CONTROLE POR VOZ UTILIZANDO A ENGINE JULIUS COM FALA CONTÍNUA
|
|
|
- Mauro Carneiro Canto
- 5 Há anos
- Visualizações:
Transcrição
1 CONTROLE POR VOZ UTILIZANDO A ENGINE JULIUS COM FALA CONTÍNUA Aluno: DEIVID GEOVANI SANT ANA Orientadora: JOYCE MARTINS
2 Roteiro Introdução Objetivos Fundamentação Teórica Reconhecimento de voz Engine Julius LapsAPI Lego NXT LeJOS Trabalhos Correlatos
3 Desenvolvimento Roteiro Requisitos Casos de Uso Robô Linguagem Reconhecimento de voz Resultado e discussões Conclusão Sugestões
4 Introdução Reconhecimento automático de voz Fala isolada Fala contínua Ditado contínuo Engine Julius

5 Objetivos Controle de voz por fala contínua Controlar um robô por voz Elaborar um vocabulário Enviar para o robô os comandos
6 Fundamentação Teórica Reconhecimento de voz (problemáticas) Sotaque do locutor Palavras com mesma pronúncia e significados diferentes Variação de pronúncia Relação sinal-ruído
7 Fundamentação Teórica Engine Julius (visão geral) Em desenvolvimento desde de 1998 Universidade de Kyoto Multi-plataforma Desenvolvimento de pesquisas, comercial e industrial
8 Fundamentação Teórica Fonte: Lee e Kawahara (2009, p. 131).
9 Fundamentação Teórica LaspAPI (visão geral) Encapsula a engine Julius Abstração no acesso à engine
10 Fundamentação Teórica Fonte: Klautau et al. (2012).

11 Fundamentação Teórica Lego NXT Kit básico de desenvolvimento Unidade central de processamento Sensores Servo-motor LeJOS Firmware e API Facilidade de implementação

12 Fundamentação Teórica Fonte: Lego Group (2013).
13 Trabalhos Correlatos Reconhecimento automático de fala por computador (LOUZADA, 2010) Utiliza a engine Julius Reconhecimento de palavra isolada Utiliza XML para modelo de linguagem Vocabulário restrito (5 comandos) Locomoção de objeto gráfico

14 Trabalhos Correlatos Fonte: Louzada (2010, p. 32).
15 Trabalhos Correlatos Reconhecimento de voz para aplicação em cadeira de rodas (BARCELOS et al., 2008) Utiliza ViaVoice Vocabulário restrito(5 comandos) Locomoção de uma cadeira de rodas

16 Trabalhos Correlatos Fonte: Barcelos et al. (2008).
17 Trabalhos Correlatos Reconhecimento de voz através de reconhecimento de padrões (OLIVEIRA, 2002) Utiliza reconhecimento de padrões Utiliza fase de treinamento Vocabulário restrito(7 comandos) Abertura de programas específicos
18 Desenvolvimento: requisitos Requisitos funcionais Captar a voz Possuir gramática de comandos Gerar comando de controle para robô
19 Desenvolvimento: requisitos Requisitos não funcionais Utilizar engine Julius encapsulada na LapsAPI Usar robô Lego Transmitir comandos por bluetooth Implementar a inteligência do robô em Java Implementar a interface de captação de voz em C#

20 Casos de uso
21 Montagem: robô Lego Digital Designer para a elaboração de um modelo virtual do robô Modelo inspirado em Benedettelli (2008) Dificuldade na montagem e aquisição de peças


22 Montagem: robô Fonte: Benedettelli (2008, p. 516).

23 Montagem: robô
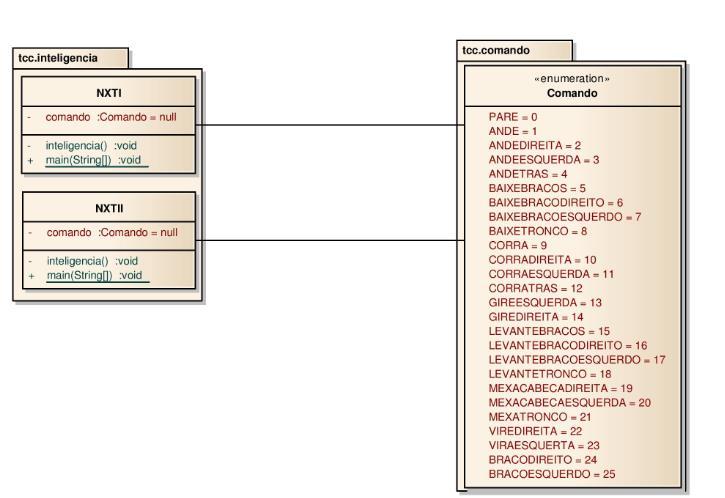
24 Especificação: robô

25
26 Conexão via bluetooth Implementação: robô NXTConnection conexao = Bluetooth.waitForConnection(); conexao.setiomode(nxtconnection.packet); DataInputStream input = conexao.opendatainputstream();
27 Implementação: robô Obtenção do comando falado while (comando!= Comando.PARE) { try { for (int i = 0; i < 9; i++) { comandorecebido = (int) (input.readbyte()); if ((i == 4)) { comando = Comando.values() [comandorecebido]; } } } }
28 Implementação: robô Execução do comando recebido switch (comando) { case ANDE: new Esteira(Comando.ANDE).start(); break;... default: break; }
29 Implementação: robô Movimentação de um servo-motor NXTRegulatedMotor motor = Motor.A; motor.waitcomplete(); motor.setspeed(this.forcamotor); motor.rotate(this.rotacaomotor);
30 Especificação: linguagem Similar a BNF Gera arquivos para o modelo de linguagem Restringe o vocabulário, agilizando o reconhecimento e tornando-o mais confiável
31 Especificação: linguagem INICIO: silencio_inicio COMANDO silencio_fim COMANDO: locomover COMANDO: locomover para direcao COMANDO: mover os membros COMANDO: mover o membro lado COMANDO: mover o tronco COMANDO: membro lado COMANDO: cabeca para ONDE COMANDO: mexer a cabeca para ONDE COMANDO: mexer o tronco COMANDO: virar para ONDE ONDE: direita ONDE: esquerda COMANDO: parar
32 %silencio_inicio <s> sil %silencio_fim </s> sil %locomover ande a~ dz i corra k o R a %mover baixe b a j S i levante l e v a~ ts i %virar gire Z i r i vire v i r i %mexer mexa m e S a %parar pare p a r i %cabeca cabeça k a b e s a %tronco tronco t r o~ k u %membro braço b r a s u %membros braços b r a s u s %direita direita dz i r e j ta %esquerda esquerda e s k e R da %direcao direita dz i r e j ta esquerda e s k e R da trás t r a j s frente f r e~ ts i %lado direito dz i r e j tu esquerdo e s k e R d u %a a a %o o u %os os u s %para para p a r a

33 Compilação: linguagem

34 Especificação: reconhecimento de voz
35
36 Implementação: reconhecimento de voz Inicialização da engine Julius private SREngine engine = null;... engine = new SREngine(@".\LaPSAM\LaPSAM1.5.jconf"); engine.startrecognition();
37 Implementação: reconhecimento de voz Passagem do comando reconhecido para o robô if (result.getconfidence() > 0.80) { settextboxtext(result.getconfidence() + " " + result.getuterrance() + "\n"); switch (result.getuterrance()) { <s> pare </s>": mandarmenssagem( bluetoothconnectionnxti, 0); mandarmenssagem( bluetoothconnectionnxtii, 0); break;... default: break; } }

38 Operacionalidade da Implementação
39 Resultados e Discussões Elaboração da linguagem para controle do robô Funcionamento do programa Grau de confiança na sentença Montagem do robô
