TDP do time RECIFE SOCCER Futebol SPL
|
|
|
- Danilo Zagalo Branco
- 7 Há anos
- Visualizações:
Transcrição

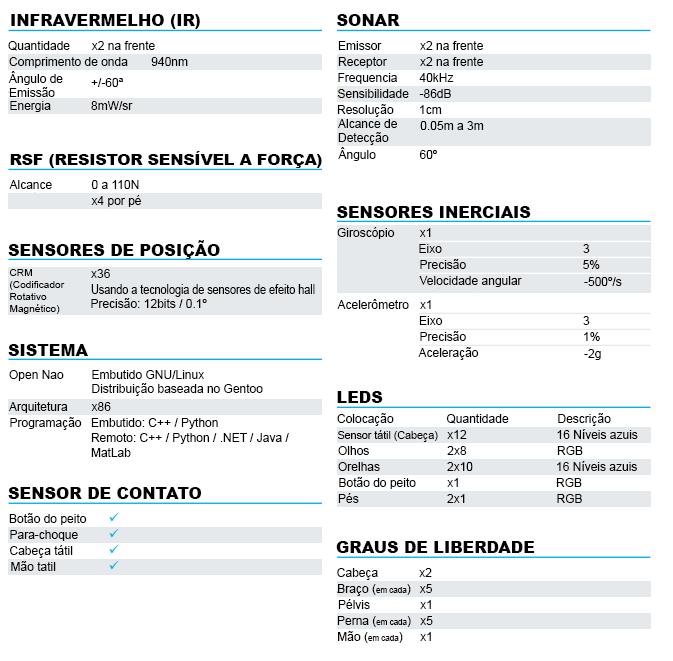
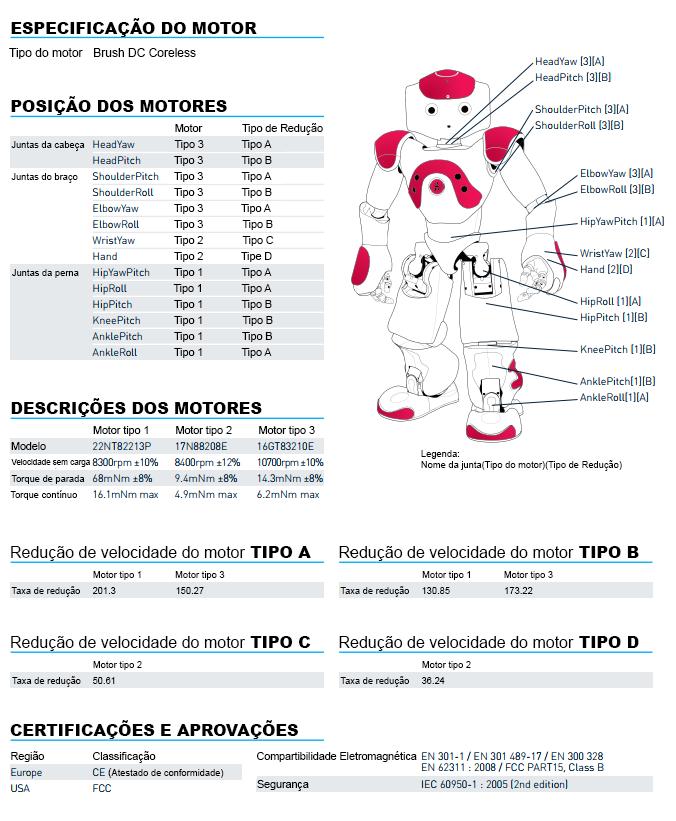
1 1 TDP do time RECIFE SOCCER Futebol SPL Gabriel Alves da Silva 1, Paulo Martins Monteiro 2, Pedro Ferreira da Silva Junior 3, Simone Gomes Zelaquett 4, Tasso Luís Oliveira de Moraes 5. Resumo Este artigo descreve o robô e as estratégias de jogo desenvolvida pela equipe RECIFE SOCCER da Prefeitura do Recife para a XVI Latin American Robotics Competition e XV Brazilian Robotics Competition, na categoria RoboCup Robotics Competition / RoboCup Soccer / RoboCup Humanoid and Standard Platform League (SPL). Apresenta-se primeiro uma descrição técnica do robô humanoide NAO. Posteriormente será abordada a estratégia de programação utilizada para o robô jogar futebol de acordo com as regras da SPL. N I. INTRODUÇÃO a RoboCup Humanoid and Standard Platform League, robôs autônomos com a aparência e comportamentos semelhantes aos humanos, jogam futebol uns contra os outros. Nas equipes desta categoria de competição, cinco robôs autônomos altamente dinâmicos jogam entre si, utilizando estratégias de caminhada dinâmica, corrida e chute da bola, mantendo o equilíbrio, a percepção visual da bola, outros jogadores e o campo; a auto localização e o jogo em equipe estão entre os muitos problemas de pesquisa investigados na RoboCup Humanoid and Standard Platform League. O robô utilizado nesta competição é o Humanoide NAO produzido pela Aldebaran Robotis e conta com movimentos com 25 graus de liberdade e uma forma humanoide que lhe permitem mover-se e adaptar-se ao mundo em torno dele. Seu sensor de inércia permite manter o equilíbrio e saber se ele está em pé ou deitado. Os vários sensores em sua cabeça, mãos e pés, bem como seus sonares, possibilita ao NAO perceber seu ambiente e se orientar. Seus 4 microfones direcionais e altofalantes, permite a interação com os seres humanos de uma forma completamente natural, por ouvir e falar. O NAO é equipado com duas câmeras que filmam seu ambiente de alta resolução, ajudando-o a reconhecer formas e objetos. Ele ainda pode se comunicar através das conexões WiFi e Ethernet. Com tudo isso o robô já é capaz de reproduzir o comportamento humano. Nesta categoria RoboCup Humanoid and Standard Platform League, o robô deverá jogar futebol como os humanos, utilizando seus recursos de hardware e programação em inteligência artificial. A programação do robô poderá ser feita utilizado um pacote de desenvolvimento desenvolvido e disponibilizado pela equipe da RoboCup Humanoid and Standard Platform League B- Human e Nao Devils. II. O TIME O time Recife SOCCER é formado por membros da Rede Municipal de Ensino da Cidade do Recife (professores, estudantes e monitores). Todos eles fazem parte do Programa Robótica na Escola, o qual existe desde Esse programa é dividido em três Linhas de Robótica, o qual os robôs avançados compõem a Linha 3. Nesta linha os robôs são adquiridos prontos e o foco é na estratégia de programação. Assim, temos robôs humanoides NAO e Drones DJI Phantom 3. III. O ROBÔ Os robôs utilizados pelo Recife SOCCER são o Humanoide NAO da SoftBank. Todos eles da versão 5. Segue a estrutura 1 Gabriel Alves da Silva, desenvolvedor, [email protected], (81) Paulo Martins Monteiro, desenvolvedor, [email protected], (81) Pedro Ferreira da Silva Junior, professor, [email protected], (81) Simone Gomes Zelaquett, professora, [email protected], (81) Tasso Luís Oliveira de Moraes, desenvolvedor, [email protected], (81)
2 2
3 3
4 4 IV. O SOFTWARE O código utilizado pela Recife SOCCER é baseado no código base, disponibilizado pelas equipes B-Human, e Nao Devils, ambas da Alemanha. V. PROCESSAMENTO DE IMAGEM O processamento de imagem em uso ainda utiliza as informações do campo codificado por cores, mas não precisa de uma calibração específica para obter uma boa taxa de detecção. Para conseguir isso, a cor do campo (verde) é recém calculada a cada quadro usando um histograma de cores ponderadas com base em amostras de pixels na imagem. A ideia-chave é usar o máximo de informações possível para remover a necessidade de tabelas de cores, reduzir o esforço de digitalização e minimizar os cálculos subsequentes necessários. Uma vez