3.4 Movimento ao longo de uma curva no espaço (parte segunda)
|
|
|
- Maria de Begonha Rijo Carrilho
- 8 Há anos
- Visualizações:
Transcrição
1 Movimento ao longo de uma curva no espaço (parte segunda) Mais exemplos sobre curvas no espaço. No parágrafo anterior discutimos os elementos que entram na descrição de uma trajetória de uma partícula no espaço tridimensional (no 3-espaço). Vamos, primeiramente, considerar um problema sobre os conceitos introduzidos até aqui (curvatura, raio de curvatura, tangente etc.). Depois retomamos os programas usados na seção 3.4 (primeira parte) para conhecer alguns aperfeiçoamentos na sua formulação. Não precisamos, na realidade, refazer os programas, é suficiente familiarizar-nos com técnicas mais curtas e mais elegantes que MuPAD oferece para representar graficamente pontos, grupos de curvas, setas etc. 1. Velocidade, tangente, curvatura etc. Uma partícula move-se ao longo de uma trajetória C cujas equações paramétricas são x = 3 cos(2t), y = 3 sin(2t), z = 8t-4; t é o tempo. a. Determinar um vetor-tangente (velocidade) à C. b. Qual o módulo deste vetor? c. Mostrar que t = - 3/5 sin(2t) i + 3/5 cos(2t) j + 4/5 k é um vetor-tangente-unitário à C. d. Mostrar que a curvatura é 3/25 e. Faça uma representação gráfica da trajetória C.
 para conhecer alguns aperfeiçoamentos na sua formulação.")
2 Solução: x:=t->3*cos(2*t)://problema 1 y:=t->3*sin(2*t): z:=t->(8*t-4): pos:=matrix([[x(t),y(t),z(t)]])://vetor-posição v:=matrix([[x'(t),y'(t),z'(t)]])://vetor-velocidade ac:=matrix([[x''(t),y''(t),z''(t)]])://vetor-aceleração absolv:=sqrt(v[1]^2+v[2]^2+v[3]^2): vt:=v/absolv: vt_abs:=sqrt(vt[1]^2+vt[2]^2+vt[3]^2): k:=diff(vt,t)/absolv://eq. ( ) ou (14) k_abs:=sqrt(k[1]^2+k[2]^2+k[3]^2): simplify(v); simplify(absolv); simplify(vt);//vetor-tangente-unitário simplify(vt_abs); simplify(k); simplify(k_abs);
![absolv:=sqrt(v[1]^2+v[2]^2+v[3]^2): vt:=v/absolv: vt_abs:=sqrt(vt[1]^2+vt[2]^2+vt[3]^2): k:=diff(vt,t)/absolv://eq. (3.4.](/docs-images/49/6241307/images/page_2.jpg "1-6) ou (14) k_abs:=sqrt(k[1]^2+k[2]^2+k[3]^2): simplify(v); simplify(absolv); simplify(vt);//vetor-tangente-unitário")
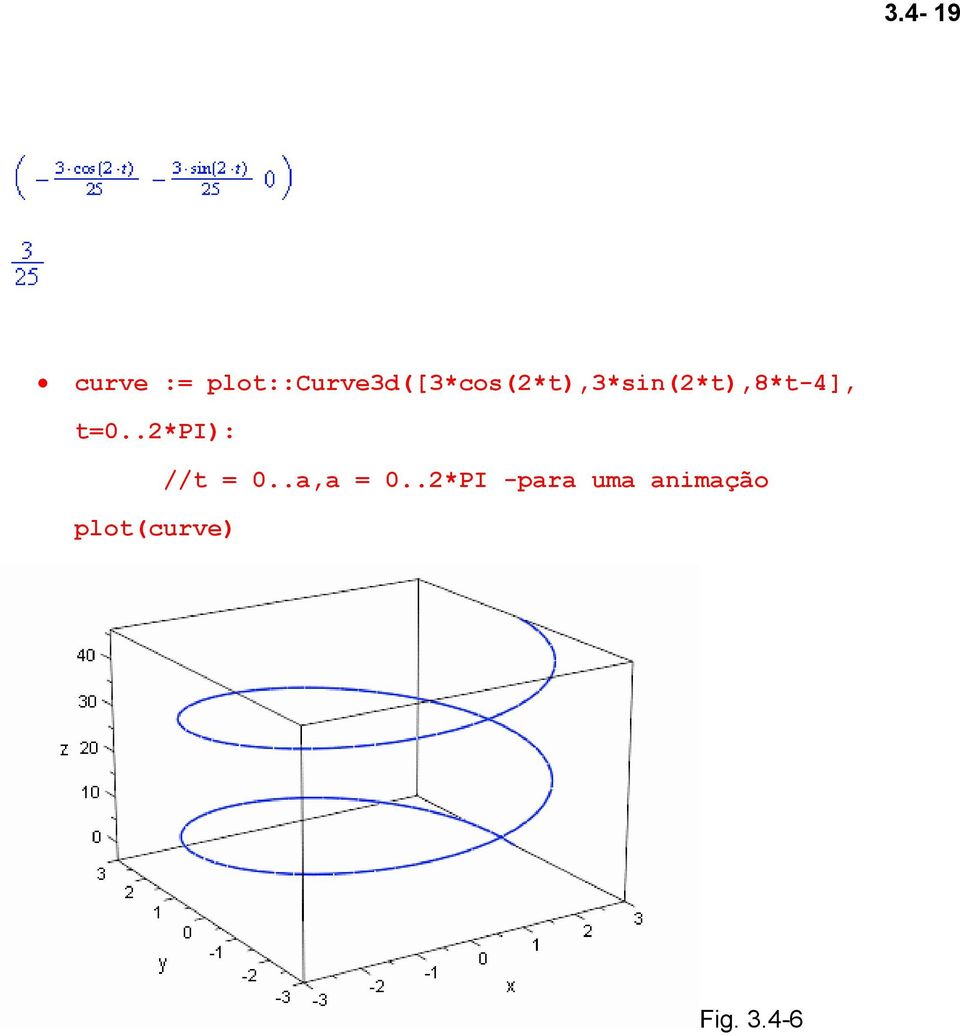
3 curve := plot::curve3d([3*cos(2*t),3*sin(2*t),8*t-4], t=0..2*pi): //t = 0..a,a = 0..2*PI -para uma animação plot(curve) Fig
4 Faça um gráfico de três elipses com a mesma origem. (Sugestão: empregar x = i cos(t), y = i/2 sen(t) para i = 1,2,3) Solução: reset():// 3 elipses for i from 1 to 3 do x:=t->i*cos(t): y:=t->i/2*sin(t): curve(i):=plot::curve2d([x(t),y(t)],t=0..2*pi): end_for; Fig plot(curve(i)$ i=1..3, Scaling=Constrained)
:=plot::curve2d([x(t),y(t)],t=0..2*pi): end_for; Fig. 3.")
5 Coloque 6 pontos (x(i), y(i)), i = sobre a elipse {9 cos(t), 5 sin(t)} (a elipse serve de pano de fundo). Solução: reset(): x:=t->9*cos(t): y:=t->5*sin(t): curve:=plot::curve2d([x(t),y(t)],color=rgb::red,t=0..2*pi): for i from 1 to 6 do p(i):=plot::point2d([x(i),y(i)]): end_for; plot(curve,p(i) $ i = 1..6, Scaling=Constrained) Fig
,y(t)],color=rgb::red,t=0.")
6 Refazer o problema 3 para valores de i da lista "valores = [PI/3,PI/4,PI/5]" Solução: reset(): valores:=[pi/3,pi/4,pi/5]: x:=t->9*cos(t): y:=t->5*sin(t): pos:=matrix([[x(t),y(t)]]): curve:=plot::curve2d(pos,color=rgb::red,t=0..2*pi): p:=plot::point2d(subs([pos[1],pos[2]],t=valores[i]), Color=RGB::Green,PointSize=2*unit::mm) $ i=1..3: plot(curve,p,scaling=constrained) Fig
![valores:=[pi/3,pi/4,pi/5]: x:=t->9*cos(t): y:=t->5*sin(t): pos:=matrix([[x(t),y(t)]]):](/docs-images/49/6241307/images/page_6.jpg "curve:=plot::curve2d(pos,color=rgb::red,t=0.")
7 Coloque nos 3 pontos do gráfico anterior os vetores-tangenciais unitários. Solução: reset(): valores:=[pi/3,pi/4,pi/5]: x:=t->9*cos(t): y:=t->5*sin(t): pos:=matrix([[x(t),y(t)]]): v:=matrix([[x'(t),y'(t)]]): vabs:=sqrt(v[1]^2+v[2]^2): vt:=v/vabs: curve:=plot::curve2d(pos,color=rgb::red,t=0..2*pi): x1:=pos[1]: y1:=pos[2]: x2:=x1+2*vt[1]: y2:=y1+2*vt[2]: p:=plot::point2d(subs([x1,y1],t=valores[i]), Color=RGB::Green,PointSize=2*unit::mm) $ i=1..3: vtg:=plot::arrow2d(subs(([x1,y1],[x2,y2]),t=valores[i]), Color=RGB::Blue) $ i=1..3: plot(curve,p,vtg,scaling=constrained)
![vabs:=sqrt(v[1]^2+v[2]^2): vt:=v/vabs: curve:=plot::curve2d(pos,color=rgb::red,t=0.](/docs-images/49/6241307/images/page_7.jpg ".2*pi): x1:=pos[1]: y1:=pos[2]: x2:=x1+2*vt[1]: y2:=y1+2*vt[2]: p:=plot::point2d(subs([x1,y1],t=valores[i]),")
8 Fig Ampliar o gráfico anterior com os vetores da curvatura Solução: reset()://t-k-plot valores:=[pi/2,pi/4,pi/8]: scale:=20: x:=t->9*cos(t): y:=t->5*sin(t): pos:=matrix([[x(t),y(t)]]): v:=matrix([[x'(t),y'(t)]]): vabs:=sqrt(v[1]^2+v[2]^2): vt:=v/vabs: k:=diff(vt,t)/vabs: curve:=plot::curve2d(pos,color=rgb::red,t=0..2*pi):
![valores:=[pi/2,pi/4,pi/8]: scale:=20: x:=t->9*cos(t): y:=t->5*sin(t):](/docs-images/49/6241307/images/page_8.jpg "pos:=matrix([[x(t),y(t)]]): v:=matrix([[x'(t),y'(t)]]): vabs:=sqrt(v[1]^2+v[2]^2):")
9 x1:=pos[1]: y1:=pos[2]: x2:=x1+0.5*v[1]: y2:=y1+0.5*v[2]: x3:=x1+scale*k[1]:y3:=y1+scale*k[2]: p:=plot::point2d(subs([x1,y1],t=valores[i]), Color=RGB::Green,PointSize=2*unit::mm) $ i=1..3: vtg:=plot::arrow2d(subs(([x1,y1],[x2,y2]),t=valores[i]), Color=RGB::Blue) $ i=1..3: vk:=plot::arrow2d(subs(([x1,y1],[x3,y3]),t=valores[i]), Color=RGB::Black) $ i=1..3: plot(curve,p,vtg,vk,scaling=constrained) Fig
,t=valores[i]), Color=RGB::Blue) $ i=1.")
