Pontifícia Universidade Católica do Paraná. Centro de Ciências Exatas e de Tecnologia - CCET. Engenharia da Computação 3º Período. Susp-Down.
|
|
|
- Daniel Fragoso Sabala
- 5 Há anos
- Visualizações:
Transcrição
1 Pontifícia Universidade Católica do Paraná Centro de Ciências Exatas e de Tecnologia - CCET Engenharia da Computação 3º Período Susp-Down Curitiba 2011
2 Fabio Pinheiro de Souza Ivan Lucas Reis Silva Rodrigo Monma Lucas Susp-Down Projeto apresentado como requisito Parcial para avaliação do Programa de Aprendizagem em Física III e requisito para o programa de Aprendizagem em RPE, do Curso de Engenharia de Computação, 3º período noturno da Pontifícia Universidade Católica do Paraná, sob a Orientação dos professores Gil Marcos Jess e Afonso Ferreira Miguel. Curitiba
3 Resumo O projeto susp-down consiste em adaptar um carro de brinquedo com controle remoto a fim de alterar a suspensão original de uma forma automatizada e mais interessante. Realizado por estudantes do terceiro período do curso de Engenharia da Computação, envolvendo principalmente duas disciplinas: Física e RPE (Resolução de Problemas de Engenharia); cujo o único requisito dos coordenadores, Gil Marcos Jess e Afonso Ferreira Miguel, é que o referido projeto produza algum movimento físico. 3
4 Abstract Susp-Down design is to adapt a toy car with remote control to change the original suspension in an automated and more interesting. Perfomed by students of the third period of the course of Computer Engineering, mainly involving two subjects: Physics and EPS(Engineering Problem Solving), whose only requirement of the coordinators, Gil Marcos Jess and Afonso Ferreira Miguel, is that this project will produce some movement. 4
5 Sumário Introdução Objetivos o Geral o Específico Materiais Utilizados Descrição Geral o História do Projeto o Procedimentos Descrição Detalhada Glossário Problemas Encontrados Conclusão Fotos em Anexo
6 1. Introdução No mercado de brinquedos é comum encontrar miniaturas de carros com controle remoto que ofereça ao usuário quatro funções básicas que se baseiam na direção: acelerar, andar para trás, virar para direita e virar para a esquerda. O projeto Susp-Down vem para implementar mais uma função a esse sistema, a alteração de sua suspensão, deixando o brinquedo mais interessante e divertido. Ressaltando que essa idéia já tem sido realizada, só que de uma forma mais amadora, tendo que tirar uma das funções originais do brinquedo. Ao qual não é o que vem a ser proposto nesse projeto. 6
7 2. Objetivos o Geral Utilizando uma miniatura do carro Hummer H3T de escala 1:16, alterar a suspensão original utilizando servomotores instalados nos dois eixos de transmissão, incluindo sensores que irão monitorar a rotação de uma das rodas para indicar a sua velocidade atual e estes serão controlados pelo hardware Arduino que fará todo o processo eletronicamente. Satisfazendo as condições estabelecidas pelos coordenadores das disciplinas de Física III e RPE, em que se deve apresentar algum movimento físico. o Específicos a. Elaboração do algoritmo para o controle da suspensão; b. Instalação da roldana utiliza dano sensor de velocidade no carro; c. Adaptação do eixo traseiro para o primeiro servomotor; d. Instalação do primeiro servomotor na parte traseira do carro; e. Implementação do sensor optoacoplador que fará a função de captar a velocidade do carro; f. Fazer a programação do Arduino, integrando todas as partes que constituem a suspensão; g. Instalação do Arduino no carro; h. Adaptação do eixo dianteiro para o segundo servomotor; i. Instalação do segundo servomotor na parte frontal do carro; j. Implementação de chaves fim de curso no eixo dianteiro; 3. Materiais Utilizados a) 01 Miniatura da Hummer H3T, escala 1:16, com controle remoto; b) 01 Arduino Duemilanove; c) 02 Micro servo motores Hextronik HXT900, 09 g torque: 1,6Kg; d) 02 Mini chaves fim de curso; e) 01 sensor optoacopladortcst1000/ TCST2000; f) 02 baterias alcalinas 9V; g) Cola adesiva instantânea; h) Cola de silicone quente; i) 01 Roldana do sensor presente em mouses antigos serial (com bolinha ). 7



8 Miniatura da Hummer H3T, escala 1:16, com controle remoto. Arduino Duemilanove. Micro servo motor Hextronik HXT900, 09 g torque: 1,6Kg. 8

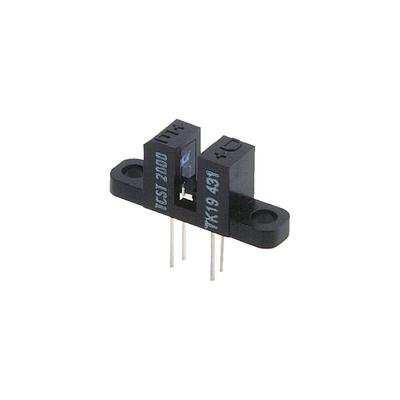
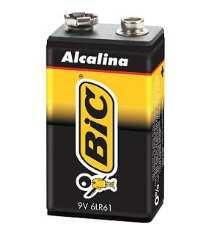
9 Mini chaves fim de curso. Sensor optoacopladortcst1000/ TCST2000. Bateria alcalina 9V. 9

10 Roldana do mouse 4. Descrição Geral História do projeto A ideia do projeto Susp-Down consiste em dois comentários dos integrantes Rodrigo e Fabio, em que o primeiro achou interessante o projeto envolver algum carro em miniatura e o segundo deu a opinião de alterar de alguma forma a suspensão desse carrinho. Essas ideias foram bem aceitas numa conversa entre a equipe, porém como não sabíamos se era possível pôr em prática, conversamos com o professor de Física III, Gil, a respeito da forma que seria implementado o movimento da suspensão no carrinho, esse disse que poderíamos utilizar servomotores. Sendo assim, colocou-se todas essas informações até então decididas no plano de trabalho, a fim de dar início às atividades do projeto Susp-Down no dia 06/04/2011. Procedimentos Durante os procedimentos no projeto, a equipe foi orientada a fazer tarefas conforme encontros semanais com o professor Afonso na disciplina de RPE (Resolução de Problemas de Engenharia). Seguiu-se o diagrama em blocos proposto no plano de trabalho: 10

11 Começamos por adaptar a mecânica original do carrinho a fim de que os dois servo motores quando instalados, façam o movimento de subida e descida. A parte da implementação do sensor de velocidade, ao que o grupo teve maiores dificuldades em decidir o que especificamente seria, primeiramente procuramos informar a respeito com professor Afonso, e nos foi indicado utilizarmos o módulo acelerômetro no Arduino, para calcular a velocidade, porém achamos que isto custaria muito para o grupo financeiramente. Posteriormente, conversamos com alunos do quarto ano no curso sobre a utilização do acelerômetro, e nos disseram que este não resolveria nosso problema devido a ocorrer muito ruído e ser uma tanto quanto complexo, já que precisaríamos apenas um dispositivo que monitorasse de alguma a rotação do motor. Foi aí, que comentaram conosco a possibilidade 11


