MANUFATURA CELULAR E SISTEMAS FLEXÍVEIS
|
|
|
- Ian Almada Palmeira
- 6 Há anos
- Visualizações:
Transcrição

1 MANUFATURA CELULAR E SISTEMAS FLEXÍVEIS Aula 08 - SISTEMAS DE PRODUÇÃO AUTOMATIZADOS Outubro de 2016

2 SISTEMAS DE PRODUÇÃO AUTOMATIZADOS
3 O que é um sistema automatizado? É uma coleção de dispositivos que trabalham junto para realizar tarefas ou produzir um produto ou uma família dos produtos.
4 Um automóvel, para o exemplo, é um sistema automatizado. O automóvel tem um cérebro eletrônico para receber entradas dos vários sensores e para controlar as saídas que regulam a operação do motor e outras funções tais como o sistema antibloqueio do freio. Um sistema de alarme residencial é um outro sistema automatizado. Seu controle recebe a entrada dos sensores e dos interruptores situados em portas e as janelas da casa. Se este controle receber um sinal que uma porta ou uma janela estiveram abertas, soa o alarme e a polícia é acionada.
5 Os sistemas automatizados industriais podem ser uma máquina ou um grupo das máquinas chamadas de célula. Os dispositivos incluem aqueles que produzem realmente o produto e que fornecem suporte, controle, e realimentação do sistema. Os quatro tipos básicos de dispositivos em uma célula são produção, suporte, controle e retroalimentação.
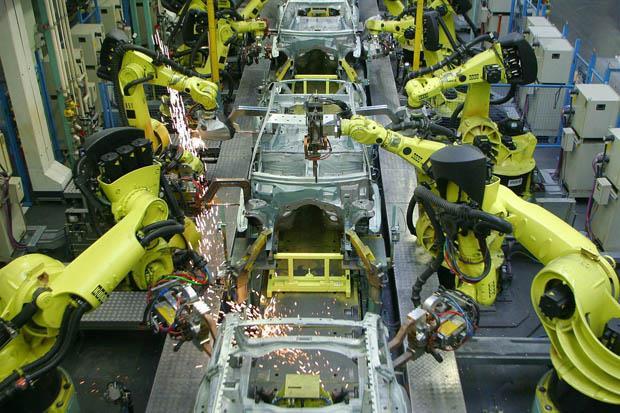
6 Dispositivos de produção Os dispositivos da produção podem incluir robôs, máquinas do controle numérico computadorizado (CNCs), dispositivos pesados de automação, e assim por diante. Os dispositivos da produção agregam valor ao produto. Executam processos de manufatura tais como usinagem, montagem, solda, pintura, e outros processos para dar forma a uma peça completa.
7 ROBÔS Os robôs são usados para muitas funções em uma célula incluindo tarefas repetitivas tais como mover e posicionar as peças entre dispositivos e tarefas da produção tais como soldagem. São rápidos e precisos. Cada um dos diversos tipos de robô - elétrico, pneumático e hidráulico - tem suas próprias vantagens. Os robôs pneumáticos são bons para tarefas simples como posicionamento de partes entre dispositivos. Os robôs pneumáticos são baratos, rápidos e precisos, mas possuem algumas limitações.
8 Não são bons para tarefas complexas e são muito limitados no número das posições que podem se mover. Robôs elétricos, que são muito versáteis, são usados posicionando, soldando e em muitas outras tarefas. Os robôs elétricos são rápidos e precisos, mas são muito mais caros do que robôs pneumáticos. Os robôs hidráulicos são bons para a pintura e aplicações pesadas. São rápidos e podem mover-se suavemente, tornando-os eficazes para aplicações de pintura. São também bons para as aplicações perigosas em que uma faísca elétrica poderia causar uma explosão.
9
10 Integração do robô Os robôs são relativamente fáceis de programar e integrar em células. Muitos robôs são movidos simplesmente para cada posição e uma chave é usada ensinar cada posição. Outros robôs são programados usando linguagens especializadas para robótica. Os robôs têm entradas digitais (on/off) e saídas digitais (I/0). Estas entradas e saídas são conectadas facilmente aos dispositivos do controle, tais como PLCs, computadores ou outros dispositivos.
11 A maioria de células robotizadas esperam uma entrada para dizer ao robô o que fazer. Ele então executa uma tarefa e emite uma saída a um controlador da célula para dizer ao dispositivo de controle que terminou a tarefa e está esperando outras instruções. Esta troca das entradas e das saídas entre dispositivos é chamada handshaking (aperto de mão).

12
13 Computer Numerical Control Equipment (CNC) As máquinas do CNC são as máquinas cujos movimentos e as ações são controladas por um computador. Podem ser processos de manufatura, tornos e fresas; máquinas para perfurar o metal; máquinas de descarga elétrica (EDMs), as quais usam um fio ou um eletrodo e faíscas elétricas para cortar metais; máquinas de fabricar molas; e máquinas a laser ou plasma corte de metais.
14 As máquinas de CNC são programadas com códigos e números simples. Os códigos dizem à máquina que tipo de função a executar, e os números dizem-no quão distante mover-se.
15 Dispositivos Pesados Automatizados para Produção Um dispositivo pesado automatizado é projetado geralmente para uma finalidade específica e em consequência, tem pouca flexibilidade. Os dispositivos pesados automatizados podem ser projetados para serem usados como dispositivos de produção ou como dispositivos de suporte ou apoio.
16 EQUIPAMENTOS DE SUPORTE OU APOIO Equipamentos de apoio podem incluir sistemas de armazenamento automatizado/fornecimento automatizados (AS/RS), transportadores, dispositivos pesados automatizados e assim por diante. Equipamentos de suporte ou apoio são usados para o armazenamento e o fornecimento de material bruto, produtos emprocessamento e produtos terminados. Computadores controlam estes dispositivos de armazenamento automatizados.
17 O uso do computador assegura também que o produto mais velho no armazenam seja usado primeiramente. Um típico sistema AS/RS tem três eixos de movimento: um eixo-x que se move ao longo do assoalho, um eixo-y para movimento sobe/desce, e um eixo-z para movimentar para dentro e para fora habilitando-o a pôr o produto na área de armazenamento.
18 Transportadores Os transportadores são usados para mover o produto entre células e processos e classificar o produto. Isto significa que usando sensores ou leitores simples do tipo código de barra, um transportador pode ser usado para enviar o produto ao lugar certo, detectando que tipo de produto está presente.

19

20
21 Paleteiras Paleteiras são usadas para pegar caixas de uma célula e embalá-las em um pallet que contem muitas caixas. A Paleteira também envolve as caixas com plástico para prendê-las juntas e para protegê-las para o transporte. Uma paleteira pode ser considerado um dispositivo pesado automatizado porque é geralmente usada para um trabalho específico.