40 Resultados e Discussões Característica/ferramenta LOUZADA (2010) BARCELOS et al. (2008) trabalho desenvolvido reconhecimento usando engine Julius X X reconhecimento usando IBM ViaVoice X reconhecimento nativo X necessita de treinamento X independente de locutor X X X interage com meio físico X X linguagem restrita X X X X reconhecimento de fala contínua X
41 Conclusões Elaboração de aplicação para reconhecimento de voz Controle de robô por voz Elaboração da linguagem para controle do robô Envio de comandos para o robô
42 Sugestões Aumentar o vocabulário, para permitir a passagem de parâmetro Utilizar os sensores do Lego NXT Portar o reconhecimento de voz para o Lego NXT Desenvolver a aplicação para a comunicação com Arduino

43 Sugestões Criar linguagem para outros tipos de robô, como bípedes e rastejadores Criar um ambiente para ensinar programação utilizando o Lego NXT e controle por voz
44 Demonstração
ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino. Aluna: Juliana Carolina Batista Orientadora: Joyce Martins
 ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino Aluna: Juliana Carolina Batista Orientadora: Joyce Martins Roteiro Introdução Objetivo Geral Objetivos Específicos Fundamentação
ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino Aluna: Juliana Carolina Batista Orientadora: Joyce Martins Roteiro Introdução Objetivo Geral Objetivos Específicos Fundamentação
ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS
 CAMPUS DISTRITO ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Objetivo Geral Luan Leonardo Vieira de Moraes 1 Prof. Dr. José Pinheiro de Queiroz
CAMPUS DISTRITO ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Objetivo Geral Luan Leonardo Vieira de Moraes 1 Prof. Dr. José Pinheiro de Queiroz
Protótipo de Software de Reconhecimento de Voz Para Navegação em Jogos, Utilizando Rede Neural Artificial
 Protótipo de Software de Reconhecimento de Voz Para Navegação em Jogos, Utilizando Rede Neural Artificial Orientando: Derlei Brancher Orientador: Prof. Jacques Robert Heckmann - Mestre 1. Introdução Roteiro
Protótipo de Software de Reconhecimento de Voz Para Navegação em Jogos, Utilizando Rede Neural Artificial Orientando: Derlei Brancher Orientador: Prof. Jacques Robert Heckmann - Mestre 1. Introdução Roteiro
Aplicativo para auxiliar crianças autistas no desenvolvimento e aquisição da linguagem
 Aplicativo para auxiliar crianças autistas no desenvolvimento e aquisição da linguagem Aluna: Gielez Feldhaus Goulart Orientadora: Joyce Martins Motivação Objetivos Roteiro Fundamentação teórica Trabalhos
Aplicativo para auxiliar crianças autistas no desenvolvimento e aquisição da linguagem Aluna: Gielez Feldhaus Goulart Orientadora: Joyce Martins Motivação Objetivos Roteiro Fundamentação teórica Trabalhos
ESTABELECIMENTO DE ROTAS PARA AR.DRONE UTILIZANDO DELPHI XE 10
 ESTABELECIMENTO DE ROTAS PARA AR.DRONE UTILIZANDO DELPHI XE 10 Aluno(a): Rafael Ronaldo Rahn Orientador: Mauro Marcelo Mattos Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos Desenvolvimento
ESTABELECIMENTO DE ROTAS PARA AR.DRONE UTILIZANDO DELPHI XE 10 Aluno(a): Rafael Ronaldo Rahn Orientador: Mauro Marcelo Mattos Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos Desenvolvimento
Sistema para automação e controle residencial via Twitter
 Sistema para automação e controle residencial via Twitter Eduardo Felippi Gadotti Orientador: Miguel Alexandre Wisintainer Roteiro da apresentação 1. Introdução e objetivos 2. Fundamentação teórica 3.
Sistema para automação e controle residencial via Twitter Eduardo Felippi Gadotti Orientador: Miguel Alexandre Wisintainer Roteiro da apresentação 1. Introdução e objetivos 2. Fundamentação teórica 3.
VISEDU: INTERFACE DE USUÁRIO TANGÍVEL UTILIZANDO REALIDADE AUMENTADA
 VISEDU: INTERFACE DE USUÁRIO TANGÍVEL UTILIZANDO REALIDADE AUMENTADA Aluno: Antônio Marco da Silva Orientador: Dalton Solano dos Reis, M. Sc. Introdução Objetivos Roteiro Fundamentação Teórica Trabalhos
VISEDU: INTERFACE DE USUÁRIO TANGÍVEL UTILIZANDO REALIDADE AUMENTADA Aluno: Antônio Marco da Silva Orientador: Dalton Solano dos Reis, M. Sc. Introdução Objetivos Roteiro Fundamentação Teórica Trabalhos
MJ3I- PA - AMBIENTE VIRTUAL 3D PARA VISUALIZAÇÃO DE BRAÇOS ARTICULADOS NO IOS
 MJ3I- PA - AMBIENTE VIRTUAL 3D PARA VISUALIZAÇÃO DE BRAÇOS ARTICULADOS NO IOS Heitor Augusto Schmitt Prof. Dalton S. dos Reis FURB - Universidade Regional de Blumenau DSC - Departamento de Sistemas e Computação
MJ3I- PA - AMBIENTE VIRTUAL 3D PARA VISUALIZAÇÃO DE BRAÇOS ARTICULADOS NO IOS Heitor Augusto Schmitt Prof. Dalton S. dos Reis FURB - Universidade Regional de Blumenau DSC - Departamento de Sistemas e Computação
PROCESSAMENTO DIRIGIDO DE ROTAS ATRAVÉS DE TEXTO-FALA
 PROCESSAMENTO DIRIGIDO DE ROTAS ATRAVÉS DE TEXTO-FALA Adriano Flach de Araújo Profa. Joyce Martins, Mestre Orientadora FURB 2012/1 Roteiro Introdução Objetivos Fundamentação teórica Desenvolvimento do
PROCESSAMENTO DIRIGIDO DE ROTAS ATRAVÉS DE TEXTO-FALA Adriano Flach de Araújo Profa. Joyce Martins, Mestre Orientadora FURB 2012/1 Roteiro Introdução Objetivos Fundamentação teórica Desenvolvimento do
CONTROLE POR VOZ UTILIZANDO A ENGINE JULIUS COM FALA CONTÍNUA
 UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIA DA COMPUTAÇÃO BACHARELADO CONTROLE POR VOZ UTILIZANDO A ENGINE JULIUS COM FALA CONTÍNUA DEIVID GEOVANI SANT ANA BLUMENAU
UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIA DA COMPUTAÇÃO BACHARELADO CONTROLE POR VOZ UTILIZANDO A ENGINE JULIUS COM FALA CONTÍNUA DEIVID GEOVANI SANT ANA BLUMENAU
INTRODUÇÃO AO ARDUINO DUE, CANAL DIGITAL, FUNÇÃO DELAY
 INTRODUÇÃO AO ARDUINO DUE, CANAL DIGITAL, FUNÇÃO DELAY INTRODUÇÃO A Plataforma Arduino é considerada plataforma aberta, ou seja, qualquer pessoa pode efetuar uma melhoria em um código, biblioteca e disponibilizá-la
INTRODUÇÃO AO ARDUINO DUE, CANAL DIGITAL, FUNÇÃO DELAY INTRODUÇÃO A Plataforma Arduino é considerada plataforma aberta, ou seja, qualquer pessoa pode efetuar uma melhoria em um código, biblioteca e disponibilizá-la
