Armando Jorge Miranda de Sousa
|
|
|
- Rodrigo Estrela Lancastre
- 5 Há anos
- Visualizações:
Transcrição
1 Armando Jorge Miranda de Sousa
2 Objectivos adquirir capacidades de aplicação de controlo difuso e neurodifuso em processos industriais, com características de não linearidade e de incerteza; equacionar a sua aplicação nos domínios da supervisão, da detecção de falhas e do diagnóstico; projectar sistemas de controlo e de análise com base nos novos conceitos aprendidos; contactar e praticar com algumas das ferramentas de projecto e de análise mais comuns.
3 Programa Introdução aos conjuntos difusos e à lógica difusa (Fuzzy Logic). Modelos difusos, sistemas difusos. Controlo baseado em lógica difusa. Incerteza e não linearidade. Projecto de controladores simples. Sistemas neuro-difusos. Sistemas MIMO. Falhas e diagnóstico. Métodos de detecção baseados em lógica difusa. Aplicações de sistemas baseados em lógica difusa. Análise de exemplos.
, Timothy J Ross Wiley, 2004 ISBN: 0-470-86075-8")
4 Fuzzy Logic with Engineering applications (2nd Ed.), Timothy J Ross Wiley, 2004 ISBN:
5 Palavras Chave Engenharia de processos > Controlo de processos Engenharia de controlo > Redes de controlo Simulação em engenharia Engenharia de sistemas > Teoria de sistemas Engenharia de projecto Tecnologia de sistemas > Analise de sistemas e desenvolvimento de modelos Engenharia de controlo > Automação
6 Probabilidades Fuzzy Difuso = Fuzzy Cristalino = Crespo = Crisp Fuzzy Logic = Lógica Imprecisa ou Difusa Expert System = Sistema Pericial Neural Network = Rede Neuronal Genetic Algorithm = Algoritmo Genético Sliding Mode = Modo de escorregamento
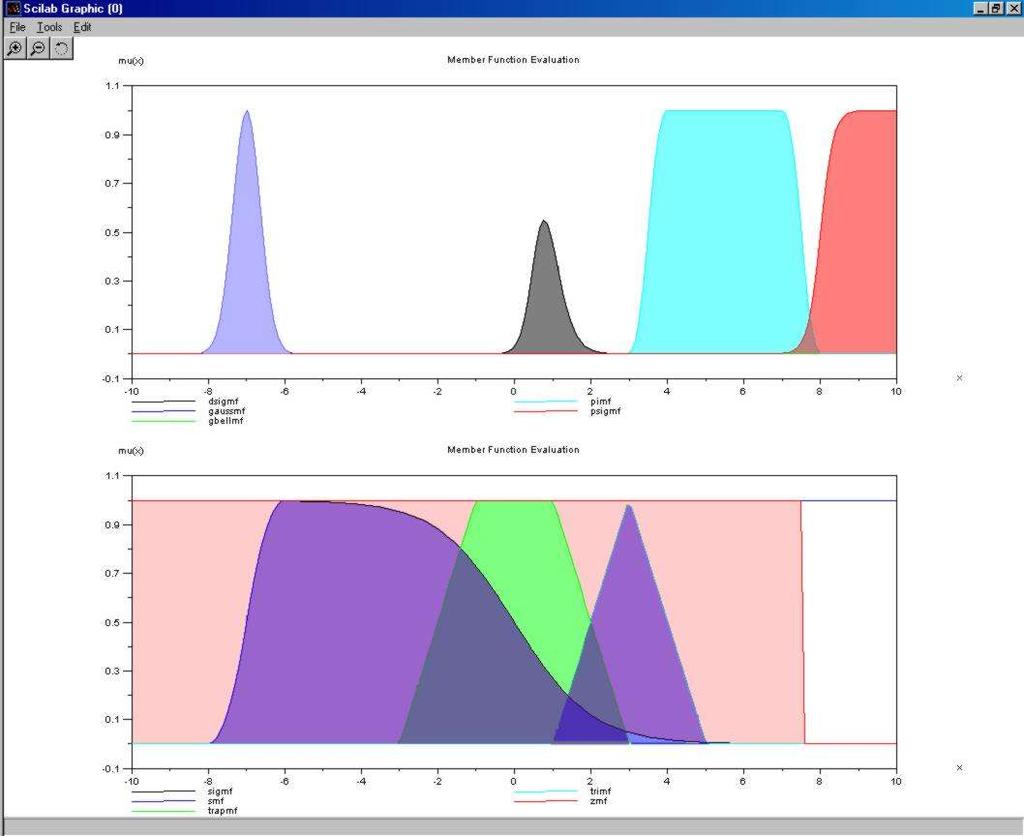
7 Métodos de Ensino A primeira parte da cadeira tem ênfase teórica. Seguir-se-à um Mini-Teste. A segunda fase da cadeira será primordialmente prática. Principalmente ao controlo de Kits fornecidos aos alunos. A principal ferramenta informática a utilizar será o software livre Scilab ( [Matlab, Fuzzy-Tech e SieFuzzy, Delphi, etc...]
8 Classificação Final CF=Classificação Final TC=Trabalho(s) de Casa MT=Mini Teste TP=Trabalho Prático CF=0.1*TC+0.2*MT+0.35*TP+0.35*EF Falta justificada ao MT: CF=0.1*TC+0.45*TP+0.45*EF TE+DA: CF=0.5*TP+0.5*EF
9 Trabalhos SBLD 2004/5 Os objectivos dos trabalhos práticos são apresentados de forma elementar Há diferentes objectivos que envolvem quantidades muito diferentes de trabalho Uma lista de objectivos mais concretos serão apresentados depois de conhecer o número de pessoas que se constituem em grupo para determinado trabalho Obs:nível de desembaraço faz parte da avaliação Sugere-se grupos de 2 pessoas...
10 Equipamento disponível para trabalho com kits Microcontroladores (Atmel, etc) 2 Placas aquisição de dados (NI-PCI-6024E 8 AI + 2 AO) 4 Placas aquisição barramento ISA PCI-20428W 4 Autómatos Schneider com E/S analógicas, compilador de C (biblioteca Fuzzy?)
11 Trabalhos práticos sem kits de hardware: Desenvolvimento de software para controlo Hierárquico Difuso (C/Delphi/Kylix/Outro?) Desenvolvimento ( porte ) de biblioteca de software Neuro/Genético/Difuso para (C/Delphi/Kylix/Outro?) Fuzzy Data Mining Suporte a pesquisas Fuzzy Logic para Bases de Dados (C/Embedded SQL/Outro?) Simulação 2D de condução de carro (manobra de estacionamento?) (SciLab/C/Delphi/Kylix/Outro?)
