Módulos de Comunicação Série
|
|
|
- Branca Flor Eduarda Bento Rijo
- 8 Há anos
- Visualizações:
Transcrição
1 O módulo EUSART - Enhanced Universal Synchronous Asynchronous Receiver Transmitter - Receptor/ Transmissor Síncrono/Assíncrono Série Avançado, é um periférico interno de comunicações I/O série. Também é conhecido como SCI - Serial Communications Interface - Interface de Comunicações Série. Contém todos os geradores de relógio, shift-registers e registos de dados necessários para fazer uma emissão, ou recepção, de dados série, independentemente da execução do programa principal. Como o seu nome indica, aparte do uso do relógio para sincronização, este módulo também pode estabelecer comunicações assíncronas, o que o torna insubstituivel em algumas aplicações. Como exemplo, no caso de ser dificil, ou impossivel, de disponibilizar canais especiais de Relógio e Dados, ex.: controlo remoto por rádio ou infravermelhos, o módulo EUSART é uma solução bastante conveniente. O sistema EUSART, dentro do PIC16F887, tem as seguintes características: Transmissão/Recepção Assíncrona em Full-Duplex (envia e recebe ao mesmo tempo); Tamanho de dados configuravel entre 8 ou 9 bits; Detecção de endereço no modo de 9 bits; Detecção de erro, de registo de entrada já cheio; Comunicação Hall-Duplex (ou envia, ou recebe) no modo Síncrono Mestre, ou Escravo. 123

2 Modo Assíncrono da EUSART A EUSART transmite e recebe dados, usando um formato normalizado de non-return-to-zero (NRZ), ou não-retorna-ao-zero. Como de pode ver na figura abaixo, este modo não usa sinal de relógio, enquanto os dados estão a ser transferidos: EUSART em modo Assíncrono Cada pacote de dados é transferido da seguinte maneira: Quando parado, o pino de saída está no estado lógico 1; Cada transmissão de dados começa com um bit START, que é sempre zero (0); Cada pacote de dados tem 8 ou 9 bits de tamanho, onde o LSB é sempre o primeiro a ser transferido; Cada transmissão de dados termina com um bit de STOP, que tem sempre estado lógico (1). 124

3 Transmissor Assíncrono da EUSART Transmissor Assíncrono da EUSART De maneira a possibilitar a transmissão de dados com o módulo EUSART, é necessário configurá-lo para trabalhar como transmissor. Ou seja, é necessário definir o estado dos seguintes bits: TXEN = 1 - O transmissor da EUSART está ligado, activando este bit no registo TXSTA; SYNC = 0 - A EUSART está configurada para funcionar em modo assíncrono, desactivando este bit do registo TXSTA; SPEN = 1 - Activando este bit do registo RCSTA, a EUSART é activada e o pino TX/CK é automaticamente configurado como saída. Se este bit é simultaneamente usado para alguma função analógica, esta deve ser desactivada, limpando o bit correspondente no registo ANSEL. O cerne do transmissor EUSART, é o shift-register TSR, que não é directamente acessivel pelo utilizador. De maneira a iniciar a transmissão, o módulo deve estar ligado, activando o bit TXEN. Os dados a enviar, devem ser escritos no registo TXREG, o que vai causar a seguinte sequência de eventos: 125

4 O byte é imediatamente transferido para o shift-register TSR; O registo TXREG mantém-se vazio, o que é indicado pela flag TXIF do PIR1. Se o bit TXIE do registo PIE1 estiver activo, uma interrupção é gerada. De qualquer modo, quer a interrupção esteja activa, ou não, esta flag é sempre activada. Também, não pode ser apagada pelo sotware, mas é apagada quando se escreve para o TXREG; A electrónica empurra os dados para o pino TX, ao mesmo ritmo do relógio interno: START bit... dados... STOP bit; Quando o último bit abandona o TSR, o bit TRMT do registo TXSTA é automaticamente activado; Se, entretanto, o TXREG recebeu um novo caracter, todo o procedimento é repetido imediatamente ao STOP bit do caracter anteriormente transmitido. O envio de dados de 9 bits, é habilitado activando o bit TX9 do TXSTA. O bit TX9D do TXSTA é o nono MSB. Quando da transferência, o TX9D deverá ser escrito, antes de escrever para o TXREG. Todos os noves bits de dados serão transmitidos, assim que a escrita no TXREG estiver completa. 126

5 Receptor Assíncrono da EUSART Receptor Assíncrono da EUSART Para activar a recepção de dados, é necessário fazer o seguinte: CREN = 1 - O receptor da EUSART é ligado, activando este bit no registo RCSTA; SYNC = 0 - A EUSART está configurada para funcionar em modo assíncrono, desactivando este bit do registo TXSTA; SPEN = 1 - Activando este bit do registo RCSTA, a EUSART é activada e o pino TX/CK é automaticamente configurado como saída. Se este bit é simultaneamente usado para alguma função analógica, esta deve ser desactivada, limpando o bit correspondente no registo ANSEL. Quando estes passos forem concluidos, e o START bit detectado, os dados são transferidos para o shift-register RSR pelo pino RX. Quando o STOP bit fôr recebido, a seguinte ocorre: 127

6 Os dados são automaticamente transferidos para o RCREG, se vazio; A flag RCIF é activada, e uma interrupção, se estiver habilitada pelo bit RCIE no PIE1, ocorre. De igual forma ao transmissor, a flag é limpa apenas quando se lê do RCREG. Não esquecer que é uma memória de recepção de dois bytes, o que permite receber dois caracteres simultaneamente; Se o RCREG estiver ocupado, com os dois bytes e o shift-register detectar um STOP bit, o bit the Overflow OERR vai ser activado. Neste caso, os dados que chegaram são perdidos, e o bit OERR deverá ser limpo pelo software. Tal é feito desactivando e activando o bit CREN. NOTA: não é possivel receber novos dados, enquanto o bit OERR estiver activo; Se o STOP bit for zero, o bit FERR do RCSTA é activado, indicando erro na recepção; Para receber dados com 9 bits, é necessário activar o bit RX9 no RCSTA. Detecção de Erros na Recepção Há dois tipos de erros que o microcontrolador pode detectar automaticamente. O primeiro é chamado de erro de Framing, e ocorre quando o receptor não detecta o STOP bit no tempo certo. Este erro é indicado pelo bit FERR do RCSTA. Se este bit estiver activado, significa que a última recepção de dados pode estar incorrecta. É importante lembrar: Um erro de Framing não gera uma interrupção por si próprio; Se este bit estiver activo, os últimos dados têem erros; Um erro de Framing, não impossibilita a recepção de dados; O bit FERR é limpo, lendo os dados recebidos; O bit FERR não pode ser limpo por software. Se necessário, pode ser limpo, desactivando o bit SPEN do RCSTA. Vai simultaneamente causar Reset de todo o sistema EUSART. Outro tipo de erro, é chamado de Overrun. A memória de receoção pode conter dois caracteres. Um erro overrun vai ser gerado se o terceiro caracter é recebido. Simplesmente não há espaço para outro byte, e um error é inevitavel. Quando esta situação acontece, o bit OERR do RCSTA é activado. As consequências são as seguintes: 128

7 Os dados já recebidos, e armazenados na memória de recepção, podem ser normalmente lidos; Nenhum byte adicional vai ser recebido, enquanto o bit OERR não for desactivado; Este bit não é directamente acessivel. Para o limpar, é necessário desactivar o bit CREN do RCSTA, ou fazendo um Reset ao módulo EUSART, limpando o bit SPEN do TCSTA. Recepção de dados de 9 bits Além de receber dados de 8 bits, o sistema EUSART suporta recepção de dados com 9 bits. No lado transmissor, o nono bit está agarrado ao byte original, mesmo antes do STOP bit. No lado receptor, quando o bit RX9 do RCSTA está activo, o nono bit vai ser automaticamente escrito no bit RX9D, do mesmo registo. Quando este byte é recebido, o programador deve ter em atenção em como o vai ler. O nono bit deverá ser lido antes de ler os restantes 8 bits, pois se não o fizer, o nono bit será automaticamente limpo. Recepção de dados a 9 bits 129

8 Detecção de endereços Quando o bit ADDEN do registo RCSTA está activo, o módulo EUSART está habilitado a receber dados de 9 bits, onde todos os dados de 8 bits serão ignorados. Embora pareça uma restrição, este modo permite a comunicação série entre vários microcontroladores. O principio de operação é simples. O Mestre envia 9 bits, que representa o endereço de um microcontrolador. Todos os microcontroladores Escravos que partilham a linha de transmissão, recebem estes dados. Todos os escravos deverão ter o bit ADDEN activado, para permitir a detecção de endereço. Depois da recepção, cada Escravo verifica se esse endereço é o seu. O software, depois de confirmar o endereço, deverá desactivar a detecção de endereço, limpando o bit ADDEN. O dispositivo Mestre continua o envio de dados de 8 bits. Todos os dados passando pela linha de transmissão, vão ser recebidos e reconhecidos apenas pelo Escravo já correctamente endereçado. Após receber o último byte, o Escravo deverá activar o bit AD- DEN. de maneira a poder detectar outra vez os endereços. 130

9 Registo TXSTA CSRC - Bit de selecção da origem do relógio. É apenas usado no modo síncrono. 1 - modo Mestre. Clock é gerado internamente pelo gerador de Baud Rate; 0 - modo Escravo. Clock é gerado por uma fonte externa. TX9 - Bit de activação de transmissão de 9 bits 1 - Transmissão a 9 bits 0 - Transmissão a 8 bits TXEN - Bit de activação da Transmissão 1 - Transmissão activa 0 - Transmissão desligada SYNC - Bit de selecção do modo da EUSART 1 - EUSART funciona no modo síncrono 0 - EUSART funciona no modo assíncrono SENDB - Bit de envio de caracter de break. Apenas usado em modo assíncrono, e apenas no caso de descobrir o standard do barramento LIN 1 - O envio do caracter Break activado 0 - O envio do caracter Break terminou BRGH - Bit de selecção de High Baud Rate (alta velocidade de relógio) no modo assíncrono. Não afecta a EUSART no modo síncrono. 131

10 1 - EUSART funciona em alta velocidade 0 - EUSART funciona em baixa velocidade TRMT - Bit de estado do Shift-Register de Transmissão 1 - Registo TSR está vazio 0 - Registo TSR está cheio TX9D - Nono bit de dados transmitidos. Pode ser usado para endereço ou para bit de paridade. Registo RCSTA SPEN - Bit de activação da porta Série 1 - Porta Série activa. Os pinos RX/DT e TX/CK são automaticamente configurados como entrada e saída, respectivamente 0 - Porta Série desactivada RX9 - Bit de activação da Recepção de 9 bits 1 - Recepção de 9 bits 0 - Recepção de 8 bits SREN - Bit de activação de Recepção singular. Usado apenas em modo síncrono, quando o microcontrolador funciona como Mestre 1 - Recepção singular activada 0 - Recepção singular desactivada 132

