Automação de robôs através da plataforma arduíno
|
|
|
- Júlia Vilarinho Pinheiro
- 6 Há anos
- Visualizações:
Transcrição
1 ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS Elisângela Mazei da Silva Jader José da Silva Leonardo Scarpin Automação de robôs através da plataforma arduíno Colider
2 SUMÁRIO INTRODUÇÃO... 3 METODOLOGIA... 4 RESULTADOS E ANÁLISE DE DADOS... 5 CONCLUSÃO... 6 REFERENCIAS BIBLIOGRÁFICAS... 7 ANEXOS
3 INTRODUÇÃO O Arduíno é uma simples placa micro controlada, e um ambiente de desenvolvimento para escrever softwares para a mesma (ARDUINO, 2011). Ela com dispositivos de proteção como capacitores, diodos e resistores que evitam que possíveis erros causados por usuários inexperientes danifiquem o microcontrolador, além de possuir portas para comunicação que segue o padrão Electronic Industries Association (EIA) RS-232, que se trata de uma padronização de uma interface de comunicação entre equipamentos, disponibilizando ainda portas de entrada e saída analógicas e digitais com ou sem Modulação de Largura de Pulso em inglês Pulse Width Modulation (PWM). Sua arquitetura simples permite o controle de diversos outros hardwares através de um computador de uso pessoal (PC). Seu de ambiente de desenvolvimento, também gratuito, disponibiliza ao usuário diversos exemplos de algoritmos em C++ além das bibliotecas que auxiliam na criação de rotinas e cálculos matemáticos dentro de um algoritmo (TSUKAMOTO, 2011). O desenvolvimento da robótica na escola possibilita que os alunos, após explorarem o material, passem a utilizar sucatas eletrônicas para criarem novos robôs, tendo como plataforma de programação o Arduíno. Como demonstrou Guima citado por Quintanilha (2009), no estande do Acessa São Paulo, que ensinou passo-a-passo os visitantes a construírem uma baratinha (robô), feita com CD e lixo eletrônico. Trabalhar com robótica é construir robôs ou outros mecanismos que consigam desempenhar tarefas autonomamente, como se locomover sozinho ou levantar um objeto (Santomauro, 2008). Lieberknecht (2009, grifo do autor) define robótica como a ciência que estuda a montagem e a programação de robôs. Os robôs podem ser caracterizados como dispositivos autônomos reprogramáveis controlados por um programa de computador. Este por sua vez pode ser armazenado no próprio robô (robôs móveis), ou em um computador ao qual o robô está ligado (robô de mesa). A robótica educacional como incentivo ao ensino, visa portanto, preparar jovens e adultos para montar mecanismos robotizados simples baseados na utilização da placa Arduíno, possibilitando o desenvolvimento de habilidades em montagem e programação de robôs. 3
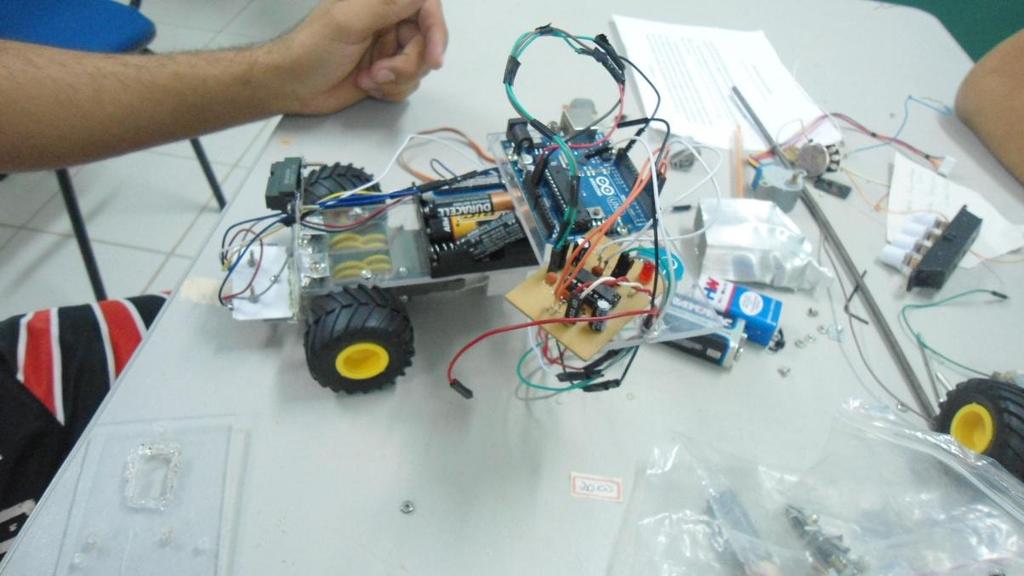
4 Este projeto tem como objetivo construir um robô autônomo seguidor de linha, estudar e entender a plataforma arduíno, trabalhar em grupo, através de competições, despertando o companheirismo, a interação, a cooperação e a capacidade de liderança dos alunos além desenvolver a organização do tempo e do espaço e participar da etapa estadual da OBR bem como da Feira de Ciências etapas municipal, estadual e nacional. A justificativa para adotar hardwares baseados na plataforma computacional livre Arduíno se deve ao seu formato que mantém sua arquitetura e demais projetos de hardware protegidos pela licença Creative Commons Attribution Share-Alike 3.0, na qual prevê direitos autorais além de permitir trabalhos derivados, tanto pessoais como comerciais desde que seja dado crédito ao Arduino e que estes trabalhos sejam enquadrados sob a mesma licença. METODOLOGIA Primeiramente observou-se os materiais disponíveis para a construção do robô, que se constituía em placa arduíno, jogo de rodas, motores, sensores de distancia e sensores seguidores de linha. Observando um protótipo de um trator autônomo, desenhou-se a estrutura do robô, que possui uma roda boba n parte traseira e rodas com rotação independentes na parte dianteira o que permite giros diferenciados para realizar curvas. Assim os alunos do EMIEP inicialmente implementaram um robô seguidor de linha utilizando materiais alternativos e a placa arduíno para automação, a fim de paarticipar da olimpíada de robótica e posteriormente dar-lhe uma emprego mais significativo. Segundo a visão de Bagnall (2007), que atribui o emprego da robótica na educação como uma ferramenta para o desenvolvimento de atividades que envolvam criar, projetar e planejar, favorecendo assim o processo de ensinoaprendizagem e ainda ampliar a integração entre diferentes áreas do conhecimento. Sugeriu-se então dar continuidade pretendendo transformar o robô em um dispositivo de salvamento para operações em áreas de difícil acesso como desmoronamentos, áreas afetadas por terremotos e outros. 4
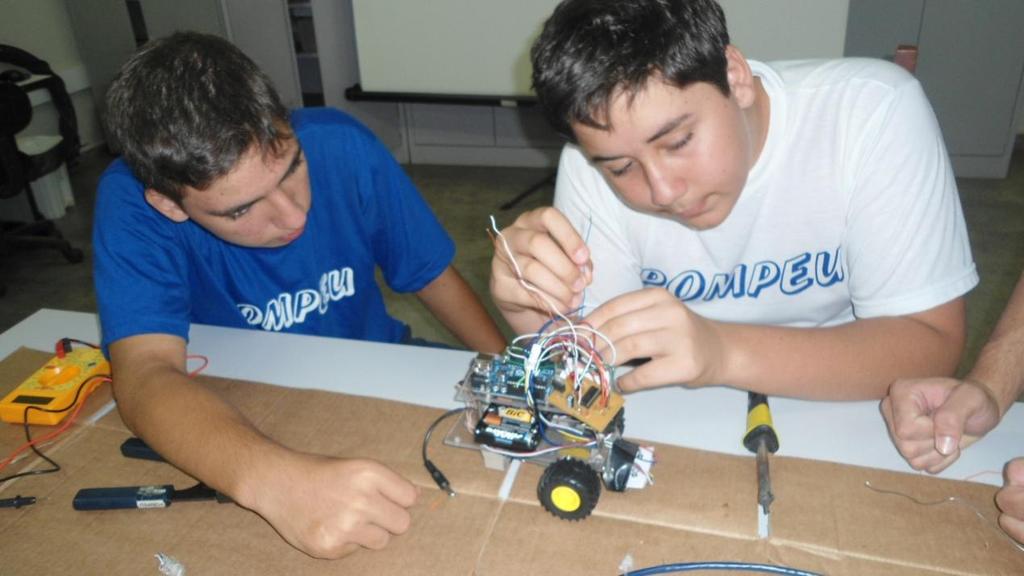
5 O material foi cedido pela UNEMAT e é mantido no laboratório de ciências da universidade, e os alunos são atendidos pela professora em horário noturno, sendo a carga horária destinada para o projeto de 4 a 8 horas semanais. Durante as aulas de robótica os alunos terão que além de construir um robô escrever um diário de bordo contando passo a passo como se construiu o robô. Dessa forma os alunos do EMIEP são estimulados na continuidade do projeto bem como levando o nome da escola e do Mato Grosso para competições de robótica. O projeto será avaliado através do número de alunos que terão os primeiros contatos com a robótica em como a suas apresentações na I Feira de Robótica e nas produções de manuais e de artigos das atividades desenvolvidas com os materiais de robótica. Comparação do desenvolvimento dos alunos e do índice de evasão do EMIEP. RESULTADOS E ANÁLISE DE DADOS Com a execução do projeto foi viabilizado uma aula com o professor da Universidade do Estado de Mato Grosso, Campus de Colíder, Me. Professor Ivan Luiz Pedroso Pires, que lecionou sobre os métodos aplicados para produção de um robô autônomo, e uma introdução a eletrônica, funcionamento de motores. Após a orientação do professor iniciou-se a montagem do motor e caixa de transferência para locomoção do robô durante a montagem surgiram imprevistos com a montagem das engrenagens, que foi resolvido desmontando uma engrenagem já pronta. Tendo o motor e caixa de transferência já prontos iniciou-se a preparação dos chassis dos carros que se optou por ser composto de 2(dois) andares para melhor alocação dos dispositivos. Para tanto foi realizado o corte das peças de acrílico que foram interligadas por um parafuso de rosca sem fim o que possibilita a alteração do espaço entre as bases caso seja necessário. Com o chassi e o módulo de locomoção prontos foi feito o encaixe e verificado a estabilidade do robô. Inicio-se um estudo detalhado do grupo para a construção de uma ponte H pois o arduíno sozinho não é capaz de alimentar os motores pois sua corrente de dreno é baixa, então foi feito um dispositivo que através de um sinal decorrente do 5