PROTÓTIPO DE SISTEMA DE CAPTURA DE DADOS MULTIPONTO WIRELESS PARA CONTROLE DE CONSUMO DE ÁGUA
 PROTÓTIPO DE SISTEMA DE CAPTURA DE DADOS MULTIPONTO WIRELESS PARA CONTROLE DE CONSUMO DE ÁGUA Acadêmico: Benno Martim Schubert Orientador: Miguel Alexandre Wisintainer ROTEIRO Introdução Objetivos do trabalho
PROTÓTIPO DE SISTEMA DE CAPTURA DE DADOS MULTIPONTO WIRELESS PARA CONTROLE DE CONSUMO DE ÁGUA Acadêmico: Benno Martim Schubert Orientador: Miguel Alexandre Wisintainer ROTEIRO Introdução Objetivos do trabalho
VISEDU-CG: Aplicação Didática para Visualizar Material Educacional, Módulo de Computação Gráfica
 VISEDU-CG: Aplicação Didática para Visualizar Material Educacional, Módulo de Computação Gráfica James Perkison Montibeler Orientador: Dalton Solano dos Reis FURB Universidade Regional de Blumenau Grupo
VISEDU-CG: Aplicação Didática para Visualizar Material Educacional, Módulo de Computação Gráfica James Perkison Montibeler Orientador: Dalton Solano dos Reis FURB Universidade Regional de Blumenau Grupo
SISTEMA PARA A GESTÃO DE RESERVAS DOS EQUIPAMENTOS DE UMA EMPRESA DE TI COM INTEGRAÇÃO DOS USUÁRIOS DO ACTIVE DIRECTORY
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO SISTEMA PARA A GESTÃO DE RESERVAS DOS EQUIPAMENTOS DE UMA EMPRESA DE TI COM INTEGRAÇÃO DOS USUÁRIOS DO ACTIVE DIRECTORY Eduardo Augusto
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO SISTEMA PARA A GESTÃO DE RESERVAS DOS EQUIPAMENTOS DE UMA EMPRESA DE TI COM INTEGRAÇÃO DOS USUÁRIOS DO ACTIVE DIRECTORY Eduardo Augusto
Linguagem de Programação III
 Linguagem de Programação III Aula-5 Estruturas de Decisão e Controle. Arrays em Java Prof. Esbel Tomás Valero Orellana Até Aqui Modelos e POO Classes e sua implementação em Java Encapsulamento Tipos de
Linguagem de Programação III Aula-5 Estruturas de Decisão e Controle. Arrays em Java Prof. Esbel Tomás Valero Orellana Até Aqui Modelos e POO Classes e sua implementação em Java Encapsulamento Tipos de
SOFTWARE DE APOIO A GESTÃO DE SOLICITAÇÃO DE MUDANÇAS
 Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Trabalho de Conclusão de Curso Ciências da Computação SOFTWARE DE APOIO A GESTÃO DE SOLICITAÇÃO DE MUDANÇAS AS Acadêmico: Fabricio
Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Trabalho de Conclusão de Curso Ciências da Computação SOFTWARE DE APOIO A GESTÃO DE SOLICITAÇÃO DE MUDANÇAS AS Acadêmico: Fabricio
Vocal: Assistente para o uso de smartphones operado por voz
 Departamento de Sistemas e Computação FURB Curso de Ciência da Computação Trabalho de Conclusão de Curso 2016/1 Vocal: Assistente para o uso de smartphones operado por voz Acadêmico: Eli Tonny de Souza
Departamento de Sistemas e Computação FURB Curso de Ciência da Computação Trabalho de Conclusão de Curso 2016/1 Vocal: Assistente para o uso de smartphones operado por voz Acadêmico: Eli Tonny de Souza
SISTEMA DISTRIBUÍDO PARA GERENCIAMENTO DE LIBERAÇÃO DE RELEASES DE SOFTWARE
 SISTEMA DISTRIBUÍDO PARA GERENCIAMENTO DE LIBERAÇÃO DE RELEASES DE SOFTWARE 12/2013 Acadêmico: Rogério Mello Vanti Orientador: Paulo Fernando da Silva Roteiro Introdução Fundamentação teórica Resultados
SISTEMA DISTRIBUÍDO PARA GERENCIAMENTO DE LIBERAÇÃO DE RELEASES DE SOFTWARE 12/2013 Acadêmico: Rogério Mello Vanti Orientador: Paulo Fernando da Silva Roteiro Introdução Fundamentação teórica Resultados
Processamento distribuído em ambiente peer-to-peer
 Processamento distribuído em ambiente peer-to-peer Alexandre Helfrich Orientando Prof. Paulo Fernando da Silva Orientador Roteiro Introdução e Objetivos Fundamentação Teórica, Conceitos e Contexto Atual
Processamento distribuído em ambiente peer-to-peer Alexandre Helfrich Orientando Prof. Paulo Fernando da Silva Orientador Roteiro Introdução e Objetivos Fundamentação Teórica, Conceitos e Contexto Atual
Tipos, Literais, Operadores
 Tipos, Literais, Operadores Identificadores São palavras utilizadas para nomear variáveis, métodos e classes Na linguagem Java, o identificador sempre começa por letra, sublinhado(_) ou cifrão ($) Não
Tipos, Literais, Operadores Identificadores São palavras utilizadas para nomear variáveis, métodos e classes Na linguagem Java, o identificador sempre começa por letra, sublinhado(_) ou cifrão ($) Não
Tipos, Literais, Operadores
 Tipos, Literais, Operadores Identificadores São palavras utilizadas para nomear variáveis, métodos e classes Na linguagem Java, o identificador sempre começa por letra, sublinhado(_) ou cifrão ($) Não
Tipos, Literais, Operadores Identificadores São palavras utilizadas para nomear variáveis, métodos e classes Na linguagem Java, o identificador sempre começa por letra, sublinhado(_) ou cifrão ($) Não
FURBMOBILE: UMA APLICAÇÃO PARA VISUALIZAÇÃO E ACOMPANHAMENTO DA MATRIZ CURRICULAR
 Departamento de Sistemas e Computação FURB Curso de Ciência da Computação Trabalho de Conclusão de Curso 2016/1 FURBMOBILE: UMA APLICAÇÃO PARA VISUALIZAÇÃO E ACOMPANHAMENTO DA MATRIZ CURRICULAR Acadêmico:
Departamento de Sistemas e Computação FURB Curso de Ciência da Computação Trabalho de Conclusão de Curso 2016/1 FURBMOBILE: UMA APLICAÇÃO PARA VISUALIZAÇÃO E ACOMPANHAMENTO DA MATRIZ CURRICULAR Acadêmico:
SISTEMA PARA AUTOMATIZAÇÃO RESIDENCIAL CONTROLADO POR
 SISTEMA PARA AUTOMATIZAÇÃO RESIDENCIAL CONTROLADO POR COMANDO DE VOZ Ronaldo Rother Prof. Francisco Adell Péricas, Orientador Roteiro da Apresentação 1. Introdução e Objetivos 2. Fundamentação teórica
SISTEMA PARA AUTOMATIZAÇÃO RESIDENCIAL CONTROLADO POR COMANDO DE VOZ Ronaldo Rother Prof. Francisco Adell Péricas, Orientador Roteiro da Apresentação 1. Introdução e Objetivos 2. Fundamentação teórica
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO.
 Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Aula 2. Objetivos. Encapsulamento na linguagem Java; Utilizando a referência this.