11 CREN - Bit de activação de Recepção contínua Modo Assíncrono: 1 - Recepção contínua activada 0 - Recepção contínua desactivada Modo Síncrono 1 - Recepção contínua activada, até o bit CREN ser limpo 0 - Recepção contínua desactivada ADDEN - Bit de activação de Detecção de Endereço 1 - Activa a detecção de endereço, com recepção a 9 bits 0 - Desactiva a detecção de endereço, e o nono bit pode ser usado como bit de paridade FERR - Bit de erro de Framing 1 - Na recepção, erro de Framing detectado 0 - Sem erro de Framing OERR - Bit de erro de Overrun 1 - Na recepção, erro de Overrun detectado 0 - Sem erro de Overrun RX9D - O nono bit dos dados recebidos, pode ser usado com endereço, ou bit de paridade BRG - Baud Rate Generator - Gerador de Relógio para a EUSART Se se olhar atentamente para o diagrama do receptor/transmissor assíncrono da EUSART, em ambos os casos, pode ver-se que o sinal de relógio do temporizador local BRG, é usado para a sincronização. A mesma fonte de relógio é usada no modo síncrono. Este temporizador consiste em dois registos de 8 bits, num total de 16 bits. 133

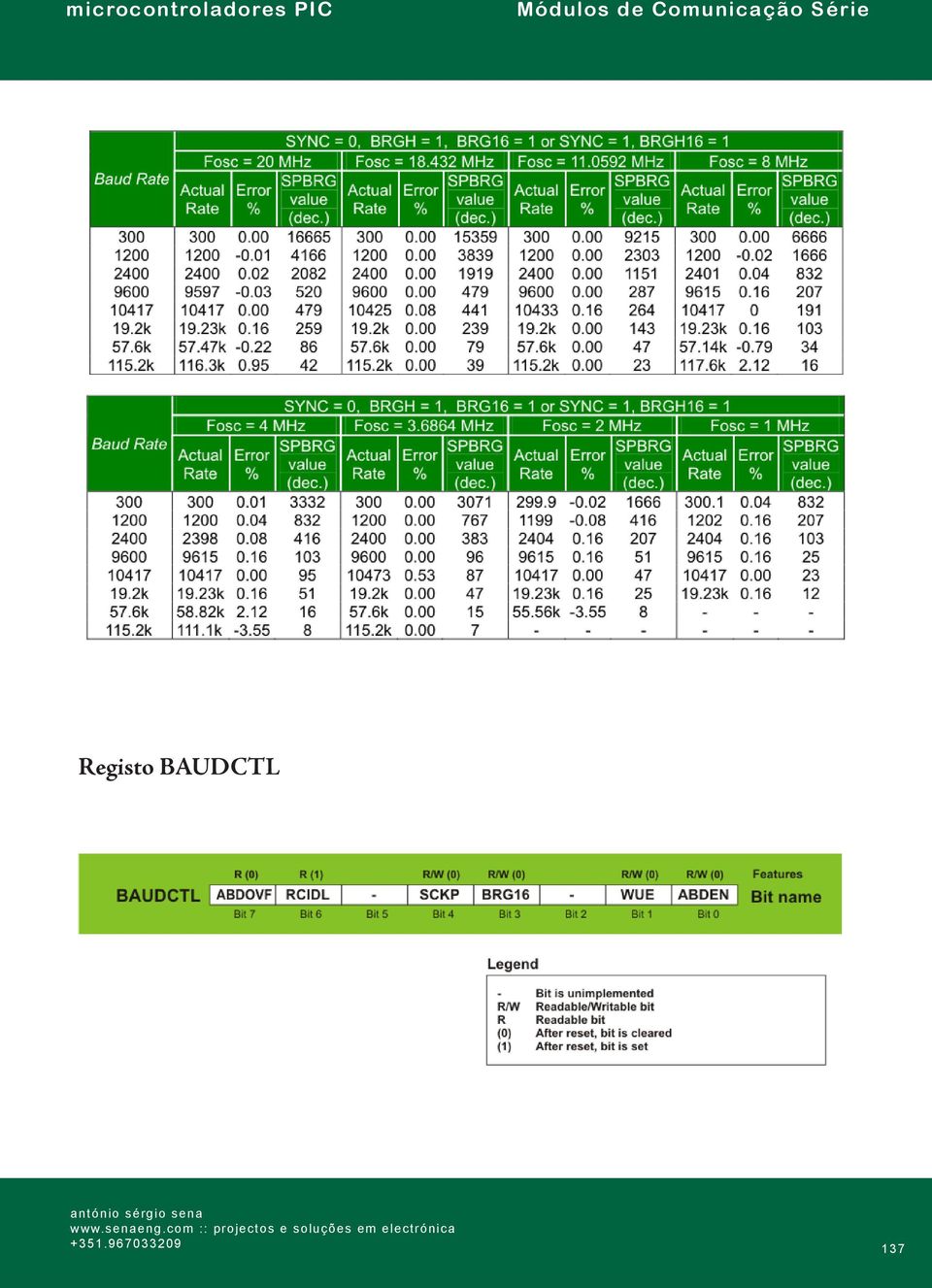
12 Gerador de Baud Rate da EUSART Um número escrito para estes dois registos, determina o Baud Rate - Velocidade da porta Série. Além do mais, ambos o bit BRGH do TXSTA e o bit BRGH16 do BAUDCTL, influenciam a frequência de relógio. A fórmula usada para calcular o Baud Rate, é dada pela tabela abaixo: Bits SYNC BRG1G BRGH BRG / EUSART Mode Baud Rate Formula bit / assíncrono Fosc / [64 (n + 1)] bit / assíncrono Fosc / [16 (n + 1)] bit / assíncrono Fosc / [16 (n + 1)] bit / assíncrono Fosc / [4 (n + 1)] 1 0 x 16-bit / assíncrono Fosc / [4 (n + 1)] 1 1 x 16-bit / assíncrono Fosc / [4 (n + 1)] As tabelas seguintes, contêem valores que devem ser escritos no registo SPBRG, e nos bits SYNC, BRGH e BRGH16, de maneira a obter Baud Rates padronizadas. As fórmulas usadas para determinar o Baurd Rate, são: 134
![A fórmula usada para calcular o Baud Rate, é dada pela tabela abaixo: Bits SYNC BRG1G BRGH BRG / EUSART Mode Baud Rate Formula 0 0 0 8-bit / assíncrono Fosc / [64 (n + 1)] 0 0 1 8-bit / assíncrono](/docs-images/42/3014207/images/page_12.jpg "Fosc / [16 (n + 1)] 0 1 0 16-bit / assíncrono Fosc / [16 (n + 1)] 0 1 1 16-bit / assíncrono Fosc / [4 (n + 1)] 1 0 x 16-bit / assíncrono Fosc / [4 (n + 1)] 1 1 x 16-bit / assíncrono Fosc / [4 (n +")
13 135

14 136

15 Registo BAUDCTL 137
16 ABDOVF - Flag de Overflow da detecção de Auto-Baud-Rate, é apenas usado no modo assíncrono, durante a detecção do baud rate 1 - Temporizador Auto Baud Rate chegou ao fim 0 - Temporizador Auto Baud Rate não chegou ao fim RCIDL - Flag de Recepção parada, apenas usado no modo assíncrono 1 - A recepção está parada 0 - O START bit foi recebido, e a recepção está em progresso. SCKP - Bit de selecção da polaridade do Relógio Síncrono Modo Assíncrono: 1 - Dados invertidos na transmissão no pino RC6/TX/CK 0 - Dados não invertidos na transmissão no pino RC6/TX/CK Modo Síncrono: 1 - Sincronização no flanco ascendente do relógio 0 - Síncronização no flanco descendente do relógio WUE - Bit que habilita o Wake-up ( acordar ) pela EUSART 1 - O receptor aguarda por um flanco descendente no pino RC7/RX/DT, para acordar o microcontrolador do modo Sleep 0 - O receptor funciona normalmente ABDEN - Bit de habilitação de Detecção Automática do Baud Rate, apenas em modo assíncrono 1 - Modo de detecção automática do baud rate está ligado. Este bit é automaticamente limpo aquando da detecção do baud rate 0 - Modo de detecção automática do baud rate está desligado 138
 pela EUSART 1 - O receptor aguarda por um")
17 Resumidamente: Enviar dados pela EUSART em modo assíncrono: O baud rate deverá ser ajustado, pelos bits BRGH do registo TXSTA, e BRG16 do registo BAUDCTL, e pelos registos SPBRGH espbrg; O bit SYNC do TXSTA deverá ser limpo, e o bit SPEN do RCSTA deverá ser activado, de maneira a ligar a porta série; Na transmissão de 9 bits, o bit TX9 do TXSTA deverá ser activado; A transmissão de dados é habilitada, activando o bit TXEN do TXSTA. O bit TXIF do PIR1 é automaticamente activado; Se for necessário haver um interrupção, o bit TXIE do PIE1, e os GIE e PEIE do INTCON deverão ser activados; Na transmissão de 9 bits, o valor do nono bit deverá ser escrito no bit TX9D do TXSTA; A transmissão inicia quando se escreve no registo TXREG; Receber dados pela EURSAR em modo assíncrono: O baud rate deverá ser ajustado, pelos bits BRGH do registo TXSTA, e BRG16 do registo BAUDCTL, e pelos registos SPBRGH espbrg; O bit SYNC do TXSTA deverá ser limpo, e o bit SPEN do RCSTA deverá ser activado, de maneira a ligar a porta série; Se for necessário haver uma interrupção, o bit RCIE do PIE1, e os GIE e PEIE do INTCON deverão ser activados; Na recepção de 9 bits, o bit RX9 do RCSTA deverá ser activado; A recepção de dados deverá ser habilitada, activando o bit CREN do RXSTA; O registo RCSTA deverá ser lido, para tirar a informação de possiveis erros que ocorreram durante a transmisssão. Na recepção a 9 bits, o nono bit estará armazenado neste registo; O byte recebido e armazenado no registo RCREG, deverá ser lido. 139

18 Activar o modo de Detecção de Endereço: O baud rate deverá ser ajustado, pelos bits BRGH do registo TXSTA, e BRG16 do registo BAUDCTL, e pelos registos SPBRGH e SPBRG; O bit SYNC do TXSTA deverá ser limpo, e o bit SPEN do RCSTA deverá ser activado, de maneira a ligar a porta série; Se for necessário haver uma interrupção, o bit RCIE do PIE1, e os GIE e PEIE do INTCON deverão ser activados; O bit RX9 do RCSTA deverá ser activado; O bit ADDEN do RCSTA deverá ser activado, o que habilita que um caracter recebido, seja interpretado como endereço; A recepção de dados deverá ser habilitada, activando o bit CREN do RXSTA; Imediatamente após os 9 bits serem recebidos, o bit RCIF do PIR1 é automaticamente activado. Se habilitada, uma interrupção é gerada; O registo RCSTA deverá ser lido, para tirar a informação de possiveis erros que ocorreram durante a transmisssão. Na recepção a 9 bits, o nono bit estará armazenado neste registo; Os 8 bits recebidos e armazenados no registo RCREG, deverão ser lidos. Agora deve ser feita a verificação do endereço. Se coincidirem, é necessário limpar o bit ADDEN do RCSTA, o que possibilita a continuidade da recepção em 8 bits. 140

19 Modo Síncrono da EUSART O módulo MSSP - Master Sínchronous Serial Port, Porta Série Síncrona Mestre, é bastante útil, porque é ao mesmo tempo um dos mais complexos circuitos dentro do microcontrolador. Ele permite comunicações de alta velocidade entre o microcontrolador e periféricos externos, usando algumas linhas de I/O. É comum usá-lo para ligar a ecrãns LCD, conversores A/D, EEPROM s série, shift-registers, entre outros. A principal funcionalidade deste tipo de comunicações é a de ser síncrona, e óptimo para sistemas onde há um só Mestre, e um ou mais Escravos. O dispositivo Mestre tem os circuitos necessários para a geração do Baud Rate, e fornece o Relógio para todos os dispositivos do sistema. Os dispositivos Escravos, podem dessa maneira, eliminar o gerador de Relógio interno. O módulo MSSP funciona das seguintes maneiras: Modo SPI, Serial Peripheral Interface Modo I2C, Inter-Integrated Circuit Módulo MSSP 141

