Sistemas Microcontrolados
|
|
|
- Maria Benedita Sacramento Fidalgo
- 6 Há anos
- Visualizações:
Transcrição
1 Ciência da Computação Sistemas Microcontrolados Introdução aos Microcontroladores PIC Prof. Sergio F. Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas lógicas que realizam operações matemáticas e lógicas diversas. Os sistemas microprocessados são compostos de dispositivos separados: microprocessador, memória, interface de entrada e saída (compostas por transistores, acopladores ópticos, etc). Mas por que não incluir todos estes dispositivos em um encapsulamento? 2
2 Microcontroladores A união das memórias com os microprocessadores possibilitou o advento dos microcontroladores. Um microcontrolador é um chip que contém praticamente um pequeno computador embutido, de baixo custo, com: núcleo de processamento memórias RAM, ROM e Flash periféricos de E/S conversores de sinais gerador de clock, entre outros. Os microcontroladores devem possuir uma interface com o ambiente externo para que o desenvolvedor de hardware possa realizar operações diversas, como ligar um relé, acender um LED, ler um sensor, etc. 3 Microcontroladores Microcontroladores são dispositivos voltados a sistemas embarcados e aplicações específicas, ao contrário dos μps, destinados a PCs e aplicações de uso geral. Principais razões da integração das memórias aos μcs: redução do número de pinos do encapsulamento. redução dos custos com componentes externos. diminuição das dimensões da montagem. simplificação do circuito de aplicação. Porém, tal integração tem como desvantagem: limitação da complexidade do programa embarcado, devido ao tamanho reduzido da memória nos μcs. 4
3 Microcontroladores O microcontrolador é programável toda a lógica de operação é estruturada na forma de um programa e gravada dentro do componente. Os µcs não possuem, geralmente, um sistema operacional. Os programas rodam diretamente no chip. O software que roda no µc é chamado de firmware. O software é programado em linguagens C ou Assembly na maior parte dos casos. A programação é feita com o uso de ferramentas instaladas em um PC (IDE). Um compilador é usado para compilar programas em C, e são conhecidos como cross-compiler (PC µc). 5 Microcontroladores O microcontrolador é provido internamente de memória de programa, memória de dados, portas de I/O, timers, contadores, comunicação serial, PWMs, conversores analógico-digitais, etc. Toda vez que o microcontrolador for alimentado, o programa interno (firmware) será executado. Atualmente, muitos equipamentos de nosso uso diário (eletrodomésticos, vídeo-players, alarmes, celulares, brinquedos, etc.) utilizam microcontroladores para execução de suas funções básicas. 6



4 Arquitetura Básica de um Microcontrolador 7 Aplicações Típicas Tipicamente, μcs são usados no controle de: periféricos de informática eletrônicos de consumo sistemas de supervisão instrumentação automação robótica 8
; Microchip: PIC, DSPIC. Freescale (Motorola): 68HC, MPC.")


5 Marcas de Microcontroladores Algumas marcas e modelos: ATMEL: ATMEGA, AT91, AT90; Microchip INTEL: MCS51 ou 8051 (vários fabricantes fabricam este modelo, mas a Intel foi a primeira a produzi-lo, em 1977); Microchip: PIC, DSPIC. Freescale (Motorola): 68HC, MPC. Texas Instruments: MSP430, TMS370 9 Os Microcontroladores PIC Os PIC, ou PICmicro, são microcontroladores fabricados pela empresa americana Microchip Technologies. Atualmente, a Microchip é uma das maiores fabricantes mundiais de microcontroladores de 8 bits. Em 2016, a Microchip adquiriu a Atmel (produz µc Atmega do Arduino) por cerca de 4 bilhões de dólares. PIC é uma sigla para Programmable Interface Controller e origina-se no início dos anos 80, quando foi concebido para operar como interface controladora de periféricos. Núcleo composto por uma máquina RISC: as versões mais simples tem apenas 33 instruções. memória segue a arquitetura Havard. 10

.")
6 Arquitetura Havard x Arquitetura Von Neumann Os microcontroladores PIC apresentam uma estrutura interna do tipo Havard, enquanto muitos µc tradicionais (ex: 8051, ATMega) possuem arquitetura de Von-Neumann. A diferença está na forma como os dados e o programa são processados pelo microcontrolador. Arquitetura Von-Neumann existe apenas um barramento interno por onde passam as instruções e os dados. Arquitetura Havard existem dois barramentos internos (um de dados e outro de instruções). Nos µc PIC, o barramento de dados é sempre de 8 bits, e o de instruções pode ser de 12, 14, 16 ou 32 bits, dependendo do modelo do PIC. 11 Arquitetura Havard x Arquitetura Von Neumann Arquitetura Von-Neumann: Arquitetura Havard: 12

7 Os Microcontroladores PIC Família de Microcontroladores PIC: 13 Os Microcontroladores PIC Os Microcontroladores PIC de 8 bits São mais de 300 ucs, reunindo desde os mais simples e pequenos (6 pinos) a dispositivos de alta gama, com maior poder de processamento, periféricos e interfaces, chegando a 100 pinos. Dividem-se em 4 categorias, de acordo com a complexidade da aplicação a que se destinam: Baseline Mid-Range Enhanced Mid-Range PIC18 14
.")
8 Os Microcontroladores PIC PIC 8-bits: Memória de Programa vs N de Pinos 15 Estrutura Interna PIC16F628A ULA diretamente ligada ao registrador W. Memória de programa. Memória de dados (RAM). Portas com todos os seus pinos de I/O. Os periféricos, tais como: EEPROM, timers, comparador interno, módulo CCP e a porta serial. O registrador de status. O contador de programa (PC). Circuitos internos de reset, osciladores, Watchdog Timer (WDT), Power-up e Brown-out internos. 16

9 Pinagem do PIC16F628A O PIC16F628A possui 18 pinos divididos em terminais de alimentação, de reset, de conexão com o oscilador e os terminais de portas e periféricos. Como o µc possui diversas características e um pequeno número de terminais, muitos terminais possuem mais de uma função. 17 Funções dos Pinos 18

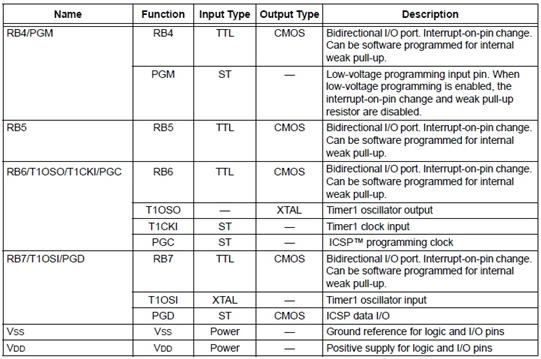
10 Funções dos Pinos 19 Funções dos Pinos 20
 memória EEPROM: 128 bytes (128 x 8) comunicação serial: USART 10 fontes de interrupção 3 timers (2 x 8 bits, 1 x 16 bits) 2 comparadores analógicos 1 módulo CCP (capture, compare,")
11 O PIC16F628A O PIC16F628A apresenta as seguintes características: 18 pinos no total, sendo 16 de I/O frequência máxima de operação: 20MHz memória de programa: 2k words (2048 x 14) memória de dados: 224 bytes (224 x 8) memória EEPROM: 128 bytes (128 x 8) comunicação serial: USART 10 fontes de interrupção 3 timers (2 x 8 bits, 1 x 16 bits) 2 comparadores analógicos 1 módulo CCP (capture, compare, PWM) 35 instruções de máquina 21 Ciclos de Máquina Nos µc PIC, o sinal de clock é internamente dividido por 4. Para um clock externo de 4MHz, temos um ciclo interno de 1 MHz e, portanto, cada ciclo de máquina dura 1 µs. A divisão do clock por 4 forma as fases Q1, Q2, Q3 e Q4. Basicamente Q1 envolve a busca de instrução, Q2 a decodificação de instrução, Q3 a execução de instrução e Q4 a escrita do resultado. Esse processamento por fases é conhecido como execução em pipeline. Isso permite que todas as instruções sejam executadas em apenas um ciclo (gasta 1us para um clock de 4MHz) e torna o sistema muito mais rápido. 22
12 Ciclos de Máquina O diagrama seguinte foi retirado do datasheet do µc, e demonstra, claramente, as divisões dos ciclos nas quatro fases (Q1 a Q4) e o conceito de pipeline. 23 Osciladores Os microcontroladores PIC possuem alguns modos de osciladores disponíveis para operação. Tipos de osciladores: RC RC externo (uso de resistor e capacitor) INTOSC RC interno EC fonte de clock externa HS cristal/ressonador de alta frequência (acima de 4MHz) XT cristal/ressonador de média frequência LP cristal/ressonador de baixa frequência (32kHz) 24