 Aula 2 Objetivos Encapsulamento na linguagem Java; Utilizando a referência this. Encapsulamento, data hiding é um conceito bastante importante em orientação a objetos. É utilizado para restringir o acesso
Aula 2 Objetivos Encapsulamento na linguagem Java; Utilizando a referência this. Encapsulamento, data hiding é um conceito bastante importante em orientação a objetos. É utilizado para restringir o acesso
VISEDU: JOGO DE REALIDADADE AUMENTADA DE LETRAS COM CONTEÚDO DINÂMICO
 VISEDU: JOGO DE REALIDADADE AUMENTADA DE LETRAS COM CONTEÚDO DINÂMICO Aluna: Vivian de Lima Panzenhagen Orientador: Prof. Dalton Solano dos Reis, M. Sc Roteiro Introdução Objetivos Fundamentação Teórica
VISEDU: JOGO DE REALIDADADE AUMENTADA DE LETRAS COM CONTEÚDO DINÂMICO Aluna: Vivian de Lima Panzenhagen Orientador: Prof. Dalton Solano dos Reis, M. Sc Roteiro Introdução Objetivos Fundamentação Teórica
Introdução do Arduino para aquisição de dados e controle de instrumentos
 Introdução do Arduino para aquisição de dados e controle de instrumentos Rafael Pezzi Centro de Tecnolocia Acadêmica Instituto de Física - UFRGS Novembro de 2018 Roteiro O que é o Arduino? Especificações
Introdução do Arduino para aquisição de dados e controle de instrumentos Rafael Pezzi Centro de Tecnolocia Acadêmica Instituto de Física - UFRGS Novembro de 2018 Roteiro O que é o Arduino? Especificações
Paradigmas de Programação. Java First-Tier: Aplicações. Orientação a Objetos em Java (I) Nomenclatura. Paradigma OO. Nomenclatura
 Nomenclatura. Paradigma OO. Nomenclatura") Java First-Tier: Aplicações Orientação a Objetos em Java (I) Paradigmas de Programação Programação Funcional Programação Procedural Programação Orientada por Objetos Grupo de Linguagens de Programação
Java First-Tier: Aplicações Orientação a Objetos em Java (I) Paradigmas de Programação Programação Funcional Programação Procedural Programação Orientada por Objetos Grupo de Linguagens de Programação
MOBILE-FURBOT: UMA VERSÃO DO FURBOT PARA CRIAÇÃO DE JOGOS EM DISPOSITIVOS MÓVEIS
 MOBILE-FURBOT: UMA VERSÃO DO FURBOT PARA CRIAÇÃO DE JOGOS EM DISPOSITIVOS MÓVEIS Daniel Severo Estrázulas Mauro Marcelo Mattos - Orientador Roteiro da Apresentação: Introdução Objetivo Fundamentação teórica
MOBILE-FURBOT: UMA VERSÃO DO FURBOT PARA CRIAÇÃO DE JOGOS EM DISPOSITIVOS MÓVEIS Daniel Severo Estrázulas Mauro Marcelo Mattos - Orientador Roteiro da Apresentação: Introdução Objetivo Fundamentação teórica
SISTEMA DE NAVEGAÇÃO PARA UM ROBÔ BASEADO EM SENSOR MAGNÉTICO
 SISTEMA DE NAVEGAÇÃO PARA UM ROBÔ BASEADO EM SENSOR MAGNÉTICO Alessandra Mayara Buso de Souza (PIBIC/CNPq-UTFPR), e-mail: alessandrabuso@hotmail.com, Marcos Vallim (Orientador), e-mail: mvallim@utfpr.edu.br.
SISTEMA DE NAVEGAÇÃO PARA UM ROBÔ BASEADO EM SENSOR MAGNÉTICO Alessandra Mayara Buso de Souza (PIBIC/CNPq-UTFPR), e-mail: alessandrabuso@hotmail.com, Marcos Vallim (Orientador), e-mail: mvallim@utfpr.edu.br.
Conceitos de Linguagens de Programação - Características. Paavo Soeiro
 Conceitos de Linguagens de Programação - Características Paavo Soeiro Motivação Para que possa escolher uma linguagem apropriada ao problema. Melhorar o entendimento da linguagem utilizada. Facilitar o
Conceitos de Linguagens de Programação - Características Paavo Soeiro Motivação Para que possa escolher uma linguagem apropriada ao problema. Melhorar o entendimento da linguagem utilizada. Facilitar o
Ferramenta de auxílio acadêmico utilizando chatterbot. Aluna: Camila Viviani Martins Orientadora: Joyce Martins
 Ferramenta de auxílio acadêmico utilizando chatterbot Aluna: Camila Viviani Martins Orientadora: Joyce Martins Roteiro Introdução Objetivos Fundamentação teórica Trabalhos correlatos Requisitos funcionais
Ferramenta de auxílio acadêmico utilizando chatterbot Aluna: Camila Viviani Martins Orientadora: Joyce Martins Roteiro Introdução Objetivos Fundamentação teórica Trabalhos correlatos Requisitos funcionais
PLANO DE UNIDADE DIDÁTICA- PUD
 Professor: Marcus Vinícius Midena Ramos Coordenação: Ricardo Argenton Ramos Data: 03/08/2010 Página: 1 de 5 EMENTA: Conceitos básicos de linguagens. Histórico, classificação e principais aplicações de
Professor: Marcus Vinícius Midena Ramos Coordenação: Ricardo Argenton Ramos Data: 03/08/2010 Página: 1 de 5 EMENTA: Conceitos básicos de linguagens. Histórico, classificação e principais aplicações de
Acadêmica: Giselle Mafra Schlosser Orientador: Everaldo Artur Grahl
 AVALIAÇÃO DA QUALIDADE DO CÓDIGO FONTE ESCRITO EM PL/SQL Acadêmica: Giselle Mafra Schlosser Orientador: Everaldo Artur Grahl Roteiro Introdução Objetivos do trabalho Fundamentação teórica Desenvolvimento
AVALIAÇÃO DA QUALIDADE DO CÓDIGO FONTE ESCRITO EM PL/SQL Acadêmica: Giselle Mafra Schlosser Orientador: Everaldo Artur Grahl Roteiro Introdução Objetivos do trabalho Fundamentação teórica Desenvolvimento
Linguagens de Domínio Específico
 Linguagens de Domínio Específico Fabio Mascarenhas 2017.1 http://www.dcc.ufrj.br/~fabiom/dsl Por que DSLs? Melhorar a produtividade dos programadores input =~ /\d{3}-\d{3}-\d{4}/ Facilitar a escrita e
Linguagens de Domínio Específico Fabio Mascarenhas 2017.1 http://www.dcc.ufrj.br/~fabiom/dsl Por que DSLs? Melhorar a produtividade dos programadores input =~ /\d{3}-\d{3}-\d{4}/ Facilitar a escrita e
Palavras Reservadas da Linguagem Java
 Palavras Reservadas da Linguagem Java Palavras Reservadas da Linguagem Java: Categorias Tipos de dados primitivos Literais Pseudo-variáveis Desvio e controle de fluxo Pacotes Exceções Modificadores de
Palavras Reservadas da Linguagem Java Palavras Reservadas da Linguagem Java: Categorias Tipos de dados primitivos Literais Pseudo-variáveis Desvio e controle de fluxo Pacotes Exceções Modificadores de
Microcontroladores e Robótica
 Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
DUMA: AUTOMAÇÃO DE FICHA TÉCNICA PARA EMPRESA DE PEQUENO E MÉDIO PORTE
 Curso de Sistemas de Informação Bacharelado DUMA: AUTOMAÇÃO DE FICHA TÉCNICA PARA EMPRESA DE PEQUENO E MÉDIO PORTE Acadêmica: Ana Cristina Isensee Orientador: Alexander Roberto Valdameri Roteiro 1. Introdução
Curso de Sistemas de Informação Bacharelado DUMA: AUTOMAÇÃO DE FICHA TÉCNICA PARA EMPRESA DE PEQUENO E MÉDIO PORTE Acadêmica: Ana Cristina Isensee Orientador: Alexander Roberto Valdameri Roteiro 1. Introdução
GERADOR DE INTERFACES GRÁFICAS PARA IOS GABRIEL SEBASTIAN RAMIREZ JOYCE MARTINS
 GERADOR DE INTERFACES GRÁFICAS PARA IOS GABRIEL SEBASTIAN RAMIREZ JOYCE MARTINS Introdução Objetivos Fundamentação teórica Especificação Implementação Operacionalidade Resultados e discussão Conclusão
GERADOR DE INTERFACES GRÁFICAS PARA IOS GABRIEL SEBASTIAN RAMIREZ JOYCE MARTINS Introdução Objetivos Fundamentação teórica Especificação Implementação Operacionalidade Resultados e discussão Conclusão
FINDCAR: RASTREADOR VEICULAR UTILIZANDO OPENWRT
 FINDCAR: RASTREADOR VEICULAR UTILIZANDO OPENWRT Aluno(a): Nykolas Eduardo Antonioli Baumgarten Orientador: Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos
FINDCAR: RASTREADOR VEICULAR UTILIZANDO OPENWRT Aluno(a): Nykolas Eduardo Antonioli Baumgarten Orientador: Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos
CIDADÃO FISCAL: APLICATIVO PARA A ABERTURA E ACOMPANHAMENTO DE PROCESSOS NO SETOR DE OUVIDORIA DA PREFEITURA MUNICIPAL DE BLUMENAU
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO CIDADÃO FISCAL: APLICATIVO PARA A ABERTURA E ACOMPANHAMENTO DE PROCESSOS NO SETOR DE OUVIDORIA DA PREFEITURA MUNICIPAL DE
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO CIDADÃO FISCAL: APLICATIVO PARA A ABERTURA E ACOMPANHAMENTO DE PROCESSOS NO SETOR DE OUVIDORIA DA PREFEITURA MUNICIPAL DE
SISTEMA DE MONITORAMENTO DE REDES SOCIAIS DIGITAIS UTILIZANDO REDES NEURAIS ARTIFICIAIS
 FUNDAÇÃO UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO SISTEMA DE MONITORAMENTO DE REDES SOCIAIS DIGITAIS UTILIZANDO REDES NEURAIS ARTIFICIAIS Marco Aurélio Beber Orientador: Roberto
FUNDAÇÃO UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO SISTEMA DE MONITORAMENTO DE REDES SOCIAIS DIGITAIS UTILIZANDO REDES NEURAIS ARTIFICIAIS Marco Aurélio Beber Orientador: Roberto
Padrão para Códigos Java
 Padrão para Códigos Java Rafael G. M. Souza 1 rafael.gorski@gmail.com Abstract. A source code standard helps development team to have a common code style to improve maintenance and refactoring of the code.