20 Como se pode ver na figura, um módulo MSSP representa metade do hardware necessário para estabelecer uma comunicação série, enquanto que a outra metade está presente no dispositivo com que se vai trocar a informação. Apesar dos módulos serem iguais em ambos os lados, os seus modos são essencialmente diferentes, dependendo se operam como Mestre ou Escravo: Se o microcontrolador a ser programado, controla outros dispositivos, então vai funcionar como Mestre. Um módulo definido como tal, vai gerar o relógio quando necessário, e apenas quando informação é enviada/recebida. Depende do Mestre, se a ligação é estabelecida, ou não. Se o microcontrolador a ser programado, é parte de um sistema periférico, então vai funcionar como dispositivo Escravo. Então, terá sempre de aguardar os pedidos por parte do Mestre. Modo SPI O modo de SPI permite o envio/recepção simultânea, de dados de 8 bits, usando 3 linhas I/O; SDO - Saída de dados série - linha de transmissão; SDI - Entrada de dados série - linha de recepção; SCK - Relógio série - linha de síncronização. Em conjunto com esta linha, se o microcontrolador trocar informação com vários periféricos, a quarta linha, SS, também pode ser usada. Ver figura abaixo. SS - Selecção de Escravo - um pino adicional usado para selecção de dispositivo. Está apenas activo se o microcontrolador está em modo Escravo. Quando opera em modo SPI, o módulo MSSP usa um total de 4 registos: SSPSTAT - registo de estado; 142