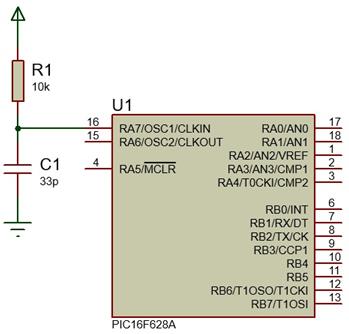

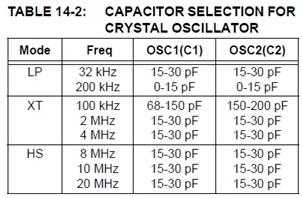
13 Osciladores RC Externo 25 Osciladores Cristal 26
14 Organização de Memória São divididas em três tipos: ROM Memória de Programa RAM Memória de Dados EEPROM Memória de Armazenamento Por ser um microcontrolador de arquitetura Havard, o PIC16F628A tem suas memórias de programa e de dados mapeadas separadamente. Este microcontrolador possui ainda uma terceira memória: a memória não-volátil EEPROM. EEPROM são memórias não-voláteis, ou seja, não apagam seu conteúdo quando retira-se a alimentação. 27 Memória de Programa A memória de programa presente no PIC16F628A é do tipo FLASH (sufixo F ) que permite ser gravada/apagada mais de 1000 vezes. No PIC16F628A há o registrador PC (Program Counter) de 13 bits capaz de endereçar um espaço de memória de programa de 2k x 14. Vetor de reset corresponde ao primeiro endereço da memória de programa que será executado quando o PIC começar a rodar. Geralmente o reset aponta para o endereço 0x0000. Vetor de interrupção as rotinas de interrupção serão armazenadas na área de programação. Há um endereço reservado para o início das RTIs (0x0004). 28

15 Memória de Programa 29 Memória de Dados É uma memória do tipo RAM usada para armazenar todas as variáveis e registradores de forma temporária durante a execução do programa. Essa memória armazena dados de 8 bits e é volátil, ou seja, quando o PIC é desligado, ela é automaticamente perdida. No PIC16F628A, essa memória é de 224 bytes. A memória de dados pode ser lida/escrita em tempo de execução do programa através de diversas instruções. A memória de dados é dividida em quatro bancos contendo os registradores de propósito geral (GPRs, em inglês) e os registradores de função específica (SFRs, em inglês). 30


16 Memória de Dados 31 Obs: posteriormente voltaremos a estudar memória de dados, mais particularmente sobre os SFRs (registradores de função específica). E veremos como ativar/desativar certas funções do µc alterando os valores dos SFRs (fazer configuração via software). 32
17 Memória EEPROM A EEPROM é uma memória não-volátil que consegue manter as informações mesmo sem alimentação. É usada para armazenar valores que não podem ser perdidos. É escrita e apagada eletricamente. Se necessário, pode ser usada uma EEPROM externa. No PIC16F628A, a EEPROM tem o tamanho de 128 bytes. 33 Configurações do PIC Alguns recursos do PIC podem ser configurados para aplicações específicas. Dependendo do compilador usado para programar o PIC, estas configurações podem ser feitas direto no programa ou podem ser feitas em uma janela Settings do próprio compilador. Algumas destas configurações são: master clear(mclr) watchdog timer brown out detect power up timer low voltage program código de proteção 34
. resistor de pull-up 35 Watchdog Timer Watchdog significa cão de guarda.")
18 Master Clear (MCLR) Trata-se de um reset externo. É ativo em nível baixo, ou seja, quando aplicado um nível baixo no pino, ocorre o reinício do programa. No PIC16F628A, o MCLR pode ser ativo, ou não, via software. No PIC16F628A, o MCLR está no RA5 (pino 4). resistor de pull-up 35 Watchdog Timer Watchdog significa cão de guarda. Watchdog Timer é um contador de 8 bits utilizado para verificar se o programa travou. Sua função é reiniciar (reset) o microcontrolador quando ocorre overflow da contagem. Uma vez o WDT ativado, o programa deve estar preparado para limpar o contador do WDT periodicamente. caso contrário, o programa será resetado toda vez que esse contador estourar. 36
19 Brown Out Detect É um sistema de detecção automática de baixa tensão de alimentação. Tensões configuráveis: 4V ou 2.1V. Caso a tensão de alimentação caia abaixo do valor configurado por mais de 100µs, ocorrerá um reset no software (sistema será reiniciado). 37 Power Up Timer Circuito interno que retarda o início da execução do programa. Garante estabilização da tensão de alimentação. Esta opção irá fazer com que o PIC só comece a operar cerca de 72ms após o pino MCLR ser colocado em nível alto. 38
20 Low Voltage Program Trata-se do sistema de programação do PIC (gravação de memória de programa) em baixa tensão: 5V. Normalmente, essa programação é habilitada por uma alta tensão (13V) no pino MCLR. Com isso, por meio de baixa tensão, é possível criarmos sistemas onde um PIC possa gravar o programa de outro PIC. 39 Código de Proteção Para a gravação em série, é muito importante que essa opção esteja ativada, pois isso impedirá que qualquer pessoa consiga ler o programa gravado dentro do PIC. Essa é a única proteção que você terá para que ninguém possa copiar o seu sistema. Essa opção impedirá que você leia a memória mas não impedirá que você grave outro programa por cima. 40
21 Interrupções Uma interrupção serve para interromper o programa imediatamente. As interrupções são ações tratadas diretamente pelo hardware, o que as torna muito rápidas e disponíveis em qualquer ponto do sistema. Quando uma interrupção acontece: o programa é paralisado. o programa guarda, na pilha, o endereço da próxima instrução. ocorre o desvio para um endereço fixo da memória de programa. neste endereço (0x04 no PIC16F628A) uma função específica (definida pelo programador) é executada. e depois o programa continua a ser executado no mesmo ponto em que estava. 41 Interrupções no PIC Existem modelos de PIC que nem possuem interrupções (ex: 12C50X, 16C54). Mas na maioria dos modelos de PIC, as interrupções estão presentes (em maior ou menor número). O PIC16F628A possui 10 tipos de interrupções: 3 relacionadas a timers externa mudança de estado fim de escrita na EEPROM de USART (2) de Comparador e de CCP Veremos agora detalhes de algumas destas interrupções. 42
22 Interrupções pelos Timers Os timers são registradores que atuam como contadores ou temporizadores. Há três timers no PIC16F628A: timer 0, timer 1 e timer 2. As interrupções pelo timer acontecem sempre que um dos contadores de tempo interno, denominados TMR0 (Timer 0), TMR1 (Timer 1) e TMR2 (Timer 2), estouram. No caso do TMR0, como ele é um registrador de 8 bits, o estouro ocorre sempre que ele passar de 0xFF para 0x00. No caso do TMR1 (registrador de 16 bits), o estouro ocorre sempre que ele passar de 0xFFFF para 0x Interrupções pelos Timers Já para o TMR2, que é também um registrador de 8 bits, a interrupção não acontece necessariamente quando ele estoura o limite de 0xFF, e sim quando ele atinge um valor especificado em outro registrador especial chamado PR2. A interrupção pelo timer é utilizada normalmente para a contagem de tempo. O TMR0 e TMR1 podem ser incrementados internamente tanto pelo clock da máquina como também por um sinal externo. ao usar um sinal externo, os timers passam a ser contadores de pulsos, podendo ser utilizados para outras finalidades. 44
23 Interrupções pelos Timers Tempo de estouro do timer corresponde ao tempo que o processador leva para ativar uma interrupção pelo timer. Cálculo do tempo de estouro: para o Timer0: TE = (2 8 TMR0) * Prescale * ciclo_de_maquina para o Timer1: TE = (2 16 (TMR1H:TMR1L)) * Prescale * ciclo_maquina para o Timer2: TE = PR2 * Prescale * Postscale * ciclo_de_maquina Obs: TMR0, TMR1H, TMR1L e PR2 são registradores de 8 bits. 45 Interrupção Externa Essa interrupção é gerada por um sinal externo ligado a uma porta específica do PIC, que no caso é o bit RB0 (pino 6), desde que esteja configurada como entrada. A interrupção externa é utilizada para diversas finalidades: comunicação entre microcontroladores, garantindo o sincronismo. reconhecimento de um botão ou outro sinal do sistema que necessite de uma ação imediata. A interrupção externa pode ser configurada para ocorrer na borda de subida ou na borda de descida do pulso. Flag de sinalização da interrupção externa: INTF. Controle de habilitação: INTE. Estas duas flags são encontradas no registrador INTCON. 46
