|
|
|
- Filipe de Caminha Teixeira
- 6 Há anos
- Visualizações:
Transcrição

1

2

3

4

5

6

7

8
9

10

11
12
13 Primeiras Máquinas Ferramentas Manuais Movimentação através de volantes, manivelas, alavancas e correias Automação através de cames e seguidores (alto volume de produção)


14 Controle Manual - Torno Automático mecânico Mário Prof. Mário Luiz Tronco Luiz Tronco


15 Operador: é o controlador do torno. Através de movimentos dos manípulos do torno (em valores correspondentes aos desvios desejados), desloca a ferramenta para a posição desejada e realiza um novo passo de usinagem. Mário Prof. Mário Luiz Tronco Luiz Tronco

16 Automação rígida Necessidade de uma máquina flexível, capaz de se adaptar facilmente a uma mudança no tipo de peça a ser produzida.
17 Histórico John Parsons controle da máquina através de dados numéricos Força Aérea Americana asas de aviões com perfil complexo - alto custo Massachussets Institute of Technology(MIT) Mário Prof. Mário Luiz Tronco Luiz Tronco
18 Comando Numérico - Definição Um sistema no qual as ações são controladas através da inserção direta de dados numéricos em algum ponto. O sistema deve interpretar automaticamente pelo menos parte destes dados. Isto significa que o comando numérico deve ser capaz de receber informações através de alguma entrada de dados própria, interpretá-las e transmiti-las em forma de comando à máquina-ferramenta de modo que esta realize as operações desejadas. Mário Prof. Mário Luiz Tronco Luiz Tronco
19 Máquinas ferramentas Aplicações Tornos,Fresadoras, Furadeiras Máquinas de medir a três coordenadas - Inspeção Máquinas para soldagem Máquinas para indústria têxtil Pranchetas de desenho - CAD Robôs Mário Prof. Mário Luiz Tronco Luiz Tronco
20 Princípios Básicos do Comando Numérico

21 ELEMENTOS PRINCIPAIS %10 N10 G00 Z100 T1 PROGRAMA CN COMANDO NUMÉRICO N20 G94 G90 N30 G00 X32 Z4 S2000 M03 M08 N40 G01 Z0 F400 N50 X-1 N60 G00 X26 Z1 N70 G01 Z-30 F400 N80 X32 N90 G00 Z2 N100 G01 X22 F1200 S2980 N110 Z-21 F600 MÁQUINA FERRAMENTA
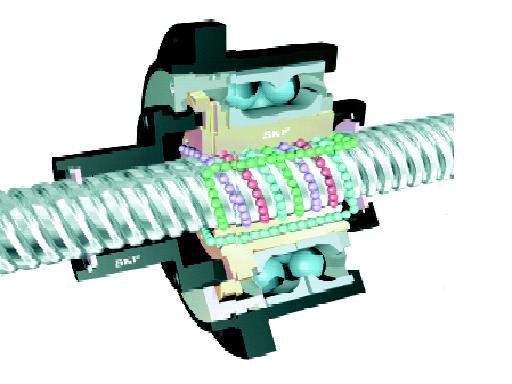
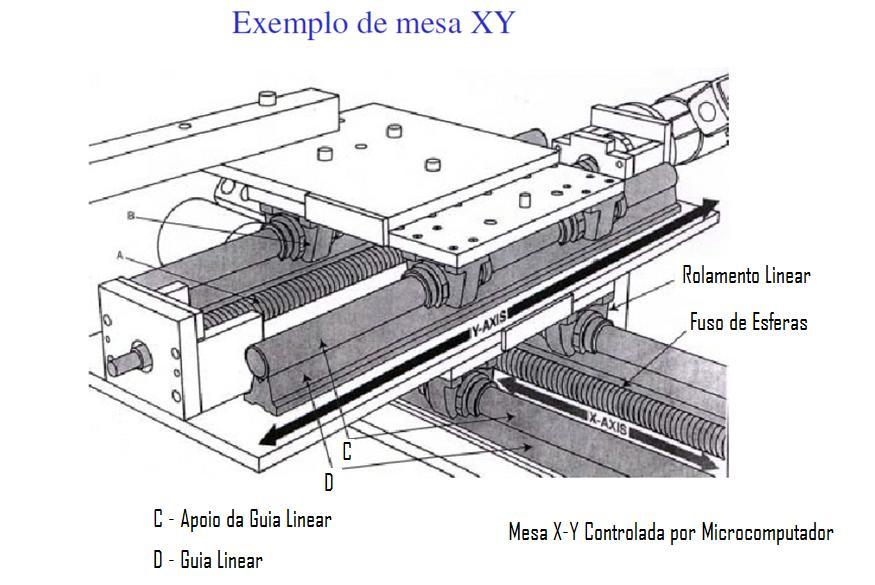
22 Eixos de Movimento Cada direção de movimento é chamada de eixo de movimento da máquina Normalmente existem de 2 a 5 eixos Lineares e rotativos Cada eixo é composto de um Elemento que translada ou gira (mesa) Servomotor fornece a potência para o eixo Fuso de esferas transmite a potência do motor para o elemento.
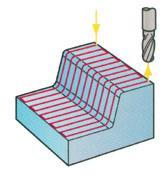
23 Rotativos Movimento ocorre ao longo de um círculo Algumas máquinas requerem rotação da peça durante usinagem Outras requerem que a ferramenta possa girar de um certo ângulo assumindo diferentes posições Ex: usinagem de uma superfície curva com ferramenta sempre perpendicular à superfície
24 OS EIXOS PODEM SER : LINEARES OU ROTATIVOS Lineares Movimento ocorre ao longo de uma linha reta Mesa + Porca + Parafuso + Motor + Sensor Acuracidade de deslocamento linear e posicionamento Alta rigidez e controle de velocidade
25

26 SISTEMA CNC BÁSICO Fuso de esferas recirculantes Eixo Árvore Eixo-árvore Movimento da mesa Dispositivo de realimentação Sinal de comando do motor Sinal de realimentação

27

28
29
30
31
32
33 Eixos em Máquinas a Comando Numérico Eixo Z A convenção adotada para Máquinas CNC é identificar o eixo Z como sendo o que fornece a velocidade de corte, O sentido positivo do eixo Z é aquele no qual a ferramenta se afasta da peça.
34
35
36
37
38 Como implementar? Revisão sobre lógica Booleana/Sistemas Digitais; Revisão sobre Sistemas de Controle
39 Exemplos de Configurações dos Eixos

40 Configuração de 2 Eixos X Z

41 Configuração Dois Eixos e Meio (2 ½)

42 Configuração 3 Eixos Interpolação simultânea em três eixos
43 Configuração Multi-Eixos

44 Configurações Especiais Torno CNC com duas torres porta-ferramentas

45 Configurações Especiais Fresar Tornear Torno CNC com torre porta-ferramentas para fresamento

46 Configurações Especiais Torno CNC com dois eixos-árvore e quatro torres

47 Configurações Especiais Centro de Usinagem Hexapode
48 TIPOS DE MÁQUINAS-FERRAMENTAS A COMANDO NUMÉRICO TORNOS CENTROS DE TORNEAMENTO FRESADORAS CENTROS DE USINAGEM MANDRILADORAS OUTROS
49 Centros de Torneamento - CT: São tornos equipados com Comando Numérico que podem realizar operações de tornear, facear, fazer canais, roscar, usinar contornos, etc. Torno CNC

50 Fresadora CNC

51 Centro de Furação e Roscamento

52 Retíficas: Utilizadas em processos que exigem elevada capacidade de produção aliada a alto grau de precisão e repetibilidade;

53 Mandriladora Vertical CNC

54 Plainas: Realizam operações nas várias faces do objeto com elevado grau de precisão e retilineidade da superfície e paralelismo entre as superfícies usinadas;

55

56
57 Centros de Usinagem - São máquinas CNC que associam as capacidades das diferentes máquinas ferramentas. São capazes de realizar operações de faceamento, fresamento, mandrilhamento, furação, roscamento, operações de abrir canais, rasgos, fazer contornos, superfícies, etc. em vários planos; Em relação à posição do eixo árvore os Centros de Usinagem podem ser classificados em verticais e horizontais: - Verticais: são aqueles cuja direção de profundidade, isto é, a direção de movimento do eixo árvore é vertical. Indicadas para peças de pouca altura com usinagem restrita a uma ou duas faces;
58 Centros de Usinagem Horizontais: são aqueles cuja direção de profundidade, isto é, a direção de movimento do eixo árvore é horizontal. Indicados para usinar peças de grande volume, pois é possível trabalhar qualquer face com facilidade de carga e descarga da máquina;

