ROS Robot Operating System. Diones Fischer Felipe Almeida Luan Silveira Matheus Longaray Silvia S. C. Botelho
|
|
|
- Maria da Assunção Capistrano de Oliveira
- 8 Há anos
- Visualizações:
Transcrição

1 ROS Robot Operating System Diones Fischer Felipe Almeida Luan Silveira Matheus Longaray Silvia S. C. Botelho

2 Introdução Dificuldades na criação de softwares robóticos: Cada robô possui um protocolo de comunicação Cada câmera captura a imagem em um formato diferente Como rodar os vários sensores em computadores diferentes? Como gerenciar a comunicação entre eles? Cada novo sistema deve ser implementado do zero?

3 O que é ROS? ROS = Robot Operating System Plataforma Distribuída Provê abstrações na troca de mensagens Drivers para dispositivos Manipulação de arquivos

 Gentoo Android Debian Arch Linux OpenSUSE")
4 Onde eu posso rodar o ROS? Suportado: Ubuntu e anteriores. Experimental: OS X (Homebrew) Gentoo Android Debian Arch Linux OpenSUSE Fedora Windows

5 Distribuições do ROS ROS Box Turtle, released March 2, 2010 ROS C Turtle, released August 2, 2010 ROS Diamondback, released March 2, 2011 ROS Electric Emys, released August 30, 2011 ROS Fuerte Turtle, released April 23, 2012

6 Como é organizado o ROS? Packages: Manifest: Entidade de mais baixo nível na organização do software ROS. Pode conter bibliotecas, ferramentas, executáveis, etc. É a descrição de um pacote. Sua função mais importante é definir dependências entre pacotes. Stack: Coleção de pacotes, que formam uma biblioteca de mais alto nível. Stack Manifest: Igual ao manifesto de um package, para descrever uma stack.

7 Sistema de arquivos do ROS

8 Conceitos Básicos - Nodo Qualquer executável que utilize o framework ROS. Nodo 1 Nodo 3 roscore Nodo 2 Nodo 4

9 Conceitos Básicos - Tópico Mecanismo para troca de mensagens entre os nodos Subscriber Publisher Tópico Modelo Publisher/Subscriber Ex. Distribuição da imagem de uma câmera Subscriber Subscriber

10 Conceitos Básicos - Tópico Mecanismo para troca de mensagens entre os nodos Subscriber Publisher Tópico Subscriber Subscriber Nodos

11 Conceitos Básicos - Serviço Mecanismo para requisição e resposta Requisição Cliente Service Servidor Resposta Modelo Cliente/Servidor Ex. Um nodo precisa saber a hora em um servidor central

12 Conceitos Básicos - Serviço Mecanismo para requisição e resposta Requisição Cliente Service Servidor Resposta Nodos

13 Mensagens ROS Meio de comunicação do ROS Todas as mensagens são definidas em arquivos de texto Suporta: Dados primitivos (int, float, strings) Outras mensagens anteriormente definidas Array de dados

14 Tipos de Mensagens do ROS GridCells Odometry Image LaserScan PointCloud PoseArray Polygon E mais...


15 Mensagens ROS

16 Comandos ROS roscore É o núcleo do ROS Gerencia a comunicação entre os nodos Ex.: roscore -p 1234 roslaunch Ferramenta para lançar nodos Inicia roscore automaticamente Ex.: roslaunch <package> file.launch

17 Comandos ROS roscreate-pkg Cria novo diretório do pacote Inclui automaticamente arquivos build e manifest Ex.: roscreate-pkg <package> depend1 depend2 (roscreate-pkg turtlesim roscpp std_msgs...) rosdep Instala dependências de um pacote Ex.: rosdep <package> (rosdep turtlesim )
 rosdep Instala dependências de um pacote Ex.")
18 Comandos ROS rosmake Utilizado para compilar um pacote Ex.: rosmake <package> (rosmake turtlesim ) rosrun Utilizado para executar um nodo Ex.: rosrun <package> <nodo> (rosrun turtlesim turtlesim_node )

19 Comandos ROS roscd Utilizado para navegar no sistema de arquivos Ex.: roscd <filename> (roscd turtlesim) rosls Utilizado para listar os arquivos de um diretório Ex.: rosls <filename> (rosls turtlesim)

20 Comandos ROS rostopic Divulga informações sobre tópicos disponíveis Diversidade de comandos echo: mostra mensagens de um tópico Ex.: rostopic echo /topic_name list: lista todos tópicos disponíveis Ex.: rostopic list pub: publica mensagem no tópico Ex.: rostopic pub -r 10 /topic_name std_msgs/string Hello info: mostra informações de um tópico Ex.: rostopic info /topic_name


