Sistemas de Controle (CON) Ações Básicas de Controle e Controle Proporcional
|
|
|
- Vitorino Carmona Malheiro
- 8 Há anos
- Visualizações:
Transcrição
1 Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Ações Básicas de Controle e Controle Proporcional Aula /1 Prof. Eduardo Henrique Couto

2 Plano de Aula 2 Tipos de Controles Classificação dos controladores industriais Controlador on-off Controlador proporcional (P) Controlador integral (I) Controlador proporcional-integral (PI) Controlador proporcional-derivativo (PD) Controlador proporcional-integral-derivativo (PID) Controladores pneumáticos
 Controlador proporcional-integral-derivativo")
3 Tipos de Controle 3 Controle manual

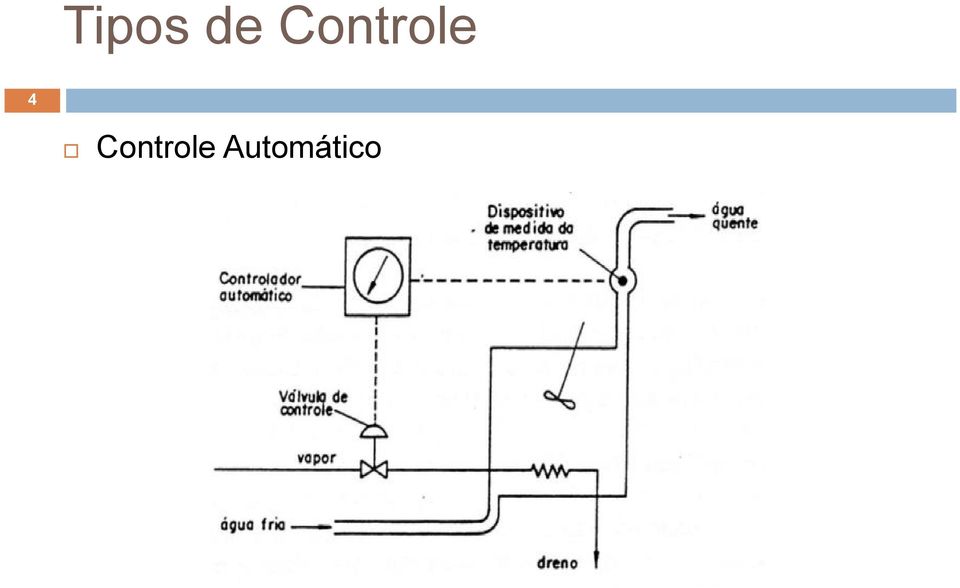
4 Tipos de Controle 4 Controle Automático
5 Tipos de Controle 5 Controle Auto-Operado. Agregam em uma unidade elemento de medida e atuador. Utilizam como fonte de energia para o atuador o próprio sistema controlado, por meio do elemento de medida. São relativamente simples e baratos.

6 Tipos de Controle 6 Controle em Malha Aberta

7 Tipos de Controle 7 Controle em Malha Fechada

8 Classificação dos Controladores 8 Controlador liga-desliga (on-off) Controlador proporcional (P) Controlador integral (I) Controlador proporcional-integral (PI) Controlador proporcional-derivativo (PD) Controlador proporcional-integral-derivativo (PID)
 Controlador")
9 Controlador Liga-Desliga 9 O atuador do sistema apresenta apenas duas posições fixas (ou estados). É relativamente simples e barato. =, > 0, < 0 : erro em função do tempo

10 Controlador Liga-Desliga 10 Caixa d água residencial Chave boia

11 Controlador Proporcional (P) 11 É essencialmente um amplificador com ganho ajustável. = ou =

12 Controlador Integral (I) 12 A taxa de variação do sinal de controle é proporcional ao erro. = = ou =

13 13 Controlador Proporcional-Integral (PI) É a combinação de um controlador P e um controlador I. = + ou = 1 + 1

14 14 Controlador Proporcional-Integral (PI) Elimina erro em regime permanente. Causa oscilação na resposta do sistema.

15 15 Controlador Proporcional-Derivativo (PD) É a combinação de um controlador P com uma ação de controle proporcional à taxa de variação do erro. = + ou = 1 +

16 16 Controlador Proporcional-Derivativo (PD) Tem um caráter antecipatório. Amplifica sinais de ruídos. Causa efeito de saturação no atuador.

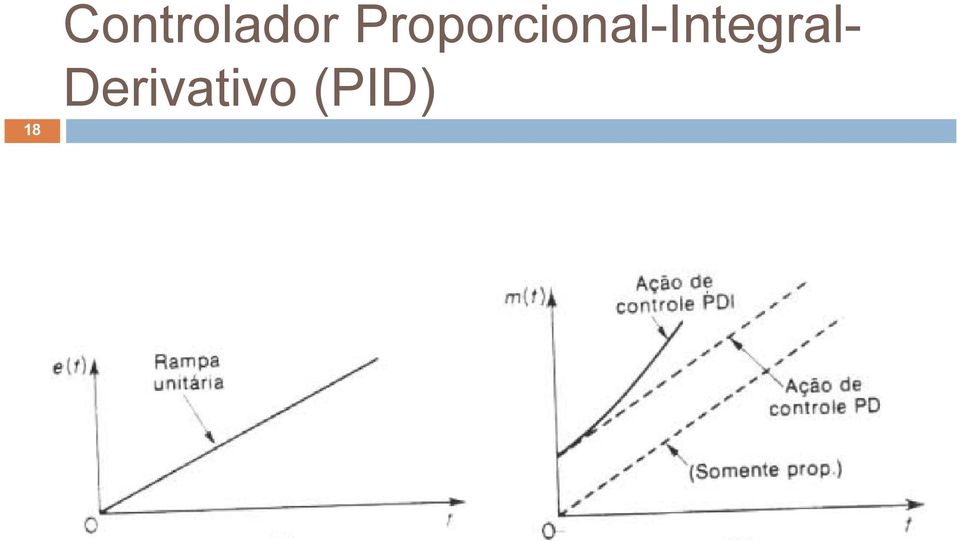
17 17 Controlador Proporcional-Integral- Derivativo (PID) É a junção dos três tipos de ação de controle P + I + D. = + + ou =

18 18 Controlador Proporcional-Integral- Derivativo (PID)
19 19 Controle Proporcional

20 Condição de Módulo e Fase 20 Sistema Controlado Referência + Controlador Sistema Saída Realimentação Sensor Observação: existem outras estruturas de controle. Por exemplo com na realimentação. Cada estrutura apresenta uma formulação própria.

