Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia
|
|
|
- Camila Henriques Schmidt
- 5 Há anos
- Visualizações:
Transcrição
1 Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia Aluno: Gabriel Malizia Orientador: Professor Marcelo Gattass Co-Orientador: Professor Paulo Cezar Carvalho
2 Roteiro Introdução. Métodos de codificação de luz estruturada. Sistema estudado. 1. Calibração de câmeras e padrões de calibração. 2. Captura e processamento de imagens. 3. Triangulação e modelo final. Implementação: demonstração. Resultados obtidos. Testes realizados. Conclusões e trabalhos futuros.
3 Introdução Estudo dos métodos estéreos ativos para captura de formas. Voltado para aplicações em engenharia. Precisão nas medidas e robustez na captura de diferentes objetos. Câmeras e projetores acessíveis. Motivação inicial: Visão Computacional.
4 Classificação dos Métodos de Aquisição de Formas Classificação dos métodos de aquisição de formas. Diferentes métodos para diferentes propósitos.


5 Princípio Básico de Métodos Estéreos Ativos: Triangulação Mesmo princípio da visão estéreo. Câmeras calibradas.

6 Princípio Básico de Métodos Estéreos Ativos Dificuldade na correspondência automática entre pontos das duas imagens.

7 Princípio Básico de Métodos Estéreos Ativos Solução: utilizar uma fonte de luz para marcar a cena com padrões conhecidos.

8 Princípio Básico de Métodos Estéreos Ativos Projetor digital como fonte de luz estruturada. Padrões com vários elementos. Cada elemento deve ser codificado univocamente.

9 Métodos de Codificação de Luz Estruturada: Codificação Temporal Projeta seqüencialmente slides com os dígitos do número binário das listras enumeradas. n slides para 2 n listras. Dois níveis de iluminação. Cenas estáticas. Codifica um eixo. [23] Posdamer

10 Métodos de Codificação de Luz Estruturada: Codificação Temporal Codificação de Gray: codificação mais robusta. Fronteiras não são repetidas. Em [10] foram utilizados três canais de cores. 3x menos slides para mesmo número de listras codificadas. [22]Inokuchi



11 Métodos de Codificação de Luz Estruturada: Codificação Espacial Único slide. Vizinhança utilizada para codificar posição. Necessidade de manter a estrutura espacial. [32] Griffin

12 Métodos de Codificação de Luz Estruturada: Codificação Espacial

13 Métodos de Codificação de Luz Estruturada: Codificação Modulada Modula intensidade da luz ao longo de um eixo. Codificação direta. 2 8 níveis de intensidade. Padrão único. Utiliza padrão auxiliar. Restrição a texturas de objetos. Sensível a ruídos. [28] Carihill [30] Tajima

14 Métodos de Codificação de Luz Estruturada: Codificação Modulada
15 Sistema Estudado Codificação temporal. Código de Gray.
16 Calibração de Câmeras Modelo de Tsai. Conjunto de parâmetros extrínsecos dá a orientação da câmera em relação a uma referência fixa: T matriz de translação da câmera. R matriz de rotação.
17 Calibração de Câmeras Conjunto de parâmetros intrínsecos define o as características ópticas, geométricas e digitais da câmera: f distância focal k 1 e k 2 coeficientes de distorção radial das lentes. o x e o y coordenadas do centro da imagem no plano da imagem. s x e s y fatores de escala horizontal e vertical.
18 Calibração de Câmeras f
19 Calibração de Câmeras Inicialmente modelo foi simplificado para o modelo de câmera pinhole. Houve uma necessidade de se tratar as distorções radiais: OpenCV. Calibração feita com padrões de calibração coplanares.
20 Padrões de Calibração Padrão com elipses. Padrão com vértices

21 Padrão com Elipses: Processamento Filtro Threshold Invertido Componentes Conexas A B C

22 Padrão com Elipses: Processamento A C B Bordas das Componentes A C B Centro das Elipses A B A B C C

23 Padrão com Elipses: Resultado


24 Padrão com Vértices: Protótipos



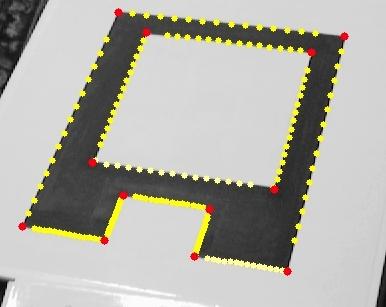
25 Padrão com Vértices: Processamento Filtro Threshold Invertido Bordas das Componentes Conexas em Listas Circulares

26 Padrão com Vértices: Processamento
27 Padrão com Vértices: Processamento Heurística para encontrar vértices nas listas. Dado uma lista de tamanho n: - x m, y m são as coordenadas de um pixel na posição m, com 1 m n. - d x x, y y dá a distância do ponto m ao m p ponto p. p m p m - Para os 2k vizinhos mais próximos ao ponto na posição m podemos definir o somatório: r m k i1 d m mi d m mi

28 Padrão com Vértices: Processamento 1. r m r min 2. r m r, p m k p m k


29 Padrão com Vértices: Processamento > 0 < 0 Fit de Reta

30 Padrão com Vértices
31 Captura e Processamento de Imagens: Ruídos Tratamento de ruídos. - Ruído Gaussiano. - Somado ao valor de cada pixel: - Distribuição Gaussiana: - Imagem média. ), ( ), ( ), ( y x n y x C y x E ) ( x e x G 1 0 ), ( 1 ), ( k i i y x E k y x E


32 Captura e Processamento de Imagens: Ruídos k 1 k 8 Câmera: Sony DFW-VL500
33 Captura e Processamento de Imagens: Codificação Temporal Eixos codificados separadamente com listras horizontais e verticais. n slides produz 2 n listras. As coordenadas codificadas de um pixel são dadas por (u,v), que é diferente das sua coordenadas na imagem da câmera. Listras projetadas devem ter a mesma largura em pixels.



