Sistemas Robóticos de Locomoção - Programação Robótica e Visão por Computador - Eng. Manuel Silva ISEP - IPP
|
|
|
- João Pedro Almada Candal
- 6 Há anos
- Visualizações:
Transcrição
1 Sistemas Robóticos de Locomoção - Programação Robótica e Visão por Computador - Eng. Manuel Silva ISEP - IPP
2 Índice da Apresentação 1. Limitações dos veículos tradicionais 2. Características dos veículos com pernas e aplicações potenciais 3. Evolução dos veículos com pernas 4. Aplicações actuais destes veículos 5. Perspectivas de desenvolvimento futuro e conclusões
3 Limitações dos Veículos Tradicionais Veículos com rodas exigem superfícies pavimentados rápidos eficientes difícil vencer obstáculos e desníveis grandes Veículos com lagartas +50% da superfície terrestre é inacessível a veículos tradicionais
4 Vantagens dos Veículos com Pernas Possibilidade de percorrerem trajectos acidentados irregulares com grandes desníveis transpor obstáculos de grandes dimensões Possibilidade de variar a altura ao solo efeito de amortecimento
5 Limitações dos Veículos com Pernas Difícil atingir velocidades elevadas Grande consumo energético (elevado número de actuadores) Controlo difícil
6 Campos de Aplicação Potenciais 3-Ds (Dirty, Doll, Dangerous) Exploração de locais remotos exploração espacial exporação do fundo marinho Ambientes hostis ou perigosos minas desminagem situações de catástrofe Entretenimento

7 Primeiras Ideias (I) Gravura de um dos primeiros veículos com pernas Século XVIII

8 Primeiras Ideias (II) Esboço da primeira máquina quadrúpede The Mechanical Horse (L.A.Rygg) patenteada em 14 de Fevereiro de 1893 nunca construída

9 Primeiras Ideias (III) Modelo de um tractor com pernas Primeira Guerra Mundial

10 Primeiras Ideias (IV) A primeira máquina bípede The SteamMan projectado por Georges Moore em 1893

11 Primeiras Implementações (I) O quadrúpede da G.E. projecto concluído em 1968 desenvolvido por R. Mosher primeiro camião com pernas controlado manualmente accionamento hidraúlico

12 Primeiras Implementações (II) Phoney Poney construído em 1966 desenvolvido por McGhee e Frank na University of South Carolina primeira máquina com pernas controlada por computador accionamento eléctrico

13 Primeiras Implementações (III) Big Muskie toneladas mina de carvão ao ar livre quatro pernas accionadas hidraulicamente
14 Projecto Dificuldades de Implementação estrutura mecânica do robô que tipo de actuadores nas juntas qual o melhor padrão de locomoção periódicos não-periódicos
15 Controlo Dificuldades de Implementação coordenação de múltiplas cadeias cinemáticas fechadas que sinais de comando devem ser enviados para as pernas para coordenar todos os graus de liberdade (muitos!) distribuição de força nas pernas como manter a estabilidade dinâmica ao parar




16 Estudos na Área de Controlo ARL MonopodII 2 d.o.f. accionamento eléctrico armazenamento/ recuperação de energia através de molas



17 Exemplos Actuais (I) ASV - Adaptive Suspension Vehicle motor combustão interna accionamento hidráulico capacidade de carga: 250 Kg

18 Exemplos Actuais (II) Walking chassis for multipurposes quadrúpede para efectuar transportes em terrenos acidentados


19 Exemplos Actuais (III) Plustech motor Diesel accionamento hidráulico protótipo com vários prémios

 Pipe Climbing pernas (2 d.o.f.)")
20 Exemplos Actuais (IV) Pipe Crawling Robot accionamento eléctrico 8 pernas (3 d.o.f.) Pipe Climbing Robot accionamento eléctrico 8 pernas (2 d.o.f.)

21 Exemplos Actuais (V) RobugII accionamento pneumático 4 pernas (3 d.o.f.)


22 Exemplos Actuais (VI) CWRU Robot III bio-design : CWRU Robot II: mímica do Stick Insect accionamento eléctrico CWRU Robot III: mímica da Blaberus Discoidalis accionamento pneumático CWRU RobotIV: actuadores musculares


23 Exemplos Actuais (VII) TUM mímica da Carausius Morosus geometria e cinemática das pernas padrões de locomoção sistema de controlo accionamento eléctrico



24 Exemplos Actuais (VIII) Rhex accionamento eléctrico whegs (wheels + legs)


25 Exemplos Actuais (IX) (Locomoção híbrida) Biped type legwheeled robot accionamento eléctrico duas pernas com rodas nas extremidades Roller-Walker accionamento eléctrico quatro pernas com rodas nas extremidades

26 Exemplos Actuais (X) (Locomoção híbrida) Trojan Horse conceito veículo híbrido rodas, com accionamento próprio, nas extremidades das pernas (8 d.o.f.) possibilidade de mover-se em terra e na água falta financiamento ao projecto





27 Exemplos Actuais (XI) Honda Humanoid Robot objectivo...should coexist and cooperate with human beings, by doing what a person can not do... introduzir robôs deste tipo nas fábricas accionamento eléctrico autonomia: 15 min capacidade de carga: 5 Kg/mão
")

28 Exemplos Actuais (XII) WABIAN (WAseda BIpedal humanoid) Humanoid Project bípede actuado electricamente 43 d.o.f. visão artificial


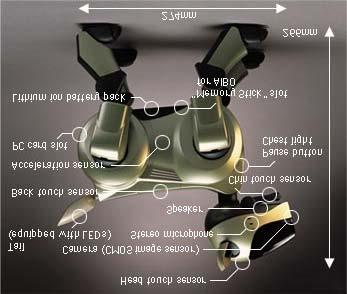


29 Exemplos Actuais (XIII) (Entretenimento) AIBO (SONY)
 SONY")
30 Exemplos Actuais (XIV) (Entretenimento) SONY Humanoid Robot


31 Exemplos Actuais (XV) SpringWalker bipedal exoskeleton ampliador de força disponível comercialmente
32 Perspectivas de Desenvolvimento Futuro Aprofundamento do estudo dos sistemas biológicos Novas estruturas cinemáticas para as pernas Sistemas de controlo mais poderosos (estabilidade dinâmica) Actuadores mais eficientes