22

23
24 DISPOSITIVOS DE CONTROLE
25 Programmable Logic Controllers (PLCs) Um PLC é o tipo o mais comum de controlador de célula; coordena todos os dispositivos restantes. O PLC é como o cérebro da célula. É um computador projetado para ser facilmente utilizado por eletricistas e técnicos. É programado em uma linguagem chamada lógica ladder, que lembra os diagramas que eletricistas e técnicos compreendem. Um PLC é também útil para integrar e controlar outros dispositivos.
26 DISPOSITIVOS DE REALIMENTAÇÃO
27 Sensores Os sensores estão disponíveis para quase todo tipo de aplicação. Os sensores são como os olhos, orelhas e o tato de uma célula. Fornecem realimentação ao dispositivo de controle para lhe informar o que está acontecendo na célula. Os sensores podem ser do tipo digitais simples (on/off) ou do tipo analógico mais complexo, que fornece uma saída que seja proporcional à entrada.
28 Um exemplo é um sensor usado medir a temperatura. Um sensor analógico solta uma corrente diferente para cada temperatura e fornece mais informação do que um do tipo digital, mas é mais caro.
29 Os sensores digitais simples são os mais comuns. Incluem fotosensores, sensores indutivos para detecção de objetos de metal, sensores capacitivos usados para detecção de qualquer objeto, sensores ultra-sônicos para detectar objetos ou a distância ao objeto usando o som e interruptores de alcance simples. Sensores que encostam no produto são chamados sensores de contato. Sensores que não tocam no produto, como foto-sensores, são chamados no-contact, ou de proximidade. Os sensores eletrônicos (no-contact) são sensores de maior confiabilidade e velocidade de resposta do que os mecânicos (sensores de contato).

30
31 Sistemas de Visão Os sistemas de visão são usados para inspecionar a qualidade de um produto. A inspeção pode ser usada para verificar e assegurar que todos os componentes estão presentes em uma placa de circuito impressa, para medir o tamanho do produto ou para ler etiquetas e assegurar que estão completas e precisas. Os sistemas da visão estão tendo seu uso e importância aumentados na indústria. São muito mais precisos do que seres humanos para executar tarefas repetitivas da inspeção.
32 Operação do Sistema de Visão Os sistemas de visão baseiam-se no contraste para tomar decisões. Uma imagem feita com uma câmera é analisada pelo computador. A iluminação do objeto é muito importante porque a maioria de sistemas da visão podem perceber somente através do contraste. A placa de processamento de imagens verifica cada pixel para determinar seu nível de brilho, chamado de nível de cinza.
33 Código de Barra O código de barra é usado extensivamente no negócio e na indústria; virtualmente cada produto em quase cada loja é codificado. Muitos esquemas de código de barra estão em uso. Um é o código de produto universal (UPC), usado tipicamente para produtos nas lojas. Um código de barra pode conter números do produto, informação de data e ou especificações.
34 OPORTUNIDADES NA AUTOMAÇÃO A mudança rápida na manufatura criou uma riqueza de oportunidades de novas carreiras. Técnicos e engenheiros capacitados em trabalhar com estas novas tecnologias são muito procurados pelo mercado. A automação criou uma demanda para projetistas que sabem utilizar sistemas CAD/CAM para projetar e construir sistemas de automação.
35 Há demanda também para aqueles que compreendem como programar e integrar os dispositivos. Há uma necessidade para engenheiros de campo e pessoal de manutenção, e oportunidades tremendas estão disponíveis para os engenheiros que compreendem essas novas tecnologias e como aplica-las.
36 Sugestões para aula prática!
SISTEMA FLEXÍVEL DE TREINAMENTO EM LINHAS DE PRODUÇÃO AUTOMATIZADAS (8 ESTAÇÕES)
") SISTEMA FLEXÍVEL DE TREINAMENTO EM LINHAS DE PRODUÇÃO AUTOMATIZADAS (8 ESTAÇÕES) MODELO: EE0034 DESCRIÇÃO: Este dispositivo é constituído por múltiplas estações de trabalho que podem ser utilizadas de
SISTEMA FLEXÍVEL DE TREINAMENTO EM LINHAS DE PRODUÇÃO AUTOMATIZADAS (8 ESTAÇÕES) MODELO: EE0034 DESCRIÇÃO: Este dispositivo é constituído por múltiplas estações de trabalho que podem ser utilizadas de
Conceitos Básicos de Automação. Prof. Jeferson L. Curzel 2019/01
 Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2019/01 Exemplo Motivador Furação manual: operador usava os olhos, o tato e a contração dos músculos avaliava a evolução do furo na madeira, decidindo
Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2019/01 Exemplo Motivador Furação manual: operador usava os olhos, o tato e a contração dos músculos avaliava a evolução do furo na madeira, decidindo
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição do Instituto de Robôs
Profª Danielle Casillo
 UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Aula 05 Introdução ao CLP Profª Danielle Casillo CONTROLADOR LÓGICO PROGRAMÁVEL -CLP 2 CONTROLADOR LÓGICO PROGRAMÁVEL
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Aula 05 Introdução ao CLP Profª Danielle Casillo CONTROLADOR LÓGICO PROGRAMÁVEL -CLP 2 CONTROLADOR LÓGICO PROGRAMÁVEL
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação
 Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Robótica Industrial: Fundamentos, Tecnologias, Programação e Simulação Winderson Eugenio dos Santos José Hamilton Chaves Gorgulho Jr Editora Erica Saraiva Robôs Industriais Capítulo 1 Karel Capek (1921)
Manufatura por FMS e CIM
 Campus Divinópolis Contexto Social e Profissional da Engenharia Mecatrônica. Grupo 06 Manufatura por FMS e CIM Felipe Wagner Guilherme Henrique Gabriel Aparecido Renan 1º PERIODO ENGENHARIA MECATRÔNICA
Campus Divinópolis Contexto Social e Profissional da Engenharia Mecatrônica. Grupo 06 Manufatura por FMS e CIM Felipe Wagner Guilherme Henrique Gabriel Aparecido Renan 1º PERIODO ENGENHARIA MECATRÔNICA
- Solução de problemas complexos de aquisição e processamento dos dados, viabilizando tecnicamente a medição;
 Capítulo 10 AUTOMAÇÃO DO CONTROLE DIMENSIONAL 10.1 INTRODUÇÃO A utilização do computador na metrologia dimensional e/ou controle de qualidade geométrica não é uma questão de racionalização de mão-de-obra
Capítulo 10 AUTOMAÇÃO DO CONTROLE DIMENSIONAL 10.1 INTRODUÇÃO A utilização do computador na metrologia dimensional e/ou controle de qualidade geométrica não é uma questão de racionalização de mão-de-obra
Parte I Introdução. professorferlin.blogspot.com. professorferlin.blogspot.com. Sociedade Paranaense de Ensino e Informática
 www.spei.br Sociedade Paranaense de Ensino e Informática Parte I Introdução 2 1 Uma máquina pode fazer o trabalho de cinquenta pessoas comuns. Máquina alguma pode fazer o trabalho de um homem incomum.
www.spei.br Sociedade Paranaense de Ensino e Informática Parte I Introdução 2 1 Uma máquina pode fazer o trabalho de cinquenta pessoas comuns. Máquina alguma pode fazer o trabalho de um homem incomum.
