Laboratório de Projeto de Avanço e Atraso
|
|
|
- Thais Beretta de Escobar
- 6 Há anos
- Visualizações:
Transcrição
1 Laboratório de Projeto de Avanço e Atraso
2 Revisão
3 Entrada Expressão do erro estacionário Degrau, Rampa, Parábola,
4 Dado o sistema: Exercício 1 - Controlador de Atraso No Matlab projete um compensador P para conseguir um P.O. de 15%. No Matlab projete um compensador de Atraso com p c = 0,01 e erro 20 vezes menor do que o controlador P. Comparar a resposta ao degrau e a rampa, os ganhos K e os erros de estado estacionário.
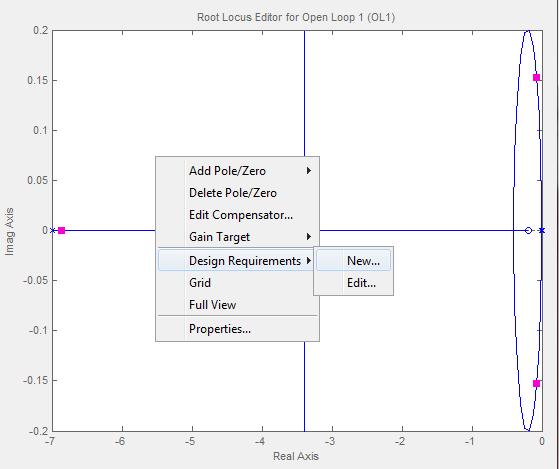
5 Exercício 1 Resposta Sistema não compensado Root Locus >> s = tf('s'); >> gs_desc = 1/(s*(s+7)); >> sys = feedback(gs_desc,1) >> rltool(gs_desc) %sisotool para root locus


6 Exercício 1 Resposta Sistema não compensado Delimitando PO = 15%

7 Exercício 1 Resposta Sistema não compensado s1 = i ζ = 0.51
8 Exercício 1 Resposta Gs () 1 Sistema não compensado Condição de pertencer ao Root Locus s = s1 = i >> s1 = i >> k = abs(s1*(s1+7)) K = K = 46.23
9 Exercício 1 Resposta Sistema não compensado Condição de pertencer ao Root Locus Kv 6.6 (0 7) 1 Erro( ramp) 0,
10 Exercício 1 Resposta Sistema não compensado Resposta a rampa >> gs_desc = 1/(s*(s+7)); >> sys = feedback(46.23*gs_desc,1) 3 >> step(sys/s) %Plota a resposta a rampa 2.5 >> hold on 2 %Congela a figura >> step(1/s) 1.5 % Plota a rampa original Transfer function: s^2 + 7 s Amplitude Step Response Erro = = Time (sec)
11 Exercício 1 Resposta 0,15 Erro _ comp 0, Erro _ comp 0,0075 Kv 1 Kv _ comp (0,0075)
12 Exercício 1 Resposta z p c c kcomp k 6,6 desc Selecionando arbitrariamente: p comp = 0,01 zc 20 zc 0, 2 0,01
13 Exercício 1 Resposta Compensador
*s*(s+7)); >> rltool(gs_comp) %sisotool para root locus Transfer function: s + 0.")
14 Exercício 1 Resposta Root Locus >> gs_comp = (s+0.2)/((s+0.01)*s*(s+7)); >> rltool(gs_comp) %sisotool para root locus Transfer function: s s^ s^ s + 0.2


15 Exercício 1 Resposta Delimitando PO = 15%

16 Exercício 1 Resposta s2 = i
17 Exercício 1 Resposta Condição de pertencer ao Root Locus Gs () 1 s = s2 = i K = 44.6 >> s2 = i >> k_comp = abs(s2*(s2+7)*(s2+0.01)/(s2+0.2)) K_comp = 44.6
18 Exercício 1 Resposta 44.6 (s+0,2) Resposta a rampa >> gs_comp = (s+0.2)/((s+0.01)*s*(s+7)); >> sys_comp = feedback(44.6*gs_comp,1) >> step(sys_comp/s) %Plota a resposta a rampa >> hold on %Congela a figura >> step(1/s) % Plota a rampa original >> step(sys/s) %Plota sistema não compensado >> legend('compensado','rampa', 'não compensado') Transfer function: 1.35 s s^ s^ s
19 Exercício 1 Resposta Resposta a rampa Resposta ideal Step Response Compensado rampa descompensado Compensador ATRASO DE FASE Amplitude Compensador PROPORCIONAL Time (sec)
20 Exercício 2 - Controlador de Avanço Dado o sistema o mesmo sistema do Exercício 1 e mesmo P.O. de 15 %: No Matlab projete um compensador de Avanço com tempo de stabelecimento 3 vezes menor do que o sistema acima. Adote Zc = 10. Comparar a resposta ao degrau e a rampa, os ganhos K e os erros de estado estacionário.

21 Exercício 2 Resposta Usando os dados do exercicio 1: Re =3,5 logo, Te 4 4 1,14 seg. w 3.5 n Te Te' 0.38 seg. 3

22 Exercício 2 Resposta Adiciona-se um zero em -10
23 Exercício 2 Resposta Adiciona-se um polo e muda sua posição até a intercessão com as retas do P.O. e do Te

24 Exercício 2 Resposta S_comp = i P_comp = -25.3
25 Exercício 2 Resposta
26 Exercício 2 Resposta Condição de pertencer ao Root Locus Gs () 1 s = s2 = i K = >> s2 = i >> k_comp = abs(s2*(s2+7)*(s2+25.3)/(s2+10)) K_comp =
27 Exercício 2 Resposta Resposta ao degrau: >> gs = 46.23/(s*(s+7)); >> sys = feedback(gs,1); >> step(sys) >> hold on >> gs_comp = (452.22*(s+10))/(s*(s+7)*(s+25.3)); >> sys_comp = feedback(gs_comp,1); >> step(sys_comp) >> legend('original','compensado')
28 Exercício 2 Resposta Resposta ao degrau: Step Response Original Compensado 1 Amplitude Time (sec)
Laboratório de Projeto por Intermédio do Root Locus
 Laboratório de Projeto por Intermédio do Root Locus Revisão Revisão Entrada Expressão do erro estacionário Degrau, Rampa, Parábola, Dado o sistema: Método do Lugar das Raízes Exercício 1 - Controlador
Laboratório de Projeto por Intermédio do Root Locus Revisão Revisão Entrada Expressão do erro estacionário Degrau, Rampa, Parábola, Dado o sistema: Método do Lugar das Raízes Exercício 1 - Controlador
Projeto de controladores
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 3 de junho de 2014 Apresentação Um dos objetivos do desenvolvimento da teoria de controle é fazer com que os sistemas se comportem
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 3 de junho de 2014 Apresentação Um dos objetivos do desenvolvimento da teoria de controle é fazer com que os sistemas se comportem
Laboratório 5. Carlos Amaral. UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica
 Laboratório 5 Carlos Amaral UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Abril de 2012. Resumo 1 Objetivos 2 3 Atividade 1 - Resposta de
Laboratório 5 Carlos Amaral UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Abril de 2012. Resumo 1 Objetivos 2 3 Atividade 1 - Resposta de
Projeto através de resposta em frequência
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 04 de 2013 Objetivos Refoçar o conceito das características da resposta em frequência Saber utilizar o diagrama para projeto
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 04 de 2013 Objetivos Refoçar o conceito das características da resposta em frequência Saber utilizar o diagrama para projeto
COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com Atraso.
 Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com
Universidade Federal do Rio de Janeiro COPPE Programa de Engenharia Química COQ 790 ANÁLISE DE SISTEMAS DA ENGENHARIA QUÍMICA AULA 9: Dinâmica de Ordem Superior; Efeito de múltiplos zeros; Sistemas com
Aula 12. Cristiano Quevedo Andrea 1. Curitiba, Outubro de DAELT - Departamento Acadêmico de Eletrotécnica
 Aula 12 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro de 2011. Resumo 1 Introdução 2 3 4 5 Podemos melhorar
Aula 12 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro de 2011. Resumo 1 Introdução 2 3 4 5 Podemos melhorar
Teoria do Controlo. Síntese de controladores. Controladores PID MIEEC
 Teoria do Controlo Síntese de controladores Controladores PID MIEEC! Esquema de controlo r - G c (s) G p (s) y TCON 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Controlador com pura ação proporcional
Teoria do Controlo Síntese de controladores Controladores PID MIEEC! Esquema de controlo r - G c (s) G p (s) y TCON 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Controlador com pura ação proporcional
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr.
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr.
Pontifícia Universidade Católica de Goiás Escola de Engenharia. Aluno (a):
:") Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Marcos Lajovic Carneiro 05 Aluno (a): Aula Laboratório 05 Cap 9 Projeto do compensador derivativo ideal (controlador PD) 1- Descrição:
Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Marcos Lajovic Carneiro 05 Aluno (a): Aula Laboratório 05 Cap 9 Projeto do compensador derivativo ideal (controlador PD) 1- Descrição:
PID e Lugar das Raízes
 PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
PID e Lugar das Raízes 1. Controlador PID 2. Minorsky (1922), Directional stability of automatically steered bodies, Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 Pilotagem de navios
Controle por Computador Parte II. 22 de novembro de 2011
 Controle por Computador Parte II 22 de novembro de 2011 Outline 1 Exemplo de Projeto 2 Controladores PID 3 Projeto de Controle em Tempo Discreto Exemplo de Projeto Exemplo de Projeto: Controle de azimute
Controle por Computador Parte II 22 de novembro de 2011 Outline 1 Exemplo de Projeto 2 Controladores PID 3 Projeto de Controle em Tempo Discreto Exemplo de Projeto Exemplo de Projeto: Controle de azimute
2 a PROVA CONTROLE DINÂMICO Turma B 2 /2015
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia É permitido usar calculadora. Universidade de Brasília Prof. Adolfo Bauchspiess Auditório SG11, 21/1/215,
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia É permitido usar calculadora. Universidade de Brasília Prof. Adolfo Bauchspiess Auditório SG11, 21/1/215,
AULA 8 COMPENSAÇÃO POR ATRASO DE FASE. Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I PROF. DR. ALFREDO DEL SOLE LORDELO
 Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 8 COMPENSAÇÃO POR ATRASO DE FASE PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA A configuração do compensador eletrônico por atraso
Universidade Federal do ABC UFABC ESTA003-17: SISTEMAS DE CONTROLE I AULA 8 COMPENSAÇÃO POR ATRASO DE FASE PROF. DR. ALFREDO DEL SOLE LORDELO TELA CHEIA A configuração do compensador eletrônico por atraso
2 a Prova - CONTROLE DINÂMICO - 2 /2018
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
Prova 2 - Sistemas de Controle Projetos
 Prova - Sistemas de Controle Projetos Pedro Batista (887) - pedro@ufpa.br Paulo Victor Mocbel (887) - pvmocbel@gmail.com December 4, Projeto de Controlador PI ideal Desejamos adicionar um controlador proporcional
Prova - Sistemas de Controle Projetos Pedro Batista (887) - pedro@ufpa.br Paulo Victor Mocbel (887) - pvmocbel@gmail.com December 4, Projeto de Controlador PI ideal Desejamos adicionar um controlador proporcional
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA
 CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
CAPÍTULO 4 - ANÁLISE DA RESPOSTA EM FREQÜÊNCIA 4.. Introdução Pelo termo resposta em freqüência, entende-se a resposta em regime estacionário de um sistema com entrada senoidal. Nos métodos de resposta
O método do lugar das raízes - Exemplos
 Capítulo 5 O método do lugar das raízes - Exemplos 5. Introdução Neste capìtulo, apresentamos exemplos de projeto de controladores utilizando o método do lugar das raízes. 5.2 Projeto de controladores
Capítulo 5 O método do lugar das raízes - Exemplos 5. Introdução Neste capìtulo, apresentamos exemplos de projeto de controladores utilizando o método do lugar das raízes. 5.2 Projeto de controladores
Projeto Através do Lugar das Raízes. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Projeto Através do Lugar das Raízes Carlos Alexandre Mello 1 Revisão Primeiro, vamos re-lembrar alguns aspectos de sistemas subamortecidos de segunda ordem: cos = 2 Revisão Sobre a taxa de amortecimento:
Projeto Através do Lugar das Raízes Carlos Alexandre Mello 1 Revisão Primeiro, vamos re-lembrar alguns aspectos de sistemas subamortecidos de segunda ordem: cos = 2 Revisão Sobre a taxa de amortecimento:
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA*
 ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 334 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero roteiro de estudo e não substitui as referências
Melhoramos a resposta temporal associando um compensador de avanço de fase que contribui com
 Compensador por Avanço / Atraso de fase A compensação de avanço / atraso de fase, é a composição das duas técnicas vistas anteriormente em um único compensador. Melhoramos a resposta temporal associando
Compensador por Avanço / Atraso de fase A compensação de avanço / atraso de fase, é a composição das duas técnicas vistas anteriormente em um único compensador. Melhoramos a resposta temporal associando
COMPENSAÇÃO CP s(s+2)(s+8) CP1- Dada a FT em malha aberta G(s) = de um sistema com realimentação
(s+8) CP1- Dada a FT em malha aberta G(s) = de um sistema com realimentação") CP- CP- Dada a FT em malha aberta G(s) = COMPENSAÇÃO s(s+)(s+8) de um sistema com realimentação negativa unitária, compense esse sistema, utilizando métodos de lugar de raízes, de forma que: a) o sistema
CP- CP- Dada a FT em malha aberta G(s) = COMPENSAÇÃO s(s+)(s+8) de um sistema com realimentação negativa unitária, compense esse sistema, utilizando métodos de lugar de raízes, de forma que: a) o sistema
Controle Digital. Prof. Adolfo Bauchspiess ENE/FT/UnB. CDig-ENE/UnB
 Controle Digital Prof. Adolfo Bauchspiess ENE/FT/UnB CDig-ENE/UnB . Introdução -Sistema de Controle Digital CDig-ENE/UnB 2 Conversor A/D -Quantização CDig-ENE/UnB 3 Sistema de Controle Digital -Sinais
Controle Digital Prof. Adolfo Bauchspiess ENE/FT/UnB CDig-ENE/UnB . Introdução -Sistema de Controle Digital CDig-ENE/UnB 2 Conversor A/D -Quantização CDig-ENE/UnB 3 Sistema de Controle Digital -Sinais
CAPÍTULO 7 Projeto usando o Lugar Geométrico das Raízes
 CAPÍTULO 7 Projeto usando o Lugar Geométrico das Raízes 7.1 Introdução Os objetivos do projeto de sistemas de controle foram discutidos no Capítulo 5. No Capítulo 6 foram apresentados métodos rápidos de
CAPÍTULO 7 Projeto usando o Lugar Geométrico das Raízes 7.1 Introdução Os objetivos do projeto de sistemas de controle foram discutidos no Capítulo 5. No Capítulo 6 foram apresentados métodos rápidos de
SC1 Sistemas de Controle 1. Cap. 5 Método do Lugar das Raízes Abordagem de Projetos Prof. Tiago S Vítor
 SC1 Sistemas de Controle 1 Cap. 5 Método do Lugar das Raízes Abordagem de Projetos Prof. Tiago S Vítor Sumário 1. Introdução 2. Definições 3. Alguns detalhes construtivos sobre LR 4. Condições para um
SC1 Sistemas de Controle 1 Cap. 5 Método do Lugar das Raízes Abordagem de Projetos Prof. Tiago S Vítor Sumário 1. Introdução 2. Definições 3. Alguns detalhes construtivos sobre LR 4. Condições para um
Controle de Processos Aula: Ações de Controle
 Aula 7484 Controle de Processos Aula: Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB o Semestre 26 E. S. Tognetti UnB) Controle de processos / Ação proporcional
Aula 7484 Controle de Processos Aula: Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB o Semestre 26 E. S. Tognetti UnB) Controle de processos / Ação proporcional
Erro em regime permanente em sistema de controle com
 Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
Erro em regime permanente em sistema de controle com realimentação unitária 0.1 Introdução Controle 1 Prof. Paulo Roberto Brero de Campos Um dos objetivos de um sistema de controle é que a resposta na
INSTITUTO SUPERIOR TÉCNICO CONTROLO. As questões assinaladas com * serão abordadas na correspondente aula de apoio.
 INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
INSTITUTO SUPERIOR TÉCNICO ENGENHARIA ELECTROTÉCNICA E DE COMPUTADORES CONTROLO 2 a Série (resposta no tempo, diagrama de blocos, erro estático) As questões assinaladas com * serão abordadas na correspondente
Métodos de Resposta em Freqüência
 Métodos de Resposta em Freqüência. Exemplo de projeto: sistema de controle de uma máquina de inscultura 2. MATLAB 3. Exemplo de Projeto Seqüencial: sistema de leitura de um drive 4. Diagramas de Bode de
Métodos de Resposta em Freqüência. Exemplo de projeto: sistema de controle de uma máquina de inscultura 2. MATLAB 3. Exemplo de Projeto Seqüencial: sistema de leitura de um drive 4. Diagramas de Bode de
Métodos de Resposta em Freqüência
 Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
Métodos de Resposta em Freqüência 1. Sistemas de fase mínima 2. Exemplo de traçado do diagrama de Bode 3. Medidas da resposta em freqüência 4. Especificações de desempenho no domínio da freqüência pag.1
Controle de Processos Aula: Atraso no tempo e obtenção de modelos empíricos
 107484 Controle de Processos Aula: Atraso no tempo e obtenção de modelos empíricos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E.
107484 Controle de Processos Aula: Atraso no tempo e obtenção de modelos empíricos Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2016 E.
Resposta em Frequência
 Resposta em Frequência G( s) = s 2 1 +,5s + 1 2 2.5 Nyquist Diagram 2-2 -4-6 -8 Imaginary Axis 1.5 1.5 -.5-9 -1-1.5-2 -18 1-2 1-1 1 1 1 1 2 Frequency (rad/sec) -2.5-1 -.5.5 1 1.5 Real Axis 1 Mapeamento
Resposta em Frequência G( s) = s 2 1 +,5s + 1 2 2.5 Nyquist Diagram 2-2 -4-6 -8 Imaginary Axis 1.5 1.5 -.5-9 -1-1.5-2 -18 1-2 1-1 1 1 1 1 2 Frequency (rad/sec) -2.5-1 -.5.5 1 1.5 Real Axis 1 Mapeamento
CAPÍTULO Compensação via Compensador de Avanço de Fase
 CAPÍTULO 8 Projeto no Domínio da Freqüência 8.1 Introdução Este capítulo aborda o projeto de controladores usando o domínio da freqüência. As caracteristicas de resposta em freqüência dos diversos controladores,
CAPÍTULO 8 Projeto no Domínio da Freqüência 8.1 Introdução Este capítulo aborda o projeto de controladores usando o domínio da freqüência. As caracteristicas de resposta em freqüência dos diversos controladores,
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II
 Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
Roteiro de Laboratório - Experiência 2 Controle de Sistemas e Servomecanismos II Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 3 de novembro de 2012 1
1:9 2 a PROVA CONTROLE DINÂMICO - 1 /2017
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta, Faculdade de Tecnologia Só é permitido/necessário calculadora simples, Universidade de Brasília (operações com números complexos)
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta, Faculdade de Tecnologia Só é permitido/necessário calculadora simples, Universidade de Brasília (operações com números complexos)
Lista de Exercícios 2
 Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Universidade de Brasília Faculdade de Tecnologia Departamento de Engenharia Elétrica 107484 Controle de Processos 1 o Semestre 2018 Prof. Eduardo Stockler Tognetti Lista de Exercícios 2 Para os exercícios
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Aula 6 Redução de diagrama de blocos Prof. Marcio Kimpara
 FUNDAMENTOS DE CONTROLE E AUTOMAÇÃO Aula 6 Redução de diagrama de blocos Prof. Marcio Kimpara Universidade Federal de Mato Grosso do Sul Prof. Marcio Kimpara 2 Sistemas de primeira ordem Existem casos
FUNDAMENTOS DE CONTROLE E AUTOMAÇÃO Aula 6 Redução de diagrama de blocos Prof. Marcio Kimpara Universidade Federal de Mato Grosso do Sul Prof. Marcio Kimpara 2 Sistemas de primeira ordem Existem casos
Objetivos de Controle
 Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
Objetivos de Controle ENGC42: Sistemas de Controle I Departamento de Engenharia Elétrica - DEE Universidade Federal da Bahia - UFBA 13 de janeiro de 2016 Prof. Tito Luís Maia Santos 1/ 30 Sumário 1 Introdução
CARACTERIZAÇÃO DEPROCESSOS
 CARACTERIZAÇÃO DEPROCESSOS ESINTONIA DECONTROLADORES PORMÉTODOSEMPÍRICOS Profa. Cristiane Paim Semestre 2014-2 Caracterização de Processos Considere a configuração série de um sistema de controle: Dado
CARACTERIZAÇÃO DEPROCESSOS ESINTONIA DECONTROLADORES PORMÉTODOSEMPÍRICOS Profa. Cristiane Paim Semestre 2014-2 Caracterização de Processos Considere a configuração série de um sistema de controle: Dado
Projeto a Tempo Discreto
 Projeto a Tempo Discreto 1. Lugar das Raízes no domínio-z 2. Exemplo de projeto Fly-by-Wire pag.1 Controle de Sistemas Lineares Aula 23 Projeto via Lugar das Raízes O projeto é realizado diretamente no
Projeto a Tempo Discreto 1. Lugar das Raízes no domínio-z 2. Exemplo de projeto Fly-by-Wire pag.1 Controle de Sistemas Lineares Aula 23 Projeto via Lugar das Raízes O projeto é realizado diretamente no
Universidade de Brasília CONTROLE DIGITAL - 2 /2010 ENE/FT/UnB Terça-Feira, 14 de dezembro de 2010,
 Departamento de Engenharia Elétrica Prof. Adolfo Bauchspiess Faculdade de Tecnologia http://www.ene.unb.br/adolfo/cdig Universidade de Brasília 64887 CONTROLE DIGITAL - / ENE/FT/UnB Terça-Feira, 4 de dezembro
Departamento de Engenharia Elétrica Prof. Adolfo Bauchspiess Faculdade de Tecnologia http://www.ene.unb.br/adolfo/cdig Universidade de Brasília 64887 CONTROLE DIGITAL - / ENE/FT/UnB Terça-Feira, 4 de dezembro
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr.
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr.
Projeto de Compensadores no Domínio da Frequência
 Projeto de Compensadores no Domínio da Frequência Maio de 214 Loop Shaping I No projeto de compensadores no domínio da frequência, parte-se do pressuposto de que o sistema a ser controlado pode ser representado
Projeto de Compensadores no Domínio da Frequência Maio de 214 Loop Shaping I No projeto de compensadores no domínio da frequência, parte-se do pressuposto de que o sistema a ser controlado pode ser representado
Toolbox de Sistemas de Controle MATLAB
 Toolbox de Sistemas de Controle MATLAB Control System Toolbox Grupo PET Engenharia Elétrica UFMS Campo Grande MS Junho - 2003 2 Índice Índice 3 1. Introdução 4 2. Representação dos Sistemas 5 2.1. Representação
Toolbox de Sistemas de Controle MATLAB Control System Toolbox Grupo PET Engenharia Elétrica UFMS Campo Grande MS Junho - 2003 2 Índice Índice 3 1. Introdução 4 2. Representação dos Sistemas 5 2.1. Representação
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04037 Sistemas de Controle Digitais
 Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04037 Sistemas de Controle Digitais Especificações de Desempenho de Sistemas de Controle Discreto Introdução
Universidade Federal do Rio Grande do Sul Escola de Engenharia Departamento de Engenharia Elétrica ENG04037 Sistemas de Controle Digitais Especificações de Desempenho de Sistemas de Controle Discreto Introdução
Aula 11. Cristiano Quevedo Andrea 1. Curitiba, Outubro de DAELT - Departamento Acadêmico de Eletrotécnica
 Aula 11 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro de 2011. Resumo 1 Introdução - Lugar das Raízes
Aula 11 Cristiano Quevedo Andrea 1 1 UTFPR - Universidade Tecnológica Federal do Paraná DAELT - Departamento Acadêmico de Eletrotécnica Curitiba, Outubro de 2011. Resumo 1 Introdução - Lugar das Raízes
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA
 OGATA") RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
RESPOSTA EM FREQUÊNCIA: CONTROLADOR AVANÇO E ATRASO DE FASE (LEAD-LAG) OGATA CCL Profa. Mariana Cavalca Retirado de OGATA, Katsuhiko. Engenharia de controle moderno. 1. ed. Rio de Janeiro: Prentice Hall,
SISTEMAS REALIMENTADOS
 SISTEMAS REALIMENTADOS Prof.: Helder Roberto de O. Rocha Engenheiro Eletricista Doutorado em Computação Projeto de Sistemas de Controle pelo LDR Consiste em inserir pólos e zeros, na forma de um compensador,
SISTEMAS REALIMENTADOS Prof.: Helder Roberto de O. Rocha Engenheiro Eletricista Doutorado em Computação Projeto de Sistemas de Controle pelo LDR Consiste em inserir pólos e zeros, na forma de um compensador,
Sistemas a Tempo Discreto - Projeto
 Sistemas a Tempo Discreto - Projeto 1. Especificações de Projeto no domínio discreto 2. Projeto via Emulação 2.1 Controladores Equivalentes Discretos 2.2 Mapeamento pólo-zero 2.3 Avaliação do projeto pag.1
Sistemas a Tempo Discreto - Projeto 1. Especificações de Projeto no domínio discreto 2. Projeto via Emulação 2.1 Controladores Equivalentes Discretos 2.2 Mapeamento pólo-zero 2.3 Avaliação do projeto pag.1
Controlo 4.ª AULA. Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente
 Docente") Escola Superior de Tecnologia de Setúbal Controlo 4.ª AULA Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente Prof.ª Sónia Marques
Escola Superior de Tecnologia de Setúbal Controlo 4.ª AULA Critério de Routh-Hurwitz Análise da Resposta em Frequência Entrada Sinusoidal Diagramas de Bode (Construção e Análise) Docente Prof.ª Sónia Marques
Desempenho de Sistemas de Controle Realimentados. 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste 2. Desempenho de sistemas de segunda ordem 3. Efeitos de um terceiro pólo e um zero na resposta de um sistema de segunda ordem 4. Estimação
Projeto por Intermédio do Lugar das Raízes
 CAPÍTULO NOVE Projeto por Intermédio do Lugar das Raízes SOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO Controle de Antena: Compensação por Atraso e Avanço de Fase a. Não-compensado: Com base no Desafio de Estudos
CAPÍTULO NOVE Projeto por Intermédio do Lugar das Raízes SOLUÇÕES DE DESAFIOS DOS ESTUDOS DE CASO Controle de Antena: Compensação por Atraso e Avanço de Fase a. Não-compensado: Com base no Desafio de Estudos
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.7 - Erros de Estado Estacionário Prof. Dr. Marcos Lajovic Carneiro Sistemas de Controle 2 Prof. Dr. Marcos Lajovic
Compensadores: projeto no domínio da
 Compensadores: projeto no domínio da frequência Relembrando o conteúdo das aulas anteriores: o Compensador (também conhecido como Controlador) tem o objetivo de compensar características ruins do sistema
Compensadores: projeto no domínio da frequência Relembrando o conteúdo das aulas anteriores: o Compensador (também conhecido como Controlador) tem o objetivo de compensar características ruins do sistema
Método do Lugar das Raízes
 Método do Lugar das Raízes Conceito de Lugar das Raízes; O Procedimento do Lugar das Raízes; Projeto de Parâmetros pelo Método do Lugar das Raízes; Sensibilidade e Lugar das Raízes; Controlador de Três
Método do Lugar das Raízes Conceito de Lugar das Raízes; O Procedimento do Lugar das Raízes; Projeto de Parâmetros pelo Método do Lugar das Raízes; Sensibilidade e Lugar das Raízes; Controlador de Três
CONTROLO. 3º ano 1º semestre Transparências de apoio às aulas teóricas. Capítulo Projecto Nyquist/Bode
 CONROLO 3º ano º semestre 202-203 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
CONROLO 3º ano º semestre 202-203 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab
 Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab I Análise de sistema com atraso Considere o sistema realimentado da figura (exercício da aula prática nº 1) e Ts G p onde era indicado que a planta
Teoria dos Sistemas LEEC 2002/2003 Utilização do Matlab I Análise de sistema com atraso Considere o sistema realimentado da figura (exercício da aula prática nº 1) e Ts G p onde era indicado que a planta
2 a Prova - CONTROLE DINÂMICO - 2 /2017
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
CONTROLO MEEC. 1º semestre 2018/2019. Transparências de apoio às aulas teóricas. Capítulo Projecto Nyquist/Bode. Maria Isabel Ribeiro António Pascoal
 CONROLO MEEC º semestre 208/209 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
CONROLO MEEC º semestre 208/209 ransparências de apoio às aulas teóricas Capítulo Projecto Nyquist/Bode Maria Isabel Ribeiro António Pascoal odos os direitos reservados Estas notas não podem ser usadas
ERRO EM REGIME PERMANENTE
 MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA ERRO EM REGIME PERMANENTE Inicialmente veja o sistema realimentado mostrado na figura
MINISTÉRIO DA EDUCAÇÃO E DO DESPORTO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA ERRO EM REGIME PERMANENTE Inicialmente veja o sistema realimentado mostrado na figura
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist
 Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
Aula 4 - Resposta em Frequência, Sensibilidade, Margem de Ganho e Margem de Fase, Controle em Avanço e Atraso, Critério de Nyquist Universidade de São Paulo Introdução Método da Resposta em Frequência
PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA
 DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero
DEPARTAMENTO DE ENGENHARIA NAVAL E OCEÂNICA ESCOLA POLITÉCNICA DA UNIVERSIDADE DE SÃO PAULO PNV 3324 FUNDAMENTOS DE CONTROLE EM ENGENHARIA NOTAS DE AULA* Prof. Helio Mitio Morishita * Este texto é um mero
Resposta no Tempo. Carlos Alexandre Mello. Carlos Alexandre Mello 1
 Resposta no Tempo Carlos Alexandre Mello 1 Resposta no Tempo - Introdução Como já discutimos, após a representação matemática de um subsistema, ele é analisado em suas respostas de transiente e de estadoestacionário
Resposta no Tempo Carlos Alexandre Mello 1 Resposta no Tempo - Introdução Como já discutimos, após a representação matemática de um subsistema, ele é analisado em suas respostas de transiente e de estadoestacionário
CONTROLO MEEC. 1º semestre 2016/2017. Transparências de apoio às aulas teóricas. Capítulo 12 Projecto Nyquist/Bode. Isabel Ribeiro António Pascoal
 CONROLO MEEC º semestre 206/207 ransparências de apoio às aulas teóricas Capítulo 2 Projecto Nyquist/Bode Isabel Ribeiro António Pascoal CONROLO º sem 206/207 odos os direitos reservados Estas notas não
CONROLO MEEC º semestre 206/207 ransparências de apoio às aulas teóricas Capítulo 2 Projecto Nyquist/Bode Isabel Ribeiro António Pascoal CONROLO º sem 206/207 odos os direitos reservados Estas notas não
Capítulo 9. Projeto por Intermédio do Lugar das Raízes (Continuação)
") Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
Capítulo 9 Projeto por Intermédio do Lugar das Raízes (Continuação) Fig. 9.50 Lugar das raízes para o sistema não-compensado do Exemplo 9.7 UP plano s 2 Tabela 9.8 Características previstas de sistemas
Projeto de Sistemas de Controle Realimentados
 Projeto de Sistemas de Controle Realimentados 1. Projeto de avanço de fase usando diagramas de Bode 2. Projeto de atraso de fase usando diagramas de Bode pag.1 Controle de Sistemas Lineares Aula 20 O projeto
Projeto de Sistemas de Controle Realimentados 1. Projeto de avanço de fase usando diagramas de Bode 2. Projeto de atraso de fase usando diagramas de Bode pag.1 Controle de Sistemas Lineares Aula 20 O projeto
SEM Sistemas de Controle. Aula 4 - Controladores PID, Avanço, Atraso, Esp. Estados
 SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
SEM 5928 - Sistemas de Controle Aula 4 - Controladores PID, Avanço, Atraso e no Espaço de Estados Universidade de São Paulo Controlador PID Controlador Proporcional Controlador Integral Controlador PID
Controle de Sistemas. Desempenho de Sistemas de Controle. Renato Dourado Maia. Universidade Estadual de Montes Claros. Engenharia de Sistemas
 Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas O é um telescópio de 2,4m, que fica a 380 milhas da Terra, sendo
Controle de Sistemas Desempenho de Sistemas de Controle Renato Dourado Maia Universidade Estadual de Montes Claros Engenharia de Sistemas O é um telescópio de 2,4m, que fica a 380 milhas da Terra, sendo
Pontifícia Universidade Católica de Goiás Escola de Engenharia. Aluno (a): Aula Laboratório 07 Cap 9 Resposta no Domínio do Tempo
: Aula Laboratório 07 Cap 9 Resposta no Domínio do Tempo") Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Filipe Fraga 07 Aluno (a): Aula Laboratório 07 Cap 9 Resposta no Domínio do Tempo 1- Considerações teóricas: A resposta de saída de
Escola de Engenharia Laboratório ENG 3503 Sistemas de Controle Prof: Filipe Fraga 07 Aluno (a): Aula Laboratório 07 Cap 9 Resposta no Domínio do Tempo 1- Considerações teóricas: A resposta de saída de
Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID)
 Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID)") Sistemas Realimentados Regulação e Tipo de sistema: Entrada de referência Entrada de distúrbio Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID) Fernando
Sistemas Realimentados Regulação e Tipo de sistema: Entrada de referência Entrada de distúrbio Controladores: Proporcional (P) Proporcional e Integral (PI) Proporcional, Integral e Derivativo (PID) Fernando
Sistemas de controle. Prof. André Schneider de Oliveira
 Sistemas de controle Prof. André Schneider de Oliveira Estrutura da apresentação Conceitos fundamentais do sistemas de controle Características da resposta Introdução à estabilidade Polos e zeros Conceito
Sistemas de controle Prof. André Schneider de Oliveira Estrutura da apresentação Conceitos fundamentais do sistemas de controle Características da resposta Introdução à estabilidade Polos e zeros Conceito
Análise e Projeto de Sistemas de Controle por Métodos Frequenciais 1/125
 8 Análise e Projeto de Sistemas de Controle por Métodos Frequenciais 1/125 Sumário 8.1. Introdução Resposta em Frequência 8.2. Diagramas de Bode 8.3. Estabilidade, Margem de Ganho e Margem de Fase 8.4.
8 Análise e Projeto de Sistemas de Controle por Métodos Frequenciais 1/125 Sumário 8.1. Introdução Resposta em Frequência 8.2. Diagramas de Bode 8.3. Estabilidade, Margem de Ganho e Margem de Fase 8.4.
Sistemas a Tempo Discreto
 Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Sistemas a Tempo Discreto 1. Caracterização de sistemas dinâmicos a tempo discreto 2. Transformada-Z 3. FT discreta, estabilidade e analogia com domínio-s 4. Sistemas amostrados 4.1 Amostragem e retenção
Resposta dos Exercícios da Apostila
 Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
Resposta dos Exercícios da Apostila Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com 5 de setembro de 0 Circuitos Elétricos. Passivos a) b) V o (s) V i (s) 64s + 400 s + 96s + 400, v o ( ) v i ( )
2.17 Matlab em Sistemas de Controle
 46 CAPÍTULO 2. INTRODUÇÃO AO MATLAB 2.17 Matlab em Sistemas de Controle Nesta seção, os comandos básicos do CONTROL SYSTEM Toolbox do MATLAB são introduzidos. O comando helpcontrol fornece uma lista das
46 CAPÍTULO 2. INTRODUÇÃO AO MATLAB 2.17 Matlab em Sistemas de Controle Nesta seção, os comandos básicos do CONTROL SYSTEM Toolbox do MATLAB são introduzidos. O comando helpcontrol fornece uma lista das
Erros de Estado Estacionário. Carlos Alexandre Mello. Carlos Alexandre Mello cabm@cin.ufpe.br 1
 Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Erros de Estado Estacionário Carlos Alexandre Mello 1 Introdução Projeto e análise de sistemas de controle: Resposta de Transiente Estabilidade Erros de Estado Estacionário (ou Permanente) Diferença entre
Unidade V - Desempenho de Sistemas de Controle com Retroação
 Unidade V - Desempenho de Sistemas de Controle com Retroação Introdução; Sinais de entrada para Teste; Desempenho de um Sistemas de Segunda Ordem; Efeitos de um Terceiro Pólo e de um Zero na Resposta Sistemas
Unidade V - Desempenho de Sistemas de Controle com Retroação Introdução; Sinais de entrada para Teste; Desempenho de um Sistemas de Segunda Ordem; Efeitos de um Terceiro Pólo e de um Zero na Resposta Sistemas
= + Exercícios. 1 Considere o modelo simplificado de um motor DC:
 7 Exercícios 1 Considere o modelo simplificado de um motor DC: a) Deduza, utilizando a definição, o seu equivalente discreto ZOH. b) Confirme a validade da expressão obtida com o resultado listado na tabela
7 Exercícios 1 Considere o modelo simplificado de um motor DC: a) Deduza, utilizando a definição, o seu equivalente discreto ZOH. b) Confirme a validade da expressão obtida com o resultado listado na tabela
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário
 Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Erro de Estado Estacionário Carlos Eduardo de Brito Novaes carlos.novaes@aedu.com http://professorcarlosnovaes.wordpress.com 24 de agosto de 202 Introdução Um aspecto muito importante em um sistema de
Fundamentos de Controlo
 Fundamentos de Controlo 6 a Série Projecto de Compensadores: Avanço/atraso de fase, moldagem do ganho de malha. S6.1 Exercícios Resolvidos P6.1 Considere o sistema de controlo com retroação unitária representado
Fundamentos de Controlo 6 a Série Projecto de Compensadores: Avanço/atraso de fase, moldagem do ganho de malha. S6.1 Exercícios Resolvidos P6.1 Considere o sistema de controlo com retroação unitária representado
Método do lugar das Raízes
 Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Entender os objetivos do método do lugar das raízes Aprender a traçar o lugar das raízes Interpretar o
Guilherme Luiz Moritz 1 1 DAELT - Universidade Tecnológica Federal do Paraná 03 de 2013 Objetivos Entender os objetivos do método do lugar das raízes Aprender a traçar o lugar das raízes Interpretar o
Aula 18. Carlos Amaral Fonte: Cristiano Quevedo Andrea
 Aula 8 Carlos Amaral Fonte: Cristiano Queveo Anrea UTFPR - Universiae Tecnológica Feeral o Paraná DAELT - Departamento Acaêmico e Eletrotécnica Curitiba, Junho e Comparação entre técnicas e controle Técnica
Aula 8 Carlos Amaral Fonte: Cristiano Queveo Anrea UTFPR - Universiae Tecnológica Feeral o Paraná DAELT - Departamento Acaêmico e Eletrotécnica Curitiba, Junho e Comparação entre técnicas e controle Técnica
EES-49/2012 Prova 2. Individual Duração: 100 minutos. Consulta permitida a uma página A4 com anotações pessoais e fórmulas.
 EES-49/2012 Prova 2 Individual Duração: 100 minutos Consulta permitida a uma página A4 com anotações pessoais e fórmulas. Permitido o uso de calculadora para a realização de operações básicas, incluindo
EES-49/2012 Prova 2 Individual Duração: 100 minutos Consulta permitida a uma página A4 com anotações pessoais e fórmulas. Permitido o uso de calculadora para a realização de operações básicas, incluindo
2 a Prova - CONTROLE DINÂMICO - 1 /2018
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Só é permitido o uso de calculadora científica básica. Universidade de Brasília (Números complexos
Sistemas de Controle 2
 Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro AED Cap.8 8.8 Lugar das Raízes Generalizado
Pontifícia Universidade Católica de Goiás Escola de Engenharia Sistemas de Controle 2 Cap.9 Projeto por Intermédio do Lugar das Raízes Prof. Dr. Marcos Lajovic Carneiro AED Cap.8 8.8 Lugar das Raízes Generalizado
Controle de Processos Aula: Sistema em malha fechada
 107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2017 E. S. Tognetti (UnB) Controle
107484 Controle de Processos Aula: Sistema em malha fechada Prof. Eduardo Stockler Tognetti Departamento de Engenharia Elétrica Universidade de Brasília UnB 1 o Semestre 2017 E. S. Tognetti (UnB) Controle
Faculdade de Engenharia da UERJ - Departamento de Engenharia Elétrica Controle & Servomecanismo I - Prof.: Paulo Almeida Exercícios Sugeridos
 Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Faculdade de Engenharia da UERJ Departamento de Engenharia Elétrica Controle & Servomecanismo I Prof.: Paulo Almeida Exercícios Sugeridos Estabilidade, Resposta Transitória e Erro Estacionário Exercícios
Sintonia de Controladores PID
 Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
Sintonia de Controladores PID Objetivo: Determinar K p, K i e K d de modo a satisfazer especificações de projeto. Os efeitos independentes dos ganhos K p, K i e K d na resposta de malha fechada do sistema
Método do Lugar das Raízes
 Método do Lugar das Raízes 1. Conceito do Lugar das Raízes 2. Virtudes do Lugar das Raízes (LR) pag.1 Controle de Sistemas Lineares Aula 8 No projeto de um sistema de controle, é fundamental determinar
Método do Lugar das Raízes 1. Conceito do Lugar das Raízes 2. Virtudes do Lugar das Raízes (LR) pag.1 Controle de Sistemas Lineares Aula 8 No projeto de um sistema de controle, é fundamental determinar
RESOLUÇÃO 3 a PROVA CONTROLE DINÂMICO - 2 /2015
 ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Não é permitido/necessário usar calculadora. Universidade de Brasília Prof. Adolfo Bauchspiess Auditório
ENE/FT/UnB Departamento de Engenharia Elétrica Prova individual, sem consulta. Faculdade de Tecnologia Não é permitido/necessário usar calculadora. Universidade de Brasília Prof. Adolfo Bauchspiess Auditório
Usando o MATLAB para estudar Controle Digital
 Usando o MATLAB para estudar Controle Digital Abril de 2012 Representações de SLITs I No MATLAB os Sistemas Lineares Invariantes no Tempo SLITs podem ser representadas no domínio do tempo, ou no domínio
Usando o MATLAB para estudar Controle Digital Abril de 2012 Representações de SLITs I No MATLAB os Sistemas Lineares Invariantes no Tempo SLITs podem ser representadas no domínio do tempo, ou no domínio
Identificação por Métodos Não Paramétricos
 Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 1 Identificação por Métodos Não Paramétricos Estimação da resposta impulsiva e da resposta em frequência Análise espectral e métodos
Modelação, Identificação e Controlo Digital Métodos Não Paramétricos 1 Identificação por Métodos Não Paramétricos Estimação da resposta impulsiva e da resposta em frequência Análise espectral e métodos
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores. Controlo 2005/2006
 Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2005/2006 Controlo digital de velocidade e de posição de um motor D.C. Elaborado por E. Morgado 1 e F. M.
Instituto Superior Técnico Licenciatura em Engenharia Electrotécnica e de Computadores Controlo 2005/2006 Controlo digital de velocidade e de posição de um motor D.C. Elaborado por E. Morgado 1 e F. M.
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos
 MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos LUGAR DAS RAÍZES INTRODUÇÃO O método do Lugar das Raízes é uma
MINISTÉRIO DA EDUCAÇÃO UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ DEPARTAMENTO ACADÊMICO DE ELETRÔNICA Prof. Paulo Roberto Brero de Campos LUGAR DAS RAÍZES INTRODUÇÃO O método do Lugar das Raízes é uma
1. Sinais de teste. 2. Sistemas de primeira ordem. 3. Sistemas de segunda ordem. Especificações para a resposta
 Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de
Desempenho de Sistemas de Controle Realimentados 1. Sinais de teste. Sistemas de primeira ordem 3. Sistemas de segunda ordem Especificações para a resposta Fernando de Oliveira Souza pag.1 Engenharia de