34 Captura e Processamento de Imagens: Seqüência de Imagens
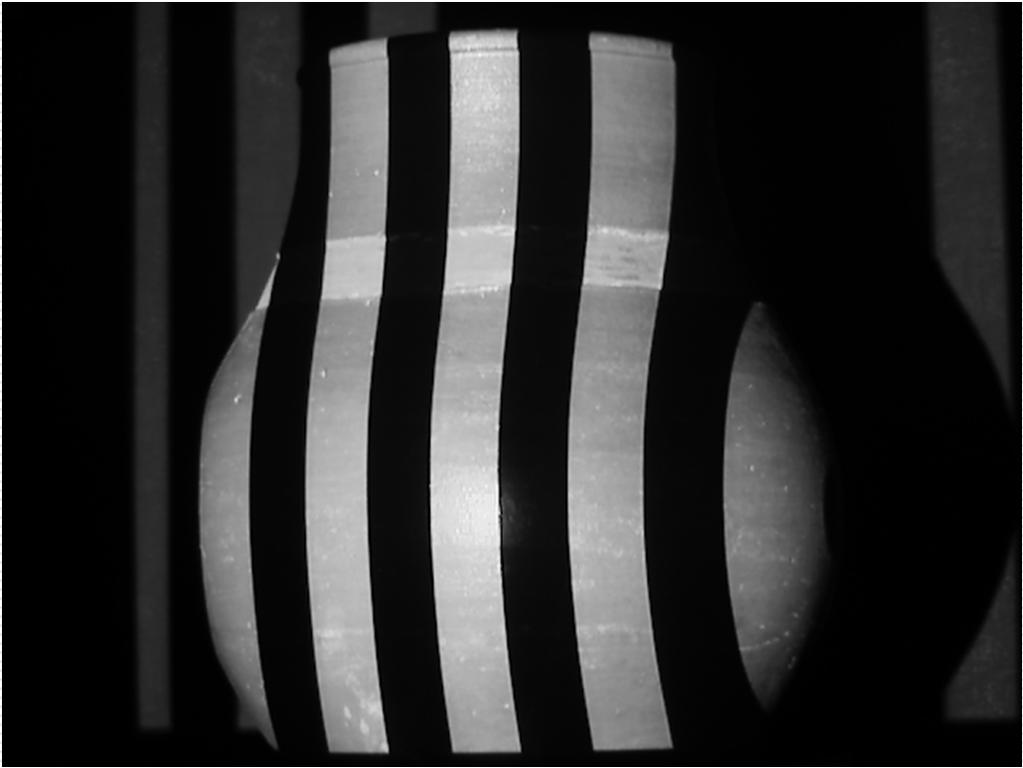


35 Captura e Processamento de Imagens: Detecção de Listras
36 Captura e Processamento de Imagens: Detecção de Listras Critério de avaliação para cada pixel na imagem. Intensidade do Pixel na Imagem do Padrão ND 30 ND 0 Intensidade do Pixel na Imagem do Padrão Inverso


37 Captura e Processamento de Imagens: Detecção de Bordas Resultado da operação.

38 Captura e Processamento de Imagens: Diferentes Exposições
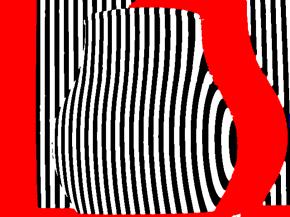












39 Captura e Processamento de Imagens: Pixels Válidos
40 Captura e Processamento de Imagens: Pixels Válidos





41 Captura e Processamento de Imagens: Decodificação Grupos de pixels conexos com mesmo par de coordenadas codificadas. ( u, v)
42 Triangulação: Ponto Médio Ponto representativo com coordenadas da imagem para cada grupo de pixels com coordenadas codificadas ( u, v).
43 Triangulação Triangulação entre os pontos médios de mesma coordenada codificada nas duas câmeras.


44 Triangulação: Nuvem de Pontos Utilizamos pontos de coordenadas codificadas vizinhas para criar polígonos.
45 Triangulação: Modelo Poligonal
46 Triangulação: Modelo Poligonal

47 Triangulação: Modelo Poligonal


48 Triangulação: Textura Imagens do objeto iluminado uniformemente são utilizadas como textura. Uma textura para cada câmera. Ponto médio é utilizado como coordenada de textura do vértice.

49 Triangulação: Textura

50 Implementação: Demonstração
51 Equipamentos Utilizados AMD Athlon XP1600+, com 512MB de memória e placa gráfica NVIDIA FX5600. Câmeras Sony DFW-VL500 da Sony. Projetores CTX EzPro 610 (LCD) e Infocus X1 (DLP).

52 Problemas Ocorridos Padrões de interferência na superfície dos modelos capturados com muitos pontos. Mesmos padrões de interferências encontrados nas imagens.

53 Problemas Ocorridos Um problema que ocorre nas fronteiras das imagens capturadas entre listras claras e escuras projetadas sobre o objeto capturado.

54 Primeiro Teste Padrão com vértices foi capturado pelo sistema. Três diferentes usuários mediram distâncias entre vértices. Calibração feita com os dois padrões.

55 Primeiro Teste Resultados do padrão com elipses. Distâncias médias dos três usuários. Desvio Padrão: 0,066cm

56 Primeiro Teste Resultados do padrão com vértices. Distâncias médias dos três usuários. Desvio Padrão: 0,073cm

57 Segundo Tese Ajuste de Cilindro Uma tubulação de PVC foi capturada. Levanta-se os parâmetros da equação paramétrica de um cilindro que melhor descreve a tubulação utilizada. No final comparamos o raio achado com o raio real da tubulação.
58 Segundo Tese Ajuste de Cilindro p ( s, ) p0 s dirz R cos( ) dirx R sin( ) diry p 0 dirz R - Ponto por onde passa o eixo central. - Direção do eixo central. - Raio do cilindro. dirx, diry e dirz são ortogonais entre si.
59 Segundo Tese Ajuste de Cilindro p0 ( a0, b0, c0) dirz ( u, v, w) Se o eixo não for paralelo ao plano XZ: p0 ( a0,0, c0) dirz ( u,1, w) Queremos minimizar para cada ponto: ( r i ) b R
60 Segundo Tese Ajuste de Cilindro Com: E: r i R 2 2 ) ( c a ),, ( c z y a x p p a ) ( ) ( c z y a x a ) 1 ( ))) ( ( )) ( ( ( w u c z w y a x u c dirz dirz dirz dirz a 0 c
61 Segundo Tese Ajuste de Cilindro Diâmetro médio do tubo: ( 150,3 0,5)mm Colocado em três diferentes posições em relação às câmeras. Câmeras foram calibradas várias vezes com cada um dos dois padrões de calibração.