que o poder de CPU limitado não permite uma varredura de duas imagens inteiras, processamos apenas uma pequena fração de todos os pixels, digitalizando as imagens ao longo de linhas de varredura verticais e horizontais, essas linhas de varredura buscam mudanças dentro do canal Y para detectar as linhas brancas (se cercadas pela cor do campo) e também detectar possíveis locais de bola com base nas mudanças de canal de cores. Para reduzir o tempo de computação, a detecção de objetivos ocorre apenas na parte superior das imagens nas linhas de varreduras horizontal, também usando as informações sobre a detecção de borda de campo. VI. COMPORTAMENTO Utilizamos o C-based Agent Behavior Specification Language (CABSL) que foi desenvolvido pela equipe B- Human, e implementa XABSL como C++ - Macros que permitem o acesso fácil a todas as estruturas de dados (ou seja, representações) necessárias para a tomada de decisões. Para este fim, o comportamento é especificado por opções. A partir da opção raiz, as opções subsequentes são ativadas de forma semelhante a uma árvore de decisão até chegar a uma folha, ou seja, uma opção que representa uma habilidade básica como andar ou executar uma ação especial, que são parametrizadas pela opção de chamada. Cada opção contém uma máquina de estado para calcula a decisão de ativação com base em uma série de valores armazenados nas representações. Embora seja possível conceber um comportamento complexo usando CABSL, várias tarefas podem ser difíceis ou impossíveis de especificar usando apenas o CABSL. VII. A ESTRATÉGIA Para que sejam vencidos os desafios do futebol a equipe RECIFE SOCCER vem desenvolvendo estratégias de programação em quatro ações fundamentais para tornar possível a realização da partida. São as estratégias básicas para a simulação de uma partida de futebol, com regras semelhantes às do futebol de humanos, as quais descrevemos, brevemente, abaixo. Reconhecimento da bola estratégia onde o robô é programado para localizar a bola e se aproximar para executar a estratégia seguinte. Aqui são utilizados os recursos de visão do robô. Posicionamento para chute etapa posterior ao reconhecimento da bola, e precede as próximas duas estratégias, drible e chute a gol. Aqui o robô vai observar seu posicionamento em relação ao campo e aos adversários para tomada de decisão e definir qual a próxima estratégia. Drible estratégia que consiste no ajuste da posição do robô, verificada a partir da estratégia de posicionamento para chute. Aqui o robô chuta a bola tirando o adversário da jogada. Chute ao gol como na estratégia Drible, nessa estratégia o robô se ajusta, a partir da análise do seu posicionamento, para chutar a bola em direção ao gol. Aqui o chute é direto a barra do time adversário. Defesa estratégia em que o robô reconhece o seu posicionamento próximo a barra de defesa e impede o avanço da bola no gol. Goleiro o principal objetivo do goleiro é impedir que a bola entre no gol da sua equipe. Assim, o goleiro fica restrito dentro da área da grande área. Existem apenas duas situações em que o robô deixa o próprio objetivo. Ou quando o goleiro é retirado do campo ou quando caminhar para chutar a bola. VIII. CONCLUSÃO E TRABALHO FUTURO Neste artigo, foram apresentadas a uma breve descrição da arquitetura dos robôs e estratégias elaboradas pela equipe RECIFE SOCCER para participar do futebol de humanoides na Competição Brasileira de Robótica 2016 categoria RoboCup Humanoid and Standard Platform League. O êxito na execução dos comportamentos programados está ligado às estratégias da inteligência artificial dos robôs. O principal objetivo deste trabalho foi desenvolver as estratégias utilizadas em um jogo de futebol humano, aliadas aos recursos de inteligência artificial do robô humanoide NAO. Nosso trabalho futuro é a integração com o SPQR Ball Perceptor um módulo de software para detecção de bola em preto e branco desenvolvido pela equipe SPQR baseado em uma abordagem supervisionada no Opencv. REFERÊNCIAS [1] Especificações Técnicas do NAO v5, disponível em B_NAO_Evolution_Datasheet.pdf?t= último acesso em 28/06/2017 às 11h34. [2] Z-Knipsers Team Description Paper for RoboCup 2016 disponível em Papers/StandardPlatform/RoboCup_2016_SPL_TDP_Z-Knipsers.pdf - último acesso em 15/06/2016 às 10:00h.