10 Para fazer um gráfico de uma função f a (x), para k diferentes valores do parâmetro a, utilizamos a função plotfunc2d (subs(f_a, a=valores[i] $ i = 1..k, XRange = -1..5,YRange = -1..1) Estabelecer o gráfico de f a (x) = ln x/ x a, x positivo e valores de a = [0,0.5,1,2]. Soluçaõ: assume(x, Type::Positive): f_a:=ln(x)/x^a: valores_de_a:=[0,0.5,1,2]: plotfunc2d(subs(f_a,a=valores_de_a[i]) $ i=1..4, XRange=-1..5, YRange=-1..1); Fig
![plotfunc2d (subs(f_a, a=valores[i] $ i = 1..k, XRange = -1..5,YRange = -1.](/docs-images/49/6241307/images/page_10.jpg ".1) Estabelecer o gráfico de f a (x) = ln x/ x a, x positivo e valores de a = [0,0.5,1,2].")
11 Superfície e círculo osculador no espaço tridimensional Uma função de duas variáveis pode ser representada, graficamente, por uma superfície no espaço de três dimensôes. Para funções de três ou mais variáveis, essa representação não é possível. Existe, porem, a possibilidade de representar funções de três variáveis por meio de superfícies de nível. É o método usado, por exemplo, para estabelecer o potencial gravitacional constante ao redor da Terra. Na meteorologia conhecemos as superfícies de temperatura constante ou pressão constante. Você se lembra, certamente, que o tema das superfícies já foi matéria de estudo em algumas seções passadas, veja p.ex. as seções 1.1 ou 2.3. Na seção 2.3 usamos a função plot::surface e na seção foi introduzida a função plotfunc3d. É aconselhável reler essas seções de tempos passados, certo? Vamos agora considerar mais alguns exemplos. Exemplo 1: a. Faça um gráfico da superfície z = 4 -x 2-2y 2 para x = e y = b. Determine a equação do plano tangente à superfície z = 4 -x 2-2y 2 no ponto (2, -1). (Veja "Com Lapis e papel". O plano tangente será z t = 10-4(x-y)). Solução: Parte a: reset(): superficie:=4-x^2-2*y^2: plotfunc3d(superficie,x=-4..4,y=-3..3, CameraDirection=[10,-5,35])// experimentar!

12 Fig Parte b: superficie:=4-x^2-2*y^2: plano:=10-4*(x-y): plotfunc3d(superficie,plano,x=-4..4,y=-3..3, CameraDirection=[10,-5,35])
:")
13 Fig No parágrafo 2.3.3, mencionei as diferentes ferramentas (Tools) que MuPAD oferece para inspecionar os gráficos em três dimensões. Com Tools/Query pode-se ler, aproximadamente, as coordenadas do ponto de contato entre plano e superfície; encontra-se, por exemplo: a ~ 1,96, b ~ -1,02, f(2,-1) ~ -1,93. Exemplo 2 a. Representar o Círculo Osculador no espaço tridimensional utilizando o programa do círculo osculador no plano-xy (Programa 4). Você encontra as informações sobre as pequenas mudanças necessárias em "Com lapis e papel". b. Usar como curva x = cos (t), y = 2 sen (t), z = t, e como "instante" de contato t 1 = PI/4. Também incluir no gráfico o vetor de curvatura para t = t

14 reset()://círculo-osculador no espaço t1:=pi/4: x:=t->cos(t): y:=t->2*sin(t): z:=t->t: scale:=5: curva:=plot::curve3d([x(t),y(t),z(t)],t=0..pi): pos:=matrix([[x(t),y(t),z(t)]])://vetor-posição v:=matrix([[x'(t),y'(t),z'(t)]])://vetor-velocidade absolv:=sqrt(v[1]^2+v[2]^2+v[3]^2): vt:=v/absolv://vetor-tangente-unitário k:=diff(vt,t)/absolv://vetor de curvatura raio:=1/sqrt(k[1]^2+k[2]^2+k[3]^2): centro:=pos+k*raio^2: vn:=k*raio://vetor-normal-unitário t:=t1: x1:=pos[1]: y1:=pos[2]: z1:=pos[3]: x2:=x1+scale*k[1]: y2:=y1+scale*k[2]: z2:=z1+scale*k[3]: circ:=centro+raio*(cos(t2)*vt+sin(t2)*vn): x3:=circ[1]: y3:=circ[2]:
![vt:=v/absolv://vetor-tangente-unitário k:=diff(vt,t)/absolv://vetor de curvatura raio:=1/sqrt(k[1]^2+k[2]^2+k[3]^2): centro:=pos+k*raio^2:](/docs-images/49/6241307/images/page_14.jpg "vn:=k*raio://vetor-normal-unitário t:=t1: x1:=pos[1]: y1:=pos[2]: z1:=pos[3]: x2:=x1+scale*k[1]: y2:=y1+scale*k[2]: z2:=z1+scale*k[3]:")
15 z3:=circ[3]: x4:=centro[1]: y4:=centro[2]: z4:=centro[3]: circulo:=plot::curve3d([x3,y3,z3],t2=0..2*pi,color=rgb::bla ck): pc:=plot::point3d(x4,y4,z4,color=rgb::black,pointsize=2*uni t::mm): p:=plot::point3d(x1,y1,z1,color=rgb::green,pointsize=2*unit ::mm): kc:=plot::arrow3d([x1,y1,z1],[x2,y2,z2],color=rgb::red): plot(curva,pc,p,kc,circulo,scaling=constrained) Fig
:")
16 3.4.6 Com lápis e papel Derivadas Parciais e plano tangente. A equação da reta tangente à curva y = f(x) no ponto (a, f(a)) é -ver parágrafo y = f(a) + f'(a)(x-a) (1) No caso de uma função z = f(x,y) temos um plano tangente no ponto (a,b) do domínio de f(x,y) no plano-xy. (a, b, f(a,b)) é o ponto de contato entre plano tangente e superfície (sabemos que a função z = f(x,y) pode ser representada por uma superfície). A equação y = b representa um plano que corta a superfície, dando origem a uma curva C. A derivada parcial f x em (a, b) pode ser interpretada como a inclinação da reta tangente à curva C, ou seja, como sendo tg α. Por exemplo, seja z = 4 - x 2-2y 2 uma função definida num domínio D do plano-xy e seja (2, -1) um ponto de D. Para y = -1 (ou +1), temos z = 2 - x 2, de sorte que a derivada ao longo da curva C (fazer um gráfico!) é f x = -2x; fazendo x = 2, vemos que f x (2, -1) é igual a -4. Define-se de modo análogo a derivada parcial f y (a,b). Em nosso caso, temos, para x = 2, z = -2y 2 e f y = -4y; fazendo y = -1, resulta f y (2, -1) = 4. No caso de funções explícitas z = f(x,y), se calcula essas derivadas de modo usual, pois trata-se sempre de derivar uma função de uma variável, sendo a outra variável tratada como uma constante. Para a equação do plano tangente à superfície z = f(x,y) no ponto (a, b) esperamos uma equação do tipo da Eq. (1), mais ampliada por um termo que toma em conta a inclinação na direção-y. Efetivamente, temos z t = f(a,b) + f x (a,b)(x-a) + f y (a,b)(y-b) (2) No caso da função z = 4 - x 2-2y 2 no ponto (2, -1), confira a figura mais acima, z t = -2 + (-4)(x-2) + (+4)(y+1) = 10-4(x-y)

17 Círculo osculador no espaço. Para representar o círculo osculador no espaço tridimensional à uma curva C, precisamos de dois vetores unitários que definem o plano no qual se encontra o círculo osculador. Podemos escolher os vetores unitários ortogonais t e n para tal fim. Seja A o ponto de contato entre o círculo osculador e a curva C para t = a (ou t = t 1 ). Qual é a equação deste círculo? Os vetores t e n (no "instante" t = a e traslocados no centro m do círculo), são dois vetores unitários, assim como i e j. Fig Um ponto X qualquer do círculo tem, respeito do centro C, as coordenadas (r cos(t), r sen(t)), ou seja, respeito da origem O, x(t) = m + CX = m + r (cos(t) t(a) + sen(t) n(a)) (3) É esta a equação do círculo osculador que foi usado no último programa, onde circ:=centro+raio*(cos(t2)*vt+sin(t2)*vn): é o vetor x(t). O parâmetro t2 foi introduzido para fazer o gráfico do círculo por meio da instrução circulo:=plot::curve3d([x3,y3,z3],t2=0..2*pi,color=rgb::black): x3:=circ[1,1] é a primeira coordenada do vetor x(t).
, são dois vetores unitários, assim como i e j. Fig. 3.")