24 Interrupção por Mudança de Estado Diferentemente da interrupção externa, a interrupção por mudança de estado ocorre tanto na borda de descida como na borda de subida. Essa interrupção, por sua vez, está ligada ao nibble mais significativo da porta B, ou seja, RB4, RB5, RB6 e RB7 simultaneamente. Por isso, se esses pinos forem configurados como entrada, a mudança de estado em qualquer um deles irá gerar a interrupção. Esse tipo de interrupção pode ser utilizado para verificação de uma rede de sensores conectada a esses pinos. Flag sinalizador desta interrupção: RBIF. Habilitação: RBIE. 47 Interrupção de Fim de Escrita na EEPROM Como foi visto anteriormente, alguns PICs possuem uma memória EEPROM interna. Essa interrupção serve para detectarmos o final de uma rotina de escrita nessa memória. A utilização da interrupção não é obrigatória para que a escrita funcione, mas, como a EEPROM é lenta na hora de escrever, em alguns sistemas sua utilização pode ser necessária para evitar uma parada durante a escrita na EEPROM. 48
25 Interrupção de Comparador Uma vez que o PIC16F628A possui dois comparadores internos, estes poderão ser utilizados de forma totalmente independente do programa, ou de forma mista. No último caso, o resultado da comparação poderá ser analisado pelo programa para a tomada de decisões. Para facilitar ainda mais esta função, a interrupção do comparador pode ser utilizada para avisar o sistema sempre que houve uma mudança de estado na resposta da comparação. 49 Interrupções de USART USART significa Universal Synchronous Asynchronous Receiver Transmitter. O PIC16F628A possui um sistema completo (via hardware) para comunicação serial do tipo USART, por meio do protocolo RS-232. Este sistema facilita todo o processamento para entrada e saída de dados seriais. Este sistema possui duas interrupções para informar o programa quando um dado foi recebido e quando a transmissão de outro dado já foi terminada. 50
26 Interrupção de CCP O módulo CCP (Capture, Compare e PWM) possui uma interrupção para informar ao programa uma das duas situações possíveis: fim da captura (Capture) fim da comparação (Compare) O modo Capture pode ser utilizado para contar o tempo (TMR1) entre duas mudanças de estado de uma entrada específica (T1CKI). com isso podemos implementar, por exemplo, um periodímetro. Já como Compare, podemos comparar o valor de TMR1 com o especificado em outro registrador especial (CCPR1). desta forma podemos monitorar a quantidade de pulsos na entrada relacionada ao TMR1 (T1CKI). 51
Laboratório de Hardware
 Ciência da Computação Laboratório de Hardware Introdução ao Microcontrolador PIC Prof. Sergio Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas lógicas
Ciência da Computação Laboratório de Hardware Introdução ao Microcontrolador PIC Prof. Sergio Ribeiro Microprocessadores Os microprocessadores são circuitos integrados compostos por diversas portas lógicas
INTRODUÇÃO: MICROCONTROLADORES
 INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
INTRODUÇÃO: MICROCONTROLADORES MICROCONTROLADOR X MICROPROCESSADOR Baixa capacidade de processamento Freq. Operação em MHz Custo de R$ 7,00 a 30,00 Aplicações mais restrita Alta capacidade de processamento
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Microcontroladores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Sistemas Embarcados
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Microcontroladores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Sistemas Embarcados
FACULDADE LEÃO SAMPAIO
 FACULDADE LEÃO SAMPAIO Microcontroladores Curso de Análise e Desenvolvimento de Sistemas 1 Componentes CPU Memórias Dispositivos de Entrada/Saída (E/S) Input/Output (I/O) 2 CPU A CPU busca informações
FACULDADE LEÃO SAMPAIO Microcontroladores Curso de Análise e Desenvolvimento de Sistemas 1 Componentes CPU Memórias Dispositivos de Entrada/Saída (E/S) Input/Output (I/O) 2 CPU A CPU busca informações
Aula 10 Microcontrolador Intel 8051 Parte 1
 Aula 10 Microcontrolador Intel 8051 Parte 1 SEL 0415 INTROD. À ORGANIZAÇÃO DE COMPUTADORES Prof. Dr. Marcelo A. C. Vieira SEL 0415 Microcontroladores Grupo de Sistemas Digitais n Microcontrolador é o nome
Aula 10 Microcontrolador Intel 8051 Parte 1 SEL 0415 INTROD. À ORGANIZAÇÃO DE COMPUTADORES Prof. Dr. Marcelo A. C. Vieira SEL 0415 Microcontroladores Grupo de Sistemas Digitais n Microcontrolador é o nome
Introdução aos microcontroladores Microcontroladores e microprocessadores Tecnologia em Manutenção Industrial
 Introdução aos microcontroladores Microcontroladores e microprocessadores Tecnologia em Manutenção Industrial 1 Definição de microcontroladores É um circuito integrado que pode ser programado para realização
Introdução aos microcontroladores Microcontroladores e microprocessadores Tecnologia em Manutenção Industrial 1 Definição de microcontroladores É um circuito integrado que pode ser programado para realização
1.2 Registradores relacionados as Interrupções. 3. TOSE Sentido da transição da borda do sinal aplicado am TMR0
 Capítulo 1 Interrupções 1.1 O que são interrupções? Como o nome sugere interrompe a execução normal e exige atenção urgente da CPU. São eventos não previsíveis e assim não pode ser oferecido tempo de CPU
Capítulo 1 Interrupções 1.1 O que são interrupções? Como o nome sugere interrompe a execução normal e exige atenção urgente da CPU. São eventos não previsíveis e assim não pode ser oferecido tempo de CPU
Jadsonlee da Silva Sá
 Introdução aos Sistemas Microcontrolados Jadsonlee da Silva Sá Jadsonlee.sa@univasf.edu.br www.univasf.edu.br/~jadsonlee.sa Introdução aos Sistemas Microcontrolados Assembly, C, java,... Circuito Reset
Introdução aos Sistemas Microcontrolados Jadsonlee da Silva Sá Jadsonlee.sa@univasf.edu.br www.univasf.edu.br/~jadsonlee.sa Introdução aos Sistemas Microcontrolados Assembly, C, java,... Circuito Reset
Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP. Memórias de Dados e de Programa
 4. Memórias de Dados e de Programa Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP 4.1 Memórias Semicondutoras Algumas definições Célula: Dispositivo de armazenamento de 1 bit. Palavra:
4. Memórias de Dados e de Programa Professor: Vlademir de Oliveira Disciplina: Microcontroladores e DSP 4.1 Memórias Semicondutoras Algumas definições Célula: Dispositivo de armazenamento de 1 bit. Palavra:
MSP430 - Arquitertura
 Curso Técnico de Nível Médio Integrado Eletrônica - 8o Período Disciplina de Microcontroladores 2 (EL08D) Professor Gabriel Kovalhuk Email: kovalhuk@utfpr.edu.br Página pessoal: http://paginapessoal.utfpr.edu.br/kovalhuk
Curso Técnico de Nível Médio Integrado Eletrônica - 8o Período Disciplina de Microcontroladores 2 (EL08D) Professor Gabriel Kovalhuk Email: kovalhuk@utfpr.edu.br Página pessoal: http://paginapessoal.utfpr.edu.br/kovalhuk
Período Saulo O. D. Luiz
 Sistemas Microcontrolados Período 2009.2 Aula 2 1 Saulo O. D. Luiz Roteiro Características de um Microcontrolador 2 Saulo O. D. Luiz Características de um Microcontrolador Microcontrolador de fabricantes
Sistemas Microcontrolados Período 2009.2 Aula 2 1 Saulo O. D. Luiz Roteiro Características de um Microcontrolador 2 Saulo O. D. Luiz Características de um Microcontrolador Microcontrolador de fabricantes