21 Executando um exemplo Em um terminal, execute o roscore: roscore Em outro terminal, vamos compilar e executar o pacote turtlesim: rosmake turtlesim rosrun turtlesim turtlesim_node Em um novo terminal, execute o nodo responsável pelo controle da tartaruga. rosrun turtlesim turtle_teleop_key O último terminal permite mover a tartaruga utilizando as setas direcionais
22 Criando um Publisher/Subscriber Em um terminal, crie um pacote: roscreate-pkg tutorial_ros roscpp std_msgs Vá para o diretório do pacote, digitando: roscd tutorial_ros
23 Criando um Publisher/Subscriber talker.cpp #include "ros/ros.h" #include "std_msgs/string.h" #include <string> int main(int argc, char **argv){ ros::init(argc, argv, "talker"); ros::nodehandle n; ros::publisher chatter_pub = n.advertise<std_msgs::string>("chatter", 1000); ros::rate loop_rate(10); std_msgs::string msg; msg.data = std::string("hello World"); while(ros::ok()){ chatter_pub.publish(msg); ros::spinonce(); loop_rate.sleep(); } return 0; }
24 Criando um Publisher/Subscriber talker.cpp #include "ros/ros.h" #include "std_msgs/string.h" #include <string> Inicialização do ROS, com o nome do nodo int main(int argc, char **argv){ Criação do tópico chatter, para envio de mensagens ros::init(argc, argv, "talker"); ros::nodehandle n; ros::publisher chatter_pub = n.advertise<std_msgs::string>("chatter", 1000); ros::rate loop_rate(10); std_msgs::string msg; msg.data = std::string("hello World"); Criação da mensagem Publicação da mensagem while(ros::ok()){ chatter_pub.publish(msg); ros::spinonce(); loop_rate.sleep(); } return 0; } Controle da taxa de envio
25 Criando um Publisher/Subscriber listener.cpp #include "ros/ros.h" #include "std_msgs/string.h" void chattercallback(const std_msgs::string::constptr& msg) { ROS_INFO("I heard: [%s]", msg->data.c_str()); } int main(int argc, char **argv){ ros::init(argc, argv, "listener"); ros::nodehandle n; ros::subscriber sub = n.subscribe("chatter", 1000,chatterCallback); ros::spin(); return 0; }
26 Criando um Publisher/Subscriber listener.cpp #include "ros/ros.h" #include "std_msgs/string.h" Função callback para tratamento das mensagens recebidas void chattercallback(const std_msgs::string::constptr& msg) { ROS_INFO("I heard: [%s]", msg->data.c_str()); } int main(int argc, char **argv){ Inicialização do ROS, com o nome do nodo ros::init(argc, argv, "listener"); ros::nodehandle n; ros::subscriber sub = n.subscribe("chatter", 1000,chatterCallback); ros::spin(); return 0; } Inscrição no tópico chatter. A partir de agora o nodo irá receber todas as mensagens enviadas para esse tópico. Entra em loop, aguardando mensagens
27 Criando um Publisher/Subscriber Com qualquer editor de texto, abra o arquivo CMakeLists.txt. Adicione as seguintes linhas: rosbuild_add_executable(talker src/talker.cpp) rosbuild_add_executable(listener src/listener.cpp) Compile o pacote, digitando: rosmake tutorial_ros
28 Criando um Publisher/Subscriber Execute o roscore: roscore Em um novo terminal, execute: rosrun tutorial_ros talker Em um outro terminal, execute: rosrun tutorial_ros listener
29 Criando um Service/Client Em um terminal, crie um pacote: roscreate-pkg tutorial_2_ros roscpp std_msgs Vá para o diretório do pacote, digitando: roscd tutorial_2_ros Crie uma pasta srv: mkdir srv
30 Criando um Service/Client Ao invés de criarmos um novo serviço, iremos copiar um serviço existente: roscp rospy_tutorials AddTwoInts.srv srv/addtwoints. srv Para gerar o serviço, abra com um editor de texto o arquivo CMakeLists.txt Remova o # para descomentar a seguinte linha: #rosbuild_gensrv()
31 Criando um Service/Client service.cpp #include "ros/ros.h" #include "tutorial_2_ros/addtwoints.h" bool add(tutorial_2_ros::addtwoints::request &req, tutorial_2_ros::addtwoints::response &res ) { res.sum = req.a + req.b; ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b); ROS_INFO("sending back response: [%ld]", (long int)res.sum); return true; } int main(int argc, char **argv) { ros::init(argc, argv, "add_two_ints_server"); ros::nodehandle n; ros::serviceserver service = n.advertiseservice("add_two_ints", add); ROS_INFO("Ready to add two ints."); ros::spin(); return 0; }
32 Criando um Service/Client service.cpp #include "ros/ros.h" #include "tutorial_2_ros/addtwoints.h" Serviço bool add(tutorial_2_ros::addtwoints::request &req, tutorial_2_ros::addtwoints::response &res ) { res.sum = req.a + req.b; ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b); ROS_INFO("sending back response: [%ld]", (long int)res.sum); return true; } int main(int argc, char **argv) Inicialização do ROS { ros::init(argc, argv, "add_two_ints_server"); ros::nodehandle n; ros::serviceserver service = n.advertiseservice("add_two_ints", add); ROS_INFO("Ready to add two ints."); ros::spin(); Criação do tópico para disponibilizar o serviço return 0; } Entra em loop, aguardando requisições
33 Criando um Service/Client client.cpp #include "ros/ros.h" #include "tutorial_2_ros/addtwoints.h" #include <cstdlib> int main(int argc, char **argv) { ros::init(argc, argv, "add_two_ints_client"); if (argc!= 3) { ROS_INFO("usage: add_two_ints_client X Y"); return 1; } ros::nodehandle n; ros::serviceclient client = n.serviceclient<tutorial_2_ros::addtwoints>("add_two_ints"); tutorial_2_ros::addtwoints srv; srv.request.a = atoll(argv[1]); srv.request.b = atoll(argv[2]); if (client.call(srv)) { ROS_INFO("Sum: %ld", (long int)srv.response.sum); } else { ROS_ERROR("Failed to call service add_two_ints"); return 1; } return 0; }
34 Criando um Service/Client client.cpp #include "ros/ros.h" #include "tutorial_2_ros/addtwoints.h" #include <cstdlib> int main(int argc, char **argv) Inicialização do ROS { ros::init(argc, argv, "add_two_ints_client"); if (argc!= 3) { ROS_INFO("usage: add_two_ints_client X Y"); return 1; } Descrição do tópico à ser requisitado ros::nodehandle n; ros::serviceclient client = n.serviceclient<tutorial_2_ros::addtwoints>("add_two_ints"); tutorial_2_ros::addtwoints srv; Instanciação da classe Serviço. Classe contém dois srv.request.a = atoll(argv[1]); membros: request e response. srv.request.b = atoll(argv[2]); if (client.call(srv)) { ROS_INFO("Sum: %ld", (long int)srv.response.sum); Realiza requisição do serviço. Chamadas de serviço } são bloqueantes, então se a chamada for sucedida, else call() retornará verdadeiro e o valor srv.response será { válido. ROS_ERROR("Failed to call service add_two_ints"); return 1; } return 0; }
35 Criando um Service/Client Na pasta src, crie o arquivo service.cpp e client.cpp Com qualquer editor de texto, abra o arquivo CMakeLists.txt. Adicione as seguintes linhas: rosbuild_add_executable(client src/client.cpp) rosbuild_add_executable(service src/service.cpp) Compile o pacote, digitando: rosmake tutorial_2_ros
36 Criando um Service/Client Execute o roscore: roscore Em um novo terminal, execute: rosrun tutorial_2_ros service Em um outro terminal, execute: rosrun tutorial_2_ros client 1 3
37 Ferramentas de Visualização rxgraph Mostra uma visualização dos nodos que estão sendo executados no ROS. Uso: rxgraph [opções] Opções: -o nomedoarquivo Salva o gráfico gerado num aquivo.dot
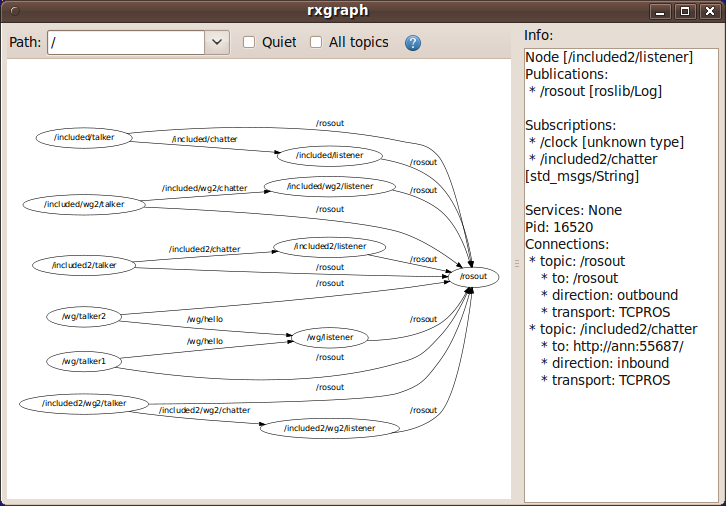
38 rxgraph
39 Ferramentas de Visualização rxconsole É um visualizador que mostra as mensagens que estão sendo publicadas ao longo do tempo, e permite uma visualização mais detalhada delas. Uso: rxconsole
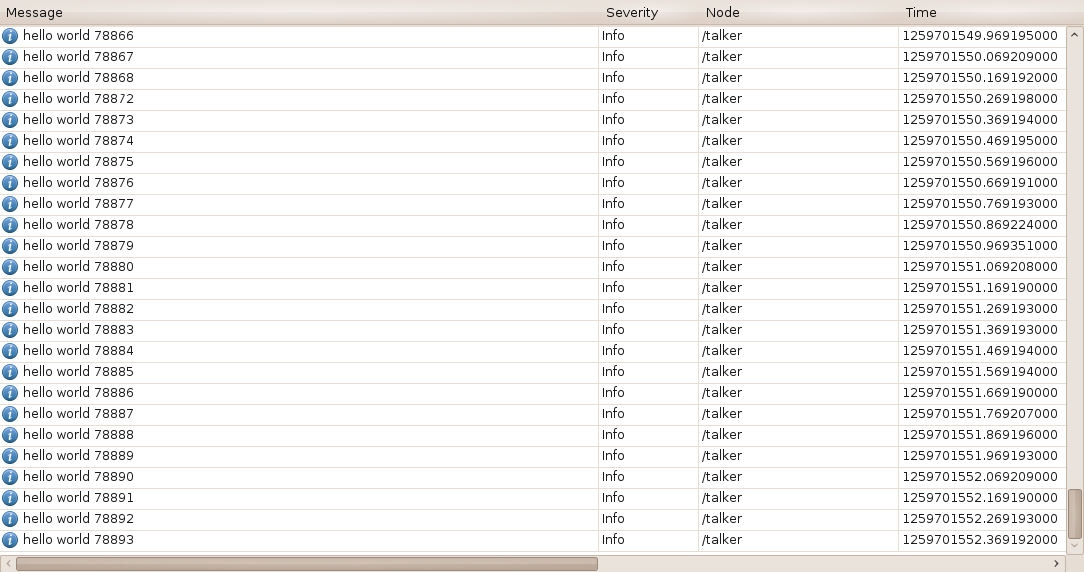
40 rxconsole
41 Ferramentas de Visualização rxbag É uma ferramenta de interface com o usuário que permite visualizar, inspecionar e rever um histórico de mensagens do ROS. Uso: rxbag nomedoarquivo rxbag [opções] Exemplo: rxbag --record /nomedotópico Opções:
42 rxbag
43 Ferramentas de Visualização rxplot É uma ferramenta do pacote rxtools que serve para plotar informações de nodos do ROS. Uso: rxplot /topixo1/campo1 /topico2/campo2 rxplot /topixo1/campo1,/topico2/campo2 rxplot /topixo1/campo1:campo2:campo3 Opções:
44 rxplot
45 Ferramentas de Visualização rviz É uma ferramenta para ambientes 3D do ROS. Uso: a. compilar: rosmake rviz b. executar: rosrun rviz rviz Opções:
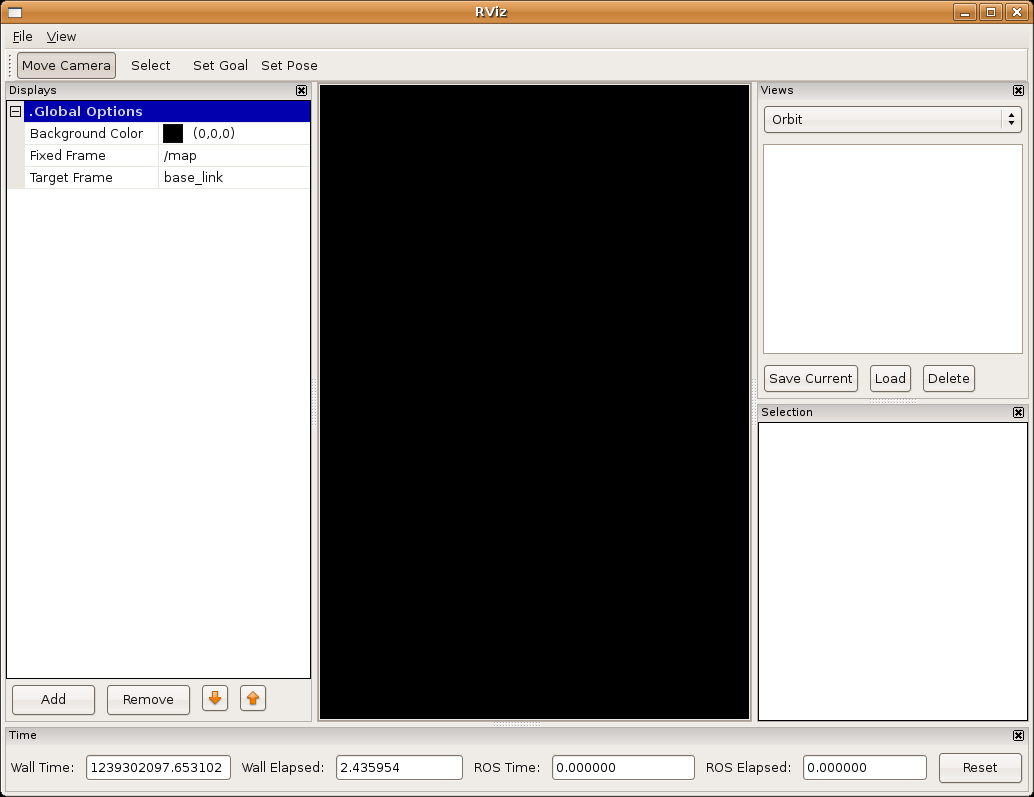
46 rviz
47 rviz Adicionar novo Display:

48 rviz Status de um Display: 1. OK 2. Warning 3. Error 4. Disabled
49 rviz
50 Demonstração rviz + Kinect
51 Integração com OpenCV Biblioteca de visão computacional em tempo real ROS possui tipo de mensagem próprio CvBridge biblioteca que provê interface entre ROS e OpenCV
52 Integração com OpenCV
53 Demonstração com OpenCV Detecção de círculos Detecção de linhas (UWSim)

54 Vídeo Demonstração - Lego NXT
55 Mais Informações ros.org youtube.com/user/willowgaragevideo code.ros.org youtube.com/watch?v=fxxbup-4800
56 Download da Apresentação bit.ly/sacomp_ros
57 ROS - Robot Operating System Obrigado! Perguntas? Diones Fischer - dionesf@gmail.com Felipe Almeida - feliperalmeida@gmail.com Matheus Longaray - longaray.matheus@gmail. com
Introdução à Robótica Móvel através do Robot Operating System (ROS)
") Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CPGEI/PPGCA - Robótica Móvel Introdução à Robótica Móvel através do Robot Operating System (ROS) Prof. André Schneider de Oliveira Prof. João
Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CPGEI/PPGCA - Robótica Móvel Introdução à Robótica Móvel através do Robot Operating System (ROS) Prof. André Schneider de Oliveira Prof. João
Introdução ao ROS. Andrey Masiero. 5 de fevereiro de 2016
 Introdução ao ROS Andrey Masiero 5 de fevereiro de 2016 Agenda 1 O que é ROS? 2 História 3 Como funciona? Estrutura Publisher e Subscriber 4 Mãos a obra Instalando ROS Indigo Configurando o workspace do
Introdução ao ROS Andrey Masiero 5 de fevereiro de 2016 Agenda 1 O que é ROS? 2 História 3 Como funciona? Estrutura Publisher e Subscriber 4 Mãos a obra Instalando ROS Indigo Configurando o workspace do
Infra-Estrutura de Software. Introdução. (cont.)
") Infra-Estrutura de Software Introdução (cont.) O que vimos Complexidade do computador moderno, do ponto de vista do hardware Necessidade de abstrações software Sistema computacional em camadas SO como
Infra-Estrutura de Software Introdução (cont.) O que vimos Complexidade do computador moderno, do ponto de vista do hardware Necessidade de abstrações software Sistema computacional em camadas SO como
Instalação: permite baixar o pacote de instalação do agente de coleta do sistema.
 O que é o projeto O PROINFODATA - programa de coleta de dados do projeto ProInfo/MEC de inclusão digital nas escolas públicas brasileiras tem como objetivo acompanhar o estado de funcionamento dos laboratórios
O que é o projeto O PROINFODATA - programa de coleta de dados do projeto ProInfo/MEC de inclusão digital nas escolas públicas brasileiras tem como objetivo acompanhar o estado de funcionamento dos laboratórios
Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CASE004/CSW45 - Robótica Móvel /1. Controle de posição
 Disciplina: CASE004/CSW45 - Robótica Móvel /1. Controle de posição") Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CASE004/CSW45 - Robótica Móvel - 2017/1 Controle de posição Prof. André Schneider de Oliveira Prof. João Alberto Fabro Estrutura da apresentação
Universidade Tecnológica Federal do Paraná (UTFPR) Disciplina: CASE004/CSW45 - Robótica Móvel - 2017/1 Controle de posição Prof. André Schneider de Oliveira Prof. João Alberto Fabro Estrutura da apresentação
IBM SPSS Modeler - Princípios Básicos do R: Instruções de Instalação
 IBM SPSS Modeler - Princípios Básicos do R: Instruções de Instalação Índice IBM SPSS Modeler - Essentials for R: Instruções de Instalação....... 1 IBM SPSS Modeler - Essentials for R: Instruções de Instalação...............
IBM SPSS Modeler - Princípios Básicos do R: Instruções de Instalação Índice IBM SPSS Modeler - Essentials for R: Instruções de Instalação....... 1 IBM SPSS Modeler - Essentials for R: Instruções de Instalação...............
Mobile Command. Diego Armando Gusava. Orientador: Mauro Marcelo Mattos
 Mobile Command Diego Armando Gusava Orientador: Mauro Marcelo Mattos Roteiro Introdução Objetivos Fundamentação teórica Desenvolvimento Implementação Conclusão Extensões Introdução O que me motivou? Solução
Mobile Command Diego Armando Gusava Orientador: Mauro Marcelo Mattos Roteiro Introdução Objetivos Fundamentação teórica Desenvolvimento Implementação Conclusão Extensões Introdução O que me motivou? Solução
Cinemática Direta no ROS
 Cinemática Direta no ROS Walter Fetter Lages fetter@ece.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica
Cinemática Direta no ROS Walter Fetter Lages fetter@ece.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica
Introdução. O que vimos. Infraestrutura de Software. (cont.) História dos Sistemas Operacionais. O que vimos 12/03/2012. Primeira geração: 1945-1955
 História dos Sistemas Operacionais. O que vimos 12/03/2012. Primeira geração: 1945-1955") O que vimos Infraestrutura de Software Introdução (cont.) Complexidade do computador moderno, do ponto de vista do hardware Necessidade de abstrações software Sistema computacional em camadas SO como uma
O que vimos Infraestrutura de Software Introdução (cont.) Complexidade do computador moderno, do ponto de vista do hardware Necessidade de abstrações software Sistema computacional em camadas SO como uma
CURSO BÁSICO DE PROGRAMAÇÃO AULA 8. Introdução ao Linux Introdução a linguagem C
 CURSO BÁSICO DE PROGRAMAÇÃO AULA 8 Introdução ao Linux Introdução a linguagem C Linux Linux é um termo utilizado para se referir a sistemas operacionais que utilizem o núcleo Linux. Existem muitas distribuições
CURSO BÁSICO DE PROGRAMAÇÃO AULA 8 Introdução ao Linux Introdução a linguagem C Linux Linux é um termo utilizado para se referir a sistemas operacionais que utilizem o núcleo Linux. Existem muitas distribuições
Na disciplina de Cálculo Numérico, vamos trabalhar com a linguagem C++ e o compilador que vamos usar é o Dev C++.
 Data: 14/8 Página 1 de 9 Primeiros passos Introdução Na disciplina de Cálculo Numérico, vamos trabalhar com a linguagem C++ e o compilador que vamos usar é o Dev C++. No tutorial anterior, mostramos como
Data: 14/8 Página 1 de 9 Primeiros passos Introdução Na disciplina de Cálculo Numérico, vamos trabalhar com a linguagem C++ e o compilador que vamos usar é o Dev C++. No tutorial anterior, mostramos como
Tutorial de Integração PYTHON
 Tutorial de Integração PYTHON Sumário Tutorial de Integração - Python... 3 Configurando Envio... 4 Enviando Múltiplos SMS... 5 Enviando Múltiplos SMS a partir de um arquivo CSV... 7 Enviando SMS Individuais...
Tutorial de Integração PYTHON Sumário Tutorial de Integração - Python... 3 Configurando Envio... 4 Enviando Múltiplos SMS... 5 Enviando Múltiplos SMS a partir de um arquivo CSV... 7 Enviando SMS Individuais...
DESCRIÇÃO DO TRABALHO - VERSÃO DE 29/04/2006 15:00.
 DESCRIÇÃO DO TRABALHO - VERSÃO DE 29/04/2006 15:00. Descrição Geral do trabalho. O objetivo do trabalho será o desenvolvimento de um programa Cliente/Servidor para o envio e recebimento de arquivos. Os
DESCRIÇÃO DO TRABALHO - VERSÃO DE 29/04/2006 15:00. Descrição Geral do trabalho. O objetivo do trabalho será o desenvolvimento de um programa Cliente/Servidor para o envio e recebimento de arquivos. Os
IBM SPSS Modeler - Princípios Básicos do R: Instruções de Instalação
 IBM SPSS Modeler - Princípios Básicos do R: Instruções de Instalação Índice IBM SPSS Modeler - Essentials for R: Instruções de Instalação....... 1 Visão Geral............... 1 Instalar o Aplicativo IBM
IBM SPSS Modeler - Princípios Básicos do R: Instruções de Instalação Índice IBM SPSS Modeler - Essentials for R: Instruções de Instalação....... 1 Visão Geral............... 1 Instalar o Aplicativo IBM
Introdução à Programação de Computadores