Padrão para Códigos Java Rafael G. M. Souza 1 rafael.gorski@gmail.com Abstract. A source code standard helps development team to have a common code style to improve maintenance and refactoring of the code.
WEBIDE 2.0 Um ambiente web usando Gwt-Ext para acompanhamento e desenvolvimento de exercícios de programação
 WEBIDE 2.0 Um ambiente web usando Gwt-Ext para acompanhamento e desenvolvimento de exercícios de programação Rafael Adriano Orientador Prof. Adilson Vahldick Roteiro Introdução Fundamentação teórica Desenvolvimento
WEBIDE 2.0 Um ambiente web usando Gwt-Ext para acompanhamento e desenvolvimento de exercícios de programação Rafael Adriano Orientador Prof. Adilson Vahldick Roteiro Introdução Fundamentação teórica Desenvolvimento
1) DADOS DA OBRA: Programando em Java 2 Teoria e Aplicações Rui Rossi dos Santos 2004 Axcel Books (
 DADOS DA OBRA: Programando em Java 2 Teoria e Aplicações Rui Rossi dos Santos 2004 Axcel Books (") 1) DADOS DA OBRA: Título: Programando em Java 2 Teoria e Aplicações Autor: Rui Rossi dos Santos Ano: 2004 Editora: Axcel Books (http://www.axcel.com.br) Páginas: 580 Encadernação: Capa dura 2) DESCRIÇÃO
1) DADOS DA OBRA: Título: Programando em Java 2 Teoria e Aplicações Autor: Rui Rossi dos Santos Ano: 2004 Editora: Axcel Books (http://www.axcel.com.br) Páginas: 580 Encadernação: Capa dura 2) DESCRIÇÃO
Acadêmico: Samuel Y. Deschamps Orientador: Prof. Jacques R. Heckmann
 Acadêmico: Samuel Y. Deschamps Orientador: Prof. Jacques R. Heckmann Roteiro Introdução Problema a ser resolvido e objetivos Fundamentação Teórica ORM, RTTI, Custom Attributes, Nullable Desenvolvimento
Acadêmico: Samuel Y. Deschamps Orientador: Prof. Jacques R. Heckmann Roteiro Introdução Problema a ser resolvido e objetivos Fundamentação Teórica ORM, RTTI, Custom Attributes, Nullable Desenvolvimento
Protótipo de um robô rastreador de objetos. Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer
 Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
Protótipo de um robô rastreador de objetos Orientando: Emerson de Oliveira Orientador : Miguel Wisintainer Estrutura da apresentação Introdução Processamento e análise de imagens Redes neurais e reconhecimento
CONTROLE DE TRÁFEGO FERROVIÁRIO UTILIZANDO MICROCONTROLADOR PIC16F628A
 UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIAS DA COMPUTAÇÃO CONTROLE DE TRÁFEGO FERROVIÁRIO UTILIZANDO MICROCONTROLADOR PIC16F628A Acadêmico: Andrey Starke Sardo
UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIAS DA COMPUTAÇÃO CONTROLE DE TRÁFEGO FERROVIÁRIO UTILIZANDO MICROCONTROLADOR PIC16F628A Acadêmico: Andrey Starke Sardo
OBD-JRP Monitoramento Veicular com Java e Raspberry Pi. Ricardo Artur Staroski Miguel Alexandre Wisintainer
 OBD-JRP Monitoramento Veicular com Java e Raspberry Pi Aluno: Orientador: Ricardo Artur Staroski Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação teórica Trabalhos correlatos Requisitos
OBD-JRP Monitoramento Veicular com Java e Raspberry Pi Aluno: Orientador: Ricardo Artur Staroski Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação teórica Trabalhos correlatos Requisitos
CIÊNCIA DA COMPUTAÇÃO - LINGUAGEM DE PROGRAMAÇÃO II REVISÃO POO
 REVISÃO POO INTRODUÇÃO À LINGUAGEM JAVA CRIANDO CLASSES EM JAVA Convenção de Nomes em Java Classes iniciam com letras maiúsculas Métodos, atributos e variáveis locais iniciam com minúsculas. Declaração
REVISÃO POO INTRODUÇÃO À LINGUAGEM JAVA CRIANDO CLASSES EM JAVA Convenção de Nomes em Java Classes iniciam com letras maiúsculas Métodos, atributos e variáveis locais iniciam com minúsculas. Declaração
COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT
 COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT Brenda Kieling Balbinotti 1 ; Marcelo Massoco Cendron 2 ; Nicole Dalmolin Kochan 3 INTRODUÇÃO A programação
COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT Brenda Kieling Balbinotti 1 ; Marcelo Massoco Cendron 2 ; Nicole Dalmolin Kochan 3 INTRODUÇÃO A programação
Instituto Superior de Engenharia de Lisboa
 Instituto Superior de Engenharia de Lisboa Introdução à Programação (PG) Docente: Pedro Viçoso Fazenda (pfazenda@cedet.isel.ipl.pt) Professor Responsável: Pedro Alexandre Pereira (palex@cc.isel.ipl.pt)
Instituto Superior de Engenharia de Lisboa Introdução à Programação (PG) Docente: Pedro Viçoso Fazenda (pfazenda@cedet.isel.ipl.pt) Professor Responsável: Pedro Alexandre Pereira (palex@cc.isel.ipl.pt)
Ferramenta de apoio a. fonte em linguagem C++ baseado em padrões de legibilidade
 Ferramenta de apoio a reestruturação de código c fonte em linguagem C++ baseado em padrões de legibilidade Denis Alberto Dalmolin Orientador: Everaldo Artur Grahl Roteiro de Apresentação Introdução A Linguagem
Ferramenta de apoio a reestruturação de código c fonte em linguagem C++ baseado em padrões de legibilidade Denis Alberto Dalmolin Orientador: Everaldo Artur Grahl Roteiro de Apresentação Introdução A Linguagem
Sistema para gerenciamento de atividades utilizando a técnica Kanban aplicado a desenvolvimento de software
 Sistema para gerenciamento de atividades utilizando a técnica Kanban aplicado a desenvolvimento de software Aluno: Gustavo Baehr Orientador: Samuel Cristhian Schwebel Roteiro Introdução; Objetivos; Fundamentação
Sistema para gerenciamento de atividades utilizando a técnica Kanban aplicado a desenvolvimento de software Aluno: Gustavo Baehr Orientador: Samuel Cristhian Schwebel Roteiro Introdução; Objetivos; Fundamentação
SISTEMA DE E-COMMERCE PARA PEQUENOS VAREJISTAS. Aluno: Leonardo Rossetti Orientador: Roberto Heinzle
 SISTEMA DE E-COMMERCE PARA PEQUENOS VAREJISTAS Aluno: Leonardo Rossetti Orientador: Roberto Heinzle Roteiro Introdução e Objetivos Trabalhos correlatos Requisitos Especificação Implementação Operacionalidade
SISTEMA DE E-COMMERCE PARA PEQUENOS VAREJISTAS Aluno: Leonardo Rossetti Orientador: Roberto Heinzle Roteiro Introdução e Objetivos Trabalhos correlatos Requisitos Especificação Implementação Operacionalidade
CURSO BÁSICO DE PROGRAMAÇÃO AULA 10. Revisão Aula Anterior Laços de Repetição While; Do-While; For.
