INTRODUÇÃO À ROBÓTICA MÓVEL
|
|
|
- Domingos Moisés Alcântara de Santarém
- 8 Há anos
- Visualizações:
Transcrição
1 INTRODUÇÃO À ROBÓTICA MÓVEL Aula 8 Edson Prestes Departamento de Informática Teórica prestes@inf.ufrgs.br

2 São dispositivos que medem algum atributo do ambiente. São chamados de transdutor (transducer), pois eles transformam um sinal de entrada (som, luz, pressão, etc) em um sinal analógico ou digital capaz de ser usado pelo robô. Através deles um robô pode reagir aos eventos inesperados assim como extrair informações úteis sobre o ambiente. Exemplos : encoder, sonar, laser, etc.

3 Sensores podem ser classificados em Passivo : contam apenas com a informação disponível pelo ambiente. Exemplo: uma câmera requer uma certa quantidade de luz para produzir uma imagem útil. Ativo : emite energia no ambiente a fim de obter informações sobre ele. Exemplo: um sonar envia um sinal, recebe um eco e mede o tempo de emissão/recepção do sinal. Uma câmera com flash é um sensor ativo. Sensoriamento ativo é diferente de sensor ativo.

4 A fusão sensorial é um processo que combina dados oriundos de vários sensores em um simples elemento de percepção (percept). A combinação dos sensores pode ser Redundante (ou competitiva): quando os sensores fornecem as mesmas informações sobre um objeto de interesse. Complementar: quando os sensores fornecem informações diferentes sobre um mesmo objeto de interesse. Em um resgate, um robô pode combinar um sensor térmico com uma câmera. Coordenada: os sensores são usados sequencialmente, em geral, para focar um objeto de interesse. Quando um predador vê o movimento de presa, ele pára a fim de realizar uma análise mais apurada da cena.

5 A fusão sensorial pode ser incorporada em comportamentos através da : fissão sensorial - gera ações a partir do disparo de vários comportamentos, onde cada comportamento recebe suas próprias leituras sensoriais fusão sensorial orientada à ação - uma ou mais leituras sensorias podem influenciar o comportamento resultante, por exemplo, reforçando-o. Sensor fashion: um robô pode intercambiar entre as modalidades sensoriais de acordo com a situação corrente.

6 Fissão Sensorial Fusão Sensorial orientada à ação Sensor Fashion

7 De acordo com [1], existem três tipos de sensores: Proprioceptivo : fornece informação interna relativa ao sistema robótico : velocidade das rodas, nível da bateria, etc. Exteroceptivo : adquire informações sobre a área de atuação do robô, por exemplo, medidas de distância, luminosidade do ambiente, etc. Exproprioceptivo : fornece informação sobre o corpo do robô ou partes dele relativa ao ambiente, por exemplo, posição no ambiente.

8 Atributos de um sensor Campo de visão (FOV): especifica a largura da região do espaço coberta pelo sensor. Em geral, ele é expresso em graus. Alcance: distância máxima que o sensor consegue fornecer uma medida confiável. Acurácia refere-se a quão correto é a leitura fornecida pelo sensor. É expresso como uma proporção do valor real. Acurácia= 1 - Erro /v, onde Erro=m-v, com m= valor medido e v o valor real.

9 Atributos de um sensor Repetibilidade : está associada a quantidade de vezes que um sensor fornece a mesma medida em uma dada condição. Sensores de alta acurácia tem alta repetibilidade. Resolução : é a menor diferença entre dois valores que podem ser detectados pelo sensor. Reposta no ambiente: está associada ao desempenho do sensor no ambiente. Câmeras não são adequadas para ambientes escuros.

10 Atributos de um sensor Consumo de energia. Sensores ativos consomem mais energia que os passivos. Confiabilidade do hardware. Sensores sonar produzem resultados incorretos quando a carga da bateria fica abaixo de 12V. Tamanho. Dependendo do tamanho do sensor, ele pode se tornar inadequado para a plataforma robótica. Complexidade computacional.

11 Dead Reckoning Segundo Murphy[1], dead reckoning é propriocepção, onde o robô mede um sinal que origina dentro de si próprio. Segundo Borenstein [2], dead reckoning é um procedimento matemático para determinar a posição corrente de um robô usando informações sobre sua localização prévia e velocidade em um intervalo de tempo. Exemplo: odometria, a qual é calculada a partir de odômetros instalados no robô.
![Segundo Borenstein [2], dead reckoning é um procedimento matemático para determinar a posição](/docs-images/46/10154358/images/page_11.jpg "corrente de um robô usando informações sobre sua localização prévia e velocidade em um intervalo de")
12 Encoder Ótico Desenvolvido em meados de 1940 por Baldwin Piano Company. É um exemplo de sensor proprioceptivo. Em robôs móveis, ele é acoplado ao eixo das rodas do robô para medir a quantidade de vezes que a roda girou. Isto permite estimar o deslocamento feito pelo robô. Em braços manipuladores, ele pode fornecer a posição das juntas.

13 Encoder Ótico Incorporam uma versão de sensor de proximidade chamado break-beam proximity sensor. Um feixe de luz é periodicamente interrompido por um padrão opaco atachado em um disco intermediário rotatório.

14 Classificação de Encoder Óticos Incremental : mede a velocidade rotacional e infere a posição relativa do robô; Absoluto: modela diretamente a posição angular e infere a velocidade. Encoders incrementais em geral são mais baratos que os absolutos, porém a informação contida neles é volátil.

15 Encoder Incremental A versão mais simples possui um único canal. Este encoder produz um certo número de pulsos na forma de uma onda quadrada para cada revolução do eixo das rodas do robô. Quanto maior a quantidade de pulsos (resolução) maior o custo. De acordo com Borenstein[2], eles são convenientes em sistemas de controle alta e média velocidades, porém são instáveis em velocidades muito baixas devido a erros de quantização. Encoder com um único canal é incapaz de detectar a direção da rotação.

16 Encoder Incremental A versão com dois canais permite detectar a direção da rotação. O segundo canal gera uma onda de pulsos deslocada da onda gerada pelo primeiro canal I indice de saída, alto uma vez para cada revolução Canais A e B

17 Encoder Incremental Canal A Canal B Sentido Horário Canal A Canal B Passo 1 High Low Passo 2 High High Passo 3 Low High Passo 4 Low Low Sentido Anti-horário Canal A Canal B Passo 1 High Low Passo 2 Low Low Passo 3 Low High Passo 4 High High

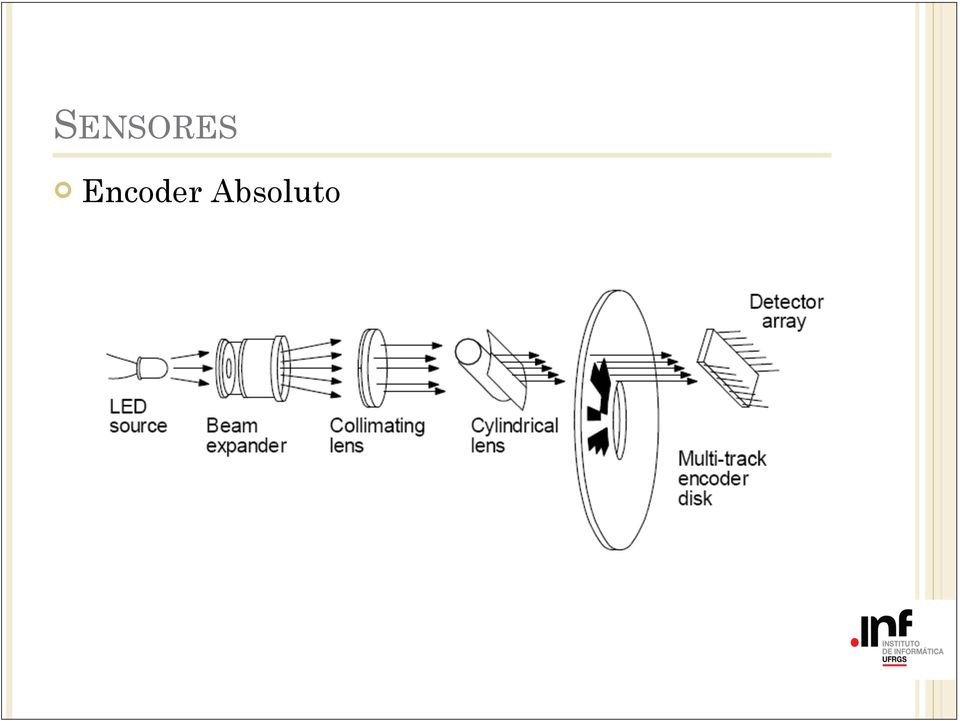
18 Encoder Absoluto Mantém a informação posicional mesmo após uma interrupção de energia. Possui múltiplos discos concentricos que são usados para formar diferentes padrões. Um array de elementos fotodetectores são individualmente alinhados com o padrão formado pela rotação dos discos do encoder. Isto gera uma saída paralela que especifica de forma unívoca a posição angular da junta.