12 de reutilizar o sensor infravermelho de mouses seriais antigos (de bolinha ), e aceitamos a sugestão. Desmontamos o mouse para obter o sensor. Depois de testes feitos no código do programa, para receber sinais vindos desse sensor, obtemos um outro sensor denominado Optoacoplador que tem a mesma função do primeiro, a diferença é que sua estrutura é mais fechada evitando interferências oriundas principalmente da luminosidade externa, para instalá-lo no projeto. Posteriormente, foi terminado a programação do arduino controlando todos os componentes envolvidos e instalado o arduino no carro: 12

13 5. Descrição Detalhada Seguindo as idéias apresentadas no plano de trabalho, demos início as atividades do projeto a partir do dia 06/04/2011. E as atividades foram divididas para cada integrante, feitas no período de uma semana. Período 06/04 a 13/04: Solução da adaptação do sensor de velocidade, elaboração do algoritmo para o controle da suspensão, solução da adaptação do eixo traseiro; Período 13/04 a 27/04: Feita a programação em C++ do arduino para o sensor de velocidade, resolvido o problema da implantação do servo motor no eixo traseiro, início da programação dos servo motores; Período 27/04 a 04/05: Concluída a programação em C++ fonte dos servo motores, implantada a suspensão traseira, início da fase de implantação da suspensão dianteira; Período 04/05 a 11/05: Implantada a suspensão dianteira, terminada a programação do arduino, iniciada a implementação do sensor de velocidade; Período 11/05 a 18/05: Implementado o sensor de velocidade, Solução do controle da suspensão por sensores fim de curso; Período 18/05 a 25/05: Instalado o arduíno no carro, implementado dois sensores fim de curso responsáveis por oferecer o controle manual da suspensão; Período 25/05 a 01/06: Feita a modificação do código do programa para os sensores fim de curso, testes finais; 13
14 6. Glossário Arduino: É um computador físico baseado numa simples plataforma de hardware livre, projetada com um microcontrolador de placa única, com suporte de entrada/saída embutido e uma linguagem de programação padrão, na qual tem origem em Wiring, e é essencialmente C/C++; Servo Motor: Servomotor é uma máquina, mecânica ou eletromecânica, que apresenta movimento proporcional a um comando, em vez de girar ou se mover livremente sem um controle mais efetivo de posição como a maioria dos motores; servomotores são dispositivos de malha fechada, ou seja: recebem um sinal de controle; verificam a posição atual; atuam no sistema indo para a posição desejada. Em contraste com os motores contínuos que giram indefinidamente, o eixo dos servo motores possui a liberdade de apenas cerca de 180º graus mas são precisos quanto a posição. Sensor Optoacoplador: Este dispositivo tem uma construção compacta, onde um diodo emissor de luz, LED, e um detector de raios infravermelhos estão localizados face-a-face no mesmo eixo óptico. O comprimento de onda de operação é de 950nm. O detector consiste de um fototransistor. Chave fim de curso: É uma chave que possui três pinos em sua estrutura, uma é o COM (comum) onde a tensão é aplicada e as outras duas fecham o circuito. Dessa forma a chave alterna por onde a corrente elétrica irá passar, entre esses dois últimos pinos. Bateria: É um tipo de gerador elétrico que através de reações químicas em seu interior produz uma diferença de potencial em Volts entre seus dois pólos, positivo e negativo. 7. Problemas Encontrados Problema Módulo acelerômetro muito caro, complexo para a função desejada e gera muito ruído. Arduino demorou aproximadamente dois meses para chegar em mãos. Solução Utilizar o sensor IR de um mouse serial. Utilizamos o arduino fornecido pela PUC-PR no laboratório de Engenharia da Computação II. 14
15 Arduino não fornecia energia suficiente para alimentar dois servo motores. Roldana do sensor do mouse, não cortava adequadamente o feixe de luz infravermelho. Aumentamos a corrente da alimentação do arduino. Adaptou-se fazendo apenas um corte maior na roldana. 8. Conclusão Diante de uma grande variedade de miniaturas de carros reais, no mercado atual de brinquedos, os usuários de modo geral se deparam com algo em comum, que são as funções básicas presentes tais como: acelerar, andar para trás, virar a direita e virar a esquerda; fatores que podem deixar o brinquedo obsoleto e até perder a graça depois de um certo tempo de uso. Esse projeto mostrou que é possível integrar mais uma função, controlar a suspensão do carro, deixando-o mais interessante. Além disso, o grupo pode adquirir uma boa experiência de projetos, envolvendo organização de idéias, tomada de decisões frente a problemas para apresentar possíveis alternativas, padronização quanto a documentos que registram informações de tal projeto, divisão de problemas maiores em menores para ficar mais eficaz sua execução, etc. 15


16 9. Fotos em Anexo Carrinho em fase de adaptação Projeto com tudo instalado faltando testes finais 16


17 Carro quase pronto faltando ajustes finais. Carro com faróis de neblina adaptados. 17

18 Carro com mini alto-falantes adaptados. 18
Pontifícia Universidade Católica do Paraná. Centro de Ciências Exatas e de Tecnologia - CCET. Engenharia da Computação 4º Período. Gira-Park.
 Pontifícia Universidade Católica do Paraná Centro de Ciências Exatas e de Tecnologia - CCET Engenharia da Computação 4º Período Gira-Park Curitiba 2011 Fabio Pinheiro de Souza Ivan Lucas Reis Silva Rodrigo
Pontifícia Universidade Católica do Paraná Centro de Ciências Exatas e de Tecnologia - CCET Engenharia da Computação 4º Período Gira-Park Curitiba 2011 Fabio Pinheiro de Souza Ivan Lucas Reis Silva Rodrigo
Pontifícia Universidade Católica do Paraná - PUCPR. Centro de Ciências Exatas e Tecnologia - CCET. Engenharia de Computação
 Pontifícia Universidade Católica do Paraná - PUCPR Centro de Ciências Exatas e Tecnologia - CCET Engenharia de Computação Jean Carlo Ferreira Tambosi Raul Silva Donato Victor Henrique Alves Ribeiro STARK
Pontifícia Universidade Católica do Paraná - PUCPR Centro de Ciências Exatas e Tecnologia - CCET Engenharia de Computação Jean Carlo Ferreira Tambosi Raul Silva Donato Victor Henrique Alves Ribeiro STARK
Introdução à Plataforma ARDUINO
 MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
Projeto Panzer. Fabio Henrique Mazarotto Margareth Suchÿ
 Projeto Panzer Fabio Henrique Mazarotto henrymazza@yahoo.com Margareth Suchÿ meg.suchy@onda.com.br Michael Henrique Siegwarth suporte_mw@hotmail.com Reginaldo Hosoume mitutoyonec@yahoo.com.br Rodrigo Dyck
Projeto Panzer Fabio Henrique Mazarotto henrymazza@yahoo.com Margareth Suchÿ meg.suchy@onda.com.br Michael Henrique Siegwarth suporte_mw@hotmail.com Reginaldo Hosoume mitutoyonec@yahoo.com.br Rodrigo Dyck
Everton Henrique Nogueira do Valle Vinicius Tom Vidal. Iron Man Helmet. Curitiba, 2013.
