PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA ELÉTRICA - TELECOMUNICAÇÕES LUIZ HENRIQUE GIOVANINI MARREGA
|
|
|
- Adriana Bastos Santana
- 8 Há anos
- Visualizações:
Transcrição
1 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA ELÉTRICA - TELECOMUNICAÇÕES LUIZ HENRIQUE GIOVANINI MARREGA SISTEMA PARA AVALIAÇÃO DOS EFEITOS DA REABILITAÇÃO DA MARCHA EM PORTADORES DE AFECÇÕES NEUROLÓGICAS CURITIBA 2012

2 LUIZ HENRIQUE GIOVANINI MARREGA SISTEMA PARA AVALIAÇÃO DOS EFEITOS DA REABILITAÇÃO DA MARCHA EM PORTADORES DE AFECÇÕES NEUROLÓGICAS Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica - Telecomunicações da Pontifícia Universidade Católica do Paraná, como requisito parcial à obtenção do título de Engenheiro Eletricista. Orientador: Prof.ª Dr.ª Elisangela Ferretti Manffra. CURITIBA 2012

3 PÁGINA RESERVADA PARA FICHA CATALOGRÁFICA QUE DEVE SER CONFECCIONADA APÓS APRESENTAÇÃO E ALTERAÇÕES SUGERIDAS PELA BANCA EXAMINADORA. DEVE SER IMPRESSA NO VERSO DA FOLHA DE ROSTO

4 LUIZ HENRIQUE GIOVANINI MARREGA SISTEMA PARA AVALIAÇÃO DOS EFEITOS DA REABILITAÇÃO DA MARCHA EM PORTADORES DE AFECÇÕES NEUROLÓGICAS Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Elétrica - Telecomunicações da Pontifícia Universidade Católica do Paraná, como requisito parcial à obtenção do título de Engenheiro Eletricista. COMISSÃO EXAMINADORA Prof.ª Dr.ª Elisangela Ferretti Manffra (Orientadora) Pontifícia Universidade Católica do Paraná Prof.º Dr.º James Alexandre Baraniuk Pontifícia Universidade Católica do Paraná Prof.º Dr.º Marcelo Eduardo Pellenz Pontifícia Universidade Católica do Paraná Curitiba, de de 2012.

5 À minha mãe Margaret, ao meu irmão Lucas e à minha namorada Adriana, aqueles que diariamente me demonstram seu amor incondicional.

6 AGRADECIMENTOS A Deus, primeiramente, pelo dom da vida e por estar ao meu lado no cumprimento de cada desafio imposto nesta jornada acadêmica. Aos momentos de vitória, eu agradeço, com àqueles de derrota, eu amadureço. A minha mãe Margaret, que sempre me ofereceu todo o apoio e incentivo necessários para que eu chegasse até aqui. Obrigado pelo carinho e cuidado sem precedentes que você sempre teve por mim. Amo você acima de tudo. A minha namorada e melhor amiga Adriana Lívia, que vem me tornando uma pessoa melhor a cada dia que passa. Obrigado por esses mais de três anos de parceria, companheirismo, diversão e carinho sem iguais. Obrigado por sempre me ouvir e sabiamente me aconselhar nos momentos de dificuldade, bem como por me elogiar e incentivar nos momentos de glória. Agradeço também sua paciência e compreensão ao me dividir com os livros e cadernos por tantos e tantos finais de semana. Como eu sempre te digo, você é a minha vida. A minha orientadora, Prof.ª Dr.ª Elisangela Manffra, pela paciência e dedicação que sempre teve comigo, contribuindo para a evolução do meu saber e da minha maturidade científica. Obrigado por ter me esculpido habilidosamente nesses mais de dois anos em que viemos trabalhando juntos. Ao Prof.º Dr.º James Baraniuk, que sempre acreditou neste trabalho e, por diversas vezes, dedicou boa parte do seu tempo para colaborar com o desenvolvimento do mesmo. Obrigado pelas excelentes idéias em termos de projeto e pelo seu constante encorajamento ao uso de novas tecnologias, desbravando os préconceitos dos alunos e contribuindo para seu amadurecimento técnico-científico. Ao Prof.º Dr.º Marcelo Pellenz, por aceitar avaliar este trabalho e por ter contribuído com boas idéias para o desenvolvimento do mesmo.

7 A empresa HIT Tecnologia em Saúde, que sempre se mostrou firme na postura de apoiar seus funcionários quanto à realização/conclusão suas atividades acadêmicas com sucesso. Obrigado pelas boas idéias de projeto e por oferecer abertamente sua estrutura para o desenvolvimento do hardware e do software deste trabalho. A voluntária de pesquisa, que aceitou participar do processo de avaliação prática do sistema desenvolvido neste projeto. Obrigado por dispor parte de seu tempo em prol deste estudo.

8 Mas tenho medo do que é novo e tenho medo de viver o que não entendo - quero sempre ter a garantia de pelo menos estar pensando que entendo, não sei me entregar à desorientação. Clarice Lispector, 1972

9 RESUMO A reabilitação da marcha (capacidade de caminhar) é uma das etapas mais importantes na reabilitação de afecções neurológicas, tais como o acidente vascular encefálico (AVE), a paralisia cerebral (PC) e a lesão medular (LM). Isso porque a capacidade de deambulação é um importante fator de independência funcional, torna o indivíduo mais ativo fisicamente e o auxilia na manutenção do seu estado geral de saúde. O treino locomotor com suporte de peso (TLSP) é uma técnica de reabilitação da marcha que tem o objetivo de estimular a recuperação da capacidade muscular, evitar a atrofia e reaver a capacidade de sustentar um percentual do peso corporal. O objetivo deste trabalho consiste em projetar, desenvolver e avaliar um sistema de mensuração e monitoramento de sinais biomecânicos relevantes no TLSP, que funcione em conjunto com o suporte de peso corporal (SPC) existente no Laboratório de Engenharia de Reabilitação (LER) da PUCPR. Para este projeto, foram desenvolvidos sensores de ângulos articulares e de contato do pé com o solo, bem como circuitos eletrônicos de acondicionamento para estes sensores e para as células de carga (sensores de força) do SPC. Foi desenvolvida também uma interface gráfica virtual para monitorar em tempo real os sinais mensurados pelos sensores. O sistema, na sua forma completa, foi submetido a testes de bancada e também a uma avaliação prática com o auxílio de uma voluntária de pesquisa (22 anos), que realizou uma sessão de TLSP utilizando os sensores construídos (após aprovação do Comitê de Ética em Pesquisa da PUCPR, parecer nº 6147). Com os testes de bancada, foi possível confirmar a linearidade do equipamento antes de utilizá-lo na participante do estudo. A avaliação prática do sistema permitiu constatar a praticidade dos novos sensores, a robustez do hardware ao ruído e a eficiência da interface gráfica no monitoramento biomecânico da participante em tempo real. O sistema de aquisição de sinais desenvolvido foi capaz de, em conjunto com o SPC, monitorar os sinais biomecânicos de uma voluntária da pesquisa durante uma sessão de TLSP. Palavras-chave: treino locomotor com suporte de peso; suporte de peso corporal; monitoramento biomecânico.
 é uma técnica de reabilitação da marcha que tem o objetivo de estimular a recuperação da capacidade muscular, evitar a atrofia e reaver a capacidade de")
10 ABSTRACT The gait rehabilitation is an important step in the rehabilitation process of neurological diseases, such as stroke, cerebral palsy and spinal cord injury. That is because the ability to walk is very important for the subject s functional independency and helps in maintaining their general health. The body weight support training (BWST) is a method for rehabilitation with the aim of stimulating recovery of muscle capacity in order to prevent atrophy. Moreover, it might restore the capacity of supporting part of body weight. The aim of this work is design, develop and evaluate a monitoring system of biomechanics signals investigated in BWST, capable to work in conjunction with a body weight support (BWS) located at Rehabilitation Engineer Laboratory of PUCPR. In this study, there was developed joint angle and footswitches sensors, electronic circuits for this instruments and also for the load cells (force sensors) located in the BWS. There was developed a graphical user interface with the aim of monitoring, in real time, the signals measured by sensors. The complete system has been tested in laboratory and in a practical situation, with the help of a research volunteer (22 years old) that has realized a BWST session using our sensors (Research Ethics Committee approval, 6147). With the laboratory tests, we have verified the system linearity before tests it on a healthy individual. The tests with the volunteer have shown the sensors practicality, the hardware strength against noise and the efficiency of graphical user interface during the real time monitoring of healthy subject biomechanics signals. Thus, the system was capable to work in conjunction with BWS and monitoring the biomechanics signals of a volunteer during a BWST session. Key-words: body weight support training; body weight support; biomechanical signals monitoring.

11 LISTA DE ILUSTRAÇÕES Figura 1 Diagrama em blocos do sistema de monitoramento de sinais biomecânicos desenvolvidos no projeto final de curso Figura 2 Representação ilustrativa (a) do sensor de ângulo desenvolvido neste projeto e (b) do seu posicionamento sobre o membro inferior Figura 3 Posicionamento do sensor de ângulo articular sobre o membro inferior direito com o auxílio das tiras elásticas e velcro Figura 4 Diagrama em blocos do circuito de acondicionamento dos sensores de ângulo Figura 5 Diagrama esquemático do estágio amplificador do circuito dos sensores de ângulos articulares Figura 6 Diagrama esquemático do filtro Butterworth de 2ª ordem do tipo passabaixas, frequência de corte de 40 Hz Figura 7 Mapeamento da pressão plantar de adultos jovens durante a caminhada Figura 8 Comparação da distribuição da pressão plantar em sujeitos saudáveis e hemiparéticos durante a realização da marcha Figura 9 Sensores de contato do pé direito com o solo Figura 10 Diagrama em blocos do circuito de acondicionamento dos sensores de contato do pé com o solo Figura 11 Diagrama esquemático do estágio de amplificação de sinais do circuito dos sensores de contato com o solo Figura 12 Suporte de peso corporal utilizado neste projeto Figura 13 Diagrama de blocos do circuito eletrônico de acondicionamento das células de carga Figura 14 Diagrama esquemático do estágio de amplificação utilizado no circuito das células de carga Figura 15 Diagrama esquemático do estágio divisor de tensão utilizado no circuito das células de carga Figura 16 Caixa de protótipo da placa principal em vista (a) frontal e (b) lateral Figura 17 Caixa de protótipo da placa das células de carga das mãos Figura 18 Diagrama esquemático do circuito divisor de tensão utilizado para monitorar a tensão das baterias

12 Figura 19 Associação em série dos resistores do circuito divisor de tensão Figura 20 Arduino Mega 2560 utilizado na digitalização dos sinais mensurados pelos sensores deste projeto final de curso Figura 21 Esquema em blocos da comunicação entre os sensores, circuitos de acondicionamento, Arduino, módulo Bluetooth e um computador Figura 22 Fluxograma de tarefas executadas pelo Arduino após a gravação do firmware Figura 23 - Interface gráfica desenvolvida para o monitoramento dos dados biomecânicos Figura 24 Representação das tarefas realizadas pela interface gráfica em forma de fluxograma Figura 25 - Representação gráfica dos ângulos articulares pela interface virtual. Neste caso, o valor dos ângulos esquerdo e direito corresponde a, respectivamente, 0 e 70 graus Figura 26 - Representação gráfica da força de compressão em membros superiores pela interface virtual. Neste caso, o valor da força nas mãos direita e esquerda corresponde a, respectivamente, 20 e 10 kgf Figura 27 - Representação gráfica do contato dos pés com o solo pela interface virtual. Neste caso, os pontos dos calcanhares apresentam força máxima de contato com o solo, enquanto que os pontos do ante-pé direito e esquerdo apresentam força intermediária. Nas regiões dos dedões, não existe nenhuma força de contato Figura 28 Resposta em frequência dos estágios de filtragem do circuito dos eletrogoniômetros Figura 29 Curva de calibração do eletrogoniômetro da perna direita Figura 30 Curva de calibração do eletrogoniômetro da perna esquerda Figura 31 Resposta em frequência dos filtros do sensor de contato do pé direito com o solo Figura 32 Resposta em frequência dos filtros do sensor de contato do pé esquerdo com o solo Figura 33 Resposta em frequência dos filtros do circuito das células de carga Figura 34 Curva de calibração da célula de carga da mão direita Figura 35 Curva de calibração da célula de carga da mão esquerda Figura 36 Curva de calibração da célula de carga do colete... 46

13 LISTA DE TABELAS Tabela 1 Análise FMEA deste projeto final de curso Tabela 2 - Relação das fontes de custeio de cada item utilizado na parte física do projeto Tabela 3 Relação das fontes de custeio dos itens utilizado na parte virtual do projeto Tabela 4 Cronograma das atividades previstas para o desenvolvimento do projeto Tabela 5 Períodos reais de execução das atividades do projeto Tabela 6 Níveis de tensão mensurados na entrada e na saída dos estágios de amplificação do circuito dos eletrogoniômetros Tabela 7 - Relação entre os valores da frequência de corte real e de projeto dos filtros dos circuitos dos eletrogoniômetros Tabela 8 - Relação entre os valores da frequência de corte real e de projeto dos filtros dos circuitos dos eletrogoniômetros Tabela 9 - Relação entre os ganhos de operação e de projeto dos amplificadores de instrumentação Tabela 10 Relação entre os valores da frequência de corte real e de projeto dos filtros dos circuitos das células de carga

14 LISTA DE ABREVIATURAS E SIGLAS AVE EENN LER LM OMS PC PUCPR SPC TLSP Acidente Vascular Encefálico Estimulação Elétrica Neuromuscular Laboratório de Engenharia de Reabilitação Lesão Medular Organização Mundial da Saúde Paralisia Cerebral Pontifícia Universidade Católica do Paraná Suporte de Peso Corporal Treino Locomotor com Suporte de Peso

15 SUMÁRIO 1. INTRODUÇÃO PROBLEMATIZAÇÃO OBJETIVOS Objetivo Geral Objetivos Específicos REFERENCIAL TEÓRICO EFEITOS DO TLSP OBSERVADOS EM AFECÇÕES NEUROLÓGICAS VARIÁVEIS BIOMECÂNICAS RELEVANTES PARA A AVALIAÇÃO DO TLSP METODOLOGIA ÂNGULOS ARTICULARES Sensores de ângulos articulares Circuito eletrônico de acondicionamento Calibração dos eletrogoniômetros PRESSÃO PLANTAR Sensores de contato do pé com o solo Circuito eletrônico de acondicionamento FORÇA SOBRE MEMBROS INFERIORES E SUPERIORES Células de carga Circuitos de acondicionamento Calibração das células de carga CONFECÇÃO E ARMAZENAMENTO DO HARDWARE Monitoramento da tensão de alimentação dos circuitos Módulo de digitalização de dados COMUNICAÇÃO SEM FIO ENTRE O HARDWARE E O COMPUTADOR MONITORAMENTO DOS DADOS NO COMPUTADOR SISTEMA COMPLETO: TESTES DE BANCADA E VALIDAÇÃO ANÁLISE DE RISCOS RECURSOS E CRONOGRAMA RECURSOS CRONOGRAMA DO PROJETO RESULTADOS... 41

16 5.1. SENSORES DE ÂNGULOS ARTICULARES E CIRCUITO DE ACONDICIONAMENTO SENSORES DE CONTATO DO PÉ COM O SOLO E CIRCUITO DE ACONDICIONAMENTO CÉLULAS DE CARGA E CIRCUITO DE ACONDICIONAMENTO FUNCIONAMENTO DO SISTEMA ASPECTOS GERAIS DISCUSSÃO CONCLUSÃO REFERÊNCIAS ANEXOS... 57