 CURSO BÁSICO DE PROGRAMAÇÃO AULA 10 Revisão Aula Anterior Laços de Repetição While; Do-While; For. Estrutura de Decisão IF Portugol se () { se () { senao{
CURSO BÁSICO DE PROGRAMAÇÃO AULA 10 Revisão Aula Anterior Laços de Repetição While; Do-While; For. Estrutura de Decisão IF Portugol se () { se () { senao{
Ferramenta de apoio a identificação de eventos utilizando Linguagem Natural. Aluno: Ricardo Tomelin Orientador: Everaldo Artur Grahl
 Ferramenta de apoio a identificação de eventos utilizando Linguagem Natural Aluno: Ricardo Tomelin Orientador: Everaldo Artur Grahl Roteiro 1. Introdução 2. Objetivos 3. Análise Essencial de Sistemas 4.
Ferramenta de apoio a identificação de eventos utilizando Linguagem Natural Aluno: Ricardo Tomelin Orientador: Everaldo Artur Grahl Roteiro 1. Introdução 2. Objetivos 3. Análise Essencial de Sistemas 4.
Aprendendo Braille: O Ensino do Sistema Braille com o uso do Tagarela
 Aprendendo Braille: O Ensino do Sistema Braille com o uso do Tagarela Acadêmico: Lucas Cazagranda Orientador: Dalton Solano dos Reis FURB Fundação Universidade Regional de Blumenau DSC Departamento de
Aprendendo Braille: O Ensino do Sistema Braille com o uso do Tagarela Acadêmico: Lucas Cazagranda Orientador: Dalton Solano dos Reis FURB Fundação Universidade Regional de Blumenau DSC Departamento de
PARTE I - IDENTIFICAÇÃO
 Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
QEA Integração entre a ferramenta para desenvolvimento de sistemas web Quellon e o Enterprise Architect
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO QEA Integração entre a ferramenta para desenvolvimento de sistemas web Quellon e o Enterprise Architect Bruna Emerich Dall Olivo de Souza
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO QEA Integração entre a ferramenta para desenvolvimento de sistemas web Quellon e o Enterprise Architect Bruna Emerich Dall Olivo de Souza
PROTÓTIPO PARA SUMARIZAÇÃO AUTOMÁTICA DE TEXTOS ESCRITOS EM LÍNGUA PORTUGUESA ALEXANDRE BUSARELLO JOYCE MARTINS
 PROTÓTIPO PARA SUMARIZAÇÃO AUTOMÁTICA DE TEXTOS ESCRITOS EM LÍNGUA PORTUGUESA ALEXANDRE BUSARELLO JOYCE MARTINS Roteiro Introdução Objetivos Fundamentação Teórica Especificação Implementação Operacionalidade
PROTÓTIPO PARA SUMARIZAÇÃO AUTOMÁTICA DE TEXTOS ESCRITOS EM LÍNGUA PORTUGUESA ALEXANDRE BUSARELLO JOYCE MARTINS Roteiro Introdução Objetivos Fundamentação Teórica Especificação Implementação Operacionalidade
MANIPULADOR ROBÓTICO DIDÁTICO
 MANIPULADOR ROBÓTICO DIDÁTICO Alexandre Silva de Lima(1); Maria Cristina José Soares(2); Sildenir Alves Ribeiro(3) (CEFET-RJ, Centro Federal de Educação Tecnológica Celso Suckow da Fonseca-RJ, alexandre.silva.lima@cefet-rj.br
MANIPULADOR ROBÓTICO DIDÁTICO Alexandre Silva de Lima(1); Maria Cristina José Soares(2); Sildenir Alves Ribeiro(3) (CEFET-RJ, Centro Federal de Educação Tecnológica Celso Suckow da Fonseca-RJ, alexandre.silva.lima@cefet-rj.br
TÍTULO: AUTOMAÇÃO COM ELETRÔNICA EMBARCA APLICADA A ACESSIBILIDADE PARA CADEIRANTES
 16 TÍTULO: AUTOMAÇÃO COM ELETRÔNICA EMBARCA APLICADA A ACESSIBILIDADE PARA CADEIRANTES CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE ENIAC AUTOR(ES):
16 TÍTULO: AUTOMAÇÃO COM ELETRÔNICA EMBARCA APLICADA A ACESSIBILIDADE PARA CADEIRANTES CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE ENIAC AUTOR(ES):
COBOL Query 1.0. Ferramenta para extração de dados em arquivos COBOL. Aluno: André Luiz Jacinto Orientador: Adilson Vahldick
 COBOL Query 1.0 Ferramenta para extração de dados em arquivos COBOL Aluno: André Luiz Jacinto Orientador: Adilson Vahldick Roteiro Introdução Objetivos do trabalho Fundamentação teórica Desenvolvimento
COBOL Query 1.0 Ferramenta para extração de dados em arquivos COBOL Aluno: André Luiz Jacinto Orientador: Adilson Vahldick Roteiro Introdução Objetivos do trabalho Fundamentação teórica Desenvolvimento
UTILIZANDO ROBÔTICA NO ENSINO DE PROGRAMAÇÃO DE COMPUTADORES UTILIZAÇÃO DO ROBÔ LEGO MINDSTORMS
 INTRODUÇÃO A PROGRAMAÇÃO UTILIZANDO ROBÔTICA NO ENSINO DE PROGRAMAÇÃO DE COMPUTADORES UTILIZAÇÃO DO ROBÔ LEGO MINDSTORMS ROTEIRO DO CURSO DE PROGRAMAÇÃO Introdução ao ambiente NXT Princípios da programação
INTRODUÇÃO A PROGRAMAÇÃO UTILIZANDO ROBÔTICA NO ENSINO DE PROGRAMAÇÃO DE COMPUTADORES UTILIZAÇÃO DO ROBÔ LEGO MINDSTORMS ROTEIRO DO CURSO DE PROGRAMAÇÃO Introdução ao ambiente NXT Princípios da programação
Aula 3 Programação. LEGO NXT-G
 Portfolio MEEC 1 Aula 3 Programação. LEGO NXT-G Objectivo Introdução à programação do LEGO NXT-2, que será usado no lab. Portfolio MEEC 2 O que é um programa de computador? Conjunto de instruções que visam
Portfolio MEEC 1 Aula 3 Programação. LEGO NXT-G Objectivo Introdução à programação do LEGO NXT-2, que será usado no lab. Portfolio MEEC 2 O que é um programa de computador? Conjunto de instruções que visam
Curso de C. Introdução by Arnaldo V. Moura e Daniel F. Ferber 3/10/ :43 AM
 Curso de C Introdução 1 Introdução Roteiro: Recordando Algoritmos Linguagem de Programação O computador Instruções de Máquina Níveis de Abstração Compilação 2 Algoritmos Recordando: Algoritmo: conjunto
Curso de C Introdução 1 Introdução Roteiro: Recordando Algoritmos Linguagem de Programação O computador Instruções de Máquina Níveis de Abstração Compilação 2 Algoritmos Recordando: Algoritmo: conjunto
Um Reconhecedor de Voz Livre para Português Brasileiro com Interface de Programação
 Um Reconhecedor de Voz Livre para Português Brasileiro com Interface de Programação Nelson Neto, Carlos Silva, Pedro Batista e Aldebaro Klautau Universidade Federal do Pará (UFPA) Laboratório de Processamento
Um Reconhecedor de Voz Livre para Português Brasileiro com Interface de Programação Nelson Neto, Carlos Silva, Pedro Batista e Aldebaro Klautau Universidade Federal do Pará (UFPA) Laboratório de Processamento
Retrofitting de Robôs. Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
 Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica fetter@eletro.ufrgs.br 1 Introdução Robôs Manipuladores Robôs Industriais Móveis
Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica fetter@eletro.ufrgs.br 1 Introdução Robôs Manipuladores Robôs Industriais Móveis
4. Desenvolvimento e Operacionalidade 5. Resultados e Conclusões 6. Extensões 7. Demonstração do Sistema
