Estabilidade. Carlos Alexandre Mello. Carlos Alexandre Mello 1
|
|
|
- Sebastiana Silva Anjos
- 8 Há anos
- Visualizações:
Transcrição
1 Estabilidade Carlos Alexandre Mello 1

2 Introdução Já vimos que existem três requisitos fundamentais para projetar um sistema de controle: Resposta Transiente Estabilidade Erros de Estado Estacionário Estabilidade é a mais importante especificação de sistema Se o sistema é instável, a resposta em transiente e os erros de estado estacionário são irrelevantes 2

3 Introdução Um sistema linear e invariante no tempo é estável se a resposta natural se aproxima de zero quando o tempo tende a infinito Um sistema linear e invariante no tempo é instável se a resposta natural cresce sem limites quando o tempo tende a infinito Um sistema linear e invariante no tempo é marginalmente estável se a resposta natural nem cai e nem cresce mas permanece constante ou oscila quando o tempo tende a infinito 3

4 Introdução Assim, a definição de estabilidade implica que apenas a resposta forçada permanece à medida que a resposta natural se aproxima de zero Um sistema é dito estável se toda entrada limitada leva a uma saída limitada BIBO Bounded-Input, Bounded-Output Ou, um sistema é instável se qualquer entrada limitada leva a uma saída ilimitada Um sistema é marginalmente estável se o sistema for estável para algumas entradas limitadas e instável para outras 4

5 Introdução Lembrando nosso estudo sobre polos, polos no semi-plano esquerdo produzem respostas naturais de decaimento exponencial puro ou senóides amortecidas Essas respostas naturais tendem a zero à medida que o tempo tende a infinito Assim, se os polos de um sistema de malha fechada estiverem no semi-plano esquerdo (ou seja, têm parte real negativa), o sistema será estável 5
, o sistema será")
6 Introdução Assim, sistemas estáveis possuem funções de transferência em malha fechada com polos apenas no semi-plano da esquerda Polos no semi-plano direito produzem respostas naturais na forma de exponenciais crescentes ou senóides exponencialmente crescentes Essas respostas naturais tendem a infinito quando o tempo tende a infinito também Também, polos com multiplicidade maior que 1 no eixo imaginário levam à soma de respostas da forma At n cos(ωt+ φ), onde n = 1, 2,..., que também tendem a infinito quando o tempo tende a infinito 6
, onde n = 1, 2,.")
7 Introdução Logo, sistemas instáveis possuem funções de transferência em malha fechada com pelo menos um polo no semi-plano da direita ou polos com multiplicidade maior que 1 no eixo imaginário Por último, sistemas que têm polos no eixo imaginário com multiplicidade 1 geram oscilações senoidais puras como resposta natural Assim, sistemas marginalmente estáveis possuem funções de transferência em malha fechada com apenas polos no eixo imaginário com multiplicidade 1 e polos no semi-plano esquerdo 7

8 Introdução Exemplo 1: Observe que são os polos do sistema completo! 8

9 Introdução Exemplo 1 (cont.): 9
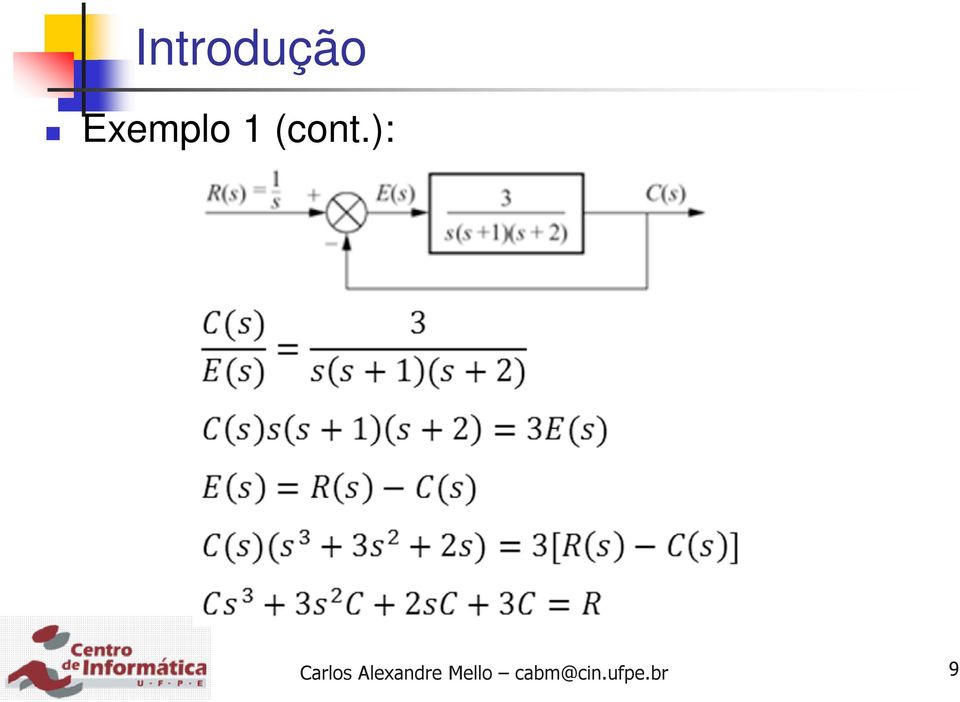
10 Introdução Exemplo 1 (cont.): Sistema equivalente R(s) C(s) Cujos polos são: >> p = [ ]; >> r = roots (p) r = i i 10
![polos são: >> p = [1 3 2 3]; >> r =](/docs-images/42/4739606/images/page_10.jpg "roots (p) r = -2.6717-0.1642 + 1.")
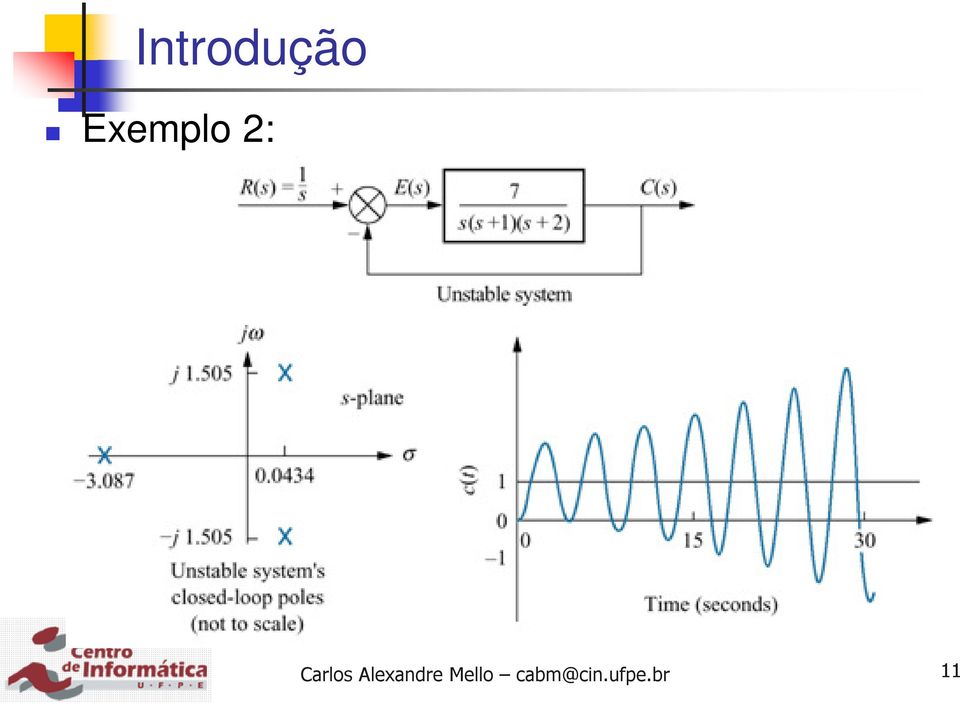
11 Introdução Exemplo 2: 11
12 Introdução Exemplo 3: Sistema original Sistema equivalente 12

13 Introdução Exemplo 3 (cont.): >> p = [ ]; >> r = roots (p) r = Sistema Estável! Polos no semi-plano esquerdo. 13

14 Introdução Exemplo 3 (cont.): >> num = [10 20]; >> den = [ ]; >> sys = tf(num, den); >> ltiview ({'pzmap'; 'step'}, sys); 14
![284 1232 1930 20]; >> sys = tf(num,](/docs-images/42/4739606/images/page_14.jpg "den); >> ltiview ({'pzmap';")
15 Introdução Analisando o polinômio do denominador, algumas pistas podem dar dicas sobre a instabilidade do sistema: Se os sinais dos coeficientes do denominador forem diferentes (houver sinais positivos e negativos), então o sistema é instável Se há algum sinal negativo, ele só pode ter sido gerado por um produto do tipo (s + a)(s a) Se potências de s forem perdidas (coeficiente igual a zero), o sistema é instável Se alguma potência tem coeficiente zero, isso quer dizer que ela foi anulada, ou seja, houve um a.s x a.s x, o que implica que houve troca de sinal (caso anterior) 15

16 Garante informação sobre a estabilidade do sistema sem precisar encontrar os polos do sistema Através dele, sabemos quantos polos existem no semi-plano direito, semi-plano esquerdo e eixo imaginário Passos: Gerar a Tabela de Routh Analisar a Tabela de Routh 16

17 Geração da Tabela de Routh Básica Considere o sistema abaixo, um sistema equivalente a função de transferência de um sistema de malha fechada: Com estamos interessados nos polos, vamos nos concentrar no polinômio do denominador e vamos criando a tabela... 17

18 Geração da Tabela de Routh Básica Polinômio: a 4 s 4 + a 3 s 3 + a 2 s 2 + a 1 s + a 0 Começamos legendando as linhas com as potências de s da maior para a menor Em seguida, comece com o coeficiente da maior potência de s e atribua ele à primeira posição da tabela (posição onde está sua potência correspondente) A próxima linha recebe o segundo maior coeficiente e as colunas vão sendo completadas alternando assim entre linhas... Adicione zero na última posição, se necessário 18

19 Geração da Tabela de Routh Básica Polinômio: a 4 s 4 + a 3 s 3 + a 2 s 2 + a 1 s + a 0 s 4 a 4 a 2 a 0 s 3 a 3 a 1 0 s 2 s 1 s 0 19

20 Geração da Tabela de Routh Básica Polinômio: a 4 s 4 + a 3 s 3 + a 2 s 2 + a 1 s + a 0 A terceira linha deve ter o mesmo número de elementos que a linha anterior Cada elemento será uma divisão onde: O denominador é o primeiro elemento da linha anterior (fixo para todos os elementos dessa linha) O numerador é o determinante das entradas das linhas anteriores, onde a primeira coluna é sempre a primeira coluna anterior; as próximas colunas seguem a sequência: Acrescentando zeros se necessário... 20

21 Geração da Tabela de Routh Básica Polinômio: a 4 s 4 + a 3 s 3 + a 2 s 2 + a 1 s + a 0 s 4 a 4 a 2 a 0 s 3 a 3 a 1 0 s 2 = 0 s 1 s 0 21
22 Geração da Tabela de Routh Básica Polinômio: a 4 s 4 + a 3 s 3 + a 2 s 2 + a 1 s + a 0 E assim por diante... s 4 a 4 a 2 a 0 s 3 a 3 a 1 0 s 2 = 0 s 1 s 0 22
