INF 2063 Visualização de Modelos Massivos Trabalho de Pesquisa
|
|
|
- Davi Felgueiras Coradelli
- 5 Há anos
- Visualizações:
Transcrição
1 INF 2063 Visualização de Modelos Massivos Trabalho de Pesquisa Descarte por Oclusão CHC++ e FastV Vitor Barata R. B. Barroso vbarata@tecgraf.puc-rio.br
2 Motivação Descarte por Visibilidade Renderização de cenas complexas em tempo real Modelos CAD detalhados Formas escaneadas Resultados de simulações físicas, como de fluidos Cenas complexas em geral Objetivo Processar e enviar à placa gráfica apenas o conjunto de primitivas necessário para formar a imagem final (PVS Potentially Visible Set) Descartar, com testes rápidos, toda ou a maior parte da geometria que não contribui para o resultado final



3 Exemplo de Modelo CAD Complexo Double Eagle Tanker (fonte: NVNews - NVIDIA GeForce3 Preview)
4 Exemplo de Modelo CAD Complexo P objetos vértices

5 Descarte por Visibilidade Principais tipos de descarte Contra o volume de visão: primitivas fora do campo visual Por oclusão: primitivas escondidas atrás de outras primitivas Descarte por visibilidade contra volume de visão e por oclusão (fonte: OpenGL optimizer programmer's guide: an open API for large-model visualization)

6 Exemplo de Motor de Jogo (CHC++) Unknown Worlds - Natural Selection 2 (

7 Exemplo de Motor de Jogo (CHC++) Unknown Worlds - Natural Selection 2 (

8 Exemplo de Motor de Jogo (CHC++) Unknown Worlds - Natural Selection 2 (
9 Descarte por Oclusão Processamento Online (por ponto): O PVS é determinado dinamicamente, em tempo de execução, para o ponto onde se encontra o observador no momento. Offline (por região): Em pré-processamento, determina-se o PVS para vários pontos-devista espalhados pela cena. Em tempo de execução, escolhe-se e utiliza-se o PVS do ponto mais próximo. Abordagem Exata: Determinam-se exatamente as primitivas visíveis ao observador. Conservativa: Primitivas oclusas podem ser incluídas no PVS para economizar cálculos. Agressiva: Primitivas visíveis podem ser excluídas do PVS. Espaço Do objeto: o PVS é determinado a partir de testes envolvendo a geometria dos objetos da cena em seu espaço original. (Fast-V) Da imagem: consideram-se os objetos após a rasterização, ou seja, uma amostragem de suas distâncias até o observador, como a fornecida pelo próprio z-buffer. (CHC++)
10 Teste de Oclusão em Hardware Permite perguntar à placa gráfica quantos pixels seriam rasterizados numa operação de desenho qualquer Considera teste de z com z-buffer atual Operação assíncrona Chamada retorna imediatamente Resultado demora algum tempo para ficar disponível Pode-se consultar rapidamente se o resultado já está pronto Problema: ociosidade da CPU e da GPU Se o resultado for requisitado cedo demais, CPU espera até que esteja disponível Falta de novos dados para a GPU deixa-a subutilizada
11 Teste de Oclusão em Hardware Idéia básica Desenhar os objetos da cena do mais próximo para o mais distante Fazer uma occlusion query enviando o volume envolvente do objeto Se o resultado não indicar a rasterização de nenhum fragmento, a geometria correspondente está oclusa e não precisa ser desenhada Pontos positivos Todos os objetos da cena podem ser oclusores e oclusos, independente de sua complexidade Fusão de oclusores: um objeto pode ser escondido por mais de um oclusor em locais diferentes, uma característica que é capturada automaticamente Utilização do poder de processamento paralelo da GPU Facilidade de integração a algoritmos de rendering
12 Teste de Oclusão em Hardware Cuidados básicos Volume envolvente deve ser rápido de se desenhar preferir uma caixa a uma esfera Volume envolvente deve se ajustar bem à geometria Volumes grandes demais tornam o teste ultra-conservativo Minimizar tamanho do PVS Desenho do mais próximo para o mais distante Calcular a distância de cada objeto ao observador Organizar uma fila de prioridades
13 Algoritmo Hierárquico Explorar a coerência espacial da cena Organizar a cena numa hierarquia Subdivisão espacial (grid regular, octree, kd-tree) Hierarquia de volumes envolventes (AABB, OBB) Critério de subdivisão do espaço ou de agrupamento de primitivas Percorrer os nós da hierarquia Testar contra o volume de visão Testar por oclusão e esperar o resultado Se o nó estiver visível Percorrer os filhos do mais próximo ao mais distante Desenhar a geometria das folhas Se o nó estiver invisível Interromper o percorrimento deste ramo da hierarquia
14 Descarte Coerente Hierárquico (CHC) Ociosidade do CPU e da GPU Idéia Explorar a coerência temporal da classificação de visibilidade Visível tende a continuar visível e vice-versa Reorganizar as chamadas Intercalar testes de oclusão com outras operações Enquanto espera, CPU continua processando e enviando dados à GPU
15 Descarte Coerente Hierárquico (CHC) Nós de término de um percorrimento Nós internos invisíveis Folhas, visíveis ou não, com pai visível Algoritmo Fila de testes Testes requisitados são armazenados numa fila até que seus resultados estejam disponíveis Percorrimento começa nos nós de término do quadro anterior Nós internos anteriormente visíveis são pulados Nós previamente invisíveis: requisitar o teste e armazenar na fila Folhas previamente visíveis requisitar e armazenar o teste desenhar imediatamente assumindo que a visibilidade é mantida o resultado do teste será usado no quadro seguinte
16 Descarte Coerente Hierárquico (CHC) Sempre que houver um resultado de teste disponível Se visível, processam-se os filhos ou desenha-se a geometria Se invisível, descarta-se toda a sub-árvore com raiz no nó ocluso Propagação de visibilidade No percorrimento, marcamos todo nó visitado como invisível Quando um nó visível é detectado, propagamos a mudança para os ancestrais Permanecem invisíveis apenas nós cujos filhos sejam todos invisíveis
17 Descarte Coerente Hierárquico (CHC) Inconsistência Imagine dois objetos A e B, ambos invisíveis em certo quadro No quadro seguinte, o teste de oclusão de A pode ser iniciado antes que se termine o de B Se B ficou visível, somos incapazes de detectar uma possível oclusão de A por B Isso apenas torna o algoritmo mais conservativo! observador oclusor temporário B A
18 Descarte Coerente Hierárquico (CHC) Otimizações Objetos visíveis tendem a continuar visíveis Podemos refazer seus testes de oclusão apenas a cada n av quadros Tolerância em pixels para visibilidade Consideramos visíveis apenas objetos que rasterizem pelo menos n vp fragmentos Espera nula da CPU Sempre que formos forçados a esperar o resultado de um teste de oclusão, podemos aproveitar e já desenhar algum objeto da fila Escolher sempre os objetos mais leves para não desperdiçar trabalho demais caso ele esteja oculto afinal de contas
19 Algoritmo CHC++ Problemas da abordagem anterior Desempenho Grande número de testes de oclusão Grande número de mudanças de estado da renderização Existência ainda de algum tempo de CPU em espera Desenho muito conservador, de mais geometria do que o necessário Aplicabilidade Impossibilidade de integração com algoritmos de renderização otimizados, com coleta de objetos separados por materiais e shaders
20 Algoritmo CHC++ Testes de visibilidade em lote Minimizar mudanças de estado da renderização Grupos (lotes) de testes são requisitados conjuntamente Lotes de nós previamente invisíveis Em vez de requisitar imediatamente, colocar na fila-i Quando o número de nós na fila chegar a um valor b, fazem-se todas as requisições de uma vez Tradeoff Menos mudanças de estado x Atraso nos resultados dos testes Algoritmo não é muito sensível, bons resultados para 20 < b < 80
21 Algoritmo CHC++ Lotes de folhas previamente visíveis Geometria desenhada imediatamente, independente do teste Em vez de requisitar imediatamente, colocar o teste na fila-v Resultados só serão úteis no próximo quadro! Requisitar testes da fila-v apenas quando não houver mais nós da hierarquia a percorrer ou testes já prontos para processar Ao final do quadro, requisitar os testes restantes na fila-v Integração a algoritmos de renderização Em vez de desenhar imediatamente, colocar numa fila de renderização Renderizar toda a fila logo antes de qualquer teste de oclusão Fila pode ser ordenada por materiais, shaders, ou como desejado

22 Algoritmo CHC++
23 Algoritmo CHC++ Multitestes Minimizar número de testes de oclusão Se toda uma parte da cena está invisível, basta um único teste para saber se ela continua invisível Ex.: cena e observador estáticos Idéia: Agrupar nós previamente invisíveis que têm a mesma probabilidade de permanecerem assim no quadro atual Fazer apenas um teste desenhando todos os nós Se invisível, mantém todos invisíveis e economiza vários testes Se visível, testa um por um (faz apenas o primeiro teste a mais) Probabilidade: Quanto mais tempo um nó se mantiver sem alterar sua classificação, mais provável é que ele continue se mantendo assim
24 Algoritmo CHC++ Custo-benefício de multitestes Número de quadros que um nó N mantém sua classificação inalterada: i N (persistência de visibilidade) Probabilidade de o nó continuar mantendo sua classificação como invisível: p keep (i) 0,99 0,7 e -i (ajustado a medidas empíricas) Probabilidade de o multiteste M falhar (algum nó N M se tornar visível): p fail (M) = 1 - Π N M [p keep (i N )] Custo de um multiteste: número de testes esperado C(M) = 1+ p fail (M) M Benefício de um multiteste: número de nós B(M) = M Custo-benefício: V(M) = B(M) / C(M) Estratégia gulosa de agrupamento: Agrupar os nós seguindo a ordem de p keep (i N ), até achar V(M) máximo Produz grupos maiores para p keep mais alto!