18 Parametrização de planos e retas no 3-espaço No parágrafo anterior utilizamos os vetores unitários t e n para definir um plano no 3- espaço. Equação (3) é uma equação vetorial paramétrica de um círculo de raio r nesse plano. O vetor m foi o vetor posição do centro do círculo. Considere agora um plano E contendo dois vetores não paralelos u e v e um ponto P o com o vetor posição r o. Podemos chegar a qualquer ponto do plano partindo de P o e caminhando paralelamente a u e v, somando múltiplos deles a r o, ver esboço Fig Assim temos a seguinte equação vetorial paramétrica do plano E E: r(s,t) = r o + s u + t v (4) Cada escolha dos parâmetros (s, t) marca um ponto P no plano E. Se r o = x o i + y o j + z o k e u = a 1 i + a 2 j + a 3 k e v = b 1 i + b 2 j + b 3 k, então as equações paramétricas do plano E podem ser escritas na forma: x = x o + s a 1 + t b 1, y = y o + s a 2 + t b 2, z = z o + s a 3 + t b 3 (5)

19 Observe que a parametrização do plano expressa as coordenadas x, y e z como funções lineares dos parámetros s e t. Exemplo 1 (plano): Escreva uma equação paramétrica para o plano pelo ponto (2,-1,3) e contendo os vetores u = 2i + 3j - k e v = i - 4j + 5k. Solução: A equação paramétrica é r(s,t) = 2i - j + 3k + s(2i + 3j - k) + t(i - 4j + 5k), ou seja: r(s,t) = (2+2s+t)i + (-1+3s-4t)j + (3-s+5t)k. Em forma de coordenadas: x = 2 + 2s + t, y = s - 4t, z = 3 - s + 5t Um plano paralelo ao plano-yz tem uma equação da forma x = k, onde k é uma constante. Na seguinte figura estão representadas os planos paralelos aos planos de coordenadas juntos com o gráfico da função z = 4-0.5(x 2 + y 2 ) O ponto P o está sempre sobre um eixo numa distância 2; os vetores u e v são os vetores unitários i, j, k. Por exemplo: O plano paralelo ao plano-xz tem P o = (0,2,0), u = (1,0,0), v = (0,0,1). As equações paramétricas são x = s, y = 2, z = t. Para os plots dos 3 planos utilizamos a função plot::surface, e para a função z = 4-0.5(x 2 + y 2 ) utilizamos plot::function3d. reset()://3 planos superficie:=-0.5*x^2-0.5*y^2+4: f:=plot::function3d(superficie,x=-4..4,y=-4..4): E1:=plot::Surface([2,s,t], s=-4..4, t=-12..4,color=rgb::green): E2:=plot::Surface([s,2,t], s=-4..4, t=-12..4,color=rgb::blue): E3:=plot::Surface([s,t,2], s=-4..4, t=-4..4,color=rgb::yellow): plot(f,e1,e2,e3)

20 Fig Exemplo 2 (reta): Agora considere uma reta g na direção do vetor v passando pelo ponto (x o,y o,z o ) com vetor posição r o. Começamos em r o e nos movemos pela reta somando diferentes múltiplos de v. Desta forma todo ponto da reta pode ser escrito como g: r(t) = r o + t v (6) Se v = ai + bj + ck, obtemos as seguintes equações paramétricas da reta: x(t) = x o + t a, y(t) = y o +t b, z(t) = z o + t c (7) t pode ser um número real qualquer (isto é, t pode assumir todos os valores no intervalo (-, + )).
 = r o + t v (6) Se v = ai + bj + ck, obtemos as seguintes equações")
21 Fazemos agora um esboço da reta que é paralela a um dado vetor (2,5,3) e que contém o ponto (7,8,9). As equações paramétricas são x = t, y = t, z = t reset()://reta no 3-espaço dir:=plot::arrow3d([0,0,0],[2,5,3],color=rgb::red)://direçã o reta:=plot::curve3d([7+2*t,8+5*t,9+3*t], t=-4..1,color=rgb::green): ponto:=plot::point3d(7,8,9,color=rgb::black, PointSize=3*unit::mm): plot(dir,reta,ponto) Fig
22 Planos em forma de coordenadas cartesianas MuPAD oferece, a partir da versão 3, a nova função plot::implicit3d que é ideal para fazer gráficos de planos dados em forma implícita. A equação de um plano que passa pelo ponto (x o, y o ) é dada pela equação z = z o + m(x - x o ) + n(y - y o ) (6) m é a inclinação do plano na direção-x e n é sua inclinação na direção-y. A Eq. (6) é bem como a equação de uma reta, exceto que há duas inclinações em vez de uma. Com a Eq. (6) calculamos a coordenada-z do ponto do plano diretamente sobre o ponto (x, y) no plano-xy. A seguir alguns exemplos com planos verticais: plot(plot::implicit3d(x + y + 5, x = -5..5, y = -5..5, z = -5..5)) Fig
23 plot(plot::implicit3d(x + 2, x = -5..5, y = -5..5, z = -5..5)) Fig Na seguinte figura vemos uma cabana limitada pelos planos verticais x = 0, x = 8 (verde), y = 0 e y = 16 (azul). O teto é formado pelo plano z = 12 -x/4-y/8 (vermelho). Cortando os planos, obtemos para as alturas dos quatro cantos 10, 12, 10 e 8 metros, respectivamente. Na proxima seção vamos calcular o volume desta cabana forma. p1:=plot::implicit3d(z +x/4+y/8-12, x = 0..10, y = 0..18, z = 0..15):
24 p2:=plot::implicit3d(y - 16, x = 0..10, y = 0..18, z = 0..10): p3:=plot::implicit3d(x - 8, x = 0..10, y = 0..18, z = 0..10): p1::color:=rgb::red: p2::color:=rgb::blue: p3::color:=rgb::green: plot(p1,p2,p3) Fig
Universidade Federal do Paraná
 Universidade Federal do Paraná Setor de Ciências Exatas Departamento de Matematica Prof. Juan Carlos Vila Bravo Curitiba, 1 de Dezembro de 005 1. A posição de uma particula é dada por: r(t) = (sen t)i+(cost)j
Universidade Federal do Paraná Setor de Ciências Exatas Departamento de Matematica Prof. Juan Carlos Vila Bravo Curitiba, 1 de Dezembro de 005 1. A posição de uma particula é dada por: r(t) = (sen t)i+(cost)j
PARTE 2 FUNÇÕES VETORIAIS DE UMA VARIÁVEL REAL
 PARTE FUNÇÕES VETORIAIS DE UMA VARIÁVEL REAL.1 Funções Vetoriais de Uma Variável Real Vamos agora tratar de um caso particular de funções vetoriais F : Dom(f R n R m, que são as funções vetoriais de uma
PARTE FUNÇÕES VETORIAIS DE UMA VARIÁVEL REAL.1 Funções Vetoriais de Uma Variável Real Vamos agora tratar de um caso particular de funções vetoriais F : Dom(f R n R m, que são as funções vetoriais de uma
Seja D R. Uma função vetorial r(t) com domínio D é uma correspondência que associa a cada número t em D exatamente um vetor r(t) em R 3
 com domínio D é uma correspondência que associa a cada número t em D exatamente um vetor r(t) em R 3") 1 Universidade Salvador UNIFACS Cursos de Engenharia Cálculo IV Profa: Ilka Rebouças Freire Cálculo Vetorial Texto 01: Funções Vetoriais Até agora nos cursos de Cálculo só tratamos de funções cujas imagens
1 Universidade Salvador UNIFACS Cursos de Engenharia Cálculo IV Profa: Ilka Rebouças Freire Cálculo Vetorial Texto 01: Funções Vetoriais Até agora nos cursos de Cálculo só tratamos de funções cujas imagens
3.3 Espaço Tridimensional - R 3 - versão α 1 1
 1 3.3 Espaço Tridimensional - R 3 - versão α 1 1 3.3.1 Sistema de Coordenadas Tridimensionais Como vimos no caso do R, para localizar um ponto no plano precisamos de duas informações e assim um ponto P
1 3.3 Espaço Tridimensional - R 3 - versão α 1 1 3.3.1 Sistema de Coordenadas Tridimensionais Como vimos no caso do R, para localizar um ponto no plano precisamos de duas informações e assim um ponto P
Objetivos. Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas e
 MÓDULO 2 - AULA 13 Aula 13 Superfícies regradas e de revolução Objetivos Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas
MÓDULO 2 - AULA 13 Aula 13 Superfícies regradas e de revolução Objetivos Apresentar as superfícies regradas e superfícies de revolução. Analisar as propriedades que caracterizam as superfícies regradas
Exercícios resolvidos P2
 Exercícios resolvidos P Questão 1 Dena as funções seno hiperbólico e cosseno hiperbólico, respectivamente, por sinh(t) = et e t e cosh(t) = et + e t. (1) 1. Verique que estas funções satisfazem a seguinte
Exercícios resolvidos P Questão 1 Dena as funções seno hiperbólico e cosseno hiperbólico, respectivamente, por sinh(t) = et e t e cosh(t) = et + e t. (1) 1. Verique que estas funções satisfazem a seguinte
Curvas em coordenadas polares
 1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
1 Curvas em coordenadas polares As coordenadas polares nos dão uma maneira alternativa de localizar pontos no plano e são especialmente adequadas para expressar certas situações, como veremos a seguir.
