CONTROLE DE TRAÇÃO E DIREÇÃO DE UM VEÍCULO AUTÔNOMO NÃO TRIPULADO. Carla Real Amorim Cardoso Prof. Antônio Carlos Tavares - Orientador
|
|
|
- Inês de Vieira Melgaço
- 6 Há anos
- Visualizações:
Transcrição
1 CONTROLE DE TRAÇÃO E DIREÇÃO DE UM VEÍCULO AUTÔNOMO NÃO TRIPULADO Carla Real Amorim Cardoso Prof. Antônio Carlos Tavares - Orientador
2 Roteiro 1. Introdução 2. Objetivos do trabalho 3. Fundamentação teórica 4. Desenvolvimento do trabalho 5. Resultados 6. Conclusões 7. Extensões
3 Introdução Tecnologia dos microprocessadores Segurança, conforto e praticidade Segway meio de transporte pessoal Controle de um veículo elétrico
4 Objetivos do trabalho Disponibilizar a estrutura de adaptação do veículo; Desenvolver um software responsável pela tração e direção do veículo; Calibrar o movimento esperado com o realizado; Efetuar o controle em tempo real; Disponibilizar uma lista documentada com os comandos automatizados para o veículo.
5 Fundamentação teórica
6 Sistemas embarcados Propósitos específicos Parte de uma máquina ou sistema Informações internas e externas Exemplo em veículos freios ABS
7 Automação e controle Sistema: relação entre entradas e saídas Controle da variável de saída Malha fechada e realimentação Controlador Leis de controle (P, I, D)
8 Delcom Driver USB Microcontrolador pré-programado Manual de instruções e biblioteca.dll Utilização da API JNA

9 Sensores Elemento de medida Muda de estado Chave óptica Encoder
10 PWM Motores elétricos de corrente contínua Velocidade proporcional a tensão Circuito digital: 0 e 1 Modulação por largura de pulso
11 Trabalhos correlatos Auto estacionamento - Toyota Prius Módulo inteligente - Heinen Line tracking - Estevam
12 Desenvolvimento do trabalho
13 Requisitos principais Controle da direção em malha fechada (RF) Controle da velocidade em malha fechada (RF) Monitorar a distância percorrida (RF) Monitorar a velocidade em tempo real (RF) Ser implementado em Java utilizando o ambiente Eclipse (RNF)
14 Especificação Comandos para o movimento do veículo Veiculo elétrico infantil Dispositivos USB


15 Adaptação do veículo
16 Diagrama de classes class Classes Dispositivo Controle UsbIO - nom e: String - husb: Pointer - num Serial: int - versaofirm ware: byte - datafirm ware: String - m ajorcm d: byte - m inorcm d: byte - datalsb: byte - datam SB: byte - lenght: short - extdata: byte[] + close() : void + setpwm () : void + setpwm m otor1() : void + setpwm m otor2() : void + ligam otor1() : void + ligam otor2() : void + desligam otor1() : void + desligam otor2() : void + direitam otor1() : void + direitam otor2() : void + esquerdam otor1() : void + esquerdam otor2() : void + selecionasensor() : void + lesensor() : void + zerardispositivo() : void dispt racao: Dispositivo - dispdirecao: Dispositivo - roda: double - furosencoder: int - tem poamostragem : int - distanciapercorrida: double - parar: boolean - velocidadereal: double - anguloatual: double - distanciadesejada: double - velocidadedesejada: double - angulodesejado: double - distanciat otal: double - velocidadem ax: double - velocidadem in: double - em Movim ento: boolean + sentidoavanco() : void + sentidorecuo() : void + calcdistanciaam ostragem () : void + calcparar() : void + pararveiculo() : void + zerarsensores() : void + calcvelocidadereal() : void + calccontrole() : void + inclinaesquerda() : void + inclinadireita() : void + reiniciadirecao() : void + calcdirecao() : void + encerrar() : void + calcparardirecao() : void lib: InterfaceDelcom DLL - devicenam esarray: DeviceNameStruct + inidevice() : int + getdevicenam e() : String + opendevice() : Pointer + closedevice() : void + getserialnum () : int + getfirm wareversion() : byte + getfirm waredate() : String + sendpacket() : void InterfaceDelcomDLL DeviceNameStruct PacketStruct
17 Diagrama de sequência sd Sequencia Interface Controle Dispositivo UsbIO InterfaceDelcom DLL Usuário ou software Liga o carro() iniciacontrole() iniciausbio() iniciadispdirecao() iniciadispt racao() loop Seleciona sentido() sentidoavanco() disptracao.direitam 1() sendpacket() sendpacket() disptracao.direitam 2() sendpacket() sendpacket() Digita velocidade desejada() setvelocidadedesejada() Digita distancia desejada() setdistanciadesejada() Digita inclinacao desejada()
18 Implementação Enterprise Architect Protel99 Ferramenta Eclipse 3.2 (Java) Biblioteca DelcomDLL.dll APIs: JNA vs JNI
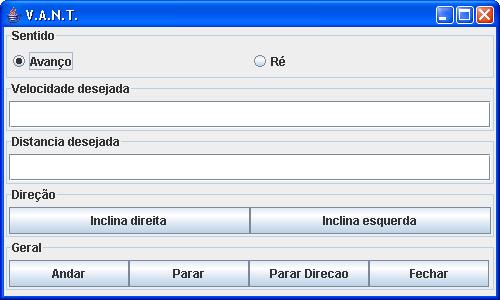
19 Operacionalidade
20 Resultados Testes de deslocamento Testes de carga/peso Implementação das leis de controle Comparação através dos gráficos
21 Resultados Kp 0,5 Kp 1 Kp 2
22 Resultados P PD PI PID
23 Conclusões Ferramentas utilizadas foram adequadas Motores diferentes Alimentação elétrica Técnicas de controle e estabilidade Limitação da direção
24 Extensões Aprimorar o mecanismo, permitindo o controle da direção Sensores para detecção de obstáculos Auto-estacionamento Reconhecimento de rota usando um gps
CONTROLE DE TRÁFEGO FERROVIÁRIO UTILIZANDO MICROCONTROLADOR PIC16F628A
 UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIAS DA COMPUTAÇÃO CONTROLE DE TRÁFEGO FERROVIÁRIO UTILIZANDO MICROCONTROLADOR PIC16F628A Acadêmico: Andrey Starke Sardo
UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIAS DA COMPUTAÇÃO CONTROLE DE TRÁFEGO FERROVIÁRIO UTILIZANDO MICROCONTROLADOR PIC16F628A Acadêmico: Andrey Starke Sardo
PROTÓTIPO DE SISTEMA DE CAPTURA DE DADOS MULTIPONTO WIRELESS PARA CONTROLE DE CONSUMO DE ÁGUA
 PROTÓTIPO DE SISTEMA DE CAPTURA DE DADOS MULTIPONTO WIRELESS PARA CONTROLE DE CONSUMO DE ÁGUA Acadêmico: Benno Martim Schubert Orientador: Miguel Alexandre Wisintainer ROTEIRO Introdução Objetivos do trabalho
PROTÓTIPO DE SISTEMA DE CAPTURA DE DADOS MULTIPONTO WIRELESS PARA CONTROLE DE CONSUMO DE ÁGUA Acadêmico: Benno Martim Schubert Orientador: Miguel Alexandre Wisintainer ROTEIRO Introdução Objetivos do trabalho
8º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA Cusco, 23 a 25 de Outubro de 2007
 8º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA Cusco, 23 a 25 de Outubro de 2007 SISTEMA DIGITAL DE CONTROLE DE UMA MESA DE POSICIONAMENTO D.I. Lasmar*, G.A. Rossi*, A.A.T. Maia*, J.M. Galvez* *Universidade
8º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA Cusco, 23 a 25 de Outubro de 2007 SISTEMA DIGITAL DE CONTROLE DE UMA MESA DE POSICIONAMENTO D.I. Lasmar*, G.A. Rossi*, A.A.T. Maia*, J.M. Galvez* *Universidade
Arduino. Aula 3 motores
 Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