25 Algoritmo CHC++ CHC: objetos visíveis tendem a continuar visíveis Refazer seus testes de oclusão apenas a cada n av quadros Alinhamento de testes de oclusão quando objetos se tornam visíveis simultaneamente! Quando um objeto se torna visível, a espera até o primeiro teste de oclusão será de r quadros, com r aleatório entre 0 e n av Volumes envolventes mais justos Uso de AABBs simples Para nós internos, volume é a únião dos volumes dos filhos! Refinamos o volume até um nível d max abaixo do pai Paramos de refinar se os volumes filhos tiverem muita sobreposição
26 Algoritmo CHC++ Resultado: Estado-da-Arte atual em descarte por oclusão por ponto!
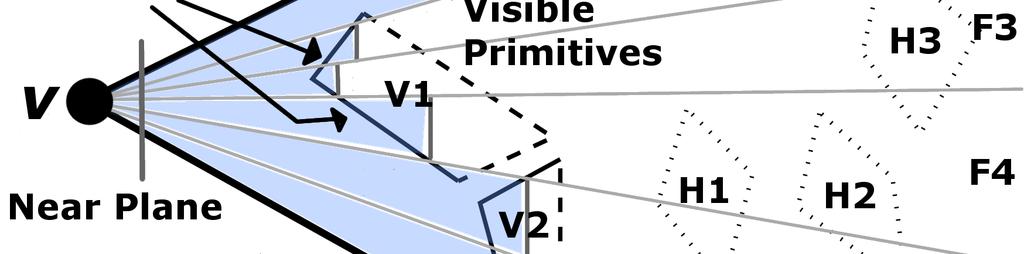
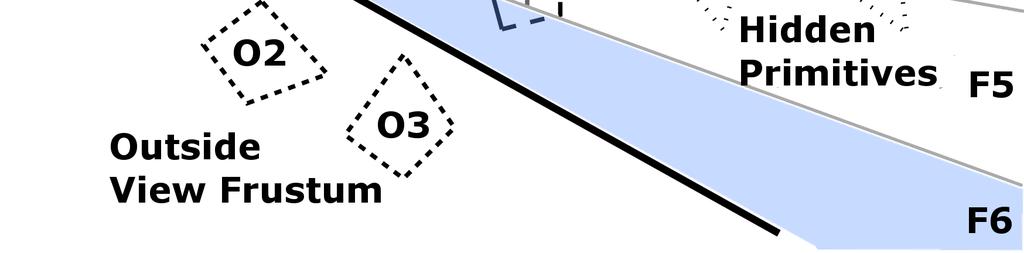
27 Algoritmo Fast-V Idéia básica Subdividir o volume de visão em um grande número de pequenos frusta Subdivisão uniforme ou adaptativa Encontrar um oclusor, composto por triângulos conectados, que bloqueie cada frustum Ajustar o plano far e calcular o PVS de cada frustum O PVS final é dado pela união dos PVS individuais Espaço do objeto Calcula o subconjunto de primitivas que são atingidas por qualquer raio traçado pelo interior do volume de visão Pode calcular PVS muito conservativo, com objetos através de frestas menores que um pixel! Oclusores devem ser homeomorfos a discos

28 Algoritmo Fast-V
29 Algoritmo Fast-V Pontos positivos Aplicável a quaisquer objetos triangulados, independente de seu tamanho ou disposição Primeiro algoritmo no espaço do objeto a ter desempenho suficiente para ser aplicável em tempo real PVS conservativo, que converge para o exato conforme aumenta a subdivisão de frusta, com precisão a nível de primitivas Escalável em multiprocessadores, cada frustum é independente Pontos negativos Não faz fusão de oclusores (PVS maior que o necessário) Otimizado apenas para modelos com informações topológicas Não tem extensão para modelos massivos out-of-core Mais lento e difícil de implementar do que CHC Parece convergir para espaço da imagem com um frustum por pixel
30 Algoritmo Fast-V Representação de um frustum 4 raios, partindo do observador, por cada aresta da pirâmide Planos near (fixo) e far (ajustável) paralelos Hierarquia de volumes envolventes (AABB) Interseção: o frustum está sendo totalmente/parcialmente bloqueado pela AABB? Triângulos nas folhas Representados por suas 3 arestas orientadas Interseção: O frustum está sendo totalmente/parcialmente bloqueado por dado triângulo?