14/3/2016. Prof. Evandro L. L. Rodrigues
 SEL 433 APLICAÇÕES DE MICROPROCESSADORES I SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Prof. Evandro L. L. Rodrigues Tópicos do curso Conceitos básicos - Aplicações e utilizações dos microcontroladores
SEL 433 APLICAÇÕES DE MICROPROCESSADORES I SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Prof. Evandro L. L. Rodrigues Tópicos do curso Conceitos básicos - Aplicações e utilizações dos microcontroladores
Aplicações Avançadas de Microprocessadores. Professor: Marco Shawn Meireles Machado
 Aplicações Avançadas de Microprocessadores Professor: Marco Shawn Meireles Machado Iniciação aos sistemas microcontrolados Objetivos da Aula: Descrever os itens que compõem uma CPU; Detalhar a estrutura
Aplicações Avançadas de Microprocessadores Professor: Marco Shawn Meireles Machado Iniciação aos sistemas microcontrolados Objetivos da Aula: Descrever os itens que compõem uma CPU; Detalhar a estrutura
Microcontroladores: Programação em C
 Aula 06 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 02/04/2013 1 Microcontroladores PIC São fabricados pela Microchip Technology. PIC significa Programmabile Intelligent Computer, ou
Aula 06 Microcontroladores: Programação em C Prof. Tecgº Flávio Murilo 02/04/2013 1 Microcontroladores PIC São fabricados pela Microchip Technology. PIC significa Programmabile Intelligent Computer, ou
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I
 SEL 433 APLICAÇÕES DE MICROPROCESSADORES I SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Apresentação do curso Critério de avaliação Média final = 0.8 * MP + 0.2 * ME onde MP = (P1 + P2) / 2 e ME = Notas
SEL 433 APLICAÇÕES DE MICROPROCESSADORES I SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Apresentação do curso Critério de avaliação Média final = 0.8 * MP + 0.2 * ME onde MP = (P1 + P2) / 2 e ME = Notas
ARDUINO. Profº. Engº. Robson Dias Ramalho
 ARDUINO Profº. Engº. Robson Dias Ramalho 3. Microprocessador (E/S) 4. Memória RAM (E/S) 5. Placa de vídeo (E/S) 8. Disco Rígido (E/S) 9. Mouse (Saída) 10. Teclado (E/S) 2. Placa mãe (barramento de dados)
ARDUINO Profº. Engº. Robson Dias Ramalho 3. Microprocessador (E/S) 4. Memória RAM (E/S) 5. Placa de vídeo (E/S) 8. Disco Rígido (E/S) 9. Mouse (Saída) 10. Teclado (E/S) 2. Placa mãe (barramento de dados)
Microcontroladores PIC
 Microcontroladores PIC Prof. Adilson Gonzaga 1 Arquitetura de Microcomputadores Arquitetura von Neumann: Há apenas um barramento (duto) de dados e um de endereço. As Instruções e os dados ocupam o mesmo
Microcontroladores PIC Prof. Adilson Gonzaga 1 Arquitetura de Microcomputadores Arquitetura von Neumann: Há apenas um barramento (duto) de dados e um de endereço. As Instruções e os dados ocupam o mesmo
SISTEMAS MICROCONTROLADOS
 SISTEMAS MICROCONTROLADOS UTFPR Código: EL54E Turma: N11/E11 Prof. Sérgio Moribe Colaboração: Prof. Heitor S. Lopes Prof. Rubens Alexandre de Faria Email: smoribe@utfpr.edu.br Site: pessoal.utfpr.edu.br/smoribe
SISTEMAS MICROCONTROLADOS UTFPR Código: EL54E Turma: N11/E11 Prof. Sérgio Moribe Colaboração: Prof. Heitor S. Lopes Prof. Rubens Alexandre de Faria Email: smoribe@utfpr.edu.br Site: pessoal.utfpr.edu.br/smoribe
Estrutura Básica de um Computador
 SEL-0415 Introdução à Organização de Computadores Estrutura Básica de um Computador Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira INTRODUÇÃO n Organização Æ implementação do hardware, componentes, construção
SEL-0415 Introdução à Organização de Computadores Estrutura Básica de um Computador Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira INTRODUÇÃO n Organização Æ implementação do hardware, componentes, construção
Objetivos MICROCONTROLADORES HARDWARE. Microcontroladores I. Prof. Mauricio. Micro-I Prof. Mauricio 1. Microcontroladores PIC. Requisitos de Hardware
 MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Microcontroladores I Objetivos 2 Microcontroladores PIC Famílias PIC PIC 16F877A Tipos de Encapsulamentos Requisitos de Hardware Prof. Mauricio 1 Microcontroladores
MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Microcontroladores I Objetivos 2 Microcontroladores PIC Famílias PIC PIC 16F877A Tipos de Encapsulamentos Requisitos de Hardware Prof. Mauricio 1 Microcontroladores
Programa Trainee 2012 Módulo 4 Microcontroladores AVR
 Programa Trainee 2012 Módulo 4 Microcontroladores AVR Conteúdo 01 Arquitetura de microcontroladores AVR Mayara de Sousa Prof. Leandro Schwarz Tempo Estimado 2 h.a. Projeto de Placas de Circuito Impresso
Programa Trainee 2012 Módulo 4 Microcontroladores AVR Conteúdo 01 Arquitetura de microcontroladores AVR Mayara de Sousa Prof. Leandro Schwarz Tempo Estimado 2 h.a. Projeto de Placas de Circuito Impresso
Conjunto de Instruções e Modelos de Arquiteturas
 Departamento de Engenharia Elétrica e de Computação EESC-USP SEL-0415 Introdução à Organização de Computadores Conjunto de Instruções e Modelos de Arquiteturas Aula 7 Prof. Marcelo Andrade da Costa Vieira
Departamento de Engenharia Elétrica e de Computação EESC-USP SEL-0415 Introdução à Organização de Computadores Conjunto de Instruções e Modelos de Arquiteturas Aula 7 Prof. Marcelo Andrade da Costa Vieira
Microprocessadores. São máquinas elétricas onde podemos armazenar instruções lógicas, aritméticas e de tomada de decisão;
 Microprocessadores São máquinas elétricas onde podemos armazenar instruções lógicas, aritméticas e de tomada de decisão; CPU (Central Processing Unit Unidade Central de Processamento) CPU (Central Processing
Microprocessadores São máquinas elétricas onde podemos armazenar instruções lógicas, aritméticas e de tomada de decisão; CPU (Central Processing Unit Unidade Central de Processamento) CPU (Central Processing
Microcontroladores. Prof. Nivaldo T. Schiefler Jr. M.Eng Homepage: www.joinville.ifsc.edu.br/~nivaldo Email: nivaldo@ifsc.edu.br
 Prof. Nivaldo T. Schiefler Jr. M.Eng Homepage: www.joinville.ifsc.edu.br/~nivaldo Email: nivaldo@ifsc.edu.br Conceito final será constituído de duas avaliações: 1ª Conceito avaliação teórica 2ª Conceito
Prof. Nivaldo T. Schiefler Jr. M.Eng Homepage: www.joinville.ifsc.edu.br/~nivaldo Email: nivaldo@ifsc.edu.br Conceito final será constituído de duas avaliações: 1ª Conceito avaliação teórica 2ª Conceito
Microcontrolador 8051:
 Microcontrolador 8051: Fonte: CORRADI 2009 O Microcontrolador 8051: Começou a ser produzido no início da década de 80, pela Intel; Hoje é fabricado por várias empresas e com muitas variações; Atualmente,
Microcontrolador 8051: Fonte: CORRADI 2009 O Microcontrolador 8051: Começou a ser produzido no início da década de 80, pela Intel; Hoje é fabricado por várias empresas e com muitas variações; Atualmente,
Palestra de Tecnologia. Assunto: Microcontroladores.
 Palestra de Tecnologia Assunto: Microcontroladores www.cerne-tec.com.br Apresentação Apresentação Vitor Amadeu Souza vitor@cerne-tec.com.br Cerne Tecnologia: Localização: Rio de Janeiro Áreas de atuação:
Palestra de Tecnologia Assunto: Microcontroladores www.cerne-tec.com.br Apresentação Apresentação Vitor Amadeu Souza vitor@cerne-tec.com.br Cerne Tecnologia: Localização: Rio de Janeiro Áreas de atuação:
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Interfaces de Entradas e Saídas DCA0119 Sistemas Digitais Heitor Medeiros Florencio
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Interfaces de Entradas e Saídas DCA0119 Sistemas Digitais Heitor Medeiros Florencio
Prof. Adilson Gonzaga
 Prof. Adilson Gonzaga Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos Xtal1 e Xtal2 da CPU.
Prof. Adilson Gonzaga Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos Xtal1 e Xtal2 da CPU.