21 Condição de Módulo e Fase 21 Considere o sistema de controle apresentado: = = = 1 + = 1 + Pela definição do lugar geométrico das raízes (0 < ): 1 + = 0 = 1 = 1 ± = 0,1,2,3
22 Condição de Módulo e Fase 22 Condição de módulo = 1 Como > 0 = 1 =
23 Condição de Módulo e Fase 23 Condição de fase (ou angular) = ± ( = 0,1,2,3 ) Como > 0: = = = ± = ± = ±
24 Condição de Módulo e Fase 24 Se um ponto = atende a condição de fase, então LR. Logo, podemos usar a condição de módulo para calcular o valor de que leva o sistema em malha fechada a apresentar o polo. Dessa forma é possível impor um comportamento desejado ao sistema pela alocação dos polos de malha fechada.
25 Condição de Módulo e Fase 25 Exemplo 1 Seja a função de transferência de um sistema. O ponto = faz parte do LR desse sistema? = 30 ( ) = 30 ( + 1)( + 5)
26 Escolha dos Polos a Alocar 26 Requisitos de projeto Limite máximo do tanque; Posição de colisão da ferramenta; Tempo máximo para realização da manobra;... Tradução em parâmetros Máximo sobressinal; Tempo de acomodação; Tempo de pico;... Representação dos parâmetros na função de transferência e Polos:, = ± 1 = ±
27 Escolha dos Polos a Alocar 27 Para utilizar o método de alocação de polos apresentado é necessário que o sistema seja de segunda ordem. É possível aplicar o método em sistemas de ordem superior, contudo, deve ocorrer dominância dos dois polos mais próximos da origem sobre os demais. Nesse caso, utiliza-se uma aproximação do sistema para segunda ordem.
28 Sequência de Projeto 28 O objetivo é determinar de maneira que os polos dominantes de malha fechada sejam,, os polos determinados pelo método de escolha anteriormente apresentado. Para um controlador proporcional = =
29 Sequência de Projeto Determinar, pelos requisitos de projeto; 2. Verificar para a condição de fase se, pode ser obtido pela multiplicação por um ganho. Ou seja,, ; 3. Calcular o ganho pela condição módulo; 4. Determinar o ganho do controlador dividindo o ganho encontrado pelo ganho do sistema: =
ESCOLA NAVAL DIRETORIA DE ENSINO DA MARINHA DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO. Professor Leonardo Gonsioroski
 ESCOLA NAVAL DIRETORIA DE ENSINO DA MARINHA DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Na aula passada vimos Compensação de sistemas Efeitos da Adição de pólos e zeros Compensadores de Avanço de Fase
ESCOLA NAVAL DIRETORIA DE ENSINO DA MARINHA DEPARTAMENTO DE ENGENHARIA CONTROLE E AUTOMAÇÃO Na aula passada vimos Compensação de sistemas Efeitos da Adição de pólos e zeros Compensadores de Avanço de Fase
CONTROLO DE SISTEMAS
 UNIVERSIDADE DA BEIRA INTERIOR DEPARTAMENTO DE ENGENHARIA ELECTROMECÂNICA CONTROLO DE SISTEMAS Lugar Geométrico das Raízes PROJECTO E ANÁLISE DA RESPOSTA TRANSITÓRIA E ESTABILIDADE Parte 1/3 - Compensação
UNIVERSIDADE DA BEIRA INTERIOR DEPARTAMENTO DE ENGENHARIA ELECTROMECÂNICA CONTROLO DE SISTEMAS Lugar Geométrico das Raízes PROJECTO E ANÁLISE DA RESPOSTA TRANSITÓRIA E ESTABILIDADE Parte 1/3 - Compensação
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica
 UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
UNIVERSIDADE FEDERAL DE SANTA MARIA COLÉGIO TÉCNICO INDUSTRIAL DE SANTA MARIA Curso de Eletrotécnica Apostila de Automação Industrial Elaborada pelo Professor M.Eng. Rodrigo Cardozo Fuentes Prof. Rodrigo
Controle II. Estudo e sintonia de controladores industriais
 Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Controle II Estudo e sintonia de controladores industriais Introdução A introdução de controladores visa modificar o comportamento de um dado sistema, o objetivo é, normalmente, fazer com que a resposta
Processos industriais INSTRUMENTAÇÃO E CONTROLE. Pirâmide da automação 29/1/2012. Controle automático de processo
 Processos industriais INSTRUMENTAÇÃO E CONTROLE Controle automático de processo Processos Contínuos: são aqueles que possuem saídas contínuas como, por exemplo, processos de geração de energia. Processos
Processos industriais INSTRUMENTAÇÃO E CONTROLE Controle automático de processo Processos Contínuos: são aqueles que possuem saídas contínuas como, por exemplo, processos de geração de energia. Processos
6 Conclusões e sugestões para trabalhos futuros
 6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
6 Conclusões e sugestões para trabalhos futuros 6.1. Conclusões Neste trabalho estudou-se um sistema de acompanhamento de alvos do tipo pan-tilt atuado por motores de corrente contínua e fixo em um corpo
Sistemas de Controle (CON) Introdução aos Sistemas de Controle
 Introdução aos Sistemas de Controle") Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Introdução aos Sistemas de Controle Aula 01 2013/2
Universidade do Estado de Santa Catarina UDESC Centro de Ciências Tecnológicas CCT Departamento de Engenharia Mecânica DEM Sistemas de Controle (CON) Introdução aos Sistemas de Controle Aula 01 2013/2
Controle de Sistemas. O Método do Lugar das Raízes. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sistemas O Método do Lugar das Raízes Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Introdução No projeto de um sistema de controle, é fundamental se determinar
Controle de Sistemas O Método do Lugar das Raízes Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas Introdução No projeto de um sistema de controle, é fundamental se determinar
Projeto de sistemas de controle
 Projeto de sistemas de controle Os controladores clássicos encontrados na literatura podem ser classificados como: Controladores de duas posições (ou on-off). Controladores proporcionais. Controladores
Projeto de sistemas de controle Os controladores clássicos encontrados na literatura podem ser classificados como: Controladores de duas posições (ou on-off). Controladores proporcionais. Controladores
Me todos de Ajuste de Controladores
 Me todos de Ajuste de Controladores Recapitulando aulas passadas Vimos algumas indicações para a escolha do tipo de controlador feedback dependendo da malha de controle que está sendo projetada. Vimos
Me todos de Ajuste de Controladores Recapitulando aulas passadas Vimos algumas indicações para a escolha do tipo de controlador feedback dependendo da malha de controle que está sendo projetada. Vimos
Tipos de controladores e funcionamento
 Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ141- INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS custo Malhas Outros Processos de controle: de Separação Tipos de controladores e funcionamento
Departamento de Engenharia Química e de Petróleo UFF Disciplina: TEQ141- INSTRUMENTAÇÃO E CONTROLE DE PROCESSOS custo Malhas Outros Processos de controle: de Separação Tipos de controladores e funcionamento