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA
 1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
1- INTRODUÇÃO AOS ROBÔS INDUSTRIAIS MODELAGEM GEOMÉTRICA 1.1 Introdução Um robô industrial é uma máquina com características significativas de versatilidade e flexibilidade. De acordo com uma definição
Prof. Daniel Hasse. Robótica Industrial
 Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Prof. Daniel Hasse Robótica Industrial Robótica Industrial Aula 5 - Componentes III Sensores Controlador / Eletrônica de Controle Software / Programação IHM Eletrônica de Potência Classificação dos Sensores
Circuitos Elétricos 40 Módulo 1 Eletrônica Geral 80 Módulo 1. Hidráulica e Pneumática II 40 Módulo 1. Tecnologia dos Materiais 40 Módulo 1
 Curso Técnico Concomitante em Mecatrônica CÂMPUS LAGES MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 320h Unidade Curricular C/H Semestral Pré-Requisito Instalações e Comandos Elétricos 60 Não
Curso Técnico Concomitante em Mecatrônica CÂMPUS LAGES MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 320h Unidade Curricular C/H Semestral Pré-Requisito Instalações e Comandos Elétricos 60 Não
 Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Conceitos de instrumentação ITIA4
 MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO CAMPUS DE PRESIDENTE EPITÁCIO Conceitos de instrumentação ITIA4 Instrumentação, controle e automação dos processos
MINISTÉRIO DA EDUCAÇÃO INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO CAMPUS DE PRESIDENTE EPITÁCIO Conceitos de instrumentação ITIA4 Instrumentação, controle e automação dos processos
Metrologia 30 Não há Eletricidade 60 Não há Tecnologia dos Materiais I 30 Não há
 Curso Técnico Subsequente em Eletromecânica Técnico em Eletromecânica CÂMPUS LAGES MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 285h Introdução à Eletromecânica 15 Não há Qualidade, meio ambiente,
Curso Técnico Subsequente em Eletromecânica Técnico em Eletromecânica CÂMPUS LAGES MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 285h Introdução à Eletromecânica 15 Não há Qualidade, meio ambiente,
CONCEITOS E DEFINIÇÕES. Automação?
 CONCEITOS E DEFINIÇÕES Automação? CONCEITOS E DEFINIÇÕES Ponto de vista mercadológico O termo automação foi introduzido nos anos 60 como apelo de marketing aos novos produtos então lançados. CONCEITOS
CONCEITOS E DEFINIÇÕES Automação? CONCEITOS E DEFINIÇÕES Ponto de vista mercadológico O termo automação foi introduzido nos anos 60 como apelo de marketing aos novos produtos então lançados. CONCEITOS
ROBÓTICA INDUSTRIAL MECATRÔNICA
 A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
A diversidade de tipos de robôs que existem impedem que haja uma definição de robô que seja universalmente aceita. No entanto há um conjunto comum de componentes que essa diversidade de robôs partilha,
 Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção) Controle Manual - Torno Automático
Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso MATRIZ CURRICULAR
 em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso MATRIZ CURRICULAR") Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso CÂMPUS Araranguá MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 0h Eletricidade
Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso CÂMPUS Araranguá MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 0h Eletricidade
Automação da Produção
 Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação Automação da Produção É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
CLP ESTRUTURA E FUNCIONAMENTO ROGER NABEYAMA MICHELS
 CLP ESTRUTURA E FUNCIONAMENTO ROGER NABEYAMA MICHELS DISPOSITIVO CAPAZ DE Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou reparos em falhas que venham a ocorrer durante
CLP ESTRUTURA E FUNCIONAMENTO ROGER NABEYAMA MICHELS DISPOSITIVO CAPAZ DE Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou reparos em falhas que venham a ocorrer durante
Robótica. Prof. Reinaldo Bianchi Centro Universitário da FEI 2016
 Robótica Prof. Reinaldo Bianchi Centro Universitário da FEI 2016 2 a Aula Parte B Detalhando os objetivos Sensores Definições Classificação: Mecânicos. Elétricos. Magnéticos. Térmicos. Outros. Diversos
Robótica Prof. Reinaldo Bianchi Centro Universitário da FEI 2016 2 a Aula Parte B Detalhando os objetivos Sensores Definições Classificação: Mecânicos. Elétricos. Magnéticos. Térmicos. Outros. Diversos
CNC: Computer Numeric Control
 Questões iniciais UNIFEI EME006 - Automação Industrial CNC: Computer Numeric Control Aula 8 Prof. José Hamilton Chaves Gorgulho Júnior Como se desenvolveu a tecnologia CNC? Quais as aplicações do CNC?
Questões iniciais UNIFEI EME006 - Automação Industrial CNC: Computer Numeric Control Aula 8 Prof. José Hamilton Chaves Gorgulho Júnior Como se desenvolveu a tecnologia CNC? Quais as aplicações do CNC?
Efetuadores e Atuadores
 elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
elcabral@usp.br 1 PMR2560 Robótica Efetuadores e Atuadores Eduardo L. L. Cabral elcabral@usp.br elcabral@usp.br 2 Objetivos Efetuadores: Tipos principais; Exemplos. Atuadores: Requisitos; Tipos principais:
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota
 DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
DEFINIÇÃO DE ROBÔ A palavra robô deriva-se da palavra eslava robota, que significa trabalhador forçado. Foi usada pela primeira vez em 1921 pelo dramaturgo Karel Capek. Robotic Industries Association -
TÍTULO: ENVERNIZADORA DE PORTA CANETAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA: ENGENHARIAS INSTITUIÇÃO: FACULDADE DE JAGUARIÚNA
 Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: ENVERNIZADORA DE PORTA CANETAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA:
Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: ENVERNIZADORA DE PORTA CANETAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA:
4444W-02 Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA MECÂNICA 4444W-02 Sistemas Robotizados Aula 2 Introdução à Robótica Industrial Prof. Felipe Kühne Bibliografia:
ADM 250 capítulo 8 - Slack, Chambers e Johnston
 ADM 250 capítulo 8 - Slack, Chambers e Johnston 1 Perguntas que se esperam respondidas ao final do capítulo 8 Que é tecnologia de processo? ecnologia de Processo Quais são as tecnologias de processamento
ADM 250 capítulo 8 - Slack, Chambers e Johnston 1 Perguntas que se esperam respondidas ao final do capítulo 8 Que é tecnologia de processo? ecnologia de Processo Quais são as tecnologias de processamento
Manipulação Robótica. Aula 2
 Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Manipulação Robótica Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) Robôs Manipuladores 2.1. Estrutura de Robôs Manipuladores 2.2. Classificação de Robôs Manipuladores 2.3. Sistema
Redes Industriais. Curso: Téc. Automação Professor: Regis Isael
 Redes Industriais Curso: Téc. Automação Professor: Regis Isael Histórico Década de 20 Henry Ford criou a primeira linha de produção para a fabricação de automóveis. Década de 60 Criação dos transistores.