Universidade Federal de Viçosa Departamento de Matemática 3 a Lista de exercícios de Cálculo III - MAT 241
 Universidade Federal de Viçosa Departamento de Matemática a Lista de exercícios de Cálculo III - MAT 41 1. Calcule, se existirem, as derivadas parciais f f (0, 0) e (0, 0) sendo: x + 4 (a) f(x, ) = x,
Universidade Federal de Viçosa Departamento de Matemática a Lista de exercícios de Cálculo III - MAT 41 1. Calcule, se existirem, as derivadas parciais f f (0, 0) e (0, 0) sendo: x + 4 (a) f(x, ) = x,
UNIVERSIDADE FEDERAL FLUMINENSE
 UNIVERSIDADE FEDERAL FLUMINENSE Escola de Engenharia Industrial Metalúrgica de Volta Redonda PROVAS RESOLVIDAS DE CÁLCULO VETORIAL Professora Salete Souza de Oliveira Aluna Thais Silva de Araujo P1 Turma
UNIVERSIDADE FEDERAL FLUMINENSE Escola de Engenharia Industrial Metalúrgica de Volta Redonda PROVAS RESOLVIDAS DE CÁLCULO VETORIAL Professora Salete Souza de Oliveira Aluna Thais Silva de Araujo P1 Turma
Exercícios: Funções e Campos Vetoriais
 Eercícios: Funções e Campos Vetoriais. Faça a representação gráfica dos campos vetoriais gerados por: a) V [, y] b) V y i j c) V [, y ]. Determine o lugar no espaço onde os vetores, do eercício anterior,
Eercícios: Funções e Campos Vetoriais. Faça a representação gráfica dos campos vetoriais gerados por: a) V [, y] b) V y i j c) V [, y ]. Determine o lugar no espaço onde os vetores, do eercício anterior,
Nesta aula iremos continuar com os exemplos de revisão.
 Capítulo 8 Nesta aula iremos continuar com os exemplos de revisão. 1. Exemplos de revisão Exemplo 1 Ache a equação do círculo C circunscrito ao triângulo de vértices A = (7, 3), B = (1, 9) e C = (5, 7).
Capítulo 8 Nesta aula iremos continuar com os exemplos de revisão. 1. Exemplos de revisão Exemplo 1 Ache a equação do círculo C circunscrito ao triângulo de vértices A = (7, 3), B = (1, 9) e C = (5, 7).
2.3 Aplicações das Leis de Newton
 2.3-1 2.3 Aplicações das Leis de Newton 2.3.1 Movimento tridimensional de um projétil (se despreza quaisquer efeitos do ar) Nesta seção retomamos a análise do movimento de um projétil, visando a obter
2.3-1 2.3 Aplicações das Leis de Newton 2.3.1 Movimento tridimensional de um projétil (se despreza quaisquer efeitos do ar) Nesta seção retomamos a análise do movimento de um projétil, visando a obter
LISTA DE EXERCÍCIOS DE CAMPOS CONSERVATIVOS NO PLANO E NO ESPAÇO. CURVAS PARAMETRIZADAS, INTEGRAIS DE LINHA (COM RESPEITO A COMPRIMENTO DE ARCO).
.") LISTA DE EXERCÍCIOS DE CAMPOS CONSERVATIVOS NO PLANO E NO ESPAÇO. CURVAS PARAMETRIZADAS, INTEGRAIS DE LINHA (COM RESPEITO A COMPRIMENTO DE ARCO. PROFESSOR: RICARDO SÁ EARP OBS: Faça os exercícios sobre
LISTA DE EXERCÍCIOS DE CAMPOS CONSERVATIVOS NO PLANO E NO ESPAÇO. CURVAS PARAMETRIZADAS, INTEGRAIS DE LINHA (COM RESPEITO A COMPRIMENTO DE ARCO. PROFESSOR: RICARDO SÁ EARP OBS: Faça os exercícios sobre
IBM1018 Física Básica II FFCLRP USP Prof. Antônio Roque Aula 6. O trabalho feito pela força para deslocar o corpo de a para b é dado por: = =
 Energia Potencial Elétrica Física I revisitada 1 Seja um corpo de massa m que se move em linha reta sob ação de uma força F que atua ao longo da linha. O trabalho feito pela força para deslocar o corpo
Energia Potencial Elétrica Física I revisitada 1 Seja um corpo de massa m que se move em linha reta sob ação de uma força F que atua ao longo da linha. O trabalho feito pela força para deslocar o corpo
4.2 Produto Vetorial. Orientação sobre uma reta r
 94 4. Produto Vetorial Dados dois vetores u e v no espaço, vamos definir um novo vetor, ortogonal a u e v, denotado por u v (ou u v, em outros textos) e denominado produto vetorial de u e v. Mas antes,
94 4. Produto Vetorial Dados dois vetores u e v no espaço, vamos definir um novo vetor, ortogonal a u e v, denotado por u v (ou u v, em outros textos) e denominado produto vetorial de u e v. Mas antes,
Campos Vetoriais e Integrais de Linha
 Cálculo III Departamento de Matemática - ICEx - UFMG Marcelo Terra Cunha Campos Vetoriais e Integrais de Linha Um segundo objeto de interesse do Cálculo Vetorial são os campos de vetores, que surgem principalmente
Cálculo III Departamento de Matemática - ICEx - UFMG Marcelo Terra Cunha Campos Vetoriais e Integrais de Linha Um segundo objeto de interesse do Cálculo Vetorial são os campos de vetores, que surgem principalmente
A abordagem do assunto será feita inicialmente explorando uma curva bastante conhecida: a circunferência. Escolheremos como y
 5 Taxa de Variação Neste capítulo faremos uso da derivada para resolver certos tipos de problemas relacionados com algumas aplicações físicas e geométricas. Nessas aplicações nem sempre as funções envolvidas
5 Taxa de Variação Neste capítulo faremos uso da derivada para resolver certos tipos de problemas relacionados com algumas aplicações físicas e geométricas. Nessas aplicações nem sempre as funções envolvidas
GAAL - 2013/1 - Simulado - 1 Vetores e Produto Escalar
 GAAL - 201/1 - Simulado - 1 Vetores e Produto Escalar SOLUÇÕES Exercício 1: Determinar os três vértices de um triângulo sabendo que os pontos médios de seus lados são M = (5, 0, 2), N = (, 1, ) e P = (4,
GAAL - 201/1 - Simulado - 1 Vetores e Produto Escalar SOLUÇÕES Exercício 1: Determinar os três vértices de um triângulo sabendo que os pontos médios de seus lados são M = (5, 0, 2), N = (, 1, ) e P = (4,
Aula 6 Derivadas Direcionais e o Vetor Gradiente
 Aula 6 Derivadas Direcionais e o Vetor Gradiente MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
Aula 6 Derivadas Direcionais e o Vetor Gradiente MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
Aula 18 Elipse. Objetivos
 MÓDULO 1 - AULA 18 Aula 18 Elipse Objetivos Descrever a elipse como um lugar geométrico. Determinar a equação reduzida da elipse no sistema de coordenadas com origem no ponto médio entre os focos e eixo
MÓDULO 1 - AULA 18 Aula 18 Elipse Objetivos Descrever a elipse como um lugar geométrico. Determinar a equação reduzida da elipse no sistema de coordenadas com origem no ponto médio entre os focos e eixo
Aula 9 Plano tangente, diferencial e gradiente
 MÓDULO 1 AULA 9 Aula 9 Plano tangente, diferencial e gradiente Objetivos Aprender o conceito de plano tangente ao gráfico de uma função diferenciável de duas variáveis. Conhecer a notação clássica para
MÓDULO 1 AULA 9 Aula 9 Plano tangente, diferencial e gradiente Objetivos Aprender o conceito de plano tangente ao gráfico de uma função diferenciável de duas variáveis. Conhecer a notação clássica para
IBM1018 Física Básica II FFCLRP USP Prof. Antônio Roque Aula 3
 Linhas de Força Mencionamos na aula passada que o físico inglês Michael Faraday (79-867) introduziu o conceito de linha de força para visualizar a interação elétrica entre duas cargas. Para Faraday, as
Linhas de Força Mencionamos na aula passada que o físico inglês Michael Faraday (79-867) introduziu o conceito de linha de força para visualizar a interação elétrica entre duas cargas. Para Faraday, as
Cap. 4 - Princípios da Dinâmica
 Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 4 - Princípios da Dinâmica e suas Aplicações Prof. Elvis Soares 1 Leis de Newton Primeira Lei de Newton: Um corpo permanece
Universidade Federal do Rio de Janeiro Instituto de Física Física I IGM1 2014/1 Cap. 4 - Princípios da Dinâmica e suas Aplicações Prof. Elvis Soares 1 Leis de Newton Primeira Lei de Newton: Um corpo permanece
9. Derivadas de ordem superior
 9. Derivadas de ordem superior Se uma função f for derivável, então f é chamada a derivada primeira de f (ou de ordem 1). Se a derivada de f eistir, então ela será chamada derivada segunda de f (ou de
9. Derivadas de ordem superior Se uma função f for derivável, então f é chamada a derivada primeira de f (ou de ordem 1). Se a derivada de f eistir, então ela será chamada derivada segunda de f (ou de
2 A Derivada. 2.1 Velocidade Média e Velocidade Instantânea
 2 O objetivo geral desse curso de Cálculo será o de estudar dois conceitos básicos: a Derivada e a Integral. No decorrer do curso esses dois conceitos, embora motivados de formas distintas, serão por mais
2 O objetivo geral desse curso de Cálculo será o de estudar dois conceitos básicos: a Derivada e a Integral. No decorrer do curso esses dois conceitos, embora motivados de formas distintas, serão por mais
Lista de Exercícios - Integrais
 Lista de Exercícios - Integrais 4) Calcule as integrais indefinidas: 5) Calcule as integrais indefinidas: 1 6) Suponha f(x) uma função conhecida e que queiramos encontrar uma função F(x), tal que y = F(x)
Lista de Exercícios - Integrais 4) Calcule as integrais indefinidas: 5) Calcule as integrais indefinidas: 1 6) Suponha f(x) uma função conhecida e que queiramos encontrar uma função F(x), tal que y = F(x)
INTRODUÇÃO AO ESTUDO DE EQUAÇÕES DIFERENCIAIS
 INTRODUÇÃO AO ESTUDO DE EQUAÇÕES DIFERENCIAIS Terminologia e Definições Básicas No curso de cálculo você aprendeu que, dada uma função y f ( ), a derivada f '( ) d é também, ela mesma, uma função de e
INTRODUÇÃO AO ESTUDO DE EQUAÇÕES DIFERENCIAIS Terminologia e Definições Básicas No curso de cálculo você aprendeu que, dada uma função y f ( ), a derivada f '( ) d é também, ela mesma, uma função de e
APLICAÇÕES DA DERIVADA
 Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Notas de Aula: Aplicações das Derivadas APLICAÇÕES DA DERIVADA Vimos, na seção anterior, que a derivada de uma função pode ser interpretada como o coeficiente angular da reta tangente ao seu gráfico. Nesta,
Movimentos Periódicos: representação vetorial
 Aula 5 00 Movimentos Periódicos: representação vetorial A experiência mostra que uma das maneiras mais úteis de descrever o movimento harmônico simples é representando-o como uma projeção perpendicular
Aula 5 00 Movimentos Periódicos: representação vetorial A experiência mostra que uma das maneiras mais úteis de descrever o movimento harmônico simples é representando-o como uma projeção perpendicular
Unidade: Vetores e Forças. Unidade I:
 Unidade I: 0 Unidade: Vetores e Forças 2.VETORES 2.1 Introdução Os vetores são definidos como entes matemáticos que dão noção de intensidade, direção e sentido. De forma prática, o conceito de vetor pode
Unidade I: 0 Unidade: Vetores e Forças 2.VETORES 2.1 Introdução Os vetores são definidos como entes matemáticos que dão noção de intensidade, direção e sentido. De forma prática, o conceito de vetor pode
Curso de Engenharia Civil. Física Geral e Experimental I Movimento Prof.a: Msd. Érica Muniz 1 Período
 Curso de Engenharia Civil Física Geral e Experimental I Movimento Prof.a: Msd. Érica Muniz 1 Período Posição e Coordenada de Referência Posição é o lugar no espaço onde se situa o corpo. Imagine três pontos
Curso de Engenharia Civil Física Geral e Experimental I Movimento Prof.a: Msd. Érica Muniz 1 Período Posição e Coordenada de Referência Posição é o lugar no espaço onde se situa o corpo. Imagine três pontos
Lista 2 - Vetores II. Prof. Edu Física 2. O que é necessário para determinar (caracterizar) uma: a) grandeza escalar? b) grandeza vetorial?