Projeto de Sistemas Eletrônicos
 Curso de Formação Profissional Técnico em Eletroeletrônica Módulo II Senai Arcos-MG Projeto de Sistemas Eletrônicos Raphael Roberto Ribeiro Silva Técnico em eletroeletrônica pelo INPA Arcos Estudante de
Curso de Formação Profissional Técnico em Eletroeletrônica Módulo II Senai Arcos-MG Projeto de Sistemas Eletrônicos Raphael Roberto Ribeiro Silva Técnico em eletroeletrônica pelo INPA Arcos Estudante de
Microcontrolador 8051
 Microcontrolador 8051 Inicialmente fabricado pela INTEL, atualmente fabricado por várias empresas; Possui uma grande variedade de dispositivos, com diversas características, porém compatíveis em software;
Microcontrolador 8051 Inicialmente fabricado pela INTEL, atualmente fabricado por várias empresas; Possui uma grande variedade de dispositivos, com diversas características, porém compatíveis em software;
LABORATÓRIO DE ARQUITETURA DE COMPUTADORES PREPARAÇÃO 03: INTERRUPÇÕES
 AEVSF Autarquia Educacional do Vale do São Francisco FACAPE Faculdade de Ciências Aplicadas e Sociais de Petrolina Curso de Ciência da Computação LABORATÓRIO DE ARQUITETURA DE COMPUTADORES Prof. Sérgio
AEVSF Autarquia Educacional do Vale do São Francisco FACAPE Faculdade de Ciências Aplicadas e Sociais de Petrolina Curso de Ciência da Computação LABORATÓRIO DE ARQUITETURA DE COMPUTADORES Prof. Sérgio
Objetivos MICROCONTROLADORES HARDWARE. Aula 03: Periféricos. Prof. Mauricio. MICRO I Prof. Mauricio 1. Arquitetura de um Microcontrolador
 MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Aula 03: Objetivos 2 Arquitetura de um Microcontrolador Unidade Central de Processamento Portas de Entrada e Saída Porta Serial Temporizador / Contador Conversor
MICROCONTROLADORES HARDWARE 1 Prof. Mauricio Aula 03: Objetivos 2 Arquitetura de um Microcontrolador Unidade Central de Processamento Portas de Entrada e Saída Porta Serial Temporizador / Contador Conversor
Microprocessadores e Microcontroladores. Professor Lucas Araujo do Nascimento
 Microprocessadores e Microcontroladores Professor Lucas Araujo do Nascimento REVISÃO Microprocessadores e Microcontroladores Microprocessadores e Microcontroladores COMPUTADOR Microprocessadores e Microcontroladores
Microprocessadores e Microcontroladores Professor Lucas Araujo do Nascimento REVISÃO Microprocessadores e Microcontroladores Microprocessadores e Microcontroladores COMPUTADOR Microprocessadores e Microcontroladores
SEL-0415 Introdução à Organização de Computadores Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira
 SEL-0415 Introdução à Organização de Computadores Conceitos Básicos Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira INTRODUÇÃO n Organização Æ implementação do hardware, componentes, construção dos dispositivos
SEL-0415 Introdução à Organização de Computadores Conceitos Básicos Aula 2 Prof. Dr. Marcelo Andrade da Costa Vieira INTRODUÇÃO n Organização Æ implementação do hardware, componentes, construção dos dispositivos
Circuito Eletrônico. Entendendo o circuito eletrônico na robótica. domingo, 28 de agosto de 11
 Circuito Eletrônico Entendendo o circuito eletrônico na robótica Circuito Integrado Um circuito integrado híbrido é um circuito eletrônico miniaturizado constituído de dispositivos semicondutores individuais,
Circuito Eletrônico Entendendo o circuito eletrônico na robótica Circuito Integrado Um circuito integrado híbrido é um circuito eletrônico miniaturizado constituído de dispositivos semicondutores individuais,
1.1 Noções básicas sobre interrupções em Microcontroladores
 Capítulo 1 Interrupções 1.1 Noções básicas sobre interrupções em Microcontroladores PIC Interrupções é obrigação em uma programação profissional. Quando um evento ocorrer, uma bandeira de interrupção será
Capítulo 1 Interrupções 1.1 Noções básicas sobre interrupções em Microcontroladores PIC Interrupções é obrigação em uma programação profissional. Quando um evento ocorrer, uma bandeira de interrupção será
Interrupção. Prof. Adilson Gonzaga
 Interrupção Prof. Adilson Gonzaga Estrutura de Programação Assembly Programa Principal Chamada de Sub-rotina1 Programa Principal Chamada de Sub-rotina2 Sub-rotina1 Subrotina2 Programa Principal Chamada
Interrupção Prof. Adilson Gonzaga Estrutura de Programação Assembly Programa Principal Chamada de Sub-rotina1 Programa Principal Chamada de Sub-rotina2 Sub-rotina1 Subrotina2 Programa Principal Chamada
Sistemas Microcontrolados
 Ciência da Computação Sistemas Microcontrolados Função dos Registradores no PIC Prof. Sergio F. Ribeiro Os Registradores Especiais que Controlam Tudo Vimos que configurações podem ser feitas para definir
Ciência da Computação Sistemas Microcontrolados Função dos Registradores no PIC Prof. Sergio F. Ribeiro Os Registradores Especiais que Controlam Tudo Vimos que configurações podem ser feitas para definir
Introdução ao Microcontrolador PIC
 Introdução ao Microcontrolador PIC Nikolas Libert Aula 11 Eletrônica Digital ET52C Tecnologia em Automação Industrial Memórias Memórias Memória de dados Núcleo do μc Memória de código Normalmente os microcontroladores
Introdução ao Microcontrolador PIC Nikolas Libert Aula 11 Eletrônica Digital ET52C Tecnologia em Automação Industrial Memórias Memórias Memória de dados Núcleo do μc Memória de código Normalmente os microcontroladores
Família de Microcontroladores AVR
 www.iesa.com.br 1 AVR é o nome dado a uma linha ou família de microcontroladores fabricada pela empresa Atmel nos Estados Unidos. A sigla AVR é em homenagem a dois estudantes de doutorado de uma universidade
www.iesa.com.br 1 AVR é o nome dado a uma linha ou família de microcontroladores fabricada pela empresa Atmel nos Estados Unidos. A sigla AVR é em homenagem a dois estudantes de doutorado de uma universidade
Arquitetura do Disciplina de Microcontroladores. Prof. Ronnier Prof. Rubão
 Arquitetura do 8051 Disciplina de Microcontroladores Prof. Ronnier Prof. Rubão Objetivo fim Entender as noções básicas de microprocessadores, microcontroladores e sistemas embarcados Estudar a arquitetura
Arquitetura do 8051 Disciplina de Microcontroladores Prof. Ronnier Prof. Rubão Objetivo fim Entender as noções básicas de microprocessadores, microcontroladores e sistemas embarcados Estudar a arquitetura
07/06/2015. Outras características importantes em Microprocessadores/Microcontroladores SEL-433 APLICAÇÕES DE MICROPROCESSADORES I
 SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos de controle de redução de potência de operação do chip.
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos de controle de redução de potência de operação do chip.
Introdução à Organização de Computadores. Aula 8
 SEL-0415 Introdução à Organização de Computadores Set de Instruções Modelos de Arquiteturas Aula 8 Prof. Dr. Marcelo Andrade da Costa Vieira INSTRUÇÕES n Padrão de código binário armazenado em um dispositivo
SEL-0415 Introdução à Organização de Computadores Set de Instruções Modelos de Arquiteturas Aula 8 Prof. Dr. Marcelo Andrade da Costa Vieira INSTRUÇÕES n Padrão de código binário armazenado em um dispositivo
Conjunto de Instruções e Modelos de Arquiteturas
 Departamento de Engenharia Elétrica e de Computação EESC-USP SEL-0415 Introdução à Organização de Computadores Conjunto de Instruções e Modelos de Arquiteturas Aula 7 Prof. Marcelo Andrade da Costa Vieira
Departamento de Engenharia Elétrica e de Computação EESC-USP SEL-0415 Introdução à Organização de Computadores Conjunto de Instruções e Modelos de Arquiteturas Aula 7 Prof. Marcelo Andrade da Costa Vieira
Arquitetura do Microcontrolador Atmega 328
 Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Arquitetura do Microcontrolador Atmega
Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Arquitetura do Microcontrolador Atmega
SEL0338 Tópicos Especiais em Sistemas Digitais
 1 Formato das Instruções Instruções Orientadas a Byte: instrução f,d Designador do Registrador do arquivo (endereço Hexa ou Label) a ser usado pela instrução Exemplo: MOVF f,d ; move o conteúdo do registrador
1 Formato das Instruções Instruções Orientadas a Byte: instrução f,d Designador do Registrador do arquivo (endereço Hexa ou Label) a ser usado pela instrução Exemplo: MOVF f,d ; move o conteúdo do registrador
Microcontroladores PIC16 - XM 116 -
 T e c n o l o g i a Microcontroladores PIC16 - XM 116 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC16 - XM 116 - INTRODUÇÃO O mundo da
T e c n o l o g i a Microcontroladores PIC16 - XM 116 - Os melhores e mais modernos MÓDULOS DIDÁTICOS para um ensino tecnológico de qualidade. Microcontroladores PIC16 - XM 116 - INTRODUÇÃO O mundo da
Projeto de Sistemas Embarcados
 Projeto de Sistemas Embarcados Pós-Graduação em Engenharia Elétrica Prof. Dr. Joselito A. Heerdt Joselito.heerdt@.udesc.br PLANEJAMENTO 1. Introdução 2. O projeto de sistemas 3. Projeto de hardware 4.
