Ferramentas Computacionais para Prototipagem Rápida de Sistemas Mecatrônicos
|
|
|
- Antônia Lage Amaral
- 8 Há anos
- Visualizações:
Transcrição
1 Ferramentas Computacionais para Prototipagem Rápida de Sistemas Mecatrônicos Prof. Dr. João Mauricio Rosário Laboratório de Automação Integrada e Robótica UNICAMP - Faculdade de Engenharia Mecânica rosario@fem.unicamp.br

2 Ferramentas Computacionais para Prototipagem Rápida de Sistemas Mecatrônicos Resumo Tendências importantes são observadas no projeto de máquinas e equipamentos no âmbito mundial com a utilização de sistemas computacionais e mecânica de precisão associados aos requisitos impostos de qualidade e de produtividade. São apresentadas tendências e fatores relevantes da evolução da robótica e seus periféricos, projeto, especificação e instalação.



3 Automação Industrial (Fonte: Rosário, 2004).

4 Automação Industrial (Visão Abrangente) Integração de conhecimentos substituindo a observação, esforços e decisões humanas por dispositivos (mecânicos, elétricos, entre outros) e software concebido através de especificações funcionais e tecnológicas e metodologias. (Fonte: ABDI, 2011)

5


6

7



8 (Fonte: Festo Didactic GmbH& Co, Ktistakis, 2006)

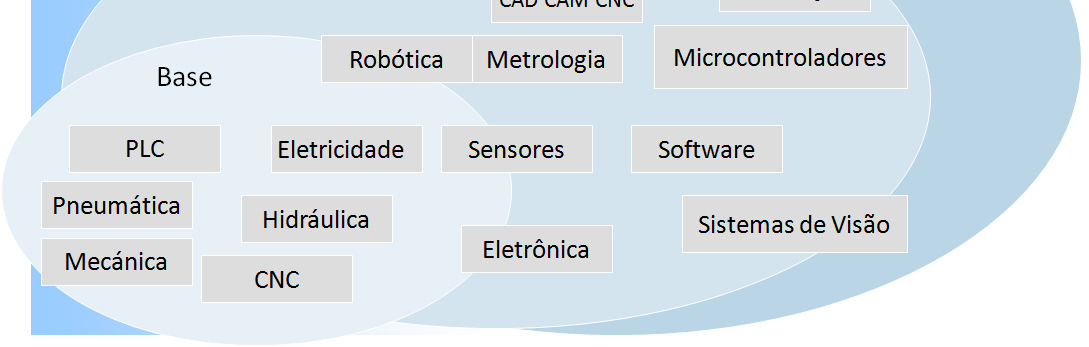
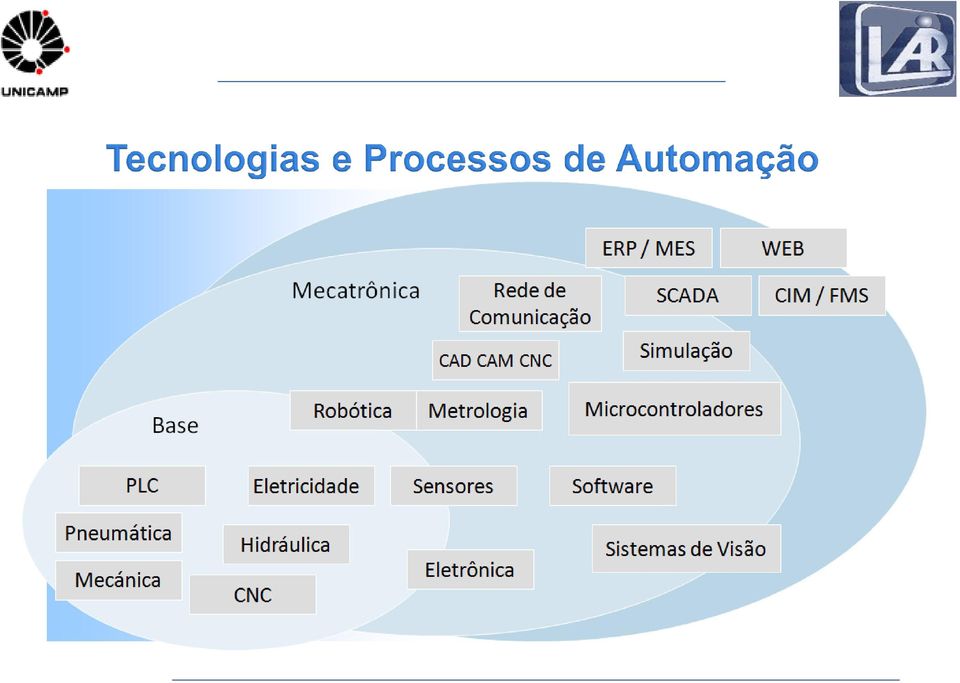
9 1. Componente Circuitos integrados, sensores, atuadores, mecanismos; 2. Máquina Máquinas de usinagem, medição, inspeção, sistemas de movimentação, embalagem; 3. Sistema 3. Sistema FMS Sistemas Flexíveis de Manufatura, FAS Sistema de Automação de Fabrica, CIM Sistemas Integrados de Manufatura.

10 Nível 6: Gestão e Gerenciamento da Produção Industrial. Nível 5: Controle de Processos Industriais; Nível 4: Células Integradas de Automação da Manufatura; Nível 3: Gerenciamento: Servidores e Estações de Trabalhos; Nível 2: Equipamentos e Máquinas Industriais; Nível 1: Chão de Fábrica constituído de sensores e atuadores Industriais; (Fonte: Festo Didactic GmbH& Co, Ktistakis, 2006)

11

12 Simplificação do sistema mecânico; Redução de tempo e de custo de desenvolvimento; Facilidade de se introduzir modificações ou novas capacidades; Flexibilidade para receber futuras modificações ou novas funcionalidades.

13 Flexibilidade de operação: programabilidade; Inteligência: capacidade para sensoriamento e processamento das informações, permitindo assim, a adaptação a diferentes condições de operação; Auto-monitoramento e prevenção ativa de acidentes; Auto-diagnóstico em caso de falhas; Redução do custo de manutenção e consumo de energia; Elevado grau de precisão e confiabilidade.

")
14 Ciclo de Desenvolvimento de um produto (IFAC, 2008) 14
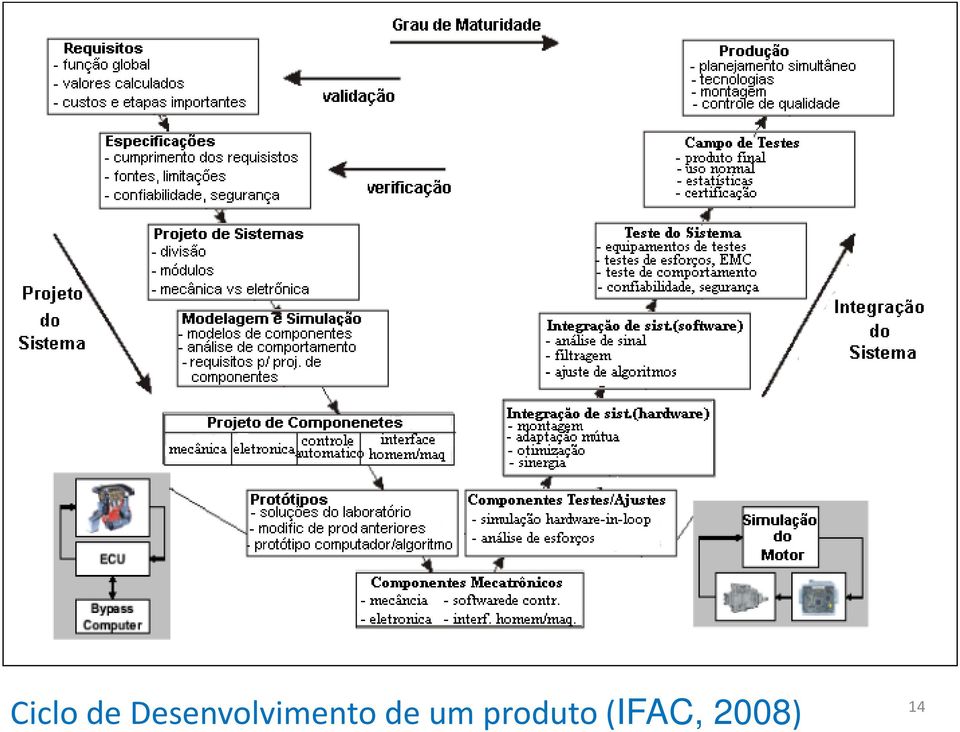
15 Integração de conhecimentos de áreas tradicionais como a Engenharia Mecânica, Eletrônica, Controle e Computação de forma integrada e concorrente...