33 O Futuro? Conclusão
34 Obrigado pela Vossa atenção! Sistemas Robóticos de Locomoção - Programação Robótica e Visão por Computador -
Modelização de Sistemas Robóticos de Locomoção Multi-Pernas - Estado da Arte (MCSD: 2004-Março-15) Eng. Manuel Silva ISEP - DEE
 Eng. Manuel Silva ISEP - DEE") Modelização de Sistemas Robóticos de Locomoção Multi-Pernas - Estado da Arte (MCSD: 2004-Março-15) Eng. Manuel Silva ISEP - DEE Índice da Apresentação 1. Limitações dos veículos tradicionais 2. Características
Modelização de Sistemas Robóticos de Locomoção Multi-Pernas - Estado da Arte (MCSD: 2004-Março-15) Eng. Manuel Silva ISEP - DEE Índice da Apresentação 1. Limitações dos veículos tradicionais 2. Características
Sistemas Robóticos de Locomoção - Principais Linhas de Investigação -
 Sistemas Robóticos de Locomoção - Principais Linhas de Investigação - Instituto Superior de Engenharia do Porto Mestrado em Engenharia Electrotécnica e de Computadores 2005-Março-01 Manuel F. Silva ISEP
Sistemas Robóticos de Locomoção - Principais Linhas de Investigação - Instituto Superior de Engenharia do Porto Mestrado em Engenharia Electrotécnica e de Computadores 2005-Março-01 Manuel F. Silva ISEP
LOCOMOÇÃO DE ROBÔS CAMINHANTES INSPIRADA EM SISTEMAS BIOLÓGICOS
 UNIVERSIDADE FEDERAL DE OURO PRETO UFOP ESCOLA DE MINAS EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU LOCOMOÇÃO DE ROBÔS CAMINHANTES INSPIRADA EM SISTEMAS BIOLÓGICOS MONOGRAFIA DE
UNIVERSIDADE FEDERAL DE OURO PRETO UFOP ESCOLA DE MINAS EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU LOCOMOÇÃO DE ROBÔS CAMINHANTES INSPIRADA EM SISTEMAS BIOLÓGICOS MONOGRAFIA DE
Pedro Tavares João Nuno Gonçalo Joana Cruz Joana Miller
 Pedro Tavares João Nuno Gonçalo Joana Cruz Joana Miller 1-Tópicos: os aspectos que constituem os sistemas robóticos, (fundamento e bases, componentes e tecnologias usadas neles); as diferentes aplicações
Pedro Tavares João Nuno Gonçalo Joana Cruz Joana Miller 1-Tópicos: os aspectos que constituem os sistemas robóticos, (fundamento e bases, componentes e tecnologias usadas neles); as diferentes aplicações
Robótica Móvel Locomoção e Controle. Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Robótica Móvel Locomoção e Controle Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 04/06/2018 Objetivos desta aula Conceitos básicos de controle de robôs
Robótica Móvel Locomoção e Controle Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS2ROB1 Fundamentos de Robótica Joinville 04/06/2018 Objetivos desta aula Conceitos básicos de controle de robôs
Carla Koike Depto. Ciências da Computação UnB
 Robótica Modular Reconfigurável Carla Koike Depto. Ciências da Computação UnB Definição Robôs compostos de um grande número de módulos repetidos que podem organizar suas conexões e formar uma grande variedade
Robótica Modular Reconfigurável Carla Koike Depto. Ciências da Computação UnB Definição Robôs compostos de um grande número de módulos repetidos que podem organizar suas conexões e formar uma grande variedade
Classificação. Classificação. Classificação. Classificação. Classificação. Introdução à Robótica Manipuladores e Robótica Móvel (classificação)
") Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Introdução à Robótica e Robótica Móvel (classificação) Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence
Robótica dos nossos dias
 Robótica dos nossos dias A evolução dos Humanóides Supervisor: Professora Teresa Duarte Monitor: Fernando Silva Luís Miguel Cardoso Seixas up201402833 Patrick David Roberto Mills up201403350 Paulo Jorge
Robótica dos nossos dias A evolução dos Humanóides Supervisor: Professora Teresa Duarte Monitor: Fernando Silva Luís Miguel Cardoso Seixas up201402833 Patrick David Roberto Mills up201403350 Paulo Jorge
Locomoção. Meios de Locomoção
 Locomoção Meios de Locomoção Propriedades da Locomoção Locomoção com Rodas 1 Meios de Locomoção Meios de locomoção terrestre: Rodas: o mais simples meio de locomoção; Esteiras: amplia a área de contato
Locomoção Meios de Locomoção Propriedades da Locomoção Locomoção com Rodas 1 Meios de Locomoção Meios de locomoção terrestre: Rodas: o mais simples meio de locomoção; Esteiras: amplia a área de contato
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis lpreis@fe.up.pt http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Controle II. Márcio J. Lacerda. 2 o Semestre Departamento de Engenharia Elétrica Universidade Federal de São João del-rei
 Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
Introdução. Introdução. Introdução. Locomoção. Introdução. Introdução à Robótica Robótica Móvel Locomoção
 Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
1ª ETAPA - TURMA D e K
 CÁLCULO DIFERENCIAL E INTEGRAL I PF 3 CIÊNCIAS DO AMBIENTE PF 3 ÉTICA E CIDADANIA I PF 3 FÍSICA GERAL I PF 3 GEOMETRIA ANALÍTICA E VETORES PF 3 FÍSICA EXPERIMENTAL I COMPUTAÇÃO, ALGORITMOS E PROGRAMAÇÃO
CÁLCULO DIFERENCIAL E INTEGRAL I PF 3 CIÊNCIAS DO AMBIENTE PF 3 ÉTICA E CIDADANIA I PF 3 FÍSICA GERAL I PF 3 GEOMETRIA ANALÍTICA E VETORES PF 3 FÍSICA EXPERIMENTAL I COMPUTAÇÃO, ALGORITMOS E PROGRAMAÇÃO
Introdução. Introdução. Introdução. Locomoção. Introdução. Introdução à Robótica Robótica Móvel Locomoção
 Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
Introdução Introdução à Robótica Robótica Móvel Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Um robô móvel necessita de mecanismos que o permitam navegar pelo ambiente Projetados de acordo com
1ª ETAPA - TURMA D e K
 CÁLCULO DIFERENCIAL E INTEGRAL I PAIE 3 CIÊNCIAS DO AMBIENTE PAIE 3 ÉTICA E CIDADANIA I PAIE 3 FÍSICA GERAL I PAIE 3 GEOMETRIA ANALÍTICA E VETORES PAIE 3 FÍSICA EXPERIMENTAL I PAIE 3 COMPUTAÇÃO, ALGORITMOS
CÁLCULO DIFERENCIAL E INTEGRAL I PAIE 3 CIÊNCIAS DO AMBIENTE PAIE 3 ÉTICA E CIDADANIA I PAIE 3 FÍSICA GERAL I PAIE 3 GEOMETRIA ANALÍTICA E VETORES PAIE 3 FÍSICA EXPERIMENTAL I PAIE 3 COMPUTAÇÃO, ALGORITMOS