 Everton Henrique Nogueira do Valle Vinicius Tom Vidal Iron Man Helmet Curitiba, 2013. 1 Everton Henrique Nogueira do Valle Vinicius Tom Vidal Iron Man Helmet Projeto apresentado como requisito parcial
Everton Henrique Nogueira do Valle Vinicius Tom Vidal Iron Man Helmet Curitiba, 2013. 1 Everton Henrique Nogueira do Valle Vinicius Tom Vidal Iron Man Helmet Projeto apresentado como requisito parcial
Gráfico de Tartaruga
 1 de 9 10/7/2009 17:51 Gráfico de Tartaruga Alexandre Perin - ale_perin@yahoo.com.br Eduardo Grando - duhgrando@yahoo.com.br Luciano Motti - luciano_motti@yahoo.com.br Victor Villela Serta - victorserta@gmail.com
1 de 9 10/7/2009 17:51 Gráfico de Tartaruga Alexandre Perin - ale_perin@yahoo.com.br Eduardo Grando - duhgrando@yahoo.com.br Luciano Motti - luciano_motti@yahoo.com.br Victor Villela Serta - victorserta@gmail.com
PROJETO VIPER. 1. Abstract. 2. Resumo. 3. Objetivos.
 Page 1 of 8 Anderson Trindade Venturini Barbara Martinazzo - Bruno de Souza - Gustavo von Dentz - andersonventurini@terra.com.br rina_1220@yahoo.com.br sz.bruno@terra.com.br gustavo.dentz@globo.com 1.
Page 1 of 8 Anderson Trindade Venturini Barbara Martinazzo - Bruno de Souza - Gustavo von Dentz - andersonventurini@terra.com.br rina_1220@yahoo.com.br sz.bruno@terra.com.br gustavo.dentz@globo.com 1.
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação. Display POV
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação Display POV CURITIBA 2011 1 Fernando Brambilla de Mello Renan Passador da Silva Victor
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação Display POV CURITIBA 2011 1 Fernando Brambilla de Mello Renan Passador da Silva Victor
PROJETO MASEC Integrantes
 1 de 8 10/7/2009 16:09 PROJETO MASEC Integrantes Gabriel Wilhelm de Jesus Mahamoud Al Sayd Sergio Meyemberg Junior Professores Orientadores Prof. º Gil Marcos Jess - Física IV ( gltjessj@terra.com.br )
1 de 8 10/7/2009 16:09 PROJETO MASEC Integrantes Gabriel Wilhelm de Jesus Mahamoud Al Sayd Sergio Meyemberg Junior Professores Orientadores Prof. º Gil Marcos Jess - Física IV ( gltjessj@terra.com.br )
Pontifícia Universidade Católica do Paraná. Engenharia de Computação
 Pontifícia Universidade Católica do Paraná Engenharia de Computação TRAVA MASTER Projeto dos alunos Carla Carubelli e Felipe Arenhardt Tomaz. Curitiba Junho de 2011 1 RESUMO Este projeto tem como principal
Pontifícia Universidade Católica do Paraná Engenharia de Computação TRAVA MASTER Projeto dos alunos Carla Carubelli e Felipe Arenhardt Tomaz. Curitiba Junho de 2011 1 RESUMO Este projeto tem como principal
Rafael Girotto Narciso de Oliveira Wagner Caron Amoros
 Page of 2 Daniel Soifer Kriger dsk985@yahoo.com.br Rafael Girotto Narciso de Oliveira rafaelgirotto@uol.com.br Wagner Caron Amoros vutancla@yahoo.com.br Zoroastro Henrique de Santana Júnior stormyzj@yahoo.com.br
Page of 2 Daniel Soifer Kriger dsk985@yahoo.com.br Rafael Girotto Narciso de Oliveira rafaelgirotto@uol.com.br Wagner Caron Amoros vutancla@yahoo.com.br Zoroastro Henrique de Santana Júnior stormyzj@yahoo.com.br
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA ENGENHARIA DA COMPUTAÇÃO
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA ENGENHARIA DA COMPUTAÇÃO PROJETO TOMADA INTELIGENTE LUCAS MELLO NAMORATO LEONARDO BONFANTI CURITIBA 2013 2 TOMADA INTELIGENTE ENG. COMPUTAÇÃO
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA ENGENHARIA DA COMPUTAÇÃO PROJETO TOMADA INTELIGENTE LUCAS MELLO NAMORATO LEONARDO BONFANTI CURITIBA 2013 2 TOMADA INTELIGENTE ENG. COMPUTAÇÃO
Pequenos Projetos com Arduino
 Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Pequenos Projetos com Arduino Jener Toscano
Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Pequenos Projetos com Arduino Jener Toscano
Cortador de Grama
 1 de 9 10/7/2009 16:04 Cortador de Grama Charles Alessandro - charleshd@brturbo.com.br Edson Procopio - edson.procopio@pucpr.br Filipe Gaspar - spiderfga@yahoo.com.br Rafael Henrique - rafaelddd3@hotmail.com
1 de 9 10/7/2009 16:04 Cortador de Grama Charles Alessandro - charleshd@brturbo.com.br Edson Procopio - edson.procopio@pucpr.br Filipe Gaspar - spiderfga@yahoo.com.br Rafael Henrique - rafaelddd3@hotmail.com
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação. Control Arm (Pong)
") PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação Control Arm (Pong) CURITIBA 2010 Edson Luiz Sebold Martins Renan Passador da Silva Victor
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação Control Arm (Pong) CURITIBA 2010 Edson Luiz Sebold Martins Renan Passador da Silva Victor
PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO DA SILVEIRA
 PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO DA SILVEIRA PROJETO: Tanque de Gauss CURITIBA 2012 2 PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO
PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO DA SILVEIRA PROJETO: Tanque de Gauss CURITIBA 2012 2 PONTIFÍCIA UNIVERSIDADE CATÓLICA KRISTIANO SIMAS TRIDAPALLI LEONARDO ARAUJO
Projeto "Broquinho" Página Oficial - Projeto Broquinho
 Projeto "Broquinho" Página Oficial - Projeto Broquinho Bernardo Bonato Brandalize - bernardo_bb@bol.com.br José Henrique Machado de Almeida - payakan@pop.com.br Kimar Arakaki Neves - d0067765@rla14.pucpr.br
Projeto "Broquinho" Página Oficial - Projeto Broquinho Bernardo Bonato Brandalize - bernardo_bb@bol.com.br José Henrique Machado de Almeida - payakan@pop.com.br Kimar Arakaki Neves - d0067765@rla14.pucpr.br
ERIK LEÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS LEONARDO COSTA EX - LADDER
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO ERIK LEÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS LEONARDO COSTA EX - LADDER CURITIBA 2013 Resumo O projeto envolve