Arduino Aula 3 motores O que são motores elétricos? São dispositivos capazes de converter energia elétrica em energia mecânica No Arduino : Entradas e saídas digitais Entradas analógicas Lembrete!!! Ondas
OBD-JRP Monitoramento Veicular com Java e Raspberry Pi. Ricardo Artur Staroski Miguel Alexandre Wisintainer
 OBD-JRP Monitoramento Veicular com Java e Raspberry Pi Aluno: Orientador: Ricardo Artur Staroski Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação teórica Trabalhos correlatos Requisitos
OBD-JRP Monitoramento Veicular com Java e Raspberry Pi Aluno: Orientador: Ricardo Artur Staroski Miguel Alexandre Wisintainer Roteiro Introdução Objetivos Fundamentação teórica Trabalhos correlatos Requisitos
ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino. Aluna: Juliana Carolina Batista Orientadora: Joyce Martins
 ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino Aluna: Juliana Carolina Batista Orientadora: Joyce Martins Roteiro Introdução Objetivo Geral Objetivos Específicos Fundamentação
ROBOTOY: ferramenta para ensino de programação para crianças usando robôs Arduino Aluna: Juliana Carolina Batista Orientadora: Joyce Martins Roteiro Introdução Objetivo Geral Objetivos Específicos Fundamentação
Kit didático para controle de velocidade e posição de um motor de corrente contínua
 https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
https://eventos.utfpr.edu.br//sicite/sicite2017/index Kit didático para controle de velocidade e posição de um motor de corrente contínua RESUMO Marcos Antonio Ribeiro da Silva marcossilva.2014@alunos.utfpr.edu.br
KIT DIDÁTICO PIC-2377
 KIT DIDÁTICO PIC-77... Módulo PIC-77 Recursos internos da MCU Encapsulamento DIP40. 5 instruções (RISC). pinos de I/O configuráveis. 56 bytes de EEPROM para dados de 8 bits. 8k de memória flash para o
KIT DIDÁTICO PIC-77... Módulo PIC-77 Recursos internos da MCU Encapsulamento DIP40. 5 instruções (RISC). pinos de I/O configuráveis. 56 bytes de EEPROM para dados de 8 bits. 8k de memória flash para o
ANÁLISE DE DADOS DE LINHA DE PRODUÇÃO
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO ANÁLISE DE DADOS DE LINHA DE PRODUÇÃO Allan Marcel Ehrat Prof. Miguel Alexandre Wisintainer, Orientador ROTEIRO DA APRESENTAÇÃO 1.Introdução
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO ANÁLISE DE DADOS DE LINHA DE PRODUÇÃO Allan Marcel Ehrat Prof. Miguel Alexandre Wisintainer, Orientador ROTEIRO DA APRESENTAÇÃO 1.Introdução
Estudo de alternativas tecnológicas
 Estudo de alternativas tecnológicas Oficinas de Integração 3-2º. Sem. 2011 Prof. Heitor S. Lopes Prof. João A. Fabro Funções do engenheiro Entender o problema para poder determinar os requisitos necessários
Estudo de alternativas tecnológicas Oficinas de Integração 3-2º. Sem. 2011 Prof. Heitor S. Lopes Prof. João A. Fabro Funções do engenheiro Entender o problema para poder determinar os requisitos necessários
Desenvolvendo aplicações com LabVIEW FPGA. Rogério Rodrigues Engenheiro de Marketing Técnico Marcos Cardoso Engenheiro de Vendas
 Desenvolvendo aplicações com LabVIEW FPGA Rogério Rodrigues Engenheiro de Marketing Técnico Marcos Cardoso Engenheiro de Vendas Agenda O que são FPGAs e por que eles são úteis? Programando FPGAs Hardware
Desenvolvendo aplicações com LabVIEW FPGA Rogério Rodrigues Engenheiro de Marketing Técnico Marcos Cardoso Engenheiro de Vendas Agenda O que são FPGAs e por que eles são úteis? Programando FPGAs Hardware
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Projeto de sistema de controle digital PID com Arduino Prof. Dr. Marcos Lajovic Carneiro Referência: Ivan Seidel https://www.youtube.com/watch?v=txftr4tqkya
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Projeto de sistema de controle digital PID com Arduino Prof. Dr. Marcos Lajovic Carneiro Referência: Ivan Seidel https://www.youtube.com/watch?v=txftr4tqkya
Introdução à Plataforma ARDUINO
 MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
MINICURSO Introdução à Plataforma ARDUINO PET Mecatrônica/BSI Geruza M. Bressan O que é um microcontrolador (MCU)? É um computador em um chip Processador Memória Entrada/Saída Controla ações e funções
CONTROLE DE TRAÇÃO E DIREÇÃO DE UM VEÍCULO AUTÔNOMO NÃO TRIPULADO
 UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIAS DA COMPUTAÇÃO BACHARELADO CONTROLE DE TRAÇÃO E DIREÇÃO DE UM VEÍCULO AUTÔNOMO NÃO TRIPULADO CARLA REAL AMORIM CARDOSO
UNIVERSIDADE REGIONAL DE BLUMENAU CENTRO DE CIÊNCIAS EXATAS E NATURAIS CURSO DE CIÊNCIAS DA COMPUTAÇÃO BACHARELADO CONTROLE DE TRAÇÃO E DIREÇÃO DE UM VEÍCULO AUTÔNOMO NÃO TRIPULADO CARLA REAL AMORIM CARDOSO
CIDADÃO FISCAL: APLICATIVO PARA A ABERTURA E ACOMPANHAMENTO DE PROCESSOS NO SETOR DE OUVIDORIA DA PREFEITURA MUNICIPAL DE BLUMENAU
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO CIDADÃO FISCAL: APLICATIVO PARA A ABERTURA E ACOMPANHAMENTO DE PROCESSOS NO SETOR DE OUVIDORIA DA PREFEITURA MUNICIPAL DE
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO CIDADÃO FISCAL: APLICATIVO PARA A ABERTURA E ACOMPANHAMENTO DE PROCESSOS NO SETOR DE OUVIDORIA DA PREFEITURA MUNICIPAL DE
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente
 Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Desenvolvimento de um Protótipo e de Metodologias de Controlo de uma Cadeira de Rodas Inteligente Discente: Marcelo Roberto Petry Orientador: Professor Doutor Luís Paulo Reis Co-orientador: Mestre Rodrigo
Sumário. Introdução Objetivos Fundamentação Teórica. Resultados Conclusões e Extensões. Trabalhos correlatos Desenvolvimento Implementação 02/12/2010
 Acadêmica: Gabriele Jennrich Orientador: Miguel Alexandre Wisintainer Sumário Introdução Objetivos Fundamentação Teórica Trabalhos correlatos Desenvolvimento Implementação Resultados Conclusões e Extensões
Acadêmica: Gabriele Jennrich Orientador: Miguel Alexandre Wisintainer Sumário Introdução Objetivos Fundamentação Teórica Trabalhos correlatos Desenvolvimento Implementação Resultados Conclusões e Extensões
Simulação do controle de tráfego de automóveis em uma malha rodoviária urbana: Versão 3.0
 Trabalho de Conclusão de Curso Simulação do controle de tráfego de automóveis em uma malha rodoviária urbana: Versão 3.0 Ederson André Savi Orientador: José Roque Voltolini da Silva Roteiro Introdução
Trabalho de Conclusão de Curso Simulação do controle de tráfego de automóveis em uma malha rodoviária urbana: Versão 3.0 Ederson André Savi Orientador: José Roque Voltolini da Silva Roteiro Introdução
Sistema Experimental. Figura 40: Robô original de onde foram aproveitadas a base da estrutura de alumínio, motores, rodas e eletrônica de potência.