12 Kits sugeridos (alguns não prontos... J ) 1. Localização 2 D Touch Screen + 3 servos (mecânica concluída) 2. Localização linear push pull electromagnético 2 electroíman + potenciómetro (mecânica concluída) 3. Localização linear pull electromagnético+gravidade (electroíman + potenciómetro) (mecânica muito fácil) 4. Localização linear levitação de bola ping pong por pressão de ar numa coluna vertical (mecânica não concluída)
13 5. Localização linear posicionar bola ping pong por pressão de ar numa calha inclinada (mecânica quase concluída, funcionou o ano passado) 6. Localização linear calha inclinada, inclinação controlada através de servo (mecânica concluída) 7.Localização linear calha inclinada, inclinação controlada através de motor (pode partilhar mecânica com anterior e seguinte) 8.Localização linear calha inclinada, inclinação controlada através de motor de passo (stepper) linear (pode partilhar mecânica com 2 anteriores)
14 9.Temperatura simulador de forno com 2 lâmpadas e 2 ventiladores (mecânicamente fácil mas nada feita caixa com 2 sensores de temperatura e 2 ventiladores) 10.Temperatura forno triplo com ventilador (pronto, utilizado anteriormente noutras cadeiras) 11.Levitador por pressão de ar ventilador 220V + triac + pena + sensor (nada feito M ) 12.Pêndulo Invertido (mecânica complicada M alguma coisa feita)
15 Função Característica Conjunto convencional, cristalino: ={ 0 se x A } A 1 se x A Função Pertença Conjunto difuso, Fuzzy Set: A ~ [0,1]
16
17

18

19
20 Formulas: 1- Alto 1- Baixo MIN (Alto; Baixo) MAX (Alto; Baixo) MIN (NaoAlto; NaoBaixo) MAX (NaoAlto; NaoBaixo) Altura Alto Baixo NaoAlto NaoBaixo Baixo Baixo Não Baixo Alto E Alto OU Não Alto E Não Alto Ou Não Baixo


21 Função Pertença (Conj. Difusos) Classificações difusas de altura Alto Baixo NaoAlto NaoBaixo Alto E Baixo Alto OU Baixo Não Alto E Não Baixo Não Alto Ou Não Baixo Alturas (m)
Servo sistema para perturbação controlada do equilíbrio postural
 Servo sistema para perturbação controlada do equilíbrio postural Dissertação de Mestrado João Filipe Torres Valente Universidade de Aveiro Departamento de Engenharia Mecânica Orientador Prof. Dr. Vítor
Servo sistema para perturbação controlada do equilíbrio postural Dissertação de Mestrado João Filipe Torres Valente Universidade de Aveiro Departamento de Engenharia Mecânica Orientador Prof. Dr. Vítor
RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO
 ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO A12.1. Considerações Iniciais Inicialmente, é importante destacar que a Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia
ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO A12.1. Considerações Iniciais Inicialmente, é importante destacar que a Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia
Automação Inteligente
 Curso de Graduação em Engenharia Elétrica Universidade Federal da Paraíba Período 2016-2 Automação Inteligente Prof. Juan Moises Mauricio Villanueva jmauricio@cear.ufpb.br www.cear.ufpb.br/juan Informações
Curso de Graduação em Engenharia Elétrica Universidade Federal da Paraíba Período 2016-2 Automação Inteligente Prof. Juan Moises Mauricio Villanueva jmauricio@cear.ufpb.br www.cear.ufpb.br/juan Informações
CURSO DE GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO MATRIZ CURRICULAR MATUTINO Fase N.
 CURSO DE GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO MATRIZ CURRICULAR MATUTINO Fase N. Ordem Código COMPONENTE CURRICULAR Créditos Horas Prérequisitos 01 Introdução à informática 04 60 02 Matemática instrumental
CURSO DE GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO MATRIZ CURRICULAR MATUTINO Fase N. Ordem Código COMPONENTE CURRICULAR Créditos Horas Prérequisitos 01 Introdução à informática 04 60 02 Matemática instrumental
Natureza - OBRIGTEÓRICA
 1 de 5 01 CON101 - Algorítmos e Programação - Ativa desde: CON102 - Cálculo I - Ativa desde: 16/11/2007 CON103 - Comunicação e Produção Técnico-Científica - Ativa desde: 16/11/2007 CON104 - Expressão Gráfica
1 de 5 01 CON101 - Algorítmos e Programação - Ativa desde: CON102 - Cálculo I - Ativa desde: 16/11/2007 CON103 - Comunicação e Produção Técnico-Científica - Ativa desde: 16/11/2007 CON104 - Expressão Gráfica
SINAIS E SISTEMAS MECATRÓNICOS
 SINAIS E SISTEMAS MECATRÓNICOS Laboratório #4 1 : Projecto, implementação e validação da cadeia de actuação e medida Mestrado Integrado em Engenharia Mecânica Novembro 2011 ou Dezembro 2011 Realizar na
SINAIS E SISTEMAS MECATRÓNICOS Laboratório #4 1 : Projecto, implementação e validação da cadeia de actuação e medida Mestrado Integrado em Engenharia Mecânica Novembro 2011 ou Dezembro 2011 Realizar na
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
Redes para Automação Industrial. Luiz Affonso Guedes 2006
 Redes para Automação Industrial Luiz Affonso Guedes affonso@dca.ufrn.br 2006 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
Redes para Automação Industrial Luiz Affonso Guedes affonso@dca.ufrn.br 2006 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
MATRIZ CURRICULAR ENGENHARIA DE CONTROLE E AUTOMAÇÃO - IFES - CAMPUS SERRA
 Página: 1 MATRIZ CURRICULAR ENGENHARIA DE CONTROLE E AUTOMAÇÃO - IFES - CAMPUS SERRA Carga Horária Total = 3645 h (Teórica = 2640 h, Laboratório = 1005 h). Núcleos: Básico, Profissionalizante, Específico.
Página: 1 MATRIZ CURRICULAR ENGENHARIA DE CONTROLE E AUTOMAÇÃO - IFES - CAMPUS SERRA Carga Horária Total = 3645 h (Teórica = 2640 h, Laboratório = 1005 h). Núcleos: Básico, Profissionalizante, Específico.
Introdução à Automação Industrial
 Faculdade Fucapi Pós-graduação em Engenharia de Automação Industrial Introdução à Automação Industrial Parte 5, M.Sc. Doutorando em Informática (UFAM) Mestre em Engenharia Elétrica (UFAM) Engenheiro de
Faculdade Fucapi Pós-graduação em Engenharia de Automação Industrial Introdução à Automação Industrial Parte 5, M.Sc. Doutorando em Informática (UFAM) Mestre em Engenharia Elétrica (UFAM) Engenheiro de
Reconhecimento das cores do MSX por Lógica Fuzzy
 Reconhecimento das cores do MSX por Lógica Fuzzy Resumo O objetivo deste artigo é demonstrar como é possível reconhecer as cores nativas do MSX 1 a partir de imagens de 24 bits do PC. 1- Introdução A redução
Reconhecimento das cores do MSX por Lógica Fuzzy Resumo O objetivo deste artigo é demonstrar como é possível reconhecer as cores nativas do MSX 1 a partir de imagens de 24 bits do PC. 1- Introdução A redução
Ementário das disciplinas do curso de Engenharia da Computação. - Núcleo Básico -
 Ementário das disciplinas do curso de Engenharia da Computação Currículo 6 Criado pelo CDI em 30/05/2016 - Núcleo Básico - NB 019 - Cálculo I CH Teórica 160 CH Prática 00 CH Total 160 cr 8 Funções. Limites.
Ementário das disciplinas do curso de Engenharia da Computação Currículo 6 Criado pelo CDI em 30/05/2016 - Núcleo Básico - NB 019 - Cálculo I CH Teórica 160 CH Prática 00 CH Total 160 cr 8 Funções. Limites.