 1. Introdução e Objetivos 2. Fundamentação Teórica 3. Especificação do Sistema 4. Desenvolvimento e Operacionalidade 5. Resultados e Conclusões 6. Extensões 7. Demonstração do Sistema Sistemas de Informação
1. Introdução e Objetivos 2. Fundamentação Teórica 3. Especificação do Sistema 4. Desenvolvimento e Operacionalidade 5. Resultados e Conclusões 6. Extensões 7. Demonstração do Sistema Sistemas de Informação
Protótipo tipo de um ambiente virtual distribuído
 Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Departamento de Sistemas e Computação Protótipo tipo de um ambiente virtual distribuído do multiusuário Acadêmico: Leonardo Willrich
Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Departamento de Sistemas e Computação Protótipo tipo de um ambiente virtual distribuído do multiusuário Acadêmico: Leonardo Willrich
Linguagens de Domínio Específico
 Linguagens de Domínio Específico Fabio Mascarenhas 2017.1 http://www.dcc.ufrj.br/~fabiom/dsl Definindo DSLs Linguagem específica de domínio: uma linguagem de programação de computadores de expressividade
Linguagens de Domínio Específico Fabio Mascarenhas 2017.1 http://www.dcc.ufrj.br/~fabiom/dsl Definindo DSLs Linguagem específica de domínio: uma linguagem de programação de computadores de expressividade
Como construir um compilador utilizando ferramentas Java
 Como construir um compilador utilizando ferramentas Java p. 1/2 Como construir um compilador utilizando ferramentas Java Aula 1 - Introdução Prof. Márcio Delamaro delamaro@icmc.usp.br Como construir um
Como construir um compilador utilizando ferramentas Java p. 1/2 Como construir um compilador utilizando ferramentas Java Aula 1 - Introdução Prof. Márcio Delamaro delamaro@icmc.usp.br Como construir um
Sistema de acesso a dispositivos eletrônicos através da TV Digital interativa. Aluno: Rodrigo Brüning Wessler Orientador: Francisco Adell Péricas
 Sistema de acesso a dispositivos eletrônicos através da TV Digital interativa Aluno: Rodrigo Brüning Wessler Orientador: Francisco Adell Péricas Roteiro da Apresentação Introdução Objetivos Fundamentação
Sistema de acesso a dispositivos eletrônicos através da TV Digital interativa Aluno: Rodrigo Brüning Wessler Orientador: Francisco Adell Péricas Roteiro da Apresentação Introdução Objetivos Fundamentação
Universidade Estadual de Mato Grosso do Sul Ciência da Computação Algoritmos e Estruturas de Dados I (AED-I) Prof. Nilton
 Prof. Nilton") Universidade Estadual de Mato Grosso do Sul Ciência da Computação Algoritmos e Estruturas de Dados I (AED-I) Prof. Nilton nilton@comp.uems.br Introdução A linguagem C foi inventada por Dennis Ritchie e
Universidade Estadual de Mato Grosso do Sul Ciência da Computação Algoritmos e Estruturas de Dados I (AED-I) Prof. Nilton nilton@comp.uems.br Introdução A linguagem C foi inventada por Dennis Ritchie e
JAVA. Professor: Bruno Toledo
 JAVA Professor: Bruno Toledo Funcionamento de uma LP Em uma Linguagem de Programação (LP) como C e Pascal, temos o seguinte quadro quando vamos compilar um programa. Código fonte em c Teste.c Gera código
JAVA Professor: Bruno Toledo Funcionamento de uma LP Em uma Linguagem de Programação (LP) como C e Pascal, temos o seguinte quadro quando vamos compilar um programa. Código fonte em c Teste.c Gera código
ANÁLISE DE DADOS DE LINHA DE PRODUÇÃO
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO ANÁLISE DE DADOS DE LINHA DE PRODUÇÃO Allan Marcel Ehrat Prof. Miguel Alexandre Wisintainer, Orientador ROTEIRO DA APRESENTAÇÃO 1.Introdução
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO ANÁLISE DE DADOS DE LINHA DE PRODUÇÃO Allan Marcel Ehrat Prof. Miguel Alexandre Wisintainer, Orientador ROTEIRO DA APRESENTAÇÃO 1.Introdução
HMI: UM MIDDLEWARE PARA OBJETOS DISTRIBUÍDOS SOBRE O PROTOCOLO HTTP
 HMI: UM MIDDLEWARE PARA OBJETOS DISTRIBUÍDOS SOBRE O PROTOCOLO HTTP Aluno: Abel Luiz Cechinel Orientador: Paulo Fernando da Silva Sumário Introdução; Fundamentação Teórica; Desenvolvimento; Conclusão;
HMI: UM MIDDLEWARE PARA OBJETOS DISTRIBUÍDOS SOBRE O PROTOCOLO HTTP Aluno: Abel Luiz Cechinel Orientador: Paulo Fernando da Silva Sumário Introdução; Fundamentação Teórica; Desenvolvimento; Conclusão;
Java e Lego Mindstorms. Paulo Silveira Guilherme Silveira
 Java e Lego Mindstorms Paulo Silveira Guilherme Silveira Porque Mindstorms? 2500 US$, não programável Sem upgrade 200US$, programável Use as peças de quando você era criança! O RCX Hitachi 16Mhz 32 Kbytes
Java e Lego Mindstorms Paulo Silveira Guilherme Silveira Porque Mindstorms? 2500 US$, não programável Sem upgrade 200US$, programável Use as peças de quando você era criança! O RCX Hitachi 16Mhz 32 Kbytes
ESTUDO E DESENVOLVIMENTO DE UM ROBÔ PARA RESOLUÇÃO DO CUBO DE RUBIK RESUMO
 ESTUDO E DESENVOLVIMENTO DE UM ROBÔ PARA RESOLUÇÃO DO CUBO DE RUBIK Rodolfo F. BECKER 1 ; Luiz F. A. RODRIGUES 2 ; Heber R. MOREIRA 3 RESUMO O cubo de Rubik, também conhecido como cubo mágico, é considerado
ESTUDO E DESENVOLVIMENTO DE UM ROBÔ PARA RESOLUÇÃO DO CUBO DE RUBIK Rodolfo F. BECKER 1 ; Luiz F. A. RODRIGUES 2 ; Heber R. MOREIRA 3 RESUMO O cubo de Rubik, também conhecido como cubo mágico, é considerado
Protótipo de Linígrafo Micro-controlado
 Protótipo de Linígrafo Micro-controlado André Zimmermann andrezimmermann@operamail.com Orientador: Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação Teórica Especificação Desenvolvimento
Protótipo de Linígrafo Micro-controlado André Zimmermann andrezimmermann@operamail.com Orientador: Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação Teórica Especificação Desenvolvimento
FRAMEWORK PARA GERENCIAMENTO E DISPONIBILIZAÇÃO DE INFORMAÇÕES MULTIMÍDIA GEOLOCALIZADAS NA PLATAFORMA ANDROID
 FRAMEWORK PARA GERENCIAMENTO E DISPONIBILIZAÇÃO DE INFORMAÇÕES MULTIMÍDIA GEOLOCALIZADAS NA PLATAFORMA ANDROID Roteiro Introdução Fundamentação teórica Desenvolvimento Conclusões Introdução Plataformas
FRAMEWORK PARA GERENCIAMENTO E DISPONIBILIZAÇÃO DE INFORMAÇÕES MULTIMÍDIA GEOLOCALIZADAS NA PLATAFORMA ANDROID Roteiro Introdução Fundamentação teórica Desenvolvimento Conclusões Introdução Plataformas
V.2 Especificação Sintática de Linguagens de Programação
 V.2 Especificação Sintática de Linguagens de Programação Deve ser baseada: No planejamento da Linguagem / Compilador Objetivos, Filosofia, Potencialidades,... Nos critérios de projeto/avaliação Legibilidade,