5 5 [3] TDP da Equipe UaiSoccer de Futebol de Robôs/UFSJ: Informações sobre o Sistema de Software e Estratégias Utilizados na Categoria Small-Size-F180 disponível em último acesso em 28/06/2017 às 11h41. [4] TDP EQUIPE DE FUTEBOL DE ROBÔS Z-TRONICS F-180 disponível em último acesso em 28/06/2017 às 11h43. [5] EDROM Humanoide Kid Size/Teen Size disponível em pdf - último acesso em 28/06/2017 às 11h45. [6] Código base B-Human: acesso em 28/06/2017 às 11h28. [7] Código base Nao Devils: acesso em 28/06/2017 às 11h30. [8] SPL Código base disponível em último acesso em 03/08/2017 às 01h25.
Desenvolvimento de Estratégia para Programação do Futebol de Robôs
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 0 de julho de 006 Campo Grande, MS Desenvolvimento de Estratégia para Programação do Futebol de Robôs Wânderson O. Assis,
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 0 de julho de 006 Campo Grande, MS Desenvolvimento de Estratégia para Programação do Futebol de Robôs Wânderson O. Assis,
Inteligência Artificial Aplicada a Robôs Reais
 Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP Cópias das Transparências: http://www.icmc.usp.br/~simoes/seminars/semi.html
Sistema de Reconhecimento de Robôs da categoria Small Size de Futebol de Robôs da FEI RoboFEI
 Projeto de iniciação científica Sistema de Reconhecimento de Robôs da categoria Small Size de Futebol de Robôs da FEI RoboFEI Orientador: Flavio Tonidandel Departamento: Ciência da Computação Candidato:
Projeto de iniciação científica Sistema de Reconhecimento de Robôs da categoria Small Size de Futebol de Robôs da FEI RoboFEI Orientador: Flavio Tonidandel Departamento: Ciência da Computação Candidato:
Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus)
") Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
Simulação de Futebol de Robôs
 Departamento de Engenharia Elétrica Simulação de Futebol de Robôs Aluna: Bianca Burgos Maron Orientadora: Marley Vellasco Introdução A inteligência computacional e suas aplicações em robôs inteligentes
Departamento de Engenharia Elétrica Simulação de Futebol de Robôs Aluna: Bianca Burgos Maron Orientadora: Marley Vellasco Introdução A inteligência computacional e suas aplicações em robôs inteligentes
GarrinchaBot: Uma proposta de robô para Robocup Small size League
 Anais do 15 O Encontro de Iniciação Científica e Pós-Graduação do ITA XV ENCITA / 2009 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 19 a 22 2009. GarrinchaBot: Uma proposta
Anais do 15 O Encontro de Iniciação Científica e Pós-Graduação do ITA XV ENCITA / 2009 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 19 a 22 2009. GarrinchaBot: Uma proposta
Inteligência Artificial Aplicada a Robôs Reais
 Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP http://www.icmc.usp.br/~simoes/seminars/semi.html email: [email protected]
Inteligência Artificial Aplicada a Robôs Reais Prof. Dr. Eduardo Simões Instituto de Ciências Matemáticas e de Computação USP http://www.icmc.usp.br/~simoes/seminars/semi.html email: [email protected]
Robótica 2002/2003 Introdução à Robótica. Estrutura da Apresentação
 Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis [email protected] http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Robótica 2002/2003 Introdução à Robótica Luís Paulo Reis [email protected] http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia da Universidade
Viabilizando projetos. Jorge Augusto Lopes Gonçalves
 Viabilizando projetos Jorge Augusto Lopes Gonçalves Eu: Aluno de engenharia de computação - UFG. Entusiasta em vários projetos ligados a área de tecnologia e educação. Participação em torneios de robótica,
Viabilizando projetos Jorge Augusto Lopes Gonçalves Eu: Aluno de engenharia de computação - UFG. Entusiasta em vários projetos ligados a área de tecnologia e educação. Participação em torneios de robótica,
Inteligência Artificial Agentes Inteligentes
 Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação [email protected] Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Inteligência Artificial Jarley P. Nóbrega, Dr. Faculdade Nova Roma Bacharelado em Ciência da Computação [email protected] Semestre 2018.2 Jarley P. Nóbrega, Dr. (Nova Roma) Inteligência Artificial Semestre
Desenvolvimento de um time de futebol robótico para o RoboCup 2D
 Desenvolvimento de um time de futebol robótico para o RoboCup 2D Rodrigo Mendes Garcês 1,Jamesson Amaral Gomes 1, Geraldo Braz Júnior 1, Alexandre César Muniz de Oliveira 1, Luciano Reis Coutinho 1, Paulo
Desenvolvimento de um time de futebol robótico para o RoboCup 2D Rodrigo Mendes Garcês 1,Jamesson Amaral Gomes 1, Geraldo Braz Júnior 1, Alexandre César Muniz de Oliveira 1, Luciano Reis Coutinho 1, Paulo
Implementação de um Time para a categoria RoboCup Soccer Simulation 3D