59 Centro de Usinagem Horizontal CNC

60 Centro de Usinagem Vertical CNC

61 Centro de Usinagem Vertical Romi

62 Estrutura Típica de um Centro de Usinagem Vertical

63 Sistemas Integrados de Fabricação: são Centros de Usinagem Verticais e Horizontais interligados num único sistema de fabricação, versáteis e altamente produtivos;

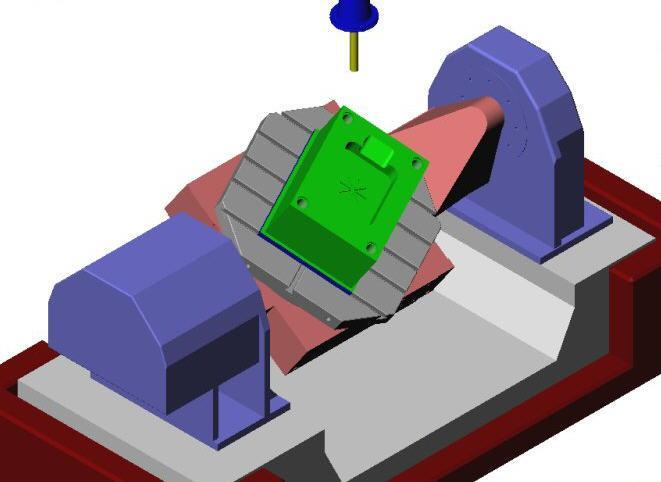
64 Centro de Usinagem 5 Eixos Cabeçote com giro controlado Três movimentos lineares Dois movimentos rotativos Mesa com giro controlado
65 ACESSÓRIOS