19 Encoder Absoluto
20 Encoder Absoluto O sistema de codificação usado pela saída pode ser o código Gray, codificação binária, etc. A codificação binária envolve multiplas mudanças de bits para incrementar ou decrementar um contador de 1 unidade. A codificação gray envolve apena a mudança de 1 bit para incrementar ou decrementar um contador de 1 unidade. Decimal Código Binário Código Gray

21 Encoder Absoluto São usados em aplicações que envolvem rotações de baixa velocidade diferentes dos encoder incremental Devido a saída ser paralela, requem uma interface mais complexa para a decodificação do padrão formado pelos discos.
22 Sensores de Direção Ajudam a amenizar alguns problemas encontrados na odometria. Em sistemas baseados em odometria, qualquer erro mínimo de orientação causará um erro posicional ilimitado. Através de sensores de direção, é possível identificar erros de orientação e corrigir os erros de odometria. Exemplos de sensores de direção: Giroscópio; Bússolas.
23 Sensor Geomagnético Determina a orientação absoluta de um veículo móvel. Usa o campo magnético da Terra. São passíveis de erros na presença de linhas de força e estruturas metálicas. Exemplo: Bússolas Bússolas são exemplos de sensores exproprioeptivo.
24 GPS Desenvolvido pelo Departamento de Defesa Norte-Americano É um exemplo de sensor exproprioceptivo. A localização absoluta de um receptor é determinada pela triangularização do tempo de recepção de sinais enviados pelos satélites. Existem 32 satélites em órbita ao redor da Terra a uma altura de aproximadamente milhas naúticas (1 milha 1.85km) Os gps comuns possuem erros de localização de 15m. Porém existem gps comerciais com erro de localização em torno de cm.
25 Sensores Time-of-flight (TOF) São usados para medir distâncias através do tempo que um sinal leva para ir até um objeto e ser refletido de volta ao emissor; A emissão e a recepção do sinal podem ocorrer a partir de um mesmo dispositivo. Em alguns casos, o transmissor pode ser diferente do receptor. São exemplos de sensores ativos e exteroceptivos.
26 Sensores Time-of-flight (TOF) O sinal pode ser um pulso de energia acústico ou ótico. Por isso convém usar nos cálculos de distância a velocidade do som (0.3 m/ms) ou da luz (0.3m/ns). A distância percorrida é dada por d = vt e representa 2 vezes a distância entre o emissor e o objeto. Exemplo : Laser e Sonar.
27 Sensores TOF Ultrasônico São usados em sistemas robóticos indoor. Amplamente disponíveis; de baixo custo e fácil de usar. Aplicabilidade: Modelagem de ambientes; Estimação de posição; Tratamento de colisões Detecção de movimentos Em geral, os sistemas robóticos assumem que o FOV é 30 graus e alcance de 5m. Figura extraída de [1]
28 Sensores TOF Ultrasônico O transdutor corresponde a uma fina membrana metálica. Um pulso elétrico forte gera uma onda fazendo a membrana produzir um som. Em seguida membrana pára de vibrar esperando o retorno do sinal emitido. O sinal retornado faz a membrana vibrar. Ele é amplificado e se a intensidade do sinal estiver acima de um dado limiar então a distância associada ao sinal é calculada.
29 Sensores TOF Ultrasônico Área observada pelo sensor de ultrasom. Figura extraída de [1] I região associada à leitura. Objeto pode estar em qualquer posição nesta área. II região vazia. III região coberta pelo sensor, mas desconhecida. IV região fora do campo de visão do sensor.
30 Sensores TOF Ultrasônico - Fontes de erros [2]: Variações na velocidade de propagação devido à temperatura do ambiente ou umidade. Incertezas na determinação exata do tempo de chegada no pulso refletido, devido à diminuição de energia do pulso emitido. Falta de precisão no circuito de temporização usado para medir o tempo de ida e volta do pulso. Sistemas acústicos usam tecnologia de detecção mais barata que sistemas óticos.
31 Sensores TOF Ultrasônico - Fontes de erros [2]: Ângulo de incidência do pulso na superfície do alvo. O sinal refletido representa apenas uma pequena porção do sinal original (specular reflexion). A energia restante se dispersa em outras direções; é absorvida pela superfície do alvo; ou é absorvida por outro sensor (crosstalk). Devido ao ângulo de incidência da superfície, um dos lados do cone de visão do sensor irá atingir primeiro a superfície do que o outro. Isto irá provocar um sinal de retorno que corresponderá a uma distância inferior a real (foreshortening).
32 Sensores TOF Ultrasônico - Fontes de erros: foreshortening specular reflexion Figuras extraídas de [1]
33 Sensores TOF Ultrasônico - Fontes de erros: Figura Extraída de [2]
34 Sensores TOF Ultrasônico Varredura de 360 graus. Figura Extraída de [3]
35 Sensores TOF baseado em Laser Sistemas baseados em laser são chamados de Radar Laser ou LIDAR (Light Detection and Ranging). O primeiro experimento foi desenvolvido no Jet Propulsion Laboratory. O laser é emitido em pulsos rápidos e refletido de volta pelo objeto alvo. A energia que retorna é medida e usada para calcular a distância até o objeto usando a velocidade da luz. Os primeiros sensores laser conseguiam detectar objetos a uma distância máxima de 5m.
36 Sensores TOF baseado em Laser Desenho esquemático de um sensor laser com espelho rotatório. Figura extraída de [3].
37 Sensores TOF baseado em Laser SICK LMS 200 FOV 180 graus. Condições ideais 80 m. Resolução angular 0.25 graus Resolução 10 mm peso 4.5kg. 40ms/scan Hokuyo URG FOV 240 graus. Alcance máximo 5m. Resolução angular 0.36 graus. Resolução 1mm 100ms/scan. 160gramas.
38 Sensores TOF baseado em Laser SICK LMS 200
39 Sensores TOF baseado em Laser Varredura de 360 graus. Figura Extraída de [3]
40 Sensores TOF baseado em Laser Triangularização 1D Figura Extraída de [3]
41 Sensores TOF baseado em Laser Triangularização 2D Figura Extraída de [3]
42 Sensores TOF baseado em Laser - Principais fontes de erros [3]: Objetos escuros ou distantes não produzem estimativas tão boas quanto objetos próximos e brilhantes. Reflexão da energia, similar ao que acontece com TOF ultrasônicos, porém em superfícies altamente lisas ou superfícies muito rugosas. Paredes transparentes, como vidro.
43 BIBLIOGRAFIA [1] R. Murphy. Introduction to AI Robotics, MIT Press, [2] Borenstein, J. Everett, H.R, Feng, L. Where am I? Sensors and methods for Mobile Robot Positioning, disponível para download em [3] Siegwart, R. Nourbakhsh, I. R. Introduction to Autonomous Mobile Robots, MIT Press, 2004.
44 Sensores baseados em Visão Fornecem uma quantidade enorme de informação sobre o ambiente Permitem uma interação rica e inteligente em ambientes dinâmicos. São exemplos de sensores exteroceptivos passivos (sem o uso de flash). Tentam imitar a o sistema visual humano. Tecnologias usadas :CMOS ( Complementary Metal Oxide Semiconductor ) e CCD (Charge-coupled device)
45 Sensores baseados em Visão CCD é um array de elementos sensíveis a luz de tamanho 5 a 25μm, chamados de pixels. Os capacitores de todos os pixels são carregados completamente dando inicio ao período de integração. Quando os fotons atingem cada pixel, eles liberam eletrons que são capturados pelo campo elétrico e retido pelo pixel. Cada pixel acumula um nível de carga baseado no número total de colisões. As cargas relativas de todos os pixels são congeladas e lidas.
46 Sensores baseados em Visão O processo de leitura dos pixels é realizados em uma área específica do CCD. Linha após linha, começando pela última linha do CCD, é transferida para este local e lida. Como as cargas são transportadas através do Chip, elas necessitam de um circuito de controle especializado. Figura extraída de [3]