Sistemas Robóticos de Locomoção. - Estado da Arte -
 Sistemas Robóticos de Locomoção - Estado da Arte - Manuel S. Silva * J. A. Tenreiro Machado ** * Assistente ** Professor Coordenador com Agregação ISEP Instituto Superior de Engenharia do Porto Departamento
Sistemas Robóticos de Locomoção - Estado da Arte - Manuel S. Silva * J. A. Tenreiro Machado ** * Assistente ** Professor Coordenador com Agregação ISEP Instituto Superior de Engenharia do Porto Departamento
Mini Eléctrico O paradigma dos transportes
 JORTEC Jornadas Tecnológicas da FCT da UNL 2007 Mini Eléctrico O paradigma dos transportes Pedro Granchinho de Matos granchinho@ipt.pt Carlos Ferreira; Hugo Ribeiro; Bruno Brito; Fernando Pais; Luís Tagaio;
JORTEC Jornadas Tecnológicas da FCT da UNL 2007 Mini Eléctrico O paradigma dos transportes Pedro Granchinho de Matos granchinho@ipt.pt Carlos Ferreira; Hugo Ribeiro; Bruno Brito; Fernando Pais; Luís Tagaio;
Classificação. Classificação. Classificação. Classificação. Classificação 03/23/2016
 Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Introdução à Robótica dos robôs Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br Japanese Industrial Robot Association (JIRA) Class 1: Manual Handling Device Class 2: Fixed-Sequence Robot Class 3:
Programação Robótica e Visão por Computador Trabalhos Práticos. Trabalhos Práticos
 Trabalhos Práticos Programação Robótica e Visão por Computador Curso: Engª Informática 5ª ano Ramo Computadores e Sistemas 1. Objectivos 2. Calendarização 3. Normas 3.1 Relatório 3.1 Apresentação 4. Propostas
Trabalhos Práticos Programação Robótica e Visão por Computador Curso: Engª Informática 5ª ano Ramo Computadores e Sistemas 1. Objectivos 2. Calendarização 3. Normas 3.1 Relatório 3.1 Apresentação 4. Propostas
hardware software software computador microcontrolador hardware sensores sistema de controle de malha fechada.
 Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes
 XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
XXV CONGRESSO DA SBC JAI 2005 Computação Embarcada Projeto e Implementação de Veículos Autônomos Inteligentes - GPVA http://www.eletrica.unisinos.br/~autonom Dr. Christian R. Kelber Dr. Cláudio R. Jung
Robótica Móvel. João Alberto Fabro André Schneider de Oliveira PPGCA/UTFPR
 Robótica Móvel João Alberto Fabro (fabro@utfpr.edu.br) André Schneider de Oliveira (andreoliveira@utfpr.edu.br) PPGCA/UTFPR Parte 1 Introdução e Histórico O que é Robótica? Conceitos Básicos Robótica Móvel
Robótica Móvel João Alberto Fabro (fabro@utfpr.edu.br) André Schneider de Oliveira (andreoliveira@utfpr.edu.br) PPGCA/UTFPR Parte 1 Introdução e Histórico O que é Robótica? Conceitos Básicos Robótica Móvel
Tabela I ENGENHARIA ELECTROTÉCNICA
 Tabela I ENGENHARIA ELECTROTÉCNICA Possíveis Saídas Profissionais: As engenheiras e os engenheiros electrotécnicos podem exercer a sua actividade profissional em: a) projecto de instalações eléctricas,
Tabela I ENGENHARIA ELECTROTÉCNICA Possíveis Saídas Profissionais: As engenheiras e os engenheiros electrotécnicos podem exercer a sua actividade profissional em: a) projecto de instalações eléctricas,
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web:
 Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
Docentes: Prof. parte da teoria Engº Luis Paulo Reis parte da teoria + aulas práticas Sítio Web: http://www.fe.up.pt/~eol/20032004/robotica/ Quadros powerpoint em pdf sobre alguns capítulos Ligação para
WL 70 Carregadoras articuladas de rodas. A máquina potente: Carregadora sobre rodas WL 70
 WL 70 Carregadoras articuladas de rodas A máquina potente: Carregadora sobre rodas WL 70 Graças à mais recente tecnologia e de acordo com os atuais padrões de emissão, a WL 70 provê uma motorização extremamente
WL 70 Carregadoras articuladas de rodas A máquina potente: Carregadora sobre rodas WL 70 Graças à mais recente tecnologia e de acordo com os atuais padrões de emissão, a WL 70 provê uma motorização extremamente
Protótipo de um robô rastreador de objetos. Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer
 Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Fundação Presidente Antônio Carlos FUPAC Unidade de Barão de Cocais MATRIZ CURRICULAR ENGENHARIA DE PRODUÇÃO
 MATRIZ CURRICULAR ENGENHARIA DE PRODUÇÃO 2012 1º PERÍODO Pré Geometria Analítica e Cálculo Vetorial 4 Introdução ao Cálculo 4 Introdução à Engenharia de Produção Introdução à Programação para Engenharia
MATRIZ CURRICULAR ENGENHARIA DE PRODUÇÃO 2012 1º PERÍODO Pré Geometria Analítica e Cálculo Vetorial 4 Introdução ao Cálculo 4 Introdução à Engenharia de Produção Introdução à Programação para Engenharia
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
ROBÔ PARA INSPEÇÃO DE ÁREAS CLASSIFICADAS E DE DIFÍCIL ACESSO COM TRANSMISSÃO DE IMAGENS SEM FIO
 ROBÔ PARA INSPEÇÃO DE ÁREAS CLASSIFICADAS E DE DIFÍCIL ACESSO COM TRANSMISSÃO DE IMAGENS SEM FIO Jonathan Pereira IFRN Campus Mossoró. E-mail: jonathan@cefetrn.br Alexsandro Galdino IFRN Campus Mossoró.
ROBÔ PARA INSPEÇÃO DE ÁREAS CLASSIFICADAS E DE DIFÍCIL ACESSO COM TRANSMISSÃO DE IMAGENS SEM FIO Jonathan Pereira IFRN Campus Mossoró. E-mail: jonathan@cefetrn.br Alexsandro Galdino IFRN Campus Mossoró.
UNIVERSIDADE DE RIO VERDE FACULDADE DE ENGENHARIA DE PRODUÇÃO PROGRAMA DE DISCIPLINA
 UNIVERSIDADE DE RIO VERDE FACULDADE DE ENGENHARIA DE PRODUÇÃO PROGRAMA DE DISCIPLINA Disciplina: Ergonomia Código da Disciplina: EPD 006 Curso: Engenharia de Produção Faculdade responsável: Engenharia
UNIVERSIDADE DE RIO VERDE FACULDADE DE ENGENHARIA DE PRODUÇÃO PROGRAMA DE DISCIPLINA Disciplina: Ergonomia Código da Disciplina: EPD 006 Curso: Engenharia de Produção Faculdade responsável: Engenharia