Estabilizador de Tensão Alternada
 Universidade Federal do Ceará PET Engenharia Elétrica Fortaleza CE, Brasil, Abril, 2013 Universidade Federal do Ceará Departamento de Engenharia Elétrica PET Engenharia Elétrica UFC Estabilizador de Tensão
Universidade Federal do Ceará PET Engenharia Elétrica Fortaleza CE, Brasil, Abril, 2013 Universidade Federal do Ceará Departamento de Engenharia Elétrica PET Engenharia Elétrica UFC Estabilizador de Tensão
Capítulo 3 Sistemas de Controle com Realimentação
 Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Capítulo 3 Sistemas de Controle com Realimentação Gustavo H. C. Oliveira TE055 Teoria de Sistemas Lineares de Controle Dept. de Engenharia Elétrica / UFPR Gustavo H. C. Oliveira Sistemas de Controle com
Processos em Engenharia: Introdução a Servomecanismos
 Processos em Engenharia: Introdução a Servomecanismos Prof. Daniel Coutinho coutinho@das.ufsc.br Departamento de Automação e Sistemas DAS Universidade Federal de Santa Catarina UFSC DAS 5101 - Aula 7 p.1/47
Processos em Engenharia: Introdução a Servomecanismos Prof. Daniel Coutinho coutinho@das.ufsc.br Departamento de Automação e Sistemas DAS Universidade Federal de Santa Catarina UFSC DAS 5101 - Aula 7 p.1/47
Sistemas Embarcados. Controladores PI, PD e PID
 Sistemas Embarcados Controladores PI, PD e PID Controladores PI, PD e PID O que são os controladores PI, PD e PID? Aplicações dos controladores Implementação analógica dos controladores Implementação digital
Sistemas Embarcados Controladores PI, PD e PID Controladores PI, PD e PID O que são os controladores PI, PD e PID? Aplicações dos controladores Implementação analógica dos controladores Implementação digital
Coordenadas Polares. Prof. Márcio Nascimento. marcio@matematicauva.org
 Coordenadas Polares Prof. Márcio Nascimento marcio@matematicauva.org Universidade Estadual Vale do Acaraú Centro de Ciências Exatas e Tecnologia Curso de Licenciatura em Matemática Disciplina: Matemática
Coordenadas Polares Prof. Márcio Nascimento marcio@matematicauva.org Universidade Estadual Vale do Acaraú Centro de Ciências Exatas e Tecnologia Curso de Licenciatura em Matemática Disciplina: Matemática
Root Locus (Método do Lugar das Raízes)
") Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Root Locus (Método do Lugar das Raízes) Ambos a estabilidade e o comportamento da resposta transitória em um sistema de controle em malha fechada estão diretamente relacionadas com a localização das raízes
Curso de Instrumentista de Sistemas. Fundamentos de Controle. Prof. Msc. Jean Carlos
 Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Ações de controle em malha fechada Controle automático contínuo em malha fechada Ação proporcional A característica da
Curso de Instrumentista de Sistemas Fundamentos de Controle Prof. Msc. Jean Carlos Ações de controle em malha fechada Controle automático contínuo em malha fechada Ação proporcional A característica da
Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle
 Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle Hector Bessa Silveira e Daniel Coutinho 2012/2 1 Objetivos Neste próximos laboratórios, utilizar-se-á
Laboratórios 9, 10 e 11: Projeto de Controladores pelo Lugar das Raízes DAS5317 Sistemas de Controle Hector Bessa Silveira e Daniel Coutinho 2012/2 1 Objetivos Neste próximos laboratórios, utilizar-se-á
Instrumentação e Controle de Processos Industriais.
 Instrumentação e Controle de Processos Industriais. Objetivo: O Curso tem como meta preparar os alunos da área industrial para obter conhecimento de instrumentos de medidas industriais, normas de instrumentação,
Instrumentação e Controle de Processos Industriais. Objetivo: O Curso tem como meta preparar os alunos da área industrial para obter conhecimento de instrumentos de medidas industriais, normas de instrumentação,
CURSOS ONLINE CONTROLE AUTOMÁTICO DE PROCESSOS
 CURSOS ONLINE CONTROLE AUTOMÁTICO DE PROCESSOS. A Quem se destina Este curso, constituido de cinco módulos, destina-se a alunos do curso da área de eletroeletrônica, automação industrial e outras áreas
CURSOS ONLINE CONTROLE AUTOMÁTICO DE PROCESSOS. A Quem se destina Este curso, constituido de cinco módulos, destina-se a alunos do curso da área de eletroeletrônica, automação industrial e outras áreas
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Sistemas supervisórios
 Sistemas supervisórios O software supervisório utiliza a representação de objetos estáticos e animados para representar todo o processo de uma planta, assim como uma interface IHM. Ela opera em dois modos:
Sistemas supervisórios O software supervisório utiliza a representação de objetos estáticos e animados para representar todo o processo de uma planta, assim como uma interface IHM. Ela opera em dois modos:
Sistemas Fixos de CO2 - Parte 2 Departamento Técnico da GIFEL Engenharia de Incêndios
 Sistemas Fixos de CO2 - Parte 2 Departamento Técnico da GIFEL Engenharia de Incêndios Sistemas fixos de CO 2 : Os sistemas fixos diferem conforme a modalidade de armazenamento do meio extintor entre Sistemas
Sistemas Fixos de CO2 - Parte 2 Departamento Técnico da GIFEL Engenharia de Incêndios Sistemas fixos de CO 2 : Os sistemas fixos diferem conforme a modalidade de armazenamento do meio extintor entre Sistemas
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04037 Sistemas de Controle Digitais
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG437 Sistemas de Controle Digitais Introdução Controladores PID Prof. Walter Fetter Lages 2 de maio
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG437 Sistemas de Controle Digitais Introdução Controladores PID Prof. Walter Fetter Lages 2 de maio
Eduardo Camponogara. DAS-5103: Cálculo Numérico para Controle e Automação. Departamento de Automação e Sistemas Universidade Federal de Santa Catarina
 Eduardo Camponogara Departamento de Automação e Sistemas Universidade Federal de Santa Catarina DAS-5103: Cálculo Numérico para Controle e Automação 1/48 Sumário Arredondamentos Erros 2/48 Sumário Arredondamentos
Eduardo Camponogara Departamento de Automação e Sistemas Universidade Federal de Santa Catarina DAS-5103: Cálculo Numérico para Controle e Automação 1/48 Sumário Arredondamentos Erros 2/48 Sumário Arredondamentos
EQE-594 Controle e Instrumentação de Processos Profa. Ofélia de Q.F. Araújo EQ/UFRJ CONTROLE SELETIVO e OVERRIDE
 CONTROLE SELETIVO e OVERRIDE Nas estratégias de controle, pode surgir a necessidade de aplicar lógica seletora de sinais. Define-se, para tal, chaves seletoras de sinais: (1) Chave Seletora de Valor Alto