Controlador de Lógica Nebulosa para implementação em robôs inteligentes utilizando Arduino
 Controlador de Lógica Nebulosa para implementação em robôs inteligentes utilizando Arduino Mário Alberto Cecchi Raduan [UFRJ/PIBIC - Ago. 2011 a Jul. 2012] Orientador: Adriano Joaquim de Oliveira Cruz,
Controlador de Lógica Nebulosa para implementação em robôs inteligentes utilizando Arduino Mário Alberto Cecchi Raduan [UFRJ/PIBIC - Ago. 2011 a Jul. 2012] Orientador: Adriano Joaquim de Oliveira Cruz,
TECNOLOGIA EDUCACIONAL
 TECNOLOGIA EDUCACIONAL CONJUNTO PARA ESTUDO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS E IHM Características Gerais Composto por hardware, software e sistema de aprendizagem tecnológica de sistemas automatizados
TECNOLOGIA EDUCACIONAL CONJUNTO PARA ESTUDO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS E IHM Características Gerais Composto por hardware, software e sistema de aprendizagem tecnológica de sistemas automatizados
!!Definição conservativa (hidráulica) e da engenharia do controlo. !!Necessidade do controlo
 e da engenharia do controlo. !!Necessidade do controlo") !!Definição conservativa (hidráulica) e da engenharia do controlo!!necessidade do controlo!! Dificuldade (canal versus conduta em pressão) propagação das perturbações !!Variáveis controladas alturas de
!!Definição conservativa (hidráulica) e da engenharia do controlo!!necessidade do controlo!! Dificuldade (canal versus conduta em pressão) propagação das perturbações !!Variáveis controladas alturas de
ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO DE ENGENHARIA ELETRÔNICA E DE TELECOMUNICAÇÕES-UFU
 ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO DE ENGENHARIA ELETRÔNICA E DE TELECOMUNICAÇÕES-UFU O Certificado em Eletrônica e de Telecomunicações foi implantado desde 2007. Não haverá
ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO DE ENGENHARIA ELETRÔNICA E DE TELECOMUNICAÇÕES-UFU O Certificado em Eletrônica e de Telecomunicações foi implantado desde 2007. Não haverá
TÍTULO: CONTROLADOR DE PROCESSOS E DISPOSITIVOS COM REDUNDÂNCIA DE OPERAÇÃO POR PROTOCOLO DE COMUNICAÇÃO I2C
 TÍTULO: CONTROLADOR DE PROCESSOS E DISPOSITIVOS COM REDUNDÂNCIA DE OPERAÇÃO POR PROTOCOLO DE COMUNICAÇÃO I2C CATEGORIA: EM ANDAMENTO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES):
TÍTULO: CONTROLADOR DE PROCESSOS E DISPOSITIVOS COM REDUNDÂNCIA DE OPERAÇÃO POR PROTOCOLO DE COMUNICAÇÃO I2C CATEGORIA: EM ANDAMENTO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES):
Alexandre Bernardino, Margarida Silveira, J. Miranda Lemos
 Mestrado Integrado em Engenharia Aeroespacial 2009/2010 - Semestre de Inverno Controlo Óptimo e Adaptativo TRABALHO DE LABORATÓRIO Identificação e Controlo Digital do Sistema de Posicionamento de uma Barra
Mestrado Integrado em Engenharia Aeroespacial 2009/2010 - Semestre de Inverno Controlo Óptimo e Adaptativo TRABALHO DE LABORATÓRIO Identificação e Controlo Digital do Sistema de Posicionamento de uma Barra
Capítulo 9. Projeto por Intermédio do Lugar das Raízes (Continuação)
") Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
MATRIZ CURRICULAR BACHARELADO EM ENGENHARIA DA COMPUTAÇÃO. 1º Período
 MATRIZ CURRICULAR BACHARELADO EM ENGENHARIA DA COMPUTAÇÃO 1º Período Código Disciplina CHT 1 CHP 2 CH Total Pré-requisitos Dados I 40 40 80 - Cálculo I 80-80 - Fundamentos da Computação 40-40 - Fundamentos
MATRIZ CURRICULAR BACHARELADO EM ENGENHARIA DA COMPUTAÇÃO 1º Período Código Disciplina CHT 1 CHP 2 CH Total Pré-requisitos Dados I 40 40 80 - Cálculo I 80-80 - Fundamentos da Computação 40-40 - Fundamentos
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA
 CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
CURSO DE PÓS-GRADUAÇÃO LATO SENSU AUTOMAÇÃO INDUSTRIAL E SISTEMAS DE CONTROLE - MECATRÔNICA Motivação O setor industrial experimentou nas últimas duas décadas um extraordinário avanço devido ao aumento
Sistema Experimental. Figura 40: Robô original de onde foram aproveitadas a base da estrutura de alumínio, motores, rodas e eletrônica de potência.
 73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
27/8/2011. Princípios, Conceitos e Metodologia de Gestão 2o semestre de 2011 Professores: Alexandre Mota / Lia Mota Agosto/2011
 Tomada de Decisão e Regras Nebulosas Princípios, Conceitos e Metodologia de Gestão 2o semestre de 2011 Professores: Alexandre Mota / Lia Mota Agosto/2011 Representação Matemática de Incertezas Padrões
Tomada de Decisão e Regras Nebulosas Princípios, Conceitos e Metodologia de Gestão 2o semestre de 2011 Professores: Alexandre Mota / Lia Mota Agosto/2011 Representação Matemática de Incertezas Padrões
Aula 1 Apresentação e Conceitos Iniciais. Wellington Cássio Faria fb.com/wellingtoncf
 Aula 1 Apresentação e Conceitos Iniciais Formação: Professor: Curso técnico Médio (2o grau) Técnico em Eletrônica Industrial, CEP - Centro de Educação Profissional Tancredo Neves (julho/2010) - concluída.
Aula 1 Apresentação e Conceitos Iniciais Formação: Professor: Curso técnico Médio (2o grau) Técnico em Eletrônica Industrial, CEP - Centro de Educação Profissional Tancredo Neves (julho/2010) - concluída.