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes
 Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
UNIVERSIDADE FEDERAL DE SANTA CATARINA
 UNIVERSIDADE FEDERAL DE SANTA CATARINA ENGENHARIA MECÂNICA (Currículo em implantação progressiva a partir de 2006.1) 1ª FASE Código Disciplina h-a sem. h-a Pré-Req. Equivalente MTM5161 Cálculo A 4 72 MTM5512
UNIVERSIDADE FEDERAL DE SANTA CATARINA ENGENHARIA MECÂNICA (Currículo em implantação progressiva a partir de 2006.1) 1ª FASE Código Disciplina h-a sem. h-a Pré-Req. Equivalente MTM5161 Cálculo A 4 72 MTM5512
BELAZ 7555 ESPECIFICAÇÕES:
 BELAZ 7555 Dumper projectado para o transporte de cargas entre 5560 toneladas em todo o tipo de solos, em condições climáticas adversas (temperaturas entre 50º até +50º). É usado na construção civil e
BELAZ 7555 Dumper projectado para o transporte de cargas entre 5560 toneladas em todo o tipo de solos, em condições climáticas adversas (temperaturas entre 50º até +50º). É usado na construção civil e
RETROESCAVADORA DEM 310
 RETROESCAVADORA DEM 310 Projetado para realizar trabalhos de escavação, carregamento e descarregamento. Na retroescavadora é utilizada a transmissão hidromecânica de um dos maiores produtores do mundo
RETROESCAVADORA DEM 310 Projetado para realizar trabalhos de escavação, carregamento e descarregamento. Na retroescavadora é utilizada a transmissão hidromecânica de um dos maiores produtores do mundo
UNIVERSIDADE DO ESTADO DO RIO DE JANEIRO
 DELIBERAÇÃO nº 003/96 Altera a estrutura departamental da Faculdade de Engenharia O CONSELHO SUPERIOR DE ENSINO E PESQUISA, no uso da competência que lhe atribui o Artigo 11, parágrafo único do Estatuto,
DELIBERAÇÃO nº 003/96 Altera a estrutura departamental da Faculdade de Engenharia O CONSELHO SUPERIOR DE ENSINO E PESQUISA, no uso da competência que lhe atribui o Artigo 11, parágrafo único do Estatuto,
ROBÓTICA CONCEITOS. Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial
 SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CONCEITOS Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://giovanatangerino.wordpress.com
SP CAMPUS PIRACICABA ROBÓTICA Prof a. Dra. GIOVANA TRIPOLONI TANGERINO Tecnologia em Automação Industrial CONCEITOS Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://giovanatangerino.wordpress.com
ET24 Escavadoras de esteiras de projeção convencional
 ET24 Escavadoras de esteiras de projeção convencional ET24 - A evolução no seu mundo de trabalho. Com a nova geração de modelos na classe de 1,7 até 2,4 t a Wacker Neuson impõe marcos nas escavadoras compactas.
ET24 Escavadoras de esteiras de projeção convencional ET24 - A evolução no seu mundo de trabalho. Com a nova geração de modelos na classe de 1,7 até 2,4 t a Wacker Neuson impõe marcos nas escavadoras compactas.
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
Robótica Inteligente e Veículos Autônomos GIA / GPVA - Unisinos
 Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Dia da Computação Cursos de Informática UNOCHAPECÓ, Março 2004 Robótica Inteligente e Veículos Autônomos: Novos Desafios para a Computação Prof. Dr. Fernando Osório - osorio@exatas.unisinos.br http://inf.unisinos.br/~osorio/
Construção de um equipamento que possa realizar o esmerilhamento da superfície de rolamentos dos trilhos
 ESMERILHADORA DE TRILHOS Antenor Pazini O trabalho da Esmerilhadora II foi premiado em 1 lugar com um carro zero km Esmerilhadora I: 6 rebolos -construída em 2004 Esmerilhadora II: 16 rebolos -construída
ESMERILHADORA DE TRILHOS Antenor Pazini O trabalho da Esmerilhadora II foi premiado em 1 lugar com um carro zero km Esmerilhadora I: 6 rebolos -construída em 2004 Esmerilhadora II: 16 rebolos -construída
O último desenvolvimento da ADIRA a Quinadora Greenbender promete ser uma Revolução no mundo da quinagem
 O último desenvolvimento da ADIRA a Quinadora Greenbender promete ser uma Revolução no mundo da quinagem 1. Responde à tendência crescente de aumento de complexidade geométrica das peças quinadas, já que
O último desenvolvimento da ADIRA a Quinadora Greenbender promete ser uma Revolução no mundo da quinagem 1. Responde à tendência crescente de aumento de complexidade geométrica das peças quinadas, já que
A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica,
 Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
Fundamentos da tecnologia de robôs A robótica abrange tecnologia de mecânica, eletrônica e computação. Alem disso, participam em menor grau teoria de controle, microeletrônica, inteligência artificial,
SISTEMA DE SUSPENSÃO HÍBRIDA ATIVA PARA VEÍCULOS AGRÍCOLAS
 XLIV Congresso Brasileiro de Engenharia Agrícola - CONBEA 2015 Hotel Fazenda Fonte Colina Verde - São Pedro - SP 13 a 17 de setembro de 2015 SISTEMA DE SUSPENSÃO HÍBRIDA ATIVA PARA VEÍCULOS AGRÍCOLAS HUGO
XLIV Congresso Brasileiro de Engenharia Agrícola - CONBEA 2015 Hotel Fazenda Fonte Colina Verde - São Pedro - SP 13 a 17 de setembro de 2015 SISTEMA DE SUSPENSÃO HÍBRIDA ATIVA PARA VEÍCULOS AGRÍCOLAS HUGO
1ª ETAPA - TURMA D e K
 CÁLCULO DIFERENCIAL E INTEGRAL I CIÊNCIAS DO AMBIENTE ÉTICA E CIDADANIA I FÍSICA GERAL I GEOMETRINALÍTICA E VETORES FÍSICA EXPERIMENTAL I COMPUTAÇÃO, ALGORITMOS E PROGRAMAÇÃO I DESENHO TÉCNICO I GEOMETRIA
CÁLCULO DIFERENCIAL E INTEGRAL I CIÊNCIAS DO AMBIENTE ÉTICA E CIDADANIA I FÍSICA GERAL I GEOMETRINALÍTICA E VETORES FÍSICA EXPERIMENTAL I COMPUTAÇÃO, ALGORITMOS E PROGRAMAÇÃO I DESENHO TÉCNICO I GEOMETRIA
Disciplina de Introdução aos Sistemas Robóticos SSC-5887
 USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
USP - ICMC SSC / PG-CCMC SSC 5887 (ISR) - 1o. Semestre 2009 Disciplina de SSC-5887 Prof. Fernando Santos Osório Grupo SEER Email: fosorio [at] { icmc. usp. br, gmail. com } Web: http://www.icmc.usp.br/~fosorio/
ROBÓTICA INDUSTRIAL MECATRÔNICA