CONTROLE SELETIVO e OVERRIDE Nas estratégias de controle, pode surgir a necessidade de aplicar lógica seletora de sinais. Define-se, para tal, chaves seletoras de sinais: (1) Chave Seletora de Valor Alto
Aula 11 Root Locus LGR (Lugar Geométrico das Raízes) parte I
 parte I") Aula 11 Root Locus LGR (Lugar Geométrico das Raízes) parte I Sistema de malha fechada G(s) G(s) G(s) Sistema de malha fechada K O Root Locus é o lugar geométrico dos polos do sistema de malha fechada,
Aula 11 Root Locus LGR (Lugar Geométrico das Raízes) parte I Sistema de malha fechada G(s) G(s) G(s) Sistema de malha fechada K O Root Locus é o lugar geométrico dos polos do sistema de malha fechada,
Análise das Tarifas e Progressividade da conta de água em 13 Estados brasileiros
 Análise das Tarifas e Progressividade da conta de água em 13 Estados brasileiros Análise das Tarifas de Água OBJETIVO: O objetivo desse trabalho é comparar e analisar as tarifas de água cobradas em diversos
Análise das Tarifas e Progressividade da conta de água em 13 Estados brasileiros Análise das Tarifas de Água OBJETIVO: O objetivo desse trabalho é comparar e analisar as tarifas de água cobradas em diversos
Distribuição Gaussiana. Modelo Probabilístico para Variáveis Contínuas
 Distribuição Gaussiana Modelo Probabilístico para Variáveis Contínuas Distribuição de Frequências do Peso, em gramas, de 10000 recém-nascidos Frequencia 0 500 1000 1500 2000 2500 3000 3500 1000 2000 3000
Distribuição Gaussiana Modelo Probabilístico para Variáveis Contínuas Distribuição de Frequências do Peso, em gramas, de 10000 recém-nascidos Frequencia 0 500 1000 1500 2000 2500 3000 3500 1000 2000 3000
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A22 (1) O circuito a seguir amplifica a diferença de
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A22 (1) O circuito a seguir amplifica a diferença de
Capítulo 5: Aplicações da Derivada
 Instituto de Ciências Exatas - Departamento de Matemática Cálculo I Profª Maria Julieta Ventura Carvalho de Araujo Capítulo 5: Aplicações da Derivada 5- Acréscimos e Diferenciais - Acréscimos Seja y f
Instituto de Ciências Exatas - Departamento de Matemática Cálculo I Profª Maria Julieta Ventura Carvalho de Araujo Capítulo 5: Aplicações da Derivada 5- Acréscimos e Diferenciais - Acréscimos Seja y f
FORMULÁRIOS DR PARANÁ ELABORAÇÃO DE SITUAÇÕES DE APRENDIZAGEM
 FORMULÁRIOS DR PARANÁ ELABORAÇÃO DE SITUAÇÕES DE APRENDIZAGEM SENAI/PR 1 PLANO DE SITUAÇÃO DE APRENDIZAGEM N.º 1 (1) Seleção de capacidades, conteúdos formativos e definição da estratégia Unidade do SENAI:
FORMULÁRIOS DR PARANÁ ELABORAÇÃO DE SITUAÇÕES DE APRENDIZAGEM SENAI/PR 1 PLANO DE SITUAÇÃO DE APRENDIZAGEM N.º 1 (1) Seleção de capacidades, conteúdos formativos e definição da estratégia Unidade do SENAI:
Aula 3 OS TRANSITÒRIOS DAS REDES ELÉTRICAS
 Aula 3 OS TRANSITÒRIOS DAS REDES ELÉTRICAS Prof. José Roberto Marques (direitos reservados) A ENERGIA DAS REDES ELÉTRICAS A transformação da energia de um sistema de uma forma para outra, dificilmente
Aula 3 OS TRANSITÒRIOS DAS REDES ELÉTRICAS Prof. José Roberto Marques (direitos reservados) A ENERGIA DAS REDES ELÉTRICAS A transformação da energia de um sistema de uma forma para outra, dificilmente
Problemas de Otimização. Problemas de Otimização. Solução: Exemplo 1: Determinação do Volume Máximo
 UNIVERSIDADE DO ESTADO DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE ENGENHARIA CIVIL DISCIPLINA: CÁLCULO DIFERENCIAL E INTEGRAL I Eemplo 1: Determinação
UNIVERSIDADE DO ESTADO DE MATO GROSSO CAMPUS UNIVERSITÁRIO DE SINOP FACULDADE DE CIÊNCIAS EXATAS E TECNOLÓGICAS CURSO DE ENGENHARIA CIVIL DISCIPLINA: CÁLCULO DIFERENCIAL E INTEGRAL I Eemplo 1: Determinação
Aula 6 Derivadas Direcionais e o Vetor Gradiente
 Aula 6 Derivadas Direcionais e o Vetor Gradiente MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
Aula 6 Derivadas Direcionais e o Vetor Gradiente MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
UNIVERSIDADE FEDERAL DE OURO PRETO ESCOLA DE MINAS COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU GABRIEL FONSECA FALEIROS
 UNIVERSIDADE FEDERAL DE OURO PRETO ESCOLA DE MINAS COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU GABRIEL FONSECA FALEIROS HEURÍSTICA ITERATED LOCAL SEARCH APLICADA A PROBLEMAS DE SINTONIA
UNIVERSIDADE FEDERAL DE OURO PRETO ESCOLA DE MINAS COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU GABRIEL FONSECA FALEIROS HEURÍSTICA ITERATED LOCAL SEARCH APLICADA A PROBLEMAS DE SINTONIA
Compensadores. Controle 1 - DAELN - UTFPR. Os compensadores são utilizados para alterar alguma característica do sistema em malha fechada.
 Compenadore 0.1 Introdução Controle 1 - DAELN - UTFPR Prof. Paulo Roberto Brero de Campo O compenadore ão utilizado para alterar alguma caracterítica do itema em malha fechada. 1. Avanço de fae (lead):
Compenadore 0.1 Introdução Controle 1 - DAELN - UTFPR Prof. Paulo Roberto Brero de Campo O compenadore ão utilizado para alterar alguma caracterítica do itema em malha fechada. 1. Avanço de fae (lead):
3 Classificação dos Instrumentos Industriais
 3 Classificação dos Instrumentos Industriais Os elementos utilizados na instrumentação industrial são apresentados nessa seção. Os instrumentos são divididos de acordo com a função que o mesmo terá nos
3 Classificação dos Instrumentos Industriais Os elementos utilizados na instrumentação industrial são apresentados nessa seção. Os instrumentos são divididos de acordo com a função que o mesmo terá nos
LABORATÓRIO DE CONTROLE I APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 5: APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM COLEGIADO DE ENGENHARIA
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 5: APLICAÇÃO DE COMPENSADORES DE FASE DE 1ª ORDEM E DE 2ª ORDEM COLEGIADO DE ENGENHARIA
Sessão Prática: Simulação e Controle com LabVIEW
 Sessão Prática: Simulação e Controle com LabVIEW 1 Visão geral Este tutorial mostra as características dos controles proporcional (P), integral (I) e derivativo (D), e como utilizálos para obter a resposta
Sessão Prática: Simulação e Controle com LabVIEW 1 Visão geral Este tutorial mostra as características dos controles proporcional (P), integral (I) e derivativo (D), e como utilizálos para obter a resposta
Aula 8. Política Fiscal: déficit e dívida pública
 Aula 8 Política Fiscal: déficit e dívida pública O Crescimento da Participação do Setor Público na Atividade Econômica Crescimento da renda per capita - gera um aumento da demanda de bens e serviços públicos
Aula 8 Política Fiscal: déficit e dívida pública O Crescimento da Participação do Setor Público na Atividade Econômica Crescimento da renda per capita - gera um aumento da demanda de bens e serviços públicos