Redes Industriais Curso: Téc. Automação Professor: Regis Isael Histórico Década de 20 Henry Ford criou a primeira linha de produção para a fabricação de automóveis. Década de 60 Criação dos transistores.
Introdução à Robótica Industrial. Aula 2
 Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Introdução à Robótica Industrial Aula 2 Programa 1) Introdução 1.1. Tipos de Robôs 1.2. Aplicações 2) O Robô Manipulador 2.1. Estrutura de Robôs Manipuladores 2.2. Sensores 2.3. Atuadores 2.4. Efetuadores
Estudo sobre sistemas flexíveis de manufatura
 Estudo sobre sistemas flexíveis de manufatura Autor: Alessandro Ferreira - Engenharia de Controle e Automação Professor Orientador: Ms. Luiz Paulo Cadioli Faculdade Politécnica de Matão Resumo Este trabalho
Estudo sobre sistemas flexíveis de manufatura Autor: Alessandro Ferreira - Engenharia de Controle e Automação Professor Orientador: Ms. Luiz Paulo Cadioli Faculdade Politécnica de Matão Resumo Este trabalho
TÍTULO: EMBALADORA DE TABULEIRO DE DAMAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA: ENGENHARIAS
 Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: EMBALADORA DE TABULEIRO DE DAMAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA:
Anais do Conic-Semesp. Volume 1, 2013 - Faculdade Anhanguera de Campinas - Unidade 3. ISSN 2357-8904 TÍTULO: EMBALADORA DE TABULEIRO DE DAMAS CATEGORIA: CONCLUÍDO ÁREA: ENGENHARIAS E TECNOLOGIAS SUBÁREA:
Linha AW. Series. Comando Siemens. Comando Fanuc. Processo de Usinagem de Rodas de Alumínio utilizando Máquinas e Robô Hyundai F500 L500/600AW
 Linha AW Series Processo de Usinagem de Rodas de Alumínio utilizando Máquinas e Robô Hyundai F500 L500/600AW Comando Fanuc Comando Siemens Descarga através de esteira L500/600AW Carga através de esteira
Linha AW Series Processo de Usinagem de Rodas de Alumínio utilizando Máquinas e Robô Hyundai F500 L500/600AW Comando Fanuc Comando Siemens Descarga através de esteira L500/600AW Carga através de esteira
Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus)
") Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
Aspectos Gerais do Produto: Descritivo Combo 4 (Conjunto de 4 kits Modelix Marte Plus) A Modelix Robotics oferece neste kit a maneira mais fácil e econômica para que a escola implante robótica. Ele permite
Sistemas Robotizados
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Aplicações da Robótica Industrial Prof. Felipe Kühne
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO RIO GRANDE DO SUL FACULDADE DE ENGENHARIA ENGENHARIA DE CONTROLE E AUTOMAÇÃO 44646-04 Sistemas Robotizados Aula 2 Aplicações da Robótica Industrial Prof. Felipe Kühne
MECATRÔNICA MANIPULADORES ROBÓTICOS
 MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
MANIPULADORES ROBÓTICOS O grande escritor americano de ficção científica Isaac Asimov estabeleceu quatro leis muito simples para a robótica: A robótica abrange tecnologia de mecânica, eletrônica e computação.
Matriz de Especificação de Prova da Habilitação Técnica de Nível Médio. Habilitação Técnica de Nível Médio: Técnico em Mecatrônica
 : Técnico em Mecatrônica Descrição do Perfil Profissional: Auxiliam os engenheiros em projetos, programas de controle, instalação e manutenção de sistemas de Analisam especificações para aquisição de componentes
: Técnico em Mecatrônica Descrição do Perfil Profissional: Auxiliam os engenheiros em projetos, programas de controle, instalação e manutenção de sistemas de Analisam especificações para aquisição de componentes
TECNOLOGIA DE PROCESSO
 TECNOLOGIA DE PROCESSO Danillo Tourinho Sancho da Silva, MSc INTRODUÇÃO Tecnologia de processo são máquinas, equipamentos e dispositivos que ajudam a produção a transformar materiais, informações e consumidores
TECNOLOGIA DE PROCESSO Danillo Tourinho Sancho da Silva, MSc INTRODUÇÃO Tecnologia de processo são máquinas, equipamentos e dispositivos que ajudam a produção a transformar materiais, informações e consumidores
ü Na década de 1920 os dispositivos mecânicos foram substituídos pelos relés; ü O uso da lógica de relés dificultava modificações do processo;
 O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
Automação da Produção
 Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Robótica Industrial Automação da Produção Automação É uma tecnologia que faz uso de sistemas mecânicos, elétricos, eletrônicos e de computação (emprego de robôs) para efetuar o controle de processos produtivos.
Automação. 4 de fevereiro de Prof. Ramon Moreira Lemos
 Automação 4 de fevereiro de 2016 O que é automação? Engenharia de automação é o estudo das técnicas que visam otimizar um processo de negócio, aumentando sua produtividade, promovendo a valorização da
Automação 4 de fevereiro de 2016 O que é automação? Engenharia de automação é o estudo das técnicas que visam otimizar um processo de negócio, aumentando sua produtividade, promovendo a valorização da
Elementos de. sinais. Elementos de. Trabalho. Elementos de. Comando. Elementos de. Controle
 Cadeia de comando Sensores, botoeiras, fim de curso de came ou rolete, barreiras pneumáticas ou fotoelétricas, pedais Motores, cilindros, atuadores Elementos de sinais Elementos de Trabalho Válvulas, contatores
Cadeia de comando Sensores, botoeiras, fim de curso de came ou rolete, barreiras pneumáticas ou fotoelétricas, pedais Motores, cilindros, atuadores Elementos de sinais Elementos de Trabalho Válvulas, contatores
SOLUÇÕES EM METROLOGIA OS 3D SCANNERS ÓPTICOS CMM COM MONTAGEM FEITA POR ROBÔS PARA INSPEÇÃO AUTOMATIZADA
 SOLUÇÕES EM METROLOGIA OS 3D SCANNERS ÓPTICOS CMM COM MONTAGEM FEITA POR ROBÔS PARA INSPEÇÃO AUTOMATIZADA Os scanners 3D ópticos CMM MetraSCAN-R TM fazem parte do catálogo MetraSCAN 3D TM da Creaform e
SOLUÇÕES EM METROLOGIA OS 3D SCANNERS ÓPTICOS CMM COM MONTAGEM FEITA POR ROBÔS PARA INSPEÇÃO AUTOMATIZADA Os scanners 3D ópticos CMM MetraSCAN-R TM fazem parte do catálogo MetraSCAN 3D TM da Creaform e
Arduino. Aula 3 motores
 Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Projeto de Automação I
 Projeto de Automação I 14/06/2010 Paulo Oshiro 1 SISTEMAS AUTOMATIZADOS Evolução da Eletrônica; Substituição da tomada de decisão; Controles e auto-correções através de sensoriamento e ações similares
Projeto de Automação I 14/06/2010 Paulo Oshiro 1 SISTEMAS AUTOMATIZADOS Evolução da Eletrônica; Substituição da tomada de decisão; Controles e auto-correções através de sensoriamento e ações similares
Válvula direcional vias posições acionamento e retorno normalmente.
 1) Os elementos constituintes de um sistema pneumático ou hidráulico são divididos em três grupos conhecidos por (1) Sistemas de Comando, (2) Comandos de Potência e (3) Atuadores. Classifique de acordo
1) Os elementos constituintes de um sistema pneumático ou hidráulico são divididos em três grupos conhecidos por (1) Sistemas de Comando, (2) Comandos de Potência e (3) Atuadores. Classifique de acordo
PMR3507 Fábrica digital
 LSA Laboratório de Sistemas de Automação www.pmrlsa.poli.usp.br PMR3507 Fábrica digital Cyber Physical System Escola Politécnica da Universidade de São Paulo Departamento de Engenharia Mecatrônica e de
LSA Laboratório de Sistemas de Automação www.pmrlsa.poli.usp.br PMR3507 Fábrica digital Cyber Physical System Escola Politécnica da Universidade de São Paulo Departamento de Engenharia Mecatrônica e de
Controle II. Márcio J. Lacerda. 2 o Semestre Departamento de Engenharia Elétrica Universidade Federal de São João del-rei
 Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
Controle II Márcio J. Lacerda Departamento de Engenharia Elétrica Universidade Federal de São João del-rei 2 o Semestre 2016 M. J. Lacerda Aula 1 1/24 Integral P 1 (100 pontos) - 22 de Setembro. P 2 (100
AULA 1 - INTRODUÇÃO. Prof. Marcio Kimpara
 COMANDOS INDUSTRIAIS AULA 1 - INTRODUÇÃO Prof. Marcio Kimpara UFMS - Universidade Federal de Mato Grosso do Sul FAENG Faculdade de Engenharias, Arquitetura e Urbanismo e Geografia Prof. Marcio Kimpara
COMANDOS INDUSTRIAIS AULA 1 - INTRODUÇÃO Prof. Marcio Kimpara UFMS - Universidade Federal de Mato Grosso do Sul FAENG Faculdade de Engenharias, Arquitetura e Urbanismo e Geografia Prof. Marcio Kimpara
Disciplina Eletropneumática e Hidráulica. Notas de Aula. Sensores. Prof. MSc. Fernando Fortunato Prof. MSc. José Junio Lopes
 Disciplina Eletropneumática e Hidráulica Notas de Aula Sensores Prof. MSc. Fernando Fortunato Prof. MSc. José Junio Lopes Algumas Aplicações dos Sensores Exemplos de aplicações: contagem de peças; medição
Disciplina Eletropneumática e Hidráulica Notas de Aula Sensores Prof. MSc. Fernando Fortunato Prof. MSc. José Junio Lopes Algumas Aplicações dos Sensores Exemplos de aplicações: contagem de peças; medição
CAPÍTULO Robôs industriais. 2. Classificação dos robôs. industriais. 3. Sensores. 4. Acionamento e controle de robôs
 CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
CAPÍTULO 8 1. Robôs industriais 2. Classificação dos robôs industriais 3. Sensores 4. Acionamento e controle de robôs 5. Precisão e capacidade de repetição 6. Garras e ferramentas 1. Robôs industriais
EDUCAÇÃO PROFISSIONAL COM MOBILIDADE E FLEXIBILIDADE PARA SUA INDÚSTRIA CRESCER.
 EDUCAÇÃO PROFISSIONAL COM MOBILIDADE E FLEXIBILIDADE PARA SUA INDÚSTRIA CRESCER. CAPACITE SUAS EQUIPES SEM TIRÁ-LAS DO LOCAL DE TRABALHO O Senai Onde Você Está é um programa do Senai no Paraná que leva
EDUCAÇÃO PROFISSIONAL COM MOBILIDADE E FLEXIBILIDADE PARA SUA INDÚSTRIA CRESCER. CAPACITE SUAS EQUIPES SEM TIRÁ-LAS DO LOCAL DE TRABALHO O Senai Onde Você Está é um programa do Senai no Paraná que leva
AULA. Processamento de Dados
 UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação Curso de Bacharelado em Ciência da Computação Disciplina: INF64 (Introdução à Ciência da Computação) Prof: Anilton Joaquim da Silva / Ezequiel
UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação Curso de Bacharelado em Ciência da Computação Disciplina: INF64 (Introdução à Ciência da Computação) Prof: Anilton Joaquim da Silva / Ezequiel
Processo e Aplicações
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA Processo e Aplicações Professor: Anderson Luís Garcia Correia Unidade Curricular de Processos de Soldagem 04 de maio de 2017 Atualmente,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA Processo e Aplicações Professor: Anderson Luís Garcia Correia Unidade Curricular de Processos de Soldagem 04 de maio de 2017 Atualmente,
Informática Básica e Aplicativos de Escritório
 Informática Básica e Aplicativos de Escritório Computadores: Ferramentas para a Era da Informação Professor: Charles Leite Forjando uma Sociedade Baseada em Computadores Bases tradicionais da economia:
Informática Básica e Aplicativos de Escritório Computadores: Ferramentas para a Era da Informação Professor: Charles Leite Forjando uma Sociedade Baseada em Computadores Bases tradicionais da economia:
Unidade 1: Tecnologias da Informação e Comunicação Conceitos Introdutórios. Tecnologias da Informação e Comunicação
 Agrupamento Campo Aberto - Beiriz Tecnologias da Informação e Comunicação Unidade 1: Tecnologias da Informação e Comunicação Áreas de Aplicação das TIC n n n Computação l l Informática Burótica Comunicação
Agrupamento Campo Aberto - Beiriz Tecnologias da Informação e Comunicação Unidade 1: Tecnologias da Informação e Comunicação Áreas de Aplicação das TIC n n n Computação l l Informática Burótica Comunicação
Fundamentos. É um conjunto de operações que são aplicadas sobre determinadas informações para transformá-las em outras, ou gerar novas informações.
 UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação - Prof. Anilton e Ronaldo Disciplinas: APC e ICC Fundamentos Diariamente, executamos diversas operações, isto é, processamos informações para
UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação - Prof. Anilton e Ronaldo Disciplinas: APC e ICC Fundamentos Diariamente, executamos diversas operações, isto é, processamos informações para
Microcontroladores e Robótica
 Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Manufatura auxiliada por computador
 S07 Computer Aided Manufacturing (CAM) Manufatura auxiliada por computador Tecnologias de manufatura Projeto Controle Manuseio Gerenciamento Projeto auxiliado por computador Manufatura auxiliada por computador
S07 Computer Aided Manufacturing (CAM) Manufatura auxiliada por computador Tecnologias de manufatura Projeto Controle Manuseio Gerenciamento Projeto auxiliado por computador Manufatura auxiliada por computador
Aula 01. Sistemas Analógicos e Digitais
 Aula 01 Sistemas Analógicos e Digitais (pág. 1 a 7, 45 a 46 ) 1 Prof. Dr. Aparecido Nicolett PUC-SP INTRODUÇÃO O termo digital tornou-se parte de nosso vocabulário diário, devido ao modo intenso pelo qual
Aula 01 Sistemas Analógicos e Digitais (pág. 1 a 7, 45 a 46 ) 1 Prof. Dr. Aparecido Nicolett PUC-SP INTRODUÇÃO O termo digital tornou-se parte de nosso vocabulário diário, devido ao modo intenso pelo qual
Soluções de Visão Artificial para a Indústria Eletrónica
 Soluções de Visão Artificial para a Indústria Eletrónica www.infaimon.com INTRODUÇÃO A visão artificial pode resolver qualquer tipo de aplicação de controle de qualidade em linhas de produção, garantindo
Soluções de Visão Artificial para a Indústria Eletrónica www.infaimon.com INTRODUÇÃO A visão artificial pode resolver qualquer tipo de aplicação de controle de qualidade em linhas de produção, garantindo
CONTROLE AUTOMATIZADO DA IRRIGAÇÃO UTILIZANDO UM CONTROLADOR LÓGICO PROGRAMÁVEL ASSOCIADO A UM INVERSOR DE FREQUÊNCIA
 UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE CIENCIAS AGRÁRIAS DEPARTAMENTO DE ENGENHARIA AGRÍCOLA LEMA LABORATÓRIO DE ELETRÔNICA E CONTROLE AUTOMATIZADO DA IRRIGAÇÃO UTILIZANDO UM CONTROLADOR LÓGICO PROGRAMÁVEL
UNIVERSIDADE FEDERAL DO CEARÁ CENTRO DE CIENCIAS AGRÁRIAS DEPARTAMENTO DE ENGENHARIA AGRÍCOLA LEMA LABORATÓRIO DE ELETRÔNICA E CONTROLE AUTOMATIZADO DA IRRIGAÇÃO UTILIZANDO UM CONTROLADOR LÓGICO PROGRAMÁVEL
COMPONENTES DE UM SISTEMA ROBÓTICO
 COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
COMPONENTES DE UM SISTEMA ROBÓTICO Introdução Um robô é um equipamento programável, multifuncional designado a mover partes, materiais, ferramentas utilizando movimentos programados. (Robotics Institute
Módulo I Carga horária total: 400h
 Curso Técnico Integrado em MECÂNICA CÂMPUS ITAJAÍ MATRIZ CURRICULAR Módulo I Carga horária total: 400h Português e História da Literatura Brasileira I 2 Educação Física I 2 Artes I 2 Matemática I 4 Física
Curso Técnico Integrado em MECÂNICA CÂMPUS ITAJAÍ MATRIZ CURRICULAR Módulo I Carga horária total: 400h Português e História da Literatura Brasileira I 2 Educação Física I 2 Artes I 2 Matemática I 4 Física
TECNÓLOGO EM ANÁLISE E DESENVOLVIMENTO DE SISTEMAS PROGRAMAÇÃO DE COMPUTADORES I
 TECNÓLOGO EM ANÁLISE E DESENVOLVIMENTO DE SISTEMAS PROGRAMAÇÃO DE COMPUTADORES I Aula 02: Organização e Arquitetura de Computadores / Lógica Digital (Parte I) O conteúdo deste documento tem por objetivo
TECNÓLOGO EM ANÁLISE E DESENVOLVIMENTO DE SISTEMAS PROGRAMAÇÃO DE COMPUTADORES I Aula 02: Organização e Arquitetura de Computadores / Lógica Digital (Parte I) O conteúdo deste documento tem por objetivo
MATERIAL 1 (FIC Programação Básica CLP Básico)
") MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA FIC PROGRAMAÇÃO DE CLP BÁSICO MATERIAL 1 (FIC Programação
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA FIC PROGRAMAÇÃO DE CLP BÁSICO MATERIAL 1 (FIC Programação
Pelo Site: aracatuba.sp.senai.br ou na própria escola
 ESCOLA SENAI "DUQUE DE CAXIAS" ARAÇATUBA - SP PROGRAMAÇÃO DE CURSOS - 1º SEMESTRE DE 2019 - V. 01 INSCRIÇÕES: A PARTIR DE 12 DE NOVEMBRO DE 2018 - ÀS 9:00h 1º PASSO: No site, na aba "A Escola" selecione:
ESCOLA SENAI "DUQUE DE CAXIAS" ARAÇATUBA - SP PROGRAMAÇÃO DE CURSOS - 1º SEMESTRE DE 2019 - V. 01 INSCRIÇÕES: A PARTIR DE 12 DE NOVEMBRO DE 2018 - ÀS 9:00h 1º PASSO: No site, na aba "A Escola" selecione:
Fundamentos de Automação. Controlador 01/06/2015. Controladores. Controladores. Controladores. Considerações Iniciais CURSO DE AUTOMAÇÃO INDUSTRIAL
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Considerações Iniciais Fundamentos
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Considerações Iniciais Fundamentos
Para se planejar o processo de fabricação da peça é necessário conhecer em detalhes as suas características, como:
 Usinagem de peças a partir de blanks em tornos automáticos CNC Este artigo tem por objetivo apresentar as maneiras de se produzir peças torneadas em série e de forma automática através da utilização de
Usinagem de peças a partir de blanks em tornos automáticos CNC Este artigo tem por objetivo apresentar as maneiras de se produzir peças torneadas em série e de forma automática através da utilização de
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Automação Industrial
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Automação Industrial Prof. Heitor Medeiros Florencio Aulas anteriores O que é automação industrial? Quais
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Automação Industrial Prof. Heitor Medeiros Florencio Aulas anteriores O que é automação industrial? Quais
CONTROLADOR ATUADOR PROCESSO SENSO
 TRANSDUTORES Dispositivos que converte uma forma de energia ou quantidade física, em outra. Os Transdutores podem ainda ser dividido em Sensores, que monitoram um sistema, e atuadores que impõem uma ação
TRANSDUTORES Dispositivos que converte uma forma de energia ou quantidade física, em outra. Os Transdutores podem ainda ser dividido em Sensores, que monitoram um sistema, e atuadores que impõem uma ação
Processo e Aplicações
 INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA Processo e Aplicações Professor: Anderson Luís Garcia Correia Unidade Curricular de Processos de Soldagem 27 de outubro de 2016 Atualmente,
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SANTA CATARINA Processo e Aplicações Professor: Anderson Luís Garcia Correia Unidade Curricular de Processos de Soldagem 27 de outubro de 2016 Atualmente,
Plano de Trabalho Docente Ensino Técnico
 Plano de Trabalho Docente 015 Ensino Técnico Etec Etec: Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e Processos Industriais Habilitação Profissional: Técnico em Mecatrônica
Plano de Trabalho Docente 015 Ensino Técnico Etec Etec: Paulino Botelho Código: 091 Município: São Carlos Eixo Tecnológico: Controle e Processos Industriais Habilitação Profissional: Técnico em Mecatrônica
AULA 9 ATUADORES ELÉTRICOS
 AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
AULA 9 ATUADORES ELÉTRICOS Prof. Fabricia Neres Tipos de Acionamento Os acionadores são dispositivos responsáveis pelo movimento nos atuadores. Podem ser classificados em: Acionamento Elétrico; Acionamento
Mecânica de Precisão
 MANUFATURAA Mecânica de Precisão As instalações das oficinas foram projetadas obedecendo um layout adequado à produção dos equipamentos, permitindo que o fluxo de materiais em fabricação aconteça de forma
MANUFATURAA Mecânica de Precisão As instalações das oficinas foram projetadas obedecendo um layout adequado à produção dos equipamentos, permitindo que o fluxo de materiais em fabricação aconteça de forma
Prof. André Rabelo LÓGICA DIGITAL INTRODUÇÃO
 Prof. André Rabelo LÓGICA DIGITAL INTRODUÇÃO INTRODUÇÃO Um sistema pode ser definido como sendo um conjunto de elementos que são interligados de alguma maneira para compor um todo e assim realizar funcionalidade
Prof. André Rabelo LÓGICA DIGITAL INTRODUÇÃO INTRODUÇÃO Um sistema pode ser definido como sendo um conjunto de elementos que são interligados de alguma maneira para compor um todo e assim realizar funcionalidade
Descrição das competências aprendidas na área de trabalho
 Formação profissional Técnico em Mecatrônica Departamento Estação de Padrões de competências (Padrão de desempenho) Tutor 1.1 Processos de fabricação manual de componentes. 1.2 Produção de peças com ajuda
Formação profissional Técnico em Mecatrônica Departamento Estação de Padrões de competências (Padrão de desempenho) Tutor 1.1 Processos de fabricação manual de componentes. 1.2 Produção de peças com ajuda
GRADE DE DISCIPLINAS DO CURSO Módulo 1: competências básicas
 Mecatrônica GRADE DE DISCIPLINAS DO CURSO Módulo 1: competências básicas Conteúdos Horas Presencial Matemática / Física 80 80 Desenho Técnico 40 40 Eletricidade 40 40 Circuitos Elétricos 40 40 Redes /
Mecatrônica GRADE DE DISCIPLINAS DO CURSO Módulo 1: competências básicas Conteúdos Horas Presencial Matemática / Física 80 80 Desenho Técnico 40 40 Eletricidade 40 40 Circuitos Elétricos 40 40 Redes /
Conceitos Básicos INTRODUÇÃO À COMPUTAÇÃO E SUAS APLICAÇÕES
 FACULDADE DOS GUARARAPES INTRODUÇÃO À COMPUTAÇÃO E SUAS APLICAÇÕES Conceitos Básicos Prof. Rômulo César romulodandrade@gmail.com romulocesar@faculdadeguararapes.edu.br www.romulocesar.com.br INTRODUÇÃO
FACULDADE DOS GUARARAPES INTRODUÇÃO À COMPUTAÇÃO E SUAS APLICAÇÕES Conceitos Básicos Prof. Rômulo César romulodandrade@gmail.com romulocesar@faculdadeguararapes.edu.br www.romulocesar.com.br INTRODUÇÃO
Introdução Robôs Industriais
 ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
ROBÔS Introdução Os benefícios teóricos de utilizar robôs em uma indústria são numerosos e vai desde o aumento da produtividade, a melhoria e a consistência na qualidade final do produto (a qual também
Faculdade SENAI Rio. Infraestrutura Graduação Tecnológica em Automação Industrial
 Faculdade SENAI Rio Infraestrutura Graduação Tecnológica em Automação Industrial Laboratório de Eletrônica Possui kits didáticos de Eletrônica Analógica e Digital e diversos equipamentos tais como: osciloscópios
Faculdade SENAI Rio Infraestrutura Graduação Tecnológica em Automação Industrial Laboratório de Eletrônica Possui kits didáticos de Eletrônica Analógica e Digital e diversos equipamentos tais como: osciloscópios
SENSORES. AEMS Rev. Conexão Eletrônica Três Lagoas, MS - Volume 14 Número 1 Ano 2017.