CONTROLE POR ESTRUTURA VARIÁVEL DE UM SISTEMA PÊNDULO INVERTIDO SIMPLES
 CONTROLE POR ESTRUTURA VARIÁVEL DE UM SISTEMA PÊNDULO INVERTIDO SIMPLES Autores : Renan Junior BALAN 1, Felipe JUNG 1, Marina PADILHA 1, Otávio Rafael de SOUZA 1, Rafael Garlet de OLIVEIRA 2, Antônio RIBAS
CONTROLE POR ESTRUTURA VARIÁVEL DE UM SISTEMA PÊNDULO INVERTIDO SIMPLES Autores : Renan Junior BALAN 1, Felipe JUNG 1, Marina PADILHA 1, Otávio Rafael de SOUZA 1, Rafael Garlet de OLIVEIRA 2, Antônio RIBAS
IF-705 Automação Inteligente Sistemas de Controle - Fundamentos
 IF-705 Automação Inteligente Sistemas de Controle - Fundamentos Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br
IF-705 Automação Inteligente Sistemas de Controle - Fundamentos Aluizio Fausto Ribeiro Araújo Universidade Federal de Pernambuco Centro de Informática - CIn Departamento de Sistemas da Computação aluizioa@cin.ufpe.br
Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Twin Rotor MIMO System (TRMS)
") Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Twin Rotor MIMO System (TRMS) 1 Rotor Duplo (TRMS - Twin Rotor MIMO System) A unidade TRMS da Feedback
Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Twin Rotor MIMO System (TRMS) 1 Rotor Duplo (TRMS - Twin Rotor MIMO System) A unidade TRMS da Feedback
ANÁLISE QUANTITATIVA DE UM PÊNDULO INVERTIDO CONTROLADO POR PID E LÓGICA FUZZY
 ANÁLISE QUANTITATIVA DE UM PÊNDULO INVERTIDO CONTROLADO POR PID E LÓGICA FUZZY Adryano Fernandes Resende 1, Jackson Gonçalves Ernesto 2, Fábio Augusto Gentilin³ 1,2 Acadêmicos do Curso de Engenharia de
ANÁLISE QUANTITATIVA DE UM PÊNDULO INVERTIDO CONTROLADO POR PID E LÓGICA FUZZY Adryano Fernandes Resende 1, Jackson Gonçalves Ernesto 2, Fábio Augusto Gentilin³ 1,2 Acadêmicos do Curso de Engenharia de
Grade Curricular do Curso de Graduação em Engenharia de Computação
 Grade Curricular do Curso de Graduação em Engenharia de Computação Currículo 6 Aprovado pelo CDI em 30/05/16 - Carga Horária - Carga Horária Núcleo Básico 1.280h Carga Horária Núcleo Profissionalizante
Grade Curricular do Curso de Graduação em Engenharia de Computação Currículo 6 Aprovado pelo CDI em 30/05/16 - Carga Horária - Carga Horária Núcleo Básico 1.280h Carga Horária Núcleo Profissionalizante
Sistemas difusos (Fuzzy Systems)
") Sistemas difusos (Fuzzy Systems) Victor Lobo Mestrado em Estatística e Gestão de Informação Ideia geral Conjunto das pessoas altas h Lógica clássica Sim ou Não: ou é, ou não é Probabilidades Sim, com uma
Sistemas difusos (Fuzzy Systems) Victor Lobo Mestrado em Estatística e Gestão de Informação Ideia geral Conjunto das pessoas altas h Lógica clássica Sim ou Não: ou é, ou não é Probabilidades Sim, com uma
PROGRAMA DE DISCIPLINA
 ASSOCIAÇÃO EDUCACIONAL DOM BOSCO Fundada em 21 de dezembro de 1964 MANTENEDORA DAS FACULDADES DE CIÊNCIAS ECONÔMICAS, ADMINISTRATIVAS, COMPUTAÇÃO, FILOSOFIA, CIÊNCIAS E LETRAS DOM BOSCO, FACULDADE DE ENGENHARIA
ASSOCIAÇÃO EDUCACIONAL DOM BOSCO Fundada em 21 de dezembro de 1964 MANTENEDORA DAS FACULDADES DE CIÊNCIAS ECONÔMICAS, ADMINISTRATIVAS, COMPUTAÇÃO, FILOSOFIA, CIÊNCIAS E LETRAS DOM BOSCO, FACULDADE DE ENGENHARIA
Aluno do curso de graduação em Engenharia Mecânica da UNIJUÍ, bolsista PIBIC/CNPq, 3
 INTEGRAÇÃO ARDUINO - SIMULINK APLICADA A SENSORES PARA SISTEMAS MECATRÔNICOS 1 ARDUINO - SIMULINK INTEGRATION APPLIED TO SENSORS FOR MECHATRONICS SYSTEMS Giovani Prates Bisso Dambroz 2, Matias Alles Hubert
INTEGRAÇÃO ARDUINO - SIMULINK APLICADA A SENSORES PARA SISTEMAS MECATRÔNICOS 1 ARDUINO - SIMULINK INTEGRATION APPLIED TO SENSORS FOR MECHATRONICS SYSTEMS Giovani Prates Bisso Dambroz 2, Matias Alles Hubert
Processo térmico multivariável apropriado para controlo por computador
 Processo térmico multivariável apropriado para controlo por computador Manual de utilização Faculdade de Engenharia de Universidade do Porto 2002 António Paulo Gomes Mendes Moreira Paulo Gomes da Costa
Processo térmico multivariável apropriado para controlo por computador Manual de utilização Faculdade de Engenharia de Universidade do Porto 2002 António Paulo Gomes Mendes Moreira Paulo Gomes da Costa
Fuzzy Logic - Lógica Difusa - Introdução Muito Rápida
 Fuzzy Logic - Lógica Difusa - Introdução Muito Rápida por Armando Jorge Sousa - 11 Março de 2005 A Fuzzy Logic, Lógica Difusa também chamada de Lógica Imprecisa confere graus intermédios de verdade para
Fuzzy Logic - Lógica Difusa - Introdução Muito Rápida por Armando Jorge Sousa - 11 Março de 2005 A Fuzzy Logic, Lógica Difusa também chamada de Lógica Imprecisa confere graus intermédios de verdade para
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA. SUBÁREA: Engenharias
 TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
TÍTULO: TESTE DE CONTROLADOR PARA UM ROBÔ DE EQUILÍBRIO DINÂMICO CATEGORIA: CONCLUÍDO ÁREA: CIÊNCIAS EXATAS E DA TERRA SUBÁREA: Engenharias INSTITUIÇÃO(ÕES): CENTRO UNIVERSITÁRIO DO NORTE PAULISTA - UNORP
Redes para Automação Industrial. Luiz Affonso Guedes DCA-CT-UFRN
 Redes para Automação Industrial Luiz Affonso Guedes DCA-CT-UFRN 2003.1 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
Redes para Automação Industrial Luiz Affonso Guedes DCA-CT-UFRN 2003.1 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
2 Descrição da Unidade de Levitação Magnética e Sistema de Controle
 Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Levitação Eletromagnética 1 Levitação Eletromagnética O módulo de Levitação Magnética da Feedback
Universidade Federal de Minas Gerais Laboratório de Controle e Automação I Prof. Patrícia N. Pena - DELT Levitação Eletromagnética 1 Levitação Eletromagnética O módulo de Levitação Magnética da Feedback
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
MR Simulação. Simulação de Processos em Engenharia dos Materiais
 MR 0720 - Simulação Simulação de Processos em Engenharia dos Materiais MR0720 Simulação CRITÉRIO DE APROVEITAMENTO M = Prova única no final do semestre. Prova prática com consulta, realizada com o auxílio
MR 0720 - Simulação Simulação de Processos em Engenharia dos Materiais MR0720 Simulação CRITÉRIO DE APROVEITAMENTO M = Prova única no final do semestre. Prova prática com consulta, realizada com o auxílio
CAPÍTULO 1. 1) A "Domótica" é uma filosofia aplicada ao projeto de redes para automação de residências, escritórios e comércio em geral.
 A Domótica é uma filosofia aplicada ao projeto de redes para automação de residências, escritórios e comércio em geral.") 1) Qual é a definição de domótica? INSTALAÇÕES ELÉTRICAS INTELIGENTES CAPÍTULO 1 1) A "Domótica" é uma filosofia aplicada ao projeto de redes para automação de residências, escritórios e comércio em geral.
1) Qual é a definição de domótica? INSTALAÇÕES ELÉTRICAS INTELIGENTES CAPÍTULO 1 1) A "Domótica" é uma filosofia aplicada ao projeto de redes para automação de residências, escritórios e comércio em geral.
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 29/08/2011 Currículo de Cursos Hora: 16:19:21
 UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 29/08/2011 Currículo de Cursos Hora: 16:19:21 Curso: Engenharia de Computacao Nível: Ensino Superior Grau Conferido: Engenheiro de Computação Turno: Diurno
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 29/08/2011 Currículo de Cursos Hora: 16:19:21 Curso: Engenharia de Computacao Nível: Ensino Superior Grau Conferido: Engenheiro de Computação Turno: Diurno
Introdução ao LabVIEW para Robótica
 Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
Introdução ao LabVIEW para Robótica 2 O que faremos? LabVIEW NI Robotics Starter Kit Estudo de Caso Exercicios 3 Ambiente Gráfico de Programação LabVIEW Fácil. Poderoso. Aberto. Faça medições de modo FÁCIL
ATUALIZAÇÃO DE MATRIZES CURRICULARES CURSO DE ENGENHARIA DE COMPUTAÇÃO
 ATUALIZAÇÃO DE MATRIZES CURRICULARES CURSO DE ENGENHARIA DE COMPUTAÇÃO Prezado estudante, Em 2018.1, os cursos da UNIFACS passaram por uma atualização de matrizes curriculares. As informações sobre os
ATUALIZAÇÃO DE MATRIZES CURRICULARES CURSO DE ENGENHARIA DE COMPUTAÇÃO Prezado estudante, Em 2018.1, os cursos da UNIFACS passaram por uma atualização de matrizes curriculares. As informações sobre os
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 23/09/2015 Currículo de Cursos Hora: 07:48:26
 UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 23/09/2015 Currículo de Cursos Hora: 07:48:26 Curso: Engenharia da Computação Nível: Ensino Superior Grau Conferido: Engenheiro de Computação Turno: Integral
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 23/09/2015 Currículo de Cursos Hora: 07:48:26 Curso: Engenharia da Computação Nível: Ensino Superior Grau Conferido: Engenheiro de Computação Turno: Integral
Inteligência Artificial
 DSC/CCT/UFC Universidade Federal de Campina Grande Departamento de Sistemas e Computação Pós-Graduação em Ciência da Computação Inteligência Artificial Representação do Conhecimento (Lógica Fuzzy) Prof.
DSC/CCT/UFC Universidade Federal de Campina Grande Departamento de Sistemas e Computação Pós-Graduação em Ciência da Computação Inteligência Artificial Representação do Conhecimento (Lógica Fuzzy) Prof.
TP034-Tópicos Especiais de Pesquisa Operacional I
 TP34-Tópicos Especiais de Pesquisa Operacional I (Conjuntos Difusos Princípio da Extensão) Prof. Volmir Wilhelm Curitiba, Paraná, Brasil Gráficos difusos Um gráfico difuso descreve um mapeamento funcional
TP34-Tópicos Especiais de Pesquisa Operacional I (Conjuntos Difusos Princípio da Extensão) Prof. Volmir Wilhelm Curitiba, Paraná, Brasil Gráficos difusos Um gráfico difuso descreve um mapeamento funcional
AVALIAÇÃO DA APLICAÇÃO DE TÉCNICAS DE LÓGICA FUZZY NO CONTROLO DE MÁQUINAS ELÉCTRICAS. Jaime Fonseca João Afonso Júlio Martins Carlos Couto
 AVALIAÇÃO DA APLICAÇÃO DE TÉCNICAS DE LÓGICA FUZZY NO CONTROLO DE MÁQUINAS ELÉCTRICAS Jaime Fonseca João Afonso Júlio Martins Carlos Couto Departamento de Electrónica Industrial Universidade do Minho 47
AVALIAÇÃO DA APLICAÇÃO DE TÉCNICAS DE LÓGICA FUZZY NO CONTROLO DE MÁQUINAS ELÉCTRICAS Jaime Fonseca João Afonso Júlio Martins Carlos Couto Departamento de Electrónica Industrial Universidade do Minho 47
Indústria 4.0: Como monitorar e
 Indústria 4.0: Como monitorar e manter a performance de um sistema experto. Aplicação: Moagem de bolas Karina Assini Oliveira Pilares da Indústria 4.0 Relevância para Atividade Industrial Big Data Analytics
Indústria 4.0: Como monitorar e manter a performance de um sistema experto. Aplicação: Moagem de bolas Karina Assini Oliveira Pilares da Indústria 4.0 Relevância para Atividade Industrial Big Data Analytics
LAB3 Controle nebuloso (VERSÃO PROVISÓRIA)
") LAB3 Controle nebuloso (VERSÃO PROVISÓRIA) 3.1 Objetivo Esta experiência tem por objetivo a familiarição com a técnica de Controle Nebuloso (Fuzzy Control, em inglês). Para isso será contruído um controlador
LAB3 Controle nebuloso (VERSÃO PROVISÓRIA) 3.1 Objetivo Esta experiência tem por objetivo a familiarição com a técnica de Controle Nebuloso (Fuzzy Control, em inglês). Para isso será contruído um controlador
UNIVERSIDADE FEDERAL DO PAMPA Currículo Cursos
 CH Total: 4050 Cred. Total: ideal: 10 mín.: 10 máx.: Situação da Versão.: CORRENTE Ano do Curriculo.: 2010 1 BA010901 - FISICA I 1 BA010902 - LABORATORIO DE FISICA I Obrigatória ATIVA 2 Total: 1 BA011004
CH Total: 4050 Cred. Total: ideal: 10 mín.: 10 máx.: Situação da Versão.: CORRENTE Ano do Curriculo.: 2010 1 BA010901 - FISICA I 1 BA010902 - LABORATORIO DE FISICA I Obrigatória ATIVA 2 Total: 1 BA011004
Alex da Silva Temoteo
 Alex da Silva Temoteo atuou como orientador do trabalho TEORIA DOS GRAFOS NO ENSINO MÉDIO, O PROBLEMA DO CAIXEIRO VIAJANTE E OUTRAS APLICAÇÕES, apresentado no 20º Encontro de Avaliação do Programa Institucional
Alex da Silva Temoteo atuou como orientador do trabalho TEORIA DOS GRAFOS NO ENSINO MÉDIO, O PROBLEMA DO CAIXEIRO VIAJANTE E OUTRAS APLICAÇÕES, apresentado no 20º Encontro de Avaliação do Programa Institucional
Disciplinas isoladas para o 1º semestre de 2018
 Curso: Engenharia de Telecomunicações Disciplinas isoladas para o 1º semestre de 018 Período Sigla P5 EE 01 Disciplina Circuitos Elétricos II créditos Pré e có-requisitos NB 003 - Cálculo III (PRÉ) NP
Curso: Engenharia de Telecomunicações Disciplinas isoladas para o 1º semestre de 018 Período Sigla P5 EE 01 Disciplina Circuitos Elétricos II créditos Pré e có-requisitos NB 003 - Cálculo III (PRÉ) NP
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
Benefícios de um CLP:
 Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
PONTIFÍCIA UNIVERSIDADE CATÓLICA DE MINAS GERAIS Disciplinas em Oferta do 1º semestre de 2019
 1º Período CH Turmas Req. CH Req. Cred. Req(s). Disciplina(s) CÁLCULO I (5292) CIÊNCIAS DO AMBIENTE (5295) DESENHO AUXILIADO POR COMPUTADOR (5287) FILOSOFIA: RAZÃO E MODERNIDADE (529) 68 6512.1.-9 34 6617.1.-6
1º Período CH Turmas Req. CH Req. Cred. Req(s). Disciplina(s) CÁLCULO I (5292) CIÊNCIAS DO AMBIENTE (5295) DESENHO AUXILIADO POR COMPUTADOR (5287) FILOSOFIA: RAZÃO E MODERNIDADE (529) 68 6512.1.-9 34 6617.1.-6
ENGENHARIA DE COMPUTAÇÃO Bacharelado. ANEXO I - Matriz Curricular de Disciplinas- Modelo. NÚCLEO (Res CNE 11/2002) Presencial.
