Redes de Comunicação para Aplicações Industriais. Luiz Affonso Guedes
|
|
|
- Branca Flor Candal Graça
- 7 Há anos
- Visualizações:
Transcrição
1 Redes de Comunicação para Aplicações Industriais Luiz Affonso Guedes

2 Localização do Problema da Automação

3 Information Automation and Control Discrete Device Process Device

4 Comunicação no Nível de Controle Nível de Gerência Nível de Supervisão Nível de Sensores, Atuadores e Controladores Nível de Processos Físicos Estudar as características de sistemas de comunicação no nível de sensores, atuadores e controle

5 Problemas da Tecnologia Atual da Automação Sala de Controle Central Quilômetros de cabos Milhares de conexões = pontos de falha Centenas de indicadores Difícil compreensão Alta probabilidade de erro de operação No máximo, controle automático Coleta manual de dados para relatório Dificuldade de rastreabilidade

6 Fatores de Mudança Ambiente de maior Competitividade Redução de custos Implementação Manutenção Manutenção da qualidade dos produtos Revolução da Informática Integração de circuitos em larga escala Utilização de computadores na indústria Surgimento dos microcomputadores Redes de comunicação digital

7 Fatores de Mudança Controladores Programáveis Substituição dos painéis de relés Alterações no automatismo sem alterar fiação Alta velocidade de processamento Hardware cada vez mais confiável Ampla oferta de recursos de programação Computadores de Supervisão Substituição dos painéis de controle Significativa economia de cabos Organização das informações apresentadas ao operador

8 Fatores de Mudança Computadores de Supervisão Substituição dos painéis de controle Significativa economia de cabos Computadores ligados aos CLP s Forte dependência da rede de comunicação digital Organização das informações apresentadas ao operador Amplo acréscimo de recursos ao sistema de automação

9 Situação Atual Controlador programável / Instrumentação Tendência à distribuição das E/S Economia muito significativa de fiação Principais fatores de mudança Instrumentos inteligentes Várias opções de redes p/ comunicação a nível de chão de fábrica Padronização Nenhuma rede atende a todas as aplicações Surgimento de novas tecnologias Mais recursos do que simples substituição de cabos Viabilização de novos tipos de solução

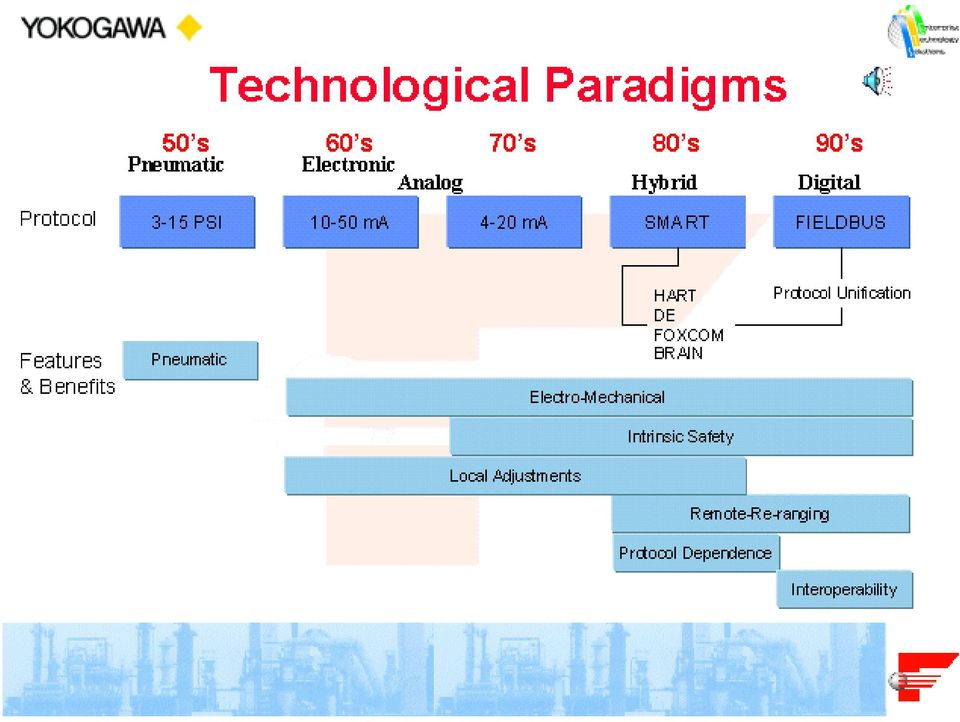
10 Evolução do conceito de sistemas de comunicação em automação industrial Tecnologia Dominante Pneumatica Analogica Digital Redes de campo Time 10

11
12 Distribuição E/S Tradicional Cada dispositivo e ligado individualmente ao CLP Alto custo de instalação Atual Distribuição de E/S ao longo da fabrica. Menor custo de instalação Tendência Sensores inteligentes Ganho funcional Baixo custo de instalação

13 Paradigma do Controle Distribuído 1980 s 1990 s 2000 O.I. PB Panel Flex I/O Multi-disciplined Controller Prox PB Panel Drive Axis Controller Flex I/O Packaged Controller Drive w/pid

14 Redes de Comunicação Interligação de Computadores Integração de computadores aos CLP s Integração dos CLP s a dispositivos inteligentes Controladores de solda Robôs Terminais de válvulas Balanças Sistemas de identificação Sensores Centros de Comando de motores

15 Caracterização de uma Rede Taxa de transmissão velocidade dos bits no fio Eficiência do protocolo bytes de dados x total de bytes na rede Forma de arbitragem do acesso ao meio Modelo da rede conceituação do fluxo de informação número de mensagens necessárias freqüência de troca das mensagens

16 Classificação de Redes Digitais de Controle Tipos de Controle Controle de Processo Devicebus Fieldbus IEC/ISA SP50 Foundation Fieldbus Profibus PA WORLDFIP Controle Lógico Sensorbus Seriplex ASI CAN Low-end bit Device Net SDS Profibus DP LONWorks INTERBUS-S Midrange byte High-end block Tipo de instrumento Instr Simples Instr Complexos 16

17 Redes Tipo Sensorbus Dados em formato de bits. Conexão - poucos equipamentos. - Equipamentos simples - Ligação direta. Características: Comunicação rápida em níveis discretos. Sensores de baixo custo. Pequenas distancias. Objetivo Principal: Minimizar custo. Exemplos: Seriplex, ASI e Interbus Loop.

18 Redes Tipo Devicebus Dados em formato de bytes Podem cobrir distâncias de até 500 m. Equipamentos Predominantemente de variáveis discretas. Algumas redes permitem a transferência de blocos de dados com prioridade menor aos dados em formato de bytes. Possuem os mesmos requisitos temporais das rede Sensorbus, porém podem manipular mais equipamentos e dados. Exmplos:Device-Net e Profibus DP.

19 Redes Tipo Fieldbus Redes mais inteligentes: Podem conectar mais equipamentos a distâncias mais longas. Os equipamentos conectados a rede possuem inteligência para executar funções específicas: Sensor, atuador, controle. As taxas de transferência de dados podem ser menores que as anteriores, porém estas são capazes de comunicar vários tipos de dados: discretos, analógicos, parâmetros, programas e informações de usuário. Exemplos: - Fieldbus Foundation e Profibus PA.

20 ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < - < ' - ^ < > v PanelView 550 Estrutura de uma Fieldbus Sensores, atuadores e fim-de-curso Interfaces de Operação Homem-Máquina Botões Inversores de Frequencia Micro Inversores Robos Software Válvulas Pneumáticas Bridges/Gateways etc.