62 Segundo Tese Resultados Posição A
 3,6% C4 (padrão com")
63 Segundo Tese Resultados Maiores erros: B1 (padrão com elipses) 3,6% C4 (padrão com vértices) 3,5%
64 Conclusões Calibração das câmeras deve ser melhorada. Diferença de resultados entre os dois testes. Método de codificação temporal de luz estruturada foi eficaz para diferentes tipos de objetos. Dificuldade apenas para materiais excessivamente especulares. Resolução das câmeras foi um fator limitante no sistema. Padrão de calibração com vértice pode ser utilizado em outras aplicações em tempo real.
65 Conclusões Método de ajuste de cilindro de utilização simplificada. OpenCV recomendado para aplicações de Visão Computacional em tempo real.
66 Trabalhos Futuros Melhorar a calibração de câmeras do sistema. Possivelmente utilizar calibração 3D. Utilizar melhores câmeras. Buscar outra solução mais portátil.
Reconstrução Geométrica a Partir de Imagens TIC
 Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aula 22 Conteúdo Reconstrução 3D por Luz Estruturada Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aula 22 Conteúdo Reconstrução 3D por Luz Estruturada Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia
 Gabriel Tavares Malizia Alves Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia Dissertação de Mestrado Dissertação apresentada ao Programa de Pósgraduação
Gabriel Tavares Malizia Alves Um Estudo das Técnicas de Obtenção de Forma a partir de Estéreo e Luz Estruturada para Engenharia Dissertação de Mestrado Dissertação apresentada ao Programa de Pósgraduação
2 Visão Computacional e Obtenção de Formas
 2 Visão Computacional e Obtenção de Formas Neste capítulo são abordadas as principais características e áreas de atuação da Visão Computacional e seu caráter multidisciplinar. Depois são apresentados os
2 Visão Computacional e Obtenção de Formas Neste capítulo são abordadas as principais características e áreas de atuação da Visão Computacional e seu caráter multidisciplinar. Depois são apresentados os
PMR2560 Visão Computacional Visão estéreo. Prof. Eduardo L. L. Cabral
 PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
Teresa C. S. Azevedo
 Teresa C. S. Azevedo Orientador: Prof. João Manuel R. S. Tavares Co-orientador: Prof. Mário A. P. Vaz Sumário: I. Reconstrução 3D do corpo humano: i. Aplicações; ii. Técnicas; iii. Objectivos; II. utilizadas
Teresa C. S. Azevedo Orientador: Prof. João Manuel R. S. Tavares Co-orientador: Prof. Mário A. P. Vaz Sumário: I. Reconstrução 3D do corpo humano: i. Aplicações; ii. Técnicas; iii. Objectivos; II. utilizadas
ALGEMIRO A. S. NETO.
 Calibração de Câmeras 1 ALGEMIRO A. S. NETO Pontifícia Universidade Católica do Rio de Janeiro aneto@inf.puc-rio.br Abstract Este trabalho aborda o problema de calibração de câmeras apresentando uma breve
Calibração de Câmeras 1 ALGEMIRO A. S. NETO Pontifícia Universidade Católica do Rio de Janeiro aneto@inf.puc-rio.br Abstract Este trabalho aborda o problema de calibração de câmeras apresentando uma breve
Dr. Sylvio Barbon Junior. Departamento de Computação - UEL. 1 o Semestre de 2015
 Introdução a Computação Gráfica [5COP100] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre de 2015 Assunto Aula 8 Descritores de Imagens Digitais 2 of 47 Sumário Descritores e Reconhecimento
Introdução a Computação Gráfica [5COP100] Dr. Sylvio Barbon Junior Departamento de Computação - UEL 1 o Semestre de 2015 Assunto Aula 8 Descritores de Imagens Digitais 2 of 47 Sumário Descritores e Reconhecimento
PMR2560 ELEMENTOS DE ROBÓTICA 2016 TRABALHO DE VISÃO COMPUTACIONAL CALIBRAÇÃO DE CÂMERAS E VISÃO ESTÉREO
 PMR2560 ELEMENTOS DE ROBÓTICA 2016 TRABALHO DE VISÃO COMPUTACIONAL CALIBRAÇÃO DE CÂMERAS E VISÃO ESTÉREO Esse trabalho consiste de três partes. Na primeira parte do trabalho você vai calibrar duas câmeras
PMR2560 ELEMENTOS DE ROBÓTICA 2016 TRABALHO DE VISÃO COMPUTACIONAL CALIBRAÇÃO DE CÂMERAS E VISÃO ESTÉREO Esse trabalho consiste de três partes. Na primeira parte do trabalho você vai calibrar duas câmeras
T4.1 Processamento de Imagem
 T4.1 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas 4.
T4.1 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas 4.
Capítulo III Processamento de Imagem
 Capítulo III Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas
Capítulo III Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Miguel Tavares Coimbra Resumo 1. Manipulação ponto a ponto 2. Filtros espaciais 3. Extracção de estruturas geométricas
QuadLOD: Uma Estrutura para a Visualização Interativa de Terrenos
 QuadLOD: Uma Estrutura para a Visualização Interativa de Terrenos Rodrigo Penteado R. de Toledo Orientador: Marcelo Gattass Co-orientador: Luiz Velho PUC-RIO - TecGraf OBJETIVO Gerar imagem a partir dos
QuadLOD: Uma Estrutura para a Visualização Interativa de Terrenos Rodrigo Penteado R. de Toledo Orientador: Marcelo Gattass Co-orientador: Luiz Velho PUC-RIO - TecGraf OBJETIVO Gerar imagem a partir dos
Processamento de Imagens: fundamentos. Julio C. S. Jacques Junior
 Processamento de Imagens: fundamentos Julio C. S. Jacques Junior juliojj@gmail.com Fronteiras do Processamento de Imagens Processamento de dados Dados / Informação Visão Computacional Computação Gráfica
Processamento de Imagens: fundamentos Julio C. S. Jacques Junior juliojj@gmail.com Fronteiras do Processamento de Imagens Processamento de dados Dados / Informação Visão Computacional Computação Gráfica
Investigação de novos critérios para inserção de pontos em métodos de simplificação de terreno através de refinamento
 Investigação de novos critérios para inserção de pontos em métodos de simplificação de terreno através de refinamento por Anselmo Antunes Montenegro Orientador: Paulo Cezar Pinto Carvalho, IMPA Co-orientador:
Investigação de novos critérios para inserção de pontos em métodos de simplificação de terreno através de refinamento por Anselmo Antunes Montenegro Orientador: Paulo Cezar Pinto Carvalho, IMPA Co-orientador:
Calibração de múltiplas câmeras baseada em um padrão invariante. (Multiple camera calibration based on invariant pattern)
") Calibração de múltiplas câmeras baseada em um padrão invariante (Multiple camera calibration based on invariant pattern) Manuel Eduardo Loaiza Fernandez Marcelo Gattass (orientador) Alberto B. Raposo (co-orientador)
Calibração de múltiplas câmeras baseada em um padrão invariante (Multiple camera calibration based on invariant pattern) Manuel Eduardo Loaiza Fernandez Marcelo Gattass (orientador) Alberto B. Raposo (co-orientador)
Tratamento da Imagem Transformações (cont.)
") Universidade Federal do Rio de Janeiro - IM/DCC & NCE Tratamento da Imagem Transformações (cont.) Antonio G. Thomé thome@nce.ufrj.br Sala AEP/33 Transformações Geométricas 3 Transformações Geométricas
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Tratamento da Imagem Transformações (cont.) Antonio G. Thomé thome@nce.ufrj.br Sala AEP/33 Transformações Geométricas 3 Transformações Geométricas
Autor: Diego Gouvêa Macharete Trally
 Autor: Diego Gouvêa Macharete Trally Orientador: José Gabriel R. C. Gomes 1 Introdução Motivação O Processo de Ajuste A Eletrônica do Projeto Processamento de Imagem Controle Resultados d Obtidos Conclusões