23 Geração da Tabela de Routh Básica Exemplo 1: Linhas podem ser simplificadas, mas com cuidado... Uma linha pode ser toda multiplicada por uma constante (nesse caso, 1/10). MAS preserve o sinal do elemento da primeira coluna! 23
24 Geração da Tabela de Routh Básica Exemplo 1 (cont.): Observação: Observe que essa coluna foi necessária para podermos montar a segunda matriz da linha 3. Observe que esse elemento é necessário porque temos que ter o mesmo número de elementos em todas as linhas. 24
25 Interpretando a Tabela de Routh Básica Exemplo 1 (cont.): O número de raízes do polinômio que estão no semi-plano direito é igual ao número de mudanças de sinal da primeira coluna da tabela de Routh. Neste exemplo, temos duas mudanças (de 1 para -72 e de -72 para 103), assim, o sistema é instável já que existem polos no semiplano direito. 25
26 Interpretando a Tabela de Routh Básica Exemplo 2: P(s) = 3s 7 + 9s 6 + 6s 5 + 4s 4 + 7s 3 + 8s 2 + 2s
27 Interpretando a Tabela de Routh Básica Exemplo 2 (cont.): Ex: -det[3 9; 6 4]/9 27
28 Interpretando a Tabela de Routh Básica Exemplo 2 (cont.): Ex: -det[ ; ]/(-4.357) 28
29 Interpretando a Tabela de Routh Básica Exemplo 2 (cont.): Análise: Número de mudanças de sinal: 4 Há 4 polos no semi-plano direito e três no esquerdo 29
30 Casos Especiais 1) A tabela de Routh tem zero apenas na primeira coluna de uma linha Pode gerar uma divisão por zero na próxima linha Solução 1: adicionar um bias (ε): um valor muito baixo, próximo de zero, usado apenas para evitar a divisão por zero O sinal do bias pode ser positivo ou negativo; isso precisa ser analisado depois Solução 2: Uso de coeficientes reversos Fazendo s = 1/d (as raízes de d serão recíprocas às de s): 30
31 Casos Especiais 1) A tabela de Routh tem zero apenas na primeira coluna de uma linha Exemplo: 31
32 Casos Especiais 1) A tabela de Routh tem zero apenas na primeira coluna de uma linha Exemplo (cont.): Para ε positivo, temos duas mudanças de sinal, assim, o sistema tem dois polos no semi-plano direito sendo instável; Para ε negativo, temos duas mudanças de sinal também, assim, o sistema tem dois polos no semi-plano direito sendo instável. 32
33 Casos Especiais 1) A tabela de Routh tem zero apenas na primeira coluna de uma linha Exemplo (cont.): Por coeficientes reversos: D(s) = 3s 5 + 5s 4 + 6s 3 + 3s 2 + 2s
34 Casos Especiais 2) A tabela de Routh tem toda uma linha igual a zero Exemplo: 34
35 Casos Especiais 2) A tabela de Routh tem toda uma linha igual a zero Exemplo (cont.): Solução: Voltamos à linha anterior à linha nula e criamos um polinômio auxiliar formado por seus coeficientes apenas. No caso, P(s) = 1s 4 + 6s Derivamos esse polinômio: dp(s)/ds = 4s s + 0 e usamos esses coeficientes como entradas da tabela. No caso, podemos simplificá-los, dividindo por 4, ficando com 1s 3 + 3s + 0. Depois, prosseguimos normalmente... 35
36 Casos Especiais 2) A tabela de Routh tem toda uma linha igual a zero Exemplo (cont.): Como não há mudanças de sinal, o sistema não tem polos no semi-plano direito. Nada pode ser dito sobre a estabilidade ainda (veremos a seguir..). 36
37 Casos Especiais 2) A tabela de Routh tem toda uma linha igual a zero Exemplo (cont.): Por que isso aconteceu? Vamos olhar novamente o primeiro passo da Tabela: Se considerarmos a linha acima da linha nula como um polinômio, teríamos: s 4 + 6s Esse polinômio divide o polinômio original (ou seja, é um de seus fatores). Isso acontece porque há um polinômio par que divide o polinômio original. Nesse caso, acontece a linha nula. O polinômio da linha s 4 é ainda um polinômio par (só possui potências pares de s), enquanto o polinômio da linha s 5 é dito um polinômio ímpar (só possui potências ímpares de s). 37
38 Casos Especiais 2) A tabela de Routh tem toda uma linha igual a zero Exemplo 2: Denominador é s 8 + s s s s s s s + 20 (s 4 + 3s 2 +2) divide o polinômio: s 8 + s s s s s s s + 20, gerando a linha nula. 38
39 Projeto de Sistema Estável via Routh-Hurwitz Exemplo: Considere o sistema abaixo e sua função de transferência equivalente: Encontre o valor de K para que o sistema seja estável, instável ou marginalmente estável. Considere K > 0 39
40 Projeto de Sistema Estável via Routh-Hurwitz Exemplo (cont.): Tabela de Routh: Se K > 1386, teremos uma mudança de sinal por causa da terceira linha, gerando um sistema instável; Se K < 1386, todos os termos da primeira coluna serão positivos, não havendo mudança de sinal. Assim, o sistema será estável; Se K = 1386, teremos a terceira linha como nula. Isso leva à necessidade de voltar à linha anterior, derivar seu polinômio e considerá-lo assim (considerando K=1386). 40
41 Projeto de Sistema Estável via Routh-Hurwitz Exemplo (cont.): Nesse último caso, como não há mudanças de sinal do polinômio par (linha s 2 ) para baixo, o polinômio par tem suas duas raízes no eixo imaginário apenas (do contrário, por simetria, haveria raízes no semi-plano direito) Como não há mudanças de sinal acima do polinômio par também, as raízes restantes estão no semi-plano esquerdo Assim, o sistema é marginalmente estável 41
42 Estabilidade na Representação Estado-Espaço Nesse caso, como já vimos, o polinômio do denominador é dado por: det(si A), onde A é a matriz do sistema Assim, a Tabela de Routh deve ser aplicada sobre o polinômio gerado por esse determinante Exemplo: Sistema: Tabela de Routh Uma mudança de sinal Um polo no semi-plano direito Sist. Instável 42
43 Exemplo 1: s 5 + 3s 4 + 5s 3 + 4s 2 + s + 3 Polos: -1.6, -0.9±1.5j, 0.2±0.7j s s s 3 11/3 0 0 s s 1-11/4 0 0 s Duas mudanças de sinal 2 polos no SPD e, por consequência, 3 no SPE 43
44 Exemplo 2: s 5 + 6s 3 + 5s 2 + 8s + 20 Polos: 0.6±1.8j, 2j, -2j, -1.3 s s s 3 s 2 s 1 Zero na primeira coluna: Uso do polinômio reverso s 0 Obs: Já sabemos que é instável por ter um coeficiente nulo. 44
45 Exemplo 2.1: s 5 + 6s 3 + 5s 2 + 8s + 20 Polos: 0.6±1.8j, ±2j, -1.3 s I s s /2 0 II s s s s = 0 8s Linha nula 1) De s 5 até s 2, temos duas mudanças de sinal, logo, temos dois polos no SPD. Há ainda mais um polo que deve estar no SPE. 2) De s 2 até s 0, a partir do polinômio par, não houve mudanças de sinal. Logo, não há polos no SPE e nem no SPD. Temos então dois polos no eixo imaginário. 45