 1 / 32 Introdução à Programação de Computadores Professora: Marina Andretta Estagiário PAE: Leandro Mundim Monitor: João Vitor ICMC/USP 28/02/2014 2 / 32 Plano 1 Introdução 2 Sistema Operacional 3 Editores
1 / 32 Introdução à Programação de Computadores Professora: Marina Andretta Estagiário PAE: Leandro Mundim Monitor: João Vitor ICMC/USP 28/02/2014 2 / 32 Plano 1 Introdução 2 Sistema Operacional 3 Editores
Instalando software MÉDICO Online no servidor
 Instalando software MÉDICO Online no servidor A máquina denominada Servidora é a que armazenará o banco de dados do software (arquivo responsável pelas informações inseridas), compartilhando com as demais
Instalando software MÉDICO Online no servidor A máquina denominada Servidora é a que armazenará o banco de dados do software (arquivo responsável pelas informações inseridas), compartilhando com as demais
LINX POSTOS AUTOSYSTEM
 LINX POSTOS AUTOSYSTEM Manual Serviços e Agendamento Sumário 1 SERVIÇOS NO LINX POSTOS AUTOSYSTEM...3 2 CRIAR SERVIÇO...3 2.1 Agendamento de Tarefas Windows...5 2.2 Criar Serviço e Agendar Tarefas no Ubuntu-LINUX...6
LINX POSTOS AUTOSYSTEM Manual Serviços e Agendamento Sumário 1 SERVIÇOS NO LINX POSTOS AUTOSYSTEM...3 2 CRIAR SERVIÇO...3 2.1 Agendamento de Tarefas Windows...5 2.2 Criar Serviço e Agendar Tarefas no Ubuntu-LINUX...6
ENDEREÇOS DE REDE PRIVADOS. 10.0.0.0 até 10.255.255.255 172.16.0.0 até 172.31.255.255 192.168.0.0 até 192.168.255.255. Kernel
 ENDEREÇOS DE REDE PRIVADOS Foram reservados intervalos de endereços IP para serem utilizados exclusivamente em redes privadas, como é o caso das redes locais e Intranets. Esses endereços não devem ser
ENDEREÇOS DE REDE PRIVADOS Foram reservados intervalos de endereços IP para serem utilizados exclusivamente em redes privadas, como é o caso das redes locais e Intranets. Esses endereços não devem ser
Para funcionamento do Netz, alguns programas devem ser instalados e alguns procedimentos devem ser seguidos. São eles:
 Instalação do Netz Para funcionamento do Netz, alguns programas devem ser instalados e alguns procedimentos devem ser seguidos. São eles: Instalação do Java SE 6, que pode ser instalado através da JDK.
Instalação do Netz Para funcionamento do Netz, alguns programas devem ser instalados e alguns procedimentos devem ser seguidos. São eles: Instalação do Java SE 6, que pode ser instalado através da JDK.
Roteiro 3: Sistemas Linux arquivos e diretórios
 Roteiro 3: Sistemas Linux arquivos e diretórios Objetivos Detalhar conceitos sobre o sistema operacional Linux; Operar comandos básicos de sistemas Linux em modo Texto; Realizar a manutenção de arquivos
Roteiro 3: Sistemas Linux arquivos e diretórios Objetivos Detalhar conceitos sobre o sistema operacional Linux; Operar comandos básicos de sistemas Linux em modo Texto; Realizar a manutenção de arquivos
Salvando arquivos em PDF nos Sistemas Mainframes, utilizando emuladores de terminal
 DIRETORIA DE OPERAÇÕES DO GERÊNCIA DE GESTÃO DE AMBIENTES GGA Salvando arquivos em PDF nos Sistemas Mainframes, utilizando emuladores de terminal Documento Versão 1.0.1 Adaptado por Coordenação Data de
DIRETORIA DE OPERAÇÕES DO GERÊNCIA DE GESTÃO DE AMBIENTES GGA Salvando arquivos em PDF nos Sistemas Mainframes, utilizando emuladores de terminal Documento Versão 1.0.1 Adaptado por Coordenação Data de
Assinatura de Mensagens
 Assinatura de Mensagens Walter Fetter Lages fetter@ece.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica
Assinatura de Mensagens Walter Fetter Lages fetter@ece.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ENG10026 Robótica
XXXVIII Reunião Anual da SBNeC
 XXXVIII Reunião Anual da SBNeC Introdução ao Armazenamento de Dados de Experimentos em Neurociência Parte 3: Uso de questionários digitais (continuação) + Ferramentas para Gerenciamento de Arquivos Amanda
XXXVIII Reunião Anual da SBNeC Introdução ao Armazenamento de Dados de Experimentos em Neurociência Parte 3: Uso de questionários digitais (continuação) + Ferramentas para Gerenciamento de Arquivos Amanda
PostgreSQL & PostGIS: Instalação do Banco de Dados Espacial no Windows 7
 PostgreSQL & PostGIS: Instalação do Banco de Dados Espacial no Windows 7 PostgreSQL & PostGIS: Instalação do Banco de Dados Espacial no Windows 7 Sobre o PostGIS PostGIS é um Add-on (complemento, extensão)
PostgreSQL & PostGIS: Instalação do Banco de Dados Espacial no Windows 7 PostgreSQL & PostGIS: Instalação do Banco de Dados Espacial no Windows 7 Sobre o PostGIS PostGIS é um Add-on (complemento, extensão)
GUIA INTEGRA SERVICES E STATUS MONITOR
 GUIA INTEGRA SERVICES E STATUS MONITOR 1 - Integra Services Atenção: o Integra Services está disponível a partir da versão 2.0 do software Urano Integra. O Integra Services é um aplicativo que faz parte
GUIA INTEGRA SERVICES E STATUS MONITOR 1 - Integra Services Atenção: o Integra Services está disponível a partir da versão 2.0 do software Urano Integra. O Integra Services é um aplicativo que faz parte
Orientações para o uso do Mozilla Thunderbird
 Orientações para o uso do Mozilla Thunderbird Mozilla Thunderbird O Mozilla Thunderbird é um software livre feito para facilitar a leitura, o envio e o gerenciamento de e-mails. Índice Configurando o Mozilla
Orientações para o uso do Mozilla Thunderbird Mozilla Thunderbird O Mozilla Thunderbird é um software livre feito para facilitar a leitura, o envio e o gerenciamento de e-mails. Índice Configurando o Mozilla
Sistemas Autônomos através do Robot Operating System (ROS)
") Sistemas Autônomos através do Robot Operating System (ROS) Prof. André Schneider de Oliveira Prof. João Alberto Fabro Universidade Técnológica Federal do Paraná (UTFPR) Robótica Autonomia see-think-act
Sistemas Autônomos através do Robot Operating System (ROS) Prof. André Schneider de Oliveira Prof. João Alberto Fabro Universidade Técnológica Federal do Paraná (UTFPR) Robótica Autonomia see-think-act
Tutorial de Integração PHP
 Tutorial de Integração PHP Sumário Tutorial de Integração - PHP... 3 Configurando Envio... 4 Enviando Múltiplos SMS... 5 Enviando Múltiplos SMS a partir de um arquivo CSV... 7 Consultando status de SMS
Tutorial de Integração PHP Sumário Tutorial de Integração - PHP... 3 Configurando Envio... 4 Enviando Múltiplos SMS... 5 Enviando Múltiplos SMS a partir de um arquivo CSV... 7 Consultando status de SMS
SOFTWARE LIVRE. Distribuições Live CD. Kernel. Distribuição Linux
 SOFTWARE LIVRE A liberdade de executar o programa, para qualquer propósito. A liberdade de estudar como o programa funciona, e adaptá-lo para as suas necessidades. Acesso ao código-fonte é um pré-requisito
SOFTWARE LIVRE A liberdade de executar o programa, para qualquer propósito. A liberdade de estudar como o programa funciona, e adaptá-lo para as suas necessidades. Acesso ao código-fonte é um pré-requisito
INTRODUÇÃO AO JAVA PARA PROGRAMADORES C
 PROGRAMAÇÃO SERVIDOR EM SISTEMAS WEB INTRODUÇÃO AO JAVA PARA PROGRAMADORES C Prof. Dr. Daniel Caetano 2012-1 Objetivos Apresentar a grande semelhança entre Java e C Apresentar a organização diferenciada
PROGRAMAÇÃO SERVIDOR EM SISTEMAS WEB INTRODUÇÃO AO JAVA PARA PROGRAMADORES C Prof. Dr. Daniel Caetano 2012-1 Objetivos Apresentar a grande semelhança entre Java e C Apresentar a organização diferenciada
Cinemática Direta no ROS
 Cinemática Direta no ROS Walter Fetter Lages fetter@ece.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica
Cinemática Direta no ROS Walter Fetter Lages fetter@ece.ufrgs.br Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Sistemas Elétricos de Automação e Energia ELE228 Robótica
Capítulo 2. Charm++ 16
 2 Charm++ O Charm++ é uma linguagem orientada a objetos para programação paralela baseada em C++ (34). Ela possui uma biblioteca de execução para suporte a computação paralela que se chama Kernel do Charm