Autor: Diego Gouvêa Macharete Trally Orientador: José Gabriel R. C. Gomes 1 Introdução Motivação O Processo de Ajuste A Eletrônica do Projeto Processamento de Imagem Controle Resultados d Obtidos Conclusões
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Rastreamento de objeto e estimativa de movimento
 Hiroito Watanabe Rastreamento de objeto e estimativa de movimento Brasil 2015 Hiroito Watanabe Rastreamento de objeto e estimativa de movimento Relatório do trabalho 2 da disciplina de Processamento Digital
Hiroito Watanabe Rastreamento de objeto e estimativa de movimento Brasil 2015 Hiroito Watanabe Rastreamento de objeto e estimativa de movimento Relatório do trabalho 2 da disciplina de Processamento Digital
Apresentação de uma Plataforma Computacional para a Reconstrução e Caracterização da Forma 3D de Objectos
 Teresa Azevedo, João Manuel R. S. Tavares, Mário Vaz FEUP - Faculdade de Engenharia da Universidade do Porto LOME - Laboratório de Óptica e Mecânica Experimental Índice: I. Visão 3D; II. Computacional
Teresa Azevedo, João Manuel R. S. Tavares, Mário Vaz FEUP - Faculdade de Engenharia da Universidade do Porto LOME - Laboratório de Óptica e Mecânica Experimental Índice: I. Visão 3D; II. Computacional
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 07 - modelos de câmera Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos matriz de calibração câmera finita câmera projetiva
Processamento de Imagens CPS755 aula 07 - modelos de câmera Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos matriz de calibração câmera finita câmera projetiva
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Ciência da Computação Processamento Digital de Imagens Tópicos Detecção de Pontos Isolados Detecção de Linhas Prof. Sergio Ribeiro 2 Operações lógicas e aritméticas orientadas a vizinhança utilizam o conceito
Técnicas de renderização com textura
 Técnicas de renderização com textura INF1339 Computação Gráfica Tridimensional Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 12 de Setembro de 2013 W. Celes Técnicas de renderização
Técnicas de renderização com textura INF1339 Computação Gráfica Tridimensional Waldemar Celes celes@inf.puc-rio.br sala 505 RDC Tecgraf, DI/PUC-Rio 12 de Setembro de 2013 W. Celes Técnicas de renderização
AS MÁQUINAS DE MEDIR POR COORDENADAS (MMC)
") AS MÁQUINAS DE MEDIR POR COORDENADAS (MMC) Tópicos que serão explorados na aula Introdução Tipos de MMCs Sistema de medição (as réguas e apalpadores) Programas computacionais Erros Compensação (Calibração
AS MÁQUINAS DE MEDIR POR COORDENADAS (MMC) Tópicos que serão explorados na aula Introdução Tipos de MMCs Sistema de medição (as réguas e apalpadores) Programas computacionais Erros Compensação (Calibração
Figura. 5.1 Resposta do LED de 5 mm de diâmetro em função da corrente elétrica aplicada.
 56 5 Resultados Neste capítulo serão apresentados os resultados das medidas experimentais feitas no presente trabalho. Para facilitar a compreensão, o texto procura seguir a mesma seqüência que aquela
56 5 Resultados Neste capítulo serão apresentados os resultados das medidas experimentais feitas no presente trabalho. Para facilitar a compreensão, o texto procura seguir a mesma seqüência que aquela
Reconstrução de cenas a partir de imagens através de Escultura do Espaço por Refinamento Adaptativo
 Tese de doutorado Reconstrução de cenas a partir de imagens através de Escultura do Espaço por Refinamento Adaptativo por Anselmo A. Montenegro Orientadores: Marcelo Gattass, PUC-Rio Paulo Cezar Carvalho,
Tese de doutorado Reconstrução de cenas a partir de imagens através de Escultura do Espaço por Refinamento Adaptativo por Anselmo A. Montenegro Orientadores: Marcelo Gattass, PUC-Rio Paulo Cezar Carvalho,
Visão Computacional CPS754
 Visão Computacional CPS754 aula 11 - reconstrução 3D de câmeras Antonio Oliveira Ricardo Marroquim 1 / 1 visão computacional tópicos conhecido: conjunto de correspondências x i x não conhecido: os respectivos
Visão Computacional CPS754 aula 11 - reconstrução 3D de câmeras Antonio Oliveira Ricardo Marroquim 1 / 1 visão computacional tópicos conhecido: conjunto de correspondências x i x não conhecido: os respectivos
RECONHECIMENTO FACIAL 2D
 RECONHECIMENTO FACIAL 2D PARA SISTEMAS DE AUTENTICAÇÃO EM DISPOSITIVOS MÓVEIS Luciano Pamplona Sobrinho Orientador: Paulo César Rodacki Gomes ROTEIRO Introdução Objetivos Fundamentação Teórica Conceitos
RECONHECIMENTO FACIAL 2D PARA SISTEMAS DE AUTENTICAÇÃO EM DISPOSITIVOS MÓVEIS Luciano Pamplona Sobrinho Orientador: Paulo César Rodacki Gomes ROTEIRO Introdução Objetivos Fundamentação Teórica Conceitos
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança Conectividade Operações Lógicas e Aritméticas
Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança Conectividade Operações Lógicas e Aritméticas
Processamento Digital de Imagens
 Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança e Aritméticas Efeitos de em Pixel a Pixel
Ciência da Computação Processamento Digital de Imagens Propriedades de Imagem Digital Prof. Sergio Ribeiro Tópicos Propriedades de uma Imagem Digital Vizinhança e Aritméticas Efeitos de em Pixel a Pixel
FILTROS ESPACIAIS PASSA-BAIXA
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL PROGRAMA DE PÓS-GRADUAÇÃO EM COMPUTAÇÃO CMP65 - INTRODUÇÃO AO PROCESSAMENTO DE IMAGENS PROFESSOR JACOB SCARCHANSKI FILTROS ESPACIAIS PASSA-BAIXA POR DANIEL NEHME
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL PROGRAMA DE PÓS-GRADUAÇÃO EM COMPUTAÇÃO CMP65 - INTRODUÇÃO AO PROCESSAMENTO DE IMAGENS PROFESSOR JACOB SCARCHANSKI FILTROS ESPACIAIS PASSA-BAIXA POR DANIEL NEHME
VARREDURA ÓPTICA VERTICAL: UMA FERRAMENTA FOTOGRAMÉTRICA PARA GERAÇÃO DE NUVENS DE PONTOS
 VARREDURA ÓPTICA VERTICAL: UMA FERRAMENTA FOTOGRAMÉTRICA PARA GERAÇÃO DE NUVENS DE PONTOS ANTONIO MARIA GARCIA TOMMASELLI ADILSON BERVEGLIERI UNIVERSIDADE ESTADUAL PAULISTA - UNESP DEPARTAMENTO DE CARTOGRAFIA,
VARREDURA ÓPTICA VERTICAL: UMA FERRAMENTA FOTOGRAMÉTRICA PARA GERAÇÃO DE NUVENS DE PONTOS ANTONIO MARIA GARCIA TOMMASELLI ADILSON BERVEGLIERI UNIVERSIDADE ESTADUAL PAULISTA - UNESP DEPARTAMENTO DE CARTOGRAFIA,
Definição e elementos. Espelho Esférico É uma calota esférica na qual uma das superfícies é refletora.
 ESPELHOS ESFÉRICOS Definição e elementos Espelho Esférico É uma calota esférica na qual uma das superfícies é refletora. Definição e elementos - - - eixo secundário *Obs.: Qualquer eixo que passe pelo
ESPELHOS ESFÉRICOS Definição e elementos Espelho Esférico É uma calota esférica na qual uma das superfícies é refletora. Definição e elementos - - - eixo secundário *Obs.: Qualquer eixo que passe pelo
CAPÍTULO V 5 CONCLUSÕES E RECOMENDAÇÕES 5.1 SÍNTESE DO TRABALHO DESENVOLVIDO
 182 CAPÍTULO V 5 CONCLUSÕES E RECOMENDAÇÕES 5.1 SÍNTESE DO TRABALHO DESENVOLVIDO Neste trabalho foi proposta uma metodologia para a automação da resseção espacial de imagens digitais baseada no uso hipóteses
182 CAPÍTULO V 5 CONCLUSÕES E RECOMENDAÇÕES 5.1 SÍNTESE DO TRABALHO DESENVOLVIDO Neste trabalho foi proposta uma metodologia para a automação da resseção espacial de imagens digitais baseada no uso hipóteses
PARÂMETROS DOS EQUIPAMENTOS RADIOLOGIA