66 Magazine de Ferramentas
67 Sistema Multi-Pallets

68 Sistema de Carga e Descarga de Peças

69

70
71 Comando Numérico (CN), Comando Numérico Computadorizado (CNC) e Comando Numérico Adaptativo (CNA) CN representa a tecnologia de Comando Numérico antiga e original e CNC representa a tecnologia mais moderna; Ambos os sistemas realizam as mesmas tarefas de manipulação de dados destinados à realização de alguma tarefa. As funções lógicas do sistema de controle são realizadas através de componentes eletrônicos; O sistema CN usa funções lógicas fixas, permanentemente alocadas na unidade de controle => não podem ser alteradas pelo programador CN ou operador da máquina;
72 O sistema CN pode interpretar o programa NC, mas não permite nenhuma modificação do programa, usando as características do controle. Qualquer modificação precisa ser feita em laboratório adequado; O sistema CNC usa um microprocessador (um computador) que contém registros de memória que armazenam uma grande variedade de rotinas capazes de manipular funções lógicas o programador CN ou o operador da máquina podem mudar o programa na própria máquina. Esta flexibilidade é a maior vantagem do sistema CNC;
73 No sistema CNC o programa e as funções lógicas são armazenadas em microprocessadores como funções de software, ao invés de serem construídas por componentes eletrônicos como no sistema CN; Obs.: a sigla CN pode se referir tanto ao Comando Numérico (antiga tecnologia) quanto ao Comando Numérico Computadorizado (nova tecnologia). Por outro lado, CNC nunca se refere ao antigo Comando Numérico;
74 Comando Numérico Adaptativo (CNA) Além de controlar os movimentos da máquina, um sistema CNA é dotado de mecanismos que o permitem monitorar e controlar variáveis como velocidade de corte, avanço, medidas da peca, vibração e posicionamento, etc.
75 CN e CNC controlados por um computador central A sigla DNC representa um sistema composto de hardware e software que permite o controle de várias máquinas CN e CNC através de um computador central. Se apresentam em duas versões: DNC - Direct Numerical Control: Envolve o controle de um grupo de máquinas por um único computador através de uma conexão direta e em tempo real: o programa é transmitido bloco a bloco diretamente às máquinas CN; diferencia-se do CN convencional apenas pela forma de transmissão do programa à máquina;
76 Além de enviar dados às máquinas, o computador central também recebe feedback das máquinas => o objetivo central do Comando Numérico Direto era ter uma comunicação de duas vias entre as máquinas e o computador central;
77 As vantagens atribuídas ao Comando Numérico Distribuído nos anos 70 incluíam: alta confiabilidade de um computador central comparado com unidades de controle individuais; eliminação da fita e da leitora de fita, que não eram confiáveis e fonte de problemas; controle de várias máquinas por um único computador; maior capacidade computacional para interpolação circular; programas armazenados magneticamente em memória num unidade central; computador central localizado num ambiente adequado;
78 DNC - Distributed Numerical Control: Com o crescimento das instalações de máquinas CNC surgiu nos anos 80 uma nova concepção para o DNC, que agora significa Comando Numérico Distribuído (Distributed Numerical Control); sua configuração é similar ao Comando Numérico Direto exceto que o computador central está conectado às unidades de controle que também são computadores, permitindo assim: envio de programas inteiros à máquina; implementação mais fácil e mais barata, já que permite a instalação das máquinas CNC e colocação em funcionamento, com posterior instalação do sistema DNC;
79
5838 Maquinação Introdução ao CNC
 5838 Maquinação Introdução ao CNC Formador: Hélder Nunes 13 Valores Formanda: Ana Pernas Índice Introdução... 3 Enquadramento... 4 Vantagens vs Desvantagens do CNC... 5 Características de um sistema CNC...
5838 Maquinação Introdução ao CNC Formador: Hélder Nunes 13 Valores Formanda: Ana Pernas Índice Introdução... 3 Enquadramento... 4 Vantagens vs Desvantagens do CNC... 5 Características de um sistema CNC...
Aula 4-Movimentos,Grandezas e Processos
 Movimentos de Corte Os movimentos entre ferramenta e peça durante a usinagem são aqueles que permitem a ocorrência do processo de usinagem.convencionalmente se supõe a peça parada e todo o movimento sendo
Movimentos de Corte Os movimentos entre ferramenta e peça durante a usinagem são aqueles que permitem a ocorrência do processo de usinagem.convencionalmente se supõe a peça parada e todo o movimento sendo
Processos de Fabricação Mecânica
 Processos de Fabricação Mecânica Bibliografia básica: DINIZ, Anselmo Eduardo; MARCONDES, Francisco C. e COPPINI, Nivaldo L Tecnologia da Usinagem dos Materiais, Editora Artliber. FERRARESI, D.- Fundamentos
Processos de Fabricação Mecânica Bibliografia básica: DINIZ, Anselmo Eduardo; MARCONDES, Francisco C. e COPPINI, Nivaldo L Tecnologia da Usinagem dos Materiais, Editora Artliber. FERRARESI, D.- Fundamentos
2.7.2 Fichas de instrução 2.8 Dossier de fabricação para a maquinagem de peças mecânicas 2.9 Determinação do método de fabricação
 Prefácio à 1ª edição Capítulo 1 Tecnologia dos equipamentos 1.1 A evolução dos métodos de fabrico 1.1.1 O aparecimento do controlo numérico 1.1.2 O que é o controlo numérico 1.1.3 O que é a programação
Prefácio à 1ª edição Capítulo 1 Tecnologia dos equipamentos 1.1 A evolução dos métodos de fabrico 1.1.1 O aparecimento do controlo numérico 1.1.2 O que é o controlo numérico 1.1.3 O que é a programação
Aula 03. Processadores. Prof. Ricardo Palma
 Aula 03 Processadores Prof. Ricardo Palma Definição O processador é a parte mais fundamental para o funcionamento de um computador. Processadores são circuitos digitais que realizam operações como: cópia
Aula 03 Processadores Prof. Ricardo Palma Definição O processador é a parte mais fundamental para o funcionamento de um computador. Processadores são circuitos digitais que realizam operações como: cópia
Hardware: Componentes Básicos. Sistema de Computador Pessoal. Anatomia de um Teclado. Estrutura do Computador. Arquitetura e Organização
 Hardware: Componentes Básicos Arquitetura dos Computadores Dispositivos de Entrada Processamento Dispositivos de Saída Armazenamento Marco Antonio Montebello Júnior marco.antonio@aes.edu.br Sistema de
Hardware: Componentes Básicos Arquitetura dos Computadores Dispositivos de Entrada Processamento Dispositivos de Saída Armazenamento Marco Antonio Montebello Júnior marco.antonio@aes.edu.br Sistema de
Anexo 2.8 Especificações do Sistema de Monitoramentoda Frota
 Anexo 2.8 Especificações do Sistema de Monitoramentoda Frota ÍNDICE 1 OBJETIVOS... 3 2 ESPECIFICAÇÃO BÁSICA... 3 2.1 AQUISIÇÃO DE DADOS MONITORADOS DO VEÍCULO... 3 2.2 AQUISIÇÃO DE DADOS DE LOCALIZAÇÃO...
Anexo 2.8 Especificações do Sistema de Monitoramentoda Frota ÍNDICE 1 OBJETIVOS... 3 2 ESPECIFICAÇÃO BÁSICA... 3 2.1 AQUISIÇÃO DE DADOS MONITORADOS DO VEÍCULO... 3 2.2 AQUISIÇÃO DE DADOS DE LOCALIZAÇÃO...
APRESENTAÇÃO TRIMBLE S3. Conheça a eficiência e a sofisticação da TRIMBLE S3
 Conheça a eficiência e a sofisticação da TRIMBLE S3 Disponível nos modos: Servo: Autolock: Robótica: Servo: -Estação Total com motores servos assistidos que realizam movimentos do círculo horizontal e
Conheça a eficiência e a sofisticação da TRIMBLE S3 Disponível nos modos: Servo: Autolock: Robótica: Servo: -Estação Total com motores servos assistidos que realizam movimentos do círculo horizontal e
INTRODUÇÃO À ROBÓTICA. Professor HENRIQUE
 INTRODUÇÃO À ROBÓTICA Professor HENRIQUE CONTEÚDO Introdução à Robótica Industrial Classificação Modelos e Tipos Aplicação Atividade de Pesquisa: Transmissão de Força Definição; Elementos Constituintes;
INTRODUÇÃO À ROBÓTICA Professor HENRIQUE CONTEÚDO Introdução à Robótica Industrial Classificação Modelos e Tipos Aplicação Atividade de Pesquisa: Transmissão de Força Definição; Elementos Constituintes;
Assim, você acaba de ver como essa peça (came) é importante. Por isso, nesta aula, você vai conhecê-la melhor.
 é importante. Por isso, nesta aula, você vai conhecê-la melhor.") A UU L AL A Came Uma moça viajava tranqüila de moto mas, na subida, percebeu que seu veículo perdia força. O mecânico de motos, após abrir o motor e examinar as peças, verificou que as cames do comando
A UU L AL A Came Uma moça viajava tranqüila de moto mas, na subida, percebeu que seu veículo perdia força. O mecânico de motos, após abrir o motor e examinar as peças, verificou que as cames do comando