Projeto de Sistemas Embarcados Pós-Graduação em Engenharia Elétrica Prof. Dr. Joselito A. Heerdt Joselito.heerdt@.udesc.br PLANEJAMENTO 1. Introdução 2. O projeto de sistemas 3. Projeto de hardware 4.
Algoritmos Computacionais
 UNIDADE 1 Processador e instruções Memórias Dispositivos de Entrada e Saída Software ARQUITETURA BÁSICA UCP Unidade central de processamento MEM Memória E/S Dispositivos de entrada e saída UCP UNIDADE
UNIDADE 1 Processador e instruções Memórias Dispositivos de Entrada e Saída Software ARQUITETURA BÁSICA UCP Unidade central de processamento MEM Memória E/S Dispositivos de entrada e saída UCP UNIDADE
Microcontroladores. Rafael Silva de Lima https://sites.google.com/site/pensante91/
 Microcontroladores Rafael Silva de Lima rafael_silvadelima@yahoo.com.br https://sites.google.com/site/pensante91/ CETTPS Centro de Ensino Técnico e Profissionalizante Curso Técnico em Automação/ Eletrotécnica
Microcontroladores Rafael Silva de Lima rafael_silvadelima@yahoo.com.br https://sites.google.com/site/pensante91/ CETTPS Centro de Ensino Técnico e Profissionalizante Curso Técnico em Automação/ Eletrotécnica
ENG-1450 Microcontroladores e Sistemas Embarcados. Lab02 Apresentação Kit PicGenios Interrupção e Timers
 ENG-1450 Microcontroladores e Sistemas Embarcados Lab02 Apresentação Kit PicGenios Interrupção e Timers Atividades 1. Executar tarefas da aula anterior no kit 2. Exemplo1: 1.Acionar o LED por interrupção
ENG-1450 Microcontroladores e Sistemas Embarcados Lab02 Apresentação Kit PicGenios Interrupção e Timers Atividades 1. Executar tarefas da aula anterior no kit 2. Exemplo1: 1.Acionar o LED por interrupção
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
Cerne. Conhecimento para o Desenvolvimento. Cerne Tecnologia e Treinamento
 Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de Assembly para o PIC16F628A (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe:
Conhecimento para o Desenvolvimento Cerne Tecnologia e Treinamento Apostila de Assembly para o PIC16F628A (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe:
AULA2 Introdução a Microcontrolador. Disciplina: Aplicações Avançadas de Microprocessadores (AAM)
") AULA2 Introdução a Microcontrolador Disciplina: Aplicações Avançadas de Microprocessadores (AAM) Tópicos: Microcontroladores - Evolução Principais características dos Microcontroladores Fabricantes de
AULA2 Introdução a Microcontrolador Disciplina: Aplicações Avançadas de Microprocessadores (AAM) Tópicos: Microcontroladores - Evolução Principais características dos Microcontroladores Fabricantes de
Organização de Sistemas Computacionais Processadores: Organização da CPU
 Universidade Paulista UNIP Curso: Ciências da Computação Turma: CCP30 Turno: Noturno Disciplina: Arquitetura de Computadores Professor: Ricardo Loiola Alunos: Thiago Gomes dos Santos Matrícula: C63873-0
Universidade Paulista UNIP Curso: Ciências da Computação Turma: CCP30 Turno: Noturno Disciplina: Arquitetura de Computadores Professor: Ricardo Loiola Alunos: Thiago Gomes dos Santos Matrícula: C63873-0
Suporta os microcontroladores: R. Leonardo da Vinci, Campinas/SP CEP F.: (19) Kit de Desenvolvimento ACEPIC 28
 Kit de Desenvolvimento ACEPIC 28") Suporta os microcontroladores: PIC16F870, PIC16F872, PIC16F873A, PIC16F876A, PIC16F886, PIC18F2420, PIC18F2520, PIC18F2525, PIC18F2620, PIC18F2455, PIC 18F2550 e outros com 28 pinos O Kit de desenvolvimento
Suporta os microcontroladores: PIC16F870, PIC16F872, PIC16F873A, PIC16F876A, PIC16F886, PIC18F2420, PIC18F2520, PIC18F2525, PIC18F2620, PIC18F2455, PIC 18F2550 e outros com 28 pinos O Kit de desenvolvimento
Prof. Adilson Gonzaga
 Prof. Adilson Gonzaga Outras características importantes em Microprocessadores/Microcontroladores Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos
Prof. Adilson Gonzaga Outras características importantes em Microprocessadores/Microcontroladores Redução de Potência de Operação As versões CHMOS (89C51, 89S52, etc ) da família MCS-51 possuem dois modos
SEL-433 Aplicação de Microprocessadores I. Prof: Adilson Gonzaga
 SEL-433 Aplicação de Microprocessadores I Prof: Adilson Gonzaga HISTÓRICO Microprocessador Circuito integrado ( chip ) capaz de executar instruções. 1971 Intel Corporation lançou no mercado o microprocessador
SEL-433 Aplicação de Microprocessadores I Prof: Adilson Gonzaga HISTÓRICO Microprocessador Circuito integrado ( chip ) capaz de executar instruções. 1971 Intel Corporation lançou no mercado o microprocessador
Família 8051 (introdução) 2011/1
 2011/1") Família 8051 (introdução) 2011/1 Refresh Microprocessador vs. microcontrolador. Periféricos built-in. Single-chip computer 2 Objetivos Histórico Modelos da família original Principais características Diagrama
Família 8051 (introdução) 2011/1 Refresh Microprocessador vs. microcontrolador. Periféricos built-in. Single-chip computer 2 Objetivos Histórico Modelos da família original Principais características Diagrama
Sistemas Embarcados:
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Temporizadores e Contadores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Temporizadores
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Embarcados: Temporizadores e Contadores DCA0119 Sistemas Digitais Heitor Medeiros Florencio Temporizadores
Temporização Interrupções. Prof: Evandro L. L. Rodrigues. Rotinas de Atraso
 Temporização Interrupções Prof: Evandro L. L. Rodrigues Rotinas de Atraso Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar
Temporização Interrupções Prof: Evandro L. L. Rodrigues Rotinas de Atraso Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar
ENGENHARIA DE SISTEMAS MICROPROCESSADOS
 ENGENHARIA DE SISTEMAS MICROPROCESSADOS Prof. Pierre Vilar Dantas Turma: 0040-A Horário: 4N Aula 01-26/07/2017 Plano de ensino Professor www.linkedin.com/in/pierredantas/ TÓPICOS Conceitos gerais. Evolução
ENGENHARIA DE SISTEMAS MICROPROCESSADOS Prof. Pierre Vilar Dantas Turma: 0040-A Horário: 4N Aula 01-26/07/2017 Plano de ensino Professor www.linkedin.com/in/pierredantas/ TÓPICOS Conceitos gerais. Evolução
Faculdade de Tecnologia SENAI Pernambuco - Unidade Santo Amaro Curso de Tecnologia em Mecatrônica Industrial
 Serviço Nacional de Aprendizagem Industrial Departamento Regional de Pernambuco Faculdade de Tecnologia SENAI Pernambuco - Unidade Santo Amaro Curso de Tecnologia em Mecatrônica Industrial Disciplina:
Serviço Nacional de Aprendizagem Industrial Departamento Regional de Pernambuco Faculdade de Tecnologia SENAI Pernambuco - Unidade Santo Amaro Curso de Tecnologia em Mecatrônica Industrial Disciplina:
Disciplina : Microcontroladores AVR
 Curso: Técnico em Automação Industrial Integrado ao Ensino Médio Disciplina : AVR Prof. Thiago Javaroni Prati Família AVR Os microcontroladores AVR da fabricante ATMEL são microcontroladores de 8 bits
Curso: Técnico em Automação Industrial Integrado ao Ensino Médio Disciplina : AVR Prof. Thiago Javaroni Prati Família AVR Os microcontroladores AVR da fabricante ATMEL são microcontroladores de 8 bits
AAAA AAAA SEL Aplicação de Microprocessadores I. Aula 5 Temporização e Interrupção. Marcelo Andrade da Costa Vieira
 SEL 0629 Aplicação de Microprocessadores I Aula 5 Temporização e Interrupção Marcelo Andrade da Costa Vieira Contagem de Tempo Contando tempo Existem 3 maneiras de contarmos tempo com os microcontroladores
SEL 0629 Aplicação de Microprocessadores I Aula 5 Temporização e Interrupção Marcelo Andrade da Costa Vieira Contagem de Tempo Contando tempo Existem 3 maneiras de contarmos tempo com os microcontroladores
Placa McLab1 Upgrade PIC16F84A p/ PIC16F62x
 Placa Upgrade PIC16F84A p/ PIC16F62x Sumário 1. UTILIZANDO OS PICS 16F62X...3 1.1. INTRODUÇÃO...3 2. ATUALIZAÇÃO DO HARDWARE...4 2.1. UPGRADE DA PLACA MCLAB1 PARA TRABALHAR COM PIC16F627 / PIC16F628...4
Placa Upgrade PIC16F84A p/ PIC16F62x Sumário 1. UTILIZANDO OS PICS 16F62X...3 1.1. INTRODUÇÃO...3 2. ATUALIZAÇÃO DO HARDWARE...4 2.1. UPGRADE DA PLACA MCLAB1 PARA TRABALHAR COM PIC16F627 / PIC16F628...4
Sistemas Digitais EDUARDO ELIAS ALVES PEREIRA