17 1 1. INTRODUÇÃO A lesão medular (LM), a paralisia cerebral (PC) e o acidente vascular encefálico (AVE) são afecções neurológicas que, de maneira geral, comprometem o desempenho funcional do indivíduo, prejudicando-o (ou até mesmo impedindo-o) na realização de tarefas motoras básicas como a deambulação e a manutenção do equilíbrio. Esta perda da independência funcional, resultado dos distúrbios fisiológicos causados pela doença, têm impacto em fatores físicos, psicológicos e sociais na vida do sujeito acometido (PEREIRA, 2009). Dentre as técnicas de reabilitação da marcha, tais como a hidroterapia e a estimulação elétrica neuromuscular (EENM) (PEREIRA, 2009), destaca-se o treino locomotor com suporte parcial de peso (TLSP) que explora vantagens sensoriais da coluna vertebral essenciais para a locomoção, tais como o estímulo dos receptores de carga, estímulo aferente da articulação do quadril e a coordenação entre os segmentos da perna e coxa (HARKEMA et al., 1997). Apesar de ter sido inicialmente proposto e aplicado com sucesso para reabilitação da LM, este método tem sido aplicado em outras afecções neurológicas que comprometem a deambulação, tais como a PC (MUTLU et al., 2009; MATTERN-BAXTER, 2009) e o AVE (HESSE et al., 2001). O TLSP consiste na sustentação parcial do peso corporal do indivíduo, com auxílio de um sistema de suporte de peso corporal (SPC), que o mantém na posição ortostática (em pé) enquanto seus membros inferiores são movimentados reproduzindo os movimentos da marcha sobre uma esteira elétrica (WILSON et al., 2000) ou sobre o solo (PATIÑO et al., 2007; PILLAR et al., 1991). A movimentação das pernas pode ser feita de forma manual ou automática, com auxílio de órteses robóticas. Pereira (2009) afirma que, ao longo das sessões de treino, um padrão locomotor é induzido no sujeito acometido e, dependendo do comprometimento da lesão, é possível restabelecer a capacidade de sustentação autônoma do peso corporal. Em seu projeto de mestrado, Pereira (2009) desenvolveu um suporte de peso corporal (SPC), aparato essencial para a aplicação do treino locomotor, bem como um sistema de aquisição de sinais biomecânicos e eletromiográficos, utilizado para avaliar a evolução dos pacientes ao longo das
 (PEREIRA, 2009), destaca-se o treino locomotor com suporte parcial de peso (TLSP)")
18 2 sessões de treino. Apesar de ter apresentado funcionamento satisfatório, o sistema de aquisição de sinais foi aprimorado e customizado para a população com LM pelo autor deste relatório durante um projeto de PIBIC. No entanto, durante testes do sistema aprimorado com uma voluntária de pesquisa (após a aprovação do Comitê de Ética em Pesquisa da PUCPR, parecer nº 6147), foi possível perceber falhas em relação aos novos sensores e também à robustez do sistema ao ruído. Assim, neste projeto, foi proposto um novo sistema de monitoramento biomecânico que suprimisse as falhas do sistema anterior no intuito de prover confiabilidade aos sinais biológicos mensurados, já que eles contêm informações sobre os efeitos do TLSP na reabilitação do sujeito. Nas sessões seguintes deste documento, os módulos físico (hardware) e virtual (software) que constituem o novo sistema proposto neste estudo serão descritos detalhadamente, tanto em seu aspecto construtivo como tecnológico. Serão descritas também as etapas de teste e de validação deste sistema. Por fim, após realizar um mapeamento dos riscos existentes no projeto, serão discutidas as etapas cumpridas durante o ano em relação ao cronograma estabelecido Problematização Segundo dados da Organização Mundial da Saúde (OMS), aproximadamente 10% de uma população em tempos de paz é acometida de algum tipo de deficiência. De acordo com dados do Censo Demográfico de 2000, 14,5% da população brasileira é deficiente, sendo 4,1% destes deficientes físicos. Entre estes brasileiros, em torno nove milhões trabalham, e uma parte deles (4,9 milhões) possui uma renda de até dois salários mínimos, estando inseridos principalmente no setor de serviços (TEXEIRA; OLIVEIRA, 2004). Este número pode ser ampliado se forem dadas condições para esta população desenvolver seu potencial intelectual e físico. Para tanto, a reabilitação é fundamental. Durante as sessões de TLSP no processo de reabilitação da marcha, é necessário quantificar o progresso dos indivíduos acometidos a fim de se avaliar a eficiência do método para cada paciente. Isso pode ser feito através da análise de variáveis biomecânicas dos sujeitos, coletadas durante as sessões de treino por um sistema de aquisição de sinais.

19 3 O equipamento Lokomat (Hocoma) é considerado o padrão ouro na reabilitação da marcha aplicando o TLSP. Este sistema consiste em um SPC automático, que utiliza órteses robóticas para reproduzir os movimentos da caminhada com os membros inferiores do paciente sobre uma esteira. Além disso, o Lokomat possui sensores de variáveis biomecânicas e um esquema de realimentação visual ao paciente através de um monitor. No entanto, o custo deste equipamento excede R$ ,00 (um milhão de reais). Segundo Pereira (2009), devido ao custo elevado de sistemas como o Lokomat, ambientes de reabilitação da marcha através do TLSP se limitam, em geral, a locais de pesquisa. Dessa forma, o sistema de monitoramento de sinais biomecânicos de baixo custo proposto neste projeto final de curso, em conjunto com o SPC de baixo custo desenvolvido por Pereira (2009), pode contribuir na disseminação de ambientes de reabilitação da marcha em locais públicos, tais como hospitais e clínicas de reabilitação. Com isso, seria possível ampliar a uma quantidade significativa de indivíduos acometidos os benefícios fisiológicos, sociais e psicológicos que programas de reabilitação podem proporcionar OBJETIVOS Objetivo Geral Desenvolver um sistema de monitoramento biomecânico wireless do treino locomotor com suporte de peso Objetivos Específicos Os objetivos específicos deste trabalho são: (a) Desenvolver e caracterizar sensores de ângulos articulares dos joelhos e de contato do pé com o solo; (b) Desenvolver e caracterizar um hardware de acondicionamento, digitalização e transmissão sem fio dos sinais dos sensores e das células de carga do SPC para um computador; (c) Desenvolver uma interface gráfica computacional para monitorar os dados biomecânicos em tempo real.
. Segundo Pereira (2009), devido ao custo elevado de sistemas como o Lokomat, ambientes de reabilitação da marcha através do TLSP se limitam, em geral, a locais de pesquisa.")
20 4 2. REFERENCIAL TEÓRICO 2.1. Efeitos do TLSP observados em afecções Neurológicas De acordo com Pereira (2009), a lesão medular é decorrente de danos causados na coluna vertebral e pode limitar as funções motoras e sensoriais do indivíduo total ou parcialmente, dependendo do nível da lesão. Os danos na coluna podem ser de origem traumática (causados por arma de fogo, arma branca, acidentes de trânsito, quedas, etc.) e também de origem nãotraumática, como por tumores na medula. Pesquisas sobre o TLSP aplicado na LM mostram resultados motores como aumento da atividade eletromiográfica de membros inferiores e até a recuperação da capacidade de deambulação independente em casos de lesão incompleta (DIETZ et al., 1998; DOBKIN et al., 2007; HARKEMA et al., 1997, DIETZ, HARKEMA, 2004). Resultados positivos relativos ao estado de saúde e condicionamento físico na lesão medular também tem sido observados (DUTRA, 2009). Finalmente, o TLSP também pode refletir na independência funcional. Assim, mesmo que o indivíduo não possa recuperar a capacidade de deambular sem auxílio da cadeira de rodas, pode usufruir dos benefícios fisiológicos e emocionais que as sessões do TLSP proporcionam. De acordo com Wolfe (2000), o AVE consiste em uma lesão encefálica seguida de alterações neurológicas, causado por falhas no suprimento sanguíneo do encéfalo. O indivíduo acometido, em geral, apresenta diversas seqüelas que comprometem o controle do equilíbrio postural, tais como: distúrbios nos mecanismos de reflexo postural normal, espasticidade, fraqueza muscular, assimetria corporal e falta de sequência na ativação muscular (WOLFE, 2000; CHEN et al., 2005; SULLIVAN et al., 2007; SIBLEY et al., 2009). A literatura aponta que portadores de seqüelas pós-ave também podem se beneficiar com protocolos de TLSP (HESSE, 2008; HESSE et al., 2001). Por exemplo, observou-se em um estudo que a aplicação do TLSP antes do paciente começar a treinar a marcha sobre o solo resultou em maior simetria e eficiência na sua execução (MCCAIN, 2008). A PC é causada por uma lesão não progressiva do cérebro imaturo, causando desordem ou seqüela da postura e do movimento. Esta afecção
 e também de origem nãotraumática, como por tumores na medula.")
21 5 causa danos motores, ou seja, dificuldade no controle postural e equilíbrio (EICHER; BATSHAW, 1993, p. 13). De acordo com Bobath (1969, p. 11), a lesão que atinge o cérebro quando este ainda é imaturo infere no desenvolvimento motor normal da criança. No contexto do treino locomotor aplicado à PC, são relatados ganhos na eficiência da deambulação com suporte de peso. Roesler et al. (2005) observaram que a participante de seu estudo foi capaz de permanecer deambulando por 10 minutos na esteira com o suporte de peso corporal, enquanto que normalmente ela só conseguia executar 33 passos. Mais recentemente, Provost et al. (2007), em um estudo com seis crianças portadoras de PC, observaram aumento na velocidade e menor consumo de energia da marcha após um programa de TLSP. Mattern-Baxter (2009), revisando trabalhos que avaliaram outras variáveis como equilíbrio, velocidade da marcha e resistência, concluiu que o TLSP pode trazer benefícios para a paralisia cerebral Variáveis biomecânicas relevantes para a avaliação do TLSP De acordo com Pereira et al. (2009), devido ao papel dos receptores de carga no TLSP e sua dependência com as posições articulares do sujeito, é importante monitorar simultaneamente durante as sessões de treino a carga sobre membros inferiores do indivíduo e parâmetros cinemáticos da marcha, tais como ângulos articulares dos joelhos e contato do pé com o solo. O SPC desenvolvido por Pereira (2009) contempla três células de carga, estando duas delas acopladas nos apoios das mãos da esteira elétrica e a outra entre o colete de sustentação e os cabos e aço. Com o auxílio destes dispositivos, é possível estimar a carga sobre os membros inferiores do indivíduo durante o treino. Os ângulos articulares dos joelhos podem ser utilizados para identificar as fases de apoio e balanço da marcha durante o treino locomotor. Segundo Pereira (2009), através da análise desta variável biomecânica, estudos constataram que o SPC altera parcialmente as características da marcha. É possível mensurar estes ângulos por meio de eletrogoniômetros (MARREGA et
22 6 al., 2012; PEREIRA, 2009; PEREIRA et al., 2009; YAEDU, 2011; YAEDU et al., 2010). Durante o TLSP, é possível averiguar o perfil de distribuição plantar do paciente utilizando footswitches ou sensores de contato do pé com o solo (PEREIRA, 2009; PEREIRA et al., 2009). Para identificar as fases da marcha, os sinais destes sensores podem ser correlacionados com os sinais dos ângulos articulares e da carga sustentada pelo SPC.
 e outra virtual (software). Figura 1 Diagrama em blocos do sistema de monitoramento de sinais biomecânicos desenvolvidos no projeto final de curso.")
23 7 3. METODOLOGIA O sistema de monitoramento biomecânico da reabilitação da marcha desenvolvido neste projeto final de curso, cujo diagrama construtivo é mostrado em blocos na Figura 1, é composto essencialmente por uma parte física (hardware) e outra virtual (software). Figura 1 Diagrama em blocos do sistema de monitoramento de sinais biomecânicos desenvolvidos no projeto final de curso. Fonte: o autor, Nas sessões seguintes deste documento, será descrito em detalhes cada bloco do sistema apresentado na Figura 1 em seu aspecto construtivo e tecnológico.
 articulado por duas hastes de fenolite.")
24 Ângulos articulares Sensores de ângulos articulares Neste projeto, foram desenvolvidos dois eletrogoniômetros no intuito de mensurar os ângulos articulares do paciente durante as sessões de treino. Cada um destes aparelhos consiste em um potenciômetro linear de precisão de 100kΩ (marca Bourns) articulado por duas hastes de fenolite. Uma das hastes, denominada haste fixa, foi colada entre o eixo variável e a parte superior do potenciômetro; a outra, denominada haste móvel, foi colada no eixo variável do componente (Figura 2-a). Nos dois casos, a fixação foi realizada com auxílio de solda plástica (marca POXIPOL). A Figura 2-b ilustra o posicionamento adequado do sensor sobre o membro inferior de um paciente. (a) (b) Figura 2 Representação ilustrativa (a) do sensor de ângulo desenvolvido neste projeto e (b) do seu posicionamento sobre o membro inferior. Fonte: o autor, 2012.
25 9 Em seguida, a superfície inferior das hastes dos sensores foi revestida com emborrachado, um material confortável e de fácil higienização, adequado para realizar contato direto com os membros inferiores do paciente. Por fim, com o auxílio da solda plástica (POXIPOL), foram coladas tiras de elástico nas hastes de cada sensor. Sobre os elásticos, foram costuradas tiras de velcro. Dessa forma, as hastes fixa e móvel do eletrogoniômetro são posicionadas e presas na coxa e na perna do paciente, respectivamente, através das tiras elásticas e do velcro (Figura 3). Figura 3 Posicionamento do sensor de ângulo articular sobre o membro inferior direito com o auxílio das tiras elásticas e velcro. Fonte: o autor, 2012.
26 Circuito eletrônico de acondicionamento O circuito eletrônico desenvolvido para acondicionar os sinais dos sensores de ângulo é apresentado em diagrama de blocos na Figura 4. Figura 4 Diagrama em blocos do circuito de acondicionamento dos sensores de ângulo. Fonte: o autor, Conforme ilustra a Figura 4, os eletrogoniômetros são conectados a um circuito eletrônico cujo primeiro estágio, o de alimentação, fornece uma tensão de alimentação de 5 Volts para os potenciômetros dos sensores. Foram realizados testes de bancada para verificar a faixa de excursão em tensão dos sinais (1) e (4) com os sensores de ângulo nas situações extremas: membros inferiores estendidos e flexionados. Em seguida, foram desenvolvidos dois estágios amplificadores com o amplificador operacional MCP6L04T (Microchip). Esses circuitos foram projetados para maximizar a excursão dos níveis de tensão dos sinais (1) e (4) da Figura 4, na faixa compreendida entre zero e 5 Volts. Para isso, foi utilizado um amplificador não-inversor (PERTENCE JÚNIOR, 2003) com um esquema de tensão de offset, conforme ilustra a Figura 5.
27 11 Figura 5 Diagrama esquemático do estágio amplificador do circuito dos sensores de ângulos articulares. Fonte: o autor, Para um determinado nível de tensão na entrada do amplificador operacional, a tensão de saída é dada por: = 1+, (1) onde a relação de resistores e representa o ganho do amplificador e é a tensão de offset, gerada com o auxílio de um trimpot e um amplificador operacional MCP6L04T (Microchip) na configuração seguidor de tensão (PERTENCE JÚNIOR, 2003). Utilizando e igual a 57kΩ e 3kΩ respectivamente, e ajustando a tensão em 0,96 Volts, a tensão de saída do amplificador será: = , (2) =20 18,24 (3)
28 12 Assim, através de testes de bancada, foi verificada a tensão de saída dos amplificadores (pontos (2) e (5) da Figura 4) para os sensores de ângulo nas posições de membro inferior estendido e flexionado. Por fim, foram desenvolvidos estágios de filtragem para os sinais dos eletrogoniômetros direito e esquerdo. Os circuitos correspondem a filtros Butterworth de 2ª ordem do tipo passa-baixas (PERTENCE JÚNIOR, 2003) com frequência de corte de 40 Hz, construídos com o amplificador operacional MCP6L04T (Microchip), conforme ilustra a Figura 6. Figura 6 Diagrama esquemático do filtro Butterworth de 2ª ordem do tipo passa-baixas, frequência de corte de 40 Hz. Fonte: o autor, Para verificar a resposta em frequência dos filtros, diversos sinais senoidais de tensão com 1 Volt de pico e frequências variadas foram inseridos na entrada dos estágios de filtragem, com o auxílio de um gerador de funções. Nas saídas, mensurou-se a amplitude das senóides com um osciloscópio. Dessa forma, a relação entre a amplitude das senóides de saída e entrada foi utilizada para calcular o ganho do filtro na faixa de frequências que compreende desde zero até 100 Hz. A frequência de corte de operação foi estimada através do ponto no qual a amplitude da senóide de saída possui 70,7% da amplitude da senóide de entrada (PERTENCE JÚNIOR, 2003).
29 Calibração dos eletrogoniômetros Os sensores de ângulo deste projeto foram submetidos a um procedimento de calibração, que visa investigar linearidade no funcionamento dos mesmos em conjunto com o circuito de acondicionamento, bem como levantar a relação matemática entre o ângulo articular e o nível de tensão mensurado pelo sensor. Neste teste, a haste móvel de cada um dos sensores foi deslocada desde zero graus até 100 graus, em passos de 10 graus. Para cada posição angular, o sinal na saída do circuito foi mensurado com o auxílio de um multímetro. Em seguida, utilizando o software Excel, foram traçadas as curvas de tensão versus posição angular para cada um dos sensores, calculados os coeficientes de determinação para cada curva e estimadas as equações da reta, através da regressão linear Pressão Plantar Sensores de contato do pé com o solo Diversos estudos na literatura procuram diferenciar dois grupos distintos de sujeitos através da distribuição da pressão plantar ao longo de uma atividade física. Hessert et al. (2005) compararam o perfil de distribuição da pressão plantar de adultos jovens e idosos ao longo da caminhada (Figura 7). Meyring et al. (1997) fizeram uma comparação semelhante, porém, para um grupo de indivíduos saudáveis e outro de hemiparéticos (Figura 8). Neste projeto, com o objetivo de detectar as fases da marcha dos pacientes ao longo das sessões de treino locomotor, foram desenvolvidos dois sensores de contato do pé com solo. Cada um destes aparelhos consiste em uma palmilha de material emborrachado, confeccionada no tamanho 36 do padrão brasileiro, contendo quatro sensores de pressão FlexiForce A (TEKSCAN) sensíveis na faixa de zero até 11,36 kg. O posicionamento dos sensores nas palmilhas foi baseado no mapeamento realizado pela literatura (HESSERT et al., 2005; MEYRING et al., 1997), buscando regiões com pressão plantar significativa ao longo de uma caminhada. As áreas escolhidas para detecção das fases da marcha foram o ante-pé, o retro-pé e a região do dedão (Figura 9).
30 14 Figura 7 Mapeamento da pressão plantar de adultos jovens durante a caminhada. Fonte: Hessert et al., Figura 8 Comparação da distribuição da pressão plantar em sujeitos saudáveis e hemiparéticos durante a realização da marcha. Fonte: Meyring et al., 1997.
31 15 Figura 9 Sensores de contato do pé direito com o solo. Fonte: o autor, Circuito eletrônico de acondicionamento O circuito eletrônico desenvolvido para acondicionar os sinais dos sensores de contato do pé com o solo é apresentado em diagrama de blocos na Figura 10. Figura 10 Diagrama em blocos do circuito de acondicionamento dos sensores de contato do pé com o solo. Fonte: o autor, 2012.
32 16 Conforme ilustra a Figura 10, cada um dos quatro sensores de pressão das duas palmilhas é conectado a um circuito eletrônico, cujo primeiro estágio é o de amplificação de sinais, mostrado na Figura 11. Figura 11 Diagrama esquemático do estágio de amplificação de sinais do circuito dos sensores de contato com o solo. Fonte: o autor, O estágio de amplificação consiste em um amplificador operacional MCP6L04T (Microchip) na configuração não-invesora. O nível da tensão de entrada foi fixado em 0,5 Volts com o auxílio de um trimpot. O amplificador modula o sinal de entrada em virtude da resistência do sensor de pressão, conforme a expressão abaixo: = +1 (4) Em conjunto com, a resistência (utilizada como 910kΩ) determina o ganho do amplificador. O valor de é função da pressão exercida no sensor. De acordo com o manual do fabricante (TEKSCAN, 2009), quando nenhuma pressão é exercida no sensor, este possui aproximadamente 8MΩ de resistência; no entanto, quando a pressão máxima é exercida no mesmo, este apresenta cerca de 130kΩ. Dessa forma, é possível estimar o nível de tensão na saída do amplificador para nenhuma pressão e para pressão máxima sobre o sensor, substituindo por 8MΩ e 130kΩ em (4) respectivamente, tal como:
33 17 =0, =4,89 (5) =0, =0,57 (6) Foram desenvolvidos estágios de filtragem para os sinais de cada um dos oito sensores de pressão, idênticos aqueles construídos no circuito dos eletrogoniômetros deste projeto. Os circuitos correspondem a filtros Butterworth de 2ª ordem do tipo passa-baixas (PERTENCE JÚNIOR, 2003) com frequência de corte de 40 Hz, construídos com o amplificador operacional MCP6L04T (Microchip). Foram realizados testes de bancada com o circuito de acondicionamento das palmilhas para levantar a resposta em frequência dos filtros, bem como as frequências de corte de operações dos mesmos, comparando-as com o valor de projeto. Para isso, foi adotada uma metodologia semelhante àquela utilizada na caracterização dos filtros do circuito dos eletrogoniômetros: com um gerador de funções, inserir sinais senoidais de tensão com 1 Volt de pico e frequências variadas na entrada dos filtros e, com um osciloscópio, mensurar a amplitude das senóides de saída Força sobre membros inferiores e superiores Células de carga O suporte de peso corporal utilizado neste projeto foi desenvolvido por Pereira (2009) e é capaz de medir a distribuição da carga corporal durante a aplicação do TLSP. Para isso, o referido SPC faz uso de três células de carga, dispositivos transdutores de força de tração/compressão para sinais de tensão. Nos apoios das mãos da esteira elétrica do SPC, foram acopladas duas células de carga tipo S com capacidade máxima de 100 kg cada (Alfa instrumentos), com o intuito de mensurar a força sustentada pelos membros inferiores do paciente durante a caminhada. Outra célula de carga do mesmo tipo foi acoplada entre o colete e o cabo de aço para medir a parcela de peso corporal do indivíduo sustentada pelo colete ao longo do treino (Figura 12).