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO ERIK LEÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS LEONARDO COSTA EX - LADDER CURITIBA 2013 Resumo O projeto envolve
CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ANDRÉ CLAUDINO ALBO ALENCAR FISICA 3 ENGENHARIA DA COMPUTAÇÃO
 1 CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ANDRÉ CLAUDINO ALBO ALENCAR FISICA 3 ENGENHARIA DA COMPUTAÇÃO DOCUMENTAÇÃO DO PROJETO CANCELA EASY ACESS PROFESSOR: GIL MARCOS JESS
1 CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ANDRÉ CLAUDINO ALBO ALENCAR FISICA 3 ENGENHARIA DA COMPUTAÇÃO DOCUMENTAÇÃO DO PROJETO CANCELA EASY ACESS PROFESSOR: GIL MARCOS JESS
Roda Gigante. Professores Orientadores:
 1 de 5 10/7/2009 15:54 Roda Gigante Giovanni Alex Singer Guchtain Finzetto - barraca.de@gmail.com Kelly Trevisan Penno - lillypenno@gmail.com Rodrigo Costa Dutra - ruri_baka_omoikane@hotmail.com Professores
1 de 5 10/7/2009 15:54 Roda Gigante Giovanni Alex Singer Guchtain Finzetto - barraca.de@gmail.com Kelly Trevisan Penno - lillypenno@gmail.com Rodrigo Costa Dutra - ruri_baka_omoikane@hotmail.com Professores
Data Over Laser
 1 de 6 13/7/2009 15:13 Data Over Laser Gustavo Gomes gustavo.gomes@siemens.com Robson Pugsley rpugsley@gmail.com Professores Orientadores: Profº Gil Marcos Jess - Física - gltjessj@terra.com.br Profº Afonso
1 de 6 13/7/2009 15:13 Data Over Laser Gustavo Gomes gustavo.gomes@siemens.com Robson Pugsley rpugsley@gmail.com Professores Orientadores: Profº Gil Marcos Jess - Física - gltjessj@terra.com.br Profº Afonso
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DA COMPUTAÇÃO
 1 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DA COMPUTAÇÃO EAH (Electronic Air Hockey) CURITIBA 2012 2 ALISSON RAVAGLIO SANTOS KEVEN DIEGO FARIAS KOBERSTEIN KONRADO
1 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DA COMPUTAÇÃO EAH (Electronic Air Hockey) CURITIBA 2012 2 ALISSON RAVAGLIO SANTOS KEVEN DIEGO FARIAS KOBERSTEIN KONRADO
Pontifícia Universidade Católica do Paraná PUCPR Centro de Ciências Exatas e Tecnologia - CCET. Body Energy. Curitiba Novembro/2009
 1 Pontifícia Universidade Católica do Paraná PUCPR Centro de Ciências Exatas e Tecnologia - CCET Body Energy Curitiba Novembro/2009 2 Eduardo Sachwek Fontanetti Leandro Claudino Roan Saturnino Marques
1 Pontifícia Universidade Católica do Paraná PUCPR Centro de Ciências Exatas e Tecnologia - CCET Body Energy Curitiba Novembro/2009 2 Eduardo Sachwek Fontanetti Leandro Claudino Roan Saturnino Marques
Arduino Lab 09 Leitura de
 Arduino Lab 09 Leitura de um encoder industrial Heidenhain com o Arduino Neste Lab explicaremos o funcionamento e teste de um encoder industrial de quadratura, muito utilizado na indústria como sistema
Arduino Lab 09 Leitura de um encoder industrial Heidenhain com o Arduino Neste Lab explicaremos o funcionamento e teste de um encoder industrial de quadratura, muito utilizado na indústria como sistema
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATS E TECNOLÓGICAS ENGENHARIA DE COMPUTAÇÃO INFO - PARKING
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATS E TECNOLÓGICAS ENGENHARIA DE COMPUTAÇÃO INFO - PARKING CURITIBA 2010 LEONARDO ALVES FERREIRA MARCELO JÚNIOR COSSETIN INFO - PARKING Documentação
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATS E TECNOLÓGICAS ENGENHARIA DE COMPUTAÇÃO INFO - PARKING CURITIBA 2010 LEONARDO ALVES FERREIRA MARCELO JÚNIOR COSSETIN INFO - PARKING Documentação
MINICURSO - PLATAFORMA ARDUINO Eixo de Informação e Comunicação Gil Eduardo de Andrade
 Introdução MINICURSO - PLATAFORMA ARDUINO Eixo de Informação e Comunicação Gil Eduardo de Andrade A oficina proposta neste documento apresenta conceitos iniciais e intermediários sobre o funcionamento
Introdução MINICURSO - PLATAFORMA ARDUINO Eixo de Informação e Comunicação Gil Eduardo de Andrade A oficina proposta neste documento apresenta conceitos iniciais e intermediários sobre o funcionamento
PROJETO PÊNDULO. Integrantes:
 1 de 17 10/7/2009 16:16 PROJETO PÊNDULO Integrantes: Fabricio Righetto Leite - karpabr@gmail.com Felippe Soares Guimarães felippe.guima@gmail.com Victor Lappas Gimenez - old.sorcerer@gmail.com Professores
1 de 17 10/7/2009 16:16 PROJETO PÊNDULO Integrantes: Fabricio Righetto Leite - karpabr@gmail.com Felippe Soares Guimarães felippe.guima@gmail.com Victor Lappas Gimenez - old.sorcerer@gmail.com Professores
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO CHRISTIAN ARROSI CHRISTIAN KITZMANN GOMES COILGUN
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO CHRISTIAN ARROSI CHRISTIAN KITZMANN GOMES COILGUN CURITIBA 2012 CHRISTIAN ARROSI CHRISTIAN KITZMANN GOMES
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO CHRISTIAN ARROSI CHRISTIAN KITZMANN GOMES COILGUN CURITIBA 2012 CHRISTIAN ARROSI CHRISTIAN KITZMANN GOMES
Gira-Sol. Professores Orientadores
 Page 1 of 10 Gira-Sol Alexandre Trentini Nunes da Silveira ( alexandre_tns@hotmail.com ) Filipe Alexandre Nasato ( filipe@cpu.eng.br ) Gustavo Cheminn Madruga ( gcmadruga@netpar.com.br ) João Victor Gonçalves
Page 1 of 10 Gira-Sol Alexandre Trentini Nunes da Silveira ( alexandre_tns@hotmail.com ) Filipe Alexandre Nasato ( filipe@cpu.eng.br ) Gustavo Cheminn Madruga ( gcmadruga@netpar.com.br ) João Victor Gonçalves
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Interfaces de E/S
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Interfaces de E/S Heitor Medeiros Florencio Interfaces de Entrada e Saída Interfaces de E/S A seção
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Interfaces de E/S Heitor Medeiros Florencio Interfaces de Entrada e Saída Interfaces de E/S A seção