 uma: a) grandeza escalar? b) grandeza vetorial?") Lista 2 - Vetores II O que é necessário para determinar (caracterizar) uma: a) grandeza escalar? grandeza vetorial?. Em que consiste a orientação espacial? 2. lassifique os itens abaixo em grandeza escalar
Lista 2 - Vetores II O que é necessário para determinar (caracterizar) uma: a) grandeza escalar? grandeza vetorial?. Em que consiste a orientação espacial? 2. lassifique os itens abaixo em grandeza escalar
PROFº. LUIS HENRIQUE MATEMÁTICA
 Geometria Analítica A Geometria Analítica, famosa G.A., ou conhecida como Geometria Cartesiana, é o estudo dos elementos geométricos no plano cartesiano. PLANO CARTESIANO O sistema cartesiano de coordenada,
Geometria Analítica A Geometria Analítica, famosa G.A., ou conhecida como Geometria Cartesiana, é o estudo dos elementos geométricos no plano cartesiano. PLANO CARTESIANO O sistema cartesiano de coordenada,
MAT2454 - Cálculo Diferencial e Integral para Engenharia II
 MAT454 - Cálculo Diferencial e Integral para Engenharia II a Lista de Exercícios -. Ache os pontos do hiperboloide x y + z = onde a reta normal é paralela à reta que une os pontos (,, ) e (5,, 6).. Encontre
MAT454 - Cálculo Diferencial e Integral para Engenharia II a Lista de Exercícios -. Ache os pontos do hiperboloide x y + z = onde a reta normal é paralela à reta que une os pontos (,, ) e (5,, 6).. Encontre
Resumo com exercícios resolvidos do assunto: Funções de duas ou mais variáveis.
 www.engenhariafacil.weebly.com Resumo com exercícios resolvidos do assunto: (I) (II) (III) Funções de duas ou mais variáveis; Limites; Continuidade. (I) Funções de duas ou mais variáveis. No Cálculo I
www.engenhariafacil.weebly.com Resumo com exercícios resolvidos do assunto: (I) (II) (III) Funções de duas ou mais variáveis; Limites; Continuidade. (I) Funções de duas ou mais variáveis. No Cálculo I
Tópico 02: Movimento Circular Uniforme; Aceleração Centrípeta
 Aula 03: Movimento em um Plano Tópico 02: Movimento Circular Uniforme; Aceleração Centrípeta Caro aluno, olá! Neste tópico, você vai aprender sobre um tipo particular de movimento plano, o movimento circular
Aula 03: Movimento em um Plano Tópico 02: Movimento Circular Uniforme; Aceleração Centrípeta Caro aluno, olá! Neste tópico, você vai aprender sobre um tipo particular de movimento plano, o movimento circular
Geometria Analítica e Vetorial - Daniel Miranda, Rafael Grisi, Sinuê Lodovici
 8 C U RVA S 8.1 parametrização de curvas No Capítulo 3 estudamos as equações de uma reta no espaço e vimos que tal entidade geométrica pode ser representada pelas equações paramétricas: x r : z = a+v 1
8 C U RVA S 8.1 parametrização de curvas No Capítulo 3 estudamos as equações de uma reta no espaço e vimos que tal entidade geométrica pode ser representada pelas equações paramétricas: x r : z = a+v 1
4.2 A lei da conservação do momento angular
 4.2-1 4.2 A lei da conservação do momento angular 4.2.1 O momento angular e o torque Até agora, não fizemos uso da segunda parte das experiências de Mach, ver capítulo 2, Eq. (2.3). Heis aqui outra vez
4.2-1 4.2 A lei da conservação do momento angular 4.2.1 O momento angular e o torque Até agora, não fizemos uso da segunda parte das experiências de Mach, ver capítulo 2, Eq. (2.3). Heis aqui outra vez
A equação da posição em função do tempo t do MRUV - movimento retilíneo uniformemente variado é:
 Modellus Atividade 3 Queda livre. Do alto de duas torres, uma na Terra e outra na Lua, deixaram-se cair duas pedras, sem velocidade inicial. Considerando que cada uma das pedras leva 3,0s atingir o solo
Modellus Atividade 3 Queda livre. Do alto de duas torres, uma na Terra e outra na Lua, deixaram-se cair duas pedras, sem velocidade inicial. Considerando que cada uma das pedras leva 3,0s atingir o solo
(x, y) = (a, b) + t*(c-a, d-b) ou: x = a + t*(c-a) y = b + t*(d-b)
 = (a, b) + t*(c-a, d-b) ou: x = a + t*(c-a) y = b + t*(d-b)") Equação Vetorial da Reta Dois pontos P e Q, definem um único vetor v = PQ, que representa uma direção. Todo ponto R cuja direção PR seja a mesma de PQ está contido na mesma reta definida pelos pontos P
Equação Vetorial da Reta Dois pontos P e Q, definem um único vetor v = PQ, que representa uma direção. Todo ponto R cuja direção PR seja a mesma de PQ está contido na mesma reta definida pelos pontos P
( ) ( ) ( ( ) ( )) ( )
 ( ) ( ( ) ( )) ( )") Física 0 Duas partículas A e, de massa m, executam movimentos circulares uniormes sobre o plano x (x e representam eixos perpendiculares) com equações horárias dadas por xa ( t ) = a+acos ( ωt ), ( t )
Física 0 Duas partículas A e, de massa m, executam movimentos circulares uniormes sobre o plano x (x e representam eixos perpendiculares) com equações horárias dadas por xa ( t ) = a+acos ( ωt ), ( t )
3.4 Movimento ao longo de uma curva no espaço (terça parte)
") 3.4-41 3.4 Movimento ao longo de uma curva no espaço (terça parte) Antes de começar com a nova matéria, vamos considerar um problema sobre o material recentemente visto. Problema: (Projeção de uma trajetória
3.4-41 3.4 Movimento ao longo de uma curva no espaço (terça parte) Antes de começar com a nova matéria, vamos considerar um problema sobre o material recentemente visto. Problema: (Projeção de uma trajetória
4.1 Funções de varias variáveis - Definição e exemplos
 Capítulo 4 Funções de duas variáveis 4.1 Funções de varias variáveis - Definição e eemplos Definição 1: Chamamos de função real com n variáveis a uma função do tipo f : D R com D R n = R R. Ou seja, uma
Capítulo 4 Funções de duas variáveis 4.1 Funções de varias variáveis - Definição e eemplos Definição 1: Chamamos de função real com n variáveis a uma função do tipo f : D R com D R n = R R. Ou seja, uma
4.1A Esboce o grá co de cada curva dada abaixo, indicando a orientação positiva. cos (1=t), para 0 < t 1 e y 0 (0) = 0. Sendo esta derivada
, para 0 < t 1 e y 0 (0) = 0. Sendo esta derivada") 4.1 Curvas Regulares 4.1A Esboce o grá co de cada curva dada abaixo, indicando a orientação positiva. (a) ~r (t) = t~i + (1 t)~j; 0 t 1 (b) ~r (t) = 2t~i + t 2 ~j; 1 t 0 (c) ~r (t) = (1=t)~i + t~j; 1 t
4.1 Curvas Regulares 4.1A Esboce o grá co de cada curva dada abaixo, indicando a orientação positiva. (a) ~r (t) = t~i + (1 t)~j; 0 t 1 (b) ~r (t) = 2t~i + t 2 ~j; 1 t 0 (c) ~r (t) = (1=t)~i + t~j; 1 t
Ponto, reta e plano no espaço tridimensional, cont.
 Ponto, reta e plano no espaço tridimensional, cont. Matemática para arquitetura Ton Marar 1. Posições relativas Posição relativa entre pontos Dois pontos estão sempre alinhados. Três pontos P 1 = (x 1,
Ponto, reta e plano no espaço tridimensional, cont. Matemática para arquitetura Ton Marar 1. Posições relativas Posição relativa entre pontos Dois pontos estão sempre alinhados. Três pontos P 1 = (x 1,
Resolução da Prova da Escola Naval 2009. Matemática Prova Azul
 Resolução da Prova da Escola Naval 29. Matemática Prova Azul GABARITO D A 2 E 2 E B C 4 D 4 C 5 D 5 A 6 E 6 C 7 B 7 B 8 D 8 E 9 A 9 A C 2 B. Os 6 melhores alunos do Colégio Naval submeteram-se a uma prova
Resolução da Prova da Escola Naval 29. Matemática Prova Azul GABARITO D A 2 E 2 E B C 4 D 4 C 5 D 5 A 6 E 6 C 7 B 7 B 8 D 8 E 9 A 9 A C 2 B. Os 6 melhores alunos do Colégio Naval submeteram-se a uma prova
As assíntotas são retas que passam no centro da hipérbole e tem coeficiente angular m = b / a e m = b / a, logo temos:
 Exercício 01. Dada à hipérbole de equação 5x 2 4y 2 20x 8y 4 = 0 determine os focos e as equações das assintotas. Escrevendo a hipérbole da maneira convencional teríamos 5[x 2 4x + 4 4] 4[y 2 + 2y + 1]
Exercício 01. Dada à hipérbole de equação 5x 2 4y 2 20x 8y 4 = 0 determine os focos e as equações das assintotas. Escrevendo a hipérbole da maneira convencional teríamos 5[x 2 4x + 4 4] 4[y 2 + 2y + 1]
Tópico 8. Aula Prática: Movimento retilíneo uniforme e uniformemente variado (Trilho de ar)
") Tópico 8. Aula Prática: Movimento retilíneo uniforme e uniformemente variado (Trilho de ar) 1. OBJETIVOS DA EXPERIÊNCIA 1) Esta aula experimental tem como objetivo o estudo do movimento retilíneo uniforme
Tópico 8. Aula Prática: Movimento retilíneo uniforme e uniformemente variado (Trilho de ar) 1. OBJETIVOS DA EXPERIÊNCIA 1) Esta aula experimental tem como objetivo o estudo do movimento retilíneo uniforme
NÍVEL BÁSICO CAPÍTULO III
 UNIVERSIDADE FEDERAL DO PARÁ CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO PROGRAMA DE EDUCAÇÃO TUTORIAL SEMANA DOS 40 ANOS DE ENGENHARIA ELÉTRICA NÍVEL BÁSICO CAPÍTULO III PROGRAMA
UNIVERSIDADE FEDERAL DO PARÁ CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO PROGRAMA DE EDUCAÇÃO TUTORIAL SEMANA DOS 40 ANOS DE ENGENHARIA ELÉTRICA NÍVEL BÁSICO CAPÍTULO III PROGRAMA
Departamento de Matemática - UEL - 2010. Ulysses Sodré. http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
 Matemática Essencial Extremos de funções reais Departamento de Matemática - UEL - 2010 Conteúdo Ulysses Sodré http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
Matemática Essencial Extremos de funções reais Departamento de Matemática - UEL - 2010 Conteúdo Ulysses Sodré http://www.mat.uel.br/matessencial/ Arquivo: minimaxi.tex - Londrina-PR, 29 de Junho de 2010.
4. Curvas planas. T = κn, N = κt, B = 0.
 4. CURVAS PLANAS 35 4. Curvas planas Nesta secção veremos que no caso planar é possível refinar a definição de curvatura, de modo a dar-lhe uma interpretação geométrica interessante. Provaremos ainda o
4. CURVAS PLANAS 35 4. Curvas planas Nesta secção veremos que no caso planar é possível refinar a definição de curvatura, de modo a dar-lhe uma interpretação geométrica interessante. Provaremos ainda o
Análise Dimensional Notas de Aula
 Primeira Edição Análise Dimensional Notas de Aula Prof. Ubirajara Neves Fórmulas dimensionais 1 As fórmulas dimensionais são formas usadas para expressar as diferentes grandezas físicas em função das grandezas
Primeira Edição Análise Dimensional Notas de Aula Prof. Ubirajara Neves Fórmulas dimensionais 1 As fórmulas dimensionais são formas usadas para expressar as diferentes grandezas físicas em função das grandezas
IBM1018 Física Básica II FFCLRP USP Prof. Antônio Roque Aula 4
 Lei de Gauss Considere uma distribuição arbitrária de cargas ou um corpo carregado no espaço. Imagine agora uma superfície fechada qualquer envolvendo essa distribuição ou corpo. A superfície é imaginária,
Lei de Gauss Considere uma distribuição arbitrária de cargas ou um corpo carregado no espaço. Imagine agora uma superfície fechada qualquer envolvendo essa distribuição ou corpo. A superfície é imaginária,
1. (Upe 2014) O deslocamento Δ x de uma partícula em função do tempo t é ilustrado no gráfico a seguir:
 O deslocamento Δ x de uma partícula em função do tempo t é ilustrado no gráfico a seguir:") 1. (Upe 2014) O deslocamento Δ x de uma partícula em função do tempo t é ilustrado no gráfico a seguir: Com relação ao movimento mostrado no gráfico, assinale a alternativa CORRETA. a) A partícula inicia
1. (Upe 2014) O deslocamento Δ x de uma partícula em função do tempo t é ilustrado no gráfico a seguir: Com relação ao movimento mostrado no gráfico, assinale a alternativa CORRETA. a) A partícula inicia
Provas Comentadas OBF/2011
 PROFESSORES: Daniel Paixão, Deric Simão, Edney Melo, Ivan Peixoto, Leonardo Bruno, Rodrigo Lins e Rômulo Mendes COORDENADOR DE ÁREA: Prof. Edney Melo 1. Um foguete de 1000 kg é lançado da superfície da
PROFESSORES: Daniel Paixão, Deric Simão, Edney Melo, Ivan Peixoto, Leonardo Bruno, Rodrigo Lins e Rômulo Mendes COORDENADOR DE ÁREA: Prof. Edney Melo 1. Um foguete de 1000 kg é lançado da superfície da
6. Geometria, Primitivas e Transformações 3D
 6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
6. Geometria, Primitivas e Transformações 3D Até agora estudamos e implementamos um conjunto de ferramentas básicas que nos permitem modelar, ou representar objetos bi-dimensionais em um sistema também
Aula 19 Teorema Fundamental das Integrais de Linha
 Aula 19 Teorema Fundamental das Integrais de Linha MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade
Aula 19 Teorema Fundamental das Integrais de Linha MA211 - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade
Aplicações de Derivadas
 Aplicações de Derivadas f seja contínua no [a,b] e que f '(x) exista no intervalo aberto a x b. Então, existe pelo menos um valor c entre a eb, tal que f '(c) f (b) f (a) b a. pelo menos um ponto c (a,
Aplicações de Derivadas f seja contínua no [a,b] e que f '(x) exista no intervalo aberto a x b. Então, existe pelo menos um valor c entre a eb, tal que f '(c) f (b) f (a) b a. pelo menos um ponto c (a,
As cônicas. c, a 2 elipse é uma curva do plano em que qualquer um de seus pontos, por exemplo,, satisfaz a relação:
 As cônicas As cônicas podem ser definidas a partir de certas relações que caracterizam seus pontos. A partir delas podemos obter suas equações analíticas e, a partir delas, suas propriedades.. A elipse
As cônicas As cônicas podem ser definidas a partir de certas relações que caracterizam seus pontos. A partir delas podemos obter suas equações analíticas e, a partir delas, suas propriedades.. A elipse
CINEMÁTICA - É a parte da mecânica que estuda os vários tipos de movimento, sem se preocupar com as causas destes movimentos.
 INTRODUÇÃO À CINEMÁTICA REPOUSO OU MOVIMENTO? DEPENDE DO REFERENCIAL! CINEMÁTICA - É a parte da mecânica que estuda os vários tipos de movimento, sem se preocupar com as causas destes movimentos. REFERENCIAL.
INTRODUÇÃO À CINEMÁTICA REPOUSO OU MOVIMENTO? DEPENDE DO REFERENCIAL! CINEMÁTICA - É a parte da mecânica que estuda os vários tipos de movimento, sem se preocupar com as causas destes movimentos. REFERENCIAL.
O coeficiente angular
 A UA UL LA O coeficiente angular Introdução O coeficiente angular de uma reta já apareceu na Aula 30. Agora, com os conhecimentos obtidos nas Aulas 40 e 45, vamos explorar mais esse conceito e descobrir
A UA UL LA O coeficiente angular Introdução O coeficiente angular de uma reta já apareceu na Aula 30. Agora, com os conhecimentos obtidos nas Aulas 40 e 45, vamos explorar mais esse conceito e descobrir
7 AULA. Curvas Polares LIVRO. META Estudar as curvas planas em coordenadas polares (Curvas Polares).
.") 1 LIVRO Curvas Polares 7 AULA META Estudar as curvas planas em coordenadas polares (Curvas Polares). OBJETIVOS Estudar movimentos de partículas no plano. Cálculos com curvas planas em coordenadas polares.
1 LIVRO Curvas Polares 7 AULA META Estudar as curvas planas em coordenadas polares (Curvas Polares). OBJETIVOS Estudar movimentos de partículas no plano. Cálculos com curvas planas em coordenadas polares.