34 18 Figura 12 Suporte de peso corporal utilizado neste projeto. Fonte: Pereira, Circuitos de acondicionamento A Figura 13 mostra, em diagrama de blocos, o circuito de acondicionamento dos sinais das células de carga desenvolvido neste projeto final de curso. Figura 13 Diagrama de blocos do circuito eletrônico de acondicionamento das células de carga. Fonte: o autor, 2012.
35 19 Como ilustra a Figura 13, cada uma das três células de carga do SPC é conectada a um circuito eletrônico cujo primeiro estágio, o de alimentação, fornece uma tensão simétrica de ±5 Volts para estes dispositivos. Em seguida, os sinais de saída e das células de carga passam por estágios de amplificação (Figura 14), construídos com o amplificador de instrumentação INA114AP (Burr Brown). Figura 14 Diagrama esquemático do estágio de amplificação utilizado no circuito das células de carga. Fonte: o autor, De acordo com o manual do fabricante (BURR BROWN, 1998, p. 1), o ganho do amplificador de instrumentação é dado por: = 1+ 50, (7) onde representa uma resistência posicionada entre os terminais 1 e 8 do amplificador. Assim, para uma entrada diferencial, a tensão de saída é dada por: =. (8) Neste projeto, o ajuste do ganho foi realizado através de trimpots. Com as resistências dos amplificadores da célula de carga da mão direita, mão esquerda e colete ajustadas em 44Ω, 51Ω e 140Ω respectivamente, foi possível calcular os ganhos teóricos destes amplificadores através de (7), tal como:
36 20 ã = (9) ã = (10) = (11) Em teste de bancada realizado para medir os ganhos reais de operação dos amplificadores, foram aplicados dois níveis conhecidos de tensão nas suas entradas e (1,9mV e 0,9mV respectivamente) e mensurado o nível do sinal de saída. Então, utilizando (8), foram verificados os ganhos de operação. Além de traduzir forças experimentadas em sinais de tensão, as células de carga permitem distinguir se a força referida é de tração ou de compressão. No primeiro caso, a tensão de saída do dispositivo é positiva e, no segundo caso, a saída apresenta tensão negativa. Os estágios de amplificação do circuito, alimentados com tensão simétrica de ±5 Volts, são capazes de amplificar níveis de tensão tanto positivos quanto negativos. No entanto, o módulo de digitalização de sinais utilizado neste projeto opera apenas com níveis de tensão na faixa de zero a 5 Volts. Por tanto, foi utilizada uma estratégia com divisor de tensão (Figura 15) para ajustar os sinais de saída dos amplificadores na faixa de operação do módulo de digitalização. Figura 15 Diagrama esquemático do estágio divisor de tensão utilizado no circuito das células de carga. Fonte: o autor, 2012.
37 21 A tensão de saída dos estágios divisores de tensão é dada por: = +5 2, (12) onde corresponde à tensão de saída do estágio de amplificação. Por fim, foram desenvolvidos filtros para os sinais das três células de carga, idênticos aqueles construídos no circuito dos eletrogoniômetros e sensores de contato do pé com o solo. Os circuitos correspondem a filtros Butterworth de 2ª ordem do tipo passa-baixas (PERTENCE JÚNIOR, 2003) com frequência de corte de 40 Hz, construídos com o amplificador operacional MCP6L04T (Microchip). Utilizando um gerador de funções e um osciloscópio, foram levantadas as curvas de resposta em frequência dos três estágios de filtragem, bem como verificadas as frequências de corte de operação e comparadas ao valor de projeto Calibração das células de carga No procedimento de calibração, com as células de carga conectadas ao circuito, foram pendurados até 20 kg nas células de carga dos apoios das mãos, em passos de 5 kg. Já no dispositivo do colete, foram pendurados até 65 kg, em passos de 10 kg. Nos dois casos, a cada massa acrescentada, o sinal na saída do circuito foi mensurado com o auxílio de um multímetro. Por fim, para cada célula de carga, foi traçada a curva de peso versus tensão, estimada a equação da reta e calculado o coeficiente de determinação, no intuito de investigar linearidade no funcionamento dos dispositivos em conjunto com o circuito eletrônico Confecção e armazenamento do hardware Neste trabalho, foram projetadas duas placas de circuito com componentes SMD: uma placa principal, para acondicionar os sinais dos eletrogoniômetros, dos sensores de contato do pé com o solo e da célula de carga do colete, e outra placa para receber os sinais das células de carga das mãos. Nos dois
38 22 casos, tanto o diagrama esquemático (ANEXOS A e B) quanto o roteamento das trilhas foi realizado com o software Altium designer (Altium LTD). Para a confecção das placas de circuito impresso, foi utilizado o método fotográfico de transferência (OLIVEIRA, 2010). A soldagem dos componentes nas placas foi realizada manualmente com o auxílio de um soprador de ar quente (TOYO), equipamento adequado para fixação de componentes SMD. Após a construção e a caracterização dos circuitos por meio de testes de bancada, foram utilizadas duas caixas de protótipo para armazenar as placas. A caixa de protótipo da placa principal foi planejada para ser portátil, no intuito de acoplá-la na parte traseira do colete de sustentação do paciente ao longo das sessões de TLSP. Com dimensões de 12x8x5 cm, sua interface externa foi adaptada com conectores do tipo DB09 macho (Figura 16-a), permitindo a conexão dos eletrogoniômetros, dos sensores de contato com o solo e da célula de carga do colete, cujas saídas foram adaptadas a conectores do tipo DB09 fêmea. Existe ainda uma interface USB de comunicação com o módulo de digitalização (Figura 16-b). A chave do tipo liga-desliga (Figura 16-b) permite habilitar a alimentação do circuito eletrônico, fornecido por duas baterias de 9 Volts e 300 mah (Ex Power) conectadas em paralelo e armazenadas no interior da caixa, no intuito de manter o nível da alimentação em 9 Volts e somar a corrente elétrica das duas baterias. (a) (b) Figura 16 Caixa de protótipo da placa principal em vista (a) frontal e (b) lateral. Fonte: o autor, 2012.
39 23 A caixa de protótipo da placa das células de carga das mãos (Figura 17), cujas dimensões são de 8x6,5x4 cm, foi projetada para permanecer fixada na esteira elétrica durante o período de treino. Esta caixa foi adaptada com dois conectores DB09: um para a conexão com os referidos dispositivos, e outro para conexão com a placa de circuito principal, a fim de compartilhar a tensão de alimentação das baterias e entregar os sinais acondicionados das células de carga das mãos. Figura 17 Caixa de protótipo da placa das células de carga das mãos. Fonte: o autor, Monitoramento da tensão de alimentação dos circuitos Com o intuito de monitorar constantemente a tensão de alimentação fornecida aos circuitos eletrônicos deste projeto por meio de baterias, a placa principal possui uma estratégia de circuito divisor de tensão, mostrada na Figura 18. Figura 18 Diagrama esquemático do circuito divisor de tensão utilizado para monitorar a tensão das baterias. Fonte: o autor, A tensão de saída pode ser escrita como:
40 24 = + (13) No projeto, utilizou-se = =910 Ω, conforme ilustra a Figura 18. Portanto: = 2 = 2 (14) (15) Esta estratégia foi adotada uma vez que os canais analógicos do módulo de digitalização utilizado neste projeto trabalha apenas com níveis de tensão situados entre zero e 5 Volts. Dessa forma, como a tensão máxima de alimentação é 9 Volts (baterias totalmente carregadas), o nível de tensão máximo possível equivale a 4.5 Volts. O valor das resistências e foi escolhido de modo que o circuito divisor de tensão não apresentasse consumo elevado de corrente elétrica. A Figura 19 mostra uma simplificação deste circuito. Figura 19 Associação em série dos resistores do circuito divisor de tensão. Fonte: o autor, Assim, a corrente elétrica consumida pelo divisor de tensão pode ser calculada como: = (16)
41 25 Supondo que as baterias estão completamente carregadas, ou seja, =9, tem-se: = 9 1,82 5 (17) Módulo de digitalização de dados Os sinais de ângulos articulares, contato dos pés direito e esquerdo com o solo, força sobre membros inferiores e peso do paciente sustentado pelo SPC totalizam 13 sinais biomecânicos investigados neste projeto. Para digitalizar os sinais acondicionados pelos circuitos, foi utilizado um Arduino Mega 2560 (Figura 20), que possui 16 canais analógicos de entrada e resolução de 10 bits na digitalização. Figura 20 Arduino Mega 2560 utilizado na digitalização dos sinais mensurados pelos sensores deste projeto final de curso. Fonte: Smith, O Assim, o Arduino foi armazenado em uma das caixas de protótipo, juntamente à placa de circuito principal e às baterias. As 14 saídas do circuito, que correspondem aos 13 sinais biomecânicos acondicionados mais o sinal de monitoramento da tensão das baterias, foram conectadas às entradas analógicas do Arduino através de cabos flat. A tensão de alimentação do Arduino é fornecida pelo circuito, que regula a tensão das baterias para 7 Volts através de um LM1117 ajustável (Texas Instruments).
42 Comunicação sem fio entre o hardware e o computador Para realizar a comunicação sem fio entre o hardware e um computador, foi utilizado um módulo Bluetooth JY-MCU, armazenado em conjunto com o Arduino na caixa de protótipo. Este módulo foi alimentado através dos pinos de 5 Volts e GND do Arduino, e a comunicação entre estes dispositivos foi realizada através dos pinos de transmissão (Tx) e recepção (Rx) dos mesmos. No computador, foi conectado um adaptador Bluetooth-USB para se comunicar com o módulo JY-MCU. A Figura 21 ilustra a comunicação entre os elementos deste projeto final de curso. Figura 21 Esquema em blocos da comunicação entre os sensores, circuitos de acondicionamento, Arduino, módulo Bluetooth e um computador. Fonte: o autor, Através de uma interface de programação apropriada (ARDUINO, 2012), foi desenvolvido um firmware (ANEXO C) e programado no Arduino utilizando comunicação USB (via cabo físico). A Figura 22 ilustra as tarefas realizadas pelo Arduino após a gravação deste firmware.
 onde representa o tempo de amostragem.")
43 27 Figura 22 Fluxograma de tarefas executadas pelo Arduino após a gravação do firmware. Fonte: o autor, É possível determinar a frequência com a qual o Arduino realiza a amostragem de cada canal analógico, tal como: = 1, (18) onde representa o tempo de amostragem. Na Figura 20, observa-se que o Arduino aguarda 0.2 segundos entre a amostragem de cada canal. Portanto: = 1 0,2 (19) =5 (20) Assim, é possível calcular a taxa de bits enviados pelo Arduino:
44 28 = (21) =800 (22) Os 20 bits acrescentados em (21) correspondem aos valores inteiros de início e fim de comunicação. Através do resultado obtido em (22), observa-se que a taxa de comunicação de 9600 bits por segundo configurada no firmware do Arduino é suficiente para que nenhuma amostra dos dados seja descartada. A taxa de transmissão dos módulos Bluetooth também foi configurada como 9600 bps, para que nenhuma amostra seja perdida durante a comunicação com o computador Monitoramento dos dados no computador Para este projeto, foi desenvolvida uma interface gráfica em ambiente MATLAB de monitoramento dos dados biomecânicos do paciente durante a sessão de TLSP (Figura 23). Figura 23 - Interface gráfica desenvolvida para o monitoramento dos dados biomecânicos. Fonte: o autor, 2012.