2 Charm++ O Charm++ é uma linguagem orientada a objetos para programação paralela baseada em C++ (34). Ela possui uma biblioteca de execução para suporte a computação paralela que se chama Kernel do Charm
ÍNDICE 1.CONHECENDO OS APLICATIVOS NECESSÁRIOS PARA O FUNCIONAMENTO DO SISTEMA URANO INTEGRA...
 Instalação do Sistema Urano Integra em Sistema Operacional Windows 1 ÍNDICE 1.CONHECENDO OS APLICATIVOS NECESSÁRIOS PARA O FUNCIONAMENTO DO SISTEMA URANO INTEGRA.... 3 1.1 URANO INTEGRA... 3 1.2 JAVA RUNTIME
Instalação do Sistema Urano Integra em Sistema Operacional Windows 1 ÍNDICE 1.CONHECENDO OS APLICATIVOS NECESSÁRIOS PARA O FUNCIONAMENTO DO SISTEMA URANO INTEGRA.... 3 1.1 URANO INTEGRA... 3 1.2 JAVA RUNTIME
Manual de Instalação do Agente Citsmart
 16/08/2013 Manual de Instalação do Agente Citsmart Fornece orientações necessárias para efetuar a instalação do Agente Citsmart. Versão 1.9 21/11/2014 Visão Resumida Data Criação 21/11/2014 Versão Documento
16/08/2013 Manual de Instalação do Agente Citsmart Fornece orientações necessárias para efetuar a instalação do Agente Citsmart. Versão 1.9 21/11/2014 Visão Resumida Data Criação 21/11/2014 Versão Documento
Sistemas Operacionais. Prof. M.Sc. Sérgio Teixeira. Aula 05 Estrutura e arquitetura do SO Parte 2. Cursos de Computação
 Cursos de Computação Sistemas Operacionais Prof. M.Sc. Sérgio Teixeira Aula 05 Estrutura e arquitetura do SO Parte 2 Referência: MACHADO, F.B. ; MAIA, L.P. Arquitetura de Sistemas Operacionais. 4.ed. LTC,
Cursos de Computação Sistemas Operacionais Prof. M.Sc. Sérgio Teixeira Aula 05 Estrutura e arquitetura do SO Parte 2 Referência: MACHADO, F.B. ; MAIA, L.P. Arquitetura de Sistemas Operacionais. 4.ed. LTC,
Sistemas Distribuídos. Professora: Ana Paula Couto DCC 064
 Sistemas Distribuídos Professora: Ana Paula Couto DCC 064 Processos- Clientes, Servidores, Migração Capítulo 3 Agenda Clientes Interfaces de usuário em rede Sistema X Window Software do lado cliente para
Sistemas Distribuídos Professora: Ana Paula Couto DCC 064 Processos- Clientes, Servidores, Migração Capítulo 3 Agenda Clientes Interfaces de usuário em rede Sistema X Window Software do lado cliente para
Computação II Orientação a Objetos
 Computação II Orientação a Objetos Fabio Mascarenhas - 2014.1 http://www.dcc.ufrj.br/~fabiom/java Android Android é um sistema operacional para dispositivos móveis Kernel Linux, drivers e bibliotecas do
Computação II Orientação a Objetos Fabio Mascarenhas - 2014.1 http://www.dcc.ufrj.br/~fabiom/java Android Android é um sistema operacional para dispositivos móveis Kernel Linux, drivers e bibliotecas do
1. Apresentação. 1.1. Objetivos
 1.1. Objetivos 1. Apresentação Neste capítulo estão descritos os objetivos gerais do livro, os requisitos desejáveis do estudante para que possa utilizá-lo eficientemente, e os recursos necessários em
1.1. Objetivos 1. Apresentação Neste capítulo estão descritos os objetivos gerais do livro, os requisitos desejáveis do estudante para que possa utilizá-lo eficientemente, e os recursos necessários em
BACKUP ONLINE PASSOS PARA CONFIGURAÇÃO INICIAL DO PRODUTO
 BACKUP ONLINE PASSOS PARA CONFIGURAÇÃO INICIAL DO PRODUTO Criação de Conta de Usuário...03 Edição da Conta de Usuário...10 Download do Backup Online Embratel...10 Descrição dos Conjuntos de Cópia de Segurança...19
BACKUP ONLINE PASSOS PARA CONFIGURAÇÃO INICIAL DO PRODUTO Criação de Conta de Usuário...03 Edição da Conta de Usuário...10 Download do Backup Online Embratel...10 Descrição dos Conjuntos de Cópia de Segurança...19
Instalando o Debian em modo texto
 Instalando o Debian em modo texto Por ser composto por um número absurdamente grande de pacotes, baixar os CDs de instalação do Debian é uma tarefa ingrata. Você pode ver uma lista dos mirrors disponíveis
Instalando o Debian em modo texto Por ser composto por um número absurdamente grande de pacotes, baixar os CDs de instalação do Debian é uma tarefa ingrata. Você pode ver uma lista dos mirrors disponíveis
Programação Orientada a Objetos com PHP & MySQL Cookies e Sessões. Prof. MSc. Hugo Souza
 Programação Orientada a Objetos com PHP & MySQL Cookies e Sessões Prof. MSc. Hugo Souza Se você precisar manter informações sobre seus usuários enquanto eles navegam pelo seu site, ou até quando eles saem
Programação Orientada a Objetos com PHP & MySQL Cookies e Sessões Prof. MSc. Hugo Souza Se você precisar manter informações sobre seus usuários enquanto eles navegam pelo seu site, ou até quando eles saem
MANUAL DE UTILIZAÇÃO DO PLUGIN GERADOR DE PLUGINS DO TERRAVIEW
 MANUAL DE UTILIZAÇÃO DO PLUGIN GERADOR DE PLUGINS DO TERRAVIEW Versão TerraLib/TerraView: 3.6.0 Introdução O plug-in de criação de plug-ins do TerraView foi desenvolvido para auxiliar os programadores
MANUAL DE UTILIZAÇÃO DO PLUGIN GERADOR DE PLUGINS DO TERRAVIEW Versão TerraLib/TerraView: 3.6.0 Introdução O plug-in de criação de plug-ins do TerraView foi desenvolvido para auxiliar os programadores
Computação II Orientação a Objetos
 Computação II Orientação a Objetos Fabio Mascarenhas - 2014.1 http://www.dcc.ufrj.br/~fabiom/java Introdução Esse não é um curso de Java! O objetivo é aprender os conceitos da programação orientada a objetos,
Computação II Orientação a Objetos Fabio Mascarenhas - 2014.1 http://www.dcc.ufrj.br/~fabiom/java Introdução Esse não é um curso de Java! O objetivo é aprender os conceitos da programação orientada a objetos,
ECD1200 Equipamento de Consulta de Dados KIT DE DESENVOLVIMENTO
 Equipamento de Consulta de Dados KIT DE DESENVOLVIMENTO Versão do documento: 1.1 1. Introdução...3 2. Documentação...3 2.1. DOCUMENTAÇÃO DE REFERÊNCIA... 3 2.2. DESCRIÇÃO FUNCIONAL... 4 2.2.1. INTERFACE...
Equipamento de Consulta de Dados KIT DE DESENVOLVIMENTO Versão do documento: 1.1 1. Introdução...3 2. Documentação...3 2.1. DOCUMENTAÇÃO DE REFERÊNCIA... 3 2.2. DESCRIÇÃO FUNCIONAL... 4 2.2.1. INTERFACE...
Para que o Educa Mobile seja disponibilizado para os alunos, responsáveis por alunos e/ou professores os passos abaixo devem ser seguidos:
 TOTVS Educa Mobile Produto : TOTVS Educa Mobile 11.83.54 Processo : Educa Mobile Subprocesso : Data publicação da : 14/07/2014 As funcionalidades do Educa Mobile permitem que alunos, responsáveis por alunos
TOTVS Educa Mobile Produto : TOTVS Educa Mobile 11.83.54 Processo : Educa Mobile Subprocesso : Data publicação da : 14/07/2014 As funcionalidades do Educa Mobile permitem que alunos, responsáveis por alunos
Sistemas Operacionais
 Sistemas Operacionais Sistemas Operacionais Prof. Marcelo Sabaris Carballo Pinto Gerenciamento de Dispositivos Gerenciamento de Dispositivos de E/S Introdução Gerenciador de Dispositivos Todos os dispositivos
Sistemas Operacionais Sistemas Operacionais Prof. Marcelo Sabaris Carballo Pinto Gerenciamento de Dispositivos Gerenciamento de Dispositivos de E/S Introdução Gerenciador de Dispositivos Todos os dispositivos
Tutorial de Computação Programação em Java para MEC1100 v2010.10
 Tutorial de Computação Programação em Java para MEC1100 v2010.10 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Computação Programação em Java para MEC1100 v2010.10 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Manual de Instalação PIMSConnector em Windows
 Manual de Instalação PIMSConnector em Windows Julho/2015 Sumário 1. Contexto de negócio (Introdução)... 3 2. Pré-requisitos instalação/implantação/utilização... 4 3. JBOSS... 6 3.1. Instalação... 6 3.2.
Manual de Instalação PIMSConnector em Windows Julho/2015 Sumário 1. Contexto de negócio (Introdução)... 3 2. Pré-requisitos instalação/implantação/utilização... 4 3. JBOSS... 6 3.1. Instalação... 6 3.2.