6 arduíno e uma fonte de alimentação externa, se tornando capaz de alimentar motores de até um amperes A. A montagem da ponte H foi estruturada em uma placa perfurada como transistores bipolares BD 198. Porém percebeu-se que os BD198 não conseguem suprir a corrente dos motores. A solução encontrada foi a troca do mesmo por um transistor Darlington bipolar, onde é suprida a falta de corrente ao motor. Passou então para a montagem dos periféricos, cabos, roda boba, suportes para os sensores. A montagem dos sensores para identificação de linha na parte inferior do robô, estes sensores trabalham com valores analógicos (valores analógicos são quantidades de tensões que variam linearmente ex: entre 0v e 5v pode se ter um valor de 2,5678v ou de 2,5v tendo assim um valor infinito) os sensores trabalham emitindo uma luz infravermelha, que quando chega até uma superfície branca reflete atingindo assim um sensor que as identifica e emite um sinal que levado até o arduíno que depois é interpretado. Dessa forma quando a superfície é preta a luz não reflete não chegando até o sensor que emite outro tipo de sinal ao arduíno onde é feito toda a parte de processamento e emissão do resultado na forma de movimento. Com o Robô teoricamente pronto iniciou-se a elaboração junto ao grupo de um programa para rodar no arduíno e executar as operações indicadas. O arduíno é um hardware que obedece funções que o são programados. A linguagem mais utilizada para se escrever linhas de códigos que rodem no arduíno é C++. Com o código pronto começaram os testes, ocasionando certa aflição, pois o robô não atinge a meta esperada, logo foi necessário o aperfeiçoamento código. Com o código funcionando o robô atingiu o resultado esperado. E partiu-se então para a primeira prova a Olimpíada de Robótica onde conquistou o 2º e o 3º lugar. CONCLUSÃO Com o desenvolvimento do projeto conseguiu iniciar as atividades de robótica na Escola Estadual Desembargador Milton Armando Pompeu de Barros a 6
7 experiência resultou em dois robôs seguidores de linha que participaram da Olimpíada de Robótica 2012, alcançando o 2º e 3º lugar. Também foi adquirida experiência para sugerir, melhorias no robô que continuará com a idéia de ser autônomo porém com a finalidade de ser uma tecnologia para auxilio em resgates de auto risco, como incêndios, vazamentos de gases, ou terremotos. Essas melhorias pretendem dar continuidade ao projeto no ano de 2013, proporcionando maior amplitude na aprendizagem através da robótica. REFERENCIAS BIBLIOGRÁFICAS BAGNALL, B. Maximum Lego NXT: Building Robots with Java Brains. Variant Press, MAIA, Lady Daiana O.; Silva, Vandermi J. da; Rosa, Ricardo E.V. de S.; Junior, Vicente F. de Lucena; Neto, José P. Queiroz ; A robótica como ambiente de programação utilizando o kit Lego Mindstorms. Acesso em 20 de março de QUINTANILHA, Leandro Irresistível robô, Disponível em: < Acesso em 20 de março de TSUKAMOTO, Rafael Takashi. Utilização de uma unidade de medição inercial para controle de estabilização de uma plataforma. Trabalho de conclusão de curso de Licenciatura em computação, UNEMAT, Colid/MT

8 ANEXOS 8
9 9
ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS
 1 ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS Elisângela Mazei da Silva Dyonathan Dallison Feliciano Mota Leonardo Fernandes Scarpin Tiago dos Santos Ferreira AUTOMAÇÃO DE ROBÔS DE RESGATE
1 ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS Elisângela Mazei da Silva Dyonathan Dallison Feliciano Mota Leonardo Fernandes Scarpin Tiago dos Santos Ferreira AUTOMAÇÃO DE ROBÔS DE RESGATE
POR TERRA, ÁGUA E AR:
 ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO A EDUCAÇÃO PROFISSIONALIZANTE TÉCNICO EM INFORMÁTICA ELISÂNGELA MAZEI DA SILVA LUCAS LOURENÇO
ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO A EDUCAÇÃO PROFISSIONALIZANTE TÉCNICO EM INFORMÁTICA ELISÂNGELA MAZEI DA SILVA LUCAS LOURENÇO
Introdução ao Arduino
 Projeto Pedagógico do Curso de Formação Inicial e Continuada (FIC) em Introdução ao Arduino Modalidade: presencial Projeto Pedagógico do Curso de Formação Inicial e Continuada (FIC) em Introdução ao Arduino
Projeto Pedagógico do Curso de Formação Inicial e Continuada (FIC) em Introdução ao Arduino Modalidade: presencial Projeto Pedagógico do Curso de Formação Inicial e Continuada (FIC) em Introdução ao Arduino
ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS RESUMO
 ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS Luiz F. A. RODRIGUES 1 ; Rodolfo F. BECKER 2 ; Heber R. MOREIRA 3 RESUMO Atualmente, a ciência está cada vez mais extinguindo
ESTUDO E DESENVOLVIMENTO DE UM BRAÇO ROBÓTICO VESTÍVEL UTILIZANDO LEGO MINDSTORMS Luiz F. A. RODRIGUES 1 ; Rodolfo F. BECKER 2 ; Heber R. MOREIRA 3 RESUMO Atualmente, a ciência está cada vez mais extinguindo
PARTE I - IDENTIFICAÇÃO
 Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
ESTUDO DA LINGUAGEM NXC PARA PROGRAMAÇÃO DE UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS
 ESTUDO DA LINGUAGEM NXC PARA PROGRAMAÇÃO DE UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Rachel Lima Tuma 1 José Pinheiro de Queiroz Neto 2 Diante da pouca acessibilidade quanto ao idioma, dos
ESTUDO DA LINGUAGEM NXC PARA PROGRAMAÇÃO DE UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Rachel Lima Tuma 1 José Pinheiro de Queiroz Neto 2 Diante da pouca acessibilidade quanto ao idioma, dos
Comparação entre Arduino, FPGA, ASIC e SoC
 Comparação entre Arduino, FPGA, ASIC e SoC Prof. Odilson Tadeu Valle Instituto Federal de Santa Catarina IFSC Campus São José odilson@ifsc.edu.br 1/22 Conteúdo programático 1 Arduino 2 FPGA 3 ASIC 4 SoC
Comparação entre Arduino, FPGA, ASIC e SoC Prof. Odilson Tadeu Valle Instituto Federal de Santa Catarina IFSC Campus São José odilson@ifsc.edu.br 1/22 Conteúdo programático 1 Arduino 2 FPGA 3 ASIC 4 SoC
CLUBE DE ROBÓTICA E ELETRÔNICA - ESPAÇOS MAKERS
 CLUBE DE ROBÓTICA E ELETRÔNICA - ESPAÇOS MAKERS Espaço Maker na escola RESUMO Este artigo pretende relatar os trabalhos, experiências e aprendizagens que os bolsistas do CNPq MNR, do 5º ano do ensino fundamental
CLUBE DE ROBÓTICA E ELETRÔNICA - ESPAÇOS MAKERS Espaço Maker na escola RESUMO Este artigo pretende relatar os trabalhos, experiências e aprendizagens que os bolsistas do CNPq MNR, do 5º ano do ensino fundamental
SISTEMA DE NAVEGAÇÃO PARA UM ROBÔ BASEADO EM SENSOR MAGNÉTICO
 SISTEMA DE NAVEGAÇÃO PARA UM ROBÔ BASEADO EM SENSOR MAGNÉTICO Alessandra Mayara Buso de Souza (PIBIC/CNPq-UTFPR), e-mail: alessandrabuso@hotmail.com, Marcos Vallim (Orientador), e-mail: mvallim@utfpr.edu.br.