SISTEMAS INOVADORES, SOLUÇÕES INTEGRADAS
 SISTEMAS INOVADORES, SOLUÇÕES INTEGRADAS GLOBALLY INNOVATIVE SOLUTIONS PROJETOS IMPOSSÍVEIS SÃO O NOSSO DIA A DIA O nosso percurso de 30 anos posiciona-nos na liderança do mercado na área da automação
SISTEMAS INOVADORES, SOLUÇÕES INTEGRADAS GLOBALLY INNOVATIVE SOLUTIONS PROJETOS IMPOSSÍVEIS SÃO O NOSSO DIA A DIA O nosso percurso de 30 anos posiciona-nos na liderança do mercado na área da automação
MÓDULO 2 Topologias de Redes
 MÓDULO 2 Topologias de Redes As redes de computadores de modo geral estão presentes em nosso dia adia, estamos tão acostumados a utilizá las que não nos damos conta da sofisticação e complexidade da estrutura,
MÓDULO 2 Topologias de Redes As redes de computadores de modo geral estão presentes em nosso dia adia, estamos tão acostumados a utilizá las que não nos damos conta da sofisticação e complexidade da estrutura,
Até 0.003 mm (0.1mm usualmente) Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40
 Aceleração Até 25 m/s 2. A partir de 2 a 3 kg até limites ~ 350kg. Relação Peso/Carga Em torno de 30 a 40") Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
Introdução à Robótica Industrial Prof. Dr. Carlo Pece Transparências adaptadas de material fornecido pelo prof. Winderson E. dos Santos Histórico Revolução Industrial Automação Karel Capek (1921) robota
TORNO ORBITAL PORTÁTIL CNC COMPLETO
 TORNO ORBITAL PORTÁTIL CNC COMPLETO Para torneamento no local com extrema precisão (completamente executada por um painel de controle CNC) nas faces e extremidades internas e/ou externas de superfícies
TORNO ORBITAL PORTÁTIL CNC COMPLETO Para torneamento no local com extrema precisão (completamente executada por um painel de controle CNC) nas faces e extremidades internas e/ou externas de superfícies
Inteligência Artificial
 Inteligência Artificial Aula 7 Programação Genética M.e Guylerme Velasco Programação Genética De que modo computadores podem resolver problemas, sem que tenham que ser explicitamente programados para isso?
Inteligência Artificial Aula 7 Programação Genética M.e Guylerme Velasco Programação Genética De que modo computadores podem resolver problemas, sem que tenham que ser explicitamente programados para isso?
GEOMETRIA. sólidos geométricos, regiões planas e contornos PRISMAS SÓLIDOS GEOMÉTRICOS REGIÕES PLANAS CONTORNOS
 PRISMAS Os prismas são sólidos geométricos muito utilizados na construção civil e indústria. PRISMAS base Os poliedros representados a seguir são denominados prismas. face lateral base Nesses prismas,
PRISMAS Os prismas são sólidos geométricos muito utilizados na construção civil e indústria. PRISMAS base Os poliedros representados a seguir são denominados prismas. face lateral base Nesses prismas,
Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso MATRIZ CURRICULAR
 em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso MATRIZ CURRICULAR") Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso CÂMPUS Araranguá MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 0h Eletricidade
Curso Técnico (Integrado/Concomitante/Subsequente) em Curso de (Engenharia, Tecnologia, Licenciatura) em Nome do Curso CÂMPUS Araranguá MATRIZ CURRICULAR Módulo/Semestre 1 Carga horária total: 0h Eletricidade
Como utilizar a tecnologia a favor da sua central de atendimento
 Como utilizar a tecnologia a favor da sua central de atendimento Conheça algumas tecnologias que podem melhorar a sua central de atendimento. URA: Como utilizar a tecnologia a favor da sua central de atendimento
Como utilizar a tecnologia a favor da sua central de atendimento Conheça algumas tecnologias que podem melhorar a sua central de atendimento. URA: Como utilizar a tecnologia a favor da sua central de atendimento
4 Sistema Computacional:
 4 Sistema Computacional: Hardware: são os componentes e dispositivos eletrônicos que operando em conjunto com outros componentes ou mesmo individualmente realizam uma das funções de um sistema de computação.
4 Sistema Computacional: Hardware: são os componentes e dispositivos eletrônicos que operando em conjunto com outros componentes ou mesmo individualmente realizam uma das funções de um sistema de computação.
CAPÍTULO 4 4. ELEMENTOS ESTRUTURAIS. 4.1 Classificação Geométrica dos Elementos Estruturais
 Elementos Estruturais 64 CAPÍTULO 4 4. ELEMENTOS ESTRUTURAIS 4.1 Classificação Geométrica dos Elementos Estruturais Neste item apresenta-se uma classificação dos elementos estruturais com base na geometria
Elementos Estruturais 64 CAPÍTULO 4 4. ELEMENTOS ESTRUTURAIS 4.1 Classificação Geométrica dos Elementos Estruturais Neste item apresenta-se uma classificação dos elementos estruturais com base na geometria
(11) Número de Publicação: PT 104681 A. (51) Classificação Internacional: H04L 5/00 (2006.01) (12) FASCÍCULO DE PATENTE DE INVENÇÃO
 Número de Publicação: PT 104681 A. (51) Classificação Internacional: H04L 5/00 (2006.01) (12) FASCÍCULO DE PATENTE DE INVENÇÃO") (11) Número de Publicação: PT 104681 A (51) Classificação Internacional: H04L 5/00 (2006.01) (12) FASCÍCULO DE PATENTE DE INVENÇÃO (22) Data de pedido: 2009.07.23 (30) Prioridade(s): (43) Data de publicação
(11) Número de Publicação: PT 104681 A (51) Classificação Internacional: H04L 5/00 (2006.01) (12) FASCÍCULO DE PATENTE DE INVENÇÃO (22) Data de pedido: 2009.07.23 (30) Prioridade(s): (43) Data de publicação
Hardware. Objetivos do Capítulo
 Objetivos do Capítulo Identificar os principais tipos, tendências e usos de microcomputadores, computadores de médio porte e mainframes. Caracterizar as principais tecnologias e usos de periféricos de
Objetivos do Capítulo Identificar os principais tipos, tendências e usos de microcomputadores, computadores de médio porte e mainframes. Caracterizar as principais tecnologias e usos de periféricos de
Unidade 1: O Computador
 Unidade : O Computador.3 Arquitetura básica de um computador O computador é uma máquina que processa informações. É formado por um conjunto de componentes físicos (dispositivos mecânicos, magnéticos, elétricos
Unidade : O Computador.3 Arquitetura básica de um computador O computador é uma máquina que processa informações. É formado por um conjunto de componentes físicos (dispositivos mecânicos, magnéticos, elétricos
Desenho arquitetônico, topográfico e mecânico em programas informatizados de desenho - computer-aided design - CAD.
 Desenho arquitetônico, topográfico e mecânico em programas informatizados de desenho - computer-aided design - CAD. Introdução DESENHO TÉCNICO Desenho preciso - quantidades ou medidas. Desenhista escala
Desenho arquitetônico, topográfico e mecânico em programas informatizados de desenho - computer-aided design - CAD. Introdução DESENHO TÉCNICO Desenho preciso - quantidades ou medidas. Desenhista escala
ASPECTOS CONSTRUTIVOS DE ROBÔS
 ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
ASPECTOS CONSTRUTIVOS DE ROBÔS Tipos de robôs Classificação de robôs Definições importantes: O arranjo das hastes e juntas em um braço manipulador tem um importante efeito nos graus de liberdade da ferramenta
Geografia. Aula 02. Projeções Cartográficas A arte na construção de mapas. 2. Projeções cartográficas
 Geografia. Aula 02 Projeções Cartográficas A arte na construção de mapas 2. Projeções cartográficas 2.1. Como representar figuras tridimensionais em um plano sem que ocorra deformidades? É possível eliminar
Geografia. Aula 02 Projeções Cartográficas A arte na construção de mapas 2. Projeções cartográficas 2.1. Como representar figuras tridimensionais em um plano sem que ocorra deformidades? É possível eliminar
DK105 GROVE. Temperatura e Umidade. Radiuino
 DK105 GROVE Temperatura e Umidade Radiuino O presente projeto visa mostrar uma básica aplicação com o Kit DK 105 Grove. Utilizamos um sensor de umidade e temperatura Grove juntamente ao nó sensor para
DK105 GROVE Temperatura e Umidade Radiuino O presente projeto visa mostrar uma básica aplicação com o Kit DK 105 Grove. Utilizamos um sensor de umidade e temperatura Grove juntamente ao nó sensor para
Acionamento de Motores: PWM e Ponte H
 Warthog Robotics USP São Carlos www.warthog.sc.usp.br warthog@sc.usp.br Acionamento de Motores: PWM e Ponte H Por Gustavo C. Oliveira, Membro da Divisão de Controle (2014) 1 Introdução Motores são máquinas
Warthog Robotics USP São Carlos www.warthog.sc.usp.br warthog@sc.usp.br Acionamento de Motores: PWM e Ponte H Por Gustavo C. Oliveira, Membro da Divisão de Controle (2014) 1 Introdução Motores são máquinas