45 29 A Figura 24 mostra, em forma de fluxograma, as tarefas realizadas pela interface gráfica durante o monitoramento dos dados. Figura 24 Representação das tarefas realizadas pela interface gráfica em forma de fluxograma. Fonte: o autor, 2012.
46 30 Após verificar a integridade dos bytes de início e fim de comunicação, a interface transforma as amostras de tensão referentes aos eletrogoniômetros e às células de carga em valores de ângulo articular e peso, respectivamente. Para isso, são utilizadas as equações das curvas de calibração destes dispositivos. O nível de tensão de controle da bateria, que foi dividido ao meio pelo circuito divisor de tensão (sessão 3.5 deste relatório), é multiplicado por dois no software a fim de se obter a tensão real de alimentação dos circuitos. Na interface, os membros inferiores do boneco são flexionados ou estendidos conforme os ângulos articulares mensurados pelos eletrogoniômetros (Figura 25). Figura 25 - Representação gráfica dos ângulos articulares pela interface virtual. Neste caso, o valor dos ângulos esquerdo e direito corresponde a, respectivamente, 0 e 70 graus. Fonte: o autor, 2012.
47 31 Para ilustrar a força nos apoios das mãos, foi utilizado um componente gráfico em formato de mola, tal que a expansão da mola é proporcional à intensidade da força (em uma escala de zero até 20 kgf). Para forças de compressão, a mola é expandida para baixo (Figura 26), enquanto que para forças de tração, a expansão é para cima. Figura 26 - Representação gráfica da força de compressão em membros superiores pela interface virtual. Neste caso, o valor da força nas mãos direita e esquerda corresponde a, respectivamente, 20 e 10 kgf. Fonte: o autor, Neste estudo, uma vez que os sensores de contato do pé com o solo são utilizados apenas como chaves de contato, estes aparelhos não foram submetidos a uma calibração. No entanto, são conhecidos os níveis de tensão de saída dos circuitos de contato com o solo nos casos extremos: - sem nenhuma força (0 kgf), 4,89 ;
48 32 - no limite de força máxima (11,36 kgf), 0,57. Dessa forma, estes níveis foram utilizados pela interface gráfica para exibir a força em cada um dos quatro pontos de cada pé investigados neste projeto. Nesse contexto, foi utilizado também o componente gráfico em formato de mola tal que, na ausência de força, a mola se apresenta em repouso; na presença de força máxima, a mola se expande para cima até um ponto extremo; para forças intermediárias, a mola apresenta expansão menor do que no caso anterior, conforme uma escala visual de cores (Figura 27). Figura 27 - Representação gráfica do contato dos pés com o solo pela interface virtual. Neste caso, os pontos dos calcanhares apresentam força máxima de contato com o solo, enquanto que os pontos do ante-pé direito e esquerdo apresentam força intermediária. Nas regiões dos dedões, não existe nenhuma força de contato. Fonte: o autor, 2012.
49 33 O fluxograma da Figura 24 mostra que a atualização das figuras da interface gráfica, que compreendem os ângulos articulares, contato dos pés com o solo e força nas mãos, acontece a cada dois pacotes de dados recebidos, enquanto que a atualização das caixas de texto, com os valores do peso sustentado pelo colete e da tensão da bateria, é realizada após o recebimento de 20 novos pacotes de dados. O tempo decorrido de monitoramento é atualizado constantemente, a cada pacote de dado recebido. Em qualquer momento ao longo do monitoramento dos dados, o usuário pode pressionar o botão Stop (Figura 23). Nesse caso, a comunicação serial entre os módulos Bluetooth é encerrada, impedindo o recebimento de novos pacotes de dados pelo computador Sistema completo: testes de bancada e validação Após o desenvolvimento do sistema de monitoramento biomecânico deste projeto final de curso, o mesmo foi submetido a um teste de bancada para levantar seu consumo total de corrente elétrica. Neste teste, os eletrogoniômetros, os sensores de contato do pé com o solo e as células de carga foram conectados aos seus respectivos circuitos, que receberam alimentação através de uma fonte de tensão de bancada. Em seguida, a interface gráfica foi acionada para realizar o monitoramento dos dados. Assim, verificou-se no display da fonte de alimentação o valor da corrente elétrica consumida pelo sistema durante uma coleta de dados. A etapa de validação do sistema foi realizada por meio de testes com um indivíduo hígido, aprovado pelo Comitê de Ética em Pesquisa da PUCPR (parecer nº 6147). Ao expressar sua concordância em participar deste estudo assinando o termo de consentimento livre e esclarecido (ANEXO D), a voluntária passou por uma avaliação que constatou sua conformidade com os critérios de inclusão pré-estabelecidos para o teste: pessoa sem doença ativa em tratamento; faixa etária entre 18 e 50 anos; massa corporal inferior a 100 kg (aferida com uma balança digital da marca Plenna, modelo Sport); ausência de discrepância ou encurtamento dos membros inferiores e ausência de deformidades nos pés. Então, a voluntária compareceu no laboratório de engenharia de reabilitação (LER) da PUCPR para realizar uma única sessão de TLSP sobre
50 34 uma esteira ergométrica utilizando os sensores desenvolvidos neste projeto. Durante o exercício, ela utilizou calçados apropriados para caminhada/corrida. O posicionamento dos eletrogoniômetros nos membros inferiores da participante foi realizado conforme aquele proposto por Pereira et al. (2009), onde o eixo de cada um dos aparelhos foi ajustado sobre o côndilo lateral do fêmur e a haste fixa foi alinhada com o maléolo lateral. Em seguida, a haste móvel foi alinhada 180º em relação à haste fixa e ajustada na posição desejada com auxílio das tiras de velcro. As palmilhas com sensores de pressão foram introduzidas nos calçados da voluntária, embaixo de suas palmilhas originais, evitando o contato direto entre estes aparelhos e os pés do sujeito da pesquisa. Então, a participante caminhou naturalmente sobre a esteira elétrica em velocidade lenta (1.5 km/h) para se familiarizar com os sensores ajustados em seus membros inferiores. Durante esta caminhada, os sinais biomecânicos foram monitorados através da interface gráfica, que permitiu visualizar em tempo real o comportamento dos ângulos articulares, fases da marcha e força sobre membros inferiores ao longo do exercício. Em seguida, conforme proposto por Pereira (2009), foi realizado o ajuste de um colete na voluntária de tal maneira que este não deslizasse e que não produzisse uma compressão excessiva do tórax/abdome. Então, o colete foi fixado ao SPC e com o auxílio dos cabos de aço e roldanas existentes no mesmo, a participante foi totalmente suspensa da esteira. Na interface gráfica, foi possível visualizar o peso corporal total da voluntária Por fim, a participante caminhou em ritmo lento (1.5 km/h) e intermediário (2.5 km/h) sustentando 70% do seu peso corporal sobre os membros inferiores. Novamente, a interface gráfica foi utilizada para monitorar os sinais biomecânicos na execução da atividade física.
51 Análise de riscos A verificação dos riscos existentes neste projeto final de curso foi realizada através da análise FMEA e relacionada na Tabela 1. Tabela 1 Análise FMEA deste projeto final de curso Item ou função Modo Efeito em S Causa em O Dispositivo de D RPN Ações potencial de potencial potencial controle recomendadas falha Sensores de ângulos articulares Quebrar Pressionar a perna Perda da função 8 Desgaste 3 Software de monitoramento de sinais 1 24 Substituir o sensor Desconforto 3 Pressão do 3 Paciente 1 9 Reajustar a elástico presilha Sensores de contato do pé com o solo Soltar Perda da função 8 Desgaste 3 Software de monitoramento de sinais 1 24 Pressionar o Espessura pé Desconforto 3 dos fios 3 Paciente 1 9 Re-fixar os sensores de pressão na palmilha Reposicionar o sensor dentro do tênis Sensores de força Software de Contatar o (mãos e colete) Quebrar Perda da 8 Desgaste 2 monitoramento 1 16 fabricante função de sinais Software de Contatar o Perda da 8 Sobrecarga 3 monitoramento 1 24 fabricante função de sinais Software de Contatar o Módulo hardware Sem saída 8 Sobrecarga 3 monitoramento 1 24 fabricante de Queimar de sinais acondicionamento Software de Contatar o de sinais Ruído 8 Sobrecarga 3 monitoramento 1 24 fabricante de sinais Paciente e Contatar o Mau cheiro 3 Sobrecarga 3 terapeuta 1 9 fabricante
52 36 Software de Contatar o Perda da 8 Sobrecarga 3 monitoramento 1 24 fabricante Módulo de Queimar função de sinais digitalização Paciente e Contatar o Mau cheiro 3 Sobrecarga 3 terapeuta 1 9 fabricante Software de Utilizar o monitoramento de Desconfigurar Perda da 8-2 Terapeuta 1 16 software back- sinais função up Fonte: o autor, 2012.
53 37 4. RECURSOS E CRONOGRAMA Nesta sessão, será descrita a origem dos recursos utilizados no desenvolvimento deste projeto final de curso. Será discutida também a execução das etapas deste estudo em relação ao cronograma pré-estabelecido para o projeto Recursos As Tabelas 2 e 3 relacionam os itens e/ou equipamentos utilizadas para a confecção dos módulos físico e virtual, respectivamente, do sistema proposto neste estudo. A coluna denominada Fonte do recurso indica se determinado item foi custeado pelo próprio autor do projeto (A), pela empresa HIT Tecnologia em Saúde LTDA (B), se pertence ao Laboratório de Engenharia de Reabilitação (LER) da PUCPR (C) ou se é proveniente de algum projeto de pesquisa coordenado pela orientadora deste projeto final de curso (D). Tabela 2 - Relação das fontes de custeio de cada item utilizado na parte física do projeto. Equipamento Item utilizado no desenvolvimento Fonte do recurso A B C D Potenciômetros de precisão X Hastes de fenolite X Papel tipo contact X Solda plástica X Sensores de ângulo Material emborrachado X Tiras de elástico e de velcro X Cabos e conectores X Sensores de pressão X Sensores de contato do pé Material Emborrachado X com o solo Cabos e conectores X Esteira elétrica X Suporte de peso corporal Cabos de aço e roldanas X Células de carga X Cabos e conectores X Placas de cobre X Emulsão e sensibilizante (utilizados no X Circuitos de acondicionamento processo fotográfico) Lâmpada alógena (utilizada no processo X
54 38 fotográfico) Componentes eletrônicos SMD X X Estanho em pasta X Soprador industrial de ar quente X Caixas plásticas X Caixas de protótipo Conectores e cabos X Papel tipo contact X Módulo de digitalização de Arduino Mega 2560 X dados Bluetooth de comunicação com o Arduino X Módulo de comunicação dos Adaptador Bluetooth-USB de X dados comunicação com o computador Recepção dos dados Notebook X Fonte: o autor, 2012 Tabela 3 Relação das fontes de custeio dos itens utilizado na parte virtual do projeto. Item utilizado no desenvolvimento Fonte do recurso A B C D Interface virtual de Notebook X monitoramento dos dados Ambiente de programação MATLAB X Fonte: o autor, Cronograma do projeto Na fase de planejamento das atividades do projeto, foram traçadas quatro tarefas principais, senso elas: (1) Testes de digitalização e transmissão sem fio de dados, que envolve: - Familiarização com o Arduino e sua interface de programação; - Familiarização com o Bluetooth; - Integração entre o Arduino e o Bluetooth; - Comunicação entre módulos Bluetooth e recebimento de dados via MATLAB. (2) Projeto e desenvolvimento dos módulos físicos do sistema, que envolve: - Construção de eletrogoniômetros;
55 39 - Aprimoramento de sensores de contato do pé com o solo desenvolvidos pelo autor deste trabalho durante um projeto PIBIC; - Desenvolvimento de placas de circuito impresso pelo método fotográfico; - Montagem eletrônica das placas utilizando componentes SMD; - Adaptação de caixas de protótipo para armazenaram o hardware e permitir a conexão externa dos sensores. (3) Desenvolvimento de interface gráfica em ambiente MATLAB para monitoramento dos dados, que envolve: - Familiarização com a ferramenta GUI (Graphical User Interface) do MATLAB; - Desenvolvimento de uma interface de monitoramento biomecânico adequada para usuários da área da saúde; - Testes de taxa de comunicação do sistema com o computador e frequência de amostragem dos dados. (4) Avaliação do sistema final e confecção do relatório, que envolve: - Caracterização elétrica dos módulos físicos do projeto; - Avaliação da robustez e praticidade do sistema completo através de testes com um indivíduo saudável (após a aprovação do Comitê de Ética em Pesquisa da PUCPR); - Documentação do projeto. A Tabela 4 mostra como as tarefas descritas acima foram inicialmente previstas no cronograma deste projeto final de curso. Tabela 4 Cronograma das atividades previstas para o desenvolvimento do projeto. Cronograma de atividades Etapas Maio Junho Julho Agosto Setembro Outubro Novembro (1) (2) (3) (4) Fonte: o autor, 2012
56 40 A tabela 5 mostra os períodos em que cada etapa do projeto foi, de fato, realizada. Tabela 5 Períodos reais de execução das atividades do projeto. Realização das etapas do projeto Etapas Maio Junho Julho Agosto Setembro Outubro Novembro (1) (2) (3) (4) Fonte: o autor, 2012 Observando as Tabelas 4 e 5, verifica-se que a etapa (1) foi realizada conforme previsto no cronograma. No entanto, a etapa (2) se estendeu por mais um mês, devido às dificuldades encontradas na confecção das placas de circuito pelo processo fotográfico, bem como no tempo de espera para a chegada dos componentes SMD (comprados fora do país). Como conseqüência, a etapa (3) precisou ser deslocada em relação ao cronograma original, e se estendeu até o mês de novembro. Por fim, a etapa (4) foi realizada conforme previsto no cronograma.
57 41 5. RESULTADOS 5.1. Sensores de ângulos articulares e circuito de acondicionamento Após conectar os sensores de ângulo ao circuito de acondicionamento, foi verificado o nível de tensão dos sinais na entrada e na saída dos estágios de amplificação, com os sensores na posição de membro inferior estendido e flexionado (Tabela 6). Tabela 6 Níveis de tensão mensurados na entrada e na saída dos estágios de amplificação do circuito dos eletrogoniômetros. Sensor de ângulo direito Entrada do amplificador (V) Membro estendido 0,96 0,98 Membro flexionado 1,10 3,87 Sensor de ângulo esquerdo Membro estendido 1,12 4,17 Membro flexionado 0,97 1,11 Saída do amplificador (V) Fonte: o autor, 2012 A Figura 28 mostra a resposta em frequência dos filtros dos sensores de ângulos articulares, a partir das quais foram obtidas as frequências de corte de operação dos filtros e comparadas aos valores de projeto (Tabela 7). Figura 28 Resposta em frequência dos estágios de filtragem do circuito dos eletrogoniômetros. Fonte: o autor, 2012.
58 42 Tabela 7 - Relação entre os valores da frequência de corte real e de projeto dos filtros dos circuitos dos eletrogoniômetros. Circuito Frequência de corte de operação (Hz) Frequência de corte de projeto (Hz) Erro (%) Sensor de ângulo direito Sensor de ângulo esquerdo 36,5 40-8,75 Fonte: o autor, 2012 Com o procedimento de calibração, foram traçadas as curvas de ângulo articular versus tensão para os eletrogoniômetros da perna direita e esquerda (Figuras 29 e 30) e estimadas as equações da reta, encontrando coeficientes de determinação iguais a 0,999 nos dois casos. ângulo (graus) Sensor do joelho direito tensão (V) y = 34,704x -33,961 R² = 0,9998 Figura 29 Curva de calibração do eletrogoniômetro da perna direita. Fonte: o autor, ângulo (graus) Sensor do joelho esquerdo tensão (V) y = -33,351x + 137,96 R² = 0,9993 Figura 30 Curva de calibração do eletrogoniômetro da perna esquerda. Fonte: o autor, 2012.
59 Sensores de contato do pé com o solo e circuito de acondicionamento As Figuras 31 e 32 mostram a resposta em frequência dos filtros dos sensores de contato dos pés direito e esquerdo com o solo, respectivamente, a partir das quais foram obtidas as frequências de corte de operação estes estágios e comparadas aos valores de projeto (Tabela 8). Figura 31 Resposta em frequência dos filtros do sensor de contato do pé direito com o solo. Fonte: o autor, Figura 32 Resposta em frequência dos filtros do sensor de contato do pé esquerdo com o solo. Fonte: o autor, 2012.