16 Máquina de manipulação com vários graus de liberdade, controlada automaticamente, reprogramável, multifuncional, que pode ter base fixa ou móvel para a utilização em aplicações de automação industrial Fonte: Norma técnica ISO O campo da Robótica Industrial pode ser definido como o estudo, desenvolvimento e uso de Sistemas Robóticos para a Manufatura. As aplicações típicas dos Robôs Industriais incluem fundição, pintura, soldagem, montagem, movimentação de cargas, inspeção de produtos, e realização de teste, tudo realizado com uma precisão, velocidade, e robustez relativamente elevadas. ISO: International Organization for Standardization

17 Robótica no Contexto da Automação Integrada Evolução Robótica Colaborativa Robótica Humanóide Robótica Serial e Paralela Integração 17

18 Sistemas Robóticos Concepção Cinemática Acionamento e Controle Robótica Industrial Dispositivos e Sistemas Ferramentas e Dispositivos Garras e Ferramentas Biomecatrônica 18

19 Robótica Industrial Dispositivos e Sistemas Sistemas Robóticos Concepção Cinemática Acionamento e Controle Concepção Cinemática Serial Paralelos Móveis Humanóides Ferramentas e Dispositivos Garras e Ferramentas Biomecatrônica 19

20 Robótica Industrial Dispositivos e Sistemas Sistemas Robóticos Concepção Cinemática Acionamento e Controle Concepção Cinemática Serial Paralelos Móveis Humanóides Ferramentas e Dispositivos Garras e Ferramentas Biomecatrônica 20

21 Sistemas Robóticos Concepção Cinemática Acionamento e Controle Robótica Industrial Dispositivos e Sistemas Sistema de Acionamento e Controle Sistema de Acionamento e Transmissão Mecânica Sensores e Atuadores Dinâmica e Estrutura de Controle Ferramentas e Dispositivos Antropomórficos Garras e Ferramentas Biomecatrônica 21
22 Sistemas Robóticos Concepção Cinemática Acionamento e Controle Robótica Industrial Dispositivos e Sistemas Sistema de Acionamento e Controle Sistema de Acionamento e Transmissão Mecânica Sensores e Atuadores Dinâmica e Estrutura de Controle Ferramentas e Dispositivos Antropomórficos Garras e Ferramentas Biomecatrônica 22
23 Sistemas Robóticos Concepção Cinemática Acionamento e Controle Robótica Industrial Dispositivos e Sistemas Ferramentas e Dispositivos Antropomórficos Garras e Ferramentas Biomecatrônica 23
24 Planejamento Atuadores Sensores Controlador Mecanismo Robô SCARA (RRP) Robô coordenadas polares (RRP) Mesa coordenadas cartesianas (PPP) Robô coordenadas cilíndricas (RPP)
25 Planejamento Atuadores Sensores Controlador Mecanismo Robôs Paralelos Orthoglide(Pashkevich et al., 2006) Eye Eagle (Gosselin et al. 1999) Delta (ABB FlexPicker-IRB340) HEXA (Toyoda) Plataforma Stewart
26 Planejamento Atuadores Sensores Controlador Mecanismo Robô com Estrutura Serial x Paralelo
27 Planejamento Atuadores Sensores Controlador Mecanismo Robôs móveis Robotino(FESTO) Rocky IV (NASA) Rocky IV (NASA) Asuro Electrolux (2 milhões de limpadores vendidos
28 Planejamento Atuadores Sensores Controlador Mecanismo Robôs Aéreos Configuração Tradicional Global Hawck Trirotor Dualrotor
29 Planejamento Atuadores Sensores Controlador Mecanismo Starmac DragonFlyerTi Quadrotor
30 Planejamento Atuadores Sensores Controlador Mecanismo Robôs Móveis Estrutura Mecânica Rodas Onidirecionais; 3 motores DC com redutores; Mobilidade em qualquer direção; Chassis em aço com barra protetora de borracha; Fácil acesso às baterias; Fácil acesso à rodas, motores e transmissão; Sensores: 9 sensores infra-vermelho para distância Sensor indutivo analógico Sistema de Visão -câmera Web USB Sensores ópticos digitais Plataforma aberta para inserção de outros sensores: Sensores ultra-sônicos Sensor de Navegação 8 entradas e saídas digitais 10 entradas analógicas 2 relês
31 Planejamento Atuadores Sensores Controlador Mecanismo Robôs Móveis Arquitetura de Controle
32 Planejamento Atuadores Sensores Controlador Mecanismo Robô Humanóide 32
33 Planejamento Atuadores Sensores Controlador Mecanismo Robôs Humanóides
34 Planejamento Atuadores Sensores Controlador Mecanismo Robô Humanóide Nao 34
35 Planejamento Atuadores Sensores Controlador Mecanismo Robôs Especiais Roque (UFES, BRASIL) 35
36 Planejamento Atuadores Sensores Controlador Mecanismo Acionamento elètrico Critérios utilizados para Seleção de Motores Características Positivas Características Negativas Aplicações Motor de Passo (Stepper Motors) Baixo Custo Não necessita de realimentação de posição Bom torque até o final do curso a baixa velocidade Bom para posicionamento básico Apresenta ruído e ressonância; Apresenta torque ruim a altas velocidades; Não é bom para cargas variáveis. Posicionamento Micromovimento Brushed Motors (Motor com Escovas) Custo Relativamente Baixo Velocidade Moderada Usa drives simples Necessita manutenção; Não é bom para ambientes limpos; Apresenta faíscas elétricas; Requer realimentação. Controle de Velocidade Controle de alto desempenho Brushless Motors (Motor sem Escovas) Sem manutenção Longo tempo de vida Alta velocidade Bom para ambientes limpos Alto custo; Usa drives mais complicados; Requer realimentação. Robótica Pick and place Torque muito alto ou aplicações rápidas 36
37 Planejamento Atuadores Sensores Controlador Mecanismo Tipos de Sistemas de transmissão mecânica 37
38 Planejamento Atuadores Sensores Controlador Mecanismo ROBÔ INDUSTRIAL SISTEMA DE ACIONAMENTO E CONTROLE 38
39 Planejamento Atuadores Sensores Controlador Mecanismo Estrutura de Controle de um Robô Industrial 39
40 Planejamento Atuadores Sensores Controlador Mecanismo 40
41 Planejamento Atuadores Sensores Controlador Mecanismo O objetivo das ferramentas é realizar uma ação ou trabalho sobre uma peça, como soldar, pintar, cortar. Soldagem por arco Soldagem por pontos Corte com jato de água 41
42 Planejamento Atuadores Sensores Controlador Mecanismo Efetuadores finais Têm como vantagem projeto mecânico de concepção simples confiabilidade custos de manutenção reduzidos. Diferentes tarefas, com a utilização de um único robô numero variado de opções com diferentes efetuadores finais. 42
43 Planejamento Atuadores Sensores Controlador Mecanismo Garras antropomórficas A mão humana efetuador final com grande destreza diferentes objetos ferramentas em diversas atividades. 43
44 Planejamento Atuadores Sensores Controlador Mecanismo Dispositivos Biomecatrônicos 44
45 Planejamento Atuadores Sensores Controlador Mecanismo 45
46 Planejamento Atuadores Sensores Controlador Mecanismo Próteses e Órteses Antropomórficas Estáticas ou Não funcionais Membros Superiores Membros Inferiores Membros Superiores Mioelétricas Híbridas 46
47 Planejamento Atuadores Sensores Controlador Mecanismo Dispositivos de Locomoção 47
48 Robótica Industrial Integração e Tecnologias Prototipagem Rápida Integração de Sistemas Realidade Virtual Sistema Embarcado Cadeia Produtiva Teleoperação Programação Offline Segurança e Manutenção Sistema de Inspeção 48
49 Planejamento Atuadores Sensores Controlador Mecanismo Modelagem de sistemas a eventos REDE DE PETRI GRAFCET 49
50 Prototipagem Rápida de Sistemas Mecatrônicos A prototipagem rápida pode ser definida com o conjunto de metodologias (associadas a ferramentas) que permitem a construção de protótipos computacionais de uma maneira econômica e segura, reduzindo custos e o ciclo de concepção de um produto. Dentre as principais vantagens da utilização de Sistemas de Prototipagem Rápida em Mecatrônica podemos citar as seguintes: Detecção mais rápida de possíveis erros decorrentes da fase de implementação de um projeto, acarretando um menor custo de correção e/ou modificação do projeto, Concepção dentro de um ambiente de simulação e prototipagem comum, acarretando de tal modo na economia no desenvolvimento do projeto atual e de futuros projetos, Ambiente apropriado para Engenharia Colaborativa, com forte integração e conceito de equipe de trabalho.
 Visualização do modelo funcional c) Descrição funcional do software/hardware a ser implementado.")
51 Prototipagem Rápida de Sistemas Mecatrônicos A prototipagem rápida, que pode ser feita em vários níveis de abstração, três fases se apresentam como representantes deste ciclo integrado: a) Modelagem do sistema físico, b) Visualização do modelo funcional c) Descrição funcional do software/hardware a ser implementado. d) Simulação Inicialmente, esse conceito era muito utilizado anteriormente para a construção de protótipos de peças mecânicas a partir de um projeto desenvolvido em CAD (Computer Aided Design) ou da implementação de componentes eletrônicos em FPGA s a partir de um CAD de eletrônica. Mais recentemente, esse conceito é utilizado de forma mais ampla, envolvendo a concepção de todo um projeto de um sistema mecatrônico desde as fases de modelagem, simulação e arquitetura de controlador até a sua implementação final em hardware dedicado.
52 Planejamento Atuadores Sensores Controlador Mecanismo Prototipagem Rápida em Célula Flexível de Manufatura O conceito de prototipagem rápida em células flexíveis de manufatura refere-se à integração de diferentes dispositivos em células automatizadas de manufatura. Prototipagem Mecânica Prototipagem Rápida Prototipagem Elétrica Prototipagem Virtual 52
53 Planejamento Atuadores Sensores Controlador Mecanismo Modelagem CAD 53
54 Planejamento Atuadores Sensores Controlador Mecanismo Programação Offline 54
55 Planejamento Atuadores Sensores Controlador Mecanismo Teleoperação: Técnicas utilizadas para manipular objetos e efetuar operações a distância, por exemplo uma pessoa comanda um robô distante. 55
56 Planejamento Atuadores Sensores Controlador Mecanismo Teleoperação: 56
57 Arquiteturas de Controle em Sistemas Embarcados na Prototipagem Rápida 57
58 Tempo de produção Custos Planejamento Introdução Sistemas de Controle Desenvolvimento da arquitetura de controle Modelos integrados em Tempo Real Simulação & Emulação Desenvolvimento do produto 58
59 Etapas do desenvolvimento de Sistemas de Controle 59
60 Sistemas de Controle Baseado no Modelo 1. Analise do sistema. 2. Projeto do controlador: modelos do controlador são desenvolvidos e testados pela simulação. 3. Implementação: O código C-code, para sistemas embebidos é automaticamente gerado para os modelos de controle. 4. Test: O código é executado desde uma placa eletrônica como unidade de Controle ECU (Electronic Control Unit. 5. Ajuste: Modelo e emulação do sistema atual. 60
61 Sistemas de Controle Baseado no Modelo 61
62 Integração de sistemas de controle Baseado no Modelo Software in the Loop SIL Process in the Loop Modelin theloop PIL Integração de Controladores Malha Fechada MIL HIL Hardware in the Loop
63 Conceitos M-S-P-H-In TheLoop 63
64 Planejamento Atuadores Sensores Controlador Mecanismo Simulação hardware-in-the-loop 64
65 Conceitos M-S-P-H-In TheLoop 65
66 MIL: Modelin theloop O modelo existe na ferramenta de simulação (Simulink- Stateflow) Ótimo para desenvolver algoritmos de controle 66
67 SIL: Software in theloop O modelo existe na ferramenta de simulação (Simulink- Stateflow) e parte em código de execução C-code, S-funtion Ótimo para desenvolver algoritmos de controle 67
68 HIL: Hardware in theloop Parte do modelo é executado no simulador em tempo real, e a outra parte esta no hardware físico. Ótimo para testes e interação com o hardware. 68
69 PIL: Processorin theloop No teste dos modelos é feito utilizando placas com processadores embarcados. 69
70 Conceitos M-S-P-H-In TheLoop
71
72 Ferramentas para simulação e emulação MATLAB Simscape SimHydraulics SimMechanics SimDriveline SimElectronics SimPowerSyst ems modelagem de mecânica básica, sistemas elétricos e hidráulicos modelagemde sistemas hidráulicos modelagem tridimensional de sistemas mecânicos modelagem de sistemas de transmissão de automóveis modelagemde circuitos eletrônicos modelagem de sistemas de energia, acionamentos e eletrônica de potência
73 Planejamento Atuadores Sensores Controlador Mecanismo Simulador Virtual