 A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
WL 52 Carregadoras articuladas de rodas. A carregadora clássica dos canteiros de obras: WL 52
 WL 52 Carregadoras articuladas de rodas A carregadora clássica dos canteiros de obras: WL 52 A WL 52 que não pode faltar em um canteiro de obras profissional. Além do potente sistema hidráulico, ela oferece
WL 52 Carregadoras articuladas de rodas A carregadora clássica dos canteiros de obras: WL 52 A WL 52 que não pode faltar em um canteiro de obras profissional. Além do potente sistema hidráulico, ela oferece
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA.
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA. Classificação de Robôs Pode-se classificar os robôs com base na aplicação pretendida: Industrial, Pesquisa, Militar, Segurança, Hobby ou Entretenimento,
FUNDO MUNICIPAL DE INVESTIMENTOS SOCIAIS
 a. Quadro Principal DEMONSTRAÇÃO DAS VARIAÇÕES PATRIMONIAIS : 2015 QUADRO - VARIAÇÕES PATRIMONIAIS QUANTITATIVAS Nota Impostos, Taxas e Contribuições de Melhoria Contribuições Exploração e Venda de Bens,
a. Quadro Principal DEMONSTRAÇÃO DAS VARIAÇÕES PATRIMONIAIS : 2015 QUADRO - VARIAÇÕES PATRIMONIAIS QUANTITATIVAS Nota Impostos, Taxas e Contribuições de Melhoria Contribuições Exploração e Venda de Bens,
Sistema de Controlo de Locomoção para Veículos Autónomos Terrestres. António Sérgio Gonçalves
 Sistema de Controlo de Locomoção para Veículos Autónomos Terrestres António Sérgio Gonçalves 2006 Projecto de fim de curso Lic. Eng. Electrotécnica Electrónica e Computadores Ramo de Automação e Sistemas
Sistema de Controlo de Locomoção para Veículos Autónomos Terrestres António Sérgio Gonçalves 2006 Projecto de fim de curso Lic. Eng. Electrotécnica Electrónica e Computadores Ramo de Automação e Sistemas
ANEXO I TABELA DE TRANSFORMAÇÃO DE CARGOS EDUCAÇÃO CARGOS TRANSFORMADOS ORD. CARGOS ANTIGOS CLASSES DE CARGOS ATUAIS
 ANEXO I TABELA DE TRANSFORMAÇÃO DE CARGOS EDUCAÇÃO CARGOS TRANSFORMADOS ORD. CARGOS ANTIGOS CLASSES DE CARGOS ATUAIS 1 Agente de Serviços Escolares Agente de Serviços Escolares Q. S. da Educação 2 CARGO
ANEXO I TABELA DE TRANSFORMAÇÃO DE CARGOS EDUCAÇÃO CARGOS TRANSFORMADOS ORD. CARGOS ANTIGOS CLASSES DE CARGOS ATUAIS 1 Agente de Serviços Escolares Agente de Serviços Escolares Q. S. da Educação 2 CARGO
Objetivos do curso. Bibliografia. Critérios de avaliação. Critérios de avaliação. Critérios de avaliação
 Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
Objetivos do curso Introdução à Prof. Douglas G. Macharet douglas.macharet@dcc.ufmg.br O objetivo deste curso é abordar os princípios fundamentais de manipuladores robóticos e da robótica móvel. Prover
M E C A N I S M O S. Cadeias Cinemáticas e Imposição de Movimento. Prof. José Maria
 M E C A N I S M O S Cadeias Cinemáticas e Imposição de Movimento Prof. José Maria Conceitos Iniciais Estudo cinemático dos diversos componentes mecânicos sistemas articulados; cames e excêntricos; catracas
M E C A N I S M O S Cadeias Cinemáticas e Imposição de Movimento Prof. José Maria Conceitos Iniciais Estudo cinemático dos diversos componentes mecânicos sistemas articulados; cames e excêntricos; catracas
Walter Fetter Lages. Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A
 Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04479 Robótica A Copyright (c) Walter Fetter Lages
M a n u e l C e l e s t i n o V i l e l a T e i x e i r a d e A l m e i d a
 M a n u e l C e l e s t i n o V i l e l a T e i x e i r a d e A l m e i d a AV A L I A Ç Ã O D O E F E I T O D E F O G O S F L O R E S T A I S N O R E G I M E D E E S C O A M E N T O E N A Q U A L I D
M a n u e l C e l e s t i n o V i l e l a T e i x e i r a d e A l m e i d a AV A L I A Ç Ã O D O E F E I T O D E F O G O S F L O R E S T A I S N O R E G I M E D E E S C O A M E N T O E N A Q U A L I D
(73) Titular(es): (72) Inventor(es): (74) Mandatário: (54) Epígrafe: PASSADEIRA DE PEÕES INTELIGENTE MULTIFUNÇÕES E MULTICONFIGURÁVEL
 Titular(es): (72) Inventor(es): (74) Mandatário: (54) Epígrafe: PASSADEIRA DE PEÕES INTELIGENTE MULTIFUNÇÕES E MULTICONFIGURÁVEL") (11) Número de Publicação: PT 105081 (51) Classificação Internacional: F21W 111/023 (2006) (12) FASCÍCULO DE PATENTE DE INVENÇÃO (22) Data de pedido: 2010.04.27 (30) Prioridade(s): (43) Data de publicação
(11) Número de Publicação: PT 105081 (51) Classificação Internacional: F21W 111/023 (2006) (12) FASCÍCULO DE PATENTE DE INVENÇÃO (22) Data de pedido: 2010.04.27 (30) Prioridade(s): (43) Data de publicação
ROBÓTICA, DOMÓTICA & CASAS INTELIGENTES
 ROBÓTICA, DOMÓTICA & CASAS INTELIGENTES CURSO TÉCNICO DE INFORMÁTICA SISTEMAS GRUPO 4 TECNOLOGIAS DO FUTURO - PROJECTO INTEGRADOR 1 A ideia de robô é bastante antiga e sua origem divide pesquisadores de
ROBÓTICA, DOMÓTICA & CASAS INTELIGENTES CURSO TÉCNICO DE INFORMÁTICA SISTEMAS GRUPO 4 TECNOLOGIAS DO FUTURO - PROJECTO INTEGRADOR 1 A ideia de robô é bastante antiga e sua origem divide pesquisadores de
DISTRIBUIDORES DE ESTRUME COM 1 SENFIM HORIZONTAL MONOBLOC SÉRIE BASIC
 DITRIBUIDRE DE ETRUME CM 1 ENFIM HRIZNTAL MNBLC ÉRIE BAIC MDEL J35 E36 MH1 J5 E7 MH1 Capacidade sem porta hidráulica 3,1 m³ 3,8 m³ Capacidade com porta hidráulica 3,00 m³ 3,61 m³ CARACTERÍTICA TÉCNICA
DITRIBUIDRE DE ETRUME CM 1 ENFIM HRIZNTAL MNBLC ÉRIE BAIC MDEL J35 E36 MH1 J5 E7 MH1 Capacidade sem porta hidráulica 3,1 m³ 3,8 m³ Capacidade com porta hidráulica 3,00 m³ 3,61 m³ CARACTERÍTICA TÉCNICA
MATRIZ CURRICULAR DO CURSO DE ENGENHARIA CIVIL
 MATRIZ CURRICULAR DO CURSO DE ENGENHARIA CIVIL 1º TERMO Aulas Teóricas Práticas Total Comunicação e Expressão 40-40 Cálculo Diferencial e Integral I 80-80 Fundamentos da Administração 40-40 Introdução
MATRIZ CURRICULAR DO CURSO DE ENGENHARIA CIVIL 1º TERMO Aulas Teóricas Práticas Total Comunicação e Expressão 40-40 Cálculo Diferencial e Integral I 80-80 Fundamentos da Administração 40-40 Introdução