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA. Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva
 UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva Controlador Proporcional Controlador PI A Relação entre a saída e o
UNIVERSIDADE GAMA FILHO PROCET DEPARTAMENTO DE ENGENHARIA ELÉTRICA Disciplina de Controle II Prof. MC. Leonardo Gonsioroski da Silva Controlador Proporcional Controlador PI A Relação entre a saída e o
MÓDULO 1 INTRODUÇÃO À AUTOMAÇÃO E INSTRUMENTAÇÃO CARGA HORÁRIA 24 HORAS
 MÓDULO 1 INTRODUÇÃO À AUTOMAÇÃO E INSTRUMENTAÇÃO CARGA HORÁRIA 24 HORAS INTRODUÇÃO À INSTRUMENTAÇÃO 1 Introdução à instrumentação 2 A evolução da instrumentação 3 Definições na instrumentação 3.1 Classes
MÓDULO 1 INTRODUÇÃO À AUTOMAÇÃO E INSTRUMENTAÇÃO CARGA HORÁRIA 24 HORAS INTRODUÇÃO À INSTRUMENTAÇÃO 1 Introdução à instrumentação 2 A evolução da instrumentação 3 Definições na instrumentação 3.1 Classes
ANEMÔMETRO A FIO QUENTE
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÀO ELTRÔNICA ANEMÔMETRO A FIO QUENTE Cayo Cid de França Moraes 200321285 Natal/RN ANEMÔMETRO
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÀO ELTRÔNICA ANEMÔMETRO A FIO QUENTE Cayo Cid de França Moraes 200321285 Natal/RN ANEMÔMETRO
Prof. Graça. Circuitos elétricos CC
 01 Prof. Graça Circuitos elétricos CC Circuitos elétricos de CC Conteúdo Circuitos Equivalentes Princípio da Superposição Elementos Lineares egras de Kirchoff Divisor de tensão Circuito de várias malhas
01 Prof. Graça Circuitos elétricos CC Circuitos elétricos de CC Conteúdo Circuitos Equivalentes Princípio da Superposição Elementos Lineares egras de Kirchoff Divisor de tensão Circuito de várias malhas
Função do 2º Grau. Alex Oliveira
 Função do 2º Grau Alex Oliveira Apresentação A função do 2º grau, também chamada de função quadrática é definida pela expressão do tipo: y = f(x) = ax² + bx + c onde a, b e c são números reais e a 0. Exemplos:
Função do 2º Grau Alex Oliveira Apresentação A função do 2º grau, também chamada de função quadrática é definida pela expressão do tipo: y = f(x) = ax² + bx + c onde a, b e c são números reais e a 0. Exemplos:
5. Diagramas de blocos
 5. Diagramas de blocos Um sistema de controlo pode ser constituído por vários componentes. O diagrama de blocos é uma representação por meio de símbolos das funções desempenhadas por cada componente e
5. Diagramas de blocos Um sistema de controlo pode ser constituído por vários componentes. O diagrama de blocos é uma representação por meio de símbolos das funções desempenhadas por cada componente e
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores. Controlo 2005/2006. Controlo de velocidade de um motor D.C.
 Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2005/2006 Controlo de velocidade de um motor D.C. Elaborado por E. Morgado 1 e F. M. Garcia 2 Reformulado
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2005/2006 Controlo de velocidade de um motor D.C. Elaborado por E. Morgado 1 e F. M. Garcia 2 Reformulado
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
2. Sistemas de Produção e Conceitos de Sistemas de Controle
 UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENG. DE PRODUÇÃO E SISTEMAS - DEPS INFORMÁTICA INDUSTRIAL IFD 2. Sistemas de Produção e Conceitos de Sistemas
UNIVERSIDADE DO ESTADO DE SANTA CATARINA UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS CCT DEPARTAMENTO DE ENG. DE PRODUÇÃO E SISTEMAS - DEPS INFORMÁTICA INDUSTRIAL IFD 2. Sistemas de Produção e Conceitos de Sistemas
Função de Transferência de Malha Fechada
 Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Função de Transferência de Malha Fechada R(s) B(s) + - E(s) Controlador Gc(S) U(s) Sensor G(S) Planta C(s) C(s)=G(s)*U(s) H(S) C(s)=G(s)*Gc(s)*E(s) C(s)=G(s)*Gc(s)*[ R(s)-B(s) ] C(s)=G(s)*Gc(s)*[ R(s)-H(s)*C(s)
Modelo Matemático e Controle de um Robô Móvel. 2.1. Modelo do motor que aciona cada roda do robô
 1. Introdução Modelo Matemático e Controle de um Robô Móvel Nesta aula serão apresentadas leis de controle que permitem a um robô móvel nãoholonômico navegar de maneira coordenada desde uma localização
1. Introdução Modelo Matemático e Controle de um Robô Móvel Nesta aula serão apresentadas leis de controle que permitem a um robô móvel nãoholonômico navegar de maneira coordenada desde uma localização
CENTRO UNIVERSITÁRIO PADRE ANCHIENTA. Curso de Engenharia Química. Instrumentação Industrial e Controle de Processos I
 Apostila Instrumentação Industrial I CENTRO UNIVERSITÁRIO PADRE ANCHIENTA Curso de Engenharia Química Instrumentação Industrial e Controle de Processos I Profº Mário Luís Penteado Betioli Profº Edson Anício
Apostila Instrumentação Industrial I CENTRO UNIVERSITÁRIO PADRE ANCHIENTA Curso de Engenharia Química Instrumentação Industrial e Controle de Processos I Profº Mário Luís Penteado Betioli Profº Edson Anício
USO DO SCILAB PARA REALIZAÇÃO EM COMPUTADOR DE UM PROJETO DE UM COMPENSADOR DE AVANÇO
 João Baptista Bayão Ribeiro USO DO SCILAB PARA REALIZAÇÃO EM COMPUTADOR DE UM PROJETO DE UM COMPENSADOR DE AVANÇO Rio de Janeiro 2014 2 ÍNDICE USO DO SCILAB PARA REALIZAÇÃO...1 EM COMPUTADOR DE UM PROJETO...1
João Baptista Bayão Ribeiro USO DO SCILAB PARA REALIZAÇÃO EM COMPUTADOR DE UM PROJETO DE UM COMPENSADOR DE AVANÇO Rio de Janeiro 2014 2 ÍNDICE USO DO SCILAB PARA REALIZAÇÃO...1 EM COMPUTADOR DE UM PROJETO...1
LABORATÓRIO DE CONTROLE I ESTUDO DE CONTROLADORES ELETRÔNICOS BÁSICOS VIA AMPLIFICADORES OPERACIONAIS
 UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 2: ESTUDO DE CONTROLADORES ELETRÔNICOS BÁSICOS VIA AMPLIFICADORES OPERACIONAIS COLEGIADO
UNIVERSIDADE FEDERAL DO VALE DO SÃO FRANCISCO COLEGIADO DE ENGENHARIA ELÉTRICA LABORATÓRIO DE CONTROLE I Experimento 2: ESTUDO DE CONTROLADORES ELETRÔNICOS BÁSICOS VIA AMPLIFICADORES OPERACIONAIS COLEGIADO
ESTUDO ANALÍTICO DE CONTROLADORES PID E PID SUPERVISÓRIO FUZZY EM SISTEMAS NÃO-LINEARES
 UNIVERSIDADE FEDERAL DE OURO PRETO - UFOP ESCOLA DE MINAS - EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU GUILHERME MAGALHÃES JÚNIOR ESTUDO ANALÍTICO DE CONTROLADORES PID E PID SUPERVISÓRIO
UNIVERSIDADE FEDERAL DE OURO PRETO - UFOP ESCOLA DE MINAS - EM COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE E AUTOMAÇÃO - CECAU GUILHERME MAGALHÃES JÚNIOR ESTUDO ANALÍTICO DE CONTROLADORES PID E PID SUPERVISÓRIO
EA616B Análise Linear de Sistemas Resposta em Frequência
 EA616B Análise Linear de Sistemas Resposta em Frequência Prof. Pedro L. D. Peres Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre 2013 Resposta em Frequência
EA616B Análise Linear de Sistemas Resposta em Frequência Prof. Pedro L. D. Peres Faculdade de Engenharia Elétrica e de Computação Universidade Estadual de Campinas 2 o Semestre 2013 Resposta em Frequência