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Implementação de um Time para a categoria RoboCup Soccer Simulation 3D Luiz Antonio
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Implementação de um Time para a categoria RoboCup Soccer Simulation 3D Luiz Antonio
VISÃO DIGITAL, OS OLHOS DO FUTURO
 VISÃO DIGITAL, OS OLHOS DO FUTURO Eduardo Marcelo Nicastro Carvalho*, Luana Fonseca Guimarães*, Priscila Amâncio da Silva*, Maurício Neves Asenjo** * Acadêmicos da Faculdade de Ciências e de Tecnologia
VISÃO DIGITAL, OS OLHOS DO FUTURO Eduardo Marcelo Nicastro Carvalho*, Luana Fonseca Guimarães*, Priscila Amâncio da Silva*, Maurício Neves Asenjo** * Acadêmicos da Faculdade de Ciências e de Tecnologia
Framework para o Desenvolvimento de Agentes para a Robocup: o Módulo de Definição de Áreas de Atuação
 Framework para o Desenvolvimento de para a Robocup: o Módulo de Definição de Áreas de Atuação Andre Zanki Cordenonsi, Alisson Moscato Loy, Guilherme Dhein, Leone Francisco Petry Cesca Centro Universitário
Framework para o Desenvolvimento de para a Robocup: o Módulo de Definição de Áreas de Atuação Andre Zanki Cordenonsi, Alisson Moscato Loy, Guilherme Dhein, Leone Francisco Petry Cesca Centro Universitário
RobotBulls Robotics Team Description 2015 (2D)
") RobotBulls Robotics Team Description 2015 (2D) Alexandre Baratella Lugli, Haroldo Manoel Dornelas, Leonardo de Oliveira Saldanha e Wanderson Eleutério Saldanha. Av. João de Camargo, 510, Santa Rita do
RobotBulls Robotics Team Description 2015 (2D) Alexandre Baratella Lugli, Haroldo Manoel Dornelas, Leonardo de Oliveira Saldanha e Wanderson Eleutério Saldanha. Av. João de Camargo, 510, Santa Rita do
LEVANTAMENTO DE ESTRATÉGIAS DE GRANDES EQUIPES DA CATEGORIA SMALL-SIZE
 LEVANTAMENTO DE ESTRATÉGIAS DE GRANDES EQUIPES DA CATEGORIA SMALL-SIZE Autor: Denis de Castro Pereira Supervisão: André Luiz Carvalho Ottoni Departamento de Software Equipe UaiSoccer Robot Team Universidade
LEVANTAMENTO DE ESTRATÉGIAS DE GRANDES EQUIPES DA CATEGORIA SMALL-SIZE Autor: Denis de Castro Pereira Supervisão: André Luiz Carvalho Ottoni Departamento de Software Equipe UaiSoccer Robot Team Universidade
SIMULADOR DE UMA PARTIDA DE FUTEBOL COM ROBÔS VIRTUAIS
 SIMULADOR DE UMA PARTIDA DE FUTEBOL COM ROBÔS VIRTUAIS Fábio Schülter Orientador: Prof. José Roque Voltolini da Silva Roteiro da Apresentação Introdução - Objetivos do trabalho Revisão bibliográfica Desenvolvimento
SIMULADOR DE UMA PARTIDA DE FUTEBOL COM ROBÔS VIRTUAIS Fábio Schülter Orientador: Prof. José Roque Voltolini da Silva Roteiro da Apresentação Introdução - Objetivos do trabalho Revisão bibliográfica Desenvolvimento
Computação Gráfica. Trabalho 1
 Computação Gráfica Trabalho 1 Futebol de Robô em PostScript Tobias Colombo Este trabalho está dividido em 5 módulos: bancodados.ps > Define as estruturas de dados que definem os times e seus jogadores,
Computação Gráfica Trabalho 1 Futebol de Robô em PostScript Tobias Colombo Este trabalho está dividido em 5 módulos: bancodados.ps > Define as estruturas de dados que definem os times e seus jogadores,
Inteligência Artificial
 Fonte: José Francisco Salm Junior (Diretor de Engenharia de Sistemas Instituto Stela) Universidade Federal de Campina Grande Departamento de Sistemas e Computação Curso de Pós-Graduação em Ciência da Computação
Fonte: José Francisco Salm Junior (Diretor de Engenharia de Sistemas Instituto Stela) Universidade Federal de Campina Grande Departamento de Sistemas e Computação Curso de Pós-Graduação em Ciência da Computação
Aprendizagem de Máquina. Prof. Júlio Cesar Nievola PPGIA - PUCPR
 Aprendizagem de Máquina Prof. Júlio Cesar Nievola PPGIA - PUCPR Introdução Justificativa Recente progresso em algoritmos e teoria Disponibilidade crescente de dados online Poder computacional disponível
Aprendizagem de Máquina Prof. Júlio Cesar Nievola PPGIA - PUCPR Introdução Justificativa Recente progresso em algoritmos e teoria Disponibilidade crescente de dados online Poder computacional disponível
DESENVOLVIMENTO DE ROBÔ MÓVEL RADIOCONTROLADO
 Anais do 13 O Encontro de Iniciação Científica e Pós-Graduação do ITA XIII ENCITA / 2007 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 01 a 04 2007. DESENVOLVIMENTO DE ROBÔ
Anais do 13 O Encontro de Iniciação Científica e Pós-Graduação do ITA XIII ENCITA / 2007 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 01 a 04 2007. DESENVOLVIMENTO DE ROBÔ
PROPOSTA DE ARQUITETURA DE ROBO PARA AMBIENTE DE COMPETIÇÃO
 PROPOSTA DE ARQUITETURA DE ROBO PARA AMBIENTE DE COMPETIÇÃO Winter Carlos Silva Onofre, Danilo Pereira Neves, Guilherme Henrique Guerra, Renato Ferreira Fernandes Júnior, Aniel Silva de Morais [email protected],