SISTEMA DE NAVEGAÇÃO PARA UM ROBÔ BASEADO EM SENSOR MAGNÉTICO Alessandra Mayara Buso de Souza (PIBIC/CNPq-UTFPR), e-mail: alessandrabuso@hotmail.com, Marcos Vallim (Orientador), e-mail: mvallim@utfpr.edu.br.
Placa Eletrônica para Robôs Móveis
 Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
Projeto de iniciação científica Placa Eletrônica para Robôs Móveis Orientador: Flavio Tonidandel Departamento: Engenharia Elétrica Candidato: Luiz Roberto Alves Pereira N FEI: 11.206.231-0 Início: Fevereiro
Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus)
") Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
CURSO DE ROBÓTICA PARA ENSINO MÉDIO
 CURSO DE ROBÓTICA PARA ENSINO MÉDIO Autor (1): José Torres Coura Neto; Co-autor (2): Fernando Costa Fernandes Gomes; Orientador (3): Euler Cássio Tavares de Macêdo (1) Universidade Federal da Paraíba,
CURSO DE ROBÓTICA PARA ENSINO MÉDIO Autor (1): José Torres Coura Neto; Co-autor (2): Fernando Costa Fernandes Gomes; Orientador (3): Euler Cássio Tavares de Macêdo (1) Universidade Federal da Paraíba,
ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS
 CAMPUS DISTRITO ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Objetivo Geral Luan Leonardo Vieira de Moraes 1 Prof. Dr. José Pinheiro de Queiroz
CAMPUS DISTRITO ESTUDO DA TRANSFERÊNCIA AUTOMÁTICA DE DADOS PARA UM ROBÔ MÓVEL NA PLATAFORMA LEGO MINDSTORMS OBJETIVOS Objetivo Geral Luan Leonardo Vieira de Moraes 1 Prof. Dr. José Pinheiro de Queiroz
Prof. Dr. Paulo Eigi Miyagi, Coordenador Prof. Dr. José Reinaldo Silva Prof. Dr. Fabrício Junqueira Prof. Dr. Marcos Ribeiro Pereira Barretto
 PMR 3100 - Introdução à Engenharia Mecatrônica Prof. Dr. Paulo Eigi Miyagi, Coordenador Prof. Dr. José Reinaldo Silva Prof. Dr. Fabrício Junqueira Prof. Dr. Marcos Ribeiro Pereira Barretto Unidade IV:
PMR 3100 - Introdução à Engenharia Mecatrônica Prof. Dr. Paulo Eigi Miyagi, Coordenador Prof. Dr. José Reinaldo Silva Prof. Dr. Fabrício Junqueira Prof. Dr. Marcos Ribeiro Pereira Barretto Unidade IV:
PARTE I - IDENTIFICAÇÃO
 Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
ERIK LEÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS LEONARDO COSTA EX - LADDER
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO ERIK LEÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS LEONARDO COSTA EX - LADDER CURITIBA 2013 Resumo O projeto envolve
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO ERIK LEÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS LEONARDO COSTA EX - LADDER CURITIBA 2013 Resumo O projeto envolve
Sistema Experimental. Figura 40: Robô original de onde foram aproveitadas a base da estrutura de alumínio, motores, rodas e eletrônica de potência.
 73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
Trabalho desenvolvido a partir da experiência de Extensão Universitária no Projeto Física para Todos" da Unijuí. 2
 OFICINAS DE ROBÓTICA: UMA ATIVIDADE DE EXTENSÃO UNIVERSITÁRIA VINCULADA AO FÍSICA PARA TODOS 1 ROBOTICS WORKSHOPS: A UNIVERSITY EXTENSION ACTIVITY LINKED TO THE PHYSICS FOR ALL Leonardo Armando Frizzo
OFICINAS DE ROBÓTICA: UMA ATIVIDADE DE EXTENSÃO UNIVERSITÁRIA VINCULADA AO FÍSICA PARA TODOS 1 ROBOTICS WORKSHOPS: A UNIVERSITY EXTENSION ACTIVITY LINKED TO THE PHYSICS FOR ALL Leonardo Armando Frizzo
ANEXO VI TERMO DE REFERÊNCIA
 ANEXO VI TERMO DE REFERÊNCIA 1. OBJETO Aquisição dos kits de robótica educacional modelix e lego. 2. JUSTIFICATIVA Objetivo Geral: Aquisição dos kits de Robótica Educacional Modelix e Lego para a aplicação
ANEXO VI TERMO DE REFERÊNCIA 1. OBJETO Aquisição dos kits de robótica educacional modelix e lego. 2. JUSTIFICATIVA Objetivo Geral: Aquisição dos kits de Robótica Educacional Modelix e Lego para a aplicação
PARTE I - IDENTIFICAÇÃO
 Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
DESENVOLVIMENTO DE UM PROTÓTIPO MICROCONTROLADO A SER APLICADO EM OFICINAS SOBRE ROBÓTICA EDUCATIVA
 15. CONEX Resumo Expandido - ISSN 2238-9113 1 ÁREA TEMÁTICA: (marque uma das opções) ( ) COMUNICAÇÃO ( ) CULTURA ( ) DIREITOS HUMANOS E JUSTIÇA ( ) EDUCAÇÃO ( ) MEIO AMBIENTE ( ) SAÚDE ( x ) TECNOLOGIA
15. CONEX Resumo Expandido - ISSN 2238-9113 1 ÁREA TEMÁTICA: (marque uma das opções) ( ) COMUNICAÇÃO ( ) CULTURA ( ) DIREITOS HUMANOS E JUSTIÇA ( ) EDUCAÇÃO ( ) MEIO AMBIENTE ( ) SAÚDE ( x ) TECNOLOGIA
Sensores que fazem uso de ultrassons encontram uma grande gama de
 ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO A EDUCAÇÃO PROFISSIONALIZANTE TÉCNICO EM INFORMÁTICA TIAGO DOS SANTOS FERREIRA Automação Náutica
ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO A EDUCAÇÃO PROFISSIONALIZANTE TÉCNICO EM INFORMÁTICA TIAGO DOS SANTOS FERREIRA Automação Náutica
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ RESUMO
 DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Felipe Klotz 1 ; Mauro André Pagliosa 2 RESUMO Robôs autônomos estão sendo empregados em diversas tarefas onde para o
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Felipe Klotz 1 ; Mauro André Pagliosa 2 RESUMO Robôs autônomos estão sendo empregados em diversas tarefas onde para o
Congresso de Inovação, Ciência e Tecnologia do IFSP
 Congresso de Inovação, Ciência e Tecnologia do IFSP - 2016 CONTROLADOR PID APLICADO A PROGRAMAÇÃO DE ROBÔ MÓVEL THAIS JULIA BORGES RIBEIRO 1, MASAMORI KASHIWAGI 2 1 Técnico em Automação Industrial, Bolsista
Congresso de Inovação, Ciência e Tecnologia do IFSP - 2016 CONTROLADOR PID APLICADO A PROGRAMAÇÃO DE ROBÔ MÓVEL THAIS JULIA BORGES RIBEIRO 1, MASAMORI KASHIWAGI 2 1 Técnico em Automação Industrial, Bolsista
Arduino. Aula 3 motores
 Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
OFICINA DE ROBÓTICA COM ARDUINO NUMA PERSPECTIVA MULTIDISCIPLINAR DE ENSINO, APRENDIZAGEM, PESQUISA E INOVAÇÃO TECNOLÓGICA.