Estudo do sistema de IHM para automação de sistema de renovação de água dos chillers em processo de abate de aves.
 Estudo do sistema de IHM para automação de sistema de renovação de água dos chillers em processo de abate de aves. TIAGO NELSON ESTECECHEN tiago_cascavel@hotmail.com UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ
Estudo do sistema de IHM para automação de sistema de renovação de água dos chillers em processo de abate de aves. TIAGO NELSON ESTECECHEN tiago_cascavel@hotmail.com UNIVERSIDADE ESTADUAL DO OESTE DO PARANÁ
Curvas em coordenadas polares
 1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
Singularidades de Funções de Variáveis Complexas
 Singularidades de Funções de Variáveis Complexas AULA 11 META: Introduzir o conceito de singularidades de funções de variáveis complexas. OBJETIVOS: Ao fim da aula os alunos deverão ser capazes de: Definir
Singularidades de Funções de Variáveis Complexas AULA 11 META: Introduzir o conceito de singularidades de funções de variáveis complexas. OBJETIVOS: Ao fim da aula os alunos deverão ser capazes de: Definir
Instrumentação para Espectroscopia Óptica. CQ122 Química Analítica Instrumental II 2º sem. 2014 Prof. Claudio Antonio Tonegutti
 Instrumentação para Espectroscopia Óptica CQ122 Química Analítica Instrumental II 2º sem. 2014 Prof. Claudio Antonio Tonegutti INTRODUÇÃO Os componentes básicos dos instrumentos analíticos para a espectroscopia
Instrumentação para Espectroscopia Óptica CQ122 Química Analítica Instrumental II 2º sem. 2014 Prof. Claudio Antonio Tonegutti INTRODUÇÃO Os componentes básicos dos instrumentos analíticos para a espectroscopia
MATEMÁTICA UFRGS 2011
 MATEMÁTICA UFRGS 2011 01. Uma torneira com vazamento pinga, de maneira constante, 25 gotas de água por minuto. Se cada gota contém 0,2 ml de água, então, em 24 horas o vazamento será de a) 0,072 L. b)
MATEMÁTICA UFRGS 2011 01. Uma torneira com vazamento pinga, de maneira constante, 25 gotas de água por minuto. Se cada gota contém 0,2 ml de água, então, em 24 horas o vazamento será de a) 0,072 L. b)
Laboratórios de CONTROLO (LEE) 2 o Trabalho Motor DC Controlo de Velocidade
 2 o Trabalho Motor DC Controlo de Velocidade") Laboratórios de CONTROLO (LEE) 2 o Trabalho Motor DC Controlo de Velocidade Baseado no trabalho Controlo de Velocidade de um motor DC de E. Morgado, F. Garcia e J. Gaspar João Miguel Raposo Sanches 1 o
Laboratórios de CONTROLO (LEE) 2 o Trabalho Motor DC Controlo de Velocidade Baseado no trabalho Controlo de Velocidade de um motor DC de E. Morgado, F. Garcia e J. Gaspar João Miguel Raposo Sanches 1 o
Prova 2 - Sistemas de Controle Projetos
 Prova - Sistemas de Controle Projetos Pedro Batista (887) - pedro@ufpa.br Paulo Victor Mocbel (887) - pvmocbel@gmail.com December 4, Projeto de Controlador PI ideal Desejamos adicionar um controlador proporcional
Prova - Sistemas de Controle Projetos Pedro Batista (887) - pedro@ufpa.br Paulo Victor Mocbel (887) - pvmocbel@gmail.com December 4, Projeto de Controlador PI ideal Desejamos adicionar um controlador proporcional
INSTRUMENTAÇÃO. Eng. Marcelo Saraiva Coelho
 INSTRUMENTAÇÃO CONCEITOS E DEFINIÇÕES Nas indústrias, o termo PROCESSO tem um significado amplo. Uma operação unitária, como por exemplo, destilação, filtração ou aquecimento, é considerado um PROCESSO.
INSTRUMENTAÇÃO CONCEITOS E DEFINIÇÕES Nas indústrias, o termo PROCESSO tem um significado amplo. Uma operação unitária, como por exemplo, destilação, filtração ou aquecimento, é considerado um PROCESSO.
Sumário. Disciplina: TEQ102 - CONTROLE DE PROCESSOS. Prof a Ninoska Bojorge. Departamento de Engenharia Química e de Petróleo UFF
 1 Disciplina: TEQ102 - CONTROLE DE PROCESSOS INTRODUÇÃO AO CONTROLE DE PROCESSOS Prof a Ninoska Bojorge Departamento de Engenharia Química e de Petróleo UFF Sumário Introdução Evolução do Controle de Processo
1 Disciplina: TEQ102 - CONTROLE DE PROCESSOS INTRODUÇÃO AO CONTROLE DE PROCESSOS Prof a Ninoska Bojorge Departamento de Engenharia Química e de Petróleo UFF Sumário Introdução Evolução do Controle de Processo
Vibrações Mecânicas. Vibração Livre Sistemas com 1 GL. Ramiro Brito Willmersdorf ramiro@willmersdorf.net
 Vibrações Mecânicas Vibração Livre Sistemas com 1 GL Ramiro Brito Willmersdorf ramiro@willmersdorf.net Departamento de Engenharia Mecânica Universidade Federal de Pernambuco 2015.1 Introdução Modelo 1
Vibrações Mecânicas Vibração Livre Sistemas com 1 GL Ramiro Brito Willmersdorf ramiro@willmersdorf.net Departamento de Engenharia Mecânica Universidade Federal de Pernambuco 2015.1 Introdução Modelo 1
MÓDULO 01 INTRODUÇÃO A AUTOMAÇÃO E INSTRUMENTAÇÃO INDUSTRIAL CARGA HORÁRIA 24 HORAS JÁ REALIZADO
 MÓDULO 01 INTRODUÇÃO A AUTOMAÇÃO E INSTRUMENTAÇÃO INDUSTRIAL CARGA HORÁRIA 24 HORAS JÁ REALIZADO INTRODUÇÃO À INSTRUMENTAÇÃO INDUSTRIAL 1. Introdução à instrumentação 2. A evolução da instrumentação 3.
MÓDULO 01 INTRODUÇÃO A AUTOMAÇÃO E INSTRUMENTAÇÃO INDUSTRIAL CARGA HORÁRIA 24 HORAS JÁ REALIZADO INTRODUÇÃO À INSTRUMENTAÇÃO INDUSTRIAL 1. Introdução à instrumentação 2. A evolução da instrumentação 3.
Curriculum de Mecânica dos Fluidos
 Curriculum de Mecânica dos Fluidos A Nível I Introdução à Mecânica dos Fluidos (30 horas) A.1 - Princípios e grandezas físicas em Mecânica dos Fluidos A1.1 Conceitos físico-matemáticos elementares A.1.1.1
Curriculum de Mecânica dos Fluidos A Nível I Introdução à Mecânica dos Fluidos (30 horas) A.1 - Princípios e grandezas físicas em Mecânica dos Fluidos A1.1 Conceitos físico-matemáticos elementares A.1.1.1
OTIMIZAÇÃO DOS PARÂMETROS DE UM CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO POR ALGORITMO GENÉTICO PARA UM SISTEMA DE CONTROLE DE NÍVEL DE LÍQUIDO
 121 OTIMIZAÇÃO DOS PARÂMETROS DE UM CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO POR ALGORITMO GENÉTICO PARA UM SISTEMA DE CONTROLE DE NÍVEL DE LÍQUIDO PROPORTIONAL, INTEGRAL AND DERIVATIVE PARAMETERS
121 OTIMIZAÇÃO DOS PARÂMETROS DE UM CONTROLADOR PROPORCIONAL, INTEGRAL E DERIVATIVO POR ALGORITMO GENÉTICO PARA UM SISTEMA DE CONTROLE DE NÍVEL DE LÍQUIDO PROPORTIONAL, INTEGRAL AND DERIVATIVE PARAMETERS
AULA 28 REGRESSÃO DESCONTÍNUA
 1 AULA 28 REGRESSÃO DESCONTÍNUA Ernesto F. L. Amaral 20 de junho de 2013 Técnicas Avançadas de Avaliação de Políticas Públicas (DCP 098) Fonte: Curso Técnicas Econométricas para Avaliação de Impacto do
1 AULA 28 REGRESSÃO DESCONTÍNUA Ernesto F. L. Amaral 20 de junho de 2013 Técnicas Avançadas de Avaliação de Políticas Públicas (DCP 098) Fonte: Curso Técnicas Econométricas para Avaliação de Impacto do
Estrutura geral de um sistema com realimentação unitária negativa, com um compensador (G c (s) em série com a planta G p (s).