 PARÂMETROS DOS EQUIPAMENTOS RADIOLOGIA PARÂMETROS A SEREM AVALIADOS CRITÉRIOS DE DESEMPENHO FREQUÊNCIA MÍNIMA Levantamento Radiométrico Valores de dose externa com níveis inferiores a QUADRIANUAL/ Na aceitação
PARÂMETROS DOS EQUIPAMENTOS RADIOLOGIA PARÂMETROS A SEREM AVALIADOS CRITÉRIOS DE DESEMPENHO FREQUÊNCIA MÍNIMA Levantamento Radiométrico Valores de dose externa com níveis inferiores a QUADRIANUAL/ Na aceitação
EEC1515 Visão computacional. Formação das imagens
 EEC1515 Visão computacional Formação das imagens Revisão aula passada Imagem Imagem Desejamos obter informações a partir de imagens de forma computacional O que é uma imagem? Etimologia da palavra: latim
EEC1515 Visão computacional Formação das imagens Revisão aula passada Imagem Imagem Desejamos obter informações a partir de imagens de forma computacional O que é uma imagem? Etimologia da palavra: latim
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais. Prof. Adilson Gonzaga
 Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
Aula 7 - Representação e Descrição de Estruturas Bi-dimensionais Prof. Adilson Gonzaga 1 Introdução Objetos ou Segmentos são representados como uma coleção de pixels em uma imagem. Para o reconhecimento
SEL-0339 Introdução à Visão Computacional. Aula 5 Segmentação de Imagens
 Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 5 Segmentação de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga Segmentação de
Departamento de Engenharia Elétrica - EESC-USP SEL-0339 Introdução à Visão Computacional Aula 5 Segmentação de Imagens Prof. Dr. Marcelo Andrade da Costa Vieira Prof. Dr. Adilson Gonzaga Segmentação de
T4 Processamento de Imagem
 T4 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Hélder Filipe Pinto de Oliveira Resumo 1. Manipulação ponto a ponto 2. Conetividade 3. Filtros espaciais 4. Extração de estruturas
T4 Processamento de Imagem Proc. Sinal e Imagem Mestrado em Informática Médica Hélder Filipe Pinto de Oliveira Resumo 1. Manipulação ponto a ponto 2. Conetividade 3. Filtros espaciais 4. Extração de estruturas
n n n. Nessas condições, são feitas as seguintes afirmativas:
 1. (Epcar (Afa) 2017) Considere uma lente esférica delgada, S, de bordas finas, feita de material de índice de refração n maior do que o índice de refração do ar. Com esta lente podem-se realizar dois
1. (Epcar (Afa) 2017) Considere uma lente esférica delgada, S, de bordas finas, feita de material de índice de refração n maior do que o índice de refração do ar. Com esta lente podem-se realizar dois
Visão Computacional. Alessandro L. Koerich. Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR)
") Visão Computacional Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) Análise da Imagem Análise da Imagem O algoritmo opera sobre a imagem e extrai
Visão Computacional Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) Análise da Imagem Análise da Imagem O algoritmo opera sobre a imagem e extrai
Enquadramento e Conceitos Fundamentais
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Enquadramento e Conceitos Fundamentais Edward Angel, Cap. 1 Questão 9, exame de 29/06/11 [0.5v] Identifique e descreva os três
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Enquadramento e Conceitos Fundamentais Edward Angel, Cap. 1 Questão 9, exame de 29/06/11 [0.5v] Identifique e descreva os três
SLAM Visual. Fernando Zuher Mohamad Said Cavalcante Orientadora: Profª. Drª. Roseli Romero Mestrado em Computação, ICMC-USP
 SLAM Visual Fernando Zuher Mohamad Said Cavalcante Orientadora: Profª. Drª. Roseli Romero Mestrado em Computação, ICMC-USP Divisão da apresentação 1. Introdução O que é SLAM? Classificação adotada 2. Principais
SLAM Visual Fernando Zuher Mohamad Said Cavalcante Orientadora: Profª. Drª. Roseli Romero Mestrado em Computação, ICMC-USP Divisão da apresentação 1. Introdução O que é SLAM? Classificação adotada 2. Principais
2 Trabalhos Relacionados
 2 Trabalhos Relacionados Nesta seção são expostos os principais trabalhos utilizados como base para esta pesquisa. O objetivo é introduzir os conceitos que foram desenvolvidos nesses trabalhos, usados
2 Trabalhos Relacionados Nesta seção são expostos os principais trabalhos utilizados como base para esta pesquisa. O objetivo é introduzir os conceitos que foram desenvolvidos nesses trabalhos, usados
Descritores de Imagem (exemplos)
") Descritores de Imagem (exemplos) André Tavares da Silva andre.silva@udesc.br Baseado em Penatti (2009) e Silva (2011) Alguns exemplos Descritores baseados em cor Na literatura existem quatro abordagens
Descritores de Imagem (exemplos) André Tavares da Silva andre.silva@udesc.br Baseado em Penatti (2009) e Silva (2011) Alguns exemplos Descritores baseados em cor Na literatura existem quatro abordagens
Reconstrução 3D. Métodos
 Reconstrução 3D Prof. Dr. Márcio Sarroglia Pinho Material elaborado a partir de TCs dos alunos Fernando Muraro Witzke Lucas Scheibler de Carvalho Otávio Basso Gomes Métodos w Com Contato Físico w Máquinas
Reconstrução 3D Prof. Dr. Márcio Sarroglia Pinho Material elaborado a partir de TCs dos alunos Fernando Muraro Witzke Lucas Scheibler de Carvalho Otávio Basso Gomes Métodos w Com Contato Físico w Máquinas
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Processamento de Imagens CPS755 aula 08 - calibração de câmera Antonio Oliveira Ricardo Marroquim 1 / 40 laboratório de processamento de imagens tópicos homografia 3D 2D distorção propriedades do centro
Uso de Técnicas Baseadas em Pontos para Visualização de Horizontes Sísmicos
 Uso de Técnicas Baseadas em Pontos para Visualização de Horizontes Sísmicos Orientador Professor Marcelo Gattass Ricardo Szczerbacki Organização da Apresentação Motivação Objetivos Dissertação Conclusão
Uso de Técnicas Baseadas em Pontos para Visualização de Horizontes Sísmicos Orientador Professor Marcelo Gattass Ricardo Szczerbacki Organização da Apresentação Motivação Objetivos Dissertação Conclusão
Processamento de Imagens
 Processamento de Imagens Prof. Julio Arakaki Ciência da Computação 1 Imagem Digital Full Color Image (Matriz de Pixels) RGB (24 bits): Red (8 bits) Green (8 bits) Blue (8 bits) 2 Imagem Digital Um modelo
Processamento de Imagens Prof. Julio Arakaki Ciência da Computação 1 Imagem Digital Full Color Image (Matriz de Pixels) RGB (24 bits): Red (8 bits) Green (8 bits) Blue (8 bits) 2 Imagem Digital Um modelo
Enquadramento e Conceitos Fundamentais
 Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Enquadramento e Conceitos Fundamentais Edward Angel, Cap. 1 Questão 9, exame de 29/06/11 [0.5v] Identifique e descreva os três
Licenciatura em Engenharia Informática e de Computadores Computação Gráfica Enquadramento e Conceitos Fundamentais Edward Angel, Cap. 1 Questão 9, exame de 29/06/11 [0.5v] Identifique e descreva os três
Processamento de Imagem. A Imagem digital Professora Sheila Cáceres
 Processamento de Imagem A Imagem digital Professora Sheila Cáceres Visão Humana Processamento de Imagens 2 Semelhança entre o sistema visual humano e uma câmera fotográfica Várias semelhanças podem ser
Processamento de Imagem A Imagem digital Professora Sheila Cáceres Visão Humana Processamento de Imagens 2 Semelhança entre o sistema visual humano e uma câmera fotográfica Várias semelhanças podem ser