74 Planejamento Atuadores Sensores Controlador Mecanismo Simulador Virtual (Cinemático + Dinâmico) 74
75 LABVIEW 75
76 MODELICA

77 Dispositivos 77
78 Arquiteturas de Controle em sistemas embarcados TIPO PID FUZZY PID-FUZZY FUZZY HÍBRIDO PREDITIVO REDE NEURAL ADAPTATIVO(PREDITIVO) CONTROLE COM OBSERVADORES E OTIMIZAÇÃO NÃO LINEAR OPTIMAL FRACTIONAL ORDER PROPORTIONAL INTEGRAL (OFOPI)
79 ETAPAS PID 1.PROJETO Implementação de um controlador PID embarcado para o controle em malha fechada de um estimulador neuromuscular funcional 2.MODELAGEM 3.ESTRUTURA SOFTWARE- HARDWARE 1. MATLAB 2. PROTEUS 3. Microcontrolador PIC18F IMPLEMENTAÇÃO
80 Controlador PID embarcado 1. Modelo do sistema 2. Controlador PID
81 Controlador PID embarcado 3. Características digitais: Tamanho da palavra: Microcomputadores com tamanhos de palavra de 8, 16 ou 32 bits Resolução dos conversores A/D-D/A: Resolução básica dos conversores D/A é em torno de 10 bits e dos conversores A/D é de 8 a 16 bits Resolução mínima do conversor AD Resolução mínima do conversor DA
82 Controlador PID embarcado 4. PID digital-simulação:
83 Controlador PID embarcado 5. PID-Emulação no sistema embarcado: P= K*erro I= I_ant+{K*T}*{2*T_i}*(erro+erro_ant}/{(2*T_i)} D= (pt-2)/(pt+2)}*d_ant+ (2*K*T_d)/(T*(pT+2))*(erro-erro_ant) sinal_controle= P + I + D erro_ant=erro D_ant= D
84 Ferramentas Computacionais para Prototipagem Rápida de Sistemas Mecatrônicos Prof. Dr. João Maurício Rosário Obrigado pela atenção
CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE
 CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE Roland Yuri Schreiber 1 ; Tiago Andrade Camacho 2 ; Tiago Boechel 3 ; Vinicio Alexandre Bogo Nagel 4 INTRODUÇÃO Nos últimos anos, a área de Sistemas
CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE Roland Yuri Schreiber 1 ; Tiago Andrade Camacho 2 ; Tiago Boechel 3 ; Vinicio Alexandre Bogo Nagel 4 INTRODUÇÃO Nos últimos anos, a área de Sistemas
CAPACITAÇÃO EM NOVAS TECNOLOGIAS: Um desafio constante. (A Mecatrônica como exemplo do estado da arte)
") CAPACITAÇÃO EM NOVAS TECNOLOGIAS: Um desafio constante. (A Mecatrônica como exemplo do estado da arte) SESTINFO-2008 São Bernardo do Campo/março/2008 Áreas da Tecnologia que estão definindo nosso Futuro
CAPACITAÇÃO EM NOVAS TECNOLOGIAS: Um desafio constante. (A Mecatrônica como exemplo do estado da arte) SESTINFO-2008 São Bernardo do Campo/março/2008 Áreas da Tecnologia que estão definindo nosso Futuro
Tecnologia de Comando Numérico 164399
 164399 Aula 2 Introdução à Automação da Manufatura Mecatrônica; Automação; Níveis de Automação; Tipos de Automação; Justificativas para automatizar; Justificativas para não automatizar; Prof. Edson Paulo
164399 Aula 2 Introdução à Automação da Manufatura Mecatrônica; Automação; Níveis de Automação; Tipos de Automação; Justificativas para automatizar; Justificativas para não automatizar; Prof. Edson Paulo
COMISSIONAMENTO VIRTUAL
 COMISSIONAMENTO VIRTUAL Tales Gustavo Vieira tales@ita.br Diego Vedolin diego.vedolin@siemens.com Instituto Tecnológico de Aeronáutica ITA Centro de Competência em Manufatura CCM Siemens Instituto Tecnológico
COMISSIONAMENTO VIRTUAL Tales Gustavo Vieira tales@ita.br Diego Vedolin diego.vedolin@siemens.com Instituto Tecnológico de Aeronáutica ITA Centro de Competência em Manufatura CCM Siemens Instituto Tecnológico
Sensores. Sensor. Passivos: Chave Potenciômetro Energia Auxiliar. Ativos: Célula Fotoelétrica Cristal Piezoelétrico. Digitais: Encoder Régua Óptica
 Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Sensores Passivos: Chave Potenciômetro Energia Auxiliar Ativos: Célula Fotoelétrica Cristal Piezoelétrico Entrada Sensor Saída Analógicos: Potenciômetro Resolver Digitais: Encoder Régua Óptica Prof. Silas
Projeto de controle e Automação de Antena
 Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
APLICAÇÕES INDUSTRIAIS DE ROBÔS
 Material de estudo APLICAÇÕES INDUSTRIAIS DE ROBÔS 2010 Lívia F. Silva Mendes APLICAÇÕES INDUSTRIAIS DE ROBÔS Os robôs têm vindo a ser utilizados numa gama muito variada de aplicações industriais. As primeiras
Material de estudo APLICAÇÕES INDUSTRIAIS DE ROBÔS 2010 Lívia F. Silva Mendes APLICAÇÕES INDUSTRIAIS DE ROBÔS Os robôs têm vindo a ser utilizados numa gama muito variada de aplicações industriais. As primeiras
Fundamentos de Automação
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Conceito,
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Conceito,
Automação Industrial Parte 2
 Automação Industrial Parte 2 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Perspectiva Histórica Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
Automação Industrial Parte 2 Prof. Ms. Getúlio Teruo Tateoki http://www.getulio.eng.br/meusalunos/autind.html Perspectiva Histórica Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
Tecnologia de controle para máquinas operatrizes móbil.
 Tecnologia de controle para máquinas operatrizes móbil. HYDAC Matriz na Alemanha Seu parceiro competente para máquinas operatrizes móbil. HYDAC Itália HYDAC Holanda HYDAC França HYDAC Coréia HYDAC China
Tecnologia de controle para máquinas operatrizes móbil. HYDAC Matriz na Alemanha Seu parceiro competente para máquinas operatrizes móbil. HYDAC Itália HYDAC Holanda HYDAC França HYDAC Coréia HYDAC China
Ano Letivo 2015/2016 Ciclo de Formação: 2013-2016 Nº DO PROJETO: POCH-01-5571-FSE-000424 AUTOMAÇÃO E COMANDO,12ºANO PLANIFICAÇÃO ANUAL
 COMANDO AGRUPAMENTO de ESCOLAS Nº1 de SANTIAGO do CACÉM CURSO PROFISSIONAL DE TÉCNICO DE ELETRÓNICA AUTOMAÇÃO E Ano Letivo 2015/2016 Ciclo de Formação: 2013-2016 Nº DO PROJETO: POCH-01-5571-FSE-000424
COMANDO AGRUPAMENTO de ESCOLAS Nº1 de SANTIAGO do CACÉM CURSO PROFISSIONAL DE TÉCNICO DE ELETRÓNICA AUTOMAÇÃO E Ano Letivo 2015/2016 Ciclo de Formação: 2013-2016 Nº DO PROJETO: POCH-01-5571-FSE-000424
Curso Superior de Tecnologia em Automação Industrial. Curso Superior de Tecnologia em Construção Naval
 Automação Industrial Indústria O Tecnólogo em Automação Industrial é um profissional a serviço da modernização das técnicas de produção utilizadas no setor industrial, atuando na execução de projetos,
Automação Industrial Indústria O Tecnólogo em Automação Industrial é um profissional a serviço da modernização das técnicas de produção utilizadas no setor industrial, atuando na execução de projetos,
SIM V.T 3D Software de simulação completo para treinamento dos futuros Técnicos e Engenheiros
 SIM V.T 3D Software de simulação completo para treinamento dos futuros Técnicos e Engenheiros Solução em software exclusivo, o SIM V.T 3D oferece um design intuitivo, animações em 3D, animação virtual
SIM V.T 3D Software de simulação completo para treinamento dos futuros Técnicos e Engenheiros Solução em software exclusivo, o SIM V.T 3D oferece um design intuitivo, animações em 3D, animação virtual
UNIVERSIDADE FEDERAL DE PERNAMBUCO - PRÓ-REITORIA PARA ASSUNTOS ACADÊMICOS CURRÍCULO DO CURSO DE GRADUAÇÃO EM ENGENHARIA DA COMPUTAÇÃO PERFIL
 PERFIL 3001 - Válido para os alunos ingressos a partir de 2002.1 Disciplinas Obrigatórias Ciclo Geral Prát IF668 Introdução à Computação 1 2 2 45 MA530 Cálculo para Computação 5 0 5 75 MA531 Álgebra Vetorial