HORÁRIOS DE FUNCIONAMENTO E ATENDIMENTO DOS SERVIÇOS DA CÂMARA MUNICIPAL DE MÉRTOLA
 DA CÂMARA MUNICIPAL DE MÉRTOLA 1. Os serviços da Câmara Municipal de Mértola podem funcionar, em regra, entre as 9H00 e as 18H00, de segunda a sexta-feira. 2. O horário de atendimento nos serviços municipais
DA CÂMARA MUNICIPAL DE MÉRTOLA 1. Os serviços da Câmara Municipal de Mértola podem funcionar, em regra, entre as 9H00 e as 18H00, de segunda a sexta-feira. 2. O horário de atendimento nos serviços municipais
WL 60 Carregadoras articuladas de rodas. O protagonista mais valioso e eficiente: Carregadora de rodas WL 60
 WL 60 Carregadoras articuladas de rodas O protagonista mais valioso e eficiente: Carregadora de rodas WL 60 A eficiência da WL 60 é imbatível: Graças ao opcional sistema sensor de carga controlado por
WL 60 Carregadoras articuladas de rodas O protagonista mais valioso e eficiente: Carregadora de rodas WL 60 A eficiência da WL 60 é imbatível: Graças ao opcional sistema sensor de carga controlado por
Engenharia Industrial-EM (Mestrado)
") Engenharia Industrial-EM (Mestrado) Complementos de Mecânica dos Fluidos 26/06 14:30 10/07 09:30 Mecânica Computacional 17/06 18:00 06/07 18:00 1 Mecatrónica 09/06 09:30 04/07 11:00 Processos de Ligação
Engenharia Industrial-EM (Mestrado) Complementos de Mecânica dos Fluidos 26/06 14:30 10/07 09:30 Mecânica Computacional 17/06 18:00 06/07 18:00 1 Mecatrónica 09/06 09:30 04/07 11:00 Processos de Ligação
O conceito de rover muitas vezes traz a ideia de atividades em outros
 20 1 Introdução A Simulação Computacional é um recurso muito utilizado por ter um custo muito menor do que os obtidos utilizando experimentos. Quase todos os campos da ciência aplicada, como Matemática,
20 1 Introdução A Simulação Computacional é um recurso muito utilizado por ter um custo muito menor do que os obtidos utilizando experimentos. Quase todos os campos da ciência aplicada, como Matemática,
Recolha de Lixo KO
 Recolha de Lixo KO45011 Principais benefícios: Simplicidade e confiabilidade na operação e manutenção; Contentores abertos, removíveis e grande capacidade volumétrica; Possibilidade de recolha de todos
Recolha de Lixo KO45011 Principais benefícios: Simplicidade e confiabilidade na operação e manutenção; Contentores abertos, removíveis e grande capacidade volumétrica; Possibilidade de recolha de todos
Introdução Introdução
 Introdução 19 1 Introdução Em outubro de 1986 a Petrobras descobriu a província petrolífera de Urucu (AM), situada na bacia do Rio Solimões em plena floresta Amazônica a 600 km da cidade de Manaus. Sendo
Introdução 19 1 Introdução Em outubro de 1986 a Petrobras descobriu a província petrolífera de Urucu (AM), situada na bacia do Rio Solimões em plena floresta Amazônica a 600 km da cidade de Manaus. Sendo
MATRIZ CURRICULAR DO CURSO DE ENGENHARIA CIVIL
 MATRIZ CURRICULAR DO CURSO DE ENGENHARIA CIVIL 1º TERMO Aulas Teóricas Práticas Total Comunicação e Expressão 36-36 Direito 36-36 Cálculo Diferencial e Integral I 72-72 Fundamentos da Administração 36-36
MATRIZ CURRICULAR DO CURSO DE ENGENHARIA CIVIL 1º TERMO Aulas Teóricas Práticas Total Comunicação e Expressão 36-36 Direito 36-36 Cálculo Diferencial e Integral I 72-72 Fundamentos da Administração 36-36
Grupo de Projeto, Fabricação e Automação Industrial. Heraldo Amorim
 Grupo de Projeto, Fabricação e Automação Industrial Heraldo Amorim Eng. Mecânica Eng. de Controle e Automação Design Laboratórios Laboratórios Laboratório de Metrologia Dimensional Lamed Laboratório de
Grupo de Projeto, Fabricação e Automação Industrial Heraldo Amorim Eng. Mecânica Eng. de Controle e Automação Design Laboratórios Laboratórios Laboratório de Metrologia Dimensional Lamed Laboratório de
Scania deve ser reconhecida como o verdadeiro parceiro de negócio na colaboração que vise um sistema de transporte sustentável.
 IG 42 (10/15) Data de emissão: 28 de outubro de 2015 Aqui e Agora Transporte Sustentável Scania deve ser reconhecida como o verdadeiro parceiro de negócio na colaboração que vise um sistema de transporte
IG 42 (10/15) Data de emissão: 28 de outubro de 2015 Aqui e Agora Transporte Sustentável Scania deve ser reconhecida como o verdadeiro parceiro de negócio na colaboração que vise um sistema de transporte
SNUC - SISTEMA NACIONAL DE UNIDADES DE CONSERVAÇÃO
 Prof. Dr. Thiago Leite Engenheiro Florestal (UnB-DF) Mestrado em Ciências Ambientais e Florestais com ênfase em Educação Ambiental (UnB-DF) Doutorado em Ciências Florestais com ênfase em Agroecologia (UnB-DF)
Prof. Dr. Thiago Leite Engenheiro Florestal (UnB-DF) Mestrado em Ciências Ambientais e Florestais com ênfase em Educação Ambiental (UnB-DF) Doutorado em Ciências Florestais com ênfase em Agroecologia (UnB-DF)
Typhoon Potência sobre 6 rodas Typhoon
 Invacare Typhoon Potência sobre 6 rodas A Invacare Typhoon é uma cadeira eléctrica com excelente performance para jovens activos. O sistema «Center Wheel Drive» assegura ao utilizador uma rotação e estabilidade
Invacare Typhoon Potência sobre 6 rodas A Invacare Typhoon é uma cadeira eléctrica com excelente performance para jovens activos. O sistema «Center Wheel Drive» assegura ao utilizador uma rotação e estabilidade
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
ET18. ET18 - A evolução no seu mundo de trabalho.
 ET18 Escavadoras de Esteiras de Projeção Convencional ET18 - A evolução no seu mundo de trabalho. Com a nova geração de modelos na classe de 1,7 até 2,4 t a Wacker Neuson impõe marcos nas escavadoras compactas.
ET18 Escavadoras de Esteiras de Projeção Convencional ET18 - A evolução no seu mundo de trabalho. Com a nova geração de modelos na classe de 1,7 até 2,4 t a Wacker Neuson impõe marcos nas escavadoras compactas.