Descritores de Imagem (introdução)
") Descritores de Imagem (introdução) André Tavares da Silva andre.silva@udesc.br Roteiro da aula Definição de descritor de imagem Extração de Característica Tipos Geral x Específico Global (cor, textura,
Descritores de Imagem (introdução) André Tavares da Silva andre.silva@udesc.br Roteiro da aula Definição de descritor de imagem Extração de Característica Tipos Geral x Específico Global (cor, textura,
iar 2.0: API o,mizada para aplicações de entretenimento em realidade aumentada na plataforma ios
 iar 2.0: API o,mizada para aplicações de entretenimento em realidade aumentada na plataforma ios Állan Milbratz de Camargo Orientador: Dalton Solano dos Reis FURB Universidade Regional de Blumenau DSC
iar 2.0: API o,mizada para aplicações de entretenimento em realidade aumentada na plataforma ios Állan Milbratz de Camargo Orientador: Dalton Solano dos Reis FURB Universidade Regional de Blumenau DSC
VISÃO COMPUTACIONAL. Marcelo Henrique dos Santos
 VISÃO COMPUTACIONAL Marcelo Henrique dos Santos marcelosantos@outlook.com São Paulo SP, Agosto/2013 INTRODUÇÃO Processamento de imagens é um processo onde a entrada do sistema é uma imagem e a saída é
VISÃO COMPUTACIONAL Marcelo Henrique dos Santos marcelosantos@outlook.com São Paulo SP, Agosto/2013 INTRODUÇÃO Processamento de imagens é um processo onde a entrada do sistema é uma imagem e a saída é
Processamento digital de imagens
 Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 11 de novembro de 2016 Fluxo óptico Usado para estimar
Processamento digital de imagens Agostinho Brito Departamento de Engenharia da Computação e Automação Universidade Federal do Rio Grande do Norte 11 de novembro de 2016 Fluxo óptico Usado para estimar
Processamento de Imagem. Filtragem no Domínio Espacial Professora Sheila Cáceres
 Processamento de Imagem Filtragem no Domínio Espacial Professora Sheila Cáceres Filtragem A filtragem de imagens pode ser realizada no domínio do espaço e da frequência Operadores de filtragem são classificados
Processamento de Imagem Filtragem no Domínio Espacial Professora Sheila Cáceres Filtragem A filtragem de imagens pode ser realizada no domínio do espaço e da frequência Operadores de filtragem são classificados
Processamento de Imagens Marcia A. S. Bissaco
 Engenharia Biomédica Processamento de Imagens Marcia A. S. Bissaco 1 Exemplos filtros Média Mediana Passa_B Passa_A Borda_H Borda_V Sobel_Y Sobel_X Oliveira, Henrique J. Quintino (UMC-SP), 2 Media Mediana
Engenharia Biomédica Processamento de Imagens Marcia A. S. Bissaco 1 Exemplos filtros Média Mediana Passa_B Passa_A Borda_H Borda_V Sobel_Y Sobel_X Oliveira, Henrique J. Quintino (UMC-SP), 2 Media Mediana
Objetos Gráficos Espaciais
 Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Espaciais Prof. Thales Vieira 2014 Objetos Gráficos Espaciais f : U R m 7! R 3 Universo físico Objetos gráficos Representação de
Universidade Federal de Alagoas Instituto de Matemática Objetos Gráficos Espaciais Prof. Thales Vieira 2014 Objetos Gráficos Espaciais f : U R m 7! R 3 Universo físico Objetos gráficos Representação de
Carlos Vinícius Sousa de Oliveira rio.br. Orientador: Prof. Marcelo Gattass
 Carlos Vinícius Sousa de Oliveira coliveira@inf.puc rio.br Orientador: Prof. Marcelo Gattass 29/03/2010 Interpolação de imagens (Microsoft)? Problema abordado por César Dificuldades Determinação de mapas
Carlos Vinícius Sousa de Oliveira coliveira@inf.puc rio.br Orientador: Prof. Marcelo Gattass 29/03/2010 Interpolação de imagens (Microsoft)? Problema abordado por César Dificuldades Determinação de mapas
AS MÁQUINAS DE MEDIR POR COORDENADAS (MMC)
") AS MÁQUINAS DE MEDIR POR COORDENADAS (MMC) ERROS ERROS ERRO DE ABBÈ ERROS ERROS GEOMÉTRICOS Erros de Translação Retilineidade horizontal YAW Retilineidade vertical Erro de posição Erros de Rotação Erro
AS MÁQUINAS DE MEDIR POR COORDENADAS (MMC) ERROS ERROS ERRO DE ABBÈ ERROS ERROS GEOMÉTRICOS Erros de Translação Retilineidade horizontal YAW Retilineidade vertical Erro de posição Erros de Rotação Erro
Processamento de Malhas Poligonais
 Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
Processamento de Malhas Poligonais Tópicos Avançados em Computação Visual e Interfaces I Prof.: Marcos Lage www.ic.uff.br/~mlage mlage@ic.uff.br Conteúdo: Notas de Aula Curvas 06/09/2015 Processamento
PMR2560 Visão Computacional Detecção de bordas. Prof. Eduardo L. L. Cabral
 PMR56 Visão Computacional Detecção de bordas Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Características; Detecção de bordas. Características Tipos de características: Bordas; Cantos;
PMR56 Visão Computacional Detecção de bordas Prof. Eduardo L. L. Cabral Objetivos Processamento de imagens: Características; Detecção de bordas. Características Tipos de características: Bordas; Cantos;
Geometria Analítica. Cônicas. Prof Marcelo Maraschin de Souza
 Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Geometria Analítica Cônicas Prof Marcelo Maraschin de Souza É o lugar geométrico dos pontos de um plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Considere dois pontos distintos
Visão computacional. Juliana Patrícia Detroz Orientador: André Tavares Silva
 Visão computacional Juliana Patrícia Detroz Orientador: André Tavares Silva Visão computacional Tentativa de replicar a habilidade humana da visão através da percepção e entendimento de uma imagem; Fazer
Visão computacional Juliana Patrícia Detroz Orientador: André Tavares Silva Visão computacional Tentativa de replicar a habilidade humana da visão através da percepção e entendimento de uma imagem; Fazer
Processamento de Imagens COS756 / COC603
 Processamento de Imagens COS756 / COC603 aula 15 - Fluxo Ótico - parte I Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje fluxo ótico estimando movimentos em imagens 2 / 1 motivação para que serve?
Processamento de Imagens COS756 / COC603 aula 15 - Fluxo Ótico - parte I Antonio Oliveira Ricardo Marroquim 1 / 1 aula de hoje fluxo ótico estimando movimentos em imagens 2 / 1 motivação para que serve?
AULA 4. Atividade Complementar 10: Sistemas lineares 2x2 e sua interpretação geométrica 31
 AULA 4 Atividade Complementar 10: Sistemas lineares 2x2 e sua interpretação geométrica 31 Conteúdos Estruturantes: Números e Álgebra / Geometrias Conteúdo Básico: Sistemas lineares / Geometria espacial
AULA 4 Atividade Complementar 10: Sistemas lineares 2x2 e sua interpretação geométrica 31 Conteúdos Estruturantes: Números e Álgebra / Geometrias Conteúdo Básico: Sistemas lineares / Geometria espacial
Chamamos de instrumentos de projeção aqueles que fornecem uma imagem real, que pode, portanto, ser projetada em um anteparo, uma tela ou um filme.
 Chamamos de instrumentos de projeção aqueles que fornecem uma imagem real, que pode, portanto, ser projetada em um anteparo, uma tela ou um filme. A câmera fotográfica é constituída essencialmente por
Chamamos de instrumentos de projeção aqueles que fornecem uma imagem real, que pode, portanto, ser projetada em um anteparo, uma tela ou um filme. A câmera fotográfica é constituída essencialmente por
Visão Computacional. Alessandro L. Koerich. Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR)
") Visão Computacional Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) Processamento da Informação Capturei uma Imagem! E agora? Assumindo que
Visão Computacional Alessandro L. Koerich Programa de Pós-Graduação em Engenharia Elétrica Universidade Federal do Paraná (UFPR) Processamento da Informação Capturei uma Imagem! E agora? Assumindo que
Letras em Negrito representam vetores e as letras i, j, k são vetores unitários.
 Lista de exercício 3 - Fluxo elétrico e Lei de Gauss Letras em Negrito representam vetores e as letras i, j, k são vetores unitários. 1. A superfície quadrada da Figura tem 3,2 mm de lado e está imersa
Lista de exercício 3 - Fluxo elétrico e Lei de Gauss Letras em Negrito representam vetores e as letras i, j, k são vetores unitários. 1. A superfície quadrada da Figura tem 3,2 mm de lado e está imersa
Reconstrução Geométrica a Partir de Imagens TIC /TCC
 Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Reconstrução Geométrica a Partir de Imagens TIC-00.243/TCC-00.241 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2014.2/tic-00.243
Computação Gráfica e Processamento de Imagens. - Sistemas 3D (conceitos básicos) Prof. Julio Arakaki
 Prof. Julio Arakaki") Computação Gráfica e Processamento de Imagens - Sistemas 3D (conceitos básicos) Prof. Julio Arakaki Sistemas tri-dimensionais (3D) Conceitos de sistemas tri-dimensionais Os objetos são construídos através
Computação Gráfica e Processamento de Imagens - Sistemas 3D (conceitos básicos) Prof. Julio Arakaki Sistemas tri-dimensionais (3D) Conceitos de sistemas tri-dimensionais Os objetos são construídos através
Câmeras Fotogramétricas. Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia
 Câmeras Fotogramétricas Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Câmeras Fotográficas São todos os dispositivos que, através de um sistema ótico, registram a energia refletida
Câmeras Fotogramétricas Fotogrametria e Fotointerpretação Prof. Dr. Raoni W. D. Bosquilia Câmeras Fotográficas São todos os dispositivos que, através de um sistema ótico, registram a energia refletida
Definição e elementos. Espelho Esférico é uma calota esférica na qual uma das superfícies é refletora.
 ESPELHOS ESFÉRICOS Definição e elementos Espelho Esférico é uma calota esférica na qual uma das superfícies é refletora. Definição e elementos - - - eixo secundário *Obs.: Qualquer eixo que passe pelo
ESPELHOS ESFÉRICOS Definição e elementos Espelho Esférico é uma calota esférica na qual uma das superfícies é refletora. Definição e elementos - - - eixo secundário *Obs.: Qualquer eixo que passe pelo
Consultas por Similaridade em Domínios de Dados Complexos
 Consultas por Similaridade em Domínios de Dados Complexos Guilherme Felipe Zabot Orientador: Profº Dr Caetano Traina Jr Roteiro Objetivo Introdução Dados Complexos Representação de Dados Complexos Extração
Consultas por Similaridade em Domínios de Dados Complexos Guilherme Felipe Zabot Orientador: Profº Dr Caetano Traina Jr Roteiro Objetivo Introdução Dados Complexos Representação de Dados Complexos Extração
FÍSICA IV ÓPTICA GEOMÉTRICA. Daniel C. Zanotta
 FÍSICA IV ÓPTICA GEOMÉTRICA Daniel C. Zanotta Ju/2018 IMAGEM (I) DE UM OBJETO REAL (O) visalisada por um observador através de um espelho plano: O Objeto I Imagem p distância do objeto q distância da imagem
FÍSICA IV ÓPTICA GEOMÉTRICA Daniel C. Zanotta Ju/2018 IMAGEM (I) DE UM OBJETO REAL (O) visalisada por um observador através de um espelho plano: O Objeto I Imagem p distância do objeto q distância da imagem
Primeiro Teste de CVGA
 Primeiro Teste de CVGA 31 de Março de 2005 Questão 1 [1 ponto] O triângulo com vértices em P 1 ( 2, 4, 0), P 2 (1, 2, 1) e P 3 ( 1, 1, 2) é equilátero? Questão 2 [1 ponto] O triângulo com vértices em P
Primeiro Teste de CVGA 31 de Março de 2005 Questão 1 [1 ponto] O triângulo com vértices em P 1 ( 2, 4, 0), P 2 (1, 2, 1) e P 3 ( 1, 1, 2) é equilátero? Questão 2 [1 ponto] O triângulo com vértices em P
IDENTIFICAÇÃO DE MARCADORES DE PAVIMENTAÇÃO NA ORIENTAÇÃO DE CEGOS. André Zuconelli 1 ; Manassés Ribeiro 2
 IDENTIFICAÇÃO DE MARCADORES DE PAVIMENTAÇÃO NA ORIENTAÇÃO DE CEGOS André Zuconelli 1 ; Manassés Ribeiro 2 INTRODUÇÃO As tecnologias assistivas têm a finalidade de auxiliar pessoas com deficiência a alcançar
IDENTIFICAÇÃO DE MARCADORES DE PAVIMENTAÇÃO NA ORIENTAÇÃO DE CEGOS André Zuconelli 1 ; Manassés Ribeiro 2 INTRODUÇÃO As tecnologias assistivas têm a finalidade de auxiliar pessoas com deficiência a alcançar
ÓPTICA GEOMÉTRICA PREGOLINI
 LENTES ESFÉRICAS LENTES CONVERGENTES ÓPTICA GEOMÉTRICA PREGOLINI Elementos Propriedades Construção Geométrica de Imagens LENTES DIVERGENTES Elementos Propriedades Construção Geométrica de Imagens CONVERGÊNCIA
LENTES ESFÉRICAS LENTES CONVERGENTES ÓPTICA GEOMÉTRICA PREGOLINI Elementos Propriedades Construção Geométrica de Imagens LENTES DIVERGENTES Elementos Propriedades Construção Geométrica de Imagens CONVERGÊNCIA
UNIVERSIDADE FEDERAL FLUMINENSE Pedro Martins Menezes. Um estudo dos estágios dos pipelines gráficos
 UNIVERSIDADE FEDERAL FLUMINENSE Pedro Martins Menezes Um estudo dos estágios dos pipelines gráficos Niterói 2008 Pedro Martins Menezes Um estudo dos estágios dos pipelines gráficos Trabalho de Conclusão
UNIVERSIDADE FEDERAL FLUMINENSE Pedro Martins Menezes Um estudo dos estágios dos pipelines gráficos Niterói 2008 Pedro Martins Menezes Um estudo dos estágios dos pipelines gráficos Trabalho de Conclusão
25 Problemas de Óptica
 25 Problemas de Óptica Escola Olímpica - Gabriel Lefundes 25 de julho de 2015 Problema 1. O ângulo de deflexão mínimo um certo prisma de vidro é igual ao seu ângulo de refração. Encontre-os. Dado: n vidro
25 Problemas de Óptica Escola Olímpica - Gabriel Lefundes 25 de julho de 2015 Problema 1. O ângulo de deflexão mínimo um certo prisma de vidro é igual ao seu ângulo de refração. Encontre-os. Dado: n vidro
Reconstrução Geométrica a Partir de Imagens TIC
 Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Reconstrução Geométrica a Partir de Imagens TIC-10.073 Aulas 2 e 3 Conteúdo Geometria Projetiva 2D Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Material disponível em http://www.ic.uff.br/~laffernandes/teaching/2016.1/tic-10.073
Características Geométricas
 Prof. Daniel Dias A: área da seção transversal do perfil (cm²) x g, y g : coordenadas do centro de gravidade I x : momento de inércia em relação ao eixo x (cm²) I y ; momento de inércia em relação ao eixo
Prof. Daniel Dias A: área da seção transversal do perfil (cm²) x g, y g : coordenadas do centro de gravidade I x : momento de inércia em relação ao eixo x (cm²) I y ; momento de inércia em relação ao eixo
Filtros de Gabor Da Teoria à Aplicação
 Filtros de Gabor Da Teoria à Aplicação Ricardo J. Ferrari, Ph.D. rferrari@icmc.usp.br Instituto de Ciências Matemáticas e de Computação Universidade de São Paulo São Carlos, Brasil Introdução Sumário Sistema
Filtros de Gabor Da Teoria à Aplicação Ricardo J. Ferrari, Ph.D. rferrari@icmc.usp.br Instituto de Ciências Matemáticas e de Computação Universidade de São Paulo São Carlos, Brasil Introdução Sumário Sistema
Introdução USP - EESC