1 RESUMO. Palavras-chave: Controle, encoders, motor CC. 2 INTRODUÇÃO
 1 RESUMO Na sociedade moderna se tornou cada vez mais presente e necessário meios de controlar dispositivos levando em consideração precisões maiores e perdas menores. Em diversos cenários o controle de
1 RESUMO Na sociedade moderna se tornou cada vez mais presente e necessário meios de controlar dispositivos levando em consideração precisões maiores e perdas menores. Em diversos cenários o controle de
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO SCATMAN S DIMMER
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO SCATMAN S DIMMER CURITIBA 2010 GILBERTO YOSHIAKI YAMANOUCHI RAFAEL HENRIQUE AZANHA
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO SCATMAN S DIMMER CURITIBA 2010 GILBERTO YOSHIAKI YAMANOUCHI RAFAEL HENRIQUE AZANHA
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA DE CIÊNCIAS EXATAS E DE TECNOLOGIA CURSO DE ENGENHARIA DA COMPUTAÇÃO CAIQUE SIQUEIRA PEDRO RAFAEL
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA DE CIÊNCIAS EXATAS E DE TECNOLOGIA CURSO DE ENGENHARIA DA COMPUTAÇÃO CAIQUE SIQUEIRA PEDRO RAFAEL TRANCA AUTOMATIZADA CURITIBA CAIQUE SIQUEIRA PEDRO RAFAEL
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA DE CIÊNCIAS EXATAS E DE TECNOLOGIA CURSO DE ENGENHARIA DA COMPUTAÇÃO CAIQUE SIQUEIRA PEDRO RAFAEL TRANCA AUTOMATIZADA CURITIBA CAIQUE SIQUEIRA PEDRO RAFAEL
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ENGENHARIA DE COMPUTAÇÃO
 iii PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ENGENHARIA DE COMPUTAÇÃO Mario César Calegari Filho Mauricio Souza Campanha de Freitas Rodrigo Yoshida Takeda Rodrigo Look de Almeida Torres Projeto apresentado
iii PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ENGENHARIA DE COMPUTAÇÃO Mario César Calegari Filho Mauricio Souza Campanha de Freitas Rodrigo Yoshida Takeda Rodrigo Look de Almeida Torres Projeto apresentado
Submarino. Projeto DaVinci
 Submarino Projeto DaVinci Alexandre Maeoka - a_maeoka@brturbo.com Anthuan Baraquetti - anthuan@netpar.com.br Daiane de Fátima Massaki - daianemassaki@bol.com.br Henrique Galperin - hgalperin@pop.com.br
Submarino Projeto DaVinci Alexandre Maeoka - a_maeoka@brturbo.com Anthuan Baraquetti - anthuan@netpar.com.br Daiane de Fátima Massaki - daianemassaki@bol.com.br Henrique Galperin - hgalperin@pop.com.br
Kit didático para controle de velocidade e posição de um motor de corrente contínua
 https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
Pontifícia Universidade Católica do Paraná ESCOLA POLITECNICA. Engenharia da Computação 5º Período
 Pontifícia Universidade Católica do Paraná ESCOLA POLITECNICA Engenharia da Computação 5º Período ACQUASCAN CURITIBA 2012 1 FABIO PINHEIRO DE SOUZA IVAN LUCAS REIS SILVA RODRIGO MONMA LUCAS ACQUASCAN Projeto
Pontifícia Universidade Católica do Paraná ESCOLA POLITECNICA Engenharia da Computação 5º Período ACQUASCAN CURITIBA 2012 1 FABIO PINHEIRO DE SOUZA IVAN LUCAS REIS SILVA RODRIGO MONMA LUCAS ACQUASCAN Projeto
ü Na década de 1920 os dispositivos mecânicos foram substituídos pelos relés; ü O uso da lógica de relés dificultava modificações do processo;
 O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
PROJETO MAGLEVE PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIENCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO CURITIBA,
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIENCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO MAGLEVE CURITIBA, 2009 1 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIENCIAS
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIENCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO MAGLEVE CURITIBA, 2009 1 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIENCIAS
ASPECTOS TEÓRICOS DOS EXPERIMENTOS
 ASPECTOS TEÓRICOS DOS EXPERIMENTOS OBJETIVO Compreender a Lei de Ohms Compreender funcionamento dos atuadores e sensores Compreender o circuito que utiliza o arduíno. Compreender o código FAZER O LED INTERNO
ASPECTOS TEÓRICOS DOS EXPERIMENTOS OBJETIVO Compreender a Lei de Ohms Compreender funcionamento dos atuadores e sensores Compreender o circuito que utiliza o arduíno. Compreender o código FAZER O LED INTERNO
Microcontroladores e Robótica
 Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLOGICAS ENGENHARIA DE COMPUTAÇÃO MAYKON LUAN DIAS BARBOSA
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLOGICAS ENGENHARIA DE COMPUTAÇÃO MAYKON LUAN DIAS BARBOSA SILVIO DA COSTA REIS DETECTIVE CAR CURITIBA 2010 MAYKON LUAN DIAS BARBOSA
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLOGICAS ENGENHARIA DE COMPUTAÇÃO MAYKON LUAN DIAS BARBOSA SILVIO DA COSTA REIS DETECTIVE CAR CURITIBA 2010 MAYKON LUAN DIAS BARBOSA
CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ANDRÉ CLAUDINO GABRIEL HENRIQUE GAVA ALBO ALENCAR
 CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ANDRÉ CLAUDINO GABRIEL HENRIQUE GAVA ALBO ALENCAR MICROPROCESSADORES I ENGENHARIA DA COMPUTAÇÃO PROJETO KWISTER-PRO PROFESSOR: AFONSO
CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ANDRÉ CLAUDINO GABRIEL HENRIQUE GAVA ALBO ALENCAR MICROPROCESSADORES I ENGENHARIA DA COMPUTAÇÃO PROJETO KWISTER-PRO PROFESSOR: AFONSO
CARRINHO UTILIZANDO L293D E MOTORES CC
 7 CARRINHO CARRINHO UTILIZANDO L293D E MOTORES CC Nesse projeto, aprenderemos a dar comandos básicos a um par de motores de corrente contínua (CC) utilizando uma ponte H dupla, no caso o L293D, com o Arduino.
7 CARRINHO CARRINHO UTILIZANDO L293D E MOTORES CC Nesse projeto, aprenderemos a dar comandos básicos a um par de motores de corrente contínua (CC) utilizando uma ponte H dupla, no caso o L293D, com o Arduino.