ET18 Escavadoras de esteiras de projeção convencional
 ET18 Escavadoras de esteiras de projeção convencional ET18 - A evolução no seu mundo de trabalho. Com a nova geração de modelos na classe de 1,7 até 2,4 t a Wacker Neuson impõe marcos nas escavadoras compactas.
ET18 Escavadoras de esteiras de projeção convencional ET18 - A evolução no seu mundo de trabalho. Com a nova geração de modelos na classe de 1,7 até 2,4 t a Wacker Neuson impõe marcos nas escavadoras compactas.
Listagem de UC por curso
 Listagem de UC por curso Semestre * 2015-16 Escola Superior de Tecnologia e Gestão Administração Pública Direito Administrativo Contabilidade Financeira Introdução aos Estudos das Organizações Fundamentos
Listagem de UC por curso Semestre * 2015-16 Escola Superior de Tecnologia e Gestão Administração Pública Direito Administrativo Contabilidade Financeira Introdução aos Estudos das Organizações Fundamentos
BIO TRITURADOR BIOMATICH 81
 BIO TRITURADOR BIOMATICH 81 BIOMATICH 81 TPS 20 716,00 SUSPENSO AOS 3 PONTOS P.T.O. 540 rpm Potência do tractor 35 a 70 cv 2 rolos de tracção dentados hidráulicos Abertura efectiva dos rolos 250x150 mm
BIO TRITURADOR BIOMATICH 81 BIOMATICH 81 TPS 20 716,00 SUSPENSO AOS 3 PONTOS P.T.O. 540 rpm Potência do tractor 35 a 70 cv 2 rolos de tracção dentados hidráulicos Abertura efectiva dos rolos 250x150 mm
Recomendações de Especificação
 Recorda-se que é da vossa responsabilidade especificar os veículos de acordo as recomendações/obrigações. Nesse sentido têm à vossa disposição as seguintes ferramentas: Ferramenta de especificação: SDS-Q
Recorda-se que é da vossa responsabilidade especificar os veículos de acordo as recomendações/obrigações. Nesse sentido têm à vossa disposição as seguintes ferramentas: Ferramenta de especificação: SDS-Q
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO CAMPUS SÃO PAULO RAFAEL PEREIRA BACHEGA
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO CAMPUS SÃO PAULO RAFAEL PEREIRA BACHEGA DESENVOLVIMENTO DE UM ROBÔ HEXÁPODE PARA ESTUDOS DE ADAPTAÇÃO DE CAMINHADA EM AMBIENTES NÃO ESTRUTURADOS
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO CAMPUS SÃO PAULO RAFAEL PEREIRA BACHEGA DESENVOLVIMENTO DE UM ROBÔ HEXÁPODE PARA ESTUDOS DE ADAPTAÇÃO DE CAMINHADA EM AMBIENTES NÃO ESTRUTURADOS
CONTROLO. 3º ano 2º semestre 2005/2006. Transparências de apoio às aulas teóricas. Capítulo 1 Introdução ao Controlo
 Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano 2º semestre 2005/2006 Transparências de apoio às aulas
Licenciatura em Engenharia Electrotécnica e de Computadores (LEEC) Departamento de Engenharia Electrotécnica e de Computadores (DEEC) CONTROLO 3º ano 2º semestre 2005/2006 Transparências de apoio às aulas
Sistemas Robóticos Autónomos
 Sistemas Robóticos Autónomos 1MIEEC10 Grupo 4 Gonçalo Gil Joana Cruz Joana Miller João Nuno Pedro Tavares Índice 1. Resumo 2. Sistemas Robóticos Autónomos- o que são? 3. Componentes 4. Tecnologias envolvidas
Sistemas Robóticos Autónomos 1MIEEC10 Grupo 4 Gonçalo Gil Joana Cruz Joana Miller João Nuno Pedro Tavares Índice 1. Resumo 2. Sistemas Robóticos Autónomos- o que são? 3. Componentes 4. Tecnologias envolvidas
RAMO DE AUTOMAÇÃO E ROBÓTICA
 Projecto. nº M1 Título: Controlo de Robô Manipulador com Elos Flexíveis Docente acompanhante: Eng. Jorge Martins Áreas do tema: Robótica Desenvolvimento, implementação e teste de algoritmos de controlo
Projecto. nº M1 Título: Controlo de Robô Manipulador com Elos Flexíveis Docente acompanhante: Eng. Jorge Martins Áreas do tema: Robótica Desenvolvimento, implementação e teste de algoritmos de controlo
Listagem de UC por curso - ESTG 2º Semestre
 Listagem de UC por curso - ESTG Licenciatura em Engenharia Informática Matemática Discreta Programação II Tecnologias de Internet Sistemas Operativos Inglês Inteligência Artificial Segurança da Informação
Listagem de UC por curso - ESTG Licenciatura em Engenharia Informática Matemática Discreta Programação II Tecnologias de Internet Sistemas Operativos Inglês Inteligência Artificial Segurança da Informação
MATRIZ CURRICULAR DO CURSO DE ENGENHARIA ELÉTRICA
 1- BACHARELADO EM ENGENHARIA ELÉTRICA MATRIZ CURRICULAR DO CURSO DE ENGENHARIA ELÉTRICA 1º TERMO Aulas Teóricas Práticas Total Comunicação e Expressão 36-36 Cálculo Diferencial e Integral I 72-72 Informática
1- BACHARELADO EM ENGENHARIA ELÉTRICA MATRIZ CURRICULAR DO CURSO DE ENGENHARIA ELÉTRICA 1º TERMO Aulas Teóricas Práticas Total Comunicação e Expressão 36-36 Cálculo Diferencial e Integral I 72-72 Informática
QUADRO REGULATÓRIO. Rui Cunha Marques. Prof. Catedrático da Universidade de Lisboa Consultor da EU
 QUADRO REGULATÓRIO Prof. Catedrático da Universidade de Lisboa Consultor da EU rcmar@netcabo.pt www.ruicunhamarques.com Índice Introdução Enquadramento legal Proposta de reformulação do enquadramento legal:
QUADRO REGULATÓRIO Prof. Catedrático da Universidade de Lisboa Consultor da EU rcmar@netcabo.pt www.ruicunhamarques.com Índice Introdução Enquadramento legal Proposta de reformulação do enquadramento legal:
Características técnicas:
 PULVERIZADOR DE JARDIM OVS600S Projectado para a defesa química e no tratamento das plantas perenes em jardins, vinhas e bagas de pragas e doenças na superfície com o uso do fluxo de ar direccional. O
PULVERIZADOR DE JARDIM OVS600S Projectado para a defesa química e no tratamento das plantas perenes em jardins, vinhas e bagas de pragas e doenças na superfície com o uso do fluxo de ar direccional. O
NOVIDADE. Invacare Action Vertic
 Invacare Action Vertic Ganhe Altura! A cadeira de rodas Action Vertic da Invacare é uma cadeira de propulsão manual e ver ticalização eléctrica. Destinada a utilizadores activos que desejam ver ticalizarem-se