PERFIL 3001 - Válido para os alunos ingressos a partir de 2002.1 Disciplinas Obrigatórias Ciclo Geral Prát IF668 Introdução à Computação 1 2 2 45 MA530 Cálculo para Computação 5 0 5 75 MA531 Álgebra Vetorial
Introdução à Engenharia de Automação
 Introdução à Engenharia de Automação 1 A automação em nossas vidas Objetivo: Facilitar nossas vidas Automação no dia-a-dia Em casa: Lavando roupa Abrindo o portão Lavando louça Na rua: Sacando dinheiro
Introdução à Engenharia de Automação 1 A automação em nossas vidas Objetivo: Facilitar nossas vidas Automação no dia-a-dia Em casa: Lavando roupa Abrindo o portão Lavando louça Na rua: Sacando dinheiro
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO. Profª Danielle Casillo
 UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Profª Danielle Casillo Nome: Automação e Controle Créditos: 4 60 horas Período: 2010.2 Horário: quartas e sextas das 20:40 às 22:20
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Profª Danielle Casillo Nome: Automação e Controle Créditos: 4 60 horas Período: 2010.2 Horário: quartas e sextas das 20:40 às 22:20
AUTOMAҪÃO INDUSTRIAL E LINHAS DE PRODUҪÃO FLEXÍVEIS
 CENTRO FEDERAL DE ENSINO TECNOLÓGICO MG CONTEXTO SOCIAL E PROFISSIONAL DA ENGENHARIA MECATRÔNICA AUTOMAҪÃO INDUSTRIAL E LINHAS DE PRODUҪÃO FLEXÍVEIS COMPONENTES: Guilherme Márcio Matheus Sakamoto Rafael
CENTRO FEDERAL DE ENSINO TECNOLÓGICO MG CONTEXTO SOCIAL E PROFISSIONAL DA ENGENHARIA MECATRÔNICA AUTOMAҪÃO INDUSTRIAL E LINHAS DE PRODUҪÃO FLEXÍVEIS COMPONENTES: Guilherme Márcio Matheus Sakamoto Rafael
5 Sistema Experimental
 5 Sistema Experimental Este capitulo apresenta o sistema experimental utilizado e é composto das seguintes seções: - 5.1 Robô ER1: Descreve o robô utilizado. É dividida nas seguintes subseções: - 5.1.1
5 Sistema Experimental Este capitulo apresenta o sistema experimental utilizado e é composto das seguintes seções: - 5.1 Robô ER1: Descreve o robô utilizado. É dividida nas seguintes subseções: - 5.1.1
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
Fundamentos de Automação. Controladores
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Controladores
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação Controladores
1. CAPÍTULO COMPUTADORES
 1. CAPÍTULO COMPUTADORES 1.1. Computadores Denomina-se computador uma máquina capaz de executar variados tipos de tratamento automático de informações ou processamento de dados. Os primeiros eram capazes
1. CAPÍTULO COMPUTADORES 1.1. Computadores Denomina-se computador uma máquina capaz de executar variados tipos de tratamento automático de informações ou processamento de dados. Os primeiros eram capazes
UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO. Professor Leonardo Gonsioroski
 UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO Objetivos da Aula Diferenciar automação da mecanização. Posicionar a automação industrial no contexto histórico. Classificar os tipos
UNIVERSIDADE CEUMA CAMPUS RENASCENÇA CURSO DE ENGENHARIA DE PRODUÇÃO Objetivos da Aula Diferenciar automação da mecanização. Posicionar a automação industrial no contexto histórico. Classificar os tipos
Engenharia de Sistemas Computacionais
 Engenharia de Sistemas Detalhes no planejamento UNIVERSIDADE FEDERAL DE ALAGOAS Curso de Ciência da Computação Engenharia de Software I Prof. Rômulo Nunes de Oliveira Introdução Na aplicação de um sistema
Engenharia de Sistemas Detalhes no planejamento UNIVERSIDADE FEDERAL DE ALAGOAS Curso de Ciência da Computação Engenharia de Software I Prof. Rômulo Nunes de Oliveira Introdução Na aplicação de um sistema
Sensores e Atuadores (2)
") (2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
(2) 4º Engenharia de Controle e Automação FACIT / 2009 Prof. Maurílio J. Inácio Atuadores São componentes que convertem energia elétrica, hidráulica ou pneumática em energia mecânica. Através dos sistemas
As melhores soluções para sua Automação. Inversores de Freqüência Soft-Starters Servoacionamentos Controladores Programáveis
 As melhores soluções para sua Automação Inversores de Freqüência Soft-Starters Servoacionamentos Controladores Programáveis Disponíveis em nosso site www.weg.com.br Softwares WEG Automação Alguns dos softwares
As melhores soluções para sua Automação Inversores de Freqüência Soft-Starters Servoacionamentos Controladores Programáveis Disponíveis em nosso site www.weg.com.br Softwares WEG Automação Alguns dos softwares
Desenho Técnico Fundamentos do desenho técnico; Construções geométricas; Desenho eletroeletrônico;
 EMENTA DE CONTEÚDOS Eletricidade Conceitos fundamentais da eletricidade; Circuitos elétricos de corrente contínua; Tensão alternada; Gerador de funções; Operação do osciloscópio; Tensão e corrente alternadas
EMENTA DE CONTEÚDOS Eletricidade Conceitos fundamentais da eletricidade; Circuitos elétricos de corrente contínua; Tensão alternada; Gerador de funções; Operação do osciloscópio; Tensão e corrente alternadas
A automação em nossas vidas 25/10/2015. Módulo IV Tecnologia. TECNOLOGIA Conceito e História
 Módulo IV Tecnologia Danillo Tourinho S. da Silva, M.Sc. TECNOLOGIA Conceito e História A automação em nossas vidas Objetivo: Facilitar nossas vidas no dia-a-dia Em casa: Lavando roupa Esquentando leite
Módulo IV Tecnologia Danillo Tourinho S. da Silva, M.Sc. TECNOLOGIA Conceito e História A automação em nossas vidas Objetivo: Facilitar nossas vidas no dia-a-dia Em casa: Lavando roupa Esquentando leite
Sistemas Embarcados. Introdução aos sistemas embarcados
 Sistemas Embarcados Introdução aos sistemas embarcados Introdução aos Sistemas embarcados Definição de um sistema embarcado Exemplos de sistemas embarcados Processadores utilizados em sistemas embarcados
Sistemas Embarcados Introdução aos sistemas embarcados Introdução aos Sistemas embarcados Definição de um sistema embarcado Exemplos de sistemas embarcados Processadores utilizados em sistemas embarcados
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
Curso Automação Industrial Aula 3 Robôs e Seus Periféricos. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos
Curso Automação Industrial Aula 3 Robôs e Seus Periféricos Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs Robôs e seus Periféricos
AUTOMAÇÃO INDUSTRIAL INTRODUÇÃO A ROBÓTICA
 AUTOMAÇÃO INDUSTRIAL INTRODUÇÃO A ROBÓTICA CONTEÚDO PROGRAMÁTICO Microcontroladores - Hardware Microcontroladores - Software Visão Geral de um Robô Manipulador Constituição Básica de um Robô Industrial
AUTOMAÇÃO INDUSTRIAL INTRODUÇÃO A ROBÓTICA CONTEÚDO PROGRAMÁTICO Microcontroladores - Hardware Microcontroladores - Software Visão Geral de um Robô Manipulador Constituição Básica de um Robô Industrial
Empilhadoras Elétricas IXION SPE125/SPE160. Controle Sensi-lift
 Empilhadoras Elétricas Os empilhadores com braços de suporte oferecem uma solução efetiva e econômica para todos os tipos de armazém grandes ou pequenos. A BT oferece o grupo mais completo de empilhadores
Empilhadoras Elétricas Os empilhadores com braços de suporte oferecem uma solução efetiva e econômica para todos os tipos de armazém grandes ou pequenos. A BT oferece o grupo mais completo de empilhadores
TÍTULO: EMBALADORA DE TABULEIROS DE DAMAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA: ENGENHARIAS
 Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: EMBALADORA DE TABULEIROS DE DAMAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA:
Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: EMBALADORA DE TABULEIROS DE DAMAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA:
SISTEMA DE RASTREIO ÓPTICO
 SISTEMA DE RASTREIO ÓPTICO 1 SISTEMA DE RASTREIO ÓPTICO VISÃO GERAL O Sistema de Rastreio Óptico, ou simplesmente SISROT, foi desenvolvido com o objetivo de rastrear foguetes nos primeiros instantes de
SISTEMA DE RASTREIO ÓPTICO 1 SISTEMA DE RASTREIO ÓPTICO VISÃO GERAL O Sistema de Rastreio Óptico, ou simplesmente SISROT, foi desenvolvido com o objetivo de rastrear foguetes nos primeiros instantes de
DIAGNÓSTICO E DEFINIÇÃO DE SOLUÇÕES
 Somos uma empresa brasileira, especializada em soluções de automação de máquinas e processos industriais, instalação, comissionamento e segurança de infraestrutura elétrica e de máquinas, microgeração
Somos uma empresa brasileira, especializada em soluções de automação de máquinas e processos industriais, instalação, comissionamento e segurança de infraestrutura elétrica e de máquinas, microgeração
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA
 FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs. Prof. Giuliano Gozzi Disciplina: CNC - Robótica
 Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Curso Automação Industrial Aula 2 Estrutura e características Gerais dos Robôs Prof. Giuliano Gozzi Disciplina: CNC - Robótica Cronograma Introdução a Robótica Estrutura e Características Gerais dos Robôs
Uma Arquitetura Distribuída de Hardware e Software para Controle de um Robô Móvel Autônomo
 Uma Arquitetura Distribuída de Hardware e Software para Controle de um Robô Móvel Autônomo rbritto@dca.ufrn.br Orientador: Adelardo A. D. Medeiros adelardo@dca.ufrn.br - Universidade Federal do Rio Grande
Uma Arquitetura Distribuída de Hardware e Software para Controle de um Robô Móvel Autônomo rbritto@dca.ufrn.br Orientador: Adelardo A. D. Medeiros adelardo@dca.ufrn.br - Universidade Federal do Rio Grande
Controle Supervisório e Aquisição de Dados (SCADA) Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED
 Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED") Controle Supervisório e Aquisição de Dados (SCADA) Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED Yuri Kaszubowski Lopes Roberto Silvio Ubertino Rosso Jr. UDESC 24 de Abril de
Controle Supervisório e Aquisição de Dados (SCADA) Sistema de Execução da Manufatura MES Sistemas a Eventos Discretos (SED Yuri Kaszubowski Lopes Roberto Silvio Ubertino Rosso Jr. UDESC 24 de Abril de
Automação industrial Sensores
 Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Automação industrial Sensores Análise de Circuitos Sensores Aula 01 Prof. Luiz Fernando Laguardia Campos 3 Modulo Feliz aquele que transfere o que sabe e aprende o que ensina Cora Coralina O que são sensores?
Sistemas de Automação
 Sistemas de Automação Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em Engenharia
Sistemas de Automação Introdução Walter Fetter Lages w.fetter@ieee.org Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica Programa de Pós-Graduação em Engenharia
Composição do MDK-Prog e MDK-Prog Plus
 A Modelix Robotics está lançando no mercado brasileiro dois kits de Robótica aplicada, ideal para quem deseja iniciar o aprendizado de programação de robôs e eletrônica, usando o Software Modelix System
A Modelix Robotics está lançando no mercado brasileiro dois kits de Robótica aplicada, ideal para quem deseja iniciar o aprendizado de programação de robôs e eletrônica, usando o Software Modelix System
Comandos Eletro-eletrônicos SENSORES
 Comandos Eletro-eletrônicos SENSORES Prof. Roberto Leal Sensores Dispositivo capaz de detectar sinais ou de receber estímulos de natureza física (tais como calor, pressão, vibração, velocidade, etc.),
Comandos Eletro-eletrônicos SENSORES Prof. Roberto Leal Sensores Dispositivo capaz de detectar sinais ou de receber estímulos de natureza física (tais como calor, pressão, vibração, velocidade, etc.),
Desenvolva aplicações mais eficientes de teste estrutural e bancos de teste
 Desenvolva aplicações mais eficientes de teste estrutural e bancos de teste Alisson Kokot Engenheiro de Vendas - National Instruments Arquiteturas de medição condicionada Centralizada Distribuída Sala
Desenvolva aplicações mais eficientes de teste estrutural e bancos de teste Alisson Kokot Engenheiro de Vendas - National Instruments Arquiteturas de medição condicionada Centralizada Distribuída Sala
PROTÓTIPOS DA LINHA LEGO MINDSTORMS PARA AUXÍLIO NO ENSINO/APRENDIZAGEM PROGRAMAÇÃO
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE CAMPUS CURRAIS NOVOS UTILIZAÇÃO DE PROTÓTIPOS DA LINHA LEGO MINDSTORMS PARA AUXÍLIO NO ENSINO/APRENDIZAGEM DA DISCIPLINA DE PROGRAMAÇÃO
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DO RIO GRANDE DO NORTE CAMPUS CURRAIS NOVOS UTILIZAÇÃO DE PROTÓTIPOS DA LINHA LEGO MINDSTORMS PARA AUXÍLIO NO ENSINO/APRENDIZAGEM DA DISCIPLINA DE PROGRAMAÇÃO
Título: Controle de um sistema Bola- Barra com realimentação através de imagem
 Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
CONSTRUÇÃO DE UM ROBÔ TERRESTRE CONTROLADO REMOTAMENTE UTILIZANDO A PLATAFORMA ARDUINO
 CONSTRUÇÃO DE UM ROBÔ TERRESTRE CONTROLADO REMOTAMENTE UTILIZANDO A PLATAFORMA ARDUINO Leopoldo Jacobsen¹, Wyllian Fressatti¹ ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil leopoldojacobsen@gmail.com,
CONSTRUÇÃO DE UM ROBÔ TERRESTRE CONTROLADO REMOTAMENTE UTILIZANDO A PLATAFORMA ARDUINO Leopoldo Jacobsen¹, Wyllian Fressatti¹ ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil leopoldojacobsen@gmail.com,
CATÁLOGO DE REQUISITOS DE TITULAÇÃO PROCESSO SELETIVO 5629/2015
 CATÁLOGO DE REQUISITOS DE TITULAÇÃO PROCESSO SELETIVO 5629/2015 1. Controle e Automação Industrial (Instrumentação) Engenharia de Computação Engenharia de Produção Mecânica Engenharia de Sistemas - Modalidade
CATÁLOGO DE REQUISITOS DE TITULAÇÃO PROCESSO SELETIVO 5629/2015 1. Controle e Automação Industrial (Instrumentação) Engenharia de Computação Engenharia de Produção Mecânica Engenharia de Sistemas - Modalidade
SECRETÁRIA DE ESTADO DA EDUCAÇÃO DO PARANÁ CURSO PROFISSIONALIZANTE INFORMÁTICA
 SECRETÁRIA DE ESTADO DA EDUCAÇÃO DO PARANÁ CURSO PROFISSIONALIZANTE INFORMÁTICA Documento elaborado no encontro realizado de 10 a 12 de agosto de 2004. Curitiba, PR Perfil do Profissional Ao final de cada
SECRETÁRIA DE ESTADO DA EDUCAÇÃO DO PARANÁ CURSO PROFISSIONALIZANTE INFORMÁTICA Documento elaborado no encontro realizado de 10 a 12 de agosto de 2004. Curitiba, PR Perfil do Profissional Ao final de cada
SOLUÇÕES EM METROLOGIA SCANNER CMM 3D PARA APLICAÇÕES INDUSTRIAIS
 SOLUÇÕES EM METROLOGIA SCANNER CMM 3D PARA APLICAÇÕES INDUSTRIAIS TRUsimplicity TM MEDIÇÃO MAIS FÁCIL E RÁPIDA PORTÁTIL E SEM SUPORTE. MOVIMENTAÇÃO LIVRE AO REDOR DA PEÇA USO FACILITADO. INSTALAÇÃO EM
SOLUÇÕES EM METROLOGIA SCANNER CMM 3D PARA APLICAÇÕES INDUSTRIAIS TRUsimplicity TM MEDIÇÃO MAIS FÁCIL E RÁPIDA PORTÁTIL E SEM SUPORTE. MOVIMENTAÇÃO LIVRE AO REDOR DA PEÇA USO FACILITADO. INSTALAÇÃO EM
GUINDASTE SOBRE CAMINHÃO STC1300. Capacidade de Elevação 130t
 GUINDASTE SOBRE CAMINHÃO STC1300 Capacidade de Elevação 130t PÁGINA 01 GUINDASTE SOBRE CAMINHÃO STC1300 Comprimento da extensão total da lança principal de 60m, perfil U, placa de aço WELDOX de alta resistência.