60 44 Tabela 8 - Relação entre os valores da frequência de corte real e de projeto dos filtros dos circuitos dos eletrogoniômetros. Circuito Frequência de corte de operação (Hz) Frequência de corte de projeto (Hz) Erro (%) Ante-pé direito 34, ,75 Retro-pé direito (A) 34, ,75 Retro-pé direito Região do dedão direito 36,5 40-8,5 Ante-pé esquerdo 35, ,25 Retro-pé esquerdo 35, ,25 Retro-pé esquerdo 36,5 40-8,75 Região do dedão esquerdo 36,5 40-8,75 Fonte: o autor, Células de carga e circuito de acondicionamento Após verificar a saída dos três amplificadores de instrumentação para entradas de tensão conhecidas, os ganhos de operação foram estimados e comparados aos ganhos de projeto (Tabela 9). Tabela 9 - Relação entre os ganhos de operação e de projeto dos amplificadores de instrumentação. Circuito amplificador Ganho real Ganho projetado Erro (%) Célula de carga da mão direita Célula de carga da mão esquerda Célula de carga do colete , , ,12 Fonte: o autor, 2012 A Figura 33 mostra as curvas de resposta em frequência dos filtros das células de carga, a partir das quais foram estimadas as frequências de corte de operação destes circuitos e comparadas ao valor de projeto (Tabela 10). Após o procedimento de calibração, foram traçadas as curvas de peso versus tensão para cada uma das três células de carga (Figuras 34, 35 e 36). A linearização apresentou coeficientes de determinação iguais a 0.987, e 1.0 para as células da mão direita, mão esquerda e do colete, respectivamente.
61 45 Figura 33 Resposta em frequência dos filtros do circuito das células de carga. Fonte: o autor, Tabela 10 Relação entre os valores da frequência de corte real e de projeto dos filtros dos circuitos das células de carga. Circuito amplificador Frequência de corte de operação (Hz) Frequência de corte de projeto (Hz) Erro (%) Célula de carga da mão direita 36,5 40-8,75 Célula de carga da mão esquerda Célula de carga do colete 36,5 40-8,75 Fonte: o autor, 2012 Peso (kg) Célula da mão direita 0 0,5 1 1,5 2 2,5 Tensão (V) y = -10,35x + 23,197 R² = 0,987 Figura 34 Curva de calibração da célula de carga da mão direita. Fonte: o autor, 2012.
62 46 Célula da mão esquerda Peso (kg) y = -12,676x + 26,969 R² = 0, ,5 1 1,5 2 2,5 Tensão (V) Figura 35 Curva de calibração da célula de carga da mão esquerda. Fonte: o autor, Célula de carga do colete Peso (kg) Tensão (V) y = 32,556x -84,398 R² = 1 Figura 36 Curva de calibração da célula de carga do colete Fonte: o autor, 2012.
63 Funcionamento do sistema aspectos gerais Após conectar todos os módulos do projeto e prover alimentação a partir de uma fonte de bancada, foi verificado que a corrente elétrica consumida pelo sistema oscila entre 270 e 295 ma, com eventuais picos em 300 ma. Durante os testes com a voluntária de pesquisa, nenhum sensor apresentou problemas de posicionamento ou de funcionamento. Verificou-se também que os elementos gráficos da interface virtual respondiam de acordo com a execução do exercício pela participante.
64 48 6. DISCUSSÃO Em outros trabalhos, o autor deste projeto já desenvolveu eletrogoniômetros para mensuração de ângulos articulares (MARREGA et al., 2012; YAEDU, 2011; YAEDU et al., 2010). No entanto, naqueles estudos, as hastes fixas dos sensores eram posicionadas na base de potenciômetros, enquanto as hastes móveis eram fixadas no eixo variável dos mesmos. O posicionamento daqueles aparelhos sobre membros inferiores provocava uma força constante (e indesejada) sobre os potenciômetros, devido à distância de separação das hastes, causando inclusive danos naqueles componentes durante testes práticos. Este problema foi eliminado nos sensores de ângulo construídos para este projeto (Figura 3) devido à nova estratégia de posicionamento das hastes fixa e móvel nos potenciômetros, conforme ilustra a Figura 2. Em testes com uma voluntária de pesquisa, foi observada maior praticidade no posicionamento e melhor ajuste dos sensores nos membros inferiores da mesma com as tiras de elástico e velcro, em comparação ao uso de joelheiras e velcro (MARREGA et al., 2012; YAEDU et al., 2010). As palmilhas sensoriais aprimoradas para este projeto (Figura 9) possuem um ponto a mais de detecção de contato do pé com o solo em relação às anteriores (MARREGA et al., 2012), situado na região do dedão. Em testes práticos com uma participante verificou-se que, conforme descrito na literatura (HESSERT et al., 2005; MEYRING et al., 1997), esta região do pé apresenta níveis significativos de pressão ao longo de uma caminhada. Dessa forma, esta melhoria nos sensores contribui no processo de detecção das fases da marcha do paciente durante a sessão de treino locomotor. Neste estudo, os eletrogoniômetros e as células de carga foram, em conjunto com seus circuitos de acondicionamento, submetidos ao procedimento de calibração proposto por Pereira (2009), que permitiu levantar a relação entre a tensão de saída dos circuitos e a grandeza física mensurada pelos dispositivos (ângulo articular e massa, respectivamente). Através das curvas de calibração dos sensores de ângulo (Figuras 29 e 30) e das células de carga (Figuras 34, 35 e 36), foi possível constatar a linearidade destes aparelhos antes de utilizá-los na voluntária da pesquisa.
65 49 As palmilhas sensoriais (Figura 9), no entanto, não foram submetidas a nenhum procedimento de calibração, pois o objetivo destes aparelhos no estudo consiste apenas em detectar o contato dos pés do paciente com o solo. É possível que, em estudos futuros, os sensores de contato e o circuito de acondicionamento sejam calibrados a fim de se mapear os níveis da pressão plantar ao longo dos pés durante o TLSP. Os circuitos eletrônicos desenvolvidos apresentaram características elétricas de operação próximas aos valores de projeto. Em relação aos circuitos das células de carga, foi calculado um erro máximo de 1,12% do ganho de operação para o ganho de projeto no estágio de amplificação do sinal do dispositivo do colete (Tabela 9). As curvas de resposta em frequência dos filtros passa-baixas mostram um comportamento bastante similar dos mesmos entre si. Estes estágios apresentaram frequências de corte de operação próximas ao valor previsto nos cálculos (40 Hz), com erro máximo de 15% observado no circuito da célula de carga da mão esquerda (Tabela 10). A partir das falhas observadas no sistema anterior de aquisição de dados biomecânicos em relação à robustez (MARREGA et al., 2012), duas medidas foram adotadas neste novo sistema: alimentação elétrica proveniente de baterias (para eliminar a conexão com a rede elétrica) e redução da quantidade de fios e cabos, por meio da transmissão de dados wireless. Tanto em testes de bancada como na avaliação geral do sistema com a voluntária de pesquisa, foram observados os efeitos positivos destas medidas em relação à qualidade dos sinais mensurados. Além disso, o novo sistema proporcionou um ambiente de reabilitação menos poluído, sem a necessidade de cabos longos para conexões com a rede elétrica e com o computador, como acontecia anteriormente (MARREGA et al., 2012). Durante a especificação deste projeto final de curso, havia sido planejada uma interface gráfica de monitoramento e de aquisição dos dados a 100 Hz, capaz de mostrar na tela as variáveis biomecânicas em forma de gráfico bidimensional e salvar os dados coletado em planilha Excel. No entanto, com o objetivo de tornar a interface mais intuitiva e melhorar sua usabilidade com profissionais da área da saúde, optou-se por utilizar elementos visuais dinâmicos, que fornecem uma perspectiva geral do desempenho biomecânico do paciente durante a sessão de treino (Figura 23).
66 50 Testes práticos mostraram que a atualização da interface gráfica leva cerca de um segundo, período muito maior que o tempo de 1ms inicialmente proposto para a amostragem dos sinais. Isso impediu a aquisição dos dados à taxa de 100 Hz, pois durante a atualização da interface, as novas amostras eram armazenadas em um buffer de comunicação serial do MATLAB, gerando um atraso temporal progressivo entre o estado do paciente no exercício e as variáveis exibidas na interface. Portanto, a interface gráfica realiza apenas o monitoramento em tempo real das variáveis biomecânicas investigadas por este estudo ao longo do TLSP.
67 51 7. CONCLUSÃO Os sensores desenvolvidos para este projeto possuem características de praticidade de uso para com profissionais da área da saúde, tanto em relação a sua utilização em pessoas como no procedimento de higienização dos mesmos. O sistema físico, de maneira geral, apresenta aspecto amigável, pois as caixas de circuito possuem entradas específicas e identificadas para a conexão de cada sensor, além de um botão do tipo ligadesliga. A substituição de cabos por um esquema de transmissão wireless dos dados para o computador, além de facilitar a utilização do equipamento para o terapeuta, contribui para a robustez do sistema ao ruído. Por fim, a interface gráfica possui esquemas interativos que permitem o acompanhamento biomecânico do paciente de forma global e intuitiva pelo profissional da saúde. Dessa forma, o sistema desenvolvido para este projeto final de curso foi capaz de, em conjunto com o suporte de peso corporal existente no LER, monitorar em tempo real sinais biomecânicos de uma voluntária de pesquisa.
68 52 REFERÊNCIAS ARDUINO. Download the Arduino Software. Disponível em: < Último acesso em 14 nov BOBATH, K. A deficiência motora em pacientes com paralisia cerebral. Petrópolis: Vozes, CHEN, G., PATTEN, C.; KATHRI, D.H.; ZAJAC, F.E. Gait deviations associated with post-stroke hemiparesis: improvement during treadmill walking using weight support, speed, support stiffness, and handrail hold. Gait & Posture. v. 22, n. 1, p , DIETZ, V.; HARKEMA, S.J. Locomotor activity in spinal cord-injured persons. Journal Applied Physiology. v. 96: p , DIETZ, V.; WIRZ, M.; COLOMBO, G.; CURT, A. Locomotor capacity and recovery of spinal cord function in paraplegic patients: a clinical and electrophysiological evaluation. Electroencephalography and Clinical Neurophysiology. v. 109, p , DUTRA, C.M.R. Respostas fisiológicas ao treino locomotor com suporte parcial de peso na lesão medular. Dissertação (Mestrado em Tecnologia em Saúde) Pontifícia Universidade Católica do Paraná, Curitiba, DOBKIN, B.; BARBEAU, H.; DEFORGE, D.; DITUNNO, J.; ELASHOFF, R.; APPLE, D.; BASSO, M.; BEHRMAN, A.; FUGATE, L.; HARKEMA, S.; SAULINO, M.; SCOTT, M. Traumatic spinal cord injury: the multicenter randomized spinal cord injury locomotor trial the evolution of walking-related outcomes over the first 12 weeks of rehabilitation for incomplete. Neurorehabilitation and Neural Repair. v. 21, p , EICHER, P. S.; BATSHAW, M. L. A criança com deficiência do desenvolvimento. Rio de Janeiro, Inter-livros, ENOKA, R. M. Bases Neuromecânicas da Cinesiologia, 2ª edição. Editora Manole, São Paulo, FERRIS, D.P.; SAWICKI, G.S.; DOMINGO, A. Powered lower limb orthoses for gait rehabilitation. Top Spinal Cord Inj Rehabil. v. 11, n. 2, p , 2005.
69 53 HARKEMA, S. J.; HURLEY, S. L.; PATEL, U. K.; REQUEJO, P. S.; DOBKIN, B. H.; EDGERTON, V. R. Human lumbosacral spinal cord interprets loading during stepping. Journal of Neurophysiology. v. 77, p , HESSE S., Treadmill training with partial body weight support after stroke: a review. NeuroRehabilitation. v. 23, n. 1, p , HESSE S, WERNER C, BARDELEBEN A, BARBEAU H. Body weightsupported treadmill training after stroke. Curr. Atheroscler. Rep. v. 3, n. 4, p , HESSERT, M. J.; VYAS, M.; LEACH, J.; HU, K.; LIPSITZ, L. A; NOVAK, V. Foot pressure distribution during walking in young and old adults. BMC Geriatrics, p. 5:8, HIDLER J., NICHOLS D., PELLICCIO M., BRADY K., CAMPBELL D.D., KAHN J.H., HORNBY T.G. Multicenter randomized clinical trial evaluating the effectivences of the lokomat in subacute stroke. Neurorehabilitation and Neural Repair. v. 23, n.1, p. 5-13, Jan KONRAD, Peter. The ABC of EMG.A Practical Introduction to Kinesiological Electromyography. Disponível em: <reseau.risc.cnrs.fr/fichiers/apercu.php?numero=1>. Ultimo acesso em 20 de abril de LEVI, E.M. INSTRUMENTO PORTÁTIL PARA ESTUDOS BIOMECÂNICOS EM ARTICULAÇÕES BASEADO NA AQUISIÇÃO SIMULTÂNEA DE SINAL ELETROMIOGRÁFICO E DE VELOCIDADE ANGULAR. Dissertação (Mestrado em Tecnologia em Saúde) Pontifícia Universidade Católica do Paraná, Curitiba, LISPECTOR, C. A Paixão Segundo G. H. 3 ed. Rio de Janeiro: Sabiá, p. LÜNENBURGER, L.; BOLLIGER, M.; CZELL, D.; MÜLLER, R.; DIETZ, V. Modulation of locomotor activity in complete spinal cord injury. Experimental Brain Research. v. 174, p , MARREGA, L. H. G., MANFFRA, E. F. SISTEMA PARA AVALIAÇÃO BIOMECÂNICA E ELETROMIOGRÁFICA DA REABILITAÇÃO DA MARCHA NA LESÃO MEDULAR In: XXIII Congresso de Engenharia Biomédica (CBEB),
70 , Porto de Galinhas. Anais do XXIII Congresso Brasileiro de Engenharia Biomédica, p MATTERN-BAXTER K. Effects of partial body weight supported treadmill training on children with cerebral palsy. Pediatr Phys Ther. v. 21, n. 1, p , MCCAIN K.J., POLLO F.E., BAUM B.S., COLEMAN S.C., BAKER S., SMITH P.S. Locomotor treadmill training with partial body-weight support before overground gait in adults with acute stroke: a pilot study. Archives of Physical Medical Rehabilitation. V. 89, n. 4, p , Meyring S, Diehl RR, Milani TL,Hennig EM, Bet-lit P. Dynamic plantar pressure distribution measurements in hemiparetic patients. ClinBiomech.1997;12(1):65. MUTLU A., KROSSCHELL K., SPIRA D.G., Treadmill training with partial bodyweight support in children with cerebral palsy: a systematic review. Developmental Medicine & Child Neurolology. v. 51, n. 4, p , NORAXON EMG & Sensor Systems. Mechanical Goniometer Sensor Disponível em < >. Último acesso em 21 de abril de Oliveira, M.A. Placa de circuito impresso pelo processo fotográfico Disponível em: < Último acesso em 13 nov PATIÑO, M. S.; GONÇALVES, A. R.; MONTEIRO; B. C.; SANTOS, I. L.; BARELA, A. M.F.; BARELA, J.A. Kinematic, kinetic and electromyographic characteristics of young adults walking with and without partial body weight support. Revista Brasileira de Fisioterapia. v. 11, n. 1, p , PILLAR, T.; DICKSTEIN, R.; SMOLINSKI, Z. Walking reeducation with partial relief of body weight in rehabilitation of patients with locomotor disabilities. Journal of Rehabilitation Research and Development. v. 28 n. 4, p , PEREIRA, Ericson. SISTEMA PARA APLICAÇÃO E AVALIAÇÃO DO TREINAMENTO LOCOMOTOR COM SUPORTE PARCIAL DE PESO NA LESÃO MEDULAR. 169 f. Dissertação (Mestrado em Tecnologia em Saúde) Pontifícia Universidade Católica do Paraná, Curitiba, 2009.
71 55 PERTENCE JÚNIOR, Antonio. Amplificadores operacionais e filtros ativos: teoria, projetos, aplicações e laboratório. 5. ed.são Paulo: McGraw-Hill, PROVOST B, DIERUF K, BURTNER PA, PHILLIPS JP, BERNITSKY- BEDDINGFIELD A, SULLIVAN KJ, BOWEN CA, TOSER L. Endurance and gait in children with cerebral palsy after intensive body weight-supported treadmill training. Pediatric Physical Therapy, v.19, n. 1, p. 2-10, ROESLER, H.; CANAVEZZI, A.; BONAMIGO, E.C.B.; HAUPENTHAL, A. Desenvolvimento e teste de suporte de peso corporal instrumentalizado para o treino de marcha em esteira. Revista Brasileira de Fisioterapia. v. 9, n. 3, p , SIBLEY, K.M.; TANG, A.; PATTERSON, K.; BROOKS, D.; MCILROY, W. Changes in spatiotemporal gait variables over time during a test of functional capacity after stroke. Journal of NeuroEngineering and Rehabilitation. v. 6, n. 1, p , Smith, O. EXPERIMENTATION AND GEEKINESS Disponível em: < Último acesso em 13 nov SULLIVAN, K. J.; BROWN, D.A.; KLASSEN, T.; MULROY, S.; GE, T.; AZEN, S.P.; WINSTEIN, C.J. Effects of task-specific locomotor and strength training in adults who were ambulatory after stroke: results of the steps randomized clinical trial. Physical Therapy. v. 87, n. 12, p , TEIXEIRA, A.; OLIVEIRA, F. Relatório sobre a prevalência de deficiências, incapacidades e desvantagens: sistematização e análise de dados. Niterói: CORDE, TEKSCAN. FlexiForce SensorsUser Manual Disponível em: < Último acesso em 18 de abril de WILSON, M.S; QURESHY, H.; PROTAS, E.J.; HOLMES, S.A.; KROUSKOP, T.A.; SHERWOOD, A.M. Equipment specifications for supported treadmill ambulation training: A technical note. Journal of Rehabilitation Research & Development. v. 37, n. 4, p , 2000.
72 56 WINCHESTER, Patricia et al. Changes in supraspinal activation patterns following robotic locomotor therapy in motor-incomplete spinal cord injury. Neurorehabilitation and Neural Repair. v. 19, p , 2005.WOLFE, C.D. The impact of stroke. British Medical Bulletin. v.56, n.2, p , YAEDU, S. Y. O EFEITO DA ACUPUNTURA, ELETROACUPUNTURA E ESTIMULAÇÃO NERVOSA ELÉTRICA TRANSCUTÂNEA NO TRATAMENTO DOS SINTOMAS DE BRADICINESIA E HIPOCINESIA NA DOENÇA DE PARKINSON: UMA NOVA PERSPECTIVA. Dissertação (Mestrado em Biologia Celular e Molecular) Universidade Federal do Paraná, Curitiba, YAEDU, S. Y.; MARREGA, L. H. G.; FERRAZ, A.; CHU, G. F. D.; Ferretti Manffra, E. INSTRUMENTO PARA AVALIAÇÃO DA BRADICINESIA NA DOENÇA DE PARKINSON. In: XXII Congresso Brasileiro de Engenharia Biomédica, 2010, Tiradentes. Anais do XXII Congresso Brasileiro de Engenharia Biomédica, p