21 SSPCON - registo de controlo; SSPBUF - registo de armazenamento de dados; SSPSR - shift register (não disponivel directamente) Os primeiros três registos são possiveis de escrever/ler, e podem ser alterado a qualquer momento, enquanto que o quarto registo, como não está disponivel, é usado para converter os dados para formato série. Modo SPI Como pode ser visto na figura abaixo, o cerne do módulo SPI consiste em, dois registos ligados aos pinos para receber, transmitir e sincronizar. Modo SPI O Shift Register, SSPRS, é directamente ligado aos pinos do microcontrolador, e usado para transmissão de dados em formato série. O SSPRS tem a sua entrada e saída, e desloca os dados para dentro/fora do dispositivo. Por outras palavras, cada bit que aparece na entrada (linha de recepção) simultaneamente empurra outro bit para a saída (linha de transmissão). 143
22 O registo SSPBUF, é um bloco de memória para temporariamente armazenar a informação escrita no SSPRS, até que os dados recebidos estejam prontos. Após a recepção dos 8 bits de dados, esse byte é deslocado para o SSPBUF. Esta dupla memória dos dados recebidos, SSPBUF, permite ao próximo byte ser recebido, antes de ler os dados acabados de receber. Qualquer escrita no SSPBUF durante a transmissão/recepção de dados, é ignorada. Nomeadamente, se as configurações do modo forem esquecidas, a transferência de dados SPI significa que apenas se escreve e lê deste registo. Enquanto que o funcionamento do módulo em si, é automaticamente feito por hardware. Resumidamente: Antes de inicializar o SPI, é necessário especificar certos pontos: Modo Mestre, o pino SCK é a saída de relógio; Modo Escravo, o pino SCK é a entrada de relógio; Fase do bit de entrada, no meio ou no fim do ciclo de relógio, bit SMP; Flanco do relógio, bit CKE; Baud Rate, só no modo Mestre; Modo de selecção de Escravo, no modo Escravo apenas. Passo 1 O byte a transmitir, deve ser escrito para a memória temporária SSPBUF. Imediatamente depois, se o módulo SPI opera em modo Mestre, o microcontrolador vai automaticamente fazer os passos 2, 3 e 4. Se o módulo SPI opera como Escravo, o microcontrolador não vai fazer nenhum destes passos, até que o pino SCK detectar um sinal de relógio. 144
23 Passo 2 Este byte é agora deslocado para o registo SSPSR, e a memória temporária SSPBUF não é limpa. Passo 3 Sincronizado com o relógio de entrada, este byte é empurrado para o pino de saída, sendo o MSB primeiro, enquanto o registo é simultaneamente preenchido com bits do pino de entrada. No modo Mestre, o microcontrolador gera o relógio, enquanto o Escravo usa o relógio externo SCK. Passo 4 O registo SSPSR está preenchido, quando os 8 bits de dados forem recebidos. É indicado activando os bits BF e SSPIF. O byte recebido é automaticamente movido do SSPSR para o SSPBUF. Como a transferência é feita automaticamente, o programa principal é normalmente executado, enquanto a transferência está em progresso. Nesse caso, a função do bit SSPIF é gerar uma interrupção, quando a transmissão está completa. Passo 5 Finalmente, o byte armazenado no SSPBUF está pronto a ser usado, e movido para qualquer registo disponivel. 145
24 Modo I2C O modo I2C é especialmente útil quando, o microcontrolador e um circuito integrado com o qual o micro deverá trocar informação, estiverem montados no mesmo sistema. Esta forma de transmissão de dados é comum a outros microcontroladores, ou circuitos integrados especializados, tais como memórias, sensores de temperatura, expansores de porta, relógios em tempo-real, etc. Similarmente ao SPI, a transferência de dados por I2C é síncrona e bidireccional. Desta vez, apenas dois pinos são usados para a transferência de dados. Estes são o SDA, dados série, e o SCL, relógio série. O programador deve configurar estes pinos como entradas/saídas, através dos bits do TRISC. Provavelmente não é directamente perceptivel, mas observando regras particulares (protocolos), este modo possibilita que 122 dispositivos diferentes estajam simultaneamente ligados, usando apenas dois pinos I/O. Funciona da seguinte maneira; o relógio necessário para sincronizar a operação de ambos os dispositivos, é sempre gerado pelo Mestre. A frequência de relógio mais habitual é de 100KHz, mas não há limite no caso de frequência mínima. Quando o Mestre e Escravo estão sincronizados com o relógio, toda a troca de dados é sempre iniciada pelo Mestre. Assim que o módulo MSSP está activo, fica a aguardar uma condição de Start. Primeiro, o Mestre envia o bit de Start, depois o endereço de 7 bits do Escravo, e finalmente o bit que especifica se vai ler ou escrever no Escravo. A seguir ao bit de Start, os oito bits são enviados para o registo SSPSR. Todos os Escravos partilham a linha de transmissão, e vão simultaneamente receber o primeiro byte, mas apenas um deles tem o endereço coincidente. Configuração Mestre e Escravo 146
25 Depois do primeiro byte ter sido enviado, o Mestre entra em modo de recepção, e aguarda o ACK - Acknowledge (confirmação) do Escravo com o endereço coindicente. Se o Escravo envia um ACK lógico 1, a transferência vai continuar até o Mestre enviar o bit de Stop. Esta é uma simples explicação de como dois dispositivos comunicam. Se necessário, este microcontrolador é capaz de controlar situações mais complicadas, onde 1024 dispositivos diferentes, partilhados por diferentes Mestres, estão ligados. Transferência de Dados A figura em baixo, mostra o diagrama de blocos do módulo MSSP no modo I2C: 147
26 Diagrama de blocos do módulo MSSP, em modo I2C O módulo usa estes registos, para trabalhar em I2C. SSPCON - registo de controlo 1 SSPCON2 - registo de controlo 2 SSPSTAT - registo de estado SSPBUF - registo de memória temporária para transmissão/recepção SSPSR - registo Shift-Register (não directamente acessível) SSPADD - registo de endereço SSPMSK - registo de máscara. 148
27 Registo SSPSTAT SMP - Bit de amostragem Modo SPI Mestre, este bit indica a fase dos dados 1 - O estado lógico é lido no fim do ciclo de relógio, 0 - O estado lógico é lido no meio do ciclo de relógio. Modo SPI Escravo. Este bit deve estar limpo, quando se usa SPI Escravo Modo I2C, Mestre ou Escravo 1 - Slew Rate - Controlo de interferências desligado, para velocidades de 100KHz; 0 - Slew Rate - Controlo de interferências ligado, para velocidades de 400KHz ou maiores. CKE - Bit de selecção do flanco de relógio CKP=0: 1 - Os dados são transmitidos no flanco ascendente; 0 - Os dados são transmitidos no flanco descendente. CKP=1: 1 - Os dados são transmitidos no flanco descendente. 0 - Os dados são transmitidos no flanco ascendente; D/A - bit de Dados/Endereço, é usado no modo I2C apenas 1 - Indica que o último byte recebido ou transmitido, foi de dados; 0 - Indica que o último byte recebido ou transmitido, foi de endereço. P - O bit de Stop, é usado no modo I2C apenas 1 - O Stop bit foi detectado; 149
28 0 - O Stop bit não foi detectado; S - Bit de Start, é usado no modo I2C apenas 1 - O bit de Start foi detectado; 0 - O bit de Start não foi detectado; R/W - Bit de Escrita/Leitura, usado em I2C apenas. Este bit guarda a informação R/W a seguir ao endereço. Só é válido desde a coincidência de endereço, até ao próximo bit de Start, Stop ou não-ack. I2C Escravo: 1 - Ler dados; 0 - Escrever dados. I2C Mestre: 1 - Transmissão em progresso; 0 - Transmissão parada. UA - Bit de refrescamento do endereço. É usado no modo de 10 bits de I2C. 1 - Indica que é necessário fazer o refrescamento do endereço no registo SSPADD; 0 - O endereço no SSPADD está correcto, e não precisa de ser refrescado. BF - Bit de estado do Buffer - memória intermédia temporária Durante a recepção em SPI ou I2C: 1 - Recepção completa. O SSPBUF está completo; 0 - Recepção não completa. O SSPBUF está vazio. Durante a transmissão em SPI ou I2C: 1 - Transmissão de dados em andamento (não inclui os bits ACK e STOP); 0 - Transmissão de dados completa (não inclui os bits ACK e STOP). 150
29 Registo SSPCON WCOL - bit de detecção de Colisão de Escrita 1 - Colisão detectada. Uma escrita para o SSPBUF foi tentada, enquanto que a condição I2C não era válida para uma transmissão se iniciar; 0 - Não houve colisão. SSPOV - Bit indicador de Overflow de Recepção 1 - Um novo byte foi recebido, enquanto o SSPSR continha o byte anterior. Como não há espaço para a recepção dos dados, um destes dois bytes deve ser limpo. Neste caso, o byte dentro do SSPSR é perdido; 0 - Dados série correctamente recebidos. SSPEN - Bit que habilita a porta série síncrona, e inicializa o módulo MSSP: No modo SPI: 1 - Liga módulo MSSP e configura os pinos SCK, SDO, SDI e SS, para a porta série; 0 - Desliga módulo MSSP e configura estes pinos como portas I/O. No modo I2C: 1 - Liga módulo MSSP e configura os pinos SDA e SCL, para a porta série; 0 - Desliga módulo MSSP e configura estes pinos como portas I/O. CKP - Bit de selecção da polaridade do Relógio, não usado em I2C Mestre No modo SPI: 1 - Modo de descanso para o relógio, é nível lógico alto; 0 - Modo de descanso para o relógio, é nível lógico baixo. No modo I2C Escravo: 151
30 1 - Habilita o relógio; 0 - Mantém o relógio a estado lógico 0, para dar mais tempo à estabilização dos dados. SSPM3-SSPM0 - Bits de selecção da porta série Síncrona. O modo é definido por estes três bits: SSPM3 SSPM2 SSPM1 SSPM0 Mode SPI Mestre, clock = Fosc/ SPI Mestre, clock = Fosc/ SPI Mestre, clock = Fosc/ SPI Mestre, clock = (saída TMR)/ SPI Escravo, pino SS de controlo ligado SPI Escravo, pino SS de controlo desligado, SS pode ser usado como pino I/O I²C Escravo, endereço de 7-bit usado I²C Escravo, endereço de 10-bit usado I²C Mestre, clock = Fosc / [4(SSPAD+1)] Máscara usada no modo I²C Escravo Não usado Modo controlado I²C Mestre Não usado Não usado I²C Escravo, endereço de 7-bit usado, bits START e STOP activam a interrupção I²C Escravo, endereço de 10-bit usado, bits START e STOP activam a interrupção Registo SSPCON2 152
31 GCEN - Bit de habilitação de Chamada Geral No modo I2C Escravo apenas: 1 - Habilita uma interrupção, quando uma chamada geral de endereço 0x000 é recebida no SSPSR; 0 - Chamada geral de endereço desligado. ACKSTAT - Bit de estado de ACKnowledge - confirmação No modo I2C Mestre transmissão apenas: 1 - ACK não foi recebido do Escravo; 0 - ACK foi recebido do Escravo. ACKDT - Bit de ACKnowledge No modo I2C Mestre recepção apenas: 1 - Não houve ACK; 0 - Houve ACK. ACKEN - Bit de habilitação de ACKnowledge No modo I2C Mestre recepção apenas: 1 - Inicia condição ACK nos pinos SDA e SCL, e transmite bit ACKDT. É automaticamente limpo por hardware; 0 - Condição ACK não iniciada. RCEN - Bit habilitação da Recepção No modo I2C Mestre apenas: 1 - Possibilita a recepção no modo I2C; 0 - Recepção desligada. PEN - Bit de habilitação da condição de STOP No modo I2C Mestre apenas: 1 - Inicia uma condição de STOP nos pinos SDA e SCL. Seguidamente, este bit é automaticamente limpo por hardware; 0 - Condição de STOP não iniciada. 153
32 RSEN - Bit de habilitação da condição de Repetição de START No modo I2C Mestre apenas: 1 - Inicia uma condição de START nos pinos SDA e SCL. Seguidamente, este bit é automaticamente limpo por hardware; 0 - A repetição de START não é iniciada. SEN - Bit de habilitação de condição de START ligada/prolongada (Enabled/Stretch) No modo I2C Mestre apenas: 1 - Inicia uma condição de START nos pinos SDA e SCL. Seguidamente, este bit é automaticamente limpo por hardware; 0 - A condição de START não é iniciada. I2C em modo Mestre O caso mais comum é quando o microcontrolador funciona como Mestre, e os periféricos como Escravos. Esta é a razão de apenas se falar aqui deste modo. Também se vai considerar que o endereço é de 7 bits, e o sistema electrónico só tem um microcontrolador, ou um só mestre. De maneira a ligar o módulo MSSP neste modo, é necessário fazer o seguinte: Configurar o Baud Rate, registo SSPADD; Configurar o Slew Rate - Controlo de interferências, bit SMP no registo SSPSTAT; Seleccionar o modo, registo SSPCON. Depois destes passo feitos, e do módulo ter sido ligado pelo bit SSPEN do SSPCON, deverá esperar-se pela electrónica interna indicar que está pronta para transmissão: bit SSPIF do registo PIR1 activado. Este bit deverá ser limpo por software, e seguidamente o microcontrolador está pronto a iniciar uma comunicação com os periféricos. 154