GUINDASTE SOBRE CAMINHÃO STC1300 Capacidade de Elevação 130t PÁGINA 01 GUINDASTE SOBRE CAMINHÃO STC1300 Comprimento da extensão total da lança principal de 60m, perfil U, placa de aço WELDOX de alta resistência.
UniRitter tecnológica: integrando Engenharias para desenvolvimento de um robô humanoide
 - SEPesq UniRitter tecnológica: integrando Engenharias para desenvolvimento de um robô humanoide 1. Introdução Diego Augusto de Jesus Pacheco Giovani Geremia Segundo Vargas (2012) é perceptível que uma
- SEPesq UniRitter tecnológica: integrando Engenharias para desenvolvimento de um robô humanoide 1. Introdução Diego Augusto de Jesus Pacheco Giovani Geremia Segundo Vargas (2012) é perceptível que uma
Automação Residencial
 Automação Residencial F. A. Dias G. M. de Paula L. S. de Oliveira G.F. Vieira 1 CEFET-MG, Brasil Contexto Social e Profissional, 2009 Graduação em Engenharia Mecatrônica Motivação Questão fundamental O
Automação Residencial F. A. Dias G. M. de Paula L. S. de Oliveira G.F. Vieira 1 CEFET-MG, Brasil Contexto Social e Profissional, 2009 Graduação em Engenharia Mecatrônica Motivação Questão fundamental O
Seminário: Transmissão de Energia Elétrica a Longa Distância
 Monitoramento de Transformadores de Potência Gerenciamento de Dados para o Monitoramento e Avaliação da Condição Operativa de Transformadores Seminário: Transmissão de Energia Elétrica a Longa Distância
Monitoramento de Transformadores de Potência Gerenciamento de Dados para o Monitoramento e Avaliação da Condição Operativa de Transformadores Seminário: Transmissão de Energia Elétrica a Longa Distância
Gravação e Transmissão
 O D-Guard Center é um poderoso sistema de controle e monitoramento, integrado aos mais diversos equipamentos de segurança eletrônica. Ilimitados dispositivos podem ser controlados e monitorados simultaneamente:
O D-Guard Center é um poderoso sistema de controle e monitoramento, integrado aos mais diversos equipamentos de segurança eletrônica. Ilimitados dispositivos podem ser controlados e monitorados simultaneamente:
FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES
 FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES Prof. Ms. Carlos José Giudice dos Santos cpgcarlos@yahoo.com.br www.oficinadapesquisa.com.br Conceito de Computador Um computador digital é
FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES Prof. Ms. Carlos José Giudice dos Santos cpgcarlos@yahoo.com.br www.oficinadapesquisa.com.br Conceito de Computador Um computador digital é
Integração avançada entre sistemas de movimento e visão
 Integração avançada entre sistemas de movimento e visão Marcelo Costa Engenheiro de Vendas Telles Soares Engenheiro de Campo Agenda Benefícios da integração Tipos de integração e exemplos MOVIMENTO VISÃO
Integração avançada entre sistemas de movimento e visão Marcelo Costa Engenheiro de Vendas Telles Soares Engenheiro de Campo Agenda Benefícios da integração Tipos de integração e exemplos MOVIMENTO VISÃO
Comunicado à Imprensa
 Industry 4.0 Página 1 de 6 Beckhoff na Hanover Messe: Hall 9 Stand F06 Indústria 4.0 Fórum: Controle baseado em PC como base tecnológica para aplicações em fabricas inteligentes Com o Indústria Integrada
Industry 4.0 Página 1 de 6 Beckhoff na Hanover Messe: Hall 9 Stand F06 Indústria 4.0 Fórum: Controle baseado em PC como base tecnológica para aplicações em fabricas inteligentes Com o Indústria Integrada
INTRODUÇÃO À ROBÓTICA
 Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Material de estudo 2010 INTRODUÇÃO À ROBÓTICA André Luiz Carvalho Ottoni Introdução à Robótica Capítulo 1 - Introdução Robótica é um ramo da tecnologia que engloba mecânica, eletrônica e computação, que
Sistemas Supervisórios
 Sistemas Supervisórios Prof a. Michelle Mendes Santos michelle@cpdee.ufmg.br Sistemas Supervisórios Objetivos: Apresentação e posicionamento da utilização de sistemas supervisórios em plantas industriais;
Sistemas Supervisórios Prof a. Michelle Mendes Santos michelle@cpdee.ufmg.br Sistemas Supervisórios Objetivos: Apresentação e posicionamento da utilização de sistemas supervisórios em plantas industriais;
Robótica Industrial. Projeto de Manipuladores
 Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1 Robótica e Mecatrônica 2 Princípios
Robótica Industrial Projeto de Manipuladores Robôs são os típicos representantes da Mecatrônica. Integram aspectos de: Manipulação Sensoreamento Controle Comunicação 1 Robótica e Mecatrônica 2 Princípios
ÁREA DISCIPLINAR DE CIÊNCIA E TECNOLOGIA DA PROGRAMAÇÃO. Tem sob a sua responsabilidade as seguintes unidades curriculares:
 ÁREA DISCIPLINAR DE CIÊNCIA E TECNOLOGIA DA PROGRAMAÇÃO e Inteligência Artificial Aplicada a Jogos, com 6 Paradigmas de Programação I, com 9 Paradigmas de Programação II, com 9 Algoritmos e Estrutura de
ÁREA DISCIPLINAR DE CIÊNCIA E TECNOLOGIA DA PROGRAMAÇÃO e Inteligência Artificial Aplicada a Jogos, com 6 Paradigmas de Programação I, com 9 Paradigmas de Programação II, com 9 Algoritmos e Estrutura de
FALCON: Smart Portable Solution. A manutenção condicional nunca foi tão fácil. Brand of ACOEM
 FALCON: Smart Portable Solution A manutenção condicional nunca foi tão fácil Brand of ACOEM Com o FALCON, a ONEPROD propõe uma ferramenta de coleta, análise e balanceamento de desempenho excepcional e
FALCON: Smart Portable Solution A manutenção condicional nunca foi tão fácil Brand of ACOEM Com o FALCON, a ONEPROD propõe uma ferramenta de coleta, análise e balanceamento de desempenho excepcional e
Manual do usuário. Braço robótico para educação técnica
 para educação técnica A T E N Ç Ã O Enquanto o robô Sci-Arm é um computador leve, pode se manejar em altas velocidades e pode causar danos se ele colidir com uma pessoa. Sempre use com extrema cautela.
para educação técnica A T E N Ç Ã O Enquanto o robô Sci-Arm é um computador leve, pode se manejar em altas velocidades e pode causar danos se ele colidir com uma pessoa. Sempre use com extrema cautela.
Videojet 9550 com tecnologia Intelligent Motion. Impressora e Aplicadora de Etiquetas
 Projeto inteligente: redução de custos, erros e tempo de inatividade não planejado Impressora e Aplicadora de Etiquetas Videojet 9550 com tecnologia Intelligent Motion Uma revolução na impressão e aplicação
Projeto inteligente: redução de custos, erros e tempo de inatividade não planejado Impressora e Aplicadora de Etiquetas Videojet 9550 com tecnologia Intelligent Motion Uma revolução na impressão e aplicação
José Novais (1997), Método sequencial para automatização electro-pneumática, 3ª Edição, Fundação
, Método sequencial para automatização electro-pneumática, 3ª Edição, Fundação") AUTOMAÇÃO (M323/3073) CAPÍTULO I Introdução à Automação 2013/2014 Bibliografia José Novais (1997), Método sequencial para automatização electro-pneumática, 3ª Edição, Fundação Calouste Gulbenkian Curtis
AUTOMAÇÃO (M323/3073) CAPÍTULO I Introdução à Automação 2013/2014 Bibliografia José Novais (1997), Método sequencial para automatização electro-pneumática, 3ª Edição, Fundação Calouste Gulbenkian Curtis
A Engenharia de Automação Automação Semestre 01/2015
 A Engenharia de Automação Automação Semestre 01/2015 Engenharia de Controle e Automação Sistemas Dinâmicos Classe dos Sistemas Dinâmicos: Tempo time-driven Descritos por equações diferenciais na variável