73 ANEXO A DIAGRAMA ESQUEMÁTICO DO CIRCUITO DE ACONDICIONAMENTO DOS SINAIS DOS ELETROGONIÔMETROS, SENSORES DE CONTATO DO PÉ COM O SOLO E CÉLULAS DE CARGA DO COLETE 57
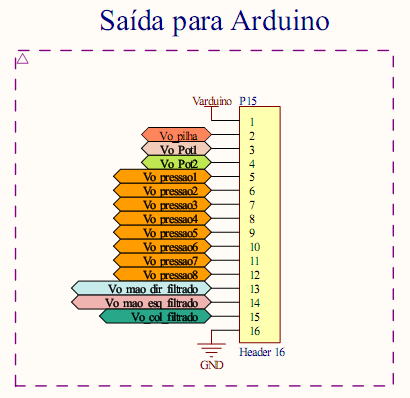
74 58
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA CCET CURSO DE ENGENHARIA DE COMPUTAÇÃO Henrique Soares Hinke José Eduardo da Silva Rodrigues Matheus Augusto de Queiroz
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ CENTRO DE CIÊNCIAS EXATAS E DE TECNOLOGIA CCET CURSO DE ENGENHARIA DE COMPUTAÇÃO Henrique Soares Hinke José Eduardo da Silva Rodrigues Matheus Augusto de Queiroz
www.vwsolucoes.com Copyright 2013 VW Soluções
 1 1. Especificação técnicas: Dimensões do módulo 4EA2SA v1.0: 100 mm x 56 mm Peso aproximado: xxx gramas (montada). Alimentação do circuito : 12 ou 24Vcc Tipo de comunicação: RS232 ou RS485 Tensão de referencia:
1 1. Especificação técnicas: Dimensões do módulo 4EA2SA v1.0: 100 mm x 56 mm Peso aproximado: xxx gramas (montada). Alimentação do circuito : 12 ou 24Vcc Tipo de comunicação: RS232 ou RS485 Tensão de referencia:
Universidade do Vale do Paraíba Faculdade de Engenharias Urbanismo e Arquitetura Curso de Engenharia Elétrica/Eletrônica JANELA SENSORIAL
 1 Universidade do Vale do Paraíba Faculdade de Engenharias Urbanismo e Arquitetura Curso de Engenharia Elétrica/Eletrônica JANELA SENSORIAL BRUNO AUGUSTO CAETANO FERNANDO ALMEIDA SALGADO Relatório do Trabalho
1 Universidade do Vale do Paraíba Faculdade de Engenharias Urbanismo e Arquitetura Curso de Engenharia Elétrica/Eletrônica JANELA SENSORIAL BRUNO AUGUSTO CAETANO FERNANDO ALMEIDA SALGADO Relatório do Trabalho
PROJETO. Ponte Digital. http://www.pontedigital.hpg.ig.com.br/ Luciano Daniel Amarante - carabina@pop.com.br Ricardo Watzko - rw@netuno.com.
 Ponte levadiça digital... Projeto semestral primeira fase de 2003 Engenharia de Computação 4 período Em breve aqui novos projetos... Página inicial Pré-projeto Projeto FOTOS e Vídeos Funcionamento Esboços
Ponte levadiça digital... Projeto semestral primeira fase de 2003 Engenharia de Computação 4 período Em breve aqui novos projetos... Página inicial Pré-projeto Projeto FOTOS e Vídeos Funcionamento Esboços
Ensaio de Emissão Acústica Aplicado em Cilindros sem Costura para Armazenamento de Gases
 Ensaio de Emissão Acústica Aplicado em Cilindros sem Costura para Armazenamento de Gases Pedro Feres Filho São Paulo, Brasil e-mail: pedro@pasa.com.br 1- Resumo Este trabalho teve como objetivo apresentar
Ensaio de Emissão Acústica Aplicado em Cilindros sem Costura para Armazenamento de Gases Pedro Feres Filho São Paulo, Brasil e-mail: pedro@pasa.com.br 1- Resumo Este trabalho teve como objetivo apresentar
Placa Acessório Modem Impacta
 manual do usuário Placa Acessório Modem Impacta Parabéns, você acaba de adquirir um produto com a qualidade e segurança Intelbras. A Placa Modem é um acessório que poderá ser utilizado em todas as centrais
manual do usuário Placa Acessório Modem Impacta Parabéns, você acaba de adquirir um produto com a qualidade e segurança Intelbras. A Placa Modem é um acessório que poderá ser utilizado em todas as centrais
Universidade Federal de Ouro Preto Escola de Minas Departamento de Engenharia de Controle e Automação. Ronilson Rocha
 Universidade Federal de Ouro Preto Escola de Minas Departamento de Engenharia de Controle e Automação PROJETO E CARACTERIZAÇÃO DE CIRCUITOS ELETRÔNICOS CAÓTICOS: O LADO NEGATIVO DO CIRCUITO DE CHUA Ronilson
Universidade Federal de Ouro Preto Escola de Minas Departamento de Engenharia de Controle e Automação PROJETO E CARACTERIZAÇÃO DE CIRCUITOS ELETRÔNICOS CAÓTICOS: O LADO NEGATIVO DO CIRCUITO DE CHUA Ronilson
EXERCÍCIOS RESOLVIDOS
 ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
ENG JR ELETRON 2005 29 O gráfico mostrado na figura acima ilustra o diagrama do Lugar das Raízes de um sistema de 3ª ordem, com três pólos, nenhum zero finito e com realimentação de saída. Com base nas
Desenvolvimento de Módulo Wireless para Acionamento de Cargas via Porta Paralela
 Desenvolvimento de Módulo Wireless para Acionamento de Cargas via Porta Paralela Pedro H. M. Araújo 1, Renan P. Figueiredo 1, Douglas L. Dias 1, Sandro C. S. Jucá 1 1 Área da Telemática Instituto Federal
Desenvolvimento de Módulo Wireless para Acionamento de Cargas via Porta Paralela Pedro H. M. Araújo 1, Renan P. Figueiredo 1, Douglas L. Dias 1, Sandro C. S. Jucá 1 1 Área da Telemática Instituto Federal
3. Cite o nome e características do ponto mais alto e do ponto mais baixo de uma onda?
 Exercícios: 1. Sobre:Ondas Responda: a. O que é a Natureza de Ondas? b. O que origina as Ondas Mecânicas? c. As Ondas Mecânicas se propagam no vácuo? Explique a sua resposta. d. Quais são os elementos
Exercícios: 1. Sobre:Ondas Responda: a. O que é a Natureza de Ondas? b. O que origina as Ondas Mecânicas? c. As Ondas Mecânicas se propagam no vácuo? Explique a sua resposta. d. Quais são os elementos
MÓDULO 7 Modelo OSI. 7.1 Serviços Versus Protocolos
 MÓDULO 7 Modelo OSI A maioria das redes são organizadas como pilhas ou níveis de camadas, umas sobre as outras, sendo feito com o intuito de reduzir a complexidade do projeto da rede. O objetivo de cada
MÓDULO 7 Modelo OSI A maioria das redes são organizadas como pilhas ou níveis de camadas, umas sobre as outras, sendo feito com o intuito de reduzir a complexidade do projeto da rede. O objetivo de cada
Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3
 Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3 A LEGO Education tem o prazer de trazer até você a edição para tablet do Software LEGO MINDSTORMS Education EV3 - um jeito divertido
Introdução ao Aplicativo de Programação LEGO MINDSTORMS Education EV3 A LEGO Education tem o prazer de trazer até você a edição para tablet do Software LEGO MINDSTORMS Education EV3 - um jeito divertido
CHECK - LIST - ISO 9001:2000
 REQUISITOS ISO 9001: 2000 SIM NÃO 1.2 APLICAÇÃO A organização identificou as exclusões de itens da norma no seu manual da qualidade? As exclusões são relacionadas somente aos requisitos da sessão 7 da
REQUISITOS ISO 9001: 2000 SIM NÃO 1.2 APLICAÇÃO A organização identificou as exclusões de itens da norma no seu manual da qualidade? As exclusões são relacionadas somente aos requisitos da sessão 7 da
Estrutura Atuador Bateria
 JACK 250 Kg Jack é um aparelho desenvolvido para facilitar a remoção e locomoção de pacientes. Com ele, tarefas como levar o paciente da cama para uma cadeira e ao banheiro podem ser feitas com muito mais
JACK 250 Kg Jack é um aparelho desenvolvido para facilitar a remoção e locomoção de pacientes. Com ele, tarefas como levar o paciente da cama para uma cadeira e ao banheiro podem ser feitas com muito mais
DESCRIÇÃO VALOR UNIDADE Comprimento máximo
 CAPA Na capa da Ficha Técnica devem estar claramente as informações para identificação da equipe, escola, número do carro, semelhante às capas utilizadas nos relatórios de projeto da competição nacional.
CAPA Na capa da Ficha Técnica devem estar claramente as informações para identificação da equipe, escola, número do carro, semelhante às capas utilizadas nos relatórios de projeto da competição nacional.
Controle para Motores de Passo usando módulo USB-6008
 Departamento de Física e Ciência dos Materiais Caixa Postal 369-13560-970 São Carlos SP Brasil e-mail : andretec@ifsc.usp.br Controle para Motores de Passo usando módulo USB-6008 Introdução Neste projeto
Departamento de Física e Ciência dos Materiais Caixa Postal 369-13560-970 São Carlos SP Brasil e-mail : andretec@ifsc.usp.br Controle para Motores de Passo usando módulo USB-6008 Introdução Neste projeto
UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL
 UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL Física Experimental III - Medidas Elétricas Objetivo O objetivo desta prática é aprender a fazer medições de resistência, tensão
UNIVERSIDADE FEDERAL DE UBERLÂNDIA FACULDADE DE CIÊNCIAS INTEGRADAS DO PONTAL Física Experimental III - Medidas Elétricas Objetivo O objetivo desta prática é aprender a fazer medições de resistência, tensão
Projeto de controle e Automação de Antena
 Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
CAPÍTULO 5. INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO
 28 CAPÍTULO 5 INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO Interfaces para periféricos de armazenamento: Periféricos de armazenamento,
28 CAPÍTULO 5 INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO Interfaces para periféricos de armazenamento: Periféricos de armazenamento,
XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 São Carlos-SP Artigo CREEM2012 SENSOR DE TEMPERATURA WIRELESS
 XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 São Carlos-SP Artigo CREEM2012 SENSOR DE TEMPERATURA WIRELESS Antonio Carlos Lemos Júnior, Ednaldo Lopes Rosa e Leandro Aureliano
XIX Congresso Nacional de Estudantes de Engenharia Mecânica - 13 a 17/08/2012 São Carlos-SP Artigo CREEM2012 SENSOR DE TEMPERATURA WIRELESS Antonio Carlos Lemos Júnior, Ednaldo Lopes Rosa e Leandro Aureliano
CONTROLE DIGITAL DE VOLUME 1.-----------------------------------------------------------------------------
 CONTROLE DIGITAL DE VOLUME 1.----------------------------------------------------------------------------- Uma boa gama de aplicações atuais utiliza o controle de volume digital. Não nos referimos apenas
CONTROLE DIGITAL DE VOLUME 1.----------------------------------------------------------------------------- Uma boa gama de aplicações atuais utiliza o controle de volume digital. Não nos referimos apenas
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A (1) CONVERSOR A/D APROXIMAÇÃO SUCESSIVA (SAR) A figura
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA DEPARTAMENTO DE ENGENHARIA ELÉTRICA ELETRÔNICA SÉRIE DE EXERCÍCIO #A (1) CONVERSOR A/D APROXIMAÇÃO SUCESSIVA (SAR) A figura
Título: Controle de um sistema Bola- Barra com realimentação através de imagem
 Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Título: Controle de um sistema Bola- Barra com realimentação através de imagem Autores: Caio Felipe Favaretto, Henrique Corrêa Ramiro, Rômulo de Oliveira Souza e Marcelo Barboza Silva Professor orientador:
Setores Trilhas. Espaço entre setores Espaço entre trilhas
 Memória Externa Disco Magnético O disco magnético é constituído de um prato circular de metal ou plástico, coberto com um material que poder magnetizado. Os dados são gravados e posteriormente lidos do
Memória Externa Disco Magnético O disco magnético é constituído de um prato circular de metal ou plástico, coberto com um material que poder magnetizado. Os dados são gravados e posteriormente lidos do
TRATAMENTO E ANÁLISE DE SINAIS DE BAIXA FREQUÊNCIA PARA EMULAÇÃO DE CANAL RÁDIO
 TRATAMENTO E ANÁLISE DE SINAIS DE BAIXA FREQUÊNCIA PARA EMULAÇÃO DE CANAL RÁDIO Davi Schmutzler Valim Faculdade de Engenharia Elétrica CEATEC davi_valim@puccampinas.edu.br Resumo: O trabalho trata de fazer
TRATAMENTO E ANÁLISE DE SINAIS DE BAIXA FREQUÊNCIA PARA EMULAÇÃO DE CANAL RÁDIO Davi Schmutzler Valim Faculdade de Engenharia Elétrica CEATEC davi_valim@puccampinas.edu.br Resumo: O trabalho trata de fazer
SHX100. Módulo Shunt. Manual do Produto. AQX Instrumentação Eletrônica S.A.
 SHX100 Módulo Shunt Manual do Produto Rua Lauro Linhares, 589, Sobreloja, sala 1 - Trindade - Florianópolis - SC - 88036-001 Fone: +55 (48) 2107-2724 / 3333-2770- Fax: +55 (48) 3333-3745 Visite nosso site
SHX100 Módulo Shunt Manual do Produto Rua Lauro Linhares, 589, Sobreloja, sala 1 - Trindade - Florianópolis - SC - 88036-001 Fone: +55 (48) 2107-2724 / 3333-2770- Fax: +55 (48) 3333-3745 Visite nosso site
JULIANA CECÍLIA GIPIELA CORRÊA DIAS MARIO HENRIQUE CÉ DEMARIA COOLER AUTOMÁTICO
 PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS MARIO HENRIQUE CÉ DEMARIA COOLER AUTOMÁTICO CURITIBA 19-06-2013 JULIANA
PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ ESCOLA POLITÉCNICA CURSO DE ENGENHARIA DE COMPUTAÇÃO JULIANA CECÍLIA GIPIELA CORRÊA DIAS MARIO HENRIQUE CÉ DEMARIA COOLER AUTOMÁTICO CURITIBA 19-06-2013 JULIANA
Exercícios Leis de Kirchhoff
 Exercícios Leis de Kirchhoff 1-Sobre o esquema a seguir, sabe-se que i 1 = 2A;U AB = 6V; R 2 = 2 Ω e R 3 = 10 Ω. Então, a tensão entre C e D, em volts, vale: a) 10 b) 20 c) 30 d) 40 e) 50 Os valores medidos
Exercícios Leis de Kirchhoff 1-Sobre o esquema a seguir, sabe-se que i 1 = 2A;U AB = 6V; R 2 = 2 Ω e R 3 = 10 Ω. Então, a tensão entre C e D, em volts, vale: a) 10 b) 20 c) 30 d) 40 e) 50 Os valores medidos
Módulo FGM721. Controlador P7C - HI Tecnologia
 Automação Industrial Módulo Controlador P7C - HI Tecnologia 7C O conteúdo deste documento é parte do Manual do Usuário do controlador P7C da HI tecnologia (PMU10700100). A lista de verbetes consta na versão
Automação Industrial Módulo Controlador P7C - HI Tecnologia 7C O conteúdo deste documento é parte do Manual do Usuário do controlador P7C da HI tecnologia (PMU10700100). A lista de verbetes consta na versão
Introdução 5. Amplificação com FET 6. Polarização do FET 6 Polarização do terminal dreno 7 Polarização do terminal porta 7
 Sumário Introdução 5 Amplificação com FET 6 Polarização do FET 6 Polarização do terminal dreno 7 Polarização do terminal porta 7 Estágio amplificador com FET 8 Princípio de funcionamento 9 Características
Sumário Introdução 5 Amplificação com FET 6 Polarização do FET 6 Polarização do terminal dreno 7 Polarização do terminal porta 7 Estágio amplificador com FET 8 Princípio de funcionamento 9 Características
DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL
 1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
1 DESENVOLVIMENTO DE UM ROBÔ MANIPULADOR INDUSTRIAL Carlos Henrique Gonçalves Campbell Camila Lobo Coutinho Jediael Pinto Júnior Associação Educacional Dom Bosco 1. Objetivo do Trabalho Desenvolvimento
Manual de Instruções. Crossover 4 Vias HD-X4W. Especificações Técnicas (Crossover 4 Vias) Nível máximo de entrada
 Nível máximo de entrada") Especificações Técnicas (Crossover 4 Vias) Nível máximo de entrada 9V RMS Tweeter CH Crossover /octave 2K, 4K, 6K, 8K Mid CH Crossover /octave Low: 0, 0, 0Hz em Flat High:,, 1,Hz Mid Bass Crossover /octave
Especificações Técnicas (Crossover 4 Vias) Nível máximo de entrada 9V RMS Tweeter CH Crossover /octave 2K, 4K, 6K, 8K Mid CH Crossover /octave Low: 0, 0, 0Hz em Flat High:,, 1,Hz Mid Bass Crossover /octave
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA
 FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
FAPERJ & PIUES/PUC-Rio FÍSICA E MATEMÁTICA DO ENSINO MÉDIO APLICADAS A SISTEMAS DE ENGENHARIA 1) INTRODUÇÃO Rio de Janeiro, 05 de Maio de 2015. A equipe desenvolvedora deste projeto conta com: - Prof.
Conceitos Básicos de Telefonia Celular
 O curso foi elaborado especialmente para atender o profissional que atua no mercado varejista de aparelhos celulares e quer atender seus clientes com rapidez e qualidade. O treinamento é direcionado ao