 Dadas duas linhas orientadas (d 1 :m 1 ) e (d 2 :m 2 ), o sinal de (d 1 m 2 +m 1 d 2 ) indica")

31 Algoritmo Fast-V Coordenadas de Plücker Uma linha orientada no espaço 3D pode ser caracterizada por 6 coordenadas homogêneas usando-se dois vetores: d Vetor entre dois pontos x e y da linha, dados em relação à origem m Produto vetorial (x y) Dadas duas linhas orientadas (d 1 :m 1 ) e (d 2 :m 2 ), o sinal de (d 1 m 2 +m 1 d 2 ) indica em qual sentido ou orientação uma linha precisa girar para se tornar coplanar à outra Testes rápidos (e conservativos) de interseção Um frustum está dentro de um triângulo se suas 4 arestas têm a mesma orientação em relação às 3 arestas do triângulo Um frustum intercepta uma aresta se suas 4 arestas têm orientações diferentes em relação a ela


 uma aresta de silhueta (triângulos incidentes com")
32 Algoritmo Fast-V Bloqueador de um frustum Conjunto de triângulos conectados que bloqueia todos os raios internos ao frustum Se um triângulo bloqueia parcialmente um frustum: Encontramos as arestas interceptadas Caminhamos pelos triângulos vizinhos adjacentes a essas arestas Achamos um bloqueador se o caminhamento fechar um ciclo Desistimos conservativamente se encontrarmos: uma aresta livre (apenas um triângulo incidente) uma aresta de silhueta (triângulos incidentes com normais opostas)

33 Algoritmo Fast-V Atualização do plano far Para cada triângulo do bloqueador Tomamos a distância, até o plano near, de cada ponto de interseção dos raios do frustum com o plano do triângulo Escolhemos para o plano far a maior distância encontrada
34 Algoritmo Fast-V Subdivisão do volume de visão a partir do plano near Caso mais simples: grid uniforme Distribuição desigual de geometria pela cena: grid adaptativo Estrutura de quadtree Frusta com PVS muito grandes são subdivididos os filhos são computados com base na área de oclusores parciais, numa tentativa de torná-los oclusores totais dos sub-frusta Modelo sem topologia Subdividir repetidamente os frusta até que cada um seja bloqueado por apenas um triângulo Implementação multi-core Simples e escalável, já que o processamento de cada frustum é independente dos demais
35 Conclusão Fast-V é o primeiro algoritmo viável de descarte por oclusão por ponto no espaço do objeto Algoritmos no espaço da imagem ainda oferecem várias vantagens Desempenho superior Facilidade de implementação Facilidade de incorporação a renderizadores Fusão de oclusores e poder da GPU ganhos de graça Independência da geometria da cena Qualquer coisa que marque o z-buffer! Projeto: Implementar CHC++ Incorporar ao grafo de cena SG do Tecgraf
36 Referências [1] Notas de aula [2] P. Santos, Técnicas de Otimização para Visualização de Modelos Massivos Relatório Final de Projeto, PUC-Rio, 2006 [3] J Bittner,M Wimmer, H. Piringer, W. Purgathofer, Cooherent Hierarchical Culling: Hardware Occlusion Made Useful Proceedings of Eurographics 2004 [4] O. Mattausch, J. Bittner, M. Wimmer, CHC++: Coherent Hierarchical Culling Revisited Proceedings of Eurographics 2008 [5] A Chandak, L. Antani, M. Taylor, D. Manocha, Fast-V: Frompoint Visibility Culling on Complex Models Proceedings of Eurographics 2009
INF 2063 Visualização de Modelos Massivos
 INF 2063 Visualização de Modelos Massivos Descarte por Oclusão Algoritmo CHC++ Vitor Barata R. B. Barroso vbarata@tecgraf.puc-rio.br Motivação Descarte por Visibilidade Renderização de cenas complexas
INF 2063 Visualização de Modelos Massivos Descarte por Oclusão Algoritmo CHC++ Vitor Barata R. B. Barroso vbarata@tecgraf.puc-rio.br Motivação Descarte por Visibilidade Renderização de cenas complexas
INF 2063 Visualização de Modelos Massivos Trabalho de Pesquisa
 INF 2063 Visualização de Modelos Massivos Trabalho de Pesquisa Descarte por Oclusão Algoritmo CHC++ Vitor Barata R. B. Barroso vbarata@tecgraf.puc-rio.br Descarte por Visibilidade Principais tipos de descarte
INF 2063 Visualização de Modelos Massivos Trabalho de Pesquisa Descarte por Oclusão Algoritmo CHC++ Vitor Barata R. B. Barroso vbarata@tecgraf.puc-rio.br Descarte por Visibilidade Principais tipos de descarte
Visualização Interativa de Modelos Massivos de Engenharia na Indústria de Petróleo com o Algoritmo de Voxels Distantes
 Visualização Interativa de Modelos Massivos de Engenharia na Indústria de Petróleo com o Algoritmo de Voxels Distantes Gustavo Wagner Marcelo Gattass Alberto Raposo Desafio P-50 (modelada no 3dsmax) 1.2
Visualização Interativa de Modelos Massivos de Engenharia na Indústria de Petróleo com o Algoritmo de Voxels Distantes Gustavo Wagner Marcelo Gattass Alberto Raposo Desafio P-50 (modelada no 3dsmax) 1.2
2 Técnicas e Trabalhos Relacionados
 17 2 Técnicas e Trabalhos Relacionados Um bom renderizador de modelos massivos tem que ser capaz de resolver três pontos: reduzir a complexidade da geometria onde ela não for necessária, não renderizar
17 2 Técnicas e Trabalhos Relacionados Um bom renderizador de modelos massivos tem que ser capaz de resolver três pontos: reduzir a complexidade da geometria onde ela não for necessária, não renderizar
INF 2063 Tópicos em CG III
 INF 2063 Tópicos em CG III Visualização de Modelos Massivos Prof. Alberto Raposo Tecgraf / DI / PUC-Rio Aula 02 Visibility for Walkthrough Applications Livro Real-Time Massive Model Rendering Sung-eui
INF 2063 Tópicos em CG III Visualização de Modelos Massivos Prof. Alberto Raposo Tecgraf / DI / PUC-Rio Aula 02 Visibility for Walkthrough Applications Livro Real-Time Massive Model Rendering Sung-eui
Determinação de Superfícies Visíveis
 Determinação de Superfícies Visíveis 35T56 Sala 3E3 Bruno Motta de Carvalho DIMAp Sala 15 Ramal 227 1 Raytracing O raytracing automaticamente incorpora a determinação de superfícies visíveis na sua execução
Determinação de Superfícies Visíveis 35T56 Sala 3E3 Bruno Motta de Carvalho DIMAp Sala 15 Ramal 227 1 Raytracing O raytracing automaticamente incorpora a determinação de superfícies visíveis na sua execução
TRATAMENTO EFICIENTE DE VISIBILIDADE ATRAVÉS DE ÁRVORES DE VOLUMES ENVOLVENTES. Mauricio Hofmam
 TRATAMENTO EFICIENTE DE VISIBILIDADE ATRAVÉS DE ÁRVORES DE VOLUMES ENVOLVENTES Mauricio Hofmam Objetivo Apresentar um estudo do uso de volumes envolventes para determinar os conjuntos de polígonos potencialmente
TRATAMENTO EFICIENTE DE VISIBILIDADE ATRAVÉS DE ÁRVORES DE VOLUMES ENVOLVENTES Mauricio Hofmam Objetivo Apresentar um estudo do uso de volumes envolventes para determinar os conjuntos de polígonos potencialmente
Visualização de terrenos em GPU
 Visualização de terrenos em GPU Leonardo Martins { lmartins@inf.puc-rio.br} Disciplina: Visualização de Modelos Massivos Professor: Alberto Raposo Sumário Introdução Objetivos Visão geral Hierarquia de
Visualização de terrenos em GPU Leonardo Martins { lmartins@inf.puc-rio.br} Disciplina: Visualização de Modelos Massivos Professor: Alberto Raposo Sumário Introdução Objetivos Visão geral Hierarquia de
2 Algoritmos de Visibilidade
 2 Algoritmos de Visibilidade Este capítulo vai fazer uma rápida revisão em cima dos principais algoritmos de determinação de visibilidade, classificando-os segundo [14]. Também será identificada no pipeline
2 Algoritmos de Visibilidade Este capítulo vai fazer uma rápida revisão em cima dos principais algoritmos de determinação de visibilidade, classificando-os segundo [14]. Também será identificada no pipeline
Introdução ao Processamento e Síntese de imagens -Linhas e superfícies escondidas
 Introdução ao Processamento e Síntese de imagens -Linhas e superfícies escondidas Júlio Kiyoshi Hasegawa 26 Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Introdução Linhas e superfícies
Introdução ao Processamento e Síntese de imagens -Linhas e superfícies escondidas Júlio Kiyoshi Hasegawa 26 Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Introdução Linhas e superfícies
5 Resultados. 5.1 Modelos usados nos testes
 60 5 Resultados Neste capítulo serão apresentados dados recolhidos sobre os modelos gerados em pré-processamento. A seguir, serão apresentados os testes realizados para verificar o desempenho do visualizador.
60 5 Resultados Neste capítulo serão apresentados dados recolhidos sobre os modelos gerados em pré-processamento. A seguir, serão apresentados os testes realizados para verificar o desempenho do visualizador.
Visualização de terrenos em GPU
 Visualização de terrenos em GPU Leonardo Martins { lmartins@inf.puc-rio.br} Disciplina: Visualização de Modelos Massivos Professor: Alberto Raposo Sumário Introdução Objetivos Visão geral Hierarquia de
Visualização de terrenos em GPU Leonardo Martins { lmartins@inf.puc-rio.br} Disciplina: Visualização de Modelos Massivos Professor: Alberto Raposo Sumário Introdução Objetivos Visão geral Hierarquia de
3.1 Linha de Produção Utilizada
 3 Linha de Produção Gráfica Distribuída Neste capítulo, é proposta uma extensão à linha de produção gráfica convencional (graphics pipeline) destinada à renderização distribuída. Esta apresentação inclui
3 Linha de Produção Gráfica Distribuída Neste capítulo, é proposta uma extensão à linha de produção gráfica convencional (graphics pipeline) destinada à renderização distribuída. Esta apresentação inclui
vértices dessas células. Exemplos de malhas estruturadas e não-estruturadas são apresentados na Figura 2.