PROPOSTA DE ARQUITETURA DE ROBO PARA AMBIENTE DE COMPETIÇÃO Winter Carlos Silva Onofre, Danilo Pereira Neves, Guilherme Henrique Guerra, Renato Ferreira Fernandes Júnior, Aniel Silva de Morais [email protected],
LEGO Mindstorm e suas aplicações
 Palestrante: Bruno César Prado Email: [email protected] Professores: Prof. Maria das Graças Bruno Marietto Prof. Wagner Tanaka Botelho CMCC Centro de Matemática, Computação e Cognição http://www.youtube.com/watch?v=5xva2lfds18
Palestrante: Bruno César Prado Email: [email protected] Professores: Prof. Maria das Graças Bruno Marietto Prof. Wagner Tanaka Botelho CMCC Centro de Matemática, Computação e Cognição http://www.youtube.com/watch?v=5xva2lfds18
Concursos Micro-Rato. Ciber-Rato
 Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação
Concursos Micro-Rato e Ciber-Rato Luis Almeida, José Luis Azevedo, Bernardo Cunha, Pedro Fonseca, Nuno Lau, Artur Pereira, Andreia Melo Universidade de Aveiro Próxima edição: 11 de Maio de 2005 Motivação
INTELIGÊNCIA ARTIFICIAL
 Agentes Inteligentes Aula 3 Mestrado em Educação (em andamento) MBA em Negócios em Mídias Digitais MBA em Marketing e Vendas Especialista em games : Produção e Programação Bacharel em Sistema de Informação
Agentes Inteligentes Aula 3 Mestrado em Educação (em andamento) MBA em Negócios em Mídias Digitais MBA em Marketing e Vendas Especialista em games : Produção e Programação Bacharel em Sistema de Informação
PROJETO DO TIME DE FUTEBOL DE ROBÔS IFRN IEEE VERY SMALL SIZE. Robot Soccer Very Small Size
 PROJETO DO TIME DE FUTEBOL DE ROBÔS IFRN IEEE VERY SMALL SIZE L. M. T. Rodrigues, I. K. D. Gomes, M. H. S. Cardoso, G. S. Santiago, M. V. Araujo, J. P. F. Guimarães, F. B. Gondim, P. J. Alsina, F. O. Quintaes,
PROJETO DO TIME DE FUTEBOL DE ROBÔS IFRN IEEE VERY SMALL SIZE L. M. T. Rodrigues, I. K. D. Gomes, M. H. S. Cardoso, G. S. Santiago, M. V. Araujo, J. P. F. Guimarães, F. B. Gondim, P. J. Alsina, F. O. Quintaes,
Prof. Maick da Silveira Viana
 Regras do Handebol Prof. Maick da Silveira Viana REGRA 1 A quadra do jogo REGRA 2 - A duração da partida A partida de handebol consiste em dois tempos divididos por um intervalo de 10 minutos. A duração
Regras do Handebol Prof. Maick da Silveira Viana REGRA 1 A quadra do jogo REGRA 2 - A duração da partida A partida de handebol consiste em dois tempos divididos por um intervalo de 10 minutos. A duração
Transformação de Imagens Digitais em Código CNC Aprimoradas com Redes Neurais Artificiais
 Transformação de Imagens Digitais em Código CNC Aprimoradas com Redes Neurais Artificiais Abstract. Jader Teixeira 1, Alex Vinícios Telocken 1 1 Universidade de Cruz Alta (UNICRUZ) [email protected],
Transformação de Imagens Digitais em Código CNC Aprimoradas com Redes Neurais Artificiais Abstract. Jader Teixeira 1, Alex Vinícios Telocken 1 1 Universidade de Cruz Alta (UNICRUZ) [email protected],
Placa Eletrônica para Robôs Móveis
 Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
Colégio Adventista de Rio Preto. Futsal. 9º ano. Prof. Daniel Prandi. Prof. Sheila Molina
 Colégio Adventista de Rio Preto Futsal 9º ano Prof. Daniel Prandi Prof. Sheila Molina FUTEBOL DE SALÃO - FUTSAL Caracterização: É um jogo coletivo desportivo, entre duas equipes, sendo cada uma constituída
Colégio Adventista de Rio Preto Futsal 9º ano Prof. Daniel Prandi Prof. Sheila Molina FUTEBOL DE SALÃO - FUTSAL Caracterização: É um jogo coletivo desportivo, entre duas equipes, sendo cada uma constituída
MONITORAMENTO E ANÁLISE DE MÁQUINAS E COMPONENTES
 MONITORAMENTO E ANÁLISE DE MÁQUINAS E COMPONENTES MONITORAMENTO DE VIBRAÇÃO E DIAGNÓSTICO COMUNICAÇÃO Visualização (TCP/IP) Detecção de anomalias como: Danos em rolamentos no spindle Desgaste ou defeitos
MONITORAMENTO E ANÁLISE DE MÁQUINAS E COMPONENTES MONITORAMENTO DE VIBRAÇÃO E DIAGNÓSTICO COMUNICAÇÃO Visualização (TCP/IP) Detecção de anomalias como: Danos em rolamentos no spindle Desgaste ou defeitos
Visão computacional. Juliana Patrícia Detroz Orientador: André Tavares Silva
 Visão computacional Juliana Patrícia Detroz Orientador: André Tavares Silva Visão computacional Tentativa de replicar a habilidade humana da visão através da percepção e entendimento de uma imagem; Fazer
Visão computacional Juliana Patrícia Detroz Orientador: André Tavares Silva Visão computacional Tentativa de replicar a habilidade humana da visão através da percepção e entendimento de uma imagem; Fazer
APOSTILA METODOLOGIA
 APOSTILA METODOLOGIA APOSTILA PÁGINA 1 NOSSO OBJETIVO Ensinar jovens a aprimorar seus talentos, a entender a parte tática do jogo e aprimorar tanto o lado físico quanto mental. Semear os valores nobres
APOSTILA METODOLOGIA APOSTILA PÁGINA 1 NOSSO OBJETIVO Ensinar jovens a aprimorar seus talentos, a entender a parte tática do jogo e aprimorar tanto o lado físico quanto mental. Semear os valores nobres
Inteligência Artificial. Prof. Ilaim Costa Jr.