O curso foi elaborado especialmente para atender o profissional que atua no mercado varejista de aparelhos celulares e quer atender seus clientes com rapidez e qualidade. O treinamento é direcionado ao
Aplicações com OpAmp. 1) Amplificadores básicos. Amplificador Inversor
 Amplificadores básicos. Amplificador Inversor") 225 Aplicações com OpAmp A quantidade de circuitos que podem ser implementados com opamps é ilimitada. Selecionamos aqueles circuitos mais comuns na prática e agrupamos por categorias. A A seguir passaremos
225 Aplicações com OpAmp A quantidade de circuitos que podem ser implementados com opamps é ilimitada. Selecionamos aqueles circuitos mais comuns na prática e agrupamos por categorias. A A seguir passaremos
Tutorial de Eletrônica Aplicações com 555 v2010.05
 Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
Tutorial de Eletrônica Aplicações com 555 v2010.05 Linha de Equipamentos MEC Desenvolvidos por: Maxwell Bohr Instrumentação Eletrônica Ltda. Rua Porto Alegre, 212 Londrina PR Brasil http://www.maxwellbohr.com.br
LEI DE OHM. Professor João Luiz Cesarino Ferreira. Conceitos fundamentais
 LEI DE OHM Conceitos fundamentais Ao adquirir energia cinética suficiente, um elétron se transforma em um elétron livre e se desloca até colidir com um átomo. Com a colisão, ele perde parte ou toda energia
LEI DE OHM Conceitos fundamentais Ao adquirir energia cinética suficiente, um elétron se transforma em um elétron livre e se desloca até colidir com um átomo. Com a colisão, ele perde parte ou toda energia
Megôhmetro Digital de 12kV
 Megôhmetro Digital de 12kV Funções: Maior flexibilidade para testar máquinas de alta tensão, se comparado aos instrumentos comuns com tensão de medição de 5/10kV. A alta corrente de curto aumenta a velocidade
Megôhmetro Digital de 12kV Funções: Maior flexibilidade para testar máquinas de alta tensão, se comparado aos instrumentos comuns com tensão de medição de 5/10kV. A alta corrente de curto aumenta a velocidade
Bancada de Testes Hidrostáticos e Pneumáticos
 Bancada de Testes Hidrostáticos e Pneumáticos 1 Concepção O que é a bancada de testes da Valeq? Esta bancada foi desenvolvia com a intenção de agilizar os testes de campo e de bancada que envolvem pressão.
Bancada de Testes Hidrostáticos e Pneumáticos 1 Concepção O que é a bancada de testes da Valeq? Esta bancada foi desenvolvia com a intenção de agilizar os testes de campo e de bancada que envolvem pressão.
Objetivo A presente prática tem por objetivo verificar na prática os diferentes modos de disparo dos TRIACs.
 Universidade Federal do Paraná Curso de Engenharia Elétrica Laboratório de Engenharia Elétrica V TE067 Prof. James Alexandre Baraniuk Equipe: Data: / / EXPERIMENTO PRÁTICO COM TRIAC Objetivo A presente
Universidade Federal do Paraná Curso de Engenharia Elétrica Laboratório de Engenharia Elétrica V TE067 Prof. James Alexandre Baraniuk Equipe: Data: / / EXPERIMENTO PRÁTICO COM TRIAC Objetivo A presente
Controle de Múltiplos Pivôs Centrais com um único Conjunto Motor-Bomba
 Controle de Múltiplos Pivôs Centrais com um único Conjunto Motor-Bomba Thiago de Lima MUNIZ, Bernardo Pinheiro de ALVARENGA, José Wilson de Lima NERYS, Antônio Marcos de Melo MEDEIROS Escola de Engenharia
Controle de Múltiplos Pivôs Centrais com um único Conjunto Motor-Bomba Thiago de Lima MUNIZ, Bernardo Pinheiro de ALVARENGA, José Wilson de Lima NERYS, Antônio Marcos de Melo MEDEIROS Escola de Engenharia
Filtros de sinais. Conhecendo os filtros de sinais.
 Filtros de sinais Nas aulas anteriores estudamos alguns conceitos importantes sobre a produção e propagação das ondas eletromagnéticas, além de analisarmos a constituição de um sistema básico de comunicações.
Filtros de sinais Nas aulas anteriores estudamos alguns conceitos importantes sobre a produção e propagação das ondas eletromagnéticas, além de analisarmos a constituição de um sistema básico de comunicações.
Funções de Posicionamento para Controle de Eixos
 Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
Funções de Posicionamento para Controle de Eixos Resumo Atualmente muitos Controladores Programáveis (CPs) classificados como de pequeno porte possuem, integrados em um único invólucro, uma densidade significativa
CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES
 CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 1 a QUESTÃO Valor: 1,00 A L 0 H mola apoio sem atrito B A figura acima mostra um sistema composto por uma parede vertical
CONCURSO DE ADMISSÃO AO CURSO DE FORMAÇÃO E GRADUAÇÃO FÍSICA CADERNO DE QUESTÕES 1 a QUESTÃO Valor: 1,00 A L 0 H mola apoio sem atrito B A figura acima mostra um sistema composto por uma parede vertical
Estabilizada de. PdP. Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006
 TUTORIAL Fonte Estabilizada de 5 Volts Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
TUTORIAL Fonte Estabilizada de 5 Volts Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br
Projetos de Eletrônica Básica II
 Projetos de Eletrônica Básica II MUITO CUIDADO NA MONTAGEM DOS CIRCUITOS, JÁ QUE SE ESTÁ TRABALHANDO COM A REDE ELÉTRICA. Projete um sistema para uma casa inteligente, com as seguintes características:
Projetos de Eletrônica Básica II MUITO CUIDADO NA MONTAGEM DOS CIRCUITOS, JÁ QUE SE ESTÁ TRABALHANDO COM A REDE ELÉTRICA. Projete um sistema para uma casa inteligente, com as seguintes características:
Aparelhos de Laboratório de Electrónica
 Aparelhos de Laboratório de Electrónica Este texto pretende fazer uma introdução sucinta às características fundamentais dos aparelhos utilizados no laboratório. As funcionalidades descritas são as existentes
Aparelhos de Laboratório de Electrónica Este texto pretende fazer uma introdução sucinta às características fundamentais dos aparelhos utilizados no laboratório. As funcionalidades descritas são as existentes
Modulador e demodulador PWM
 Modulador e demodulador PWM 2 ATENÇÃO O autor não se responsabiliza pelo uso indevido das informações aqui apresentadas. Danos causados a qualquer equipamento utilizado juntamente com os circuitos aqui
Modulador e demodulador PWM 2 ATENÇÃO O autor não se responsabiliza pelo uso indevido das informações aqui apresentadas. Danos causados a qualquer equipamento utilizado juntamente com os circuitos aqui
Ao longo do presente capítulo será apresentada uma descrição introdutória da tecnologia FPGA e dos módulos básicos que a constitui.
 3 Tecnologia FPGA Ao longo do presente capítulo será apresentada uma descrição introdutória da tecnologia FPGA e dos módulos básicos que a constitui. 3.1. FPGA: Histórico, linguagens e blocos Muitos dos
3 Tecnologia FPGA Ao longo do presente capítulo será apresentada uma descrição introdutória da tecnologia FPGA e dos módulos básicos que a constitui. 3.1. FPGA: Histórico, linguagens e blocos Muitos dos
Fundamentos de Hardware
 Fundamentos de Hardware Curso Técnico em Informática SUMÁRIO PLACAS DE EXPANSÃO... 3 PLACAS DE VÍDEO... 3 Conectores de Vídeo... 4 PLACAS DE SOM... 6 Canais de Áudio... 7 Resolução das Placas de Som...
Fundamentos de Hardware Curso Técnico em Informática SUMÁRIO PLACAS DE EXPANSÃO... 3 PLACAS DE VÍDEO... 3 Conectores de Vídeo... 4 PLACAS DE SOM... 6 Canais de Áudio... 7 Resolução das Placas de Som...
(Open System Interconnection)
") O modelo OSI (Open System Interconnection) Modelo geral de comunicação Modelo de referência OSI Comparação entre o modelo OSI e o modelo TCP/IP Analisando a rede em camadas Origem, destino e pacotes de
O modelo OSI (Open System Interconnection) Modelo geral de comunicação Modelo de referência OSI Comparação entre o modelo OSI e o modelo TCP/IP Analisando a rede em camadas Origem, destino e pacotes de
APLICAÇÃO PARA ANÁLISE GRÁFICA DE EXERCÍCIO FÍSICO A PARTIR DA PLATAFORMA ARDUINO
 APLICAÇÃO PARA ANÁLISE GRÁFICA DE EXERCÍCIO FÍSICO A PARTIR DA PLATAFORMA ARDUINO Alessandro A. M de Oliveira 1 ; Alexandre de Oliveira Zamberlan 1 ; Péricles Pinheiro Feltrin 2 ; Rafael Ogayar Gomes 3
APLICAÇÃO PARA ANÁLISE GRÁFICA DE EXERCÍCIO FÍSICO A PARTIR DA PLATAFORMA ARDUINO Alessandro A. M de Oliveira 1 ; Alexandre de Oliveira Zamberlan 1 ; Péricles Pinheiro Feltrin 2 ; Rafael Ogayar Gomes 3
Aula Prática 6 Circuitos Elétricos III Carga e Descarga da Capacitores
 Aula Prática 6 Circuitos Elétricos III Carga e Descarga da Capacitores Disciplinas: Física III (ENG 06034) Fundamentos de Física III (ENG 10079) Física Experimental II ( DQF 10441) Depto Química e Física
Aula Prática 6 Circuitos Elétricos III Carga e Descarga da Capacitores Disciplinas: Física III (ENG 06034) Fundamentos de Física III (ENG 10079) Física Experimental II ( DQF 10441) Depto Química e Física
Introdução Teórica Aula 4: Potenciômetros e Lâmpadas. Potenciômetros. Lâmpadas. EEL7011 Eletricidade Básica Aula 4
 Introdução Teórica Aula 4: Potenciômetros e Lâmpadas Potenciômetros Um potenciômetro é um resistor cujo valor de resistência é variável. Assim, de forma indireta, é possível controlar a intensidade da
Introdução Teórica Aula 4: Potenciômetros e Lâmpadas Potenciômetros Um potenciômetro é um resistor cujo valor de resistência é variável. Assim, de forma indireta, é possível controlar a intensidade da
RELATÓRIO FINAL DE INSTRUMENTAÇÃO F 530 BALANÇA A BASE DE PIEZOELÉTRICOS
 RELATÓRIO FINAL DE INSTRUMENTAÇÃO F 530 BALANÇA A BASE DE PIEZOELÉTRICOS Aluna: Thais Moreno Casagrande RA:025245 Orientador: Prof. Juan Carlos P. Campoy Prof. Responsável: Dr. José Joaquim Lunazzi IFGW/UNICAMP
RELATÓRIO FINAL DE INSTRUMENTAÇÃO F 530 BALANÇA A BASE DE PIEZOELÉTRICOS Aluna: Thais Moreno Casagrande RA:025245 Orientador: Prof. Juan Carlos P. Campoy Prof. Responsável: Dr. José Joaquim Lunazzi IFGW/UNICAMP
RECEPTOR AM DSB. Transmissor. Circuito Receptor AM DSB - Profº Vitorino 1
 RECEPTOR AM DSB Transmissor Circuito Receptor AM DSB - Profº Vitorino 1 O receptor super-heteródino O circuito demodulador que vimos anteriormente é apenas parte de um circuito mais sofisticado capaz de
RECEPTOR AM DSB Transmissor Circuito Receptor AM DSB - Profº Vitorino 1 O receptor super-heteródino O circuito demodulador que vimos anteriormente é apenas parte de um circuito mais sofisticado capaz de
Índice. Utilizando o integrado 555... 03. Operação monoestável (Temporizador)... 06. Operação astável (Oscilador)... 07
... 06. Operação astável (Oscilador)... 07") Utilizando o CI 555 Índice Utilizando o integrado 555... 03 Operação monoestável (Temporizador)... 06 Operação astável (Oscilador)... 07 O circuito integrado 556... 10 Aplicações úteis... 11 Gerador de
Utilizando o CI 555 Índice Utilizando o integrado 555... 03 Operação monoestável (Temporizador)... 06 Operação astável (Oscilador)... 07 O circuito integrado 556... 10 Aplicações úteis... 11 Gerador de
Introdução. Criar um sistema capaz de interagir com o ambiente. Um transdutor é um componente que transforma um tipo de energia em outro.
 SENSORES Introdução Criar um sistema capaz de interagir com o ambiente. Num circuito eletrônico o sensor é o componente que sente diretamente alguma característica física do meio em que esta inserido,
SENSORES Introdução Criar um sistema capaz de interagir com o ambiente. Num circuito eletrônico o sensor é o componente que sente diretamente alguma característica física do meio em que esta inserido,
SISTEMA COMPUTADORIZADO PARA GERENCIAMENTO DE PURGADORES DE VAPOR
 SISTEMA COMPUTADORIZADO PARA GERENCIAMENTO DE PURGADORES DE VAPOR Patenteado. Gerenciamento no século 21. Tópicos fundamentais que compõem o gerenciamento: Manutenção Produtiva Total (MPT): Estabelece
SISTEMA COMPUTADORIZADO PARA GERENCIAMENTO DE PURGADORES DE VAPOR Patenteado. Gerenciamento no século 21. Tópicos fundamentais que compõem o gerenciamento: Manutenção Produtiva Total (MPT): Estabelece
Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006. PdP. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Montagem da Ponte H Autor: Luís Fernando Patsko Nível: Intermediário Criação: 22/02/2006 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
Cap 01 - Conceitos Básicos de Rede (Kurose)
") Cap 01 - Conceitos Básicos de Rede (Kurose) 1. Quais são os tipos de redes de computadores e qual a motivação para estudá-las separadamente? Lan (Local Area Networks) MANs(Metropolitan Area Networks) WANs(Wide
Cap 01 - Conceitos Básicos de Rede (Kurose) 1. Quais são os tipos de redes de computadores e qual a motivação para estudá-las separadamente? Lan (Local Area Networks) MANs(Metropolitan Area Networks) WANs(Wide
11 de maio de 2011. Análise do uso dos Resultados _ Proposta Técnica
 11 de maio de 2011 Análise do uso dos Resultados _ Proposta Técnica 1 ANÁLISE DOS RESULTADOS DO SPAECE-ALFA E DAS AVALIAÇÕES DO PRÊMIO ESCOLA NOTA DEZ _ 2ª Etapa 1. INTRODUÇÃO Em 1990, o Sistema de Avaliação
11 de maio de 2011 Análise do uso dos Resultados _ Proposta Técnica 1 ANÁLISE DOS RESULTADOS DO SPAECE-ALFA E DAS AVALIAÇÕES DO PRÊMIO ESCOLA NOTA DEZ _ 2ª Etapa 1. INTRODUÇÃO Em 1990, o Sistema de Avaliação
MÓDULO SINTETIZADOR.
 MÓDULO SINTETIZADOR. O módulo sintetizador é uma placa (PCA) de 3,5pol x 9 pol, ligada a placa mãe em J4 e localizada imediatamente adjacente ao módulo de Referência/Controle do transceptor. Como o módulo
MÓDULO SINTETIZADOR. O módulo sintetizador é uma placa (PCA) de 3,5pol x 9 pol, ligada a placa mãe em J4 e localizada imediatamente adjacente ao módulo de Referência/Controle do transceptor. Como o módulo
Corrente elétrica corrente elétrica.
 Corrente elétrica Vimos que os elétrons se deslocam com facilidade em corpos condutores. O deslocamento dessas cargas elétricas é chamado de corrente elétrica. A corrente elétrica é responsável pelo funcionamento
Corrente elétrica Vimos que os elétrons se deslocam com facilidade em corpos condutores. O deslocamento dessas cargas elétricas é chamado de corrente elétrica. A corrente elétrica é responsável pelo funcionamento
Retificador No Break duo
 Retificador No Break duo Manual do Usuário ccntelecom.com.br O Retificador No Break duo O Retificador No Break duo é um equipamento desenvolvido para facilitar a alimentação e organização de redes de dados
Retificador No Break duo Manual do Usuário ccntelecom.com.br O Retificador No Break duo O Retificador No Break duo é um equipamento desenvolvido para facilitar a alimentação e organização de redes de dados
GT BLOCK LBS RASTREAMENTO VIA CÉLULA COM BLOQUEADOR
 GT BLOCK LBS RASTREAMENTO VIA CÉLULA COM BLOQUEADOR Esta tecnologia torna possível o sistema de anti sequestro, rastreamento, escuta e bloqueio de veículos conforme a área de cobertura, que ao ser acionado,
GT BLOCK LBS RASTREAMENTO VIA CÉLULA COM BLOQUEADOR Esta tecnologia torna possível o sistema de anti sequestro, rastreamento, escuta e bloqueio de veículos conforme a área de cobertura, que ao ser acionado,