Qualidade e robustez aparente. Desde 1956 Movimentando Qualidade.
 Qualidade e robustez aparente. Desde 1956 Movimentando Qualidade. Fundada em 1956, a ZELOSO acompanhou o aumento da industrialização do país, com equipamentos hidráulicos para movimentação e força, desenvolvendo
Qualidade e robustez aparente. Desde 1956 Movimentando Qualidade. Fundada em 1956, a ZELOSO acompanhou o aumento da industrialização do país, com equipamentos hidráulicos para movimentação e força, desenvolvendo
1 Circuitos Pneumáticos
 1 Circuitos Pneumáticos Os circuitos pneumáticos são divididos em várias partes distintas e, em cada uma destas divisões, elementos pneumáticos específicos estão posicionados. Estes elementos estão agrupados
1 Circuitos Pneumáticos Os circuitos pneumáticos são divididos em várias partes distintas e, em cada uma destas divisões, elementos pneumáticos específicos estão posicionados. Estes elementos estão agrupados
$9$/,$d 2'$67e&1,&$6$3/,&$'$63$5$0(',5 )(55$0(17$6'(&257(87,/,=$'$61$60È48,1$6&1&
(55$0(17$6'(&257(87,/,=$'$61$60È48,1$6&1&") $9$/,$d 2'$67e&1,&$6$3/,&$'$63$5$0(',5 )(55$0(17$6'(&257(87,/,=$'$61$60È48,1$6&1& &ODXGLPLU-RVp5HEH\ND FODXGLPLU#HQVLQRPV 1HUL9ROSDWR QYROSDWR#FHIHWSUEU 'DOEHUWR'LDVGD&RVWD Universidade Federal do Paraná
$9$/,$d 2'$67e&1,&$6$3/,&$'$63$5$0(',5 )(55$0(17$6'(&257(87,/,=$'$61$60È48,1$6&1& &ODXGLPLU-RVp5HEH\ND FODXGLPLU#HQVLQRPV 1HUL9ROSDWR QYROSDWR#FHIHWSUEU 'DOEHUWR'LDVGD&RVWD Universidade Federal do Paraná
Bons Fluídos. Vida Melhor.
 Bons Fluídos. Vida Melhor. Indústria de Processos BOMBAS E COMPRESSORES CENTRÍFUGOS BOMBAS CENTRÍFUGAS API 610 OH6 As bombas centrífugas SUNDYNE verticais in-line de simples estágio de alta velocidade
Bons Fluídos. Vida Melhor. Indústria de Processos BOMBAS E COMPRESSORES CENTRÍFUGOS BOMBAS CENTRÍFUGAS API 610 OH6 As bombas centrífugas SUNDYNE verticais in-line de simples estágio de alta velocidade
ARTIGO. Sobre monitoramento a Distancia e aplicação automática de medicamentos. Sistema de monitoração a distancia e aplicação de medicamentos.
 ARTIGO Sobre monitoramento a Distancia e aplicação automática de medicamentos. Autor: Marcos José Sanvidotti Sistema de monitoração a distancia e aplicação de medicamentos. Resumo: O monitoramento a distância
ARTIGO Sobre monitoramento a Distancia e aplicação automática de medicamentos. Autor: Marcos José Sanvidotti Sistema de monitoração a distancia e aplicação de medicamentos. Resumo: O monitoramento a distância
0.1 Introdução Conceitos básicos
 Laboratório de Eletricidade S.J.Troise Exp. 0 - Laboratório de eletricidade 0.1 Introdução Conceitos básicos O modelo aceito modernamente para o átomo apresenta o aspecto de uma esfera central chamada
Laboratório de Eletricidade S.J.Troise Exp. 0 - Laboratório de eletricidade 0.1 Introdução Conceitos básicos O modelo aceito modernamente para o átomo apresenta o aspecto de uma esfera central chamada
Direct Drives. Instituto Politécnico de Viseu. Escola Superior de Tecnologia. Departamento de Engenharia Electrotécnica
 Instituto Politécnico de Viseu Escola Superior de Tecnologia Departamento de Engenharia Electrotécnica Direct Drives Vasco Santos - 2006 Pg.1 Motor direct drive 1. Introdução Fig 1. - Direct drive Uma
Instituto Politécnico de Viseu Escola Superior de Tecnologia Departamento de Engenharia Electrotécnica Direct Drives Vasco Santos - 2006 Pg.1 Motor direct drive 1. Introdução Fig 1. - Direct drive Uma
Robótica Industrial. Professor: José Alberto Naves Cocota Júnior. UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30
 Turmas: EE8P30 e EE9P30") Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Robótica Industrial Professor: José Alberto Naves Cocota Júnior UNIP Campus Brasília Curso: Engenharia Elétrica (Eletrônica) Turmas: EE8P30 e EE9P30 Definição de Robô A origem da palavra: robota(checo)
Fundamentos de Transmissão de Dados. Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina: Redes de Computadores I
 Fundamentos de Transmissão de Dados Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina: Redes de Computadores I 2 Fundamentos da Transmissão de Dados Tipos de Transmissão Analógica
Fundamentos de Transmissão de Dados Universidade Católica de Pelotas Curso de Engenharia da Computação Disciplina: Redes de Computadores I 2 Fundamentos da Transmissão de Dados Tipos de Transmissão Analógica
Redes Sem Fio (Wireless) Prof. Fred Sauer. email: fsauer@gmail.com. Redes Sem Fio (Wireless) 1
 Prof. Fred Sauer. email: fsauer@gmail.com. Redes Sem Fio (Wireless) 1") Redes Sem Fio (Wireless) Prof. Fred Sauer email: fsauer@gmail.com Redes Sem Fio (Wireless) 1 Bibliografia Wireless Communication : O Guia Essencial de Comunicação sem Fio (Livro texto) Andy Dornan Editora
Redes Sem Fio (Wireless) Prof. Fred Sauer email: fsauer@gmail.com Redes Sem Fio (Wireless) 1 Bibliografia Wireless Communication : O Guia Essencial de Comunicação sem Fio (Livro texto) Andy Dornan Editora
JUMBO. a solução para construções em aço PORT
 JUMBO a solução para construções em aço PORT Lasertube JUMBO Processo laser para tubos e perfis estruturais de médias e grande dimensões Lasertube JUMBO é o sistema mais inovador presente no mercado,
JUMBO a solução para construções em aço PORT Lasertube JUMBO Processo laser para tubos e perfis estruturais de médias e grande dimensões Lasertube JUMBO é o sistema mais inovador presente no mercado,
Métricas de Software
 Métricas de Software Plácido Antônio de Souza Neto 1 1 Gerência Educacional de Tecnologia da Informação Centro Federal de Educação Tecnologia do Rio Grande do Norte 2006.1 - Planejamento e Gerência de
Métricas de Software Plácido Antônio de Souza Neto 1 1 Gerência Educacional de Tecnologia da Informação Centro Federal de Educação Tecnologia do Rio Grande do Norte 2006.1 - Planejamento e Gerência de
Engrenagens são elementos de máquinas que transmitem o movimento por meio de sucessivos engates de dentes, onde os dentes atuam como pequenas
 Engrenagens Engrenagens são elementos de máquinas que transmitem o movimento por meio de sucessivos engates de dentes, onde os dentes atuam como pequenas alavancas. Classificação das Engrenagens As engrenagens
Engrenagens Engrenagens são elementos de máquinas que transmitem o movimento por meio de sucessivos engates de dentes, onde os dentes atuam como pequenas alavancas. Classificação das Engrenagens As engrenagens
Banco de Dados I. Prof. Edson Thizon ethizon@bol.com.br
 Banco de Dados I Prof. Edson Thizon ethizon@bol.com.br Conceitos Dados Fatos conhecidos que podem ser registrados e que possuem significado implícito Banco de dados (BD) Conjunto de dados interrelacionados
Banco de Dados I Prof. Edson Thizon ethizon@bol.com.br Conceitos Dados Fatos conhecidos que podem ser registrados e que possuem significado implícito Banco de dados (BD) Conjunto de dados interrelacionados
Texto para Coluna do NRE-POLI na Revista Construção e Mercado Pini Setembro 2008. Prof. Dr. João da Rocha Lima Jr.
 Texto para Coluna do NRE-POLI na Revista Construção e Mercado Pini Setembro 2008 COMO FAZER A IDENTIFICAÇÃO DAS VANTAGENS E RISCOS DAS PERMUTAS NOS EMPREENDIMENTOS RESIDENCIAIS Prof. Dr. João da Rocha
Texto para Coluna do NRE-POLI na Revista Construção e Mercado Pini Setembro 2008 COMO FAZER A IDENTIFICAÇÃO DAS VANTAGENS E RISCOS DAS PERMUTAS NOS EMPREENDIMENTOS RESIDENCIAIS Prof. Dr. João da Rocha
(72) Inventor(es): (74) Mandatário: (54) Epígrafe: APLICAÇÃO COMPUTORIZADA PARA O CONTROLO DE ROBOTS INDUSTRIAIS
 Inventor(es): (74) Mandatário: (54) Epígrafe: APLICAÇÃO COMPUTORIZADA PARA O CONTROLO DE ROBOTS INDUSTRIAIS") (11) Número de Publicação: PT 104730 A (51) Classificação Internacional: G05B 19/18 (2006.01) (12) FASCÍCULO DE PATENTE DE INVENÇÃO (22) Data de pedido: 2009.08.31 (30) Prioridade(s): (73) Titular(es):
(11) Número de Publicação: PT 104730 A (51) Classificação Internacional: G05B 19/18 (2006.01) (12) FASCÍCULO DE PATENTE DE INVENÇÃO (22) Data de pedido: 2009.08.31 (30) Prioridade(s): (73) Titular(es):
Flávia Rodrigues. Silves, 26 de Abril de 2010
 Flávia Rodrigues STC5 _ Redes de Informação e Comunicação Silves, 26 de Abril de 2010 Vantagens e Desvantagens da Tecnologia Acessibilidade, quer a nível pessoal quer a nível profissional; Pode-se processar
Flávia Rodrigues STC5 _ Redes de Informação e Comunicação Silves, 26 de Abril de 2010 Vantagens e Desvantagens da Tecnologia Acessibilidade, quer a nível pessoal quer a nível profissional; Pode-se processar
Processamento de Dados aplicado à Geociências. AULA 1: Introdução à Arquitetura de Computadores
 1 Processamento de Dados aplicado à Geociências AULA 1: Introdução à Arquitetura de Computadores UNIVERSIDADE FEDERAL DE PELOTAS CENTRO DE DESENVOLVIMENTO TECNOLÓGICO CURSO SUPERIOR DE TECNOLOGIA EM GEOPROCESSAMENTO
1 Processamento de Dados aplicado à Geociências AULA 1: Introdução à Arquitetura de Computadores UNIVERSIDADE FEDERAL DE PELOTAS CENTRO DE DESENVOLVIMENTO TECNOLÓGICO CURSO SUPERIOR DE TECNOLOGIA EM GEOPROCESSAMENTO
Engenharia de Software II
 Engenharia de Software II Aula 26 http://www.ic.uff.br/~bianca/engsoft2/ Aula 26-21/07/2006 1 Ementa Processos de desenvolvimento de software Estratégias e técnicas de teste de software Métricas para software
Engenharia de Software II Aula 26 http://www.ic.uff.br/~bianca/engsoft2/ Aula 26-21/07/2006 1 Ementa Processos de desenvolvimento de software Estratégias e técnicas de teste de software Métricas para software
Fundamentos dos Processos de Usinagem. Prof. Dr. Eng. Rodrigo Lima Stoeterau
 Fundamentos dos Processos de Usinagem Prof. Dr. Eng. Rodrigo Lima Stoeterau Destribuição do tópico usinagem na disciplina PMR 2202 Aula 01 - Fundamentos da usinagem Aula 02 - Processos de Usinagem com
Fundamentos dos Processos de Usinagem Prof. Dr. Eng. Rodrigo Lima Stoeterau Destribuição do tópico usinagem na disciplina PMR 2202 Aula 01 - Fundamentos da usinagem Aula 02 - Processos de Usinagem com
MANUAL DE INSTRUÇÕES DE FUN- CIONAMENTO (Tradução) Plataforma elevadora Tipo 1097.0,75 1097.1,25 8718.0,2
 Plataforma elevadora Tipo 1097.0,75 1097.1,25 8718.0,2") MANUAL DE INSTRUÇÕES DE FUN- CIONAMENTO (Tradução) Plataforma elevadora Tipo 1097.0,75 1097.1,25 8718.0,2 PT 1. Grupos de utilizadores Tarefas Qualificação Operador Operação, verificação visual Instrução
MANUAL DE INSTRUÇÕES DE FUN- CIONAMENTO (Tradução) Plataforma elevadora Tipo 1097.0,75 1097.1,25 8718.0,2 PT 1. Grupos de utilizadores Tarefas Qualificação Operador Operação, verificação visual Instrução
Introdução. Hardware (Parte III) Universidade Federal de Campina Grande Departamento de Sistemas e Computação. joseana@computacao.ufcg.edu.
 Universidade Federal de Campina Grande Departamento de Sistemas e Computação. joseana@computacao.ufcg.edu.") Universidade Federal de Campina Grande Departamento de Sistemas e Computação Introdução à Computação Hardware (Parte III) Prof. a Joseana Macêdo Fechine Régis de Araújo joseana@computacao.ufcg.edu.br Carga
Universidade Federal de Campina Grande Departamento de Sistemas e Computação Introdução à Computação Hardware (Parte III) Prof. a Joseana Macêdo Fechine Régis de Araújo joseana@computacao.ufcg.edu.br Carga
Telecomunicação e Redes
 Telecomunicação e Redes Gleidson Emanuel Engª. Mecânica Izaac Damasceno Engª. Agrícola e Ambiental Jadson Patrick Engª. Agrícola e Ambiental Sergio Santos Engª. Agrícola e Ambiental DEFINIÇÃO (Telecomunicação)
Telecomunicação e Redes Gleidson Emanuel Engª. Mecânica Izaac Damasceno Engª. Agrícola e Ambiental Jadson Patrick Engª. Agrícola e Ambiental Sergio Santos Engª. Agrícola e Ambiental DEFINIÇÃO (Telecomunicação)
Simplicidade aliada à competência
 Simplicidade aliada à competência Operação simples, fácil instalação e baixo custo SINAMICS G110 Answers for industry. 1 SINAMICS G110 Simples instalação e fácil comissionamento Compacto por fora... Fácil
Simplicidade aliada à competência Operação simples, fácil instalação e baixo custo SINAMICS G110 Answers for industry. 1 SINAMICS G110 Simples instalação e fácil comissionamento Compacto por fora... Fácil
Lista de Exercícios 1
 Conceitos envolvidos: a) Memória de Dados (interna e externa) b) Memória de Programa (interna e externa) c) Operações aritméticas e lógicas d) Portas e) Endereçamento a Bit f) Contadores e Temporizadores
Conceitos envolvidos: a) Memória de Dados (interna e externa) b) Memória de Programa (interna e externa) c) Operações aritméticas e lógicas d) Portas e) Endereçamento a Bit f) Contadores e Temporizadores
CONTROLE NUMÉRICO E AUTOMATIZAÇÃO INDUSTRIAL INTRODUÇÃO: NOÇÕES BÁSICAS DE CNC
 CONTROLE NUMÉRICO E AUTOMATIZAÇÃO INDUSTRIAL INTRODUÇÃO: NOÇÕES BÁSICAS DE CNC Operador de máquinas convencionais Materiais recebidos pelo operador da Máquina Convencional Exemplo de Máquina Convencional
CONTROLE NUMÉRICO E AUTOMATIZAÇÃO INDUSTRIAL INTRODUÇÃO: NOÇÕES BÁSICAS DE CNC Operador de máquinas convencionais Materiais recebidos pelo operador da Máquina Convencional Exemplo de Máquina Convencional
TORNEIRO MECÂNICO OPERAÇÃO
 DEFINIÇÃO: TORNEIRO MECÂNICO OPERAÇÃO ABRIR ROSCA MÚLTIPLA (EXTERNA E INTERNA) É abrir rosca na superfície externa ou interna do material, através de um sistema de divisões de avanço da ferramenta, que
DEFINIÇÃO: TORNEIRO MECÂNICO OPERAÇÃO ABRIR ROSCA MÚLTIPLA (EXTERNA E INTERNA) É abrir rosca na superfície externa ou interna do material, através de um sistema de divisões de avanço da ferramenta, que
Sistemas Operacionais
 Sistemas Operacionais Artur Petean Bove Junior Mercado e Tecnologias futuras ETEP Faculdades Sistema operacional é o software responsável pela criação do ambiente de trabalho da máquina. Sendo a camada
Sistemas Operacionais Artur Petean Bove Junior Mercado e Tecnologias futuras ETEP Faculdades Sistema operacional é o software responsável pela criação do ambiente de trabalho da máquina. Sendo a camada
ATIVIDADE DE FÍSICA PARA AS FÉRIAS 8. o A/B PROF. A GRAZIELA
 ATIVIDADE DE FÍSICA PARA AS FÉRIAS 8. o A/B PROF. A GRAZIELA QUESTÃO 1) Utilize as informações do texto abaixo para responder às questões que o seguem. Uma máquina simples para bombear água: A RODA D ÁGUA
ATIVIDADE DE FÍSICA PARA AS FÉRIAS 8. o A/B PROF. A GRAZIELA QUESTÃO 1) Utilize as informações do texto abaixo para responder às questões que o seguem. Uma máquina simples para bombear água: A RODA D ÁGUA
TECNOLOGIA DE CONTROLE NUMÉRICO PROGRAMAÇÃO CNC
 TECNOLOGIA DE CONTROLE NUMÉRICO PROGRAMAÇÃO CNC Preços de Alguns Softwares Comerciais de CAD/CAM Operações de Torneamento Eixos de um Torno CNC Área de Trabalho de Torno CNC Zero Máquina e Zero Peça Pontos
TECNOLOGIA DE CONTROLE NUMÉRICO PROGRAMAÇÃO CNC Preços de Alguns Softwares Comerciais de CAD/CAM Operações de Torneamento Eixos de um Torno CNC Área de Trabalho de Torno CNC Zero Máquina e Zero Peça Pontos
REGULAMENTO DA POLÍTICA DE MANUTENÇÃO E GUARDA DO ACERVO ACADÊMICO DA ESCOLA DE DIREITO DE BRASÍLIA EDB
 REGULAMENTO DA POLÍTICA DE MANUTENÇÃO E GUARDA DO ACERVO ACADÊMICO DA ESCOLA DE DIREITO DE BRASÍLIA EDB Estabelece a Política para Manutenção e Guarda do Acervo Acadêmico da Escola de Direito de Brasília
REGULAMENTO DA POLÍTICA DE MANUTENÇÃO E GUARDA DO ACERVO ACADÊMICO DA ESCOLA DE DIREITO DE BRASÍLIA EDB Estabelece a Política para Manutenção e Guarda do Acervo Acadêmico da Escola de Direito de Brasília
Fundamentos de Programação. Diagrama de blocos
 Fundamentos de Programação Diagrama de blocos Prof. M.Sc.: João Paulo Q. dos Santos E-mail: joao.queiroz@ifrn.edu.br Página: http://docente.ifrn.edu.br/joaoqueiroz/ O processo de desenvolvimento (programação),
Fundamentos de Programação Diagrama de blocos Prof. M.Sc.: João Paulo Q. dos Santos E-mail: joao.queiroz@ifrn.edu.br Página: http://docente.ifrn.edu.br/joaoqueiroz/ O processo de desenvolvimento (programação),
Arquitetura e Organização de Computadores. Histórico. Gerações
 Histórico Gerações 00001 As gerações dos computadores Os computadores são máquinas capazes de realizar vários cálculos automaticamente, além de possuir dispositivos de armazenamento e de entrada e saída.
Histórico Gerações 00001 As gerações dos computadores Os computadores são máquinas capazes de realizar vários cálculos automaticamente, além de possuir dispositivos de armazenamento e de entrada e saída.
Prof. Daniel Gondim danielgondimm@gmail.com. Informática
 Prof. Daniel Gondim danielgondimm@gmail.com Informática Componentes de um SC Entrada e Saída Entrada e saída visão do usuário Usuários submetem dados (entrada) ao computador para obter informação (saída)
Prof. Daniel Gondim danielgondimm@gmail.com Informática Componentes de um SC Entrada e Saída Entrada e saída visão do usuário Usuários submetem dados (entrada) ao computador para obter informação (saída)
Microprocessadores. Memórias
 s António M. Gonçalves Pinheiro Departamento de Física Covilhã - Portugal pinheiro@ubi.pt Arquitectura de Microcomputador Modelo de Von Neumann Barramento de Endereços µprocessador Entrada/Saída Barramento
s António M. Gonçalves Pinheiro Departamento de Física Covilhã - Portugal pinheiro@ubi.pt Arquitectura de Microcomputador Modelo de Von Neumann Barramento de Endereços µprocessador Entrada/Saída Barramento
OBJETIVOS DA SEÇÃO. Após concluir com êxito o módulo sobre Área de Trabalho, o aluno deve estar apto a:
 OBJETIVOS DA SEÇÃO Após concluir com êxito o módulo sobre Área de Trabalho, o aluno deve estar apto a: I. Definir os critérios da Área de Trabalho para o Sistema de Cabeamento Siemon, tanto para interfaces
OBJETIVOS DA SEÇÃO Após concluir com êxito o módulo sobre Área de Trabalho, o aluno deve estar apto a: I. Definir os critérios da Área de Trabalho para o Sistema de Cabeamento Siemon, tanto para interfaces
Introdução. Aula 02. Estrutura de Dados II. UFS - DComp Adaptados a partir do material da Profa. Kenia Kodel Cox
 Introdução Estrutura de Dados II Aula 02 UFS - DComp Adaptados a partir do material da Profa. Kenia Kodel Cox 1 Estrutura de Dados estuda o que? 2 A programação habilita os computadores a cumprirem imensa
Introdução Estrutura de Dados II Aula 02 UFS - DComp Adaptados a partir do material da Profa. Kenia Kodel Cox 1 Estrutura de Dados estuda o que? 2 A programação habilita os computadores a cumprirem imensa
Modelagem De Sistemas
 Modelagem De Sistemas UNIP Tatuapé - SP Aplicações em Linguagem de Programação Prof.Marcelo Nogueira Uma empresa de software de sucesso é aquela que consistentemente produz software de qualidade que vai
Modelagem De Sistemas UNIP Tatuapé - SP Aplicações em Linguagem de Programação Prof.Marcelo Nogueira Uma empresa de software de sucesso é aquela que consistentemente produz software de qualidade que vai
LAVANDERIAS COMERCIAIS. Controles Quantum
 LAVANDERIAS COMERCIAIS Controles Quantum RELATÓRIOS DE LOJA E DE RECEITAS O Quantum Gold monitora o seu equipamento para fornecer relatórios detalhados. Ao fornecer uma visão abrangente das especificações
LAVANDERIAS COMERCIAIS Controles Quantum RELATÓRIOS DE LOJA E DE RECEITAS O Quantum Gold monitora o seu equipamento para fornecer relatórios detalhados. Ao fornecer uma visão abrangente das especificações
MAGI PORTA - PORTAS AUTOMÁTICAS
 MAGI PORTA - PORTAS AUTOMÁTICAS LINHA SOCIAL A SOLUÇÃO PERFEITA EM PORTAS AUTOMÁTICAS TECNOLOGIA A Magi Porta já consolidada no mercado de portas automáticas, mais uma vez inova o conceito de portas sociais
MAGI PORTA - PORTAS AUTOMÁTICAS LINHA SOCIAL A SOLUÇÃO PERFEITA EM PORTAS AUTOMÁTICAS TECNOLOGIA A Magi Porta já consolidada no mercado de portas automáticas, mais uma vez inova o conceito de portas sociais
CATRACA LED PEDESTAL Características
 No CATRACA LED PEDESTAL Características Design inovador e requintado para os mais diversos ambientes; Novo sistema de acesso aos componentes eletrônicos direto na tampa, de fácil acesso; Novo sistema de
No CATRACA LED PEDESTAL Características Design inovador e requintado para os mais diversos ambientes; Novo sistema de acesso aos componentes eletrônicos direto na tampa, de fácil acesso; Novo sistema de
Conteúdo programático por disciplina Matemática 6 o ano
 60 Conteúdo programático por disciplina Matemática 6 o ano Caderno 1 UNIDADE 1 Significados das operações (adição e subtração) Capítulo 1 Números naturais O uso dos números naturais Seqüência dos números
60 Conteúdo programático por disciplina Matemática 6 o ano Caderno 1 UNIDADE 1 Significados das operações (adição e subtração) Capítulo 1 Números naturais O uso dos números naturais Seqüência dos números
Arquitecturas de Software Enunciado de Projecto 2007 2008
 UNIVERSIDADE TÉCNICA DE LISBOA INSTITUTO SUPERIOR TÉCNICO Arquitecturas de Software Enunciado de Projecto 2007 2008 1 Introdução Na primeira metade da década de 90 começaram a ser desenvolvidas as primeiras
UNIVERSIDADE TÉCNICA DE LISBOA INSTITUTO SUPERIOR TÉCNICO Arquitecturas de Software Enunciado de Projecto 2007 2008 1 Introdução Na primeira metade da década de 90 começaram a ser desenvolvidas as primeiras
Adriana da Silva Santi Coord. Pedagógica de Matemática SMED - Abril/2015
 GEOMETRIA Adriana da Silva Santi Coord. Pedagógica de Matemática SMED - Abril/2015 O MATERIAL COMO SUPORTE DO PENSAMENTO Muita gente usa o material na sala de aula como se a Geometria estivesse no material.
GEOMETRIA Adriana da Silva Santi Coord. Pedagógica de Matemática SMED - Abril/2015 O MATERIAL COMO SUPORTE DO PENSAMENTO Muita gente usa o material na sala de aula como se a Geometria estivesse no material.
Introdução. Modelo de um Sistema de Comunicação
 I 1 Comunicação de Dados e Redes de Computadores Introdução FEUP/DEEC/CDRC I 2002/03 MPR/JAR Modelo de um Sistema de Comunicação» Fonte gera a informação (dados) a transmitir» Emissor converte os dados
I 1 Comunicação de Dados e Redes de Computadores Introdução FEUP/DEEC/CDRC I 2002/03 MPR/JAR Modelo de um Sistema de Comunicação» Fonte gera a informação (dados) a transmitir» Emissor converte os dados
Representação de rugosidade
 Representação de rugosidade A UU L AL A Existem vários tipos de superfície de peças. Qual o melhor meio para identificar rapidamente cada um desses tipos e o estado das superfícies? Essa questão foi resolvida
Representação de rugosidade A UU L AL A Existem vários tipos de superfície de peças. Qual o melhor meio para identificar rapidamente cada um desses tipos e o estado das superfícies? Essa questão foi resolvida
Tema 4 Controlo de Fontes de Energia em Veículos Eléctricos. Orientador: Prof. Dr. Paulo José Gameiro Pereirinha
 Fundação para a Ciência e Tecnologia Tema 4 Controlo de Fontes de Energia em Veículos Eléctricos Instituto de Engenharia de Sistemas e Computadores de Coimbra Orientador: Prof. Dr. Paulo José Gameiro Pereirinha
Fundação para a Ciência e Tecnologia Tema 4 Controlo de Fontes de Energia em Veículos Eléctricos Instituto de Engenharia de Sistemas e Computadores de Coimbra Orientador: Prof. Dr. Paulo José Gameiro Pereirinha
Tecnologia da Construção Civil - I Fundações. Roberto dos Santos Monteiro
 Tecnologia da Construção Civil - I Fundações Após a execução da sondagem, iremos definir qual o tipo de fundação mais adequada a ser utilizado no nosso empreendimento. As Fundações são elementos estruturais
Tecnologia da Construção Civil - I Fundações Após a execução da sondagem, iremos definir qual o tipo de fundação mais adequada a ser utilizado no nosso empreendimento. As Fundações são elementos estruturais
Sefaz Virtual Ambiente Nacional Projeto Nota Fiscal Eletrônica
 Projeto Nota Fiscal Eletrônica Orientações de Utilização do Sefaz Virtual Ambiente Nacional para as Empresas Versão 1.0 Fevereiro 2008 1 Sumário: 1. Introdução... 3 2. O que é o Sefaz Virtual... 4 3. Benefícios
Projeto Nota Fiscal Eletrônica Orientações de Utilização do Sefaz Virtual Ambiente Nacional para as Empresas Versão 1.0 Fevereiro 2008 1 Sumário: 1. Introdução... 3 2. O que é o Sefaz Virtual... 4 3. Benefícios
Introdução à Informática. Aula 05. Redes de Computadores. Prof. Fábio Nelson
 Aula 05 Redes de Computadores Sistemas de Comunicação de Dados Sistemas computadorizados que transmitem dados por meio de linhas de comunicação, como, por exemplo, linhas telefônicas ou cabos. História:
Aula 05 Redes de Computadores Sistemas de Comunicação de Dados Sistemas computadorizados que transmitem dados por meio de linhas de comunicação, como, por exemplo, linhas telefônicas ou cabos. História:
Apresentação dos Requisitos Do Edital Inmetro nº 01/2011
 Apresentação dos Requisitos Do Edital Inmetro nº 01/2011 Anexo B Especificações do simulador Eduardo Lopes Pesquisador-Tecnologista em Metrologia e Qualidade Objetivos Apresentar o simulador de pista com
Apresentação dos Requisitos Do Edital Inmetro nº 01/2011 Anexo B Especificações do simulador Eduardo Lopes Pesquisador-Tecnologista em Metrologia e Qualidade Objetivos Apresentar o simulador de pista com
Comandos de Eletropneumática Exercícios Comentados para Elaboração, Montagem e Ensaios
 Comandos de Eletropneumática Exercícios Comentados para Elaboração, Montagem e Ensaios O Método Intuitivo de elaboração de circuitos: As técnicas de elaboração de circuitos eletropneumáticos fazem parte
Comandos de Eletropneumática Exercícios Comentados para Elaboração, Montagem e Ensaios O Método Intuitivo de elaboração de circuitos: As técnicas de elaboração de circuitos eletropneumáticos fazem parte
Conteúdo programático
 Introdução à Linguagem C Conteúdo programático Introdução à Linguagem C Estrutura de Programas Variáveis, Constantes Operadores, Entrada e Saída de Dados Estruturas de Desvio Estrutura de Múltipla Escolha
Introdução à Linguagem C Conteúdo programático Introdução à Linguagem C Estrutura de Programas Variáveis, Constantes Operadores, Entrada e Saída de Dados Estruturas de Desvio Estrutura de Múltipla Escolha
Qualidade e confiança para um diagnóstico preciso. Compacto Plus DR Equipamento de radiografia digital. Catálogo Comercial
 Qualidade e confiança para um diagnóstico preciso Compacto Plus DR Equipamento de radiografia digital Catálogo Comercial Tecnologia digital a serviço d Philips, sempre surpreendendo positivamente seus
Qualidade e confiança para um diagnóstico preciso Compacto Plus DR Equipamento de radiografia digital Catálogo Comercial Tecnologia digital a serviço d Philips, sempre surpreendendo positivamente seus
Curso de Engenharia de Produção. Organização do Trabalho na Produção
 Curso de Engenharia de Produção Organização do Trabalho na Produção Estrutura Organizacional Organização da Empresa: É a ordenação e agrupamento de atividades e recursos, visando ao alcance dos objetivos
Curso de Engenharia de Produção Organização do Trabalho na Produção Estrutura Organizacional Organização da Empresa: É a ordenação e agrupamento de atividades e recursos, visando ao alcance dos objetivos
Graduação Tecnológica em Redes de Computadores. Fundamentos de Redes II
 Graduação Tecnológica em Redes de Computadores Fundamentos de Redes II Euber Chaia Cotta e Silva euberchaia@yahoo.com.br Site da disciplina http://echaia.com Ementa: Camada física do modelo OSI; Camada
Graduação Tecnológica em Redes de Computadores Fundamentos de Redes II Euber Chaia Cotta e Silva euberchaia@yahoo.com.br Site da disciplina http://echaia.com Ementa: Camada física do modelo OSI; Camada
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Escola Politécnica - Departamento de Engenharia Mecânica
 UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Escola Politécnica - Departamento de Engenharia Mecânica Curso Lato Sensu MECATRÔNICA Módulo Robótica - AULA 6: Exercício Prático Prof. Vitor Ferreira Romano 1. ASPECTOS
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO Escola Politécnica - Departamento de Engenharia Mecânica Curso Lato Sensu MECATRÔNICA Módulo Robótica - AULA 6: Exercício Prático Prof. Vitor Ferreira Romano 1. ASPECTOS
Plataformas Montele Pioneira em Acessibilidade No Brasil
 Plataformas Montele Pioneira em Acessibilidade No Brasil Plataformas Montele PL 220 e PL 240 PIONEIRA EM ACESSIBILIDADE NO BRASIL Fundada em 1982, a Montele é pioneira na fabricacão de elevadores e plataformas
Plataformas Montele Pioneira em Acessibilidade No Brasil Plataformas Montele PL 220 e PL 240 PIONEIRA EM ACESSIBILIDADE NO BRASIL Fundada em 1982, a Montele é pioneira na fabricacão de elevadores e plataformas
SISTEMAS DISTRIBUÍDOS
 SISTEMAS DISTRIBUÍDOS Introdução Slide 1 Nielsen C. Damasceno Introdução Tanenbaum (2007) definiu que um sistema distribuído é aquele que se apresenta aos seus usuários como um sistema centralizado, mas
SISTEMAS DISTRIBUÍDOS Introdução Slide 1 Nielsen C. Damasceno Introdução Tanenbaum (2007) definiu que um sistema distribuído é aquele que se apresenta aos seus usuários como um sistema centralizado, mas
Aparelhos de localização
 Aparelhos de localização Três em cada cinco pessoas com demência desaparecem em algum momento, muitas vezes sem aviso. Não é fácil garantir simultaneamente independência e segurança. Um desaparecimento
Aparelhos de localização Três em cada cinco pessoas com demência desaparecem em algum momento, muitas vezes sem aviso. Não é fácil garantir simultaneamente independência e segurança. Um desaparecimento
Resolução da Lista de Exercício 6
 Teoria da Organização e Contratos - TOC / MFEE Professor: Jefferson Bertolai Fundação Getulio Vargas / EPGE Monitor: William Michon Jr 10 de novembro de 01 Exercícios referentes à aula 7 e 8. Resolução
Teoria da Organização e Contratos - TOC / MFEE Professor: Jefferson Bertolai Fundação Getulio Vargas / EPGE Monitor: William Michon Jr 10 de novembro de 01 Exercícios referentes à aula 7 e 8. Resolução
Álgebra Linear Aplicada à Compressão de Imagens. Universidade de Lisboa Instituto Superior Técnico. Mestrado em Engenharia Aeroespacial
 Álgebra Linear Aplicada à Compressão de Imagens Universidade de Lisboa Instituto Superior Técnico Uma Breve Introdução Mestrado em Engenharia Aeroespacial Marília Matos Nº 80889 2014/2015 - Professor Paulo
Álgebra Linear Aplicada à Compressão de Imagens Universidade de Lisboa Instituto Superior Técnico Uma Breve Introdução Mestrado em Engenharia Aeroespacial Marília Matos Nº 80889 2014/2015 - Professor Paulo
Técnico em Radiologia. Prof.: Edson Wanderley
 Técnico em Radiologia Prof.: Edson Wanderley Rede de Computadores Modelo Mainframe Terminal Computador de grande porte centralizado; Os recursos do computador central, denominada mainframe são compartilhadas
Técnico em Radiologia Prof.: Edson Wanderley Rede de Computadores Modelo Mainframe Terminal Computador de grande porte centralizado; Os recursos do computador central, denominada mainframe são compartilhadas
Parte 2 Programação Manual de Centro de Usinagem CNC
 Universidade Federal de Itajubá - UNIFEI Instituto de Engenharia de Produção e Gestão (IEPG) EME005 Tecnologia de Fabricação IV Parte 2 Programação Manual de Centro de Usinagem CNC Prof. José Hamilton
Universidade Federal de Itajubá - UNIFEI Instituto de Engenharia de Produção e Gestão (IEPG) EME005 Tecnologia de Fabricação IV Parte 2 Programação Manual de Centro de Usinagem CNC Prof. José Hamilton
Laboratório Virtual de Sistema de Controle Via Web em Labview. 1/6 www.ni.com
 Laboratório Virtual de Sistema de Controle Via Web em Labview "Utilizou-se o Labview 8.6 para criar a VI, uma placa de aquisição da NI e uma webcam para poder acessar e visualizar a planta." - Fernando
Laboratório Virtual de Sistema de Controle Via Web em Labview "Utilizou-se o Labview 8.6 para criar a VI, uma placa de aquisição da NI e uma webcam para poder acessar e visualizar a planta." - Fernando
Durabilidade, Força e Confiabilidade.
 DO BRASIL Durabilidade, Força e Confiabilidade. BLAUTH DO BRASIL é uma empresa genuinamente brasileira, produz exclusivamente prensas excêntricas que são destinadas à produção nos setores de: eletrodomésticos,
DO BRASIL Durabilidade, Força e Confiabilidade. BLAUTH DO BRASIL é uma empresa genuinamente brasileira, produz exclusivamente prensas excêntricas que são destinadas à produção nos setores de: eletrodomésticos,
Deswik.Sched. Sequenciamento por Gráfico de Gantt
 Deswik.Sched Sequenciamento por Gráfico de Gantt SOLUÇÕES EM SEQUENCIAMENTO DE LAVRA QUE NOS DIFERENCIAM Uma abordagem dinâmica e moderna para o sequenciamento de lavra Desde gráficos de Gantt interativos
Deswik.Sched Sequenciamento por Gráfico de Gantt SOLUÇÕES EM SEQUENCIAMENTO DE LAVRA QUE NOS DIFERENCIAM Uma abordagem dinâmica e moderna para o sequenciamento de lavra Desde gráficos de Gantt interativos
Fresando engrenagens cônicas com dentes retos
 A U A UL LA Fresando engrenagens cônicas com dentes retos Na aula passada, você aprendeu a fresar engrenagens cilíndricas com dentes helicoidais, utilizando a grade de engrenagens. Nesta aula você vai
A U A UL LA Fresando engrenagens cônicas com dentes retos Na aula passada, você aprendeu a fresar engrenagens cilíndricas com dentes helicoidais, utilizando a grade de engrenagens. Nesta aula você vai
3.2. Bibliotecas. Biblioteca Professor Antônio Rodolpho Assenço, campus Asa Sul: Os espaços estão distribuídos da seguinte forma:
 1 3.2. Bibliotecas Contam as Faculdades UPIS com a Biblioteca Professor Antônio Rodolpho Assenço e a Biblioteca do Campus II, que atuam como centros dinâmicos de informação, atendendo o corpo docente e
1 3.2. Bibliotecas Contam as Faculdades UPIS com a Biblioteca Professor Antônio Rodolpho Assenço e a Biblioteca do Campus II, que atuam como centros dinâmicos de informação, atendendo o corpo docente e
Supervisório Remoto aplicado em Dispositivo Móvel na Plataforma NI LabVIEW
 Supervisório Remoto aplicado em Dispositivo Móvel na Plataforma NI LabVIEW "Este artigo demonstra os recursos e passos necessários para implementar um sistema supervisório de consumo energético e controle
Supervisório Remoto aplicado em Dispositivo Móvel na Plataforma NI LabVIEW "Este artigo demonstra os recursos e passos necessários para implementar um sistema supervisório de consumo energético e controle