 em série com a planta G p (s).") 2 CONTROLADORES PID Introdução Etrutura geral de um itema com realimentação unitária negativa, com um compenador (G c () em érie com a planta G p (). 2 Controladore PID 2. Acção proporcional (P) G c ()
2 CONTROLADORES PID Introdução Etrutura geral de um itema com realimentação unitária negativa, com um compenador (G c () em érie com a planta G p (). 2 Controladore PID 2. Acção proporcional (P) G c ()
Se A é o sucesso, então é igual a X mais Y mais Z. O trabalho é X; Y é o lazer; e Z é manter a boca fechada. (Albert Einstein)
") Escola Básica Integrada c/ Jardim de Infância da Malagueira Teste de Avaliação Matemática 9ºB Nome: Nº: Data: 4 3 11 Classificação: A prof: O Enc. Educação: Se A é o sucesso, então é igual a X mais Y mais
Escola Básica Integrada c/ Jardim de Infância da Malagueira Teste de Avaliação Matemática 9ºB Nome: Nº: Data: 4 3 11 Classificação: A prof: O Enc. Educação: Se A é o sucesso, então é igual a X mais Y mais
Se A é o sucesso, então é igual a X mais Y mais Z. O trabalho é X; Y é o lazer; e Z é manter a boca fechada. (Albert Einstein)
") Escola Básica Integrada c/ Jardim de Infância da Malagueira Teste de Avaliação Matemática 9ºB Nome: Nº: Data: 4 3 11 Classificação: A prof: O Enc. Educação: Se A é o sucesso, então é igual a X mais Y mais
Escola Básica Integrada c/ Jardim de Infância da Malagueira Teste de Avaliação Matemática 9ºB Nome: Nº: Data: 4 3 11 Classificação: A prof: O Enc. Educação: Se A é o sucesso, então é igual a X mais Y mais
Universidade Federal de Minas Gerais Escola de Engenharia Departamento de Engenharia Eletrônica Laboratório de Informática Industrial
 Universidade Federal de Minas Gerais Escola de Engenharia Departamento de Engenharia Eletrônica Laboratório de Informática Industrial 1 2 a AULA Controlador Lógico Programável: Características de software.
Universidade Federal de Minas Gerais Escola de Engenharia Departamento de Engenharia Eletrônica Laboratório de Informática Industrial 1 2 a AULA Controlador Lógico Programável: Características de software.
Princípios Fundamentais
 Graduação Curso de Engenharia de Produção 20/5/2012 Prof. Dr. Mário Luiz Evangelista Princípios Fundamentais Todas as Decisões são Tomadas a Partir de Alternativas É necessário um denominador comum a fim
Graduação Curso de Engenharia de Produção 20/5/2012 Prof. Dr. Mário Luiz Evangelista Princípios Fundamentais Todas as Decisões são Tomadas a Partir de Alternativas É necessário um denominador comum a fim
Universidade Presbiteriana Mackenzie. Controle II
 Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica Controle II Notas de Aula Prof. Marcio Eisencraft Segundo semestre de 004 Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica
Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica Controle II Notas de Aula Prof. Marcio Eisencraft Segundo semestre de 004 Universidade Presbiteriana Mackenzie Curso de Engenharia Elétrica
Estudo comparativo entre bases de
 Diretoria de Engenharia e Qualidade Ambiental Departamento de Apoio Operacional Divisão de Emissões Veiculares Setor de Avaliação de Emissões Veiculares Estudo comparativo entre bases de Estudo comparativo
Diretoria de Engenharia e Qualidade Ambiental Departamento de Apoio Operacional Divisão de Emissões Veiculares Setor de Avaliação de Emissões Veiculares Estudo comparativo entre bases de Estudo comparativo
ESTUDO DOS PRÉ-AMPLIFICADORES
 CURSO DE ENGENHARIA ELÉTRICA DISCIPLINA: ELETRÔNICA I PROFESSOR: LADEMIR DE J. S. OLIEIRA ESTUDO DOS PRÉ-AMPLIFICADORES 1. AMPLIFICADORES EM CASCATA Nos amplificadores em cascata o ganho sofre influência
CURSO DE ENGENHARIA ELÉTRICA DISCIPLINA: ELETRÔNICA I PROFESSOR: LADEMIR DE J. S. OLIEIRA ESTUDO DOS PRÉ-AMPLIFICADORES 1. AMPLIFICADORES EM CASCATA Nos amplificadores em cascata o ganho sofre influência
Microeconomia II. Cursos de Economia e de Matemática Aplicada à Economia e Gestão
 Microeconomia II Cursos de Economia e de Matemática Aplicada à Economia e Gestão AULA 2.3 Oligopólio em Restrições de Capacidade (Edgeworth). Oligopólio de Stackelberg. Variações Conjecturais Isabel Mendes
Microeconomia II Cursos de Economia e de Matemática Aplicada à Economia e Gestão AULA 2.3 Oligopólio em Restrições de Capacidade (Edgeworth). Oligopólio de Stackelberg. Variações Conjecturais Isabel Mendes
UNIVERSIDADE FEDERAL DE SANTA CATARINA DEPARTAMENTO DE ENGENHARIA ELÉTRICA EEL7051 Materiais Elétricos - Laboratório
 UNIVERSIDADE FEDERAL DE SANTA CATARINA DEPARTAMENTO DE ENGENHARIA ELÉTRICA EEL7051 Materiais Elétricos - Laboratório EXPERIÊNCIA 01 ENSAIO DO DISJUNTOR DE BAIXA TENSÃO 1 INTRODUÇÃO Esta aula no laboratório
UNIVERSIDADE FEDERAL DE SANTA CATARINA DEPARTAMENTO DE ENGENHARIA ELÉTRICA EEL7051 Materiais Elétricos - Laboratório EXPERIÊNCIA 01 ENSAIO DO DISJUNTOR DE BAIXA TENSÃO 1 INTRODUÇÃO Esta aula no laboratório
C5. Formação e evolução estelar
 AST434: C5-1/68 AST434: Planetas e Estrelas C5. Formação e evolução estelar Mário João P. F. G. Monteiro Mestrado em Desenvolvimento Curricular pela Astronomia Mestrado em Física e Química em Contexto
AST434: C5-1/68 AST434: Planetas e Estrelas C5. Formação e evolução estelar Mário João P. F. G. Monteiro Mestrado em Desenvolvimento Curricular pela Astronomia Mestrado em Física e Química em Contexto
Planejamento e Análise de Sistemas de Produção
 Aula 26 Planejamento e Análise de Sistemas de Produção Paulo Augusto Valente Ferreira Departamento de Telemática Faculdade de Engenharia Elétrica e Computação Universidade Estadual de Campinas Conteúdo
Aula 26 Planejamento e Análise de Sistemas de Produção Paulo Augusto Valente Ferreira Departamento de Telemática Faculdade de Engenharia Elétrica e Computação Universidade Estadual de Campinas Conteúdo
Matemática para Engenharia
 Matemática para Engenharia Profa. Grace S. Deaecto Faculdade de Engenharia Mecânica / UNICAMP 13083-860, Campinas, SP, Brasil. grace@fem.unicamp.br Segundo Semestre de 2013 Profa. Grace S. Deaecto ES401
Matemática para Engenharia Profa. Grace S. Deaecto Faculdade de Engenharia Mecânica / UNICAMP 13083-860, Campinas, SP, Brasil. grace@fem.unicamp.br Segundo Semestre de 2013 Profa. Grace S. Deaecto ES401
Antenas, Cabos e Rádio-Enlace
 Alan Menk Santos alanmenk@hotmail.com www.sistemasul.com.br/menk Camada Física: Redes Sem Fio Antenas, Cabos e Rádio-Enlace Rádio Transmissor (Tx) Linha de Transmissão (LT) Antena Transmissora Meio de
Alan Menk Santos alanmenk@hotmail.com www.sistemasul.com.br/menk Camada Física: Redes Sem Fio Antenas, Cabos e Rádio-Enlace Rádio Transmissor (Tx) Linha de Transmissão (LT) Antena Transmissora Meio de