Acetatos de apoio às aulas teóricas
 Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 16 de Dezembro de 2004 Microprocessadores
Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 16 de Dezembro de 2004 Microprocessadores
Acetatos de apoio às aulas teóricas
 Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 8 de Dezembro de 2005 Microprocessadores
Microprocessadores e Aplicações Acetatos de apoio às aulas teóricas Ana Cristina Lopes Dep. Engenharia Electrotécnica http://orion.ipt.pt anacris@ipt.pt Ana Cristina Lopes, 8 de Dezembro de 2005 Microprocessadores
CAPÍTULO 5. INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO
 28 CAPÍTULO 5 INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO Interfaces para periféricos de armazenamento: Periféricos de armazenamento,
28 CAPÍTULO 5 INTERFACES PARA PERIFÉRICOS DE ARMAZENAMENTO INTERFACES DIVERSAS: FIREWIRE, SPI e I 2 C INTERFACES COM O MUNDO ANALÓGICO Interfaces para periféricos de armazenamento: Periféricos de armazenamento,
Interrupções. As interrupções são casos especiais de chamadas de procedimentos.
 Interrupções Uma interrupção é equivalente a uma chamada de procedimento. A chamada é equivalente a um CALL gerado pela execução de uma instrução. As interrupções são casos especiais de chamadas de procedimentos.
Interrupções Uma interrupção é equivalente a uma chamada de procedimento. A chamada é equivalente a um CALL gerado pela execução de uma instrução. As interrupções são casos especiais de chamadas de procedimentos.
5 Entrada e Saída de Dados:
 5 Entrada e Saída de Dados: 5.1 - Arquitetura de Entrada e Saída: O sistema de entrada e saída de dados é o responsável pela ligação do sistema computacional com o mundo externo. Através de dispositivos
5 Entrada e Saída de Dados: 5.1 - Arquitetura de Entrada e Saída: O sistema de entrada e saída de dados é o responsável pela ligação do sistema computacional com o mundo externo. Através de dispositivos
O protocolo I2C. Fig. 1 Diagrama em blocos e pinos do circuito integrado PT2313.
 O protocolo I2C 1 - Introdução O protocolo I2C ou I 2 C, também chamado IIC, foi criado para possibilitar a comunicação entre circuitos integrados com um número reduzido de fios, reduzindo o número de
O protocolo I2C 1 - Introdução O protocolo I2C ou I 2 C, também chamado IIC, foi criado para possibilitar a comunicação entre circuitos integrados com um número reduzido de fios, reduzindo o número de
Comunicação de dados. Introdução
 Comunicação de dados Introdução Os microcontroladores AVR estão equipados com dois pinos destinados à comunicação serial, UART (Universal Asynchronous Reciever/Transmitter), ou seja, permitem trocar informações
Comunicação de dados Introdução Os microcontroladores AVR estão equipados com dois pinos destinados à comunicação serial, UART (Universal Asynchronous Reciever/Transmitter), ou seja, permitem trocar informações
Comunicação Serial PIC16F877A. Leandro Resende Mattioli. Centro Federal de Educação Tecnológica de Minas Gerais Unidade Araxá
 Síncrona Assíncrona PIC16F877A Leandro Resende Mattioli Centro Federal de Educação Tecnológica de Minas Gerais Unidade Araxá Sumário Síncrona Assíncrona 1 2 Síncrona 3 Assíncrona 4 5 Síncrona Assíncrona
Síncrona Assíncrona PIC16F877A Leandro Resende Mattioli Centro Federal de Educação Tecnológica de Minas Gerais Unidade Araxá Sumário Síncrona Assíncrona 1 2 Síncrona 3 Assíncrona 4 5 Síncrona Assíncrona
A idéia hardware sugerida é colocar a placa entre o PC e o microcontrolador, conforme mostrado no esquema abaixo.
 Circuito de gravação (AVR programmer) Introdução Nossa proposta, nesta parte do trabalho, é apresentar um circuito para gravação ISP (In-System- Programming) para microcontroladores AVR. Este circuito,
Circuito de gravação (AVR programmer) Introdução Nossa proposta, nesta parte do trabalho, é apresentar um circuito para gravação ISP (In-System- Programming) para microcontroladores AVR. Este circuito,
Dispositivos de Entrada e Saída
 SEL-0415 Introdução à Organização de Computadores Dispositivos de Entrada e Saída Aula 9 Prof. Dr. Marcelo Andrade da Costa Vieira ENTRADA e SAÍDA (E/S) (I/O - Input/Output) n Inserção dos dados (programa)
SEL-0415 Introdução à Organização de Computadores Dispositivos de Entrada e Saída Aula 9 Prof. Dr. Marcelo Andrade da Costa Vieira ENTRADA e SAÍDA (E/S) (I/O - Input/Output) n Inserção dos dados (programa)
BARRAMENTO DO SISTEMA
 BARRAMENTO DO SISTEMA Memória Principal Processador Barramento local Memória cachê/ ponte Barramento de sistema SCSI FireWire Dispositivo gráfico Controlador de vídeo Rede Local Barramento de alta velocidade
BARRAMENTO DO SISTEMA Memória Principal Processador Barramento local Memória cachê/ ponte Barramento de sistema SCSI FireWire Dispositivo gráfico Controlador de vídeo Rede Local Barramento de alta velocidade
Porta Série. Trabalhos Práticos AM 2007/2008. Porta Série. Objectivos
 3 Objectivos - Configurar os parâmetros associados à comunicação série assíncrona. - Saber implementar um mecanismo de menus para efectuar a entrada e saída de dados, utilizando como interface um terminal
3 Objectivos - Configurar os parâmetros associados à comunicação série assíncrona. - Saber implementar um mecanismo de menus para efectuar a entrada e saída de dados, utilizando como interface um terminal
www.vwsolucoes.com Copyright 2013 VW Soluções
 1 1. Especificação técnicas: Dimensões do módulo 4EA2SA v1.0: 100 mm x 56 mm Peso aproximado: xxx gramas (montada). Alimentação do circuito : 12 ou 24Vcc Tipo de comunicação: RS232 ou RS485 Tensão de referencia:
1 1. Especificação técnicas: Dimensões do módulo 4EA2SA v1.0: 100 mm x 56 mm Peso aproximado: xxx gramas (montada). Alimentação do circuito : 12 ou 24Vcc Tipo de comunicação: RS232 ou RS485 Tensão de referencia:
CAPÍTULO 2 CARACTERÍSTICAS DE E/S E PORTA PARALELA
 8 CAPÍTULO 2 CARACTERÍSTICAS DE E/S E PORTA PARALELA A porta paralela, também conhecida por printer port ou Centronics e a porta serial (RS-232) são interfaces bastante comuns que, apesar de estarem praticamente
8 CAPÍTULO 2 CARACTERÍSTICAS DE E/S E PORTA PARALELA A porta paralela, também conhecida por printer port ou Centronics e a porta serial (RS-232) são interfaces bastante comuns que, apesar de estarem praticamente
Arquitetura de Computadores. Tipos de Instruções
 Arquitetura de Computadores Tipos de Instruções Tipos de instruções Instruções de movimento de dados Operações diádicas Operações monádicas Instruções de comparação e desvio condicional Instruções de chamada
Arquitetura de Computadores Tipos de Instruções Tipos de instruções Instruções de movimento de dados Operações diádicas Operações monádicas Instruções de comparação e desvio condicional Instruções de chamada
Vitor Amadeu Souza. vitor@cerne-tec.com.br
 Introdução Vitor Amadeu Souza vitor@cerne-tec.com.br Veremos agora os passos para enviar uma string de caracteres pela USB. Porém antes veremos um tutorial referente a porta USB. Tutorial USB Sistema de
Introdução Vitor Amadeu Souza vitor@cerne-tec.com.br Veremos agora os passos para enviar uma string de caracteres pela USB. Porém antes veremos um tutorial referente a porta USB. Tutorial USB Sistema de
Entrada e Saída. Interface entre periféricos, processador e memória. Fonte: Minho - Portugal 1
 Entrada e Saída Interface entre periféricos, processador e memória Fonte: Minho - Portugal 1 Ligação Processador/Memória - Periférico Processador Memória Controlo Dados Controlador Fonte: Minho - Portugal
Entrada e Saída Interface entre periféricos, processador e memória Fonte: Minho - Portugal 1 Ligação Processador/Memória - Periférico Processador Memória Controlo Dados Controlador Fonte: Minho - Portugal
FAÇA FÁCIL: DRIVER IGS PARA COMUNICAÇÃO DE PROTOCOLOS PROPRIETÁRIOS INTRODUÇÃO
 FAÇA FÁCIL: DRIVER IGS PARA COMUNICAÇÃO DE PROTOCOLOS PROPRIETÁRIOS INTRODUÇÃO O Driver IGS possui um módulo de configuração que possibilita a comunicação com protocolos proprietários. Trata-se do Driver
FAÇA FÁCIL: DRIVER IGS PARA COMUNICAÇÃO DE PROTOCOLOS PROPRIETÁRIOS INTRODUÇÃO O Driver IGS possui um módulo de configuração que possibilita a comunicação com protocolos proprietários. Trata-se do Driver
Prática 8: Comunicação SPI. 8.1 Introdução e objetivos. 8.2 Princípios básicos do protocolo SPI
 Prática 8: 8.1 Introdução e objetivos Comunicação SPI O protocolo SPI (serial peripheral interface) é um método de comunicação utilizado para interconectar dispositivos ou chips de tal forma que estes
Prática 8: 8.1 Introdução e objetivos Comunicação SPI O protocolo SPI (serial peripheral interface) é um método de comunicação utilizado para interconectar dispositivos ou chips de tal forma que estes
O protocolo MODBUS define também o tipo diálogo entre os equipamentos, define por exemplo quem pode enviar dados e em que altura.
 Universidade de Aveiro Departamento de Engenharia Mecânica Informática Industrial 2010/2011 5 PROTOCOLO DE COMUNICAÇÃO MODBUS 5.1 Protocolo de comunicação MODBUS Este protocolo foi proposto em 1979 pela
Universidade de Aveiro Departamento de Engenharia Mecânica Informática Industrial 2010/2011 5 PROTOCOLO DE COMUNICAÇÃO MODBUS 5.1 Protocolo de comunicação MODBUS Este protocolo foi proposto em 1979 pela
Placa Acessório Modem Impacta
 manual do usuário Placa Acessório Modem Impacta Parabéns, você acaba de adquirir um produto com a qualidade e segurança Intelbras. A Placa Modem é um acessório que poderá ser utilizado em todas as centrais
manual do usuário Placa Acessório Modem Impacta Parabéns, você acaba de adquirir um produto com a qualidade e segurança Intelbras. A Placa Modem é um acessório que poderá ser utilizado em todas as centrais
Organização e Arquitetura de Computadores
 Organização e Arquitetura de Computadores Entrada e saída Alexandre Amory Edson Moreno Nas Aulas Anteriores Foco na Arquitetura e Organização internas da Cleo Modelo Von Neuman Circuito combinacional Circuito
Organização e Arquitetura de Computadores Entrada e saída Alexandre Amory Edson Moreno Nas Aulas Anteriores Foco na Arquitetura e Organização internas da Cleo Modelo Von Neuman Circuito combinacional Circuito
Estrutura interna de um microcontrolador
 Estrutura interna de um microcontrolador Um microcontrolador é composto por um conjunto de periféricos interligados a uma unidade de processamento e todo este conjunto confere a este componente uma versatilidade
Estrutura interna de um microcontrolador Um microcontrolador é composto por um conjunto de periféricos interligados a uma unidade de processamento e todo este conjunto confere a este componente uma versatilidade
Arquitetura e Organização de Computadores I
 Arquitetura e Organização de Computadores I Interrupções e Estrutura de Interconexão Prof. Material adaptado e traduzido de: STALLINGS, William. Arquitetura e Organização de Computadores. 5ª edição Interrupções
Arquitetura e Organização de Computadores I Interrupções e Estrutura de Interconexão Prof. Material adaptado e traduzido de: STALLINGS, William. Arquitetura e Organização de Computadores. 5ª edição Interrupções
Manual Técnico Interface Modbus
 Manual Técnico Interface Modbus RTA Interface Modbus 05/2007-1 - Histórico de Revisões Ver. Num. Data Responsável Observações 1.000 17/05/07 Marcos Romano Criação Inicial RTA Rede de Tecnologia Avançada
Manual Técnico Interface Modbus RTA Interface Modbus 05/2007-1 - Histórico de Revisões Ver. Num. Data Responsável Observações 1.000 17/05/07 Marcos Romano Criação Inicial RTA Rede de Tecnologia Avançada
Arquitetura CAN. José Sérgio da Rocha Neto
 Arquitetura CAN 1 Sumário Rede CAN. Arquitetura do Sistema Implementado. Interface SPI. Controlador CAN MCP2510. Transceiver MCP2551. ADuC812. Resultados Obtidos. Conclusões. 2 REDE CAN CAN Controller
Arquitetura CAN 1 Sumário Rede CAN. Arquitetura do Sistema Implementado. Interface SPI. Controlador CAN MCP2510. Transceiver MCP2551. ADuC812. Resultados Obtidos. Conclusões. 2 REDE CAN CAN Controller
Na primeira aula, conhecemos um pouco sobre o projeto Arduino, sua família de placas, os Shields e diversos exemplos de aplicações.
 Na primeira aula, conhecemos um pouco sobre o projeto Arduino, sua família de placas, os Shields e diversos exemplos de aplicações. A partir de agora, iremos conhecer o hardware do Arduino e suas caracteristicas
Na primeira aula, conhecemos um pouco sobre o projeto Arduino, sua família de placas, os Shields e diversos exemplos de aplicações. A partir de agora, iremos conhecer o hardware do Arduino e suas caracteristicas
Quadro de consulta (solicitação do mestre)
") Introdução ao protocolo MODBUS padrão RTU O Protocolo MODBUS foi criado no final dos anos 70 para comunicação entre controladores da MODICON. Por ser um dos primeiros protocolos com especificação aberta
Introdução ao protocolo MODBUS padrão RTU O Protocolo MODBUS foi criado no final dos anos 70 para comunicação entre controladores da MODICON. Por ser um dos primeiros protocolos com especificação aberta
Sistemas Embarcados. Comunicação em Sistemas Embarcados
 Sistemas Embarcados Comunicação em Sistemas Embarcados Comunicação em Sistemas Embarcados As necessidades de comunicação Os tipos de comunicação Meios de comunicação Protocolos de comunicação Periféricos
Sistemas Embarcados Comunicação em Sistemas Embarcados Comunicação em Sistemas Embarcados As necessidades de comunicação Os tipos de comunicação Meios de comunicação Protocolos de comunicação Periféricos
Arquitetura de Rede de Computadores
 TCP/IP Roteamento Arquitetura de Rede de Prof. Pedro Neto Aracaju Sergipe - 2011 Ementa da Disciplina 4. Roteamento i. Máscara de Rede ii. Sub-Redes iii. Números Binários e Máscara de Sub-Rede iv. O Roteador
TCP/IP Roteamento Arquitetura de Rede de Prof. Pedro Neto Aracaju Sergipe - 2011 Ementa da Disciplina 4. Roteamento i. Máscara de Rede ii. Sub-Redes iii. Números Binários e Máscara de Sub-Rede iv. O Roteador
Modelo Genérico de Módulo de E/S Grande variedade de periféricos
 Conteúdo Capítulo 7 Entrada/Saída Dispositivos externos Módulos E/S Técnicas de E/S E/S Programada E/S Conduzida por interrupções Processamento de interrupções Controlador Intel 82C59A Acesso Directo à
Conteúdo Capítulo 7 Entrada/Saída Dispositivos externos Módulos E/S Técnicas de E/S E/S Programada E/S Conduzida por interrupções Processamento de interrupções Controlador Intel 82C59A Acesso Directo à
Registros do 16F628A. Prof. Luiz Antonio Vargas Pinto Prof. Vargas
 Registros do 16F628A www.mikroe.com Prof. Luiz Antonio Vargas Pinto www.vargasp.com STATUS (03) STATUS (03) Após RESET Chave dos bancos STATUS (03) Bit 7: IRP - Seleção de banco de registradores 0 - seleciona
Registros do 16F628A www.mikroe.com Prof. Luiz Antonio Vargas Pinto www.vargasp.com STATUS (03) STATUS (03) Após RESET Chave dos bancos STATUS (03) Bit 7: IRP - Seleção de banco de registradores 0 - seleciona
ARQUITETURA DE COMPUTADORES
 01001111 01110010 01100111 01100001 01101110 01101001 01111010 01100001 11100111 11100011 01101111 00100000 01100100 01100101 00100000 01000011 01101111 01101101 01110000 01110101 01110100 01100001 01100100
01001111 01110010 01100111 01100001 01101110 01101001 01111010 01100001 11100111 11100011 01101111 00100000 01100100 01100101 00100000 01000011 01101111 01101101 01110000 01110101 01110100 01100001 01100100
Sistemas Operativos. Sumário. Estruturas de sistemas de computação. ! Operação de um sistema de computação. ! Estruturas de E/S
 Estruturas de sistemas de computação Sumário! Operação de um sistema de computação! Estruturas de E/S! Estruturas de armazenamento! Hierarquia de armazenamento 2 1 Arquitectura de um sistema de computação
Estruturas de sistemas de computação Sumário! Operação de um sistema de computação! Estruturas de E/S! Estruturas de armazenamento! Hierarquia de armazenamento 2 1 Arquitectura de um sistema de computação
Redes de Computadores. Trabalho de Laboratório Nº7
 Redes de Computadores Curso de Eng. Informática Curso de Eng. de Electrónica e Computadores Trabalho de Laboratório Nº7 Análise do tráfego na rede Protocolos TCP e UDP Objectivo Usar o Ethereal para visualizar
Redes de Computadores Curso de Eng. Informática Curso de Eng. de Electrónica e Computadores Trabalho de Laboratório Nº7 Análise do tráfego na rede Protocolos TCP e UDP Objectivo Usar o Ethereal para visualizar
Capítulo. Comunicação de Dados Capítulo 9
 Capítulo 9 Capítulo Este capítulo descreve o que é preciso saber para transferir programas entre a fx-7400g PLUS e certos modelos de calculadoras científicas com função de gráficos CASIO ligados com um
Capítulo 9 Capítulo Este capítulo descreve o que é preciso saber para transferir programas entre a fx-7400g PLUS e certos modelos de calculadoras científicas com função de gráficos CASIO ligados com um
Programação em BASIC para o PIC Mostrando Mensagens no Display LCD Vitor Amadeu Souza
 Programação em BASIC para o PIC Mostrando Mensagens no Display LCD Vitor Amadeu Souza Introdução Nesta terceira série de artigos que aborda a programação na linguagem BASIC para o microcontrolador PIC,
Programação em BASIC para o PIC Mostrando Mensagens no Display LCD Vitor Amadeu Souza Introdução Nesta terceira série de artigos que aborda a programação na linguagem BASIC para o microcontrolador PIC,
Entrada e Saída. Prof. Leonardo Barreto Campos 1
 Entrada e Saída Prof. Leonardo Barreto Campos 1 Sumário Introdução; Dispositivos Externos; E/S Programada; E/S Dirigida por Interrupção; Acesso Direto à Memória; Bibliografia. Prof. Leonardo Barreto Campos
Entrada e Saída Prof. Leonardo Barreto Campos 1 Sumário Introdução; Dispositivos Externos; E/S Programada; E/S Dirigida por Interrupção; Acesso Direto à Memória; Bibliografia. Prof. Leonardo Barreto Campos
Componentes básicos de um sistema computacional. Cap. 1 (Stallings)
") Componentes básicos de um sistema computacional Cap. 1 (Stallings) 1 Sistema de Operação Explora recursos de hardware de um ou mais processadores Provê um conjunto de serviços aos utilizadores Gerencia
Componentes básicos de um sistema computacional Cap. 1 (Stallings) 1 Sistema de Operação Explora recursos de hardware de um ou mais processadores Provê um conjunto de serviços aos utilizadores Gerencia
Entradas/Saídas. Programação por espera activa Programação por interrupções
 Entradas/Saídas Programação por espera activa Programação por interrupções Programação por espera activa 1. O programa lê o estado do periférico: CPU pede ao controlador (IN) o valor no registo ESTADO
Entradas/Saídas Programação por espera activa Programação por interrupções Programação por espera activa 1. O programa lê o estado do periférico: CPU pede ao controlador (IN) o valor no registo ESTADO
Sistemas Digitais Reconfiguráveis
 Departamento de Electrónica Telecomunicações e Informática Dezembro de 2006 Interface RS-232 para a TRENZ Daniel Baptista Nº 28703 O projecto O projecto consiste na construção da interface RS-232 e na
Departamento de Electrónica Telecomunicações e Informática Dezembro de 2006 Interface RS-232 para a TRENZ Daniel Baptista Nº 28703 O projecto O projecto consiste na construção da interface RS-232 e na
Sistemas Operacionais. Prof. André Y. Kusumoto andrekusumoto.unip@gmail.com
 Sistemas Operacionais Prof. André Y. Kusumoto andrekusumoto.unip@gmail.com Estruturas de Sistemas de Computação O sistema operacional precisa garantir a operação correta do sistema de computação. Operação
Sistemas Operacionais Prof. André Y. Kusumoto andrekusumoto.unip@gmail.com Estruturas de Sistemas de Computação O sistema operacional precisa garantir a operação correta do sistema de computação. Operação
Estrutura de um Computador
 SEL-0415 Introdução à Organização de Computadores Estrutura de um Computador Aula 7 Prof. Dr. Marcelo Andrade da Costa Vieira MODELO DE VON NEUMANN PRINCÍPIOS A arquitetura de um computador consiste de
SEL-0415 Introdução à Organização de Computadores Estrutura de um Computador Aula 7 Prof. Dr. Marcelo Andrade da Costa Vieira MODELO DE VON NEUMANN PRINCÍPIOS A arquitetura de um computador consiste de
WATCHDOG ELITE NTC OPÇÃO DE COMUNICAÇÕES SERIAIS
 WATCHDOG ELITE NTC OPÇÃO DE COMUNICAÇÕES SERIAIS O Watchdog é um equipamento complexo e realiza muitas funções. A função de comunicações é considerada uma função de baixa prioridade e por conta disso,
WATCHDOG ELITE NTC OPÇÃO DE COMUNICAÇÕES SERIAIS O Watchdog é um equipamento complexo e realiza muitas funções. A função de comunicações é considerada uma função de baixa prioridade e por conta disso,
TRANSMISSÃO DE DADOS Prof. Ricardo Rodrigues Barcelar http://www.ricardobarcelar.com
 - Aula 5-1. A CAMADA DE TRANSPORTE Parte 1 Responsável pela movimentação de dados, de forma eficiente e confiável, entre processos em execução nos equipamentos conectados a uma rede de computadores, independentemente
- Aula 5-1. A CAMADA DE TRANSPORTE Parte 1 Responsável pela movimentação de dados, de forma eficiente e confiável, entre processos em execução nos equipamentos conectados a uma rede de computadores, independentemente
Introdução aos Computadores
 Os Computadores revolucionaram as formas de processamento de Informação pela sua capacidade de tratar grandes quantidades de dados em curto espaço de tempo. Nos anos 60-80 os computadores eram máquinas
Os Computadores revolucionaram as formas de processamento de Informação pela sua capacidade de tratar grandes quantidades de dados em curto espaço de tempo. Nos anos 60-80 os computadores eram máquinas
Controladores Lógicos Programáveis CLP (parte-3)
") Controladores Lógicos Programáveis CLP (parte-3) Mapeamento de memória Na CPU (Unidade Central de Processamento) de um CLP, todas a informações do processo são armazenadas na memória. Essas informações
Controladores Lógicos Programáveis CLP (parte-3) Mapeamento de memória Na CPU (Unidade Central de Processamento) de um CLP, todas a informações do processo são armazenadas na memória. Essas informações
NETALARM GATEWAY Manual Usuário
 NETALARM GATEWAY Manual Usuário 1 Índice 1. Introdução... 3 2. Requisitos de Instalação... 3 3. Instalação... 3 4. Iniciando o programa... 5 4.1. Aba Serial... 5 4.2. Aba TCP... 6 4.3. Aba Protocolo...
NETALARM GATEWAY Manual Usuário 1 Índice 1. Introdução... 3 2. Requisitos de Instalação... 3 3. Instalação... 3 4. Iniciando o programa... 5 4.1. Aba Serial... 5 4.2. Aba TCP... 6 4.3. Aba Protocolo...
Software de aplicação Tebis
 5 Software de aplicação Tebis TL304C V 1 x 4 entradas TL310A V 1 x 10 entradas TL302B V 1 x 2 entradas TL304B V 1 x 4 entradas Referência do produto TXA304 TXA310 TXB302 TXB304 Descrição Módulo 4 entradas
5 Software de aplicação Tebis TL304C V 1 x 4 entradas TL310A V 1 x 10 entradas TL302B V 1 x 2 entradas TL304B V 1 x 4 entradas Referência do produto TXA304 TXA310 TXB302 TXB304 Descrição Módulo 4 entradas
Memórias Prof. Galvez Gonçalves
