Sistemas Microcontrolados
|
|
|
- Giuliana Canejo Lobo
- 5 Há anos
- Visualizações:
Transcrição
1 Ciência da Computação Sistemas Microcontrolados Função dos Registradores no PIC Prof. Sergio F. Ribeiro Os Registradores Especiais que Controlam Tudo Vimos que configurações podem ser feitas para definir as portas como entradas ou saídas, ativar as interrupções, ativar a contagem do TMR0 por sinal externo, etc. Mas, afinal, onde ficam essas configurações? Como vimos anteriormente (em memória de dados), o PIC possui uma série de registradores especiais, denominados SFR (Special Function Registers), que servem exatamente para guardar a configuração e o estado atual da máquina. Veremos agora um apanhado geral sobre esses registradores. Mais detalhes serão comentados quando formos partir pra programação do PIC. 2
2 Registradores de Função Especial OPTION Esse registrador serve para configurar uma série de opções para a operação do microcontrolador: habilitação dos pull-ups do PortB, configurações do prescaler, configurações do TMR0 e seleção da borda para a interrupção externa. 3 Registradores de Função Especial INTCON, PIR1 e PIE1 Esses registradores servem para configurar e identificar todas as interrupções existentes no PIC16F628A. O registrador INTCON opera com as interrupções principais: Timer 0, interrupção externa e interrupção por mudança de estado. Além disso, o INTCON possui a chave geral de todas as interrupções (GIE) e a chave geral para as interrupções de periféricos. Os registradores PIR1 e PIE1 são os responsáveis pelas interrupções de periféricos: EEPROM, Comparadores, USART, CCP, Timer 1 e Timer 2. 4
3 Registradores de Função Especial INTCON, PIR1 e PIE1 5 TRIS Registradores de Função Especial Esses registradores servem para configurar os pinos das portas como entrada ou saída. Quando é colocado 1 em um bit do TRIS, o pino relacionado a ele é configurado como entrada. Para configurar o pino como saída, deve-se escrever 0 no bit relacionado. Uma maneira prática para memorizar essa regra é associar o 1 ao I de Input (Entrada), e o 0 ao O de Output (saída). Para configurar o PortA, deve ser utilizado o TrisA, e para configurar o PortB, deve ser utilizado o TrisB. 6

4 Registradores de Função Especial PORTS Como já foi visto, o PIC16F628A possui duas portas: PortA e PortB. Quando um pino é configurado como entrada, ao lermos o seu bit relacionado, encontraremos diretamente o nível lógico aplicado a esse pino. Da mesma maneira, ao configurarmos um pino como saída, podemos alterar seu estado escrevendo diretamente no bit relacionado. 7 Registradores de Função Especial 8
5 Registradores de Função Especial TIMER 0 O TMR0 é um registrador de 8 bits que pode ser acessado diretamente na memória, para a leitura e para a escrita. A diferença entre ele e os demais registradores é que seu incremento é automático e pode ser feito pelo clock da máquina ou por um sinal externo. Vale lembrar que o estouro desse contador pode gerar uma interrupção. O estouro ocorre quando o contador atinge seu valor máximo, e logo em seguida volta a zerar. Os registradores responsáveis pela configuração do Timer 0 são: INTCON e OPTION. 9 10
6 11 Registradores de Função Especial TIMER 1 O TMR1 é um contador de 16 bits que também pode ser acessado diretamente na memória, tanto para a leitura quanto para a escrita. No entanto, devido ao seu tamanho, esse registrador é armazenado em dois endereços: TMR1H (parte alta) e TMR1L (parte baixa). Além disso, o registrador T1CON é o responsável pelas configurações relacionadas ao Timer1: habilitação, prescaler, oscilador externo próprio, origem do incremento (interno ou externo) e sincronismo de incremento. O estouro desse contador pode gerar uma interrupção. 12
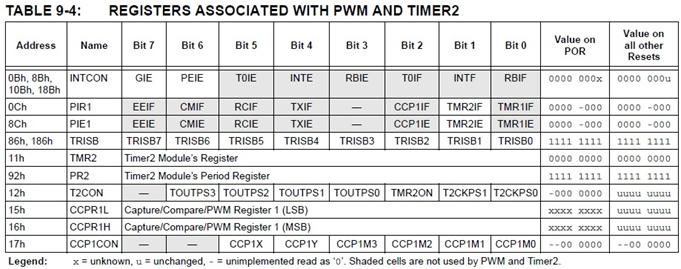
7 13 Registradores de Função Especial TIMER 2 O Timer 2 é um temporizador de 8 bits com um prescaler e um postscaler. O Timer 2 pode ser usado como base de tempo PWM para o modo PWM do módulo CCP. O TMR2 é outro contador de 8 bits também acessado diretamente na memória para leitura e escrita. O registrador T2CON é o responsável pelas configurações do Timer 2: habilitação, prescaler e postscaler. Uma interrupção é gerada quando o valor do TMR2 se iguala ao valor de um outro registrador chamado PR2. 14

8 15 Registradores de Função Especial CCP1CON, CCPR1H e CCPR1L Através do módulo CCP é possível acessar três modos diferentes de operação: Capture, Compare e PWM. O registrador CCP1CON é o responsável pela configuração desse modo. O módulo CCP utiliza ainda o TMR1 como base de tempo e os registradores complementares CCPR1H (parte alta) e CCPR1L (parte baixa). 16
9 17 Módulo CCP O módulo CCP (Capture/Compare/PWM) é um periférico que permite, ao programador, controlar e medir diversos eventos. Este módulo pode atuar no modo: captura comparação modulação por largura de pulso (Pulse Width Modulation PWM) Cada um destes modos podem ser configurados via registradores especiais. 18

10 Módulo CCP 19 Módulo CCP 20
 quando um evento ocorre no pino RB3/CCP1 (pino 9).")