 1 Introdução O termo visualização corresponde, no contexto desta dissertação, aos métodos que permitem a extração de informações relevantes a partir de conjuntos de dados complexos, com o auxílio de técnicas
1 Introdução O termo visualização corresponde, no contexto desta dissertação, aos métodos que permitem a extração de informações relevantes a partir de conjuntos de dados complexos, com o auxílio de técnicas
Remoção de Superfícies Escondidas
 INF 66 Computação Gráfica Interativa Eliminação de Superfícies Escondidas; Anti-Aliasing Alberto B. Raposo abraposo@tecgraf.puc-rio.br http://www.tecgraf.puc-rio.br/~abraposo/inf66/index.htm Remoção de
INF 66 Computação Gráfica Interativa Eliminação de Superfícies Escondidas; Anti-Aliasing Alberto B. Raposo abraposo@tecgraf.puc-rio.br http://www.tecgraf.puc-rio.br/~abraposo/inf66/index.htm Remoção de
INF 1366 Computação Gráfica Interativa. Anti-Aliasing; Eliminação de Superfícies Escondidas. Alberto B. Raposo
 INF 66 Computação Gráfica Interativa Anti-Aliasing; Eliminação de Superfícies Escondidas Alberto B. Raposo abraposo@tecgraf.puc-rio.br http://www.tecgraf.puc-rio.br/~abraposo/inf66/index.htm Aliasing ACM
INF 66 Computação Gráfica Interativa Anti-Aliasing; Eliminação de Superfícies Escondidas Alberto B. Raposo abraposo@tecgraf.puc-rio.br http://www.tecgraf.puc-rio.br/~abraposo/inf66/index.htm Aliasing ACM
O Problema de Visibilidade. Computação Gráfica Recorte. Onde Acontece? O que é Recorte? Renato Ferreira
 O Problema de Visibilidade Computação Gráfica Recorte Renato Ferreira Numa cena tri-dimensional, normalmente não é possível ver todas as superfícies de todos os objetos Queremos descartar objetos ou partes
O Problema de Visibilidade Computação Gráfica Recorte Renato Ferreira Numa cena tri-dimensional, normalmente não é possível ver todas as superfícies de todos os objetos Queremos descartar objetos ou partes
Introdução à Computação Gráfica Visibilidade. Claudio Esperança Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Visibilidade Claudio Esperança Paulo Roma Cavalcanti O Problema de Visibilidade Numa cena tri-dimensional, normalmente, não é possível ver todas as superfícies de todos
Introdução à Computação Gráfica Visibilidade Claudio Esperança Paulo Roma Cavalcanti O Problema de Visibilidade Numa cena tri-dimensional, normalmente, não é possível ver todas as superfícies de todos
Frustum Culling Híbrido Utilizando CPU e GPU. Aluno: Eduardo Telles Carlos Orientador: Alberto Raposo Co-Orientador: Marcelo Gattass
 Frustum Culling Híbrido Utilizando CPU e GPU Aluno: Eduardo Telles Carlos Orientador: Alberto Raposo Co-Orientador: Marcelo Gattass Agenda Objetivos Motivação Algoritmos de visibilidade Frustum Culling
Frustum Culling Híbrido Utilizando CPU e GPU Aluno: Eduardo Telles Carlos Orientador: Alberto Raposo Co-Orientador: Marcelo Gattass Agenda Objetivos Motivação Algoritmos de visibilidade Frustum Culling
5 Resultados e Aplicações
 5 Resultados e Aplicações Os principais resultados desta pesquisa são apresentados neste capítulo, divididos em duas partes. A Seção 5.1 aborda a geração de ADFs utilizando a representação proposta nos
5 Resultados e Aplicações Os principais resultados desta pesquisa são apresentados neste capítulo, divididos em duas partes. A Seção 5.1 aborda a geração de ADFs utilizando a representação proposta nos
Introdução. 1 Introdução
 Introdução 1 Introdução O efeito visual de sombras em uma cena 3D é muito enriquecedor. Sem ele, quando a imagem é projetada na tela bidimensional do computador para visualização, perdem-se informações
Introdução 1 Introdução O efeito visual de sombras em uma cena 3D é muito enriquecedor. Sem ele, quando a imagem é projetada na tela bidimensional do computador para visualização, perdem-se informações
Visibilidade. Licenciatura em Engenharia Informática e de Computadores Computação Gráfica. Edward Angel, Cap. 7 Apontamentos CG
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Visibilidade Edward Angel, Cap. 7 Apontamentos CG Pipeline de Visualização 3D Pipeline de Visualização 3D LEIC CG Sombreamento
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Visibilidade Edward Angel, Cap. 7 Apontamentos CG Pipeline de Visualização 3D Pipeline de Visualização 3D LEIC CG Sombreamento
Rendering de Polígonos. Determinação de Superfícies Visíveis. Back Face Culling. Back Face Culling. Back Face Culling. Back Face Culling.
 Determinação de Superfícies Visíveis M.C.F. de Oliveira Fontes: Hearn & Baker, Cap. 9 Curso CG, University of Leeds (Ken Brodlie): http://www.comp.leeds.ac.uk/kwb/gi21/lectures.html Rendering de Polígonos
Determinação de Superfícies Visíveis M.C.F. de Oliveira Fontes: Hearn & Baker, Cap. 9 Curso CG, University of Leeds (Ken Brodlie): http://www.comp.leeds.ac.uk/kwb/gi21/lectures.html Rendering de Polígonos
Os testes foram efetuados em um processador Intel i7 de 2.8 GHz com 12Gb de memória RAM utilizando uma Nvidia GeForce GTX 480.
 4 Resultados O método proposto foi implementado em C++ usando OpenGL e a linguagem de Shader GLSL. A partir da implementação corrente foram realizados diversos testes visando quantificar o desempenho e
4 Resultados O método proposto foi implementado em C++ usando OpenGL e a linguagem de Shader GLSL. A partir da implementação corrente foram realizados diversos testes visando quantificar o desempenho e
5 Frustum culling em GPU
 5 Frustum culling em GPU 5.1 Timeline gpu Dois dos pioneiros na área de computação gráfica foram os professores da universidade de Utah, David Evans e Ivan Sutherland, que formaram uma empresa em 1968
5 Frustum culling em GPU 5.1 Timeline gpu Dois dos pioneiros na área de computação gráfica foram os professores da universidade de Utah, David Evans e Ivan Sutherland, que formaram uma empresa em 1968
Teoria dos Grafos Aula 6
 Teoria dos Grafos Aula 6 Aula passada Busca em grafos Busca em largura (BFS Breadth First Search) Propriedades Aula de hoje BFS implementação Complexidade Busca em profundidade (DFS) Conectividade, componentes
Teoria dos Grafos Aula 6 Aula passada Busca em grafos Busca em largura (BFS Breadth First Search) Propriedades Aula de hoje BFS implementação Complexidade Busca em profundidade (DFS) Conectividade, componentes
5 Resultados Experimentais
 5 Resultados Experimentais Neste capítulo são apresentados os resultados dos experimentos elaborados para validar a linha de produção gráfica distribuída e os algoritmos propostos para melhorar o desempenho
5 Resultados Experimentais Neste capítulo são apresentados os resultados dos experimentos elaborados para validar a linha de produção gráfica distribuída e os algoritmos propostos para melhorar o desempenho
INF2610 Renderização em Tempo Real. Waldemar Celes. 23 de Março de 2017
 Pipeline gráfico INF2610 Renderização em Tempo Real Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 23 de Março de 2017 W. Celes Pipeline gráfico 1 Sistemas Gráficos Sistemas híbridos,
Pipeline gráfico INF2610 Renderização em Tempo Real Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 23 de Março de 2017 W. Celes Pipeline gráfico 1 Sistemas Gráficos Sistemas híbridos,
Apresentação Parcial 2: The Occlusion Spectrum for Volume Classification and Visualization
 Apresentação Parcial 2: The Occlusion Spectrum for Volume Classification and Visualization Fábio Markus Nunes Miranda fmiranda@tecgraf.puc-rio.br fabiom@gmail.com Visualização de Modelos Massivos (INF2063)
Apresentação Parcial 2: The Occlusion Spectrum for Volume Classification and Visualization Fábio Markus Nunes Miranda fmiranda@tecgraf.puc-rio.br fabiom@gmail.com Visualização de Modelos Massivos (INF2063)
6 Resultados Estratégias Consideradas
 Resultados 38 6 Resultados Este capítulo mostra algumas estratégias consideradas antes de chegarmos ao sistema proposto, mostra também os resultados obtidos ilustrados por diversos experimentos computacionais,
Resultados 38 6 Resultados Este capítulo mostra algumas estratégias consideradas antes de chegarmos ao sistema proposto, mostra também os resultados obtidos ilustrados por diversos experimentos computacionais,
Exploração da Remoção Hierárquica por Oclusão em Simulações em Tempo Real