46 Exemplo 3: s 5 2s 4 + 3s 3-6s 2 + 2s - 4 Polos: 2, ±1.4j, ±j I s s s s 4 3s 2-2 = 0-4s 3 6s Linha nula II s 2-3/2-4/2 0 s 1-1/3 0 0 s x2 1) De s 5 até s 4, temos uma mudança de sinal, logo, temos um polo no SPD. 2) De s 4 até s 0, temos nenhuma mudança de sinal. Logo, não há polos no SPD e nem no SPE. Isso implica que temos 4 polos no eixo imaginário (obviamente, temos que ter 2 pares). 46
47 Exemplo 4: s 6 + 3s 5 + 4s 4 + 6s 3 + 5s 2 + 3s + 2 Polos: -1, -2, -j, +j, -j,+j s I s II 1 2 s s s 4 + 2s = 0 4s 3 + 4s Linha nula III s s s s = 0 2s Linha nula I: Nenhuma mudança de sinal e duas raízes (no SPE) II: Nenhuma mudança de sinal; raízes nem no SPE, nem no SPD duas no eixo imaginário III: Mesmo que o anterior. Como houve duas linhas nulas multiplicidade dupla nas raízes do eixo 47
48 Exercícios Sugeridos (Nise) Cap. 6, Problemas: 1, 2, 3, 4, 5, 6, 9, 12 No MatLab: 7, 10 48
49 A Seguir... Erros de Estado Estacionário 49
Modelagem no Domínio do Tempo. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Carlos Alexandre Mello 1 Modelagem no Domínio da Frequência A equação diferencial de um sistema é convertida em função de transferência, gerando um modelo matemático de um sistema que algebricamente relaciona
Carlos Alexandre Mello 1 Modelagem no Domínio da Frequência A equação diferencial de um sistema é convertida em função de transferência, gerando um modelo matemático de um sistema que algebricamente relaciona
AULA #12. Estabilidade de Sistemas de Controle por
 AULA #12 Estabilidade de Sistemas de Controle por Realimentação Estabilidade de Sistemas de Controle por Realimentação A presença de medidores, controladores e elementos finais de controle afetam as características
AULA #12 Estabilidade de Sistemas de Controle por Realimentação Estabilidade de Sistemas de Controle por Realimentação A presença de medidores, controladores e elementos finais de controle afetam as características
IBM1018 Física Básica II FFCLRP USP Prof. Antônio Roque Aula 6. O trabalho feito pela força para deslocar o corpo de a para b é dado por: = =
 Energia Potencial Elétrica Física I revisitada 1 Seja um corpo de massa m que se move em linha reta sob ação de uma força F que atua ao longo da linha. O trabalho feito pela força para deslocar o corpo
Energia Potencial Elétrica Física I revisitada 1 Seja um corpo de massa m que se move em linha reta sob ação de uma força F que atua ao longo da linha. O trabalho feito pela força para deslocar o corpo
O ESPAÇO NULO DE A: RESOLVENDO AX = 0 3.2
 3.2 O Espaço Nulo de A: Resolvendo Ax = 0 11 O ESPAÇO NULO DE A: RESOLVENDO AX = 0 3.2 Esta seção trata do espaço de soluções para Ax = 0. A matriz A pode ser quadrada ou retangular. Uma solução imediata
3.2 O Espaço Nulo de A: Resolvendo Ax = 0 11 O ESPAÇO NULO DE A: RESOLVENDO AX = 0 3.2 Esta seção trata do espaço de soluções para Ax = 0. A matriz A pode ser quadrada ou retangular. Uma solução imediata
Só Matemática O seu portal matemático http://www.somatematica.com.br FUNÇÕES
 FUNÇÕES O conceito de função é um dos mais importantes em toda a matemática. O conceito básico de função é o seguinte: toda vez que temos dois conjuntos e algum tipo de associação entre eles, que faça
FUNÇÕES O conceito de função é um dos mais importantes em toda a matemática. O conceito básico de função é o seguinte: toda vez que temos dois conjuntos e algum tipo de associação entre eles, que faça
ANÁLISE LINEAR DE SISTEMAS
 ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
ANÁLISE LINEAR DE SISTEMAS JOSÉ C. GEROMEL DSCE / Faculdade de Engenharia Elétrica e de Computação UNICAMP, CP 6101, 13083-970, Campinas, SP, Brasil, geromel@dsce.fee.unicamp.br Campinas, Janeiro de 2007
Departamento de Matemática - UEL - 2010. Ulysses Sodré. http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
 Matemática Essencial Extremos de funções reais Departamento de Matemática - UEL - 2010 Conteúdo Ulysses Sodré http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
Matemática Essencial Extremos de funções reais Departamento de Matemática - UEL - 2010 Conteúdo Ulysses Sodré http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
E A D - S I S T E M A S L I N E A R E S INTRODUÇÃO
 E A D - S I S T E M A S L I N E A R E S INTRODUÇÃO Dizemos que uma equação é linear, ou de primeiro grau, em certa incógnita, se o maior expoente desta variável for igual a um. Ela será quadrática, ou
E A D - S I S T E M A S L I N E A R E S INTRODUÇÃO Dizemos que uma equação é linear, ou de primeiro grau, em certa incógnita, se o maior expoente desta variável for igual a um. Ela será quadrática, ou
Capítulo 7 Medidas de dispersão
 Capítulo 7 Medidas de dispersão Introdução Para a compreensão deste capítulo, é necessário que você tenha entendido os conceitos apresentados nos capítulos 4 (ponto médio, classes e frequência) e 6 (média).
Capítulo 7 Medidas de dispersão Introdução Para a compreensão deste capítulo, é necessário que você tenha entendido os conceitos apresentados nos capítulos 4 (ponto médio, classes e frequência) e 6 (média).
x0 = 1 x n = 3x n 1 x k x k 1 Quantas são as sequências com n letras, cada uma igual a a, b ou c, de modo que não há duas letras a seguidas?
 Recorrências Muitas vezes não é possível resolver problemas de contagem diretamente combinando os princípios aditivo e multiplicativo. Para resolver esses problemas recorremos a outros recursos: as recursões
Recorrências Muitas vezes não é possível resolver problemas de contagem diretamente combinando os princípios aditivo e multiplicativo. Para resolver esses problemas recorremos a outros recursos: as recursões
Root Locus (Método do Lugar das Raízes)
") Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Múltiplos Estágios processo com três estágios Inquérito de Satisfação Fase II
 O seguinte exercício contempla um processo com três estágios. Baseia-se no Inquérito de Satisfação Fase II, sendo, por isso, essencial compreender primeiro o problema antes de começar o tutorial. 1 1.
O seguinte exercício contempla um processo com três estágios. Baseia-se no Inquérito de Satisfação Fase II, sendo, por isso, essencial compreender primeiro o problema antes de começar o tutorial. 1 1.