V.2 Especificação Sintática de Linguagens de Programação Deve ser baseada: No planejamento da Linguagem / Compilador Objetivos, Filosofia, Potencialidades,... Nos critérios de projeto/avaliação Legibilidade,
PROTÓTIPO DE FERRAMENTA DE CONSULTA DE INFORMAÇÕES BASEADAS EM ONTOLOGIAS PETER ANTONY RAUSCH JOYCE MARTINS
 PROTÓTIPO DE FERRAMENTA DE CONSULTA DE INFORMAÇÕES BASEADAS EM ONTOLOGIAS PETER ANTONY RAUSCH JOYCE MARTINS ROTEIRO Introdução Objetivos Fundamentação Teórica Especificação Implementação Operacionalidade
PROTÓTIPO DE FERRAMENTA DE CONSULTA DE INFORMAÇÕES BASEADAS EM ONTOLOGIAS PETER ANTONY RAUSCH JOYCE MARTINS ROTEIRO Introdução Objetivos Fundamentação Teórica Especificação Implementação Operacionalidade
ANÁLISE COMPARATIVA DE FERRAMENTAS DE DESENVOLVIMENTO DE APLICATIVOS MÓVEIS MULTIPLATAFORMA
 ANÁLISE COMPARATIVA DE FERRAMENTAS DE DESENVOLVIMENTO DE APLICATIVOS MÓVEIS MULTIPLATAFORMA Aluno: Nikson Barth Orientador: Marcel Hugo Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos
ANÁLISE COMPARATIVA DE FERRAMENTAS DE DESENVOLVIMENTO DE APLICATIVOS MÓVEIS MULTIPLATAFORMA Aluno: Nikson Barth Orientador: Marcel Hugo Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos
Linguagens de Programação. Introdução. Carlos Bazilio
 Linguagens de Programação Introdução Carlos Bazilio carlosbazilio@id.uff.br http://www.ic.uff.br/~bazilio/cursos/lp ??? Pascal aux := 0 for i:=1 to 10 do aux := aux + i 10: i = 1 20: if i > 10 goto 60
Linguagens de Programação Introdução Carlos Bazilio carlosbazilio@id.uff.br http://www.ic.uff.br/~bazilio/cursos/lp ??? Pascal aux := 0 for i:=1 to 10 do aux := aux + i 10: i = 1 20: if i > 10 goto 60
Aplicação Web Para Gerenciamento de Mensagens de Diferentes Serviços de E- mail
 Aplicação Web Para Gerenciamento de Mensagens de Diferentes Serviços de E- mail Aluno: Anderson Rissardi Orientador: Samuel Cristhian Schwebel Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos
Aplicação Web Para Gerenciamento de Mensagens de Diferentes Serviços de E- mail Aluno: Anderson Rissardi Orientador: Samuel Cristhian Schwebel Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos
Aula 4 Encapsulamento e Relacionamento Cleverton Hentz
 Aula 4 Encapsulamento e Relacionamento Cleverton Hentz Sumário } Encapsulamento } Propriedades } Relacionamentos } Composição } Herança 2 O que é encapsulamento? } O que vocês entendem por encapsular?!
Aula 4 Encapsulamento e Relacionamento Cleverton Hentz Sumário } Encapsulamento } Propriedades } Relacionamentos } Composição } Herança 2 O que é encapsulamento? } O que vocês entendem por encapsular?!
Protótipo tipo de um Sistema Administração de Eventos
 FURB - Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Bacharel da Ciências da Computação Protótipo tipo de um Sistema Administração de Eventos Aluna: Cindy Danielski Orientador:
FURB - Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Bacharel da Ciências da Computação Protótipo tipo de um Sistema Administração de Eventos Aluna: Cindy Danielski Orientador:
3. Linguagem de Programação C
 Introdução à Computação I IBM1006 3. Linguagem de Programação C Prof. Renato Tinós Departamento de Computação e Matemática (FFCLRP/USP) 1 Principais Tópicos 3.4. Estruturas de Controle 3.4.1. Comandos
Introdução à Computação I IBM1006 3. Linguagem de Programação C Prof. Renato Tinós Departamento de Computação e Matemática (FFCLRP/USP) 1 Principais Tópicos 3.4. Estruturas de Controle 3.4.1. Comandos
ASSISTENTE DIGITAL PARA BUSCA INTELIGENTE DE INFORMAÇÕES
 ASSISTENTE DIGITAL PARA BUSCA INTELIGENTE DE INFORMAÇÕES Inspiração inicial : Ter um dispositivo que pudéssemos perguntar : Quantos consumidores estão sem luz? Quais agências de atendimento estão sobrecarregadas?
ASSISTENTE DIGITAL PARA BUSCA INTELIGENTE DE INFORMAÇÕES Inspiração inicial : Ter um dispositivo que pudéssemos perguntar : Quantos consumidores estão sem luz? Quais agências de atendimento estão sobrecarregadas?
ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS RESUMO
 ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS Luiz F. A. RODRIGUES 1 ; Rodolfo F. BECKER 2 ; Heber R. MOREIRA 3 RESUMO Atualmente, a ciência está cada vez mais extinguindo
ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS Luiz F. A. RODRIGUES 1 ; Rodolfo F. BECKER 2 ; Heber R. MOREIRA 3 RESUMO Atualmente, a ciência está cada vez mais extinguindo
PLATAFORMA SIGA RIO DAS VELHAS MANUAL DO CÓDIGO FONTE
 PLATAFORMA SIGA RIO DAS VELHAS MANUAL DO CÓDIGO FONTE ATO CONVOCATÓRIO Nº 006/2016 CONTRATO DE GESTÃO IGAM Nº 002/IGAM/2012 09/2017 1 PLATAFORMA SIGA RIO DAS VELHAS MANUAL DO CÓDIGO FONTE ATO CONVOCATÓRIO
PLATAFORMA SIGA RIO DAS VELHAS MANUAL DO CÓDIGO FONTE ATO CONVOCATÓRIO Nº 006/2016 CONTRATO DE GESTÃO IGAM Nº 002/IGAM/2012 09/2017 1 PLATAFORMA SIGA RIO DAS VELHAS MANUAL DO CÓDIGO FONTE ATO CONVOCATÓRIO
Conceitos básicos de programação
 Para aprender uma linguagem de programação podemos começar por conhecer os vocábulos ou símbolos que formam o seu léxico e depois aprender como esses vocábulos integram as instruções (frases) que compõe
Para aprender uma linguagem de programação podemos começar por conhecer os vocábulos ou símbolos que formam o seu léxico e depois aprender como esses vocábulos integram as instruções (frases) que compõe
José Carlos Ramalho Alda Reis Lopes Pedro Rangel Henriques
 de Editores Estruturados baseados em SGML José Carlos Ramalho Alda Reis Lopes Grupo de Especificação e Processamento de Linguagens Departamento de Informática Universidade do Minho Braga - Portugal Objectivos
de Editores Estruturados baseados em SGML José Carlos Ramalho Alda Reis Lopes Grupo de Especificação e Processamento de Linguagens Departamento de Informática Universidade do Minho Braga - Portugal Objectivos
Protótipo de Editor Gráfico de Fluxogramas para Representação de Comandos da Linguagem Portugol
 Protótipo de Editor Gráfico de Fluxogramas para Representação de Comandos da Linguagem Portugol Aluno Luís Carlos Seifert de Souza Orientador Wilson Pedro Carli Roteiro da Apresentação Introdução Motivação
Protótipo de Editor Gráfico de Fluxogramas para Representação de Comandos da Linguagem Portugol Aluno Luís Carlos Seifert de Souza Orientador Wilson Pedro Carli Roteiro da Apresentação Introdução Motivação