11 Módulo CCP Modo Capture Permite medir a duração de tempo durante um evento. Os registradores CCPR1H:CCPR1L capturam o valor de 16 bits do par de registradores do Timer 1 (TMR1H:TMR1L) quando um evento ocorre no pino RB3/CCP1 (pino 9). Esse evento pode ser: cada borda de descida cada borda de subida cada 4ª borda de subida cada 16ª borda de subida Quando uma captura ocorre, a flag de interrupção CCP1IF é setada. Esta flag deve ser limpa por software. Obs: para que a captura ocorra, o Timer 1 deve estar rodando. 21 Módulo CCP Modo Compare O valor do CCP (registradores CCPR1H:CCPR1L) é constantemente comparado com o valor do Timer 1 (TMR1H:TMR1L). Quando os valores coincidem, a flagccpif é setada e a interrupção ocorre. Além disso, pode-se zerar o Timer 1 ou forçar um estado no pino RB3/CCP1 (setar, resetar ou permanecer inalterado). Este modo pode ser usado para gerar um pulso do tamanho que desejar. 22
12 Controle PWM O PWM (Pulse Width Modulation Modulação por Largura de Pulso) pode ser usado para o controle de velocidade de motores e da intensidade luminosa de LEDs. A maneira mais simples de se controlar a potência aplicada em uma carga é através de um reostato em série. Este é um tipo de controle de potência linear. Desvantagem: grande quantidade de calor gerada. 23 Controle PWM Os controles de potência, entre outros circuitos, utilizam o conceito PWM (Pulse Width Modulation) como base de seu funcionamento. A idéia do PWM é o uso de um interruptor de ação muito rápida aplicado a uma carga que deve ser controlada. Interruptor aberto sem corrente na carga e potência nula. Interruptor fechado a carga recebe a tensão total da fonte, e potência é máxima. 24
13 Controle PWM Como fazer para obter uma potência intermediária, digamos 50%, aplicada à carga? deve-se abrir e fechar a chave rapidamente de modo a ficar 50% do tempo aberta e 50% fechada. isto significa que, em média, teremos metade do tempo com corrente e metade do tempo sem corrente. t1 chave fechada t2 chave aberta A relação entre o tempo de um pulso e a duração de um ciclo completo de operação do interruptor nos define o ciclo ativo (duty cycle). 25 Controle PWM Fixando a frequência e variando-se a largura do pulso tem-se ciclos ativos diferentes. Assim, quando a largura de pulso varia de zero até o máximo, a potência também varia na mesma proporção. Este princípio é usado justamente no controle PWM. 26
14 Módulo CCP Modo PWM O modo PWM permite utilizar sinais modulados em largura de pulso. Consiste em representar um valor pelo duty-cycle (tempo em alto) de um trem de pulsos de frequência fixa. Sua resolução máxima é de 10 bits. isto significa que 1023 corresponde a 100% de duty-cycle. usando uma regra de três simples podemos determinar a quanto corresponde 30%, 25%, 99%, etc. É chamada de modulação porque permite carregar uma informação (expressa no duty-cycle) em uma portadora (trem de pulsos). O PWM pode ser utilizado no acionamento de cargas DC, controle de motores, etc. 27 Módulo CCP Modo PWM O PWM precisa de uma base de tempo que dará a frequência do sinal. O módulo CCP utiliza o Timer2 para conseguir essa base de tempo para o PWM. Também é necessário que o pino RB3/CCP1 seja configurado como saída. Usaremos o modo PWM para o controle de velocidade do motor DC em um robô. Mais detalhes de configuração do modo PWM serão vistos durante a programação do módulo CCP na linguagem C. 28
15 USART A USART (Interface Serial Universal Síncrona/Assíncrona) também chamada de SCI (Interface de Comunicação Serial), é um dispositivo interno para fazer comunicação serial com elementos externos como: computadores modens terminais memórias conversores A/D e D/A Esses dois registradores possibilitam a transmissão e recepção de dados simultânea (full-duplex no modo assíncrono). No modo síncrono, só é possível a comunicação half-duplex (transmissão e recepção alternada). A USART possui dois registradores de deslocamento: TSR responsável pela conversão paralelo/serial (transmissão). RSR responsável pela conversão serial/paralelo (recepção). 29 USART Os sinais transmitidos/recebidos pela USART fluem por dois pinos externos do PIC16F628A: RB1 e RB2. RB1 atua como entrada (recepção de dados) no modo assíncrono. E atua como entrada/saída de dados no modo síncrono. RB2 atua como saída (transmissão de dados) no modo assíncrono e como saída de clock no modo síncrono. A USART faz uso do protocolo RS-232 para a comunicação serial de dados. Os níveis de tensão utilizados na comunicação RS-232 não são compatíveis com os níveis CMOS/TTL. Para conectar o microcontrolador a uma porta serial do computador é necessário utilizar conversores de nível. Um dos mais conhecidos é o MAX
16 Conversor Analógico-Digital O conversor A/D converte uma grandeza analógica (temperatura, luminosidade, etc.) em um valor digital (representação binária) proporcional a ela. Esse valor depende diretamente da resolução do conversor e da tensão de referência (V ref ) utilizada na conversão, podendo variar de 0 a (2 resolução 1) unidades. Equação de conversão de uma tensão de entrada V in para um valor digital: Conversor Analógico-Digital O PIC16F628A não possui um conversor A/D. O conversor A/D do PIC18F4550 possui 13 canais analógicos multiplexados (AN0 a AN12) e uma resolução de 10 bits. Os pinos configurados como entrada analógica devem ser definidos como entrada através do registrador TRIS. Os registradores ADCON0 e ADCON1 são responsáveis pela configuração do conversor A/D do PIC18F4550. Mais detalhes sobre o uso do conversor A/D serão vistos durante a programação do PIC na linguagem C. 32

17 Conversor Analógico-Digital 33 Conversor Analógico-Digital 34
18 Conversor Analógico-Digital 35 Gravação do Microcontrolador A gravação do microcontrolador PIC pode ser realizada sem que o componente seja retirado da placa ou protoboard(gravação in-circuit ou ICSP). Essa gravação é feita de forma serial utilizando somente dois pinos: RB6/PGC (pino 12) para o clock e RB7/PGD (pino 13) para envio de dados. Além dos pinos RB6 e RB7, é necessário que o pino MCLR/VPP receba uma tensão de 13V DC ± 0.5V durante o processo de gravação. Também é necessário que o microcontrolador esteja devidamente alimentado, portanto V DD e V SS devem estar também conectados. 36


 38")
19 Gravação do Microcontrolador Gravador de PIC: K150 Software do gravador: microbrn 37 Gravação do Microcontrolador Gravação in-circuit (ICSP) 38


20 Simulação no Proteus No ISIS Proteus é possível criar esquemas elétricos e realizar simulações destes esquemas no próprio ambiente. 39 Simulação no Proteus Utilizaremos o Proteus pra realizar a simulação de qualquer sistema microcontrolado antes de criá-lo na prática. Ex: 40