Software que fornece uma interface entre o computador e o usuário. É uma coleção de programas que:
 SISTEMA OPERACIONAL Sistema Operacional Software que fornece uma interface entre o computador e o usuário. É uma coleção de programas que: inicializa o hardware do computador controla os dispositivos Gerencia
SISTEMA OPERACIONAL Sistema Operacional Software que fornece uma interface entre o computador e o usuário. É uma coleção de programas que: inicializa o hardware do computador controla os dispositivos Gerencia
Introdução ao Android
 Introdução ao Android André Gustavo Duarte de Almeida docente.ifrn.edu.br/andrealmeida Parte 1 Conhecendo o Sistema e Primeiro Programa Roteiro Pré-requisitos Conceitos Básicos Configurando o Ambiente
Introdução ao Android André Gustavo Duarte de Almeida docente.ifrn.edu.br/andrealmeida Parte 1 Conhecendo o Sistema e Primeiro Programa Roteiro Pré-requisitos Conceitos Básicos Configurando o Ambiente
STK (Start Kit DARUMA) Procedimento de Instalação do Min200E Conexão USB
 Procedimento de Instalação do Min200E Conexão USB") STK (Start Kit DARUMA) Procedimento de Instalação do Min200E Conexão USB Esse STK ensinará como você deve instalar o driver conversor do Modem MIN200E USB em ambiente que utiliza o sistema operacional
STK (Start Kit DARUMA) Procedimento de Instalação do Min200E Conexão USB Esse STK ensinará como você deve instalar o driver conversor do Modem MIN200E USB em ambiente que utiliza o sistema operacional
GUIA RÁPIDO SISTEMA ANTIFURTO THEFT DETERRENT
 GUIA RÁPIDO SISTEMA ANTIFURTO THEFT DETERRENT SUMÁRIO Prefácio... 1 A quem se destina... 1 Nomenclatura utilizada neste documento... 1 Tela de login... 2 Tela Inicial... 4 Gestão de Dispositivo Acompanhar
GUIA RÁPIDO SISTEMA ANTIFURTO THEFT DETERRENT SUMÁRIO Prefácio... 1 A quem se destina... 1 Nomenclatura utilizada neste documento... 1 Tela de login... 2 Tela Inicial... 4 Gestão de Dispositivo Acompanhar
Eclipse com c++11 e boost Etapa 1- Download da IDE Eclipse c++ e configuração do MinGW
 Eclipse com c++11 e boost Etapa 1- Download da IDE Eclipse c++ e configuração do MinGW Primeiro passo: download Primeiramente devemos baixar o eclipse para c++, sugiro a ultima versão o Mars M4 https://eclipse.org/downloads/packages/release/mars/m4
Eclipse com c++11 e boost Etapa 1- Download da IDE Eclipse c++ e configuração do MinGW Primeiro passo: download Primeiramente devemos baixar o eclipse para c++, sugiro a ultima versão o Mars M4 https://eclipse.org/downloads/packages/release/mars/m4
Web Services. Autor: Rômulo Rosa Furtado
 Web Services Autor: Rômulo Rosa Furtado Sumário O que é um Web Service. Qual a finalidade de um Web Service. Como funciona o serviço. Motivação para o uso. Como construir um. Referências. Seção: O que
Web Services Autor: Rômulo Rosa Furtado Sumário O que é um Web Service. Qual a finalidade de um Web Service. Como funciona o serviço. Motivação para o uso. Como construir um. Referências. Seção: O que
Soluções de Acessibilidade. VLibras - Desktop. Manual de Instalação da Ferramenta. Linux R. Núcleo de Pesquisa e Extensão / LAViD
 Soluções de Acessibilidade VLibras - Desktop Manual de Instalação da Ferramenta Linux R Núcleo de Pesquisa e Extensão / LAViD 2015 INTRODUÇÃO Objetivo Este manual contém introdução e informações necessárias
Soluções de Acessibilidade VLibras - Desktop Manual de Instalação da Ferramenta Linux R Núcleo de Pesquisa e Extensão / LAViD 2015 INTRODUÇÃO Objetivo Este manual contém introdução e informações necessárias
Procedimento de Atualização - ONECLICK
 Procedimento de Atualização - ONECLICK Para começarmos a atualizar o equipamento, precisamos primeiramente realizar o download do programa necessário em sua sala de downloads. Para isso, realize o procedimento
Procedimento de Atualização - ONECLICK Para começarmos a atualizar o equipamento, precisamos primeiramente realizar o download do programa necessário em sua sala de downloads. Para isso, realize o procedimento
Um pouco do Java. Prof. Eduardo
 Um pouco do Java Prof. Eduardo Introdução A tecnologia JAVA é composta pela linguagem de programação JAVA e pela plataforma de desenvolvimento JAVA. Os programas são escritos em arquivos-texto com a extensão.java.
Um pouco do Java Prof. Eduardo Introdução A tecnologia JAVA é composta pela linguagem de programação JAVA e pela plataforma de desenvolvimento JAVA. Os programas são escritos em arquivos-texto com a extensão.java.
MANUAL DE INSTALAÇÃO LUZ DO SABER
 MANUAL DE INSTALAÇÃO LUZ DO SABER Sumário Sumário...2 Instalação do Luz do Saber no Linux...3 1ª opção Utilizando um Instalador...3 2ª opção Utilizando comandos no Konsole...6 Observações Importantes...7
MANUAL DE INSTALAÇÃO LUZ DO SABER Sumário Sumário...2 Instalação do Luz do Saber no Linux...3 1ª opção Utilizando um Instalador...3 2ª opção Utilizando comandos no Konsole...6 Observações Importantes...7
DCC 003 Algoritmos e Estruturas de Dados I Tutorial de instalação do GCC e do TextPad
 DCC 003 Algoritmos e Estruturas de Dados I Tutorial de instalação do GCC e do TextPad Semestre: 2012-2 Professor: Daniel Fernandes Macedo Introdução Durante as aulas práticas, iremos utilizar nos laboratórios
DCC 003 Algoritmos e Estruturas de Dados I Tutorial de instalação do GCC e do TextPad Semestre: 2012-2 Professor: Daniel Fernandes Macedo Introdução Durante as aulas práticas, iremos utilizar nos laboratórios
Como Instalar Programas no GNU/Linux. Elexsandro Rangel dos Santos elexsandro.rangel@yahoo.com.br
 Como Instalar Programas no GNU/Linux Elexsandro Rangel dos Santos elexsandro.rangel@yahoo.com.br Sumário O que é um pacote? Principais formatos de pacotes no GNU/Linux Sistema de Gerenciamento de Pacotes
Como Instalar Programas no GNU/Linux Elexsandro Rangel dos Santos elexsandro.rangel@yahoo.com.br Sumário O que é um pacote? Principais formatos de pacotes no GNU/Linux Sistema de Gerenciamento de Pacotes
INTRODUÇÃO À PROGRAMAÇÃO PARA DISPOSITIVOS MÓVEIS. ADS 6º Período
 ADS 6º Período Conceitos básicos do Android - Parte 2 Abra o Android Studio INTRODUÇÃO À PROGRAMAÇÃO PARA Abra o Android Studio INTRODUÇÃO À PROGRAMAÇÃO PARA Abra o Android Studio app build.grade
ADS 6º Período Conceitos básicos do Android - Parte 2 Abra o Android Studio INTRODUÇÃO À PROGRAMAÇÃO PARA Abra o Android Studio INTRODUÇÃO À PROGRAMAÇÃO PARA Abra o Android Studio app build.grade
1. Capturando pacotes a partir da execução do traceroute
 Neste laboratório, iremos investigar o protocolo IP, focando o datagrama IP. Vamos fazê-lo através da analise de um trace de datagramas IP enviados e recebidos por uma execução do programa traceroute (o
Neste laboratório, iremos investigar o protocolo IP, focando o datagrama IP. Vamos fazê-lo através da analise de um trace de datagramas IP enviados e recebidos por uma execução do programa traceroute (o
Partição Partição primária: Partição estendida: Discos básicos e dinâmicos
 Partição Parte de um disco físico que funciona como se fosse um disco fisicamente separado. Depois de criar uma partição, você deve formatá-la e atribuir-lhe uma letra de unidade antes de armazenar dados
Partição Parte de um disco físico que funciona como se fosse um disco fisicamente separado. Depois de criar uma partição, você deve formatá-la e atribuir-lhe uma letra de unidade antes de armazenar dados
PÓS-GRADUAÇÃO EM MATEMÁTICA COMPUTACIONAL INFORMÁTICA INSTRUMENTAL
 PÓS-GRADUAÇÃO EM MATEMÁTICA COMPUTACIONAL INFORMÁTICA INSTRUMENTAL Introdução Aula 10: Introdução à linguagem PHP O PHP é uma linguagem interpretada de uso livre, utilizada originalmente para o desenvolvimento