2 A Derivada. 2.1 Velocidade Média e Velocidade Instantânea
 2 O objetivo geral desse curso de Cálculo será o de estudar dois conceitos básicos: a Derivada e a Integral. No decorrer do curso esses dois conceitos, embora motivados de formas distintas, serão por mais
2 O objetivo geral desse curso de Cálculo será o de estudar dois conceitos básicos: a Derivada e a Integral. No decorrer do curso esses dois conceitos, embora motivados de formas distintas, serão por mais
CAPÍTULO 3 - TIPOS DE DADOS E IDENTIFICADORES
 CAPÍTULO 3 - TIPOS DE DADOS E IDENTIFICADORES 3.1 - IDENTIFICADORES Os objetos que usamos no nosso algoritmo são uma representação simbólica de um valor de dado. Assim, quando executamos a seguinte instrução:
CAPÍTULO 3 - TIPOS DE DADOS E IDENTIFICADORES 3.1 - IDENTIFICADORES Os objetos que usamos no nosso algoritmo são uma representação simbólica de um valor de dado. Assim, quando executamos a seguinte instrução:
Construção do Boxplot utilizando o Excel 2007
 1 Construção do Boxplot utilizando o Excel 2007 (1 Passo) Vamos digitar os dados na planilha. Para isso temos três banco de dados (Dados 1, Dados 2 e Dados 3), no qual irão gerar três Boxplot. Figura 1
1 Construção do Boxplot utilizando o Excel 2007 (1 Passo) Vamos digitar os dados na planilha. Para isso temos três banco de dados (Dados 1, Dados 2 e Dados 3), no qual irão gerar três Boxplot. Figura 1
Métodos de Física Teórica II Prof. Henrique Boschi IF - UFRJ. 1º. semestre de 2010 Aula 2 Ref. Butkov, cap. 8, seção 8.2
 Métodos de Física Teórica II Prof. Henrique Boschi IF - UFRJ 1º. semestre de 2010 Aula 2 Ref. Butkov, cap. 8, seção 8.2 O Método de Separação de Variáveis A ideia central desse método é supor que a solução
Métodos de Física Teórica II Prof. Henrique Boschi IF - UFRJ 1º. semestre de 2010 Aula 2 Ref. Butkov, cap. 8, seção 8.2 O Método de Separação de Variáveis A ideia central desse método é supor que a solução
Função. Definição formal: Considere dois conjuntos: o conjunto X com elementos x e o conjunto Y com elementos y. Isto é:
 Função Toda vez que temos dois conjuntos e algum tipo de associação entre eles, que faça corresponder a todo elemento do primeiro conjunto um único elemento do segundo, ocorre uma função. Definição formal:
Função Toda vez que temos dois conjuntos e algum tipo de associação entre eles, que faça corresponder a todo elemento do primeiro conjunto um único elemento do segundo, ocorre uma função. Definição formal:
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO PROGRAMA DE EDUCAÇÃO TUTORIAL - MATEMÁTICA PROJETO FUNDAMENTOS DE MATEMÁTICA ELEMENTAR
 UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO PROGRAMA DE EDUCAÇÃO TUTORIAL - MATEMÁTICA PROJETO FUNDAMENTOS DE MATEMÁTICA ELEMENTAR Assuntos: Matrizes; Matrizes Especiais; Operações com Matrizes; Operações Elementares
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO PROGRAMA DE EDUCAÇÃO TUTORIAL - MATEMÁTICA PROJETO FUNDAMENTOS DE MATEMÁTICA ELEMENTAR Assuntos: Matrizes; Matrizes Especiais; Operações com Matrizes; Operações Elementares
Resposta Transitória de Circuitos com Elementos Armazenadores de Energia
 ENG 1403 Circuitos Elétricos e Eletrônicos Resposta Transitória de Circuitos com Elementos Armazenadores de Energia Guilherme P. Temporão 1. Introdução Nas últimas duas aulas, vimos como circuitos com
ENG 1403 Circuitos Elétricos e Eletrônicos Resposta Transitória de Circuitos com Elementos Armazenadores de Energia Guilherme P. Temporão 1. Introdução Nas últimas duas aulas, vimos como circuitos com
(a 1 + a 100 ) + (a 2 + a 99 ) + (a 3 + a 98 ) +... + (a 50 + a 51 ).
 + (a 2 + a 99 ) + (a 3 + a 98 ) +... + (a 50 + a 51 ).") Questão 1. A sequência 0, 3, 7, 10, 14, 17, 21,... é formada a partir do número 0 somando-se alternadamente 3 ou 4 ao termo anterior, isto é: o primeiro termo é 0, o segundo é 3 a mais que o primeiro,
Questão 1. A sequência 0, 3, 7, 10, 14, 17, 21,... é formada a partir do número 0 somando-se alternadamente 3 ou 4 ao termo anterior, isto é: o primeiro termo é 0, o segundo é 3 a mais que o primeiro,
Título: Sistemas Lineares no CAp UFRJ: Interpretações Algébrica e Gráfica
 Autor Letícia Guimarães Rangel Co-autor(es): Fernando Celso Villar Marinho Lílian Káram Parente Cury Spiller Rita Maria Cardoso Meirelles Tipo de Pesquisa Ensino Médio Números e Operações Componente Curricular
Autor Letícia Guimarães Rangel Co-autor(es): Fernando Celso Villar Marinho Lílian Káram Parente Cury Spiller Rita Maria Cardoso Meirelles Tipo de Pesquisa Ensino Médio Números e Operações Componente Curricular
Método dos mínimos quadrados - ajuste linear
 Apêndice A Método dos mínimos quadrados - ajuste linear Ao final de uma experiência muitas vezes temos um conjunto de N medidas na forma de pares (x i, y i ). Por exemplo, imagine uma experiência em que
Apêndice A Método dos mínimos quadrados - ajuste linear Ao final de uma experiência muitas vezes temos um conjunto de N medidas na forma de pares (x i, y i ). Por exemplo, imagine uma experiência em que
Aritmética Binária e. Bernardo Nunes Gonçalves
 Aritmética Binária e Complemento a Base Bernardo Nunes Gonçalves Sumário Soma e multiplicação binária Subtração e divisão binária Representação com sinal Sinal e magnitude Complemento a base. Adição binária
Aritmética Binária e Complemento a Base Bernardo Nunes Gonçalves Sumário Soma e multiplicação binária Subtração e divisão binária Representação com sinal Sinal e magnitude Complemento a base. Adição binária
Matemática - UEL - 2010 - Compilada em 18 de Março de 2010. Prof. Ulysses Sodré Matemática Essencial: http://www.mat.uel.
 Matemática Essencial Equações do Segundo grau Conteúdo Matemática - UEL - 2010 - Compilada em 18 de Março de 2010. Prof. Ulysses Sodré Matemática Essencial: http://www.mat.uel.br/matessencial/ 1 Introdução
Matemática Essencial Equações do Segundo grau Conteúdo Matemática - UEL - 2010 - Compilada em 18 de Março de 2010. Prof. Ulysses Sodré Matemática Essencial: http://www.mat.uel.br/matessencial/ 1 Introdução
Discussão de Sistemas Teorema de Rouché Capelli
 Material by: Caio Guimarães (Equipe Rumoaoita.com) Discussão de Sistemas Teorema de Rouché Capelli Introdução: Apresentamos esse artigo para mostrar como utilizar a técnica desenvolvida a partir do Teorema
Material by: Caio Guimarães (Equipe Rumoaoita.com) Discussão de Sistemas Teorema de Rouché Capelli Introdução: Apresentamos esse artigo para mostrar como utilizar a técnica desenvolvida a partir do Teorema
IBM1018 Física Básica II FFCLRP USP Prof. Antônio Roque Aula 4
 Lei de Gauss Considere uma distribuição arbitrária de cargas ou um corpo carregado no espaço. Imagine agora uma superfície fechada qualquer envolvendo essa distribuição ou corpo. A superfície é imaginária,
Lei de Gauss Considere uma distribuição arbitrária de cargas ou um corpo carregado no espaço. Imagine agora uma superfície fechada qualquer envolvendo essa distribuição ou corpo. A superfície é imaginária,
MATERIAL MATEMÁTICA I
 MATERIAL DE MATEMÁTICA I CAPÍTULO I REVISÃO Curso: Administração 1 1. Revisão 1.1 Potência de Epoente Inteiro Seja a um número real e m e n números inteiros positivos. Podemos observar as seguintes propriedades
MATERIAL DE MATEMÁTICA I CAPÍTULO I REVISÃO Curso: Administração 1 1. Revisão 1.1 Potência de Epoente Inteiro Seja a um número real e m e n números inteiros positivos. Podemos observar as seguintes propriedades
11/07/2012. Professor Leonardo Gonsioroski FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA.
 FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
FUNDAÇÃO EDSON QUEIROZ UNIVERSIDADE DE FORTALEZA DEPARTAMENTO DE ENGENHARIA ELÉTRICA Aulas anteriores Tipos de Sinais (degrau, rampa, exponencial, contínuos, discretos) Transformadas de Fourier e suas
APLICAÇÕES DA DERIVADA
 Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Unidade 5: Sistemas de Representação
 Arquitetura e Organização de Computadores Atualização: 9/8/ Unidade 5: Sistemas de Representação Números de Ponto Flutuante IEEE 754/8 e Caracteres ASCII Prof. Daniel Caetano Objetivo: Compreender a representação
Arquitetura e Organização de Computadores Atualização: 9/8/ Unidade 5: Sistemas de Representação Números de Ponto Flutuante IEEE 754/8 e Caracteres ASCII Prof. Daniel Caetano Objetivo: Compreender a representação
Estabilizada de. PdP. Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006
 TUTORIAL Fonte Estabilizada de 5 Volts Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Fonte Estabilizada de 5 Volts Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
Somatórias e produtórias
 Capítulo 8 Somatórias e produtórias 8. Introdução Muitas quantidades importantes em matemática são definidas como a soma de uma quantidade variável de parcelas também variáveis, por exemplo a soma + +
Capítulo 8 Somatórias e produtórias 8. Introdução Muitas quantidades importantes em matemática são definidas como a soma de uma quantidade variável de parcelas também variáveis, por exemplo a soma + +
Lição 5. Instrução Programada
 Instrução Programada Lição 5 Na lição anterior, estudamos a medida da intensidade de urna corrente e verificamos que existem materiais que se comportam de modo diferente em relação à eletricidade: os condutores
Instrução Programada Lição 5 Na lição anterior, estudamos a medida da intensidade de urna corrente e verificamos que existem materiais que se comportam de modo diferente em relação à eletricidade: os condutores
2. Representação Numérica
 2. Representação Numérica 2.1 Introdução A fim se realizarmos de maneira prática qualquer operação com números, nós precisamos representa-los em uma determinada base numérica. O que isso significa? Vamos
2. Representação Numérica 2.1 Introdução A fim se realizarmos de maneira prática qualquer operação com números, nós precisamos representa-los em uma determinada base numérica. O que isso significa? Vamos
por séries de potências
 Seção 23: Resolução de equações diferenciais por séries de potências Até este ponto, quando resolvemos equações diferenciais ordinárias, nosso objetivo foi sempre encontrar as soluções expressas por meio
Seção 23: Resolução de equações diferenciais por séries de potências Até este ponto, quando resolvemos equações diferenciais ordinárias, nosso objetivo foi sempre encontrar as soluções expressas por meio
Orientação a Objetos
 Orientação a Objetos 1. Sobrecarga (Overloading) Os clientes dos bancos costumam consultar periodicamente informações relativas às suas contas. Geralmente, essas informações são obtidas através de extratos.
Orientação a Objetos 1. Sobrecarga (Overloading) Os clientes dos bancos costumam consultar periodicamente informações relativas às suas contas. Geralmente, essas informações são obtidas através de extratos.
Lição 1 - Criação de campos calculados em consultas
 1 de 5 21-08-2011 22:15 Lição 1 - Criação de campos calculados em consultas Adição de Colunas com Valores Calculados: Vamos, inicialmente, relembrar, rapidamente alguns conceitos básicos sobre Consultas
1 de 5 21-08-2011 22:15 Lição 1 - Criação de campos calculados em consultas Adição de Colunas com Valores Calculados: Vamos, inicialmente, relembrar, rapidamente alguns conceitos básicos sobre Consultas
Lista de Exercícios 4: Soluções Sequências e Indução Matemática
 UFMG/ICEx/DCC DCC Matemática Discreta Lista de Exercícios : Soluções Sequências e Indução Matemática Ciências Exatas & Engenharias o Semestre de 05 O conjunto dos números racionais Q é enumerável, ou seja,
UFMG/ICEx/DCC DCC Matemática Discreta Lista de Exercícios : Soluções Sequências e Indução Matemática Ciências Exatas & Engenharias o Semestre de 05 O conjunto dos números racionais Q é enumerável, ou seja,
Projeção ortográfica da figura plana
 A U L A Projeção ortográfica da figura plana Introdução As formas de um objeto representado em perspectiva isométrica apresentam certa deformação, isto é, não são mostradas em verdadeira grandeza, apesar
A U L A Projeção ortográfica da figura plana Introdução As formas de um objeto representado em perspectiva isométrica apresentam certa deformação, isto é, não são mostradas em verdadeira grandeza, apesar
5 Transformadas de Laplace
 5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
5 Transformadas de Laplace 5.1 Introdução às Transformadas de Laplace 4 5.2 Transformadas de Laplace definição 5 5.2 Transformadas de Laplace de sinais conhecidos 6 Sinal exponencial 6 Exemplo 5.1 7 Sinal
Sistemas de Numerações.
 Matemática Profº: Carlos Roberto da Silva; Lourival Pereira Martins. Sistema de numeração: Binário, Octal, Decimal, Hexadecimal; Sistema de numeração: Conversões; Sistemas de Numerações. Nosso sistema
Matemática Profº: Carlos Roberto da Silva; Lourival Pereira Martins. Sistema de numeração: Binário, Octal, Decimal, Hexadecimal; Sistema de numeração: Conversões; Sistemas de Numerações. Nosso sistema
AV2 - MA 12-2012. (a) De quantos modos diferentes posso empilhá-los de modo que todos os CDs de rock fiquem juntos?
 De quantos modos diferentes posso empilhá-los de modo que todos os CDs de rock fiquem juntos?") Questão 1. Num porta-cds, cabem 10 CDs colocados um sobre o outro, formando uma pilha vertical. Tenho 3 CDs de MPB, 5 de rock e 2 de música clássica. (a) De quantos modos diferentes posso empilhá-los de
Questão 1. Num porta-cds, cabem 10 CDs colocados um sobre o outro, formando uma pilha vertical. Tenho 3 CDs de MPB, 5 de rock e 2 de música clássica. (a) De quantos modos diferentes posso empilhá-los de
5 Equacionando os problemas
 A UA UL LA Equacionando os problemas Introdução Nossa aula começará com um quebra- cabeça de mesa de bar - para você tentar resolver agora. Observe esta figura feita com palitos de fósforo. Mova de lugar
A UA UL LA Equacionando os problemas Introdução Nossa aula começará com um quebra- cabeça de mesa de bar - para você tentar resolver agora. Observe esta figura feita com palitos de fósforo. Mova de lugar
Hoje estou elétrico!
 A U A UL LA Hoje estou elétrico! Ernesto, observado por Roberto, tinha acabado de construir um vetor com um pedaço de papel, um fio de meia, um canudo e um pedacinho de folha de alumínio. Enquanto testava
A U A UL LA Hoje estou elétrico! Ernesto, observado por Roberto, tinha acabado de construir um vetor com um pedaço de papel, um fio de meia, um canudo e um pedacinho de folha de alumínio. Enquanto testava
Funções algébricas do 1º grau. Maurício Bezerra Bandeira Junior
 Maurício Bezerra Bandeira Junior Definição Chama-se função polinomial do 1º grau, ou função afim, a qualquer função f de IR em IR dada por uma lei da forma f(x) = ax + b, onde a e b são números reais dados
Maurício Bezerra Bandeira Junior Definição Chama-se função polinomial do 1º grau, ou função afim, a qualquer função f de IR em IR dada por uma lei da forma f(x) = ax + b, onde a e b são números reais dados
Curvas em coordenadas polares
 1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
Microsoft Excel 2007
 Microsoft Excel 2007 O Microsoft Excel é um aplicativo para a construção e edição de planilhas eletrônicas, que permite o trabalho com: formulários, tabelas, gráficos e outros. 2.1 CONCEITOS INICIAIS:
Microsoft Excel 2007 O Microsoft Excel é um aplicativo para a construção e edição de planilhas eletrônicas, que permite o trabalho com: formulários, tabelas, gráficos e outros. 2.1 CONCEITOS INICIAIS:
Excel Planilhas Eletrônicas
 Excel Planilhas Eletrônicas Capitulo 1 O Excel é um programa de cálculos muito utilizado em empresas para controle administrativo, será utilizado também por pessoas que gostam de organizar suas contas
Excel Planilhas Eletrônicas Capitulo 1 O Excel é um programa de cálculos muito utilizado em empresas para controle administrativo, será utilizado também por pessoas que gostam de organizar suas contas
Por que o quadrado de terminados em 5 e ta o fa cil? Ex.: 15²=225, 75²=5625,...
 Por que o quadrado de terminados em 5 e ta o fa cil? Ex.: 15²=225, 75²=5625,... 0) O que veremos na aula de hoje? Um fato interessante Produtos notáveis Equação do 2º grau Como fazer a questão 5 da 3ª
Por que o quadrado de terminados em 5 e ta o fa cil? Ex.: 15²=225, 75²=5625,... 0) O que veremos na aula de hoje? Um fato interessante Produtos notáveis Equação do 2º grau Como fazer a questão 5 da 3ª
Universidade Estadual de Santa Cruz. Departamento de Ciências Exatas e Tecnológicas. Especialização em Matemática. Disciplina: Estruturas Algébricas
 1 Universidade Estadual de Santa Cruz Departamento de Ciências Exatas e Tecnológicas Especialização em Matemática Disciplina: Estruturas Algébricas Profs.: Elisangela S. Farias e Sérgio Motta Operações
1 Universidade Estadual de Santa Cruz Departamento de Ciências Exatas e Tecnológicas Especialização em Matemática Disciplina: Estruturas Algébricas Profs.: Elisangela S. Farias e Sérgio Motta Operações
94 (8,97%) 69 (6,58%) 104 (9,92%) 101 (9,64%) 22 (2,10%) 36 (3,44%) 115 (10,97%) 77 (7,35%) 39 (3,72%) 78 (7,44%) 103 (9,83%)
 69 (6,58%) 104 (9,92%) 101 (9,64%) 22 (2,10%) 36 (3,44%) 115 (10,97%) 77 (7,35%) 39 (3,72%) 78 (7,44%) 103 (9,83%)") Distribuição das 1.048 Questões do I T A 94 (8,97%) 104 (9,92%) 69 (6,58%) Equações Irracionais 09 (0,86%) Equações Exponenciais 23 (2, 101 (9,64%) Geo. Espacial Geo. Analítica Funções Conjuntos 31 (2,96%)
Distribuição das 1.048 Questões do I T A 94 (8,97%) 104 (9,92%) 69 (6,58%) Equações Irracionais 09 (0,86%) Equações Exponenciais 23 (2, 101 (9,64%) Geo. Espacial Geo. Analítica Funções Conjuntos 31 (2,96%)
I. MATEMÁTICA FINANCEIRA - ANDRÉ ARRUDA TAXAS DE JUROS. Taxas Proporcionais
 1º BLOCO...2 I. Matemática Financeira - André Arruda...2 2º BLOCO...6 I. Matemática - Daniel Lustosa...6 3º BLOCO... 10 I. Tabela de Acumulação de Capital... 10 I. MATEMÁTICA FINANCEIRA - ANDRÉ ARRUDA
1º BLOCO...2 I. Matemática Financeira - André Arruda...2 2º BLOCO...6 I. Matemática - Daniel Lustosa...6 3º BLOCO... 10 I. Tabela de Acumulação de Capital... 10 I. MATEMÁTICA FINANCEIRA - ANDRÉ ARRUDA
Utilização do SOLVER do EXCEL
 Utilização do SOLVER do EXCEL 1 Utilização do SOLVER do EXCEL José Fernando Oliveira DEEC FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO MAIO 1998 Para ilustrar a utilização do Solver na resolução de
Utilização do SOLVER do EXCEL 1 Utilização do SOLVER do EXCEL José Fernando Oliveira DEEC FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO MAIO 1998 Para ilustrar a utilização do Solver na resolução de
Conversão de Bases e Aritmética Binária
 Conversão de Bases e Aritmética Binária Prof. Glauco Amorim Sistema de Numeração Decimal Dígitos Decimais: 0 2 3 4 5 6 7 8 9 Potências de base 0 0 0 2 0 0 3 4 0 0 00 000 0 000 Sistema de Numeração Binário
Conversão de Bases e Aritmética Binária Prof. Glauco Amorim Sistema de Numeração Decimal Dígitos Decimais: 0 2 3 4 5 6 7 8 9 Potências de base 0 0 0 2 0 0 3 4 0 0 00 000 0 000 Sistema de Numeração Binário
Apresentação de Dados em Tabelas e Gráficos
 Apresentação de Dados em Tabelas e Gráficos Os dados devem ser apresentados em tabelas construídas de acordo com as normas técnicas ditadas pela Fundação Instituto Brasileiro de Geografia e Estatística
Apresentação de Dados em Tabelas e Gráficos Os dados devem ser apresentados em tabelas construídas de acordo com as normas técnicas ditadas pela Fundação Instituto Brasileiro de Geografia e Estatística
RESOLUÇÃO DAS QUESTÕES DE RACIOCÍNIO LÓGICO-MATEMÁTICO
 RESOLUÇÃO DAS QUESTÕES DE RACIOCÍNIO LÓGICO-MATEMÁTICO Caro aluno, Disponibilizo abaixo a resolução das questões de Raciocínio Lógico- Matemático das provas para os cargos de Analista do TRT/4ª Região
RESOLUÇÃO DAS QUESTÕES DE RACIOCÍNIO LÓGICO-MATEMÁTICO Caro aluno, Disponibilizo abaixo a resolução das questões de Raciocínio Lógico- Matemático das provas para os cargos de Analista do TRT/4ª Região
Exercícios Teóricos Resolvidos
 Universidade Federal de Minas Gerais Instituto de Ciências Exatas Departamento de Matemática Exercícios Teóricos Resolvidos O propósito deste texto é tentar mostrar aos alunos várias maneiras de raciocinar
Universidade Federal de Minas Gerais Instituto de Ciências Exatas Departamento de Matemática Exercícios Teóricos Resolvidos O propósito deste texto é tentar mostrar aos alunos várias maneiras de raciocinar
2 - Modelos em Controlo por Computador
 Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador 1 2 - Modelos em Controlo por Computador Objectivo: Introduzir a classe de modelos digitais que são empregues nesta disciplina
Modelação, Identificação e Controlo Digital 2-Modelos em Controlo por Computador 1 2 - Modelos em Controlo por Computador Objectivo: Introduzir a classe de modelos digitais que são empregues nesta disciplina
MAT1154 ANÁLISE QUALITATIVA DE PONTOS DE EQUILÍBRIO DE SISTEMAS NÃO-LINEARES
 MAT1154 ANÁLISE QUALITATIVA DE PONTOS DE EQUILÍBRIO DE SISTEMAS NÃO-LINEARES VERSÃO 1.0.2 Resumo. Este texto resume e complementa alguns assuntos dos Capítulo 9 do Boyce DiPrima. 1. Sistemas autônomos
MAT1154 ANÁLISE QUALITATIVA DE PONTOS DE EQUILÍBRIO DE SISTEMAS NÃO-LINEARES VERSÃO 1.0.2 Resumo. Este texto resume e complementa alguns assuntos dos Capítulo 9 do Boyce DiPrima. 1. Sistemas autônomos
Contagem I. Figura 1: Abrindo uma Porta.
 Polos Olímpicos de Treinamento Curso de Combinatória - Nível 2 Prof. Bruno Holanda Aula 4 Contagem I De quantos modos podemos nos vestir? Quantos números menores que 1000 possuem todos os algarismos pares?
Polos Olímpicos de Treinamento Curso de Combinatória - Nível 2 Prof. Bruno Holanda Aula 4 Contagem I De quantos modos podemos nos vestir? Quantos números menores que 1000 possuem todos os algarismos pares?
BOM DIA!! ÁLGEBRA. Aula 3 COM JENNYFFER LANDIM. jl.matematica@outlook.com
 BOM DIA!! ÁLGEBRA COM JENNYFFER LANDIM Aula 3 jl.matematica@outlook.com Números inteiros: operações e propriedades Adição Os termos da adição são chamadas parcelas e o resultado da operação de adição é
BOM DIA!! ÁLGEBRA COM JENNYFFER LANDIM Aula 3 jl.matematica@outlook.com Números inteiros: operações e propriedades Adição Os termos da adição são chamadas parcelas e o resultado da operação de adição é
Todos os exercícios sugeridos nesta apostila se referem ao volume 1. MATEMÁTICA I 1 FUNÇÃO DO 1º GRAU
 FUNÇÃO IDENTIDADE... FUNÇÃO LINEAR... FUNÇÃO AFIM... GRÁFICO DA FUNÇÃO DO º GRAU... IMAGEM... COEFICIENTES DA FUNÇÃO AFIM... ZERO DA FUNÇÃO AFIM... 8 FUNÇÕES CRESCENTES OU DECRESCENTES... 9 SINAL DE UMA
FUNÇÃO IDENTIDADE... FUNÇÃO LINEAR... FUNÇÃO AFIM... GRÁFICO DA FUNÇÃO DO º GRAU... IMAGEM... COEFICIENTES DA FUNÇÃO AFIM... ZERO DA FUNÇÃO AFIM... 8 FUNÇÕES CRESCENTES OU DECRESCENTES... 9 SINAL DE UMA
Soluções de Questões de Matemática do Centro Federal de Educação Tecnológica Celso Suckow da Fonseca CEFET/RJ
 Soluções de Questões de Matemática do Centro Federal de Educação Tecnológica Celso Suckow da Fonseca CEFET/RJ. Questão Sistemas de Numeração No sistema de numeração de base 2, o numeral mais simples de
Soluções de Questões de Matemática do Centro Federal de Educação Tecnológica Celso Suckow da Fonseca CEFET/RJ. Questão Sistemas de Numeração No sistema de numeração de base 2, o numeral mais simples de
6. Geometria, Primitivas e Transformações 3D
 6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
ANALÓGICA X DIGITAL. Vamos começar essa aula estabelecendo os dois tipos de eletrônica: Eletrônica Analógica. Eletrônica Digital
 ANALÓGICA X DIGITAL Vamos começar essa aula estabelecendo os dois tipos de eletrônica: Eletrônica Analógica Eletrônica Digital ANALÓGICA X DIGITAL A eletrônica analógica é caracterizada por um sinal que
ANALÓGICA X DIGITAL Vamos começar essa aula estabelecendo os dois tipos de eletrônica: Eletrônica Analógica Eletrônica Digital ANALÓGICA X DIGITAL A eletrônica analógica é caracterizada por um sinal que
Análise e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes
 Análise e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Saulo Dornellas Universidade Federal do Vale do São Francisco Juazeiro - BA Dornellas (UNIVASF) Juazeiro - BA 1 / 44 Análise do
Análise e Projeto de Sistemas de Controle pelo Método do Lugar das Raízes Saulo Dornellas Universidade Federal do Vale do São Francisco Juazeiro - BA Dornellas (UNIVASF) Juazeiro - BA 1 / 44 Análise do
4.10 Solução das Equações de Estado através da Transformada de Laplace Considere a equação de estado (4.92)
") ADL22 4.10 Solução das Equações de Estado através da Transformada de Laplace Considere a equação de estado (4.92) A transformada de Laplace fornece: (4.93) (4.94) A fim de separar X(s), substitua sx(s)
ADL22 4.10 Solução das Equações de Estado através da Transformada de Laplace Considere a equação de estado (4.92) A transformada de Laplace fornece: (4.93) (4.94) A fim de separar X(s), substitua sx(s)
a 1 x 1 +... + a n x n = b,
 Sistemas Lineares Equações Lineares Vários problemas nas áreas científica, tecnológica e econômica são modelados por sistemas de equações lineares e requerem a solução destes no menor tempo possível Definição
Sistemas Lineares Equações Lineares Vários problemas nas áreas científica, tecnológica e econômica são modelados por sistemas de equações lineares e requerem a solução destes no menor tempo possível Definição
Este material traz a teoria necessária à resolução das questões propostas.
 Inclui Teoria e Questões Inteiramente Resolvidas dos assuntos: Contagem: princípio aditivo e multiplicativo. Arranjo. Permutação. Combinação simples e com repetição. Lógica sentencial, de primeira ordem
Inclui Teoria e Questões Inteiramente Resolvidas dos assuntos: Contagem: princípio aditivo e multiplicativo. Arranjo. Permutação. Combinação simples e com repetição. Lógica sentencial, de primeira ordem
Tutorial de Matlab Francesco Franco
 Tutorial de Matlab Francesco Franco Matlab é um pacote de software que facilita a inserção de matrizes e vetores, além de facilitar a manipulação deles. A interface segue uma linguagem que é projetada
Tutorial de Matlab Francesco Franco Matlab é um pacote de software que facilita a inserção de matrizes e vetores, além de facilitar a manipulação deles. A interface segue uma linguagem que é projetada
Respostas de MAIO. A sequência é formada elevando-se ao quadrado os números 2,3,4... e somandolhes 2 em cada caso.
 Respostas de MAIO Dia 1: O menor número de ovos é 91. Dia 2: O nível da água baixa. No barquinho, a moeda desloca a mesma massa de água que a do barquinho, portanto, um volume maior que o da moeda. Na
Respostas de MAIO Dia 1: O menor número de ovos é 91. Dia 2: O nível da água baixa. No barquinho, a moeda desloca a mesma massa de água que a do barquinho, portanto, um volume maior que o da moeda. Na
Equações do segundo grau
 Módulo 1 Unidade 4 Equações do segundo grau Para início de conversa... Nesta unidade, vamos avançar um pouco mais nas resoluções de equações. Na unidade anterior, você estudou sobre as equações de primeiro
Módulo 1 Unidade 4 Equações do segundo grau Para início de conversa... Nesta unidade, vamos avançar um pouco mais nas resoluções de equações. Na unidade anterior, você estudou sobre as equações de primeiro
CURSO ONLINE RACIOCÍNIO LÓGICO
 AULA QUINZE: Matrizes & Determinantes (Parte II) Olá, amigos! Pedimos desculpas por não ter sido possível apresentarmos esta aula na semana passada. Motivos de força maior nos impediram de fazê-lo, mas
AULA QUINZE: Matrizes & Determinantes (Parte II) Olá, amigos! Pedimos desculpas por não ter sido possível apresentarmos esta aula na semana passada. Motivos de força maior nos impediram de fazê-lo, mas
Já vimos que a energia gravitacional entre duas partículas de massas m 1 e m 2, com vetores posição em r 1 e r 2, respectivamente, é dada por
 Força conservativa Já vimos que a energia gravitacional entre duas partículas de massas m 1 e m 2, com vetores posição em r 1 e r 2, respectivamente, é dada por U 12 = Gm 1m 2 r 2 r 1. Vimos também que
Força conservativa Já vimos que a energia gravitacional entre duas partículas de massas m 1 e m 2, com vetores posição em r 1 e r 2, respectivamente, é dada por U 12 = Gm 1m 2 r 2 r 1. Vimos também que
Resolução de sistemas lineares
 Resolução de sistemas lineares J M Martínez A Friedlander 1 Alguns exemplos Comecemos mostrando alguns exemplos de sistemas lineares: 3x + 2y = 5 x 2y = 1 (1) 045x 1 2x 2 + 6x 3 x 4 = 10 x 2 x 5 = 0 (2)
Resolução de sistemas lineares J M Martínez A Friedlander 1 Alguns exemplos Comecemos mostrando alguns exemplos de sistemas lineares: 3x + 2y = 5 x 2y = 1 (1) 045x 1 2x 2 + 6x 3 x 4 = 10 x 2 x 5 = 0 (2)
4Distribuição de. freqüência
 4Distribuição de freqüência O objetivo desta Unidade é partir dos dados brutos, isto é, desorganizados, para uma apresentação formal. Nesse percurso, seção 1, destacaremos a diferença entre tabela primitiva
4Distribuição de freqüência O objetivo desta Unidade é partir dos dados brutos, isto é, desorganizados, para uma apresentação formal. Nesse percurso, seção 1, destacaremos a diferença entre tabela primitiva
Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006. PdP. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
Imposto progressivo. vem inteirinho, sem nenhum imposto, e no segundo há que se pagar 15%, isto é, 165, restando apenas 935.
 Imposto progressivo Eduardo Colli Neste texto, falaremos um pouco sobre uma modalidade de tributação dos salários, adotada no Brasil, que é o Imposto de Renda com tabela progressiva. Nosso intuito é apenas
Imposto progressivo Eduardo Colli Neste texto, falaremos um pouco sobre uma modalidade de tributação dos salários, adotada no Brasil, que é o Imposto de Renda com tabela progressiva. Nosso intuito é apenas
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSFORMADAS DE LAPLACE
 INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSFORMADAS DE LAPLACE Preliminares No estudo de sistemas de controle, e comum usar-se diagramas de blocos, como o da figura 1. Diagramas de blocos podem ser utilizados
INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS TRANSFORMADAS DE LAPLACE Preliminares No estudo de sistemas de controle, e comum usar-se diagramas de blocos, como o da figura 1. Diagramas de blocos podem ser utilizados
Considerando-se a expressão trigonométrica x = 1 + cos 30, um dos possíveis produtos que a representam é igual a
 Comentadas pelo professor: Vinicius Werneck Raciocínio Lógico 1- Prova: ESAF - 2012 - Receita Federal - Auditor Fiscal da Receita Federal Sabendo-se que o conjunto X é dado por X = {x R x² 9 = 0 ou 2x
Comentadas pelo professor: Vinicius Werneck Raciocínio Lógico 1- Prova: ESAF - 2012 - Receita Federal - Auditor Fiscal da Receita Federal Sabendo-se que o conjunto X é dado por X = {x R x² 9 = 0 ou 2x
Ivan Guilhon Mitoso Rocha. As grandezas fundamentais que serão adotadas por nós daqui em frente:
 Rumo ao ITA Física Análise Dimensional Ivan Guilhon Mitoso Rocha A análise dimensional é um assunto básico que estuda as grandezas físicas em geral, com respeito a suas unidades de medida. Como as grandezas
Rumo ao ITA Física Análise Dimensional Ivan Guilhon Mitoso Rocha A análise dimensional é um assunto básico que estuda as grandezas físicas em geral, com respeito a suas unidades de medida. Como as grandezas
UTILIZAÇÃO DE RECURSOS ESTATÍSTICOS AVANÇADOS DO EXCEL PREVISÃO
 UTILIZAÇÃO DE RECURSOS ESTATÍSTICOS AVANÇADOS DO EXCEL PREVISÃO! Fazendo regressão linear! Relacionando variáveis e criando uma equação para explicá-las! Como checar se as variáveis estão relacionadas!
UTILIZAÇÃO DE RECURSOS ESTATÍSTICOS AVANÇADOS DO EXCEL PREVISÃO! Fazendo regressão linear! Relacionando variáveis e criando uma equação para explicá-las! Como checar se as variáveis estão relacionadas!
Bases Matemáticas. Aula 2 Métodos de Demonstração. Rodrigo Hausen. v. 2013-7-31 1/15
 Bases Matemáticas Aula 2 Métodos de Demonstração Rodrigo Hausen v. 2013-7-31 1/15 Como o Conhecimento Matemático é Organizado Definições Definição: um enunciado que descreve o significado de um termo.
Bases Matemáticas Aula 2 Métodos de Demonstração Rodrigo Hausen v. 2013-7-31 1/15 Como o Conhecimento Matemático é Organizado Definições Definição: um enunciado que descreve o significado de um termo.
Resumo. Sinais e Sistemas Transformada de Laplace. Resposta ao Sinal Exponencial. Transformada de Laplace
 Resumo Sinais e Sistemas Transformada de aplace lco@ist.utl.pt Instituto Superior Técnico Definição da transformada de aplace. Região de convergência. Propriedades da transformada de aplace. Sistemas caracterizados
Resumo Sinais e Sistemas Transformada de aplace lco@ist.utl.pt Instituto Superior Técnico Definição da transformada de aplace. Região de convergência. Propriedades da transformada de aplace. Sistemas caracterizados
Arquitetura de Rede de Computadores
 TCP/IP Roteamento Arquitetura de Rede de Prof. Pedro Neto Aracaju Sergipe - 2011 Ementa da Disciplina 4. Roteamento i. Máscara de Rede ii. Sub-Redes iii. Números Binários e Máscara de Sub-Rede iv. O Roteador
TCP/IP Roteamento Arquitetura de Rede de Prof. Pedro Neto Aracaju Sergipe - 2011 Ementa da Disciplina 4. Roteamento i. Máscara de Rede ii. Sub-Redes iii. Números Binários e Máscara de Sub-Rede iv. O Roteador
Portal do Projeto Tempo de Ser
 Sumário Portal do Projeto Tempo de Ser O que é um Wiki?...2 Documentos...2 Localizando documentos...3 Links...3 Criando um Documento...4 Criando um link...4 Editando um Documento...5 Sintaxe Básica...5
Sumário Portal do Projeto Tempo de Ser O que é um Wiki?...2 Documentos...2 Localizando documentos...3 Links...3 Criando um Documento...4 Criando um link...4 Editando um Documento...5 Sintaxe Básica...5
36ª Olimpíada Brasileira de Matemática GABARITO Segunda Fase
 36ª Olimpíada Brasileira de Matemática GABARITO Segunda Fase Soluções Nível 1 Segunda Fase Parte A CRITÉRIO DE CORREÇÃO: PARTE A Na parte A serão atribuídos 5 pontos para cada resposta correta e a pontuação
36ª Olimpíada Brasileira de Matemática GABARITO Segunda Fase Soluções Nível 1 Segunda Fase Parte A CRITÉRIO DE CORREÇÃO: PARTE A Na parte A serão atribuídos 5 pontos para cada resposta correta e a pontuação
Uma lei que associa mais de um valor y a um valor x é uma relação, mas não uma função. O contrário é verdadeiro (isto é, toda função é uma relação).
.") 5. FUNÇÕES DE UMA VARIÁVEL 5.1. INTRODUÇÃO Devemos compreender função como uma lei que associa um valor x pertencente a um conjunto A a um único valor y pertencente a um conjunto B, ao que denotamos por
5. FUNÇÕES DE UMA VARIÁVEL 5.1. INTRODUÇÃO Devemos compreender função como uma lei que associa um valor x pertencente a um conjunto A a um único valor y pertencente a um conjunto B, ao que denotamos por
Análise e Resolução da prova de Auditor Fiscal da Fazenda Estadual do Piauí Disciplina: Matemática Financeira Professor: Custódio Nascimento
 Análise e Resolução da prova de Auditor Fiscal da Fazenda Estadual do Piauí Disciplina: Professor: Custódio Nascimento 1- Análise da prova Neste artigo, faremos a análise das questões de cobradas na prova
Análise e Resolução da prova de Auditor Fiscal da Fazenda Estadual do Piauí Disciplina: Professor: Custódio Nascimento 1- Análise da prova Neste artigo, faremos a análise das questões de cobradas na prova
Notas de Cálculo Numérico
 Notas de Cálculo Numérico Túlio Carvalho 6 de novembro de 2002 2 Cálculo Numérico Capítulo 1 Elementos sobre erros numéricos Neste primeiro capítulo, vamos falar de uma limitação importante do cálculo
Notas de Cálculo Numérico Túlio Carvalho 6 de novembro de 2002 2 Cálculo Numérico Capítulo 1 Elementos sobre erros numéricos Neste primeiro capítulo, vamos falar de uma limitação importante do cálculo
Como consolidar dados nas planilhas utilizando o comando CONSOLIDAR do Excel
 Como consolidar dados nas planilhas utilizando o comando CONSOLIDAR do Excel! Como utilizar o comando Consolidar do Excel?! Quais são os diferenciais em relação ao cálculo aritmético normal?! Quais são
Como consolidar dados nas planilhas utilizando o comando CONSOLIDAR do Excel! Como utilizar o comando Consolidar do Excel?! Quais são os diferenciais em relação ao cálculo aritmético normal?! Quais são
p. 1/2 Resumo Especificação de Filtros Filtro de Butterworth Filtro de Chebyshev Filtros de Primeira Ordem Filtros de Segunda Ordem
 p. 1/2 Resumo Especificação de Filtros Filtro de Butterworth Filtro de Chebyshev Filtros de Primeira Ordem Filtros de Segunda Ordem Introdução Os primeiros filtros construídos eram circuitos LC passivos.
p. 1/2 Resumo Especificação de Filtros Filtro de Butterworth Filtro de Chebyshev Filtros de Primeira Ordem Filtros de Segunda Ordem Introdução Os primeiros filtros construídos eram circuitos LC passivos.
TRELIÇAS. Tipo sheed (cobertura)
") TRELIÇAS Treliças são estruturas compostas por barras com extremidades articuladas. São usadas para vários fins, entre os quais, vencer pequenos, médios e grandes vãos. Pelo fato de usar barras articuladas
TRELIÇAS Treliças são estruturas compostas por barras com extremidades articuladas. São usadas para vários fins, entre os quais, vencer pequenos, médios e grandes vãos. Pelo fato de usar barras articuladas
2aula TEORIA DE ERROS I: ALGARISMOS SIGNIFICATIVOS, ARREDONDAMENTOS E INCERTEZAS. 2.1 Algarismos Corretos e Avaliados
 2aula Janeiro de 2012 TEORIA DE ERROS I: ALGARISMOS SIGNIFICATIVOS, ARREDONDAMENTOS E INCERTEZAS Objetivos: Familiarizar o aluno com os algarismos significativos, com as regras de arredondamento e as incertezas
2aula Janeiro de 2012 TEORIA DE ERROS I: ALGARISMOS SIGNIFICATIVOS, ARREDONDAMENTOS E INCERTEZAS Objetivos: Familiarizar o aluno com os algarismos significativos, com as regras de arredondamento e as incertezas
Aula 4 Conceitos Básicos de Estatística. Aula 4 Conceitos básicos de estatística
 Aula 4 Conceitos Básicos de Estatística Aula 4 Conceitos básicos de estatística A Estatística é a ciência de aprendizagem a partir de dados. Trata-se de uma disciplina estratégica, que coleta, analisa
Aula 4 Conceitos Básicos de Estatística Aula 4 Conceitos básicos de estatística A Estatística é a ciência de aprendizagem a partir de dados. Trata-se de uma disciplina estratégica, que coleta, analisa
Unidade II MATEMÁTICA APLICADA. Profa. Maria Ester Domingues de Oliveira
 Unidade II MATEMÁTICA APLICADA À CONTABILIDADE Profa. Maria Ester Domingues de Oliveira Receita Total A receita é o valor em moeda que o produtor recebe pela venda de x unidades do produto produzido e
Unidade II MATEMÁTICA APLICADA À CONTABILIDADE Profa. Maria Ester Domingues de Oliveira Receita Total A receita é o valor em moeda que o produtor recebe pela venda de x unidades do produto produzido e
Capítulo 04. Geradores Elétricos. 1. Definição. 2. Força Eletromotriz (fem) de um Gerador. 3. Resistência interna do gerador
 de um Gerador. 3. Resistência interna do gerador") 1. Definição Denominamos gerador elétrico todo dispositivo capaz de transformar energia não elétrica em energia elétrica. 2. Força Eletromotriz (fem) de um Gerador Para os geradores usuais, a potência
1. Definição Denominamos gerador elétrico todo dispositivo capaz de transformar energia não elétrica em energia elétrica. 2. Força Eletromotriz (fem) de um Gerador Para os geradores usuais, a potência
TEORIA DOS CONJUNTOS Símbolos
 1 MATERIAL DE APOIO MATEMÁTICA Turmas 1º AS e 1º PD Profº Carlos Roberto da Silva A Matemática apresenta invenções tão sutis que poderão servir não só para satisfazer os curiosos como, também para auxiliar
1 MATERIAL DE APOIO MATEMÁTICA Turmas 1º AS e 1º PD Profº Carlos Roberto da Silva A Matemática apresenta invenções tão sutis que poderão servir não só para satisfazer os curiosos como, também para auxiliar