 Inteligência Artificial Prof. Ilaim Costa Jr. 4) Ciência da Computação 4) Ciência da Computação Exemplos de Aplicação da IA Matemática: demonstração
Inteligência Artificial Prof. Ilaim Costa Jr. 4) Ciência da Computação 4) Ciência da Computação Exemplos de Aplicação da IA Matemática: demonstração
CLIPAGEM IMPRESSO. Cliente: CURSO DE ROBÓTICA COLÉGIO SANTA EMÍLIA
 A equipe Positronics, formada por alunos do Colégio Santa Emília, em Olinda, volta para casa esta quarta (3), depois de participar da Robocup competição de robôs e inteligência artificial sediada em Eindhoven,
A equipe Positronics, formada por alunos do Colégio Santa Emília, em Olinda, volta para casa esta quarta (3), depois de participar da Robocup competição de robôs e inteligência artificial sediada em Eindhoven,
ROBÓTICA PROGRAMAÇÃO DE ROBÔS
 ROBÓTICA PROGRAMAÇÃO DE ROBÔS Tipos de programação de robôs Programação a nível das juntas no qual as ações básicas são posições (e possivelmente movimentos) Programação a nível do robô no qual as ações
ROBÓTICA PROGRAMAÇÃO DE ROBÔS Tipos de programação de robôs Programação a nível das juntas no qual as ações básicas são posições (e possivelmente movimentos) Programação a nível do robô no qual as ações
Recomendação de políticas Privacidade Pessoal
 Recomendação de políticas Privacidade A oportunidade Devido à crescente digitalização de nossas vidas, um número muito maior de dados pessoais está sendo gerado e coletado. Esses dados podem ser usados
Recomendação de políticas Privacidade A oportunidade Devido à crescente digitalização de nossas vidas, um número muito maior de dados pessoais está sendo gerado e coletado. Esses dados podem ser usados
Computaçã. Visão Geral. Sistema Gráfico. Computação Gráfica. Pixels. Sistema Gráfico e o Frame Buffer. Introdução à Computação Gráfica
 Visão Geral Computaçã ção o Gráfica Introduçã ção, conceitos básicosb sicos, áreas relacionadas Introdução à Computação Gráfica Como funciona um sistema gráfico Como imagens são representadas Áreas relacionadas,
Visão Geral Computaçã ção o Gráfica Introduçã ção, conceitos básicosb sicos, áreas relacionadas Introdução à Computação Gráfica Como funciona um sistema gráfico Como imagens são representadas Áreas relacionadas,
Manual do Bovo. Aron Bostrom Eugene Trounev Tradução: Luiz Fernando Ranghetti BOVO N 5
 Aron Bostrom Eugene Trounev Tradução: Luiz Fernando Ranghetti BOVO N 5 2 Conteúdo 1 Introdução 5 2 Como jogar 6 3 Regras do jogo, estratégias e dicas 7 3.1 Regras do jogo........................................
Aron Bostrom Eugene Trounev Tradução: Luiz Fernando Ranghetti BOVO N 5 2 Conteúdo 1 Introdução 5 2 Como jogar 6 3 Regras do jogo, estratégias e dicas 7 3.1 Regras do jogo........................................
1ª Colocação 10 pontos. 2ª Colocação 08 pontos. 3ª Colocação 06 pontos
 Regras: Jogo do Xadrez 1. Sorteio: Os confrontos serão definido através de sorteio e relacionados no chaveamento da competição; A ordem de disputa será de acordo com a ordem de retira no sorteio. PS: 2
Regras: Jogo do Xadrez 1. Sorteio: Os confrontos serão definido através de sorteio e relacionados no chaveamento da competição; A ordem de disputa será de acordo com a ordem de retira no sorteio. PS: 2
Robô Móvel Colaborativo
 Lançamento Modernize seu processo produtivo Robô Móvel Colaborativo O Robô Móvel Colaborativo da Omron é um Veículo Autônomo Inteligente (AIV) projetado para aumentar a produtividade em processos industriais
Lançamento Modernize seu processo produtivo Robô Móvel Colaborativo O Robô Móvel Colaborativo da Omron é um Veículo Autônomo Inteligente (AIV) projetado para aumentar a produtividade em processos industriais
FLAGBOL. Profº Paulo Fernando Mesquita Junior
 FLAGBOL Profº Paulo Fernando Mesquita Junior Nascido a partir de uma variação mais suave do futebol americano, o Flagbol começou a desenvolver-se como modalidade esportiva no início dos anos 40, em bases
FLAGBOL Profº Paulo Fernando Mesquita Junior Nascido a partir de uma variação mais suave do futebol americano, o Flagbol começou a desenvolver-se como modalidade esportiva no início dos anos 40, em bases
Construção de Robôs Jogadores de Futebol
 Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Construção de Robôs Jogadores de Futebol Wânderson O. Assis, Alessandra D. Coelho, Marcelo
Anais do XXVI Congresso da SBC EnRI l III Encontro de Robótica Inteligente 14 a 20 de julho de 2006 Campo Grande, MS Construção de Robôs Jogadores de Futebol Wânderson O. Assis, Alessandra D. Coelho, Marcelo
Colégio Adventista de Rio Preto. Prof. Daniel Prandi Prof. Sheila Molina
 Colégio Adventista de Rio Preto Prof. Daniel Prandi Prof. Sheila Molina Futebol de Salão - Futsal Caracterização: É um jogo coletivo desportivo, entre duas equipes, sendo cada uma constituída por doze
Colégio Adventista de Rio Preto Prof. Daniel Prandi Prof. Sheila Molina Futebol de Salão - Futsal Caracterização: É um jogo coletivo desportivo, entre duas equipes, sendo cada uma constituída por doze
Agentes Inteligentes. Módulo 02 27/02/2013. Inteligência Artificial. Profª Hemilis Joyse
 Agentes Inteligentes Módulo 02 1 Agente É tudo que pode ser considerado capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por intermédio de atuadores. 2 Agente Tabela parcial
Agentes Inteligentes Módulo 02 1 Agente É tudo que pode ser considerado capaz de perceber seu ambiente por meio de sensores e de agir sobre esse ambiente por intermédio de atuadores. 2 Agente Tabela parcial
Quem somos? História. Mais informações acessem:
 Quem somos? História A equipe de Robótica Asimov é uma equipe brasileira de robótica educacional formada por estudantes do Instituto Federal do Espírito Santo Ifes Campus Colatina. Ela foi fundada no inicio
Quem somos? História A equipe de Robótica Asimov é uma equipe brasileira de robótica educacional formada por estudantes do Instituto Federal do Espírito Santo Ifes Campus Colatina. Ela foi fundada no inicio
POSITRONICS SOCCER: CONSTRUÇÃO E DESENVOLVIMENTO DE ROBÔS DE FUTEBOL UTILIZANDO O NXT MINDSTORMS
 POSITRONICS SOCCER: CONSTRUÇÃO E DESENVOLVIMENTO DE ROBÔS DE FUTEBOL UTILIZANDO O NXT MINDSTORMS MENDONÇA, Hugo Serrano Leite de 1 ; CAMPOS, Victor de Oliveira 1 ; COUTINHO, Yuri Batista Almeida 2 ; PONTES,
POSITRONICS SOCCER: CONSTRUÇÃO E DESENVOLVIMENTO DE ROBÔS DE FUTEBOL UTILIZANDO O NXT MINDSTORMS MENDONÇA, Hugo Serrano Leite de 1 ; CAMPOS, Victor de Oliveira 1 ; COUTINHO, Yuri Batista Almeida 2 ; PONTES,
Alternativas táticas para ser vantajoso na subfase de finalização do jogo.
 Alternativas táticas para ser vantajoso na subfase de finalização do jogo. Pra quem não sabe para onde vai. Qualquer caminho serve Ao acompanhar as equipes da série A do Campeonato Brasileiro de 2018,
Alternativas táticas para ser vantajoso na subfase de finalização do jogo. Pra quem não sabe para onde vai. Qualquer caminho serve Ao acompanhar as equipes da série A do Campeonato Brasileiro de 2018,
Evolução Tática do Futebol. Prof. Esp. Sandro de Souza
 Evolução Tática do Futebol Prof. Esp. Sandro de Souza O Campo Comprimento: 90 min e 120 máx Largura: 45 min 90 máx Os Jogadores Posicionados de acordo com a região do campo DEFESA MEIO-CAMPO ATAQUE ZAGUEIROS
Evolução Tática do Futebol Prof. Esp. Sandro de Souza O Campo Comprimento: 90 min e 120 máx Largura: 45 min 90 máx Os Jogadores Posicionados de acordo com a região do campo DEFESA MEIO-CAMPO ATAQUE ZAGUEIROS
9 ANO APOSTILA DE EDUCAÇÃO FÍSICA
 9 ANO APOSTILA DE EDUCAÇÃO FÍSICA FABRÍCIO RAMALHO DA COSTA GERSON APARECIDO DE SOUZA JUNIOR ISMAEL FRANCO DE SOUZA MARCOS PAULO DA SILVA COSTA RUBENS VAZ COLÉGIO DA POLÍCIA MILITAR DE GOIÁS POLIVALENTE
9 ANO APOSTILA DE EDUCAÇÃO FÍSICA FABRÍCIO RAMALHO DA COSTA GERSON APARECIDO DE SOUZA JUNIOR ISMAEL FRANCO DE SOUZA MARCOS PAULO DA SILVA COSTA RUBENS VAZ COLÉGIO DA POLÍCIA MILITAR DE GOIÁS POLIVALENTE
MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO PIAUÍ - IFPI CAMPUS FLORIANO
 MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO PIAUÍ - IFPI CAMPUS FLORIANO EDITAL Nº 003/2016, DE 14 DE JANEIRO DE 2016 Seleção para Alunos de Pós-Graduação Lato Sensu para
MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO PIAUÍ - IFPI CAMPUS FLORIANO EDITAL Nº 003/2016, DE 14 DE JANEIRO DE 2016 Seleção para Alunos de Pós-Graduação Lato Sensu para
PROJECTOS EM DESENVOLVIMENTO?