Invacare Action Vertic Ganhe Altura! A cadeira de rodas Action Vertic da Invacare é uma cadeira de propulsão manual e ver ticalização eléctrica. Destinada a utilizadores activos que desejam ver ticalizarem-se
GLADIADOR Melhor relação peso/potência da categoria
 GLADIADOR 2300 Melhor relação peso/potência da categoria Catálogo virtual Português Ago/2016 GLADIADOR 2300 O pulverizador autopropelido Gladiador 2300 apresenta grande autonomia de trabalho, possibilitando
GLADIADOR 2300 Melhor relação peso/potência da categoria Catálogo virtual Português Ago/2016 GLADIADOR 2300 O pulverizador autopropelido Gladiador 2300 apresenta grande autonomia de trabalho, possibilitando
ASPIRADORA E RECTIFICADORA
 ORTOMEC ASPIRADORA E RECTIFICADORA CLEANER Baby Leaf Rúcula Espinafres CÓDIGO LARGURA DE RECOLHA CL -120 CL -130 CL -140 CL -150 CL -160 CL -170 CL -180 120 130 140 150 160 170 180 Salsa Valeriana LARGURA
ORTOMEC ASPIRADORA E RECTIFICADORA CLEANER Baby Leaf Rúcula Espinafres CÓDIGO LARGURA DE RECOLHA CL -120 CL -130 CL -140 CL -150 CL -160 CL -170 CL -180 120 130 140 150 160 170 180 Salsa Valeriana LARGURA
CSEM4011 Mecânica Geral I CSEM4010 Cálculo B. CSEM4014 Mecânica dos Sólidos I
 CÓDIGO NOME DA DISCIPLINA SEM CÓDIGO PRÉ-REQUISITO CSEM4011 Mecânica Geral I 2 CSEM4013 Resistência dos Materiais 2 CSEM4008 Álgebra Linear e Geometria Analítica 2 CSEM4004-2 CSEM4012 Desenho Técnico II
CÓDIGO NOME DA DISCIPLINA SEM CÓDIGO PRÉ-REQUISITO CSEM4011 Mecânica Geral I 2 CSEM4013 Resistência dos Materiais 2 CSEM4008 Álgebra Linear e Geometria Analítica 2 CSEM4004-2 CSEM4012 Desenho Técnico II
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ
 DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Klotz 1, Marcus Eduardo Deckert 1, Mauro André Pagliosa 2 1. Aluno do IFC Câmpus Luzerna, curso Técnico em Automação Industrial.
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Klotz 1, Marcus Eduardo Deckert 1, Mauro André Pagliosa 2 1. Aluno do IFC Câmpus Luzerna, curso Técnico em Automação Industrial.
ESTG Ano Letivo º semestre
 ESTG Ano Letivo 2018-19 - 2º semestre Licenciatura em Gestão Finanças Empresariais I Contabilidade Financeira II Estatística Aplicada à Gestão II Microeconomia Tecnologias e Sistemas de Informação Modelos
ESTG Ano Letivo 2018-19 - 2º semestre Licenciatura em Gestão Finanças Empresariais I Contabilidade Financeira II Estatística Aplicada à Gestão II Microeconomia Tecnologias e Sistemas de Informação Modelos
Controle de Robôs Manipuladores. Prof. Valdir Grassi Junior sala 2986 (prédio antigo)
") Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
Controle de Robôs Manipuladores Prof. Valdir Grassi Junior e-mail: vgrassi@usp.br sala 2986 (prédio antigo) Introdução Robôs Manipuladores O que são robôs manipuladores? Robôs Manipuladores Industriais
WL 32 Carregadoras articuladas de rodas. Potente e compacto - WL 32
 WL 32 Carregadoras articuladas de rodas Potente e compacto - WL 32 Graças especialmente a sua largura reduzida, a WL 32 fornece resultados de primeira classe mesmo em áreas estreitas. O teto rebaixado
WL 32 Carregadoras articuladas de rodas Potente e compacto - WL 32 Graças especialmente a sua largura reduzida, a WL 32 fornece resultados de primeira classe mesmo em áreas estreitas. O teto rebaixado
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ RESUMO
 DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Felipe Klotz 1 ; Mauro André Pagliosa 2 RESUMO Robôs autônomos estão sendo empregados em diversas tarefas onde para o
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Felipe Klotz 1 ; Mauro André Pagliosa 2 RESUMO Robôs autônomos estão sendo empregados em diversas tarefas onde para o
Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada. EESC-USP M. Becker /78
 Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
Aula 1 Introdução à Robótica Móvel Introdução Prof. Dr. Marcelo Becker EESC - USP Sumário da Aula Histórico Aplicações Problemas Básicos Desafios e Tendências Exemplos - Vídeos Bibliografia Recomendada
60 E 60 1º GAN00143 Álgebra Linear Aplicada 90
 FORMULÁRIO N 16 - E Q U I VALÊNCIA D E D I S C I P L I N A S/ATIVI D A D E S 1º GMA00019 Cálculo IA 60 1º GMA04043 Cálculo Diferencial e Integral 60 Aplicado I 1º E GGM00127 Geometria Analítica e Cálculo
FORMULÁRIO N 16 - E Q U I VALÊNCIA D E D I S C I P L I N A S/ATIVI D A D E S 1º GMA00019 Cálculo IA 60 1º GMA04043 Cálculo Diferencial e Integral 60 Aplicado I 1º E GGM00127 Geometria Analítica e Cálculo
A combinação entre força e flexibilidade. WL 30 Carregadeiras de rodas: capacidade do balde < 0,65 m³
 WL 30 Carregadeiras de rodas: capacidade do balde < 0,65 m³ A combinação entre força e flexibilidade A carregadora Wacker Neuson WL30 desenvolve através do seu potente motor Perkins de 49 PS, em combinação
WL 30 Carregadeiras de rodas: capacidade do balde < 0,65 m³ A combinação entre força e flexibilidade A carregadora Wacker Neuson WL30 desenvolve através do seu potente motor Perkins de 49 PS, em combinação
Aula 01 Introdução ao Controlo Sistemas
 Aula 01 Introdução ao Controlo Sistemas Controlo de Sistemas Controlo de Sistemas área muito ampla A palavra sistema (system) tem um significado muito amplo. Coisas muito diferentes podem ser exemplos
Aula 01 Introdução ao Controlo Sistemas Controlo de Sistemas Controlo de Sistemas área muito ampla A palavra sistema (system) tem um significado muito amplo. Coisas muito diferentes podem ser exemplos
EMAF EXPONOR 21 NOV 2018
 EMAF EXPONOR 21 NOV 2018 29.11.2018 2 Existem 3 formas de adquirir uma plataforma área de trabalho: Completamente montada em chassis; Plataforma de lagartas; Versão em KIT 29.11.2018 3 Uma instalação completa
EMAF EXPONOR 21 NOV 2018 29.11.2018 2 Existem 3 formas de adquirir uma plataforma área de trabalho: Completamente montada em chassis; Plataforma de lagartas; Versão em KIT 29.11.2018 3 Uma instalação completa