 OFICINA DE ROBÓTICA COM ARDUINO NUMA PERSPECTIVA MULTIDISCIPLINAR DE ENSINO, APRENDIZAGEM, PESQUISA E INOVAÇÃO TECNOLÓGICA. George Kummel Soares Figueirêdo Castro Silva* RESUMO Este relato descreve o trabalho
OFICINA DE ROBÓTICA COM ARDUINO NUMA PERSPECTIVA MULTIDISCIPLINAR DE ENSINO, APRENDIZAGEM, PESQUISA E INOVAÇÃO TECNOLÓGICA. George Kummel Soares Figueirêdo Castro Silva* RESUMO Este relato descreve o trabalho
Características técnicas Baseado no ATMega da empresa AVR, fabricante de micro-controladores em plena ascensão e concorrente do PIC Pode usar ATMega
 ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
GRADUAÇÃO EM ENGENHARIA DE COMPUTAÇÃO - EAD
 GRADUAÇÃO EM ENGENHARIA DE COMPUTAÇÃO - EAD Com o advento da indústria 4.0, há uma crescente demanda de profisisonais com habilidades de desenvolver dispositivos e softwares para as mais variadas áreas
GRADUAÇÃO EM ENGENHARIA DE COMPUTAÇÃO - EAD Com o advento da indústria 4.0, há uma crescente demanda de profisisonais com habilidades de desenvolver dispositivos e softwares para as mais variadas áreas
MATRIZ CURRICULAR BACHARELADO EM ENGENHARIA DA COMPUTAÇÃO. 1º Período
 MATRIZ CURRICULAR BACHARELADO EM ENGENHARIA DA COMPUTAÇÃO 1º Período Código Disciplina CHT 1 CHP 2 CH Total Pré-requisitos Dados I 40 40 80 - Cálculo I 80-80 - Fundamentos da Computação 40-40 - Fundamentos
MATRIZ CURRICULAR BACHARELADO EM ENGENHARIA DA COMPUTAÇÃO 1º Período Código Disciplina CHT 1 CHP 2 CH Total Pré-requisitos Dados I 40 40 80 - Cálculo I 80-80 - Fundamentos da Computação 40-40 - Fundamentos
Estimulando o Ensino da Robótica e Programação Através de Simuladores
 Estimulando o Ensino da Robótica e Programação Através de Simuladores Carlos Pena - Graduando em Engenharia da Computação - vhssa@cin.ufpe.br Victor Sabino - Mestrando em Ciência da Computação - chcp@cin.ufpe.br
Estimulando o Ensino da Robótica e Programação Através de Simuladores Carlos Pena - Graduando em Engenharia da Computação - vhssa@cin.ufpe.br Victor Sabino - Mestrando em Ciência da Computação - chcp@cin.ufpe.br
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação. Display POV
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação Display POV CURITIBA 2011 1 Fernando Brambilla de Mello Renan Passador da Silva Victor
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CCET - Centro de Ciências Exatas e de Tecnologia Engenharia de Computação Display POV CURITIBA 2011 1 Fernando Brambilla de Mello Renan Passador da Silva Victor
Introdução à Plataforma ARDUINO
 MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino. Aluna: Juliana Carolina Batista Orientadora: Joyce Martins
 ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino Aluna: Juliana Carolina Batista Orientadora: Joyce Martins Roteiro Introdução Objetivo Geral Objetivos Específicos Fundamentação
ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino Aluna: Juliana Carolina Batista Orientadora: Joyce Martins Roteiro Introdução Objetivo Geral Objetivos Específicos Fundamentação
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.1 1º PERÍODO DISCIPLINA: INTRODUÇÃO AO CÁLCULO DISCIPLINA: FUNDAMENTOS DE FÍSICA DISCIPLINA: REPRESENTAÇÃO GRÁFICA DISCIPLINA: INTRODUÇÃO À ENGENHARIA
O que você pode fazer com o Arduino
 O que é Arduino O Arduino foi criado em 2005 por um grupo de 5 pesquisadores : Massimo Banzi, David Cuartielles, Tom Igoe, Gianluca Martino e David Mellis. O objetivo era elaborar um dispositivo que fosse
O que é Arduino O Arduino foi criado em 2005 por um grupo de 5 pesquisadores : Massimo Banzi, David Cuartielles, Tom Igoe, Gianluca Martino e David Mellis. O objetivo era elaborar um dispositivo que fosse
ENGENHARIA DE COMPUTAÇÃO Bacharelado. ANEXO I - Matriz Curricular de Disciplinas- Modelo. NÚCLEO (Res CNE 11/2002) Presencial.
 Presencial.") AXO I Matriz Curricular de Disciplinas Modelo 1º SEMESTRE B.MATTRI.001 Cálculo Diferencial e Integral I B.MATTRI.002 Geometria Analítica B.ENGTRI.003 Desenho Técnico 3 7 2,2 42,7 B.ECPTRI.003 Introdução
AXO I Matriz Curricular de Disciplinas Modelo 1º SEMESTRE B.MATTRI.001 Cálculo Diferencial e Integral I B.MATTRI.002 Geometria Analítica B.ENGTRI.003 Desenho Técnico 3 7 2,2 42,7 B.ECPTRI.003 Introdução
Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW
 Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW "Este artigo tem como proposta apresentar uma plataforma para monitoramento
Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW "Este artigo tem como proposta apresentar uma plataforma para monitoramento
VEÍCULO AÉREO NÃO TRIPULADO Demonstração e apresentação do voo de um veículo de multirotor.
 ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO EDUCAÇÃO PROFISSIONAL TÉCNICO EM INFORMÁTICA JADER JOSÉ DA SILVA WESLEY MARQUES DE OLIVEIRA VEÍCULO
ESTADO DE MATO GROSSO ESCOLA ESTADUAL DESEMBARGADOR MILTON ARMANDO POMPEU DE BARROS ENSINO MÉDIO INTEGRADO EDUCAÇÃO PROFISSIONAL TÉCNICO EM INFORMÁTICA JADER JOSÉ DA SILVA WESLEY MARQUES DE OLIVEIRA VEÍCULO
COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT
 COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT Brenda Kieling Balbinotti 1 ; Marcelo Massoco Cendron 2 ; Nicole Dalmolin Kochan 3 INTRODUÇÃO A programação
COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT Brenda Kieling Balbinotti 1 ; Marcelo Massoco Cendron 2 ; Nicole Dalmolin Kochan 3 INTRODUÇÃO A programação
SISTEMA DE CONTROLE DE TEMPERATURA RESULTADOS PRÁTICOS
 SISTEMA DE CONTROLE DE TEMPERATURA RESULTADOS PRÁTICOS Jung, Felipe 1 ; Padilha, Marina 1 ; Souza, Otávio Rafael de 1 ; Balan, Renan Jr. 1 ; Fiorin, Marcos 2 ; Dequigiovani, Tiago 2 1,2 Instituto Federal
SISTEMA DE CONTROLE DE TEMPERATURA RESULTADOS PRÁTICOS Jung, Felipe 1 ; Padilha, Marina 1 ; Souza, Otávio Rafael de 1 ; Balan, Renan Jr. 1 ; Fiorin, Marcos 2 ; Dequigiovani, Tiago 2 1,2 Instituto Federal
Equipe Luar do Sertão RESUMO
 PREFEITURA MUNICIPAL DE JOÃO PESSOA SECRETARIA DE EDUCAÇÃO, CULTURA E ESPORTES - SEDEC ESCOLA MUNICIPAL DE ENSINO FUNDAMENTAL PADRE PEDRO SERRÃO End.: Av. Dom Bosco, 755. Bairro: Cristo Tel.: (83) 3218-6726
PREFEITURA MUNICIPAL DE JOÃO PESSOA SECRETARIA DE EDUCAÇÃO, CULTURA E ESPORTES - SEDEC ESCOLA MUNICIPAL DE ENSINO FUNDAMENTAL PADRE PEDRO SERRÃO End.: Av. Dom Bosco, 755. Bairro: Cristo Tel.: (83) 3218-6726
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO.
 Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
ROBÓTICA 1 INSTRUTORES: ALEXANDRE MATIAS E THALISSON RODRIGUES
 ROBÓTICA 1 INSTRUTORES: ALEXANDRE MATIAS E THALISSON RODRIGUES QUEM SOMOS? Programa de Educação Tutorial Computando Culturas em Equidade Matias: CONHECENDO OS PROFESSORES Integrante no PET-CoCE desde maio;
ROBÓTICA 1 INSTRUTORES: ALEXANDRE MATIAS E THALISSON RODRIGUES QUEM SOMOS? Programa de Educação Tutorial Computando Culturas em Equidade Matias: CONHECENDO OS PROFESSORES Integrante no PET-CoCE desde maio;
ESTUDO E DESENVOLVIMENTO DE ROBOS MÓVEIS AUTÔNOMOS PARA COMPETIÇÕES DE ROBÓTICA
 6ª Jornada Científica e Tecnológica e 3º Simpósio de Pós-Graduação do IFSULDEMINAS 04 e 05 de novembro de 2014, Pouso Alegre/MG ESTUDO E DESENVOLVIMENTO DE ROBOS MÓVEIS AUTÔNOMOS PARA COMPETIÇÕES DE ROBÓTICA
6ª Jornada Científica e Tecnológica e 3º Simpósio de Pós-Graduação do IFSULDEMINAS 04 e 05 de novembro de 2014, Pouso Alegre/MG ESTUDO E DESENVOLVIMENTO DE ROBOS MÓVEIS AUTÔNOMOS PARA COMPETIÇÕES DE ROBÓTICA
VEÍCULO SEGUIDOR DE LINHA UTILIZANDO UM MICRONTROLADOR ARDUINO
 VEÍCULO SEGUIDOR DE LINHA UTILIZANDO UM MICRONTROLADOR ARDUINO Jorge Luiz Santos Feitosa¹, Luis Thiago Gallerani Pinto 2, Vicente Marcio Cornago Junior 3, Rafael de Moraes 1, Ricardo Rall 4. ¹Graduando
VEÍCULO SEGUIDOR DE LINHA UTILIZANDO UM MICRONTROLADOR ARDUINO Jorge Luiz Santos Feitosa¹, Luis Thiago Gallerani Pinto 2, Vicente Marcio Cornago Junior 3, Rafael de Moraes 1, Ricardo Rall 4. ¹Graduando
Controle de Ventilador de Fonte de PC em Malha Aberta
 Universidade Tecnológica Federal do Paraná Campus Curitiba Departamento Acadêmico de Eletrônica Tecnologia em Mecatrônica Industrial Sistemas Microprocessados Controle de Ventilador de Fonte de PC em Malha
Universidade Tecnológica Federal do Paraná Campus Curitiba Departamento Acadêmico de Eletrônica Tecnologia em Mecatrônica Industrial Sistemas Microprocessados Controle de Ventilador de Fonte de PC em Malha
Circuitos Lógicos. Prof. Odilson Tadeu Valle
 Introdução Circuitos Lógicos Prof. Odilson Tadeu Valle Instituto Federal de Santa Catarina IFSC Campus São José odilson@ifsc.edu.br 1/44 Sumário 1 Introdução 2 Analógico Versus Digital 3 Bits, Bytes e
Introdução Circuitos Lógicos Prof. Odilson Tadeu Valle Instituto Federal de Santa Catarina IFSC Campus São José odilson@ifsc.edu.br 1/44 Sumário 1 Introdução 2 Analógico Versus Digital 3 Bits, Bytes e
A Matemática na Aprendizagem de Robótica e Programação
 A Matemática na Aprendizagem de Robótica e Programação Carlos Henrique da Costa Silva, Fábio Duarte de Oliveira, Letícia de Godoy Enz Curso Técnico de Nível Médio Integrado em Informática (7º semestre)
A Matemática na Aprendizagem de Robótica e Programação Carlos Henrique da Costa Silva, Fábio Duarte de Oliveira, Letícia de Godoy Enz Curso Técnico de Nível Médio Integrado em Informática (7º semestre)
Arduino. Introdução aos Componentes Básicos. Leonardo Mauro P. Moraes. Universidade Federal de Mato Grosso do Sul - UFMS.
 Arduino Introdução aos Básicos Leonardo Mauro P. Moraes Universidade Federal de Mato Grosso do Sul - UFMS Ponta Porã - MS 2016 1 Introdução 2 Arduino 3 4 Encerramento Introdução Arduino 1 Introdução Arduino
Arduino Introdução aos Básicos Leonardo Mauro P. Moraes Universidade Federal de Mato Grosso do Sul - UFMS Ponta Porã - MS 2016 1 Introdução 2 Arduino 3 4 Encerramento Introdução Arduino 1 Introdução Arduino
Computação Embarcada - Projeto
 Computação Embarcada - Projeto B - Detalhamento da proposta Rafael Corsi rafael.corsi@insper.edu.br 10 de março de 2017 Matheus Marotzke Engenharia da Computação INSPER 2017 INTRODUÇÂO A atividade consiste
Computação Embarcada - Projeto B - Detalhamento da proposta Rafael Corsi rafael.corsi@insper.edu.br 10 de março de 2017 Matheus Marotzke Engenharia da Computação INSPER 2017 INTRODUÇÂO A atividade consiste
Kit didático para controle de velocidade e posição de um motor de corrente contínua
 https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
PARTE I - IDENTIFICAÇÃO
 Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
Serviço Público Federal Ministério da Educação Secretaria de Educação Profissional e Tecnológica Instituto Federal de Educação, Ciência e Tecnologia de São Paulo FORMULÁRIO-SÍNTESE DA PROPOSTA - SIGProj
RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO
 RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO 1. CATEGORIA ENGENHARIA 1.2 - CAMPOS DE ATUAÇÃO PROFISSIONAL DA MODALIDADE ELÉTRICA 1.2.1 Eletricidade Aplicada e Equipamentos Eletroeletrônicos
RESOLUÇÃO N.º 1010/2005 ANEXO II MODALIDADE ELÉTRICA NIVALDO J. BOSIO 1. CATEGORIA ENGENHARIA 1.2 - CAMPOS DE ATUAÇÃO PROFISSIONAL DA MODALIDADE ELÉTRICA 1.2.1 Eletricidade Aplicada e Equipamentos Eletroeletrônicos
Trabalho Prático 0. Universidade Federal de Minas Gerais. Engenharia de Controle e Automação. Introdução a Robótica
 Universidade Federal de Minas Gerais Engenharia de Controle e Automação Introdução a Robótica Trabalho Prático 0 Felipe N. Vianna Lucas Emídio Luam Totti Belo Horizonte 2008 Objetivo: Desenvolver um dispositivo
Universidade Federal de Minas Gerais Engenharia de Controle e Automação Introdução a Robótica Trabalho Prático 0 Felipe N. Vianna Lucas Emídio Luam Totti Belo Horizonte 2008 Objetivo: Desenvolver um dispositivo
INFORMAÇÕES GERAIS DO TRABALHO
 INFORMAÇÕES GERAIS DO TRABALHO Título do Trabalho: Desenvolvimento de Módulo Didático para a Utilização em Plataforma Arduino Autor (es): Marielle Jordane da Silva, Corina Fonseca de Carvalho Macedo, Deborah
INFORMAÇÕES GERAIS DO TRABALHO Título do Trabalho: Desenvolvimento de Módulo Didático para a Utilização em Plataforma Arduino Autor (es): Marielle Jordane da Silva, Corina Fonseca de Carvalho Macedo, Deborah
Introdução. O que é o Arduino?