 Arquitetura e Organização de Computadores 1 s Prof. Galvez Gonçalves Objetivo: Compreender os tipos de memória e como elas são acionadas nos sistemas computacionais modernos. INTRODUÇÃO Nas aulas anteriores
Arquitetura e Organização de Computadores 1 s Prof. Galvez Gonçalves Objetivo: Compreender os tipos de memória e como elas são acionadas nos sistemas computacionais modernos. INTRODUÇÃO Nas aulas anteriores
Sistemas Tolerantes a Falhas. Aulas Práticas
 Sistemas Tolerantes a Falhas Aulas Práticas 1- Apresentação (1 aula) a. Introdução à programação em C para o sistema b. Utilização de entradas e saídas digitais A placa : constituição, ligação ao, carga
Sistemas Tolerantes a Falhas Aulas Práticas 1- Apresentação (1 aula) a. Introdução à programação em C para o sistema b. Utilização de entradas e saídas digitais A placa : constituição, ligação ao, carga
SISTEMAS OPERACIONAIS ABERTOS Prof. Ricardo Rodrigues Barcelar http://www.ricardobarcelar.com
 - Aula 2-1. PRINCÍPIOS DE SOFTWARE DE ENTRADA E SAÍDA (E/S) As metas gerais do software de entrada e saída é organizar o software como uma série de camadas, com as mais baixas preocupadas em esconder as
- Aula 2-1. PRINCÍPIOS DE SOFTWARE DE ENTRADA E SAÍDA (E/S) As metas gerais do software de entrada e saída é organizar o software como uma série de camadas, com as mais baixas preocupadas em esconder as
Protocolo TCP/IP. Neste caso cada computador da rede precisa de, pelo menos, dois parâmetros configurados:
 Protocolo TCP/IP Neste caso cada computador da rede precisa de, pelo menos, dois parâmetros configurados: Número IP Máscara de sub-rede O Número IP é um número no seguinte formato: x.y.z.w Não podem existir
Protocolo TCP/IP Neste caso cada computador da rede precisa de, pelo menos, dois parâmetros configurados: Número IP Máscara de sub-rede O Número IP é um número no seguinte formato: x.y.z.w Não podem existir
Ministério das Finanças Instituto de Informática. Departamento de Sistemas de Informação
 Ministério das Finanças Instituto de Informática Departamento de Sistemas de Informação Assiduidade para Calendários Específicos Junho 2010 Versão 6.0-2010 SUMÁRIO 1 OBJECTIVO 4 2 ECRÃ ELIMINADO 4 3 NOVOS
Ministério das Finanças Instituto de Informática Departamento de Sistemas de Informação Assiduidade para Calendários Específicos Junho 2010 Versão 6.0-2010 SUMÁRIO 1 OBJECTIVO 4 2 ECRÃ ELIMINADO 4 3 NOVOS
Introdução a Informática. Prof.: Roberto Franciscatto
 Introdução a Informática Prof.: Roberto Franciscatto 2.1 CONCEITO DE BIT O computador só pode identificar a informação através de sua elementar e restrita capacidade de distinguir entre dois estados: 0
Introdução a Informática Prof.: Roberto Franciscatto 2.1 CONCEITO DE BIT O computador só pode identificar a informação através de sua elementar e restrita capacidade de distinguir entre dois estados: 0
Arquitetura de Computadores Arquitetura de entrada e saída
 Arquitetura de Entrada e Saída Arquitetura de Computadores Arquitetura de entrada e saída Barramento Meio de transmissão de dados entre a CPU, a memória principal e os dispositivos de entrada e saída.
Arquitetura de Entrada e Saída Arquitetura de Computadores Arquitetura de entrada e saída Barramento Meio de transmissão de dados entre a CPU, a memória principal e os dispositivos de entrada e saída.
1. CAPÍTULO COMPUTADORES
 1. CAPÍTULO COMPUTADORES 1.1. Computadores Denomina-se computador uma máquina capaz de executar variados tipos de tratamento automático de informações ou processamento de dados. Os primeiros eram capazes
1. CAPÍTULO COMPUTADORES 1.1. Computadores Denomina-se computador uma máquina capaz de executar variados tipos de tratamento automático de informações ou processamento de dados. Os primeiros eram capazes
Capítulo 2. Numéricos e Códigos. 2011 Pearson Prentice Hall. Todos os direitos reservados.
 Capítulo 2 Sistemas Numéricos e Códigos slide 1 Os temas apresentados nesse capítulo são: Conversão entre sistemas numéricos. Decimal, binário, hexadecimal. Contagem hexadecimal. Representação de números
Capítulo 2 Sistemas Numéricos e Códigos slide 1 Os temas apresentados nesse capítulo são: Conversão entre sistemas numéricos. Decimal, binário, hexadecimal. Contagem hexadecimal. Representação de números
Kit de desenvolvimento ACEPIC 40N
 Kit de desenvolvimento ACEPIC 40N O Kit de desenvolvimento ACEPIC 40N foi desenvolvido tendo em vista a integração de vários periféricos numa só placa, além de permitir a inserção de módulos externos para
Kit de desenvolvimento ACEPIC 40N O Kit de desenvolvimento ACEPIC 40N foi desenvolvido tendo em vista a integração de vários periféricos numa só placa, além de permitir a inserção de módulos externos para
Central de Alarme de Oito Zonas
 Central de Alarme de Oito Zonas R02 ÍNDICE CARACTERÍSTICAS GERAIS:... 3 CARACTERÍSTICAS TÉCNICAS:... 3 CONHECENDO A CENTRAL:... 4 COMO A CENTRAL FUNCIONA:... 4 COMO APAGAR A MEMÓRIA DA CENTRAL:... 4 COMO
Central de Alarme de Oito Zonas R02 ÍNDICE CARACTERÍSTICAS GERAIS:... 3 CARACTERÍSTICAS TÉCNICAS:... 3 CONHECENDO A CENTRAL:... 4 COMO A CENTRAL FUNCIONA:... 4 COMO APAGAR A MEMÓRIA DA CENTRAL:... 4 COMO
MANUAL DE INSTALAÇÃO E PROGRAMAÇÃO CONVERSOR - IP / USB / SERIAL - 317 RV1
 MANUAL DE INSTALAÇÃO E PROGRAMAÇÃO CONVERSOR - IP / USB / SERIAL - 317 RV1 SÃO CAETANO DO SUL 06/06/2014 SUMÁRIO Descrição do Produto... 3 Características... 3 Configuração USB... 4 Configuração... 5 Página
MANUAL DE INSTALAÇÃO E PROGRAMAÇÃO CONVERSOR - IP / USB / SERIAL - 317 RV1 SÃO CAETANO DO SUL 06/06/2014 SUMÁRIO Descrição do Produto... 3 Características... 3 Configuração USB... 4 Configuração... 5 Página
Redes de Computadores
 Redes de Computadores Transmissão de dados Escola Superior de Tecnologia e Gestão Instituto Politécnico de Bragança Abril de 2006 Códigos de caracteres A informação é manuseada em blocos de 8 bits (bytes
Redes de Computadores Transmissão de dados Escola Superior de Tecnologia e Gestão Instituto Politécnico de Bragança Abril de 2006 Códigos de caracteres A informação é manuseada em blocos de 8 bits (bytes
WWW.cerne-tec.com.br. Comunicação USB com o PIC Vitor Amadeu Souza Parte II vitor@cerne-tec.com.br
 1 Comunicação USB com o PIC Vitor Amadeu Souza Parte II vitor@cerne-tec.com.br Continuando com o artigo apresentado na edição passada de comunicação USB com o PIC, continuaremos nesta edição o estudo do
1 Comunicação USB com o PIC Vitor Amadeu Souza Parte II vitor@cerne-tec.com.br Continuando com o artigo apresentado na edição passada de comunicação USB com o PIC, continuaremos nesta edição o estudo do
Sistemas Operacionais. Prof. M.Sc. Sérgio Teixeira. Aula 04 - Concorrência. Cursos de Computação
 Cursos de Computação Sistemas Operacionais Prof. M.Sc. Sérgio Teixeira Aula 04 - Concorrência Referência: MACHADO, F.B. ; MAIA, L.P. Arquitetura de Sistemas Operacionais. 4.ed. LTC, 2007. Mono x Multiprogramação
Cursos de Computação Sistemas Operacionais Prof. M.Sc. Sérgio Teixeira Aula 04 - Concorrência Referência: MACHADO, F.B. ; MAIA, L.P. Arquitetura de Sistemas Operacionais. 4.ed. LTC, 2007. Mono x Multiprogramação
Capítulo 12. Projeto 5 Controle de Motores de Passo. 12.1 Circuito e Funcionamento
 Capítulo 12 Projeto 5 Controle de Motores de Passo A crescente popularidade dos motores de passo deve-se a sua adaptação à lógica digital. Estes dispositivos são usados em inúmeras aplicações, tais como:
Capítulo 12 Projeto 5 Controle de Motores de Passo A crescente popularidade dos motores de passo deve-se a sua adaptação à lógica digital. Estes dispositivos são usados em inúmeras aplicações, tais como:
ENTRADA E SAÍDA DE DADOS
 ENTRADA E SAÍDA DE DADOS Os dispositivos de um computador compartilham uma única via de comunicação BARRAMENTO. BARRAMENTO Elétrica/Mecânica + Protocolo. GERENCIAMENTO DE E/S O controle da troca de dados
ENTRADA E SAÍDA DE DADOS Os dispositivos de um computador compartilham uma única via de comunicação BARRAMENTO. BARRAMENTO Elétrica/Mecânica + Protocolo. GERENCIAMENTO DE E/S O controle da troca de dados
Entradas/Saídas. Programação por interrupções Conceitos gerais Programação da porta série Transmissão
 Entradas/Saídas Programação por interrupções Conceitos gerais Programação da porta série Transmissão Problemas a resolver Como identificar a interrupção? Motivo da interrupção Que rotina executar? Como
Entradas/Saídas Programação por interrupções Conceitos gerais Programação da porta série Transmissão Problemas a resolver Como identificar a interrupção? Motivo da interrupção Que rotina executar? Como
Sistemas Operacionais
 Sistemas Operacionais Sistemas de Entrada/Saída Princípios de Hardware Sistema de Entrada/Saída Visão Geral Princípios de Hardware Dispositivos de E/S Estrutura Típica do Barramento de um PC Interrupções
Sistemas Operacionais Sistemas de Entrada/Saída Princípios de Hardware Sistema de Entrada/Saída Visão Geral Princípios de Hardware Dispositivos de E/S Estrutura Típica do Barramento de um PC Interrupções
Processos e Threads (partes I e II)
") Processos e Threads (partes I e II) 1) O que é um processo? É qualquer aplicação executada no processador. Exe: Bloco de notas, ler um dado de um disco, mostrar um texto na tela. Um processo é um programa
Processos e Threads (partes I e II) 1) O que é um processo? É qualquer aplicação executada no processador. Exe: Bloco de notas, ler um dado de um disco, mostrar um texto na tela. Um processo é um programa
Manual do usuário. Softcall Java. versão 1.0.5
 Manual do usuário Softcall Java versão 1.0.5 Sumário Iniciando SoftCall...3 Tela Principal...3 Configurando o SoftCall...4 Agenda...5 Incluindo um contato...5 Procurando um contato...6 Apagando um contato...6
Manual do usuário Softcall Java versão 1.0.5 Sumário Iniciando SoftCall...3 Tela Principal...3 Configurando o SoftCall...4 Agenda...5 Incluindo um contato...5 Procurando um contato...6 Apagando um contato...6
Manual de utilização do módulo NSE METH-8RL/Exp
 INSTALAÇÃO 1 - Baixe o arquivo Software Configurador Ethernet disponível para download em www.nse.com.br/downloads-manuais e descompacte-o em qualquer pasta de sua preferência. 2 - Conecte a fonte 12Vcc/1A
INSTALAÇÃO 1 - Baixe o arquivo Software Configurador Ethernet disponível para download em www.nse.com.br/downloads-manuais e descompacte-o em qualquer pasta de sua preferência. 2 - Conecte a fonte 12Vcc/1A
Projecto Final de Curso 2004/2005 RESPIFE. Reengenharia de Sistema Produtivo Integrado para Fins Educacionais. Guia do Robot
 RESPIFE Reengenharia de Sistema Produtivo Integrado para Fins Educacionais Guia do Robot Alunos: Filipe Barbosa de Sá Pinto, nº. 0005030955 Rui Alexandre da Costa Ribeiro, n.º 000503073 Docente: Armando
RESPIFE Reengenharia de Sistema Produtivo Integrado para Fins Educacionais Guia do Robot Alunos: Filipe Barbosa de Sá Pinto, nº. 0005030955 Rui Alexandre da Costa Ribeiro, n.º 000503073 Docente: Armando
O Manual do ssc. Peter H. Grasch
 Peter H. Grasch 2 Conteúdo 1 Introdução 6 2 Usar o ssc 7 2.1 Gerir os utilizadores.................................... 7 2.1.1 Adicionar um utilizador.............................. 8 2.1.1.1 Associar-se
Peter H. Grasch 2 Conteúdo 1 Introdução 6 2 Usar o ssc 7 2.1 Gerir os utilizadores.................................... 7 2.1.1 Adicionar um utilizador.............................. 8 2.1.1.1 Associar-se
RCO2. Introdução à camada física
 RCO2 Introdução à camada física 1 Transmissão de uma stream de bits por um meio de transmissão 2 Atribuições da camada física: Transmissão de sequências de bits pelo meio físico Modulação (transmissão
RCO2 Introdução à camada física 1 Transmissão de uma stream de bits por um meio de transmissão 2 Atribuições da camada física: Transmissão de sequências de bits pelo meio físico Modulação (transmissão
LINEAR EQUIPAMENTOS RUA SÃO JORGE, 269 - TELEFONE : 6823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250