 Sistemas Digitais EDUARDO ELIAS ALVES PEREIRA Sistemas Digitais Agenda Arduino Tipos, detalhes; Esquema elétrico. IDEs Eagle; ATMel Studio; Arduino Studio; Circuits IO (Simulador). Arduino Arduino MEGA2560
Sistemas Digitais EDUARDO ELIAS ALVES PEREIRA Sistemas Digitais Agenda Arduino Tipos, detalhes; Esquema elétrico. IDEs Eagle; ATMel Studio; Arduino Studio; Circuits IO (Simulador). Arduino Arduino MEGA2560
Sistemas Microprocessados
 Sistemas Microprocessados satoutfpredubr http://pessoal.utfpr.edu.br/sato/ Interrupções no ATmega8 satoutfpredubr Sobre o material Essas transparências foram baseadas no manual
Sistemas Microprocessados satoutfpredubr http://pessoal.utfpr.edu.br/sato/ Interrupções no ATmega8 satoutfpredubr Sobre o material Essas transparências foram baseadas no manual
Sistemas Digitais: Introdução
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Digitais: Introdução DCA0119 Sistemas Digitais Heitor Medeiros Florencio 1 Objetivo: Projetar Sistemas
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação Sistemas Digitais: Introdução DCA0119 Sistemas Digitais Heitor Medeiros Florencio 1 Objetivo: Projetar Sistemas
Temporização da CPU SEL-433 APLICAÇÕES DE MICROPROCESSADORES I. Ciclos de Máquina. Ciclos de Máquina. Temporização Interrupções Rotinas de Atraso
 SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Temporização da CPU Todos os Microcontroladores da família MCS-51 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados Contador/Temporizador
Sumário. 1. Apresentação Hardware Microcontrolador PIC16F628A Displays de 7 segmentos Teclas...
 02/03/2011 Sumário 1. Apresentação... 3 2. Hardware... 4 2.1. Microcontrolador PIC16F628A... 4 2.2. Displays de 7 segmentos... 4 2.3. Teclas... 4 2.4. Leds... 5 2.5. Lâmpada... 5 2.6. Botão de reset manual...
02/03/2011 Sumário 1. Apresentação... 3 2. Hardware... 4 2.1. Microcontrolador PIC16F628A... 4 2.2. Displays de 7 segmentos... 4 2.3. Teclas... 4 2.4. Leds... 5 2.5. Lâmpada... 5 2.6. Botão de reset manual...
Prof. Adilson Gonzaga
 Exemplo de Projeto com Microcontrolador MCS-51 Prof. Adilson Gonzaga Definições Iniciais: Microcontrolador Tamanho da Memória de Programa Interna define o tamanho da Memória de Programa Externa a ser utilizada.
Exemplo de Projeto com Microcontrolador MCS-51 Prof. Adilson Gonzaga Definições Iniciais: Microcontrolador Tamanho da Memória de Programa Interna define o tamanho da Memória de Programa Externa a ser utilizada.
Parte II Arquitetura. professorferlin.blogspot.com. professorferlin.blogspot.com. Sociedade Paranaense de Ensino e Informática
 www.spei.br Sociedade Paranaense de Ensino e Informática Parte II Arquitetura 2 1 Estrutura Básica 3 4 2 Arquitetura Básica 5 CLP x Computador A fonte de alimentação possui características ótimas de filtragem
www.spei.br Sociedade Paranaense de Ensino e Informática Parte II Arquitetura 2 1 Estrutura Básica 3 4 2 Arquitetura Básica 5 CLP x Computador A fonte de alimentação possui características ótimas de filtragem
SSC510 Arquitetura de Computadores 1ª AULA
 SSC510 Arquitetura de Computadores 1ª AULA REVISÃO DE ORGANIZAÇÃO DE COMPUTADORES Arquitetura X Organização Arquitetura - Atributos de um Sistema Computacional como visto pelo programador, isto é a estrutura
SSC510 Arquitetura de Computadores 1ª AULA REVISÃO DE ORGANIZAÇÃO DE COMPUTADORES Arquitetura X Organização Arquitetura - Atributos de um Sistema Computacional como visto pelo programador, isto é a estrutura
SSC512 Elementos de Lógica Digital. Memórias. GE4 Bio
 Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação Departamento de Sistemas de Computação Elementos de Memórias GE4 Bio GE4Bio Grupo de Estudos em Sinais Biológicos Prof.Dr. Danilo
Universidade de São Paulo Instituto de Ciências Matemáticas e de Computação Departamento de Sistemas de Computação Elementos de Memórias GE4 Bio GE4Bio Grupo de Estudos em Sinais Biológicos Prof.Dr. Danilo
Profª Danielle Casillo
 UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Aula 05 Introdução ao CLP Profª Danielle Casillo CONTROLADOR LÓGICO PROGRAMÁVEL -CLP 2 CONTROLADOR LÓGICO PROGRAMÁVEL
UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO CURSO: CIÊNCIA DA COMPUTAÇÃO Automação e Controle Aula 05 Introdução ao CLP Profª Danielle Casillo CONTROLADOR LÓGICO PROGRAMÁVEL -CLP 2 CONTROLADOR LÓGICO PROGRAMÁVEL
Cerne. Conhecimento para o Desenvolvimento. Cerne Tecnologia e Treinamento
 Conhecimento para o Desenvolvimento Tecnologia e Treinamento Apostila de Assembly para AT89S8252 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
Conhecimento para o Desenvolvimento Tecnologia e Treinamento Apostila de Assembly para AT89S8252 (21) 4063-9798 (11) 4063-1877 E-mail: cerne@cerne-tec.com.br MSN: cerne-tec@hotmail.com Skipe: cerne-tec
29/03/2017. Temporização da CPU SEL-433 APLICAÇÕES DE MICROPROCESSADORES I. Ciclos de Máquina. Ciclos de Máquina
 SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Temporização da CPU Todos os Microcontroladores da família MCS-5 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Temporização da CPU Todos os Microcontroladores da família MCS-5 têm um oscilador interno. Para uso deste oscilador deve-se conectar um cristal entre os pinos
9/3/2009. Aula 4. Engenharia de Sistemas Embarcados. Cenário: Sistema de Controle de LEDs
 Cenário: Sistema de Controle de LEDs Sistema Embarcado Aula 4 Sistema Engenharia de Sistemas Embarcados Prof. Abel Guilhermino Tópico: Arquitetura de um microcontrolador 851 Engenharia de Sistemas Embarcados
Cenário: Sistema de Controle de LEDs Sistema Embarcado Aula 4 Sistema Engenharia de Sistemas Embarcados Prof. Abel Guilhermino Tópico: Arquitetura de um microcontrolador 851 Engenharia de Sistemas Embarcados
Microcontrolador PIC: Conceitos Básicos
 Microcontrolador PIC: Conceitos Básicos Curta Eletrônica José W. R. Pereira 16A19 Resumo Com o objetivo de desbravar o funcionamento de um microcontrolador, este material busca de uma forma simples, mas
Microcontrolador PIC: Conceitos Básicos Curta Eletrônica José W. R. Pereira 16A19 Resumo Com o objetivo de desbravar o funcionamento de um microcontrolador, este material busca de uma forma simples, mas
Curso de Microcontroladores PIC 16F84A
 Curso de Microcontroladores PIC 16F84A João Neto Caetano Jnetcaetano@hotmail.com Marciel Gonçalves Azevedo Marcielgazevedo@hotmail.com Célio Rodrigues Pinto Treinamentos em geral, suporte a alunos universitários
Curso de Microcontroladores PIC 16F84A João Neto Caetano Jnetcaetano@hotmail.com Marciel Gonçalves Azevedo Marcielgazevedo@hotmail.com Célio Rodrigues Pinto Treinamentos em geral, suporte a alunos universitários
Aula 4. Engenharia de Sistemas Embarcados. Prof. Abel Guilhermino Tópico: Arquitetura de um microcontrolador 8051
 Aula 4 Engenharia de Sistemas Embarcados Prof. Abel Guilhermino Tópico: Arquitetura de um microcontrolador 8051 Cenário: Sistema de Controle de LEDs Sistema Embarcado Sistema Engenharia de Sistemas Embarcados
Aula 4 Engenharia de Sistemas Embarcados Prof. Abel Guilhermino Tópico: Arquitetura de um microcontrolador 8051 Cenário: Sistema de Controle de LEDs Sistema Embarcado Sistema Engenharia de Sistemas Embarcados
Interrupções e Timers
 Interrupções e timers Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 4 de dezembro de 2013 Objetivos Compreender o funcionamento de um display de sete segmentos Compreender
Interrupções e timers Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 4 de dezembro de 2013 Objetivos Compreender o funcionamento de um display de sete segmentos Compreender
Microcontroladores PROF. ME. HÉLIO ESPERIDIÃO
 Microcontroladores PROF. ME. HÉLIO ESPERIDIÃO Microprocessador É um circuito integrado que contém milhares, ou mesmo milhões, de transistores. Os transistores trabalham juntos para armazenar e manipular
Microcontroladores PROF. ME. HÉLIO ESPERIDIÃO Microprocessador É um circuito integrado que contém milhares, ou mesmo milhões, de transistores. Os transistores trabalham juntos para armazenar e manipular
A placa descrita pode receber alimentação pela conexão USB ou por uma fonte de alimentação externa.