ABAIXO ENCONTRAM-SE 10 QUESTÕES. VOCÊ DEVE ESCOLHER E RESPONDER APENAS A 08 DELAS
 ABAIXO ENCONTRAM-SE 10 QUESTÕES. VOCÊ DEVE ESCOLHER E RESPONDER APENAS A 08 DELAS 01 - Questão Esta questão deve ser corrigida? SIM NÃO Um transformador de isolação monofásico, com relação de espiras N
ABAIXO ENCONTRAM-SE 10 QUESTÕES. VOCÊ DEVE ESCOLHER E RESPONDER APENAS A 08 DELAS 01 - Questão Esta questão deve ser corrigida? SIM NÃO Um transformador de isolação monofásico, com relação de espiras N
Sintonia Automática e Adaptação
 1 Sintonia Automática e Adaptação 1. Introdução A sintonia automática é a combinação dos métodos de determinação da dinâmica do processo com os métodos de cálculo dos parâmetros de um controlador PID;
1 Sintonia Automática e Adaptação 1. Introdução A sintonia automática é a combinação dos métodos de determinação da dinâmica do processo com os métodos de cálculo dos parâmetros de um controlador PID;
Presys Instrumentos e Sistemas
 Versão Especial - Controlador de combustão com duplo limite cruzado. Tabela de regulagem para limites cruzados. Alarmes de mistura rica e pobre. Entrada em contato força saídas para valores configuráveis.
Versão Especial - Controlador de combustão com duplo limite cruzado. Tabela de regulagem para limites cruzados. Alarmes de mistura rica e pobre. Entrada em contato força saídas para valores configuráveis.
INSTRUMENTAÇÃO DE UM SISTEMA DE LABORATÓRIO DE CONTROLE DE ATITUDE COM RESTRIÇÕES DE CHAVEAMENTO
 Anais do 14 O Encontro de Iniciação Científica e Pós-Graduação do ITA XIV ENCITA / 2008 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 20 a 23 2008. INSTRUMENTAÇÃO DE UM SISTEMA
Anais do 14 O Encontro de Iniciação Científica e Pós-Graduação do ITA XIV ENCITA / 2008 Instituto Tecnológico de Aeronáutica São José dos Campos SP Brasil Outubro 20 a 23 2008. INSTRUMENTAÇÃO DE UM SISTEMA
Introdução AVALIAÇÃO DE DESEMPENHO. No domínio do tempo. No domínio da freqüência. Função de transferência. Módulo e fase da função de transferência
 AVALIAÇÃO DE DESEMPENHO Introdução Introdução Análise no domínio do tempo Resposta ao degrau Resposta à rampa Aula anterior Resposta à parábola Análise no domínio da freqüência Diagramas de Bode Diagrama
AVALIAÇÃO DE DESEMPENHO Introdução Introdução Análise no domínio do tempo Resposta ao degrau Resposta à rampa Aula anterior Resposta à parábola Análise no domínio da freqüência Diagramas de Bode Diagrama
Data 23/01/2008. Guia do Professor. Introdução
 Guia do Professor Data 23/01/2008 Introdução A inserção de tópicos da Eletricidade nas escolas de nível básico e médio é fundamental para a compreensão de alguns fenômenos da vida moderna. Você já imaginou
Guia do Professor Data 23/01/2008 Introdução A inserção de tópicos da Eletricidade nas escolas de nível básico e médio é fundamental para a compreensão de alguns fenômenos da vida moderna. Você já imaginou
PRINCÍPIOS DA CORRENTE ALTERNADA PARTE 1. Adrielle C. Santana
 PRINCÍPIOS DA CORRENTE ALTERNADA PARTE 1 Adrielle C. Santana Vantagem da Corrente Alternada O uso da corrente contínua tem suas vantagens, como por exemplo, a facilidade de controle de velocidade de motores
PRINCÍPIOS DA CORRENTE ALTERNADA PARTE 1 Adrielle C. Santana Vantagem da Corrente Alternada O uso da corrente contínua tem suas vantagens, como por exemplo, a facilidade de controle de velocidade de motores
RAIOS E FRENTES DE ONDA
 RAIOS E FRENTES DE ONDA 17. 1, ONDAS SONORAS ONDAS SONORAS SÃO ONDAS DE PRESSÃO 1 ONDAS SONORAS s Onda sonora harmônica progressiva Deslocamento das partículas do ar: s (x,t) s( x, t) = s cos( kx ωt) m
RAIOS E FRENTES DE ONDA 17. 1, ONDAS SONORAS ONDAS SONORAS SÃO ONDAS DE PRESSÃO 1 ONDAS SONORAS s Onda sonora harmônica progressiva Deslocamento das partículas do ar: s (x,t) s( x, t) = s cos( kx ωt) m
24/Abril/2013 Aula 19. Equação de Schrödinger. Aplicações: 1º partícula numa caixa de potencial. 22/Abr/2013 Aula 18
 /Abr/013 Aula 18 Princípio de Incerteza de Heisenberg. Probabilidade de encontrar uma partícula numa certa região. Posição média de uma partícula. Partícula numa caixa de potencial: funções de onda e níveis
/Abr/013 Aula 18 Princípio de Incerteza de Heisenberg. Probabilidade de encontrar uma partícula numa certa região. Posição média de uma partícula. Partícula numa caixa de potencial: funções de onda e níveis
Aula 3 CONSTRUÇÃO DE GRÁFICOS EM PAPEL DILOG. Menilton Menezes. META Expandir o estudo da utilização de gráficos em escala logarítmica.
 Aula 3 CONSTRUÇÃO DE GRÁFICOS EM PAPEL DILOG META Expandir o estudo da utilização de gráficos em escala logarítmica. OBJETIVOS Ao final desta aula, o aluno deverá: Construir gráficos em escala di-logarítmica.
Aula 3 CONSTRUÇÃO DE GRÁFICOS EM PAPEL DILOG META Expandir o estudo da utilização de gráficos em escala logarítmica. OBJETIVOS Ao final desta aula, o aluno deverá: Construir gráficos em escala di-logarítmica.
15/02/2012. IV.2_Controle e Automação II. Introdução. Conteúdo SENSORES
 IV.2_Controle e Automação II Formando Profissionais Para o Futuro SENSORES Introdução No estudo da automação em sistemas industriais, comerciais e/ou residenciais há a necessidade de determinar as condições
IV.2_Controle e Automação II Formando Profissionais Para o Futuro SENSORES Introdução No estudo da automação em sistemas industriais, comerciais e/ou residenciais há a necessidade de determinar as condições
Tipos de malha de Controle
 Tipos de malha de Controle SUMÁRIO 1 - TIPOS DE MALHA DE CONTROLE...60 1.1. CONTROLE CASCATA...60 1.1.1. Regras para Selecionar a Variável Secundária...62 1.1.2. Seleção das Ações do Controle Cascata e
Tipos de malha de Controle SUMÁRIO 1 - TIPOS DE MALHA DE CONTROLE...60 1.1. CONTROLE CASCATA...60 1.1.1. Regras para Selecionar a Variável Secundária...62 1.1.2. Seleção das Ações do Controle Cascata e
Método Simplex Especializado para Redes
 Método Simplex Especializado para Redes Prof. Fernando Augusto Silva Marins Departamento de Produção Faculdade de Engenharia Campus de Guaratinguetá UNESP www.feg.unesp.br/~fmarins fmarins@feg.unesp.br
Método Simplex Especializado para Redes Prof. Fernando Augusto Silva Marins Departamento de Produção Faculdade de Engenharia Campus de Guaratinguetá UNESP www.feg.unesp.br/~fmarins fmarins@feg.unesp.br
Hidráulica e Pneumática
 E Curso Técnico Concomitante em Mecânica 3º módulo MSc. Acumuladores ACUMULADORES HIDRÁULICOS Objetivos da aula Estudar os tipos de acumuladores; Conhecer a simbologia dos acumuladores; Identificar suas
E Curso Técnico Concomitante em Mecânica 3º módulo MSc. Acumuladores ACUMULADORES HIDRÁULICOS Objetivos da aula Estudar os tipos de acumuladores; Conhecer a simbologia dos acumuladores; Identificar suas