A Engenharia de Automação Automação Semestre 01/2015 Engenharia de Controle e Automação Sistemas Dinâmicos Classe dos Sistemas Dinâmicos: Tempo time-driven Descritos por equações diferenciais na variável
Plantas Industriais. Objetivo de aprendizado. Sobre o Palestrante. AutoCAD Plant 3D - Inovação em projetos de tubulação
 Plantas Industriais Odair Maciel Dedini Indústrias de Base AutoCAD Plant 3D - Inovação em projetos de tubulação Objetivo de aprendizado Ao final desta palestra você terá condições de: Total conhecimento
Plantas Industriais Odair Maciel Dedini Indústrias de Base AutoCAD Plant 3D - Inovação em projetos de tubulação Objetivo de aprendizado Ao final desta palestra você terá condições de: Total conhecimento
Baseado na portaria n 373 de 25 de fevereiro de 2011 do Ministério do Trabalho e Emprego;
 Características Baseado na portaria n 373 de 25 de fevereiro de 2011 do Ministério do Trabalho e Emprego; Poderá ser utilizado por empresas autorizadas por convenção ou acordo coletivo a usar sistemas
Características Baseado na portaria n 373 de 25 de fevereiro de 2011 do Ministério do Trabalho e Emprego; Poderá ser utilizado por empresas autorizadas por convenção ou acordo coletivo a usar sistemas
Administração de Sistemas de Informação Gerenciais
 Administração de Sistemas de Informação Gerenciais UNIDADE III: Infraestrutura de Tecnologia da Informação Atualmente, a infraestrutura de TI é composta por cinco elementos principais: hardware, software,
Administração de Sistemas de Informação Gerenciais UNIDADE III: Infraestrutura de Tecnologia da Informação Atualmente, a infraestrutura de TI é composta por cinco elementos principais: hardware, software,
Pré-Requisitos do Curso
 Ministério da Educação Universidade Federal de Santa Maria Centro de Tecnologia Curso de Engenharia de Controle e Automação Pré-Requisitos do Curso 2º Semestre DISCIPLINAS OBRIGATÓRIAS MTM 1020 - Cálculo
Ministério da Educação Universidade Federal de Santa Maria Centro de Tecnologia Curso de Engenharia de Controle e Automação Pré-Requisitos do Curso 2º Semestre DISCIPLINAS OBRIGATÓRIAS MTM 1020 - Cálculo
Menus de configuração mais simples e auto explicativos com acesso protegido por senha de segurança;
 Características Relógio protocolador eletrônico; Menus de configuração mais simples e auto explicativos com acesso protegido por senha de segurança; Configuração via software, com opções para preenchimento
Características Relógio protocolador eletrônico; Menus de configuração mais simples e auto explicativos com acesso protegido por senha de segurança; Configuração via software, com opções para preenchimento
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras Tipos de Sistemas
Prof. Daniel Hasse Robótica Industrial Aula 02 - Robôs e seus Periféricos Tipos de Sistemas de Controle Volume de Trabalho Dinâmica e Precisão dos Movimentos Sistemas de Acionamentos Garras Tipos de Sistemas
6. CILINDROS PNEUMÁTICOS
 6. CILINDROS PNEUMÁTICOS Os cilindros, também conhecidos como atuadores lineares, são elementos pneumáticos de trabalho os quais transformam a energia proveniente do ar comprimido em energia mecânica,
6. CILINDROS PNEUMÁTICOS Os cilindros, também conhecidos como atuadores lineares, são elementos pneumáticos de trabalho os quais transformam a energia proveniente do ar comprimido em energia mecânica,
Análise e Projeto de Sistemas. Engenharia de Software. Análise e Projeto de Sistemas. Contextualização. Perspectiva Histórica. A Evolução do Software
 Análise e Projeto de Sistemas Análise e Projeto de Sistemas Contextualização ENGENHARIA DE SOFTWARE ANÁLISE E PROJETO DE SISTEMAS ENGENHARIA DA INFORMAÇÃO Perspectiva Histórica Engenharia de Software 1940:
Análise e Projeto de Sistemas Análise e Projeto de Sistemas Contextualização ENGENHARIA DE SOFTWARE ANÁLISE E PROJETO DE SISTEMAS ENGENHARIA DA INFORMAÇÃO Perspectiva Histórica Engenharia de Software 1940:
Solução para coleta de dados e análise de consumo para controlar e otimizar os custos
 Solução para coleta de dados e análise de consumo para controlar e otimizar os custos Quem é a Zaruc? Empresa que atua desde 2008 no desenvolvimento de projetos tecnológicos inovadores oferecendo soluções
Solução para coleta de dados e análise de consumo para controlar e otimizar os custos Quem é a Zaruc? Empresa que atua desde 2008 no desenvolvimento de projetos tecnológicos inovadores oferecendo soluções
Fundamentos de Automação. Hidráulica 01/06/2015. Hidráulica. Hidráulica. Hidráulica. Considerações Iniciais CURSO DE AUTOMAÇÃO INDUSTRIAL
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação CURSO
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Fundamentos de Automação CURSO
Palavras-chave: turbina eólica, gerador eólico, energia sustentável.
 Implementação do modelo de uma turbina eólica baseado no controle de torque do motor cc utilizando ambiente matlab/simulink via arduino Vítor Trannin Vinholi Moreira (UTFPR) E-mail: vitor_tvm@hotmail.com
Implementação do modelo de uma turbina eólica baseado no controle de torque do motor cc utilizando ambiente matlab/simulink via arduino Vítor Trannin Vinholi Moreira (UTFPR) E-mail: vitor_tvm@hotmail.com
Air-Fi - sistema sem fio Sinta-se confortável com a confiança e o desempenho líderes do setor.
 Air-Fi - sistema sem fio Sinta-se confortável com a confiança e o desempenho líderes do setor. Corte os fios e sinta-se confortável com a solução sem fio Air-Fi da Trane. A comunicação sem fio Air-Fi da
Air-Fi - sistema sem fio Sinta-se confortável com a confiança e o desempenho líderes do setor. Corte os fios e sinta-se confortável com a solução sem fio Air-Fi da Trane. A comunicação sem fio Air-Fi da
CATÁLOGO INSTITUCIONAL SET. 2008 CATÁLOGO INSTITUCIONAL MEGAFORT INDUSTRIAL HIDRÁULICA LTDA. CILINDROS HIDRÁULICOS
 CATÁLOGO INSTITUCIONAL SET. 2008 CATÁLOGO INSTITUCIONAL MEGAFORT INDUSTRIAL HIDRÁULICA LTDA. CILINDROS HIDRÁULICOS Em processo de certificação ISO-9001/2000 A EMPRESA Estamos apresentando a MEGAFORT INDUSTRIAL
CATÁLOGO INSTITUCIONAL SET. 2008 CATÁLOGO INSTITUCIONAL MEGAFORT INDUSTRIAL HIDRÁULICA LTDA. CILINDROS HIDRÁULICOS Em processo de certificação ISO-9001/2000 A EMPRESA Estamos apresentando a MEGAFORT INDUSTRIAL
Conceitos Básicos de Automação. Exemplo Motivador
 Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2011/02 Exemplo Motivador Para uma furação manual o operador usava os olhos, o tato e a contração de seus braços para avaliar a evolução do furo
Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2011/02 Exemplo Motivador Para uma furação manual o operador usava os olhos, o tato e a contração de seus braços para avaliar a evolução do furo
Características técnicas Baseado no ATMega da empresa AVR, fabricante de micro-controladores em plena ascensão e concorrente do PIC Pode usar ATMega
 ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
ACTOS PROFISSIONAIS GIPE. Gabinete de Inovação Pedagógica
 ACTOS PROFISSIONAIS GIPE Gabinete de Inovação Pedagógica Cooptécnica Gustave Eiffel, CRL Venda Nova, Amadora 214 996 440 910 532 379 Março, 10 MECATRÓNICA 1 GIPE - Gabinete de Inovação Pedagógica Comunicar
ACTOS PROFISSIONAIS GIPE Gabinete de Inovação Pedagógica Cooptécnica Gustave Eiffel, CRL Venda Nova, Amadora 214 996 440 910 532 379 Março, 10 MECATRÓNICA 1 GIPE - Gabinete de Inovação Pedagógica Comunicar