 A placa descrita pode receber alimentação pela conexão USB ou por uma fonte de alimentação externa. A alimentação externa ocorre através do conector Jack com o pino positivo no centro, onde o valor de
A placa descrita pode receber alimentação pela conexão USB ou por uma fonte de alimentação externa. A alimentação externa ocorre através do conector Jack com o pino positivo no centro, onde o valor de
Microcontroladores e Microprocessadores
 Microcontroladores e Microprocessadores Prof. Alison Lins Microcontrolador Agenda - Histórico da Evolução da Eletrônica - Microprocessadores - Memórias - Microcontroladores - Microcontrolador x Microprocessador
Microcontroladores e Microprocessadores Prof. Alison Lins Microcontrolador Agenda - Histórico da Evolução da Eletrônica - Microprocessadores - Memórias - Microcontroladores - Microcontrolador x Microprocessador
Componentes de um computador Microcontroladores e microprocessadores Tecnologia em Manutenção Industrial MICROCONTROLADORES PROFESSOR FLÁVIO MURILO
 Componentes de um computador Microcontroladores e microprocessadores Tecnologia em Manutenção Industrial 1 Componentes dos computadores CPU; Memórias; Dispositivos de Entrada e Saída (E/S) - Input/Output
Componentes de um computador Microcontroladores e microprocessadores Tecnologia em Manutenção Industrial 1 Componentes dos computadores CPU; Memórias; Dispositivos de Entrada e Saída (E/S) - Input/Output
ULA (ALU) - UNIDADE DE ARITMÉTICA E LÓGICA
 - UNIDADE DE ARITMÉTICA E LÓGICA") FATEC SP - Análise e Desenvolv. De Sistemas - Ambiente Operacional PÁG. 1 II) ELEMENTOS DE HARDWARE: DIAGRAMA DE BLOCOS DE UM COMPUTADOR 1) CPU - UNIDADE CENTRAL DE PROCESSAMENTO RESPONSÁVEL PELA EXECUÇÃO
FATEC SP - Análise e Desenvolv. De Sistemas - Ambiente Operacional PÁG. 1 II) ELEMENTOS DE HARDWARE: DIAGRAMA DE BLOCOS DE UM COMPUTADOR 1) CPU - UNIDADE CENTRAL DE PROCESSAMENTO RESPONSÁVEL PELA EXECUÇÃO
Application Note FBEE Controle de Placas com entradas Analógicas REV01. 1 Rev01
 Application Note FBEE Controle de Placas com entradas Analógicas REV01 1 Rev01 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
Application Note FBEE Controle de Placas com entradas Analógicas REV01 1 Rev01 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
MINISTÉRIO DA EDUCAÇÃO CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS DIRETORIA DE GRADUAÇÃO
 DISCIPLINA: SISTEMAS MICROPROCESSADOS CÓDIGO: EAI.707 Período Letivo: 1º Semestre / 2018 Carga Horária: Total: 72H/A Semanal: 0 aulas Créditos: 0 Modalidade: Teórica Classificação do Conteúdo pelas DCN:
DISCIPLINA: SISTEMAS MICROPROCESSADOS CÓDIGO: EAI.707 Período Letivo: 1º Semestre / 2018 Carga Horária: Total: 72H/A Semanal: 0 aulas Créditos: 0 Modalidade: Teórica Classificação do Conteúdo pelas DCN:
Características técnicas Baseado no ATMega da empresa AVR, fabricante de micro-controladores em plena ascensão e concorrente do PIC Pode usar ATMega
 ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
Introdução à Ciência da Computação
 1 Universidade Federal Fluminense Campus de Rio das Ostras Curso de Ciência da Computação Introdução à Ciência da Computação Professor: Leandro Soares de Sousa e-mail: lsousa@id.uff.br site: http://www.ic.uff.br/~lsousa
1 Universidade Federal Fluminense Campus de Rio das Ostras Curso de Ciência da Computação Introdução à Ciência da Computação Professor: Leandro Soares de Sousa e-mail: lsousa@id.uff.br site: http://www.ic.uff.br/~lsousa
Controlador Lógico Programável
 Controlador Lógico Programável Prof. Stefano 1 Definição IEC 1131-3 É um equipamento de controle composto de componentes eletrônicos e memória programável que contém dados e programas com a finalidade
Controlador Lógico Programável Prof. Stefano 1 Definição IEC 1131-3 É um equipamento de controle composto de componentes eletrônicos e memória programável que contém dados e programas com a finalidade
Data Sheet FBEE Kit V05
 Data Sheet FBEE Kit V05 IEEE 802.15.4 SUPORTA PROTOCOLOS ZIGBEE E MIWI REV 02 1 Rev02 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
Data Sheet FBEE Kit V05 IEEE 802.15.4 SUPORTA PROTOCOLOS ZIGBEE E MIWI REV 02 1 Rev02 1. INTRODUÇÃO Este capítulo faz uma introdução às características do kit de demonstração FBee Kit. Este capítulo discute:
DEFINIÇÃO É TODO AQUELE DISPOSITIVO CAPAZ DE ARMAZENAR INFORMAÇÃO. A
 U E S C Memória DEFINIÇÃO É TODO AQUELE DISPOSITIVO CAPAZ DE ARMAZENAR INFORMAÇÃO. A Hierarquia de Memória Em um Sistema de computação existem vários tipos de memória que interligam-se de forma bem estrutura
U E S C Memória DEFINIÇÃO É TODO AQUELE DISPOSITIVO CAPAZ DE ARMAZENAR INFORMAÇÃO. A Hierarquia de Memória Em um Sistema de computação existem vários tipos de memória que interligam-se de forma bem estrutura
Microprocessadores vs Microcontroladores
 Microprocessadores vs Microcontroladores Um microcontrolador difere de um microprocessador em vários aspectos. Primeiro e o mais importante, é a sua funcionalidade. Para que um microprocessador possa ser
Microprocessadores vs Microcontroladores Um microcontrolador difere de um microprocessador em vários aspectos. Primeiro e o mais importante, é a sua funcionalidade. Para que um microprocessador possa ser
Sistemas Digitais e Microcontrolados
 UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados - PIC16F877A
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETROTÉCNICA CURSO DE ENGENHARIA INDUSTRIAL ELÉTRICA TECNOLOGIA EM AUTOMAÇÃO INDUSTRIAL Sistemas Digitais e Microcontrolados - PIC16F877A