 SENSORES Amanda Vessoni Graduanda em Engenharia de Produção, Faculdades Integradas de Três Lagoas FITL/AEMS Rodrigo Villamayor de Souza Graduando em Engenharia de Produção, Faculdades Integradas de Três
SENSORES Amanda Vessoni Graduanda em Engenharia de Produção, Faculdades Integradas de Três Lagoas FITL/AEMS Rodrigo Villamayor de Souza Graduando em Engenharia de Produção, Faculdades Integradas de Três
MATRIZ CURRICULAR ENGENHARIA DE CONTROLE E AUTOMAÇÃO - IFES - CAMPUS SERRA
 Página: 1 MATRIZ CURRICULAR ENGENHARIA DE CONTROLE E AUTOMAÇÃO - IFES - CAMPUS SERRA Carga Horária Total = 3645 h (Teórica = 2640 h, Laboratório = 1005 h). Núcleos: Básico, Profissionalizante, Específico.
Página: 1 MATRIZ CURRICULAR ENGENHARIA DE CONTROLE E AUTOMAÇÃO - IFES - CAMPUS SERRA Carga Horária Total = 3645 h (Teórica = 2640 h, Laboratório = 1005 h). Núcleos: Básico, Profissionalizante, Específico.
ELETRONICA DIGITAL. Aula 01 Apresentação da disciplina; Representação Digital x Analógica. Prof. Franklin Alves 1
 ELETRONICA DIGITAL Aula 01 Apresentação da disciplina; Representação Digital x Analógica. Prof. Franklin Alves 1 Objetivo Entender os conceitos fundamentais de lógica digital. Estudo de Sistemas Digitais
ELETRONICA DIGITAL Aula 01 Apresentação da disciplina; Representação Digital x Analógica. Prof. Franklin Alves 1 Objetivo Entender os conceitos fundamentais de lógica digital. Estudo de Sistemas Digitais
TA Tecnologia de Automação Para Farmacêuticos 24.outubro.2017
 TA Tecnologia de Automação Para Farmacêuticos 24.outubro.2017 PLCs Programmable Logic Controllers PLC Programmable Logic Controller Hardware ao qual os sensores de campo são conectados, assim como outros
TA Tecnologia de Automação Para Farmacêuticos 24.outubro.2017 PLCs Programmable Logic Controllers PLC Programmable Logic Controller Hardware ao qual os sensores de campo são conectados, assim como outros
Grupo de Projeto, Fabricação e Automação Industrial. Heraldo Amorim
 Grupo de Projeto, Fabricação e Automação Industrial Heraldo Amorim Eng. Mecânica Eng. de Controle e Automação Design Laboratórios Laboratórios Laboratório de Metrologia Dimensional Lamed Laboratório de
Grupo de Projeto, Fabricação e Automação Industrial Heraldo Amorim Eng. Mecânica Eng. de Controle e Automação Design Laboratórios Laboratórios Laboratório de Metrologia Dimensional Lamed Laboratório de
Benefícios de um CLP:
 Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
AUTOMAÇÃO DA PRODUÇÃO. Prof. Dr. Roger Nabeyama Michels
 AUTOMAÇÃO DA PRODUÇÃO Prof. Dr. Roger Nabeyama Michels INTRODUÇÃO, CONCEITO E HISTÓRIA DA AUTOMAÇÃO INDUSTRIAL Prof. Dr. Roger Nabeyama Michels Todos o desenvolvimento na área da Automação Industrial tem
AUTOMAÇÃO DA PRODUÇÃO Prof. Dr. Roger Nabeyama Michels INTRODUÇÃO, CONCEITO E HISTÓRIA DA AUTOMAÇÃO INDUSTRIAL Prof. Dr. Roger Nabeyama Michels Todos o desenvolvimento na área da Automação Industrial tem
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Introdução à Automação Industrial
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Introdução à Automação Industrial Prof. Heitor Medeiros Florencio Introdução O que é automação? O que podemos
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Introdução à Automação Industrial Prof. Heitor Medeiros Florencio Introdução O que é automação? O que podemos
CONTROLE E AUTOMAÇÃO DE SISTEMAS Aula 01
 Os controladores lógicos programáveis, ou mais comumente, os CLPs, são computadores digitais empregados para a automação de tarefas ou processos exclusivos, com diferentes aplicações. Eles manipulam máquinas
Os controladores lógicos programáveis, ou mais comumente, os CLPs, são computadores digitais empregados para a automação de tarefas ou processos exclusivos, com diferentes aplicações. Eles manipulam máquinas
Pelo Site: aracatuba.sp.senai.br ou na própria escola
 ESCOLA SENAI "DUQUE DE CAXIAS" ARAÇATUBA - SP PROGRAMAÇÃO DE CURSOS - 2º SEMESTRE DE 2018 - V. 02 INSCRIÇÕES: A PARTIR DE 04 DE JUNHO DE 2018 - ÀS 9:00h 1º PASSO: No site, na aba "A Escola" selecione:
ESCOLA SENAI "DUQUE DE CAXIAS" ARAÇATUBA - SP PROGRAMAÇÃO DE CURSOS - 2º SEMESTRE DE 2018 - V. 02 INSCRIÇÕES: A PARTIR DE 04 DE JUNHO DE 2018 - ÀS 9:00h 1º PASSO: No site, na aba "A Escola" selecione:
DR-ISOL4XM3-CS. CNC Control Board Manual
 DR-ISOL4XM3-CS CNC Control Board Manual Por favor, leia com atenção este manual antes de usar utilizar o produto. Por favor, mantenha este manual para futuras referências. Notas de segurança: A placa de
DR-ISOL4XM3-CS CNC Control Board Manual Por favor, leia com atenção este manual antes de usar utilizar o produto. Por favor, mantenha este manual para futuras referências. Notas de segurança: A placa de
Sistemas para Automação e
 Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
Sistemas para Automação e Robótica História da Robótica O precursor do termo robô (Groover, 1988) foi Karel Capek, novelista e escritor de uma peca teatral da Tchecoslovaquia, que usou pela primeira vez,
UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação Curso de Eng. Química Disciplina: FACOM39017 (Alg. Prog. de Computadores) Fundamentos
 Fundamentos") UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação Curso de Eng. Química Disciplina: FACOM39017 (Alg. Prog. de Computadores) Fundamentos Diariamente, executamos diversas operações, isto é, processamos
UNIVERSIDADE FEDERAL DE UBERLÂNDIA Faculdade de Computação Curso de Eng. Química Disciplina: FACOM39017 (Alg. Prog. de Computadores) Fundamentos Diariamente, executamos diversas operações, isto é, processamos
Introdução ao Controladores Lógicos Programáveis - CLP
 Introdução ao Controladores Lógicos Programáveis - CLP 1.1 Histórico dos CLPs O controlador lógico programável, conhecido comumente pela sigla CLP, é um dispositivo eletrônico dotado de um microprocessador
Introdução ao Controladores Lógicos Programáveis - CLP 1.1 Histórico dos CLPs O controlador lógico programável, conhecido comumente pela sigla CLP, é um dispositivo eletrônico dotado de um microprocessador