4.2 Teorema do Valor Médio. Material online: h-p://www.im.ufal.br/professor/thales/calc1-2010_2.html
 4.2 Teorema do Valor Médio Material online: h-p://www.im.ufal.br/professor/thales/calc1-2010_2.html Teorema de Rolle: Seja f uma função que satisfaça as seguintes hipóteses: a) f é contínua no intervalo
4.2 Teorema do Valor Médio Material online: h-p://www.im.ufal.br/professor/thales/calc1-2010_2.html Teorema de Rolle: Seja f uma função que satisfaça as seguintes hipóteses: a) f é contínua no intervalo
Conceitos Fundamentais
 Capítulo 1 Conceitos Fundamentais Objetivos: No final do Capítulo o aluno deve saber: 1. distinguir o uso de vetores na Física e na Matemática; 2. resolver sistema lineares pelo método de Gauss-Jordan;
Capítulo 1 Conceitos Fundamentais Objetivos: No final do Capítulo o aluno deve saber: 1. distinguir o uso de vetores na Física e na Matemática; 2. resolver sistema lineares pelo método de Gauss-Jordan;
Resolução dos Exercícios sobre Derivadas
 Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva nos pontos onde e Vamos determinar a reta tangente à curva nos pontos de abscissas
Resolução dos Eercícios sobre Derivadas Eercício Utilizando a idéia do eemplo anterior, encontre a reta tangente à curva nos pontos onde e Vamos determinar a reta tangente à curva nos pontos de abscissas
1 Módulo ou norma de um vetor
 Álgebra Linear I - Aula 3-2005.2 Roteiro 1 Módulo ou norma de um vetor A norma ou módulo do vetor ū = (u 1, u 2, u 3 ) de R 3 é ū = u 2 1 + u2 2 + u2 3. Geometricamente a fórmula significa que o módulo
Álgebra Linear I - Aula 3-2005.2 Roteiro 1 Módulo ou norma de um vetor A norma ou módulo do vetor ū = (u 1, u 2, u 3 ) de R 3 é ū = u 2 1 + u2 2 + u2 3. Geometricamente a fórmula significa que o módulo
Cotagens especiais. Você já aprendeu a interpretar cotas básicas
 A UU L AL A Cotagens especiais Você já aprendeu a interpretar cotas básicas e cotas de alguns tipos de elementos em desenhos técnicos de modelos variados. Mas, há alguns casos especiais de cotagem que
A UU L AL A Cotagens especiais Você já aprendeu a interpretar cotas básicas e cotas de alguns tipos de elementos em desenhos técnicos de modelos variados. Mas, há alguns casos especiais de cotagem que
UNIVERSIDADE CATÓLICA DE GOIÁS. DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplina: FÍSICA GERAL E EXPERIMENTAL I (MAF 2201) Prof.
 Prof.") 01 UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplina: FÍSICA GERAL E EXPERIMENTAL I (MAF 2201) Prof. EDSON VAZ NOTA DE AULA III (Capítulo 7 e 8) CAPÍTULO 7 ENERGIA CINÉTICA
01 UNIVERSIDADE CATÓLICA DE GOIÁS DEPARTAMENTO DE MATEMÁTICA E FÍSICA Disciplina: FÍSICA GERAL E EXPERIMENTAL I (MAF 2201) Prof. EDSON VAZ NOTA DE AULA III (Capítulo 7 e 8) CAPÍTULO 7 ENERGIA CINÉTICA
POTENCIAL ELÉTRICO. por unidade de carga
 POTENCIAL ELÉTRICO A lei de Newton da Gravitação e a lei de Coulomb da eletrostática são matematicamente idênticas, então os aspectos gerais discutidos para a força gravitacional podem ser aplicadas para
POTENCIAL ELÉTRICO A lei de Newton da Gravitação e a lei de Coulomb da eletrostática são matematicamente idênticas, então os aspectos gerais discutidos para a força gravitacional podem ser aplicadas para
Curvas e Superfícies no Espaço através de Exemplos. 1. Reta tangente, plano normal, vetor normal
 Curvas e Superfícies no Espaço através de Exemplos Fernando Deeke Sasse UDESC-Joinville 1. Reta tangente, plano normal, vetor normal Curva dada por função vetorial 1. Encontrar o vetor tangente, a equação
Curvas e Superfícies no Espaço através de Exemplos Fernando Deeke Sasse UDESC-Joinville 1. Reta tangente, plano normal, vetor normal Curva dada por função vetorial 1. Encontrar o vetor tangente, a equação
Projeção ortográfica da figura plana
 A U L A Projeção ortográfica da figura plana Introdução As formas de um objeto representado em perspectiva isométrica apresentam certa deformação, isto é, não são mostradas em verdadeira grandeza, apesar
A U L A Projeção ortográfica da figura plana Introdução As formas de um objeto representado em perspectiva isométrica apresentam certa deformação, isto é, não são mostradas em verdadeira grandeza, apesar
Uma lei que associa mais de um valor y a um valor x é uma relação, mas não uma função. O contrário é verdadeiro (isto é, toda função é uma relação).
.") 5. FUNÇÕES DE UMA VARIÁVEL 5.1. INTRODUÇÃO Devemos compreender função como uma lei que associa um valor x pertencente a um conjunto A a um único valor y pertencente a um conjunto B, ao que denotamos por
5. FUNÇÕES DE UMA VARIÁVEL 5.1. INTRODUÇÃO Devemos compreender função como uma lei que associa um valor x pertencente a um conjunto A a um único valor y pertencente a um conjunto B, ao que denotamos por
Vetores. Definição geométrica de vetores
 Vetores Várias grandezas físicas, tais como por exemplo comprimento, área, olume, tempo, massa e temperatura são completamente descritas uma ez que a magnitude (intensidade) é dada. Tais grandezas são
Vetores Várias grandezas físicas, tais como por exemplo comprimento, área, olume, tempo, massa e temperatura são completamente descritas uma ez que a magnitude (intensidade) é dada. Tais grandezas são
UNIVERSIDADE ESTADUAL DE SANTA CRUZ - UESC DEPARTAMENTO DE CIÊNCIAS EXATAS E TECNOLÓGICAS - DCET GEOMETRIA ANALÍTICA ASSUNTO: CÔNICAS
 UNIVERSIDADE ESTADUAL DE SANTA CRUZ - UESC DEPARTAMENTO DE CIÊNCIAS EXATAS E TECNOLÓGICAS - DCET GEOMETRIA ANALÍTICA ASSUNTO: CÔNICAS. Usando a definição de parábola determinar, em cada um dos itens a
UNIVERSIDADE ESTADUAL DE SANTA CRUZ - UESC DEPARTAMENTO DE CIÊNCIAS EXATAS E TECNOLÓGICAS - DCET GEOMETRIA ANALÍTICA ASSUNTO: CÔNICAS. Usando a definição de parábola determinar, em cada um dos itens a
RESUMO 2 - FÍSICA III
 RESUMO 2 - FÍSICA III CAMPO ELÉTRICO Assim como a Terra tem um campo gravitacional, uma carga Q também tem um campo que pode influenciar as cargas de prova q nele colocadas. E usando esta analogia, podemos
RESUMO 2 - FÍSICA III CAMPO ELÉTRICO Assim como a Terra tem um campo gravitacional, uma carga Q também tem um campo que pode influenciar as cargas de prova q nele colocadas. E usando esta analogia, podemos
Por que o quadrado de terminados em 5 e ta o fa cil? Ex.: 15²=225, 75²=5625,...
 Por que o quadrado de terminados em 5 e ta o fa cil? Ex.: 15²=225, 75²=5625,... 0) O que veremos na aula de hoje? Um fato interessante Produtos notáveis Equação do 2º grau Como fazer a questão 5 da 3ª
Por que o quadrado de terminados em 5 e ta o fa cil? Ex.: 15²=225, 75²=5625,... 0) O que veremos na aula de hoje? Um fato interessante Produtos notáveis Equação do 2º grau Como fazer a questão 5 da 3ª
Gnuplot: Exercícios do livro do Thomas - 2
 Gnuplot: Exercícios do livro do Thomas - 2 Ulysses Sodré e Sônia F. L. Toffoli Londrina-PR, 27 de Junho de 2007, arquivo: sacgnu02.tex 1 Mudando a lista de configuração 1. Após plotar a função f(x) = x
Gnuplot: Exercícios do livro do Thomas - 2 Ulysses Sodré e Sônia F. L. Toffoli Londrina-PR, 27 de Junho de 2007, arquivo: sacgnu02.tex 1 Mudando a lista de configuração 1. Após plotar a função f(x) = x
Seno de 30 é um meio?
 Seno de 30 é um meio? Adaptado do artigo de Renate Watanabe Acontecem fatos estranhos quando se ensina Trigonometria: Observe as tabelas abaixo, contendo alguns valores de duas funções f e g. x f(x) x
Seno de 30 é um meio? Adaptado do artigo de Renate Watanabe Acontecem fatos estranhos quando se ensina Trigonometria: Observe as tabelas abaixo, contendo alguns valores de duas funções f e g. x f(x) x
ITA - 2005 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR
 ITA - 2005 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR Matemática Questão 01 Considere os conjuntos S = {0,2,4,6}, T = {1,3,5} e U = {0,1} e as afirmações: I. {0} S e S U. II. {2} S\U e S T U={0,1}.
ITA - 2005 3º DIA MATEMÁTICA BERNOULLI COLÉGIO E PRÉ-VESTIBULAR Matemática Questão 01 Considere os conjuntos S = {0,2,4,6}, T = {1,3,5} e U = {0,1} e as afirmações: I. {0} S e S U. II. {2} S\U e S T U={0,1}.
Lista de exercícios nº 2
 F107 Física (Biologia) Turma B Prof. Odilon D. D. Couto Jr. Lista de exercícios nº 2 MOVIMENTO EM UMA DIMENSÃO Exercício 1: A velocidade escalar média é definida como a razão entre a distância total percorrida
F107 Física (Biologia) Turma B Prof. Odilon D. D. Couto Jr. Lista de exercícios nº 2 MOVIMENTO EM UMA DIMENSÃO Exercício 1: A velocidade escalar média é definida como a razão entre a distância total percorrida
2 Descrição do movimento de um ponto material no espaço e no tempo
 2 Descrição do movimento de um ponto material no espaço e no tempo 2.1. Num instante t i um corpo parte de um ponto x i num movimento de translação a uma dimensão, com módulo da velocidade v i e aceleração
2 Descrição do movimento de um ponto material no espaço e no tempo 2.1. Num instante t i um corpo parte de um ponto x i num movimento de translação a uma dimensão, com módulo da velocidade v i e aceleração
Já vimos que a energia gravitacional entre duas partículas de massas m 1 e m 2, com vetores posição em r 1 e r 2, respectivamente, é dada por
 Força conservativa Já vimos que a energia gravitacional entre duas partículas de massas m 1 e m 2, com vetores posição em r 1 e r 2, respectivamente, é dada por U 12 = Gm 1m 2 r 2 r 1. Vimos também que
Força conservativa Já vimos que a energia gravitacional entre duas partículas de massas m 1 e m 2, com vetores posição em r 1 e r 2, respectivamente, é dada por U 12 = Gm 1m 2 r 2 r 1. Vimos também que
1 O Movimento dos Corpos
 1.3-1 1 O Movimento dos Corpos 1.3 Gotas de chuva e pára-quedistas (v'(t) = - g - rv(t)) Em ambos os casos trata-se de objetos que caem de grandes alturas e que são freados pela resistência aerodinâmica.