 1 LINEAR EQUIPAMENTOS RUA SÃO JORGE, 269 - TELEFONE : 6823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250 O Sistema HCS 2000 é composto por: PROTOCOLO DE COMUNICAÇÃO SISTEMA HCS 2000 v6.x Receptores: dispositivos
1 LINEAR EQUIPAMENTOS RUA SÃO JORGE, 269 - TELEFONE : 6823-8800 SÃO CAETANO DO SUL - SP - CEP: 09530-250 O Sistema HCS 2000 é composto por: PROTOCOLO DE COMUNICAÇÃO SISTEMA HCS 2000 v6.x Receptores: dispositivos
ICORLI. INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET
 INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET 2010/2011 1 Protocolo TCP/IP É um padrão de comunicação entre diferentes computadores e diferentes sistemas operativos. Cada computador deve
INSTALAÇÃO, CONFIGURAÇÃO e OPERAÇÃO EM REDES LOCAIS e INTERNET 2010/2011 1 Protocolo TCP/IP É um padrão de comunicação entre diferentes computadores e diferentes sistemas operativos. Cada computador deve
Capítulo 4. MARIE (Machine Architecture Really Intuitive and Easy)
") Capítulo 4 João Lourenço Joao.Lourenco@di.fct.unl.pt Faculdade de Ciências e Tecnologia Universidade Nova de Lisboa 2007-2008 MARIE (Machine Architecture Really Intuitive and Easy) Adaptado dos transparentes
Capítulo 4 João Lourenço Joao.Lourenco@di.fct.unl.pt Faculdade de Ciências e Tecnologia Universidade Nova de Lisboa 2007-2008 MARIE (Machine Architecture Really Intuitive and Easy) Adaptado dos transparentes
INSTALAÇÃO MICROTERMINAL FIT BASIC BEMATECH
 INSTALAÇÃO MICROTERMINAL FIT BASIC BEMATECH Objetivo Este documento tem como finalidade descrever o processo de instalação e configuração do Microterminal Fit Basic - Bematech. Instalação do Microterminal
INSTALAÇÃO MICROTERMINAL FIT BASIC BEMATECH Objetivo Este documento tem como finalidade descrever o processo de instalação e configuração do Microterminal Fit Basic - Bematech. Instalação do Microterminal
Sistemas Operacionais Gerência de Dispositivos
 Universidade Estadual de Mato Grosso do Sul UEMS Curso de Licenciatura em Computação Sistemas Operacionais Gerência de Dispositivos Prof. José Gonçalves Dias Neto profneto_ti@hotmail.com Introdução A gerência
Universidade Estadual de Mato Grosso do Sul UEMS Curso de Licenciatura em Computação Sistemas Operacionais Gerência de Dispositivos Prof. José Gonçalves Dias Neto profneto_ti@hotmail.com Introdução A gerência
Manual do Utilizador para DS150E. Dangerfield June. 2009 V3.0 Delphi PSS
 Manual do Utilizador para DS150E 1 ÍNDICE Componente principal.....3 Instruções de instalação.... 5 Configurar o Bluetooth...26 Programa de diagnóstico....39 Escrever no ECU (OBD)...86 Digitalizar.89 Histórico......94
Manual do Utilizador para DS150E 1 ÍNDICE Componente principal.....3 Instruções de instalação.... 5 Configurar o Bluetooth...26 Programa de diagnóstico....39 Escrever no ECU (OBD)...86 Digitalizar.89 Histórico......94
Organização de Computadores 1
 Organização de Computadores 1 SISTEMA DE INTERCONEXÃO (BARRAMENTOS) Prof. Luiz Gustavo A. Martins Arquitetura de von Newmann Componentes estruturais: Memória Principal Unidade de Processamento Central
Organização de Computadores 1 SISTEMA DE INTERCONEXÃO (BARRAMENTOS) Prof. Luiz Gustavo A. Martins Arquitetura de von Newmann Componentes estruturais: Memória Principal Unidade de Processamento Central
Tais operações podem utilizar um (operações unárias) ou dois (operações binárias) valores.
 ou dois (operações binárias) valores.") Tais operações podem utilizar um (operações unárias) ou dois (operações binárias) valores. 7.3.1.2 Registradores: São pequenas unidades de memória, implementadas na CPU, com as seguintes características:
Tais operações podem utilizar um (operações unárias) ou dois (operações binárias) valores. 7.3.1.2 Registradores: São pequenas unidades de memória, implementadas na CPU, com as seguintes características:
ABB Automação. 13.82kV 119.4kA. 13.81kV 121.3kA. 13.85kV 120.2kA IDR 144 INDICADOR DIGITAL REMOTO MODO DE USO
 IDR 144 INDICADOR DIGITAL REMOTO MODO DE USO 13.82kV 119.4kA 13.81kV 121.3kA 13.85kV 120.2kA Dados Técnicos Conexões elétricas Utilização do teclado Protocolo de comunicação Modbus RTU Dimensional ABB
IDR 144 INDICADOR DIGITAL REMOTO MODO DE USO 13.82kV 119.4kA 13.81kV 121.3kA 13.85kV 120.2kA Dados Técnicos Conexões elétricas Utilização do teclado Protocolo de comunicação Modbus RTU Dimensional ABB
Flip-Flops (Aplicações) Prof. Rômulo Calado Pantaleão Camara
 Prof. Rômulo Calado Pantaleão Camara") Flip-Flops (Aplicações) Prof. Rômulo Calado Pantaleão Camara Carga Horária: 2h/60h Pulsos Digitais Pulso positivo: executa sua função quando está em nível alto Pulso negativo: executa sua função quando
Flip-Flops (Aplicações) Prof. Rômulo Calado Pantaleão Camara Carga Horária: 2h/60h Pulsos Digitais Pulso positivo: executa sua função quando está em nível alto Pulso negativo: executa sua função quando
Sistema de Numeração e Códigos. CPCX UFMS Prof. Renato F. dos Santos
 Sistema de Numeração e Códigos CPCX UFMS Prof. Renato F. dos Santos 2.4 Código BCD (Binary-coded decimal) Quando um número decimal é representado pelo seu número binário equivalente, dizemos que é uma
Sistema de Numeração e Códigos CPCX UFMS Prof. Renato F. dos Santos 2.4 Código BCD (Binary-coded decimal) Quando um número decimal é representado pelo seu número binário equivalente, dizemos que é uma
E/S PROGRAMADA E/S PROGRAMADA E/S USANDO INTERRUPÇÃO
 E/S PROGRAMADA QUANDO A CPU FAZ TODO O TRABALHO RELACIONADO A UMA OPERAÇÃO DE E/S, NO CASO DO PROCESSO QUERER IMPRIMIR (NA IMPRESSORA) ABCDEFGH : ESTES CARACTERES SÃO COLOCADOS EM UMA ÁREA DE MEMÓRIA DO
E/S PROGRAMADA QUANDO A CPU FAZ TODO O TRABALHO RELACIONADO A UMA OPERAÇÃO DE E/S, NO CASO DO PROCESSO QUERER IMPRIMIR (NA IMPRESSORA) ABCDEFGH : ESTES CARACTERES SÃO COLOCADOS EM UMA ÁREA DE MEMÓRIA DO
Memória Flash. PdP. Autor: Tiago Lone Nível: Básico Criação: 11/12/2005 Última versão: 18/12/2006. Pesquisa e Desenvolvimento de Produtos
 TUTORIAL Memória Flash Autor: Tiago Lone Nível: Básico Criação: 11/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
TUTORIAL Memória Flash Autor: Tiago Lone Nível: Básico Criação: 11/12/2005 Última versão: 18/12/2006 PdP Pesquisa e Desenvolvimento de Produtos http://www.maxwellbohr.com.br contato@maxwellbohr.com.br
3. Arquitetura Básica do Computador
 3. Arquitetura Básica do Computador 3.1. Modelo de Von Neumann Dar-me-eis um grão de trigo pela primeira casa do tabuleiro; dois pela segunda, quatro pela terceira, oito pela quarta, e assim dobrando sucessivamente,
3. Arquitetura Básica do Computador 3.1. Modelo de Von Neumann Dar-me-eis um grão de trigo pela primeira casa do tabuleiro; dois pela segunda, quatro pela terceira, oito pela quarta, e assim dobrando sucessivamente,
Comunicação Serial. Comunicação Serial RS232
 Comunicação Serial Motivação Diversos dispositivos eletrônicos usam portas seriais para se comunicar com outros dispositivos eletrônicos. Para muitos é a única forma de comunicação. A integração de equipamentos
Comunicação Serial Motivação Diversos dispositivos eletrônicos usam portas seriais para se comunicar com outros dispositivos eletrônicos. Para muitos é a única forma de comunicação. A integração de equipamentos
CAPÍTULO 6 COMUNICAÇÃO SERIAL
 CAPÍTULO 6 COMUNICAÇÃO SERIAL DEIXADO INTENCIONALMENTE EM BRANCO ÌNDICE 1 COMUNICAÇÃO SERIAL... 5 1.1 - Enviar um arquivo do Proteo... 6 1.2 - Receber um arquivo No Proteo... 9 1.3 - Verificando resultados
CAPÍTULO 6 COMUNICAÇÃO SERIAL DEIXADO INTENCIONALMENTE EM BRANCO ÌNDICE 1 COMUNICAÇÃO SERIAL... 5 1.1 - Enviar um arquivo do Proteo... 6 1.2 - Receber um arquivo No Proteo... 9 1.3 - Verificando resultados
Gerência de Entrada/Saída
 Gerência de Entrada/Saída Prof Clodoaldo Ap Moraes Lima 1 Princípios básicos de hardware Periférico é um dispositivo conectado a um computador de forma a possibilitar sua interação com o mundo externo
Gerência de Entrada/Saída Prof Clodoaldo Ap Moraes Lima 1 Princípios básicos de hardware Periférico é um dispositivo conectado a um computador de forma a possibilitar sua interação com o mundo externo
28/9/2010. Unidade de Controle Funcionamento e Implementação
 Arquitetura de Computadores Unidade de Controle Funcionamento e Implementação Prof. Marcos Quinet Universidade Federal Fluminense P.U.R.O. Operação da Unidade de Controle Unidade de controle: parte do
Arquitetura de Computadores Unidade de Controle Funcionamento e Implementação Prof. Marcos Quinet Universidade Federal Fluminense P.U.R.O. Operação da Unidade de Controle Unidade de controle: parte do
Gerenciamento de Entrada e Saída Hélio Crestana Guardia e Hermes Senger
 Gerenciamento de Entrada e Saída Hélio Crestana Guardia e Hermes Senger O controle da entrada e saída (E/S ou I/O, input/output) de dados dos dispositivos é uma das funções principais de um sistema operacional.
Gerenciamento de Entrada e Saída Hélio Crestana Guardia e Hermes Senger O controle da entrada e saída (E/S ou I/O, input/output) de dados dos dispositivos é uma das funções principais de um sistema operacional.
Serial Paralela USB FireWire(IEEE1394)
") Serial Paralela USB FireWire(IEEE1394) histórico Tudo começou em 1980 quando a IBM estava desenvolvendo seu primeiro micro PC. Já haviam definido que o barramento ISA seria usado para permitir que o IBM
Serial Paralela USB FireWire(IEEE1394) histórico Tudo começou em 1980 quando a IBM estava desenvolvendo seu primeiro micro PC. Já haviam definido que o barramento ISA seria usado para permitir que o IBM
Arquitectura de Computadores
 Unidade de Entrada/Saída (I/O) Nuno Cavaco Gomes Horta Universidade Técnica de Lisboa / Instituto Superior Técnico Sumário Introdução Unidade de Processamento Unidade de Controlo Conjunto de Instruções
Unidade de Entrada/Saída (I/O) Nuno Cavaco Gomes Horta Universidade Técnica de Lisboa / Instituto Superior Técnico Sumário Introdução Unidade de Processamento Unidade de Controlo Conjunto de Instruções
Comunicação Serial com o AVR ATMEGA8
 Comunicação Serial com o AVR ATMEGA8 Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução Os microcontroladores AVR vem a cada dia tomando cada vez mais espaço nos novos projetos eletrônicos microcontrolados.
Comunicação Serial com o AVR ATMEGA8 Vitor Amadeu Souza vitor@cerne-tec.com.br Introdução Os microcontroladores AVR vem a cada dia tomando cada vez mais espaço nos novos projetos eletrônicos microcontrolados.
COMUNICAÇÃO SERIAL ENTRE EQUIPAMENTOS
 COMUNICAÇÃO SERIAL ENTRE EQUIPAMENTOS 1 Introdução Para transmitir ou receber informações de outros dispositivos é necessário que os sistemas automáticos sejam capazes de comunicarem-se com estes dispositivos.
COMUNICAÇÃO SERIAL ENTRE EQUIPAMENTOS 1 Introdução Para transmitir ou receber informações de outros dispositivos é necessário que os sistemas automáticos sejam capazes de comunicarem-se com estes dispositivos.
Projecto de uma placa com DIP-Switches e LCD com ligação à placa DETIUA
 Sistemas Digitais Reconfiguráveis Projecto de uma placa com DIP-Switches e LCD com ligação à placa DETIUA Liliana Rocha Nicolau Lopes da Costa 27611 Ano Lectivo de 2006/2007 Universidade de Aveiro 1. Objectivos
Sistemas Digitais Reconfiguráveis Projecto de uma placa com DIP-Switches e LCD com ligação à placa DETIUA Liliana Rocha Nicolau Lopes da Costa 27611 Ano Lectivo de 2006/2007 Universidade de Aveiro 1. Objectivos
AVALIAÇÃO À DISTÂNCIA 1 GABARITO
 Fundação CECIERJ - Vice Presidência de Educação Superior a Distância Curso de Tecnologia em Sistemas de Computação UFF Disciplina INTRODUÇÃO À INFORMÁTICA... AD1 2 semestre de 2008. Data... AVALIAÇÃO À
Fundação CECIERJ - Vice Presidência de Educação Superior a Distância Curso de Tecnologia em Sistemas de Computação UFF Disciplina INTRODUÇÃO À INFORMÁTICA... AD1 2 semestre de 2008. Data... AVALIAÇÃO À