalho. Ventilação Industrial
 Tópicos da Aula Complementar - Ventiladores; - Ventiladores Axiais; - Ventiladores Centrífugos; - Dados necessários para a seleção correta de um ventilador; - Modelos e Aspectos Gerais de Ventiladores.
Tópicos da Aula Complementar - Ventiladores; - Ventiladores Axiais; - Ventiladores Centrífugos; - Dados necessários para a seleção correta de um ventilador; - Modelos e Aspectos Gerais de Ventiladores.
Geradoras de Vácuo Série WACV
 Válvulas Geradoras de Vácuo (Alto vácuo / sem interruptor) As geradoras de vácuo da série WACV são elementos utilizados para se obter vácuo utilizando-se apenas o ar comprimido como fluido motor. As geradoras
Válvulas Geradoras de Vácuo (Alto vácuo / sem interruptor) As geradoras de vácuo da série WACV são elementos utilizados para se obter vácuo utilizando-se apenas o ar comprimido como fluido motor. As geradoras
Como funciona o Reed-Switches (MEC089)
") Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
CORREIA TRANSPORTADORA FACULDADE CAMPO REAL ENGENHARIA DE PRODUÇÃO 4º SEMESTRE
 CORREIA TRANSPORTADORA FACULDADE CAMPO REAL ENGENHARIA DE PRODUÇÃO 4º SEMESTRE ACADÊMICOS: ANDERSON GOMES EVERSON SCHWAB JOSÉ OSMAR GERSON NESTOR DE SOUZA Dados Históricos Data do século 17, utilizadas
CORREIA TRANSPORTADORA FACULDADE CAMPO REAL ENGENHARIA DE PRODUÇÃO 4º SEMESTRE ACADÊMICOS: ANDERSON GOMES EVERSON SCHWAB JOSÉ OSMAR GERSON NESTOR DE SOUZA Dados Históricos Data do século 17, utilizadas
Manual do instalador Box Input Rev. 0.01.000. Figura 01 Apresentação do Box Input.
 Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
FAIRBANKS NIJHUIS BOMBAS VERTICAIS TIPO TURBINA PARA BOMBEAMENTO DE LÍQUIDOS COM SÓLIDOS (VTSH ) www.fairbanksnijhuis.com
 www.fairbanksnijhuis.com") FAIRBANKS NIJHUIS BOMBAS VERTICAIS TIPO TURBINA PARA BOMBEAMENTO DE LÍQUIDOS COM SÓLIDOS (VTSH ) www.fairbanksnijhuis.com FAIRBANKS NIJHUIS Introdução Estações de bombeamento sem acompanhamento exigem
FAIRBANKS NIJHUIS BOMBAS VERTICAIS TIPO TURBINA PARA BOMBEAMENTO DE LÍQUIDOS COM SÓLIDOS (VTSH ) www.fairbanksnijhuis.com FAIRBANKS NIJHUIS Introdução Estações de bombeamento sem acompanhamento exigem
CONHECIMENTOS TÉCNICOS DE AERONAVES
 CONHECIMENTOS TÉCNICOS DE AERONAVES MÓDULO 2 Aula 4 Professor: Ricardo Rizzo MAGNETISMO É uma propriedade muito conhecida dos imãs, de atrair o ferro. Um imã possui dois pólos magnéticos denominados norte
CONHECIMENTOS TÉCNICOS DE AERONAVES MÓDULO 2 Aula 4 Professor: Ricardo Rizzo MAGNETISMO É uma propriedade muito conhecida dos imãs, de atrair o ferro. Um imã possui dois pólos magnéticos denominados norte
Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006. PdP. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
Elementos de Transmissão Correias
 Elementos de Transmissão Correias Prof. João Paulo Barbosa, M.Sc. Transmissão por polias e correias Transmissão por polias e correias As polias são peças cilíndricas, movimentadas pela rotação do eixo
Elementos de Transmissão Correias Prof. João Paulo Barbosa, M.Sc. Transmissão por polias e correias Transmissão por polias e correias As polias são peças cilíndricas, movimentadas pela rotação do eixo
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSMISSAO E TELEMETRIA
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSMISSAO E TELEMETRIA Introdução Frequentemente, o instrumento indicador, controlador, registrador, etc. e instalado a uma distancia considerável do ponto de medição.
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSMISSAO E TELEMETRIA Introdução Frequentemente, o instrumento indicador, controlador, registrador, etc. e instalado a uma distancia considerável do ponto de medição.
Barramento Elétrico Blindado KSL70
 Barramento Elétrico Blindado KSL70 PG: 2 / 19 ÍNDICE PÁG. 1.0 DADOS TÉCNICOS 03 2.0 - MÓDULO 04 3.0 SUSPENSÃO DESLIZANTE 05 4.0 TRAVESSA DE SUSTENTAÇÃO 06 5.0 EMENDA DOS CONDUTORES E DOS MÓDULOS 07 6.0
Barramento Elétrico Blindado KSL70 PG: 2 / 19 ÍNDICE PÁG. 1.0 DADOS TÉCNICOS 03 2.0 - MÓDULO 04 3.0 SUSPENSÃO DESLIZANTE 05 4.0 TRAVESSA DE SUSTENTAÇÃO 06 5.0 EMENDA DOS CONDUTORES E DOS MÓDULOS 07 6.0
www.keelautomacao.com.br Linha KSDX Solução em processamento CNC
 Linha KSDX Solução em processamento CNC Automatize a produção de sua empresa Instalada em Tubarão, SC, a KEEL atua na fabricação de equipamentos para Corte, Solda e Sistemas (CNC). Fundada em 2002, a empresa
Linha KSDX Solução em processamento CNC Automatize a produção de sua empresa Instalada em Tubarão, SC, a KEEL atua na fabricação de equipamentos para Corte, Solda e Sistemas (CNC). Fundada em 2002, a empresa