 Exploração da Remoção Hierárquica por Oclusão em Simulações em Tempo Real Vítor Cunha Miguel Leitão DEE/ISEP Av. Dr. António Bernardino de Almeida, Porto, Portugal {vrc,jml}@isep.ipp.pt Resumo As aplicações
Exploração da Remoção Hierárquica por Oclusão em Simulações em Tempo Real Vítor Cunha Miguel Leitão DEE/ISEP Av. Dr. António Bernardino de Almeida, Porto, Portugal {vrc,jml}@isep.ipp.pt Resumo As aplicações
Computação Gráfica e Áreas Correlatas
 INF 1366 Computação Gráfica Interativa Grafos de Cena Alberto B. Raposo abraposo@tecgraf.puc-rio.br http://www.tecgraf.puc-rio.br/~abraposo/inf1366 Computação Gráfica e Áreas Correlatas processamento de
INF 1366 Computação Gráfica Interativa Grafos de Cena Alberto B. Raposo abraposo@tecgraf.puc-rio.br http://www.tecgraf.puc-rio.br/~abraposo/inf1366 Computação Gráfica e Áreas Correlatas processamento de
Pipeline de Visualização 3D
 Pipeline de Visualização 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Processo de Visualização https://www.youtube.com/watch?v=ogqam2mykng Processo de
Pipeline de Visualização 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Processo de Visualização https://www.youtube.com/watch?v=ogqam2mykng Processo de
Apresentação Final: The Occlusion Spectrum for Volume Classification and Visualization
 Apresentação Final: The Occlusion Spectrum for Volume Classification and Visualization Fábio Markus Nunes Miranda fmiranda@tecgraf.puc-rio.br fabiom@gmail.com Visualização de Modelos Massivos (INF2063)
Apresentação Final: The Occlusion Spectrum for Volume Classification and Visualization Fábio Markus Nunes Miranda fmiranda@tecgraf.puc-rio.br fabiom@gmail.com Visualização de Modelos Massivos (INF2063)
Modelagem Geométrica. André Tavares da Silva. Capítulo 12 do Foley Capítulo 4 de Azevedo e Conci Capítulo 11 de Mortenson
 Modelagem Geométrica André Tavares da Silva andre.silva@udesc.br Capítulo 12 do Foley Capítulo 4 de Azevedo e Conci Capítulo 11 de Mortenson Representações Decomposição Espacial Quadtrees Octrees BSPtree
Modelagem Geométrica André Tavares da Silva andre.silva@udesc.br Capítulo 12 do Foley Capítulo 4 de Azevedo e Conci Capítulo 11 de Mortenson Representações Decomposição Espacial Quadtrees Octrees BSPtree
O Problema da Colisão. Profa. Dra. Soraia Raupp Musse
 O Problema da Colisão Profa. Dra. Soraia Raupp Musse Porque tratar a colisão? Necessidade de repetir fenômenos físicos prevendo penetrações geométricas Objetivo Encontrar as interferências geométricas
O Problema da Colisão Profa. Dra. Soraia Raupp Musse Porque tratar a colisão? Necessidade de repetir fenômenos físicos prevendo penetrações geométricas Objetivo Encontrar as interferências geométricas
INF 1771 Inteligência Artificial
 INF 1771 Inteligência Artificial Aula 20 Waypoints e Pathfinding Edirlei Soares de Lima Introdução Locomover-se no espaço do jogo é uma ação fundamental dos NPCs em qualquer gênero
INF 1771 Inteligência Artificial Aula 20 Waypoints e Pathfinding Edirlei Soares de Lima Introdução Locomover-se no espaço do jogo é uma ação fundamental dos NPCs em qualquer gênero
5 Comparação e Resultados
 5 Comparação e Resultados Neste capítulo, são apresentados e comparados os resultados obtidos com os algoritmos discutidos ao longo desta dissertação. Os testes foram realizados com as seguintes implementações:
5 Comparação e Resultados Neste capítulo, são apresentados e comparados os resultados obtidos com os algoritmos discutidos ao longo desta dissertação. Os testes foram realizados com as seguintes implementações:
Algoritmos de Visibilidade. Computação Gráfica Visibilidade. Backface Culling. Outras abordagens. Renato Ferreira
 Algoritmos de Visibilidade Computação Gráfica Visibilidade Renato Ferreira Dado um conjunto de objetos em uma cena D, determinar o que precisa ser desenhado Visibilidade é um problema complexo w Duas abordagens
Algoritmos de Visibilidade Computação Gráfica Visibilidade Renato Ferreira Dado um conjunto de objetos em uma cena D, determinar o que precisa ser desenhado Visibilidade é um problema complexo w Duas abordagens
Visibilidade. Apontamentos CG + Edward Angel, Sec Instituto Superior Técnico Computação Gráfica 2009/2010
 Visibilidade Apontamentos CG + Edward Angel, Sec. 7.11 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na últimas aulas Rasterização Discretização de linhas Preenchimento de polígonos Aliasing
Visibilidade Apontamentos CG + Edward Angel, Sec. 7.11 Instituto Superior Técnico Computação Gráfica 2009/2010 1 Na últimas aulas Rasterização Discretização de linhas Preenchimento de polígonos Aliasing
3 Fundamentos. 3.1 Pipeline de renderização em OpenGL
 3 Fundamentos Este capítulo apresenta uma visão geral do pipeline de renderização da versão 4.0 da API OpenGL, tendo como foco os recém-introduzidos estágios de tesselação. Em seguida, é realizada uma
3 Fundamentos Este capítulo apresenta uma visão geral do pipeline de renderização da versão 4.0 da API OpenGL, tendo como foco os recém-introduzidos estágios de tesselação. Em seguida, é realizada uma
Survey de técnicas. detalhadas: Análise e Comparação
 Survey para Survey de técnicas técnicas para simulação de malhas malhas simulação de detalhadas: detalhadas: Análise Comparação Análise e Comparação bpevangelista@gmail.com bpevangelista@gmail.com Orientador:
Survey para Survey de técnicas técnicas para simulação de malhas malhas simulação de detalhadas: detalhadas: Análise Comparação Análise e Comparação bpevangelista@gmail.com bpevangelista@gmail.com Orientador:
5 Implementação e resultados
 Implementação e resultados 5 Implementação e resultados Nesta seção, apresentamos alguns detalhes de implementação das diferentes técnicas investigadas e comparamos os resultados obtidos em termos de facilidade
Implementação e resultados 5 Implementação e resultados Nesta seção, apresentamos alguns detalhes de implementação das diferentes técnicas investigadas e comparamos os resultados obtidos em termos de facilidade
Renderização Interativa em Dispositivos Móveis Utilizando Algoritmos de Visibilidade e Estruturas de Particionamento Espacial
 FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA UNIFOR Renderização Interativa em Dispositivos Móveis Utilizando Algoritmos de Visibilidade e Estruturas de Particionamento Espacial Wendel Bezerra Silva
FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA UNIFOR Renderização Interativa em Dispositivos Móveis Utilizando Algoritmos de Visibilidade e Estruturas de Particionamento Espacial Wendel Bezerra Silva
AdaptiveShadowMaps. Randima Fernando Sebastian Fernandez Kavita Bala Donald P. Greenberg Apresentado por Claudio Esperança
 AdaptiveShadowMaps Randima Fernando Sebastian Fernandez Kavita Bala Donald P. Greenberg Apresentado por Claudio Esperança Sombras Problema consiste em saber, para cada fonte de luz, quais áreas da cena
AdaptiveShadowMaps Randima Fernando Sebastian Fernandez Kavita Bala Donald P. Greenberg Apresentado por Claudio Esperança Sombras Problema consiste em saber, para cada fonte de luz, quais áreas da cena
3 Modelo de Reservatórios Naturais de Petróleo
 3 Modelo de Reservatórios Naturais de Petróleo Nesse capítulo é feita uma breve apresentação do que é um modelo de reservatório natural de petróleo, os resultados associados a uma simulação desse modelo
3 Modelo de Reservatórios Naturais de Petróleo Nesse capítulo é feita uma breve apresentação do que é um modelo de reservatório natural de petróleo, os resultados associados a uma simulação desse modelo
Introdução Introdução
 Introdução 19 1. Introdução A criação de imagens realísticas de cenas naturais é um dos maiores desafios para a área de computação gráfica, tanto para a computação científica, quanto para a indústria de
Introdução 19 1. Introdução A criação de imagens realísticas de cenas naturais é um dos maiores desafios para a área de computação gráfica, tanto para a computação científica, quanto para a indústria de
Algoritmos de Iluminação Global
 Sistemas Gráficos/ Computação Gráfica e Interfaces 1 Objetivo: calcular a cor de cada ponto a partir da iluminação direta de uma fonte de luz, mais a soma de todas as reflexões das superfícies próximas.
