UNIVERSIDADE ESTADUAL DE MARINGÁ CENTRO DE TECNOLOGIA DEPARTAMENTO DE INFORMÁTICA PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO
|
|
|
- Débora Figueira Fernandes
- 8 Há anos
- Visualizações:
Transcrição
1 UNIVERSIDADE ESTADUAL DE MARINGÁ CENTRO DE TECNOLOGIA DEPARTAMENTO DE INFORMÁTICA PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DA COMPUTAÇÃO CARLOS FRANSLEY SCATAMBULO COSTA Uma solução de nó sensor sem fio para monitoração de anfíbios anuros e seu habitat Maringá 2011

2 CARLOS FRANSLEY SCATAMBULO COSTA Uma solução de nó sensor sem fio para monitoração de anfíbios anuros e seu habitat Dissertação apresentada ao Programa de Pós Graduação em Ciência da Computação do Departamento de Informática, Centro de Tecnologia da Universidade Estadual de Maringá, como requisito parcial para obtenção do título de Mestre em Ciência da Computação. Orientadora: Prof a. Dr a. Linnyer Beatrys Ruiz Aylon Maringá 2011

3 "Dados Internacionais de Catalogação-na-Publicação (CIP)" (Biblioteca Setorial - UEM. Nupélia, Maringá, PR, Brasil) C837u Costa, Carlos Fransley Scatambulo, Uma solução de nó sensor sem fio para monitoração de anfíbios anuros e seu habitat / Carlos Fransley Scatambulo Costa. -- Maringá, f. : il. (algumas color.). Dissertação (mestrado em Ciência da Computação)--Universidade Estadual de Maringá, Dep. de Informática, Orientador: Prof.ª Dr.ª Linnyer Beatrys Ruiz Aylon. 1. Rede de sensores sem fio - Arquitetura. 2. Rede de sensores sem fio - Comunicação. 3. Computação autonômica. 4. Computação ubíqua. 5. Wireless sensor networks. I. Universidade Estadual de Maringá. Departamento de Informática. Programa de Pós-Graduação em Ciência da Computação. CDD 22. ed NBR/CIP AACR/2 Maria Salete Ribelatto Arita CRB 9/858 João Fábio Hildebrandt CRB 9/1140

4

5 AGRADECIMENTOS Sei que palavras nem sempre conseguem expressar a magnitude, a imensidão de nossos pensamentos e sentimentos. Porém, singelamente peço licença para registrar aqui o meu mais profundo agradecimento e reconhecimento pelos esforços e manifestações de apoio e carinho de tantas pessoas que contribuíram, direta ou indiretamente, para a concretização deste sonho. Primeiramente, a Deus Pai, Deus Filho e Deus Espírito Santo, por tudo que são diante de qualquer situação, por olharem para minha imperfeita condição humana e, mesmo assim, me agraciarem com tantas e perfeitas bênçãos, presentes, força, inteligência, paz e amor! A toda minha família, parentes e amigos, pelas orações, força, momentos de descontração, palavras e gestos de carinho e compreensão. São a minha vida, meu motivo de existência, de perseverança. Em especial, a minha linda e abençoada esposa Josy (meu porto seguro), meus amados e maravilhosos filhos Guilherme e Vinícius, que ainda está por chegar, amo muito vocês!!! A minha orientadora, profa. dra. Linnyer Beatrys, por sua personalidade e posicionamento perante as diversas situações de meu mestrado. Agradeço aos ensinamentos, direcionamentos, desafios impostos, ao saber científico adquirido e pela construção de meu perfil enquanto pesquisador, cientista e retransmissor de conhecimento. Aos demais professores do programa, por todo ensinamento e por me ajudarem a ser um profissional melhor. Um abraço especial à Inês, secretária do mestrado, por toda ajuda, por cuidar de nossos compromissos e prazos, enquanto mestrandos, e por todas as conversas de corredor. Ao professor Paulo Gonçalves, por ter me guiado por este mestrado. Por ter sido, mesmo que não devidamente documentado, meu co-orientador, por toda transferência de conhecimento, pelos equipamentos emprestados e por toda paciência com minha falta de conhecimento. Aos amigos e colegas de mestrado, pelos momentos em conjunto, pelas conversas de cantina, pelos cafés, pelas madrugadas em claro, pelas risadas, pelas lágrimas, pelas vitórias que todos alcançamos juntos. Aos colegas do Grupo Manna. A convivência com vocês também ajudou a tornar-me uma pessoa melhor! Ao meu amigo Juliano Foleiss que, tão simples e humildemente, ajudou-me a solucionar questões críticas de meu projeto, sob um olhar que eu não dominava. Por todo seu conhecimento, pelos dias e noites que esteve comigo no laboratório, ajudando em minha pesquisa, por sua alegria e descontração! Ao colega de pesquisa Prashanth G. Reddy, da Electrical and Computer Engineering - Cleveland State University - USA, por solucionar diversas dúvidas em meu projeto. Aos senhores professores membros constituintes de minha banca examinadora, por suas palavras, considerações e contribuições na melhoria de meu projeto e na minha evolução, enquanto colega de trabalho e cientista. Às agências Fundação Araucária de Apoio ao Desenvolvimento Científico e Tecnológico do Paraná, Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq) e ao Instituto Nacional de Ciência e Tecnologia de Sistemas Micro e Nanoeletrônicos (INCT - NAMITEC), por todo apoio e suporte financeiro. Enfim, obrigado a todos por toda ajuda e contribuição para a consolidação deste trabalho. O que a mente possa vir a esquecer, o coração e Deus jamais esquecerão. Que Ele, poderosamente e grandiosamente, desça sobre todos as graças, bênçãos e alegrias vindas do céu para as suas, para as nossas vidas! Louvado seja Nosso Senhor Jesus Cristo... Para que sempre seja Louvado, amém!!! A todos, gostaria de deixar estas Palavras bíblicas: Hebreus 10, / Salmos, 90.

6 Uma solução de nó sensor sem fio para monitoração de anfíbios anuros e seu habitat RESUMO Os desafios encontrados por pesquisadores na aquisição de dados ambientais e na monitoração e identificação de espécies em ambientes vivos é, em via de regra, um processo longo e custoso. Isso estimula o desenvolvimento de tecnologias como a de Rede de Sensores Sem Fio (RSSF) e, em especial, das Redes de Sensores Multimídia Sem Fio (RSMSF). Essas redes são de importância para este trabalho que tem por objetivos desenvolver uma solução de nó sensor sem fio e uma RSMSF aplicada ao reconhecimento acústico animal e monitoração ambiental, em particular a monitoração de anfíbios anuros. Estes animais possuem grande sensibilidade a mudanças em seu habitat natural assemelhando-se a sensores naturais para indícios de degradação ambiental. Como prova de conceitos, um protótipo constituído a partir de dispositivos comerciais foi proposto. A rede contemplará desde a coleta dos dados (ambientais e da espécie), processamento dos dados até a disponibilização e visualização destas informações em um site para Internet. Aspectos como a utilização otimizada de recursos serão considerados no projeto da rede, devido às suas severas restrições de recursos e de energia por parte dos elementos de rede, pois se pretende deixar esta rede funcionando sem supervisão humana por longos períodos, de meses a anos. Como exemplo, entre os dispositivos de hardware, se fez necessária uma subdivisão de tarefas em: sensoriamento ambiental e processamento dos dados acústicos. Resultados obtidos indicaram um índice de até 100% e de até 50% de acertos na identificação do anuro para amostras de vocalização sem ruído e das mesmas com interferência de ruído de chuva, respectivamente. Palavras-chave: Rede de sensores sem fio. Mana-m. Anuro. Vocalização. Nó sensor. Multimídia. Acústica. Identificação. Monitoração ambiental.

7 A solution of wireless sensor node for amphibian monitoring and their habitat ABSTRACT The challenges encountered by researchers in the acquisition of environmental data and monitoring and identification of species in living environments is, as a rule, a long and expensive process. This stimulate the development of technologies such as Wireless Sensor Network (WSN), and in particular of Wireless Multimedia Sensor Networks (WMSN). These networks are important for this work which aims to develop a solution for wireless sensor node and a WMSN applied to the environmental monitoring and animal acoustic recognition, particularly monitoring of amphibians. These animals are highly sensitive to changes in their natural habitats resembling the natural sensors for evidence of environmental degradation. As proof of concept, a prototype consisting starting at commercial devices is proposed. The network will cover from the collection of data (environmental and species), data processing and visualization to the availability of this information in an Internet site. Aspects such as the optimum utilization of resources will be considered in the design of the network, due to their severe resource constraints and energy on the part of the network elements, because pretend itself to leave this network operating without human supervision for long periods, of months to years. As an example, among the hardware devices, was necessary a subdivision of tasks: environmental sensing and processing of acoustic data. Results showed a rate of up to 100% and 50% accuracy in identifying the amphibian for samples of vocalization without noise and others with noise interference of rain, respectively. Keywords: Wireless sensor networks. Mana-m. Amphibian. Vocalization. Sensor node. Multimedia. Acoustic. Identification. Environmental monitoring.

8 LISTA DE FIGURAS 2.1 Microestação SensorScope (esq.) e detalhe dos dispositivos colocados na caixa hermética (centro). Disposição das microestações na cadeia de montanhas (dir.) Encapsulamento do nó sensor e sensores Nó sensor próximo ao ninho (esq.) e dentro do tubo PVC (centro). Colocação da etiqueta RFID O nó sensor ExScal Representação lógica de uma RSSF M 2 para monitoração ambiental Arquitetura do sistema hierárquico (Stargate + Mica2) multicamada para processamento de dados acústicos Diagrama de blocos da arquitetura Lakon (esq.) e vista superior do protótipo do mote (dir.), destacando o núcleo Epic e o microcontrolador AVR Principais componentes de um nó sensor a)mica2, b)micaz e c)imote2, ambos da Crossbow Nós sensores Firefly e SPEC Fleck3B e Fleck Nano Plataformas ēko, e Waspmote Plataformas BTnode e SquidBee (Open Mote) Arquitetura de Referência de uma Rede de Sensores Multimídia Sem Fio Processo de captura, digitalização e devolução do som para o ambiente Aplicações de Processamento Digital de Sinais MicaZ, com placa sensora MTS310CA, e Alvidi AL-UC3BMB, com AVR Diagrama de blocos do nó sensor Mana-M Diagrama do nó-base conectado a um computador PC Versão do microcontrolador com 64 pinos, 44 GPIO Versão do microcontrolador com 48 pinos, 28 GPIO Diagrama de blocos do microcontrolador AVR32-UC3B Fluxograma de execução do algoritmo de identificação de anuro, iniciando com a leitura do ADC e finalizando com a resposta ao processamento Imagens de duas telas da ferramenta de acompanhamento da monitoração da área de interesse Perereca-de-olhos-vermelhos Espectrograma e waveform de uma amostra, sem ruído, registrado por meio do programa SonicVisualiser Consumo de energia em modo idle/sleep, em µa Consumo de energia em modo transmissão/recepção, em ma Relacionamento do consumo de energia entre transmissão e processamento dos dados
 multicamada para processamento de dados acústicos.......................... 26 2.7 Diagrama de blocos da arquitetura Lakon (esq.")
9 LISTA DE TABELAS 3.1 Tabela comparativa dos nós sensores Características de configuração da série UC3B Interpretação do risco de incêndio obtido pelo Índice de Angstrom A.1 Operações aritméticas A.2 Operações de multiplicação A.3 Operações DSP A.4 Operações A.5 Operações Lógicas A.6 Operações Bit A.7 Operações Move/Load Imediato A.8 Operações Fluxo de Instrução A.9 Dados Múltiplos A.10 Operações Load/Store A.11 Sistema/Controle A.12 Instruções para auxiliar a execução Java (Card) A.13 Instruções ler-modificar-escrever memória A.14 Interface Coprocessador A.15 Operações SIMD

10 LISTA DE ABREVIATURAS E SIGLAS ADC: DAC: DFT: DSP: FFT: GDI: GPRS: GPS: GSM: MAC: MANA-M: MANET: MEMS: PDA: PVC: RFID: RSMSF: RSSF: SQL: TI: Analog to Digital Converter Digital to Analog Converter Discrete Fourier Transform Digital Signal Processing Fast Fourier Transform Great Duck Island General Packet Radio Service Global Position Satellite Global System for Mobile Communications Media Access Control Manna Acoustic Node for Amphibian Monitoring Mobile Ad Hoc Network Micro-electro-mechanical System Personal Digital Assistant Polyvinyl Chloride Radio Frequency Identification Rede de Sensores Multimidia Sem Fio Rede de Sensores Sem Fio Structured Query Language Texas Instruments

11 SUMÁRIO Lista de Figuras 7 Lista de Tabelas 8 Lista de Abreviaturas e Siglas 9 1 Introdução Motivação Objetivos Contribuições Organização do Texto Trabalhos Relacionados Monitoração Climática Monitoração Animal e Reconhecimento de Espécie Reconhecimento de Padrão Vocal Humano Considerações Finais Rede de Sensores Sem Fio, Processamento Digital de Sinais e Monitoração Ambiental Rede de Sensores Sem Fio Hardware para RSSF Sistemas Operacionais para RSSF Plataformas de Nós Sensores Sem Fio Protocolos de Comunicação Aspectos de Projeto em RSSF Rede de Sensores Multimídia Sem Fio Processamento Digital de Sinais: Conceitos Transformada Rápida de Fourier Wavelets Monitoração Ambiental Monitoração e Idenficação de Anuros Ecologia Acústica Considerações Finais O desenvolvimento do nó sensor Mana-M Protótipo do Nó Sensor Proposto Aspectos do Hardware Aspectos do Software Descrição do Algoritmo de Identificação de Espécie Ferramenta de Acompanhamento Considerações Finais Implementação e Resultados Implementação e Estudo de Caso Cenário Cenário

12 5.1.3 Cenário Parâmetros para realização da FFT Resultados e Discussões Conclusões e Trabalhos Futuros Conclusões Trabalhos Futuros Reconhecimentos Referências 93 Anexo A 104

13 12 CAPÍTULO 1 Introdução Rede de Sensores Sem Fio (RSSF) é um tipo especial de rede ad hoc composta de centenas a milhares de elementos de redes chamados de nós sensores que podem ser depositados sobre áreas remotas ou hostis e formarem uma rede sem fio auto-organizada que coleta dados do ambiente ou parâmetros específicos e os envia, em um esquema multi hop, até um ou mais pontos de coleta (os nós sorvedouros) (Akyildiz et al., 2007; Hu et al., 2009; Yick et al., 2008). Os nós sensores são apontados como uma nova classe computacional por sua capacidade analítica, sua ubiquidade e projeto ultra low power de dimensões muito pequenas na escala micro e nano. As RSSF têm sido projetadas para diversos tipos de aplicações tais como militar, médica, biológica, ambiental, civil, entre outras (Boggia et al., 2008; Huang et al., 2009; Kew e Jeong, 2009; Moore, 2008; Yick et al., 2008). O advento de novas tecnologias e a diminuição nos custos de produção de dispositivos de hardware proporcionam que novas possibilidades e funcionalidades sejam agregadas às RSSF. Essa nova tecnologia permite que o conteúdo multimídia seja extraído de ambientes, como áudio, vídeo e imagem, favorecendo o desenvolvimento de Redes de Sensores Multimídia Sem Fio (RSMSF) (Akyildiz et al., 2007; Fernández-Luque et al., 2009).

14 13 Este trabalho lida com o desafio de propor uma RSMSF para monitoração de anfíbios anuros e seu habitat. O foco do trabalho está na proposição de uma solução de nó sensor capaz de coletar dados acústicos, em particular vocal dos anuros, processar esses dados e identificar a espécie. A solução também inclui a monitoração de variáveis ambientais, quais sejam temperatura, pressão atmosférica, umidade e luminosidade. 1.1 Motivação As preocupações relacionadas à preservação e à conservação do meio ambiente assumem, cada vez mais, importância nas discussões entre pesquisadores, institutos de pesquisas, organizações governamentais e não-governamentais e demais iniciativas públicas e privadas, em especial, relacionadas às poucas reservas naturais nativas existentes em todo o mundo. O Brasil é um dos poucos países a manter algumas de suas áreas de florestas nativas sem a exploração humana, preservando uma biodiversidade de fauna e flora devida, especialmente, a seus recursos hídricos (Lewinsohn e Prado, 2003). Esses fatores, somados, proporcionam uma alta concentração e diversidade de espécies, tais como de anfíbios anuros (Lima et al., 2006), animais sensíveis às modificações do ecossistema onde habitam tornando-se uma espécie de sensores naturais para a percepção de alterações ambientais. Estudos a respeito de potenciais causas de mortalidade de anfíbios no Brasil, como a proliferação de doenças, uso de pesticidas, mudanças climáticas e espécies invasoras ou introduzidas, ainda são relativamente modestas, fato observado mundialmente (Silvano e Segalla, 2005). Em função de sensibilidade dos anuros, até mesmo a presença humana os incomoda e os ameaça, forçando-os, em alguns casos, a mudarem seus comportamentos e a migrarem para outras áreas onde não se sintam ameaçados (Dodd, 2003; Price et al., 2007). Dentre as técnicas utilizadas por pesquisadores para investigar a ocupação, ou não, de uma determinada área por anuros, a mais comum consiste no deslocamento de equipes de pesquisadores até sítios de interesse e seu estabelecimento no local por um período de tempo. Dados ambientais são coletados localmente, como temperatura, umidade, luminosidade,

15 14 entre outros, por meio de dispositivos analógicos ou digitais, anotados em planilhas ou em dispositivos móveis, como PDA s (Personal Digital Assistant) e posteriormente armazenados em computadores. Para a identificação das espécies se faz necessário capturar a vocalização dos anuros a distâncias muito próximas dos mesmos, por meio de microfones especiais. Os sons são registrados em gravadores e esses materiais são encaminhados para laboratórios de pesquisa para edição, análise e arquivamento digital. Esse é um processo, em via de regra, longo e custoso (Dodd, 2003; Lima et al., 2006; Silva et al., 2008). Em 2008, o uso de RSSF para monitoração de anfíbios foi considerado um dos grandes desafios da Ciência da Computação para os anos seguintes, em um evento promovido pelas principais entidades de pesquisa da América Latina (Aquino et al., 2008). De acordo com Aquino et al. (2008), há uma crescente quantidade de pesquisas relacionadas à monitoração das populações de anuros, motivos que influenciam no aumento ou declínio dessas populações, descobertas de novas espécies, distribuição geográfica das espécies, entre outros. Razões como as mencionadas anteriormente estimulam o desenvolvimento de um sistema que permita a coleta de dados ambientais locais, como temperatura, umidade e outros, e animais, como a vocalização dos anuros, sem causar qualquer tipo de intrusão, ou perturbação, às espécies de uma determinada área que se deseja monitorar, por longos períodos de tempo. As motivações principais para este trabalho encontram-se na necessidade de desenvolver um protótipo de um nó sensor para o desafio acima apresentado e, também, oferecer subsídios para o desenvolvimento de uma plataforma computacional para redes de sensores sem fio para o mercado nacional brasileiro. 1.2 Objetivos O objetivo deste trabalho é propor o desenvolvimento de um nó sensor para a monitoração de anfíbios anuros em seu habitat natural, com a finalidade de monitoração ambiental e identificação animal. Além disso, pesquisar a viabilidade da utilização de um microcontrolador low power
.")
16 15 de 32 bits, em auxílio ao processamento de sinais acústicos para o reconhecimento automático de espécies. Para isso, é proposta uma RSMSF aplicada à monitoração de anfíbios anuros e, como prova de conceitos, um protótipo de um nó sensor constituído por dispositivos comerciais foi proposto. Em particular, o microcontrolador Atmel AVR32-UC3B (Atmel, 2009d) foi escolhido para análise da vocalização dos anuros, de modo a identificar, automaticamente, uma espécie e adquirir dados ambientais do local em que se encontram, tais como temperatura, pressão atmosférica, umidade relativa do ar, entre outros, para monitoração ambiental e o envio destas informações para um site. Não integram os objetivos deste trabalho o desenvolvimento de novos protocolos de fusão e correlação de dados, ou de roteamento e disseminação de informação para RSMSF. 1.3 Contribuições Este trabalho tem as seguintes contribuições: desenvolvimento de uma RSSF multimídia para monitoração ambiental; disponibilização de uma solução de sensoriamento acústico e monitoração de habitats de anfíbios utilizando RSMSF; estudo da viabilidade na utilização de um microcontrolador de 32 bits em aplicações de RSSF e desenvolvimento de uma solução que permita a obtenção de informações de habitats sem interferência humana e que possibilite detectar alterações ambientais em seu estágio inicial, coletando informações para pesquisadores na preservação de ecossistemas e das populações de anuros.

17 Organização do Texto Esta dissertação está organizada em seis capítulos, na qual, os trabalhos relacionados são apresentados no Capítulo 2, com exemplos de aplicações de monitoração ambiental e de reconhecimento automáticos de padrões acústicos e quais plataformas sensoras e metodologias foram utilizadas. O Capítulo 3 apresenta uma introdução sobre a tecnologia de RSSF, com seus fundamentos, plataformas existentes, aplicações e os desafios e oportunidades de pesquisas, assim como conceitos sobre processamento digital de sinais e descritos os principais requisitos de uma aplicação de RSSF para monitoração ambiental e identificação acústica animal. No Capítulo 4 traz a descrição e as características para a elaboração do nó sensor proposto. No mesmo capítulo são descritos os requisitos, projeto da aplicação de monitoração ambiental e identificação de anuros, os componentes e arquiteturas utilizadas para o desenvolvimento do protótipo. No Capítulo 5 é realizado um estudo de caso em que a RSMSF foi aplicada e a avaliação do sistema proposto e uma discussão sobre os resultados alcançados. Por fim, no Capítulo 6 são feitas as conclusões obtidas com a implementação do modelo proposto e uma breve discussão sobre trabalhos futuros.

18 17 CAPÍTULO 2 Trabalhos Relacionados Na literatura é possível encontrar exemplos de aplicações de RSSF para monitoração ambiental, rastreamento animal e de reconhecimento automático de espécies. Neste capítulo serão apresentados exemplos destas aplicações que foram alvo de estudo e serviram de suporte para o desenvolvimento desta pesquisa. Os trabalhos foram agrupados em seções de modo que a Seção 2.1 apresenta os trabalhos relacionados à monitoração climática, a Seção 2.2 apresenta os trabalhos sobre monitoração, rastreamento e identificação de aves e anuros e a Seção 2.3 apresenta um modelo de nó sensor para reconhecimento de padrão vocal humano, seguido pelas considerações finais. 2.1 Monitoração Climática O projeto SensorScope (Barrenetxea et al., 2008) é um esforço coletivo de pesquisadores das áreas ambiental e computacional para construção de uma solução completa, baseada em RSSF, para monitoração ambiental, com custo inferior (1.000,00 e) as atuais estações climáticas disponíveis no mercado (60.000,00 e). Cada estação é composta por um suporte de alumínio,


19 18 painel solar, sete sensores externos e uma caixa hermética para acomodação dos componentes eletrônicos do nó sensor TinyNode (Dubois-Ferrière et al., 2006). Para estudo de caso, como pode ser visualizado na Figura 2.1, foram instaladas cerca de 17 estações ao longo da cadeia de montanhas Grand Saint Bernard 1, para monitorar os riscos de avalanches, sendo que apenas a primeira estação (sorvedouro) possuía um módulo General Packet Radio Service (GPRS) para transmissão dos dados coletados pelas demais estações para a estação base. Figura 2.1: Microestação SensorScope (esq.) e detalhe dos dispositivos colocados na caixa hermética (centro). Disposição das microestações na cadeia de montanhas (dir.). Os resultados obtidos, no período de um mês de monitoração, foram tidos como satisfatórios, mesmo com problema de curto-circuito em uma das estações e falhas no software do módulo GPRS, que resultaram na perda de dados de algumas estações. Assim, os autores estudam melhorar o hardware utilizado e adicionar a possibilidade de reprogramar alguns elementos da rede remotamente. O experimento proposto por Tolle et al. (2005) é um estudo de caso de uma RSSF para monitorar o microclima que envolta um tipo específico de árvore, em um sítio florestal. Os nós sensores, modelo Mica2Dot, foram colocados em diferentes alturas na árvore e cada nó foi responsável por medir a temperatura, umidade relativa do ar e radiação solar local. Cada conjunto de nó sensor e sensores foi acondicionado em um cilindro acrílico selado, para proteger as partes eletrônicas das intempéries e permitir o sensoriamento das variáveis, como pode ser vista na Figura Localizada entre a Suíça e a Itália
 para transmissão dos dados coletados pelas demais estações para a estação base. Figura 2.1: Microestação SensorScope (esq.")

20 19 Figura 2.2: Encapsulamento do nó sensor e sensores. Fonte: Tolle et al.(2005). Os dados foram enviados para o nó gateway Stargate e armazenados sendo, posteriomente, retransmitidos, via GPRS, para uma base de dados fora do sítio de análise. Com a implantação desta aplicação de RSSF no mundo real, biólogos puderam acompanhar os dados sobre as mudanças de gradientes espaciais, entre outras informações, no microclima em torno das árvores daquela região, ajudando na compreensão da dinâmica de diferentes processos daquele ecossistema. Dentre os mais novos modelos de nós sensores, Stefani (2008) apresenta uma solução baseada no nó sensor ēko. O objetivo era fornecer informações sobre a melhor forma para irrigação de vinícolas, monitoração de temperatura e umidade, para evitar o congelamento das uvas e/ou a propagação de bactérias nocivas, controlar bombas e válvulas de água, entre outros. O primeiro protótipo foi criado em 2005, utilizando nós sensores Mica2Dot, mas em 2007 foram substituídos pela nova série ēko Pro de 2,4 GHz, também da Crossbow. Os dados coletados eram enviados para uma estação base, conectada a um computador. A partir do computador foi possível gerar diferentes gráficos relacionados aos parâmetros monitorados e que coincidiam com imagens de satélite, a partir do software ēkoview. Segundo dados e estatísticas pós implantação da rede, a safra dobrou em 2005 comparada a 2004, com o mesmo consumo de água. De 2006 para 2005 e de 2007 para 2006, também houve registros de duplicação da produção. Fatores ambientais ajudaram na melhoria dos resultados, mas também se concluiu que a RSSF contribuiu grandemente para a obtenção

21 20 desse êxito e que ela poderia ser utilizada em outras culturas agrícolas e de monitoração ambiental. Por fim, o protótipo apresentado por Costa et al. (2007) tem por objetivo a monitoração do microclima de uma adega de produção de vinhos. O projeto consistia em implantar uma RSSF, utilizado nós sensores Mica2Dot e Mica2, para monitorar parâmetros de temperatura, umidade, luminosidade e possíveis vibrações no ambiente que pudessem prejudicar o processo de fermentação de vinhos armazenados nas balseiras. A estação base foi composta por um computador com uma placa MIB510CA e um nó Mica2 acoplado a ela, com a função de gateway do sistema. Ambas as plataformas executam o sistema operacional TinyOS e o gateway ainda executa os aplicativos SerialForwarder, para receber os dados da rede, e MoteView 2, para armazenar os dados coletados no banco de dados PostgreSQL 3. Um aplicativo, escrito em linguagem Java, foi desenvolvido para mostrar os dados na tela do computador e enviá-los para um servidor de Internet. Segundo seus autores, alguns itens que visam à eficiência da rede e o funcionamento otimizado dos nós sensores não foram considerados, tais como, fusão de dados, transmissão dos dados por múltiplos saltos, conservação de energia, entre outros. O principal objetivo dos pesquisadores foi aprender o funcionamento da rede e o envio dos dados coletados na adega para uma página na Internet, usando técnicas para o desenvolvimento de uma RSSF e aquisição dos dados ambientais por uma aplicação projetada para funcionar nessa rede. 2.2 Monitoração Animal e Reconhecimento de Espécie Pesquisadores do College of the Atlantic, conduziram uma pesquisa sobre comportamento de uma determinada espécie de ave, durante o período de procriação (aproximadamente de 7 meses), em uma ilha denominada Great Duck Island (GDI), em Maine, Estados Unidos (Suri et al., 2006). 2 SerialForwarder e MoteView fazem parte de um pacote de aplicativos denominado MoteWorks, fornecido pela Crossbow Inc., na aquisição de seus kits de desenvolvimento. 3 Ver Seção 4.1.1
22 21 Para a realização desse estudo, uma RSSF com, aproximadamente, 32 nós sensores foi montada para monitorar variáveis, tais como temperatura, umidade, pressão atmosférica e a presença ou não de aves e filhotes nos ninhos. Para satisfazer os requisitos dos pesquisadores um novo modelo de nó sensor foi projetado, o Mica2Dot. O Mica2Dot é da mesma família dos Mica motes, mas foi projetado em formato circular e com, aproximadamente, o tamanho de uma moeda. Esses nós foram colocados no interior de cada buraco onde havia um ninho de ave e realizavam leituras periodicamente e as enviavam para uma estação base central, na ilha. Da estação base as informações eram repassadas para a Internet, de onde os pesquisadores acessavam os dados da rede em tempo real. Essa pesquisa ajudou a validar tecnologias e procedimentos em RSSF. Inspirados pelo trabalho realizado em GDI, Naumowicz et al. (2008) apresentaram um projeto e implantação de uma RSSF para monitoração de aves marinhas em Skomer Island, Inglaterra. A motivação para monitorar essas aves estava no fato delas permanecerem a maior parte do tempo em mar aberto, especialmente para fins de alimentação. Assim, levantou-se a hipótese de que a existência desta determinada espécie de ave na ilha poderia ser um bom indicativo de qualidade do ecossistema marinho próximo. Para automatizar o processo de monitoração daqueles ninhos foi criada uma RSSF. Os nós sensores eram constituídos de um microcontrolador TI MSP430F1612, rádio Chipcon CC1020 de 868 MHz, sensores de temperatura e umidade. O conjunto foi colocado dentro de um tubo PVC (Polyvinyl Chloride), hermeticamente fechado e parcialmente enterrado próximo aos ninhos. Um par de sensores infravermelho e um sensor de leitura de etiquetas RFID (Radio Frequency Identification) foram colocados dentro dos buracos, para detectar atividade das aves, pelo fato de muitas aves já possuírem um anel de identificação (de pesquisas anteriores) e, sobre esses, foram coladas as etiquetas RFID, como pode ser visto na sequência de imagens apresentadas na Figura 2.3. Os dados coletados eram transmitidos à estação base, que possuía um módulo GPRS, unidade de rádio sem fio g, receptor GPS (Global Position Satellite) e alimentação por

23 22 Figura 2.3: Nó sensor próximo ao ninho (esq.) e dentro do tubo PVC (centro). Colocação da etiqueta RFID. energia captada por um painel solar. A retransmissão dos dados era feita uma vez ao dia, para um servidor principal na ilha. Uma ferramenta (software) auxiliar foi desenvolvida para telefones móveis, baseados em Windows Mobile, e PDA (Personal Digital Assistant), permitindo aos pesquisadores percorrerem a ilha com esses dispositivos e adquirirem dados locais de cada nó sensor, como a identificação de uma ave, por exemplo, por meio de conexão Bluetooth. Mesmo com poucos nós sensores, os resultados obtidos foram satisfatórios, não ocasionando interferência no comportamento e nos hábitos das aves, tão pouco comprometendo o desenvolvimento dos filhotes. Esses resultados serviram para encorajar os pesquisadores a aumentarem o número de ninhos a serem monitorados em etapas futuras. O trabalho descrito por Moore (2008) apresenta um método de baixo custo computacional para uma RSSF aplicada na detecção da vocalização e identificação de aves, uma vez que a transmissão de fluxos de áudio nessas redes, via rádio, consomem rapidamente os recursos energéticos das mesmas. Para a realização dos experimentos foi utilizado um nó sensor CSIRO Fleck, que teve aclopado em sua placa-mãe um co-processador TMS320F2812 DSP de 32-bits, com 150 MHz de clock, da Texas Instruments, e uma placa de aquisição de áudio. O nó base também foi um Fleck conectado a um computador, via conexão RS-232. O processamento de áudio e a identificação foram realizados pelo co-processador DSP e os resultados transferidos para o processador do nó Fleck, onde eles eram transmitidos ao nó-base. Por sua vez, o nó-base disseminava os resultados para PC, via RS-232, para a ex-

24 23 posição, armazenamento ou processamento futuro. Esta aplicação demonstrou a viabilidade da abordagem proposta, destacando algumas limitações relacionadas a escolha das características e da técnica de modelagem, mas que serão reavaliadas em trabalhos futuros. O uso de RSSF em ambientes reais também foi o foco do trabalho de Gu et al. (2005). Os autores propuseram a criação da VigilNet, uma RSMSF multicamada para vigilância, sem a utilização de nós sensores com grande poder computacional ou com alta demanda de consumo de energia. Para validação da pesquisa foi proposto um sistema de detecção e classificação de veículos, pessoas e de pessoas portando objetos metálicos e o rastreamento desses alvos. A arquitetura de classificação foi do tipo hierárquica (Figura 2.4), cujas tarefas de sensoriamento e computação foram distribuídas aos elementos da rede, em diferentes níveis, num trabalho de colaboração entre os nós sensores. Figura 2.4: O nó sensor ExScal. Fonte: Gu et al. (2005) A rede foi composta por nós sensores ExScal motes (Figura 2.4, esquerda), semelhantes aos Mica2 motes, porém contavam com magnetômetro, microfone e 4 sensores infravermelho integrados à placa principal, que possuía os mesmos processador, memória, rádio do Mica2. As estratégias, metodologias e as avaliações foram apresentadas ao final do trabalho, em conjunto com uma breve discussão sobre algumas questões importantes a respeito do desenvolvimento de sensores e sistemas de classificação para RSSF. Por fim, concluiu-se que o sistema proposto obteve um nível de desempenho muito satisfatório.
25 Lopes (2007) desenvolveu um protótipo de uma RSSF multicamada, multimodal (RSSF 24 M 2 ) para monitoração ambiental e rastreamento de objetos, como animais selvagens em florestas ou intrusos em áreas de segurança. A rede foi organizada em três camadas (Figura 2.5), de modo que a primeira camada foi constituída por nós sensores equipados com sensores infravermelho. O objetivo foi o de detectar a presença de objetos em movimento com emissão de calor, sendo a monitoração constante. Nós equipados com sensores visuais faziam a composição da segunda camada da rede, com a capacidade de identificar os objetos de interesse, segundo características pré-definidas. Coube a terceira camada realizar a tarefa de rastrear o objeto de interesse, à medida que se movimentasse pela região de monitoração. Para a realização dos experimentos foram utilizados nós sensores MicaZ, gateway Stargate e câmera de vídeo CMUcam2 (Lopes, 2007). Figura 2.5: Representação lógica de uma RSSF M 2 para monitoração ambiental. Lopes(2007). Fonte Os resultados, obtidos por simulação, demonstraram que a abordagem multicamada, multimodal e com sensores heterogêneos é muito mais economicamente eficiente, em relação ao consumo energético da rede, quando comparada a uma abordagem com sensores homogêneos, sem implicar em redução da qualidade no serviço de sensoriamento. A introdução, no nordeste da Austrália, de uma espécie de anuro, e os problemas acarretados por esse acontecimento, originou uma série de pesquisas em rastreamento e classificação
26 25 dos mesmos. O texto seguinte descreve uma aplicação de RSSF para monitoração e reconhecimento, automáticos, de espécies de anfíbios anuros (Hu et al., 2009, 2005). Dois protótipos de redes foram concebidos e testados, para o reconhecimento das espécies a partir da vocalização dos mesmos. Os maiores desafios estavam em como processar o alto volume de dados gerados por essa rede, incluindo-se desde a coleta de amostras de áudio do ambiente, o seu processamento e envio até um servidor remoto, gerando um mínimo de tráfego possível na rede e o aproveitamento máximo dos recursos energéticos. O primeiro protótipo foi composto, exclusivamente, por nós Stargate, de elevado custo financeiro e alto consumo energético, porém de alto desempenho (400 MHz, se comparado aos 8 MHz do Mica2). O Stargate, que possuía uma plataforma Mica2 acoplado para a aquisição dos sinais de áudio, realizava a amostragem dos dados acústicos para uma análise do sinal, extraindo, assim, as informações úteis dos espectrogramas utilizadas para a classificação das espécies. No segundo protótipo utilizou-se um modelo heterogêneo e hierárquico de RSSF, no qual o menor nível foi composto por nós Mica2, com menor poder computacional, para a coleta, amostragem (com adaptação do sistema operacional) e compactação dos dados acústicos. Como pode ser observado na Figura 2.6, os dados eram adquiridos pelos Mica2 e depois enviados (compactados) ao nível superior, composto por nós Stargate. O Stargate ficou responsável pela descompactação e análise dos dados, reconhecimento e classificação das espécies, o que possibilitou uma maior abrangência da área monitorada. Testes foram realizados em laboratório e em campo aberto, com 9 amostras de sons exclusivas de sapos e 6 amostras de sons de sapos mesclados ao ambiente. Os sistemas (homogêneo e heterogêneo) detectaram corretamente as 9 amostras exclusivas, mas a versão heterogênea teve um grau maior de dificuldade no reconhecimento das amostras mistas. O algoritmo de compressão alcançou taxas de compressão na ordem de 25% a 45%, em diferentes cenários. A latência encontrada no sistema heterogêneo não causou nenhum problema ou perdas para a finalidade da aplicação, especialmente pelo fato do aumento do custo-benefício que esse sistema proporcionou ao longo de todo desenvolvimento, provando sua eficiência e viabilidade.

27 26 Figura 2.6: Arquitetura do sistema hierárquico (Stargate + Mica2) multicamada para processamento de dados acústicos (Hu et al., 2005) O trabalho anteriormente descrito ainda originou outro estudo. Norteados por exemplos que empregam a teoria da compressão de sensoriamento, Dang et al. (2008) propôs um algoritmo leve para classificação de anuros para ser empregado em dispositivos sensores, tal como o MicaZ. O trabalho afirma que, em geral, diferente da fala humana, as vocalizações dos anuros têm padrões de repetição simples, implicando que a extração de características simples seriam suficientes para classificá-los. Com base nos recursos disponíveis no dispositivo sensor MicaZ, o algoritmo proposto estima o envelope do sinal acústico, a partir de dados amostrados randomicamente a uma taxa de amostragem muito baixa, e compara esse envelope com o do sinal da espécie candidata, sem a utilização de filtros especiais, tipo passa-baixa, por exemplo.

28 27 Entre as vantagens destacam-se a baixa taxa de amostragem requerida, implicando na utilização de dispositivos com baixo poder computacional, não requer timing preciso e utiliza pouco espaço de memória. Testes experimentais mostraram uma eficiência de 90% na classificação de uma determinada espécie de anuro, com apenas 5% de taxa de erro. Porém, esse algoritmo ainda não é totalmente preciso para a detecção e classificação de espécies de anuros, em geral, pois apresentou elevadas taxas de falsos positivos ou falsos negativos em determinadas situações a que foi submetido. No entanto, é um algoritmo funcional, que pode maximizar a vida útil de uma RSSF e minimizar o tempo de classificação. 2.3 Reconhecimento de Padrão Vocal Humano Em Reddy e Sridhar (2010) é apresentada a arquitetura de um mote capaz de realizar processamento de sinais, de alta fidelidade, através de um microcontrolador DSP de 32 bits, atuando como co-processador. Para testes e estudo de caso um protótipo foi construído contendo dois processadores em um mesmo nó sensor. Como pode ser observado na Figura 2.7 a arquitetura Lakon foi estruturada em duas camadas. A camada inferior, chamada de camada de sensoriamento, foi responsável pela coordenação das ações do nó, gerenciamento do sistema de aquisição, processamento e disseminação dos dados e constituída usando-se o núcleo low-power da plataforma Epic (Dutta e Culler, 2008). Figura 2.7: Diagrama de blocos da arquitetura Lakon (esq.) e protótipo do mote (dir.) (Reddy e Sridhar, 2010)
29 28 A segunda camada, chamada de camada de processamento, é responsável pela análise do sinal acústico e resposta do sistema de reconhecimento. É composta pelo microcontrolador Atmel AVR32UC3B, de 32 bits, que implementa instruções DSP em nível de hardware, e pode executar processamento de sinais pelo mote. Ambos compartilham os periféricos do mote, exceto o rádio, controlado exclusivamente pelo processador do núcleo Epic. O projeto ainda contempla o desenvolvimento do software embarcado, compatível com o sistema operacional TinyOS. 2.4 Considerações Finais Este capítulo apresentou uma revisão bibliográfica de aplicações de RSSF e de RSMSF para monitoração ambiental, rastreamento animal e de reconhecimento automático de espécies, focados, em especial, nos esforços para o processamento de dados multimídia por estas redes. Destaca-se que as pesquisas de Hu et al. (2009, 2005) e Reddy e Sridhar (2010) foram as principais fontes inspiradoras deste trabalho. A solução proposta nesta dissertação difere do projeto australiano, Hu et al. (2005), no tocante ao processamento dos sinais acústicos e identificação do anuro integralmente pelo nó sensor que coleta o som, em conjunto ao sensoriamento de variáveis climáticas por este mesmo nó. A finalidade será a aquisição de um conjunto de informações que sirva de base para a implementação de uma ferramenta de monitoração ambiental útil para biólogos, ecólogos, entre outros. A arquitetura Lakon (Reddy e Sridhar, 2010), apesar de trabalhar com reconhecimento de padrões vocais humanos e o mesmo microcontrolador objeto de estudo desta dissertação, não utiliza sensores climáticos como os que serão empregados neste trabalho. O trabalho de Naumowicz et al. (2008) contribuiu para buscar correlacionar os dados da monitoração ambiental com a presença de aves marinhas em uma determinada localidade, porém, o mesmo não implementa uma ferramenta de identificação automática e acústica de espécies.
30 29 Este trabalho acena igualmente para algumas observações apontadas no trabalho de Moore (2008), de que é melhor processar do que enviar dados multimídia pela rede. A diferença entre os trabalhos está em monitorar/identificar anuros, utilizando a plataforma sensora MicaZ acoplada ao microcontrolador AVR32, ao invés monitorar/identificar aves, utilizando a plataforma Fleck com o microcontrolador DSP, da Texas Instruments. Outra diferença está na implementação de uma ferramenta para acompanhamento, em tempo real, via Internet. Por fim, todos os trabalhos forneceram subsídios para a tomada de decisões deste projeto e na construção do protótipo proposto pela mesma. Alguns itens, relacionados à qualidade de serviço e eficiência, não foram implementados em sua completude. O capítulo seguinte apresenta os conceitos da tecnologia de Rede de Sensores Sem Fio e de Rede de Sensores Multimídia Sem Fio, assim como as principais plataformas comerciais e da literatura. Apresenta, ainda, uma introdução aos conceitos de processamento digital de sinais, de monitoração ambiental e os principais requisitos de uma aplicação de RSSF para monitoração ambiental e identificação acústica animal.
31 30 CAPÍTULO 3 Rede de Sensores Sem Fio, Processamento Digital de Sinais e Monitoração Ambiental Este capítulo traz uma introdução aos conceitos da tecnologia de Rede de Sensores Sem Fio (RSSF), com seus fundamentos, plataformas existentes, protocolos de comunicação, aspectos de projeto, de hardware e de sistemas operacionais. Traz, ainda, uma introdução aos conceitos de processamento digital de sinais e de monitoração ambiental. Desta forma, este capítulo apresenta na Seção 3.1, sob a forma de uma visão geral, os principais conceitos, aspectos de hardware e de projeto de uma RSSF, assim como das principais plataformas comerciais e da literatura e os protocolos de comunicação empregados no funcionamento da mesma. A Seção 3.2 traz uma breve introdução sobre Rede de Sensores Multimídia Sem Fio (RSMSF), a Seção 3.3 introduz os conceitos de processamento digital de sinais, da utilização da Transformada Rápida de Fourier e uma introdução sobre Wavelets, a Seção 3.4 apresenta os principais requisitos de
32 uma aplicação de RSSF para monitoração ambiental e identificação acústica animal. O capítulo encerra-se com as considerações finais apontadas na Seção Rede de Sensores Sem Fio As RSSF podem ser classificadas como um tipo especial de rede móvel ad hoc (MANET) (Yick et al., 2008), diferente das tradicionais redes de computadores conhecidas. Essas redes não possuem uma infra-estrutura rígida de conexões físicas ou de coordenação, permitindo-as realizar rastreamento, monitoração e, em certo grau, controle de áreas inóspitas e hostis de forma autonômica, poupando a presença efetiva de seres humanos (Loureiro et al., 2003). Os esforços e o rápido crescimento de pesquisas, aliado a elevados investimentos em novas tecnologias, materiais e na miniaturização dos diversos componentes utilizados em uma RSSF, como a dos sistemas micro-eletro-mecânicos (Microelectromechanical Systems, MEMS), promovem seu amplo desenvolvimento e sua utilização em uma diversificada gama de setores (Yick et al., 2008). Uma releitura de conceitos computacionais atuais se faz necessária, tais como a consideração de limitações do hardware e a aplicação final para o desenvolvimento do software, dificuldade em manutenção dos equipamentos, falhas nos dispositivos não são incomuns, que os elementos de rede provêem serviço específico e que executam uma aplicação em comum, de modo cooperativo, entre outros. Isso, porque alguns desses conceitos não são passíveis de aplicação integral de forma direta a este tipo de rede, especialmente devido às severas restrições de recursos impostas aos elementos computacionais que as constituem. As seções a seguir apresentam os aspectos relacionados com a formação de uma RSSF Hardware para RSSF O hardware dos elementos das RSSF são conhecidos como nós sensores. Esses elementos computacionais são formados por uma unidade computacional, unidade de memória, unidade
33 de rádio, uma ou mais unidades sensoras e baterias, abaixo relacionados. Por efeito de complementação, esta seção ainda abordará os conversores de dados. 32 a. Unidades Computacionais: Devido as restrições de energia dos nós sensores, a utilização de um microcontrolador de baixo consumo energético (low power) é essencial. Cabe ao microcontrolador o serviço de processamento e análise dos dados coletados, extraindo informações que sejam úteis para uma determinada aplicação. Em vista dessas restrições, a maioria dos microcontroladores utilizados em RSSF é de baixo poder computacional (8-16 MHz), realizando tarefas triviais como controlar o tempo de leitura dos sensores, por exemplo. Porém, com o advento das novas tecnologias surge no mercado microcontroladores com maior poder computacional, se comparado aos mais utilizados em nós sensores atualmente, e baixo consumo de energia. A seguir são apresentados quatro modelos de microcontroladores comerciais. Atmega128L: Microcontrolador utilizado por muitas plataformas sensoras. Possui frequência de 8 MHz, arquitetura 8-bits, 128 KB de flash ROM, 4 KB de SRAM e ADC de 10-bits. Não possui controlador DMA, não realiza operações em ponto flutuante, consome aproximadamente 8 ma a 8 MHz em modo ativo e é produzido pela Atmel Corporation (Atmel, 2009b; Crossbow, 2009; Nachman et al., 2008) MSP430F1611: Esse microcontrolador possui frequência de 8 MHz, arquitetura 16-bits, 48 KB de flash ROM, 10 KB de SRAM e ADC de 10-bits. Possui controlador DMA e realiza operações em ponto flutuante. Devida a essas características, consome cerca de 1,8 ma a 8 MHz em modo ativo e é fabricado pela Texas Instruments (Dutta et al., 2008; Reddy e Sridhar, 2010) PXA271: Microcontrolador da Intel Research, presente no Imote2 (seção 3.1.3). Possui frequência de 416 MHz e arquitetura de 32-bits ARMv5. Inclui 256kB de SRAM, 32MB de flash e 32MB de SDRAM. Isso o habilita a operar Linux, processar algoritmos de sinais, FFT (ponto flutuante), sendo estes dois últimos realizados em um co-processador DSP. Contudo, a 104 MHz de processamento consome 66 ma de
34 33 energia, enquanto que um Atmega128L consome 8 ma a 8 MHz (Nachman et al., 2008). Atmel AVR32-UC3B: Integrante da atual linha de microcontroladores de 32-bits da Atmel. Possui frequência de 66 MHz, 256 KB de memória Flash, 32 KB de memória SRAM, controlador DMA e ADC de 10-bits, em sua versão UC3B0256 (outras versões variam a quantidade de memória Flash, SRAM e pinagem do microcontrolador). Realiza operações em ponto flutuante e seu fabricante disponibiliza uma biblioteca DSP com cerca de 70 funções pronta, incluindo FFT. Seu consumo a 48 MHz é cerca de 26 ma (Atmel, 2009d; Reddy e Sridhar, 2010). Maiores detalhes serão apresentados na Seção b. Rádio-comunicadores: As unidades de rádio-comunicação para plataformas sensoras necessitam correlacionar, da melhor forma possível, alcance de transmissão e baixo consumo de energia. A literatura comprova que a unidade de rádio de um nó sensor é a grande consumidora dos recursos energéticos do mesmo (Anastasi et al., 2009; Hu et al., 2009; Naumowicz et al., 2008). A seguir são listadas três das principais unidades de rádio utilizadas em nós sensores. CC1000: Este modelo da Texas Instruments possui frequência de banda de 868/916 MHz, com potência de transmissão entre -20 a +5 dbm e raio de alcance externo de até 300 m. Quanto o rádio está transmitindo em máxima potência seu consumo chega a 27 ma, enquanto que no modo de recepção consome 10 ma e em modo sleep consome menos de 1 µa (Crossbow, 2009). CC2420: Outro modelo da Texas Instruments, o CC2420 possui frequência de banda de 2,4 GHz, com potência de transmissão entre -24 a 0 dbm, taxa de transmissão a até 250 kbps e raio de alcance externo de até 100 m. A transmissão em máxima potência consome 17,4 ma, enquanto que em modo de recepção consome 19,2 ma, em mode idle consome 20 µa e em modo sleep consome menos de 1 µa (Crossbow, 2009).
35 34 XBee: Modelo da Digi, o XBee possui frequência de banda de 2,4 GHz, com taxa de transmissão a até 250 kbps e raio de alcance externo de até 100 m. A transmissão em máxima potência (+3 dbm) consome 75 ma, enquanto que em modo de recepção consome 80 ma, em mode idle consome 32 ma e em modo sleep consome menos de 14 ma (Digi, 2010; Stefani, 2008). c. Sensores: Em RSSF, os sensores são responsáveis pelo serviço de sensoriamento dos nós, que consiste em coletar os dados de interesse do ambiente a ser monitorado. Existe uma variedade de sensores disponíveis: térmico, biológico, químico, sonoro, óptico, que podem ser acoplados aos nós (Yick et al., 2008). Como exemplos dos sensores mais comuns em plataformas de nós sensores podem ser citados os presentes nas placas sensoras da família Mica Motes. A placa sensora MTS310CA possui sensores de temperatura, luminosidade, acelerômetro, magnetômetro e microfone. A placa sensora MTS420CA, por sua vez, possui sensores de temperatura, pressão atmosférica, luminosidade, umidade, acelerômetro e GPS, como será visto na Seção d. Baterias: A grande maioria das plataformas sensoras utiliza uma fonte finita e escassa de energia, por muitas vezes compostas por baterias do tipo AA alcalinas, de 1,2 V cada. Em alguns casos utilizam-se painéis solares para que essas baterias sejam recarregadas durante o período de insolação do dia, prolongando o período de tempo útil de cada plataforma sensora e contribuindo para o prolongamento do tempo de utilização da rede (Barrenetxea et al., 2008; Hu et al., 2009; Naumowicz et al., 2008). e. Conversores ADC: Comumente conhecidos como ADC (Analog to Digital Converter) são dispositivos eletrônicos que representam um sinal analógico em um sinal digital interpretável por processadores. A resolução de um conversor indica o número de valores discretos que ele pode produzir sobre um determinado valor analógico. Desta forma, um ADC de 8 bits pode codificar uma entrada analógica em até 2 8 = 256 diferentes níveis. Esses valores podem compreender uma variação entre 0 e 255, ou entre -128 e +127 (Oliveira e Andrade, 2006). Maiores detalhes serão apresentados na Seção 3.3.
36 Sistemas Operacionais para RSSF Os sistemas operacionais (SO s) para RSSF têm como objetivo integrar múltiplos hardwares em uma plataforma de nó sensor. O desafio de integrar e gerenciar esses componentes estende-se desde as características e requisitos peculiares a cada dispositivo até o correto gerenciamento no processamento dos dados desses componentes, incluindo-se as restrições de recursos de energia e as limitações dos próprios dispositivos. Na sequência são apresentados três dos principais SO s utilizados para RSSF (Yick et al., 2008). a. TinyOS: Um dos mais utilizados por diferentes tipos de nós sensores. O TinyOS é um SO de código aberto projetado especialmente para dispositivos com restrição de recursos, tais como baixo consumo de energia, processadores de baixa potência e pouca memória. É um padrão de facto para RSSF. Esse sistema operacional é dirigido a eventos e suporta processadores com arquiteturas 8-bits, com 2 KB de RAM, até processadores 32-bits, com 32 MB de memória RAM ou mais. Sua arquitetura é baseada em componentes, o que permite a reutilização de código por aplicações do usuário, e a interligação de componentes para criação de aplicativos. Essas características permitem ao usuário criar códigos personalizados para lidar com uma grande quantidade de interfaces com o mundo físico (Levis e Gay, 2009). b. MantisOS: Utiliza um modelo de execução baseado em threads, o que permite ao nó sensor intercalar tarefas complexas de maneira eficiente, algo que o TinyOS não implementa. As prioridades são atribuídas as threads utilizando-se da política de escalonamento round robin. Isso permite aos nós intercalar tarefas mais complexas, evitando que uma tarefa demasiadamente longa impeça a execução de outra tarefa relativamente mais curta (Bhatti et al., 2005). c. SOS: Sistema operacional composto por um núcleo principal que gerencia o hardware e administra os recursos disponíveis. Os aplicativos são feitas em módulos que podem ser carregados ou descarregados em tempo de execução, por meio de uma tabela de desvios do sistema. O SOS utiliza um escalonador de tarefas baseado em evento não preemptivo.
, o FreeRTOS (Oliver et al.")
37 Utiliza memória dinâmica, tanto no núcleo quanto nos módulos dos aplicativos, facilitando a programação e aumentando a reutilização de memória temporária. (Han et al., 2005). 36 Outros SO s para plataformas sensoras em RSSF são encontrados na literatura, tais como o Linux embarcado (Hill et al., 2004; Mainwaring et al., 2002), o FreeRTOS (Oliver et al., 2010), o ContikiOS (Paul e Kumar, 2009), o Nut/OS (Btnodes, 2009) e o FOS (Corke, 2008; CSIRO, 2009b) Plataformas de Nós Sensores Sem Fio As principais unidades de um nó sensor são: unidade de processamento, unidade de memória, unidade de armazenamento, unidade de comunicação sem fio, fonte de energia, em geral escassa e finita, e uma ou mais unidades sensoras, como pode ser observado na Figura 3.1. Figura 3.1: Principais componentes de um nó sensor Para a fabricação destes dispositivos é pretendido que, com o passar dos anos e a evolução da tecnologia, tenham seu custo e tamanho reduzidos para centavos e mm 3 por unidade de nó sensor, respectivamente (Akyildiz et al., 2007; Yick et al., 2008). Existe uma variedade de sensores disponíveis: térmico, biológico, químico, óptico, que podem ser acoplados aos nós. Há, também, nós com maior capacidade energética, maior poder computacional, alcance de rádio e que não realizam sensoriamento, denominados gateway (Akyildiz et al., 2007; Yick et al., 2008). Na sequência, são apresentadas algumas plataformas sensoras encontradas na literatura e outras que são comercializadas por empresas especializadas na fabricação das mesmas.
. Atualmente é composta pelos modelos Mica2 e MicaZ, representados pela Figura 3.2 - a) e b), respectivamente, mas já compreendeu os modelos Mica e Mica2.Dot.")
38 37 i. Família Mica Mote: A família Mica foi desenvolvida pela Universidade da Califórnia, Berkeley (USA), em colaboração com a Intel Research e comercializado pela Crossbow Technology (Crossbow, 2009). Atualmente é composta pelos modelos Mica2 e MicaZ, representados pela Figura a) e b), respectivamente, mas já compreendeu os modelos Mica e Mica2.Dot. Diferentes em alguns aspectos tecnológicos empregados, ambos são plataformas low power, utilizam o sistema operacional TinyOS e microcontrolador ATmega128L, de 8 MHz, 128 KB de flash ROM, 4 KB de SRAM e ADC de 10 bits, da Atmel Corporation (Atmel, 2009b), porém o Mica2 tem clock, frequência de banda e taxa de transmissão de dados inferiores ao modelo MicaZ (Crossbow, 2009). ii. Imote2 e Imote2.Net: Plataforma também desenvolvida pela Intel Research e comercializada pela Crossbow Technology. O Imote2 (Figura c)) possui microcontrolador Intel, frequência de transmissão de 2,4 GHz, com taxa de transmissão de dados de até 250 Kbps. Muito superior aos Mica s e excelentes para processamento de imagens e sinais, entre outros. Podem trabalhar com Linux, TinyOS ou SOS. O modelo.net possui o diferencial de conter o firmware.net Micro Framework pré-instalado de fábrica (Crossbow, 2009). Figura 3.2: a)mica2, b)micaz e c)imote2, ambos da Crossbow (Crossbow, 2009) iii. SPEC: Considerado como precursor de uma nova geração de nós sensores, o SPEC (à direita da Figura 3.3) reúne microcontrolador Atmel RISC, 3Kb de memória, dispositivo de comunicação sem fio e portas de uso geral em um único chip com cerca de 5 mm 2. É um dispositivo ultra-low power que executa o sistema operacional TinyOS e terá custo, em larga escala de produção, estimado em aproximadamente 1,00 e(hill et al., 2004).

39 38 iv. FireFly: Plataforma low power de baixo custo (Figura 3.3, esq.), possui o microcontrolador Atmel ATmega 1281 de 16 MHz, memórias RAM de 8 KB e flash de 128 KB. Utiliza rádio da Chipcon, padrão IEEE , para comunicação, possibilitando taxa de transmissão entre 128 kbps e 250 kbps, com frequência de 2.4 GHz e alcance entre 50 e 100 metros. Possui regulador de voltagem, que permite ser alterado de acordo com as características e a operação a ser realizada, sensores de luz, temperatura, som e acelerômetro de 3 eixos (Firefly, 2009), todos executando sobre o sistema operacional TinyOS. Figura 3.3: Nós sensores Firefly (Firefly, 2009) e SPEC (Hill et al., 2004) v. Fleck: Desenvolvido pelo instituto de pesquisa australiano SCIRO (Commonwealth Scientific and Industrial Research Organisation), o Fleck é um conjunto de soluções tecnológicas que abrange desde o desenvolvimento de arquiteturas proprietárias, chamadas Fleck3B e Fleck Nano, até o desenvolvimento de um sistema operacional próprio, o FOS, para executar em nós sensores que, por sua vez, também executam o sistema operacional TinyOS. O Fleck3B é dotado de um microcontrolador ATmega 1281 de 8 MHz, 128 KB de memória de programa, 1 MB de memória flash e EEPROM de 4 KB. O Fleck Nano possui um microcontrolador 8051, EEPROM, acelerômetro de três eixos, um rádio com alcance em ambiente fechado de até 20 m e dimensões muito reduzidas. Entre suas principais aplicações estão o monitoração ambiental, estações meteorológicas automatizadas (Fleck 3B), movimento humano (Fleck Nano), entre outros. São produzidos e comercializados pela The Powercom Group, por intermédio de sua subsidiária Datacall Telemetry (CSIRO, 2009a,b).
 e possui 4 portas de conexão onde podem ser conectados sensores, rádio")
40 39 Figura 3.4: Fleck3B e Fleck Nano (CSIRO, 2009a,b) vi. ēko: Mais novo produto comercializado pela Crossbow, para monitoração, estudos de microclima e pesquisa ambiental. O nó sensor ēko é baseado na plataforma Iris (microcontrolador ATmega 1281 de 16 MHz, memórias RAM de 8 KB e flash de 128 KB) e possui 4 portas de conexão onde podem ser conectados sensores, rádio wireless de a GHz, com alcance de até 450 metros em área aberta. A alimentação é feita por baterias, que podem ser recarregadas por painéis solares. Todo o hardware, exceto os sensores, é acondicionado em pequeno gabinete hermeticamente fechado, pronto para utilização em ambientes externos (Crossbow, 2010). vii. Waspmote: Produzido pela Libelium Comunicaciones Distribuidas S.L., esta plataforma (Figura 3.5) possui microcontrolador ATmega 1281 de 8 MHz, 8 KB de SRAM, 128 KB de memória de programa, EEPROM de 4 KB e SD-Card de 2 GB (Libelium, 2010a). Figura 3.5: Plataformas ēko (Crossbow, 2010), e Waspmote (Libelium, 2010a) viii. BTnode: O BTnode (Figura 3.6, esquerda) foi desenvolvido por dois grupos de pesquisas da ETH Zurich. É uma plataforma autônoma para pesquisas de redes móveis, ad hoc
41 40 e redes de sensores distribuídos. Um detalhe interessante desta plataforma é a de possuir dois padrões de rádios diferentes. Um é baseado em comunicação Bluetooth (Zeevo ZV4002) e o outro é o mesmo rádio de baixa potência usado nos Mica2 Motes (Chipcon CC1000). Ambos os rádios podem ser operados simultaneamente de forma independente ou ser totalmente desligados quando não estiverem em uso. O BTnodes suporta dois sistemas operacionais: o TinyOS e o Nut/OS, executado em um microcontrolador Atmel Atmega1281 (Btnodes, 2009). ix. SquidBee Proposta de uma plataforma open hardware and source, batizado como open mote. O Squidbee (Figura 3.6, direita) possui um módulo de controle Arduino (Arduino, 2010), composto de microcontrolador ATmega8 (8Kb) ou ATmega168 (16Kb), EEPROM de 512 bytes e SRAM de 1 Kb. A comunicação é realizada por um módulo XBee, com taxa de transmissão de 250 kbps, frequência de 2.4GHz e alcance entre 100 e 1000 metros. Possui sensores de temperatura, umidade e luminosidade, além da possibilidade de inclusão de outros. A alimentação do sistema pode ser feita por bateria de 9V. No site da SquidBee é possível encontrar informações do tipo Construa seu próprio Mote (Libelium, 2010b). Figura 3.6: Plataformas BTnode (Btnodes, 2009) e SquidBee (Open Mote) (Libelium, 2010b) A Tabela 3.1 apresenta um resumo comparativo com quatro dos principais elementos constituintes dos nós sensores descritos anteriormente. Apenas os nós sensores Waspmote e SquidBee não tiveram a informação referente ao sistema operacional disponibilizado (N/D) Protocolos de Comunicação A comunicação em RSSF apresenta uma série de desafios e oportunidades de pesquisas, desde os protocolos de comunicação internos dos nós sensores, até a comunicação entre os diversos elementos constituintes da rede. O gasto energético é dependente da distância sendo bem
42 41 Tabela 3.1: Tabela comparativa dos nós sensores. Nome Processador Rádio S. O. Mem. MicaZ Atmega 128L Chipcom CC2420 TinyOS 512KB 8MHz - 8-bits (2,4 GHz kbps) Imote2 Intel PXA271 Xscale Chipcom CC2420 Linux, TinyOS 32MB 416MHz - 32-bits (2,4 GHz kbps) ou SOS Spec Atmel Risc Chipcom CC1000 TinyOS 3KB 8MHz - 8-bits (100 kbps) Firefly Atmega 1281 Chipcom CC2420 TinyOS 128KB 16MHz - 8-bits (2,4 GHz kbps) Fleck 3B Atmega 1281 Nordic nrf905 FOS ou 1MB 8MHz - 8-bits (915MHz - 72 kbps) TinyOS ēko Atmega 1281 Chipcom CC2420 TinyOS 128KB 16MHz - 8-bits (2,4 GHz kbps) Waspmote Atmega 1281 XBee N/D 128KB 8MHz - 8-bits (868MHz - 2,4 GHz) Squidbee ATmega8 (16MHz)- 8-bits/ XBee N/D 8-16KB ATmega168 (20MHz)- 8-bits (2,4 GHz kbps) Btnode Atmega 1281 Zeevo ZV4002 e TinyOS ou 128KB 8MHz - 8-bits Chipcom CC1000 Nut/OS conhecido que a energia dissipada é proporcional ao quadrado da distância podendo chegar à quinta potência dependendo do ruído. Além desta proporção física, outros aspectos envolvem a relação de consumo com a comunicação em RSSF. Serviços como controle de congestionamento, segurança dos dados, controle de perdas e entregas de pacotes, transmissão multimídia, entre outros, são apenas algumas das questões envolvidas com o projeto de protocolo para RSSF. Alguns dos protocolos mais comuns são apresentados a seguir. Não é foco deste trabalho desenvolver novos protocolos de comunicação. a. ZigBee: O protocolo ZigBee foi idealizado por um consórcio de empresas denominado ZigBee Alliance. Este protocolo foi projetado para permitir comunicação sem fio confiável com baixo consumo de energia e baixas taxas de transmissão para aplicações de RSSF. O protocolo utiliza especificação IEEE para rádio frequência e opera em bandas de frequências de GHz, MHz e MHz. O padrão Zigbee define as camadas de aplicação e de rede, responsáveis por estabelecer circuitos lógicos e de roteamento entre dois pontos e da gerência da interface das aplicações específicas, respectivamente. Além disso, o Zigbee ainda define os métodos de segurança do protocolo
43 42 como um todo. A camada física, responsável por transmitir os dados por meio de um sinal de rádio, e a camada de enlace, responsável por controlar a ordem de acessos ao meio, obedecem ao padrão IEEE por suas características de baixo custo de implantação, baixa complexidade e baixo consumo de energia (Morais et al., 2008; Stefani, 2008; Yick et al., 2008). b. TinyOS Beaconing - TOSB: Este é o protocolo de roteamento padrão utilizado pelo sistema operacional TinyOS. O TOSB busca construir uma estrutura de roteamento baseada em caminho mínimo, que cria rotas a partir do nó base para os demais nós da rede para que os dados sejam enviados, através de múltiplos saltos. Para a descoberta do caminho mínimo, o nó base envia um pacote, denominado beacon, através da rede. Quando o pacote é recebido os nós sensores conseguem determinar a sua distância em relação ao nó base. Os nós que receberam os pacotes utilizam essas informações para enviar os dados ao nó base (Karlof e Wagner, 2003; Levis e Gay, 2009). c. Directed Diffusion - DD: Exemplo de protocolo de roteamento centrado em dados, o DD procura estabelecer canais eficientes de comunicação entre os nós sensores e o nó base, de acordo com dois conceitos: roteamento centrado em dados e agregação de dados. O roteamento centrado em dados ocorre quando um nó se interessa pela informação contida em um outro nó. Neste caso o protocolo envia esta informação ao nó requerente. O conceito de agregação de dados significa que os nós intermediários procuram agregar seus dados em um pacote simples de dados, reduzindo os volumes e quantidades transmissões de dados(akkaya e Younis, 2005). d. Proactive Routing with Coordination - PROC: O PROC é um protocolo de roteamento do tipo pró-ativo, o qual permite interação entre a aplicação e o protocolo de roteamento, proporcionando um aumento de desempenho, se comparado a outros protocolos de roteamento. Sua topologia em forma de árvore tem como raiz o ponto de acesso, a junção dos galhos representa os nós coordenadores e os nós folhas nas extremidades. Os dados coletados
44 43 pelos nós sensores são enviados para o nó base por meio de uma estrutura de roteamento denominada backbone. A construção do backbone é feita em duas etapas. Na primeira etapa realiza-se a eleição dos coordenadores em que cada nó tem uma probabilidade de tornar-se coordenador, mas isso dependerá de um conjunto de regras e das especificações da aplicação. Na segunda etapa os backbones são complementados com a adição de nós. Este processo é executado periodicamente, reconstruindo o backbone e gerando um revezamento de coordenadores e um consumo de energia de forma balanceada pelos nós (Macedo et al., 2005; Ruiz et al., 2004). e. Low-Energy Adaptive Clustering Hierarchy - LEACH: Protocolo de roteamento hierárquico que busca promover a formação de agrupamentos (clusters) de nós, com base na potência do sinal, pela eleição de nó líder a cada ciclo. Os nós do agrupamento enviam seus dados para o líder, que tem a função de repassá-los, por single-hop, para o nó base. Essa característica determina que o tipo de rede não seja aplicada em regiões muito amplas, ficando a mesma limitada em função do alcance e potência de transmissão do rádio do nó líder (Akkaya e Younis, 2005; Ruiz et al., 2004). f. Geographical and Energy Aware Routing - GEAR: Protocolo de roteamento geográfico que tem por objetivo diminuir o consumo de energia da rede. Ele faz o endereçamento das regiões da rede por meio de retângulos e o repasse dos dados é feito por meio do nó que possuir o menor custo de envio até o destino. O custo do envio é calculado analisando-se a distância e a energia residual dos nós constituintes de tal rota até o nó destinatário. O destaque desse protocolo está no uso de informações dos nós constituintes da rota, permitindo o estabelecimento eficiente de rotas (Ruiz et al., 2004). g. SPEED: Este protocolo oferece três tipos de serviços de comunicação em tempo real: realtime unicast, real-time area-multicast e real-time area-anycast. Seu caráter espaço-temporal é o que o diferencia de outros protocolos que usam localização geográfica para o encaminhamento, pois, leva em consideração a entrega oportuna dos pacotes.
45 44 A comunicação em tempo-real fim-a-fim é atingida mantendo-se uma velocidade de entrega desejada em toda a rede através de uma combinação de controle de feedback e encaminhamento geográfico não-determinístico. Funciona bem em condições de escassez de recursos e pode prover diferenciação de serviços, tornando-se um dos primeiros protocolos a preocupar-se com roteamento em tempo-real para RSMSF (Akyildiz et al., 2007). h. MMSPEED: Extensão do SPPED, o protocolo MMSPEED procura diferenciar entre fluxos com atraso e exigências de confiabilidade. É baseado em uma abordagem cross-layer entre as camadas MAC e de Rede, escolhendo rigorosamente qual critério será tomado para a chegada de pacotes: confiabilidade ou pontualidade. Este protocolo também introduz uma nova métrica, chamada On-Time Reach-ability, capaz de fornecer uma probabilidade de que um pacote chegue ao seu destino dentro de limites de atrasos permitidos. Prover garantias de atraso em uma rede dinâmica é uma tarefa muito difícil, especialmente relacionadas a visualização de imagens multimídia. MMSPEED defronta este problema através da adoção de uma abordagem probabilística, mas com necessidade de muitos estudos e evoluções nesta área (Akyildiz et al., 2007) Aspectos de Projeto em RSSF O projeto de RSSF deve considerar a aplicação, a realização de tarefas específicas e o uso de dispositivos energeticamente otimizados, visando sua permanência ativa por longos períodos de tempo e de forma autonômica. Esta preocupação pode ser verificada no momento da utilização da unidade de comunicação que, uma vez em funcionamento, eleva exponencialmente o consumo de energia do dispositivo quando este transmite ou recebe dados. Em vista disto, o consumo eficiente dos recursos energéticos é fundamental para estas redes, sendo seu fator mais crítico atualmente. Em sua maioria, os nós utilizam algum tipo de bateria como fonte de alimentação, porém esta é escassa e finita, o que torna sua substituição inviável num ambiente inóspito, muitas vezes hostil ou de desastre, composto por centenas ou
46 45 milhares de nós (Hu et al., 2005; Lopes, 2007; Loureiro et al., 2003; Ruiz, 2003; Yick et al., 2008). Por apresentarem dimensões reduzidas, os elementos que constituem a rede possuem restrições de hardware consideráveis, tais como memória capaz de armazenar entre dezenas a poucas centenas de kbytes de dados, baixo clock de processamento do microcontrolador, influenciando diretamente na capacidade e no desempenho da realização de grandes tarefas, e unidade de comunicação de curto alcance, com reduzida taxa de transmissão de dados. Ao se focar um pouco mais a respeito da questão da escolha dos componentes de hardware de um nó sensor, percebe-se que todos os elementos busca ser o mais energeticamente eficiente possível. Dependendo da aplicação a que se destina, pode ser feita a escolha por elementos que possuam um melhor desempenho em detrimento a um possível aumento no consumo de recursos energéticos, como pode ser o caso de se utilizar um microcontrolador com maior poder computacional (maior clock), para atender às necessidades de processamento local de dados, ao invés de se utilizar uma unidade de comunicação de grande alcance e, também, de maior consumo energético. O fluxo dos dados é, predominantemente, unidirecional. Uma vez que o principal objetivo da rede é coletar os dados do ambiente e encaminhá-los para um ponto de acesso que, por sua vez, têm a incumbência de transmiti-los para um servidor remoto ou uma rede externa, como a Internet (Lopes, 2007). A topologia de uma RSSF é dinâmica, mesmo quando apresenta elementos de rede estáticos. Esse dinamismo efetiva-se pelo fato de nós sensores saírem da rede devido ao esgotamento de sua fonte de energia; aumento da densidade da rede, com a colocação de novos nós para ampliar a área de cobertura da mesma; problemas de calibração dos dispositivos sensores; falhas nos componentes; falhas de comunicação, entre outros (Ruiz, 2003).
47 Rede de Sensores Multimídia Sem Fio Com o aumento da disponibilidade e a diminuição dos custos de recursos de hardware, como câmeras e microfones, novas capacidades e possibilidades são introduzidas às RSSF. Esses recursos permitem que conteúdo multimídia seja extraído ubiquamente de ambientes, tais como áudio, vídeo e imagem, favorecendo o desenvolvimento de Redes de Sensores Multimídia Sem Fio (RSMSF), como pode ser visualizado na Figura 3.7. Figura 3.7: Arquitetura de Referência de uma Rede de Sensores Multimídia Sem Fio.[Yick et al.(2008)] As RSMSF são redes que utilizam sensores multimídia tais como os apresentados na Seção Estas redes trazem inovações às RSSF tradicionais por apresentarem oportunidades no campo de processamento de sinais bem como os aspectos de aquisição e comunicação destes. Essas redes têm a capacidade de aumentar, significativamente, o grau de interação com os mais diversos ambientes de aplicação. Entre as novas aplicações, pode-se citar (Alemdar e Ersoy, 2010; Campbell et al., 2005; Fernández-Luque et al., 2009; Gürses e Akan, 2005; Huang et al., 2009; Kew e Jeong, 2009; Yick et al., 2008):
48 47 Rede de sensores de supervisão multimídia: Nós dotados com sensores acústicos e de vídeo para melhorar e complementar os sistemas de vigilância contra crimes e ataques terroristas. Cuidados da saúde avançados: Pacientes possuem sensores médicos que monitoram alguns parâmetros, tais como temperatura corpórea, pressão sanguínea, respiração, movimentos. Por exemplo, caso uma pessoa idosa venha a sofrer uma parada cardíaca ou sofrer uma queda. Nestes casos, câmeras e microfones podem monitorar o paciente e o ambiente onde o mesmo se encontrar. Monitoração ambiental: Uso de sensores acústicos e de vídeo para monitoração, rastreamento e identificação de aves, anuros, incêndios, que dependam do envio de grandes volumes de informações em tempo crítico. Controle de processos industriais: Conteúdo muiltimídia pode ser utilizado para controle de processos de tempo crítico, como a inspeção de produtos para se encontrar defeitos de fabricação e controle de estoques. As aplicações para RSMSF ampliam-se progressivamente, isso faz com que surjam novos desafios aos projetos e ao desenvolvimento dessas redes. Um dos maiores desafios está em aumentar a qualidade dos serviços para as aplicações, pois elas necessitam de maior largura de banda para o conteúdo a ser transmitido. Aumento do consumo de energia necessário ao funcionamento dos dispositivos, aperfeiçoamento nas técnicas de processamento dos dados, desenvolvimento ou melhorias dos algoritmos e protocolos, também estão entre esses desafios (Akyildiz et al., 2007; Gürses e Akan, 2005; Yick et al., 2008). Por ocasião destas novas aplicações alguns fatores influenciam direta, ou indiretamente, o projeto de uma RSMSF, principalmente por trabalharem com processamento de sinais, o que exige maiores recursos computacionais e de comunicação (Campbell et al., 2005; Gürses e Akan, 2005; Yick et al., 2008). Abaixo são descritos alguns desses fatores (Akyildiz et al., 2007):
49 48 Requisitos de qualidade de serviços específicos da aplicação: Uma das características das RSMSF é trabalhar com conteúdos multimídia do tipo instantâneo, obtidos por observação de eventos em um curto período de tempo; e de fluxo, cujo conteúdo é gerado por longos períodos de tempo e requer a entrega contínua das informações. Isto requer um modelo de entrega de dados diferente das RSSF tradicionais em relação a requisitos de consumo de energia, atrasos, confiança, distorções, etc. Demanda por alta largura de banda: Conteúdo multimídia requer largura de banda de transmissão maior do que o suportado, atualmente, pelos nós sensores, que é da ordem de 250 kbit/s (caso do MicaZ). Assim, necessita-se de novas técnicas low power para altas taxas de transmissão de dados. Consumo de energia: Primordial para o desenvolvimento e estabelecimento das RSMSF, pois as aplicações multimídia produzem maior volume de dados, exigindo dos dispositivos maior carga de processamento e maior largura de banda de transmissão. Portanto, protocolos, algoritmos e arquiteturas são fatores críticos que devem ser observados com o intuito de maximizar a vida útil da rede em detrimento ao fornecimento de uma qualidade de serviços exigidos pela aplicação. Processamento em rede: Devido ao alto volume de dados produzidos pelos sensores multimídia, o processamento em rede requer novas arquiteturas para processamento colaborativo, distribuído e com restrição de recursos que permitam a filtragem e extração de informações na borda da rede sensora, podendo aumentar a escalabilidade e diminuir a transmissão de dados redundantes do sistema. Área de cobertura: Os modelos de cobertura desenvolvidos para as RSSF tradicionais não são suficientes para o planejamento de pré-implantação de uma RSMSF. No caso de sensores acústicos a cobertura de sensoriamento é dependente do raio de captação do som, enquanto que sensores visuais (imagem e vídeo) dependem do campo de visão do
50 sensor (Lopes, 2007) e da não obstrução do mesmo e são direcionais, exigindo um maior trabalho de colaboração entre os nós. 49 Técnicas de codificação multimídia: Novas técnicas de compressão de dados se fazem necessárias, pois a transmissão de streams de vídeo, por exemplo, em um ambiente multi-hop exige alta demanda por largura de banda e processamento, o que compromete, energeticamente, todo o sistema da rede. Os codificadores atuais trabalham com o modelo preditivo, na qual o algoritmo busca redundâncias entre quadros para diminuir a quantidade de dados a ser transmitida ou armazenada. Porém, estudos demonstram que técnicas como a codificação de fonte distribuída (Girod et al., 2005) permitem o uso de codificadores e decodificadores mais simples, viabilizando sua utilização em redes de sensores de vídeo. No contexto desta dissertação, uma RSMSF será desenvolvida como instrumento de ecologia acústica, possibilitando a identificação de espécies de anfíbios anuros e a monitoração de seu habitat. 3.3 Processamento Digital de Sinais: Conceitos O Processamento Digital de Sinais (Digital Signal Processing - DSP) é uma área do saber que analisa um único tipo de dado: sinais. Esses sinais são extraídos do mundo real e analisados utilizando-se técnicas e modelos matemáticos, algoritmos, com a finalidade de realizar transformações ou extrair informações desses sinais. O sinal digital é uma representação numérica de sinais analógicos, tais como: luz, ondas sonoras, vibrações sísmicas, imagens, temperaturas, entre outros. Conversores analógico-digital (Analog-to-Digital Converter - ADC) e digital-analógico (Digital-to- Analog Converter - DAC) permitem que computadores digitais interajam com esses sinais. O ADC é responsável por converter os sinais analógicos em sequências de 0s e 1s, para que possam ser analisados por programas e computadores. No processo de conversão, o ADC lê as entradas analógicas de forma contínua e, na sua saída, realiza uma amostragem do sinal a
, e é fornecida em Hertz (Hz) (Oliveira e Andrade, 2006; Smith, 2003).")
51 50 cada intervalo de tempo fixo, de acordo com a frequência de amostragem, disponibilizando um determinado valor (quantização) de tensão elétrica (em volts) que represente o sinal original. A frequência de amostragem é a quantidade de amostras capturadas no intervalo de um segundo (1s), e é fornecida em Hertz (Hz) (Oliveira e Andrade, 2006; Smith, 2003). Segundo Oliveira e Andrade (2006), de acordo com o Teorema de Nyquist (3.1), a frequência de amostragem deve ser, no mínimo, o dobro da frequência máxima do sinal contínuo. Como exemplo, para o ADC representar adequadamente um sinal de áudio com frequência de 10 KHz deve ser utilizada uma frequência de amostragem de, no mínimo, 20 KHz. f nyquist > 2 f signal (3.1) Por sua vez, o DAC tem por finalidade transformar aquelas sequências digitalizadas novamente em sinais analógicos, que podem ser devolvidos para o mundo real (Smith, 2003). Toda essa sequência pode ser observada na Figura 3.8. Figura 3.8: Processo de captura, digitalização e devolução do som para o ambiente. A tecnologia DSP está presente em uma grande variedade de dispositivos, como aparelhos celulares, câmeras fotográficas, computadores, aparelhos de DVD, e em áreas como a medicina, militar, automotiva, comercial. DSP é usada para compressão e descompressão de sinais, como em câmeras fotográficas, na implementação de filtros digitais para a remoção de partes indesejadas do sinal, como ruídos, ou na extração de fragmentos importantes, como as componentes de uma determinada banda de frequência (Smith, 2003). Na Figura 3.9 é demonstrada uma grande diversidade de áreas onde são utilizados os conhecimentos em DSP. Mas, uma área que tem se utilizado muito desta tecnologia é a de
52 aplicações de RSSF em monitoração e rastreamento acústicos (Gerhardt e Huber, 2002; Hu et al., 2005; Shukla et al., 2004), que será melhor descrita nas subseções seguintes. 51 Figura 3.9: Aplicações de Processamento Digital de Sinais, adaptado de Smith (2003) Transformada Rápida de Fourier É possível encontrar na literatura métodos e técnicas relacionadas à DSP. A Transformada Rápida de Fourier (Fast Fourier Transform - FFT) é uma forma eficiente e rápida, computacionalmente, de se calcular o mesmo resultado obtido pela Transformada Discreta de Fourier (Discrete Fourier Transform - DFT), método este utilizado para decompor um sinal (o áudio digital) em suas componentes de frequência e amplitude. Considerando-se N amostras do sinal no domínio do tempo, denotadas f(x), x=0,1,2,...,n-1, a DFT é dada por um conjunto de N amostras do sinal no domínio da frequência, denotadas por F(u), u= 0,1,2,...,N-1 e definidas por Onde : F(u) = 1 N N 1 f (x)wn ux (3.2) x=0
53 52 W N = e j2π/n (3.3) A FFT é um algoritmo complexo que calcula o espectro de frequência correspondente a N pontos no domínio do tempo. Dentre os algoritmos existentes, o algoritmo de Cooley-Tukey, de 1965, é um dos mais conhecidos, sendo que suas implementações mais utilizadas são as denominadas Radix-2 e Radix-4 (Lyons, 2004). Na sequência é descrita a implementação da Radix-4, segundo Atmel (2009c), a ser implementada nesta dissertação. Onde : F(u) = 2 nlog 1 x=0 f (x)w ux N (3.4) W N = e j2π/2nlog (3.5) Para fins de comparação, a complexidade algorítmica de uma DFT é da ordem de O(log 2 n 2 ), enquanto que sua variante, a FFT, possui complexidade algorítmica O(n log 2 n) (Smith, 2003). De acordo com o trabalho de Hu et al. (2005), para reconhecimento automático dos anfíbios anuros, a FFT é aplicada sobre o sinal digital de áudio recebido pelo microfone do dispositivo, com a finalidade de se produzir um espectrograma de tempo-frequência necessário para as análises Wavelets Outra técnica que pode ser empregada em DSP, com melhores resultados e precisão, é a de Wavelets. De acordo com Graps (1995) e Strang (1993)), wavelet é uma função que satisfaz a certos requisitos matemáticos, capaz de decompor uma função no domínio do tempo em diferentes escalas e que pode ser utilizada na representação de dados ou de outras funções.
54 53 Sua análise é feita pela aplicação sucessiva da Transformada Wavelet (Wavelet Transform - WT) segundo uma escala (no domínio do tempo e da frequência), permitindo que sejam vistos aspectos tanto em nível global quanto em detalhes; e não apenas no domínio da frequência, como em FFT. A WT é a representação de uma função por meio de wavelets. Outro fator interessante é que a complexidade computacional de uma de suas variantes, a Transformada Wavelet Discreta (Discrete Wavelet Transform - DWT) é da ordem de O(n) (Strang, 1993). Não é objetivo deste trabalho desenvolver um aprofundamento teórico referente a utilização de FFT ou wavelets, mas apresentar sua utilidade como ferramenta no processamento do áudio digital para o reconhecimento de vocalizações. A escolha da utilização da FFT neste trabalho é relativa à proposta de utilização do microcontrolador Atmel AVR32-UC3B. Porém, fica a técnica de wavelets como uma opção para ser utilizada em trabalhos futuros. 3.4 Monitoração Ambiental A monitoração de variáveis do habitat não tem por objetivo apenas extrair da natureza dados isolados, mas correlacionar tais dados em busca de informações a respeito da dinâmica local ou do acontecimento de eventos específicos, tais como a possibilidade de detecção de indícios de degradação ambiental, poluição, focos de incêndio, entre outros. A utilização da tecnologia de RSSF pode ser aplicada a este contexto de forma a permitir a coleta de dados ambientais, tais com temperatura, luminosidade, umidade, entre outros, cujos requisitos e soluções adotadas são específicas para cada aplicação a que se destinam. O risco de incêndio, por exemplo, está diretamente associado às condições climáticas locais (nível de precipitação, umidade relativa e temperatura do ar) para determinação das condições da vegetação. Para a obtenção do risco de incêndio são disponibilizados índices para a verificação de tal ocorrência correlacionando duas ou mais variáveis, a saber: o Índice de Nesterov tem como variáveis de correlação a temperatura e o déficit de saturação do ar;
55 54 o Índice de Angstrom correlaciona a temperatura e a umidade relativa do ar e a Fórmula de Monte Alegre utiliza a precipitação pluviométrica e a umidade relativa do ar (Boggia et al., 2008). As RSMSF podem ser implementadas para o sensoriamento de dados multimídia, como o som, e, assim como ocorrem com as RSSF, são igualmente dependentes do contexto da aplicação. Desta forma, se faz necessário especificar os requisitos da aplicação de monitoração e identificação animal a qual se destina a RSMSF proposta neste trabalho. Desta forma é possível utilizar a vocalização de anuros no processo de identificação automática da espécie. Características como tamanho, idade e peso aproximados também são passíveis de serem reconhecidos pela análise acústica. Entretanto, estas características não foram incluídas na implementação do algoritmo de identificação, ficando esta análise para trabalhos futuros. A cobertura da área de interesse é mais um aspecto que deve ser considerado. Uma vez que os microfones (e mesmo câmeras de vídeo) desses sensores possuem alcance limitado, isso obriga a disposição dos elementos de rede de forma mais próxima uns dos outros. Esse aspecto implica em tomada de decisões baseadas na necessidade de cobertura e na quantidade de nós sensores disponíveis. Grande área de cobertura e utilização de poucos nós implica em uma cobertura acústica falha da rede, devido ao distanciamento dos nós para além do raio de alcance dos microfones, mesmo que haja alcance de comunicação entre os rádios dos mesmos. O inverso da situação anterior implica na utilização de vários nós sensores para uma cobertura menor da área de interesse. Outro aspecto relevante são as interferências do meio sobre o objeto a ser monitorado. Identificar um anuro utilizando um dado acústico puro, entenda-se ruídos e interferências, é uma solução puramente idealizada. Como afirmado anteriormente o indivíduo não está isolado, mas em um ambiente composto por sons de outros indivíduos (que podem ser ou não da mesma espécie), de chuvas, de rios, de ventos, entre outros.
56 55 Por fim, as informações disseminadas consistem nos dados climáticos sensoriados e as possibilidades de correlação desses dados, além do resultado para a identificação da espécie, por meio da análise acústica dos dados. Tal decisão acarreta duas consequências para a aplicação. A primeira enfatiza a necessidade de um maior poder de processamento de dados localmente. A segunda enfatiza a diminuição nos custos de transmissão de dados multimídia pela rede, com consequente diminuição de gastos energéticos dos nós sensores e a expectativa em se prolongar o tempo de vida útil da rede Monitoração e Idenficação de Anuros Em 2008, o uso de RSSF para monitoração de anfíbios foi considerado um dos grandes desafios da Ciência da Computação para os anos seguintes, em um evento promovido pelas principais entidades de pesquisa da América Latina (Aquino et al., 2008). De acordo com Aquino et al. (2008), há uma crescente quantidade de pesquisas relacionadas à monitoração das populações de anuros, motivos que influenciam no aumento ou declínio dessas populações, descobertas de novas espécies, distribuição geográfica das espécies, entre outros. Uma das formas mais utilizadas por pesquisadores para a identificação de anuros consiste na captura local das vocalizações desses animais para análise em laboratórios. Anfíbios anuros são, em sua maioria, animais sensíveis às modificações do ecossistema onde habitam. Isso os tornam uma espécie de sensores naturais para a percepção de alterações ambientais. Em função de sua sensibilidade, até mesmo a presença humana os incomoda e os ameaça, forçando-os, em alguns casos, a mudarem seus comportamentos e a migrarem para outras áreas onde não se sintam ameaçados (Carey et al., 2002; Dodd, 2003; Price et al., 2007). Para a identificação das espécies se faz necessário capturar a vocalização dos anuros a distâncias muito próximas dos mesmos, por meio de microfones especiais. Os sons são registrados em gravadores e esses materiais são encaminhados para laboratórios de pesquisa para edição, análise e arquivamento digital dessas informações. Esse é um processo, em via de regra, longo e custoso (Dodd, 2003; Lima et al., 2006; Silva et al., 2008).
57 56 Os anuros utilizam a vocalização especialmente para fins de reprodução e defesa territorial. Em via de regra, essa vocalização tem padrões de repetição simples, o que torna possível a extração de características únicas de seus sinais sonoros servindo, tanto quanto as características morfológicas, para possibilitar o seu reconhecimento (Silva et al., 2008) Ecologia Acústica A extração de informações acústicas do ambiente remete ao termo Ecologia Acústica. Para muitos pesquisadores é um termo relativamente novo e não muito difundido, apesar de o início de seu emprego ser datado do final dos anos 60. Este termo foi utilizado pelo compositor Murray Schafer em suas pesquisas sobre os sons de diferentes ambientes com a finalidade de melhorar a acústica de espaços interiores e exteriores sobre o som percebido de sua música. De outra forma, é a relação, mediada pelo som, entre os seres vivos e o seu ambiente (Epstein, 2003). Esta conceitualização é mais ampla do que a abordada pela Bioacústica, que estuda os sons emitidos por animais, de outra forma, os sinais de comunicação como papel fundamental no comportamento das espécies que os utilizam (Vielliard e da Silva, 2007). Porém, esse conceito fica restrito ao estudo dos padrões de comunicação entre indivíduos da mesma espécie, sem levar em consideração os demais sons que os envolvem. A taxonomia do espectro acústico pode ser classificada em três partes: Antrofonia, Biofonia e Geofonia. A Antrofonia é o estudo dos sons originados de atividades humanas, como a fala. Biofonia estuda as características dos sons emitidos por organismos biológicos em um determinado local, como o canto das aves, o coaxar dos sapos. Por fim, tem-se que a Geofonia estuda os sons com características ambientais físicas, como o vento (Gage et al., 2004). Como exemplo, espectrogramas foram utilizados para a monitoração de espécies de sapos (Hu et al., 2005; Silva et al., 2008; Taylor et al., 1996) e aves (Moore, 2008; Naumowicz et al., 2008) para seu reconhecimento automático, como observado no Capítulo 2. Assim, técnicas de processamento digital de sinais são utilizadas para analisar os espectros acústicos
58 57 das amostras sonoras e retirar delas as informações de interesse para a finalidade a que se destinam. Os anuros utilizam-se do recurso da vocalização especialmente para fins de reprodução e defesa territorial (Dodd, 2003). Desta forma, em um ambiente cada som tem características relativamente invariantes que podem ser tão úteis para a identificação de uma determinada espécie quanto seus traços morfológicos (Gerhardt e Huber, 2002). Os eventos de interesse desta aplicação, a vocalização dos anuros, ocorrem com maior frequência no período noturno, por ser este o principal período de atividade reprodutiva dos mesmos. Com esta informação é esperado que elementos de rede, tais como microfone e processador DSP, permaneçam inativos durante os demais períodos do dia, promovendo o prolongamento do período de tempo funcional da rede. 3.5 Considerações Finais Este capítulo apresentou um referencial teórico a respeito da tecnologia de RSSF, seu funcionamento e tipos de serviços providos, os principais tipos de hardware que a compõe e quais suas características, exemplos de plataformas sensoras comerciais e presentes na literatura, bem com uma breve descrição das mesmas. Traz as principais áreas de aplicação desta tecnologia e foi descrita uma especialização das RSSF, chamada de Rede de Sensores Multimídia Sem Fio. Como apreciado, as RSMSF podem proporcionar um aumento no grau de interação com o ambiente da aplicação, uma vez que câmeras de vídeo e/ou microfones podem ser acoplados aos nós sensores, proporcionando aos mesmos a capacidade de extrair conteúdo multimídia, como áudio, vídeo e imagem, desses ambientes. Também foram apresentados conceitos iniciais sobre DSP e sobre monitoração ambiental e ecologia acústica. Todos esses conceitos iniciais, anteriormente descritos, servem como base para a extração de características que devem ser observadas para o desenvolvimento do nó sensor acústico, visando a monitoração de anfíbios anuros, a partir de suas vocalizações, correlacionando a sua presença em um determinado habitat com as condições ambientais do mesmo.
59 58 Utilizando os conceitos apresentados neste capítulo e analisando-se as aplicações da tecnologia de RSSF nos projetos apresentados no Capítulo 2, o capítulo seguinte apresentada a descrição da RSMSF e do protótipo propostos para identificação de uma espécie de anfíbio e da monitoração ambiental desta espécie em seu habitat.
60 59 CAPÍTULO 4 O desenvolvimento do nó sensor Mana-M Este capítulo descreve a aplicação de RSMSF proposta para a monitoração de anfíbios anuros e seu habitat. O capítulo apresenta o microcontrolador escolhido como objeto de estudo desta dissertação, o protótipo de um nó sensor proposto como solução para identificação acústica de anuros, bem como os problemas identificados com o desenvolvimento deste tipo de solução. Foram incluídas discussões sobre as decisões acerca dos dispositivos de hardware utilizados, das decisões e implementação dos aplicativos embarcados e a descrição do algoritmo de identificação de anuros. O texto está organizado de modo que a Seção 4.1 trata das escolhas relacionadas aos dispositivos de hardware que compõem o protótipo, dos aspectos de desenvolvimento dos softwares para os dispositivos de hardware e a descrição do algoritmo de identificação da espécie, bem como de uma ferramenta de acompanhamento para a região monitorada. Em especial a Seção apresenta a descrição do microcontrolador objeto de estudo desta dissertação. Por fim, a Seção 4.2 apresenta as considerações acerca do capítulo.
61 Protótipo do Nó Sensor Proposto Como mencionado na seção 3.1.3, existem algumas plataformas de nós sensores disponíveis comercialmente e outras acadêmicas. Considerando o material disponível no laboratório de pesquisa MannaTec 1, foram realizados estudos e experimentos no sentido de avaliar o uso da plataforma sensora MicaZ e do microcontrolador AVR32-UC3B, como elementos da RSMSF proposta para monitoração de uma espécie de anuro. As próximas seções descrevem os aspectos de hardware e software envolvidos com o protótipo, bem como as razões que levaram ao uso do microcontrolador AVR32 como uma expansão da plataforma MicaZ. Esta seção ainda inclui a apresentação de uma ferramenta de acompanhamento, em tempo real, da área de interesse monitorada Aspectos do Hardware O protótipo a que se referem os objetivos desta dissertação foi concebido com a utilização de dispositivos comerciais para a montagem do mesmo. Este protótipo de nó sensor foi chamado de Mana-M, um acrônimo para Manna Acoustic Node for Amphibian Monitoring. O nó sensor Mana-M foi composto por uma placa sensora MTS310CA (Crossbow, 2009) acoplada à plataforma sensora MicaZ e por um co-processador DSP, formado por um microcontrolador AVR32-UC3B0256 (descrito na seção ) disposto em um módulo de desenvolvimento Alvidi AL-UC3BMB (Alvidi, 2009), conectado a um protoboard, de modo a proporcionar o sensoriamento ambiental e o processamento de dados acústicos realizados localmente pelo nó sensor. Os dispositivos comerciais, acima descritos, podem ser visualizados na Figura 4.1. Outro conjunto nó sensor foi utilizado, composto por uma placa sensora MTS420CA (Crossbow, 2009) também acoplada à uma plataforma sensora MicaZ, sem processamento acústico. De acordo com Reddy e Sridhar (2010), quando o microcontrolador está ativo em processamento a 48 MHz seu consumo de energia fica em, aproximadamente, 26 ma da corrente, 1 Laboratório de pesquisa do Departamento de Informática, da Universidade Estadual de Maringá.
, ao se comparar o gasto energético com o completo processamento DSP local (parametrização, modelagem e")
62 61 Figura 4.1: MicaZ, com placa sensora MTS310CA, e Alvidi AL-UC3BMB, com AVR32 comparável ao consumo de energia despendido pelo rádio do MicaZ, quando este transmite à plena potência. Entretanto, em seus estudos, utilizando uma amostra de áudio de 22 KHz (aproximadamente 22 KB), ao se comparar o gasto energético com o completo processamento DSP local (parametrização, modelagem e classificação) da amostra e o gasto energético para a transferência da mesma pela rede, mesmo que em multi-saltos, concluiu-se ser mais custoso para a rede este último procedimento. Mesmo que ambos os procedimentos tenham um gasto energético alto ainda há de se incluir no resultado final a quantidade de saltos que o dado deve realizar até chegar a um ponto onde possa ser processado completamente. Uma particularidade deve ser observada, pois, entre os dispositivos de hardware, se fez necessária uma subdivisão de tarefas em: sensoriamento ambiental e processamento dos dados acústicos. A tarefa de sensoriamento é responsável pela extração os dados ambientais (temperatura, luminosidade, umidade, pressão atmosférica e som), cálculo do Índice de Angstrom e disseminação dessas informações através da rede, exceto o som, que é encaminhado para o co-processador, que realiza o processamento dos dados acústicos. Os elementos utilizam sensoriamento periódico de dados, sendo que os dados acústicos são extraídos apenas no período noturno, do ambiente monitorado. Para a tarefa de sensoriamento ambiental optou-se pela utilização do nó sensor MicaZ e das placas sensoras MTS310CA, que possui sensores de temperatura, luminosidade, microfone, magnetômetro e acelerômetro biaxiais, e MTS420CA, que possui sensores de temperatura, umidade do ar, pressão atmosférica, luminosidade, acelerômetro biaxial e GPS. Por se tratar de uma plataforma sensora de propósito geral, o nó sensor MicaZ é amplamente utilizado de facto

63 62 em aplicações para RSSF, mas, devido às suas restrições de recursos, sua utilização converge para aplicações de coleta de dados ambientais e execução de operações matemáticas simples. A tarefa de processamento dos dados acústicos consiste em receber os dados vindos do microfone, realizar a conversão analógico-digital, parametrizar os dados e extrair as informações necessárias para alimentar o sistema de identificação de espécies. O microcontrolador AVR32 foi escolhido para realizar esta tarefa por suas características de baixo consumo energético, alto poder de processamento e, principalmente, por disponibilizar uma biblioteca de funções DSP, para o processamento dos dados acústicos, entre outros recursos a serem citados na seção e por corresponder aos requisitos da aplicação. Para fins de comunicação entre a plataforma sensora e o co-processador foram realizadas conexões físicas entre a placa sensora MTS310CA, nos pontos responsáveis pelo envio dos dados de RX, TX, ADC, VCC e GND, e as portas específicas do co-processador, disponibilizadas no protoboard, para a coleta de tais dados, constituindo, assim, o Mana-M. A Figura 4.2 ilustra o diagrama de blocos de interconexão entre os dispositivos anteriormente descritos. Figura 4.2: Diagrama de blocos do nó sensor Mana-M. A coleta das informações da rede é de responsabilidade da estação base, composta por uma plataforma sensora Micaz acoplada a uma placa de interface serial MIB510 (Crossbow, 2009), também da Crossbow. A MIB510 é uma placa de interface multi-propósito usada com a família MICA. Ela é alimentada por uma fonte de energia elétrica externa e fornece interface serial RS-232. Por essa interface é possível reprogramar os nós ou receber as informações da rede. Esse conjunto é interligado, via comunicação serial, a um computador onde os dados de
64 sensoriamento são gravados em um banco de dados PostgreSQL (Postgresql, 2010), como pode ser observado na Figura Figura 4.3: Diagrama do nó-base conectado a um computador PC. Há de se evidenciar que a concepção do protótipo inicial previa a utilização da plataforma sensora ēko (Seção 3.1.3) para a realização do sensoriamento ambiental. Sua interligação com o microcontrolador ocorreria por intermédio do kit de desenvolvimento Atmel EVK1101 (Evk1101, 2009), composto por um microcontrolador AVR32UC3B, sensores de temperatura e luminosidade, leds e demais interfaces de comunicação. Entretanto, problemas alheios a este trabalho impediram a importação desses equipamentos. Isso ocasionou a substituição dos mesmos pela plataforma sensora MicaZ e pelo módulo de desenvolvimento Alvidi AL-UC3BMB, respectivamente, anteriormente descritos Microcontrolador Atmel AVR32 O Atmel AT32UC3B é um microcontrolador de alta performance, confiabilidade e baixo consumo energético, baseado no processador RISC AVR32 UC de 32 bits. Trabalha com frequências de até 60 MHz e foi projetado para aplicações embarcadas sensíveis ao custo, com ênfase no baixo consumo de energia, alta densidade do código e alto desempenho. Esse processador implementa uma Unidade de Proteção de Memória (MPU - Memory Protection Unit), um rápido e flexível controlador de interrupção para suportar os sistemas operacionais modernos, sistemas operacionais em tempo real e um conjunto de instruções DSP. O controlador DMA (Direct Memory Access) permite transferências de dados entre periféricos e memórias sem envolvimento do processador, enquanto o PDCA reduz o overhead de pro-
65 64 cessamento na transferência de dados contínuos e grandes fluxos entre os módulos dentro do MCU. O Power Manager - PWM melhora a flexibilidade e segurança: o detector on-chip Brown-Out monitora a alimentação, a CPU é executada a partir do oscilador RC on-chip ou de um oscilador de fontes externas e um relógio de tempo real. Os módulos PWM oferecem sete canais independentes, com muitas opções de configuração, incluindo a polaridade, o alinhamento de borda e de forma de onda não se sobrepõe. O AT32UC3B também possui interfaces de comunicação muitos para aplicações de comunicação intensiva. Além do padrão interfaces seriais como UART, SPI ou TWI, suporte a dispositivos USB de diversas classes, graças à configuração End-Point. A interface On-The-Go (OTG) permite que dispositivos como disco Flash USB ou uma impressora USB possam ser conectados diretamente ao processador. Além de ser um microcontrolador de alto desempenho computacional, se comparado aos microcontroladores da maioria dos nós sensores, opera em 3.3V de energia, sendo adequado para aplicativos portáteis e alimentadas por baterias. Possui arquitetura de barramento de alta velocidade e multicamada. Outra característica interessante é um conjunto de funções matemáticas otimizadas em estilo assembly. Estas informações estão disponibilizadas no site da empresa, sob forma de um Framework, composta por uma biblioteca com mais de 70 funções específicas para DSP, bibliotecas prontas para criptografia, processamento de áudio e de imagens, drivers para acesso aos periféricos e à CPU, acesso à memória, placas de kits de desenvolvimento, programas e scripts testes para Microsoft TM Windows R, entre outros (Atmel, 2009a). Especificamente, o microcontrolador estudado possui 256 KB de memória Flash, 32 KB de memória SRAM, interfaces de comunicação UART, SPI, I2S, TWI, entre outras características (Atmel, 2009a,d). A Tabela 4.1 mostra algumas características de configuração da série UC3B. Observa-se que a série UC3B possui versões que contemplam entre 64 Kbytes a até 512 Kbytes de memória Flash e, respectivamente, entre 16 Kbytes a até 96 Kbytes de memória de programa SRAM.
66 65 Tabela 4.1: Características de configuração da série UC3B. Adaptado de Atmel (2009) Versão Flash SRAM ADC OSC Pinagem AT32UC3B Kbytes 96 Kbytes lead TQFP AT32UC3B Kbytes 32 Kbytes lead TQFP AT32UC3B Kbytes 32 Kbytes lead TQFP AT32UC3B Kbytes 16 Kbytes lead TQFP AT32UC3B Kbytes 96 Kbytes lead TQFP AT32UC3B Kbytes 32 Kbytes lead TQFP AT32UC3B Kbytes 16 Kbytes lead TQFP AT32UC3B Kbytes 16 Kbytes lead TQFP A quantidade de pinos do microcontrolador pode ser de 64 ou 48 pinos, identificados por..uc3bx.., onde x pode assumir os valores 0 (64 pinos) ou 1 (48 pinos), sendo que desses cada versão disponibiliza 44 e 28 pinos GPIO, respectivamente, como pode ser observado na Figura 4.4 e na Figura 4.5 (Atmel, 2009a). Figura 4.4: Versão do microcontrolador com 64 pinos, 44 GPIO. Para complementar essa arquitetura o fabricante disponibiliza uma ferramenta visual para o desenvolvimento do software a ser embarcado no microcontrolador, chamada de AVR32 Studio, baseada na plataforma de desenvolvimento Eclipse (Eclipse, 2009). Possui docu-
67 66 Figura 4.5: Versão do microcontrolador com 48 pinos, 28 GPIO. mentação on-line para consulta, bem como alguns exemplos de ajuda ao entendimento do funcionamento do microcontrolador. Na Figura 4.6 é mostrado um diagrama de blocos com os componentes constituintes do microcontrolador. Entre os componentes é possível observar as portas de comunicação, os relógios, conversores, interfaces de comunicação, entre outros. Algumas instruções têm múltiplos modos de endereçamento, a fim de reduzir o tamanho do código a um mínimo necessário. Como exemplo, as instruções com imediatos, muitas vezes têm um formato compacto com um imediato menor, e um formato alargado com um imediato maior. Desta forma, o compilador é capaz de usar o formato que dá o menor tamanho de código. Outra característica do conjunto de instruções é que as instruções frequentemente usados, como soma, tem um formato compacto, com dois operandos e um formato alargado, com três operandos. O formato maior aumenta o desempenho, permitindo uma adição e uma jogada de dados na mesma instrução em um único ciclo. Instruções load/store têm vários formatos a fim de reduzir o tamanho do código e acelerar a execução. O arquivo de registro é organizado em dezesseis registros de 32 bits, incluindo Program Counter, Link Register e Stack Pointer. O conjunto de instruções do microcontrolador pode ser observado no Anexo A.
68 67 Figura 4.6: Diagrama de blocos do microcontrolador AVR32-UC3B Componentes Como já mencionado anteriormente, a versão escolhida do AVR32 disponibiliza 32 Kbytes para memória de programação SRAM e 256 Kbytes de memória Flash. Ainda faz parte da
69 68 composição do MANA-M o sensor acústico (microfone) BOB-09964, da Sparfun Electronics (Sparkfun, 2010). O BOB é, na realidade, uma pequena placa onde estão montados um microfone elétrico conectado a um circuito integrado amplificador, que permite capturar frequências entre 10 Hz e 13 KHz. O circuito pode ser alimentado com 2.7V até 5.5V. A comunicação entre os nós sensores será por meio do rádio comunicador CC2420, da Texas Instruments. O CC2420 é um transceptor de baixo consumo e possui frequência de banda de 2,4 GHz, com potência de transmissão entre -24 a 0 dbm e taxa de transmissão a até 250 kbps, o que confere a este dispositivo um raio de alcance externo de até 100 m. Quando transmitindo em potência máxima consome cerca de 17,4 ma, ao passo que em modo de recepção chega a consumir 19,2 ma. Operando em modo idle consome 20 µa e em modo sleep consome menos de 1 µa. A alimentação elétrica do MANA-M deveria ser feita por meio das baterias da plataforma sensora MicaZ. Isso permitiria ao MicaZ controlar os eventos responsáveis por ligar e desligar o co-processador para suas devidas tarefas. Entretanto, a energia disponibilizada pelo mesmo foi suficiente apenas para o funcionamento do co-processador em 12 MHz. Esta frequência tornou incapaz a realização dos cálculos da FFT para o experimento proposto. Essa incapacidade foi devida ao ajuste da frequência de clock do microcontrolador para 48 MHz. Isso demandou uma alimentação em 3,3 V, acima dos 2,4 V disponibilizados pelas baterias do MicaZ. A escolha dessa frequência se fez pelas análises apontadas por Reddy e Sridhar (2010). Assim, se fez necessária a aplicação de uma fonte de energia externa. Essa fonte de energia foi formada pela composição de 4 baterias, tipo AA alcalina, de 1,2 V cada, exclusiva para o MANA-M Desempenho A Atmel, ao desenvolver o AVR32, disponibilizou um conjunto de contadores de desempenho que permitem aos usuários avaliar o desempenho do sistema. Para isto, dois contadores de eventos configuráveis são fornecidos, além de um contador de ciclo de clock. Estes três contadores podem ser usados para coletar informações como a taxa de falhas da cache, taxa de acerto em previsão de desvio, entre outros. Os três contadores são implementados como registradores
70 69 acessíveis de 32-bits e podem ser usados para monitorar vários eventos diferentes ou efetuar medições específicas. De acordo com Hennessy e Patterson (2003), existem fórmulas bastante simples que relacionam a medida do tempo de execução gasto no processador com os ciclos de clock e tempo do ciclo de clock. Uma delas é mostrada a seguir: T p = C F (4.1), onde Tp = Tempo de execução do processador, C = Ciclos de clock do processador, e F = Frequência de clock do processador. Porém, o tempo de execução também depende do número de instruções do programa e o número de ciclos de clock necessários à execução de uma instrução é dado por: C = Nip.Cpi (4.2), em que Nip = Número de instruções do programa, e Cpi = Número médio de ciclos por instrução. Desta forma, é possível escrever a equação do desempenho em função da quantidade de instruções, da média de ciclos por instrução e do ciclo de clock do microcontrolador. Substituindo-se 4.2 em 4.1, tem-se: T p = Nip.Cpi F (4.3) Fórmulas como as acima descritas são úteis porque separam os três principais fatores que afetam o desempenho de um microcontrolador, que são: a quantidade de instruções; a média dos ciclos gastos por instrução e a frequência de clock.
71 Aspectos do Software A programação de software para dispositivos embarcados possui um certo grau de complexidade diferenciado quando comparado a programação de software para sistemas desktop. Essa complexidade é dada pela exigência em se observar aspectos específicos, tais como restrições de memória, processamento e energia, entre outros, imprescindíveis para o sucesso da aplicação. Em comparação, os sistemas desktop contam com alta capacidade de memória, grandes áreas de armazenamento, não possuem restrições de energia, entre outros. Outro aspecto relevante pode ser observado pela quantidade reduzida de ferramentas auxiliares ao desenvolvimento de software/sistemas embarcado (frameworks de apoio) (Ibrahim et al., 2006). Para o funcionamento do protótipo foram desenvolvidos 2 (dois) aplicativos para serem embarcados nos nós sensores, sendo um voltado para a utilização da placa sensora MST310CA e um para utilização da placa sensora MTS420CA. Também foi desenvolvido um aplicativo para ser embarcado no co-processador. Esses aplicativos têm a finalidade de satisfazer as tarefas de sensoriamento ambiental e processamento dos dados acústicos, respectivamente, de cada dispositivo. A tarefa de sensoriamento ficou responsável por extrair os dados ambientais (temperatura, umidade, pressão atmosférica, luminosidade e som) e disseminar estas informações através da rede, exceto o som, que é encaminhado apenas para o co-processador. Os elementos utilizam sensoriamento periódico de dados, em intervalos pré-definidos durante o dia e noite. A necessidade em se desenvolver dois aplicativos se deve ao fato do uso das placas sensoras MTS310CA e MTS420CA, com sensores distintos e dependentes de programação específicas para o correto funcionamento. A programação dos nós sensores foi realizada em linguagem NesC (Gay et al., 2003) para o sistema operacional TinyOS (Seção 3.1). Conforme abordado na seção anterior, é necessário realizar o cálculo de risco de incêndio logo que se tenham os dados das variáveis sensoriadas. Dentre os dados a serem sensoriados do ambiente, por meio dos nós sensores, se encontram as variáveis temperatura e umidade relativa do ar. Relacionando estas variáveis com os índices anteriormente descritos tem-se que
72 a melhor escolha a ser tomada é a da utilização do Índice de Angstrom para o cálculo do risco de incêndio. Esse índice pode ser visualizado pela fórmula a seguir: 71 A I = 0.05H 0.1(T 27) (4.4), onde H é o valor a umidade relativa do ar e T é a temperatura medida no mesmo intervalo de tempo de H. Ainda segundo Boggia et al. (2008), a tabela a seguir demonstra qual a interpretação deve ser extraída acerca do resultado obtido pela aplicação da equação 4.4. Tabela 4.2: Interpretação do risco de incêndio obtido pelo Índice de Angstrom Nível Valor obtido Nulo AI > 4 Baixo 3 < AI 4 Médio 2.5 < AI 3 Alto 2 < AI 2.5 Extremamente Alto AI 2 Os dados acústicos são extraídos do ambiente monitorado apenas no período noturno, cujo microfone permanece ligado em frações de segundos, em loops contínuos de sensoriamento, em intervalos periódicos pré-definidos. A programação do co-processador foi feita em linguagem C, utilizando o ambiente de programação AVR Studio, conforme mencionado na seção Um estudo sobre processamento digital de sinais se fez necessário para a implementação, em especial, do funcionamento do algoritmo FFT, suas variáveis e resultados. Esta etapa foi imprescindível para o desenvolvimento deste trabalho, sendo aplicada para o entendimento do funcionamento da biblioteca DSP do microcontrolador, em particular a correta passagem e recepção das variáveis da componente FFT para o algoritmo de identificação dos anuros, como pode ser acompanhado na seção A rotina do aplicativo, após sua implementação final, consiste em receber os dados sensoriados pelo MicaZ, converter o sinal analógico em digital e processar esses dados. Depois dos dados serem processados pelo AVR32, o microcontrolador devolve, via comunicação USART,
73 72 apenas uma resposta positiva ou negativa para o nó sensor. De posse dessa informação o nó sensor dissemina o resultado através da rede até chegar ao observador final (usuário fora da rede de sensores). Isso contribui para a conservação de energia dos elementos da rede, uma vez que não há a necessidade de transmitir dados multimídia por toda a rede Descrição do Algoritmo de Identificação de Espécie O algoritmo de identificação de espécie foi, inicialmente, implementado utilizando-se a linguagem de programação C. Essa implementação fez parte do trabalho de conclusão de curso realizado por Guilherme de Angeli Ferreira sob a orientação da professora Linnyer Beatrys Ruiz Aylon e co-participação nas etapas finais de desenvolvimento e testes de Carlos Fransley Scatambulo Costa (Ferreira, 2009). O algoritmo anteriormente descrito foi avaliado em ambiente Linux, em um computador tipo desktop PC, para, então, ser alterado para as especificações e restrições do microcontrolador AVR32. Isso permitiu validar o funcionamento do algoritmo de identificação antes de ser embarcado no microcontrolador. Após a implementação e os experimentos em ambiente Linux promoveu-se a sua reformulação e sua codificação em conformidade com as características, recursos e bibliotecas disponibilizados para o microcontrolador AVR32. A implementação foi concebida baseando-se em variáveis e operações matemáticas da biblioteca DSP em 32 bits. O objetivo destas escolhas encontrava-se em buscar uma maior precisão na manipulação de dados e na obtenção de resultados. O comportamento do algoritmo pode ser visualizado, de forma resumida, observando-se a Figura 4.7. O algoritmo lê os dados amostrados pelo ADC, carrega os dados para uma variável que é normalizada e, em seguida, aplica-se o enjanelamento Hamming para minimizar as margens de transição das amostras, conforme descrito com mais detalhes na seção Na sequência é realizada a FFT para se extrair os dados para a geração do vetor de espectro de potência, necessário para analisar se as frequências que caracterizam a espécie em questão se fazem presentes, garantindo a identificação da espécie.

74 73 Figura 4.7: Fluxograma de execução do algoritmo de identificação de anuro, iniciando com a leitura do ADC e finalizando com a resposta ao processamento Ferramenta de Acompanhamento Uma vez que os dados estão devidamente armazenados em um banco de dados, um site para Internet foi estruturado e implementado com a finalidade de disponibilizar uma ferramenta de estudo ambiental para ecólogos, biólogos, entre outros, a partir da visualização das informações da área monitorada. Na Figura 4.8 são apresentadas duas telas deste site. Em primeiro plano aparece a tela inicial do site e em segundo plano a visualização da área monitorada e os valores sensoriados de cada nó constituinte da rede.

75 74 Figura 4.8: Imagens de duas telas da ferramenta de acompanhamento da monitoração da área de interesse. O site foi implementado utilizando-se a linguagem de programação PHP 2, amplamente utilizada para construção de sites. Sua ampla comunidade de utilização e característica de fácil integração com banco de dados PostgreSQL foram fatores positivos para sua escolha. Neste site é possível realizar o acompanhamento, em tempo real, de acontecimentos relacionados à área monitorada. Estão disponibilizados dados instantâneos (temperatura, umidade, horário de sensoriamento, entre outros) de cada nó constituinte da rede. Informações em forma de gráficos também são disponibilizadas sobre o monitoramento dos nós sensores. Quando algum dos nós identifica um valor crítico, relativo ao Índice de Angstrom, esta informação é apresentada no site de forma destacada. Analogamente, ocorre quando um anuro é identificado pelo nó sensor DSP. 2 Acessível em:
76 Considerações Finais Esta seção apresentou o ambiente de aplicação de uma RSMSF para monitoração de anfíbios anuros e de seu habitat. Foram contextualizados os requisitos e características envolvidos na etapa de desenvolvimento do protótipo proposto por este trabalho. Também foram apresentadas as discussões e os problemas encontrados durante as etapas de construção do protótipo e da rede propostas, bem como as decisões tomadas durante a etapa de prototipagem e uma descrição resumida do algoritmo de identificação de espécie. Ao final, ainda foi apresentada a descrição de uma ferramenta on-line para o acompanhamento da região monitorada, sendo oferecido como uma solução de estudo ambiental para ecólogos, biólogos, entre outros. No capítulo seguinte é apresentada a implementação de uma rede e um estudo de caso para composição dos resultados obtidos, assim como discussões a respeito do decorrer deste trabalho, em especial dos dispositivos de hardware utilizados, das decisões, implementação dos aplicativos embarcados e os resultados alcançados.
77 76 CAPÍTULO 5 Implementação e Resultados Este capítulo trata da implementação da rede proposta e um estudo de caso para composição dos resultados obtidos e discussões a respeito do decorrer deste trabalho, em especial dos dispositivos de hardware utilizados, das decisões e implementação dos aplicativos embarcados. O texto está organizado de modo a apresentar os detalhes e problemas enfrentados para o desenvolvimento e funcionamento do protótipo. Na Seção 5.1 é apresentado um estudo de caso para validação do modelo e da rede propostos, bem como a implementação do site para Internet e os cenários de testes. Por fim, na Seção 5.2 são apresentados os resultados obtidos com o protótipo e as considerações acerca do mesmo. 5.1 Implementação e Estudo de Caso Para este trabalho foi escolhida a monitoração da espécie Perereca-de-olhos-vermelhos (Aplastodiscus perviridis) para ser identificada e que pode ser visualizada na Figura 5.1. A escolha deste anuro ocorreu pelo fato de já ser uma espécie encontrada e catalogada na região norte do Paraná (Bernarde e Machado, 2000).
78 77 Figura 5.1: Perereca-de-olhos-vermelhos (Rã-bugio, 2009) A distribuição geográfica desta espécie, segundo Amphibiaweb (2010), extende-se do sudeste do Brasil, da região de Brasília passando pelo sul do Rio Grande do Sul, até o extremo nordeste da Argentina. Esta espécie costuma ser encontrada em regiões de banhados e entornos (arbustos e capim alto), sempre próximas a ambientes florestados. Devido ao processo de colonização da região da bacia do Tibagi, estado do Paraná, ocorrido nos últimos anos, pode ter ocorrido o processo de extinção de algumas espécies associadas a este tipo de ambiente, daí a importância em sua monitoração. Em especial, a espécie estudada tem por outras características a reprodução em riachos e o sítio de vocalização em arbustos, durante o início e o meio de estações chuvosas, entre os meses de agosto a março (Bernarde e Machado, 2000). Os aspectos de implementação da aplicação de monitoração de anfíbios anuros são estabelecidos nesta seção em que são apresentados, em particular, os aspectos relacionados com o elemento de rede, o nó sensor e com a formação da rede. A plataforma sensora de propósito geral MicaZ foi utilizada para realizar a tarefa de monitoração de parâmetros do habitat e cálculo in locuo do Índice de Angstrom, para risco de incêndio. A esta plataforma foi acoplada uma placa sensora MTS420CA, por possuir os sensores de temperatura, umidade e luminosidade, como já descrita na seção A programação desse nó sensor foi realizada utilizando-se o kit de desenvolvimento
79 78 da Crossbow. Aliado à programação da plataforma sensora, foram realizados ajustes no mesmo para que pudesse ser realizado o cálculo do risco de incêndio, assim que as variáveis ambientais fossem obtidas pelos sensores. Para este experimento, este elemento de rede foi chamado apenas de nó sensor. Uma plataforma sensora MicaZ foi utilizada para realizar a tarefa de disseminação do resultado da identificação. Foi acoplada uma placa sensora MTS310CA a esta plataforma. A programação deste elemento da rede também foi realizado utilizando-se o kit de desenvolvimento da Crossbow, de tal modo que apenas o rádio da placa sensora fosse ligado, quando da disseminação do resultado da identificação do anuro. Esse elemento foi conectado ao kit de desenvolvimento Alvidi, contendo o microcontrolador AVR32, para o processamento acústico e foi chamado de MANA-M (ver Seção 4.1.1). A estação base foi composta utilizando-se uma plataforma sensora MicaZ acoplada a uma placa de interface e programação MIB510. Nenhuma placa sensora foi acoplada a plataforma MicaZ (ver Figura 4.3). A programação da plataforma sensora foi realizada utilizando-se o kit da Crossbow. Este conjunto foi conectado a um computador pessoal, tipo PC, via comunicação serial do tipo RS232. Esta estação base teve por objetivo o recebimento dos dados provenientes da rede e o seu devido armazenamento no banco de dados PostgreSQL, como descrito na seção Uma segunda estação base foi constituída, exclusivamente, para receber as informações da rede XBee. Essa estação foi chamada de nó coordenador. O nó coordenador é composto por uma placa de interface e programação e um módulo de rádio XBee (Digi, 2010). O nó coordenador foi programado utilizando-se o programa X-CTU, disponibilizado no kit de desenvolvimento da Digi. Esse programa também é responsável por verificar a rede XBee e imprimir em sua tela as informações recebidas pelos demais módulos XBee. O protocolo de roteamento escolhido para ser utilizado pelos nós sensores, para comunicação entre si e a estação base, foi o MultiHopRouter (Levis e Gay, 2009).
80 As faixas de frequência sonora que serviram de base para a comparação do algoritmo de identificação, foram obtidas utilizando-se o programa SonicVisualizer. Este programa 79 é de código fonte aberto e livre distribuição (Sonicvisualiser, 2009). O programa é executado sobre a plataforma Linux e utiliza-se de uma biblioteca FFT, denominada FFTW3 (FFTW, 2009), igualmente de código fonte aberto e de livre distribuição, para realizar a extração das características do sinal acústico. Os experimentos foram conduzidos de forma controlada, em laboratório, utilizando-se uma pequena coleção de gravações de áudio (quatro amostras distintas) contendo vocalizações da espécie de anuro escolhida (ver Seção 3.4.1), provenientes da Internet (Rã-bugio, 2009). As quatro amostras iniciais possuíam apenas a vocalização do anuro, sem qualquer tipo de interferência externa (como barulho de vento, chuva, etc). Visando aumentar o realismo dos experimentos e para efeito de comparação, a partir das amostras iniciais, foram adicionados barulho de chuva às amostras. Esse efeito deu origem a outras quatro amostras para a realização dos experimentos, tanto em ambiente Linux quanto no ambiente da rede proposta. Devido ao restrito número de elementos de rede funcionais disponíveis no laboratório de pesquisa, a rede foi constituída por duas unidades de nós sensores, uma unidade de nó sensor MANA-M e uma unidade de nó-base. Aos nós foi dada a tarefa de sensoriar o ambiente e enviar os dados para o nó-base que, por meio do aplicativo MoteView, recebia os dados e os armazenava no banco de dados PostgreSQL. Com base nesta formação, foram dispostos três cenários para as análises e comparações de resultados obtidos, referentes às variações na arquitetura do nó sensor MANA-M e nas amostras escolhidas, como será descrito na sequência. Em cada um dos cenários descritos foi aplicado o mesmo conjunto de parâmetros para a realização da FFT sobre o sinal acústico sensoriado pela rede. Os parâmetros são descritos na seção 5.1.4, subsequente à descrição dos cenários.
81 Cenário 1 O Cenário 1 caracterizou-se pelas configurações do nó sensor MANA-M (ver Figura 4.2). Foi utilizado um microfone acoplado diretamente à porta responsável pela aquisição dos dados para o ADC do co-processador, com a finalidade do sensoriamento acústico do ambiente. A fonte geradora do sinal é um computador PC executando as quatro amostras, sem ruído, de vocalização do anuro. Após o sensoriamento, os dados são lidos e interpretados pelo ADC do mesmo. Na sequência, o co-processador realiza a FFT sobre os dados, faz a extração das características de frequência das amostras sonoras e encaminha esses dados para o algoritmo de identificação. O algoritmo realiza uma análise nos dados e gera uma resposta que é retornada ao MicaZ, via comunicação USART. O MicaZ, por sua vez, lê a informação e a dissemina pela rede até chegar ao nó base. O nó base recebe a informação e a armazena no banco de dados Cenário 2 O Cenário 2 difere do Cenário 1 apenas na substituição ao comunicador do MicaZ por um módulo Xbee de comunicação de rádio sem fio. O algoritmo realiza uma análise nos dados e gera uma resposta que é retornada ao módulo de rádio XBee, via comunicação USART. O XBee, por sua vez, lê a informação e a dissemina pela rede até chegar ao nó coordenador 1. O nó coordenador recebe a informação e apenas a apresenta na tela do programa de escuta da rede XBee Cenário 3 O Cenário 3 utiliza-se das configurações encontradas no Cenário 1, porém substitui as amostras anteriores por um conjunto de amostras contendo barulho de chuva para se experimentar a precisão do algoritmo de identificação da espécie. 1 A rede XBee não se integra a rede MicaZ, portanto o resultado propagado para o coordenador foi apenas visualizado na tela do computador, por um aplicativo de leitura e gravação dos módulos XBee e não é armazenado no banco de dados.
82 Parâmetros para realização da FFT Em uma discussão inicial e de acordo com os resultados obtidos em testes realizados com o algoritmo de identificação de anuros em ambiente Linux, estipulou-se que as leituras do sinal ocorreriam em janelas de 512 pontos para a extração das características, pelo algoritmo, de cada amostra da vocalização. Mas, antes da fase de implementação, verificou-se a impossibilidade de aplicação de tal parâmetro, uma vez que o co-processador executa FFT em janelas de 4, 16, 256 ou 1024 pontos, segundo o fabricante. De acordo com essa informação, a fase de implementação iniciou-se com o esta- belecimento das janelas em 1024 pontos de análise, em 32-bits. As leituras em 1024 pontos garantiriam mais informações que o necessário para a execução do algoritmo de identificação ao custo de uma maior carga de processamento para o co-processador. Cada janela, anteriormente descrita, foi multiplicada pelo enjanelamento (windowing) de Hamming. Isso significa minimizar as margens de transição das amostras em formas de ondas truncadas, procurando-se reduzir as perdas espectrais. Após o enjanelamento foi aplicada a FFT, propriamente dita, no segmento do sinal de cada janela para, então, ser possível gerar um vetor de espectro de potência do sinal original. A partir desse vetor é que se poderão calcular as variáveis de frequência e amplitude do sinal original e fornecer os parâmetros necessários para a identificação do anuro. Todas as operações relacionadas à biblioteca DSP do co-processador foram executadas em ponto fixo, com números armazenados em Q_Format. Números em Q_Format são utilizados por processadores DSP para forçar a normalização quando da realização de cálculos de multiplicação, por exemplo, muito utilizados em processamento de sinais. O formato Q1.31 (32-bits) indica que o primeiro bit representa o sinal (positivo ou negativo) do número e os 31 bits seguintes armazenam um valor entre 0 e 1. Isso resulta um intervalo de dados entre 1 e -1. Outro resultado é uma otimização no tempo de execução do processador. Para efeito de comparação, uma operação entre vetores de 32-bits tende a gastar, aproximadamente, o dobro do tempo gasto por operações em 16-bits.
83 82 Com o vetor de espectro de potência constituído realizou-se operações aritméticas sobre seus valores para a obtenção de um novo vetor de frequência e amplitude. Esse novo vetor, conhecido por espectrograma, foi útil para visualizar como as frequências e amplitudes variaram no decorrer do tempo. Da análise do espectrograma foi possível retirar as informações referentes aos picos de amplitude e os harmônicos do sinal amostrado. Essas informações sobre o registro vocal do anuro caracterizam a individualidade do animal e a qual espécie pertence (apresentado na seção 5.1). Com isso, o passo seguinte foi aplicar um algoritmo de ordenação ao vetor do espectrograma. Essa ordenação foi necessária para a correta aplicação do algoritmo de identificação do anuro. Quando o algoritmo de identificação foi inserido ao código final do co-processador houve a necessidade em se realizar alterações na implementação do algoritmo de FFT e de identificação. Entretanto, o código final compilado não coube no espaço de memória disponibilizado pelo microcontrolador. Isso obrigou a que fossem realizadas alterações no tamanho da pilha de memória do microcontrolador, mas as alterações haviam de obedecer a necessidade em se preservar um espaço mínimo obrigatório para o funcionamento da pilha de memória do microcontrolador. Um caso especial que se utiliza muito deste espaço é o algoritmo de ordenação do vetor, contendo as amplitudes e frequências do sinal amostrado, por ter um funcionamento recursivo. 5.2 Resultados e Discussões Nos experimentos iniciais foi utilizado o nó sensor MicaZ para realizar o sensoriamento acústico e encaminhamento dos dados não processados para o AVR32. Entretanto, os limitados recursos de amostragem (ADC/clock) do MicaZ dificultaram a obtenção de uma amostragem mínima necessária para a identificação do anuro. Para uma amostragem a Hz, frequência esta relativamente superior ao necessário para detectar o anuro, são necessários 1s/11050
84 83 amostras 9,05 x 10e-5 s. Isto implica na necessidade de realizar 0,09 ms/amostra, algo por volta de 10 vezes mais do que a capacidade de amostragem do MicaZ. Segundo o fabricante, a resolução hipotética máxima de tempo do ADC do Micaz é de 1 ms. Desta forma, é possível realizar 1000 amostragens/segundo, equivalente a 1KHz. Assim, de acordo com Teorema de Nyquist (ver seção 3.3), 500 Hz é a frequência máxima que o MicaZ pode representar de um sinal analógico sem alterar o código fonte do Tinyos. Esse valor é insuficiente para identificar a frequência do anuro. Uma solução para este problema foi utilizar o AVR32 para receber o som e usar seu ADC para realizar as amostragens, devido a sua capacidade para a aplicação proposta. O ADC do AVR32 realiza amostragens em até 22 KHz, isto implica em representar fontes acústicas reais de até 11 KHz e na eliminação do overhead de comunicação. Logo, o MicaZ torna-se útil para disseminar o resultado do processamento na rede, pois não precisa disseminar conteúdo multimídia (amostras de som) pela rede, especialmente se o nó base estiver longe e for necessário mais que um salto para propagar os dados. Na fase de implementação do código para o AVR32 a configuração/programação do ADC foi feita via controle DMA. Este tipo de implementação desvincula a fase de aquisição dos dados acústicos pela ADC do processamento pelo microcontrolador, impactando em uma economia de recursos e de energia, além de permitir que o microcontrolador possa realizar alguma outra tarefa que venha a ser necessária, em concorrência aos períodos de amostragem da captura acústica pelo ADC. Devido às técnicas e soluções adotadas para a implementação do algoritmo de FFT, do algoritmo de identificação do anuro, bem como da aquisição dos dados, via ADC, o código final compilado impactou no uso pleno do espaço de memória do microcontrolador. De outra forma, os 32 Kbytes disponíveis foram completamente utilizados pela solução, sendo que houve a necessidade em se reduzir o tamanho da pilha memória do microcontrolador, de 4 kb para apenas 1,5 Kb. Na Figura 5.2 são apresentadas duas imagens contendo o espectrograma (esquerda) e a waveform (direita) para uma amostra da vocalização do anuro. Nesta imagem, à esquerda, é

85 84 possível verificar, em tom mais transparente, as faixas dos picos de frequência da vocalização. Ainda nesta imagem, à direita, é possível verificar as waveforms correspondentes à mesma vocalização do anuro. São estas faixas que o algoritmo de identificação deverá reconhecer corretamente. Figura 5.2: Espectrograma e waveform de uma amostra, sem ruído, registrado por meio do programa SonicVisualiser Ainda na Figura 5.2 (esquerda), os picos de frequência podem ser observados aparecendo em intensidade luminosa próxima da cor alaranjada. Na mesma faixa de frequência podem ser encontrados os harmônicos, vistos em intensidade luminosa próxima da cor verde clara. Quando os picos de frequência do anuro são encontrados, juntamente com seus harmônicos, em um mesmo inervalo de tempo, então se tem a resposta Achou anuro. Se, em um mesmo intervalo, forem encontrados os picos de frequência, mas não forem encontrados seus harmônicos, então a resposta é de Imprecisão. Caso não sejam detectados nem os picos de frequência e nem os harmônicos, então o algoritmo responde Não detectado. Um computador, do tipo PC, foi utilizado para executar as oito amostras, com a finalidade de reproduzir o som do anuro para ser captado pelo microfone do nó sensor, conforme descrito nos Cenários 1, 2 e 3. Para a realização do processamento acústico para as amostras e características do Cenário 1, o MANA-M consumiu 812 µs para inicializar o sistema (boot). Na sequência, consumiu 319 µs para a estabilização do sistema. Após a estabilização do sistema, então o ADC realiza a amostragem dos sons, consumindo cerca de 615 µs ao fim da leitura sobre todas as entradas. As tarefas de aplicar a FFT sobre as amostras e gerar o vetor de áudio para as análises consumiram 361 µs. Por sua vez, o algoritmo de identificação consumiu 268 µs para ordenar o vetor de
 do sistema até a resposta final do algoritmo.")
86 85 áudio e analisar os valores armazenados no mesmo e retornar uma resposta. Todas as amostras de vocalização foram reconhecidas pelo algoritmo. Assim, o tempo total gasto por este sistema foi de 2,3 ms, a contar do tempo de inicialização (boot) do sistema até a resposta final do algoritmo. Esses valores foram obtidos inserindo-se no código do microcontrolador contadores de ciclos de clock. Esses contadores são disponibilizados pelo conjunto de instruções do microcontrolador. Nesse conjunto incluem funções que transformam a contagem dos ciclos em µs ou ms. Se for desconsiderado o tempo de boot, que é realizado apenas uma vez, o microcontrolador terá gasto 1,6 ms para realizar outro conjunto de amostragem/identificação. Desta forma, têm-se um valor aproximado de consumo de processamento de 59,8 ma, para o tempo total de processamento incluindo-se a inicialização do sistema, e um gasto de 41,6 ma, para o tempo de processamento sem incluir o tempo de inicialização do sistema. Ainda sobre o consumo de energia, os custos das transmissões das unidades de rádio (CC2420 e XBee) são apresentados em forma de comparativos entre os gastos energéticos do rádio do MicaZ (CC2420) e do XBee, ambos em frequência de 2,4 GHz. Nas Figuras 5.3 e 5.4 é possível observar um comparativo relativo aos modos idle/sleep e transmissão/recepção, respectivamente, de acordo com os dados dos respectivos fabricantes. Figura 5.3: Consumo de energia em modo idle/sleep, em µa

87 86 Figura 5.4: Consumo de energia em modo transmissão/recepção, em ma Observando-se o consumo dos rádios da MicaZ e do XBee, na Figura 5.4, verifica-se que o consumo energético com o processamento local do áudio ficou inferior ao custo com o envio de cada amostra de áudio para que outro nó sensor realize o processamento. A codificação do áudio das amostras é expressa por: taxa de amostragem: Hz = bytes/s; quantidade de canais: 2 e tamanho da amostra: 0,7s Utilizando-se os valores de referência anteriormente descritos, a quantidade de bytes que a unidade de rádio necessita enviar é dado por: bytes/s x 2(canais) = bytes/s x 0,7s = bytes a serem transferidos pelo rádio do MicaZ. Em potência máxima, a unidade de rádio do MicaZ consegue transmitir a uma taxa de 250 kbits/s = bytes/s. Isso implica dizer que o MicaZ gastará 0,5s para transmitir todo o volume de dados, ao custo de 0,5s x 17,4 ma/s de transmissão e de 0,5s x 19,7 ma/s de recepção. O resultado é um consumo de, aproximadamente, 8,28 ma para a transmissão completa da amostra e de 9,85 ma para recepção dos dados por outro nó. Já para a unidade de rádio XBee os valores ficaram ainda maiores, com consumo de 0,5s x 75 ma/s de transmissão, resultando em um consumo de 37,5 ma apenas para transmitir a amostra para outro nó sensor processar.
 e os custos de processamento destas mesmas amostras pelo Mana-m, um incluindo-se")
88 87 Relacionando-se os valores obtidos com os custos de transmissão e de processamento para as amostras de áudio, têm-se a geração do gráfico da Figura 5.5. O gráfico expressa o custo de transmissão de cada amostra de áudio pelas unidades de rádio Xbee e do MicaZ (CC2420) e os custos de processamento destas mesmas amostras pelo Mana-m, um incluindo-se o tempo de inicialização (boot) e o outro sem o tempo de inicialização. Figura 5.5: Relacionamento do consumo de energia entre transmissão e processamento dos dados. Ao se aplicar RSSF em ambientes naturais têm-se a sujeição desta rede às mais diversas intempéries, tais como, o ruído, a chuva, ventos, que podem vir a prejudicar os serviços de monitoração do habitat e da identificação da espécie. Testes em ambiente externo não foram conduzidos, mas é possível inferir que se faz necessária a blindagem dos dispositivos eletrônicos, com a finalidade de proteção de seus circuitos e componentes eletrônicos, de ações como radiação solar, umidade local, entre outros fatores, para um correto funcionamento do nó sensor, visando a sua utilização por longos períodos de tempo.
89 88 CAPÍTULO 6 Conclusões e Trabalhos Futuros 6.1 Conclusões Apesar da grande quantidade de trabalhos de pesquisa e dos avanços científicos na área de RSSF muitos resultados são obtidos apenas por meio de simulações. As simulações computacionais podem ser uma ferramenta auxiliar para que pesquisas obtenham resultados próximos aos reais. Com um baixo custo, permitem a execução de experimentos que podem envolver riscos de magnitudes inesperadas sem ocasionar quaisquer danos materiais. Porém, quando é proposto e montado um protótipo em ambiente real utilizando-se de dispositivos reais, no caso desta dissertação os nós sensores, nem todos os resultados obtidos em simulação podem ser validados, tais como falhas mecânicas em baterias, aquecimento ou resfriamento de baterias (que podem influenciar no resultado de um sensoriamento), de intempéries climáticas, interferências externas (fontes de ruído, radiação, elétricas), interferências de animais (formação de uma colméia na antena do nó sensor), são alguns exemplos. O ambiente idealizado pode implicar em simulações com resultados, de certa forma, um pouco distantes de um ambiente real de monitoração, cujos cenários possuem uma grande
90 89 quantidade de fenômenos e intempéries a que ficam suscetíveis os elementos de rede, tais como citados anteriormente. Além disso, a montagem de protótipos de RSSF para aplicações em ambientes reais não é uma tarefa trivial. Coletar sinais acústicos específicos e particulares ao anfíbio anuro em seu habitat natural faz com que se adquira, inclusive, ruídos e outros sons do ambiente. A utilização de RSMSF em aplicações acústicas requer o uso de elementos de rede com maior poder computacional e, de certo modo, implicando em maior consumo energético e maior custo agregado aos nós sensores mais simples. Entretanto, esse tipo de aplicação permite uma extração mais ampla das características do ambiente, com consequente diminuição na utilização dos módulos de rádio para o envio dos dados não processados para outro nó que possua a capacidade de fazê-lo. Em função do número restrito de nós disponibilizados nos experimentos deste trabalho, não se pôde avaliar todos os problemas relacionados ao controle de acesso ao meio, perdas e atrasos, bem como o consumo de energia total da solução, por exemplo. Neste último caso, os nós não apresentam sensor de corrente o que impediu a medição da energia residual. Mesmo que os nós tivessem sensor de corrente a medição de energia residual poderia se transformar em consumo. Isto é conhecido como problema de ponta de prova em RSSF. Contudo, neste trabalho foi possível calcular, via software, o consumo aproximado do processamento realizado pelo microcontrolador. Ainda com relação ao consumo de energia, ao se confrontar os gastos com o processamento de 0,7s de áudio (de cada amostra) e o envio deste mesmo áudio não processado por rádio, pelo nó sensor MANA-M e pelo rádio do nó sensor MicaZ, respectivamente, têm os valores de 41,6 ma para o processamento e 18,13 ma para a transmissão e recepção, utilizando-se o mesmo tipo de rádio (CC2420). Se levar em consideração a quantidade de saltos necessários para se transmitir essa informação até um nó sensor, ou estação base, para se processá-lo, a partir do segundo salto já se torna mais vantajoso processar os dados acústicos localmente do que transmiti-los para outra plataforma sensora processá-los. De outra forma, quanto maior a
91 90 quantidade de elementos e mais distantes de um nó base capaz de processar áudio, mais se torna interessante a capacidade de processá-los localmente. O microcontrolador proposta para a montagem do MANA-M satisfez aos requisitos da aplicação, porém se faz necessário a comparação destes resultados com toda a implementação voltada para 16 bits a fim de avaliar os benefícios ou não de uma menor precisão na manipulação dos dados. Ainda sobre a versão do microcontrolador, o limitado espaço da memória de programa não permitiria a ampliação da solução proposta para a inclusão de tarefas de classificação de outras espécies de anuros, em conjunto à identificação e/ou contagem de indivíduos únicos de uma determinada de espécies. Haveria a necessidade em se substituir a versão avaliada por outra versão, que neste caso seria a UC3B0512, contendo 96 Kbytes de memória de programa e 512 Kbytes de memória Flash. Mesmo assim, o algoritmo de identificação obteve desempenho de forma satisfatória, com índices de eficácia na detecção do anuro de 100% para as amostras sem ruído. Por outro lado, para as amostras contendo ruído de chuva os valores obtidos ficaram em 50% de detecção, resultado este que pode ser melhorado com a aplicação de novas técnicas. A visualização das informações da rede foram dispostas sob forma de implementação da uma ferramenta (site) de acompanhamento da área de monitoração. Uma ferramenta como esta auxilia pesquisadores (biólogos, ecólogos e de outras áreas no estudo de ambientes naturais) no fornecimento de dados, especialmente em tempo real, que possam ser utilizados em pesquisas. Ao se aplicar RSSF em ambientes reais têm-se a sujeição desta rede a fatores externos que podem vir a prejudicar os serviços de monitoração do habitat e da identificação da espécie. Isto pôde ser comprovado nos testes, mesmo que preliminarmente em um ambiente controlado como o de um laboratório, utilizando-se amostras de vocalização do anuro com ruído de chuva ao fundo e sem esse ruído. A partir desta e das comprovações anteriores também se conclui que se faz necessária a blindagem dos dispositivos eletrônicos, com a finalidade de proteção de seus circuitos e componentes eletrônicos, de ações como radiação solar, umidade local, entre outros fatores.
92 Trabalhos Futuros Como indicativo de pesquisas futuras que visem agregar funcionalidades e estender este trabalho se encontram a necessidade de se aplicar filtros de áudio, ao sinal amostrado, com a finalidade de eliminação de faixas de frequências sonoras que excedam o espectro acústico de identificação dos anuros. A possibilidade de implementação de um banco de dados de texto, armazenado em memória Flash do AVR32, para fins de comparações na fase de identificação de anuros, extendendo esta solução para a modalidade de classificação de anuros. Todavia, se faz necessária a mudança da atual versão do microcontrolador avaliado para a versão UC3B0512, que possui 96 Kbytes de memória de programa e 512 Kbytes de memória Flash, porém com a mesma velocidade de clock da versão avaliada. Utilização da técnica de wavelets para a extração das informações do sinal acústico, com a finalidade de se ampliar a extração de características do sinal acústico e diminuir o custo de processamento do microcontrolador, com consequente diminuição de consumo dos recursos energéticos do nó sensor. Também a utilização de protocolos e técnicas de compressão de dados multimídia, para se avaliar, com maior precisão, os impactos causados na rede do tráfego de dados multimídia pelos nós sensores e pela rede. Inclusão de outros sensores para grandezas climáticas, tais como vento, pluviosidade, radiação solar, ph da água, gases, entre outros, com a finalidade de obtenção de novos índices de correlação de dados e análise ambiental mais profunda. Por fim, a possibilidade de estudos, testes e comparações com outros microcontroladores DSP de 16 bits e 32 bits, de baixo consumo energético. 6.3 Reconhecimentos Este trabalho é parte integrante de pesquisas realizadas pelo Grupo Manna-UEM no contexto do INCT-NAMITEC (Instituto Nacional de Ciência e Tecnologia de Sistemas Micro e Na-
93 92 noeletrônicos), relativo à área A.1.1.-RSSF aplicada à monitoração de anfíbios 1 e que, a partir deste trabalho inicial, outros pesquisadores farão seus projetos de circuitos integrados em termos de processadores, antenas, sensores, entre outros. Este trabalho também obteve suporte financeiro, em partes, pela Fundação Araucária de Apoio ao Desenvolvimento Científico e Tecnológico do Paraná, pelo Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq) e pelo próprio INCT-NAMITEC. 1 Acessível em:
94 REFERÊNCIAS AKKAYA, K.; YOUNIS, M. A survey on routing protocols for wireless sensor networks. Ad Hoc Networks, v. 3, n. 3, p , AKYILDIZ, I. F.; MELODIA, T.; CHOWDHURY, K. R. A survey on wireless multimedia sensor networks. Comput. Netw., v. 51, n. 4, p , ALEMDAR, H.; ERSOY, C. Wireless sensor networks for healthcare: A survey. Comput. Netw., v. 54, p , ALVIDI Alvidi data sheet. [On-line]. Disponível em (Último Acesso em novembro/2009) AMPHIBIAWEB Amphibiaweb - aplastodiscus perviridis. [On-line]. Disponível em Aplastodiscus&where-species=perviridis (Último Acesso em junho/2010) ANASTASI, G.; CONTI, M.; DI FRANCESCO, M.; PASSARELLA, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw., v. 7, p , AQUINO, A. D.; FIGUEIREDO, C.; LOUREIRO, A.; MINI, R.; NAKAMURA, E.; DE OLIVEIRA, H.; RUIZ, L. Redes de sensores sem fio para monitoramento de anfíbios. In: CharLa 08: Proceedings of Grand Challenges in Computer Science Research in Latin America Workshop 2008, Buenos Aires, Argentina, ARDUINO Arduino. [On-line]. Disponível em (Último Acesso em fevereiro/2010) ATMEL All 32 bits microcontrollers. [On-line]. Disponível em pdf (Último Acesso em maio/2009)
95 94 ATMEL Atmel corporation. [On-line]. Disponível em (Último Acesso em abril/2009) ATMEL Avr software framework. [On-line]. Disponível em category_id=163&family_id=607&subfamily_id=2138&part_id=4174 (Último Acesso em maio/2009) ATMEL Avr32 uc3 microcontrollers. [On-line]. Disponível em pdf (Último Acesso em maio/2009) BARRENETXEA, G.; INGELREST, F.; SCHAEFER, G.; VETTERLI, M. networks for environmental monitoring: The sensorscope experience. Wireless sensor In: 2008 IEEE International Zurich Seminar on Communications, 2008, p BERNARDE, P. S.; MACHADO, R. A. Riqueza de espécies, ambientes de reprodução e temporada de vocalização da anurofauna em três barras do paraná, brasil (amphibia: Anura). Cuadernos de Herpetologia, v. 14, n. 2, p , BHATTI, S.; CARLSON, J.; DAI, H.; DENG, J.; ROSE, J.; SHETH, A.; SHUCKER, B.; GRUENWALD, C.; TORGERSON, A.; HAN, R. Mantis os: an embedded multithreaded operating system for wireless micro sensor platforms. Mob. Netw. Appl., v. 10, p , BOGGIA, G.; CAMARDA, P.; GRIECO, L.; PALATTELLA, M. Fire detection using wireless sensor networks: An approach based on statistical data modeling. In: New Technologies, Mobility and Security, NTMS 08., 2008, p BTNODES Btnodes - a distributed environment for prototyping ad hoc networks. [On-line]. Disponível em (Último Acesso em junho/2009)
96 95 CAMPBELL, J.; GIBBONS, P. B.; NATH, S.; PILLAI, P.; SESHAN, S.; SUKTHANKAR, R. Irisnet: an internet-scale architecture for multimedia sensors. In: MULTIMEDIA 05: Proceedings of the 13th annual ACM international conference on Multimedia, New York, NY, USA: ACM, 2005, p CAREY, C.; HEYERV, W. R.; WILKINSON, J.; ALFORD, R. A.; ARNTZEN, J. W.; HALLIDAY, T.; HUNGERFORD, L.; LIPS, K. R.; MIDDLETON, E. M.; ORCHARD, S. A.; RAND, A. S. Amphibian declines and environmental change: Use of remote-sensing data to identify environmental correlates. Conservation Biology, v. 15, n. 4, p , CORKE, P. Fos - a new operating system for sensor networks. In: EWSN08: Proceedings of the 5th European Conference on Wireless Sensor Networks, Bologna, Italy, 2008, p. 2. COSTA, N.; FERREIRA, F.; SANTOS, N.; PEREIRA, A. Wsnet winecellar an evolutionary wireless sensor network to monitor wine-cellars. In: ICSNC 07: Proceedings of the Second International Conference on Systems and Networks Communications, Washington, DC, USA: IEEE Computer Society, 2007, p. 81. CROSSBOW Wireless sensor networks - products reference guide. [On-line]. Disponível em (Último Acesso em março/2009) CROSSBOW ēko datasheet. [On-line]. Disponível em (Último Acesso em fevereiro/2010) CSIRO Csiros smart sensor network technology. [On-line]. Disponível em html (Último Acesso em outubro/2009) CSIRO Sensor and sensor networks research progress report: July 2007 to june [On-line]. Disponível em html (Último Acesso em outubro/2009)
97 96 DANG, T.; BULUSU, N.; HU, W. Lightweight acoustic classification for cane-toad monitoring. In: Signals, Systems and Computers, nd Asilomar Conference on, 2008, p DIGI Digi international. [On-line]. Disponível em (Último Acesso em novembro/2010) DODD, C. K. Monitoring amphibians in great smoky mountains national park. U.S. Department of the Interior / U.S. Geological Survey - Circular 1258, 127 p., DUBOIS-FERRIÈRE, H.; FABRE, L.; MEIER, R.; METRAILLER, P. Tinynode: a comprehensive platform for wireless sensor network applications. In: IPSN 06: Proceedings of the 5th international conference on Information processing in sensor networks, New York, NY, USA: ACM, 2006, p DUTTA, P.; CULLER, D. Epic: An open mote platform for application-driven design. In: Information Processing in Sensor Networks, IPSN 08. International Conference on, 2008, p DUTTA, P.; TANEJA, J.; JEONG, J.; JIANG, X.; CULLER, D. A building block approach to sensornet systems. In: Proceedings of the 6th ACM conference on Embedded network sensor systems, SenSys 08, New York, NY, USA: ACM, 2008, p (SenSys 08, ). ECLIPSE Eclipse. [On-line]. Disponível em (Último Acesso em setembro/2009) EPSTEIN, M. J. Growing an interdisciplinary hybrid: The case of acoustic ecology. History of Intellectual Culture, v. 3, n. 1, EVK1101 Atmel evk1101. [On-line]. Disponível em (Último Acesso em maio/2009)
98 97 FERNÁNDEZ-LUQUE, F.; ZAPATA, J.; RUIZ, R.; IBORRA, E. A wireless sensor network for assisted living at home of elderly people. In: Proceedings of the 3rd International Work-Conference on The Interplay Between Natural and Artificial Computation: Part II: Bioinspired Applications in Artificial and Natural Computation, IWINAC 09, Berlin, Heidelberg: Springer-Verlag, 2009, p (IWINAC 09, ). FERREIRA, G. D. A. Ecologia acústica utilizando rede de sensores sem fio. Monografia do Trabalho de Conclusão de Curso apresentado em Banca Examinadora do Curso de Ciência da Computação da Universidade Estadual de Maringá, FFTW Fftw. [On-line]. Disponível em (Último Acesso em novembro/2009) FIREFLY Firefly wsn platform. [On-line]. Disponível em (Último Acesso em outubro/2009) GAGE, S.; UMMADI, P.; SHORTRIDGE, A.; QI, J.; JELLA, P. K. Using gis to develop a network of acoustic environmental sensors. In: Proceedings of the Twenty-Fourth Annual ESRI User Conference, San Diego, California: ESRI, 2004, p GAY, D.; LEVIS, P.; VON BEHREN, R.; WELSH, M.; BREWER, E.; CULLER, D. The nesc language: A holistic approach to networked embedded systems. SIGPLAN Not., v. 38, p. 1 11, GERHARDT, H. C.; HUBER, F. Acoustic communication in insects and anurans: common problems and diverse solutions. University of Chicago Press, 531 p., GIROD, B.; AARON, A.; RANE, S.; REBOLLO-MONEDERO, D. Distributed video coding. Proceedings of the IEEE, v. 93, n. 1, p , GRAPS, A. An introduction to wavelets. Computational Science Engineering, IEEE, v. 2, n. 2, p , 1995.
99 GU, L.; JIA, D.; VICAIRE, P.; YAN, T.; LUO, L.; TIRUMALA, A.; CAO, Q.; HE, 98 T.; STANKOVIC, J. A.; ABDELZAHER, T.; KROGH, B. H. Lightweight detection and classification for wireless sensor networks in realistic environments. In: Proceedings of the 3rd international conference on Embedded networked sensor systems, SenSys 05, New York, NY, USA: ACM, 2005, p (SenSys 05, ). GÜRSES, E.; AKAN, Ö. B. Multimedia communication in wireless sensor networks. Annales des Télécommunications, v. 60, n. 7-8, p , HAN, C.-C.; KUMAR, R.; SHEA, R.; KOHLER, E.; SRIVASTAVA, M. A dynamic operating system for sensor nodes. In: MobiSys 05: Proceedings of the 3rd international conference on Mobile systems, applications, and services, New York, NY, USA: ACM Press, 2005, p HENNESSY, J. L.; PATTERSON, D. A. Computer architecture: A quantitative approach. 3 ed. San Francisco, CA, USA: Morgan Kaufmann Publishers Inc., HILL, J.; HORTON, M.; KLING, R.; KRISHNAMURTHY, L. The platforms enabling wireless sensor networks. Commun. ACM, v. 47, n. 6, p , HU, W.; BULUSU, N.; CHOU, C. T.; JHA, S.; TAYLOR, A.; TRAN, V. N. Design and evaluation of a hybrid sensor network for cane toad monitoring. ACM Trans. Sen. Netw., v. 5, n. 1, p. 1 28, HU, W.; TRAN, V. N.; BULUSU, N.; CHOU, C. T.; JHA, S.; TAYLOR, A. The design and evaluation of a hybrid sensor network for cane-toad monitoring. In: IPSN 05: Proceedings of the 4th international symposium on Information processing in sensor networks, Piscataway, NJ, USA: IEEE Press, 2005, p. 71. HUANG, Y. M.; HSIEH, M. Y.; CHAO, H. C.; HUNG, S. H.; PARK, J. H. Pervasive, secure access to a hierarchical sensor-based healthcare monitoring architecture in wireless heterogeneous networks. IEEE J.Sel. A. Commun., v. 27, p , 2009.
100 99 IBRAHIM, A. E.; ZHAO, L.; KINGHORN, J. Embedded systems development: Quest for productivity and reliability. In: Proceedings of the Fifth International Conference on Commercial-off-the-Shelf (COTS)-Based Software Systems, Washington, DC, USA: IEEE Computer Society, 2006, p. 23. KARLOF, C.; WAGNER, D. Secure routing in wireless sensor networks: attacks and countermeasures. In: Sensor Network Protocols and Applications, Proceedings of the First IEEE IEEE International Workshop on, 2003, p KEW, H.-P.; JEONG, D.-U. Wearable patch-type ecg using ubiquitous wireless sensor network for healthcare monitoring application. In: Proceedings of the 2nd International Conference on Interaction Sciences: Information Technology, Culture and Human, ICIS 09, New York, NY, USA: ACM, 2009, p (ICIS 09, ). LEVIS, P.; GAY, D. Tinyos programming. Cambridge University Press; 1 edition, 280 p., LEWINSOHN, T. M.; PRADO, P. I. Biodiversidade brasileira: Síntese do estado atual do conhecimento. Contexto, 176 p., LIBELIUM Guides and technical information - waspmote datasheet. [On-line]. Disponível em (Último Acesso em fevereiro/2010) LIBELIUM Squidbee datasheet. [On-line]. Disponível em (Último Acesso em fevereiro/2010) LIMA, A. P.; MAGNUSSON, W. E.; MENIN, M.; RODRIGUES, D. D. J.; ERDTMANN, L. K.; KELLER, C.; HÖDL, W. Guia de sapos da reserva adolpho ducke, amazônia central = guide to the frogs of reserva adolpho ducke, central amazonia. Áttema Design Editorial, Manaus, 168 p., 2006.
101 100 LOPES, C. E. R. Uma rede de sensores sem fio multicamada, multimodal para monitoração ambiental. Dissertação de Mestrado, Escola de Engenharia - Universidade Federal de Minas Gerais, Belo Horizonte - Minas Gerais, LOUREIRO, A. A. F.; NOGUEIRA, J. M. S.; RUIZ, L. B.; DE FREITAS MINI, R. A.; NAKAMURA, E. F.; FIGUEIREDO, C. M. S. Redes de sensores sem fio. Simpósio Brasileiro de Redes de Computadores, p , LYONS, R. G. Understanding digital signal processing. Prentice Hall PTR, 688 p., MACEDO, D. F.; CORREIA, L. H. A.; DOS SANTOS, A. L.; LOUREIRO, A. A. F.; NOGUEIRA, J. M. S. Um protocolo de roteamento configurável baseado em regras para redes de sensores sem fio. In: XXIII Simpósio Brasileiro de Redes de Computadores, Fortaleza, CE, Brasil, 2005, p MAINWARING, A.; CULLER, D.; POLASTRE, J.; SZEWCZYK, R.; ANDERSON, J. Wireless sensor networks for habitat monitoring. In: WSNA 02: Proceedings of the 1st ACM international workshop on Wireless sensor networks and applications, New York, NY, USA: ACM, 2002, p MOORE, D. Demonstration of bird species detection using an acoustic wireless sensor network. In: Local Computer Networks, LCN rd IEEE Conference on, 2008, p MORAIS, R.; FERNANDES, M. A.; MATOS, S. G.; SERÔDIO, C.; FERREIRA, P. J. S. G.; REIS, M. J. C. S. A zigbee multi-powered wireless acquisition device for remote sensing applications in precision viticulture. Comput. Electron. Agric., v. 62, p , NACHMAN, L.; HUANG, J.; SHAHABDEEN, J.; ADLER, R.; KLING, R. Imote2: Serious computation at the edge. In: Wireless Communications and Mobile Computing Conference, IWCMC 08. International, 2008, p
102 NAUMOWICZ, T.; FREEMAN, R.; HEIL, A.; CALSYN, M.; HELLMICH, E.; BRÄNDLE, 101 A.; GUILFORD, T.; SCHILLER, J. Autonomous monitoring of vulnerable habitats using a wireless sensor network. In: REALWSN 08: Proceedings of the workshop on Real-world wireless sensor networks, New York, NY, USA: ACM, 2008, p OLIVEIRA, A. S. D.; ANDRADE, F. S. D. Sistemas embarcados: Hardware e firmware na prática. Editora Érica, São Paulo, 316 p., OLIVER, R. S.; SHCHERBAKOV, I.; FOHLER, G. An operating system abstraction layer for portable applications in wireless sensor networks. In: Proceedings of the 2010 ACM Symposium on Applied Computing, SAC 10, New York, NY, USA: ACM, 2010, p (SAC 10, ). PAUL, T.; KUMAR, G. S. Safe contiki os: Type and memory safety for contiki os. In: Proceedings of the 2009 International Conference on Advances in Recent Technologies in Communication and Computing, ARTCOM 09, Washington, DC, USA: IEEE Computer Society, 2009, p (ARTCOM 09, ). POSTGRESQL Postgresql. [On-line]. Disponível em (Último Acesso em novembro/2010) PRICE, S. J.; HOWE, R. W.; HANOWSKI, J. M.; REGAL, R. R.; NIEMI, G. J.; SMITH, C. R. Are anurans of great lakes coastal wetlands reliable indicators of ecological condition. Journal of Great Lakes Research, v. 33, n. sp3, p , RÃ-BUGIO, I. Instituto rã-bugio para conservação da biodiversidade. [On-line]. Disponível em (Último Acesso em outubro/2009) REDDY, P. G.; SRIDHAR, N. Lakon: a middle-ground approach to high-frequency data acquisition and in-network processing in sensor networks. In: IPSN 10: Proceedings of the 9th ACM/IEEE International Conference on Information Processing in Sensor Networks, New York, NY, USA: ACM, 2010, p
103 102 RUIZ, L. B. Manna: A management architecture for wireless sensor network. Tese de Doutoramento, Departamento de Ciência da Computação, Universidade Federal de Minas Gerais, Belo Horizonte - Minas Gerais, RUIZ, L. B.; CORREIA, L. H. A.; VIEIRA, L. F. M.; MACEDO, D. F.; NAKAMURA, E. F.; FIGUEIREDO, C. M. S.; VIEIRA, M. A. M.; MECHELANE, E. H.; CAMARA, D.; LOUREIRO, A. A.; NOGUEIRA, J. M. S.; DA SILVA JR., D. C. Arquiteturas para redes de sensores sem fio. In: XXII Simpósio Brasileiro de Redes de Computadores, Gramado, RS, Brasil, SHUKLA, S.; BULUSU, N.; JHA, S. Cane-toad monitoring in kakadu national park using wireless sensor networks. In: in Proceedings of APAN, Cairns, Australia, SILVA, R. A.; MARTINS, I. A.; ROSSA-FERES, D. D. C. Bioacústica e sítio de vocalização em taxocenoses de anuros de área aberta no noroeste paulista. Biota Neotrop., v. 8, n. 3, p , SILVANO, D. L.; SEGALLA, M. V. Conservação de anfíbios no brasil. Megadiversidade, v. 1, n. 1, p , SMITH, S. W. Digital signal processing: A practical guide for engineers and scientists. Newnes (Elsevier Science), 650 p., SONICVISUALISER Sonic visualiser. [On-line]. Disponível em (Último Acesso em novembro/2009) SPARKFUN Breakout board for electret microphone. [On-line]. Disponível em (Último Acesso em dezembro/2010) STEFANI, F. D. Sistema di monitoraggio ambientale tramite wsn. Dissertação de Mestrado, Corso di Laurea Specialistica in Ingegneria Informatica, Università degli Studi di Pavia - Facoltà di Ingegneria, Itália, 2008.
104 STRANG, G. Wavelet transforms versus fourier transforms. Bulletin of the American Mathematical Society, v. 28, n. 2, p , SURI, A.; IYENGAR, S.; CHO, E. Ecoinformatics using wireless sensor networks: An overview. Ecological Informatics, v. 1, n. 3, p , 4th International Conference on Ecological Informatics, TAYLOR, A.; WATSON, G.; GRIGG, G.; MCCALLUM, H. Monitoring frog communities: an application of machine learning. In: Proceedings of the 8th Innovative Applications of Artificial Intelligence Conference. Portland Oregeon: AAAI, 1996, p TOLLE, G.; POLASTRE, J.; SZEWCZYK, R.; CULLER, D.; TURNER, N.; TU, K.; BURGESS, S.; DAWSON, T.; BUONADONNA, P.; GAY, D.; HONG, W. A macroscope in the redwoods. In: Proceedings of the 3rd international conference on Embedded networked sensor systems, SenSys 05, New York, NY, USA: ACM, 2005, p (SenSys 05, ). VIELLIARD, J. M. E.; DA SILVA, M. L. A bioacústica como ferramenta de pesquisa em comportamento animal. In: Estudos do Comportamento II. Grauben Assis, Regina Brito e William Lee Martin (eds.), YICK, J.; MUKHERJEE, B.; GHOSAL, D. Wireless sensor network survey. Computer Networks, v. 52, n. 12, p , 2008.

105 104 ANEXO A Conjunto de Instruções Para o Microcontrolador AVR32UC3B Tabela A.1: Operações aritméticas
106 Tabela A.2: Operações de multiplicação 105

107 Tabela A.3: Operações DSP 106

108 107 Tabela A.4: Operações Tabela A.5: Operações Lógicas

109 108 Tabela A.6: Operações Bit Tabela A.7: Operações Move/Load Imediato

110 109 Tabela A.8: Operações Fluxo de Instrução Tabela A.9: Dados Múltiplos

111 Tabela A.10: Operações Load/Store 110
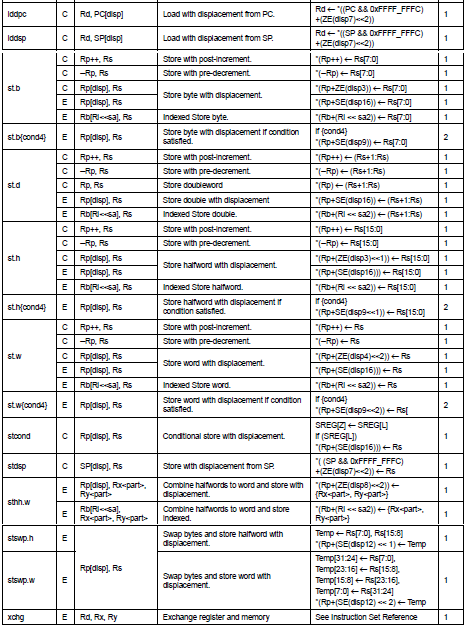
112 111
 Tabela A.")
113 112 Tabela A.11: Sistema/Controle Tabela A.12: Instruções para auxiliar a execução Java (Card) Tabela A.13: Instruções ler-modificar-escrever memória

114 Tabela A.14: Interface Coprocessador 113

115 Tabela A.15: Operações SIMD 114
Fundamentos de Hardware
 Fundamentos de Hardware Curso Técnico em Informática SUMÁRIO PLACAS DE EXPANSÃO... 3 PLACAS DE VÍDEO... 3 Conectores de Vídeo... 4 PLACAS DE SOM... 6 Canais de Áudio... 7 Resolução das Placas de Som...
Fundamentos de Hardware Curso Técnico em Informática SUMÁRIO PLACAS DE EXPANSÃO... 3 PLACAS DE VÍDEO... 3 Conectores de Vídeo... 4 PLACAS DE SOM... 6 Canais de Áudio... 7 Resolução das Placas de Som...
Tecnologia PCI express. Introdução. Tecnologia PCI Express
 Tecnologia PCI express Introdução O desenvolvimento de computadores cada vez mais rápidos e eficientes é uma necessidade constante. No que se refere ao segmento de computadores pessoais, essa necessidade
Tecnologia PCI express Introdução O desenvolvimento de computadores cada vez mais rápidos e eficientes é uma necessidade constante. No que se refere ao segmento de computadores pessoais, essa necessidade
Projetos I Resumo de TCC. Luiz Rogério Batista De Pieri Mat: 0413829 5
 Projetos I Resumo de TCC Luiz Rogério Batista De Pieri Mat: 0413829 5 MAD RSSF: Uma Infra estrutura de Monitoração Integrando Redes de Sensores Ad Hoc e uma Configuração de Cluster Computacional (Denise
Projetos I Resumo de TCC Luiz Rogério Batista De Pieri Mat: 0413829 5 MAD RSSF: Uma Infra estrutura de Monitoração Integrando Redes de Sensores Ad Hoc e uma Configuração de Cluster Computacional (Denise
IW10. Rev.: 02. Especificações Técnicas
 IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
IW10 Rev.: 02 Especificações Técnicas Sumário 1. INTRODUÇÃO... 1 2. COMPOSIÇÃO DO IW10... 2 2.1 Placa Principal... 2 2.2 Módulos de Sensores... 5 3. APLICAÇÕES... 6 3.1 Monitoramento Local... 7 3.2 Monitoramento
Introdução a computação móvel. Middlewares para Rede de Sensores sem Fio. Uma avaliação na ótica de Adaptação ao Contexto
 Introdução a computação móvel Monografia: Middlewares para Rede de Sensores sem Fio Uma avaliação na ótica de Adaptação ao Contexto Adriano Branco Agenda Objetivo do trabalho O que é uma WSN Middlewares
Introdução a computação móvel Monografia: Middlewares para Rede de Sensores sem Fio Uma avaliação na ótica de Adaptação ao Contexto Adriano Branco Agenda Objetivo do trabalho O que é uma WSN Middlewares
Multiplexador. Permitem que vários equipamentos compartilhem um único canal de comunicação
 Multiplexadores Permitem que vários equipamentos compartilhem um único canal de comunicação Transmissor 1 Receptor 1 Transmissor 2 Multiplexador Multiplexador Receptor 2 Transmissor 3 Receptor 3 Economia
Multiplexadores Permitem que vários equipamentos compartilhem um único canal de comunicação Transmissor 1 Receptor 1 Transmissor 2 Multiplexador Multiplexador Receptor 2 Transmissor 3 Receptor 3 Economia
Arquitetura dos Sistemas de Informação Distribuídos
 Arquitetura dos Sistemas de Informação Distribuídos Quando se projeta um sistema cuja utilização é destinada a ser feita em ambientes do mundo real, projeções devem ser feitas para que o sistema possa
Arquitetura dos Sistemas de Informação Distribuídos Quando se projeta um sistema cuja utilização é destinada a ser feita em ambientes do mundo real, projeções devem ser feitas para que o sistema possa
Evolução na Comunicação de
 Evolução na Comunicação de Dados Invenção do telégrafo em 1838 Código Morse. 1º Telégrafo Código Morse Evolução na Comunicação de Dados A evolução da comunicação através de sinais elétricos deu origem
Evolução na Comunicação de Dados Invenção do telégrafo em 1838 Código Morse. 1º Telégrafo Código Morse Evolução na Comunicação de Dados A evolução da comunicação através de sinais elétricos deu origem
PROCESSO DE DESENVOLVIMENTO DE SOFTWARE. Modelos de Processo de Desenvolvimento de Software
 PROCESSO DE DESENVOLVIMENTO DE SOFTWARE Introdução Modelos de Processo de Desenvolvimento de Software Os modelos de processos de desenvolvimento de software surgiram pela necessidade de dar resposta às
PROCESSO DE DESENVOLVIMENTO DE SOFTWARE Introdução Modelos de Processo de Desenvolvimento de Software Os modelos de processos de desenvolvimento de software surgiram pela necessidade de dar resposta às
Governança de TI. ITIL v.2&3. parte 1
 Governança de TI ITIL v.2&3 parte 1 Prof. Luís Fernando Garcia LUIS@GARCIA.PRO.BR ITIL 1 1 ITIL Gerenciamento de Serviços 2 2 Gerenciamento de Serviços Gerenciamento de Serviços 3 3 Gerenciamento de Serviços
Governança de TI ITIL v.2&3 parte 1 Prof. Luís Fernando Garcia LUIS@GARCIA.PRO.BR ITIL 1 1 ITIL Gerenciamento de Serviços 2 2 Gerenciamento de Serviços Gerenciamento de Serviços 3 3 Gerenciamento de Serviços
Arquitetura de Rede de Computadores
 TCP/IP Roteamento Arquitetura de Rede de Prof. Pedro Neto Aracaju Sergipe - 2011 Ementa da Disciplina 4. Roteamento i. Máscara de Rede ii. Sub-Redes iii. Números Binários e Máscara de Sub-Rede iv. O Roteador
TCP/IP Roteamento Arquitetura de Rede de Prof. Pedro Neto Aracaju Sergipe - 2011 Ementa da Disciplina 4. Roteamento i. Máscara de Rede ii. Sub-Redes iii. Números Binários e Máscara de Sub-Rede iv. O Roteador
Projeto de controle e Automação de Antena
 Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Projeto de controle e Automação de Antena Wallyson Ferreira Resumo expandido de Iniciação Tecnológica PUC-Campinas RA: 13015375 Lattes: K4894092P0 wallysonbueno@gmail.com Omar C. Branquinho Sistemas de
Introdução à Computação
 Aspectos Importantes - Desenvolvimento de Software Motivação A economia de todos países dependem do uso de software. Cada vez mais, o controle dos processos tem sido feito por software. Atualmente, os
Aspectos Importantes - Desenvolvimento de Software Motivação A economia de todos países dependem do uso de software. Cada vez mais, o controle dos processos tem sido feito por software. Atualmente, os
Roteiro para a escrita do documento de Especificação de Requisitos de Software (ERS)
") Roteiro para a escrita do documento de Especificação de Requisitos de Software (ERS) Definição Geral: Disciplina de Compiladores Prof. Jorge Bidarra (UNIOESTE) A especificação de requisitos tem como objetivo
Roteiro para a escrita do documento de Especificação de Requisitos de Software (ERS) Definição Geral: Disciplina de Compiladores Prof. Jorge Bidarra (UNIOESTE) A especificação de requisitos tem como objetivo
Automação de Locais Distantes
 Automação de Locais Distantes Adaptação do texto Improving Automation at Remote Sites da GE Fanuc/ Water por Peter Sowmy e Márcia Campos, Gerentes de Contas da. Nova tecnologia reduz custos no tratamento
Automação de Locais Distantes Adaptação do texto Improving Automation at Remote Sites da GE Fanuc/ Water por Peter Sowmy e Márcia Campos, Gerentes de Contas da. Nova tecnologia reduz custos no tratamento
Como conduzir com sucesso um projeto de melhoria da qualidade
 Como conduzir com sucesso um projeto de melhoria da qualidade Maria Luiza Guerra de Toledo Coordenar e conduzir um projeto de melhoria da qualidade, seja ele baseado no Seis Sigma, Lean, ou outra metodologia
Como conduzir com sucesso um projeto de melhoria da qualidade Maria Luiza Guerra de Toledo Coordenar e conduzir um projeto de melhoria da qualidade, seja ele baseado no Seis Sigma, Lean, ou outra metodologia
Técnicas de Manutenção de Computadores
 Técnicas de Manutenção de Computadores Professor: Luiz Claudio Ferreira de Souza Processadores É indispensável em qualquer computador, tem a função de gerenciamento, controlando todas as informações de
Técnicas de Manutenção de Computadores Professor: Luiz Claudio Ferreira de Souza Processadores É indispensável em qualquer computador, tem a função de gerenciamento, controlando todas as informações de
UNIVERSIDADE FEDERAL DE SANTA CATARINA GRADUAÇÃO EM SISTEMAS DE INFORMAÇÃO DEPARTAMENTO DE INFORMÁTICA E ESTATÍSTICA DATA MINING EM VÍDEOS
 UNIVERSIDADE FEDERAL DE SANTA CATARINA GRADUAÇÃO EM SISTEMAS DE INFORMAÇÃO DEPARTAMENTO DE INFORMÁTICA E ESTATÍSTICA DATA MINING EM VÍDEOS VINICIUS DA SILVEIRA SEGALIN FLORIANÓPOLIS OUTUBRO/2013 Sumário
UNIVERSIDADE FEDERAL DE SANTA CATARINA GRADUAÇÃO EM SISTEMAS DE INFORMAÇÃO DEPARTAMENTO DE INFORMÁTICA E ESTATÍSTICA DATA MINING EM VÍDEOS VINICIUS DA SILVEIRA SEGALIN FLORIANÓPOLIS OUTUBRO/2013 Sumário
SERVIÇO DE ANÁLISE DE REDES DE TELECOMUNICAÇÕES APLICABILIDADE PARA CALL-CENTERS VISÃO DA EMPRESA
 SERVIÇO DE ANÁLISE DE REDES DE TELECOMUNICAÇÕES APLICABILIDADE PARA CALL-CENTERS VISÃO DA EMPRESA Muitas organizações terceirizam o transporte das chamadas em seus call-centers, dependendo inteiramente
SERVIÇO DE ANÁLISE DE REDES DE TELECOMUNICAÇÕES APLICABILIDADE PARA CALL-CENTERS VISÃO DA EMPRESA Muitas organizações terceirizam o transporte das chamadas em seus call-centers, dependendo inteiramente
Atualmente dedica-se à Teleco e à prestação de serviços de consultoria em telecomunicações.
 Roteiro de Estudos Redes PAN II O Portal Teleco apresenta periodicamente Roteiros de Estudo sobre os principais temas das Telecomunicações. Os roteiros apresentam uma sugestão de tutoriais publicados para
Roteiro de Estudos Redes PAN II O Portal Teleco apresenta periodicamente Roteiros de Estudo sobre os principais temas das Telecomunicações. Os roteiros apresentam uma sugestão de tutoriais publicados para
APLICATIVO MOBILE CATÁLOGO DE PÁSSAROS - PLATAFORMA ANDROID/MYSQL/WEBSERVICE
 APLICATIVO MOBILE CATÁLOGO DE PÁSSAROS - PLATAFORMA ANDROID/MYSQL/WEBSERVICE MARCOS LEÃO 1, DAVID PRATA 2 1 Aluno do Curso de Ciência da Computação; Campus de Palmas; e-mail: leão@uft.edu.br PIBIC/UFT
APLICATIVO MOBILE CATÁLOGO DE PÁSSAROS - PLATAFORMA ANDROID/MYSQL/WEBSERVICE MARCOS LEÃO 1, DAVID PRATA 2 1 Aluno do Curso de Ciência da Computação; Campus de Palmas; e-mail: leão@uft.edu.br PIBIC/UFT
SISTEMA DE MONITORAMENTO DE CONDIÇÕES CLIMÁTICAS
 SISTEMA DE MONITORAMENTO DE CONDIÇÕES CLIMÁTICAS SUMÁRIO 1 Introdução...5 2 Sistema de monitoramento climático Ressonare...7 2.1 A rede de monitoramento...8 2.2 A coleta, o armazenamento e o acesso aos
SISTEMA DE MONITORAMENTO DE CONDIÇÕES CLIMÁTICAS SUMÁRIO 1 Introdução...5 2 Sistema de monitoramento climático Ressonare...7 2.1 A rede de monitoramento...8 2.2 A coleta, o armazenamento e o acesso aos
Extração de Requisitos
 Extração de Requisitos Extração de requisitos é o processo de transformação das idéias que estão na mente dos usuários (a entrada) em um documento formal (saída). Pode se entender também como o processo
Extração de Requisitos Extração de requisitos é o processo de transformação das idéias que estão na mente dos usuários (a entrada) em um documento formal (saída). Pode se entender também como o processo
Pós-Graduação em Gerenciamento de Projetos práticas do PMI
 Pós-Graduação em Gerenciamento de Projetos práticas do PMI Planejamento do Gerenciamento das Comunicações (10) e das Partes Interessadas (13) PLANEJAMENTO 2 PLANEJAMENTO Sem 1 Sem 2 Sem 3 Sem 4 Sem 5 ABRIL
Pós-Graduação em Gerenciamento de Projetos práticas do PMI Planejamento do Gerenciamento das Comunicações (10) e das Partes Interessadas (13) PLANEJAMENTO 2 PLANEJAMENTO Sem 1 Sem 2 Sem 3 Sem 4 Sem 5 ABRIL
INSTITUTO DE EMPREGO E FORMAÇÃO PROFISSIONAL, I.P.
 INSTITUTO DE EMPREGO E FORMAÇÃO PROFISSIONAL, I.P. Centro de Emprego e Formação Profissional da Guarda Curso: Técnico de Informática Sistemas (EFA-S4A)-NS Trabalho Realizado Por: Igor_Saraiva nº 7 Com
INSTITUTO DE EMPREGO E FORMAÇÃO PROFISSIONAL, I.P. Centro de Emprego e Formação Profissional da Guarda Curso: Técnico de Informática Sistemas (EFA-S4A)-NS Trabalho Realizado Por: Igor_Saraiva nº 7 Com
Planejando o aplicativo
 Um aplicativo do Visual FoxPro geralmente inclui um ou mais bancos de dados, um programa principal que configura o ambiente de sistema do aplicativo, além de uma interface com os usuários composta por
Um aplicativo do Visual FoxPro geralmente inclui um ou mais bancos de dados, um programa principal que configura o ambiente de sistema do aplicativo, além de uma interface com os usuários composta por
1 INTRODUÇÃO. 1.1 Motivação e Justificativa
 1 INTRODUÇÃO 1.1 Motivação e Justificativa A locomoção é um dos direitos básicos do cidadão. Cabe, portanto, ao poder público normalmente uma prefeitura e/ou um estado prover transporte de qualidade para
1 INTRODUÇÃO 1.1 Motivação e Justificativa A locomoção é um dos direitos básicos do cidadão. Cabe, portanto, ao poder público normalmente uma prefeitura e/ou um estado prover transporte de qualidade para
REDES DE COMPUTADORES
 REDES DE COMPUTADORES Rede é um conjunto de módulos processadores capazes de trocar informações e compartilhar recursos. O tipo de rede é definido pela sua área de abrangência, podemos classificar as redes
REDES DE COMPUTADORES Rede é um conjunto de módulos processadores capazes de trocar informações e compartilhar recursos. O tipo de rede é definido pela sua área de abrangência, podemos classificar as redes
Fundamentos de Sistemas de Informação Sistemas de Informação
 Objetivo da Aula Tecnologia e as Organizações, importância dos sistemas de informação e níveis de atuação dos sistemas de informação Organizações & Tecnologia TECNOLOGIA A razão e a capacidade do homem
Objetivo da Aula Tecnologia e as Organizações, importância dos sistemas de informação e níveis de atuação dos sistemas de informação Organizações & Tecnologia TECNOLOGIA A razão e a capacidade do homem
Administração de Sistemas de Informação Gerenciais
 Administração de Sistemas de Informação Gerenciais UNIDADE III: Infraestrutura de Tecnologia da Informação Atualmente, a infraestrutura de TI é composta por cinco elementos principais: hardware, software,
Administração de Sistemas de Informação Gerenciais UNIDADE III: Infraestrutura de Tecnologia da Informação Atualmente, a infraestrutura de TI é composta por cinco elementos principais: hardware, software,
Aula 01 Introdução ao Gerenciamento de Redes
 Aula 01 Introdução ao Gerenciamento de Redes Leonardo Lemes Fagundes leonardo@exatas.unisinos.br São Leopoldo, 15 de outubro de 2004 Roteiro Apresentação da disciplina Objetivos Conteúdo programático Metodologia
Aula 01 Introdução ao Gerenciamento de Redes Leonardo Lemes Fagundes leonardo@exatas.unisinos.br São Leopoldo, 15 de outubro de 2004 Roteiro Apresentação da disciplina Objetivos Conteúdo programático Metodologia
Profissionais de Alta Performance
 Profissionais de Alta Performance As transformações pelas quais o mundo passa exigem novos posicionamentos em todas as áreas e em especial na educação. A transferência pura simples de dados ou informações
Profissionais de Alta Performance As transformações pelas quais o mundo passa exigem novos posicionamentos em todas as áreas e em especial na educação. A transferência pura simples de dados ou informações
MÓDULO 7 Modelo OSI. 7.1 Serviços Versus Protocolos
 MÓDULO 7 Modelo OSI A maioria das redes são organizadas como pilhas ou níveis de camadas, umas sobre as outras, sendo feito com o intuito de reduzir a complexidade do projeto da rede. O objetivo de cada
MÓDULO 7 Modelo OSI A maioria das redes são organizadas como pilhas ou níveis de camadas, umas sobre as outras, sendo feito com o intuito de reduzir a complexidade do projeto da rede. O objetivo de cada
Interatividade aliada a Análise de Negócios
 Interatividade aliada a Análise de Negócios Na era digital, a quase totalidade das organizações necessita da análise de seus negócios de forma ágil e segura - relatórios interativos, análise de gráficos,
Interatividade aliada a Análise de Negócios Na era digital, a quase totalidade das organizações necessita da análise de seus negócios de forma ágil e segura - relatórios interativos, análise de gráficos,
Java. para Dispositivos Móveis. Thienne M. Johnson. Novatec. Desenvolvendo Aplicações com J2ME
 Java para Dispositivos Móveis Desenvolvendo Aplicações com J2ME Thienne M. Johnson Novatec Capítulo 1 Introdução à computação móvel 1.1 Computação móvel definições Computação móvel está na moda. Operadoras
Java para Dispositivos Móveis Desenvolvendo Aplicações com J2ME Thienne M. Johnson Novatec Capítulo 1 Introdução à computação móvel 1.1 Computação móvel definições Computação móvel está na moda. Operadoras
Um Driver NDIS Para Interceptação de Datagramas IP
 Um Driver NDIS Para Interceptação de Datagramas IP Paulo Fernando da Silva psilva@senior.com.br Sérgio Stringari stringari@furb.br Resumo. Este artigo apresenta o desenvolvimento de um driver NDIS 1 para
Um Driver NDIS Para Interceptação de Datagramas IP Paulo Fernando da Silva psilva@senior.com.br Sérgio Stringari stringari@furb.br Resumo. Este artigo apresenta o desenvolvimento de um driver NDIS 1 para
XDOC. Solução otimizada para armazenamento e recuperação de documentos
 XDOC Solução otimizada para armazenamento e recuperação de documentos ObJetivo Principal O Que você ACHA De ter Disponível Online todos OS Documentos emitidos por SUA empresa em UMA intranet OU Mesmo NA
XDOC Solução otimizada para armazenamento e recuperação de documentos ObJetivo Principal O Que você ACHA De ter Disponível Online todos OS Documentos emitidos por SUA empresa em UMA intranet OU Mesmo NA
Ao longo do presente capítulo será apresentada uma descrição introdutória da tecnologia FPGA e dos módulos básicos que a constitui.
 3 Tecnologia FPGA Ao longo do presente capítulo será apresentada uma descrição introdutória da tecnologia FPGA e dos módulos básicos que a constitui. 3.1. FPGA: Histórico, linguagens e blocos Muitos dos
3 Tecnologia FPGA Ao longo do presente capítulo será apresentada uma descrição introdutória da tecnologia FPGA e dos módulos básicos que a constitui. 3.1. FPGA: Histórico, linguagens e blocos Muitos dos
Computação Móvel: Redes de Sensores Sem Fio Visão Geral
 Computação Móvel: Redes de Sensores Sem Fio Visão Geral Mauro Nacif Rocha DPI/UFV 1 MANETs Mobile Ad-hoc Networks Ad-hoc Wi-Fi (802.11x) Wireless Mesh Networks (nodos não móveis) VANET (Vehicular Ad Hoc
Computação Móvel: Redes de Sensores Sem Fio Visão Geral Mauro Nacif Rocha DPI/UFV 1 MANETs Mobile Ad-hoc Networks Ad-hoc Wi-Fi (802.11x) Wireless Mesh Networks (nodos não móveis) VANET (Vehicular Ad Hoc
Esclarecimento: Não, a operação de matching ocorre no lado cliente da solução, de forma distribuída.
 1 Dúvida: - Em relação ao item 1.2 da Seção 2 - Requisitos funcionais, entendemos que a solução proposta poderá funcionar em uma arquitetura Web e que na parte cliente estará apenas o componente de captura
1 Dúvida: - Em relação ao item 1.2 da Seção 2 - Requisitos funcionais, entendemos que a solução proposta poderá funcionar em uma arquitetura Web e que na parte cliente estará apenas o componente de captura
APLICAÇÃO DO SOFTWARE E3 PARA O CONTROLE DO PROCESSO DE PRODUÇÃO ENZIMÁTICA NA NOVOZYMES
 APLICAÇÃO DO SOFTWARE E3 PARA O CONTROLE DO PROCESSO DE PRODUÇÃO ENZIMÁTICA NA NOVOZYMES Este case apresenta a aplicação da solução Elipse E3 para automatizar e coletar mais informações sobre as etapas
APLICAÇÃO DO SOFTWARE E3 PARA O CONTROLE DO PROCESSO DE PRODUÇÃO ENZIMÁTICA NA NOVOZYMES Este case apresenta a aplicação da solução Elipse E3 para automatizar e coletar mais informações sobre as etapas
3 Trabalhos Relacionados
 35 3 Trabalhos Relacionados Alguns trabalhos se relacionam com o aqui proposto sob duas visões, uma sobre a visão de implementação e arquitetura, com a utilização de informações de contexto em SMA, outra
35 3 Trabalhos Relacionados Alguns trabalhos se relacionam com o aqui proposto sob duas visões, uma sobre a visão de implementação e arquitetura, com a utilização de informações de contexto em SMA, outra
Intranets. FERNANDO ALBUQUERQUE Departamento de Ciência da Computação Universidade de Brasília 1.INTRODUÇÃO
 Intranets FERNANDO ALBUQUERQUE Departamento de Ciência da Computação Universidade de Brasília 1.INTRODUÇÃO As intranets são redes internas às organizações que usam as tecnologias utilizadas na rede mundial
Intranets FERNANDO ALBUQUERQUE Departamento de Ciência da Computação Universidade de Brasília 1.INTRODUÇÃO As intranets são redes internas às organizações que usam as tecnologias utilizadas na rede mundial
MANUAL DE IMPLANTAÇÃO SISTEMA DE INVENTÁRIO CACIC GOVERNO FEDERAL SOFTWARE PÚBLICO
 MANUAL DE IMPLANTAÇÃO SISTEMA DE INVENTÁRIO CACIC Configurador Automático e Coletor de Informações Computacionais GOVERNO FEDERAL SOFTWARE PÚBLICO software livre desenvolvido pela Dataprev Sistema de Administração
MANUAL DE IMPLANTAÇÃO SISTEMA DE INVENTÁRIO CACIC Configurador Automático e Coletor de Informações Computacionais GOVERNO FEDERAL SOFTWARE PÚBLICO software livre desenvolvido pela Dataprev Sistema de Administração
Introdução a Informática. Prof.: Roberto Franciscatto
 Introdução a Informática Prof.: Roberto Franciscatto 3.1 EXECUÇÃO DAS INSTRUÇÕES A UCP tem duas seções: Unidade de Controle Unidade Lógica e Aritmética Um programa se caracteriza por: uma série de instruções
Introdução a Informática Prof.: Roberto Franciscatto 3.1 EXECUÇÃO DAS INSTRUÇÕES A UCP tem duas seções: Unidade de Controle Unidade Lógica e Aritmética Um programa se caracteriza por: uma série de instruções
Engenharia de Sistemas Computacionais
 Engenharia de Sistemas Detalhes no planejamento UNIVERSIDADE FEDERAL DE ALAGOAS Curso de Ciência da Computação Engenharia de Software I Prof. Rômulo Nunes de Oliveira Introdução Na aplicação de um sistema
Engenharia de Sistemas Detalhes no planejamento UNIVERSIDADE FEDERAL DE ALAGOAS Curso de Ciência da Computação Engenharia de Software I Prof. Rômulo Nunes de Oliveira Introdução Na aplicação de um sistema
3 Um Framework Orientado a Aspectos para Monitoramento e Análise de Processos de Negócio
 32 3 Um Framework Orientado a Aspectos para Monitoramento e Análise de Processos de Negócio Este capítulo apresenta o framework orientado a aspectos para monitoramento e análise de processos de negócio
32 3 Um Framework Orientado a Aspectos para Monitoramento e Análise de Processos de Negócio Este capítulo apresenta o framework orientado a aspectos para monitoramento e análise de processos de negócio
Introdução. Em se tratando de computador, entendemos que memória são dispositivos que armazenam dados com os quais o processador trabalha.
 Memorias Introdução Em se tratando de computador, entendemos que memória são dispositivos que armazenam dados com os quais o processador trabalha. Necessariamente existe dois tipos de memórias: -Memória
Memorias Introdução Em se tratando de computador, entendemos que memória são dispositivos que armazenam dados com os quais o processador trabalha. Necessariamente existe dois tipos de memórias: -Memória
Histórico da Revisão. Versão Descrição Autor. 1.0 Versão Inicial
 1 of 14 27/01/2014 17:33 Sistema de Paginação de Esportes Universitários Documento de Arquitetura de Software Versão 1.0 Histórico da Revisão Data 30 de novembro de 1999 Versão Descrição Autor 1.0 Versão
1 of 14 27/01/2014 17:33 Sistema de Paginação de Esportes Universitários Documento de Arquitetura de Software Versão 1.0 Histórico da Revisão Data 30 de novembro de 1999 Versão Descrição Autor 1.0 Versão
Centro Tecnológico de Eletroeletrônica César Rodrigues. Atividade Avaliativa
 1ª Exercícios - REDES LAN/WAN INSTRUTOR: MODALIDADE: TÉCNICO APRENDIZAGEM DATA: Turma: VALOR (em pontos): NOTA: ALUNO (A): 1. Utilize 1 para assinalar os protocolos que são da CAMADA DE REDE e 2 para os
1ª Exercícios - REDES LAN/WAN INSTRUTOR: MODALIDADE: TÉCNICO APRENDIZAGEM DATA: Turma: VALOR (em pontos): NOTA: ALUNO (A): 1. Utilize 1 para assinalar os protocolos que são da CAMADA DE REDE e 2 para os
SMART GRID EM ESPAÇOS POPULARES: DESAFIOS E POSSIBILIDADES. Bolsista do PET EEEC/UFG engenheiralaura1@hotmail.com.
 SMART GRID EM ESPAÇOS POPULARES: DESAFIOS E POSSIBILIDADES Rosemar Aquino de Rezende JUNIOR 1 ; Laura Vitória Rezende Dias 2 ; Getúlio Antero de Deus JÚNIOR 3 Grupo PET EEEC (Conexões de Saberes) /UFG
SMART GRID EM ESPAÇOS POPULARES: DESAFIOS E POSSIBILIDADES Rosemar Aquino de Rezende JUNIOR 1 ; Laura Vitória Rezende Dias 2 ; Getúlio Antero de Deus JÚNIOR 3 Grupo PET EEEC (Conexões de Saberes) /UFG
Introdução aos Computadores
 Os Computadores revolucionaram as formas de processamento de Informação pela sua capacidade de tratar grandes quantidades de dados em curto espaço de tempo. Nos anos 60-80 os computadores eram máquinas
Os Computadores revolucionaram as formas de processamento de Informação pela sua capacidade de tratar grandes quantidades de dados em curto espaço de tempo. Nos anos 60-80 os computadores eram máquinas
Segundo Pré-teste. Data de realização. 18 de Novembro de 2007. Local.
 Segundo Pré-teste Data de realização. 18 de Novembro de 2007. Local. Duas salas de aula da Pós-graduação do Departamento de Arquitetura e Urbanismo da EESC/USP. Duração: 4 horas. Dos objetivos. Envolveu
Segundo Pré-teste Data de realização. 18 de Novembro de 2007. Local. Duas salas de aula da Pós-graduação do Departamento de Arquitetura e Urbanismo da EESC/USP. Duração: 4 horas. Dos objetivos. Envolveu
7.Conclusão e Trabalhos Futuros
 7.Conclusão e Trabalhos Futuros 158 7.Conclusão e Trabalhos Futuros 7.1 Conclusões Finais Neste trabalho, foram apresentados novos métodos para aceleração, otimização e gerenciamento do processo de renderização
7.Conclusão e Trabalhos Futuros 158 7.Conclusão e Trabalhos Futuros 7.1 Conclusões Finais Neste trabalho, foram apresentados novos métodos para aceleração, otimização e gerenciamento do processo de renderização
Na medida em que se cria um produto, o sistema de software, que será usado e mantido, nos aproximamos da engenharia.
 1 Introdução aos Sistemas de Informação 2002 Aula 4 - Desenvolvimento de software e seus paradigmas Paradigmas de Desenvolvimento de Software Pode-se considerar 3 tipos de paradigmas que norteiam a atividade
1 Introdução aos Sistemas de Informação 2002 Aula 4 - Desenvolvimento de software e seus paradigmas Paradigmas de Desenvolvimento de Software Pode-se considerar 3 tipos de paradigmas que norteiam a atividade
ICORLI. INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET
 INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET 2010/2011 1 Protocolo TCP/IP É um padrão de comunicação entre diferentes computadores e diferentes sistemas operativos. Cada computador deve
INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET 2010/2011 1 Protocolo TCP/IP É um padrão de comunicação entre diferentes computadores e diferentes sistemas operativos. Cada computador deve
Entendendo como funciona o NAT
 Entendendo como funciona o NAT Vamos inicialmente entender exatamente qual a função do NAT e em que situações ele é indicado. O NAT surgiu como uma alternativa real para o problema de falta de endereços
Entendendo como funciona o NAT Vamos inicialmente entender exatamente qual a função do NAT e em que situações ele é indicado. O NAT surgiu como uma alternativa real para o problema de falta de endereços
Características técnicas Baseado no ATMega da empresa AVR, fabricante de micro-controladores em plena ascensão e concorrente do PIC Pode usar ATMega
 ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
ARDUINO O que é Arduino Arduino foi criado na Itália por Máximo Banzi com o objetivo de fomentar a computação física, cujo conceito é aumentar as formas de interação física entre nós e os computadores.
ADM041 / EPR806 Sistemas de Informação
 ADM041 / EPR806 Sistemas de Informação UNIFEI Universidade Federal de Itajubá Prof. Dr. Alexandre Ferreira de Pinho 1 Sistemas de Apoio à Decisão (SAD) Tipos de SAD Orientados por modelos: Criação de diferentes
ADM041 / EPR806 Sistemas de Informação UNIFEI Universidade Federal de Itajubá Prof. Dr. Alexandre Ferreira de Pinho 1 Sistemas de Apoio à Decisão (SAD) Tipos de SAD Orientados por modelos: Criação de diferentes
ArpPrintServer. Sistema de Gerenciamento de Impressão By Netsource www.netsource.com.br Rev: 02
 ArpPrintServer Sistema de Gerenciamento de Impressão By Netsource www.netsource.com.br Rev: 02 1 Sumário INTRODUÇÃO... 3 CARACTERÍSTICAS PRINCIPAIS DO SISTEMA... 3 REQUISITOS DE SISTEMA... 4 INSTALAÇÃO
ArpPrintServer Sistema de Gerenciamento de Impressão By Netsource www.netsource.com.br Rev: 02 1 Sumário INTRODUÇÃO... 3 CARACTERÍSTICAS PRINCIPAIS DO SISTEMA... 3 REQUISITOS DE SISTEMA... 4 INSTALAÇÃO
Sistema de Informação Integrado
 Sistema de Informação Integrado Relatório de Atividades Centro de Referência em Informação Ambiental, CRIA Novembro, 2005 Trabalho Realizado As atividades básicas previstas para o primeiro trimestre do
Sistema de Informação Integrado Relatório de Atividades Centro de Referência em Informação Ambiental, CRIA Novembro, 2005 Trabalho Realizado As atividades básicas previstas para o primeiro trimestre do
ESTUDO COMPARATIVO ENTRE AS PLATAFORMAS ARDUINO E PIC
 ESTUDO COMPARATIVO ENTRE AS PLATAFORMAS ARDUINO E PIC Tiago Menezes Xavier de Souza¹, Igor dos Passos Granado¹, Wyllian Fressatti¹ ¹Universidade Paranaense (UNIPAR) Paranavaí- PR- Brasil tiago_x666@hotmail.com,
ESTUDO COMPARATIVO ENTRE AS PLATAFORMAS ARDUINO E PIC Tiago Menezes Xavier de Souza¹, Igor dos Passos Granado¹, Wyllian Fressatti¹ ¹Universidade Paranaense (UNIPAR) Paranavaí- PR- Brasil tiago_x666@hotmail.com,
FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES
 FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES Prof. Ms. Carlos José Giudice dos Santos cpgcarlos@yahoo.com.br www.oficinadapesquisa.com.br Conceito de Computador Um computador digital é
FACULDADE PITÁGORAS DISCIPLINA: ARQUITETURA DE COMPUTADORES Prof. Ms. Carlos José Giudice dos Santos cpgcarlos@yahoo.com.br www.oficinadapesquisa.com.br Conceito de Computador Um computador digital é
Disciplina: Introdução à Informática Profª Érica Barcelos
 Disciplina: Introdução à Informática Profª Érica Barcelos CAPÍTULO 4 1. ARQUITETURA DO COMPUTADOR- HARDWARE Todos os componentes físicos constituídos de circuitos eletrônicos interligados são chamados
Disciplina: Introdução à Informática Profª Érica Barcelos CAPÍTULO 4 1. ARQUITETURA DO COMPUTADOR- HARDWARE Todos os componentes físicos constituídos de circuitos eletrônicos interligados são chamados
Análise em aparelhos de telefonia celular
 Universidade Federal do Espírito Santo CCA UFES Universidade Federal do Espírito Santo Centro de Ciências Agrárias CCA UFES Departamento de Computação Análise em aparelhos de telefonia celular Computação
Universidade Federal do Espírito Santo CCA UFES Universidade Federal do Espírito Santo Centro de Ciências Agrárias CCA UFES Departamento de Computação Análise em aparelhos de telefonia celular Computação
Redes de Computadores. Prof. Dr. Rogério Galante Negri
 Redes de Computadores Prof. Dr. Rogério Galante Negri Rede É uma combinação de hardware e software Envia dados de um local para outro Hardware: transporta sinais Software: instruções que regem os serviços
Redes de Computadores Prof. Dr. Rogério Galante Negri Rede É uma combinação de hardware e software Envia dados de um local para outro Hardware: transporta sinais Software: instruções que regem os serviços
Permite a coleta de dados em tempo real dos processos de produção, possuindo, também, interfaces para a transferência dos dados para os sistemas
 Permite a coleta de dados em tempo real dos processos de produção, possuindo, também, interfaces para a transferência dos dados para os sistemas administrativos da empresa. Nessa configuração, o PC é a
Permite a coleta de dados em tempo real dos processos de produção, possuindo, também, interfaces para a transferência dos dados para os sistemas administrativos da empresa. Nessa configuração, o PC é a
AULA 1. Informática Básica. Gustavo Leitão. gustavo.leitao@ifrn.edu.br. Disciplina: Professor: Email:
 AULA 1 Disciplina: Informática Básica Professor: Gustavo Leitão Email: gustavo.leitao@ifrn.edu.br Estudo de caso Empresa do ramo de seguros Presidência RH Financeiro Vendas e Marketing TI CRM Riscos Introdução
AULA 1 Disciplina: Informática Básica Professor: Gustavo Leitão Email: gustavo.leitao@ifrn.edu.br Estudo de caso Empresa do ramo de seguros Presidência RH Financeiro Vendas e Marketing TI CRM Riscos Introdução
Capítulo 4 - Roteamento e Roteadores
 Capítulo 4 - Roteamento e Roteadores 4.1 - Roteamento Roteamento é a escolha do módulo do nó de origem ao nó de destino por onde as mensagens devem transitar. Na comutação de circuito, nas mensagens ou
Capítulo 4 - Roteamento e Roteadores 4.1 - Roteamento Roteamento é a escolha do módulo do nó de origem ao nó de destino por onde as mensagens devem transitar. Na comutação de circuito, nas mensagens ou
Introdução ao GED Simone de Abreu
 Introdução ao GED Simone de Abreu GED O que é isso? O conhecimento teve, ao longo da história, diferentes significados e funções. No tempo das cavernas nossos antepassados transmitiam aos seus descendentes
Introdução ao GED Simone de Abreu GED O que é isso? O conhecimento teve, ao longo da história, diferentes significados e funções. No tempo das cavernas nossos antepassados transmitiam aos seus descendentes
Meio Físico. Mensagem. Protocolo. Emissor e Receptor. Data Terminal Equipment Data Communications Equipment
 Emissor Receptor Meio Físico Mensagem Protocolo Emissor e Receptor Data Terminal Equipment Data Communications Equipment (DTE) + (DCE) Meio Físico Mensagem ( pacote ) O meio físico É o elemento que transmite
Emissor Receptor Meio Físico Mensagem Protocolo Emissor e Receptor Data Terminal Equipment Data Communications Equipment (DTE) + (DCE) Meio Físico Mensagem ( pacote ) O meio físico É o elemento que transmite
Air-Fi - sistema sem fio Sinta-se confortável com a confiança e o desempenho líderes do setor.
 Air-Fi - sistema sem fio Sinta-se confortável com a confiança e o desempenho líderes do setor. Corte os fios e sinta-se confortável com a solução sem fio Air-Fi da Trane. A comunicação sem fio Air-Fi da
Air-Fi - sistema sem fio Sinta-se confortável com a confiança e o desempenho líderes do setor. Corte os fios e sinta-se confortável com a solução sem fio Air-Fi da Trane. A comunicação sem fio Air-Fi da
ANEXO VI ESPECIFICAÇÃO DO SISTEMA DE MONITORAMENTO E CONTROLE OPERACIONAL
 Anexo VI -fls.1/7 ANEXO VI ESPECIFICAÇÃO DO SISTEMA DE MONITORAMENTO E CONTROLE OPERACIONAL Serão apresentados a seguir os conceitos, requisitos e especificações básicas do Sistema de Monitoramento e Controle
Anexo VI -fls.1/7 ANEXO VI ESPECIFICAÇÃO DO SISTEMA DE MONITORAMENTO E CONTROLE OPERACIONAL Serão apresentados a seguir os conceitos, requisitos e especificações básicas do Sistema de Monitoramento e Controle
10 DICAS DE TECNOLOGIA PARA AUMENTAR SUA PRODUTIVIDADE NO TRABALHO
 10 DICAS DE TECNOLOGIA PARA AUMENTAR SUA PRODUTIVIDADE NO TRABALHO UMA DAS GRANDES FUNÇÕES DA TECNOLOGIA É A DE FACILITAR A VIDA DO HOMEM, SEJA NA VIDA PESSOAL OU CORPORATIVA. ATRAVÉS DELA, ELE CONSEGUE
10 DICAS DE TECNOLOGIA PARA AUMENTAR SUA PRODUTIVIDADE NO TRABALHO UMA DAS GRANDES FUNÇÕES DA TECNOLOGIA É A DE FACILITAR A VIDA DO HOMEM, SEJA NA VIDA PESSOAL OU CORPORATIVA. ATRAVÉS DELA, ELE CONSEGUE
Desenvolvimento de Sistemas Orientados a Objetos com UML UP/RUP: Projeto
 Desenvolvimento de Sistemas Orientados a Objetos com UML UP/RUP: Projeto Engenharia de Software I Informática 2009 Profa. Dra. Itana Gimenes RUP: Artefatos de projeto Modelo de Projeto: Use-Case Realization-projeto
Desenvolvimento de Sistemas Orientados a Objetos com UML UP/RUP: Projeto Engenharia de Software I Informática 2009 Profa. Dra. Itana Gimenes RUP: Artefatos de projeto Modelo de Projeto: Use-Case Realization-projeto
COBERTURA EM UMA REDE DE SENSORES SEM FIO
 COBERTURA EM UMA REDE DE SENSORES SEM FIO Vivian Lúcia Bittencourt Drumond Universidade Presidente Antônio Carlos Rodovia MG 368 KM 12 Colônia Rodrigo Silva Barbacena Minas Gerais Brasil viviandrumond@yahoo.com.br
COBERTURA EM UMA REDE DE SENSORES SEM FIO Vivian Lúcia Bittencourt Drumond Universidade Presidente Antônio Carlos Rodovia MG 368 KM 12 Colônia Rodrigo Silva Barbacena Minas Gerais Brasil viviandrumond@yahoo.com.br
1 http://www.google.com
 1 Introdução A computação em grade se caracteriza pelo uso de recursos computacionais distribuídos em várias redes. Os diversos nós contribuem com capacidade de processamento, armazenamento de dados ou
1 Introdução A computação em grade se caracteriza pelo uso de recursos computacionais distribuídos em várias redes. Os diversos nós contribuem com capacidade de processamento, armazenamento de dados ou
BlackBerry Mobile Voice System
 BlackBerry Mobile Voice System BlackBerry Mobile Voice System Comunicações móveis unificadas O Mobile Voice System ( MVS) foi projetado para unificar os recursos do telefone fixo aos smartphones e às redes
BlackBerry Mobile Voice System BlackBerry Mobile Voice System Comunicações móveis unificadas O Mobile Voice System ( MVS) foi projetado para unificar os recursos do telefone fixo aos smartphones e às redes
Módulo 15 Resumo. Módulo I Cultura da Informação
 Módulo 15 Resumo Neste módulo vamos dar uma explanação geral sobre os pontos que foram trabalhados ao longo desta disciplina. Os pontos abordados nesta disciplina foram: Fundamentos teóricos de sistemas
Módulo 15 Resumo Neste módulo vamos dar uma explanação geral sobre os pontos que foram trabalhados ao longo desta disciplina. Os pontos abordados nesta disciplina foram: Fundamentos teóricos de sistemas
BRAlarmExpert. Software para Gerenciamento de Alarmes. BENEFÍCIOS obtidos com a utilização do BRAlarmExpert:
 BRAlarmExpert Software para Gerenciamento de Alarmes A TriSolutions conta com um produto diferenciado para gerenciamento de alarmes que é totalmente flexível e amigável. O software BRAlarmExpert é uma
BRAlarmExpert Software para Gerenciamento de Alarmes A TriSolutions conta com um produto diferenciado para gerenciamento de alarmes que é totalmente flexível e amigável. O software BRAlarmExpert é uma
Maior Tranqüilidade - Todos esses benefícios, protegendo seus bens materiais e as pessoas que por ali circulam.
 1 - APRESENTAÇÃO Este descritivo tem como objetivo, apresentar o Sistema de Identificação de Visitantes enfocando suas funcionalidades e condições técnicas necessárias de implantação. Vantagens do Sistema
1 - APRESENTAÇÃO Este descritivo tem como objetivo, apresentar o Sistema de Identificação de Visitantes enfocando suas funcionalidades e condições técnicas necessárias de implantação. Vantagens do Sistema
Engenharia de Software
 Engenharia de Software O que é a engenharia de software É um conjunto integrado de métodos e ferramentas utilizadas para especificar, projetar, implementar e manter um sistema. Método É uma prescrição
Engenharia de Software O que é a engenharia de software É um conjunto integrado de métodos e ferramentas utilizadas para especificar, projetar, implementar e manter um sistema. Método É uma prescrição
Roteamento e Comutação
 Roteamento e Comutação Design de Rede Local Design Hierárquico Este design envolve a divisão da rede em camadas discretas. Cada camada fornece funções específicas que definem sua função dentro da rede
Roteamento e Comutação Design de Rede Local Design Hierárquico Este design envolve a divisão da rede em camadas discretas. Cada camada fornece funções específicas que definem sua função dentro da rede
Prof. Esp. Lucas Cruz
 Prof. Esp. Lucas Cruz O hardware é qualquer tipo de equipamento eletrônico utilizado para processar dados e informações e tem como função principal receber dados de entrada, processar dados de um usuário
Prof. Esp. Lucas Cruz O hardware é qualquer tipo de equipamento eletrônico utilizado para processar dados e informações e tem como função principal receber dados de entrada, processar dados de um usuário
MONITORAMENTO WIRELESS EM TEMPERATURA, UMIDADE, PRESSÃO & GPS
 1 AR AUTOMAÇÃO EMPRESA & SOLUÇÕES A AR Automação é uma empresa especializada no desenvolvimento de sistemas wireless (sem fios) que atualmente, negocia comercialmente seus produtos e sistemas para diferentes
1 AR AUTOMAÇÃO EMPRESA & SOLUÇÕES A AR Automação é uma empresa especializada no desenvolvimento de sistemas wireless (sem fios) que atualmente, negocia comercialmente seus produtos e sistemas para diferentes
Conceitos Básicos de Telefonia Celular
 O curso foi elaborado especialmente para atender o profissional que atua no mercado varejista de aparelhos celulares e quer atender seus clientes com rapidez e qualidade. O treinamento é direcionado ao
O curso foi elaborado especialmente para atender o profissional que atua no mercado varejista de aparelhos celulares e quer atender seus clientes com rapidez e qualidade. O treinamento é direcionado ao
CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE
 CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE Roland Yuri Schreiber 1 ; Tiago Andrade Camacho 2 ; Tiago Boechel 3 ; Vinicio Alexandre Bogo Nagel 4 INTRODUÇÃO Nos últimos anos, a área de Sistemas
CONSTRUÇÃO DE VEÍCULO MECATRÔNICO COMANDADO REMOTAMENTE Roland Yuri Schreiber 1 ; Tiago Andrade Camacho 2 ; Tiago Boechel 3 ; Vinicio Alexandre Bogo Nagel 4 INTRODUÇÃO Nos últimos anos, a área de Sistemas
Projeto de inovação do processo de monitoramento de safra da Conab
 Projeto de inovação do processo de monitoramento de safra da Conab Projeto elaborado por Lorenzo Seguini lorenzo_seguini@yahoo.it Projeto Diálogos Setoriais União Europeia - Brasil 1 Sumário 1. Introdução...3
Projeto de inovação do processo de monitoramento de safra da Conab Projeto elaborado por Lorenzo Seguini lorenzo_seguini@yahoo.it Projeto Diálogos Setoriais União Europeia - Brasil 1 Sumário 1. Introdução...3
SISTEMAS DISTRIBUIDOS
 1 2 Caracterização de Sistemas Distribuídos: Os sistemas distribuídos estão em toda parte. A Internet permite que usuários de todo o mundo acessem seus serviços onde quer que possam estar. Cada organização
1 2 Caracterização de Sistemas Distribuídos: Os sistemas distribuídos estão em toda parte. A Internet permite que usuários de todo o mundo acessem seus serviços onde quer que possam estar. Cada organização
Projeto de Monitoração e Melhoria Contínua com Six-Sigma, IoT e Big Data
 Projeto de Monitoração e Melhoria Contínua com Six-Sigma, IoT e Big Data Contexto As pressões do mercado por excelência em qualidade e baixo custo obrigam as empresas a adotarem sistemas de produção automatizados
Projeto de Monitoração e Melhoria Contínua com Six-Sigma, IoT e Big Data Contexto As pressões do mercado por excelência em qualidade e baixo custo obrigam as empresas a adotarem sistemas de produção automatizados
Exercícios DAC/ADC e Trabalhos
 Exercícios DAC/ADC e Trabalhos Aula 02 - DAC / ADC Heitor Medeiros Florencio 1 heitorm@dca.ufrn.br 1 Universidade Federal do Rio Grande do Norte Centro de Tecnologia Departamento de Engenharia de Computação
Exercícios DAC/ADC e Trabalhos Aula 02 - DAC / ADC Heitor Medeiros Florencio 1 heitorm@dca.ufrn.br 1 Universidade Federal do Rio Grande do Norte Centro de Tecnologia Departamento de Engenharia de Computação
Headphone com Microfone sem Fio USB
 Headphone com Microfone sem Fio USB Manual do Usuário Você acaba de adquirir um produto Goldship, testado e aprovado por diversos consumidores em todo Brasil. Neste manual estão contidas todas as informações
Headphone com Microfone sem Fio USB Manual do Usuário Você acaba de adquirir um produto Goldship, testado e aprovado por diversos consumidores em todo Brasil. Neste manual estão contidas todas as informações
CONCEITOS INICIAIS. Agenda A diferença entre páginas Web, Home Page e apresentação Web;
 CONCEITOS INICIAIS Agenda A diferença entre páginas Web, Home Page e apresentação Web; O que é necessário para se criar páginas para a Web; Navegadores; O que é site, Host, Provedor e Servidor Web; Protocolos.
CONCEITOS INICIAIS Agenda A diferença entre páginas Web, Home Page e apresentação Web; O que é necessário para se criar páginas para a Web; Navegadores; O que é site, Host, Provedor e Servidor Web; Protocolos.
Tipos de Sistemas Distribuídos (Cluster e Grid)
") Tipos de Sistemas Distribuídos (Cluster e Grid) Sistemas Distribuídos Mauro Lopes Carvalho Silva Professor EBTT DAI Departamento de Informática Campus Monte Castelo Instituto Federal de Educação Ciência
Tipos de Sistemas Distribuídos (Cluster e Grid) Sistemas Distribuídos Mauro Lopes Carvalho Silva Professor EBTT DAI Departamento de Informática Campus Monte Castelo Instituto Federal de Educação Ciência
Software de segurança em redes para monitoração de pacotes em uma conexão TCP/IP
 Software de segurança em redes para monitoração de pacotes em uma conexão TCP/IP Paulo Fernando da Silva psilva@senior.com.br Sérgio Stringari stringari@furbbr Resumo. Este artigo apresenta a especificação
Software de segurança em redes para monitoração de pacotes em uma conexão TCP/IP Paulo Fernando da Silva psilva@senior.com.br Sérgio Stringari stringari@furbbr Resumo. Este artigo apresenta a especificação
ATIVIDADES PRÁTICAS SUPERVISIONADAS
 ATIVIDADES PRÁTICAS SUPERVISIONADAS Tecnologia em Redes de Computadores 4ª Série Gerência de Redes A atividade prática supervisionada (ATPS) é um método de ensinoaprendizagem desenvolvido por meio de um
ATIVIDADES PRÁTICAS SUPERVISIONADAS Tecnologia em Redes de Computadores 4ª Série Gerência de Redes A atividade prática supervisionada (ATPS) é um método de ensinoaprendizagem desenvolvido por meio de um
Simulação de coleta de dados em redes de sensores sem o por robôs móveis utilizando a ferramenta Player/Stage
 Universidade Federal de Ouro Preto - UFOP Instituto de Ciências Exatas e Biológicas - ICEB Departamento de Computação - DECOM Simulação de coleta de dados em redes de sensores sem o por robôs móveis utilizando
Universidade Federal de Ouro Preto - UFOP Instituto de Ciências Exatas e Biológicas - ICEB Departamento de Computação - DECOM Simulação de coleta de dados em redes de sensores sem o por robôs móveis utilizando