21 Modelos de Comunicação em Redes src dst data crc Origem/Destino (ponto a ponto) identifier data crc Produtor/Consumidor (comunicação multicast)
22 ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < < ' ^ < > v PanelView 550 Produtor/Consumidor CTLR1 CTLR2 HMI #2 #1 Sensor Drive1 Drive2 Drive3 Mensagem #1 referência de posição do sensor transmitida em multicast aos CTRL1, 2 e IHM Mensagem #2 comando de velocidade do CTRL1 transmitido simultaneamente aos 3 drives e IHM
23 ALLEN-BRADLEY ALLEN-BRADLEY F1 F1 F6 F6 F2 F2 F7 F7 F3 F3 F8 F8 F4 F4 F9 F9 F5 F5 F1 0 F < - < < ' - - < ' - ^ ^ < > < > v v PanelView 550 PanelView 550 Redes Produtor/Consumidor Métodos para troca de dados Polling Cíclico Mudança de Estado a cada 100ms a cada 5ms polling analógico I/O a cada 2000ms digital I/O Mudança de estado
24 ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < - < ' - ^ < > v PanelView 550 Mestre/Escravo Um Mestre, múltiplos escravos Dispositivos escravos trocam dados apenas com o Mestre Dados de E/S (Mensagens Implícitas) são predominantes neste tipo de comunicação
25 Multimestre ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < - < ' - ^ < > v PanelView 550 Mais de um mestre Cada mestre tem seu próprio conjunto de escravos Dispositivos escravos apenas trocam dados com seus mestres Dados de E/S (Mensagens Implícitas) também predominam neste tipo de comunicação
26 Ponto a Ponto ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < - < ' - ^ < > v PanelView 550 Dispositivos enquadrados numa mesma categoria livres para tomar iniciativa de comunicação Dispositivos podem trocar dados com mais de um dispositivo ou múltiplas trocas com um mesmo dispositivo Mensagens Explícitas predominam neste tipo de comunicação
27 ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < - < ' - ^ < > v PanelView 550 étodos de troca de dados: Polling Quando os dispositivos recebem dados, imediatamente os enviam Compatível com sistemas Mestre/Escravo & Multimestre Normalmente não é utilizado com ponto a ponto Desenvolvido sobre origem/destino, mestre/escravo Inerentemente ponto a ponto, não há multicast
28 ALLEN-BRADLEY ALLEN-BRADLEY F1 F1 F6 F6 F2 F2 F7 F7 F3 F3 F8 F8 F4 F4 F9 F9 F5 F5 F1 0 F < - < < ' - - < ' - ^ < ^ > < > v v PanelView 550 PanelView 550 Métodos de troca de dados: Cíclica a cada 100ms a cada 5ms a cada 2000ms analog I/O Dispositivos produzem dados a uma taxa configurada pelo usuário Transferência cíclica é eficiente porque: os dados são transferidos numa taxa adequada ao dispositivo/aplicação recursos podem ser preservados p/ dispositivos com alta variação melhor determinismo Compatível com Mestre/Escravo, Multimestre, peer-to-peer e Multicast
29 Métodos de troca de dados: ALLEN-BRADLEY F1 F6 F2 F7 F3 F8 F4 F9 F5 F < < ' ^ < > v PanelView 550 Mudança de estado digital I/O Dispositivos produzem dados apenas quando têm seu estado alterado Sinal em segundo plano transmitido ciclicamente para confirmar que o dispositivo está ok. Mudança de estado é eficiente porque: reduz significativamente o tráfego da rede recursos não são desperdiçados processando-se dados antigos
30 Origem/Destino mestre/escravo multimestre RIO Profibus DP Interbus-S ASI DH+ Profibus FMS Modbus Plus LONWorks Produtor/Consumidor DeviceNet ControlNet Foundation Fieldbus
31 O que o mercado oferecia aos clientes? Redes eficientes, porém proprietárias. Interbus-S LONWorks DH+ Modbus Plus RIO Profibus FMS Profibus DP Profibus PA ASI que o cliente espera de uma rede hoje? mercado passa a exigir redes abertas e cilidade de integração de todos os níveis
32 Níveis de Aplicação das Redes na Indústria CAMADA DE INFORMAÇÃO CAMADA DE CONTROLE DEVICENET CAMADA DE DISPOSITIVOS
33 Faixa de Aplicação da Redes Industriais
34 Redes ASI ASI Actuator Sensor Interface Desenvolvida com um consórcio de empresas lideradas pela Siemens Rede caracterizada como sensorbus Baixo custo Fácil instalação
35 Principais Características da Rede ASI Sistema de barramento que substitui cabos paralelos de um CLP para sensores e atuadores Dados e energia são transportados no mesmo cabo Comunicação mestre-escravos Primeira versão: até 31 escravos
36 Principais Características da Rede ASI Tempo de ciclo total < 5ms Taxa de transmissão: 167 kbps (bruto) 53.3kbps (líquido) Comprimento máximo da barramento é de 100m
37 Redes ASI- Exemplos
38 Redes ASI Barramento de comunicação Tradicional Cada dispositivo e ligado individualmente ao CLP Alto custo de instalação Redes ASI Sensores e atuadores (escravos) estão ligados ao CLP (mestre) via um barramento
39 Possíveis Estruturas da Rede AS I
40 Redes ASI - Protocolo Cada escravo tem um endereço único. A mensagem sempre parte do mestre. Todos os escravos são chamados seqüencialmente pelo mestre. As mensagens têm 4 bits de dados.
41 Redes ASI Comunicação Mestre- Escravos
42 Redes ASI- Estrutura do Escravo
43 Redes ASI - Endereçamento A rede suporta até 31 escravo Cada escravo deverá ter um número único entre 1 e bits de endereçamento Numeração automática O endereço 0 é de broadcast. Cada escravo pode ter: Até 4 entradas digitais e 4 saídas digitais Entradas = 4*31=124 Saídas = 4*31 = 124 São utilizados 04 bits de parâmetros por escravo
44 Rede ASI Ciclo de Transmissão 1- Pedido do Mestre 2- Pausa do Mestre 3- Resposta do Escravo 4- Pauso do Escravo
45 Rede ASI Estrutura das Mensagens
46
47 Redes ASI Exemplo de Uso
48 Redes CAN O barramento CAN (Controller Area Network) foi desenvolvido pela empresa Alemã BOSCH e disponibilizado em meados dos anos 80. É considerada como uma rede devicebus Desenvolvido inicialmente para área automotiva. Devido à sua comprovada confiabilidade e robustez também está sendo adotado em outras aplicações industriais de tempo real.
49 Áreas de Aplicação do CAN Veículos (marítmo, aéreo, terrestre) carros de passeio, off-road, trens, sistema de semáforo (trens e carros), eletrônica marítma, máquinas agrícolas, helicópteros, transporte público. Sistema de Controle Industrial controle de planta industriais de pequeno e médio porte, de maquinário, robôs, sistema de supervisão. Automação Predial controle de elevadores, ar condicionado, iluminação. Aplicações Específicas sistemas médicos, telescópios, simuladores de vôo, satélites artificiais, entre outros.
50 Características do CAN Protocolo Digital e Comunicação Serial Síncrono Conceitos baseados na técnica CSMA/CR (Carrier Sense Multiple Access /Collision Resolution) Priorização de Mensagens Grande Flexibilidade de Configuração Recepção Multicast Garantia de Consistência dos Dados Detecção/Sinalização de erros Retransmissão Automática de Mensagens Corrompidas
51 Camadas do CAN O CAN foi dividido em duas camadas, obedecendo o modelo OSI/ISO: Data Link Layer Logical Link Control (LLC) Medium Access Control (MAC) Physical Layer
52 Camadas do Protocolo CAN Modelo OSI/ISO Camada Física - Physical Layer Codificação / Decodificação dos Bits Temporização dos Bits Sincronização
53 Camadas do Protocolo CAN Camada Física Physical Layer Velocidade de Transmissão Até 1Mbps Taxa Kbit/s Distância máxima (m) Taxa de transmissão X distância para o barramento CAN
54 Camadas do Protocolo CAN Camada Física Physical Layer ISO11898 Alta Velocidade de transmissão de dados 125 Kbps a 1 Mpbs ISO Baixa Velocidade de Transmissão de dados 10 Kbps a 125 Kbps
55 Camadas do Protocolo CAN Camada Física Physical Layer Meio de Transmissão Fios Elétricos Formas de Constituição de um barramento CAN: 1 Fio - Fio de dados 2 Fios - CAN_H,CAN_L 4 Fios CAN_H CAN_L Vcc GND
56 Camadas do Protocolo CAN Modelo OSI/ISO Camada de Enlace - Data Link Layer Logical Link Control (LLC) Recepção Filtragem Notificação de Overload Gerenciamento de Recuperação Medium Accsses Control (MAC) Encapsulamento/ Desencapsulamento dos dados Codificação dos Quadros Gerenciamento de Acesso ao meio Detecção e sinalização de erros Reconhecimento Serialização / Deserialização
57 Quadros CAN O barramento CAN utiliza 4 tipos de quadros (frames) para controlar a transferência de mensagens Quadro de Dados (Data Frame) Quadro Remoto (Remote Frame) Quadro de Erro (Error Frame) Quadro de Sobrecarga (Overload Frame)
58 Mensagens do CAN Formato das Mensagens Tipos de Quadros Camada de Enlace Quadro de Dados Composto por 7 (sete) diferentes campos de bits
59 Mensagens do CAN Formato das Mensagens Tipos de Quadros Camada de Enlace Quadro Padrão CAN 2.0A Identificador de 11 bits É possível ter até 2048 mensagens em uma rede Quadro Estendido CAN 2.0B Identificador de 29 bits É possível ter até 537 milhões de mensagens em uma rede
60 Mensagens do CAN Formato das Mensagens - Campo de Arbitragem
61 Mensagens do CAN Formato das Mensagens - Campo de Controle dominante
62 Codificação de Tamanho para o Campo de Dados CAN
63 Mensagens do CAN Formato das Mensagens Campo de Dados Pode comportar de 0 (zero) a 8 (oito) bytes, de 8 bits cada.
64 Mensagens do CAN Formato das Mensagens Campo CRC (Cyclic Redundancy Check) Composto por 15 (quinze) bits CRC delimitador Recessivo
65 Mensagens do CAN Formato das Mensagens Campo de Reconhecimento (Ack Field) Composto por 2 (dois) bits ACK Slot ACK delimiter Fim de Quadro (End of Frame) Composto por sete bits recessivos
66 Mensagens do CAN Formato das Mensagens Tipos de Quadros Quadro Remoto Remote Frame É enviado toda vez que um determinado nó, atuando como receptor, necessita receber uma mensagem. Mesma formação do Quadro de Dados, entretanto não possui o Campo de Dados. O Bit RTR nesse quadro é recessivo R T R Recessivo
67 Mensagens do CAN Formato das Mensagens Tipos de Quadros Quadro de Erros (Error Frame) Composto por dois campos: Flag de erro Error Active Error Passive Delimitador de quadro Quadro de Sobrecarga (Overload Frame) Composto por dois campos: Flag de Sobrecarga Delimitador de quadro 8 bits recessivos 6 bits dominantes 8 bits recessivos
68 Mensagens do CAN Formato das Mensagens Tipos de Quadros Espaço Interquadros Interframe Space Intervalo 3 bits recessivos
69 Codificação CAN Campos Codificados Bit Stuffing Quadro de Dados / Remoto Início de Quadro Campo de Arbitragem Campo de Controle Campo de Dados CRC Campos Não Codificados (Formato Fixo) Quadro de Dados / Remoto Delimitador de CRC Campo de Reconhecimento Fim de Quadro Quadros de Erros Quadro de Overload
70 Tratamento de Erros Detecção e Sinalização Detecção Nível de Bit Bit monitoring Bit Stuffing Nível de Mensagem CRC ou Cyclic Redundancy Check Frame Check Acknowledgment Error Check Sinalização Erro de CRC - O bit flag de erro é enviado após o bit Ack Delimiter Outros tipos de erros - O bit flag de erro é enviado após a detecção
71 Tratamento de Erros Mecanismo de Falhas - Fault Confinent Dois contadores - Nó do CAN Erros de Transmissão 8 pontos Erros de Recepção 1 ponto Estado dos Nós 1 a 127 pontos Error Active 128 a 255 Error Passive Acima de 255 Bus Off
72 Filtragem e Validação das Mensagens Filtragem Através de Máscaras e Códigos Ex:Para um Quadro Padrão de 11 bits Validação das Mensagens Transmissor Após Último bit do Fim de Quadro Receptor Após Penúltimo bit do Fim de Quadro
73 Protocolos de Alto Nível High Layer Protocols Modelo OSI Algumas Tarefas Desenvolvidas Inicialização dos diversos componentes do sistema Distribuição dos identificadores de mensagem Interpretação do conteúdo do Quadro de Dados Gerenciamento do status do sistema Exemplo de Protocolos de Alto Nível HLP CAN OPEN DEVICENET CAN Kingdom
74 Exemplo de Aplicação com Rede CAN
75 Aspectos Positivos do CAN Flexibilidade do Sistema; Roteamento de Mensagens; Multicast e Multi-mestre; Consistência dos Dados; Bastante utilizado em aplicações embarcadas.
76 Protocolo ModBus Desenvolvido pela Modicon Industrial Automation System (atual Schneider) Protocolo de comunicação serial orientado a caracter Não é um a rede Comunicação Mestre/Escravos Pode ser utilizado na camada de controle ou na camada de supervisão
77 Protocolo ModBus - Localização Camada Enlace (Modbus) Protocolo Modbus Protocolo Modbus Pilha TCP/IP Camada Física (RS-232, RS-485) Interface de Rede (Ethernet) Interface de Rede (Ethernet)
78 Protocolo ModBus Modo de Comunicação: Mestre/Escravos
79 Protocolo ModBus Modo de Comunicação: Exemplo Supervisório Configurador Rede de Supervisão Protocolo Modbus CLP 1 CLP 2
80 Protocolo ModBus Modo de Comunicação: Exemplo
81 Protocolo ModBus Modo de Transmissão
82 Protocolo ModBus Modo de Transmissão Modo ASCII 1 bit de início 7 bits de dado Sem paridade 2 bits de parada 16 para correção de erro - LRC Modo RTU 1 bit de início 8 bits de dado 1 bit de paridade 1 bit de parada 16 para correção de erro - CRC
83 Protocolo ModBus Endereços
84 Protocolo ModBus Exemplo de Funções
85 Protocolo Hart Highway Addressable Remote Transducer Desenvolvido em 1980 pela Fisher Rosemount Proposta: Utilizar os cabos tradicionais de 4-20mA Modular o sinal de dados sobre o sinal analógico Comunicação bidirecional
86 Protocolo Hart O sinal é modulado em FSK Bit 1 tom de 1mA pico a pico em 1200Hz Bit 0 tom de 1mA pico a pico em 2400Hz
87 Protocolo Hart Pode utilizar vários modos de comunicação, mas o mais utilizado é o mestre/escravos Ciclo em torno de 500ms
88 Protocolo Hart Exemplo de Uso
Classificação das redes para automação industrial. Luiz Affonso Guedes
 Classificação das redes para automação industrial Luiz Affonso Guedes CONCEITO FIELDBUS Tecnologia Dominante Pneumatica Analogica Digital Redes de campo 1940 1960 1980 2000 Time 2 Redes de Comunicação
Classificação das redes para automação industrial Luiz Affonso Guedes CONCEITO FIELDBUS Tecnologia Dominante Pneumatica Analogica Digital Redes de campo 1940 1960 1980 2000 Time 2 Redes de Comunicação
Protocolo CAN Controller Area Network
 Universidade Federal do Rio Grande do Norte Programa de Pós-graduação em Engenharia Elétrica Protocolo CAN Controller Area Network Carlo Frederico Campos Danielle Simone Prof. Luiz Affonso Maio / 2005
Universidade Federal do Rio Grande do Norte Programa de Pós-graduação em Engenharia Elétrica Protocolo CAN Controller Area Network Carlo Frederico Campos Danielle Simone Prof. Luiz Affonso Maio / 2005
Sistemas Embarcados/ Redes Industriais/ Comunicação Serial
 1 Sistemas Embarcados/ Redes Industriais/ Comunicação Serial César Yutaka Ofuchi ofuchi@utfpr.edu.br 2 Pirâmide da Automação ERP (Entreprise Resource Planning) MES (Manufacturing Execution Systems) 3 Pirâmide
1 Sistemas Embarcados/ Redes Industriais/ Comunicação Serial César Yutaka Ofuchi ofuchi@utfpr.edu.br 2 Pirâmide da Automação ERP (Entreprise Resource Planning) MES (Manufacturing Execution Systems) 3 Pirâmide
Instituto Federal de São Paulo Campus Presidente Epitácio Redes e Protocolos Industriais Prof Fernando Barros Rodrigues Protocolos Industriais
 Protocolos Industriais Redes de campo surgiram da necessidade de interligar equipamentos usados nos sistemas de automação, que se proliferavam operando independentemente. A interligação desses equipamentos
Protocolos Industriais Redes de campo surgiram da necessidade de interligar equipamentos usados nos sistemas de automação, que se proliferavam operando independentemente. A interligação desses equipamentos
Modbus, Profibus, Devicenet. Prof. Regis Isael
 Modbus, Profibus, Devicenet Prof. Regis Isael Redes Modbus Redes Modbus A princípio era um protocolo proprietário criado pela MODICON em 1978 visando o uso em seus próprios dispositivos. Atualmente a MODICON
Modbus, Profibus, Devicenet Prof. Regis Isael Redes Modbus Redes Modbus A princípio era um protocolo proprietário criado pela MODICON em 1978 visando o uso em seus próprios dispositivos. Atualmente a MODICON
Foundation Fieldbus. Curso: Téc. Automação Professor: Regis Isael
 Foundation Fieldbus Curso: Téc. Automação Professor: Regis Isael Foundation Fieldbus O Foundation Fieldbus é um sistema da comunicação totalmente digital, em série e bidirecional que conecta equipamentos
Foundation Fieldbus Curso: Téc. Automação Professor: Regis Isael Foundation Fieldbus O Foundation Fieldbus é um sistema da comunicação totalmente digital, em série e bidirecional que conecta equipamentos
Redes de Comunicação para Aplicações Industriais
 Localização do Problema da Automação Redes de Comunicação para Aplicações Industriais Luiz Affonso Guedes affonso@dca.ufrn.br Comunicação no Nível de Controle Discrete Device Information Automation and
Localização do Problema da Automação Redes de Comunicação para Aplicações Industriais Luiz Affonso Guedes affonso@dca.ufrn.br Comunicação no Nível de Controle Discrete Device Information Automation and
R4 12. AS-Interface. Capítulo. Autor: Constantino Seixas Filho UFMG Departamento de Engenharia Eletrônica
 Capítulo R4 12 AS-Interface 1 ASI Introdução: A rede AS-Interface - Actuator-Sensor-Interface foi inicialmente desenvolvida por um pool de empresas alemãs e suíças capitaneadas pela Siemens para ser uma
Capítulo R4 12 AS-Interface 1 ASI Introdução: A rede AS-Interface - Actuator-Sensor-Interface foi inicialmente desenvolvida por um pool de empresas alemãs e suíças capitaneadas pela Siemens para ser uma
Controller Area Network CAN bus. Introdução
 Controller Area Network CAN bus Introdução Desenvolvido pela Bosch para automóveis Padronizado pela ISO 11898 Camada física Camada de enlace Comunicação serial até 1Mbps e até 1km. Sinalização diferencial
Controller Area Network CAN bus Introdução Desenvolvido pela Bosch para automóveis Padronizado pela ISO 11898 Camada física Camada de enlace Comunicação serial até 1Mbps e até 1km. Sinalização diferencial
Introdução ao CAN Vitor Amadeu Souza Cerne Tecnologia
 1. Introdução Introdução ao CAN Vitor Amadeu Souza Cerne Tecnologia www.cerne-tec.com.br vitor@cerne-tec.com.br O barramento CAN foi desenvolvido pela BOSCH para ser uma interface multimestre. Este barramento
1. Introdução Introdução ao CAN Vitor Amadeu Souza Cerne Tecnologia www.cerne-tec.com.br vitor@cerne-tec.com.br O barramento CAN foi desenvolvido pela BOSCH para ser uma interface multimestre. Este barramento
Redes Industriais. Carlos Roberto da Silva Filho, M. Eng.
 Redes Industriais Carlos Roberto da Silva Filho, M. Eng. Criado na década de 1970 pela Modicon. É um dos mais antigos protocolos utilizados em redes de CLPs para aquisição de sinais de instrumentos e comandar
Redes Industriais Carlos Roberto da Silva Filho, M. Eng. Criado na década de 1970 pela Modicon. É um dos mais antigos protocolos utilizados em redes de CLPs para aquisição de sinais de instrumentos e comandar
Redes de Processo e Comunicação Digital
 PTC3421 Instrumentação Industrial Redes de Processo e Comunicação Digital V2017A PROF. R. P. MARQUES Comunicação Analógica Possivelmente ainda o meio de transmissão mais utilizado, transmissão por corrente
PTC3421 Instrumentação Industrial Redes de Processo e Comunicação Digital V2017A PROF. R. P. MARQUES Comunicação Analógica Possivelmente ainda o meio de transmissão mais utilizado, transmissão por corrente
Instituto Federal de São Paulo Campus Presidente Epitácio Redes e Protocolos Industriais Prof Fernando Barros Rodrigues Protocolos Industriais
 Protocolos Industriais Redes de campo surgiram da necessidade de interligar equipamentos usados nos sistemas de automação, que se proliferavam operando independentemente. A interligação desses equipamentos
Protocolos Industriais Redes de campo surgiram da necessidade de interligar equipamentos usados nos sistemas de automação, que se proliferavam operando independentemente. A interligação desses equipamentos
Guia de estudos 01. Aluno: Data: Curso: Engenharia Elétrica. 2. Quais são os tópicos que compõem um sistema de comunicação? Explique cada um.
 Guia de estudos 01 Aluno: Data: Curso: Engenharia Elétrica Periodo: Guia de estudos 01 Aluno: Data: Curso: Periodo: 1. O que é uma rede Industrial? Sistema de Comunicação bidirecional em tempo real que
Guia de estudos 01 Aluno: Data: Curso: Engenharia Elétrica Periodo: Guia de estudos 01 Aluno: Data: Curso: Periodo: 1. O que é uma rede Industrial? Sistema de Comunicação bidirecional em tempo real que
Comparação entre Redes Industriais: Fieldbus Foundation H1 e Allen-Bradley DH+
 Comparação entre Redes Industriais: Fieldbus Foundation H1 e Allen-Bradley DH+ Salvador Fernandes de Jesus Júnior * Sérgio José Gonçalves e Silva ** salvadorjr@petrobras.com.br sergiojose@petrobras.com.br
Comparação entre Redes Industriais: Fieldbus Foundation H1 e Allen-Bradley DH+ Salvador Fernandes de Jesus Júnior * Sérgio José Gonçalves e Silva ** salvadorjr@petrobras.com.br sergiojose@petrobras.com.br
Transmissores e Receptores
 www.iesa.com.br 1 Os transmissores são instrumentos que convertem um sinal qualquer, de um sensor ou transdutor, em um sinal padrão para ser enviado a distância. Outras funções de tratamento e condicionamento
www.iesa.com.br 1 Os transmissores são instrumentos que convertem um sinal qualquer, de um sensor ou transdutor, em um sinal padrão para ser enviado a distância. Outras funções de tratamento e condicionamento
Atividade de Participação de Aula 02 (Individual) Aluno: Data: 17/08/2017
 Aluno: Data: 17/08/2017") Atividade de Participação de Aula 02 (Individual) Aluno: Data: 17/08/2017 Curso: Engenharia Elétrica Período: 1. O que é uma rede Industrial? Sistema de Comunicação bidirecional em tempo real que permite
Atividade de Participação de Aula 02 (Individual) Aluno: Data: 17/08/2017 Curso: Engenharia Elétrica Período: 1. O que é uma rede Industrial? Sistema de Comunicação bidirecional em tempo real que permite
Protocolos de Comunicação em Ambientes Industriais
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Protocolos de Comunicação em Ambientes Industriais Sistemas de Transmissão de Dados, 2015.1 Heitor Medeiros
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Protocolos de Comunicação em Ambientes Industriais Sistemas de Transmissão de Dados, 2015.1 Heitor Medeiros
Prof. Associado Mário Luiz Tronco
 Redes Industriais (Redes de Barramento ou I/O Bus Network) Prof. Associado Mário Luiz Tronco Função Básica: comunicação entre dispositivos de campo (devices) que estão conectados a um barramento, além
Redes Industriais (Redes de Barramento ou I/O Bus Network) Prof. Associado Mário Luiz Tronco Função Básica: comunicação entre dispositivos de campo (devices) que estão conectados a um barramento, além
INTRUMENTAÇÃO ELETROELETRÔNICA
 INTRUMENTAÇÃO ELETROELETRÔNICA PROF. PIERRE VILAR DANTAS AULA 10 30/10/2017 TURMA: 0063- A HORÁRIO: 2N PIERREDANTASBLOG.WORDPRESS.COM 1/66 Objetivos da Aula Conhecer os principais protocolos de comunicação
INTRUMENTAÇÃO ELETROELETRÔNICA PROF. PIERRE VILAR DANTAS AULA 10 30/10/2017 TURMA: 0063- A HORÁRIO: 2N PIERREDANTASBLOG.WORDPRESS.COM 1/66 Objetivos da Aula Conhecer os principais protocolos de comunicação
Protocolos de Comunicação em Ambientes Industriais
 Protocolos de Comunicação em Ambientes Industriais Aula 03 - Protocolos Industriais Heitor Medeiros Florencio 1 heitorm@dca.ufrn.br 1 Universidade Federal do Rio Grande do Norte Centro de Tecnologia Departamento
Protocolos de Comunicação em Ambientes Industriais Aula 03 - Protocolos Industriais Heitor Medeiros Florencio 1 heitorm@dca.ufrn.br 1 Universidade Federal do Rio Grande do Norte Centro de Tecnologia Departamento
Barramentos de campo. Modelo OSI para sistemas comunicantes
 Barramentos de campo Bibliografia H. Kopetz, Design Principles for Distributed Embedded Applications, Kluwer Academic Publishers, 1997. 1 Modelo OSI para sistemas comunicantes OSI Open Systems Interconnect
Barramentos de campo Bibliografia H. Kopetz, Design Principles for Distributed Embedded Applications, Kluwer Academic Publishers, 1997. 1 Modelo OSI para sistemas comunicantes OSI Open Systems Interconnect
Automação. 4 de fevereiro de Prof. Ramon Moreira Lemos
 Automação 4 de fevereiro de 2016 O que é automação? Engenharia de automação é o estudo das técnicas que visam otimizar um processo de negócio, aumentando sua produtividade, promovendo a valorização da
Automação 4 de fevereiro de 2016 O que é automação? Engenharia de automação é o estudo das técnicas que visam otimizar um processo de negócio, aumentando sua produtividade, promovendo a valorização da
Seminário de Redes - Profibus
 UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL REI Campus Alto Paraopeba Engenharia Mecatrônica Seminário de Redes - Profibus Samuel Aladim Amorim - 154400063 Anne Caroline Gonçalves Coelho - 124450039 Thiago Lucas
UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL REI Campus Alto Paraopeba Engenharia Mecatrônica Seminário de Redes - Profibus Samuel Aladim Amorim - 154400063 Anne Caroline Gonçalves Coelho - 124450039 Thiago Lucas
Redes para Automação Industrial. Luiz Affonso Guedes 2006
 Redes para Automação Industrial Luiz Affonso Guedes affonso@dca.ufrn.br 2006 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
Redes para Automação Industrial Luiz Affonso Guedes affonso@dca.ufrn.br 2006 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
Aberto. Domínio público. Estabelecido por órgãos oficiais de normatização, padronização.
 Redes industriais Definição Estrutura de comunicação digital que permite a troca de informações entre diferentes componentes/equipamentos computadorizados, dedicada ao contexto e ambiente industrial. Padrões
Redes industriais Definição Estrutura de comunicação digital que permite a troca de informações entre diferentes componentes/equipamentos computadorizados, dedicada ao contexto e ambiente industrial. Padrões
Comparativo entre Redes de Automação Industrial e suas Características
 Comparativo entre Redes de Automação Industrial e suas Características Julio Arlindo Pinto Azevedo & Alex Bernardes de Souza Abstract This document contains a description of the main industrial networks
Comparativo entre Redes de Automação Industrial e suas Características Julio Arlindo Pinto Azevedo & Alex Bernardes de Souza Abstract This document contains a description of the main industrial networks
Profinet, Devicenet. Prof. Regis Isael
 Profinet, Devicenet Prof. Regis Isael PROFInet O PROFInet é uma rede padronizada pelo PROFIBUS International de acordo com a IEC 61158-5 e a IEC 61158-6. É uma das quatorze redes de Ethernet industrial.
Profinet, Devicenet Prof. Regis Isael PROFInet O PROFInet é uma rede padronizada pelo PROFIBUS International de acordo com a IEC 61158-5 e a IEC 61158-6. É uma das quatorze redes de Ethernet industrial.
COMPARATIVO ENTRE OS PROTOCOLOS DEVICENET E FOUNDATION FIELDBUS
 COMPARATIVO ENTRE OS PROTOCOLOS DEVICENET E FOUNDATION FIELDBUS Marcos Vinícius de Miranda Weldson Queiroz de Lima Leonardo Silveira DCA - UFRN CEP 59072-970 Natal, RN {miranda, well, leonardo}@dca.ufrn.br
COMPARATIVO ENTRE OS PROTOCOLOS DEVICENET E FOUNDATION FIELDBUS Marcos Vinícius de Miranda Weldson Queiroz de Lima Leonardo Silveira DCA - UFRN CEP 59072-970 Natal, RN {miranda, well, leonardo}@dca.ufrn.br
Redes CAN (Controller Area Network)
") 1 de 5 Redes CAN (Controller Area Network) Myagyh A. P. Miranda, Vitória R. L. Lacerda myagyh_map@hotmail.com, vitoria.regina.lacerda@hotmail.com Escola de Engenharia da Pontifícia Universidade Católica
1 de 5 Redes CAN (Controller Area Network) Myagyh A. P. Miranda, Vitória R. L. Lacerda myagyh_map@hotmail.com, vitoria.regina.lacerda@hotmail.com Escola de Engenharia da Pontifícia Universidade Católica
Prof. Manuel A Rendón M
 Prof. Manuel A Rendón M AGUIRRE, L. A. Enciclopédia da Automática, Volume II, Cap. 15.2.2, 16.7.1, 16.7.2 Moraes Engenharia de Automação Industrial 2ª. Edição LTC Cap.: 6.3.3, 6.3.2 Controller Area Network
Prof. Manuel A Rendón M AGUIRRE, L. A. Enciclopédia da Automática, Volume II, Cap. 15.2.2, 16.7.1, 16.7.2 Moraes Engenharia de Automação Industrial 2ª. Edição LTC Cap.: 6.3.3, 6.3.2 Controller Area Network
I/O REMOTO. LINHA FnIO-S ARQUITETURA TÍPICA DESTAQUES
 I/O REMOTO I/O REMOTO LINHA FnIO-S A linha FnIO-S de I/Os remotos é ideal para a aquisição de dados de máquinas e processos, permitindo a comunicação com sistemas de supervisão e controle através de diversos
I/O REMOTO I/O REMOTO LINHA FnIO-S A linha FnIO-S de I/Os remotos é ideal para a aquisição de dados de máquinas e processos, permitindo a comunicação com sistemas de supervisão e controle através de diversos
PROFIBUS DP & PA. Fundamentos da Tecnologia
 PROFIBUS DP & PA Fundamentos da Tecnologia Cenário de Protocolos 2 Tipo de controle Controle de Processo Controle Lógico Sensorbus Seriplex ASI INTERBUSLoop Devicebus Device Net SDS Profibus DP LONWorks
PROFIBUS DP & PA Fundamentos da Tecnologia Cenário de Protocolos 2 Tipo de controle Controle de Processo Controle Lógico Sensorbus Seriplex ASI INTERBUSLoop Devicebus Device Net SDS Profibus DP LONWorks
Delimitação de Quadros. Exemplos de Protocolos de Nível de Enlace. Nível de Enlace. Nível de de Enlace. Disciplina: Comunicação de Dados IV
 Departamento de Engenharia de Telecomunicações - UFF Disciplina: Nível de de Enlace Profa. Débora Christina Muchaluat Saade deborams@telecom.uff.br br Aplicação Apresentação Sessão Transporte Rede Enlace
Departamento de Engenharia de Telecomunicações - UFF Disciplina: Nível de de Enlace Profa. Débora Christina Muchaluat Saade deborams@telecom.uff.br br Aplicação Apresentação Sessão Transporte Rede Enlace
Nível de Enlace. Nível de Enlace. Serviços. Serviços oferecidos os nível de rede
 Nível de Enlace Enlace: caminho lógico entre estações. Permite comunicação eficiente e confiável entre dois computadores. Funções: fornecer uma interface de serviço à camada de rede; determinar como os
Nível de Enlace Enlace: caminho lógico entre estações. Permite comunicação eficiente e confiável entre dois computadores. Funções: fornecer uma interface de serviço à camada de rede; determinar como os
Manual da Comunicação DeviceNet
 Manual da Comunicação DeviceNet Relé Inteligente Série: SRW 01 Idioma: Português Documento: 10000013013 / 01 05/2008 Sobre o manual Sumário SOBRE O MANUAL... 5 ABREVIAÇÕES E DEFINIÇÕES... 5 REPRESENTAÇÃO
Manual da Comunicação DeviceNet Relé Inteligente Série: SRW 01 Idioma: Português Documento: 10000013013 / 01 05/2008 Sobre o manual Sumário SOBRE O MANUAL... 5 ABREVIAÇÕES E DEFINIÇÕES... 5 REPRESENTAÇÃO
ENGENHARIA ELÉTRICA Redes Industriais e supervisórios. Método de Acesso da Rede
 Método de Acesso da Rede Mais do que comunicação digital Sistema 4 a 20 ma Sistema PROFIBUS PA Todos os dados do instrumento disponíveis no nível de controle. 15,3 ma Tag = LIC- 012 Valor = 70,34 Unidade=
Método de Acesso da Rede Mais do que comunicação digital Sistema 4 a 20 ma Sistema PROFIBUS PA Todos os dados do instrumento disponíveis no nível de controle. 15,3 ma Tag = LIC- 012 Valor = 70,34 Unidade=
AULA 13 - REDES INDUSTRIAIS
 AULA 13 - REDES INDUSTRIAIS Necessidade da indústria pela integração de equipamentos e disposi6vos em todos os níveis de automação; Necessidade de tecnologias de comunicação de dados especificamente desenvolvidas
AULA 13 - REDES INDUSTRIAIS Necessidade da indústria pela integração de equipamentos e disposi6vos em todos os níveis de automação; Necessidade de tecnologias de comunicação de dados especificamente desenvolvidas
Nível de Enlace. Nível de Enlace. Serviços. Serviços. Serviços. Serviços. Serviços oferecidos os nível de rede
 Nível de Enlace Enlace: caminho lógico entre estações. Permite comunicação eficiente e confiável entre dois computadores. Funções: fornecer uma interface de serviço à camada de rede; determinar como os
Nível de Enlace Enlace: caminho lógico entre estações. Permite comunicação eficiente e confiável entre dois computadores. Funções: fornecer uma interface de serviço à camada de rede; determinar como os
Exercícios de Revisão Redes de Computadores Edgard Jamhour. VLANs, Switching e Padrões IEEE 802
 Exercícios de Revisão Redes de Computadores Edgard Jamhour VLANs, Switching e Padrões IEEE 802 Cenário 1: Considere a seguinte configuração de rede estruturada em VLANs 220.0.0.2/24 C VLAN 2 B VLAN 1 A
Exercícios de Revisão Redes de Computadores Edgard Jamhour VLANs, Switching e Padrões IEEE 802 Cenário 1: Considere a seguinte configuração de rede estruturada em VLANs 220.0.0.2/24 C VLAN 2 B VLAN 1 A
Universidade Federal de São João del-rei MODBUS
 Universidade Federal de São João del-rei Campus Alto Paraopeba MODBUS Aluno (s): Breno Augusto Miranda Valente Isabelle Mayumi Koga Pedro Morais Campos Pinto Rodrigo Ferreira Souza Wallyson Weslley Lima
Universidade Federal de São João del-rei Campus Alto Paraopeba MODBUS Aluno (s): Breno Augusto Miranda Valente Isabelle Mayumi Koga Pedro Morais Campos Pinto Rodrigo Ferreira Souza Wallyson Weslley Lima
ENGG55 REDES INDUSTRIAIS Introdução aos Sistemas de Comunicação Industrial
 ENGG55 REDES INDUSTRIAIS Introdução aos Sistemas de Comunicação Industrial Prof. Eduardo Simas (eduardo.simas@ufba.br) DEE Departamento de Engenharia Elétrica Escola Politécnica - UFBA 1 Introdução Muitas
ENGG55 REDES INDUSTRIAIS Introdução aos Sistemas de Comunicação Industrial Prof. Eduardo Simas (eduardo.simas@ufba.br) DEE Departamento de Engenharia Elétrica Escola Politécnica - UFBA 1 Introdução Muitas
PROcess. cess FIeld BUS PROCESS FIELD BUS PROCESS FIELD BUS
 PROcess cess FIeld BUS Arquitetura do Sistema Rede Planta Supervisão Comando Planejamento Banco de dados Rede Controle Controle em tempo real Segurança Interface Rede Campo Aquisição das variáveis Atuação
PROcess cess FIeld BUS Arquitetura do Sistema Rede Planta Supervisão Comando Planejamento Banco de dados Rede Controle Controle em tempo real Segurança Interface Rede Campo Aquisição das variáveis Atuação
Prof. Carlos Messani
 Prof. Carlos Messani A Camada de Enlace Serviços: Encapsulamento HDLC HDLC - o tipo de encapsulamento padrão em conexões point-to-point, links dedicados e conexões com comutação por circuito quando o link
Prof. Carlos Messani A Camada de Enlace Serviços: Encapsulamento HDLC HDLC - o tipo de encapsulamento padrão em conexões point-to-point, links dedicados e conexões com comutação por circuito quando o link
Comparação entre as Redes Industriais: Profibus e Interbus
 Comparação entre as Redes Industriais: Profibus e Interbus Josinai de Morais Barbosa - josinai@engcomp.ufrn.br Frederico Augusto Fernandes Silveira - silveira@engcomp.ufrn.br Departamento de Engenharia
Comparação entre as Redes Industriais: Profibus e Interbus Josinai de Morais Barbosa - josinai@engcomp.ufrn.br Frederico Augusto Fernandes Silveira - silveira@engcomp.ufrn.br Departamento de Engenharia
Redes de Computadores II. Módulo 1 Introdução e a camada de enlace
 Redes de Computadores II Módulo 1 Introdução e a camada de enlace 1 Comunicação de Dados e Redes de Computadores O problema fundamental da comunicação é reproduzir em um ponto exatamente ou aproximadamente
Redes de Computadores II Módulo 1 Introdução e a camada de enlace 1 Comunicação de Dados e Redes de Computadores O problema fundamental da comunicação é reproduzir em um ponto exatamente ou aproximadamente
N1040. Controlador de Temperatura
 Controlador de Temperatura N1040 O controlador de temperatura N1040 reúne baixo custo e alta precisão com ação PID. Tem profundidade de somente 80 mm, sistema de conexão elétrica removível, duas saídas
Controlador de Temperatura N1040 O controlador de temperatura N1040 reúne baixo custo e alta precisão com ação PID. Tem profundidade de somente 80 mm, sistema de conexão elétrica removível, duas saídas
O protocolo CAN como solução para aplicações distribuídas, baseadas em objetos, entre PCs e microcontroladores
 UNIVERSIDADE FEDERAL DE PELOTAS INSTITUTO DE FÍSICA E MATEMÁTICA DEPARTAMENTO DE MATEMÁTICA, ESTATÍSTICA E COMPUTAÇÃO CURSO DE BACHARELADO EM INFORMÁTICA O protocolo CAN como solução para aplicações distribuídas,
UNIVERSIDADE FEDERAL DE PELOTAS INSTITUTO DE FÍSICA E MATEMÁTICA DEPARTAMENTO DE MATEMÁTICA, ESTATÍSTICA E COMPUTAÇÃO CURSO DE BACHARELADO EM INFORMÁTICA O protocolo CAN como solução para aplicações distribuídas,
Sistemas Automotivos Embarcados
 1 - Introdução (enfoque) 2-3 - LIN 4 - MOST 5 - FlexRay Enfoque Comunicação entre dispositivos conectados ao automóvel; Grande variedade de dispositivos; Pouca informação disponível sobre a área; Em geral
1 - Introdução (enfoque) 2-3 - LIN 4 - MOST 5 - FlexRay Enfoque Comunicação entre dispositivos conectados ao automóvel; Grande variedade de dispositivos; Pouca informação disponível sobre a área; Em geral
SEL5759 Redes de Comunicação Industrial
 1 Elementos Básicos em Sistemas de Automação Conceito de Redes de Campo Histórico de Redes de Campo e seus Requisitos 2 Mais de 30 anos de desenvolvimento; Muitas normas e padrões: distintas necessidades
1 Elementos Básicos em Sistemas de Automação Conceito de Redes de Campo Histórico de Redes de Campo e seus Requisitos 2 Mais de 30 anos de desenvolvimento; Muitas normas e padrões: distintas necessidades
1. INTRODUÇÃO AS REDES INDUSTRIAIS
 1. INTRODUÇÃO AS REDES INDUSTRIAIS 1. Como poderíamos explicar a divisão das redes de comunicação industriais em níveis? 2. Qual a importância da padronização de um protocolo de rede de comunicação? 3.
1. INTRODUÇÃO AS REDES INDUSTRIAIS 1. Como poderíamos explicar a divisão das redes de comunicação industriais em níveis? 2. Qual a importância da padronização de um protocolo de rede de comunicação? 3.
CPs Altus PROFIBUS-DP
 CPs Altus PROFIBUS-DP Programa do Workshop 1 - Redes de Campo 2 - PROFIBUS 3 - PROFIBUS-DP 4 - PROFIBUS-DP Redundante 5 - CPs Altus PROFIBUS - DP 6 - Série AL-2000 PROFIBUS-DP 7 - Série Quark PROFIBUS-DP
CPs Altus PROFIBUS-DP Programa do Workshop 1 - Redes de Campo 2 - PROFIBUS 3 - PROFIBUS-DP 4 - PROFIBUS-DP Redundante 5 - CPs Altus PROFIBUS - DP 6 - Série AL-2000 PROFIBUS-DP 7 - Série Quark PROFIBUS-DP
Transmissores e Receptores
 www.iesa.com.br 1 Os transmissores são instrumentos que convertem um sinal qualquer, de um sensor ou elemento primário, em um sinal padrão para ser enviado a distância. Outras funções de tratamento dos
www.iesa.com.br 1 Os transmissores são instrumentos que convertem um sinal qualquer, de um sensor ou elemento primário, em um sinal padrão para ser enviado a distância. Outras funções de tratamento dos
Relé Inteligente SRW 01 V4.0X
 Motores I Automação I Energia I Transmissão & Distribuição I Tintas Relé Inteligente SRW 01 V4.0X Manual da Comunicação DeviceNet TM Manual da Comunicação DeviceNet TM Série: SRW 01 Versão do Firmware:
Motores I Automação I Energia I Transmissão & Distribuição I Tintas Relé Inteligente SRW 01 V4.0X Manual da Comunicação DeviceNet TM Manual da Comunicação DeviceNet TM Série: SRW 01 Versão do Firmware:
Instituto Federal de São Paulo Campus Presidente Epitácio Redes e Protocolos Industriais Prof Fernando Barros Rodrigues.
 HART/4-20mA Atualmente muitas aplicações estão rodando em HART (Highway Addressable Remote Transducer), tendo vantagens com os equipamentos inteligentes e utilizandose da comunicação digital de forma flexível
HART/4-20mA Atualmente muitas aplicações estão rodando em HART (Highway Addressable Remote Transducer), tendo vantagens com os equipamentos inteligentes e utilizandose da comunicação digital de forma flexível
Redes de Computadores
 Nível de Enlace Inst tituto de Info ormátic ca - UF FRGS Redes de Computadores Camada de enlace de dados Introdução Aula 06 Aplicação Apresentação Sessão Transporte Rede Enlace Físico Protocolo nível de
Nível de Enlace Inst tituto de Info ormátic ca - UF FRGS Redes de Computadores Camada de enlace de dados Introdução Aula 06 Aplicação Apresentação Sessão Transporte Rede Enlace Físico Protocolo nível de
Capítulo6-7 Redes de Computadores Camada 2 Conceitos
 Há três formas de se calcular o frame check sum: cyclic redundancy check (CRC) - executa cálculos polinomiais sobre os dados paridade bidimensional - adiciona um 8 th oitavo bit que faz uma seqüência de
Há três formas de se calcular o frame check sum: cyclic redundancy check (CRC) - executa cálculos polinomiais sobre os dados paridade bidimensional - adiciona um 8 th oitavo bit que faz uma seqüência de
Faculdade de Engenharia da Computação
 Faculdade de Engenharia da Computação Disciplina Redes de Computadores - II Protocolo de Comunicação de Dados (Parte-I) Prof. Wagner dos Santos C. de Jesus www1.univap.br/wagner/ec.html 1 Conceito de transmissão
Faculdade de Engenharia da Computação Disciplina Redes de Computadores - II Protocolo de Comunicação de Dados (Parte-I) Prof. Wagner dos Santos C. de Jesus www1.univap.br/wagner/ec.html 1 Conceito de transmissão
Redes de comunicação industrial
 Redes de comunicação industrial Redes de comunicação Durante a última década, as redes de comunicação são as que tiveram uma maior evolução na área do controlo industrial, à semelhança de outros ramos
Redes de comunicação industrial Redes de comunicação Durante a última década, as redes de comunicação são as que tiveram uma maior evolução na área do controlo industrial, à semelhança de outros ramos
HART 7 : DETALHANDO O PROTOCOLO
 HART 7 : DETALHANDO O PROTOCOLO INTRODUÇÃO HART (Highway Addressablee Remote Transducer) é um protocolo de comunicação bidirecional, introduzido em 1990. Utilizado em plantas industriais, no qual controla
HART 7 : DETALHANDO O PROTOCOLO INTRODUÇÃO HART (Highway Addressablee Remote Transducer) é um protocolo de comunicação bidirecional, introduzido em 1990. Utilizado em plantas industriais, no qual controla
Classificações. Alberto Felipe Friderichs Barros
 Classificações Alberto Felipe Friderichs Barros Década de 1950 Surgimento dos primeiros computadores comerciais; Maneira com que estes computadores eram utilizados obrigava que os usuários submetessem
Classificações Alberto Felipe Friderichs Barros Década de 1950 Surgimento dos primeiros computadores comerciais; Maneira com que estes computadores eram utilizados obrigava que os usuários submetessem
Instituto Politécnico de Beja Escola Superior De Tecnologia e Gestão Departamento de engenharia. Tecnologias WAN
 Instituto Politécnico de Beja Escola Superior De Tecnologia e Gestão Departamento de engenharia Tecnologias WAN [Escrever o subtítulo do documento] Aluno: 2009 Capitulo 3 Hight-Level Data Link Control
Instituto Politécnico de Beja Escola Superior De Tecnologia e Gestão Departamento de engenharia Tecnologias WAN [Escrever o subtítulo do documento] Aluno: 2009 Capitulo 3 Hight-Level Data Link Control
Motores I Automação I Energia I Transmissão & Distribuição I Tintas. DeviceNet CFW500. Manual do Usuário
 Motores I Automação I Energia I Transmissão & Distribuição I Tintas DeviceNet CFW500 Manual do Usuário Manual do Usuário DeviceNet Série: CFW500 Idioma: Português N º do Documento: 10001316311 / 00 Data
Motores I Automação I Energia I Transmissão & Distribuição I Tintas DeviceNet CFW500 Manual do Usuário Manual do Usuário DeviceNet Série: CFW500 Idioma: Português N º do Documento: 10001316311 / 00 Data
APRESENTAÇÃO. Caro (a) Aluno (a), Seja Bem Vindo!
 Aluno (a), Seja Bem Vindo!") APRESENTAÇÃO Caro (a) Aluno (a), Seja Bem Vindo! A SMC Pneumáticos do Brasil, em parceria com a DK8 Tecnologia Educacional, marca o ano de 2010, com o inicio do Curso de Automação / Módulo III Redes Industriais,
APRESENTAÇÃO Caro (a) Aluno (a), Seja Bem Vindo! A SMC Pneumáticos do Brasil, em parceria com a DK8 Tecnologia Educacional, marca o ano de 2010, com o inicio do Curso de Automação / Módulo III Redes Industriais,
1. INTRODUÇÃO AS REDES INDUSTRIAIS
 1. INTRODUÇÃO AS REDES INDUSTRIAIS 1. Como poderíamos explicar a divisão das redes de comunicação industriais em níveis? 2. Qual a importância da padronização de um protocolo de rede de comunicação? 3.
1. INTRODUÇÃO AS REDES INDUSTRIAIS 1. Como poderíamos explicar a divisão das redes de comunicação industriais em níveis? 2. Qual a importância da padronização de um protocolo de rede de comunicação? 3.
Nível de Enlace. Laboratório MídiaCom - UFF Profa. Débora Christina Muchaluat Saade
 Departamento de Ciência da Computação - UFF Nível de Enlace Profa. Débora Christina Muchaluat Saade Laboratório MídiaCom - UFF debora@midiacom.uff.br http://www.midiacom.uff.br/debora 1 Nível de Enlace
Departamento de Ciência da Computação - UFF Nível de Enlace Profa. Débora Christina Muchaluat Saade Laboratório MídiaCom - UFF debora@midiacom.uff.br http://www.midiacom.uff.br/debora 1 Nível de Enlace
Redes de Computadores. Redes de Computadores. Redes de Computadores. ü Contador de caracteres. ü Stuffing de caracteres.
 Departamento de Ciência da Computação - UFF Nível de Enlace Profa. Débora Christina Muchaluat Saade Laboratório MídiaCom - UFF debora@midiacom.uff.br Nível de Enlace Funcionalidades principais: Oferecer
Departamento de Ciência da Computação - UFF Nível de Enlace Profa. Débora Christina Muchaluat Saade Laboratório MídiaCom - UFF debora@midiacom.uff.br Nível de Enlace Funcionalidades principais: Oferecer
Redes Industriais HART
 Introduzido em 1989, tinha a intenção inicial de permitir fácil calibração, ajustes de range e damping de equipamentos analógicos. Foi o primeiro protocolo digital de comunicação bidirecional que não afetava
Introduzido em 1989, tinha a intenção inicial de permitir fácil calibração, ajustes de range e damping de equipamentos analógicos. Foi o primeiro protocolo digital de comunicação bidirecional que não afetava
Evolução de Protocolos de Comunicação
 Evolução de Protocolos de Comunicação Sérgio Yoshio Fujii sergio.fujii@areva-td.com Ethan Boardman ethan.boardman@areva-td.com Agenda do Mini-Curso Evolução de protocolos de comunicação: Protocolos proprietários
Evolução de Protocolos de Comunicação Sérgio Yoshio Fujii sergio.fujii@areva-td.com Ethan Boardman ethan.boardman@areva-td.com Agenda do Mini-Curso Evolução de protocolos de comunicação: Protocolos proprietários
Modelo ISO/OSI e pilha TCP/IP. Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT
 Modelo ISO/OSI e pilha TCP/IP Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS1RAI1 Redes para Automação Industrial JOINVILLE 06/03/2017 Introdução contextualização Pirâmide da Automação; Modelo
Modelo ISO/OSI e pilha TCP/IP Douglas Wildgrube Bertol DEE - Engenharia Elétrica CCT AS1RAI1 Redes para Automação Industrial JOINVILLE 06/03/2017 Introdução contextualização Pirâmide da Automação; Modelo
6. Protocolos Digitais de Comunicação de Chão de Fábrica HART e Modbus
 6. Protocolos Digitais de Comunicação de Chão de Fábrica HART e Modbus Diante de sistemas de automação compostos por múltiplos controladores de processos, CLPs, transmissores de campo e elementos finais
6. Protocolos Digitais de Comunicação de Chão de Fábrica HART e Modbus Diante de sistemas de automação compostos por múltiplos controladores de processos, CLPs, transmissores de campo e elementos finais
Redes Industriais. Prof. Marcos Forte 2014
 Redes Industriais Prof. Marcos Forte 2014 Introdução Nas empresas modernas temos uma grande quantidade de computadores operando em diferentes setores. A interconexão desses computadores torna a operação
Redes Industriais Prof. Marcos Forte 2014 Introdução Nas empresas modernas temos uma grande quantidade de computadores operando em diferentes setores. A interconexão desses computadores torna a operação
REDES CAN: Uma abordagem no uso veicular
 REDES CAN: Uma abordagem no uso veicular Romer Rios Campos de Souza 1, Luís Augusto Mattos Mendes 1. 1 Departamento de Ciência da Computação Universidade Presidente Antônio Carlos (UNIPAC) Campus Magnus
REDES CAN: Uma abordagem no uso veicular Romer Rios Campos de Souza 1, Luís Augusto Mattos Mendes 1. 1 Departamento de Ciência da Computação Universidade Presidente Antônio Carlos (UNIPAC) Campus Magnus
TA Tecnologia de Automação Para Farmacêuticos 24.outubro.2017
 TA Tecnologia de Automação Para Farmacêuticos 24.outubro.2017 PLCs Programmable Logic Controllers PLC Programmable Logic Controller Hardware ao qual os sensores de campo são conectados, assim como outros
TA Tecnologia de Automação Para Farmacêuticos 24.outubro.2017 PLCs Programmable Logic Controllers PLC Programmable Logic Controller Hardware ao qual os sensores de campo são conectados, assim como outros
802.11. Diversos fatores podem impactar na comunicação, tanto cabeado como sem fio, porém os riscos são maiores na sem fio.
 Redes Sem Fio O camada envolvida na troca de uma rede cabeada (wired) por uma rede sem fio (wireless) é a camada de enlace. As camadas superiores, (IP e TCP ) não se alteram no caso de LAN ou WLAN. Diversos
Redes Sem Fio O camada envolvida na troca de uma rede cabeada (wired) por uma rede sem fio (wireless) é a camada de enlace. As camadas superiores, (IP e TCP ) não se alteram no caso de LAN ou WLAN. Diversos
ELT030 Instrumentação 1
 ELT030 Instrumentação Universidade Federal de Itajubá Engenharia Eletrônica Sensores Inteligentes ELT030 Instrumentação 1 Transmissor eletrônico Um transdutor converte uma grandeza física qualquer para
ELT030 Instrumentação Universidade Federal de Itajubá Engenharia Eletrônica Sensores Inteligentes ELT030 Instrumentação 1 Transmissor eletrônico Um transdutor converte uma grandeza física qualquer para
GERENCIAMENTO DE PROJETOS - 20h - EaD
 GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
Manual da Comunicação DeviceNet
 Manual da Comunicação DeviceNet Inversor de Freqüência Série: CFW-11 Idioma: Português Documento: 10000099180 / 00 04/2008 Sumário SOBRE O MANUAL... 5 ABREVIAÇÕES E DEFINIÇÕES... 5 REPRESENTAÇÃO NUMÉRICA...
Manual da Comunicação DeviceNet Inversor de Freqüência Série: CFW-11 Idioma: Português Documento: 10000099180 / 00 04/2008 Sumário SOBRE O MANUAL... 5 ABREVIAÇÕES E DEFINIÇÕES... 5 REPRESENTAÇÃO NUMÉRICA...
Redes para Automação Industrial. Luiz Affonso Guedes DCA-CT-UFRN
 Redes para Automação Industrial Luiz Affonso Guedes DCA-CT-UFRN 2003.1 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
Redes para Automação Industrial Luiz Affonso Guedes DCA-CT-UFRN 2003.1 Objetivos da Disciplina Estudo sistêmico de sistemas de automação industrial. Contextualizar a importância de redes de comunicação
Redes Fieldbus: Visão Geral
 Redes Fieldbus: Visão Geral LOCAL AREA NETWORK I/O 4-20 ma CAMPO DPT101 PT101 FCV101 DPT102 PT102 FCV102 2 SISTEMA SUPERVISÓRIO L A N GATEWAY CAMPO DPT101 PT101 FCV101 DPT102 PT102 FCV102 3 CONCEITO FIELDBUS
Redes Fieldbus: Visão Geral LOCAL AREA NETWORK I/O 4-20 ma CAMPO DPT101 PT101 FCV101 DPT102 PT102 FCV102 2 SISTEMA SUPERVISÓRIO L A N GATEWAY CAMPO DPT101 PT101 FCV101 DPT102 PT102 FCV102 3 CONCEITO FIELDBUS
Motores I Automação I Energia I Transmissão & Distribuição I Tintas. DeviceNet TM SRW 01. Manual do Usuário
 Motores I Automação I Energia I Transmissão & Distribuição I Tintas DeviceNet TM SRW 01 Manual do Usuário Manual do Usuário DeviceNet TM Série: SRW 01 Versão do Firmware: V6.0X Idioma: Português Nº do
Motores I Automação I Energia I Transmissão & Distribuição I Tintas DeviceNet TM SRW 01 Manual do Usuário Manual do Usuário DeviceNet TM Série: SRW 01 Versão do Firmware: V6.0X Idioma: Português Nº do
Experiência 04: Comandos para testes e identificação do computador na rede.
 ( ) Prova ( ) Prova Semestral ( ) Exercícios ( ) Prova Modular ( ) Segunda Chamada ( ) Exame Final ( ) Prática de Laboratório ( ) Aproveitamento Extraordinário de Estudos Nota: Disciplina: Turma: Aluno
( ) Prova ( ) Prova Semestral ( ) Exercícios ( ) Prova Modular ( ) Segunda Chamada ( ) Exame Final ( ) Prática de Laboratório ( ) Aproveitamento Extraordinário de Estudos Nota: Disciplina: Turma: Aluno
Introdução. Modelo de um Sistema de Comunicação
 I 1 Comunicação de Dados e Redes de Computadores Introdução FEUP/DEEC/CDRC I 2002/03 MPR/JAR Modelo de um Sistema de Comunicação» Fonte gera a informação (dados) a transmitir» Emissor converte os dados
I 1 Comunicação de Dados e Redes de Computadores Introdução FEUP/DEEC/CDRC I 2002/03 MPR/JAR Modelo de um Sistema de Comunicação» Fonte gera a informação (dados) a transmitir» Emissor converte os dados
Em 1987: 21 Cia e Inst. Pesquisas iniciam o Desenvolvimento - Alemanha Em 1996: EN50170 Em 2002: IEC Em 2003: IEC
 PROcess FIeldBUS 1 Profibus Vagner S. Vasconcelos vsvasconcelos@gmail.com @vsvasconcelos Em 1987: 21 Cia e Inst. Pesquisas iniciam o Desenvolvimento - Alemanha Em 1996: EN50170 Em 2002: IEC 61158 Em 2003:
PROcess FIeldBUS 1 Profibus Vagner S. Vasconcelos vsvasconcelos@gmail.com @vsvasconcelos Em 1987: 21 Cia e Inst. Pesquisas iniciam o Desenvolvimento - Alemanha Em 1996: EN50170 Em 2002: IEC 61158 Em 2003:
ET53C - SISTEMAS DIGITAIS
 ET53C - SISTEMAS DIGITAIS Barramentos de Comunicação Serial UART e I 2 C Prof.: Glauber Brante e Profa. Mariana Furucho gbrante@utfpr.edu.br marianafurucho@utfpr.edu.br UTFPR Universidade Tecnológica Federal
ET53C - SISTEMAS DIGITAIS Barramentos de Comunicação Serial UART e I 2 C Prof.: Glauber Brante e Profa. Mariana Furucho gbrante@utfpr.edu.br marianafurucho@utfpr.edu.br UTFPR Universidade Tecnológica Federal
Introdução às Redes Industriais Parte 01
 Referências Introdução às Redes Industriais Parte 01 Barramentos Industriais Referência principal 2 Seções Seções 1. Introdução 2. Redes Industriais A. Redes comerciais x industriais 1) Implementação 2)
Referências Introdução às Redes Industriais Parte 01 Barramentos Industriais Referência principal 2 Seções Seções 1. Introdução 2. Redes Industriais A. Redes comerciais x industriais 1) Implementação 2)
Introdução às redes de comunicação
 Introdução às redes de comunicação Necessidade das redes de comunicação Controle de estoque Controle de produção Controle supervisório Controle de processo Controle de almoxarifado 02/03/2017 14:37 Redes
Introdução às redes de comunicação Necessidade das redes de comunicação Controle de estoque Controle de produção Controle supervisório Controle de processo Controle de almoxarifado 02/03/2017 14:37 Redes
Manual do dispositivo escravo Modbus
 Manual do dispositivo escravo Modbus Sumário Sumário... 1 Lista de figuras... 1 Lista de tabelas... 1 Introdução... 2 O meio físico EIA-485... 2 Topologia da rede... 4 Layout da placa... 5 Comunicação
Manual do dispositivo escravo Modbus Sumário Sumário... 1 Lista de figuras... 1 Lista de tabelas... 1 Introdução... 2 O meio físico EIA-485... 2 Topologia da rede... 4 Layout da placa... 5 Comunicação
Rede DeviceNet. Fábio Soares de Lima. fabio@dca.ufrn.br
 Rede DeviceNet Fábio Soares de Lima fabio@dca.ufrn.br Índice Introdução e Histórico Modelo de camadas Meio Físico Topologia Números de Estações Ativas Número de Redes por CLP Protocolo DATA Frame Camada
Rede DeviceNet Fábio Soares de Lima fabio@dca.ufrn.br Índice Introdução e Histórico Modelo de camadas Meio Físico Topologia Números de Estações Ativas Número de Redes por CLP Protocolo DATA Frame Camada
Motores I Automação I Energia I Transmissão & Distribuição I Tintas. CANespecial1 CFW700. Manual do Usuário
 Motores I Automação I Energia I Transmissão & Distribuição I Tintas CANespecial1 CFW700 Manual do Usuário Manual do Usuário CANespecial1 Série: CFW700 Idioma: Português N º do Documento: 10003106164 /
Motores I Automação I Energia I Transmissão & Distribuição I Tintas CANespecial1 CFW700 Manual do Usuário Manual do Usuário CANespecial1 Série: CFW700 Idioma: Português N º do Documento: 10003106164 /
Telecomunicações. Prof. André Yoshimi Kusumoto
 Telecomunicações Prof. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Frame Relay É um protocolo de chaveamento por pacotes para redes de longa distância (WAN), que provê conectividade entre redes
Telecomunicações Prof. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Frame Relay É um protocolo de chaveamento por pacotes para redes de longa distância (WAN), que provê conectividade entre redes
Visão Geral do Protocolo CANBus
 Visão Geral do Protocolo CANBus História CAN Controller Area Network. Desenvolvido, pela BOSCH, na década de 80 para a interligação dos sistemas de controle eletrônicos nos automóveis. 1. CAN, que foi
Visão Geral do Protocolo CANBus História CAN Controller Area Network. Desenvolvido, pela BOSCH, na década de 80 para a interligação dos sistemas de controle eletrônicos nos automóveis. 1. CAN, que foi
Uma Comparação entre as Tecnologias CAN e Interbus
 Uma Comparação entre as Tecnologias CAN e Interbus João Paulo de Araújo Bezerra José Sávio Alves de Souza Segundo Paulo Roberto da Motta Pires Departamento de Engenharia de Computação e Automação Universidade
Uma Comparação entre as Tecnologias CAN e Interbus João Paulo de Araújo Bezerra José Sávio Alves de Souza Segundo Paulo Roberto da Motta Pires Departamento de Engenharia de Computação e Automação Universidade
Modelo OSI x Modelo TCP/IP
 Modelo OSI x Modelo TCP/IP OSI TCP/IP 7 Aplicação 6 Apresentação 5 Aplicação 5 Sessão 4 3 2 1 Transporte 4 Transporte Rede 3 Internet Enlace 2 Link de dados Física 1 Física Modelo de Referência OSI/ISO
Modelo OSI x Modelo TCP/IP OSI TCP/IP 7 Aplicação 6 Apresentação 5 Aplicação 5 Sessão 4 3 2 1 Transporte 4 Transporte Rede 3 Internet Enlace 2 Link de dados Física 1 Física Modelo de Referência OSI/ISO
FATEC ADIB MOISÉS DIB
 FATEC ADIB MOISÉS DIB EEI102 Redes Industriais Redes Industriais Aula 05 Rede AS-i Professor Pedro Adolfo Galani sites.google.com/site/fatecsbcnoturno/ ... na aula passada vimos o acesso ao meio de diferentes
FATEC ADIB MOISÉS DIB EEI102 Redes Industriais Redes Industriais Aula 05 Rede AS-i Professor Pedro Adolfo Galani sites.google.com/site/fatecsbcnoturno/ ... na aula passada vimos o acesso ao meio de diferentes
Redes Industriais: DeviceNet
 Universidade Federal de São João del Rei Campus Alto Paraopeba Redes Industriais: DeviceNet João Pedro D'angelis da Costa Julia Cristiane Silva Silveira Lucas Henrique Araújo Corrêa Luiz Fernando Ferreira
Universidade Federal de São João del Rei Campus Alto Paraopeba Redes Industriais: DeviceNet João Pedro D'angelis da Costa Julia Cristiane Silva Silveira Lucas Henrique Araújo Corrêa Luiz Fernando Ferreira
5. Sistemas Supervisórios e Protocolos de Comunicação Industriais
 UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENG. DE PRODUÇÃO E SISTEMAS - DEPS INFORMÁTICA INDUSTRIAL IFD 5. Sistemas Supervisórios e Protocolos de
UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENG. DE PRODUÇÃO E SISTEMAS - DEPS INFORMÁTICA INDUSTRIAL IFD 5. Sistemas Supervisórios e Protocolos de