Computação Gráfica Viewing
|
|
|
- Francisca Marques Fontes
- 7 Há anos
- Visualizações:
Transcrição

1 Computação Gráfica Viewing Aluno:M arcio KassoufC rocom o Prof:R osane M inghim

2 O que é Viewing? Processo responsável por determinar o que será exibido no dispositivo de saída, e como Fonte: Software disponível em: Nate Robins: Main OpenGL Chronicles Allies :
3 Analogia com uma câmera Parâmetros a serem considerados ao bater uma foto: Posicionamento da câmera no espaço. Direção para onde a câmera aponta. Orientação da câmera Fonte Figura: Computer Graphics: C version. Cap. 12, Hearn & Baker
4 Viewing - Transformações Transformações entre sistemas de coordenadas:
5 Organização - Coordenadas de Viewing - Projeções - Volume de Visão - Recorte (Clipping)
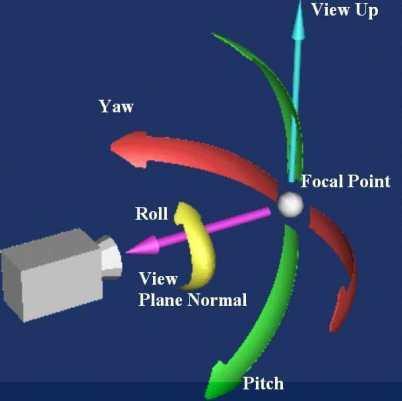
6 Sistema de Coordenadas de Viewing (VCS) Para obter um VCS, devemos determinar: - Origem do sistema de coordenadas P0 = (x 0,y 0,z 0 ). - Ponto focal. Orientação: Vetor chamado view up, ou V
7 Sistema de Coordenadas de Viewing (VCS) A partir dos 3 parâmetros definidos, temos os 3 vetores abaixo, que nos dão os eixos do nosso sistema de coordenadas de Viewing (X v, Y v e Z v ): V Vetor View Up N Vetor Normal ao plano de visão *. U Produto vetorial entre V e N (V x N) *Plano de visão: Plano perpendicular à linha que liga P0 ao ponto focal. Normalmente contém o ponto focal.
8 Sistemas de Coordenadas Sistemas de Coordenadas do Mundo (WCS) X w, Y w, Z w Sistemas de Coordenadas de Viewing (VCS) X v, Y v, Z v

9 Manipulação da Câmera Fonte Figura: Schröeder, The Visualization Toolkit, 1998
10 Manipulação da Câmera

11 Manipulação da Câmera Zoom in Zoom out
12 Manipulação da Câmera Dolly in Dolly out
13 Transformação WCS VCS Obter uma matriz de transformação (M wc,wv ) que leve um ponto que esteja no sistema de coordenadas do mundo para o sistema de coordenadas de viewing. Uma translação, seguida de 3 rotações: M wc,wv = R x * R z * R y * T
14 Transformação WCS VCS Sistemas de Coordenadas do Mundo (WCS) X w, Y w, Z w Sistemas de Coordenadas de Viewing (VCS) X v, Y v, Z v
15 Matriz de rotação direta Alternativa: Calcular a matriz de rotação direta: R. M wc,wv = R * T n= N N = n 1, n 2, n 3 u= V N V N = u 1, u 2, u 3 v =n u= v 1, v 2, v 3 R=[u 1 u 2 u 3 0 v 1 v 2 v 3 0 n 1 n 2 n ]
16 Matriz resultante - Mwc,wv T 1 u 2 u 3 0 v R=[u 1 v 2 v 3 1] 0 n 1 n 2 n M wc,vc = R T =[u 1 u 2 u 3 u P 0 v 1 v 2 v 3 v P 0 n 1 n 2 n 3 n P ] 0 0 x y =[1 0 ] z
17 Projeção Projeção Perspectiva x Projeção Paralela Fonte Figura: Computer Graphics: C version. Cap. 12, Hearn & Baker
18 Projeção Paralela x Perspectiva Projeção Perspectiva Objetos ficam menores a medida que se afastam do plano de projeção. Retas paralelas que não são paralelas com o plano de visão, se encontram em um Ponto de Fuga (PF) Visão mais realista Projeção Paralela Tamanhos dos objetos são mantidos independente da distância. Retas paralelas continuam paralelas quando projetadas. Visão menos realista
19 Projeção Perspectiva Outras características: Objetos posicionados após o centro de projeção, são exibidos invertidos na horizontal e na vertical. Pontos contidos no plano que contém o centro de projeção, e que é paralelo ao plano de visão, são projetados no infinito.
20 Projeção Paralela x Perspectiva
21 Projeção Perspectiva 2 pontos de fuga Fonte Figura: Computer Graphics: C version. Cap. 12, Hearn & Baker
22 3 pontos de fuga Projeção Perspectiva Fonte Figura: Computer Graphics: C version. Cap. 12, Hearn & Baker
23 Projeção Perspectiva Matriz de Transformação Como determinar as coordenadas em que a reta corta o plano de visão?
24 Projeção Perspectiva Matriz de Transformação Equações paramétricas da reta: x '=x xu y ' = y yu z '=z z z prp u A reta corta o plano em z' = z vp Substituindo na última equação, encontramos u: u= z vp z z prp z
25 Projeção Perspectiva Matriz de Transformação Substituindo u, temos: x p =x z prp z vp z prp z =x z prp z = y y p = y z prp z vp d p z prp z d p z prp z d p =z prp z vp Sendo d p a distância do plano de visão ao centro de projeção:
26 Projeção Perspectiva Matriz de Transformação Na forma matricial: [ x h y h z h h ]=[ z vp /d p z vp z prp /d p 0 0 1/d p z prp /d p ] [ 1] x y z Sendo h o fator homogêneo: h= z prp z d p
27 Projeção Perspectiva Matriz de Transformação s pontos xp e yp podem ser obtidos dividindo x h e y h pelo fator homogêneo h: x p =x h / h y p = y h /h Sendo h o fator homogêneo: h= z prp z d p
28 2 tipos: Projeção Paralela
29 Projeção Ortogonal Matriz de Transformação Os pontos no plano de visão são dados pelas coordenadas X v e Y v : M ort =[ ]
30 Projeção Oblíqua Fonte Figura: Computer Graphics: C version. Cap. 12, Hearn & Baker
31 Projeção Oblíqua Podemos calcular (x p,y p ) Sendo: x p =x Lcos y p = y Lsin L= z tan
32 Projeção Oblíqua Matriz de Projeção Reescrevendo para x p e y p : x p =x y p = y cos tan sin tan cos 1] 0 0 tan sin M paralela =[ tan
33 Volume de Visão Área Visível: Limitada nos eixos x e y pelo plano de visão, e no eixo z por dois planos de recorte: Fonte Figura: Computer Graphics: C version. Cap. 12, Hearn & Baker
34 Volume de Visão A área em forma de um paralelepipedo regular trás vantagens na hora de realizar o recorte. É possível realizar transformações para que a área seja sempre um paralelepípedo regular, mesmo quando usando projeção oblíqua ou perspectiva.
35 Transformação geral de projeção paralela Para transformar o volume de visão obtido através de uma projeção oblíqua em um paralelepípedo regular, é necessário aplicar uma matriz de cisalhamento.
36 Transformação Geral de Projeção Paralela Seja o vetor de projeção Vp = (p x,p y,p z ). Devemos encontrar a matriz de cisalhamento que o alinhe com o vetor normal ao plano de visão. V ' p =M paralela V p
37 Transformação geral de projeção paralela M paralela representa um cisalhamento no eixo z: M paralela =[1 0 a b ]
38 Transformação Geral de Projeção Paralela Obtemos então as seguintes equações: 0= p x ap z 0= p y ap z Resultando em: a= p x p z b= p y p z
39 Transformação Geral de Projeção Paralela Por semelhança de triângulos: a= p x p z b= p y p z = L cos z = Lsin z Podemos obter então a matriz de transformação direta de coordenadas do mundo para coordenadas de projeção, concatenando a matriz M paralela encontrada com a matriz M wc,wv
40 Transformação Geral de Projeção Perspectiva devemos aplicar duas transformações: Cisalhamento do volume de visão, para que a linha central de projeção fique perpendicular ao plano de visão. Escala, com um fator de 1/z, para tornar menor objetos mais distantes.
41 Transformação Geral de Projeção Perspectiva 0 a az prp M cisalhamento =[1 0 1 b bz prp ] a= x prp xw min xw max /2 z prp b= y prp yw min yw max / 2 z prp
42 Transformação Geral de Projeção Perspectiva x prp x prp z vp 0 z prp z vp z prp z vp y M escala =[1 0 1 prp y prp z vp ] z prp z vp z prp z vp z 0 0 prp z prp z vp z prp z vp Podemos obter então a matriz de transformação direta de coordenadas do mundo para coordenadas de projeção, concatenando as matrizes M cisalhamento, M escala e M wc,wv
43 Recorte (Clipping) Um ponto (x,y,z) está fora do limite exercido por um plano se Ax + By + Cz + D > 0, e está dentro do limite caso contrário. Para testar se uma linha está dentro ou fora da região visível, testamos seus dois pontos extremos.
44 Recorte (Clipping) Caso ambos os pontos extremos de uma linha estejam fora de um plano delimitador, a linha é descartada (está fora do volume de visão). Caso ambos os pontos estejam dentro dos limites de todos os planos delimitadores, a linha é salva.
45 Recorte (Clipping) A intersecção de uma linha com um plano é encontrada quando a equação Ax + By + Cz + D = 0 é satisfeita.
46 Recorte (Clipping) volume de visão é um paralelepípedo regular verificação mais simples. Basta verificar se cada coordenada dos pontos está dentro do intervalo definido pelos planos delimitadores.
47 Recorte (Clipping) Estratégia: Sejam os planos que limitam o volume de visão, representados pelas coordenadas: xv min (esquerda) xv max (direita) yv min (baixo) yv max (cima) zv min <(frente) zv max (trás)
48 Recorte (Clipping) Usar 6 bits para identificar a localização de um ponto: bit 1 = 1, se x< xv min bit 2 = 1, se x> xv max bit 3 = 1, se y< yv min bit 4 = 1, se y> yv max bit 5 = 1, se z< zv min bit 6 = 1, se z> zv max qualquer sequência de bits diferente de indica um ponto que está fora da região de visão.
49 Recorte (Clipping) Um segmento de reta está dentro da região visível pontos extremos Quando pelo menos um dos pontos não possui uma sequência , aplica-se o operador lógico and. resultado diferente de 0 ambos os pontos estão fora de um mesmo limitador
50 Recorte (Clipping) No caso de não conseguir identificar se o segmento de reta está completamente dentro ou fora do volume, deve-se testar utilizando pontos de intersecção com os planos limitantes.
51 Recorte (Clipping) Para encontrar os pontos de intersecção com os planos limitantes, substitui-se o valor da coordenada daquela plano na equação apropriada: x= x 1 x 2 x 1 u, y= y 1 y 2 y 1 u, z =z 1 z 2 z 1 u,
52 Capítulo 12 Hearn & Baker Bibliografia Nate Robins: Main OpenGL Chronicles Allies: Geometria Analítica: um tratamento Vetorial, Paulo Boulos, Ivan de Camargo Schröeder, The Visualization Toolkit, 1998
53 Agradecimentos Prof. Rosane M inghim Danilo M edeiros Eler
USP Universidade de São Paulo
 USP Universidade de São Paulo ICMC Instituto de Ciências Matemáticas e de Computação Computação Gráfica Notas Didáticas - Viewing Aluno: Marcio Kassouf Crocomo Professora Doutora Rosane Minghim São Carlos
USP Universidade de São Paulo ICMC Instituto de Ciências Matemáticas e de Computação Computação Gráfica Notas Didáticas - Viewing Aluno: Marcio Kassouf Crocomo Professora Doutora Rosane Minghim São Carlos
Viewing Pipeline 2D. Viewing Pipeline 2D/3D. Viewing Pipeline 2D. Viewing (onde estamos no pipeline) Maria Cristina F. de Oliveira Rosane Minghim 2010
 Maria Cristina F. de Oliveira Rosane Minghim 2010") Viewing Pipeline 2D Viewing Pipeline 2D/3D Maria Cristina F. de Oliveira Rosane Minghim 21 Processo de determinar quais objetos da cena serão exibidos na tela, e como Transformação da cena, definida no
Viewing Pipeline 2D Viewing Pipeline 2D/3D Maria Cristina F. de Oliveira Rosane Minghim 21 Processo de determinar quais objetos da cena serão exibidos na tela, e como Transformação da cena, definida no
Geometria Analítica. Estudo do Plano. Prof Marcelo Maraschin de Souza
 Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Geometria Analítica Estudo do Plano Prof Marcelo Maraschin de Souza Plano Equação Geral do Plano Seja A(x 1, y 1, z 1 ) um ponto pertencente a um plano π e n = a, b, c, n 0, um vetor normal (ortogonal)
Introdução ao Processamento e Síntese de imagens - Projeções
 Introdução ao Processamento e Síntese de imagens - Projeções Júlio Kiyoshi Hasegawa Fontes: Esperança e Cavalcanti (22) (UFRJ) e Traina e Oliveira (24) (USP) Antonio Maria Garcia Tommaselli - notas de
Introdução ao Processamento e Síntese de imagens - Projeções Júlio Kiyoshi Hasegawa Fontes: Esperança e Cavalcanti (22) (UFRJ) e Traina e Oliveira (24) (USP) Antonio Maria Garcia Tommaselli - notas de
Pipeline de Visualização 3D
 Pipeline de Visualização 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Processo de Visualização https://www.youtube.com/watch?v=ogqam2mykng Processo de
Pipeline de Visualização 3D André Tavares da Silva andre.silva@udesc.br Capítulo 5 de Foley Capítulo 2 de Azevedo e Conci Processo de Visualização https://www.youtube.com/watch?v=ogqam2mykng Processo de
Geometria Analítica - Retas e Planos
 Geometria Analítica - Retas e Planos Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Ângulos Turmas E1 e E3 1 / 10 Objetivos 1 Estudar ângulos entre retas, entre planos e entre retas
Geometria Analítica - Retas e Planos Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Ângulos Turmas E1 e E3 1 / 10 Objetivos 1 Estudar ângulos entre retas, entre planos e entre retas
Robótica Experimental
 UNVERSDADE FEDERAL DO RO GRANDE DO NORTE Universidade Federal do Rio Grande do Norte Centro de Tecnologia Dept o de Engenharia de Computação e Automação DCA Robótica Eperimental Material didático Adelardo
UNVERSDADE FEDERAL DO RO GRANDE DO NORTE Universidade Federal do Rio Grande do Norte Centro de Tecnologia Dept o de Engenharia de Computação e Automação DCA Robótica Eperimental Material didático Adelardo
Aula 7 Equação Vetorial da Reta e Equação Vetorial do plano
 Aula 7 Equação Vetorial da Reta e Equação Vetorial do plano Prof Luis Carlos As retas podem estar posicionadas em planos (R 2 ) ou no espaço (R 3 ). Retas no plano possuem pontos com duas coordenadas,
Aula 7 Equação Vetorial da Reta e Equação Vetorial do plano Prof Luis Carlos As retas podem estar posicionadas em planos (R 2 ) ou no espaço (R 3 ). Retas no plano possuem pontos com duas coordenadas,
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti
 Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Transformações Geométricas em C.G. Claudio Esperança Paulo Roma Cavalcanti Geometria Euclideana Geometria Sintética: Axiomas e Teoremas Por coordenadas: Álgebra Linear Geometria Euclideana Espaço Vetorial
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 3. Transformações Geométricas
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 3 Transformações Geométricas no plano e no espaço Introdução (Geometria) 2 Pontos, Vetores e Matrizes Dado
Computação Gráfica Transformações Projetivas
 Computação Gráfica Transformações Projetivas Professora: Sheila Cáceres Transformações Projetivas Projetar modelos geométricos 3D numa imagem 2D, exibível em dispositivos de saída 2D Exemplo: 2 Projeção
Computação Gráfica Transformações Projetivas Professora: Sheila Cáceres Transformações Projetivas Projetar modelos geométricos 3D numa imagem 2D, exibível em dispositivos de saída 2D Exemplo: 2 Projeção
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Retas e planos no espaço
 Retas e planos no espaço Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Retas e Segmentos de Reta no Espaço 2 Equação vetorial
Retas e planos no espaço Jorge M. V. Capela, Marisa V. Capela Instituto de Química - UNESP Araraquara, SP capela@iq.unesp.br Araraquara, SP - 2017 1 Retas e Segmentos de Reta no Espaço 2 Equação vetorial
Projeções e Transformações em 3D
 Projeções e Transformações em 3D Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário O que são projeções Conversão 3D-2D Tipos de Projeção Projeções Paralelas Projeções Isométricas
Projeções e Transformações em 3D Computação Gráfica DCC065 Prof. Rodrigo Luis de Souza da Silva, D.Sc. Sumário O que são projeções Conversão 3D-2D Tipos de Projeção Projeções Paralelas Projeções Isométricas
Visualização 3D. Soraia Raupp Musse
 Visualização 3D Soraia Raupp Musse 1 Pipeline de Visualização Em 2D as coisas são mais simples Simplesmente especificar uma janela do mundo 2D e uma viewport na superfície de visualização A complexidade
Visualização 3D Soraia Raupp Musse 1 Pipeline de Visualização Em 2D as coisas são mais simples Simplesmente especificar uma janela do mundo 2D e uma viewport na superfície de visualização A complexidade
Capítulo 12. Ângulo entre duas retas no espaço. Definição 1. O ângulo (r1, r2 ) entre duas retas r1 e r2 é assim definido:
 entre duas retas r1 e r2 é assim definido:") Capítulo 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r é assim definido: (r1, r ) 0o se r1 e r são coincidentes, se as retas são concorrentes, isto é, r1
Capítulo 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r é assim definido: (r1, r ) 0o se r1 e r são coincidentes, se as retas são concorrentes, isto é, r1
Transformações 3D. Soraia Raupp Musse
 Transformações 3D Soraia Raupp Musse 1 Translação Coord. Homogêneas x y 1 t x 1 t y 1 x y x y x + t x y + t y t p p r r r + ' 2 x y x + t x y + t y y Escala Coord. Homogêneas x y s x s y 1 x y x y s x
Transformações 3D Soraia Raupp Musse 1 Translação Coord. Homogêneas x y 1 t x 1 t y 1 x y x y x + t x y + t y t p p r r r + ' 2 x y x + t x y + t y y Escala Coord. Homogêneas x y s x s y 1 x y x y s x
Visualização por Computador: Teoria, Prática e Aplicações
 Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Visualização por Computador: Teoria, Prática e Aplicações Noções de Geometria e Álgebra Linear Claudio Esperança Programa de Engenharia de Sistemas e Computação COPPE / UFRJ Master of Information Management,
Computação Gráfica. Engenharia de Computação. CEFET/RJ campus Petrópolis. Prof. Luis Retondaro. Aula 6. Projeções
 Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Computação Gráfica Engenharia de Computação CEFET/RJ campus Petrópolis Prof. Luis Retondaro Aula 6 Projeções 2 Projeções Geométricas Projeções permitem a visualização bidimensional de objetos tridimensionais.
Computação Gráfica - 09
 Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
Universidade Federal do Vale do São Francisco Curso de Engenharia da Computação Computação Gráfica - 9 jorge.cavalcanti@univasf.edu.br www.univasf.edu.br/~jorge.cavalcanti www.twitter.com/jorgecav Objetos
10 Visualização em 3D - Projeções
 INSTITUTO DE CIÊNCIAS MATEMÁTICAS E DE COMPUTAÇÃO DEPARTAMENTO DE CIÊNCIAS DE COMPUTAÇÃO E ESTATÍSTICA 10 Visualização em 3D - Projeções Após a criação de cenas e objetos tridimensionais o próximo passo
INSTITUTO DE CIÊNCIAS MATEMÁTICAS E DE COMPUTAÇÃO DEPARTAMENTO DE CIÊNCIAS DE COMPUTAÇÃO E ESTATÍSTICA 10 Visualização em 3D - Projeções Após a criação de cenas e objetos tridimensionais o próximo passo
Aula Distância entre duas retas paralelas no espaço. Definição 1. Exemplo 1
 Aula 1 Sejam r 1 = P 1 + t v 1 t R} e r 2 = P 2 + t v 2 t R} duas retas no espaço. Se r 1 r 2, sabemos que r 1 e r 2 são concorrentes (isto é r 1 r 2 ) ou não se intersectam. Quando a segunda possibilidade
Aula 1 Sejam r 1 = P 1 + t v 1 t R} e r 2 = P 2 + t v 2 t R} duas retas no espaço. Se r 1 r 2, sabemos que r 1 e r 2 são concorrentes (isto é r 1 r 2 ) ou não se intersectam. Quando a segunda possibilidade
Aula 12. Ângulo entre duas retas no espaço. Definição 1. O ângulo (r1, r2 ) entre duas retas r1 e r2 se define da seguinte maneira:
 entre duas retas r1 e r2 se define da seguinte maneira:") Aula 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r se define da seguinte maneira: (r1, r ) 0o se r1 e r são coincidentes, Se as retas são concorrentes, isto
Aula 1 1. Ângulo entre duas retas no espaço Definição 1 O ângulo (r1, r ) entre duas retas r1 e r se define da seguinte maneira: (r1, r ) 0o se r1 e r são coincidentes, Se as retas são concorrentes, isto
01. Determinar as equações da reta que passa pelo ponto A( 2, 3, 2) e tem a. = 2x. v são: b c
 e tem a. = 2x. v são: b c") 01. Determinar as equações da reta que passa pelo ponto A(, 3, ) e tem a direção do vetor v = 3 i + k. a = 3 As componentes do vetor v são: b = 0. c = Tendo em vista que b = 0, a reta se acha num plano
01. Determinar as equações da reta que passa pelo ponto A(, 3, ) e tem a direção do vetor v = 3 i + k. a = 3 As componentes do vetor v são: b = 0. c = Tendo em vista que b = 0, a reta se acha num plano
GAAL /1 - Simulado - 2 produto escalar, produto vetorial, retas e planos. Exercício 1: Determine a equação do plano em cada situação descrita.
 GAAL - 2013/1 - Simulado - 2 produto escalar, produto vetorial, retas e planos SOLUÇÕES Exercício 1: Determine a equação do plano em cada situação descrita. (a) O plano passa pelo ponto A = (2, 0, 2) e
GAAL - 2013/1 - Simulado - 2 produto escalar, produto vetorial, retas e planos SOLUÇÕES Exercício 1: Determine a equação do plano em cada situação descrita. (a) O plano passa pelo ponto A = (2, 0, 2) e
I Lista Introodução a Planos
 Colegiado de Engenharia Elétrica Prof. Pedro Macário de Moura Pedro.mmoura@univasf.edu.br Geometria Analítica 201.2 Discente CPF Turma I Lista Introodução a Planos 01. Determine a equação do plano que
Colegiado de Engenharia Elétrica Prof. Pedro Macário de Moura Pedro.mmoura@univasf.edu.br Geometria Analítica 201.2 Discente CPF Turma I Lista Introodução a Planos 01. Determine a equação do plano que
Viewing Pipeline 2D. Viewing Pipeline 2D/3D. Viewing Pipeline 2D. Viewing Pipeline 2D. Maria Cristina F. de Oliveira Rosane Minghim 2005
 Viewing Pieline 2D Viewing Pieline 2D/3D Maria Cristina F. de Oliveira Rosane Minghim 2005 Processo de determinar quais objetos da cena serão exibidos na tela, e como Transformação da cena, definida no
Viewing Pieline 2D Viewing Pieline 2D/3D Maria Cristina F. de Oliveira Rosane Minghim 2005 Processo de determinar quais objetos da cena serão exibidos na tela, e como Transformação da cena, definida no
Ô, 04 ! ^ D. Exercícios
 O Espaço 93 O, 0,0), Q 2 (6, O, 0), Q 3 (6, 8, 0), Q 4 (0, 8,0), Q 5 (6, O, 4),
O Espaço 93 O, 0,0), Q 2 (6, O, 0), Q 3 (6, 8, 0), Q 4 (0, 8,0), Q 5 (6, O, 4),
- Aula 6 - Visualização 3D: Projeções
 - Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
- Aula 6 - Visualiação 3D: Projeções Visualiação 3D Modelo geométrico Imagem Pipeline de visualiação Modificado de M.M. Oliveira Visualiação 3D câmera Projeção ortográfica projeção perspectiva câmera Projeções
1 Segmentos orientados e vetores, adição e multiplicação
 MAP2110 Modelagem e Matemática 1 o Semestre de 2007 Resumo 1 - Roteiro de estudos - 07/05/2007 Espaços vetoriais bi e tri-dimensionais (plano ou espaço bidimensional E 2, e espaço tridimensional E 3 )
MAP2110 Modelagem e Matemática 1 o Semestre de 2007 Resumo 1 - Roteiro de estudos - 07/05/2007 Espaços vetoriais bi e tri-dimensionais (plano ou espaço bidimensional E 2, e espaço tridimensional E 3 )
Aula Exemplos diversos. Exemplo 1
 Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
Aula 3 1. Exemplos diversos Exemplo 1 Determine a equação da hipérbole equilátera, H, que passa pelo ponto Q = ( 1, ) e tem os eixos coordenados como assíntotas. Como as assíntotas da hipérbole são os
J. Delgado - K. Frensel - L. Crissaff Geometria Analítica e Cálculo Vetorial
 178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
178 Capítulo 10 Equação da reta e do plano no espaço 1. Equações paramétricas da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
http://computacaografica.ic.uff.br/conteudocap2.html aula9 Perspetivas 2018/2 IC / UFF Sempre mais real Projetar em Perspectivas Perspectivas se classificam de acordo com o numero de pontos de FUGA O que
Projeções. Prof. Márcio Bueno
 Projeções Prof. Márcio Bueno {cgtarde,cgnoite}@marciobueno.com Projeções Visão humana: enxerga em 2D, a sensação de profundidade vem da diferença entre as vistas esquerda e direita do mesmo objeto Projeção:
Projeções Prof. Márcio Bueno {cgtarde,cgnoite}@marciobueno.com Projeções Visão humana: enxerga em 2D, a sensação de profundidade vem da diferença entre as vistas esquerda e direita do mesmo objeto Projeção:
Viewing 3D. SCC Computação Gráfica. Prof. Fernando V. Paulovich
 Viewing 3D SCC0250 - Computação Gráfica Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo
Viewing 3D SCC0250 - Computação Gráfica Prof. Fernando V. Paulovich http://www.icmc.usp.br/~paulovic paulovic@icmc.usp.br Instituto de Ciências Matemáticas e de Computação (ICMC) Universidade de São Paulo
-INF Aula 17 Visualização 3D: Projeções
 Visualiação 3D -INF147- Aula 17 Visualiação 3D: Projeções Modelo geométrico Pipeline de visualiação Imagem Modificado de M.M. Oliveira Visualiação 3D Projeções paralelas e perspectiva câmera Projeção ortográfica
Visualiação 3D -INF147- Aula 17 Visualiação 3D: Projeções Modelo geométrico Pipeline de visualiação Imagem Modificado de M.M. Oliveira Visualiação 3D Projeções paralelas e perspectiva câmera Projeção ortográfica
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. ramal 5981
 CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
CC Visão Computacional Geometria Projetiva Instituto ecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala IEC ramal 598 ópicos da aula Rotação em D, Escala e Refleo Deformação do quadrado unitário
Sist. Coordenadas Câmera (SCC)
") Transformações Modelagem Iluminação (Shading) Transformação Câmera* Recorte Projeção* Mapeamento de coordenadas de Universo para câmera Escolha da projeção: perspectiva ou ortográfica Resumo Rasterização
Transformações Modelagem Iluminação (Shading) Transformação Câmera* Recorte Projeção* Mapeamento de coordenadas de Universo para câmera Escolha da projeção: perspectiva ou ortográfica Resumo Rasterização
Transformações Geométricas. Transformações Geométricas. Sistemas de Coordenadas. Translação: M.C.F. de Oliveira Rosane Minghim 2006
 Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
Transformações Geométricas Transformações Geométricas 2D M.C.F. de Oliveira Rosane Minghim 2006 Aplicadas aos modelos gráficos para alterar a geometria dos objetos, sem alterar a topologia Porque são necessárias:
UNIVERSIDADE FEDERAL DE ALAGOAS INSTITUTO DE MATEMÁTICA Aluno(a): Professor(a): Curso:
: Professor(a): Curso:") 5 Geometria Analítica - a Avaliação - 6 de setembro de 0 Justique todas as suas respostas.. Dados os vetores u = (, ) e v = (, ), determine os vetores m e n tais que: { m n = u, v u + v m + n = P roj u
5 Geometria Analítica - a Avaliação - 6 de setembro de 0 Justique todas as suas respostas.. Dados os vetores u = (, ) e v = (, ), determine os vetores m e n tais que: { m n = u, v u + v m + n = P roj u
Perspectivas Cap 2 (do livro texto) Aula 7 UFF
 Aula 7 UFF") Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
Perspectivas Cap 2 (do livro texto) Aula 7 UFF - 2014 Ponto de fuga Características Projeções Planas: Classificação básica: b Considerando P ( x, y, z ) Qual sua relação com sua projeção no plano z=0
G1 de Álgebra Linear I Gabarito
 G1 de Álgebra Linear I 2013.1 6 de Abril de 2013. Gabarito 1) Considere o triângulo ABC de vértices A, B e C. Suponha que: (i) o vértice B do triângulo pertence às retas de equações paramétricas r : (
G1 de Álgebra Linear I 2013.1 6 de Abril de 2013. Gabarito 1) Considere o triângulo ABC de vértices A, B e C. Suponha que: (i) o vértice B do triângulo pertence às retas de equações paramétricas r : (
Visualização e Projeções
 Visualização e Projeções 35M34 Sala 3E1 Bruno Motta de Carvalho DIMAp Sala 15 Ramal 227 1 Introdução Arestas de mesmo tamanho tem tamanhos aparentes diferentes Linhas paralelas convergindo História Vasos
Visualização e Projeções 35M34 Sala 3E1 Bruno Motta de Carvalho DIMAp Sala 15 Ramal 227 1 Introdução Arestas de mesmo tamanho tem tamanhos aparentes diferentes Linhas paralelas convergindo História Vasos
Transformações Geométricas para Visualização 3D
 Sistemas Gráficos para Engenharia - M. Gattass & L. F. Martha Março - 8 Transformações Geométricas para Visualiação 3D por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando
Sistemas Gráficos para Engenharia - M. Gattass & L. F. Martha Março - 8 Transformações Geométricas para Visualiação 3D por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando
Lista 5. Em toda a lista, as coordenadas referem-se a um sistema de coordenadas fixo (O; i, j, k)
") UFPR - Universidade Federal do Paraná Departamento de Matemática CM045 - Geometria Analítica Prof. José Carlos Eidam Lista 5 Em toda a lista, as coordenadas referem-se a um sistema de coordenadas fixo
UFPR - Universidade Federal do Paraná Departamento de Matemática CM045 - Geometria Analítica Prof. José Carlos Eidam Lista 5 Em toda a lista, as coordenadas referem-se a um sistema de coordenadas fixo
Geometria Analítica. Estudo da Reta. Prof Marcelo Maraschin de Souza
 Geometria Analítica Estudo da Reta Prof Marcelo Maraschin de Souza Reta Considere um ponto A(x 1, y 1, z 1 ) e um vetor não-nulo v = a, b, c. Só existe uma reta r que passa por A e tem a direção de v.
Geometria Analítica Estudo da Reta Prof Marcelo Maraschin de Souza Reta Considere um ponto A(x 1, y 1, z 1 ) e um vetor não-nulo v = a, b, c. Só existe uma reta r que passa por A e tem a direção de v.
Sumário. Introdução Câmera sintética Window-to-Viewport Exercício. 29-May-13 Leandro Tonietto!2
 Câmera Sintética Leandro Tonietto Computação Gráfica Desenvolvimento Jogos e Entretenimento Digital ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/pgr/camerasintetica.pdf 05-13 29-May-13
Câmera Sintética Leandro Tonietto Computação Gráfica Desenvolvimento Jogos e Entretenimento Digital ltonietto@unisinos.br http://professor.unisinos.br/ltonietto/jed/pgr/camerasintetica.pdf 05-13 29-May-13
n. 20 EQUAÇÃO GERAL DO PLANO O plano π pode ser definido como o conjunto de todos os pontos P (x, y, z) do
 do") n. 20 EQUAÇÃO GERAL DO PLANO Seja A (x 1, y 1, z 1 ) um ponto que pertence ao plano π e n = a i + b j + c k, sendo n (0, 0, 0) um vetor ortogonal ao plano. O plano π pode ser definido como o conjunto de
n. 20 EQUAÇÃO GERAL DO PLANO Seja A (x 1, y 1, z 1 ) um ponto que pertence ao plano π e n = a i + b j + c k, sendo n (0, 0, 0) um vetor ortogonal ao plano. O plano π pode ser definido como o conjunto de
10. Determine as equações cartesianas das famílias de retas que fazem um ângulo de π/4 radianos com a reta y = 2x + 1.
 Geometria Analítica. 1. Determine as posições relativas e as interseções entre os conjuntos em R abaixo. Em cada item também faça um esboço dos dois conjuntos dados no mesmo sistema de eixos. (a) C : (x
Geometria Analítica. 1. Determine as posições relativas e as interseções entre os conjuntos em R abaixo. Em cada item também faça um esboço dos dois conjuntos dados no mesmo sistema de eixos. (a) C : (x
BC Geometria Analítica. Lista 4
 BC0404 - Geometria Analítica Lista 4 Nos exercícios abaixo, deve-se entender que está fixado um sistema de coordenadas cartesianas (O, E) cuja base E = ( i, j, k) é ortonormal (e positiva, caso V esteja
BC0404 - Geometria Analítica Lista 4 Nos exercícios abaixo, deve-se entender que está fixado um sistema de coordenadas cartesianas (O, E) cuja base E = ( i, j, k) é ortonormal (e positiva, caso V esteja
MAT VETORES E GEOMETRIA - IF/IME 1 o SEMESTRE Suponha fixado um sistema de coordenadas ortogonal cuja base é positiva.
 MAT 11 - VETORES E GEOMETRIA - IF/IME 1 o SEMESTRE 015 LISTA Suponha fixado um sistema de coordenadas ortogonal cuja base é positiva. 1. Sejam A = (1, 1, 1), B = (0, 0, 1) e r : X = (1, 0, 0) + λ(1, 1,
MAT 11 - VETORES E GEOMETRIA - IF/IME 1 o SEMESTRE 015 LISTA Suponha fixado um sistema de coordenadas ortogonal cuja base é positiva. 1. Sejam A = (1, 1, 1), B = (0, 0, 1) e r : X = (1, 0, 0) + λ(1, 1,
Aula Exemplos e aplicações - continuação. Exemplo 8. Nesta aula continuamos com mais exemplos e aplicações dos conceitos vistos.
 Aula 1 Nesta aula continuamos com mais exemplos e aplicações dos conceitos vistos. 1. Exemplos e aplicações - continuação Exemplo 8 Considere o plano π : x + y + z = 3 e a reta r paralela ao vetor v =
Aula 1 Nesta aula continuamos com mais exemplos e aplicações dos conceitos vistos. 1. Exemplos e aplicações - continuação Exemplo 8 Considere o plano π : x + y + z = 3 e a reta r paralela ao vetor v =
Gabarito - P1 de CG 2019 /1
 Gabarito - P1 de CG 2019 /1 1- Mencione qual a vantagem de usar estruturas de dados baseada em Faces e Vértices para criar objetos ao invés de apenas uma estrutura baseada em coordenadas dos Vértices.
Gabarito - P1 de CG 2019 /1 1- Mencione qual a vantagem de usar estruturas de dados baseada em Faces e Vértices para criar objetos ao invés de apenas uma estrutura baseada em coordenadas dos Vértices.
Capítulo Equações da reta no espaço. Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que
 Capítulo 11 1. Equações da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que AP = t AB Fig. 1: Reta r passando por A e B. Como o ponto
Capítulo 11 1. Equações da reta no espaço Sejam A e B dois pontos distintos no espaço e seja r a reta que os contém. Então, P r existe t R tal que AP = t AB Fig. 1: Reta r passando por A e B. Como o ponto
TÓPICO. Fundamentos da Matemática II APLICAÇÕES NA GEOMETRIA ANALÍTICA. Licenciatura em Ciências USP/ Univesp. Gil da Costa Marques
 APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
APLICAÇÕES NA GEOMETRIA ANALÍTICA 4 Gil da Costa Marques TÓPICO Fundamentos da Matemática II 4.1 Geometria Analítica e as Coordenadas Cartesianas 4.2 Superfícies 4.2.1 Superfícies planas 4.2.2 Superfícies
MINISTÉRIO DA EDUCAÇÃO CENTRO FEDERAL DE EDUCAÇÃO TECNOLÓGICA DE MINAS GERAIS CONSELHO DE GRADUAÇÃO
 DISCIPLINA: GEOMETRIA ANALÍTICA E ÁLGEBRA VETORIAL CÓDIGO: 2DB.004 VALIDADE: Início: 01/2013 Término: Eixo: Matemática Carga Horária: Total: 75 horas/ 90 horas-aula Semanal: 06 aulas Créditos: 6 Modalidade:
DISCIPLINA: GEOMETRIA ANALÍTICA E ÁLGEBRA VETORIAL CÓDIGO: 2DB.004 VALIDADE: Início: 01/2013 Término: Eixo: Matemática Carga Horária: Total: 75 horas/ 90 horas-aula Semanal: 06 aulas Créditos: 6 Modalidade:
APLICAÇÕES NA GEOMETRIA ANALÍTICA
 4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
4 APLICAÇÕES NA GEOMETRIA ANALÍTICA Gil da Costa Marques 4.1 Geometria Analítica e as Coordenadas Cartesianas 4. Superfícies 4..1 Superfícies planas 4.. Superfícies limitadas e não limitadas 4.3 Curvas
Prof. Fernando Carneiro Rio de Janeiro, Outubro de 2015
 Ga - retas e planos na solução de problemas 1 GA - Retas e planos na solução de problemas Prof. Fernando Carneiro Rio de Janeiro, Outubro de 2015 1 Reta concorrente a duas retas dadas Este tipo de problema
Ga - retas e planos na solução de problemas 1 GA - Retas e planos na solução de problemas Prof. Fernando Carneiro Rio de Janeiro, Outubro de 2015 1 Reta concorrente a duas retas dadas Este tipo de problema
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática. Transformações 2D
 Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Universidade de Aveiro Departamento de Electrónica, Telecomunicações e Informática Transformações 2D Computação Visual Beatriz Sousa Santos, Joaquim Madeira Transformações 2D Posicionar, orientar e escalar
Curso de Geometria Analítica
 Curso de Geometria Analítica Abrangência: Graduação em Engenharia e Matemática - Professor Responsável: Anastassios H. Kambourakis Resumo Teórico 10 - Posições relativas entre Pontos Retas e Planos. I.
Curso de Geometria Analítica Abrangência: Graduação em Engenharia e Matemática - Professor Responsável: Anastassios H. Kambourakis Resumo Teórico 10 - Posições relativas entre Pontos Retas e Planos. I.
Na figura acima, o vetor tem origem no ponto A e extremidade no ponto B. Notação usual: 1 O ESPAÇO R3
 VETORES E R3 Ultra-Fast Prof.: Fábio Rodrigues fabio.miranda@engenharia.ufjf.br Obs.: A maioria das figuras deste texto foram copiadas do livro virtual álgebra vetorial e geometria analítica, 9ª edição,
VETORES E R3 Ultra-Fast Prof.: Fábio Rodrigues fabio.miranda@engenharia.ufjf.br Obs.: A maioria das figuras deste texto foram copiadas do livro virtual álgebra vetorial e geometria analítica, 9ª edição,
Transformações de Visualização 2D: Clipping. Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro
 Transformações de Visualização 2D: Clipping Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro 1 Clipping (recorte) Qualquer procedimento que identifica porções de uma figura que estão
Transformações de Visualização 2D: Clipping Antonio L. Bajuelos Departamento de Matemática Universidade de Aveiro 1 Clipping (recorte) Qualquer procedimento que identifica porções de uma figura que estão
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia de Computação 03 de Julho de Prof o. E.T.
 Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia de Computação 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M é
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia de Computação 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M é
5 de setembro de Gabarito. 1) Considere o ponto P = (0, 1, 2) e a reta r de equações paramétricas. r: (2 t, 1 t, 1 + t), t R.
 Considere o ponto P = (0, 1, 2) e a reta r de equações paramétricas. r: (2 t, 1 t, 1 + t), t R.") G1 de Álgebra Linear I 20072 5 de setembro de 2007 Gabarito 1) Considere o ponto P = (0, 1, 2) e a reta r de equações paramétricas r: (2 t, 1 t, 1 + t), t R (a) Determine a equação cartesiana do plano
G1 de Álgebra Linear I 20072 5 de setembro de 2007 Gabarito 1) Considere o ponto P = (0, 1, 2) e a reta r de equações paramétricas r: (2 t, 1 t, 1 + t), t R (a) Determine a equação cartesiana do plano
Geometria Analítica - Sistemas de Coordenadas no Plano
 Geometria Analítica - Sistemas de Coordenadas no Plano Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Retas e Elipses Turmas E1 e E3 1 / 1 Para denir um sistema de coordenadas no
Geometria Analítica - Sistemas de Coordenadas no Plano Cleide Martins DMat - UFPE Turmas E1 e E3 Cleide Martins (DMat - UFPE) Retas e Elipses Turmas E1 e E3 1 / 1 Para denir um sistema de coordenadas no
Visualização. - Aula 4 -
 Visualização - Aula 4 - Pipeline de visualização 2D window recorte mapeamento viewport descrição geométrica rasterização Visualização de objetos 2D y viewport 1 região (window) 1 região (window) 2 viewport
Visualização - Aula 4 - Pipeline de visualização 2D window recorte mapeamento viewport descrição geométrica rasterização Visualização de objetos 2D y viewport 1 região (window) 1 região (window) 2 viewport
aula9 Coordenadas homogêneas e projeções 2016/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
http://computacaografica.ic.uff.br/conteudocap2.html aula9 P p O Coordenadas homogêneas e projeções 2016/2 IC / UFF 2D TODAS AS Transformações Lineares Bidimensionais São representadas por matrizes 2 x
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Civil + Física 03 de Julho de Prof o. E.T.
 Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Civil + Física 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Civil + Física 0 de Julho de 2014 - Prof o ETGalante 1 (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo O ponto M
Vectores e Geometria Analítica
 Capítulo 1 Vectores e Geometria Analítica 1.1 Vectores em R 2 e R 3. Exercício 1.1.1 Determine um vector unitário que tenha a mesma direcção e sentido que o vector u e outro que que tenha sentido contrário
Capítulo 1 Vectores e Geometria Analítica 1.1 Vectores em R 2 e R 3. Exercício 1.1.1 Determine um vector unitário que tenha a mesma direcção e sentido que o vector u e outro que que tenha sentido contrário
n. 18 Estudo da reta: ângulo, paralelismo, ortogonalidade, coplanaridade e interseção entre retas Ângulo entre duas retas
 n. 18 Estudo da reta: ângulo, paralelismo, ortogonalidade, coplanaridade e interseção entre retas Ângulo entre duas retas Sejam as retas r1, que passa pelo ponto A (x1, y1, z1) e tem a direção de um vetor
n. 18 Estudo da reta: ângulo, paralelismo, ortogonalidade, coplanaridade e interseção entre retas Ângulo entre duas retas Sejam as retas r1, que passa pelo ponto A (x1, y1, z1) e tem a direção de um vetor
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Ambiental 03 de Julho de Prof o. E.T.Galante
 Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Ambiental 03 de Julho de 2014 - Prof o. E.T.Galante 1. (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo. O ponto M
Universidade Federal de Mato Grosso do Sul - UFMS VGA - 2 a Prova - Engenharia Ambiental 03 de Julho de 2014 - Prof o. E.T.Galante 1. (2,0 pontos) Na gura acima ABCDEF GH é um paralelepípedo. O ponto M
Figura 9.1: Corpo que pode ser simplificado pelo estado plano de tensões (a), estado de tensões no interior do corpo (b).
, estado de tensões no interior do corpo (b).") 9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
9 ESTADO PLANO DE TENSÕES E DEFORMAÇÕES As tensões e deformações em um ponto, no interior de um corpo no espaço tridimensional referenciado por um sistema cartesiano de coordenadas, consistem de três componentes
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 07 - modelos de câmera Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos matriz de calibração câmera finita câmera projetiva
Processamento de Imagens CPS755 aula 07 - modelos de câmera Antonio Oliveira Ricardo Marroquim 1 / 32 laboratório de processamento de imagens tópicos matriz de calibração câmera finita câmera projetiva
Geometria Analítica - Aula
 Geometria Analítica - Aula 19 246 IM-UFF K. Frensel - J. Delgado Aula 20 Vamos analisar a equação Ax 2 + Cy 2 + Dx + Ey + F = 0 nos casos em que exatamente um dos coeficientes A ou C é nulo. 1. Parábola
Geometria Analítica - Aula 19 246 IM-UFF K. Frensel - J. Delgado Aula 20 Vamos analisar a equação Ax 2 + Cy 2 + Dx + Ey + F = 0 nos casos em que exatamente um dos coeficientes A ou C é nulo. 1. Parábola
Introdução ao Processamento e Síntese de imagens Recorte 2D
 1 Introdução ao Processamento e Síntese de imagens Recorte 2D Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Traina, A. J. M. & Oliveira, M. C. F. (2004) 2016 2 Recorte - (Clipping) Numa
1 Introdução ao Processamento e Síntese de imagens Recorte 2D Fontes: Rogers, D. F. Procedural Elements for Computer Graphics Traina, A. J. M. & Oliveira, M. C. F. (2004) 2016 2 Recorte - (Clipping) Numa
Transformações Geométricas
 Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
Transformações Geométricas 2D Carolina Watanabe Referências Bibliográficas FOLEY, J. D, DAM, A. V.; HUGHES, J. F. Computer Graphics Principle and dpractice, 2 a edição Material elaborado por Marcela X.
Projeções: conceitos. Projetar pontos no espaço d dimensional no plano d-1 dimensional, usando um ponto especial chamado centro de projeção
 Projeções Projeções: conceitos Projetar pontos no espaço d dimensional no plano d-1 dimensional, usando um ponto especial chamado centro de projeção Pontos no espaço 3D projetados em um plano 2D centro
Projeções Projeções: conceitos Projetar pontos no espaço d dimensional no plano d-1 dimensional, usando um ponto especial chamado centro de projeção Pontos no espaço 3D projetados em um plano 2D centro
aula6 Projeções Planas 2017/2 IC / UFF
 http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
http://computacaografica.ic.uff.br/conteudocap2.html aula6 P p O Projeções Planas 2017/2 IC / UFF Relembrando Transformações De corpo rígido (semelhança). Distância entre 2 pontos quaisquer é inalterada.
Álgebra Linear I - Aula 6. Roteiro
 Álgebra Linear I - Aula 6 1. Equação cartesiana do plano. 2. Equação cartesiana da reta. 3. Posições relativas: de duas retas, de uma reta e um plano, de dois planos. Roteiro 1 Equação cartesiana do plano
Álgebra Linear I - Aula 6 1. Equação cartesiana do plano. 2. Equação cartesiana da reta. 3. Posições relativas: de duas retas, de uma reta e um plano, de dois planos. Roteiro 1 Equação cartesiana do plano
Escola Secundária de Alberto Sampaio Ficha Formativa de Matemática A Geometria IV Paralelismo e perpendicularidade. Sistemas de equações.
 Escola Secundária de Alberto Sampaio Ficha Formativa de Matemática A Geometria IV Paralelismo e perpendicularidade. Sistemas de equações. 11º Ano Paralelismo e perpendicularidade de retas No espaço, duas
Escola Secundária de Alberto Sampaio Ficha Formativa de Matemática A Geometria IV Paralelismo e perpendicularidade. Sistemas de equações. 11º Ano Paralelismo e perpendicularidade de retas No espaço, duas
Universidade Federal do Pará Curso de Licenciatura em Matemática PARFOR Lista de Exercícios Referentes a Prova Substitutiva de Geometria Analítica
 1 Universidade Federal do Pará Curso de Licenciatura em Matemática PARFOR Lista de Exercícios Referentes a Prova Substitutiva de Geometria Analítica 1. Determine a distância entre os pontos A(-2, 7) e
1 Universidade Federal do Pará Curso de Licenciatura em Matemática PARFOR Lista de Exercícios Referentes a Prova Substitutiva de Geometria Analítica 1. Determine a distância entre os pontos A(-2, 7) e
Apontamentos III. Espaços euclidianos. Álgebra Linear aulas teóricas. Lina Oliveira Departamento de Matemática, Instituto Superior Técnico
 Apontamentos III Espaços euclidianos Álgebra Linear aulas teóricas 1 o semestre 2017/18 Lina Oliveira Departamento de Matemática, Instituto Superior Técnico Índice Índice i 1 Espaços euclidianos 1 1.1
Apontamentos III Espaços euclidianos Álgebra Linear aulas teóricas 1 o semestre 2017/18 Lina Oliveira Departamento de Matemática, Instituto Superior Técnico Índice Índice i 1 Espaços euclidianos 1 1.1
Instituto Tecnológico de Aeronáutica. Prof. Carlos Henrique Q. Forster Sala 121 IEC. Luiz Felipe Simões Hoffmann
 CCI 36 Computação Gráfica OpenGL Parte 2 Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC Luiz Felipe Simões Hoffmann Tópicos da Aula - Índices - Transformações Geométricas
CCI 36 Computação Gráfica OpenGL Parte 2 Instituto Tecnológico de Aeronáutica Prof. Carlos Henrique Q. Forster Sala 121 IEC Luiz Felipe Simões Hoffmann Tópicos da Aula - Índices - Transformações Geométricas
NOTAS DE AULAS GEOMETRIA DESCRITIVA
 NOTAS DE AULAS DE GEOMETRIA DESCRITIVA O A B C D E F 2º diedro P 2 PVS P 1º diedro PHA P 0 PHP P 1 PVI 3º diedro 4º diedro PROF. LUIZ ANTONIO DE MORAIS 2003 1) Introdução A Geometria descritiva foi criada
NOTAS DE AULAS DE GEOMETRIA DESCRITIVA O A B C D E F 2º diedro P 2 PVS P 1º diedro PHA P 0 PHP P 1 PVI 3º diedro 4º diedro PROF. LUIZ ANTONIO DE MORAIS 2003 1) Introdução A Geometria descritiva foi criada
0 < c < a ; d(f 1, F 2 ) = 2c
 = 2c") Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Capítulo 14 Elipse Nosso objetivo, neste e nos próximos capítulos, é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Para isso, deniremos,
Projeções. Cap 2 (do livro texto) Aula 6 UFF
 Aula 6 UFF") Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Projeções Cap 2 (do livro texto) Aula 6 UFF - 2014 Projeções PLANAS: Classificação BÁSICA: B Características: Um objeto no espaço o 3D A forma mais simples de representar um objeto 3D em 2D é simplesmente
Transformações Geométricas
 Computação Gráfica Interativa - M. Gattass & L. F. Martha 8// Transformações Geométricas por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando Martha para a disciplina CIV8
Computação Gráfica Interativa - M. Gattass & L. F. Martha 8// Transformações Geométricas por Marcelo Gattass Departamento de Informática PUC-Rio (adaptado por Lui Fernando Martha para a disciplina CIV8
Lista 4 com respostas
 Lista 4 com respostas Professora Nataliia Goloshchapova MAT0 - semestre de 05 Exercício. Estude a posição relativa das retas r e s. (a) r : X = (,, ) + λ(,, ), s : (b) r : x y z = x y = 5 x + y z = 0,
Lista 4 com respostas Professora Nataliia Goloshchapova MAT0 - semestre de 05 Exercício. Estude a posição relativa das retas r e s. (a) r : X = (,, ) + λ(,, ), s : (b) r : x y z = x y = 5 x + y z = 0,
Processamento de Imagens CPS755
 Processamento de Imagens CPS755 aula 09 - single-view final Antonio Oliveira Ricardo Marroquim 1 / 25 laboratório de processamento de imagens tópicos pontos e retas de fuga métricas afim em uma foto calibrando
Processamento de Imagens CPS755 aula 09 - single-view final Antonio Oliveira Ricardo Marroquim 1 / 25 laboratório de processamento de imagens tópicos pontos e retas de fuga métricas afim em uma foto calibrando
1. Seja θ = ang (r, s). Calcule sen θ nos casos (a) e (b) e cos θ nos casos (c) e (d): = z 3 e s : { 3x + y 5z = 0 x 2y + 3z = 1
. Calcule sen θ nos casos (a) e (b) e cos θ nos casos (c) e (d): = z 3 e s : { 3x + y 5z = 0 x 2y + 3z = 1") 14 a lista de exercícios - SMA0300 - Geometria Analítica Estágio PAE - Alex C. Rezende Medida angular, distância, mudança de coordenadas, cônicas e quádricas 1. Seja θ = ang (r, s). Calcule sen θ nos casos
14 a lista de exercícios - SMA0300 - Geometria Analítica Estágio PAE - Alex C. Rezende Medida angular, distância, mudança de coordenadas, cônicas e quádricas 1. Seja θ = ang (r, s). Calcule sen θ nos casos
Lista 3: Geometria Analítica
 Lista 3: Geometria Analítica A. Ramos 25 de abril de 2017 Lista em constante atualização. 1. Equação da reta e do plano; 2. Ângulo entre retas e entre planos. Resumo Equação da reta Equação vetorial. Uma
Lista 3: Geometria Analítica A. Ramos 25 de abril de 2017 Lista em constante atualização. 1. Equação da reta e do plano; 2. Ângulo entre retas e entre planos. Resumo Equação da reta Equação vetorial. Uma
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I Gabarito da 2 a Prova - 1 o semestre de 2015
 MAT27 ÁLGEBRA LINEAR PARA ENGENHARIA I Gabarito da 2 a Prova - 1 o semestre de 201 Nesta prova considera-se fixada uma orientação do espaço e um sistema de coordenadas Σ (O, E) em E 3, em que E é uma base
MAT27 ÁLGEBRA LINEAR PARA ENGENHARIA I Gabarito da 2 a Prova - 1 o semestre de 201 Nesta prova considera-se fixada uma orientação do espaço e um sistema de coordenadas Σ (O, E) em E 3, em que E é uma base
Computação Gráfica. Prof. MSc. André Yoshimi Kusumoto
 Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Para que objetos tridimensionais possam ser visualizados é necessário que suas imagens sejam geradas na tela. Para isso,
Computação Gráfica Prof. MSc. André Yoshimi Kusumoto andrekusumoto.unip@gmail.com Para que objetos tridimensionais possam ser visualizados é necessário que suas imagens sejam geradas na tela. Para isso,
Álgebra Linear I - Aula 10. Roteiro
 Álgebra Linear I - Aula 10 1. Distância entre duas retas. 2. A perpendicular comum a duas retas. 3. Posições relativas. Roteiro 1 Distância entre duas retas r e s Calcularemos a distância entre duas retas
Álgebra Linear I - Aula 10 1. Distância entre duas retas. 2. A perpendicular comum a duas retas. 3. Posições relativas. Roteiro 1 Distância entre duas retas r e s Calcularemos a distância entre duas retas
PMR2560 Visão Computacional Visão estéreo. Prof. Eduardo L. L. Cabral
 PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
PMR2560 Visão Computacional Visão estéreo Prof. Eduardo L. L. Cabral Objetivos Introdução Equações básicas Processo de correspondência Geometria epipolar Retificação de imagens Reconstrução 3D Visão estéreo
Aula Elipse. Definição 1. Nosso objetivo agora é estudar a equação geral do segundo grau em duas variáveis:
 Aula 18 Nosso objetivo agora é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Vamos considerar primeiro os casos em que B = 0. Isto é,
Aula 18 Nosso objetivo agora é estudar a equação geral do segundo grau em duas variáveis: Ax + Bxy + Cy + Dx + Ey + F = 0, onde A 0 ou B 0 ou C 0 Vamos considerar primeiro os casos em que B = 0. Isto é,
Cálculo 3 Primeira Avaliação (A) 25/08/2016
 25/08/2016") Cálculo 3 Primeira Avaliação A) 25/08/2016 Nome / Matrícula: / Turma: AA Nota: de 4 pontos) 1. 1 ponto) Determine a equação do plano que é: perpendicular ao plano que passa pelos pontos 0, 1, 1), 1, 0,
Cálculo 3 Primeira Avaliação A) 25/08/2016 Nome / Matrícula: / Turma: AA Nota: de 4 pontos) 1. 1 ponto) Determine a equação do plano que é: perpendicular ao plano que passa pelos pontos 0, 1, 1), 1, 0,
Aula9 e 10. Projeções Planas. Como representar objetos 3D em dispositivos 2D? 2019/1 IC / UFF. Paginas 91 a 101 livro texto de computacao grafica
 Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
Aula9 e 10 Como representar objetos 3D em dispositivos 2D? Projeções Planas 2019/1 IC / UFF P p O Paginas 91 a 101 livro texto de computacao grafica Como desenhar o mundo 3D no planos? Fazendo as projeções
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de f 1 = 2 e 1 e 2 e 3,
 MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de 2015 1 Sendo E = { e 1 e 2 e 3 } F = { f 1 f 2 f 3 } bases com: f 1 = 2 e 1 e 3 f 2 = e 2 + 2 e 3 f 3 = 7 e 3 e w = e
MAT2457 ÁLGEBRA LINEAR PARA ENGENHARIA I 2 a Lista de Exercícios - 1 o semestre de 2015 1 Sendo E = { e 1 e 2 e 3 } F = { f 1 f 2 f 3 } bases com: f 1 = 2 e 1 e 3 f 2 = e 2 + 2 e 3 f 3 = 7 e 3 e w = e