21 Ferramentas de Desenvolvimento Como ferramentas para o desenvolvimento de aplicações para o PIC16F628A são usados o simulador Proteus, o ambiente de desenvolvimento MPLAB e um compilador C. O Proteus é um ótimo software de simulação de circuitos. Usaremos o MPLAB como meio para gravar o PIC. no interior do kit educacional no laboratório de hardware há um gravador de microcontroladores PIC chamado PICKIT2. Há muitos compiladores C para microcontroladores PIC, como: PCW, C18, MikroC, entre outros. 41 Ferramentas de Desenvolvimento O compilador C a ser usado no laboratório é o MikroCda Mikroelektronika. O MikroCé um dos compiladores mais adotados para a programação de microcontroladores PIC. Isso se deve ao fato dele gerar um firmware menor, ocupando menos espaço de memória no PIC. E outra vantagem do MikroC é sua total compatibilidade com o C padrão ANSI e a facilidade de programar em sua linguagem C, com uma curva de aprendizado mais curta. Ao programar em C, recomenda-se consultar o datasheet do PIC16F628A, assim como o help do compilador. 42
22 Bibliografia Desbravando o PIC Ampliado e Atualizado para PIC16F628A David José de Souza. Datasheet do PIC16F628A. Material online de Fábio B. de Souza 43
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados - PIC16F877A
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados - PIC16F877A
Sistemas Microcontrolados. Período Aula 9. 1 Saulo O. D. Luiz
 Sistemas Microcontrolados Período 2009.2 Aula 9 1 Saulo O. D. Luiz Roteiro Módulos CCP Captura Comparação Modulação por largura de pulso (PWM) 2 Saulo O. D. Luiz Módulos CCP Os módulos CCP são formados
Sistemas Microcontrolados Período 2009.2 Aula 9 1 Saulo O. D. Luiz Roteiro Módulos CCP Captura Comparação Modulação por largura de pulso (PWM) 2 Saulo O. D. Luiz Módulos CCP Os módulos CCP são formados
AAAA AAAA SEL Aplicação de Microprocessadores I. Aula 5 Temporização e Interrupção. Marcelo Andrade da Costa Vieira
 SEL 0629 Aplicação de Microprocessadores I Aula 5 Temporização e Interrupção Marcelo Andrade da Costa Vieira Contagem de Tempo Contando tempo Existem 3 maneiras de contarmos tempo com os microcontroladores
SEL 0629 Aplicação de Microprocessadores I Aula 5 Temporização e Interrupção Marcelo Andrade da Costa Vieira Contagem de Tempo Contando tempo Existem 3 maneiras de contarmos tempo com os microcontroladores
INTRODUÇÃO: MICROCONTROLADORES
 INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
Sistemas Microcontrolados
 Sistemas Microcontrolados Aula 5: Interrupções e Temporizadores Marco Jose da Silva mdasilva@utfpr.edu.br Interrupções Interrupção é um evento externo ao programa que provoca: A parada da sua execução;
Sistemas Microcontrolados Aula 5: Interrupções e Temporizadores Marco Jose da Silva mdasilva@utfpr.edu.br Interrupções Interrupção é um evento externo ao programa que provoca: A parada da sua execução;
Interrupções e Timers
 Interrupções e timers Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 4 de dezembro de 2013 Objetivos Compreender o funcionamento de um display de sete segmentos Compreender
Interrupções e timers Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 4 de dezembro de 2013 Objetivos Compreender o funcionamento de um display de sete segmentos Compreender
1.2 Registradores relacionados as Interrupções. 3. TOSE Sentido da transição da borda do sinal aplicado am TMR0
 Capítulo 1 Interrupções 1.1 O que são interrupções? Como o nome sugere interrompe a execução normal e exige atenção urgente da CPU. São eventos não previsíveis e assim não pode ser oferecido tempo de CPU
Capítulo 1 Interrupções 1.1 O que são interrupções? Como o nome sugere interrompe a execução normal e exige atenção urgente da CPU. São eventos não previsíveis e assim não pode ser oferecido tempo de CPU
LABORATÓRIO DE ARQUITETURA DE COMPUTADORES PREPARAÇÃO 03: INTERRUPÇÕES
 AEVSF Autarquia Educacional do Vale do São Francisco FACAPE Faculdade de Ciências Aplicadas e Sociais de Petrolina Curso de Ciência da Computação LABORATÓRIO DE ARQUITETURA DE COMPUTADORES Prof. Sérgio
AEVSF Autarquia Educacional do Vale do São Francisco FACAPE Faculdade de Ciências Aplicadas e Sociais de Petrolina Curso de Ciência da Computação LABORATÓRIO DE ARQUITETURA DE COMPUTADORES Prof. Sérgio
Circuito Eletrônico. Entendendo o circuito eletrônico na robótica. domingo, 28 de agosto de 11
 Circuito Eletrônico Entendendo o circuito eletrônico na robótica Circuito Integrado Um circuito integrado híbrido é um circuito eletrônico miniaturizado constituído de dispositivos semicondutores individuais,
Circuito Eletrônico Entendendo o circuito eletrônico na robótica Circuito Integrado Um circuito integrado híbrido é um circuito eletrônico miniaturizado constituído de dispositivos semicondutores individuais,
LABORATÓRIO DE ARQUITETURA DE COMPUTADORES PREPARAÇÃO 02: DISPLAY DE 7 SEGMENTOS MICROCONTROLADO
 AEVSF Autarquia Educacional do Vale do São Francisco FACAPE Faculdade de Ciências Aplicadas e Sociais de Petrolina Curso de Ciência da Computação LABORATÓRIO DE ARQUITETURA DE COMPUTADORES Prof. Sérgio
AEVSF Autarquia Educacional do Vale do São Francisco FACAPE Faculdade de Ciências Aplicadas e Sociais de Petrolina Curso de Ciência da Computação LABORATÓRIO DE ARQUITETURA DE COMPUTADORES Prof. Sérgio
Aplicações Avançadas de Microprocessadores. Professor: Marco Shawn Meireles Machado
 Aplicações Avançadas de Microprocessadores Professor: Marco Shawn Meireles Machado Iniciação aos sistemas microcontrolados Objetivos da Aula: Descrever os itens que compõem uma CPU; Detalhar a estrutura
Aplicações Avançadas de Microprocessadores Professor: Marco Shawn Meireles Machado Iniciação aos sistemas microcontrolados Objetivos da Aula: Descrever os itens que compõem uma CPU; Detalhar a estrutura
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Microcontroladores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Sistemas Embarcados
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Microcontroladores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Sistemas Embarcados
Suporta os microcontroladores: R. Leonardo da Vinci, Campinas/SP CEP F.: (19) Kit de Desenvolvimento ACEPIC 28
 Kit de Desenvolvimento ACEPIC 28") Suporta os microcontroladores: PIC16F870, PIC16F872, PIC16F873A, PIC16F876A, PIC16F886, PIC18F2420, PIC18F2520, PIC18F2525, PIC18F2620, PIC18F2455, PIC 18F2550 e outros com 28 pinos O Kit de desenvolvimento
Suporta os microcontroladores: PIC16F870, PIC16F872, PIC16F873A, PIC16F876A, PIC16F886, PIC18F2420, PIC18F2520, PIC18F2525, PIC18F2620, PIC18F2455, PIC 18F2550 e outros com 28 pinos O Kit de desenvolvimento
Arquitetura PIC - PWM
 Arquitetura PIC - PWM Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Aprender o que é a técnica de PWM Compreender a utilidade da técnica Aprender a utilizar
Arquitetura PIC - PWM Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Aprender o que é a técnica de PWM Compreender a utilidade da técnica Aprender a utilizar
Sistemas Microcontrolados. Período Aula 6. 1 Saulo O. D. Luiz
 Sistemas Microcontrolados Período 2009.2 Aula 6 1 Saulo O. D. Luiz Roteiro Entrada e saída Portas 2 Saulo O. D. Luiz Porta Porta um registrador conectado aos pinos do microcontrolador 3 Saulo O. D. Luiz
Sistemas Microcontrolados Período 2009.2 Aula 6 1 Saulo O. D. Luiz Roteiro Entrada e saída Portas 2 Saulo O. D. Luiz Porta Porta um registrador conectado aos pinos do microcontrolador 3 Saulo O. D. Luiz
Cerne. Conhecimento para o Desenvolvimento. Cerne Tecnologia e Treinamento
 Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de Assembly para o PIC16F628A (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe:
Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de Assembly para o PIC16F628A (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe:
Objetivos MICROCONTROLADORES HARDWARE. Aula 03: Periféricos. Prof. Mauricio. MICRO I Prof. Mauricio 1. Arquitetura de um Microcontrolador
 MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Aula 03: Objetivos 2 Arquitetura de um Microcontrolador Unidade Central de Processamento Portas de Entrada e Saída Porta Serial Temporizador / Contador Conversor
MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Aula 03: Objetivos 2 Arquitetura de um Microcontrolador Unidade Central de Processamento Portas de Entrada e Saída Porta Serial Temporizador / Contador Conversor
Microcontroladores: Programação em C
 Aula 10 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 11/04/2013 1 Conversor A/D Conceitos Conversores analógico digitais (conversores A/D ou ADC) convertem um sinal analógico em um equivalente
Aula 10 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 11/04/2013 1 Conversor A/D Conceitos Conversores analógico digitais (conversores A/D ou ADC) convertem um sinal analógico em um equivalente
KIT DIDÁTICO PIC-2377
 KIT DIDÁTICO PIC-77... Módulo PIC-77 Recursos internos da MCU Encapsulamento DIP40. 5 instruções (RISC). pinos de I/O configuráveis. 56 bytes de EEPROM para dados de 8 bits. 8k de memória flash para o
KIT DIDÁTICO PIC-77... Módulo PIC-77 Recursos internos da MCU Encapsulamento DIP40. 5 instruções (RISC). pinos de I/O configuráveis. 56 bytes de EEPROM para dados de 8 bits. 8k de memória flash para o
1.1 Noções básicas sobre interrupções em Microcontroladores
 Capítulo 1 Interrupções 1.1 Noções básicas sobre interrupções em Microcontroladores PIC Interrupções é obrigação em uma programação profissional. Quando um evento ocorrer, uma bandeira de interrupção será
Capítulo 1 Interrupções 1.1 Noções básicas sobre interrupções em Microcontroladores PIC Interrupções é obrigação em uma programação profissional. Quando um evento ocorrer, uma bandeira de interrupção será
Registros do 16F628A. Prof. Luiz Antonio Vargas Pinto Prof. Vargas
 Registros do 16F628A www.mikroe.com Prof. Luiz Antonio Vargas Pinto www.vargasp.com STATUS (03) STATUS (03) Após RESET Chave dos bancos STATUS (03) Bit 7: IRP - Seleção de banco de registradores 0 - seleciona
Registros do 16F628A www.mikroe.com Prof. Luiz Antonio Vargas Pinto www.vargasp.com STATUS (03) STATUS (03) Após RESET Chave dos bancos STATUS (03) Bit 7: IRP - Seleção de banco de registradores 0 - seleciona
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Temporizadores e Contadores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Temporizadores
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Temporizadores e Contadores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Temporizadores
Laboratório de Hardware
 Ciência da Computação Laboratório de Hardware Introdução ao Microcontrolador PIC Prof. Sergio Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas lógicas
Ciência da Computação Laboratório de Hardware Introdução ao Microcontrolador PIC Prof. Sergio Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas lógicas
Jadsonlee da Silva Sá
 Introdução aos Sistemas Microcontrolados Jadsonlee da Silva Sá Jadsonlee.sa@univasf.edu.br www.univasf.edu.br/~jadsonlee.sa Introdução aos Sistemas Microcontrolados Assembly, C, java,... Circuito Reset
Introdução aos Sistemas Microcontrolados Jadsonlee da Silva Sá Jadsonlee.sa@univasf.edu.br www.univasf.edu.br/~jadsonlee.sa Introdução aos Sistemas Microcontrolados Assembly, C, java,... Circuito Reset
Cerne. Conhecimento para o Desenvolvimento. Cerne Tecnologia e Treinamento
 Cerne Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de Pascal Avançado para PIC16F877A (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com
Cerne Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de Pascal Avançado para PIC16F877A (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com
Acetatos de apoio às aulas teóricas
 Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 10 de Dezembro de 2004 Microprocessadores
Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 10 de Dezembro de 2004 Microprocessadores
Projeto de Sistemas Eletrônicos
 Curso de Formação Profissional Técnico em Eletroeletrônica Módulo II Senai Arcos-MG Projeto de Sistemas Eletrônicos Raphael Roberto Ribeiro Silva Técnico em eletroeletrônica pelo INPA Arcos Estudante de
Curso de Formação Profissional Técnico em Eletroeletrônica Módulo II Senai Arcos-MG Projeto de Sistemas Eletrônicos Raphael Roberto Ribeiro Silva Técnico em eletroeletrônica pelo INPA Arcos Estudante de
Funções dos Microcontroladores Microcontroladores e Microprocessadores Especialização em Automação Industrial
 Funções dos Microcontroladores Microcontroladores e Microprocessadores Especialização em Automação Industrial 1 LCD - PIC Configure um projeto normalmente e na aba LCD (External) marque as opções Use LCD
Funções dos Microcontroladores Microcontroladores e Microprocessadores Especialização em Automação Industrial 1 LCD - PIC Configure um projeto normalmente e na aba LCD (External) marque as opções Use LCD
Curso de Microcontroladores PIC 16F84A
 Curso de Microcontroladores PIC 16F84A João Neto Caetano Jnetcaetano@hotmail.com Marciel Gonçalves Azevedo Marcielgazevedo@hotmail.com Célio Rodrigues Pinto Treinamentos em geral, suporte a alunos universitários
Curso de Microcontroladores PIC 16F84A João Neto Caetano Jnetcaetano@hotmail.com Marciel Gonçalves Azevedo Marcielgazevedo@hotmail.com Célio Rodrigues Pinto Treinamentos em geral, suporte a alunos universitários
O protocolo SPI. 1 - Introdução. 2 Ligação física
 O protocolo SPI 1 - Introdução O protocolo SPI ( Serial Peripheral Interface ) é um protocolo síncrono de alta velocidade utilizado na comunicação de circuitos integrados. Atualmente existem conversores
O protocolo SPI 1 - Introdução O protocolo SPI ( Serial Peripheral Interface ) é um protocolo síncrono de alta velocidade utilizado na comunicação de circuitos integrados. Atualmente existem conversores
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
Microcontroladores: Programação em C
 Aula 09 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 10/04/2013 1 PWM Conceitos Definição PWM é a sigla para Pulse Width Modulation (Modulação por Largura de Pulso). É uma técnica utilizada
Aula 09 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 10/04/2013 1 PWM Conceitos Definição PWM é a sigla para Pulse Width Modulation (Modulação por Largura de Pulso). É uma técnica utilizada
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Interfaces de Entradas e Saídas DCA0119 Sistemas Digitais Heitor Medeiros Florencio
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Interfaces de Entradas e Saídas DCA0119 Sistemas Digitais Heitor Medeiros Florencio
Sistemas Microcontrolados
 Ciência da Computação Sistemas Microcontrolados Introdução aos Microcontroladores PIC Prof. Sergio F. Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas
Ciência da Computação Sistemas Microcontrolados Introdução aos Microcontroladores PIC Prof. Sergio F. Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas
Interrupções do Interrupções Gabriel Kovalhuk. UTFPR DAELN - Tecnologia em Mecatrônica Industrial
 Interrupções do 8051 Interrupções Interrupções do 8051 Evento aleatório à sequência normal do programa; Quando ocorre o evento, o programa é desviado para a função de atendimento da interrupção; O endereço
Interrupções do 8051 Interrupções Interrupções do 8051 Evento aleatório à sequência normal do programa; Quando ocorre o evento, o programa é desviado para a função de atendimento da interrupção; O endereço
Sistemas Microcontrolados. Período Aula Saulo O. D. Luiz
 Sistemas Microcontrolados Período 2009.2 Aula 10 1 Saulo O. D. Luiz Roteiro Conversor A/D 2 Saulo O. D. Luiz Introdução Símbolo do Conversor A/D Diagrama de blocos Fonte: ZANCO, Wagner da Silva. Microcontroladores
Sistemas Microcontrolados Período 2009.2 Aula 10 1 Saulo O. D. Luiz Roteiro Conversor A/D 2 Saulo O. D. Luiz Introdução Símbolo do Conversor A/D Diagrama de blocos Fonte: ZANCO, Wagner da Silva. Microcontroladores
ENG-1450 Microcontroladores e Sistemas Embarcados. Lab02 Apresentação Kit PicGenios Interrupção e Timers
 ENG-1450 Microcontroladores e Sistemas Embarcados Lab02 Apresentação Kit PicGenios Interrupção e Timers Atividades 1. Executar tarefas da aula anterior no kit 2. Exemplo1: 1.Acionar o LED por interrupção
ENG-1450 Microcontroladores e Sistemas Embarcados Lab02 Apresentação Kit PicGenios Interrupção e Timers Atividades 1. Executar tarefas da aula anterior no kit 2. Exemplo1: 1.Acionar o LED por interrupção
SEL0338 Tópicos Especiais em Sistemas Digitais
 1 Formato das Instruções Instruções Orientadas a Byte: instrução f,d Designador do Registrador do arquivo (endereço Hexa ou Label) a ser usado pela instrução Exemplo: MOVF f,d ; move o conteúdo do registrador
1 Formato das Instruções Instruções Orientadas a Byte: instrução f,d Designador do Registrador do arquivo (endereço Hexa ou Label) a ser usado pela instrução Exemplo: MOVF f,d ; move o conteúdo do registrador
Application Note FBEE Controle de Placas com entradas Analógicas REV01. 1 Rev01
 Application Note FBEE Controle de Placas com entradas Analógicas REV01 1 Rev01 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
Application Note FBEE Controle de Placas com entradas Analógicas REV01 1 Rev01 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
Placa de desenvolvimento USB AFSmartBoard utiliza PIC18F4550 da Microchip, microcontrolador com o Flash 32kb, 2048 bytes de memória RAM
 Guia rápido AFSmart Board PIC18F4550-I/P Placa de desenvolvimento USB AFSmartBoard utiliza PIC18F4550 da Microchip, microcontrolador com o Flash 32kb, 2048 bytes de memória RAM Características Placa para
Guia rápido AFSmart Board PIC18F4550-I/P Placa de desenvolvimento USB AFSmartBoard utiliza PIC18F4550 da Microchip, microcontrolador com o Flash 32kb, 2048 bytes de memória RAM Características Placa para
Faculdade de Tecnologia SENAI Pernambuco - Unidade Santo Amaro Curso de Tecnologia em Mecatrônica Industrial
 Serviço Nacional de Aprendizagem Industrial Departamento Regional de Pernambuco Faculdade de Tecnologia SENAI Pernambuco - Unidade Santo Amaro Curso de Tecnologia em Mecatrônica Industrial Disciplina:
Serviço Nacional de Aprendizagem Industrial Departamento Regional de Pernambuco Faculdade de Tecnologia SENAI Pernambuco - Unidade Santo Amaro Curso de Tecnologia em Mecatrônica Industrial Disciplina:
Arduino Básico: As versatilidades desta plataforma na prática
 Arduino Básico: As versatilidades desta plataforma na prática Apresentação Kleber Rocha Bastos Luan Silva Santana Wellington Assunção Azevedo Graduado em Engenharia de Computação pela FAINOR Graduado em
Arduino Básico: As versatilidades desta plataforma na prática Apresentação Kleber Rocha Bastos Luan Silva Santana Wellington Assunção Azevedo Graduado em Engenharia de Computação pela FAINOR Graduado em
Microcontroladores PIC16 - XM 116 -
 T e c n o l o g i a Microcontroladores PIC16 - XM 116 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC16 - XM 116 - INTRODUÇÃO O mundo da
T e c n o l o g i a Microcontroladores PIC16 - XM 116 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC16 - XM 116 - INTRODUÇÃO O mundo da
Cerne. Conhecimento para o Desenvolvimento. Cerne Tecnologia e Treinamento. Apostila de BASIC para PIC16F628A
 Cerne Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de BASIC para PIC16F628A (21) 43-9798 (11) 43-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
Cerne Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de BASIC para PIC16F628A (21) 43-9798 (11) 43-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
Período Saulo O. D. Luiz
 Sistemas Microcontrolados Período 2009.2 Aula 2 1 Saulo O. D. Luiz Roteiro Características de um Microcontrolador 2 Saulo O. D. Luiz Características de um Microcontrolador Microcontrolador de fabricantes
Sistemas Microcontrolados Período 2009.2 Aula 2 1 Saulo O. D. Luiz Roteiro Características de um Microcontrolador 2 Saulo O. D. Luiz Características de um Microcontrolador Microcontrolador de fabricantes
Conversor Analógico Digital do MSP430G2553
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO TÉCNICO INTEGRADO DE NÍVEL MÉDIO - ELETRÔNICA MICROCONTROLADORES 2 Conversor Analógico Digital do MSP430G2553 O MSP430G2553
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO TÉCNICO INTEGRADO DE NÍVEL MÉDIO - ELETRÔNICA MICROCONTROLADORES 2 Conversor Analógico Digital do MSP430G2553 O MSP430G2553
Objetivos MICROCONTROLADORES HARDWARE. Microcontroladores I. Prof. Mauricio. Micro-I Prof. Mauricio 1. Microcontroladores PIC. Requisitos de Hardware
 MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Microcontroladores I Objetivos 2 Microcontroladores PIC Famílias PIC PIC 16F877A Tipos de Encapsulamentos Requisitos de Hardware Prof. Mauricio 1 Microcontroladores
MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Microcontroladores I Objetivos 2 Microcontroladores PIC Famílias PIC PIC 16F877A Tipos de Encapsulamentos Requisitos de Hardware Prof. Mauricio 1 Microcontroladores
Montagem do Robô. Especificações. domingo, 28 de agosto de 11
 Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Implementando PWM por soft - um método simples. Por Renie S. Marquet reniemarquet.sites.com.br - versão
 Implementando PWM por soft - um método simples. Por Renie S. Marquet reniemarquet.sites.com.br - versão 25.02.2005 O PWM (Pulse Width Modulation Modulação por largura de pulso) consiste em controlar o
Implementando PWM por soft - um método simples. Por Renie S. Marquet reniemarquet.sites.com.br - versão 25.02.2005 O PWM (Pulse Width Modulation Modulação por largura de pulso) consiste em controlar o
Prof. Adilson Gonzaga
 Prof. Adilson Gonzaga Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos Xtal1 e Xtal2 da CPU.
Prof. Adilson Gonzaga Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos Xtal1 e Xtal2 da CPU.
FACULDADE LEÃO SAMPAIO
 FACULDADE LEÃO SAMPAIO Sistemas analógicos e digitais Curso de Análise e Desenvolvimento de Sistemas 1 Analógico x Digital Sinal analógico: O sinal analógico varia continuamente ao longo de uma faixa de
FACULDADE LEÃO SAMPAIO Sistemas analógicos e digitais Curso de Análise e Desenvolvimento de Sistemas 1 Analógico x Digital Sinal analógico: O sinal analógico varia continuamente ao longo de uma faixa de
Arquitetura do Microcontrolador Atmega 328
 Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Arquitetura do Microcontrolador Atmega
Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Arquitetura do Microcontrolador Atmega
Data Sheet FBEE Kit V05
 Data Sheet FBEE Kit V05 IEEE 802.15.4 SUPORTA PROTOCOLOS ZIGBEE E MIWI REV 02 1 Rev02 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
Data Sheet FBEE Kit V05 IEEE 802.15.4 SUPORTA PROTOCOLOS ZIGBEE E MIWI REV 02 1 Rev02 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO
 Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO PROXSYS Versão 1.3 Abril -2015 Controlador Industrial CP-WS1 1- Configurações
Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WSMIO2DI2DO PROXSYS Versão 1.3 Abril -2015 Controlador Industrial CP-WS1 1- Configurações
Interrupção. Prof. Adilson Gonzaga
 Interrupção Prof. Adilson Gonzaga Estrutura de Programação Assembly Programa Principal Chamada de Sub-rotina1 Programa Principal Chamada de Sub-rotina2 Sub-rotina1 Subrotina2 Programa Principal Chamada
Interrupção Prof. Adilson Gonzaga Estrutura de Programação Assembly Programa Principal Chamada de Sub-rotina1 Programa Principal Chamada de Sub-rotina2 Sub-rotina1 Subrotina2 Programa Principal Chamada
Cerne. Conhecimento para o Desenvolvimento. Cerne Tecnologia e Treinamento
 Conhecimento para o Desenvolvimento Tecnologia e Treinamento Apostila de Assembly para AT89S8252 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
Conhecimento para o Desenvolvimento Tecnologia e Treinamento Apostila de Assembly para AT89S8252 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
OMódulo Comparador Analógico consiste em um conjunto
 Módulo Comparador Analógico Roteiro N o 05 Fundação Universidade Federal de Rondônia, Núcleo de Ciência e Tecnologia, Departamento de Engenharia - DEE Curso de Bacharelado em Engenharia Elétrica - Disciplina
Módulo Comparador Analógico Roteiro N o 05 Fundação Universidade Federal de Rondônia, Núcleo de Ciência e Tecnologia, Departamento de Engenharia - DEE Curso de Bacharelado em Engenharia Elétrica - Disciplina
Estrutura Básica de um Computador
 SEL-0415 Introdução à Organização de Computadores Estrutura Básica de um Computador Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira INTRODUÇÃO n Organização Æ implementação do hardware, componentes, construção
SEL-0415 Introdução à Organização de Computadores Estrutura Básica de um Computador Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira INTRODUÇÃO n Organização Æ implementação do hardware, componentes, construção
CANAL ANALÓGICO
 CANAL ANALÓGICO CANAL ANALÓGICO (Introdução) Variáveis analógicas apresentam variação modular em função do tempo, como por exemplo a temperatura, pressão, nível, etc. Para trabalhar com estas variáveis,
CANAL ANALÓGICO CANAL ANALÓGICO (Introdução) Variáveis analógicas apresentam variação modular em função do tempo, como por exemplo a temperatura, pressão, nível, etc. Para trabalhar com estas variáveis,
Sumário. 1. Apresentação Hardware Microcontrolador PIC16F628A Displays de 7 segmentos Teclas...
 02/03/2011 Sumário 1. Apresentação... 3 2. Hardware... 4 2.1. Microcontrolador PIC16F628A... 4 2.2. Displays de 7 segmentos... 4 2.3. Teclas... 4 2.4. Leds... 5 2.5. Lâmpada... 5 2.6. Botão de reset manual...
02/03/2011 Sumário 1. Apresentação... 3 2. Hardware... 4 2.1. Microcontrolador PIC16F628A... 4 2.2. Displays de 7 segmentos... 4 2.3. Teclas... 4 2.4. Leds... 5 2.5. Lâmpada... 5 2.6. Botão de reset manual...
PLANO DE ENSINO. Período Letivo:2016-1
 Fone (49) 353-4300 PLANO DE ENSINO BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO Componente Curricular: Microcontroladores Carga Horária: 60h Professor: Giovani Pasetti 1. Ementa Período Letivo:016-1
Fone (49) 353-4300 PLANO DE ENSINO BACHARELADO EM ENGENHARIA DE CONTROLE E AUTOMAÇÃO Componente Curricular: Microcontroladores Carga Horária: 60h Professor: Giovani Pasetti 1. Ementa Período Letivo:016-1
Sistemas Microcontrolados
 Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
PIC32 Uma Nova Tecnologia
 VITOR AMADEU SOUZA PIC32 Uma Nova Tecnologia Com base no modelo PIC32MX320F032H Programado em C pelo Compilador C32 Microchip Vitor Amadeu Souza 2010 by Cerne Tecnologia e Treinamento Ltda. 2010 by Vitor
VITOR AMADEU SOUZA PIC32 Uma Nova Tecnologia Com base no modelo PIC32MX320F032H Programado em C pelo Compilador C32 Microchip Vitor Amadeu Souza 2010 by Cerne Tecnologia e Treinamento Ltda. 2010 by Vitor
MINICURSO - PLATAFORMA ARDUINO Eixo de Informação e Comunicação Gil Eduardo de Andrade
 Introdução MINICURSO - PLATAFORMA ARDUINO Eixo de Informação e Comunicação Gil Eduardo de Andrade A oficina proposta neste documento apresenta conceitos iniciais e intermediários sobre o funcionamento
Introdução MINICURSO - PLATAFORMA ARDUINO Eixo de Informação e Comunicação Gil Eduardo de Andrade A oficina proposta neste documento apresenta conceitos iniciais e intermediários sobre o funcionamento
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Interfaces com o Mundo Analógico DCA0119 Sistemas Digitais Heitor Medeiros Florencio
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Interfaces com o Mundo Analógico DCA0119 Sistemas Digitais Heitor Medeiros Florencio
Introdução à Plataforma ARDUINO
 MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
OMicrocontrolador PIC16F877A apresenta dois módulos
 Módulo CCP Roteiro N o 06 Fundação Universidade Federal de Rondônia, Núcleo de Ciência e Tecnologia, Departamento de Engenharia - DEE Curso de Bacharelado em Engenharia Elétrica - Disciplina de Sistemas
Módulo CCP Roteiro N o 06 Fundação Universidade Federal de Rondônia, Núcleo de Ciência e Tecnologia, Departamento de Engenharia - DEE Curso de Bacharelado em Engenharia Elétrica - Disciplina de Sistemas
Descrição dos pinos de entrada e saída e de funções especiais. Descrição dos modos de acesso: individual e por porto
 Tópicos Descrição dos pinos de entrada e saída e de funções especiais Descrição dos modos de acesso: individual e por porto Acesso individual aos pinos Objetivos Compreender o que são periféricos em um
Tópicos Descrição dos pinos de entrada e saída e de funções especiais Descrição dos modos de acesso: individual e por porto Acesso individual aos pinos Objetivos Compreender o que são periféricos em um
Interrupção Externa. Capítulo 1. Noções básicas sobre interrupções em Microcontroladores PIC
 Capítulo 1 Interrupção Externa Noções básicas sobre interrupções em Microcontroladores PIC Seção 1.1 Interrupções é obrigação em uma programação profissional. Quando um evento ocorrer, uma bandeira de
Capítulo 1 Interrupção Externa Noções básicas sobre interrupções em Microcontroladores PIC Seção 1.1 Interrupções é obrigação em uma programação profissional. Quando um evento ocorrer, uma bandeira de
Kit de desenvolvimento ACEPIC PRO V3.0
 Kit de desenvolvimento ACEPIC PRO V3.0 O Kit de desenvolvimento ACEPIC PRO V3.0 foi desenvolvido tendo em vista a integração de vários periféricos numa só placa, evitando o uso de protoboards e facilitando
Kit de desenvolvimento ACEPIC PRO V3.0 O Kit de desenvolvimento ACEPIC PRO V3.0 foi desenvolvido tendo em vista a integração de vários periféricos numa só placa, evitando o uso de protoboards e facilitando
6. Estrutura do Programa em Assembly
 6. Estrutura do Programa em Assembly Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP A estrutura se baseia em um formato sugerido pela própria Microchip para programação da família
6. Estrutura do Programa em Assembly Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP A estrutura se baseia em um formato sugerido pela própria Microchip para programação da família
ESCOLA DE ENGENHARIA DE SÃO CARLOS USP KELEN CRISTIANE TEIXEIRA VIVALDINI AULA 3 PWM MATERIAL COMPLEMENTAR
 ESCOLA DE ENGENHARIA DE SÃO CARLOS USP KELEN CRISTIANE TEIXEIRA VIVALDINI AULA 3 PWM MATERIAL COMPLEMENTAR SÃO CARLOS 2009 LISTA DE FIGURAS Figura 01: Representação de duas formas de onda tipo PWM...5
ESCOLA DE ENGENHARIA DE SÃO CARLOS USP KELEN CRISTIANE TEIXEIRA VIVALDINI AULA 3 PWM MATERIAL COMPLEMENTAR SÃO CARLOS 2009 LISTA DE FIGURAS Figura 01: Representação de duas formas de onda tipo PWM...5
APRESENTAÇÃO DO KIT CPLD_EE01
 APRESENTAÇÃO DO KIT CPLD_EE01 O kit CPLD_EE01 foi desenvolvido para alunos de cursos técnicos, engenharia e desenvolvedores na área de circuitos digitais, o mesmo conta com alguns módulos que podem ser
APRESENTAÇÃO DO KIT CPLD_EE01 O kit CPLD_EE01 foi desenvolvido para alunos de cursos técnicos, engenharia e desenvolvedores na área de circuitos digitais, o mesmo conta com alguns módulos que podem ser
O Pino P2.7 não está sendo usado e cada Display mostrará valores de 0 a 9.
 Lista de Exercícios 2 Conceitos envolvidos: a) Interface serial RS232 b) Interface com Teclado Matricial c) Interface com Displays de 7 segmentos d) Interface com LCD e) Interface com Conversores A/D e
Lista de Exercícios 2 Conceitos envolvidos: a) Interface serial RS232 b) Interface com Teclado Matricial c) Interface com Displays de 7 segmentos d) Interface com LCD e) Interface com Conversores A/D e
Microcontroladores PIC18 - XM 118 -
 T e c n o l o g i a Microcontroladores PIC18 - XM 118 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC18 - XM 118 - INTRODUÇÃO O mundo da
T e c n o l o g i a Microcontroladores PIC18 - XM 118 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC18 - XM 118 - INTRODUÇÃO O mundo da
ET53C - SISTEMAS DIGITAIS
 ET53C - SISTEMAS DIGITAIS Conversores A/D e D/A Prof. Glauber Brante e Profa. Mariana Furucho gbrante@utfpr.edu.br e marianafurucho@utfpr.edu.br UTFPR Universidade Tecnológica Federal do Paraná DAELT Departamento
ET53C - SISTEMAS DIGITAIS Conversores A/D e D/A Prof. Glauber Brante e Profa. Mariana Furucho gbrante@utfpr.edu.br e marianafurucho@utfpr.edu.br UTFPR Universidade Tecnológica Federal do Paraná DAELT Departamento
Temporizador com PIC 12F675
 Temporizador com PIC 12F675 Vanderlei Alves S. da Silva Figura 1 Microcontrolador PIC 12F675 Os microcontroladores dominaram grande parte dos equipamentos que utilizamos em nosso dia-a-dia e assumem diversas
Temporizador com PIC 12F675 Vanderlei Alves S. da Silva Figura 1 Microcontrolador PIC 12F675 Os microcontroladores dominaram grande parte dos equipamentos que utilizamos em nosso dia-a-dia e assumem diversas
Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP. Memórias de Dados e de Programa
 4. Memórias de Dados e de Programa Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP 4.1 Memórias Semicondutoras Algumas definições Célula: Dispositivo de armazenamento de 1 bit. Palavra:
4. Memórias de Dados e de Programa Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP 4.1 Memórias Semicondutoras Algumas definições Célula: Dispositivo de armazenamento de 1 bit. Palavra:
Microprocessadores. São máquinas elétricas onde podemos armazenar instruções lógicas, aritméticas e de tomada de decisão;
 Microprocessadores São máquinas elétricas onde podemos armazenar instruções lógicas, aritméticas e de tomada de decisão; CPU (Central Processing Unit Unidade Central de Processamento) CPU (Central Processing
Microprocessadores São máquinas elétricas onde podemos armazenar instruções lógicas, aritméticas e de tomada de decisão; CPU (Central Processing Unit Unidade Central de Processamento) CPU (Central Processing
CONTROLE DE UM SERVO MOTOR
 CONTROLE DE UM SERVO MOTOR Versão 2015 RESUMO Esta experiência tem como objetivo a familiarização e o projeto de um circuito de controle simples de um servo motor. A parte experimental inclui atividades
CONTROLE DE UM SERVO MOTOR Versão 2015 RESUMO Esta experiência tem como objetivo a familiarização e o projeto de um circuito de controle simples de um servo motor. A parte experimental inclui atividades
Arquitetura e Organização de Computadores. Conjunto de Instruções da Arquitetura CompSim
 Arquitetura e Organização de Computadores Conjunto de Instruções da Arquitetura CompSim Agenda Introdução ao Arduino Arduino é: Plataforma eletrônica baseada em microcontrolador Especifcação aberta Utilizada
Arquitetura e Organização de Computadores Conjunto de Instruções da Arquitetura CompSim Agenda Introdução ao Arduino Arduino é: Plataforma eletrônica baseada em microcontrolador Especifcação aberta Utilizada
Conhecendo o PIC24 e o mikropascal
 Conhecendo o PIC24 e o mikropascal Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução Os novos microcontroladores de 16 bits da Microchip chamados de PIC24 chegam ao mercado com diversos recursos que
Conhecendo o PIC24 e o mikropascal Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução Os novos microcontroladores de 16 bits da Microchip chamados de PIC24 chegam ao mercado com diversos recursos que
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
07/06/2015. Outras características importantes em Microprocessadores/Microcontroladores SEL-433 APLICAÇÕES DE MICROPROCESSADORES I
 SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos de controle de redução de potência de operação do chip.
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos de controle de redução de potência de operação do chip.
Microprocessadores e Microcontroladores. Professor Lucas Araujo do Nascimento
 Microprocessadores e Microcontroladores Professor Lucas Araujo do Nascimento REVISÃO Microprocessadores e Microcontroladores Microprocessadores e Microcontroladores COMPUTADOR Microprocessadores e Microcontroladores
Microprocessadores e Microcontroladores Professor Lucas Araujo do Nascimento REVISÃO Microprocessadores e Microcontroladores Microprocessadores e Microcontroladores COMPUTADOR Microprocessadores e Microcontroladores
Prof. Adilson Gonzaga
 Prof. Adilson Gonzaga Outras características importantes em Microprocessadores/Microcontroladores Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos
Prof. Adilson Gonzaga Outras características importantes em Microprocessadores/Microcontroladores Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos
- Familiarizar com circuito gerador de PWM; - Verificar o funcionamento de um gerador de PWM (Modulação por Largura de Pulso).
.") 9 - Gerador de PWM Objetivos; - Familiarizar com circuito gerador de PWM; - Verificar o funcionamento de um gerador de PWM (Modulação por Largura de Pulso). Material utilizado; - Conjunto didático de sensores
9 - Gerador de PWM Objetivos; - Familiarizar com circuito gerador de PWM; - Verificar o funcionamento de um gerador de PWM (Modulação por Largura de Pulso). Material utilizado; - Conjunto didático de sensores
Guia da Placa de desenvolvimento PD Mega16 N1
 Guia da Placa de desenvolvimento PD Mega16 N1 Este tutorial consiste mostrar detalhes de hardware da placa de desenvolvimento PD Mega16 N1, necessário para iniciar a programação e testes. Boa aprendizagem...
Guia da Placa de desenvolvimento PD Mega16 N1 Este tutorial consiste mostrar detalhes de hardware da placa de desenvolvimento PD Mega16 N1, necessário para iniciar a programação e testes. Boa aprendizagem...
Microcontroladores: Programação em C
 Aula 06 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 02/04/2013 1 Microcontroladores PIC São fabricados pela Microchip Technology. PIC significa Programmabile Intelligent Computer, ou
Aula 06 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 02/04/2013 1 Microcontroladores PIC São fabricados pela Microchip Technology. PIC significa Programmabile Intelligent Computer, ou
Sistemas Microcontrolados
 Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
Sistemas Microcontrolados Aula 8: Conversores A/D e D/A Marco Jose da Silva mdasilva@utfpr.edu.br Interface com o Mundo Analógico Na realização destas aplicações, verificamos cinco elemento envolvidos.
Lista de Exercícios 2
 Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS232 c) Interrupções Lista de Exercícios 2 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS232 c) Interrupções Lista de Exercícios 2 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Apresentação da Disciplina
 CURSO: SUPERIOR DE TECNOLOGIA EM ELETRÔNICA INDUSTRIAL 1 DISCIPLINA: MICROCONTROLADORES I SEMESTRE: 4º HTTPS://SITES.GOOGLE.COM/SITE/MAURICIODEFFERT/ E-MAIL: MAURICIO.DEFFERT@GMAIL.COM Prof.Mauricio Deffert
CURSO: SUPERIOR DE TECNOLOGIA EM ELETRÔNICA INDUSTRIAL 1 DISCIPLINA: MICROCONTROLADORES I SEMESTRE: 4º HTTPS://SITES.GOOGLE.COM/SITE/MAURICIODEFFERT/ E-MAIL: MAURICIO.DEFFERT@GMAIL.COM Prof.Mauricio Deffert
Arduino Lab 02 Sensor de luminosidade e display de LCD 16 2
 Arduino Lab 02 Sensor de luminosidade e display de LCD 16 2 Display de LCD 16 2 Neste Lab, iremos descrever como conectar o sensor BH1750FVI, já citado no Lab 01, ao Arduino Micro e à um display. A indicação
Arduino Lab 02 Sensor de luminosidade e display de LCD 16 2 Display de LCD 16 2 Neste Lab, iremos descrever como conectar o sensor BH1750FVI, já citado no Lab 01, ao Arduino Micro e à um display. A indicação
Lista de Exercícios 1
 Conceitos envolvidos: a) Memória de Dados (interna e externa) b) Memória de Programa (interna e externa) c) Operações aritméticas e lógicas d) Portas e) Endereçamento a Bit f) Contadores e Temporizadores
Conceitos envolvidos: a) Memória de Dados (interna e externa) b) Memória de Programa (interna e externa) c) Operações aritméticas e lógicas d) Portas e) Endereçamento a Bit f) Contadores e Temporizadores
Mapeamento de memória e conexões do Controlador CP-WS11/4DO4DI-USB
 Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WS11/4DO4DI-USB PROXSYS Versão 1.3 Julho -2018 Controlador Industrial CP-WS1 1- Configurações
Comércio e Manutenção de Produtos Eletrônicos Manual CP-WS1 Mapeamento de memória e conexões do Controlador CP-WS11/4DO4DI-USB PROXSYS Versão 1.3 Julho -2018 Controlador Industrial CP-WS1 1- Configurações
HEXKIT F877 PLUS Manual do usuário Versão 1.0
 KITS DE APLICAÇÃO E APRENDIZADO AVANÇADO HEXKIT F877 PLUS Manual do usuário Versão 1.0 Os HEXKITS são soluções para desenvolvimento, aprendizado e prototipação rápida de projetos/produtos. Em atividades
KITS DE APLICAÇÃO E APRENDIZADO AVANÇADO HEXKIT F877 PLUS Manual do usuário Versão 1.0 Os HEXKITS são soluções para desenvolvimento, aprendizado e prototipação rápida de projetos/produtos. Em atividades
Portas de entrada e saída; Interrupções; Interrupções externas; Temporizadores Contadores; Interface Serial
 Periféricos Integrados do 8051 Portas de entrada e saída; Interrupções; Interrupções externas; Temporizadores Contadores; Interface Serial Periféricos Integrados do 8051 Portas de entrada e saída O 8051
Periféricos Integrados do 8051 Portas de entrada e saída; Interrupções; Interrupções externas; Temporizadores Contadores; Interface Serial Periféricos Integrados do 8051 Portas de entrada e saída O 8051