 Presencial.") AXO I Matriz Curricular de Disciplinas Modelo 1º SEMESTRE B.MATTRI.001 Cálculo Diferencial e Integral I B.MATTRI.002 Geometria Analítica B.ENGTRI.003 Desenho Técnico 3 7 2,2 42,7 B.ECPTRI.003 Introdução
AXO I Matriz Curricular de Disciplinas Modelo 1º SEMESTRE B.MATTRI.001 Cálculo Diferencial e Integral I B.MATTRI.002 Geometria Analítica B.ENGTRI.003 Desenho Técnico 3 7 2,2 42,7 B.ECPTRI.003 Introdução
Pré-requisito Coreq Disciplina ECA101 - Expressão Gráfica - Ativa desde: 01/01/2008. Natureza - OBRIGATÓRIA PRÁTICA 36 TEÓRICA 18
 1 de 5 Nível:BACHARELADO Início: 20002 01 - - ECA101 - Expressão Gráfica - Ativa desde: 01/01/2008 TEÓRICA 18 ECA102 - Filosofia - Ativa desde: Natureza - OBRIGATÓRIA ECA103 - Física: Cinemática e Dinâmica
1 de 5 Nível:BACHARELADO Início: 20002 01 - - ECA101 - Expressão Gráfica - Ativa desde: 01/01/2008 TEÓRICA 18 ECA102 - Filosofia - Ativa desde: Natureza - OBRIGATÓRIA ECA103 - Física: Cinemática e Dinâmica
lnteligência Artificial Introdução a Lógica Nebulosa (Fuzzy)
") lnteligência Artificial Introdução a Lógica Nebulosa (Fuzzy) Sumário Introdução Fundamentos Operações básicas Representação do Conhecimento Modelo de Inferência Passos de Projeto de um Sistema Nebuloso
lnteligência Artificial Introdução a Lógica Nebulosa (Fuzzy) Sumário Introdução Fundamentos Operações básicas Representação do Conhecimento Modelo de Inferência Passos de Projeto de um Sistema Nebuloso
Simpósio Brasileiro de Automação Inteligente XI SBAI 2013
 Simpósio Brasileiro de Automação Inteligente XI SBAI 2013 CONTROLE DE TEMPERATURA DE UMA TOCHA DE PLASMA TÉRMICO COM ACOPLAMENTO INDUTIVO UTILIZANDO A PLACA ARDUINO GUSTAVO FERNANDES DE LIMA (Mestrando)
Simpósio Brasileiro de Automação Inteligente XI SBAI 2013 CONTROLE DE TEMPERATURA DE UMA TOCHA DE PLASMA TÉRMICO COM ACOPLAMENTO INDUTIVO UTILIZANDO A PLACA ARDUINO GUSTAVO FERNANDES DE LIMA (Mestrando)
Disciplinas isoladas para o 1º semestre de 2017
 Curso: Engenharia de Telecomunicações Disciplinas isoladas para o 1º semestre de 017 Período Sigla P5 EE 01 Disciplina Circuitos Elétricos II créditos Pré e có-requisitos NB 003 - Cálculo III (PRÉ) EE
Curso: Engenharia de Telecomunicações Disciplinas isoladas para o 1º semestre de 017 Período Sigla P5 EE 01 Disciplina Circuitos Elétricos II créditos Pré e có-requisitos NB 003 - Cálculo III (PRÉ) EE
Controle a Distância de um Barco com Arduino+Bluetooth
 Controle a Distância de um Barco com Arduino+Bluetooth Wagner Y. Nishi [Voluntário PIBIC/UTFPR], Marcio Mendonça [orientador] Coordenação de Engenharia Elétrica Campus Cornélio Procópio Universidade Tecnológica
Controle a Distância de um Barco com Arduino+Bluetooth Wagner Y. Nishi [Voluntário PIBIC/UTFPR], Marcio Mendonça [orientador] Coordenação de Engenharia Elétrica Campus Cornélio Procópio Universidade Tecnológica
Actuação da Direcção do ATLASCAR
 !!! Departamento de Engenharia Mecânica Universidade de Aveiro Projecto em Automação e Robótica Industrial Relatório Final Fevereiro de 2011 Actuação da Direcção do ATLASCAR! Tutoria: David Gameiro Francisco
!!! Departamento de Engenharia Mecânica Universidade de Aveiro Projecto em Automação e Robótica Industrial Relatório Final Fevereiro de 2011 Actuação da Direcção do ATLASCAR! Tutoria: David Gameiro Francisco
PLATAFORMA PARA ESTUDO EM PROGRAMAÇÃO DE MICROCONTROLADORES FAMÍLIA 8051
 PLATAFORMA PARA ESTUDO EM PROGRAMAÇÃO DE MICROCONTROLADORES FAMÍLIA 8051 MODELO: EE0216 DESCRIÇÃO Plataforma de treinamento em microcontroladores família 8051 base em aço carbono e pés de borracha, pintura
PLATAFORMA PARA ESTUDO EM PROGRAMAÇÃO DE MICROCONTROLADORES FAMÍLIA 8051 MODELO: EE0216 DESCRIÇÃO Plataforma de treinamento em microcontroladores família 8051 base em aço carbono e pés de borracha, pintura
RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO
 RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO 1. CATEGORIA ENGENHARIA 1.2 - CAMPOS DE ATUAÇÃO PROFISSIONAL DA MODALIDADE ELÉTRICA 1.2.1 Eletricidade Aplicada e Equipamentos Eletroeletrônicos
RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO 1. CATEGORIA ENGENHARIA 1.2 - CAMPOS DE ATUAÇÃO PROFISSIONAL DA MODALIDADE ELÉTRICA 1.2.1 Eletricidade Aplicada e Equipamentos Eletroeletrônicos
TÍTULO: PROTÓTIPO DE UM ROBÔ PÊNDULO INVERTIDO UTILIZANDO FILTROS DE KALMAN E PID PARA CONTROLE DE SUA ESTABILIDADE: UMA ABORDAGEM DIDÁTICA
 TÍTULO: PROTÓTIPO DE UM ROBÔ PÊNDULO INVERTIDO UTILIZANDO FILTROS DE KALMAN E PID PARA CONTROLE DE SUA ESTABILIDADE: UMA ABORDAGEM DIDÁTICA CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA:
TÍTULO: PROTÓTIPO DE UM ROBÔ PÊNDULO INVERTIDO UTILIZANDO FILTROS DE KALMAN E PID PARA CONTROLE DE SUA ESTABILIDADE: UMA ABORDAGEM DIDÁTICA CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA:
Estudo de alternativas tecnológicas
 Estudo de alternativas tecnológicas Oficinas de Integração 3-2º. Sem. 2011 Prof. Heitor S. Lopes Prof. João A. Fabro Funções do engenheiro Entender o problema para poder determinar os requisitos necessários
Estudo de alternativas tecnológicas Oficinas de Integração 3-2º. Sem. 2011 Prof. Heitor S. Lopes Prof. João A. Fabro Funções do engenheiro Entender o problema para poder determinar os requisitos necessários
Kit didático para controle de velocidade e posição de um motor de corrente contínua
 https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
AULA 1 - INTRODUÇÃO. Prof. Marcio Kimpara
 COMANDOS INDUSTRIAIS AULA 1 - INTRODUÇÃO Prof. Marcio Kimpara UFMS - Universidade Federal de Mato Grosso do Sul FAENG Faculdade de Engenharias, Arquitetura e Urbanismo e Geografia Prof. Marcio Kimpara