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS ENGENHARIA DE COMPUTAÇÃO
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS ENGENHARIA DE COMPUTAÇÃO VENDING MACHINE CURITIBA 2010 ALEX LAM FELIPE GUSTAVO BEHNE GUSTAVO MURILO SCHMITT MASSANEIRO
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS ENGENHARIA DE COMPUTAÇÃO VENDING MACHINE CURITIBA 2010 ALEX LAM FELIPE GUSTAVO BEHNE GUSTAVO MURILO SCHMITT MASSANEIRO
Controle de Tensão de Mini Aerogerador e Interface com Plataformas Computacionais Utilizando Arduíno
 Controle de Tensão de Mini Aerogerador e Interface com Plataformas Computacionais Utilizando Arduíno Code: 19.025 F. O. Matos, J. N. Jesus, M. L. Andrade, T. O. Nascimento e G. N. A. Maranhão Universidade
Controle de Tensão de Mini Aerogerador e Interface com Plataformas Computacionais Utilizando Arduíno Code: 19.025 F. O. Matos, J. N. Jesus, M. L. Andrade, T. O. Nascimento e G. N. A. Maranhão Universidade
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CHECKERS CURITIBA
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CHECKERS CURITIBA 2012 LUIZ AUGUSTO DE PAULA CHECKERS Projeto apresentado à disciplina de Resolução de Problemas em Engenharia II do Curso de Engenharia de Computação
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CHECKERS CURITIBA 2012 LUIZ AUGUSTO DE PAULA CHECKERS Projeto apresentado à disciplina de Resolução de Problemas em Engenharia II do Curso de Engenharia de Computação
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CCET CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO MICROPROCESSADORES I
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CCET CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO MICROPROCESSADORES I PROJETO VIDRO ELÉTRICO Luiz Renato Hey Schmidt Rafael da Silva
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CCET CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO MICROPROCESSADORES I PROJETO VIDRO ELÉTRICO Luiz Renato Hey Schmidt Rafael da Silva
REGULADOR COMPACTO PARA TURBINAS HIDRÁULICAS VOITH HYDRO
 GGH / 05 17 a 22 de Outubro de 1999 Foz do Iguaçu Paraná - Brasil GRUPO I GRUPO DE ESTUDO DE GERAÇÃO HIDRÁULICA (GGH) REGULADOR COMPACTO PARA TURBINAS HIDRÁULICAS José Cláudio Mazzoleni* Jorge Izukawa
GGH / 05 17 a 22 de Outubro de 1999 Foz do Iguaçu Paraná - Brasil GRUPO I GRUPO DE ESTUDO DE GERAÇÃO HIDRÁULICA (GGH) REGULADOR COMPACTO PARA TURBINAS HIDRÁULICAS José Cláudio Mazzoleni* Jorge Izukawa
Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW
 Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW "Este artigo tem como proposta apresentar uma plataforma para monitoramento
Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW "Este artigo tem como proposta apresentar uma plataforma para monitoramento
Engenharia - Ciclo Básico. Orientações
 UNIP Universidade Paulista Engenharia - Ciclo Básico Orientações Atividades Práticas Supervisionadas 2º e 3º semestres. 2019 I OBJETIVO Projetar e construir um protótipo de um carro movido a energia elétrica
UNIP Universidade Paulista Engenharia - Ciclo Básico Orientações Atividades Práticas Supervisionadas 2º e 3º semestres. 2019 I OBJETIVO Projetar e construir um protótipo de um carro movido a energia elétrica
Pontifícia Universidade Católica Do Paraná Engenharia De Computação. Projeto Alimentator
 Pontifícia Universidade Católica Do Paraná Engenharia De Computação Projeto Alimentator Curitiba 2011 Alex Willian Lam Arlei José Turatti Maurício Souza C. de Freitas Projeto Alimentator Este projeto será
Pontifícia Universidade Católica Do Paraná Engenharia De Computação Projeto Alimentator Curitiba 2011 Alex Willian Lam Arlei José Turatti Maurício Souza C. de Freitas Projeto Alimentator Este projeto será
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Comandos Elétricos
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Comandos Elétricos Heitor Medeiros Florencio Comandos Elétricos na Automação Industrial Conhecimentos de
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Comandos Elétricos Heitor Medeiros Florencio Comandos Elétricos na Automação Industrial Conhecimentos de
Bluetooth. Professores Orientadores:
 Page 1 of 7 Bluetooth Breno Cerci - brecerci@hotmail.com Diogo Harger - diogo@ngw.com.br Gustavo Bohn - gustavo@bohn.com.br Gustavo Driessen - gustavo@ngw.com.br Luiz Rocha - luizrochaa@gmail.com Marcos
Page 1 of 7 Bluetooth Breno Cerci - brecerci@hotmail.com Diogo Harger - diogo@ngw.com.br Gustavo Bohn - gustavo@bohn.com.br Gustavo Driessen - gustavo@ngw.com.br Luiz Rocha - luizrochaa@gmail.com Marcos
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes
 Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
1. RESUMO 2. INTRODUÇÃO
 1. RESUMO O oxímetro de pulso é um aparelho capaz de medir a oxigenação do sangue e a frequência cardíaca, utilizado em aplicações médicas. Este trabalho tem como fundamento estudar o funcionamento de
1. RESUMO O oxímetro de pulso é um aparelho capaz de medir a oxigenação do sangue e a frequência cardíaca, utilizado em aplicações médicas. Este trabalho tem como fundamento estudar o funcionamento de
Controle de Ventilador de Fonte de PC em Malha Aberta
 Universidade Tecnológica Federal do Paraná Campus Curitiba Departamento Acadêmico de Eletrônica Tecnologia em Mecatrônica Industrial Sistemas Microprocessados Controle de Ventilador de Fonte de PC em Malha
Universidade Tecnológica Federal do Paraná Campus Curitiba Departamento Acadêmico de Eletrônica Tecnologia em Mecatrônica Industrial Sistemas Microprocessados Controle de Ventilador de Fonte de PC em Malha
Atuadores em Robótica
 Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
Atuadores em Robótica Profa. Michelle Mendes Santos michelle@cpdee.ufmg.br Atuadores Indicadores Em robótica muitas vezes é necessário sinalizar um acontecimento ou situação importante. Essa sinalização
Sistemas de Controle 1
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap2 - Modelagem no Domínio de Frequência Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 1 Cap2 - Modelagem no Domínio de Frequência Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 1 Prof. Dr. Marcos
2 DESENVOLVIMENTO FUNCIONAL DO ACIONAMENTO
 2 DESENVOLVIMENTO FUNCIONAL DO ACIONAMENTO 2.1 Acionamento em Meio-passo No presente trabalho, o funcionamento do motor em meio-passo será implementado energizando as fases segundo o diagrama mostrado
2 DESENVOLVIMENTO FUNCIONAL DO ACIONAMENTO 2.1 Acionamento em Meio-passo No presente trabalho, o funcionamento do motor em meio-passo será implementado energizando as fases segundo o diagrama mostrado
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL
 DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLOGICAS ENGENHARIA DE COMPUTAÇÃO
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLOGICAS ENGENHARIA DE COMPUTAÇÃO BRUNO BAPTISTA BUCKERIDGE HENRIQUE DUARTE LIMA JONATHAN CARVALHO DINIZ RENAN MORIS FERREIRA
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E TECNOLOGICAS ENGENHARIA DE COMPUTAÇÃO BRUNO BAPTISTA BUCKERIDGE HENRIQUE DUARTE LIMA JONATHAN CARVALHO DINIZ RENAN MORIS FERREIRA
ROBÔ PARA INSPEÇÃO DE ÁREAS CLASSIFICADAS E DE DIFÍCIL ACESSO COM TRANSMISSÃO DE IMAGENS SEM FIO
 ROBÔ PARA INSPEÇÃO DE ÁREAS CLASSIFICADAS E DE DIFÍCIL ACESSO COM TRANSMISSÃO DE IMAGENS SEM FIO Jonathan Pereira IFRN Campus Mossoró. E-mail: jonathan@cefetrn.br Alexsandro Galdino IFRN Campus Mossoró.
ROBÔ PARA INSPEÇÃO DE ÁREAS CLASSIFICADAS E DE DIFÍCIL ACESSO COM TRANSMISSÃO DE IMAGENS SEM FIO Jonathan Pereira IFRN Campus Mossoró. E-mail: jonathan@cefetrn.br Alexsandro Galdino IFRN Campus Mossoró.