1.3-1 1 O Movimento dos Corpos 1.3 Gotas de chuva e pára-quedistas (v'(t) = - g - rv(t)) Em ambos os casos trata-se de objetos que caem de grandes alturas e que são freados pela resistência aerodinâmica.
5910170 Física II Ondas, Fluidos e Termodinâmica USP Prof. Antônio Roque Aula 15
 Ondas (continuação) Ondas propagando-se em uma dimensão Vamos agora estudar propagação de ondas. Vamos considerar o caso simples de ondas transversais propagando-se ao longo da direção x, como o caso de
Ondas (continuação) Ondas propagando-se em uma dimensão Vamos agora estudar propagação de ondas. Vamos considerar o caso simples de ondas transversais propagando-se ao longo da direção x, como o caso de
Exemplos de aceleração Constante 1 D
 Exemplos de aceleração Constante 1 D 1) Dada a equação de movimento de uma partícula em movimento retilíneo, s=-t 3 +3t 2 +2 obtenha: a) A velocidade média entre 1 e 4 segundos; e) A velocidade máxima;
Exemplos de aceleração Constante 1 D 1) Dada a equação de movimento de uma partícula em movimento retilíneo, s=-t 3 +3t 2 +2 obtenha: a) A velocidade média entre 1 e 4 segundos; e) A velocidade máxima;
2. Função polinomial do 2 o grau
 2. Função polinomial do 2 o grau Uma função f: IR IR que associa a cada IR o número y=f()=a 2 +b+c com a,b,c IR e a0 é denominada função polinomial do 2 o grau ou função quadrática. Forma fatorada: a(-r
2. Função polinomial do 2 o grau Uma função f: IR IR que associa a cada IR o número y=f()=a 2 +b+c com a,b,c IR e a0 é denominada função polinomial do 2 o grau ou função quadrática. Forma fatorada: a(-r
Um capacitor é um sistema elétrico formado por dois condutores separados por um material isolante, ou pelo vácuo.
 Capacitores e Dielétricos Um capacitor é um sistema elétrico formado por dois condutores separados por um material isolante, ou pelo vácuo. Imaginemos uma configuração como a de um capacitor em que os
Capacitores e Dielétricos Um capacitor é um sistema elétrico formado por dois condutores separados por um material isolante, ou pelo vácuo. Imaginemos uma configuração como a de um capacitor em que os
Lista 4. 2 de junho de 2014
 Lista 4 2 de junho de 24 Seção 5.. (a) Estime a área do gráfico de f(x) = cos x de x = até x = π/2 usando quatro retângulos aproximantes e extremidades direitas. Esboce os gráficos e os retângulos. Sua
Lista 4 2 de junho de 24 Seção 5.. (a) Estime a área do gráfico de f(x) = cos x de x = até x = π/2 usando quatro retângulos aproximantes e extremidades direitas. Esboce os gráficos e os retângulos. Sua
Intuitivamente, podemos pensar numa superfície no espaço como sendo um objeto bidimensional. Existem outros modos de se representar uma superfície:
 Capítulo 3 Integrais de superfícies 3.1 Superfícies no espaço Definição 3.1 Uma superfície S no espaço é definida como sendo a imagem de uma aplicação contínua r : K R R 3, (u, v) K 7 r (u, v) =(x (u,
Capítulo 3 Integrais de superfícies 3.1 Superfícies no espaço Definição 3.1 Uma superfície S no espaço é definida como sendo a imagem de uma aplicação contínua r : K R R 3, (u, v) K 7 r (u, v) =(x (u,
CAMPOS CONSERVATIVOS NO PLANO
 CAMPOS CONSERVATIVOS NO PLANO Ricardo Bianconi Primeiro Semestre de 2008 Revisado em Fevereiro de 2015 Resumo Relacionamos os conceitos de campos irrotacionais, campos conservativos e forma do domínio
CAMPOS CONSERVATIVOS NO PLANO Ricardo Bianconi Primeiro Semestre de 2008 Revisado em Fevereiro de 2015 Resumo Relacionamos os conceitos de campos irrotacionais, campos conservativos e forma do domínio
Movimento Retilíneo Uniforme (MRU) Equação Horária do MRU
 Equação Horária do MRU") Movimento Retilíneo Uniforme (MRU) velocímetro do automóvel da figura abaixo marca sempre a mesma velocidade. Quando um móvel possui sempre a mesma velocidade e se movimenta sobre uma reta dizemos que
Movimento Retilíneo Uniforme (MRU) velocímetro do automóvel da figura abaixo marca sempre a mesma velocidade. Quando um móvel possui sempre a mesma velocidade e se movimenta sobre uma reta dizemos que
Objetivos: Construção de tabelas e gráficos, escalas especiais para construção de gráficos e ajuste de curvas à dados experimentais.
 7aula Janeiro de 2012 CONSTRUÇÃO DE GRÁFICOS I: Papel Milimetrado Objetivos: Construção de tabelas e gráficos, escalas especiais para construção de gráficos e ajuste de curvas à dados experimentais. 7.1
7aula Janeiro de 2012 CONSTRUÇÃO DE GRÁFICOS I: Papel Milimetrado Objetivos: Construção de tabelas e gráficos, escalas especiais para construção de gráficos e ajuste de curvas à dados experimentais. 7.1
Vestibular1 A melhor ajuda ao vestibulando na Internet Acesse Agora! www.vestibular1.com.br. Cinemática escalar
 Cinemática escalar A cinemática escalar considera apenas o aspecto escalar das grandezas físicas envolvidas. Ex. A grandeza física velocidade não pode ser definida apenas por seu valor numérico e por sua
Cinemática escalar A cinemática escalar considera apenas o aspecto escalar das grandezas físicas envolvidas. Ex. A grandeza física velocidade não pode ser definida apenas por seu valor numérico e por sua
Atividade 4 Movimento circular uniforme.
 Modellus Atividade 4 Movimento circular uniforme. Amarrou-se uma pedra a um fio e pôs-se a rodar com movimento circular uniforme. As equações do movimento, para um sistemas de coordenadas com origem no
Modellus Atividade 4 Movimento circular uniforme. Amarrou-se uma pedra a um fio e pôs-se a rodar com movimento circular uniforme. As equações do movimento, para um sistemas de coordenadas com origem no
Aula 7 Valores Máximo e Mínimo (e Pontos de Sela)
") Aula 7 Valores Máximo e Mínimo (e Pontos de Sela) MA - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
Aula 7 Valores Máximo e Mínimo (e Pontos de Sela) MA - Cálculo II Marcos Eduardo Valle Departamento de Matemática Aplicada Instituto de Matemática, Estatística e Computação Científica Universidade Estadual
A função do primeiro grau
 Módulo 1 Unidade 9 A função do primeiro grau Para início de conversa... Já abordamos anteriormente o conceito de função. Mas, a fim de facilitar e aprofundar o seu entendimento, vamos estudar algumas funções
Módulo 1 Unidade 9 A função do primeiro grau Para início de conversa... Já abordamos anteriormente o conceito de função. Mas, a fim de facilitar e aprofundar o seu entendimento, vamos estudar algumas funções
GRANDEZAS FÍSICAS. Podemos dizer de modo mais usual que grandeza é tudo aquilo que pode variar quantitativamente.
 FÍSIC 1 VETORES GRNDEZS FÍSICS Podemos dizer de modo mais usual que grandeza é tudo aquilo que pode variar quantitativamente. Deste modo, grandezas físicas são as que podem ser medidas. São divididas em
FÍSIC 1 VETORES GRNDEZS FÍSICS Podemos dizer de modo mais usual que grandeza é tudo aquilo que pode variar quantitativamente. Deste modo, grandezas físicas são as que podem ser medidas. São divididas em
UFPR_VESTIBULAR _2004 COMENTÁRIO E RESOLUÇÃO POR PROFA. MARIA ANTONIA GOUVEIA
 UFR_VESTIBULAR _004 COMENTÁRIO E RESOLUÇÃO OR ROFA. MARIA ANTONIA GOUVEIA QUESTÃO Um grupo de estudantes decidiu viajar de ônibus para participar de um encontro nacional. Ao fazerem uma pesquisa de preços,
UFR_VESTIBULAR _004 COMENTÁRIO E RESOLUÇÃO OR ROFA. MARIA ANTONIA GOUVEIA QUESTÃO Um grupo de estudantes decidiu viajar de ônibus para participar de um encontro nacional. Ao fazerem uma pesquisa de preços,
Notas para um curso de Cálculo 1 Duilio T. da Conceição
 Notas para um curso de Cálculo 1 Duilio T. da Conceição 1 2 Sumário 1 WOLFRAM ALPHA 5 1.1 Digitando Fórmulas e Expressões Matemáticas......... 6 1.1.1 Expoentes......................... 6 1.1.2 Multiplicação.......................
Notas para um curso de Cálculo 1 Duilio T. da Conceição 1 2 Sumário 1 WOLFRAM ALPHA 5 1.1 Digitando Fórmulas e Expressões Matemáticas......... 6 1.1.1 Expoentes......................... 6 1.1.2 Multiplicação.......................
Matemática. Resolução das atividades complementares. M20 Geometria Analítica: Circunferência
 Resolução das atividades complementares Matemática M Geometria Analítica: ircunferência p. (Uneb-A) A condição para que a equação 6 m 9 represente uma circunferência é: a), m, ou, m, c) < m < e), m, ou,
Resolução das atividades complementares Matemática M Geometria Analítica: ircunferência p. (Uneb-A) A condição para que a equação 6 m 9 represente uma circunferência é: a), m, ou, m, c) < m < e), m, ou,