COMANDOS INDUSTRIAIS AULA 1 - INTRODUÇÃO Prof. Marcio Kimpara UFMS - Universidade Federal de Mato Grosso do Sul FAENG Faculdade de Engenharias, Arquitetura e Urbanismo e Geografia Prof. Marcio Kimpara
Faculdade SENAI Rio. Infraestrutura Graduação Tecnológica em Automação Industrial
 Faculdade SENAI Rio Infraestrutura Graduação Tecnológica em Automação Industrial Laboratório de Eletrônica Possui kits didáticos de Eletrônica Analógica e Digital e diversos equipamentos tais como: osciloscópios
Faculdade SENAI Rio Infraestrutura Graduação Tecnológica em Automação Industrial Laboratório de Eletrônica Possui kits didáticos de Eletrônica Analógica e Digital e diversos equipamentos tais como: osciloscópios
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Interfaces de E/S
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Interfaces de E/S Heitor Medeiros Florencio Interfaces de Entrada e Saída Interfaces de E/S A seção
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Interfaces de E/S Heitor Medeiros Florencio Interfaces de Entrada e Saída Interfaces de E/S A seção
PROJETO MECATRÔNICO: CADEIRA DE BALANÇO
 PROJETO MECATRÔNICO: CADEIRA DE BALANÇO Mikhail Polonskii Universidade de Passo Fundo, Faculdade de Engenharia e Arquitetura, São José 99001-970 - Passo Fundo RS mailto:polonski@upf.tche.br Resumo. O trabalho
PROJETO MECATRÔNICO: CADEIRA DE BALANÇO Mikhail Polonskii Universidade de Passo Fundo, Faculdade de Engenharia e Arquitetura, São José 99001-970 - Passo Fundo RS mailto:polonski@upf.tche.br Resumo. O trabalho
Modelação, Identificação e Controlo Digital
 Licenciatura em Engenharia Electrotécnica e de Computadores 2003/2004 Semestre de Inverno Modelação, Identificação e Controlo Digital Controlo Digital da Posição de uma Esfera Preparado por Alexandre Bernardino
Licenciatura em Engenharia Electrotécnica e de Computadores 2003/2004 Semestre de Inverno Modelação, Identificação e Controlo Digital Controlo Digital da Posição de uma Esfera Preparado por Alexandre Bernardino
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Introdução. Objectivos
 ROCK IN RIO ESCOLA SOLAR Criatividade e Desenvolvimento Sustentável Introdução Sem a participação activa e concreta das empresas e mesmo de algumas autarquias, somos reféns de uma grande inércia e de falta
ROCK IN RIO ESCOLA SOLAR Criatividade e Desenvolvimento Sustentável Introdução Sem a participação activa e concreta das empresas e mesmo de algumas autarquias, somos reféns de uma grande inércia e de falta
Sintonia de um sistema PID via Algoritmos Genéticos aplicado ao controle de um manipulador robótico em forma de paralelogramo
 Sintonia de um sistema PID via Algoritmos Genéticos aplicado ao controle de um manipulador robótico em forma de paralelogramo Filipe Sacchi ICA: Applied Computational Intelligence Department of Electrical
Sintonia de um sistema PID via Algoritmos Genéticos aplicado ao controle de um manipulador robótico em forma de paralelogramo Filipe Sacchi ICA: Applied Computational Intelligence Department of Electrical
INSTITUTO TECNOLÓGICO DE AERONÁUTICA CENTRO DE REFERÊNCIA EM TURBINAS A GÁS E ENERGIA CENTRO DE REFERÊNCIA EM TURBINAS A GÁS E ENERGIA
 CENTRO DE REFERÊNCIA EM TURBINAS A GÁS E ENERGIA Grupo de Turbinas 2010 OBJETIVOS formar e capacitar recursos humanos para atuar em áreas ligadas a turbinas a gás e energia desenvolver pesquisa em áreas
CENTRO DE REFERÊNCIA EM TURBINAS A GÁS E ENERGIA Grupo de Turbinas 2010 OBJETIVOS formar e capacitar recursos humanos para atuar em áreas ligadas a turbinas a gás e energia desenvolver pesquisa em áreas
Supervisor de Monitoramento e Diagnóstico de Sensores aplicado a um Sistema Experimental
 Supervisor de Monitoramento e Diagnóstico de Sensores aplicado a um Sistema Experimental "Este trabalho se propõe a desenvolver um sistema experimental que englobe todas as funcionalidades de uma planta
Supervisor de Monitoramento e Diagnóstico de Sensores aplicado a um Sistema Experimental "Este trabalho se propõe a desenvolver um sistema experimental que englobe todas as funcionalidades de uma planta
APRESENTAÇÃO A Empresa 3
 Janeiro/207 Índice APRESENTAÇÃO A Empresa 3 KITS DIDÁTICOS Visão Geral 4 Maletas Didáticas de Automação Industrial 6 Maleta Didática de Eletropneumática 9 Maleta Didática de Comandos Elétricos Maleta Didática
Janeiro/207 Índice APRESENTAÇÃO A Empresa 3 KITS DIDÁTICOS Visão Geral 4 Maletas Didáticas de Automação Industrial 6 Maleta Didática de Eletropneumática 9 Maleta Didática de Comandos Elétricos Maleta Didática
Redes Neurais e Sistemas Fuzzy
 Redes Neurais e Sistemas Fuzzy Conceitos Básicos da Lógica Fuzzy. Raciocínio aproximado Raciocínio aproximado é a forma mais conhecida de lógica fuzzy, cobrindo várias regras de inferência cujas premissas
Redes Neurais e Sistemas Fuzzy Conceitos Básicos da Lógica Fuzzy. Raciocínio aproximado Raciocínio aproximado é a forma mais conhecida de lógica fuzzy, cobrindo várias regras de inferência cujas premissas
Instrumentos Analógicos e Digitais
 Instrumentos Analógicos e Digitais Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em
Instrumentos Analógicos e Digitais Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em
Universidade Federal de Roraima Departamento de Matemática Introdução à Ciência da Computação
 Universidade Federal de Roraima Departamento de Matemática Introdução à Ciência da Computação Tema nº1: Entrada e saída de dados Assunto: Elemos básicos sobre Arquitetura de Computadores Conceito de Hardware,
Universidade Federal de Roraima Departamento de Matemática Introdução à Ciência da Computação Tema nº1: Entrada e saída de dados Assunto: Elemos básicos sobre Arquitetura de Computadores Conceito de Hardware,
CLIENTE: Alpes Programação Industrial