Robótica. Apresenta-se uma introdução aos robôs. industriais, destacando suas principais. Introdução
 Robótica Apresenta-se uma introdução aos robôs industriais, destacando suas principais características e aplicações mais importantes, bem como estatísticas e projeções sobre seu uso atual e no futuro.
Robótica Apresenta-se uma introdução aos robôs industriais, destacando suas principais características e aplicações mais importantes, bem como estatísticas e projeções sobre seu uso atual e no futuro.
TÍTULO: PROGRAMAÇÃO DE CLP PARA UMA MÁQUINA DE SECÇÃO SEGMENTOS ORGÂNICOS
 Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: PROGRAMAÇÃO DE CLP PARA UMA MÁQUINA DE SECÇÃO SEGMENTOS ORGÂNICOS CATEGORIA: CONCLUÍDO ÁREA:
Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: PROGRAMAÇÃO DE CLP PARA UMA MÁQUINA DE SECÇÃO SEGMENTOS ORGÂNICOS CATEGORIA: CONCLUÍDO ÁREA:
Introdução à Computação
 Aspectos Importantes - Desenvolvimento de Software Motivação A economia de todos países dependem do uso de software. Cada vez mais, o controle dos processos tem sido feito por software. Atualmente, os
Aspectos Importantes - Desenvolvimento de Software Motivação A economia de todos países dependem do uso de software. Cada vez mais, o controle dos processos tem sido feito por software. Atualmente, os
CENTRO UNIVERSITÁRIO ESTÁCIO RADIAL DE SÃO PAULO SÍNTESE DO PROJETO PEDAGÓGICO DE CURSO 1 MISSÃO DO CURSO
 SÍNTESE DO PROJETO PEDAGÓGICO DE CURSO 1 CURSO: ENGENHARIA ELÉTRICA MISSÃO DO CURSO O Curso de Engenharia Elétrica tem por missão a graduação de Engenheiros Eletricistas com sólida formação técnica que
SÍNTESE DO PROJETO PEDAGÓGICO DE CURSO 1 CURSO: ENGENHARIA ELÉTRICA MISSÃO DO CURSO O Curso de Engenharia Elétrica tem por missão a graduação de Engenheiros Eletricistas com sólida formação técnica que
Acionamentos estanques de giro
 WD-L Acionamento de giro por rosca sem-fim Série Leve Acionamentos estanques de giro Acionamentos estanques de giro www.imo.de Clientes OEM Acionamentos de giro IMO - perfeitas para a utilização de produtores
WD-L Acionamento de giro por rosca sem-fim Série Leve Acionamentos estanques de giro Acionamentos estanques de giro www.imo.de Clientes OEM Acionamentos de giro IMO - perfeitas para a utilização de produtores
SPS ZOOM 300. 3D Laser Scanner
 3D Laser Scanner 3D Laser Scanner O 3D laser scanner é um equipamento que faz coletas de dados espaciais precisos de objetos ou ambientes. As nuvens de pontos coletadas podem ser utilizadas para construção
3D Laser Scanner 3D Laser Scanner O 3D laser scanner é um equipamento que faz coletas de dados espaciais precisos de objetos ou ambientes. As nuvens de pontos coletadas podem ser utilizadas para construção
PRESSEINFORMATION COMUNICADO DE IMPRENSA
 PRESSEINFORMATION COMUNICADO DE EcoCWave da Dürr Ecoclean: Qualidade superior, eficiência de custos e confiabilidade de processo na lavagem à base de água Filderstadt/Germany, junho 2014 com sua EcoCWave,
PRESSEINFORMATION COMUNICADO DE EcoCWave da Dürr Ecoclean: Qualidade superior, eficiência de custos e confiabilidade de processo na lavagem à base de água Filderstadt/Germany, junho 2014 com sua EcoCWave,
15 Computador, projeto e manufatura
 A U A UL LA Computador, projeto e manufatura Um problema Depois de pronto o desenho de uma peça ou objeto, de que maneira ele é utilizado na fabricação? Parte da resposta está na Aula 2, que aborda as
A U A UL LA Computador, projeto e manufatura Um problema Depois de pronto o desenho de uma peça ou objeto, de que maneira ele é utilizado na fabricação? Parte da resposta está na Aula 2, que aborda as
Automação de Locais Distantes
 Automação de Locais Distantes Adaptação do texto Improving Automation at Remote Sites da GE Fanuc/ Water por Peter Sowmy e Márcia Campos, Gerentes de Contas da. Nova tecnologia reduz custos no tratamento
Automação de Locais Distantes Adaptação do texto Improving Automation at Remote Sites da GE Fanuc/ Water por Peter Sowmy e Márcia Campos, Gerentes de Contas da. Nova tecnologia reduz custos no tratamento
CEP - DA. Controle Estatístico do Processo
 CEP - DA Controle Estatístico do Processo Principais Funcionalidades Automatiza as rotinas do Controle Estatístico do Processo A solução para CEP da Directa Automação, composta de software e hardware,
CEP - DA Controle Estatístico do Processo Principais Funcionalidades Automatiza as rotinas do Controle Estatístico do Processo A solução para CEP da Directa Automação, composta de software e hardware,
PERGUNTAS E RESPOSTAS
 O que é um Servomotor? O servomotor é uma máquina síncrona composta por uma parte fixa (o estator) e outra móvel (o rotor). O estator é bombinado como no motor elétrico convencional, porém, apesar de utilizar
O que é um Servomotor? O servomotor é uma máquina síncrona composta por uma parte fixa (o estator) e outra móvel (o rotor). O estator é bombinado como no motor elétrico convencional, porém, apesar de utilizar
Baseado na portaria n 373 de 25 de fevereiro de 2011 do Ministério do Trabalho e Emprego;
 Características Baseado na portaria n 373 de 25 de fevereiro de 2011 do Ministério do Trabalho e Emprego; Poderá ser utilizado por empresas autorizadas por convenção ou acordo coletivo a usar sistemas
Características Baseado na portaria n 373 de 25 de fevereiro de 2011 do Ministério do Trabalho e Emprego; Poderá ser utilizado por empresas autorizadas por convenção ou acordo coletivo a usar sistemas
Soluções para Transmissão
 Soluções para Transmissão Motor Transmissão Chassis Estruturas Tração Total SOLUÇÕES PARA TRANSMISSÃO Em 1904, o fundador da Dana, Clarence Spicer, revolucionou a indústria automobilística ao inventar
Soluções para Transmissão Motor Transmissão Chassis Estruturas Tração Total SOLUÇÕES PARA TRANSMISSÃO Em 1904, o fundador da Dana, Clarence Spicer, revolucionou a indústria automobilística ao inventar
Arquitetura das Unidades de Controle Eletrônico
 Arquitetura das Unidades de Controle Eletrônico Antes que a unidade eletrônica de controle (Electronic Control Unit ECU) atue de forma precisa no motor, a ECU deve estimar com a maior de precisão possível
Arquitetura das Unidades de Controle Eletrônico Antes que a unidade eletrônica de controle (Electronic Control Unit ECU) atue de forma precisa no motor, a ECU deve estimar com a maior de precisão possível
TÍTULO: SERVIÇOS HTTP COM GEOPOSICIONAMENTO DE FROTA CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS
 TÍTULO: SERVIÇOS HTTP COM GEOPOSICIONAMENTO DE FROTA CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE DE TECNOLOGIA DE SÃO JOSÉ DOS CAMPOS AUTOR(ES):
TÍTULO: SERVIÇOS HTTP COM GEOPOSICIONAMENTO DE FROTA CATEGORIA: EM ANDAMENTO ÁREA: ENGENHARIAS E ARQUITETURA SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE DE TECNOLOGIA DE SÃO JOSÉ DOS CAMPOS AUTOR(ES):
Monitor de Temperatura MONITEMP
 ELECTRON TECNOLOGIA DIGITAL LTDA Página 1/5 INTRODUÇÃO O Monitor de Temperatura MoniTemp foi desenvolvido para supervisionar até 3 (três) canais de temperatura simultaneamente, ele é utilizado para proteger
ELECTRON TECNOLOGIA DIGITAL LTDA Página 1/5 INTRODUÇÃO O Monitor de Temperatura MoniTemp foi desenvolvido para supervisionar até 3 (três) canais de temperatura simultaneamente, ele é utilizado para proteger