Sistemas Gráficos/ Computação Gráfica e Interfaces 1 Objetivo: calcular a cor de cada ponto a partir da iluminação direta de uma fonte de luz, mais a soma de todas as reflexões das superfícies próximas.
Introdução ao Processamento e Síntese de imagens Recorte 2D
 1 Introdução ao Processamento e Síntese de imagens Recorte 2D Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Traina, A. J. M. & Oliveira, M. C. F. (2004) 2016 2 Recorte - (Clipping) Numa
1 Introdução ao Processamento e Síntese de imagens Recorte 2D Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Traina, A. J. M. & Oliveira, M. C. F. (2004) 2016 2 Recorte - (Clipping) Numa
3 Visualização de TetraQuads
 3 Visualização de TetraQuads No capítulo anterior vimos como é definido uma malha de TetraQuads. Iremos agora descobrir como visualizar essa malha utilizando uma adaptação do algoritmo de ra casting para
3 Visualização de TetraQuads No capítulo anterior vimos como é definido uma malha de TetraQuads. Iremos agora descobrir como visualizar essa malha utilizando uma adaptação do algoritmo de ra casting para
Computação Gráfica - 12
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 12 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Realismo
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 12 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Realismo
Determinação da Visibilidade
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Determinação da Visibilidade Beatriz Sousa Santos, J. Madeira Uma classificação Os métodos de visibilidade podem ser basicamente
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Determinação da Visibilidade Beatriz Sousa Santos, J. Madeira Uma classificação Os métodos de visibilidade podem ser basicamente
Redes Complexas Aula 13
 Redes Complexas Aula 13 Aula passada Experimento de Milgram Modelo Small World Propriedades estruturais Aula de hoje Busca em redes Explorando estrutura Navegação em redes Algoritmo eficiente e estrutura
Redes Complexas Aula 13 Aula passada Experimento de Milgram Modelo Small World Propriedades estruturais Aula de hoje Busca em redes Explorando estrutura Navegação em redes Algoritmo eficiente e estrutura
Visibilidade. Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro
 Visibilidade Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro 1 As motivações Numa cena 3D, geralmente não é possível ver todas as superfícies de todos os objectos Não queremos que
Visibilidade Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro 1 As motivações Numa cena 3D, geralmente não é possível ver todas as superfícies de todos os objectos Não queremos que
Fundamentos de Computação Gráfica. Visualização e Navegação em Tempo Real
 Fundamentos de Computação Gráfica Visualização e Navegação em Tempo Real O Problema: Triângulos! buda: 1 milhão Terreno: 1.3 milhões central: 13 milhões Terreno: 512 milhões Terreno: 16 milhões Terra:
Fundamentos de Computação Gráfica Visualização e Navegação em Tempo Real O Problema: Triângulos! buda: 1 milhão Terreno: 1.3 milhões central: 13 milhões Terreno: 512 milhões Terreno: 16 milhões Terra:
Fundamentos da Computação Gráfica Lista de Exercícios Marcelo Gattass TeCGraf/Departamento de Informática/PUC-Rio 19jun2003
 Fundamentos da Computação Gráfica Lista de Exercícios Marcelo Gattass TeCGraf/Departamento de Informática/PUC-Rio 19jun2003 I. Introdução 1) Qual a diferença entre Processamento de Imagens, Visão Computacional
Fundamentos da Computação Gráfica Lista de Exercícios Marcelo Gattass TeCGraf/Departamento de Informática/PUC-Rio 19jun2003 I. Introdução 1) Qual a diferença entre Processamento de Imagens, Visão Computacional
Visualização Distribuída utilizando Agrupamentos de PCs 10
 1 Introdução Sistemas de visualização vêm sendo utilizados em diversas áreas da indústria e do campo científico. Dentre essas áreas, CAD (Computer Aided Design), visualização científica e realidade virtual
1 Introdução Sistemas de visualização vêm sendo utilizados em diversas áreas da indústria e do campo científico. Dentre essas áreas, CAD (Computer Aided Design), visualização científica e realidade virtual
Renderização Interativa em Dispositivos Móveis utilizando Algoritmos de Visibilidade e Estruturas de Particionamento Espacial
 Renderização Interativa em Dispositivos Móveis utilizando Algoritmos de Visibilidade e Estruturas de Particionamento Espacial Wendel B. Silva 1, Maria Andréia F. Rodrigues (orientadora do mestrado) 2 ¹Bolsista
Renderização Interativa em Dispositivos Móveis utilizando Algoritmos de Visibilidade e Estruturas de Particionamento Espacial Wendel B. Silva 1, Maria Andréia F. Rodrigues (orientadora do mestrado) 2 ¹Bolsista
Operações Booleanas na Modelagem por Pontos
 Operações Booleanas na Modelagem por Pontos Heloisa Reis Leal 1, Waldemar Celes 2, Luiz Velho 1 1 IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina, 110 22460-320 Rio de Janeiro, RJ 2
Operações Booleanas na Modelagem por Pontos Heloisa Reis Leal 1, Waldemar Celes 2, Luiz Velho 1 1 IMPA Instituto de Matemática Pura e Aplicada Estrada Dona Castorina, 110 22460-320 Rio de Janeiro, RJ 2
INF 2063 Tópicos em CG III
 INF 2063 Tópicos em CG III Visualização de Modelos Massivos Prof. Alberto Raposo Tecgraf / DI / PUC-Rio Aula 04 Representações Alternativas Livro 1. Introdução 2. Visibilidade 3. Simplificação e Níveis
INF 2063 Tópicos em CG III Visualização de Modelos Massivos Prof. Alberto Raposo Tecgraf / DI / PUC-Rio Aula 04 Representações Alternativas Livro 1. Introdução 2. Visibilidade 3. Simplificação e Níveis
IMPLEMENTAÇÃO E OTIMIZAÇÃO DE UMA BOUNDING INTERVAL HIERARCHY PARA UM RAYTRACER DE TEMPO REAL USANDO CUDA
 UNIVERSIDADE FEDERAL DE PERNAMBUCO GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CENTRO DE INFORMÁTICA IMPLEMENTAÇÃO E OTIMIZAÇÃO DE UMA BOUNDING INTERVAL HIERARCHY PARA UM RAYTRACER DE TEMPO REAL USANDO CUDA Proposta
UNIVERSIDADE FEDERAL DE PERNAMBUCO GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CENTRO DE INFORMÁTICA IMPLEMENTAÇÃO E OTIMIZAÇÃO DE UMA BOUNDING INTERVAL HIERARCHY PARA UM RAYTRACER DE TEMPO REAL USANDO CUDA Proposta
5HSUHVHQWDomRGRVFHQiULRV
 5HSUHVHQWDomRGRVFHQiULRV Um importante passo no modelagem determinística do canal de rádio é ter um esquema eficiente para representar os componentes do cenário numa base de dados, de forma a poder achar
5HSUHVHQWDomRGRVFHQiULRV Um importante passo no modelagem determinística do canal de rádio é ter um esquema eficiente para representar os componentes do cenário numa base de dados, de forma a poder achar
Uma Nova Solução para Visibility Culling de Cenas Genéricas, baseada em Replicação, Heurísticas e Redução de Draw Calls
 Uma Nova Solução para Visibility Culling de Cenas Genéricas, baseada em Replicação, Heurísticas e Redução de Draw Calls Yvens R. Serpa 1, Mária Andréia F. Rodrigues (Orientadora) 1 1 Programa de Pós-Graduação
Uma Nova Solução para Visibility Culling de Cenas Genéricas, baseada em Replicação, Heurísticas e Redução de Draw Calls Yvens R. Serpa 1, Mária Andréia F. Rodrigues (Orientadora) 1 1 Programa de Pós-Graduação
Bruno Pereira Evangelista. Pontifícia Universidade Católica de Minas Gerais
 Bruno Pereira Evangelista Pontifícia Universidade Católica de Minas Gerais 2/60 Apresentação Introdução Pipeline de renderização Efeitos utilizando GPUs Shaders Como utilizar shaders Ferramentas Demos
Bruno Pereira Evangelista Pontifícia Universidade Católica de Minas Gerais 2/60 Apresentação Introdução Pipeline de renderização Efeitos utilizando GPUs Shaders Como utilizar shaders Ferramentas Demos
Figura 4.1: Organização de hardware da nossa solução.