AUTO DAMAS. Fabiano Elias Marcus Petri
 Fabiano Elias Marcus Petri AUTO DAMAS Projeto apresentado como requisito Parcial para avaliação do Programa de Aprendizagem em Física IV e requisito para o programa de Aprendizagem em RPE, do Curso de
Fabiano Elias Marcus Petri AUTO DAMAS Projeto apresentado como requisito Parcial para avaliação do Programa de Aprendizagem em Física IV e requisito para o programa de Aprendizagem em RPE, do Curso de
PIBIC/PIBITI/IC Jr Relatório das Atividades de Pesquisa 23ª SEMIC
 ATIVIDADES EXECUTADAS PELO BOLSISTA / VOLUNTÁRIO DADOS DE IDENTIFICAÇÃO: Do bolsista: Nome: Carlos Vinícius Machado Caldeira Curso: Engenharia Elétrica com ênfase em Sistemas Eletrônicos Período de vigência
ATIVIDADES EXECUTADAS PELO BOLSISTA / VOLUNTÁRIO DADOS DE IDENTIFICAÇÃO: Do bolsista: Nome: Carlos Vinícius Machado Caldeira Curso: Engenharia Elétrica com ênfase em Sistemas Eletrônicos Período de vigência
Elevador eletro magnético Projeto Integrado
 1 de 8 13/7/2009 16:00 Elevador eletro magnético Projeto Integrado Equipe: Gustavo H. D. Oliveira,4 Período, Engenharia de Computaçãogustavo_oliveira55@hotmail.com Thiago Fernando de Azevedo, 4 Período,
1 de 8 13/7/2009 16:00 Elevador eletro magnético Projeto Integrado Equipe: Gustavo H. D. Oliveira,4 Período, Engenharia de Computaçãogustavo_oliveira55@hotmail.com Thiago Fernando de Azevedo, 4 Período,
Carla Koike Depto. Ciências da Computação UnB
 Robótica Modular Reconfigurável Carla Koike Depto. Ciências da Computação UnB Definição Robôs compostos de um grande número de módulos repetidos que podem organizar suas conexões e formar uma grande variedade
Robótica Modular Reconfigurável Carla Koike Depto. Ciências da Computação UnB Definição Robôs compostos de um grande número de módulos repetidos que podem organizar suas conexões e formar uma grande variedade
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Projeto de sistema de controle digital PID com Arduino Prof. Dr. Marcos Lajovic Carneiro Referência: Ivan Seidel https://www.youtube.com/watch?v=txftr4tqkya
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Projeto de sistema de controle digital PID com Arduino Prof. Dr. Marcos Lajovic Carneiro Referência: Ivan Seidel https://www.youtube.com/watch?v=txftr4tqkya
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL
 DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ MAGLOCKER
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ MAGLOCKER CURITIBA 2012 RODRIGO BUSATO MAGLOKER Projeto apresentado a disciplina de Resolução de Problemas em Engenharia II do Curso de Engenharia de Computação
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ MAGLOCKER CURITIBA 2012 RODRIGO BUSATO MAGLOKER Projeto apresentado a disciplina de Resolução de Problemas em Engenharia II do Curso de Engenharia de Computação
Eletronic Monkey. Professores Orientadores:
 Page 1 of 8 Eletronic Monkey Ana Carla Ferreira de Oliveira - nakalaferoli@gmail.com Keiti Takeuti dos Santos - keiti@celepar.pr.gov.br Natalia Loyola Grenier - sereia361@gmail.com Paulo Ricardo Lopes
Page 1 of 8 Eletronic Monkey Ana Carla Ferreira de Oliveira - nakalaferoli@gmail.com Keiti Takeuti dos Santos - keiti@celepar.pr.gov.br Natalia Loyola Grenier - sereia361@gmail.com Paulo Ricardo Lopes
SUPERVISÃO DE VAZÃO E NÍVEL UTILIZANDO PLATAFORMA ARDUINO
 SUPERVISÃO DE VAZÃO E NÍVEL UTILIZANDO PLATAFORMA ARDUINO 1. INTRODUÇÃO Projetado com um micro controlador Atmel AVR de placa única, o Arduino é uma plataforma de prototipagem eletrônica de hardware livre
SUPERVISÃO DE VAZÃO E NÍVEL UTILIZANDO PLATAFORMA ARDUINO 1. INTRODUÇÃO Projetado com um micro controlador Atmel AVR de placa única, o Arduino é uma plataforma de prototipagem eletrônica de hardware livre
8º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA Cusco, 23 a 25 de Outubro de 2007
 8º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA Cusco, 23 a 25 de Outubro de 2007 SISTEMA DIGITAL DE CONTROLE DE UMA MESA DE POSICIONAMENTO D.I. Lasmar*, G.A. Rossi*, A.A.T. Maia*, J.M. Galvez* *Universidade
8º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA Cusco, 23 a 25 de Outubro de 2007 SISTEMA DIGITAL DE CONTROLE DE UMA MESA DE POSICIONAMENTO D.I. Lasmar*, G.A. Rossi*, A.A.T. Maia*, J.M. Galvez* *Universidade
2017 VOL. 6 N 2 - ISSN
 Revista Diálogos Interdisciplinares 2017 VOL. 6 N 2 - ISSN 2317-3793 Análise de Segurança de Dados no Sistema de Controle e Automação de Plataformas Elevatórias Via Wireless Ailton Rocha de Souza 1 ; Diego
Revista Diálogos Interdisciplinares 2017 VOL. 6 N 2 - ISSN 2317-3793 Análise de Segurança de Dados no Sistema de Controle e Automação de Plataformas Elevatórias Via Wireless Ailton Rocha de Souza 1 ; Diego
Capítulo 8. Técnicas do Lugar das Raízes
 Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
Capítulo 8 Técnicas do Lugar das Raízes Fig. 8.1 a. Sistema a malha fechada; b. função de transferência equivalente Entrada Sinal atuante Função de Transferência do canal direto Função de Transferência
PARTE I - IDENTIFICAÇÃO
 Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Curso de Graduação em Engenharia Elétrica
 Curso de Graduação em Engenharia Elétrica ACE - Acionamentos Elétricos 218-1 Instrutor - Prof. Ademir Nied Projeto 2 Data Limite para Entrega: 27/6/218 Observações: Consulta livre e um relatório por grupo.
Curso de Graduação em Engenharia Elétrica ACE - Acionamentos Elétricos 218-1 Instrutor - Prof. Ademir Nied Projeto 2 Data Limite para Entrega: 27/6/218 Observações: Consulta livre e um relatório por grupo.
Manual do Receptor Infravermelho Studuino
 Manual do Receptor Infravermelho Studuino Este manual explica o ambiente de programação Studuino e como utiliza-lo. À medida em que o Ambiente de Programação Studuino é desenvolvido, este manual pode ser
Manual do Receptor Infravermelho Studuino Este manual explica o ambiente de programação Studuino e como utiliza-lo. À medida em que o Ambiente de Programação Studuino é desenvolvido, este manual pode ser
Pontifícia Universidade Católica do Paraná PUCPR Curso Engenharia de Computação. Fabio Eduardo Pereira José Roberto Wotecoski Pedro José F.