 www.alpespi.com CLIENTE: Alpes Programação Industrial PROJETO: APInjet Número do projeto: 01 Revisão: R02 Data: 29/10/2012 qualquer fim, que não o previamente acordado, sem autorização da mesma. 1 SUMÁRIO
www.alpespi.com CLIENTE: Alpes Programação Industrial PROJETO: APInjet Número do projeto: 01 Revisão: R02 Data: 29/10/2012 qualquer fim, que não o previamente acordado, sem autorização da mesma. 1 SUMÁRIO
Guião do trabalho prático TP7
 Mestrado Integrado em Engenharia Electrotécnica e de Computadores Disciplina Automação Ramos Energia e Automação Guião do trabalho prático TP7 Projecto de Porta Automática baseado em Autómato Programável
Mestrado Integrado em Engenharia Electrotécnica e de Computadores Disciplina Automação Ramos Energia e Automação Guião do trabalho prático TP7 Projecto de Porta Automática baseado em Autómato Programável
Gira-Sol. Professores Orientadores
 Page 1 of 10 Gira-Sol Alexandre Trentini Nunes da Silveira ( alexandre_tns@hotmail.com ) Filipe Alexandre Nasato ( filipe@cpu.eng.br ) Gustavo Cheminn Madruga ( gcmadruga@netpar.com.br ) João Victor Gonçalves
Page 1 of 10 Gira-Sol Alexandre Trentini Nunes da Silveira ( alexandre_tns@hotmail.com ) Filipe Alexandre Nasato ( filipe@cpu.eng.br ) Gustavo Cheminn Madruga ( gcmadruga@netpar.com.br ) João Victor Gonçalves
Página 1 de 7 PRÓ-REITORIA DE GRADUAÇÃO ANEXO "F" ESCOLA POLITÉCNICA CURRÍCULO IDEAL (EC3-2018) Curso: Engenharia Elétrica - Ênfase em Computação
 Curso: Engenharia Elétrica - Ênfase em Computação") s em Sequência Aconselhada Obrigatórias 1º semestre 4323101 Física I 3 0 3 45 MAC2166 Introdução à Computação MAT2453 Cálculo Diferencial e Integral I 6 0 6 90 MAT3457 Álgebra Linear I PCC3100 Representação
s em Sequência Aconselhada Obrigatórias 1º semestre 4323101 Física I 3 0 3 45 MAC2166 Introdução à Computação MAT2453 Cálculo Diferencial e Integral I 6 0 6 90 MAT3457 Álgebra Linear I PCC3100 Representação
Aula 12 Simulação em computador
 Portfolio MEEC 1 Aula 12 Simulação em computador Objectivos Introdução ao conceito de modelo e simulação em computador, usando um exemplo muito simples baseado no NXT. Portfolio MEEC 2 Por vezes é inadequado
Portfolio MEEC 1 Aula 12 Simulação em computador Objectivos Introdução ao conceito de modelo e simulação em computador, usando um exemplo muito simples baseado no NXT. Portfolio MEEC 2 Por vezes é inadequado
SERVIÇO PÚBLICO FEDERAL UNIVERSIDADE FEDERAL DO PARÁ INSTITUTO DE TECNOLOGIA FACULDADE DE ENGENHARIA DA COMPUTAÇÃO E TELECOMUNICAÇÕES
 FCT - SALA SALA 01 ITEC -B Segunda Terça Quarta Quinta Sexta 07:30 09:10 Física I Programação Física I Programação 09:20 11:00 Cálculo I/ TC01022 Redes Móveis JASMINE Cálculo I/ TC01022 Redes Móveis JASMINE
FCT - SALA SALA 01 ITEC -B Segunda Terça Quarta Quinta Sexta 07:30 09:10 Física I Programação Física I Programação 09:20 11:00 Cálculo I/ TC01022 Redes Móveis JASMINE Cálculo I/ TC01022 Redes Móveis JASMINE
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 05/07/2017 Currículo de Cursos Hora: 17:30:22
 UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 05/07/2017 Currículo de Cursos Hora: 17:30:22 Curso: Nível: Grau Conferido: Turno: Tipo: Modalidade: Funcionamento: Documento de Autorização: Engenharia da
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO Data: 05/07/2017 Currículo de Cursos Hora: 17:30:22 Curso: Nível: Grau Conferido: Turno: Tipo: Modalidade: Funcionamento: Documento de Autorização: Engenharia da
Roberto Machado 21/ago/2008. Painéis Inteligentes de Baixa Tensão Automation World 2008
 ABB Group - 1 Roberto Machado 21/ago/2008 Painéis Inteligentes de Baixa Tensão Automation World 2008 Porque utilizar Sistemas Inteligentes! " ABB Group - 2 - Evolução das Tecnologias Inteligentes #! $
ABB Group - 1 Roberto Machado 21/ago/2008 Painéis Inteligentes de Baixa Tensão Automation World 2008 Porque utilizar Sistemas Inteligentes! " ABB Group - 2 - Evolução das Tecnologias Inteligentes #! $
Apresentação... IX Prefácio... XI. Nomenclatura... XV
 Sumário Apresentação... IX Prefácio... XI Introdução... XIII Nomenclatura... XV Capítulo 1 Introdução aos Sistemas de Controle Avançado e Otimização de Processos... 1 1.1 Introdução ao Controle Avançado
Sumário Apresentação... IX Prefácio... XI Introdução... XIII Nomenclatura... XV Capítulo 1 Introdução aos Sistemas de Controle Avançado e Otimização de Processos... 1 1.1 Introdução ao Controle Avançado
CFM - Descrição técnica de motor sem escova
 CFM - Descrição técnica de motor sem escova Motor elétrico sem escova (BLDC motors, BL motors) também conhecido como motor eletronicamente comutada (EC motors) são motores síncronos que são alimentadas
CFM - Descrição técnica de motor sem escova Motor elétrico sem escova (BLDC motors, BL motors) também conhecido como motor eletronicamente comutada (EC motors) são motores síncronos que são alimentadas
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Departamento de Engenharia - Universidade Federal de Lavras
 Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
Programa de Pós-Graduação em Engenharia de Sistemas e Automação Área de Concentração: Engenharia de Sistemas e Automação (Engenharias IV) As atividades de pesquisa na área de concentração em Engenharia
17/4/2007. Prof. Dr. Alexandre da Silva Simões. Introdução Apresentação da lógica Fuzzy
 7/4/27 ula - Conjuntos clássicos e conjuntos Fuzzy Prof. Dr. lexandre da Silva Simões Toda lógica tradicional habitualmente assume que símbolos precisos estão sendo empregados. Elas portanto não são aplicáveis
7/4/27 ula - Conjuntos clássicos e conjuntos Fuzzy Prof. Dr. lexandre da Silva Simões Toda lógica tradicional habitualmente assume que símbolos precisos estão sendo empregados. Elas portanto não são aplicáveis