 Arduino 2 Introdução O que é o Arduino? Arduino é uma plataforma de desenvolvimento de hardware programável que possui um chip Atmel AVR, o qual pode variar dependendo do modelo do Arduino (podendo nos
Arduino 2 Introdução O que é o Arduino? Arduino é uma plataforma de desenvolvimento de hardware programável que possui um chip Atmel AVR, o qual pode variar dependendo do modelo do Arduino (podendo nos
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2017.2 2º PERÍODO DISCIPLINA: CÁLCULO I Estudo e aplicação de limites. Estudo e aplicação de derivadas. Estudo de soluções de problemas com utilização
Laboratório de Robótica XT 75. Preço: 998,00. Laboratório de Robótica XT-75
 Preço: 998,00 Laboratório de Robótica XT75 1/7 Esta linha é uma evolução do XT 55, que possui as mesmas características, contendo sensores diversos, controle remoto com radio frequência e microcontrolador,
Preço: 998,00 Laboratório de Robótica XT75 1/7 Esta linha é uma evolução do XT 55, que possui as mesmas características, contendo sensores diversos, controle remoto com radio frequência e microcontrolador,
CONSTRUÇÃO DE UM ROBÔ SEGUIDOR DE LINHA UTILIZANDO O KIT DE ROBÓTICA EDUCACIONAL MODELIX
 CONSTRUÇÃO DE UM ROBÔ SEGUIDOR DE LINHA UTILIZANDO O KIT DE ROBÓTICA EDUCACIONAL MODELIX Álvaro Pereira L. Filho 1,2 (2º ano do Ensino Médio), Matheus Lucas da Silva 1,2 (3º ano do Ensino Médio) Edilson
CONSTRUÇÃO DE UM ROBÔ SEGUIDOR DE LINHA UTILIZANDO O KIT DE ROBÓTICA EDUCACIONAL MODELIX Álvaro Pereira L. Filho 1,2 (2º ano do Ensino Médio), Matheus Lucas da Silva 1,2 (3º ano do Ensino Médio) Edilson
Leonardo Costa Renato Bianco APAGADOR AUTOMÁTICO
 Leonardo Costa Renato Bianco APAGADOR AUTOMÁTICO Curitiba, 2013 RESUMO O Apagador Automático, projeto feito no 3 período de Engenharia de Computação, foi desenvolvido com o propósito de limpar um quadro
Leonardo Costa Renato Bianco APAGADOR AUTOMÁTICO Curitiba, 2013 RESUMO O Apagador Automático, projeto feito no 3 período de Engenharia de Computação, foi desenvolvido com o propósito de limpar um quadro
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UFRN MAURÍCIO DE SOUZA RÊGO NETO RELATÓRIO DE ESTÁGIO OBRIGATÓRIO SUPERVISIONADO ROBOEDUC
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UFRN MAURÍCIO DE SOUZA RÊGO NETO RELATÓRIO DE ESTÁGIO OBRIGATÓRIO SUPERVISIONADO ROBOEDUC NATAL 2016 2 Sumário 1.0 LISA DE FIGURAS... 3 2.0 RESUMO... 3 3.0 DESCRIÇÃO
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE UFRN MAURÍCIO DE SOUZA RÊGO NETO RELATÓRIO DE ESTÁGIO OBRIGATÓRIO SUPERVISIONADO ROBOEDUC NATAL 2016 2 Sumário 1.0 LISA DE FIGURAS... 3 2.0 RESUMO... 3 3.0 DESCRIÇÃO
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
SERVIÇO PÚBLICO FEDERAL MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS IFMG
 Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Matriz Curricular FGGCOMP - Bacharelado em Ciência da Computação 0. Disciplinas Obrigatórias FGGCOMP.00 Cálculo I FGGELET.00 - Cálculo I / FGGMATE.00 - Cálculo Diferencial e Integral I FGGCOMP.00 Geometria
Scaling Up Inclusion: Robotics, a STEM focused Project. Centro de Formação de Associação de Escolas Paços de Ferreira, Paredes e Penafiel
 Scaling Up Inclusion: Robotics, a STEM focused Project Centro de Formação de Associação de Escolas Paços de Ferreira, Paredes e Penafiel Alberto Brochado, Eugénio Oliveira, Fernando Coelho Alberto Brochado,
Scaling Up Inclusion: Robotics, a STEM focused Project Centro de Formação de Associação de Escolas Paços de Ferreira, Paredes e Penafiel Alberto Brochado, Eugénio Oliveira, Fernando Coelho Alberto Brochado,
Guia de Práticas Elevador Didático Programável
 Guia de Práticas Elevador Didático Programável Módulo: Arduino MEGA 2560 1ªEdição Resumo Guia com as principais práticas presentes no Caderno de Práticas que acompanha o Elevador Didático Programável.
Guia de Práticas Elevador Didático Programável Módulo: Arduino MEGA 2560 1ªEdição Resumo Guia com as principais práticas presentes no Caderno de Práticas que acompanha o Elevador Didático Programável.
Ferramentas de Suporte
 Cálculo Numérico Módulo I Prof Reinaldo Haas Como estudar Métodos Numéricos? 2 Uso do método numérico Computador Programa Desenvolver Utilizar Verificar validade dos resultados obtidos 3 Programas para
Cálculo Numérico Módulo I Prof Reinaldo Haas Como estudar Métodos Numéricos? 2 Uso do método numérico Computador Programa Desenvolver Utilizar Verificar validade dos resultados obtidos 3 Programas para
DESENVOLVIMENTO DE UM LABORATÓRIO DIDÁTICO PARA ELETRÔNICA USANDO PLATAFORMA DE INSTRUMENTAÇÃO VIRTUAL COM ACESSO VIA WEB
 DESENVOLVIMENTO DE UM LABORATÓRIO DIDÁTICO PARA ELETRÔNICA USANDO PLATAFORMA DE INSTRUMENTAÇÃO VIRTUAL COM ACESSO VIA WEB OBJETIVOS Jéssica Mariella de Carvalho Oliveira (Bolsista) Ricardo Brandão Sampaio/IFAM
DESENVOLVIMENTO DE UM LABORATÓRIO DIDÁTICO PARA ELETRÔNICA USANDO PLATAFORMA DE INSTRUMENTAÇÃO VIRTUAL COM ACESSO VIA WEB OBJETIVOS Jéssica Mariella de Carvalho Oliveira (Bolsista) Ricardo Brandão Sampaio/IFAM
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
GRADE CURRICULAR E CORPO DOCENTE. Fase 1 Carga horária total: 360h
 Ciência da Computação CÂMPUS LAGES Instrumentos Regulatórios (Resolução CEPE e CONSUP ou Portaria de reconhecimento do curso pelo MEC) RESOLUÇÃO CEPE/IFSC Nº 39, DE 13 DE AGOSTO DE 2014. RESOLUÇÃO CONSUP/IFSC
Ciência da Computação CÂMPUS LAGES Instrumentos Regulatórios (Resolução CEPE e CONSUP ou Portaria de reconhecimento do curso pelo MEC) RESOLUÇÃO CEPE/IFSC Nº 39, DE 13 DE AGOSTO DE 2014. RESOLUÇÃO CONSUP/IFSC
TECNOLOGIA EDUCACIONAL
 TECNOLOGIA EDUCACIONAL CONJUNTO PARA ESTUDO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS E IHM Características Gerais Composto por hardware, software e sistema de aprendizagem tecnológica de sistemas automatizados
TECNOLOGIA EDUCACIONAL CONJUNTO PARA ESTUDO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS E IHM Características Gerais Composto por hardware, software e sistema de aprendizagem tecnológica de sistemas automatizados
Sistemas Embarcados: Arduino e PCduino
 Sistemas Embarcados: Arduino e PCduino Gabriel Reis Ruela¹ Ygor Gonçalves² Resumo Neste trabalho, apresentamos sobre sistemas embarcados, sendo mais específico nas plataformas: Arduino e PCduino. Estes
Sistemas Embarcados: Arduino e PCduino Gabriel Reis Ruela¹ Ygor Gonçalves² Resumo Neste trabalho, apresentamos sobre sistemas embarcados, sendo mais específico nas plataformas: Arduino e PCduino. Estes
Universidade Federal de Minas Gerais Colégio Técnico. Plano de Ensino. Ano: 2015
 Plano de Ensino Disciplina: Carga horária total: Eletrônica Industrial 133,3h Ano: 2015 Curso: Eletrônica Regime: Anual Série: 3 a Observação: Carga Horária Semanal Total Teórica: (horas aula por semana)
Plano de Ensino Disciplina: Carga horária total: Eletrônica Industrial 133,3h Ano: 2015 Curso: Eletrônica Regime: Anual Série: 3 a Observação: Carga Horária Semanal Total Teórica: (horas aula por semana)
Arduino Básico: As versatilidades desta plataforma na prática
 Arduino Básico: As versatilidades desta plataforma na prática Apresentação Kleber Rocha Bastos Luan Silva Santana Wellington Assunção Azevedo Graduado em Engenharia de Computação pela FAINOR Graduado em