 73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
73 5 Sistema Experimental O transportador robótico aproveitou a estrutura e motores de um robô móvel préexistente no Laboratório de Robótica, vide Figura 40. Foram aproveitados principalmente a estrutura
TECNOLOGIA EDUCACIONAL
 TECNOLOGIA EDUCACIONAL CONJUNTO PARA ESTUDO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS E IHM Características Gerais Composto por hardware, software e sistema de aprendizagem tecnológica de sistemas automatizados
TECNOLOGIA EDUCACIONAL CONJUNTO PARA ESTUDO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS E IHM Características Gerais Composto por hardware, software e sistema de aprendizagem tecnológica de sistemas automatizados
Montagem do Robô. Especificações. domingo, 28 de agosto de 11
 Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Montagem do Robô Especificações Componentes São necessários para o robô funcionar alguns componentes básicos: Bateria 9V Regulador L7805 Motor DC 1 4 Diodos 1N4004 Motor DC 2 4 Diodos 1N4004 Ponte H L298N
Protótipo de gravador de microcontroladores PIC utilizando redes sem fio
 Protótipo de gravador de microcontroladores PIC utilizando redes sem fio Acadêmico: Jair de Souza Junior Orientador: Miguel Alexandre Wisintainer Roteiro da Apresentação Introdução Sistemas embarcados
Protótipo de gravador de microcontroladores PIC utilizando redes sem fio Acadêmico: Jair de Souza Junior Orientador: Miguel Alexandre Wisintainer Roteiro da Apresentação Introdução Sistemas embarcados
FURBUP: UM PROCESSO DE SOFTWARE PARA USO ACADÊMICO BASEADO NO OPENUP. Acadêmico: João Paulo Pedri Orientador: Everaldo Artur Grahl
 Roteiro da Apresentação Introdução; Objetivos; Conceitos Básicos; Disciplinas de Engenharia de Software Currículo 2007/1; Trabalhos Correlatos; Tradução do Processo OpenUP; Elaboração e Publicação do FurbUP;
Roteiro da Apresentação Introdução; Objetivos; Conceitos Básicos; Disciplinas de Engenharia de Software Currículo 2007/1; Trabalhos Correlatos; Tradução do Processo OpenUP; Elaboração e Publicação do FurbUP;
Microcontroladores e Robótica
 Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
Ciência da Computação Sistemas Microcontrolados Projetos Prof. Sergio F. Ribeiro Projetos É preciso estabelecer três equipes. Cada equipe ficará com o desenvolvimento de um projeto. Os projetos são distintos.
A Modernização definitiva à sua disposição
 CO Miconic BX VVVF A Modernização definitiva à sua disposição A solução mais completa do mercado Os elevadores projetados há alguns anos não contavam com dispositivos para evitar a formação de degraus,
CO Miconic BX VVVF A Modernização definitiva à sua disposição A solução mais completa do mercado Os elevadores projetados há alguns anos não contavam com dispositivos para evitar a formação de degraus,
PIBIC/PIBITI/IC Jr Relatório das Atividades de Pesquisa 23ª SEMIC
 ATIVIDADES EXECUTADAS PELO BOLSISTA / VOLUNTÁRIO DADOS DE IDENTIFICAÇÃO: Do bolsista: Nome: Carlos Vinícius Machado Caldeira Curso: Engenharia Elétrica com ênfase em Sistemas Eletrônicos Período de vigência
ATIVIDADES EXECUTADAS PELO BOLSISTA / VOLUNTÁRIO DADOS DE IDENTIFICAÇÃO: Do bolsista: Nome: Carlos Vinícius Machado Caldeira Curso: Engenharia Elétrica com ênfase em Sistemas Eletrônicos Período de vigência
Conceitos Básicos de Automação. Prof. Jeferson L. Curzel 2019/01
 Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2019/01 Exemplo Motivador Furação manual: operador usava os olhos, o tato e a contração dos músculos avaliava a evolução do furo na madeira, decidindo
Conceitos Básicos de Automação Prof. Jeferson L. Curzel 2019/01 Exemplo Motivador Furação manual: operador usava os olhos, o tato e a contração dos músculos avaliava a evolução do furo na madeira, decidindo
Pequenos Projetos com Arduino
 Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Pequenos Projetos com Arduino Jener Toscano
Governo do Estado de Pernambuco Secretaria de Educação Secretaria Executiva de Educação Profissional Escola Técnica Estadual Professor Agamemnon Magalhães ETEPAM Pequenos Projetos com Arduino Jener Toscano
LÓGICA DE PROGRAMAÇÃO (JAVA) CLASSES E OBJETOS. Professor Carlos Muniz
 CLASSES E OBJETOS. Professor Carlos Muniz") LÓGICA DE PROGRAMAÇÃO (JAVA) Classes Uma classe é um tipo definido pelo usuário que contém o molde, a especificação para os objetos, algo mais ou menos como o tipo inteiro contém o molde para as variáveis
LÓGICA DE PROGRAMAÇÃO (JAVA) Classes Uma classe é um tipo definido pelo usuário que contém o molde, a especificação para os objetos, algo mais ou menos como o tipo inteiro contém o molde para as variáveis
Motor DC. Acionamento de Motor DC. Motor DC. Acionamento de Motor DC. Acionamento de Motor DC. Construção. Funcionamento. Sinais de controle do L298
 PMR2415 Microprocessadores em Automação e Robótica Acionamento de motores Construção Motor DC Jun Okamoto Jr. Funcionamento Motor DC Acionamento de Motor DC Acionamento por Ponte H A B C D State A B C
PMR2415 Microprocessadores em Automação e Robótica Acionamento de motores Construção Motor DC Jun Okamoto Jr. Funcionamento Motor DC Acionamento de Motor DC Acionamento por Ponte H A B C D State A B C
FACULDADE LEÃO SAMPAIO
 FACULDADE LEÃO SAMPAIO Sistemas analógicos e digitais Curso de Análise e Desenvolvimento de Sistemas 1 Analógico x Digital Sinal analógico: O sinal analógico varia continuamente ao longo de uma faixa de
FACULDADE LEÃO SAMPAIO Sistemas analógicos e digitais Curso de Análise e Desenvolvimento de Sistemas 1 Analógico x Digital Sinal analógico: O sinal analógico varia continuamente ao longo de uma faixa de
CARACTERÍSTICAS principais
 Os sensores tornaram-se peças fundamentais à Automação Industrial. Sensores e transdutores destacam-se como importantes componentes que fazem a interface de um sistema automatizado com o ambiente externo.