 4 Visualização Distribuída Uma das estratégias para o tratamento de problemas similares de visualização de modelos de larga escala tem sido empregar agrupamentos de PCs de prateleira (off-the-shelf PC
4 Visualização Distribuída Uma das estratégias para o tratamento de problemas similares de visualização de modelos de larga escala tem sido empregar agrupamentos de PCs de prateleira (off-the-shelf PC
Sumário. Introdução Câmera sintética Window-to-Viewport Exercício. 29-May-13 Leandro Tonietto!2
 Câmera Sintética Leandro Tonietto Computação Gráfica Desenvolvimento Jogos e Entretenimento Digital ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/pgr/camerasintetica.pdf 05-13 29-May-13
Câmera Sintética Leandro Tonietto Computação Gráfica Desenvolvimento Jogos e Entretenimento Digital ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/pgr/camerasintetica.pdf 05-13 29-May-13
Processamento de Imagens. Segmentação por regiões
 Processamento de Imagens Segmentação por regiões Inúmeros Métodos Clusterização Baseados em histograma Detecção de bordas Crescimento de regiões Level Set Particionamento de grafos Watershed Baseados em
Processamento de Imagens Segmentação por regiões Inúmeros Métodos Clusterização Baseados em histograma Detecção de bordas Crescimento de regiões Level Set Particionamento de grafos Watershed Baseados em
Geração Procedural de Terrenos em GPU
 Geração Procedural de Terrenos em GPU Felipe Gomes Sampaio Universidade Federal de Juiz de Fora Departamento de Ciência da Computação Orientadora: Jesuliana Nascimento Ulysses Agenda Introdução GPU Terrenos
Geração Procedural de Terrenos em GPU Felipe Gomes Sampaio Universidade Federal de Juiz de Fora Departamento de Ciência da Computação Orientadora: Jesuliana Nascimento Ulysses Agenda Introdução GPU Terrenos
Objetos Gráficos Planares
 Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Planares Prof. Thales Vieira 2011 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Planares Prof. Thales Vieira 2011 Objetos Gráficos Computação Gráfica é a área que estuda a síntese, o processamento e a análise
5 Resultados Experimentais
 5 Resultados Experimentais Neste capítulo são apresentados alguns testes realizados tendo em vista julgar a aplicação desenvolvida em algumas das situações em que ela possa vir a ser utilizada, assim como
5 Resultados Experimentais Neste capítulo são apresentados alguns testes realizados tendo em vista julgar a aplicação desenvolvida em algumas das situações em que ela possa vir a ser utilizada, assim como
Renderização não fotorealista
 Renderização não fotorealista INF1339 Computação Gráfica Tridimensional Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 7 de Outubro de 2015 W. Celes Renderização não fotorealista
Renderização não fotorealista INF1339 Computação Gráfica Tridimensional Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 7 de Outubro de 2015 W. Celes Renderização não fotorealista
4 Implementação em CPU
 4 Implementação em CPU Este capítulo tem por finalidade avaliar os algoritmos e técnicas de aceleração levantadas anteriormente, a fim de obter a melhor combinação entre eles avaliando o desempenho conseguido
4 Implementação em CPU Este capítulo tem por finalidade avaliar os algoritmos e técnicas de aceleração levantadas anteriormente, a fim de obter a melhor combinação entre eles avaliando o desempenho conseguido
Objetos definidos no seu próprio sistema de coordenadas
 Transformações Modelagem Iluminação (Shading) Transformação Câmera A história até aqui Recorte Projeção Rasterização Visibilidade Transformações Modelagem Iluminação (Shading) Transformação Câmera Recorte
Transformações Modelagem Iluminação (Shading) Transformação Câmera A história até aqui Recorte Projeção Rasterização Visibilidade Transformações Modelagem Iluminação (Shading) Transformação Câmera Recorte
Introdução. Motivação Silhuetas são um importante instrumento para análise e visualização de dados.
 Introdução Mulher Visível: 512 3 Motivação Silhuetas são um importante instrumento para análise e visualização de dados. Desafios Linhas não-visíveis podem comprometer a interpretação. A remoção das linhas
Introdução Mulher Visível: 512 3 Motivação Silhuetas são um importante instrumento para análise e visualização de dados. Desafios Linhas não-visíveis podem comprometer a interpretação. A remoção das linhas
INF1339 Computação Gráfica Tridimensional. Waldemar Celes. 2 de Agosto de 2010
 Sistemas Gráficos INF1339 Computação Gráfica Tridimensional Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 2 de Agosto de 2010 W. Celes Sistemas Gráficos 1 Visualização 3D Objetivo
Sistemas Gráficos INF1339 Computação Gráfica Tridimensional Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 2 de Agosto de 2010 W. Celes Sistemas Gráficos 1 Visualização 3D Objetivo
4 Resultados. Tabela 4.1: Funções implícitas de teste.
 4 Resultados Neste Capítulo serão discutidos os resultados obtidos. Todas as imagens têm realçados os pontos no bordo do domínio e os da silhueta, e as variedades são iluminadas com uma única fonte de
4 Resultados Neste Capítulo serão discutidos os resultados obtidos. Todas as imagens têm realçados os pontos no bordo do domínio e os da silhueta, e as variedades são iluminadas com uma única fonte de
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Definições preliminares 06/09/2015
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Definições preliminares 06/09/2015
Computação Gráfica. Representação e Modelagem
 Computação Gráfica Representação e Modelagem Professora: Sheila Cáceres Baseado nos slides da Prof. Soraia Musse Modelagem Área da Computação Gráfica que estuda a criação de modelos dos objetos reais.
Computação Gráfica Representação e Modelagem Professora: Sheila Cáceres Baseado nos slides da Prof. Soraia Musse Modelagem Área da Computação Gráfica que estuda a criação de modelos dos objetos reais.