Arduino Básico: As versatilidades desta plataforma na prática Apresentação Kleber Rocha Bastos Luan Silva Santana Wellington Assunção Azevedo Graduado em Engenharia de Computação pela FAINOR Graduado em
PROJETO: ROBÓTICA EDUCACIONAL COMO FERRAMENTA DE MOTIVAÇÃO AO ENSINO BÁSICO
 ESTADO DE MATO GROSSO SECRETARIA DE ESTADO DE EDUCAÇÃO ESCOLA ESTADUAL PRESIDENTE MÉDICI PROFªALEXANDRA MAZEI SILVA BIOLOGIA PROFª NANCY LIMA MENEZES COMPUTAÇÃO PROFº BENEDITO RIBEIRO DA SILVA NETO PROFº
ESTADO DE MATO GROSSO SECRETARIA DE ESTADO DE EDUCAÇÃO ESCOLA ESTADUAL PRESIDENTE MÉDICI PROFªALEXANDRA MAZEI SILVA BIOLOGIA PROFª NANCY LIMA MENEZES COMPUTAÇÃO PROFº BENEDITO RIBEIRO DA SILVA NETO PROFº
Sidabro automação e colégio farroupilha. ROBÓTICA No COLÉGIO Farroupilha
 Sidabro automação e colégio farroupilha ROBÓTICA No COLÉGIO Farroupilha Quando você escuta a palavra robótica, o que passa na sua cabeça? Máquinas complexas, engenheiros loucos, cálculos avançados e por
Sidabro automação e colégio farroupilha ROBÓTICA No COLÉGIO Farroupilha Quando você escuta a palavra robótica, o que passa na sua cabeça? Máquinas complexas, engenheiros loucos, cálculos avançados e por
COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT
 COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT Brenda Kieling Balbinotti 1, Nicole Dalmolin Kochan 2. Marcelo Massocco Cendron 3 Instituto Federal Catariense
COMPARATIVOS DE AMBIENTES DE PROGRAMAÇÃO GRÁFICOS PARA O KIT DE ROBÓTICA LEGO MINDSTORMS NXT Brenda Kieling Balbinotti 1, Nicole Dalmolin Kochan 2. Marcelo Massocco Cendron 3 Instituto Federal Catariense
Projeto "Broquinho" Página Oficial - Projeto Broquinho
 Projeto "Broquinho" Página Oficial - Projeto Broquinho Bernardo Bonato Brandalize - bernardo_bb@bol.com.br José Henrique Machado de Almeida - payakan@pop.com.br Kimar Arakaki Neves - d0067765@rla14.pucpr.br
Projeto "Broquinho" Página Oficial - Projeto Broquinho Bernardo Bonato Brandalize - bernardo_bb@bol.com.br José Henrique Machado de Almeida - payakan@pop.com.br Kimar Arakaki Neves - d0067765@rla14.pucpr.br
Exposição de Robótica Educacional com Hardware e Software Livres & Ciclo de Palestras Palestra
 Exposição de Robótica Educacional com Hardware e Software Livres & Ciclo de Palestras Palestra Arduino Aplicado nos Cursos Técnicos da ETPC Palestrante 1990 1992 1994 1995 1997 2000 2005 2006 2010 2010
Exposição de Robótica Educacional com Hardware e Software Livres & Ciclo de Palestras Palestra Arduino Aplicado nos Cursos Técnicos da ETPC Palestrante 1990 1992 1994 1995 1997 2000 2005 2006 2010 2010
Introdução à Programação Aula 01. Prof. Max Santana Rolemberg Farias Colegiado de Engenharia de Computação
 Introdução à Programação Aula 01 Prof. Max Santana Rolemberg Farias max.santana@univasf.edu.br Colegiado de Engenharia de Computação QUAL O OBJETIVO DA DISCIPLINA? Objetivo Tornar vocês (alunos) capazes
Introdução à Programação Aula 01 Prof. Max Santana Rolemberg Farias max.santana@univasf.edu.br Colegiado de Engenharia de Computação QUAL O OBJETIVO DA DISCIPLINA? Objetivo Tornar vocês (alunos) capazes
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO SCATMAN S DIMMER
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO SCATMAN S DIMMER CURITIBA 2010 GILBERTO YOSHIAKI YAMANOUCHI RAFAEL HENRIQUE AZANHA
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA ENGENHARIA DE COMPUTAÇÃO PROJETO SCATMAN S DIMMER CURITIBA 2010 GILBERTO YOSHIAKI YAMANOUCHI RAFAEL HENRIQUE AZANHA
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ
 DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Klotz 1, Marcus Eduardo Deckert 1, Mauro André Pagliosa 2 1. Aluno do IFC Câmpus Luzerna, curso Técnico em Automação Industrial.
DESENVOLVIMENTO DE UM ROBÔ AUTÔNOMO PARA PARTICIPAÇÃO EM COMPETIÇÃO DE SUMÔ Darlan Klotz 1, Marcus Eduardo Deckert 1, Mauro André Pagliosa 2 1. Aluno do IFC Câmpus Luzerna, curso Técnico em Automação Industrial.
LEGO Mindstorms gerando interatividade nas aulas do ensino fundamental
 LEGO Mindstorms gerando interatividade nas aulas do ensino fundamental Luiz Eduardo Martins de CARVALHO 1 ; José Felipe PEREIRA 2 ; Jonas Pereira MUNIZ 3 ; RESUMO O objetivo do presente trabalho é descrever
LEGO Mindstorms gerando interatividade nas aulas do ensino fundamental Luiz Eduardo Martins de CARVALHO 1 ; José Felipe PEREIRA 2 ; Jonas Pereira MUNIZ 3 ; RESUMO O objetivo do presente trabalho é descrever
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS º PERÍODO
 CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
CURSO: ENGENHARIA DE CONTROLE E AUTOMAÇÃO EMENTAS - 2016.2 2º PERÍODO DISCIPLINA: CÁLCULO I DISCIPLINA: FÍSICA I Estudo do centro de Massa e Momento Linear. Estudo da Rotação. Estudo de Rolamento, Torque
TÓPICOS DE INTRODUÇÃO AO LABVIEW E SUA APLICAÇÃO NA ROBÓTICA MÓVEL
 TÓPICOS DE INTRODUÇÃO AO LABVIEW E SUA APLICAÇÃO NA ROBÓTICA MÓVEL Proponente: Gabriela Lígia Reis Instituição: Universidade Federal de São João del-rei. E-mail: gabireis10@yahoo.com.br Área Temática:
TÓPICOS DE INTRODUÇÃO AO LABVIEW E SUA APLICAÇÃO NA ROBÓTICA MÓVEL Proponente: Gabriela Lígia Reis Instituição: Universidade Federal de São João del-rei. E-mail: gabireis10@yahoo.com.br Área Temática:
GRADE DE DISCIPLINAS DO CURSO Módulo 1: competências básicas
 Mecatrônica GRADE DE DISCIPLINAS DO CURSO Módulo 1: competências básicas Conteúdos Horas Presencial Matemática / Física 80 80 Desenho Técnico 40 40 Eletricidade 40 40 Circuitos Elétricos 40 40 Redes /
Mecatrônica GRADE DE DISCIPLINAS DO CURSO Módulo 1: competências básicas Conteúdos Horas Presencial Matemática / Física 80 80 Desenho Técnico 40 40 Eletricidade 40 40 Circuitos Elétricos 40 40 Redes /
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e Processos
Plano de Trabalho Docente 2016 Ensino Técnico Plano de Curso nº 95 aprovado pela portaria Cetec nº 38 de 30/10/2009 Etec Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e Processos
PERFIL PROFISSIONAL DE CONCLUSÃO DO TÉCNICO EM MECATRÔNICA
 PERFIL PROFISSIONAL DE CONCLUSÃO DO TÉCNICO EM MECATRÔNICA Competências Profissionais Competência Geral: Implementar e manter máquinas e equipamentos automatizados, bem como atuar no desenvolvimento de
PERFIL PROFISSIONAL DE CONCLUSÃO DO TÉCNICO EM MECATRÔNICA Competências Profissionais Competência Geral: Implementar e manter máquinas e equipamentos automatizados, bem como atuar no desenvolvimento de
DESENVOLVIMENTO DE PLATAFORMA DE INSTRUMENTAÇÃO UTILIZANDO ARDUÍNO
 DESENVOLVIMENTO DE PLATAFORMA DE INSTRUMENTAÇÃO UTILIZANDO ARDUÍNO MATOS, André Carlos Pereira de 1 ; LARQUER, Thiago Resende 2 ; RESUMO: Atualmente os cursos envolvendo a área de elétrica e eletrônica
DESENVOLVIMENTO DE PLATAFORMA DE INSTRUMENTAÇÃO UTILIZANDO ARDUÍNO MATOS, André Carlos Pereira de 1 ; LARQUER, Thiago Resende 2 ; RESUMO: Atualmente os cursos envolvendo a área de elétrica e eletrônica
Robótica Pedagógica: Percurso e Perspectivas
 Robótica Pedagógica: Percurso e Perspectivas João Vilhete Viegas d Abreu Universidade Estadual de Campinas - Unicamp Núcleo de Informática Aplicada à Educação - NIED jvilhete@unicamp.br Roteiro Contextualização
Robótica Pedagógica: Percurso e Perspectivas João Vilhete Viegas d Abreu Universidade Estadual de Campinas - Unicamp Núcleo de Informática Aplicada à Educação - NIED jvilhete@unicamp.br Roteiro Contextualização
ROBÓTICA EDUCACIONAL: O QUE É ROBÓTICA EDUCACIONAL E COMO PODE SER USADO NA EDUCAÇÃO?