PÓS-GRADUAÇÃO EM MATEMÁTICA COMPUTACIONAL INFORMÁTICA INSTRUMENTAL Introdução Aula 10: Introdução à linguagem PHP O PHP é uma linguagem interpretada de uso livre, utilizada originalmente para o desenvolvimento
Programação Orientada a Objeto
 Programação Orientada a Objeto Classes, Atributos, Métodos e Objetos Programação de Computadores II Professor: Edwar Saliba Júnior 1) Java é uma linguagem orientada a objetos. Para que possamos fazer uso
Programação Orientada a Objeto Classes, Atributos, Métodos e Objetos Programação de Computadores II Professor: Edwar Saliba Júnior 1) Java é uma linguagem orientada a objetos. Para que possamos fazer uso
Manual de instalação e utilização do software de decriptografia GnuPG (Gnu Pricavy Guard)
") Manual de instalação e utilização do software de decriptografia GnuPG (Gnu Pricavy Guard) 1. Objetivo Definir os procedimentos básicos visando a modificação da sistemática atualmente utilizada na remessa
Manual de instalação e utilização do software de decriptografia GnuPG (Gnu Pricavy Guard) 1. Objetivo Definir os procedimentos básicos visando a modificação da sistemática atualmente utilizada na remessa
AP_ Conta Aplicativo para digitação e envio de contas médicas no padrão TISS
 AP_ Conta Aplicativo para digitação e envio de contas médicas no padrão TISS Manual de Instalação Tempro Software StavTISS Sumário 1. INTRODUÇÃO... 2 2. REQUISITOS DO SISTEMA... 3 3. INSTALAÇÃO... 4 4.
AP_ Conta Aplicativo para digitação e envio de contas médicas no padrão TISS Manual de Instalação Tempro Software StavTISS Sumário 1. INTRODUÇÃO... 2 2. REQUISITOS DO SISTEMA... 3 3. INSTALAÇÃO... 4 4.
Relatorio do trabalho pratico 2
 UNIVERSIDADE FEDERAL DE SANTA CATARINA INE5414 REDES I Aluno: Ramon Dutra Miranda Matricula: 07232120 Relatorio do trabalho pratico 2 O protocolo SNMP (do inglês Simple Network Management Protocol - Protocolo
UNIVERSIDADE FEDERAL DE SANTA CATARINA INE5414 REDES I Aluno: Ramon Dutra Miranda Matricula: 07232120 Relatorio do trabalho pratico 2 O protocolo SNMP (do inglês Simple Network Management Protocol - Protocolo
Lazarus pelo SVN Linux/Windows
 Lazarus pelo SVN Linux/Windows Sei que não faltam artigos sobre como obter e compilar o Lazarus e o FPC pelo SVN, mas sei também que nunca é de mais divulgar um pouco mais e talvez escrever algo diferente.
Lazarus pelo SVN Linux/Windows Sei que não faltam artigos sobre como obter e compilar o Lazarus e o FPC pelo SVN, mas sei também que nunca é de mais divulgar um pouco mais e talvez escrever algo diferente.
MODELO CLIENTE SERVIDOR
 SISTEMAS DISTRIBUÍDOS Modelo Cliente Servidor Modelo que estrutura um S.O. como um grupo de processos cooperantes, chamados servidores, que oferecem serviços a processos usuários, denominados clientes;
SISTEMAS DISTRIBUÍDOS Modelo Cliente Servidor Modelo que estrutura um S.O. como um grupo de processos cooperantes, chamados servidores, que oferecem serviços a processos usuários, denominados clientes;
Sistema Operacional LINUX
 SISTEMA OPERACIONAL Sistema Operacional LINUX Para que o computador funcione e possibilite a execução de programas é necessária a existência de um sistema operacional. O sistema operacional é uma camada
SISTEMA OPERACIONAL Sistema Operacional LINUX Para que o computador funcione e possibilite a execução de programas é necessária a existência de um sistema operacional. O sistema operacional é uma camada
SAIBA MAIS SOBRE O LINUX E DESCUBRA QUAL DISTRIBUIÇÃO É MELHOR PARA VOCÊ! CURSO
 1 AULA SAIBA MAIS SOBRE O LINUX E DESCUBRA QUAL DISTRIBUIÇÃO É MELHOR PARA VOCÊ! ROTEIRO PRÉ-REQUISITOS 1 INTRODUÇÃO 2 DISTRIBUIÇÕES LINUX 3 AJUDA PARA ESCOLHER SUA DISTRIBUIÇÃO LINUX 4 DÚVIDAS FREQUENTES
1 AULA SAIBA MAIS SOBRE O LINUX E DESCUBRA QUAL DISTRIBUIÇÃO É MELHOR PARA VOCÊ! ROTEIRO PRÉ-REQUISITOS 1 INTRODUÇÃO 2 DISTRIBUIÇÕES LINUX 3 AJUDA PARA ESCOLHER SUA DISTRIBUIÇÃO LINUX 4 DÚVIDAS FREQUENTES
Programação de Computadores Primeiros Passos Práticos em C++
 Programação de Computadores Primeiros Passos Práticos em C++ Alan de Freitas! Marco Antonio Carvalho Compilação de Programas O compilador é o responsável por transformar nosso código em um programa propriamente
Programação de Computadores Primeiros Passos Práticos em C++ Alan de Freitas! Marco Antonio Carvalho Compilação de Programas O compilador é o responsável por transformar nosso código em um programa propriamente
Resumo. Prof. Alejandro - Introdução à Sistemas Operacionais Resumo Informativo, complemente o material assistindo as Aulas 19/08/2015 1
 Resumo 19/08/2015 1 1. Tipos de Software 2. Introdução aos Sistemas Operacionais 3. Os Arquivos 4. Funções do Sistema Operacional 5. Programas Utilitários do Sistema Operacional 6. Termos Básicos 7. Tipos
Resumo 19/08/2015 1 1. Tipos de Software 2. Introdução aos Sistemas Operacionais 3. Os Arquivos 4. Funções do Sistema Operacional 5. Programas Utilitários do Sistema Operacional 6. Termos Básicos 7. Tipos
TESTANDO A INTEGRIDADE DAS ISOs E LIVE-USB:
 TESTANDO A INTEGRIDADE DAS ISOs E LIVE-USB: 1 - Tabela com os arquivos a serem baixado em relação ao arquivo com a imagem de instalação do Ubuntu e o arquivo MD5 para verificar a integridade, se é o mesmo
TESTANDO A INTEGRIDADE DAS ISOs E LIVE-USB: 1 - Tabela com os arquivos a serem baixado em relação ao arquivo com a imagem de instalação do Ubuntu e o arquivo MD5 para verificar a integridade, se é o mesmo
Sistema de Instalação e Criação da Estrutura do Banco de Dados MANUAL DO INSTALADOR. Julho/2007. Ministério da saúde
 Sistema de Instalação e Criação da Estrutura do Banco de Dados MANUAL DO INSTALADOR Julho/2007 Ministério da saúde SUMÁRIO Módulo 1. Instalação... 4 Introdução... 4 Configurações de equipamentos para instalação
Sistema de Instalação e Criação da Estrutura do Banco de Dados MANUAL DO INSTALADOR Julho/2007 Ministério da saúde SUMÁRIO Módulo 1. Instalação... 4 Introdução... 4 Configurações de equipamentos para instalação
Programação de Computadores I. Conhecendo a IDE Code::Blocks
 Code::Blocks Conhecendo a IDE Programação de Computadores I Professor: Edwar Saliba Júnior Conhecendo a IDE Code::Blocks Apresentação: 1) Abra a IDE (Integrated Development Environment), ou seja, o Ambiente
Code::Blocks Conhecendo a IDE Programação de Computadores I Professor: Edwar Saliba Júnior Conhecendo a IDE Code::Blocks Apresentação: 1) Abra a IDE (Integrated Development Environment), ou seja, o Ambiente
Criando, inserindo e exibindo PHP+MySql
 Criando, inserindo e exibindo PHP+MySql De uma forma extremamente fácil e básica você verá como criar banco de dados, tabelas, inserir e exibir usando o phpmyadmin, PHP e MySql. O que é um banco de dados?
Criando, inserindo e exibindo PHP+MySql De uma forma extremamente fácil e básica você verá como criar banco de dados, tabelas, inserir e exibir usando o phpmyadmin, PHP e MySql. O que é um banco de dados?
Tutorial de Computação Introdução a Programação Gráfica em Java para MEC1100 v2010.10
 Tutorial de Computação Introdução a Programação Gráfica em Java para MEC1100 v2010.10 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina
Tutorial de Computação Introdução a Programação Gráfica em Java para MEC1100 v2010.10 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina
Despachante Express - Software para o despachante documentalista veicular DESPACHANTE EXPRESS MANUAL DO USUÁRIO VERSÃO 1.1
 DESPACHANTE EXPRESS MANUAL DO USUÁRIO VERSÃO 1.1 1 Sumário 1 - Instalação Normal do Despachante Express... 3 2 - Instalação do Despachante Express em Rede... 5 3 - Registrando o Despachante Express...
DESPACHANTE EXPRESS MANUAL DO USUÁRIO VERSÃO 1.1 1 Sumário 1 - Instalação Normal do Despachante Express... 3 2 - Instalação do Despachante Express em Rede... 5 3 - Registrando o Despachante Express...