Os sensores tornaram-se peças fundamentais à Automação Industrial. Sensores e transdutores destacam-se como importantes componentes que fazem a interface de um sistema automatizado com o ambiente externo.
Automação Industrial PEA-2211: INTRODUÇÃO À ELETROMECÂNICA E À AUTOMAÇÃO AUTOMAÇÃO: CONTROLADOR LÓGICO PROGRAMÁVEL
 PEA-2211: INTRODUÇÃO À ELETROMECÂNICA E À AUTOMAÇÃO AUTOMAÇÃO: CONTROLADOR LÓGICO PROGRAMÁVEL Histórico Fim da década de 1960: os circuitos integrados permitiram o desenvolvimento de minicomputadores,
PEA-2211: INTRODUÇÃO À ELETROMECÂNICA E À AUTOMAÇÃO AUTOMAÇÃO: CONTROLADOR LÓGICO PROGRAMÁVEL Histórico Fim da década de 1960: os circuitos integrados permitiram o desenvolvimento de minicomputadores,
RESULUÇÃO DOS EXERCÍCIOS E INSTRUÇÕES DE DECISÃO (if{} e else{}) Profº André Aparecido da Silva Disponível em:
 Profº André Aparecido da Silva Disponível em:") RESULUÇÃO DOS EXERCÍCIOS E INSTRUÇÕES DE DECISÃO (if{} e else{}) Profº André Aparecido da Silva Disponível em: http://www.oxnar.com.br/aulas/java ATIVIDADE ELABORAR O PROGRAMA DE CÁLCULOS DE ÁREAS USANDO
RESULUÇÃO DOS EXERCÍCIOS E INSTRUÇÕES DE DECISÃO (if{} e else{}) Profº André Aparecido da Silva Disponível em: http://www.oxnar.com.br/aulas/java ATIVIDADE ELABORAR O PROGRAMA DE CÁLCULOS DE ÁREAS USANDO
SISTEMA PARA AUTOMATIZAÇÃO RESIDENCIAL CONTROLADO POR
 SISTEMA PARA AUTOMATIZAÇÃO RESIDENCIAL CONTROLADO POR COMANDO DE VOZ Ronaldo Rother Prof. Francisco Adell Péricas, Orientador Roteiro da Apresentação 1. Introdução e Objetivos 2. Fundamentação teórica
SISTEMA PARA AUTOMATIZAÇÃO RESIDENCIAL CONTROLADO POR COMANDO DE VOZ Ronaldo Rother Prof. Francisco Adell Péricas, Orientador Roteiro da Apresentação 1. Introdução e Objetivos 2. Fundamentação teórica
GERENCIAMENTO DE PROJETOS - 20h - EaD
 GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
GERENCIAMENTO DE PROJETOS - 20h - EaD Apresentação de gerência de projetos; metodologia de gerência de projetos - ciclo da vida da gestão de projetos; análise de riscos e medidas gerenciais derivadas;
Laboratório de controle 2018/1. Professores: Adolfo Bauchspiess ENE/UnB Lélio R. Soares Júnior ENE/UnB
 Laboratório de controle 2018/1 Professores: Adolfo Bauchspiess ENE/UnB Lélio R. Soares Júnior ENE/UnB Kit impressora (Carro sobre eixo) Desenvolvido pelo Professor: Marco Antônio do Egito Coelho - ENE/UnB
Laboratório de controle 2018/1 Professores: Adolfo Bauchspiess ENE/UnB Lélio R. Soares Júnior ENE/UnB Kit impressora (Carro sobre eixo) Desenvolvido pelo Professor: Marco Antônio do Egito Coelho - ENE/UnB
Curso de Tecnologia em Sistemas Eletrônicos MATRIZ CURRICULAR. Módulo I /Semestre 1 Carga horária total: 400h
 Curso de Tecnologia em Sistemas Eletrônicos CÂMPUS FLORIANÓPOLIS MATRIZ CURRICULAR Módulo I /Semestre 1 Carga horária total: 400h Circuitos Elétricos 1 80 Lógica Combinacional 80 Física Geral 80 Comunicação
Curso de Tecnologia em Sistemas Eletrônicos CÂMPUS FLORIANÓPOLIS MATRIZ CURRICULAR Módulo I /Semestre 1 Carga horária total: 400h Circuitos Elétricos 1 80 Lógica Combinacional 80 Física Geral 80 Comunicação
Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW
 Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW "Este artigo tem como proposta apresentar uma plataforma para monitoramento
Proposta de uma plataforma de monitoramento e acionamento remoto voltada para sistemas de hardware industriais utilizando LabVIEW "Este artigo tem como proposta apresentar uma plataforma para monitoramento
RECONHECIMENTO FACIAL 2D
 RECONHECIMENTO FACIAL 2D PARA SISTEMAS DE AUTENTICAÇÃO EM DISPOSITIVOS MÓVEIS Luciano Pamplona Sobrinho Orientador: Paulo César Rodacki Gomes ROTEIRO Introdução Objetivos Fundamentação Teórica Conceitos
RECONHECIMENTO FACIAL 2D PARA SISTEMAS DE AUTENTICAÇÃO EM DISPOSITIVOS MÓVEIS Luciano Pamplona Sobrinho Orientador: Paulo César Rodacki Gomes ROTEIRO Introdução Objetivos Fundamentação Teórica Conceitos
SISTEMA CNC APLICADO À CARACTERIZAÇÃO DE ACOPLAMENTO INDUTIVO
 SISTEMA CNC APLICADO À CARACTERIZAÇÃO DE ACOPLAMENTO INDUTIVO Gabriel Manoel da Silva Orientador: Prof. Dr. Fernando Rangel de Sousa Universidade Federal de Santa Catarina 25 de Março de 2015 Sumário 1.
SISTEMA CNC APLICADO À CARACTERIZAÇÃO DE ACOPLAMENTO INDUTIVO Gabriel Manoel da Silva Orientador: Prof. Dr. Fernando Rangel de Sousa Universidade Federal de Santa Catarina 25 de Março de 2015 Sumário 1.
SISTEMA DISTRIBUÍDO PARA GERENCIAMENTO DE LIBERAÇÃO DE RELEASES DE SOFTWARE
 SISTEMA DISTRIBUÍDO PARA GERENCIAMENTO DE LIBERAÇÃO DE RELEASES DE SOFTWARE 12/2013 Acadêmico: Rogério Mello Vanti Orientador: Paulo Fernando da Silva Roteiro Introdução Fundamentação teórica Resultados
SISTEMA DISTRIBUÍDO PARA GERENCIAMENTO DE LIBERAÇÃO DE RELEASES DE SOFTWARE 12/2013 Acadêmico: Rogério Mello Vanti Orientador: Paulo Fernando da Silva Roteiro Introdução Fundamentação teórica Resultados
Gustav Dallmann Júnior
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO 5 SISTEMA DE FORÇA DE VENDAS. Gustav Dallmann Júnior Orientador: Prof. Francisco Adell Péricas ROTEIRO DA APRESENTAÇÃO 1. Introdução e
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO 5 SISTEMA DE FORÇA DE VENDAS. Gustav Dallmann Júnior Orientador: Prof. Francisco Adell Péricas ROTEIRO DA APRESENTAÇÃO 1. Introdução e
Trabalho Prático Nº8 Aplicação USB
 Trabalho Prático Nº8 Aplicação USB 1. OBJECTIVOS Saber implementar uma aplicação completa USB entre o dispositivo e o HOST Saber utilizar e configurar o módulo FTDI DLP-USB245M Figura 8.1 Módulo DLP-USB245M.
Trabalho Prático Nº8 Aplicação USB 1. OBJECTIVOS Saber implementar uma aplicação completa USB entre o dispositivo e o HOST Saber utilizar e configurar o módulo FTDI DLP-USB245M Figura 8.1 Módulo DLP-USB245M.
Ferramenta para criaçã. ção o e execuçã
 Ferramenta para criaçã o e execuçã o visual de algoritmos em grafos Susan Braun Paulo César Rodacki Gomes Orientador Roteiro da apresentaçã Introdu Objetivos do trabalho Fundamenta teórica Principais conceitos
Ferramenta para criaçã o e execuçã o visual de algoritmos em grafos Susan Braun Paulo César Rodacki Gomes Orientador Roteiro da apresentaçã Introdu Objetivos do trabalho Fundamenta teórica Principais conceitos
Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC
 Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC Ederson Costa dos Santos 1, Leandro Barjonas da Cruz Rodrigues 1, André Maurício Damasceno Ferreira 2 1
Implementação de controlador PID fuzzy para otimização do controle de posição de um servomotor DC Ederson Costa dos Santos 1, Leandro Barjonas da Cruz Rodrigues 1, André Maurício Damasceno Ferreira 2 1
PROCESSAMENTO DIRIGIDO DE ROTAS ATRAVÉS DE TEXTO-FALA
 PROCESSAMENTO DIRIGIDO DE ROTAS ATRAVÉS DE TEXTO-FALA Adriano Flach de Araújo Profa. Joyce Martins, Mestre Orientadora FURB 2012/1 Roteiro Introdução Objetivos Fundamentação teórica Desenvolvimento do
PROCESSAMENTO DIRIGIDO DE ROTAS ATRAVÉS DE TEXTO-FALA Adriano Flach de Araújo Profa. Joyce Martins, Mestre Orientadora FURB 2012/1 Roteiro Introdução Objetivos Fundamentação teórica Desenvolvimento do
Data: 28/05/2010 8h as 12h. IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
Controlador de direção eletroassistida
 Controladores de motores Modelo 1222 www.curtisinstruments.com 1 O Modelo 1222 da Curtis é um controlador de motor de indução CA para sistemas de direção assistida elétrica steer by wire (direção eletrônica).
Controladores de motores Modelo 1222 www.curtisinstruments.com 1 O Modelo 1222 da Curtis é um controlador de motor de indução CA para sistemas de direção assistida elétrica steer by wire (direção eletrônica).
IP addresses and the port numbers of the components.
 CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
CURSO DE PROGRAMAÇÃO DE ROBÔS MÓVEIS USP - ICMC LRM: Laboratório de Robótica Móvel Profs. Denis Wolf, Eduardo Simões, Fernando Osório Alunos PG - Alberto Hata, Gustavo Pessin, Patrick Shinzato, Maurício
EXERCÍCIOS 2 Prof. Adilson Gonzaga
 LISTA DE EXERCÍCIOS 2 Prof. Adilson Gonzaga 1) Um robô como mostrado na figura é acionado por dois motores de corrente contínua, um para cada roda, conforme o esquema, e possui um sensor localizado na
LISTA DE EXERCÍCIOS 2 Prof. Adilson Gonzaga 1) Um robô como mostrado na figura é acionado por dois motores de corrente contínua, um para cada roda, conforme o esquema, e possui um sensor localizado na
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes
 Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
Sistema de Controle Um sistema de controle é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado. O software
FURB Universidade Regional de Blumenau TCC -Trabalho de Conclusão de Curso Curso de Ciências da Computação - Matutino
 Ferramenta para desenvolvimento de padrões de imagem 2D e separação de cores Aluno: Charles Theiss Orientador: Dalton Solando dos Reis FURB Universidade Regional de Blumenau TCC -Trabalho de Conclusão
Ferramenta para desenvolvimento de padrões de imagem 2D e separação de cores Aluno: Charles Theiss Orientador: Dalton Solando dos Reis FURB Universidade Regional de Blumenau TCC -Trabalho de Conclusão
Programação Orientada a Objectos - P. Prata, P. Fazendeiro
 7 Classes Abstractas e Interfaces Classe Abstracta Classe em que pelo menos um dos métodos de instância não é implementado. Exemplo: public abstract class Forma{ public abstract double area(); public abstract
7 Classes Abstractas e Interfaces Classe Abstracta Classe em que pelo menos um dos métodos de instância não é implementado. Exemplo: public abstract class Forma{ public abstract double area(); public abstract
Exemplo de Arquitetura em Camadas. Arquiteturas de Software. Aplicações-fim
 Exemplo de Arquitetura em Camadas Arquiteturas de Software Aplicações-fim Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados
Exemplo de Arquitetura em Camadas Arquiteturas de Software Aplicações-fim Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados
SOFTWARE DE APOIO A GESTÃO DE SOLICITAÇÃO DE MUDANÇAS
 Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Trabalho de Conclusão de Curso Ciências da Computação SOFTWARE DE APOIO A GESTÃO DE SOLICITAÇÃO DE MUDANÇAS AS Acadêmico: Fabricio
Universidade Regional de Blumenau Centro de Ciências Exatas e Naturais Trabalho de Conclusão de Curso Ciências da Computação SOFTWARE DE APOIO A GESTÃO DE SOLICITAÇÃO DE MUDANÇAS AS Acadêmico: Fabricio
FRAMEWORK PARA GERENCIAMENTO E DISPONIBILIZAÇÃO DE INFORMAÇÕES MULTIMÍDIA GEOLOCALIZADAS NA PLATAFORMA ANDROID
 FRAMEWORK PARA GERENCIAMENTO E DISPONIBILIZAÇÃO DE INFORMAÇÕES MULTIMÍDIA GEOLOCALIZADAS NA PLATAFORMA ANDROID Roteiro Introdução Fundamentação teórica Desenvolvimento Conclusões Introdução Plataformas
FRAMEWORK PARA GERENCIAMENTO E DISPONIBILIZAÇÃO DE INFORMAÇÕES MULTIMÍDIA GEOLOCALIZADAS NA PLATAFORMA ANDROID Roteiro Introdução Fundamentação teórica Desenvolvimento Conclusões Introdução Plataformas
Visualizador de imagens 360 graus interativas na plataforma Android. Acadêmico: Jorge Luis Iten Júnior Orientador: Dalton Solano dos Reis
 Visualizador de imagens 360 graus interativas na plataforma Android Acadêmico: Jorge Luis Iten Júnior Orientador: Dalton Solano dos Reis Roteiro Introdução Objetivos Fundamentação Teórica Desenvolvimento
Visualizador de imagens 360 graus interativas na plataforma Android Acadêmico: Jorge Luis Iten Júnior Orientador: Dalton Solano dos Reis Roteiro Introdução Objetivos Fundamentação Teórica Desenvolvimento
Leonardo Zorzo Carbone. Orientador: Adilson Vahldick
 WebCode Componente web para edição de código fonte Leonardo Zorzo Carbone Orientador: Adilson Vahldick Roteiro da Apresentação Introdução Fundamentação Teórica Desenvolvimento Conclusão Extensões Introdução
WebCode Componente web para edição de código fonte Leonardo Zorzo Carbone Orientador: Adilson Vahldick Roteiro da Apresentação Introdução Fundamentação Teórica Desenvolvimento Conclusão Extensões Introdução
Arquiteturas de Software
 Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
Arquiteturas de Software Uma arquitetura de software define os componentes (módulos) que compõem a arquitetura, como estes componentes são estruturados topologicamente (camadas, pipelines, data-centric,
MJ3I- PA - AMBIENTE VIRTUAL 3D PARA VISUALIZAÇÃO DE BRAÇOS ARTICULADOS NO IOS
 MJ3I- PA - AMBIENTE VIRTUAL 3D PARA VISUALIZAÇÃO DE BRAÇOS ARTICULADOS NO IOS Heitor Augusto Schmitt Prof. Dalton S. dos Reis FURB - Universidade Regional de Blumenau DSC - Departamento de Sistemas e Computação
MJ3I- PA - AMBIENTE VIRTUAL 3D PARA VISUALIZAÇÃO DE BRAÇOS ARTICULADOS NO IOS Heitor Augusto Schmitt Prof. Dalton S. dos Reis FURB - Universidade Regional de Blumenau DSC - Departamento de Sistemas e Computação
Fundamentos de Automação. Controlador 01/06/2015. Controladores. Controladores. Controladores. Considerações Iniciais CURSO DE AUTOMAÇÃO INDUSTRIAL
 Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Considerações Iniciais Fundamentos
Ministério da educação - MEC Secretaria de Educação Profissional e Técnica SETEC Instituto Federal de Educação Ciência e Tecnologia do Rio Grande do Sul Campus Rio Grande Considerações Iniciais Fundamentos
Palavras-chave: Controle de temperatura, microcontrolador, sistema didático
 Projeto e Implementação de um Sistema Didático para Controle de Temperatura Ágio Gonçalves de Moraes Felipe 1, Eduardo Teles Ferreira 2, Antonio Alencar Alves 3 1 Professor do Curso de Automação Industrial
Projeto e Implementação de um Sistema Didático para Controle de Temperatura Ágio Gonçalves de Moraes Felipe 1, Eduardo Teles Ferreira 2, Antonio Alencar Alves 3 1 Professor do Curso de Automação Industrial
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL
 DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
DESENVOLVIMENTO DE VEICULOS AUTONOMOS EM ESCALA EM AMBIENTE DE SIMULAÇÃO COMPUTACIONAL Aluno: Renan de Lima Simões Mondego Vilela Orientador: Mauro Speranza Neto Introdução O presente projeto é continuação
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Norma IEC 61131
 Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Norma IEC 61131 Heitor Medeiros Florencio Norma IEC 61131 A norma IEC (International Electrotechnical
Universidade Federal do Rio Grande do Norte Departamento de Engenharia de Computação e Automação CLPs: Norma IEC 61131 Heitor Medeiros Florencio Norma IEC 61131 A norma IEC (International Electrotechnical
MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1
 MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1 Gustavo Cordeiro Dos Santos 2, Luis Fernando Sauthier 3, Manuel Martín Pérez Reimbold 4, Airam Teresa Zago Romcy Sausen 5, Paulo Sérgio Sausen 6. 1
MODELAGEM MATEMÁTICA E SIMULAÇÃO DO MOTOR BRUSHLESS 1 Gustavo Cordeiro Dos Santos 2, Luis Fernando Sauthier 3, Manuel Martín Pérez Reimbold 4, Airam Teresa Zago Romcy Sausen 5, Paulo Sérgio Sausen 6. 1
PROTÓTIPO DE UM CONTROLADOR DE TEMPERATURA BASEADO EM LÓGICA FUZZY UTILIZANDO UM MICRONTROLADOR
 PROTÓTIPO DE UM CONTROLADOR DE TEMPERATURA BASEADO EM LÓGICA FUZZY UTILIZANDO UM MICRONTROLADOR EDUARDO KLAUS BARG ORIENTADOR: MIGUEL ALEXANDRE WISINTAINER ROTEIRO DE APRESENTAÇÃO Introdução Objetivos
PROTÓTIPO DE UM CONTROLADOR DE TEMPERATURA BASEADO EM LÓGICA FUZZY UTILIZANDO UM MICRONTROLADOR EDUARDO KLAUS BARG ORIENTADOR: MIGUEL ALEXANDRE WISINTAINER ROTEIRO DE APRESENTAÇÃO Introdução Objetivos
ANÁLISE COMPARATIVA DE FERRAMENTAS DE DESENVOLVIMENTO DE APLICATIVOS MÓVEIS MULTIPLATAFORMA
 ANÁLISE COMPARATIVA DE FERRAMENTAS DE DESENVOLVIMENTO DE APLICATIVOS MÓVEIS MULTIPLATAFORMA Aluno: Nikson Barth Orientador: Marcel Hugo Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos
ANÁLISE COMPARATIVA DE FERRAMENTAS DE DESENVOLVIMENTO DE APLICATIVOS MÓVEIS MULTIPLATAFORMA Aluno: Nikson Barth Orientador: Marcel Hugo Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos
CONCURSO PÚBLICO DE PROVAS E TÍTULOS EDITAL ESPECÍFICO 087/ CAMPUS SABARÁ
 MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS CAMPUS SABARÁ MG Rodovia MGC 262, km 10, s/n, Sobradinho, Sabará/MG,
MINISTÉRIO DA EDUCAÇÃO SECRETARIA DE EDUCAÇÃO PROFISSIONAL E TECNOLÓGICA INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE MINAS GERAIS CAMPUS SABARÁ MG Rodovia MGC 262, km 10, s/n, Sobradinho, Sabará/MG,
Microcontroladores PROF. ME. HÉLIO ESPERIDIÃO
 Microcontroladores PROF. ME. HÉLIO ESPERIDIÃO Microprocessador É um circuito integrado que contém milhares, ou mesmo milhões, de transistores. Os transistores trabalham juntos para armazenar e manipular
Microcontroladores PROF. ME. HÉLIO ESPERIDIÃO Microprocessador É um circuito integrado que contém milhares, ou mesmo milhões, de transistores. Os transistores trabalham juntos para armazenar e manipular
Arduino Básico: As versatilidades desta plataforma na prática
 Arduino Básico: As versatilidades desta plataforma na prática Apresentação Kleber Rocha Bastos Luan Silva Santana Wellington Assunção Azevedo Graduado em Engenharia de Computação pela FAINOR Graduado em
Arduino Básico: As versatilidades desta plataforma na prática Apresentação Kleber Rocha Bastos Luan Silva Santana Wellington Assunção Azevedo Graduado em Engenharia de Computação pela FAINOR Graduado em
Filipe José Neto Caetano
 Escola Superior de Tecnologia e Gestão Instituto Politecnico da Guarda Tese de Mestrado Sistema de apoio à condução de uma cadeira de rodas elétrica Filipe José Neto Caetano Dezembro de 2011 Sistema de
Escola Superior de Tecnologia e Gestão Instituto Politecnico da Guarda Tese de Mestrado Sistema de apoio à condução de uma cadeira de rodas elétrica Filipe José Neto Caetano Dezembro de 2011 Sistema de
ou
 Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais que auxiliam na implementação de aplicações
Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais que auxiliam na implementação de aplicações
EDITOR DE MALHAS FERROVIÁRIAS EMF
 EDITOR DE MALHAS FERROVIÁRIAS EMF Luiz Ricardo Dias Orientador: José Roque Voltolini da Silva ROTEIRO DE APRESENTAÇÃO ROTEIRO DA APRESENTAÇÃO Introdução Fundamentação teórica Construção dos modelos vetoriais
EDITOR DE MALHAS FERROVIÁRIAS EMF Luiz Ricardo Dias Orientador: José Roque Voltolini da Silva ROTEIRO DE APRESENTAÇÃO ROTEIRO DA APRESENTAÇÃO Introdução Fundamentação teórica Construção dos modelos vetoriais
Automação Servoconversor SCA06 Servomotor SWA. Motores Automação Energia Transmissão & Distribuição Tintas
 Automação Servoconversor SCA06 Servomotor SWA Motores Automação Energia Transmissão & Distribuição Tintas Servoconversor SCA06 ALTA PERFORMANCE NO CONTROLE DE SERVOMOTORES O SCA06 é um servoconversor de
Automação Servoconversor SCA06 Servomotor SWA Motores Automação Energia Transmissão & Distribuição Tintas Servoconversor SCA06 ALTA PERFORMANCE NO CONTROLE DE SERVOMOTORES O SCA06 é um servoconversor de
Agentes e Inteligência Artificial Distribuída
 Agentes e Inteligência Artificial Distribuída Sistema Multi-Agente para automação inteligente de uma casa Dezembro de 2006 Trabalho realizado por: André Lessa (ei02017) - ei02017@fe.up.pt Índice 1. Objectivo...
Agentes e Inteligência Artificial Distribuída Sistema Multi-Agente para automação inteligente de uma casa Dezembro de 2006 Trabalho realizado por: André Lessa (ei02017) - ei02017@fe.up.pt Índice 1. Objectivo...
CARACTERÍSTICAS. Todos os tanques são em Aço Inox e a tubulação em Aço Carbono pintado garantindo uma boa longevidade.
 INTRODUÇÃO E CARACTERÍSTICAS O objetivo da Planta SMAR é demonstrar didaticamente a operação das diversas malhas de controle utilizando os mesmos equipamentos e ferramentas de configuração, em software,
INTRODUÇÃO E CARACTERÍSTICAS O objetivo da Planta SMAR é demonstrar didaticamente a operação das diversas malhas de controle utilizando os mesmos equipamentos e ferramentas de configuração, em software,
Training Box Duo Mini Curso.
 Training Box Duo Mini Curso www.altus.com.br 1 Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais
Training Box Duo Mini Curso www.altus.com.br 1 Suporte Técnico: + 55 51 3589-9500 ou 0800 510 9500 Internet: http://www.altus.com.br E-mail: suporte@altus.com.br No site da Altus você encontra vários tutoriais
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO. Eduardo Cesar Eberle Prof. Wilson Pedro Carli, Orientador
 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO FERRAMENTA PARA PLANEJAMENTO E CONTROLE DE TESTES -SISCONTROLTEST Eduardo Cesar Eberle Prof. Wilson Pedro Carli, Orientador
UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO - BACHARELADO FERRAMENTA PARA PLANEJAMENTO E CONTROLE DE TESTES -SISCONTROLTEST Eduardo Cesar Eberle Prof. Wilson Pedro Carli, Orientador
Periféricos do PIC - Comparadores e UART
 Periféricos do PIC - Comparadores e Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Periféricos do PIC - Comparadores e Objetivos Aprender a utilizar o comparador
Periféricos do PIC - Comparadores e Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Periféricos do PIC - Comparadores e Objetivos Aprender a utilizar o comparador
O ARDUINO. Plataforma de prototipagem eletrônica; Open Source; Formada por duas partes básicas: hardware e software.
 O ARDUINO Plataforma de prototipagem eletrônica; Open Source; Formada por duas partes básicas: hardware e software. O ARDUINO Serial Microcontrolador Alimentação Programando o Arduino Características do
O ARDUINO Plataforma de prototipagem eletrônica; Open Source; Formada por duas partes básicas: hardware e software. O ARDUINO Serial Microcontrolador Alimentação Programando o Arduino Características do
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO.
 Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Por Sergio Genilson Pfleger PLATAFORMA ROBÓTICA GENÉRICA BASEADA EM ARDUINO. PROBLEMÁTICA: Plataforma Robótica que satisfaça requisitos desejados Problema Asimo - Honda SOLUÇÕES Utilizar o que está disponível
Lista de Exercícios 1
 Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS2322 c) Interrupções Lista de Exercícios 1 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Conceitos envolvidos: a) Contadores e Temporizadores b) Interface serial RS2322 c) Interrupções Lista de Exercícios 1 1. Fazer um contador hexadecimal que coloque o valor de contagem na porta P1 em intervalos
Lista de Exercícios 1
 Conceitos envolvidos: a) Memória de Dados (interna e externa) b) Memória de Programa (interna e externa) c) Operações aritméticas e lógicas d) Portas e) Endereçamento a Bit f) Contadores e Temporizadores
Conceitos envolvidos: a) Memória de Dados (interna e externa) b) Memória de Programa (interna e externa) c) Operações aritméticas e lógicas d) Portas e) Endereçamento a Bit f) Contadores e Temporizadores
Aplicações Avançadas de Microprocessadores. Professor: Marco Shawn Meireles Machado
 Aplicações Avançadas de Microprocessadores Professor: Marco Shawn Meireles Machado Iniciação aos sistemas microcontrolados Objetivos da Aula: Descrever os itens que compõem uma CPU; Detalhar a estrutura
Aplicações Avançadas de Microprocessadores Professor: Marco Shawn Meireles Machado Iniciação aos sistemas microcontrolados Objetivos da Aula: Descrever os itens que compõem uma CPU; Detalhar a estrutura
hardware software software computador microcontrolador hardware sensores sistema de controle de malha fechada.
 Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Sistema de Controle O sistema de controle de qualquer robô é realizado por meio de hardware e software. Este sistema processa os sinais de entrada e converte estes sinais em uma ação ao qual foi programado.
Ferramenta para auxílio na análise de impacto e rastreabilidade de requisitos na gestão de mudanças
 Ferramenta para auxílio na análise de impacto e rastreabilidade de requisitos na gestão de mudanças Aluno: José Alberto Zimermann Orientador: Marcel Hugo Banca: Everaldo Artur Grahl Joyce Martins Roteiro
Ferramenta para auxílio na análise de impacto e rastreabilidade de requisitos na gestão de mudanças Aluno: José Alberto Zimermann Orientador: Marcel Hugo Banca: Everaldo Artur Grahl Joyce Martins Roteiro
Retrofitting de Robôs. Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica
 Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica fetter@eletro.ufrgs.br 1 Introdução Robôs Manipuladores Robôs Industriais Móveis
Retrofitting de Robôs Walter Fetter Lages Universidade Federal do Rio Grande do Sul Departamento de Engenharia Elétrica fetter@eletro.ufrgs.br 1 Introdução Robôs Manipuladores Robôs Industriais Móveis
Discentes: Weverton Lima e Juliete Souza Disciplina: Sistemas Embarcados Professor Orientador: Ilton Barbacena
 1. Montagem do Circuito do Dimmer Discentes: Weverton Lima e Juliete Souza Disciplina: Sistemas Embarcados Professor Orientador: Ilton Barbacena O circuito desenvolvido para o controle de luminosidade
1. Montagem do Circuito do Dimmer Discentes: Weverton Lima e Juliete Souza Disciplina: Sistemas Embarcados Professor Orientador: Ilton Barbacena O circuito desenvolvido para o controle de luminosidade
ü Na década de 1920 os dispositivos mecânicos foram substituídos pelos relés; ü O uso da lógica de relés dificultava modificações do processo;
 O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
O que são? CLP - CONTROLADOR LÓGICO PROGRAMÁVEL ü O CLP é um computador industrial, capaz de implementar funções de controle (sequência lógica, contagem e temporização), operações lógicas e aritméticas,
ESTABELECIMENTO DE ROTAS PARA AR.DRONE UTILIZANDO DELPHI XE 10
 ESTABELECIMENTO DE ROTAS PARA AR.DRONE UTILIZANDO DELPHI XE 10 Aluno(a): Rafael Ronaldo Rahn Orientador: Mauro Marcelo Mattos Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos Desenvolvimento
ESTABELECIMENTO DE ROTAS PARA AR.DRONE UTILIZANDO DELPHI XE 10 Aluno(a): Rafael Ronaldo Rahn Orientador: Mauro Marcelo Mattos Roteiro Introdução Objetivos Fundamentação Teórica Trabalhos Correlatos Desenvolvimento
28/05/2017. Interface com Conversores A/D e D/A. Interface com Conversores A/D e D/A SEL-433 APLICAÇÕES DE MICROPROCESSADORES I
 SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Prof.
SEL-433 APLICAÇÕES DE MICROPROCESSADORES I Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Prof.
VISÃO COMPUTACIONAL PARA RECONHECIMENTO DE FACES APLICADO NA IDENTIFICAÇÃO E AUTENTICAÇÃO DE USUÁRIOS NA WEB. Márcio Koch
 VISÃO COMPUTACIONAL PARA RECONHECIMENTO DE FACES APLICADO NA IDENTIFICAÇÃO E AUTENTICAÇÃO DE USUÁRIOS NA WEB Márcio Koch Orientador: Jacques Robert Heckmann ROTEIRO Introdução Objetivos do trabalho Fundamentação
VISÃO COMPUTACIONAL PARA RECONHECIMENTO DE FACES APLICADO NA IDENTIFICAÇÃO E AUTENTICAÇÃO DE USUÁRIOS NA WEB Márcio Koch Orientador: Jacques Robert Heckmann ROTEIRO Introdução Objetivos do trabalho Fundamentação
Benefícios de um CLP:
 Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
Benefícios de um CLP: a) Permitir fácil diagnóstico de funcionamento ainda na fase de projeto do sistema e/ou de reparos em falhas que venham a ocorrer durante a sua operação. b) Ser instalado em cabines
iar 2.0: API o,mizada para aplicações de entretenimento em realidade aumentada na plataforma ios
 iar 2.0: API o,mizada para aplicações de entretenimento em realidade aumentada na plataforma ios Állan Milbratz de Camargo Orientador: Dalton Solano dos Reis FURB Universidade Regional de Blumenau DSC
iar 2.0: API o,mizada para aplicações de entretenimento em realidade aumentada na plataforma ios Állan Milbratz de Camargo Orientador: Dalton Solano dos Reis FURB Universidade Regional de Blumenau DSC
RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO
 ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO A12.1. Considerações Iniciais Inicialmente, é importante destacar que a Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia
ANEXO 12 RECURSOS EXTRAORDINÁRIOS PARA A IMPLANTAÇÃO DO CURSO A12.1. Considerações Iniciais Inicialmente, é importante destacar que a Faculdade de Engenharia Elétrica da Universidade Federal de Uberlândia
ORGANIZAÇÃO CURRICULAR TÉCNICO EM ELETRÔNICA NA MODALIDADE A DISTÂNCIA
 ORGANIZAÇÃO CURRICULAR TÉCNICO EM ELETRÔNICA NA MODALIDADE A DISTÂNCIA DC 4018 09/10/13 Rev. 01 1. Dados Legais Autorizado pelo Parecer 324 de 21/11/2006, Decreto 4.945 Publicado D.O 18.018 de 04/12/2006.
ORGANIZAÇÃO CURRICULAR TÉCNICO EM ELETRÔNICA NA MODALIDADE A DISTÂNCIA DC 4018 09/10/13 Rev. 01 1. Dados Legais Autorizado pelo Parecer 324 de 21/11/2006, Decreto 4.945 Publicado D.O 18.018 de 04/12/2006.
Interface com A/D e D/A
 Interface com A/D e D/A Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Um Microcontrolador/Microprocessador
Interface com A/D e D/A Interface com Conversores A/D e D/A Conversor A/D ADC Converte um Valor Analógico para Digital Conversor D/A DAC Converte um Valor Digital para Analógico Um Microcontrolador/Microprocessador
CONVERSORES DE FREQUÊNCIA
 CONVERSORES DE FREQUÊNCIA Introdução a inversores Convertem tensão c.c. para c.a. simétrica de amplitude e frequência desejadas A forma de onda dos inversores não é senoidal 1 Algumas aplicações dos inversores
CONVERSORES DE FREQUÊNCIA Introdução a inversores Convertem tensão c.c. para c.a. simétrica de amplitude e frequência desejadas A forma de onda dos inversores não é senoidal 1 Algumas aplicações dos inversores
IMPLEMENTAÇÃO DE CONTROLE AUTOMÁTICO PARA O AUTO NIVELAMENTO DE PENEIRAS 1 AUTOMATIC CONTROL IMPLEMENTATION FOR SELF-LEVELING OF SIEVES
 IMPLEMENTAÇÃO DE CONTROLE AUTOMÁTICO PARA O AUTO NIVELAMENTO DE PENEIRAS 1 AUTOMATIC CONTROL IMPLEMENTATION FOR SELF-LEVELING OF SIEVES Felipe Oliveira Bueno 2, Odmartan Ribas Maciel 3, Andrei Fiegenbaum
IMPLEMENTAÇÃO DE CONTROLE AUTOMÁTICO PARA O AUTO NIVELAMENTO DE PENEIRAS 1 AUTOMATIC CONTROL IMPLEMENTATION FOR SELF-LEVELING OF SIEVES Felipe Oliveira Bueno 2, Odmartan Ribas Maciel 3, Andrei Fiegenbaum