 ROBÓTICA EDUCACIONAL: O QUE É ROBÓTICA EDUCACIONAL E COMO PODE SER USADO NA EDUCAÇÃO? Jacqueline Felipe Pereira dos Santos (1); Josinete Pereira de Carvalho (2); Mônica Domingos da Silva (3); Orientadora
ROBÓTICA EDUCACIONAL: O QUE É ROBÓTICA EDUCACIONAL E COMO PODE SER USADO NA EDUCAÇÃO? Jacqueline Felipe Pereira dos Santos (1); Josinete Pereira de Carvalho (2); Mônica Domingos da Silva (3); Orientadora
Autorização Eletrônica PESQUISA DE PREÇOS. Endereço : SIA TRECHO 02,0 LOTES SIA. Vailson Alexandre da Silva COPEC/DIAF
 1 1 18/00296 SISTEMA LEGO ROBÓTICA MINDSTORMS EV3 EDUCATION - CONJUNTO PRINCIPAL - 45544 Três servomotores interativos; Sensores de rotação e de ultrassom; Sensor de cor e de luz, sensor giroscópio e dois
1 1 18/00296 SISTEMA LEGO ROBÓTICA MINDSTORMS EV3 EDUCATION - CONJUNTO PRINCIPAL - 45544 Três servomotores interativos; Sensores de rotação e de ultrassom; Sensor de cor e de luz, sensor giroscópio e dois
PROJETO DE EXTENSÃO OBI/OBR TREINAMENTO PARA PARTICIPAÇÃO NA OLIMPÍADA BRASILEIRA DE INFORMÁTICA E OLIMPÍADA BRASILEIRA DE ROBÓTICA
 PROJETO DE EXTENSÃO OBI/OBR TREINAMENTO PARA PARTICIPAÇÃO NA OLIMPÍADA BRASILEIRA DE INFORMÁTICA E OLIMPÍADA BRASILEIRA DE ROBÓTICA Ana Karina Vieira da Silva¹ (anakarinavs@ucdb.br), Raphael Ceni Gomez¹
PROJETO DE EXTENSÃO OBI/OBR TREINAMENTO PARA PARTICIPAÇÃO NA OLIMPÍADA BRASILEIRA DE INFORMÁTICA E OLIMPÍADA BRASILEIRA DE ROBÓTICA Ana Karina Vieira da Silva¹ (anakarinavs@ucdb.br), Raphael Ceni Gomez¹
AULA 6 - INTRODUÇÃO AO ARDUINO Revisão de Eletrônica Digital e introdução aos Sistemas Computacionais.
 AULA 6 - INTRODUÇÃO AO ARDUINO Revisão de Eletrônica Digital e introdução aos Sistemas Computacionais. 6.1 Objetivo: O objetivo desta aula é mostrar aos alunos o que é e como funciona o Arduino e seus
AULA 6 - INTRODUÇÃO AO ARDUINO Revisão de Eletrônica Digital e introdução aos Sistemas Computacionais. 6.1 Objetivo: O objetivo desta aula é mostrar aos alunos o que é e como funciona o Arduino e seus
CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA
 CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA 1. INTRODUÇÃO A robótica é uma ciência que se dedica a desenvolver dispositivos capazes de realizar tarefas automaticamente empregando
CONSTRUÇÃO DE UM ROBÔ MÓVEL COMO RECURSO DIDÁTICO NOS CURSOS DE ENGENHARIA 1. INTRODUÇÃO A robótica é uma ciência que se dedica a desenvolver dispositivos capazes de realizar tarefas automaticamente empregando
Sistema de Medição de Distância
 Universidade Tecnológica Federal do Paraná Campus Curitiba Departamento Acadêmico de Eletrônica Tecnologia em Mecatrônica Industrial Sistemas Microprocessados Sistema de Medição de Distância Requisitos
Universidade Tecnológica Federal do Paraná Campus Curitiba Departamento Acadêmico de Eletrônica Tecnologia em Mecatrônica Industrial Sistemas Microprocessados Sistema de Medição de Distância Requisitos
RELATÓRIO DE ATIVIDADES PRÁTICAS EM LABORATÓRIO APRESENTAÇÃO DE PROJETOS
 Centro Universitário Católico Salesiano Auxilium Araçatuba / SP RELATÓRIO DE ATIVIDADES PRÁTICAS EM LABORATÓRIO APRESENTAÇÃO DE PROJETOS Curso: Engenharia Elétrica Termo: 7º Termo - Noturno Disciplina:
Centro Universitário Católico Salesiano Auxilium Araçatuba / SP RELATÓRIO DE ATIVIDADES PRÁTICAS EM LABORATÓRIO APRESENTAÇÃO DE PROJETOS Curso: Engenharia Elétrica Termo: 7º Termo - Noturno Disciplina:
Engenharia de Software
 Engenharia de Software Arquitetura de Computadores Prof Kleber Akio Tanaka Igor Hondo João Jakybalis Sabrina Tavera Crise do Software Quando surgiu e o que foi? - A crise do software surgiu em 1970, quando
Engenharia de Software Arquitetura de Computadores Prof Kleber Akio Tanaka Igor Hondo João Jakybalis Sabrina Tavera Crise do Software Quando surgiu e o que foi? - A crise do software surgiu em 1970, quando
REPOTENCIALIZAÇÃO DE UM AMOSTRADOR AUTOMÁTICO PARA ANÁLISES QUÍMICAS
 DQ - DEPARTAMENTO QUÍMICA REPOTENCIALIZAÇÃO DE UM AMOSTRADOR AUTOMÁTICO PARA ANÁLISES QUÍMICAS PEDRO ENRIQUE TAQUECHEL CAMPOS 1 Reinaldo Calixto de Campos 2 1 Aluno de Graduação do Curso de EAM Engenharia
DQ - DEPARTAMENTO QUÍMICA REPOTENCIALIZAÇÃO DE UM AMOSTRADOR AUTOMÁTICO PARA ANÁLISES QUÍMICAS PEDRO ENRIQUE TAQUECHEL CAMPOS 1 Reinaldo Calixto de Campos 2 1 Aluno de Graduação do Curso de EAM Engenharia