47 Sensores baseados em Visão CMOS é um array de pixels que acumulam cargas durante o período de integração. Cada pixel possui associado um conjunto de transistores. Figura extraída de [3] O círcuito associado a cada pixel mede e amplifica o sinal do pixel, tudo em paralelo. Em seguida os valores resultantes desta leitura são enviados para seus locais de destino através de fios.
48 Sensores baseados em Visão CMOS não precisa de um circuito e temporizador para transferir os valores de pixels pelo chip. CMOS são mais baratos que CCD e consomem menos energia, em torno de 0.01% da energia consumida pelo CCD. CMOS são menos sensíveis a luz que os CCD. Isso faz com que o CCD produza imagems com mais qualidade que o CMOS. CMOS são susceptiveis a ruído.
49 Sensores baseados em Visão Figura extraída de [4]
50 Sensores baseados em Visão Figura extraída de [4]
51 Trabalho Descrever o funcionamento dos sensores de infravermelho, sensor doppler, active beacons e giroscópio. É importante dar exemplos de aplicações que usem estes sensores.
Sensoriamento 55. Este capítulo apresenta a parte de sensores utilizados nas simulações e nos
 Sensoriamento 55 3 Sensoriamento experimentos. Este capítulo apresenta a parte de sensores utilizados nas simulações e nos 3.1. Sensoriamento da Simulação O modelo de robô utilizado neste trabalho é o
Sensoriamento 55 3 Sensoriamento experimentos. Este capítulo apresenta a parte de sensores utilizados nas simulações e nos 3.1. Sensoriamento da Simulação O modelo de robô utilizado neste trabalho é o
Automação industrial Sensores
 Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Sensores e Atuadores (1)
") (1) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Introdução Sensores Fornecem parâmetros sobre o comportamento do manipulador, geralmente em termos de posição e velocidade
(1) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Introdução Sensores Fornecem parâmetros sobre o comportamento do manipulador, geralmente em termos de posição e velocidade
Introdução. Criar um sistema capaz de interagir com o ambiente. Um transdutor é um componente que transforma um tipo de energia em outro.
 SENSORES Introdução Criar um sistema capaz de interagir com o ambiente. Num circuito eletrônico o sensor é o componente que sente diretamente alguma característica física do meio em que esta inserido,
SENSORES Introdução Criar um sistema capaz de interagir com o ambiente. Num circuito eletrônico o sensor é o componente que sente diretamente alguma característica física do meio em que esta inserido,
ALCANCE DINÂMICO CCD CMOS
 ALCANCE DINÂMICO Nos sensores de imagem CCD (charge-coupled device) ou CMOS (complementary metal oxide semiconductor), o alcance dinâmico (ou dinâmica) é especificado tipicamente como a razão entre o sinal
ALCANCE DINÂMICO Nos sensores de imagem CCD (charge-coupled device) ou CMOS (complementary metal oxide semiconductor), o alcance dinâmico (ou dinâmica) é especificado tipicamente como a razão entre o sinal
Aula 2 Aquisição de Imagens
 Processamento Digital de Imagens Aula 2 Aquisição de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Fundamentos de Imagens Digitais Ocorre a formação de uma imagem quando
Processamento Digital de Imagens Aula 2 Aquisição de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira mvieira@sc.usp.br EESC/USP Fundamentos de Imagens Digitais Ocorre a formação de uma imagem quando
SENSORES REMOTOS. Daniel C. Zanotta 28/03/2015
 SENSORES REMOTOS Daniel C. Zanotta 28/03/2015 ESTRUTURA DE UM SATÉLITE Exemplo: Landsat 5 COMPONENTES DE UM SATÉLITE Exemplo: Landsat 5 LANÇAMENTO FOGUETES DE LANÇAMENTO SISTEMA SENSOR TIPOS DE SENSORES
SENSORES REMOTOS Daniel C. Zanotta 28/03/2015 ESTRUTURA DE UM SATÉLITE Exemplo: Landsat 5 COMPONENTES DE UM SATÉLITE Exemplo: Landsat 5 LANÇAMENTO FOGUETES DE LANÇAMENTO SISTEMA SENSOR TIPOS DE SENSORES
Scanners Manual Básico. Um guia prático e rápido para conhecer o melhor tipo de equipamento para seus trabalhos.
 Scanners Manual Básico Um guia prático e rápido para conhecer o melhor tipo de equipamento para seus trabalhos. Tipos de Scanners Diferentes tipos de scanners funcionam de diferentes maneiras. Conheça
Scanners Manual Básico Um guia prático e rápido para conhecer o melhor tipo de equipamento para seus trabalhos. Tipos de Scanners Diferentes tipos de scanners funcionam de diferentes maneiras. Conheça
SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÃO ELETRÔNICA PROFESSOR: LUCIANO CAVALCANTI SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÃO ELETRÔNICA PROFESSOR: LUCIANO CAVALCANTI SENSOR DE VELOCIDADE Hudson Pinheiro de Andrade
MÓDULO 4 Meios físicos de transmissão
 MÓDULO 4 Meios físicos de transmissão Os meios físicos de transmissão são compostos pelos cabos coaxiais, par trançado, fibra óptica, transmissão a rádio, transmissão via satélite e são divididos em duas
MÓDULO 4 Meios físicos de transmissão Os meios físicos de transmissão são compostos pelos cabos coaxiais, par trançado, fibra óptica, transmissão a rádio, transmissão via satélite e são divididos em duas
ÓPTICA GEOMÉTRICA PREGOLINI
 ÓPTICA GEOMÉTRICA PREGOLINI ÓPTICA GEOMÉTRICA É a parte da Física que estuda os fenômenos relacionados com a luz e sua interação com meios materiais quando as dimensões destes meios é muito maior que o
ÓPTICA GEOMÉTRICA PREGOLINI ÓPTICA GEOMÉTRICA É a parte da Física que estuda os fenômenos relacionados com a luz e sua interação com meios materiais quando as dimensões destes meios é muito maior que o
Os encoders ópticos convertem deslocamentos angulares em uma sequência de pulsos digitais, contando com um só bit ou decodificando um conjunto deles,
 Encoders ópticos O que é: Os encoders ópticos convertem deslocamentos angulares em uma sequência de pulsos digitais, contando com um só bit ou decodificando um conjunto deles, os pulsos podem ser convertidos
Encoders ópticos O que é: Os encoders ópticos convertem deslocamentos angulares em uma sequência de pulsos digitais, contando com um só bit ou decodificando um conjunto deles, os pulsos podem ser convertidos
Introdução aos Sistemas de Informação Geográfica
 Introdução aos Sistemas de Informação Geográfica Mestrado Profissionalizante 2015 Karla Donato Fook karladf@ifma.edu.br IFMA / DAI Motivação Alguns princípios físicos dão suporte ao Sensoriamento Remoto...
Introdução aos Sistemas de Informação Geográfica Mestrado Profissionalizante 2015 Karla Donato Fook karladf@ifma.edu.br IFMA / DAI Motivação Alguns princípios físicos dão suporte ao Sensoriamento Remoto...
Coerência temporal: Uma característica importante
 Coerência temporal: Uma característica importante A coerência temporal de uma fonte de luz é determinada pela sua largura de banda espectral e descreve a forma como os trens de ondas emitidas interfererem
Coerência temporal: Uma característica importante A coerência temporal de uma fonte de luz é determinada pela sua largura de banda espectral e descreve a forma como os trens de ondas emitidas interfererem
ORGANIZAÇÃO DE COMPUTADORES MÓDULO 10
 ORGANIZAÇÃO DE COMPUTADORES MÓDULO 10 Índice 1. A Organização do Computador - Continuação...3 1.1. Memória Primária - II... 3 1.1.1. Memória cache... 3 1.2. Memória Secundária... 3 1.2.1. Hierarquias de
ORGANIZAÇÃO DE COMPUTADORES MÓDULO 10 Índice 1. A Organização do Computador - Continuação...3 1.1. Memória Primária - II... 3 1.1.1. Memória cache... 3 1.2. Memória Secundária... 3 1.2.1. Hierarquias de
ENCODERS. Fig 1 - Princípio de funcionamento de um encoder rotativo.
 ENCODERS Este é sem dúvida nenhuma um dos equipamentos mais usados em Automação Industrial e Mecatrônica, pois com ele conseguimos converter movimentos angulares e lineares em informações úteis à nossa
ENCODERS Este é sem dúvida nenhuma um dos equipamentos mais usados em Automação Industrial e Mecatrônica, pois com ele conseguimos converter movimentos angulares e lineares em informações úteis à nossa
Automação Industrial Parte 5
 Automação Industrial Parte 5 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Sensores capacitivos -Sensores de proximidade capacitivos estão disponíveis em formas e tamanhos
Automação Industrial Parte 5 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Sensores capacitivos -Sensores de proximidade capacitivos estão disponíveis em formas e tamanhos
Física FUVEST ETAPA. ε = 26 cm, e são de um mesmo material, Resposta QUESTÃO 1 QUESTÃO 2. c) Da definição de potência, vem:
 Da definição de potência, vem:") Física QUESTÃO 1 Um contêiner com equipamentos científicos é mantido em uma estação de pesquisa na Antártida. Ele é feito com material de boa isolação térmica e é possível, com um pequeno aquecedor elétrico,
Física QUESTÃO 1 Um contêiner com equipamentos científicos é mantido em uma estação de pesquisa na Antártida. Ele é feito com material de boa isolação térmica e é possível, com um pequeno aquecedor elétrico,
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Sensores. Sensor. Passivos: Chave Potenciômetro Energia Auxiliar. Ativos: Célula Fotoelétrica Cristal Piezoelétrico. Digitais: Encoder Régua Óptica
 Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
1 Problemas de transmissão
 1 Problemas de transmissão O sinal recebido pelo receptor pode diferir do sinal transmitido. No caso analógico há degradação da qualidade do sinal. No caso digital ocorrem erros de bit. Essas diferenças
1 Problemas de transmissão O sinal recebido pelo receptor pode diferir do sinal transmitido. No caso analógico há degradação da qualidade do sinal. No caso digital ocorrem erros de bit. Essas diferenças
OMNI-3MD. Placa Controladora de 3 Motores. Disponível Biblioteca para Arduino. Manual de Hardware. Outubro de 2013
 OMNI-3MD Placa Controladora de 3 Motores Disponível Biblioteca para Arduino Manual de Hardware Outubro de 2013 Copyright 2013, SAR - Soluções de Automação e Robótica, Lda. 1 1 Índice 1 Índice... 2 2 Especificações...
OMNI-3MD Placa Controladora de 3 Motores Disponível Biblioteca para Arduino Manual de Hardware Outubro de 2013 Copyright 2013, SAR - Soluções de Automação e Robótica, Lda. 1 1 Índice 1 Índice... 2 2 Especificações...
Como funciona o Reed-Switches (MEC089)
") Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
Como funciona o Reed-Switches (MEC089) Escrito por Newton C. Braga Um componente de grande utilidade que pode ser usado como sensor em muitas aplicações mecatrônicas, robóticas e de automação é o reed-switch
Encoder Magnético. Contexto Social e Profissional da Engenharia Mecatrônica. Grupo 8: Danilo Zacarias Júnior. Leonardo Maciel Santos Silva
 Encoder Magnético Contexto Social e Profissional da Engenharia Mecatrônica Grupo 8: Danilo Zacarias Júnior Leonardo Maciel Santos Silva Yuri Faria Amorim Índice Resumo... 03 1. Introdução... 04 2. Desenvolvimento...
Encoder Magnético Contexto Social e Profissional da Engenharia Mecatrônica Grupo 8: Danilo Zacarias Júnior Leonardo Maciel Santos Silva Yuri Faria Amorim Índice Resumo... 03 1. Introdução... 04 2. Desenvolvimento...
Como funciona o motor de corrente contínua
 Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
Como funciona o motor de corrente contínua Escrito por Newton C. Braga Este artigo é de grande utilidade para todos que utilizam pequenos motores, principalmente os projetistas mecatrônicos. Como o artigo
. linear ou rotativo. analógico ou digital. absoluto, incremental ou incremental-absoluto. princípio de operação
 8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
8 - Transdutores Um transdut or é um equipamento que converte variações de uma determinada grandeza física em outra. Por exemplo, um transdut or de posição converte variações de movimento em um sinal de
Universidade Federal do Paraná Departamento de Informática Ciência da Computação. Prof. Eduardo Todt 2015 todt@ieee.org
 Universidade Federal do Paraná Departamento de Informática Ciência da Computação Prof. Eduardo Todt 2015 todt@ieee.org Adquirir conhecimento sobre o ambiente Fornecer realimentação para controle em tarefas
Universidade Federal do Paraná Departamento de Informática Ciência da Computação Prof. Eduardo Todt 2015 todt@ieee.org Adquirir conhecimento sobre o ambiente Fornecer realimentação para controle em tarefas
Entrada e Saída. Prof. Leonardo Barreto Campos 1
 Entrada e Saída Prof. Leonardo Barreto Campos 1 Sumário Introdução; Dispositivos Externos; E/S Programada; E/S Dirigida por Interrupção; Acesso Direto à Memória; Bibliografia. Prof. Leonardo Barreto Campos
Entrada e Saída Prof. Leonardo Barreto Campos 1 Sumário Introdução; Dispositivos Externos; E/S Programada; E/S Dirigida por Interrupção; Acesso Direto à Memória; Bibliografia. Prof. Leonardo Barreto Campos
ESPECIFICAÇÕES TÉCNICAS SENSOR MATRIX
 ESPECIFICAÇÕES TÉCNICAS SENSOR MATRIX 1. DEFINIÇÃO O Sensor Matrix é uma nova geração de sensores de contagem automática de pessoas que utiliza o processamento de imagens 3D pelo método TOF (Time of Flight,
ESPECIFICAÇÕES TÉCNICAS SENSOR MATRIX 1. DEFINIÇÃO O Sensor Matrix é uma nova geração de sensores de contagem automática de pessoas que utiliza o processamento de imagens 3D pelo método TOF (Time of Flight,
Comunicação de Dados. Aula 9 Meios de Transmissão
 Comunicação de Dados Aula 9 Meios de Transmissão Sumário Meios de Transmissão Transmissão guiada Cabo par trançado Coaxial Fibra ótica Transmissão sem fio Ondas de rádio Micro ondas Infravermelho Exercícios
Comunicação de Dados Aula 9 Meios de Transmissão Sumário Meios de Transmissão Transmissão guiada Cabo par trançado Coaxial Fibra ótica Transmissão sem fio Ondas de rádio Micro ondas Infravermelho Exercícios
Sensores Ultrasônicos
 Sensores Ultrasônicos Introdução A maioria dos transdutores de ultra-som utiliza materiais piezelétricos para converter energia elétrica em mecânica e vice-versa. Um transdutor de Ultra-som é basicamente
Sensores Ultrasônicos Introdução A maioria dos transdutores de ultra-som utiliza materiais piezelétricos para converter energia elétrica em mecânica e vice-versa. Um transdutor de Ultra-som é basicamente
3. Arquitetura Básica do Computador
 3. Arquitetura Básica do Computador 3.1. Modelo de Von Neumann Dar-me-eis um grão de trigo pela primeira casa do tabuleiro; dois pela segunda, quatro pela terceira, oito pela quarta, e assim dobrando sucessivamente,
3. Arquitetura Básica do Computador 3.1. Modelo de Von Neumann Dar-me-eis um grão de trigo pela primeira casa do tabuleiro; dois pela segunda, quatro pela terceira, oito pela quarta, e assim dobrando sucessivamente,
Setores Trilhas. Espaço entre setores Espaço entre trilhas
 Memória Externa Disco Magnético O disco magnético é constituído de um prato circular de metal ou plástico, coberto com um material que poder magnetizado. Os dados são gravados e posteriormente lidos do
Memória Externa Disco Magnético O disco magnético é constituído de um prato circular de metal ou plástico, coberto com um material que poder magnetizado. Os dados são gravados e posteriormente lidos do
UNIDADE I Aula 5 Fontes de Distorção de Sinais em Transmissão. Fonte: Rodrigo Semente
 UNIDADE I Aula 5 Fontes de Distorção de Sinais em Transmissão Fonte: Rodrigo Semente A Distorção, em Sistemas de Comunicação, pode ser entendida como uma ação que tem como objetivo modificar as componentes
UNIDADE I Aula 5 Fontes de Distorção de Sinais em Transmissão Fonte: Rodrigo Semente A Distorção, em Sistemas de Comunicação, pode ser entendida como uma ação que tem como objetivo modificar as componentes
INTRODUÇÃO A ROBÓTICA
 INTRODUÇÃO A ROBÓTICA RODRIGO PENIDO DE AGUIAR COLÉGIO SÃO PAULO 2015 O que é robótica? A robótica é ciência que estuda a construção de robôs e computação. Ela trata de sistemas compostos por partes mecânicas
INTRODUÇÃO A ROBÓTICA RODRIGO PENIDO DE AGUIAR COLÉGIO SÃO PAULO 2015 O que é robótica? A robótica é ciência que estuda a construção de robôs e computação. Ela trata de sistemas compostos por partes mecânicas
Ensaio de Emissão Acústica Aplicado em Cilindros sem Costura para Armazenamento de Gases
 Ensaio de Emissão Acústica Aplicado em Cilindros sem Costura para Armazenamento de Gases Pedro Feres Filho São Paulo, Brasil e-mail: pedro@pasa.com.br 1- Resumo Este trabalho teve como objetivo apresentar
Ensaio de Emissão Acústica Aplicado em Cilindros sem Costura para Armazenamento de Gases Pedro Feres Filho São Paulo, Brasil e-mail: pedro@pasa.com.br 1- Resumo Este trabalho teve como objetivo apresentar
Laboratório Virtual Kit Óptico
 Laboratório Virtual Kit Óptico Reflexão A luz nem sempre se propaga indefinidamente em linha reta: em algumas situações eles podem se quebrar, como acontece quando um espelho é colocado em seu caminho.
Laboratório Virtual Kit Óptico Reflexão A luz nem sempre se propaga indefinidamente em linha reta: em algumas situações eles podem se quebrar, como acontece quando um espelho é colocado em seu caminho.
Construindo a câmara escura
 Construindo a câmara escura Shizue Introdução Captar e registrar imagens tornou-se possível com a câmara escura de orifício. Essa câmara nada mais é do que uma lata, preta por dentro para não refletir
Construindo a câmara escura Shizue Introdução Captar e registrar imagens tornou-se possível com a câmara escura de orifício. Essa câmara nada mais é do que uma lata, preta por dentro para não refletir
Realizando o ensaio de ultra-som
 Realizando o ensaio de ultra-som A UU L AL A Na aula anterior, você ficou sabendo que o ultra-som é uma onda mecânica que se propaga de uma fonte emissora até uma fonte receptora, através de um meio físico.
Realizando o ensaio de ultra-som A UU L AL A Na aula anterior, você ficou sabendo que o ultra-som é uma onda mecânica que se propaga de uma fonte emissora até uma fonte receptora, através de um meio físico.
Notas de Aplicação. Utilizando ZAP500 com. Encoders. HI Tecnologia. Documento de acesso publico / corporativo
 Notas de Aplicação Utilizando ZAP500 com Encoders HI Tecnologia Documento de acesso publico / corporativo ENA.00015 Versão 1.01 dezembro-2013 HI Tecnologia Utilizando ZAP500 com Encoders Apresentação Esta
Notas de Aplicação Utilizando ZAP500 com Encoders HI Tecnologia Documento de acesso publico / corporativo ENA.00015 Versão 1.01 dezembro-2013 HI Tecnologia Utilizando ZAP500 com Encoders Apresentação Esta
SPS ZOOM 300. 3D Laser Scanner
 3D Laser Scanner 3D Laser Scanner O 3D laser scanner é um equipamento que faz coletas de dados espaciais precisos de objetos ou ambientes. As nuvens de pontos coletadas podem ser utilizadas para construção
3D Laser Scanner 3D Laser Scanner O 3D laser scanner é um equipamento que faz coletas de dados espaciais precisos de objetos ou ambientes. As nuvens de pontos coletadas podem ser utilizadas para construção
Aula V Medição de Variáveis Mecânicas
 Aula V Medição de Variáveis Mecânicas Universidade Federal da Bahia Escola Politécnica Disciplina: Instrumentação e Automação Industrial I(ENGF99) Professor: Eduardo Simas(eduardo.simas@ufba.br) Sensores
Aula V Medição de Variáveis Mecânicas Universidade Federal da Bahia Escola Politécnica Disciplina: Instrumentação e Automação Industrial I(ENGF99) Professor: Eduardo Simas(eduardo.simas@ufba.br) Sensores
consideradas, entretanto, existem sonares mais sofisticados que são capazes de registrar outros tipos de informações.
 1 Introdução A robótica ocupa um papel fundamental na indústria. O emprego de manipuladores e máquinas capazes de automatizar processos repetitivos, cansativos, perigosos e inslubre para o ser humano eleva
1 Introdução A robótica ocupa um papel fundamental na indústria. O emprego de manipuladores e máquinas capazes de automatizar processos repetitivos, cansativos, perigosos e inslubre para o ser humano eleva
6 Conclusões e Trabalhos futuros 6.1. Conclusões
 6 Conclusões e Trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se o comportamento do sistema que foi denominado pendulo planar com a adição de uma roda de reação na haste do pendulo composta de
6 Conclusões e Trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se o comportamento do sistema que foi denominado pendulo planar com a adição de uma roda de reação na haste do pendulo composta de
Universidade Federal de Pernambuco
 Universidade Federal de Pernambuco Graduação em Engenharia da Computação Centro de Informática 2D Feature Distance Estimation for Indoor Environments using 2D laser range data Proposta de Trabalho de Graduação
Universidade Federal de Pernambuco Graduação em Engenharia da Computação Centro de Informática 2D Feature Distance Estimation for Indoor Environments using 2D laser range data Proposta de Trabalho de Graduação
Redes de Computadores (RCOMP 2014/2015)
") Redes de Computadores (RCOMP 2014/2015) Transmissão de Dados Digitais Comunicação em rede 1 Transmissão de dados Objetivo: transportar informação mesmo que fosse usado um meio de transporte clássico seria
Redes de Computadores (RCOMP 2014/2015) Transmissão de Dados Digitais Comunicação em rede 1 Transmissão de dados Objetivo: transportar informação mesmo que fosse usado um meio de transporte clássico seria
A luz propaga-se em linha recta e radialmente em todas as direcções sempre que a velocidade de propagação for constante.
 Propagação da luz A luz propaga-se em linha recta e radialmente em todas as direcções sempre que a velocidade de propagação for constante. Ao propagar-se, a luz pode atravessar materiais transparentes
Propagação da luz A luz propaga-se em linha recta e radialmente em todas as direcções sempre que a velocidade de propagação for constante. Ao propagar-se, a luz pode atravessar materiais transparentes
UNIVERSIDADE CATÓLICA DE PETRÓPOLIS CENTRO DE ENGENHARIA E COMPUTAÇÃO
 UNIVERSIDADE CATÓLICA DE PETRÓPOLIS CENTRO DE ENGENHARIA E COMPUTAÇÃO Amanda 5ª Atividade: Codificador e codificação de linha e seu uso em transmissão digital Petrópolis, RJ 2012 Codificador: Um codoficador
UNIVERSIDADE CATÓLICA DE PETRÓPOLIS CENTRO DE ENGENHARIA E COMPUTAÇÃO Amanda 5ª Atividade: Codificador e codificação de linha e seu uso em transmissão digital Petrópolis, RJ 2012 Codificador: Um codoficador
Todo o conjunto que compõe a visão humana é chamado globo ocular.
 Olho humano O olho humano é um sistema óptico complexo, formado por vários meios transparentes além de um sistema fisiológico com inúmeros componentes. Olho humano Todo o conjunto que compõe a visão humana
Olho humano O olho humano é um sistema óptico complexo, formado por vários meios transparentes além de um sistema fisiológico com inúmeros componentes. Olho humano Todo o conjunto que compõe a visão humana
ni.com Série de conceitos básicos de medições com sensores
 Série de conceitos básicos de medições com sensores Medições de posição e frequência Renan Azevedo Engenheiro de Produto, DAQ & Teste NI Henrique Sanches Marketing Técnico, LabVIEW NI Pontos principais
Série de conceitos básicos de medições com sensores Medições de posição e frequência Renan Azevedo Engenheiro de Produto, DAQ & Teste NI Henrique Sanches Marketing Técnico, LabVIEW NI Pontos principais
Sistemas Operacionais Gerência de Dispositivos
 Universidade Estadual de Mato Grosso do Sul UEMS Curso de Licenciatura em Computação Sistemas Operacionais Gerência de Dispositivos Prof. José Gonçalves Dias Neto profneto_ti@hotmail.com Introdução A gerência
Universidade Estadual de Mato Grosso do Sul UEMS Curso de Licenciatura em Computação Sistemas Operacionais Gerência de Dispositivos Prof. José Gonçalves Dias Neto profneto_ti@hotmail.com Introdução A gerência
Programa de Atualização de Pontos do Lince GPS
 Esse programa atualiza os pontos do software Lince GSP em aparelhos portáteis, como navegadores e celulares. A Robotron mantém um serviço de fornecimento de pontos de controle de velocidade aos aparelhos
Esse programa atualiza os pontos do software Lince GSP em aparelhos portáteis, como navegadores e celulares. A Robotron mantém um serviço de fornecimento de pontos de controle de velocidade aos aparelhos
UFSM-CTISM. Comunicação de Dados Capacidade de canal Aula-12
 UFSM-CTISM Comunicação de Dados Capacidade de canal Aula-12 Professor: Andrei Piccinini Legg Santa Maria, 2012 O pode ser definido como todo e qualquer tipo de interfência externa que exercida sobre um
UFSM-CTISM Comunicação de Dados Capacidade de canal Aula-12 Professor: Andrei Piccinini Legg Santa Maria, 2012 O pode ser definido como todo e qualquer tipo de interfência externa que exercida sobre um
Óptica. Estudo da luz, como sendo a onda eletromagnética pertencentes à faixa do espectro visível (comprimento de 400 nm até 700 nm).
.") Óptica Estudo da luz, como sendo a onda eletromagnética pertencentes à faixa do espectro visível (comprimento de 400 nm até 700 nm). Fenômenos ópticos Professor: Éder (Boto) Sobre a Luz O que emite Luz?
Óptica Estudo da luz, como sendo a onda eletromagnética pertencentes à faixa do espectro visível (comprimento de 400 nm até 700 nm). Fenômenos ópticos Professor: Éder (Boto) Sobre a Luz O que emite Luz?
Distância de acionamento. Distância sensora nominal (Sn) Distância sensora efetiva (Su) Distância sensora real (Sr) 15/03/2015
 Distância sensora efetiva (Su) Distância sensora real (Sr) 15/03/2015") Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Sensores São dispositivos que
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Sensores São dispositivos que
André Aziz (andreaziz.ufrpe@gmail.com) Francielle Santos (francielle.ufrpe@gmail.com) Noções de Redes
 Francielle Santos (francielle.ufrpe@gmail.com) Noções de Redes") André Aziz (andreaziz.ufrpe@gmail.com) Francielle Santos (francielle.ufrpe@gmail.com) Noções de Redes Noções de Redes: Estrutura básica; Tipos de transmissão; Meios de transmissão; Topologia de redes;
André Aziz (andreaziz.ufrpe@gmail.com) Francielle Santos (francielle.ufrpe@gmail.com) Noções de Redes Noções de Redes: Estrutura básica; Tipos de transmissão; Meios de transmissão; Topologia de redes;
Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um
 e transmitem um sinal para um") Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de medição ou controle. 1 Cite 05 tipos
Que são sensores? São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e transmitem um sinal para um dispositivo de medição ou controle. 1 Cite 05 tipos
Sensoriamento A UU L AL A. Um problema. Exemplos de aplicações
 A UU L AL A Sensoriamento Atualmente, é muito comum nos depararmos com situações em que devemos nos preocupar com a segurança pessoal e de nossos bens e propriedades. Daí decorre a necessidade de adquirir
A UU L AL A Sensoriamento Atualmente, é muito comum nos depararmos com situações em que devemos nos preocupar com a segurança pessoal e de nossos bens e propriedades. Daí decorre a necessidade de adquirir
TIPOS DE termômetros. e termômetros ESPECIAIS. Pirômetros ópticos
 Pirômetros ópticos TIPOS DE termômetros e termômetros ESPECIAIS A ideia de construir um pirômetro óptico surgiu em meados do século XIX como consequência dos estudos da radiação dos sólidos aquecidos.
Pirômetros ópticos TIPOS DE termômetros e termômetros ESPECIAIS A ideia de construir um pirômetro óptico surgiu em meados do século XIX como consequência dos estudos da radiação dos sólidos aquecidos.
REPRESENTAÇÃO DA IMAGEM DIGITAL
 REPRESENTAÇÃO DA IMAGEM DIGITAL Representação da imagem Uma imagem é uma função de intensidade luminosa bidimensional f(x,y) que combina uma fonte de iluminação e a reflexão ou absorção de energia a partir
REPRESENTAÇÃO DA IMAGEM DIGITAL Representação da imagem Uma imagem é uma função de intensidade luminosa bidimensional f(x,y) que combina uma fonte de iluminação e a reflexão ou absorção de energia a partir
Fabio Bento fbento@ifes.edu.br
 Fabio Bento fbento@ifes.edu.br Eletrônica Digital Sistemas de Numeração e Códigos 1. Conversões de Binário para Decimal 2. Conversões de Decimal para Binário 3. Sistema de Numeração Hexadecimal 4. Código
Fabio Bento fbento@ifes.edu.br Eletrônica Digital Sistemas de Numeração e Códigos 1. Conversões de Binário para Decimal 2. Conversões de Decimal para Binário 3. Sistema de Numeração Hexadecimal 4. Código
Tânia observa um lápis com o auxílio de uma lente, como representado nesta figura:
 PROVA DE FÍSICA QUESTÃO 0 Tânia observa um lápis com o auxílio de uma lente, como representado nesta figura: Essa lente é mais fina nas bordas que no meio e a posição de cada um de seus focos está indicada
PROVA DE FÍSICA QUESTÃO 0 Tânia observa um lápis com o auxílio de uma lente, como representado nesta figura: Essa lente é mais fina nas bordas que no meio e a posição de cada um de seus focos está indicada
SISTEMA DE APONTAMENTO
 Introdução SISTEMA DE APONTAMENTO Alunos: Lucas Castro Faria Carolina do Amaral Galhardo Orientador: Hans Ingo Weber Foi feito um estudo para aquisição de dados através da placa NI USB-6229, usando o programa
Introdução SISTEMA DE APONTAMENTO Alunos: Lucas Castro Faria Carolina do Amaral Galhardo Orientador: Hans Ingo Weber Foi feito um estudo para aquisição de dados através da placa NI USB-6229, usando o programa
Luz, olho humano e óculos Capítulo 12 (pág. 219)
") Luz, olho humano e óculos Capítulo 12 (pág. 219) Raios de Luz - Alguns filósofos gregos pensavam que nossos olhos emitiam raios que permitiam enxergar os objetos; - Só nos é possível ver quando há luz
Luz, olho humano e óculos Capítulo 12 (pág. 219) Raios de Luz - Alguns filósofos gregos pensavam que nossos olhos emitiam raios que permitiam enxergar os objetos; - Só nos é possível ver quando há luz
Oficina de fotografia e tratamento de imagem. Facilitadora: Camila Silva Aula: 01
 Oficina de fotografia e tratamento de imagem Facilitadora: Camila Silva Aula: 01 Histórico da Fotografia A fotografia surgiu do desejo do homem retratar o mundo a sua volta. Desde os primórdios, com a
Oficina de fotografia e tratamento de imagem Facilitadora: Camila Silva Aula: 01 Histórico da Fotografia A fotografia surgiu do desejo do homem retratar o mundo a sua volta. Desde os primórdios, com a
Conjunto Sensor IR Para quem tem fome de vencer
 Conjunto Sensor IR Para quem tem fome de vencer Introdução: Muito obrigado por adquirir este produto. Ele foi projetado de forma a oferecer a melhor performance possível dentro de sua aplicação. Fornecemos
Conjunto Sensor IR Para quem tem fome de vencer Introdução: Muito obrigado por adquirir este produto. Ele foi projetado de forma a oferecer a melhor performance possível dentro de sua aplicação. Fornecemos
LEIA TODO O CONTEÚDO DESTE MANUAL ANTES DE INICIAR A INSTALAÇÃO
 30 Kg Rev. 0 - Jan/09 MANUAL DE INSTALAÇÃO LEIA TODO O CONTEÚDO DESTE MANUAL ANTES DE INICIAR A INSTALAÇÃO Esta página foi intencionalmente deixada em branco. DESCRIÇÃO O sensor de dupla tecnologia duoguard
30 Kg Rev. 0 - Jan/09 MANUAL DE INSTALAÇÃO LEIA TODO O CONTEÚDO DESTE MANUAL ANTES DE INICIAR A INSTALAÇÃO Esta página foi intencionalmente deixada em branco. DESCRIÇÃO O sensor de dupla tecnologia duoguard
Motores em miniatura proporcionam um grande desempenho para analisadores médicos
 thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
thinkmotion Motores em miniatura proporcionam um grande desempenho para analisadores médicos Os analisadores médicos são elementos fundamentais do setor de diagnósticos médicos. São ferramentas versáteis
ÓTICA e ONDAS. Ótica estudo da luz e dos fenômenos luminosos em geral.
 1 ÓTICA e ONDAS Ótica estudo da luz e dos fenômenos luminosos em geral. Propagação Retilínea da Luz Observando os corpos que nos rodeiam, verificamos que alguns deles emitem luz, isto é, são fontes de
1 ÓTICA e ONDAS Ótica estudo da luz e dos fenômenos luminosos em geral. Propagação Retilínea da Luz Observando os corpos que nos rodeiam, verificamos que alguns deles emitem luz, isto é, são fontes de
Sensoriamento Remoto. Características das Imagens Orbitais
 Sensoriamento Remoto Características das Imagens Orbitais 1 - RESOLUÇÃO: O termo resolução em sensoriamento remoto pode ser atribuído a quatro diferentes parâmetros: resolução espacial resolução espectral
Sensoriamento Remoto Características das Imagens Orbitais 1 - RESOLUÇÃO: O termo resolução em sensoriamento remoto pode ser atribuído a quatro diferentes parâmetros: resolução espacial resolução espectral
Montagem, Manutenção e Configuração de Computadores Pessoais
 Montagem, Manutenção e Configuração de Computadores Pessoais Autor: Edson D Avila Código: 489X Edição 17ª Categoria: Hardware N.Páginas: 280 Formato: 17 x 24 cm Edição: 18 a ed. Peso: 0,471 kg Preço: R$
Montagem, Manutenção e Configuração de Computadores Pessoais Autor: Edson D Avila Código: 489X Edição 17ª Categoria: Hardware N.Páginas: 280 Formato: 17 x 24 cm Edição: 18 a ed. Peso: 0,471 kg Preço: R$
Conversão Analógica Digital
 Slide 1 Conversão Analógica Digital Até agora, discutimos principalmente sinais contínuos (analógicos), mas, atualmente, a maioria dos cálculos e medições é realizada com sistemas digitais. Assim, precisamos
Slide 1 Conversão Analógica Digital Até agora, discutimos principalmente sinais contínuos (analógicos), mas, atualmente, a maioria dos cálculos e medições é realizada com sistemas digitais. Assim, precisamos
Processamento de Imagem. Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com
 Processamento de Imagem Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Visão Computacional Não existe um consenso entre os autores sobre o correto escopo do processamento de imagens, a
Processamento de Imagem Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Visão Computacional Não existe um consenso entre os autores sobre o correto escopo do processamento de imagens, a
Itinerários de Ônibus Relatório Final
 CENTRO UNIVERSITÁRIO SENAC Itinerários de Ônibus Relatório Final Grupo 5 Caio Roque Daniel Nunes Elise Roese José Caneiro Marcos Grignani São Paulo Junho de 2007 1 ÍNDICE 1. Introdução... 3 2. Desenvolvimento...
CENTRO UNIVERSITÁRIO SENAC Itinerários de Ônibus Relatório Final Grupo 5 Caio Roque Daniel Nunes Elise Roese José Caneiro Marcos Grignani São Paulo Junho de 2007 1 ÍNDICE 1. Introdução... 3 2. Desenvolvimento...
Modelagem de Circuitos Digitais
 1 Modelagem de Circuitos Digitais Para modelar um circuito digital para realizar uma determinada operação: Analisar problema Identificar sinais de entrada do circuito Identificar sinais de saída do circuito
1 Modelagem de Circuitos Digitais Para modelar um circuito digital para realizar uma determinada operação: Analisar problema Identificar sinais de entrada do circuito Identificar sinais de saída do circuito
PROCESSAMENTO DE IMAGEM #01 TÓPICOS DESENVOLVIDOS NESTE MÓDULO
 PROCESSAMENTO DE IMAGEM #01 TÓPICOS DESENVOLVIDOS NESTE MÓDULO Que é Processamento Digital de Imagens (PDI) Quais as etapas fundamentais em um sistema de PDI Sensores CCD e CMOS Visão Humana x Visão de
PROCESSAMENTO DE IMAGEM #01 TÓPICOS DESENVOLVIDOS NESTE MÓDULO Que é Processamento Digital de Imagens (PDI) Quais as etapas fundamentais em um sistema de PDI Sensores CCD e CMOS Visão Humana x Visão de
Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles!
 Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles! É importante lembrar que esta matéria serve para qualquer tipo de servo utilizado em aeromodelismo. Figura 1 Um dos diversos
Servos - Analo gicos e Digitais - Funcionamento, uso e diferenças entre eles! É importante lembrar que esta matéria serve para qualquer tipo de servo utilizado em aeromodelismo. Figura 1 Um dos diversos
Aula 1 Professor Waterloo Pereira Filho Docentes orientados: Daniela Barbieri Felipe Correa
 Princípios Físicos do Sensoriamento Remoto Aula 1 Professor Waterloo Pereira Filho Docentes orientados: Daniela Barbieri Felipe Correa O que é Sensoriamento Remoto? Utilização conjunta de sensores, equipamentos
Princípios Físicos do Sensoriamento Remoto Aula 1 Professor Waterloo Pereira Filho Docentes orientados: Daniela Barbieri Felipe Correa O que é Sensoriamento Remoto? Utilização conjunta de sensores, equipamentos
1. Potenciômetros 2. LVDTs 3. RVDTs 4. Resolver (Singlsyn ) 5. Encoders 6. Tacogeradores
 5. Encoders 6. Tacogeradores") Sensores de Posição e Velocidade 1. Potenciômetros 2. LVDTs 3. RVDTs 4. Resolver (Singlsyn ) 5. Encoders 6. Tacogeradores Potenciômetros FUNCIONAMENTO OBJETIVO Medir movimentos lineares e angulares Resistência
Sensores de Posição e Velocidade 1. Potenciômetros 2. LVDTs 3. RVDTs 4. Resolver (Singlsyn ) 5. Encoders 6. Tacogeradores Potenciômetros FUNCIONAMENTO OBJETIVO Medir movimentos lineares e angulares Resistência
Guia de consulta rápida
 Guia de consulta rápida DigiFlash Smart Trigger 1 2 3 4 5 17 Smart Trigger 6 7 8 9 16 15 14 13 12 11 10 O DigiFlash Smart Trigger é um dispositivo para disparar flashes a partir de um evento externo. Pode
Guia de consulta rápida DigiFlash Smart Trigger 1 2 3 4 5 17 Smart Trigger 6 7 8 9 16 15 14 13 12 11 10 O DigiFlash Smart Trigger é um dispositivo para disparar flashes a partir de um evento externo. Pode
A câmera As lentes A exposição
 A câmera As lentes A exposição 1 Corpo da câmera: a caixa sem as objetivas e os demais acessórios. Objetiva: as lentes intercambiáveis. Diafragma: dispositivo que controla a quantidade de luz que passa
A câmera As lentes A exposição 1 Corpo da câmera: a caixa sem as objetivas e os demais acessórios. Objetiva: as lentes intercambiáveis. Diafragma: dispositivo que controla a quantidade de luz que passa
Sensores de deslocamento
 Instrumentação Industrial - 1 Sensores de deslocamento Introdução Os sensores de deslocamento, de uma maneira geral, são instrumentos usados para medir o movimento de um corpo. Este movimento pode ser
Instrumentação Industrial - 1 Sensores de deslocamento Introdução Os sensores de deslocamento, de uma maneira geral, são instrumentos usados para medir o movimento de um corpo. Este movimento pode ser
Antenas Parabólicas -- Apostila Básica
 Antenas Parabólicas -- Apostila Básica Antenas parabólicas são usadas em UHF e Microondas. Possuem uma alta diretividade o que nos leva a perceber que possuem um alto ganho. Uma antena receptora de satélites
Antenas Parabólicas -- Apostila Básica Antenas parabólicas são usadas em UHF e Microondas. Possuem uma alta diretividade o que nos leva a perceber que possuem um alto ganho. Uma antena receptora de satélites
Luis Filipe Baptista MEMM 2
 INSTRUMENTAÇÃO E CONTROLO CAPÍTULO V Transdutores Optoelectrónicos 2012/2013 Índice do capítulo Introdução Transdutores ópticos Transdutores optoelectrónicos - Absolutos - Incrementais Aplicações industriais
INSTRUMENTAÇÃO E CONTROLO CAPÍTULO V Transdutores Optoelectrónicos 2012/2013 Índice do capítulo Introdução Transdutores ópticos Transdutores optoelectrónicos - Absolutos - Incrementais Aplicações industriais
Redes de Computadores
 Redes de Computadores Cabeamento Gustavo Reis gustavo.reis@ifsudestemg.edu.br Os cabos são usados como meio de comunicação há mais de 150 anos. A primeira implantação em larga escala de comunicações via
Redes de Computadores Cabeamento Gustavo Reis gustavo.reis@ifsudestemg.edu.br Os cabos são usados como meio de comunicação há mais de 150 anos. A primeira implantação em larga escala de comunicações via
IP Camera Tutorial. CNet Technology Jan 2008
 IP Camera Tutorial CNet Technology Jan 2008 O que é Câmera IP? Camera IP é a combinação entre câmera e computador. As câmeras podem ser conectadas diretamente na sua rede. Ela possui internamente software
IP Camera Tutorial CNet Technology Jan 2008 O que é Câmera IP? Camera IP é a combinação entre câmera e computador. As câmeras podem ser conectadas diretamente na sua rede. Ela possui internamente software
Conceitos Fundamentais de Eletrônica
 Conceitos Fundamentais de Eletrônica A eletrônica está fundamentada sobre os conceitos de tensão, corrente e resistência. Podemos entender como tensão a energia potencial armazenada em uma pilha ou bateria
Conceitos Fundamentais de Eletrônica A eletrônica está fundamentada sobre os conceitos de tensão, corrente e resistência. Podemos entender como tensão a energia potencial armazenada em uma pilha ou bateria
Sinal analógico x sinal digital. Sinal analógico. Exemplos de variações nas grandezas básicas. Grandezas básicas em sinais periódicos
 Plano Redes de Computadores Transmissão de Informações nálise de Sinais ula 04 Introdução Dados, sinais e transmissão Sinal analógico x sinal digital Sinais analógicos Grandezas básicas Domínio tempo x
Plano Redes de Computadores Transmissão de Informações nálise de Sinais ula 04 Introdução Dados, sinais e transmissão Sinal analógico x sinal digital Sinais analógicos Grandezas básicas Domínio tempo x
Visão humana. Guillermo Cámara-Chávez
 Visão humana Guillermo Cámara-Chávez Cor e visão humana Como uma imagem é formada? Uma imagem é formada a partir da quantidade de luz refletida ou emitida pelo objeto observado. Cor e visão humana Cor
Visão humana Guillermo Cámara-Chávez Cor e visão humana Como uma imagem é formada? Uma imagem é formada a partir da quantidade de luz refletida ou emitida pelo objeto observado. Cor e visão humana Cor
Programa de Instalação do Lince GPS
 Esse programa instala o software Lince GSP em aparelhos portáteis que tenham GPS, como navegadores e celulares. O software Lince GPS é um programa destinado a alertar sobre a aproximação a pontos previamente
Esse programa instala o software Lince GSP em aparelhos portáteis que tenham GPS, como navegadores e celulares. O software Lince GPS é um programa destinado a alertar sobre a aproximação a pontos previamente
Tópicos em Meio Ambiente e Ciências Atmosféricas
 INPE-13139-PRE/8398 SENSORIAMENTO REMOTO Tania Sausen Tópicos em Meio Ambiente e Ciências Atmosféricas INPE São José dos Campos 2005 MEIO AMBIENTE E CIÊNCIAS ATMOSFÉRICAS 8 Sensoriamento Remoto Tania Sauzen
INPE-13139-PRE/8398 SENSORIAMENTO REMOTO Tania Sausen Tópicos em Meio Ambiente e Ciências Atmosféricas INPE São José dos Campos 2005 MEIO AMBIENTE E CIÊNCIAS ATMOSFÉRICAS 8 Sensoriamento Remoto Tania Sauzen
O que são satélites? Existem 2 tipos de satélite, são os satélites naturais e satélites artificiais.
 O que são satélites? Existem 2 tipos de satélite, são os satélites naturais e satélites artificiais. Satélites naturais são: a Lua que gravita em torno da Terra. Satélites artificiais são: dispositivos,
O que são satélites? Existem 2 tipos de satélite, são os satélites naturais e satélites artificiais. Satélites naturais são: a Lua que gravita em torno da Terra. Satélites artificiais são: dispositivos,
Memórias Prof. Galvez Gonçalves
 Arquitetura e Organização de Computadores 1 s Prof. Galvez Gonçalves Objetivo: Compreender os tipos de memória e como elas são acionadas nos sistemas computacionais modernos. INTRODUÇÃO Nas aulas anteriores
Arquitetura e Organização de Computadores 1 s Prof. Galvez Gonçalves Objetivo: Compreender os tipos de memória e como elas são acionadas nos sistemas computacionais modernos. INTRODUÇÃO Nas aulas anteriores
Conversores D/A e A/D
 Conversores D/A e A/D Introdução Um sinal analógico varia continuamente no tempo. Som Temperatura Pressão Um sinal digital varia discretamente no tempo. Processamento de sinais digitais Tecnologia amplamente
Conversores D/A e A/D Introdução Um sinal analógico varia continuamente no tempo. Som Temperatura Pressão Um sinal digital varia discretamente no tempo. Processamento de sinais digitais Tecnologia amplamente
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
Alguma das vantagens e desvantagens dos computadores ópticos é apresenta a seguir.
 Computação Óptica Introdução Um dos grandes obstáculos para aprimorar o desempenho dos computadores modernos está relacionado com a tecnologia convencional dos semicondutores, que está alcançando o seu
Computação Óptica Introdução Um dos grandes obstáculos para aprimorar o desempenho dos computadores modernos está relacionado com a tecnologia convencional dos semicondutores, que está alcançando o seu
Antena Escrito por André
 Antena Escrito por André Antenas A antena é um dispositivo passivo que emite ou recebe energia eletromagnéticas irradiada. Em comunicações radioelétricas é um dispositivo fundamental. Alcance de uma Antena
Antena Escrito por André Antenas A antena é um dispositivo passivo que emite ou recebe energia eletromagnéticas irradiada. Em comunicações radioelétricas é um dispositivo fundamental. Alcance de uma Antena
1 a QUESTÃO: (2,0 pontos) Avaliador Revisor
 Avaliador Revisor") 1 a QUESTÃO: (2,0 pontos) Avaliador Revisor A figura abaixo exibe uma fotografia estroboscópica (de exposição múltipla) do movimento de um disco com 2,0 kg de massa sendo puxado por uma força constante
1 a QUESTÃO: (2,0 pontos) Avaliador Revisor A figura abaixo exibe uma fotografia estroboscópica (de exposição múltipla) do movimento de um disco com 2,0 kg de massa sendo puxado por uma força constante
Ondas II F-228 UNICAMP
 Ondas II F-228 UNICAMP http://thenonist.com/index.php/thenonist/permalink/stick_charts/ Superposição de ondas Resumo de ondas mecânicas Superposição de ondas Exemplos Representação matemática Interferência
Ondas II F-228 UNICAMP http://thenonist.com/index.php/thenonist/permalink/stick_charts/ Superposição de ondas Resumo de ondas mecânicas Superposição de ondas Exemplos Representação matemática Interferência