Manual da Aplicação Water Monitor
 Manual da Aplicação Water Monitor 1. Descrição da Aplicação 2. Pré-Requisitos de Instalação 3. Passos para Execução 4. Instruções de Uso das Funcionalidades 5. Observações 1. Descrição da Aplicação A aplicação
Manual da Aplicação Water Monitor 1. Descrição da Aplicação 2. Pré-Requisitos de Instalação 3. Passos para Execução 4. Instruções de Uso das Funcionalidades 5. Observações 1. Descrição da Aplicação A aplicação
Manual de Instalação e Configuração do SQL Express
 Manual de Instalação e Configuração do SQL Express Data alteração: 19/07/11 Pré Requisitos: Acesse o seguinte endereço e faça o download gratuito do SQL SRVER EXPRESS, conforme a sua plataforma x32 ou
Manual de Instalação e Configuração do SQL Express Data alteração: 19/07/11 Pré Requisitos: Acesse o seguinte endereço e faça o download gratuito do SQL SRVER EXPRESS, conforme a sua plataforma x32 ou
Tutorial: Programando no Linux
 UECE Universidade Estadual do Ceará CCT Centro de Ciências e Tecnologia Curso de Ciência da Computação Tutorial: Programando no Linux Alunos: Henrique Neto e João Gonçalves Professora: Ana Luiza E-mails:
UECE Universidade Estadual do Ceará CCT Centro de Ciências e Tecnologia Curso de Ciência da Computação Tutorial: Programando no Linux Alunos: Henrique Neto e João Gonçalves Professora: Ana Luiza E-mails:
MANUAL DO INSTAR-MAIL 1.0. Pagina de login e senha do Instar-Mail
 1º Passo: Acesse o seguinte endereço http://www.smtp.com.br/sg/cliente/logar.php MANUAL DO INSTAR-MAIL 1.0 2º Passo: Será apresentada uma tela solicitando o seu login e senha: Sendo assim: Digite o seu
1º Passo: Acesse o seguinte endereço http://www.smtp.com.br/sg/cliente/logar.php MANUAL DO INSTAR-MAIL 1.0 2º Passo: Será apresentada uma tela solicitando o seu login e senha: Sendo assim: Digite o seu
FTIN Formação Técnica em Informática Módulo de Administração de Servidores de Rede AULA 03. Prof. Gabriel Silva
 FTIN Formação Técnica em Informática Módulo de Administração de Servidores de Rede AULA 03 Prof. Gabriel Silva Temas da Aula de Hoje: Servidores Linux. Conceitos Básicos do Linux. Instalando Servidor Linux.
FTIN Formação Técnica em Informática Módulo de Administração de Servidores de Rede AULA 03 Prof. Gabriel Silva Temas da Aula de Hoje: Servidores Linux. Conceitos Básicos do Linux. Instalando Servidor Linux.
Laboratório - Exploração do FTP
 Objetivos Parte 1: Usar o FTP em um prompt de comando Parte 2: Baixar um arquivo FTP usando WS_FTP LE Parte 3: Usar o FTP em um navegador Histórico/cenário O File Transfer Protocol (FTP) faz parte do conjunto
Objetivos Parte 1: Usar o FTP em um prompt de comando Parte 2: Baixar um arquivo FTP usando WS_FTP LE Parte 3: Usar o FTP em um navegador Histórico/cenário O File Transfer Protocol (FTP) faz parte do conjunto
Instalação do ByYou ESB. Guia de Instalação e Atualização do ByYou ESB
 Instalação do ByYou ESB Guia de Instalação e Atualização do ByYou ESB Instalação do ByYou ESB Copyright 2010 TOTVS S.A. Todos os direitos reservados. Nenhuma parte deste documento pode ser copiada, reproduzida,
Instalação do ByYou ESB Guia de Instalação e Atualização do ByYou ESB Instalação do ByYou ESB Copyright 2010 TOTVS S.A. Todos os direitos reservados. Nenhuma parte deste documento pode ser copiada, reproduzida,
Sistemas Operacionais de Rede Linux - Gerenciamento de Arquivos
 Sistemas Operacionais de Rede Linux - Gerenciamento de Arquivos Conteúdo Programático Login e Logout Iniciando e Desligando o Sistema Tipos de arquivo Texto Binário Arquivos e Diretório Manipulação de
Sistemas Operacionais de Rede Linux - Gerenciamento de Arquivos Conteúdo Programático Login e Logout Iniciando e Desligando o Sistema Tipos de arquivo Texto Binário Arquivos e Diretório Manipulação de
Índice. Manual Backup Online. 03 Capítulo 1: Visão Geral
 Índice 03 Capítulo 1: Visão Geral 04 Capítulo 2: Conta de Usuário 04 Criação 08 Edição 09 Grupo de Usuários 10 Informações da Conta 12 Capítulo 3: Download do Backup Online Embratel 16 Capítulo 4: Cópia
Índice 03 Capítulo 1: Visão Geral 04 Capítulo 2: Conta de Usuário 04 Criação 08 Edição 09 Grupo de Usuários 10 Informações da Conta 12 Capítulo 3: Download do Backup Online Embratel 16 Capítulo 4: Cópia
Programação Web com Webdev 19 Julio Cesar Pedroso Conteúdo
 Conteúdo INTRODUÇÃO... 6 Como acessar a ajuda on line?... 6 Conhecendo o WebDev... 8 Iniciando o WebDev... 8 Ambiente de desenvolvimento... 8 O Editor... 8 A barra de menus... 10 Os botões... 10 Os painéis...
Conteúdo INTRODUÇÃO... 6 Como acessar a ajuda on line?... 6 Conhecendo o WebDev... 8 Iniciando o WebDev... 8 Ambiente de desenvolvimento... 8 O Editor... 8 A barra de menus... 10 Os botões... 10 Os painéis...
Gravação da quantidade de expostos por grupo homogêneo
 Gravação da quantidade de expostos por grupo homogêneo Produto : TOTVS + PPRARobot + PMedPPRACfg + 6.3.27.14/11.7.0.5 Chamado : TDURCI Data da publicação : 13/12/12 País(es) : Brasil Banco(s) de Dados
Gravação da quantidade de expostos por grupo homogêneo Produto : TOTVS + PPRARobot + PMedPPRACfg + 6.3.27.14/11.7.0.5 Chamado : TDURCI Data da publicação : 13/12/12 País(es) : Brasil Banco(s) de Dados
Java - Introdução. Professor: Vilson Heck Junior. vilson.junior@ifsc.edu.br
 Java - Introdução Professor: Vilson Heck Junior vilson.junior@ifsc.edu.br Agenda O que é Java? Sun / Oracle. IDE - NetBeans. Linguagem Java; Maquina Virtual; Atividade Prática. Identificando Elementos
Java - Introdução Professor: Vilson Heck Junior vilson.junior@ifsc.edu.br Agenda O que é Java? Sun / Oracle. IDE - NetBeans. Linguagem Java; Maquina Virtual; Atividade Prática. Identificando Elementos
OneDrive: saiba como usar a nuvem da Microsoft
 OneDrive: saiba como usar a nuvem da Microsoft O OneDrive é um serviço de armazenamento na nuvem da Microsoft que oferece a opção de guardar até 7 GB de arquivos grátis na rede. Ou seja, o usuário pode
OneDrive: saiba como usar a nuvem da Microsoft O OneDrive é um serviço de armazenamento na nuvem da Microsoft que oferece a opção de guardar até 7 GB de arquivos grátis na rede. Ou seja, o usuário pode
CONHECIMENTOS ESPECÍFICOS TÉCNICO DE LABORATÓRIO / ÁREA INFORMÁTICA
 CONHECIMENTOS ESPECÍFICOS TÉCNICO DE LABORATÓRIO / ÁREA INFORMÁTICA 26. Considerando o sistema de numeração Hexadecimal, o resultado da operação 2D + 3F é igual a: a) 5F b) 6D c) 98 d) A8 e) 6C 27. O conjunto
CONHECIMENTOS ESPECÍFICOS TÉCNICO DE LABORATÓRIO / ÁREA INFORMÁTICA 26. Considerando o sistema de numeração Hexadecimal, o resultado da operação 2D + 3F é igual a: a) 5F b) 6D c) 98 d) A8 e) 6C 27. O conjunto
Manual de Instalação da Plataforma Scorpion. 1. Como conectar a Plataforma Scorpion com a Xilinx Starter-3E kit
 Manual de Instalação da Plataforma Scorpion 1. Como conectar a Plataforma Scorpion com a Xilinx Starter-3E kit Para começar a ler este manual, é bom que você conheça os componentes desta conexão. Plataforma
Manual de Instalação da Plataforma Scorpion 1. Como conectar a Plataforma Scorpion com a Xilinx Starter-3E kit Para começar a ler este manual, é bom que você conheça os componentes desta conexão. Plataforma
Manual de Instalação SafeSign Linux
 Manual de Instalação SafeSign Linux Ubuntu 12.04 LTS 32-bit Ubuntu 12.04 LTS 64-bit Red Hat 5 (5.8) 32-bit Red Hat 5 (5.8) 64-bit Red Hat 6 (6.3) 32-bit Red Hat 6 (6.3) 64-bit Morpho Manual de Instalação
Manual de Instalação SafeSign Linux Ubuntu 12.04 LTS 32-bit Ubuntu 12.04 LTS 64-bit Red Hat 5 (5.8) 32-bit Red Hat 5 (5.8) 64-bit Red Hat 6 (6.3) 32-bit Red Hat 6 (6.3) 64-bit Morpho Manual de Instalação