 Introdução O controle de acesso para prevenir abusos. O roubo de identidade. Interesse crescente no desenvolvimento de sistemas de identificação pessoal confiáveis. Aplicações civil, comercial e financeira.
Introdução O controle de acesso para prevenir abusos. O roubo de identidade. Interesse crescente no desenvolvimento de sistemas de identificação pessoal confiáveis. Aplicações civil, comercial e financeira.
6 Procedimento Experimental 6.1. Medição com PIV
 6 Procedimento Experimental 6.1. Medição com PIV Para se obter imagens de qualidade e resultados confiáveis ao utilizar a técnica de velocimetria por imagem de partículas (PIV), é necessário fazer uma
6 Procedimento Experimental 6.1. Medição com PIV Para se obter imagens de qualidade e resultados confiáveis ao utilizar a técnica de velocimetria por imagem de partículas (PIV), é necessário fazer uma
Professora Bruna FÍSICA B. Aulas 19 e 20 Construindo Imagens. Página 189
 FÍSICA B Aulas 19 e 20 Construindo Imagens Página 189 INTRODUÇÃO Onde e para que finalidade utilizamos lentes? Assim como fizemos para construção de imagens em espelhos esféricos, definiremos alguns pontos
FÍSICA B Aulas 19 e 20 Construindo Imagens Página 189 INTRODUÇÃO Onde e para que finalidade utilizamos lentes? Assim como fizemos para construção de imagens em espelhos esféricos, definiremos alguns pontos
Física 3 - EMB5043. Prof. Diego Duarte Campos magnéticos produzidos por correntes (lista 9) 7 de novembro de 2017
 7 de novembro de 2017") Física 3 - EMB5043 Prof. Diego Duarte Campos magnéticos produzidos por correntes (lista 9) 7 de novembro de 2017 1. A figura 1 mostra dois fios. O fio de baixo conduz uma corrente i 1 = 0,40 A e inclui
Física 3 - EMB5043 Prof. Diego Duarte Campos magnéticos produzidos por correntes (lista 9) 7 de novembro de 2017 1. A figura 1 mostra dois fios. O fio de baixo conduz uma corrente i 1 = 0,40 A e inclui
VISÃO COMPUTACIONAL. Nielsen Castelo Damasceno
 VISÃO COMPUTACIONAL Nielsen Castelo Damasceno Visão Computacional A visão computacional lida com o desenvolvimento de bases teóricas e algorítmicas para as quais informações úteis do mundo real 3D podem
VISÃO COMPUTACIONAL Nielsen Castelo Damasceno Visão Computacional A visão computacional lida com o desenvolvimento de bases teóricas e algorítmicas para as quais informações úteis do mundo real 3D podem
Detecção de características. Fabíola Alvares R. de Souza Maffra Orientador: Marcelo Gattass
 Detecção de características faciais utilizando FERNS Fabíola Alvares R. de Souza Maffra Orientador: Marcelo Gattass Dissertação de mestrado 20 de agosto de 2009 Agenda Motivação e objetivo Desafios Contribuições
Detecção de características faciais utilizando FERNS Fabíola Alvares R. de Souza Maffra Orientador: Marcelo Gattass Dissertação de mestrado 20 de agosto de 2009 Agenda Motivação e objetivo Desafios Contribuições
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 01 - geometria projetiva e transformações 2D Antonio Oliveira Ricardo Marroquim 1 / 44 laboratório de processamento de imagens tópicos geometria projetiva transformações
Processamento de Imagens CPS755 aula 01 - geometria projetiva e transformações 2D Antonio Oliveira Ricardo Marroquim 1 / 44 laboratório de processamento de imagens tópicos geometria projetiva transformações
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III
 UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
UNIVERSIDADE FEDERAL DE VIÇOSA DEPARTAMENTO DE MATEMÁTICA LISTA DE EXERCÍCIOS DE MAT243-CÁLCULO III Capítulo 1 Vetores no Rn 1. Sejam u e v vetores tais que e u v = 2 e v = 1. Calcule v u v. 2. Sejam u
Respostas do Teste de Analise de Imagens :
 Respostas do Teste de Analise de Imagens - 2004: 1Diga com suas palavras o que é: (Valor total da questão: 12) Filtragem passa alta (valor deste item até 0,3) - importante falar que apesar do nome ser
Respostas do Teste de Analise de Imagens - 2004: 1Diga com suas palavras o que é: (Valor total da questão: 12) Filtragem passa alta (valor deste item até 0,3) - importante falar que apesar do nome ser
Universidade Federal do Rio de Janeiro - IM/DCC & NCE
 Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Universidade Federal do Rio de Janeiro - IM/DCC & NCE Processamento de Imagens Segmentação Antonio G. Thomé thome@nce.ufrj.br Sala AEP/133 Conceituação Segmentação é uma tarefa básica no processo de análise
Definição e elementos. Espelho Esférico é uma calota esférica na qual uma das superfícies é refletora.
 ESPELHOS ESFÉRICOS Definição e elementos Espelho Esférico é uma calota esférica na qual uma das superfícies é refletora. Definição e elementos - - - eixo secundário *Obs.: Qualquer eixo que passe pelo
ESPELHOS ESFÉRICOS Definição e elementos Espelho Esférico é uma calota esférica na qual uma das superfícies é refletora. Definição e elementos - - - eixo secundário *Obs.: Qualquer eixo que passe pelo
MouseCam: aplicação de controle do mouse via câmera
 MouseCam: aplicação de controle do mouse via câmera Introdução ao Processamento de Imagens COS756 PESC/COPPE/UFRJ 2013 1 Renan Garrot garrot@cos.ufrj.br 1. Introdução O processo de tracking por vídeo consiste
MouseCam: aplicação de controle do mouse via câmera Introdução ao Processamento de Imagens COS756 PESC/COPPE/UFRJ 2013 1 Renan Garrot garrot@cos.ufrj.br 1. Introdução O processo de tracking por vídeo consiste
Exemplos. Propagação (Reconstrução)
") Processamento de Imagens Médicas Morfologia Matemática em Imagens Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) Propagação (Reconstrução) lgoritmos Baseados
Processamento de Imagens Médicas Morfologia Matemática em Imagens Prof. Luiz Otavio Murta Jr. Informática Biomédica Depto. de Física e Matemática (FFCLRP/USP) Propagação (Reconstrução) lgoritmos Baseados
Processamento de Imagem. Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres
 Professora Sheila Cáceres") Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Processamento de Imagem Convolução Filtragem no Domínio da Frequência (Fourier) Professora Sheila Cáceres Lembrando Filtragem Correlação A correlação e a convolução sãos dois conceitos relacionados a filtragem.
Óptica Geométrica. Construções geométricas em lentes delgadas"
 Óptica Geométrica Construções geométricas em lentes delgadas" Gonçalo Figueira goncalo.figueira@tecnico.ulisboa.pt Complexo Interdisciplinar, ext. 3375 Tel. 218 419 375 1.º semestre 2015/16" https://fenix.tecnico.ulisboa.pt/disciplinas/lfeb2517/2015-2016/1-semestre"
Óptica Geométrica Construções geométricas em lentes delgadas" Gonçalo Figueira goncalo.figueira@tecnico.ulisboa.pt Complexo Interdisciplinar, ext. 3375 Tel. 218 419 375 1.º semestre 2015/16" https://fenix.tecnico.ulisboa.pt/disciplinas/lfeb2517/2015-2016/1-semestre"
Geometria do Elipsoide. FGL João F Galera Monico PPGCC Abril 2018
 Geometria do Elipsoide FGL João F Galera Monico PPGCC Abril 2018 Elipsoide de Revolução Rotação de uma elipse sobre um de seus eixos! Neste caso: eixo Z Elipse no plano YZ com X = 0 Z Elipse no plano XY
Geometria do Elipsoide FGL João F Galera Monico PPGCC Abril 2018 Elipsoide de Revolução Rotação de uma elipse sobre um de seus eixos! Neste caso: eixo Z Elipse no plano YZ com X = 0 Z Elipse no plano XY