 Pontifícia Universidade Católica do Paraná PUCPR Curso Engenharia de Computação Fabio Eduardo Pereira José Roberto Wotecoski Pedro José F. Gonçalves Pic Pong Curitiba 2009-11-30 Fabio Eduardo Pereira José
Pontifícia Universidade Católica do Paraná PUCPR Curso Engenharia de Computação Fabio Eduardo Pereira José Roberto Wotecoski Pedro José F. Gonçalves Pic Pong Curitiba 2009-11-30 Fabio Eduardo Pereira José
POR TERRA, ÁGUA E AR:
 ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO A EDUCAÇÃO PROFISSIONALIZANTE TÉCNICO EM INFORMÁTICA ELISÂNGELA MAZEI DA SILVA LUCAS LOURENÇO
ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO A EDUCAÇÃO PROFISSIONALIZANTE TÉCNICO EM INFORMÁTICA ELISÂNGELA MAZEI DA SILVA LUCAS LOURENÇO
PONTIFÍCIA UNIVERSIDADE CATÓLICA
 PONTIFÍCIA UNIVERSIDADE CATÓLICA ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO EDUARDO MENDES DE LIMA SINALEIRO INTELIGENTE CURITIBA 2013 1 EDUARDO MENDES DE LIMA SINALEIRO INTELIGENTE Trabalho
PONTIFÍCIA UNIVERSIDADE CATÓLICA ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO EDUARDO MENDES DE LIMA SINALEIRO INTELIGENTE CURITIBA 2013 1 EDUARDO MENDES DE LIMA SINALEIRO INTELIGENTE Trabalho
CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ROBSON ALMEIDA ENGENHARIA DA COMPUTAÇÃO DOCUMENTAÇÃO DO PROJETO CAIXA FORTE
 1 CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ROBSON ALMEIDA ENGENHARIA DA COMPUTAÇÃO DOCUMENTAÇÃO DO PROJETO CAIXA FORTE PROFESSOR: AFONSO MIGUEL CURITIBA 2011 2 CENTRO DE CIÊNCIAS
1 CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DA COMPUTAÇÃO ROBSON ALMEIDA ENGENHARIA DA COMPUTAÇÃO DOCUMENTAÇÃO DO PROJETO CAIXA FORTE PROFESSOR: AFONSO MIGUEL CURITIBA 2011 2 CENTRO DE CIÊNCIAS
Arduino. Aula 3 motores
 Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
Autor: Diego Gouvêa Macharete Trally
 Autor: Diego Gouvêa Macharete Trally Orientador: José Gabriel R. C. Gomes 1 Introdução Motivação O Processo de Ajuste A Eletrônica do Projeto Processamento de Imagem Controle Resultados d Obtidos Conclusões
Autor: Diego Gouvêa Macharete Trally Orientador: José Gabriel R. C. Gomes 1 Introdução Motivação O Processo de Ajuste A Eletrônica do Projeto Processamento de Imagem Controle Resultados d Obtidos Conclusões
CONTROLE DE UM PROTÓTIPO EDUCATIVO DE UMA ESTEIRA INDUSTRIAL
 CONTROLE DE UM PROTÓTIPO EDUCATIVO DE UMA ESTEIRA INDUSTRIAL Márcia Roseli Ribeiro Barbosar marcia_roseli@yahoo.com.br Universidade Federal do Pará, Departamento de Engenharia Elétrica Campus Universitário
CONTROLE DE UM PROTÓTIPO EDUCATIVO DE UMA ESTEIRA INDUSTRIAL Márcia Roseli Ribeiro Barbosar marcia_roseli@yahoo.com.br Universidade Federal do Pará, Departamento de Engenharia Elétrica Campus Universitário
CLP ESTRUTURA E FUNCIONAMENTO ROGER NABEYAMA MICHELS
 CLP ESTRUTURA E FUNCIONAMENTO ROGER NABEYAMA MICHELS DISPOSITIVO CAPAZ DE Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou reparos em falhas que venham a ocorrer durante
CLP ESTRUTURA E FUNCIONAMENTO ROGER NABEYAMA MICHELS DISPOSITIVO CAPAZ DE Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou reparos em falhas que venham a ocorrer durante
Introdução. Objectivos
 ROCK IN RIO ESCOLA SOLAR Criatividade e Desenvolvimento Sustentável Introdução Sem a participação activa e concreta das empresas e mesmo de algumas autarquias, somos reféns de uma grande inércia e de falta
ROCK IN RIO ESCOLA SOLAR Criatividade e Desenvolvimento Sustentável Introdução Sem a participação activa e concreta das empresas e mesmo de algumas autarquias, somos reféns de uma grande inércia e de falta
CAMINHÃO MINIATURA RADIOCONTROLADO: PROJETO DE MELHORIAS E MODERNIZAÇÃO.
 Wellington Almeida CAMINHÃO MINIATURA RADIOCONTROLADO: PROJETO DE MELHORIAS E MODERNIZAÇÃO. Relatório PIBITI. Orientador: Prof. Me. Eng. Régis Pasini SANTO ANDRÉ 2012 2 RESUMO O presente projeto de iniciação
Wellington Almeida CAMINHÃO MINIATURA RADIOCONTROLADO: PROJETO DE MELHORIAS E MODERNIZAÇÃO. Relatório PIBITI. Orientador: Prof. Me. Eng. Régis Pasini SANTO ANDRÉ 2012 2 RESUMO O presente projeto de iniciação
Introdução O MEC1000
 Introdução Esse documento tem como objetivo guiar o usuário durante a montagem e o uso do MEC1000. Os detalhes que compõem o equipamento são descritos de forma objetiva, de modo a facilitar a compreensão
Introdução Esse documento tem como objetivo guiar o usuário durante a montagem e o uso do MEC1000. Os detalhes que compõem o equipamento são descritos de forma objetiva, de modo a facilitar a compreensão
UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA DISCIPLINA DE CIRCUITOS ELETRÔNICOS Prof. Carlos Pimentel de Sousa
 UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA DISCIPLINA DE CIRCUITOS ELETRÔNICOS Prof. Carlos Pimentel de Sousa SENSOR APLICADO À CATRACA ÓPTICA ENGENHEIRANDOS: JOAQUIM BEZERRA FRANÇA FILHO - 9921290
UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE TECNOLOGIA DISCIPLINA DE CIRCUITOS ELETRÔNICOS Prof. Carlos Pimentel de Sousa SENSOR APLICADO À CATRACA ÓPTICA ENGENHEIRANDOS: JOAQUIM BEZERRA FRANÇA FILHO - 9921290
Sistema Experimental. Figura 40: Robô original de onde foram aproveitadas a base da estrutura de alumínio, motores, rodas e eletrônica de potência.
 73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA Projeto Automação Esteira Seletora Bruno Henrique Viecelli Felipe Cardoso Paulo Einstein Melges Arnaut Curitiba
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ PUC-PR CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA Projeto Automação Esteira Seletora Bruno Henrique Viecelli Felipe Cardoso Paulo Einstein Melges Arnaut Curitiba
Projeto gerador eólico
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE CURSO SUPERIOR DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL Projeto gerador eólico JOINVILLE, dezembro de 2014. 2 Altair
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA CAMPUS JOINVILLE CURSO SUPERIOR DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL Projeto gerador eólico JOINVILLE, dezembro de 2014. 2 Altair
SCREAMER. Ricardo Geraldes David João Lucas Pinheiro Berto
 Ricardo Geraldes David João Lucas Pinheiro Berto SCREAMER Projeto apresentado como requisito Parcial para avaliação do Programa de Aprendizagem em Microprocessadores I, do Curso de Engenharia de Computação
Ricardo Geraldes David João Lucas Pinheiro Berto SCREAMER Projeto apresentado como requisito Parcial para avaliação do Programa de Aprendizagem em Microprocessadores I, do Curso de Engenharia de Computação
INSTRUMENTAÇÃO MECATRÔNICA
 CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos
CONCEITOS DE INSTRUMENTAÇÃO Instrumentação é a ciência que aplica e desenvolve técnicas para adequação de instrumentos de medição, transmissão, indicação, registro e controle de variáveis físicas em equipamentos