Interseções de Segmentos de Linha João Comba. Sobreposição de Mapas Temáticos
 Interseções de Segmentos de Linha João Comba Sobreposição de Mapas Temáticos Mapas temáticos Segmentos curvos aproximados por vários segmentos de linha Problema de Sobreposição (Overlay): Dados dois conjuntos
Interseções de Segmentos de Linha João Comba Sobreposição de Mapas Temáticos Mapas temáticos Segmentos curvos aproximados por vários segmentos de linha Problema de Sobreposição (Overlay): Dados dois conjuntos
de petróleo. Um novo domínio chamado computação de propósito geral em processadores gráficos (GPGPU) surgiu quando os pipelines de gráficos de
 surgiu quando os pipelines de gráficos de") 12 1 1.1. Motivações Dentre os tipos de técnicas de Inteligência Artificial existentes, as técnicas de Programação Genética (PG) continuam mudando rapidamente conforme os pesquisadores e profissionais
12 1 1.1. Motivações Dentre os tipos de técnicas de Inteligência Artificial existentes, as técnicas de Programação Genética (PG) continuam mudando rapidamente conforme os pesquisadores e profissionais
Thanks to Isabel Harb Manssour Marcelo Cohen
 Thanks to Isabel Harb Manssour Marcelo Cohen Roteiro 1. Introdução 2. Remoção de Faces Traseiras 3. Algoritmo do Pintor 4. Algoritmo Z-Buffer 5. Árvores BSP Introdução Eliminação de superfícies escondidas
Thanks to Isabel Harb Manssour Marcelo Cohen Roteiro 1. Introdução 2. Remoção de Faces Traseiras 3. Algoritmo do Pintor 4. Algoritmo Z-Buffer 5. Árvores BSP Introdução Eliminação de superfícies escondidas
ÁRVORES E ÁRVORE BINÁRIA DE BUSCA
 ÁRVORES E ÁRVORE BINÁRIA DE BUSCA Prof. André Backes Definição 2 Diversas aplicações necessitam que se represente um conjunto de objetos e as suas relações hierárquicas Uma árvore é uma abstração matemática
ÁRVORES E ÁRVORE BINÁRIA DE BUSCA Prof. André Backes Definição 2 Diversas aplicações necessitam que se represente um conjunto de objetos e as suas relações hierárquicas Uma árvore é uma abstração matemática
Introdução Geral a Computação Gráfica. Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de Computação Gráfica
 Introdução Geral a Computação Gráfica Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de 2 Introdução Geral a O que é CG? Áreas de Atuação Definição, Arte e Matemática Mercado
Introdução Geral a Computação Gráfica Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina de 2 Introdução Geral a O que é CG? Áreas de Atuação Definição, Arte e Matemática Mercado
Resumo. Ray Tracing. Introdução. Ray Casting Básico. Idéia
 Resumo Leandro Paganotti Brazil Danilo Medeiros Eler Rosane Minghim Computação Gráfica ICMC USP 2010 Introdução Ray Casting Básico Intersecção Raio-Cena Caminhos de Reflexão e Refração Ray-Tracing Tree
Resumo Leandro Paganotti Brazil Danilo Medeiros Eler Rosane Minghim Computação Gráfica ICMC USP 2010 Introdução Ray Casting Básico Intersecção Raio-Cena Caminhos de Reflexão e Refração Ray-Tracing Tree
Grafos: árvores geradoras mínimas. Graça Nunes
 Grafos: árvores geradoras mínimas Graça Nunes 1 Motivação Suponha que queremos construir estradas para interligar n cidades Cada estrada direta entre as cidades i e j tem um custo associado Nem todas as
Grafos: árvores geradoras mínimas Graça Nunes 1 Motivação Suponha que queremos construir estradas para interligar n cidades Cada estrada direta entre as cidades i e j tem um custo associado Nem todas as
1 Introdução. I know because I must know. It's my purpose. It's the reason I'm here. (The Matrix) 1.1 Objetivos do trabalho
 1.1 Objetivos do trabalho") 1 Introdução I know because I must know. It's my purpose. It's the reason I'm here. (The Matrix) 1.1 Objetivos do trabalho Os hardwares gráficos atualmente podem ser considerados como verdadeiros processadores
1 Introdução I know because I must know. It's my purpose. It's the reason I'm here. (The Matrix) 1.1 Objetivos do trabalho Os hardwares gráficos atualmente podem ser considerados como verdadeiros processadores
2 Conceitos Básicos e Trabalhos Relacionados
 2 Conceitos Básicos e Trabalhos Relacionados Neste capítulo apresentamos, resumidamente, alguns conceitos básicos necessários para o entendimento do trabalho. Uma descrição mais detalhada destes conceitos
2 Conceitos Básicos e Trabalhos Relacionados Neste capítulo apresentamos, resumidamente, alguns conceitos básicos necessários para o entendimento do trabalho. Uma descrição mais detalhada destes conceitos
4 Impostores com Relevo
 63 4 Impostores com Relevo I just wish... I wish I knew what I'm supposed to do. That's all. I just wish I knew. (The Matrix) 4.1 Introdução Os objetos modelados por texturas com relevo, por corrigirem
63 4 Impostores com Relevo I just wish... I wish I knew what I'm supposed to do. That's all. I just wish I knew. (The Matrix) 4.1 Introdução Os objetos modelados por texturas com relevo, por corrigirem
Prof. Fernando V. Paulovich 25 de abril de SCC Computação Gráca
 Determinação de Superfícies Visíveis SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC)
Determinação de Superfícies Visíveis SCC0250 - Computação Gráca Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC)
Introdução à Computação Gráfica Visibilidade e Recorte
 Introdução à Computação Gráfica Visibilidade e Recorte Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti O Problema de Visibilidade Numa cena tridimensional,
Introdução à Computação Gráfica Visibilidade e Recorte Adaptação: Autoria: João Paulo Pereira António Costa Claudio Esperança Paulo Roma Cavalcanti O Problema de Visibilidade Numa cena tridimensional,
Detecção Hierárquica de Colisão em Ambientes 3D
 Detecção Hierárquica de Colisão em Ambientes 3D FABIO ISSAO NAKAMURA WALDEMAR CELES (orientador) Tecgraf/PUC-Rio Departamento de Informática Pontifícia Universidade Católica do Rio de Janeiro Rua Marquês
Detecção Hierárquica de Colisão em Ambientes 3D FABIO ISSAO NAKAMURA WALDEMAR CELES (orientador) Tecgraf/PUC-Rio Departamento de Informática Pontifícia Universidade Católica do Rio de Janeiro Rua Marquês
Figura 1.1: Partição do espaço contendo a esfera S.
 1 Introdução Uma superfície é definida implicitamente quando é descrita como um conjunto de pontos com uma propriedade em comum. A formulação mais utilizada é, dada uma função F : R 3! R, descrevê-la como
1 Introdução Uma superfície é definida implicitamente quando é descrita como um conjunto de pontos com uma propriedade em comum. A formulação mais utilizada é, dada uma função F : R 3! R, descrevê-la como
Leitura do dado volumétrico e construção da octree. Primeiramente, 3. Teste de visibilidade para detectar os nós visíveis da octree.
 4 Implementação da oclusão impĺıcita A implementação da oclusão implícita (12) segue, em vários aspectos, a estrutura proposta em Wilhelms e Van Gelder (14) e Livnat e Hansen (8). O algoritmo está separado
4 Implementação da oclusão impĺıcita A implementação da oclusão implícita (12) segue, em vários aspectos, a estrutura proposta em Wilhelms e Van Gelder (14) e Livnat e Hansen (8). O algoritmo está separado
CIC 111 Análise e Projeto de Algoritmos II
 CIC 111 Análise e Projeto de Algoritmos II Prof. Roberto Affonso da Costa Junior Universidade Federal de Itajubá AULA 29 Geometry Complex numbers Points and lines Polygon area Distance functions Geometry
CIC 111 Análise e Projeto de Algoritmos II Prof. Roberto Affonso da Costa Junior Universidade Federal de Itajubá AULA 29 Geometry Complex numbers Points and lines Polygon area Distance functions Geometry
4 Algoritmo de Visualização
 4 Algoritmo de Visualização Utilizar a malha completa para a visualização de um terreno pode ser impraticável no caso de terrenos muitos grandes. Por isso, precisa-se encontrar uma forma de visualizar
4 Algoritmo de Visualização Utilizar a malha completa para a visualização de um terreno pode ser impraticável no caso de terrenos muitos grandes. Por isso, precisa-se encontrar uma forma de visualizar
Introdução à Computação Gráfica. Claudio Esperança Paulo Roma Cavalcanti
 Introdução à Computação Gráfica Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Ênfase na parte prática Avaliação através de trabalhos de implementação C / C++ OpenGL c/ GLUT Grau (nota) baseado
Introdução à Computação Gráfica Claudio Esperança Paulo Roma Cavalcanti Estrutura do Curso Ênfase na parte prática Avaliação através de trabalhos de implementação C / C++ OpenGL c/ GLUT Grau (nota) baseado
Bernardo Bianchi Franceschin. Visualização de seções de corte arbitrárias de malhas não estruturadas. Dissertação de Mestrado
 Bernardo Bianchi Franceschin Visualização de seções de corte arbitrárias de malhas não estruturadas Dissertação de Mestrado Dissertação apresentada como requisito parcial para obtenção do grau de Mestre
Bernardo Bianchi Franceschin Visualização de seções de corte arbitrárias de malhas não estruturadas Dissertação de Mestrado Dissertação apresentada como requisito parcial para obtenção do grau de Mestre