PROTÓTIPO DE ATENDIMENTO DOMICILIAR AUTOMATIZADO: HOME CARE DE BAIXO CUSTO
 PROTÓTIPO DE ATENDIMENTO DOMICILIAR AUTOMATIZADO: HOME CARE DE BAIXO CUSTO Wilker Luiz Machado Barros¹, Wyllian Fressatti¹ ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil wilkermachado1@hotmail.com,
PROTÓTIPO DE ATENDIMENTO DOMICILIAR AUTOMATIZADO: HOME CARE DE BAIXO CUSTO Wilker Luiz Machado Barros¹, Wyllian Fressatti¹ ¹Universidade Paranaense (Unipar) Paranavaí PR Brasil wilkermachado1@hotmail.com,
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
Tecnologia PCI express. Introdução. Tecnologia PCI Express
 Tecnologia PCI express Introdução O desenvolvimento de computadores cada vez mais rápidos e eficientes é uma necessidade constante. No que se refere ao segmento de computadores pessoais, essa necessidade
Tecnologia PCI express Introdução O desenvolvimento de computadores cada vez mais rápidos e eficientes é uma necessidade constante. No que se refere ao segmento de computadores pessoais, essa necessidade
Plano de Trabalho Docente 2015. Ensino Técnico
 Plano de Trabalho Docente 2015 Ensino Técnico Etec Etec: Monsenhor Antônio Magliano. Código: 088 Município: Garça. Eixo Tecnológico: Controle e Processos Industriais. Habilitação Profissional: Técnica
Plano de Trabalho Docente 2015 Ensino Técnico Etec Etec: Monsenhor Antônio Magliano. Código: 088 Município: Garça. Eixo Tecnológico: Controle e Processos Industriais. Habilitação Profissional: Técnica
Estrutura da Gestão de Risco Operacional
 Conceito No Brasil a Resolução n.º 3380, emitida pelo BACEN em 29 de junho de 2006, seguindo as diretrizes estabelecidas pelo Conselho Monetário Nacional, definiu como: A possibilidade de ocorrência de
Conceito No Brasil a Resolução n.º 3380, emitida pelo BACEN em 29 de junho de 2006, seguindo as diretrizes estabelecidas pelo Conselho Monetário Nacional, definiu como: A possibilidade de ocorrência de
Miguel C. Branchtein, Delegacia Regional do Trabalho no Rio Grande do Sul
 DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
DETERMINAÇÃO DE CONDIÇÃO DE ACIONAMENTO DE FREIO DE EMERGÊNCIA TIPO "VIGA FLUTUANTE" DE ELEVADOR DE OBRAS EM CASO DE QUEDA DA CABINE SEM RUPTURA DO CABO Miguel C. Branchtein, Delegacia Regional do Trabalho
Amostrador PAM A/D PCM D/A PAM Filtro. Figura 1 Digrama de Blocos PCM
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA SISTEMAS DE TELECOMUNICAÇÕES I AULA PRÁTICA MODULAÇÃO POR AMPLITUDE DE PULSOS 1. Introdução Como o sinal
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA SISTEMAS DE TELECOMUNICAÇÕES I AULA PRÁTICA MODULAÇÃO POR AMPLITUDE DE PULSOS 1. Introdução Como o sinal
Gerenciamento de Projetos Modulo II Ciclo de Vida e Organização do Projeto
 Gerenciamento de Projetos Modulo II Ciclo de Vida e Organização do Projeto Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com PMBoK Organização do Projeto Os projetos e o gerenciamento
Gerenciamento de Projetos Modulo II Ciclo de Vida e Organização do Projeto Prof. Walter Cunha falecomigo@waltercunha.com http://waltercunha.com PMBoK Organização do Projeto Os projetos e o gerenciamento
Caracterização temporal de circuitos: análise de transientes e regime permanente. Condições iniciais e finais e resolução de exercícios.
 Conteúdo programático: Elementos armazenadores de energia: capacitores e indutores. Revisão de características técnicas e relações V x I. Caracterização de regime permanente. Caracterização temporal de
Conteúdo programático: Elementos armazenadores de energia: capacitores e indutores. Revisão de características técnicas e relações V x I. Caracterização de regime permanente. Caracterização temporal de
Manual do instalador Box Input Rev. 0.01.000. Figura 01 Apresentação do Box Input.
 Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
Pág. 1/10 Apresentação Equipamento para detecção de acionamentos e monitoração de sensores. Comunicação com outros dispositivos por rede CAN. Possui seis entradas digitais optoacopladas com indicação de
Programação de Robótica: Modo Circuitos Programados - Avançado -
 Programação de Robótica: Modo Circuitos Programados - Avançado - 1 Programação de Robótica: Modo Circuitos Programados - Avançado ATENÇÃO Lembramos que você poderá consultar o Manual de Referência do Software
Programação de Robótica: Modo Circuitos Programados - Avançado - 1 Programação de Robótica: Modo Circuitos Programados - Avançado ATENÇÃO Lembramos que você poderá consultar o Manual de Referência do Software
Concurso Público para o provimento de vagas em Cargos de Nível Superior da Carreira de Desenvolvimento Tecnológico CÓDIGO DA VAGA: TP06
 QUESTÕES DE MÚLTIPLAS ESCOLHAS 1. Nos estágios iniciais da atividade profissional, um técnico ou tecnólogo executará atividades nos níveis operacionais e de gerência. É correto afirmar que, como administrador,
QUESTÕES DE MÚLTIPLAS ESCOLHAS 1. Nos estágios iniciais da atividade profissional, um técnico ou tecnólogo executará atividades nos níveis operacionais e de gerência. É correto afirmar que, como administrador,
DESENVOLVIMENTO DE CIRCUITOS CONVERSORES DIGITAL-ANALÓGICOS PARA CONTROLE DE POLARIZAÇÃO
 DESENVOLVIMENTO DE CIRCUITOS CONVERSORES DIGITAL-ANALÓGICOS PARA CONTROLE DE POLARIZAÇÃO Aluno: Joaquim Masset Lacombe Dias Garcia Aluna: Ana Sofia Viotti Daker Aranha Orientador: Guilherme Penello Temporão
DESENVOLVIMENTO DE CIRCUITOS CONVERSORES DIGITAL-ANALÓGICOS PARA CONTROLE DE POLARIZAÇÃO Aluno: Joaquim Masset Lacombe Dias Garcia Aluna: Ana Sofia Viotti Daker Aranha Orientador: Guilherme Penello Temporão
4 Arquitetura básica de um analisador de elementos de redes
 4 Arquitetura básica de um analisador de elementos de redes Neste capítulo é apresentado o desenvolvimento de um dispositivo analisador de redes e de elementos de redes, utilizando tecnologia FPGA. Conforme
4 Arquitetura básica de um analisador de elementos de redes Neste capítulo é apresentado o desenvolvimento de um dispositivo analisador de redes e de elementos de redes, utilizando tecnologia FPGA. Conforme
1- Scilab e a placa Lab_Uino. 2- Instalação do ToolBox
 1- Scilab e a placa Lab_Uino A placa Lab_Uino, é uma plataforma aberta para aprendizagem de sistemas microprocessados. Com a utilização de um firmware especifico a placa Lab_Uino é reconhecido pelo sistema
1- Scilab e a placa Lab_Uino A placa Lab_Uino, é uma plataforma aberta para aprendizagem de sistemas microprocessados. Com a utilização de um firmware especifico a placa Lab_Uino é reconhecido pelo sistema
Pontifícia Universidade Católica do Paraná - PUCPR. Centro de Ciências Exatas e Tecnologia - CCET. Engenharia de Computação
 Pontifícia Universidade Católica do Paraná - PUCPR Centro de Ciências Exatas e Tecnologia - CCET Engenharia de Computação Jean Carlo Ferreira Tambosi Raul Silva Donato Victor Henrique Alves Ribeiro Gerador
Pontifícia Universidade Católica do Paraná - PUCPR Centro de Ciências Exatas e Tecnologia - CCET Engenharia de Computação Jean Carlo Ferreira Tambosi Raul Silva Donato Victor Henrique Alves Ribeiro Gerador
Espectro da Voz e Conversão A/D
 INSTITUTO SUPERIOR TÉCNICO LICENCIATURA EM ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES GUIA DO 1º TRABALHO DE LABORATÓRIO DE SISTEMAS DE TELECOMUNICAÇÕES I Espectro da Voz e Conversão A/D Ano Lectivo de
INSTITUTO SUPERIOR TÉCNICO LICENCIATURA EM ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES GUIA DO 1º TRABALHO DE LABORATÓRIO DE SISTEMAS DE TELECOMUNICAÇÕES I Espectro da Voz e Conversão A/D Ano Lectivo de
Conjunto Sensor IR Para quem tem fome de vencer
 Conjunto Sensor IR Para quem tem fome de vencer Introdução: Muito obrigado por adquirir este produto. Ele foi projetado de forma a oferecer a melhor performance possível dentro de sua aplicação. Fornecemos
Conjunto Sensor IR Para quem tem fome de vencer Introdução: Muito obrigado por adquirir este produto. Ele foi projetado de forma a oferecer a melhor performance possível dentro de sua aplicação. Fornecemos
II Encontro de Ciência e Tecnologia FARO/IJN. Edital 2015. Tema: LUZ, CIÊNCIA E VIDA.
 II Encontro de Ciência e Tecnologia FARO/IJN Edital 2015 Tema: LUZ, CIÊNCIA E VIDA. A Direção da Faculdade de Rondônia FARO/IJN torna público, por meio deste edital, as informações para realização do II
II Encontro de Ciência e Tecnologia FARO/IJN Edital 2015 Tema: LUZ, CIÊNCIA E VIDA. A Direção da Faculdade de Rondônia FARO/IJN torna público, por meio deste edital, as informações para realização do II
Vida Útil de Baterias Tracionárias
 Vida Útil de Baterias Tracionárias Seção 1 Introdução. Seção 2 Vida Útil Projetada. ÍNDICE Seção 3 Fatores que Afetam a Vida Útil da Bateria. Seção 3.1 Problemas de Produto. Seção 3.2 Problemas de Manutenção.
Vida Útil de Baterias Tracionárias Seção 1 Introdução. Seção 2 Vida Útil Projetada. ÍNDICE Seção 3 Fatores que Afetam a Vida Útil da Bateria. Seção 3.1 Problemas de Produto. Seção 3.2 Problemas de Manutenção.
Sistemas Computacionais II Professor Frederico Sauer
 Sistemas Computacionais II Professor Frederico Sauer Livro-texto: Introdução à Organização de Computadores 4ª edição Mário A. Monteiro Livros Técnicos e Científicos Editora. Atenção: Este material não
Sistemas Computacionais II Professor Frederico Sauer Livro-texto: Introdução à Organização de Computadores 4ª edição Mário A. Monteiro Livros Técnicos e Científicos Editora. Atenção: Este material não
ANEMÔMETRO A FIO QUENTE
 UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÀO ELTRÔNICA ANEMÔMETRO A FIO QUENTE Cayo Cid de França Moraes 200321285 Natal/RN ANEMÔMETRO
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA DEPARTAMENTO DE ENGENHARIA ELÉTRICA INSTRUMENTAÇÀO ELTRÔNICA ANEMÔMETRO A FIO QUENTE Cayo Cid de França Moraes 200321285 Natal/RN ANEMÔMETRO
DESCRITIVO TÉCNICO. 1 Alimentador
 DESCRITIVO TÉCNICO Nome Equipamento: Máquina automática para corte de silício 45º e perna central até 400 mm largura Código: MQ-0039-NEP Código Finame: *** Classificação Fiscal: 8462.39.0101 1 Alimentador
DESCRITIVO TÉCNICO Nome Equipamento: Máquina automática para corte de silício 45º e perna central até 400 mm largura Código: MQ-0039-NEP Código Finame: *** Classificação Fiscal: 8462.39.0101 1 Alimentador
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA
 UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA LISTA DE EXERCÍCIOS #11 (1) O circuito a seguir é usado como pré-amplificador
UNIVERSIDADE FEDERAL DE CAMPINA GRANDE CENTRO DE ENGENHARIA ELÉTRICA E INFORMÁTICA UNIDADE ACADEMICA DE ENGENHARIA ELÉTRICA ELETRÔNICA LISTA DE EXERCÍCIOS #11 (1) O circuito a seguir é usado como pré-amplificador
DEFINIÇÃO DE UMA REDE DE SENSORES SEM FIO PARA A ARQUITETURA AGROMOBILE 1
 DEFINIÇÃO DE UMA REDE DE SENSORES SEM FIO PARA A ARQUITETURA AGROMOBILE 1 Marcos Sulzbach Morgenstern 2, Roger Victor Alves 3, Vinicius Maran 4. 1 Projeto de Pesquisa Agromobile - Uma Arquitetura de Auxílio
DEFINIÇÃO DE UMA REDE DE SENSORES SEM FIO PARA A ARQUITETURA AGROMOBILE 1 Marcos Sulzbach Morgenstern 2, Roger Victor Alves 3, Vinicius Maran 4. 1 Projeto de Pesquisa Agromobile - Uma Arquitetura de Auxílio
ICORLI. INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET
 INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET 2010/2011 1 Protocolo TCP/IP É um padrão de comunicação entre diferentes computadores e diferentes sistemas operativos. Cada computador deve
INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET 2010/2011 1 Protocolo TCP/IP É um padrão de comunicação entre diferentes computadores e diferentes sistemas operativos. Cada computador deve
Diminua seu tempo total de treino e queime mais gordura
 Diminua seu tempo total de treino e queime mais gordura Neste artigo vou mostrar o principal tipo de exercício para acelerar a queima de gordura sem se matar durante horas na academia. Vou mostrar e explicar
Diminua seu tempo total de treino e queime mais gordura Neste artigo vou mostrar o principal tipo de exercício para acelerar a queima de gordura sem se matar durante horas na academia. Vou mostrar e explicar
Universidade Federal do Espírito Santo Centro Tecnológico Departamento de Informática Programa de Pós-Graduação em Informática
 Universidade Federal do Espírito Santo Centro Tecnológico Departamento de Informática Programa de Pós-Graduação em Informática Disciplina: INF5008 Prof.: (monalessa@inf.ufes.br) Conteúdo 3. Gerência de
Universidade Federal do Espírito Santo Centro Tecnológico Departamento de Informática Programa de Pós-Graduação em Informática Disciplina: INF5008 Prof.: (monalessa@inf.ufes.br) Conteúdo 3. Gerência de
1.3 Conectando a rede de alimentação das válvulas solenóides
 1.3 Conectando a rede de alimentação das válvulas solenóides CONTROLE DE FLUSHING AUTOMÁTICO LCF 12 Modo Periódico e Horário www.lubing.com.br (19) 3583-6929 DESCALVADO SP 1. Instalação O equipamento deve
1.3 Conectando a rede de alimentação das válvulas solenóides CONTROLE DE FLUSHING AUTOMÁTICO LCF 12 Modo Periódico e Horário www.lubing.com.br (19) 3583-6929 DESCALVADO SP 1. Instalação O equipamento deve
O QUE É TREINAMENTO FUNCIONAL? Por Artur Monteiro e Thiago Carneiro
 O QUE É TREINAMENTO FUNCIONAL? Por Artur Monteiro e Thiago Carneiro O corpo humano é projetado para funcionar como uma unidade, com os músculos sendo ativados em seqüências especifica para produzir um
O QUE É TREINAMENTO FUNCIONAL? Por Artur Monteiro e Thiago Carneiro O corpo humano é projetado para funcionar como uma unidade, com os músculos sendo ativados em seqüências especifica para produzir um
Revisão de Estatística Básica:
 Revisão de Estatística Básica: Estatística: Um número é denominado uma estatística (singular). Ex.: As vendas de uma empresa no mês constituem uma estatística. Estatísticas: Uma coleção de números ou fatos
Revisão de Estatística Básica: Estatística: Um número é denominado uma estatística (singular). Ex.: As vendas de uma empresa no mês constituem uma estatística. Estatísticas: Uma coleção de números ou fatos
Amplificadores Operacionais
 Análise de Circuitos LEE 2006/07 Guia de Laboratório Trabalho 2 Amplificadores Operacionais INSTITUTO SUPERIOR TÉCNICO Departamento de Engenharia Electrotécnica e de Computadores Paulo Flores 1 Objectivos
Análise de Circuitos LEE 2006/07 Guia de Laboratório Trabalho 2 Amplificadores Operacionais INSTITUTO SUPERIOR TÉCNICO Departamento de Engenharia Electrotécnica e de Computadores Paulo Flores 1 Objectivos
Sistema de Leitura da Porta de Mouse do PC
 FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA Projeto para Trabalho Trimestral de Física Curso: Técnico em Eletrônica Turma: 4312 Data: 18/10/2005 Sala : 224 Aluno: Cleber Moraes n : 5 Aluno:
FUNDAÇÃO ESCOLA TÉCNICA LIBERATO SALZANO VIEIRA DA CUNHA Projeto para Trabalho Trimestral de Física Curso: Técnico em Eletrônica Turma: 4312 Data: 18/10/2005 Sala : 224 Aluno: Cleber Moraes n : 5 Aluno: