GEM15-Dinâmica de Máquinas
|
|
|
- Miguel Porto Angelim
- 10 Há anos
- Visualizações:
Transcrição
1 Universidade Federal de Uberlândia Faculdade de Engenharia Mecânica Fundamentos De Dinâmica De Veículos GEM15-Dinâmica de Máquinas Professor: Marcelo Braga dos Santos

2 Capitulo 1 Conceitos de Cinemática e Dinâmica Aplicados às Máquinas

3 1- Introdução à Cinemática e Dinâmica de Máquinas e Componentes 1.1- Considerações ü Importância do estudo dos mecanismos => Presença nas máquinas; ü Mecanismo => É um conjunto de elementos de máquinas ligados de forma a produzir um movimento específico; ü Máquina => Um (ou mais) mecanismo(s) que transmite(m) força de uma fonte de potência a uma resistência a ser superada;
 mecanismo(s) que transmite(m) força de uma fonte de")
4 ü Projeto de uma máquina Cinemática: - Posição velocidade e aceleração; - Função do sistema => Obtenção do movimento correto. Dinâmica: - Cinemática + forças (geradas ou fornecidas) envolvidas no funcionamento; - Inércia e potência. Resistência: - Esforços => Integridade do sistema; - Dimensionamento e seleção de materiais. Modernamente: CAD => Multicorpos (otimização) => FEM (otimização)

5 1.2- Tipos de Mecanismos ü Sistemas articulados Cursor biela - manivela; *Peça 1 => Suporte ou base => Bloco; *Peça 2 => Manivela => Virabrequim; *Peça 3 => Biela => Biela; *Peça 4 => Cursor => Pistão.

6 ü Aplicação

7 ü Came/Seguidor Came => Elemento mecânico usado para acionar um seguidor; O acionamento é feito por meio de contato direto; Mecanismo compacto; Aparece em muitas máquinas; Aplicação:

8 Exemplo 1: Forma típica (came de disco com seguidor radial de face plana) - Came + seguidor; - Velocidade constante; - Elevação => Excêntrico; - Retorno => Gravidade, mola, came => Velocidade; - Eixo comando de válvulas de motores.

9 Exemplo 2: Came tridimensional - Movimento do seguidor => Rotação e movimento Axial; - Comando de válvulas variável.

10 Exemplo 3: Came de retorno comandado - Comando de válvulas desmodrômico => DUCATTI; - Retorno forçado => Não permite flutuação; - Precisão e desgaste afetam o funcionamento.

11 ü Engrenagens Elemento mecânico dentado; Muito usadas para transmitir movimento angular; Projetadas para proporcionar razão de velocidade constante; Contato direto dos dentes; Algumas configurações possíveis (exemplos).

12

13 ü Trens de engrenagens Necessário quando a redução desejada é grande. Divisão da redução: - Necessidade cinemática; - Restrição construtiva.

14 1.4 Definições importantes ü Ciclo do movimento Partindo da posição inicial; Passagem por todas as posições intermediárias; Retorno à posição inicial. ü Período : Tempo necessário para completar um ciclo. ü Fase: Posições relativas de um mecanismo em um determinado instante. ü Pares de elementos: - Forma geométrica pela qual as peças de um mecanismo são articuladas; - Conexões.

15 ü Peça: - Corpo rígido que possui 2 ou mais conexões; - Função: Transmitir força e movimento às demais peças.

16 Exemplo: Motor em estrela
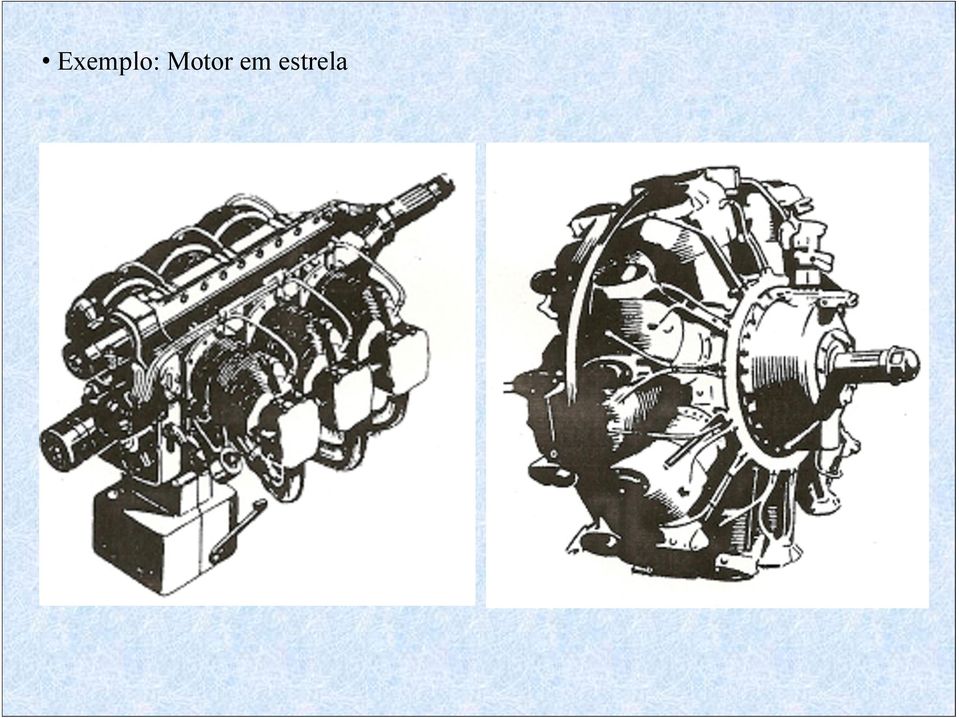
17

18 1.5- Atualidade do estudo e exemplos de aplicações práticas ü Máquinas modernas => Mecanismos clássicos ü Engrenagens => Câmbio de Fórmula 1 ü Câmbio automático / hidramático ü Sistema articulados Mecanismo de 4 barras => Motor alternativo de combustão interna;

19

20 Vídeo Motor 4 Tempos
21 ü Correias Uno selecta - 45 HP e 9Kgfm Nissan CVT - Motor 2.0 e 20Kgfm Mini-Baja UFU - 10 HP
22 ü Correias
23 CVT Toroidal
24
25 ü Trens de engrenagens planetárias Diferenciais de automóvel - Diferencial simples - Diferencial auto-blocante
26
27
28
29 ü Redutores para aeronaves
30 ü Redutores para aeronaves
31 ü Honda VTEC - Comando de válvulas variável; - Atua na admissão e escape simultaneamente; - Altera o tempo de permanência e cruzamento das válvulas; - Usado nos motores de Fórmula 1.
32
33
34
35
36
37 ü Rotores de câmara ü Motor Wankel - Figura => Funcionamento do motor Wankel; - Proporciona elevada potência com um volume reduzido; - Principal problema: Estanqueidade e durabilidade dos vedadores; - Exemplos...
38
39 - Exemplo 2: Mazda RX7 => Potência específica de 196 CV/l - Ótimo desempenho e durabilidade elevada;
40 Compressor de lóbulos ou compressor Roots - Sobrealimentação de motores (MAD MAX); - Acionamento mecânico (correia, corrente ou engrenagens); - Baixa pressão associada a elevada vazão (Blower ou soprador).
41 Ford Falcon MAD MAX
42 Compressor de espiral - Sobrealimentação de motores; - Acionamento mecânico; - Ex:. Volkswagen Corrado.
43
44
45
46 Compressor de parafuso - Principais usos => Compressor de ar ou sobre alimentação de motores; - Proporciona alta pressão e elevada vazão; - Extremamente confiável para uso contínuo; - Ex. 1: Hospital de clínicas da UFU; - Ex.2: Mercedes-Benz 230 Kompressor (Classe C, SLK ou CLK); Kompressor => 193CV; Aspirado => 197 CV.
47
48 1.3- Tipos de Movimentos ü Movimento plano Translação: Quando uma reta pertencente ao corpo permanece sempre paralela a si mesma. Translação retilínea: Todos os pontos do corpo tem trajetórias retas paralelas.
49 - Ex: Peça B => Movimento alternativo
50 Translação curvilínea: As trajetórias são curvas idênticas e paralelas. - Ex: Peça 3
51 Rotação: Cada ponto do corpo rígido permanece a uma distância constante de um eixo fixo normal ao plano do movimento. Oscilação: Rotação alternada de um ângulo determinado. Translação e rotação combinados: - Exemplo: -Peça 2 => Rotação - Peça 4 => Oscilação - Peça 3 => Translação e rotação combinadas
52 ü Movimento helicoidal Rotação em torno de um eixo fixo; Translação paralela a este eixo; Exemplo: Porca sendo atarraxada em um parafuso. ü Movimento esférico Todos os pontos do corpo giram em torno de um ponto fixo; Distância deste ponto é mantida constante; Exemplo: Terminal de direção de automóveis.
53 ü Cadeia cinemática Conjunto de peças ligadas por articulações; Ausência de movimento relativo => Estrutura; Cadeia restrita => Movimento relativo entre as peças é único; Cadeia restrita + Peça fixa = Mecanismo. ü Inversão de um mecanismo Alteração da peça fixa; Movimento relativo entre peças permanece inalterado; Movimentos absolutos diferentes.
54
55 ü Transmissão de movimento Contato direto => Ex: Came/seguidor e dentes de engrenagens; Por elemento intermediário => Ex: Biela; Através de uma ligação flexível => Ex: Correia, corrente ou cabo.
56 ü Exemplo 1
57 ü Exemplo 1
58 Consideremos o dispositivo no qual tem-se: Came 2 e Seguidor 3 Contato no ponto P A came 2 gira no sentido horário Considerando P sobre a peça 2 => Vetor velocidade tangencial => PM 2 O 2 P
59 NN => Normal comum passando por P => Linha de ação (ou transmissão) da força TT => Tangente comum A velocidade PM 2 pode ser decomposta em: - PN => Ao longo da normal comum - Pt 2 => Ao longo da tangente comum
60 Uma vez que existe contato: PN (considerando P na peça 2) = PN (considerando P na peça 3) Conhecendo PN e o raio O 3 P pode-se determinar o vetor velocidade tangencial PM 3 O 3 P
61 Conhecido PM 3 pode-se obter a velocidade de rotação do seguidor: V= ω.r Cálculo da velocidade de deslizamento: Neste caso observa-se que: Pt 2 e Pt 3 tem direção contrária, logo Velocidade deslizamento= /Pt 2 / +/Pt 3 / = Pt 2 + Pt 3 ( se eles tivessem a mesma direção seria a diferença)
62 Se o ponto de contato estiver sobre a linha de centros: - PM 2 e PM 3 serão iguais => mesma direção => Velocidade de deslizamento = 0 - Condição para que haja rolamento puro => Ponto de contato permaneça sobre a linha de centros
63 Para o mecanismo em questão: - Combinação de rolamento e deslizamento - Rolamento puro => P sobre a linha de centros => Não é possível pela configuração física do problema, proporção das peças
64 De outra maneira... e Ao dividir uma equação pela outra =>
65 Traçando duas retas perpendiculares à normal comum N N e passando por O 2 e O 3, obtém-se O 2 e e O 3 f Os triângulos PM 2 N e O 2 Pe são semelhantes, portanto:
66 Os triângulos PM 3 n e O 3 Pf também são semelhantes, assim:
67 - Substituindo em (1)... Logo: Existem mais de 2 triângulos semelhantes => O 2 Ke e O 3 Kf, assim:
68 Substituindo em (2)...
69 ü Conclusão Para superfícies curvas em contato direto, as velocidades angulares são inversamente proporcionais aos segmentos determinados na linha de centro por sua interseção com a normal comum (linha de ação da força). Para haver uma razão de velocidade angular constante, a normal comum deve cruzar a linha de centros em um ponto fixo.
70 ü Exemplo 2 Provar que, para o mecanismo mostrado a velocidade angular da peça conduzida e condutora são inversamente proporcionais aos seguimentos determinados na linha de centro por sua interseção com a linha de transmissão.
71 ü Exemplo 2
72 Solução Tem-se que:
73 Mas...
74 Dos triângulos semelhantes KP A O 2 e KP B O 4 têm-se: Mas...
75 Substituindo (4) em (2) : Substituindo (3) em (5) :
76 ü Exemplo 3 Provar que, para as polias mostradas as velocidades angulares das polias são inversamente proporcionais ao segmento determinado na linha de centro por sua interseção com a linha de transmissão.
77 Solução Dos triângulos semelhantes O 2 T 2 K e O 4 T 4 K têm-se:
78 Conclusão: As velocidades angulares das polias são inversamente proporcionais ao segmento determinado na linha de centro por sua interseção com a linha de transmissão.
79