 PROJECTOS EM DESENVOLVIMENTO? 5DPO FUTEBOL ROBÓTICO FAST VELEIRO AUTÓNOMO 1 Projectos de investigação que estão em desenvolvimento no DEEC O GRUPO ELE325 PROJECTO FEUP Hugo José Magalhães Costa Inês Alexandra
PROJECTOS EM DESENVOLVIMENTO? 5DPO FUTEBOL ROBÓTICO FAST VELEIRO AUTÓNOMO 1 Projectos de investigação que estão em desenvolvimento no DEEC O GRUPO ELE325 PROJECTO FEUP Hugo José Magalhães Costa Inês Alexandra
ATIVIDADES PRÁTICAS SUPERVISIONADAS
 ATIVIDADES PRÁTICAS SUPERVISIONADAS 7ª Série Linguagens Formais e Autômatos Ciência da Computação A atividade prática supervisionada (ATPS) é um método de ensino-aprendizagem desenvolvido por meio de um
ATIVIDADES PRÁTICAS SUPERVISIONADAS 7ª Série Linguagens Formais e Autômatos Ciência da Computação A atividade prática supervisionada (ATPS) é um método de ensino-aprendizagem desenvolvido por meio de um
Frederico Miguel Santos
 Frederico Miguel Santos DEE ISEC DETI/IEETA - UA Sumário 1. RoboCup 1. descrição / objectivos 2. MSL - futebol,,porquê? 2. CAMBADA 1. descrição / objectivos 2. evolução 3. hardware 4. software: coordenação
Frederico Miguel Santos DEE ISEC DETI/IEETA - UA Sumário 1. RoboCup 1. descrição / objectivos 2. MSL - futebol,,porquê? 2. CAMBADA 1. descrição / objectivos 2. evolução 3. hardware 4. software: coordenação
Estrutura da Apresentação
 Construção de Equipas para a Sony Legged League do RoboCup Luís Paulo Reis [email protected] http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia
Construção de Equipas para a Sony Legged League do RoboCup Luís Paulo Reis [email protected] http://www.fe.up.pt/~lpreis LIACC Lab.. Inteligência Artificial e Ciência de Computadores FEUP Faculdade de Engenharia
ESTRATÉGIAS DE NAVEGAÇÃO COOPERATIVA APLICADAS AO FUTEBOL DE ROBÔS AUTÔNOMOS DA EQUIPE BDP/UFV
 ESTRATÉGIAS DE NAVEGAÇÃO COOPERATIVA APLICADAS AO FUTEBOL DE ROBÔS AUTÔNOMOS DA EQUIPE BDP/UFV Alexandre Santos Brandão [email protected] Rafael Rosado Cruz [email protected] Talles Barbosa Portilho
ESTRATÉGIAS DE NAVEGAÇÃO COOPERATIVA APLICADAS AO FUTEBOL DE ROBÔS AUTÔNOMOS DA EQUIPE BDP/UFV Alexandre Santos Brandão [email protected] Rafael Rosado Cruz [email protected] Talles Barbosa Portilho
Reconhecimento facial. uma aplicação prática do reconhecimento de padrões
 Reconhecimento facial uma aplicação prática do reconhecimento de padrões Márcio Koch, junho 2014 Pauta Apresentação Visão computacional Reconhecimento de padrões Analise de Componentes Principais Reconhecimento
Reconhecimento facial uma aplicação prática do reconhecimento de padrões Márcio Koch, junho 2014 Pauta Apresentação Visão computacional Reconhecimento de padrões Analise de Componentes Principais Reconhecimento
Inteligência Artificial
 Inteligência Artificial Aula 01 - Introdução Tiago Alves de Oliveira 1 O que é Inteligência Artificial? Tiago Alves de Oliveira 2 O que é Inteligência Artificial? Área de pesquisa que tem como objetivo
Inteligência Artificial Aula 01 - Introdução Tiago Alves de Oliveira 1 O que é Inteligência Artificial? Tiago Alves de Oliveira 2 O que é Inteligência Artificial? Área de pesquisa que tem como objetivo
PROJETO CLUBE DE MATEMÁTICA
 CLUBE DE MATEMÁTICA "O jogo é um tipo de atividade que alia raciocínio, estratégia e reflexão com desafio e competição de uma forma lúdica muito rica." EB1/PE da Vargem Ano letivo 2016/2017 Índice PROJETO
CLUBE DE MATEMÁTICA "O jogo é um tipo de atividade que alia raciocínio, estratégia e reflexão com desafio e competição de uma forma lúdica muito rica." EB1/PE da Vargem Ano letivo 2016/2017 Índice PROJETO
Organização e Arquitetura de Computadores I
 Organização e Arquitetura de Computadores I Entrada e Saída Slide 1 Entrada e Saída Dispositivos Externos E/S Programada Organização e Arquitetura de Computadores I Sumário E/S Dirigida por Interrupção
Organização e Arquitetura de Computadores I Entrada e Saída Slide 1 Entrada e Saída Dispositivos Externos E/S Programada Organização e Arquitetura de Computadores I Sumário E/S Dirigida por Interrupção
ALUNO (A): Nº. 2- Quantos jogadores de handebol ficam na reserva? A. 5jogadores. B. 6jogadores. C. 7jogadores. D. 8jogadores. E. 9jogadores.
: Nº. 2- Quantos jogadores de handebol ficam na reserva? A. 5jogadores. B. 6jogadores. C. 7jogadores. D. 8jogadores. E. 9jogadores.") SECRETARIA DE SEGURANÇA PÚBLICA/SECRETARIA DE EDUCAÇÃO POLÍCIA MILITAR DO ESTADO DE GOIÁS COMANDO DE ENSINO POLICIAL MILITAR COLÉGIO DA POLÍCIA MILITAR NADER ALVES DOS SANTOS SÉRIE/ANO: 6º A, B, C DISCIPLINA:
SECRETARIA DE SEGURANÇA PÚBLICA/SECRETARIA DE EDUCAÇÃO POLÍCIA MILITAR DO ESTADO DE GOIÁS COMANDO DE ENSINO POLICIAL MILITAR COLÉGIO DA POLÍCIA MILITAR NADER ALVES DOS SANTOS SÉRIE/ANO: 6º A, B, C DISCIPLINA:
Time de Futebol de Robôs Y04 do Centro Universitário da FEI
 Time de Futebol de Robôs Y04 do Centro Universitário da FEI Eder A. Penharbel, Murilo F. Martins, Alexandre Fazolin, José Angelo Gurzoni Jr, Helbert Eduardo, Thiago Debia, Valquiria F. Pereira, Ricardo
Time de Futebol de Robôs Y04 do Centro Universitário da FEI Eder A. Penharbel, Murilo F. Martins, Alexandre Fazolin, José Angelo Gurzoni Jr, Helbert Eduardo, Thiago Debia, Valquiria F. Pereira, Ricardo